MyFlyDream AutoPilot
Anuncio

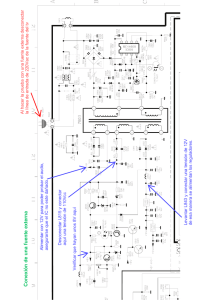
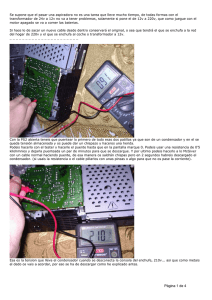
AP MDF CONEXIONES ( PARTE I): MyFlyDream AutoPilot V1.16 beta 1-HARDWARE Y CARACTERISTICAS: COMPONENTE DESIGNACION A Piloto automatic Myflighdream B GPS C F SENSOR DE CORRIENTE 100A (opcional de 50A) Cables de conexion para Camara y Tx, cables apantallados Cable para conexion PA a Rx de mando Jumper G Cable USB para actualizaciones D E El PA de myflighdream está construido y diseñado en giroscopos para los 3 ejes, Acelerometros en cada uno de los 3 ejes, compas digital para los 3 ejes y un barómetro. El PA dispone de tres CPU, una de ellas se encarga de los cálculos para la condición de vuelo y la otra CPU se encarga de la presentación de datos OSD y el control de vuelo. Basado en este avanzado hardware el PA puede hacerse con el control de vuelo de tu avión para volar de acuerdo a way points que se hayan definido previamente, o tomar el control integral del avión para traerlo casa automáticamente. La características especiales que se incluyen en este PA son: 1-completo control AHRS, máximo coeficiente angular 2000deg/s 2- Tecnóloga de PIXEL en blanco y negro para el OSD con alto ratio de refresco para evitar latencia en pantalla. 3- Compatibilidad total con sistema de seguimiento ATT, se puede usar directamente con el sistema de seguimiento de antena de la marca MDF el ATT driver. 4-Acceso a cualquier parámetro y función para ser modificada. En especial, los usuarios pueden definir way points con visibilidad en el OSD. 5- Soporta Protocolo MAVlink. Con lo que se puede usar el APM misión planner para definir los puntos de ruta o way points con presentación del recorrido del avión en mapa en tiempo real. También hay algunas aplicaciones para móviles que pueden usarse con el PA de MFD. 1-Especificaciones: COMENTARIOS/ DESCRIPCION PESO 30gr Tension de alimentacion 7 a 20V ( Se recomienda 12v) Consumo Canales de entrada PWM Menos de 200mAh con GPS (sin ningún otro dispositivo electrónico conectado) 6 en modo PWM / 8 en modo PPM Salidas PWM 4 Máxima rotación angular 2000 grados/s Modos de vuelo Número máximo de way points Manual, estabilizado, circular, altitud, way point / vuelta a casa 10 Tipos de aviones disponibles Normal, Ala de combate, cola en V 2- CONEXIONADO: Para videos demostrativos de como se conexionan los diferentes componentes visitar los siguientes enlaces: https://www.youtube.com/watch?v=FDD5mXKBuZ0 https://www.youtube.com/watch?v=6QTSkW3O4-0 Vamos viendo uno a uno los puertos de conexión y como se conexiona cada dispositivo: A: PUERTO DE ALIMENTACION: Aquí es donde conectaremos la LIPO de alimentación. Este puerto se encarga de alimentar el PA. El PA dispone de un switch interno de transformación a 5v, con lo cual se pueden conectar en este puerto de alimentación baterías desde 7 a 20v. Sin embargo, la cámara y el transmisor de video toman alimentación desde este puerto. Muchas de las cámaras y TX de video son a 12V, por lo que se recomienda alimentar el PA con lipos 3S, o bien usar un ubec para alimentar a 12v desde la batería principal. Esto hará una conexión más limpia y sencilla. Notas: Ojo con la polaridad, ver el esquema, pone bien claro que A1 corresponde con el + y A2 con el Ground. Instalación típica: Muchos usuarios de este PA lo que solemos hacer para alimentar el PA es usar dos cables de alimentación desde el sensor de corriente: Cuando se prepara las soldaduras para el sensor de corriente ( el cable rojo y cable negro) que iran soldado a un conector XT60 o un conector Deam y por el otro lado a la pista correspondiente de + O – del sensor de corriente, aprovechamos para soldar también un cable fino rojo y un cable fino negro, en el extremo de este cable le pondremos un conector futaba para enchufarlo al puerto A1 /A2 del PA. De esa manera ya tenemos los 12v de alimentación necesarios. OJO: Si se usan lipos de más de 3s, es necesario intercalar un ubec: Hay gente que incluye en esta configuración un filtro para hacer que la corriente llegue al PA de la forma más limpia posible. Yo no lo uso. En la última parte de este apartado os paso un esquema completo de cómo he realizado mi conexión. B) CH1~CH6 Input Recordando donde está ubicado, en la vista general del puerto de conexiones: SEÑALES +12 V GROUND Aquí es donde vamos a conectar los CH del RX del mando. Tal y como se muestra en la figura, los pines blancos ( verde en el dibujo de arriba) corresponden con las señales, los pines rojos corresponden con los pines de alimentación del Rx (12v) estos pines rojos están internamente conectados dentro del PA. Por último los pines negros son las tierras o ground que también están internamente conectadas dentro del PA. El PA no alimenta estos pines ni tampoco se alimenta de cualquier fuente que conectemos a ellos. Según esto los cables a conectar entre el puerto B y el Rx serian como se muestran en la siguiente tabla: El PA necesita un interruptor de dos posiciones y otro de 3 posiciones para cambiar los modos de vuelo. Por favor conectar estos al CH5 y el CH6 según la tabla anterior. El Pa necesita estos canales de entrada para acceder a las diferentes funciones. Especialmente es necesario asegurarse de que los 6 canales están conectaos aunque no se use el timón de cola CH4 en alas de combate. Se repite el código de colores y pines con cada uno de los puertos del PA al Rx. CH1= Alerones CH2= Profundidad CH3= Gas CH4= Dirección o timón de cola CH5= A CH5 del RX, después en la emisora, programar Auxiliar 1= Tecla de dos posiciones CH6= A CH6 del RX, después programar en la emisora Auxiliar 2= Tecla de tres posiciones En todos los casos hay que respetar las posiciones de los pines, blanco por arriba a señal del Rx, Rojo por el medio a 12v de Rx Negro por abajo a ground del Rx Blanco por arriba Señales. Utilización de receptores con PPM (Posicionamiento por Modulación de Pulsos) El PA soporta señales de entrada PPM. Si nuestro RX de mando dispone de salidas PPM, solo vamos a necesitar un único cable para implementar las señales de mando (Alerones, profundidad, gas y dirección), con lo que se simplifica menormente la instalación. A- Para emisoras Futaba o receptores similares, la definición de canales par PPM para los canales del 1 al 4 serian: Alerones, profundidad, Gas, y dirección. En este caso conectar el cable de señales PPM al canal CH5 del PA. B- Para emisoras JR o similares la definición de los acanales 1 al 4 serian Gas, alerones, profundidad y dirección. En este caso conectar el cable de señales ppm de nuestro RX al canal CH6 del PA. En el momento que una señal PPM sea reconocida en los canales CH5 o CH6 del PA los canales de entrada CH1a CH4 serán automáticamente usados como canales auxiliares de salidas a servos. El PA no acepta señales PWM hasta que sea alimentado de nuevo. Vamos a tratar de explicar esto de una manera mas sencilla, creo que esta parte del manual está mal explicada o puede llamar a la confusión. Primero, la definición de salidas CH1= Alerones, CH2=profundidad, CH3= Gas, CH4= Dirección, no es propio de Futaba ni de ninguna otra marca comercial de tx-rx mando. Esa definición de canales define lo que se llama en aeromodelismo el MODO DE VUELO 2. La segunda configuración que el manual Llama JR, CH1=Gas, CH2=Alerones, CH3=Profundidad, CH4= Dirección, tampoco es propia de la marcas comerciales JR ni ninguna otra marca. Esa configuración es la que en aeromodelismo se llama MODO DE VUELO 1, es decir gas a la derecha. Esto desde mi punto de vista es un error del manual. Los modos de vuelos , la forma donde nos guste poner el gas , los alerones la profundidad y la dirección la elegimos nosotros y la configuramos en nuestras emisoras. Lo que si hay que tener claro es que si conectamos el cable PPM al CH5 del PA forzosamente vamos a estar volando en Modo1 y si lo conectamos al CH6 estaríamos forzosamente en modo de vuelo 2 “Gas a la derecha”. Luego, donde conectemos nuestro cable de PPM va a depender no de si nuestra emisora es futaba o JR sino de en qué modo volemos normalmente. En mi caso, uso el sistema Dragonlink, cuyo RX dispone del CH12 como salida PPM: CH12 PPM CH12 PPM, SIGUIENDO EL CODIGO DE COLORES DE MI RX ( GROUND ABAJO, VCC EN MEDIO Y SEÑALES ARRIBA) LLEVO EL CABLE AL CH5 DEL PA SIGUIENDO EL CODIGO DE COLORES DE ENTRADA AL PA SEÑAL ARRIBA, VCC ROJO EN MEDIO Y GRD NEGRO ABAJO Usando esta configuración elimino de golpe y porrazo 4 cables que irían desde los CH1, CH2,CH3 Y CH4 del RX al los canales CH1, CH2,CH3 Y CH4 de entradas del PA, con único cable ya tengo implementado todas las entradas de mando al PA ahorrando peso y espacio. Como yo vuelo en modo 2, es decir con el mando del gas en el stick izquierdo, mi configuración es un solo cable del CH12 de mi RX ( que es el canal del RX con salida PPM) al CH5 del PA. C) CH1~CH4 Output ( Canales de salida a servos) o modulo de salidas Conectar los servos a estos 4 puertos de salida del PA, de esta forma el PA tiene control de las superficies de mando. La configuración de colores es idéntica al modulo de entradas: Blanco: arriba: SEÑALES Rojo: En medio: Alimentación VCC Negro: Abajo: Masas o Ground Los Pines rojos están internamente conectados con los pines rojos de las entradas del PuertoB (CH1 A CH6 puerto de entradas) NOTA IMPORTANTE: Estos canales de salida, no alimentan dan alimentación a los servos ni al RX. Se necesita conectar un UBEC con salida de 5 a 6V. Os pongo a continuación como es mi conexión: Y ahora os amplio como saco alimentación de 12v para el OSD y alimentación de 6v para servos: De la LIPO 3S vamos al Sensor de corriente a la salida del sensor de corriente sacos dos cables rojos y dos cables negro. Un cable rojo + uno negro van al ESC dando alimentación de 12V . El otro cable Rojo y cable negro van a un conector en Y, donde: 1- Una de las ramas de la Y salen cable rojo y negro para dar 12V de alimentación al PA en el modulo de entrada de alimentación al PA 2- La otra rama de la Y va a la entrada de un UBEC, al Ubec le entran 12V y saca 5V que conecto al CH1 del modulo de entradas del PA. Como todos los pines Rojos están internamente conectados ahora si dispongo de alimentación de 5v para alimentar servos en el modulo de salida. Siguiendo el esquema mio de conexiones, se puede ver que uso un ESC con UBEC. La conexión del ESC al CH3 DEL MODULO DE SALIDAS SOLO SE LLEVA EL CABLE DE SEÑAL. Se han dado casos de problemas de malfuncionamiento si se conectan los tres cables del UBEC del ESC al PA. Se recomienda solo conectar el cable de señal al CH3 de salidas del PA. 12V X 12V 3s LIPO 5V Cable Y CURRENT UBEC SENSOR 12V ESC SOLO EL CABLE DE SEÑAL DEL ESC MOTOR Rx CH PPM D) GPS Conexión del modulo GPS. No tiene dificultad alguna, únicamente identificar cual es el puerto de conexión y seguir el código de colores: Donde: Este mismo puerto o bahía de conexiones es el que se utiliza para conectar el útil de actualización del PA. E) DATOS: Este puerto o bahía de conexiones es el que se utiliza para obtener los datos de telemetría, modulo bluetooth , cable USB y demás. Se necesita este puerto si se desea cargar puntos de waypoint desde la estación de tierra. F) CAMARA: Conecta tu cámara a este puerto, usar el pin de alimentación de corriente F2, solo si tu cámara puede trabajar a la misma tensión de alimentación que el PA, a menudo 12V. Si por ejemplo tu cámara necesita 12v de tensión de alimentación y usas lipos 3S para alimentar el PA, simplemente conecta los tres cables de la cámara a este puerto. Si usas cámara de 5v, necesitaras buscar otra fuente de alimentación a 5v para alimentar la cámara y no usar el pin F2. Ojo, esto es importante, para quienes usen cámaras de 5v NO CONECTAR EL CABLE DE ALIMENTACION AL PIN F2 DE ESTE PUERTO, QUEMAS LA CAMARA!! G) AV-TX (Tx de video) Puerto de conexión del TX de video. De igual forma que el puerto F de conexión de la cámara, si tu TX de video utiliza una tensión de alimentación diferente a la que se usa para alimentar el PA, se necesitaría alimentar el TX de una forma independiente Y NO USAR EL PIN G2. H) AUXILIAR Este puerto se usa para conectar dispositivos auxiliares. Los dispositivos auxiliares pueden ser sensores ultrasónicos o de otro tipo. A menudo se conecta en este puerto el sensor de velocidad. Dejar el puerto libre si no se van a usar dispositivos auxiliares. I) SENSORES Estos pines se usan para conectar el sensor de corriente y la entrada RSSI. Conectar el sensor de corriente que acompaña al PA directamente en este puerto.El sensor de corriente tiene un conector de 4 pines. Asegurarse que al conectar el cable negro del sensor de corriente se conecta con el pin L5 (Ground pin). ATENCION: Soldar e el cable ground directamente al conector, no a la pista del sensor de corriente, tal y como se muestra en las figuras siguientes: OK MAL El motivo, es que al parecer, la pista del sensor de corriente no soporta corrientes de más de 20A y asi soldado se acabaría por quemar la pista y el sensor de corriente. Despues de conectar el sensor de corriente en pin L1 para el RRSI sigue libre. Conectar la señal RRSI desde el puerto RRSI de tu RX a este pin L1. La señal RRSI se gestiona internamente por el PA por lo que no es necesario ningún circuito externo para la gestión de la señal RSSI. En mi caso, uso el CH13 del dragonlink para implementar la gestión del RRSI. De los tres pines que componen mi CH13 de RSSI solo saco un único cable ( el de señal del RX) que llevo a este pin L1. Posteriormente, será necesario hacer la programación del O y el SPAN del nivel de señal de RSSI, se explicará en el modulo de programación del PA. J) EXT Se usa este puerto IC2 para conectar otro tipo de dispositivos. El manual no aclara nada de qué tipo de dispositivos se conectarían en este puerto, no puedo aclarar nada mas al no disponer de más información por parte del fabricante.