PRACTICA 5: SISTEMA DE CONTROL DE VELOCIDAD. PRECISIÓN.
Anuncio

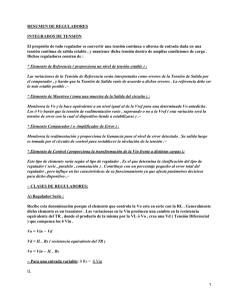
PRACTICA 5: SISTEMA DE CONTROL DE VELOCIDAD. PRECISIÓN. Asignatura: Sistemas Lineales. 1º de Ingeniería en Automática y Electrónica ESIDE. Departamento de Automática y Electrónica Curso 2006-2007 Práctica nº 5: Sistema de Control de Velocidad. Precisión. 1. Sistema de Control de Velocidad. Precisión. 1.1. Objetivos. Familiarizarse con la configuración de un lazo de control de velocidad. Analizar el efecto de la variación de la ganancia sobre la respuesta transitoria y estacionaria. Asimilar los efectos de las acciones de control I y PI sobre la respuesta transitoria y la estacionaria. Relacionar los resultados teóricos con los experimentales. 1.2. Conocimientos Previos. Expresión de la respuesta y de la señal de error de un sistema de 2º orden con o sin cero adicional ante un escalón de posición y una rampa. La configuración y las características de los elementos de la maqueta MV-541 (ver prácticas de Instrumentación). 1.3. Configuración del lazo de control de velocidad de la maqueta MV-541. Generador de Consigna CORRECTOR GC (s ) VREF + KM 1 + TM ⋅ s ωM 1 s θ0 PROCESO KG KT ACONDICIONADOR TACODINAMO H(s) Figura 1: Configuración del lazo de control de velocidad. ESIDE. Laboratorio de Sistemas de Medida y Regulación página 2 de 8 Práctica nº 5: Sistema de Control de Velocidad. Precisión. Características: Tacodinamo: KG = 7mV 7 × 60 mV = ⋅ rpm 2π rad / seg Motor: ω NOMINAL = 1200rpm = 1200 × 2π rad / seg 60 Acondicionador: 0 ≤ KT ≤ 1 2. Experimentos. Los experimentos que se van a desarrollar a lo largo de la práctica son los que se citan a continuación: 2.1. Experimento 1. Sistema de Regulación de Velocidad. Análisis de la respuesta estacionaria. 2.1.1. Entrada escalón de posición. - Fijar VREF = 5 voltios, KC = KT = 1, registrar la señal de salida de la tacodinamo (señal de realimentación) y la señal de error (señal de entrada al driver). Comprobar que el error estacionario es no nulo. - Variar VREF y constatar que el error estacionario depende de la amplitud de la señal de referencia; es decir, decrece y aumenta respectivamente en función de VREF. - Variar KT entre 1 y 0 y observar el efecto del acondicionador sobre la señal de error. Se mantendrá KC = 1. ESIDE. Laboratorio de Sistemas de Medida y Regulación página 3 de 8 Práctica nº 5: Sistema de Control de Velocidad. Precisión. 2.1.2. Entrada rampa. Comprobar que al tratarse de un sistema de tipo cero, la salida se desvía progresivamente de la señal de referencia. Analizar el efecto del cambio de la pendiente de la rampa de entrada. - Fijar KC = KT = 1 y VREF = 5 voltios; variar el tiempo de subida T. VREF (t ) = - 5 A ⋅t = ⋅t T T Testear si KT tiene algún efecto sobre la señal de error. Se registrará la señal de error y la señal realimentada. 2.1.3. Señal de control. Repetir el apartado 2.1.1 para valores de KC entre 1 y 10, seleccionando los valores 5 y 10. - Fijar VREF = 5 voltios y KT = 1. Registrar la señal de control u(t) (salida del corrector) y la señal de error. Para observar ésta última, se utilizará un comparador externo (módulo ELWE) para restar la señal realimentada a la referencia VREF. - Testear el efecto de KT. 2.2. Experimento 2. Sistema de tipo 1. Análisis de la respuesta estacionaria. El integrador lo introduce el controlador I (acción integral pura). 2.2.1. Entrada escalón. - Entrada escalón de posición de amplitud VREF = 5 voltios. Fijar KT = 1 y K/T = 1. - Registrar: a) Señal de realimentación y la consigna. b) Señal de consigna y señal de error. c) Señal de realimentación y señal de control (salida corrector). - Analizar el efecto de variar K/T (ajuste de acción I) sobre la respuesta transitoria y la estacionaria repitiendo los apartados anteriores. ESIDE. Laboratorio de Sistemas de Medida y Regulación página 4 de 8 Práctica nº 5: Sistema de Control de Velocidad. Precisión. 2.2.2. Entrada rampa. Entrada rampa: VREF (t ) = - 5 ⋅t T Repetir las pruebas anteriores. 2.3. Experimento 3. Análisis de los efectos de la acción PI. GC ( s ) = K ⋅ (1 + 1 ) Ts Entrada escalón VREF = 5 voltios. G ( s ) = GC ( s )G ( s ) = K ⋅ K M (1 + TI s ) s ⋅ (1 + TM s ) Respecto al sistema utilizado en el experimento 2, se ha introducido también un cero. H ( s ) = KT K G - Fijar K=1 y variar 1/T seleccionando tres valores tales que 1/T3 > 1/T2 > 1/T1 Realizar las pruebas a), b) y c) del experimento 2. - Fijar K = 5 y realizar las pruebas anteriores utilizando los mismos valores 1/T (1/T3 > 1/T2 > 1/T1). 2.3.1. Trabajo. T1. Comparar los resultados de las pruebas realizadas con K = 1 con las obtenidas en el experimento 2 habiendo fijado K/T = 1. Analizar el efecto del cero (1+TIs) sobre la respuesta transitoria. T2. Deducir las expresiones teóricas de ω(t), e(t) y u(t) del lazo de control configurado en el experimento 3. T3. Modelizar un motor de continua controlado por el campo y/o por armadura (ver Benjamin Kuo) ESIDE. Laboratorio de Sistemas de Medida y Regulación página 5 de 8 Práctica nº 5: Sistema de Control de Velocidad. Precisión. 3. ANEXO TEÓRICO. 3.1. Experimento 1. Sistema de tipo cero. Función de Transferencia en lazo cerrado: KC K M KC ⋅ K M TM M (s) = = 1 + K C K M K G KT + TM s s + 1 + K C K M K G KT TM Respuesta a un escalón de amplitud VREF: W ( s ) = VREF ⎛ ⎜ 1 1 KC K M ⋅ ⋅⎜ − 1 + K C K M K G KT ⎜ s s + 1 + K C K M K G KT ⎜ TM ⎝ ω (t ) = A ⋅ VREF (1 − e −t A= KC K M 1 + K C K M K G KT τ= TM 1 + K C K M K G KT τ ⎞ ⎟ ⎟ ⎟ ⎟ ⎠ ) Error de Control: s+ 1 1 + TM s 1 1 TM = = = W (s) = 1 K K K K 1 + G ( s ) H ( s ) 1 + C M G T 1 + K G K M K G KT + TM s s+ τ 1 + TM s ⎛ − 1 ⎞⎟ τ E ( s) = ⎜ + ⎟ ⋅ VREF TM ⎜ s s + 1 ⎟ τ ⎠ ⎝ τ ⎜1 τ ⎡ ⎛T ⎞ −t ⎤ 1 + ⎜ M − 1⎟ ⋅ e τ ⎥ ⋅ VREF ⎢ TM ⎣ ⎝ τ ⎠ ⎦ VREF τ = VREF = = VREF − KT K G (ω M )SS TM 1 + K C K M K G KT e(t ) = eSS TM ESIDE. Laboratorio de Sistemas de Medida y Regulación página 6 de 8 Práctica nº 5: Sistema de Control de Velocidad. Precisión. 3.2. Experimento 2. Sistema de tipo uno. K1 T s KM G ( s) = 1 + TM s GC ( s ) = H ( s ) = KT K G Función de Transferencia en lazo cerrado: M (s) = = ( T) = 1 KM ⎛ K ⎞ = ⎜ ⎟ 1 K M K G KT ⎛ K ⎞ TM ⎝ T ⎠ s + s+ ⎜ ⎟ TM TM ⎝T ⎠ 1 ω n2 KT K G s 2 + 2ξω n s + ω n2 K M K G KT TM ωn = ξ= K KM 2 T TM s + s + K M K G KT K 1 2 ⎛K⎞ ⎜ ⎟ ⎝T ⎠ 1 ⎛K⎞ K M K G KT TM ⎜ ⎟ ⎝T ⎠ Función de transferencia de error: W (s) = = 1 ⎛K⎞ K M K G KT ⎜ ⎟ ⎝T ⎠ 1+ s (1 + TM s ) 1 = s(1 + TM s) ( T) TM s + s + K M K G KT K 2 = 1 TM s (1 + TM s ) 1 K K K s + s+ M G T TM TM ⎛K⎞ ⎜ ⎟ ⎝T ⎠ = ω n2 ⋅ s(1 + TM s) ⎛ K ⎞ s 2 + 2ξω n s + ω n2 K M KT K G ⎜ ⎟ ⎝T ⎠ ESIDE. Laboratorio de Sistemas de Medida y Regulación página 7 de 8 Práctica nº 5: Sistema de Control de Velocidad. Precisión. Función de transferencia de control: U (s) GC ( s) U ( s) E (s) = = = VREF ( s ) 1 + GC ( s )G ( s ) H ( s ) E ( s) VREF L( s) = = 1 (1 + TM s) 2 K M KT K G s + 2ξω n s + ω n2 (Sistema con un cero adicional) Para una entrada en escalón de amplitud VREF = 1 voltio Respuesta de un sistema básico de 2º orden: 1 KT K G ω (t ) = ⎡ e −ω D t ⋅cot gϑ ⎤ ⋅ sen (ω Dt + θ )⎥ ⎢1 − sen θ ⎣ ⎦ Respuesta a un impulso de un sistema de segundo orden con un cero adicional: e(t ) = ω M e −ω t ⋅cot gθ sen(ω Dt + θ Z ) B sen(θ + θ Z ) D eSS = 0 e(0) = B= ωN sen θ Z ω2T = N M = 1; B sen(θ + θ Z ) B 1 ⎛K⎞ K M KT K G ⎜ ⎟ ⎝T ⎠ Respuesta a un escalón de un sistema de segundo orden con un cero adicional: u (t ) = 1 K M KT K G ⎡ ⎤ e −ω D t ⋅cot gϑ 1 − ⋅ sen (ω Dt + θ + θ Z )⎥ ⎢ ⎣ sen(θ + θ Z ) ⎦ ESIDE. Laboratorio de Sistemas de Medida y Regulación página 8 de 8