Análisis de señales por métodos estadísticos
Anuncio

Análisis de señales por métodos estadísticos
Paula Brudny1, Laura Pérez2, Carlos D´Attellis3
División Aplicaciones Científicas
Centro de Cálculo Científico
Comisión Nacional de Energía Atómica
Av. Del Libertador 8250 (1429) Buenos Aires
ARGENTINA-
Resumen
El trabajo trata acerca de la aplicación de dos metodologías basadas en conceptos
probabilísticos al análisis de señales perturbadas con ruido de características desconocidas.
En ambos casos, el objetivo es definir parámetros que permitan detectar cambios en la
forma, periodicidad o amplitud de las señales que permitan una comparación con patrones
dados, para clasificar las señales obtenidas en grupos como funcionamiento “normal” o no de
un proceso, reconocimiento de patrones. Se trata de obtener alguna ventaja sobre los métodos
tradicionales (análisis de Fourier, por ejemplo), o una alternativa que permita aprovechar
información oculta en las señales registradas.
Uno de los enfoques se basa en el estudio de las distribuciones de amplitud de las señales.
Más allá del rango de valores de esta distribución, que depende fuertemente de las
condiciones de cada experimento, la “forma” de esta distribución habla a su vez de la “forma”
de las ondas que constituyen la señal, aspecto descuidado por las técnicas habituales de
análisis espectral. Se buscan entonces cambios en la forma de esta distribución.
El otro enfoque se basa en el concepto de “distancia entrópica”, que da una medida
probabilística de la diferencia entre las dos señales. Para esto, primero se ajusta cada señal
(centrada) a un modelo autoregresivo (AR), y luego se comparan estos modelos mediante un
coeficiente de verosimilitud. Este método, originalmente orientado a la detección de pequeños
terremotos en señales sísmicas, diferenciándolos del ruido, permite comparar una señal
obtenida con otra previamente dada, o seguir la evolución de un proceso para controlar su
apartamiento del comportamiento esperado.
Los resultados se aplicaron sobre señales de emisión acústica (SEA) producidas en
laboratorio: la evolución del desgaste de una pieza a lo largo de un proceso prolongado, con el
objetivo de detectar un umbral de tolerancia del desgaste admisible.
1. Estudio de la distribución de amplitudes
1.1 Parámetros estudiados
-
2
CONICET-Actualmente en la Universidad Nacional de Rio Cuarto, Argentina.
Actualmente en la Universidad de San Andrés Argentina.
3
Actualmente en la Universidad Favaloro y Universidad Nacional de San Martín, Argentina.
E-mail:
ceda@favaloro.edu.ar
Este trabajo fue parcialmente subvencionado por la International Atomic Energy Agency, Research Contract
5987/RB
1
Este método se basa en los resultados obtenidos por Kannatey-Asibn y Dornfeld [4] e intenta
reconocer diferencias entre señales a través del estudio de la distribución de amplitudes.
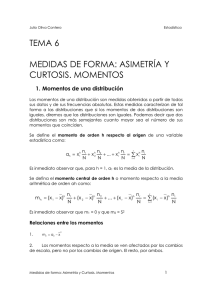
Básicamente la distribución de amplitudes se obtiene haciendo un gráfico de las frecuencia
con que se dan las diferentes ordenadas de la señal. Se traza un conjunto de paralelas al eje x y
se cuenta el número de cruces de tales líneas. Una zona de baja pendiente de la señal
incrementará el valor de la frecuencia relativa en el intervalo correspondiente a sus ordenadas.
De este modo el “aspecto” de la curva (por ejemplo la curvatura de los extremos) se verá
reflejada en el aspecto de la distribución (Fig. 1).
En este punto aparecen dos puntos a considerar. Uno es el rango de valores de la
distribución y otro es la forma de la misma. La caracterización de texturas a través del estudio
de perfiles de superficies (problema análogo si pensamos la altura del perfil en función del
espacio como la señal en función del tiempo) ha mostrado que es en la forma de la
distribución donde aparecen los aspectos reveladores de cambios en la “forma” de las curvas.
Son los momentos de orden 3 y 4 los que están relacionados con la forma de una
distribución. Se define la asimetría (skew) como el momento normalizado de orden 3 o sea
S=
∞
1
σ
3
∫ [x − E ( x)]
3
f ( x )dx,
−∞
donde f es la función de densidad de probabilidad de la variable x, y σ la desviación standard.
Es esencialmente una medida de la asimetría de la señal alrededor de su línea media. Por
ejemplo con “picos” apuntando hacia arriba tendría asimetría positiva mientras que una con
“picos” apuntando hacia abajo tendría asimetría negativa. Esta regla es generalmente válida.
Otra característica es que la mayoría de las ordenadas aparecen en el lado opuesto de la línea
media hacia la dirección de la asimetría.
La curtosis muestra un aspecto completamente diferente. Se define como el momento de
orden 4 normalizado o sea:
K=
∞
1
σ
4
∫ [x − E ( x )]
4
f ( x )dx ,
−∞
y mide la “agudeza” del trazo de la señal. Los valores se comparan con el valor de la curtosis
de la distribución de Gauss, que es 3. Un valor mayor implica, generalmente, una distribución
con un pico más agudo, o sea que la mayoría de los valores están concentrados en un rango
pequeño. Un valor menor habla de una distribución más chata.
Cuando no se conocen las distribuciones de las variables pero se dispone de datos discretos
pueden usarse estimadores. En general un estimador del momento centrado de orden r es
Mr =
donde N es el número de datos y x =
respectivamente:
1 N
∑ ( x k − x )r ,
N k =1
1 N
∑ x k . Estimadores de la asimetría y la curtosis son
N k =1
S=
M3
K=
y
3
M22
M4
M 22
.
S y K podrían ser utilizados como parámetros característicos de la curva para diferenciarla de
otra de distinta forma. Un problema con estos parámetros es que son muy sensibles a los datos
extremos aislados, ya que los valores de la variable entran al cubo y a la cuarta en su cálculo.
Además no son independientes, esto es, un valor alto de asimetría va generalmente con un
valor alto de curtosis. Para solucionar esta cuestión se asimilan los datos a una distribución
Beta.
Esta distribución es la de una variable definida entre 0 y 1, que depende de dos parámetros
a y b, cuya función de densidad está dada por
f ( x) =
1
x a −1 (1 − x ) b−1 ,
β ( a , b)
1
donde β ( a, b) = ∫ y a −1 (1 − y ) b−1 dy .
0
Puede verse que para esta distribución
m = E ( x) =
a
a+b
σ 2 = Var ( x ) =
(1)
ab
(2)
(a + b + 1)(a + b )2
1
2( b − a ) a + b + 1 2
Sβ =
a + b + 2 ab
Kβ =
[
]
3 ( a + b + 1) 2 (a − b )2 + ab (a + b + 2 )
,
(a + b + 2 )(a + b + 3) ab
donde Sβ y Kβ son la asimetría y la curtosis respectivamente.
La forma de la distribución cambia según los valores de los parámetros a y b. Por ejemplo
si alguno de ellos es menor que 1 la distribución es en forma de “U”, si son distintos la
distribución es asimétrica, si ambos son mayores que 2 es unimodal, etc.
Estos parámetros, que caracterizan totalmente a la distribución Beta, son independientes
entre sí. De este modo, cada par (a, b) caracteriza una forma de distribución de amplitudes.
Además pueden ser estimados a partir de los datos. Para ello se escala previamente la señal
para transformarla en una variable cuyo rango se extiende ente 0 y 1. Definimos
y=
x − x min
.
x max − x min
Despejando de las ecuaciones (1) y (2) y reemplazando m y σ por los estimadores antedichos
calculados en base a la variable y, se obtiene
aˆ =
(
M 1 M 1 − M 12 − M 2
M2
(
)
)
(1 − M 1 ) M 1 − M 12 − M 2
bˆ =
.
M2
De este modo, representando cada conjunto de datos por un punto en el dominio ( aˆ , bˆ) , se
podrían detectar cambios en la forma de la distribución de amplitudes correspondientes a
cambios en el aspecto de la señal debidos, a su vez, al desgaste o falla en la herramienta
actuante.
1.2. Resultados obtenidos
Mostramos los resultados de un experimento en que se tomaron muestras de SEA en dos
etapas del rodamiento de una crapodina sin lubricación, al principio y hacia el final, antes de
que se desgastara totalmente. Para cada una de las muestras se calcularon M1 , M2 , M3 y M4,
la asimetría y la curtosis de la muestra, y los estimadores de los parámetros a y b de la
distribución Beta, tomando subconjuntos que abarcaran aproximadamente 10 veces el período
fundamental . Se graficaron en el plano K contra S, Kβ contra Sβ , y aˆ contra bˆ. Puede
observarse en las figuras 2, 3, y 4 que sería factible establecer límites entre la zona donde se
ubican los datos producidos por la crapodina al comienzo de la experiencia y aquéllos
emitidos momentos antes de la destrucción.
2. Distancia entrópica
2.1. Introducción
Esta sección da cuenta de los elementos para el análisis basado en el concepto de distancia
entrópica [3].
El método se basa en comparar la señal obtenida con otra preexistente, que se utiliza como
referencia. Para esto, la señales se ajustan a un modelo AR de orden p a determinar:
p
∑ a i x t −i = ε t ,
i =0
a 0 = 1,
{ε t } variables aleatorias gaussianas con E [ε t ] = 0 ; E [ε i ε j ] = δ ijσ ε , y ai los coeficientes del
modelo.
Dadas las primeras p observaciones de una muestra x = ( x1 ,..., x N ) t , donde t indica transposición, llamand
a = ( a1 ,..., x p ) t ; b = (1, a1 ,..., x p ) t resultan los estimadores por mínimos cuadrados :
aˆ = − D −1d ;
σˆ ε 2 = bˆ t C bˆ,
donde :
[ ]
C = Cij ;
Cij =
1 N
∑ X t −i X t − j ,
N ´ t = p +1
i, j = 0,..., p;
bˆ = (1, aˆ1 ,..., aˆ p ) t ;
N ´ = N − p;
C11 ... C1 p
...
. ;
D= .
C p1 ... C pp
d = (C 01 ,..., C 0 p ) t .
Suponemos que el modelo es asintóticamente estacionario, es decir, todas las raíces µ i del
polinomio a ( z ) = 1 + a1z + ... + ak z k satisfacen µi > 1 . Una vez identificados los parámetros
(esto es, los coeficientes ai ,1 ≤ i ≤ p, y σ t ), es posible escribir la función de probabilidad de la
muestra.
Se desea comparar una muestra de referencia {xR}, de longitud NR, con otra de “test” {xT},
de longitud NT . Ajustando ambas a un modelo del mismo orden p, es posible calcular también
la probabilidad conjunta.
Bajo la hipótesis H0 = “ambas muestras responden al mismo modelo”, se tendrán
parámetros σ p y a p y resulta la máxima probabilidad Lo,
L0 =
1
(σˆ p 2π )
N ´ R N ´T
{
}
Exp − 1 ( N ´ R + N ´T .
2
Bajo la hipótesis H1 = “las muestras responden a distintos modelos” , se tendrán dos
juegos de parámetros (σ R , a R ), (σ T , a T ) , y entonces
L1 =
1
σˆ RN ´R σˆ TN ´T ( 2π ) N ´R + N ´T
{
}
Exp − 12 ( N ´ R + N ´T .
Por lo tanto el cociente de verosimilitud resulta:
N´
N´
L0 σˆ R R σˆ T T
λ=
=
.
L1
σˆ pN ´R + N ´T
Se define entonces la distancia entrópica
d = −2 ln λ = ( N ´ R + N ´ T ) ln(σˆ 2p ) − N ´ R ln(σˆ R2 ) − N ´ T ln(σˆ T2 ) )-
En condiciones normales, éste es un número no negativo (se debe estar alerta a la aparición
de matrices mal condicionadas), y, además, es cero si y sólo si σˆ R = σˆ T y aˆ R = aˆ T , es
decir, si los modelos identificados resultan iguales.
Una variación en la amplitud de las señales modificará el estimador de la varianza, sin
modificar los coeficientes del polinomio, en tanto que modificaciones en las frecuencias
afectarán a todo el modelo.
2.2. Resultados obtenidos
Al implementar este criterio, hay dos decisiones que deben tomarse: el orden de los modelos a
ajustar, y la cantidad de puntos a considerar. Para elegir el orden, se tomaron en consideración
el modelo FPE de Akaike y diversas pruebas hechas sobre distintos grupos de datos. Se
observó que, para los datos analizados, si bien el mínimo de FPE se obtiene para órdenes
relativamente altos (7 o más) su valor cae abruptamente del orden 2 al 3, y luego las
variaciones son muy pequeñas. Asimismo, las distancias calculadas con distintos órdenes de
ajuste (mayores que 3) preservan la monotonía (al menos en las muestras tomadas; no se
intentó una demostración teórica). Por esto, frente al ahorro computacional que significa,
pensando en la implementación en tiempo real, se decidió trabajar con ajustes de orden 3.
La cantidad de puntos en cada segmento a identificar es una variable de trabajo dentro del
problema. Si la señal presenta una marcada periodicidad, una vez incluidos un cierto número
de períodos la información es redundante y el modelo identificado no se altera mayormente.
En cambio, si presenta grandes variaciones, pretender un único modelo de ajuste que
contenga toda la señal resulta una pérdida de información. Por eso, los algoritmos de
segmentación descriptos más abajo detectan las variaciones cuando los modelos identificados
al tomar sólo parte de los puntos resultan diferentes. Es sin embargo un problema a explorar
la longitud óptima de los segmentos.
Se presentan aquí los resultados de aplicar estos conceptos a SEA provenientes del
desgaste de la crapodina.
En primer lugar, se buscaron variaciones dentro de la señal haciendo sucesivas
fragmentaciones “anidadas” de la misma (semejantes a un algoritmo de bisección),
comparando las distancias computadas entre los segmentos.
Las muestras provenientes del desgaste de la crapodina mostraban grandes diferencias,
evidentes a simple vista, incluso dentro del mismo grupo (las del comienzo y las del final).
Estas diferencias se detectan en las distancias calculadas, lo que es un comportamiento
deseable para permitir la automatización del sistema, si bien no permiten discriminar con
fineza los dos grupos (ver Tablas I y II; ya que las matrices son simétricas, los valores se
consignan sólo una vez).
3. Referencias
[1] André-Obbrecht, R., “On line segmentation of speech signals without prior recognition”, en Detection in
Abrupt Changes in Signals and Dynamical Systems, Ed. Basseville y Benveniste, Springer Verlag, 1986.
[2] Basseville, M., “The two-models approach for the on-line detection of changes in AR processes”, en
Detection in Abrupt Changes in Signals and Dynamical Systems, Ed. Basseville y Benveniste, Springer
Verlag, 1986.
[3] Chen, C., “On a segmentation algorthm for seismic signals”, Geoexploration, 23(1984/85)35-40.
[4] Kannatey-Asibu, E. Jr. y Dornfeld, D.A., “A study of tool wear using statistical analysis of metal- cutting
acoustic emission”, Wear, 76(1982)247-261.
[5] Whitehouse, D.J., “Beta functions for surface topology”, Ann. CIRP, 27(1978)491-497.
Tabla I: Distancias calculadas con ajustes de orden 3 tomando segmentos de 4096 puntos (los
segmentos ca y cb corresponden al comienzo del experimento y los fa, fb y fc al final.
cb
fa
fb
fc
1034.7
3389.7
2821.6
5671.1
ca
0.0
1253.1
1889.5
3572.7
cb
0.0
1209.1
1563.9
fa
0.0
3297.5
fb
Tabla II: Distancias calculadas con ajustes de orden 3 tomando segmentos de 2048 puntos (los segmentos 1 y 2
son las dos mitades de los correspondientes en la Tabla I).
ca1
ca2
cb1
cb2
fa1
fa2
fb1
fb2
fc1
522.1
0.0
ca2
1470.3
711.8
0.0
cb1
164.9
227.1
777.9
0.0
cb2
1866.1
1839.8
731.2
1397.5
0.0
fa1
1384.2
1546.3
565.4
957.1
114.4
0.0
fa2
1434.9
1153.3
1169.3
1154.2
670.1
594.4
0.0
fb1
1502.9
1160.7
1107.0
1196.4
580.5
523.8
4.6
0.0
fb2
3311.6
2738.3
1716.4
2810.9
676.2
1166.4
1727.5
1673.9
0.0
fc1
3092.1
2601.4
1435.7
2554.4
542.4
974.1
1647.2
1574.5
35.1
fc2