Membranas activas: motores rotatorios
Anuncio

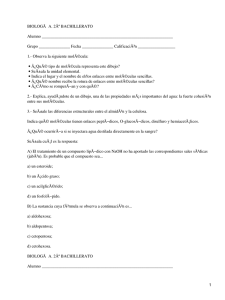
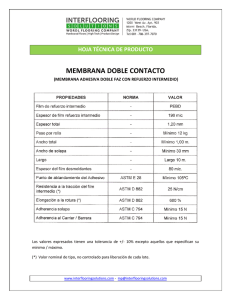
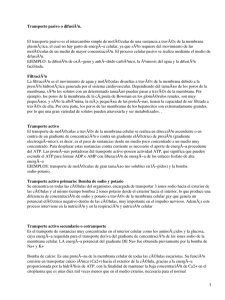
Membranas activas: motores rotatorios Isaac Llopis 6 de septiembre de 2005 Resumen En este trabajo hacemos un estudio de la estructura y funcionalidad de las membranas ası́ como la necesidad de considerar el hecho que estas membranas se encuentran fuera del equilibrio termodinámico. Nos centramos en el papel de los centros activos, en concreto de los que actúan como motores rotatorios, como es el caso de la ATP-asa. A través del método de simulación de lattice-Boltzmann estudiamos el campo hidrodinámico que generan dichos rotores y analizamos su comportamiento colectivo. Índice 1. Introducción: Membranas y motores rotatorios 1.1. Estructura y funcionalidad de la membrana . . . 1.1.1. Estructura . . . . . . . . . . . . . . . . . 1.1.2. Funcionalidad . . . . . . . . . . . . . . . . 1.2. Fluidez de la membrana . . . . . . . . . . . . . . 1.3. Procesos de transporte . . . . . . . . . . . . . . . 1.3.1. La hidrólisis del ATP . . . . . . . . . . . 1.4. Membranas activas . . . . . . . . . . . . . . . . . 1.4.1. Bacteriorhodopsin . . . . . . . . . . . . . 1.5. Ejemplos de motores rotatorios (rotores) . . . . . 1.5.1. La ATP-asa . . . . . . . . . . . . . . . . . 1.5.2. Los cilios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 2 2 5 5 6 6 8 9 10 11 13 2. Un modelo de motores rotatorios 2.1. Modelo teórico . . . . . . . . . . 2.2. Método de simulación . . . . . . 2.2.1. Lattice gas (LG) . . . . . 2.2.2. Lattice-Boltzmann . . . . 2.3. Dinámica de partı́culas en LB . . 2.4. Motores rotatorios en LB . . . . 2.4.1. Partı́culas activas . . . . . 2.4.2. Mecanismo de rotación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14 14 15 15 16 17 19 19 20 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1. Introducción: Membranas y motores rotatorios 2 3. Resultados 20 3.1. Análisis de 1 rotor . . . . . . . . . . . . . . . . . . . . . . . . . . 21 3.1.1. Campo hidrodinámico inducido por los rotores . . . . . . 22 3.2. Estudio de 2 rotores . . . . . . . . . . . . . . . . . . . . . . . . . 25 3.3. Cadena de rotores . . . . . . . . . . . . . . . . . . . . . . . . . . 28 3.4. Comportamiento colectivo: . . . . . . . . . . . . . . . . . . . . . 29 3.4.1. Movimiento inducido . . . . . . . . . . . . . . . . . . . . . 29 3.4.2. Distribución de velocidades . . . . . . . . . . . . . . . . . 29 3.4.3. Tiempos largos . . . . . . . . . . . . . . . . . . . . . . . . 32 3.5. Cristal de Wigner triangular . . . . . . . . . . . . . . . . . . . . . 33 3.5.1. Difusión activa . . . . . . . . . . . . . . . . . . . . . . . . 36 3.6. Fluctuaciones: acoplamiento entre los rotores y las fluctuaciones de la membrana . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37 4. Conclusiones 1. 1.1. 37 Introducción: Membranas y motores rotatorios Estructura y funcionalidad de la membrana El término membrana biológica uno tiende a relacionarlo con la membrana plasmática de la célula, que separa el citoplasma celular del exterior. Aún ası́, en una célula eucariota no sólo existe esta membrana, sino que muchos de los orgánulos celulares (mitocondrios, retı́cula endoplasmático, aparato de Golgi, etc.) están delimitados por una membrana del mismo tipo. 1.1.1. Estructura Una membrana biológica es una fina capa ( 5 − 10 nm) compuesta por una mezcla compleja de moléculas lipı́dicas y proteicas, y también puede contener glúcidos (Fig. 1) y (Fig. 2). Estas moléculas se mantienen unidas fundamentalmente por interacciones no covalentes. Lı́pidos: Los lı́pidos son el componente principal de las membranas, concretamente la mitad de la masa de la membrana. Son moléculas amfipáticas, es decir, tienen un extremo hidrofóbico (no se asocia libremente con el agua) y el otro hidrofı́lico (sı́ se asocia libremente con el agua). Existen tres clases principales de moléculas lipı́dicas de membrana: 1. Fosfolı́pidos: lo son la mayorı́a de los lı́pidos de membrana. Ver en Fig. 3 su estructura detallada. Parte hidrofı́lica: un grupo fosfato esterificado y un grupo alcohol. 1. Introducción: Membranas y motores rotatorios Figura 1: Estructura de una membrana biológica Figura 2: Estructura tridimensional de una membrana biológica 3 1. Introducción: Membranas y motores rotatorios 4 Figura 3: Esquemas de una molécula de fosfolı́pido Parte hidrofóbica: dos cadenas de ácidos grasos, una saturada y otra insaturada, lo cual genera curvatura en la membrana. Son dos cadenas largas y voluminosas, y las interacciones entre ellas son fuertes, es por ello que se puede considerar que la parte hidrofóbica tiene geometrı́a cilı́ndrica. Debido a este comportamiento amfipático y a que sus colas son muy largas y voluminosas, los fosfolı́pidos en la membrana se disponen en una bicapa con sus colas hidrofóbicas dirigidas hacia el interior, quedando de esta manera entre las cabezas hidrofı́licas que delimitan la superficie externa e interna de la membrana [1]. 2. Colesterol: es un lı́pido esteroide, formado por una molécula de ciclopentanoperhidrofenantreno (o esterano). Las membranas plasmáticas de células eucariotas contienen gran cantidad de colesterol, cuya función es reforzar la permeabilidad de la bicapa. Se encuentra en el área hidrofóbica de la misma, su presencia contribuye a la estabilidad de la membrana ya que interacciona con las colas de la bicapa y disminuye su fluidez evitando que las colas se empaqueten, vuelvan más rı́gida la membrana. Las membranas de las células vegetales no contienen colesterol, tampoco las de la mayorı́a de las células bacterianas. 3. Glucolı́pidos: solamente en la monocapa externa. Se asocian entre ellos para formar microagregados. Son oligosacáridos unidos a los lı́pidos, aunque estos oligosacáridos también pueden unirse a las proteinas y formar glucoproteı́nas. La bicapa lipı́dica es una doble capa contı́nua de moléculas lipı́dicas en la que están inmersas varias proteı́nas de membrana. Esta bicapa es asimétrica, la 1. Introducción: Membranas y motores rotatorios 5 composición lipı́dica y proteica de la monocapa externa es diferente a la de la interna, lo que refleja las diferentes funciones de las dos caras de una membrana celular. Estas bicapas tienden a cerrarse sobre sı́ mismas hasta formar compartimientos herméticos, para minimizar el efecto de que colas hidrofóbicas tengan contacto con agua. Proteı́nas: Hay diferentes tipos de proteı́nas de membrana, cuyas funciones dependen de la manera en que éstas se asocian a la bicapa lipı́dica: Las proteı́nas transmembrana se extienden a través de la bicapa, y están diferenciadas en dominios hidrofı́licos e hidrofóbicos. Debido a esta estructura, pueden transportar moléculas a través de la membrana, tienden a ser canales de transporte. Las proteı́nas periféricas no se extienden en el dominio hidrofóbico, sólo actúan en una de las monocapas. Nosotros, en este trabajo, estamos interesados en las proteı́nas transmembrana. 1.1.2. Funcionalidad La función principal de una membrana es diferenciar el fluido interior del entorno. Aún ası́, las membranas también participan en otras funciones celulares, normalmente por el papel de las proteı́nas: Transporte de soluto via bombas o canales iónicos. De esta manera, podemos considerar una membrana como una barrera semipermeable, ya que mantiene la mayor parte de los productos producidos dentro de ella pero permite el paso de algunas moléculas. Locomoción y adhesión celular. Protección. Permitir el reconocimiento celular. 1.2. Fluidez de la membrana Los lı́pidos y muchas proteı́nas de membrana están en movimiento constante. Los lı́pidos se difunden en una de las monocapas con un coeficiente de difusión de 10−8 cm2 /s, que significa que un lı́pido da una vuelta a la membrana celular en aproximadamente 1s. Este movimiento lateral es rápido, sin embargo el movimiento de una molécula lipı́dica entre las dos capas de la membrana (flip-flop) es muy lento, debido al efecto hidrofóbico. La difusión de las proteı́nas es más lenta, un 1 − 10 % más pequeña que la de los lı́pidos. 1. Introducción: Membranas y motores rotatorios 6 La fluidez de una membrana aumenta con la temperatura. Los ácidos grasos pueden existir en un estado ordenado (gel) y en uno desordenado (lı́quido), cuya transición de fase se da a una cierta temperatura Tm , que depende de la longitud de las cadenas de los ácidos grasos y de su grado de insaturación. La fluidez también aumenta con la presencia de lı́pidos insaturados y de cadena corta. Esta fluidez implica que los componentes en su mayorı́a solo están unidos por uniones no covalentes. 1.3. Procesos de transporte La bicapa lipı́dica es básicamente impermeable a los iones, independientemente de su tamaño. Por eso el transporte de iones inorgánicos y de pequeñas moléculas orgánicas hidrosolubles a través de la bicapa lipı́dica es mediante proteı́nas transmembrana, de las que hay 2 tipos: 1. Proteı́nas transportadoras: se unen al soluto que va a ser transportado y hacen cambios conformacionales para que se transfiera dicho soluto a través de la membrana. 2. Proteı́nas de canal: forman poros hidrofı́licos que atraviesan la bicapa lipı́dica y, cuando los poros están abiertos, permiten que diferentes solutos pasen pasivamente a su través y atraviesen la membrana. El soluto tiene una carga neta, su transporte está influido tanto por su gradiente de concentración como por el gradiente eléctrico a través de la membrana. La combinación es el gradiente electroquı́mico. El gradiente electroquı́mico define 2 tipos básicos de transporte a través de la membrana: 1. Transporte pasivo: si el gradiente electroquı́mico es favorable (normalmente el potencial interior es más negativo que el exterior) se favorece el transporte de iones cargados del potencial positivo al negativo. 2. Transporte activo: algunas proteı́nas bombean activamente ciertos solutos en contra de su gradiente electroquı́mico, siempre mediante proteı́nas transportadoras. La acción de las bombas es crucial para mantener las diferencias de concentración iónicas. Una gran proporción de toda la energı́a que recibe el cuerpo humano es dedicada a las bombas iónicas. 1.3.1. La hidrólisis del ATP El ATP es un nucleótido trifosfato derivado de la adenina. a pH fisiológico tiene una carga negativa en cada grupo fosfato. Los grupos fosfato se unen 1. Introducción: Membranas y motores rotatorios 7 Figura 4: Estructura del ATP mediante enlaces fosfoanhidrilo. Si en lugar de tres tiene dos fosfatos es ADP y si tiene uno es AMP (Fig. 4). El ATP es la mayor fuente de energı́a quı́mica de las células. El transporte activo está acoplado a una fuente de energı́a metabólica como la hidrólisis del ATP, un gradiente de concentración iónica o un agente externo, donde el transporte mediante hidrólisis del ATP es el más tı́pico. Consiste en la siguiente reacción, considerando que el aceptor es el agua: AT P + H2 0 → ADP + Pi (∆G = −31kJ/mol) (1) Para que se produzca esta reacción, se requieren encimas que la catalicen, son las llamadas ATP-sintasas o ATP-asas. En la siguiente sección trataremos estas encimas con más detalle. Ejemplos: N a+ − K + − AT P asa: bombea N a+ de dentro a fuera de la célula y K + de fuera a dentro. Ca2+ − AT P asa: mantiene el gradiente de concentración de Ca2+ entre el interior y el exterior celular. 1. Introducción: Membranas y motores rotatorios 1.4. 8 Membranas activas Las membranas pasivas son membranas en equilibrio termodinámico, las fluctuaciones de su forma son el ruido térmico, que es el movimiento browniano de los elementos de la bicapa. Sin embargo, desde un punto de vista estadı́stico, una membrana biológica está muy lejos del equilibrio. Las membranas biológicas contienen proteı́nas (canales iónicos, bombas iónicas o proteı́nas fotoactivas) que consumen la energı́a quı́mica del ATP y la disipan en el medio, generan fuerzas que llevan a la membrana fuera del equilibrio. A la que las proteı́nas difunden alrededor de la membrana, las fluctuaciones resultantes en esta fuerza producen ruido no térmico para las fluctuaciones de forma de la membrana. Este hecho se debe introducir a la hora de describir una membrana. Ası́ pues, es básico para la descripción de una membrana suponerla activa. Las membranas que contienen centros activos sufren fluctuaciones de no equilibro adicionales a las de equilibrio debido a la actividad de estos centros activos. El teorema de fluctuación-disipación no es válido y debemos tener en cuenta las interacciones hidrodinámicas de largo alcance que están mediadas por el solvente. Debido a que no hay teorema de fluctuación-disipación hay una amplificación de las fluctuaciones, las fluctuaciones de no equilibrio son las dominantes [5]. Estos procesos de no equilibrio tienen efecto incluso en los glóbulos rojos, que tradicionalmente han sido explicados a partir de fluctuaciones de forma de equilibrio térmicas. Las proteı́nas activas de membrana pueden ser modelizadas como discos suspendidos en un fluido bidimensional viscoso rodeado de fluido de viscosidad baja [2]. Para determinar el efecto de las interacciones hidrodinámicas en la difusividad de las proteı́nas en suspensiones no diluı́das, solucionamos numéricamente la ecuación de Navier-Stokes para un sistema de discos en un fluido bidimensional usando una expansión multipolar [3]. Consideramos las proteı́nas móviles, aunque también pueden haber algunas fijas. Para estas proteı́nas móviles, podemos calcular autodifusiones a tiempos cortos tanto translacionales como rotacionales y el gradiente difusivo crece logarı́tmicamente con el nombre de discos, que es la paradoja de Stokes. El modelo del mosaico fluido (fluid mosaic model ) [4] postula que la membrana es como un mosaico fluido en el que la bicapa lipı́dica es una red donde se sitúan las proteinas, que interaccionan unas con otras y con los lı́pidos. Tanto las proteinas como los lı́pidos pueden desplazarse lateralmente. Por lo tanto, podemos considerar la membrana como proteı́nas suspendidas en un fluido (la bicapa lipı́dica) que está en movimiento constante. Las proteı́nas también se mueven lateralmente en la bicapa, formando diferentes estructuras, que irán cambiando con el tiempo. 1. Introducción: Membranas y motores rotatorios 9 Figura 5: Estructura de la Bacteriorhodopsin. Pero la situación real es que las proteı́nas asociadas con la superficie de la membrana tienen que competir con varios obstáculos a la que experimentan el movimiento Browniano. Usando microscopia de fuerzas atómicas (AFM) en rotores suspendidos en una membrana lipı́dica, D.J. Müller et al. [6] mostraron, analizando las trayectorias individuales, que las proteı́nas podı́an moverse según difusión libre o difusión entorpecida, que tienen coeficientes de difusión considerablemente diferentes. Lo hacı́an en función de la distribución de rotores a su alrededor. El análisis con AFM mostraba que algunos rotores formaban clusters densos (difusión entorpecida) y otros, en cambio, no tenı́an contacto con otros rotores (difusión libre). Las trayectorias observadas sugieren que las proteı́nas de membrana experimentan transiciones entre estos dos tipos de movimiento. El citoesqueleto, justo debajo de la membrana juega un papel fundamental en el control de la mobilidad de las proteı́nas de membrana en una gran variedad de células, como es el caso de las nerviosas, las epiteliales o los glóbulos rojos. 1.4.1. Bacteriorhodopsin La Bacteriorhodopsin (bR) es una proteı́na fotoactiva de la que se conoce su estructura a nivel atómico y con gran resolución (Fig. 5), de hecho es la bomba de iones mejor entendida [7] [8]. Cuando se ilumina con luz verde amarillenta se 1. Introducción: Membranas y motores rotatorios 10 activa el bombeo de protones a través de un fotociclo de unos 5ms. Su peculiaridad es que utiliza directamente la energı́a que proviene de la luz exterior en vez de requerir la hidrólisis de ATP o GTP para bombear iones. Cuando es iluminada con luz amarillenta-verdosa se activa el bombeo de protones a través de un fotociclo de τ ∼ 5ms. Se han estudiado los cambios estructurales de la bR durante el fotociclo para ası́ saber la trayectoria de cada protón a través de la proteı́na. Experimentos con micropipetas en el estudio de vesı́culas gigantes fluctuantes que contienen BR en la bicapa, mostraron que la actividad de bombeo de iones inducı́a una amplificación en las fluctuaciones de la forma de la membrana, lo cual se puede interpretar como un incremento de la temperatura efectiva de la membrana [9]. Con la técnica de micropipetas se puede cuantificar el área acaparada en las fluctuaciones de membrana. De hecho, la variación de este exceso de área (∆α) se puede relacionar con la tensión superficial (σ) de la membrana [9]: ∆α = σ KB T ln 8πκ σ0 (2) donde κ es la rigidez de la membrana y σ0 la tensión superficial de equilibrio. En el caso de membranas pasivas T es la temperatura, pero en membranas activas T es la temperatura efectiva, ya que estamos fuera del equilibrio. La pendiente de la recta determina el valor de la rigidez de la membrana. Se observó que cuando se emitı́a luz sobre estas vesı́culas gigantes y se variaba la frecuencia de la luz emitida desde luz roja hasta luz amarillenta-verdosa, la pendiente de la recta, y en consecuencia, la rigidez disminuı́a. Esto indica que el exceso de área es mayor cuando se ilumina con luz amarillenta-verdosa, es decir, la actividad de la bR induce una amplificación de las fluctuaciones de la membrana. De esta sección concluı́mos que los centros activos cambian considerablemente el estado de una membrana. Este experimento es muy claro, pues simplemente variando la frecuencia de la luz emitida sobre la membrana se observaban cambios importantes en el valor de la rigidez, lo que indicaba que los centros activos inducen una amplificación importante de las fluctuaciones. A partir de ahora, nos centraremos en otro tipo de proteı́nas, los motores rotatorios, pero motivados por el hecho que con la bR hemos visto experimentalmente un realzamiento de las flucutuaciones de membrana. 1.5. Ejemplos de motores rotatorios (rotores) J. Prost et al. [10], [11] estudian una membrana activa como un conjunto de motores rotatorios en una superfı́cie plana. Este estudio está motivado por sistemas biológicos en que procesos activos llevan a movimientos rotatorios en membranas y generan un flujo hidrodinámico. Vamos a describir 2 posibles ejemplos de motores rotatorios: la ATP-sintasa y los cilios. Ambos son posibles realizaciones de membranas activas ya que 1. Introducción: Membranas y motores rotatorios 11 están anclados en la membrana y cambian la dinámica del sistema debido a su movimiento. 1.5.1. La ATP-asa La ATP-asa es una encima universal que fabrica ATP a partir de ADP y fósfato, lo hace utilizando la energı́a del transporte de protones a través de la membrana. También se puede invertir ella misma e hidrolizar ATP para bombear protones en contra del gradiente electroquı́mico. Los ciclos de sı́ntesis e hidrólisis llevan a la ATP-asa a un movimiento de rotación [12] [13]. Cumple un papel importante en las células ya que proporciona la mayorı́a de la energı́a quı́mica que los organismos aeróbicos y fotosintéticos necesitan para mantenerse vivos. La ATP-asa es un complejo proteı́nico grande y asimétrico que está compuesto por distintas unidades. Básicamente, consiste en 2 multi-subunidades complejas distintas en estructura y función que están enlazadas. La porción hidrofóbica F0 está anclada en la membrana y realiza el transporte de protones a través de la membrana, mientras que la porción F1 reside en la periferia acuosa y cataliza la sı́ntesis/hidrólisis del ATP (Fig. 6). Juntas acoplan el flujo de protones bajo el gradiente electroquı́mico con la sı́ntesis del ATP [14]. F0 y F1 funcionan como un par de motores rotatorios enlazados por un rotor central y un estator (que es el circuito fijo dentro del cual gira el rotor) periférico. Un experimento que se hizo fue atar un filamento de actina fluorescente en un final de la subunidad C12 de F0 . A través de microscopı́a fluorescente, se vió que durante la hidrólisis del ATP el filamente experimentaba multiples rotaciones en el sentido contrario al de las agujas del reloj. La rotación de esta subunidad C12 ocurrı́a durante la sı́ntesis del ATP [15]. Esta subunidad, y por consiguiente este filamento, está rotando usando la energı́a de la hidrólisis del ATP. El torque producido por esta subunidad es de 40pN ·nm, que es bastante parecido al generado por la subunidad γ del motor F1 . Por lo tanto las subunidades γ y C12 rotan juntas durante la sı́ntesis y la hidrólisis del ATP. La dirección de los eventos quı́micos acoplados (ATP sı́ntesis e hidrólisis) y el transporte de protones (bajo o en contra del gradiente electroquı́mico) puede ser revertida si invertimos la dirección de la rotación de dicha subunidad [15]. Esta rotación acoplada es esencial para el acoplamiento energético entre el transporte de protones a través de F0 y la sı́ntesis e hidrólisis de ATP en F1 . Cuando los protones fluyen a través de F0 , se sintetiza ATP en F1 . Esto hace que la cola gire rápidamente, induciendo a la cabeza a fabricar ATP. El motor es reversible y un exceso de ATP provoca una rotación en la dirección opuesta y un flujo reverso de protones. Durante la catálisis un complejo formado por ciertas subunidades se mueve rotando en relación al resto de la encima. La ATP-asa es el motor rotatorio más pequeño nunca conocido (Fig. 7). Esta encima es la fuente principal de ATP en la mayorı́a de especies vivas de la tierra, incluidos los seres humanos. El cuerpo humano genera más de 100 kg 1. Introducción: Membranas y motores rotatorios Figura 6: Esquema sencillo de la ATP-asa. Figura 7: Diferentes perspectivas de la ATP-asa. 12 1. Introducción: Membranas y motores rotatorios 13 de ATP, que es secuencialmente usado para proveer de energı́a para diferentes reacciones bioquı́micas, incluyendo la sı́ntesi proteica y de DNA, la contracción de músculos, el tranporte de nutrientes y la actividad neuronal. En plantas y bacterias fotosintéticas es esencial para convertir la energı́a solar. Es una encima membranosa. Está situada en la membrana plasmática, en cloroplastos y en la membrana mitocondrial interna de células eucariotas. El flujo hidrodinámico generado por estos motores puede cambiar las propiedades de las membranas en las que están situados y puede realzar la difusión de proteı́nas de membrana. Un ejemplo de ellos es en los glóbulos rojos, ya que las fluctuaciones de la forma de los glóbulos rojos depende no sólo de la viscosidad del medio sino de las concentraciones de ATP. Las ATP-asas influencian a la hidrodinámica del sistema de 2 maneras: 1. Es un motor rotatorio que ejerce un torque dipolar. 2. Es una bomba de protones, la cual ejerce una fuerza cuadrupolar local. Estos dos mecanismos están desacoplados en el régimen lineal en el que nosotros estamos interesados. Estos motores rotatorios actúan como pequeños microvórtices e inducen un flujo en el fluido que rodea la membrana. Como estamos usando hidrodinámica lineal, el flujo inducido siempre será paralelo al plano medio de la membrana. Según [11] una fuerza cuadrupolar es la distribución de fuerza más sencilla que es consistente con el movimiento rotacional del motor y que cumple el requerimiento de no tener fuerzas externas presentes. En la siguiente sección presentaremos un modelo que simula estos objetos y nos centraremos en las consecuencias hidrodinámicas que podemos extraer. 1.5.2. Los cilios Los cilios son estructuras largas y delgadas (0,25µm) parecidas a los cabellos, ver Fig. 8. Estan formados por grupos especializados de microtúbulos (motores de los cilios) llamados cuerpos basales. Estos cilios se extienden desde la superficie de varios tipos de células eucariotas. Las células pueden autopropulsarse y generar un flujo gracias a los cilios, ya que éstos perturban el fluido que rodea la superficie y mueven la célula a través del fluido. El movimiento cı́clico de un cilio puede ser muy complicado, pero siempre exhibe un movimiento rotacional. Podemos decir que los cilios se comportan de manera efectiva como motores rotatorios. Una célula tiene normalmente centenares de cilios, que se mueven de una manera coordinada, con movimientos ondulatorios: ondas metacronales. Para describir este fenómeno es necesario tener en cuenta las interacciones hidrodinámicas entre cilios vecinos [16]. 2. Un modelo de motores rotatorios 14 Figura 8: Cilios respiratorios. 2. 2.1. Un modelo de motores rotatorios Modelo teórico El modelo teórico que vamos a seguir es el propuesto por J. Prost et al. [10], [11], en el que, como hemos dicho antes, estudian una membrana activa como un conjunto de motores rotatorios en una superfı́cie plana. En esta superficie, los rotores actúan como microvórtices que inducen un flujo en el fluido que los rodea. El hecho de no tener en cuenta la curvatura es sólo una aproximación de una membrana, pero el flujo inducido por los rotores es paralelo al plano medio de la membrana, ası́ que la aproximación de no tener en cuenta el bending no es tan mala. De hecho lo que estamos haciendo es ignorar el acoplamiento entre las bombas y la curvatura de la membrana. Además, no tenemos en cuenta que una membrana no es una superfı́cie, sino una bicapa. Estamos usando la representación de Monge, en la que nuestra membrana se puede describir como una superficie, los puntos de la cual vienen dados por la altura sobre el plano xy. Esta aproximación es útil en membranas casi planas y como para nosotros una membrana es plana, la representación de Monge es muy apropiada para nuestro estudio. Debemos recordar que estamos suponiendo la bicapa lipı́dica como una fluido superficial continuo de viscosidad cinemática ν (fluid mosaic model ), las 2. Un modelo de motores rotatorios 15 proteı́nas están suspendidas en este fluido. Es posible variar la concentración de proteı́nas en el fluido hasta más del 50 %, ya que es lo que podemos encontrar en membranas biológicas. 2.2. Método de simulación Para simular un fluido computacionalmente se pueden modelizar las moléculas individuales que forman dicho fluido (Dinámica Molecular). Si las interacciones entre ellas estan correctamente modelizadas, el sistema que estamos simulando se comportará como un fluido, estaremos resolviendo apropiadamente las ecuaciones de Navier-Stokes partiendo de un método puramente molecular. Sin embargo, la gran desventaja de este método es el tiempo computacional. En cada paso de tiempo se deben identificar las parejas que pueden colisionar en el siguiente paso de tiempo y se deben aplicar los campos externos. Además, cada paso de tiempo de dinámica molecular es aproximadamente t ∼ 10−13 s del tiempo real. Por lo tanto, se requiere mucho tiempo computacional para hacer variar la velocidad y la posición de cada partı́cula lo suficiente para tener una dinámica a tiempos largos. Incluso en el caso de gases, donde el paso de tiempo es más largo ya que el recorrido libre medio de cada molécula es mayor, el número de moléculas que se deben considerar es demasiado grande para poder simular el sistema eficientemente. 2.2.1. Lattice gas (LG) En los años 70 se desarrolló este método de computación, que es cualitativamente diferente de la dinámica molecular. En vez de considerar las moléculas individualmente, se consideran partı́culas de fluido, donde cada una de éstas es un grupo de moléculas (coarse-graining), que ocupan un cierto volumen, que es una fracción aún muy pequeña del volumen del sistema, es decir, estas partı́culas fluidas aún son muy pequeñas. Esto reduce drásticamente los datos que se necesitan computar. Este coarse-graining está justificado en el hecho que las propiedades macroscópicas no dependen directamente del comportamiento microscópico del fluido. El modelo impone que estas partı́culas de fluido estan obligadas a moverse en enlaces (links) de una red regular, y que este movimiento se da en pasos de tiempo discretos. Las leyes de conservación fı́sicas se incorporan en el momento del update de las posiciones y velocidades, y se aplican a cada paso de tiempo. Ver en Fig. 9 un caso sencillo de aplicación de este modelo. En un paso de tiempo dejamos que las partı́culas fluidas se propaguen y colisionen con otras. Sólo se pueden mover hacia nodos vecinos, es decir, sólo existe un conjunto finito de velocidades ~ci , donde i es el ı́ndice que va de 1 a Nv , siendo Nv el número de vecinos. Tenemos ni (~r, t) partı́culas situadas en el nodo ~r con velocidad ~ci . 2. Un modelo de motores rotatorios 16 Figura 9: Sistema muy pequeño, de 11 partı́culas en 15 nodos de fluido y 5 nodos de pared. Una simulación tı́pica usa 106 nodos y 2106 partı́culas. Otra ventaja de este modelo es que todas las colisiones entre partı́culas ocurren en el mismo tiempo, debido al hecho que los pasos de tiempos son discretos. Las reglas que gobiernan las colisiones son tales que el movimiento medio de las partı́culas sea consistente con la ecuación de Navier-Stokes. Los cálculos con LG requieren promedios para recuperar las ecuaciones macroscópicas. Con estos promedios a tiempos largos, esta técnica está restringida a flujos que varı́an lentamente [17]. 2.2.2. Lattice-Boltzmann LB usa distribuciones probabilı́sticas de partı́culas, en vez de partı́culas discretas, es aplicar el método de punto flotante sobre LG. Cada punto de la red es un elemento de fluido, y es representado por una función distribución de partı́culas. Es decir, reemplazamos las variables de red del Lattice gas ni (~r, t) por sus promedios en la colectividad fi (~r, t), donde fi (~r, t) =< ni (~r, t) >. Estas cantidades promediadas fi (~r, t) son ahora funciones reales en el rango 0 ≤ fi ≤ 1, donde la masa y el momento promedios están dados por X ρ(~r, t) = fi (~r, t) (3) i ρ(~r, t)~u(~r, t) = X i fi (~r, t)~ci (4) 2. Un modelo de motores rotatorios 17 La evolución (translación y colisión) de fi está dada por el promedio en la colectividad de la función de colisiones (ecuación de Boltzmann): fi (~r + ~ci , t + 1) − fi (~r, t) =< Ωi (n) > (5) El término de colisiones < Ωi (n) > puede aproximarse, según la expresión de tiempo de relajación: < Ωi (n) >= − fi − fieq τ (6) Donde 1/τ es un tiempo relaxacional y fieq es la distribución de equilibrio, tı́picamente la distribución de Maxwell-Boltzmann. Este término de colisiones tan sencillo es suficiente para reproducir la dinámica de la ecuación de Navier-Stokes. No tenemos en cuenta las fluctuaciones térmicas, nos queremos centrar en los efectos hidrodinámicos. El método lattice Boltzmann es una técnica computacional potente para modelizar muchas variedades de problemas sobre flujos de fluidos complejos, incluyendo diferentes fases y geometrı́as complejas. Es un método computacional discreto, basado en la ecuación de Boltzmann. Las simulaciones de este trabajo estan hechas con lattice-Boltzmann. 2.3. Dinámica de partı́culas en LB Queremos simular motores rotatorios suspendidos en un fluido, que está descrito por la red de nodos de lattice-Boltzmann. Para ello debemos modelizar partı́culas sólidas. Por simplicidad, a partir de ahora siempre trataremos con partı́culas esféricas (3d) o discos (2d), lo que llamaremos coloides. Podemos modelizar coloides suspendidos en dicho fluido como partı́culas sólidas y esféricas en las que se impone la condición de contorno de stick mediante las reglas de bounce-back, es decir, imponer que la velocidad del fluido alrededor de la partı́cula sea igual que la velocidad del centro de masas de la partı́cula. Estas partı́culas, a su vez, evolucionan siguiendo las reglas de la dinámica molecular, es decir, las ecuaciones de Newton. Por lo tanto estamos acoplando la hidrodinámica del solvente con este conjunto de partı́culas, como es habitual en suspensiones coloidales. Reglas de bounce-back: las partı́culas sólidas están definidas por una superficie, que corta algunos enlaces entre nodos de la red. Una partı́cula fluida moviéndose en uno de estos enlaces interactúa con la superficie en nodos fronteras situados a mitad de camino del enlace. Tenemos una descripción discreta de la superficie (Fig. 10). 2. Un modelo de motores rotatorios 18 Figura 10: Reglas de bounce-back Cada nodo frontera tiene 2 funciones distribución, que provienen de los 2 extremos del enlace. Al colisionar con la superficie se transfiere la densidad de probabilidad a través del nodo frontera, cambiando la densidad de momento local tal que tenga en cuenta la velocidad del cuerpo rı́gido, pero sin afectar la masa ni la presión. fi (~r + ~ci , t + 1) = fi∗ (~r + ~ci , t) + fi0 (~r, t + 1) = fi∗ (~r, t) − 2aci ρ~ub · ~ci c2s 2aci ρ~ub · ~ci c2s cs es la velocidad del sonido y el coeficiente aci del término ~ub ·~ci está determinado por el hecho que toda distribución consistente con la velocidad de nodo frontera ~ub es estacionaria respecto a las interacciones con los nodos frontera [18]. Por lo tanto, se cambia momento localmente entre el fluido y la partı́cula sólida, pero el momento total del sistema se conserva. El fluido llena todo el sistema, incluı́do el interior de las partı́culas, pero el fluido interior relaja rápidamente a la velocidad del cuerpo rı́gido. Además, debido a la dinámica, las partı́culas colisionan entre ellas. Cada 2. Un modelo de motores rotatorios 19 colisión debe cumplir la condición de conservar el momento total del sistema. 2.4. Motores rotatorios en LB Queremos modelizar un motor rotatorio, encontrar un mecanismo con el que podamos simular partı́culas que tengan una cierta velocidad angular propia, se autopropulsen angularmente. 2.4.1. Partı́culas activas Antes de modelizar un motor rotatorio observemos la modelización de un motor lineal, es decir una partı́cula activa autopropulsada, ya que el fundamento del mecanismo es el mismo. He desarrollado un mecanismo simple que lleva a la autopropulsión de un coloide [19]. Introducimos este mecanismo en vez de intentar simular un modelo de propulsión más realista. Tratamos esferas de radio R y seleccionamos una dirección de movimiento y un conjunto de nodos frontera alrededor de esta dirección, que seran los que cumplen la condición siguiente: ser vecinos de nodos interiores a la partı́cula y estar dentro de un cono de ángulo α, ver Fig. 11. En nuestras simulaciones siempre escogemos α = π, aunque también hemos comprobado que los resultados no dependen de α. La regla consiste en extraer una cierta cantidad de momento ∆~ p equitativamente distribuida en todos los nodos que cumplen la condición antes mencionada y esta misma cantidad de momento la añadimos al momento de la partı́cula. Esta partı́cula estará, mediante este mecanismo, autopropulsada. Además, este mecanismo no viola la conservación del momento lineal total. El campo de velocidades inducido por este mecanismo es dipolar. Alternativamente, podemos tambien seleccionar los nodos del fluido que sean frontera que sean interiores a un cono de ángulo ψ0 con respecto a π en la misma dirección que la dirección de movimiento seleccionada previamente. Ahora ∆~ p es extraido equitativamente de todos los nodos seleccionados y añadido al momento de la partı́cula, ver Fig. 11. De esta manera, la partı́cula se propulsa generando un campo de velocidades a su alrededor que será asimptóticamente cuadrupolar. Como estamos interesados en la autopropulsión de objetos que son pequeños, debemos escoger el parámetro ∆~ p de manera que el número de Reynolds (Re = uL/ν) sea lo suficientemente pequeño. Este modelo es muy simple y no tiene en cuenta la biologı́a de estos microorganismos, pero tiene en cuenta el acoplamiento hidrodinámico entre la suspensión de microorganismos y el solvente que los rodea, y recupera la adecuada interacción entre biocoloides activos. De esta manera podemos saber el papel de la hidrodinámica en suspensiones de objetos auto-propulsados. Estas partı́culas, partiendo del reposo, llegan a tener una velocidad estacionaria debido únicamente al mecanismo y al hecho que están sumergidas en un fluido viscoso. La velocidad asintótica viene dada por el balance entre la transferencia de momento y la fricción. En el caso tridimensional, es la siguiente: 3. Resultados 20 α 2δp δp δp Figura 11: Mecanismo introducido para simular partı́culas activas. ~u = ∆~ p 1 6πρηR 2 (7) No hay una fuerza neta aplicada sobre esta partı́cula, es por ello que la velocidad inducida por estas partı́culas activas es menor que en partı́culas pasivas bajo la acción de una fuerza externa aleatoria. 2.4.2. Mecanismo de rotación A partir del modelo de partı́culas activas construyo un modelo de transferencia de momento angular para tener un mecanismo de autopropulsión angular, que también conserve el momento lineal y angular total, ver Fig. 12. ~ = 2|δ~ Usando que L p|Rx̂, donde el eje x es perpendicular al plano de la hoja o la pantalla donde está inscrita, impongo que el sentido de rotación sea el contrario del de las agujas del reloj [20]. 3. Resultados A continuación presento los resultados obtenidos a partir de simulaciones mediante el método lattice-Boltzmann antes explicado. Primeramente me centraré en el campo de velocidades creado por un motor rotatorio. A continuación 3. Resultados 21 L δp α 2δp δp Figura 12: Mecanismo propuesto para simular partı́culas autorpropulsadas angularmente. analizaré el caso de 2 rotores y el de una cadena de rotores para comprobar si se corresponde con lo predicho por el modelo teórico. Finalmente me centraré en el caso de un conjunto N de rotores y en el análisis del comportamiento colectivo asociado. 3.1. Análisis de 1 rotor El mecanismo anteriormente presentado es suficiente para captar el hecho de que una partı́cula inicialmente en reposo empezará a rotar cada vez más rápido hasta alcanzar una velocidad angular constante estacionaria. Ver Fig. 13. Debido a su orı́gen hidrodinámico, la velocidad angular asintótica es alcanzada algebraicamente. Siendo d la dimensionalidad del sistema: ω(t) − ω∞ ∼ t−d/2 (8) Esta expresión es equivalente a la obtenida en [19] para las partı́culas activas. La escala de tiempo necesaria para alcanzar dicha velocidad angular está controlada por el tiempo en el que el flujo hidrodinámico se establece ya que el momento se ha difundido: τr ∼ R2 /ν, en el caso de una partı́cula suspendida en un fluido de viscosidad cinemática ν. 3. Resultados 22 1 ω/ω0 0.75 0.5 0.25 0 0 2 4 6 8 10 t/τr Figura 13: Velocidad angular de un rotor en función del tiempo, escalado por el tiempo de difusión del momento. En este caso τr = 2025 ya que R = 4,5 y ν = 0,01. El vector velocidad angular es negativo porque es en el sentido contrario de las agujas del reloj. Debido al balance entre la transmisión de momento, que en realidad genera momento angular, y a la fricción, esperamos una relación de la velocidad angular con los parámetros del sistema del mismo tipo que encontramos con partı́culas activas [19]: ω ~ = ∆~ p 1 6πρηR2 2 (9) He analizado, a partir de simulaciones, el mecanismo de propulsión básico y cómo depende la velocidad angular estacionaria de los parámetros relevantes del sistema: R, ν and ∆~ p. La dependencia en la viscosidad es la misma que en el caso de partı́culas activas: v ∼ 1/ν, ver Fig. 14. La dependencia en R es diferente, pero simplemente es porque ahora estamos calculando una velocidad angular en vez de una velocidad lineal, ahora ω ∼ 1/R2 , ver Fig. 15. El error en este gráfico a pequeños valores de R es debido a que en lattice Boltzmann la estimación que se hace del radio es mala para valores pequeños del radio. 3.1.1. Campo hidrodinámico inducido por los rotores Un motor rotatorio de radio R en una superfı́cie de viscosidad despreciable suspendido en un fluido newtoniano de viscosidad η para Re → 0 induce un campo de velocidades en el fluido que es solución de la ecuación de NavierStokes. 3. Resultados 8×10 23 -3 ω(ν) 4×10 R=2.5 R=3.5 R=4.5 R=5.5 R=6.5 R=7.5 -3 0 0 5 10 1/ν 15 20 Figura 14: Velocidad angular estacionaria del rotor en función de la viscosidad del fluido (ν). 8×10 6×10 -3 -3 ω(R) 4×10 2×10 ν=0.05 ν=0.1 ν=0.3 ν=0.5 ν=0.7 ν=1 -3 -3 0 0 0.05 0.1 1/R 0.15 0.2 2 Figura 15: Velocidad angular estacionaria del rotor en función del radio de la partı́cula (R). 3. Resultados 24 z y ω x Figura 16: Motor rotatorio en el plano yz, su vector velocidad angular es paralelo al eje x. ρ ∂~v ~v + ~v · ∇~ ∂t ~ + η∇ ~ 2~v = −∇p (10) Queremos saber el estado estacionario, por lo tanto no consideramos la derivada parcial temporal. Nuestro problema tiene simetrı́a rotacional (cilı́ndrica), ver Fig. 16: ω ~ = ωx̂, lo que significa que ~v = v(r)ϕ̂, donde ϕ es el ángulo polar del plano yz. Esta dependencia hace que el término convectivo (el término no-lineal) de Navier~ · ~v = 0. Stokes se anule y, además, que el flujo sea incompresible: ∇ Esta simetrı́a rotacional impone también que la presión sea constante, no hay nada en el sistema que pueda imponer gradientes de presión. Por lo tanto, la ecuación de Navier-Stokes (10) en esta situación es simplemente una ecuación de Laplace para la velocidad del rotor: ~ 2~v = ~0 ∇ (11) Al ser un fluido incompresible, podemos expresar ~v como el rotacional de otro vector. Teniendo en cuenta las condiciones de contorno (~v (r = R) = ω ~ ∧ ~r y v(r → ∞) = 0) obtenemos el campo de velocidades inducido por el rotor: ~v (~r) = R3 ω ~ ∧ ~r r3 (12) 3. Resultados Figura 17: Campo de velocidades originado por 1 rotor. t ∼ 0,5τr . 25 Figura 18: Campo de velocidades originado por 1 rotor. t ∼ 5τr . Una conclusión que podemos sacar de la última expresión es que el campo hidrodinámico es independiente de la viscosidad. En las Fig. 17 y 18 vemos la evolución del campo de velocidades creado por un rotor de radio R = 4,5 suspendido en un fluido de viscosidad ν = 0,01 a diferentes tiempos. En ellas vemos que el campo inducido es cuadrupolar, como predecı́a el modelo teórico [11]. En la Fig. 19 vemos el caso en el que hay 9 rotores de este tipo distribuidos al azar en el mismo fluido. 3.2. Estudio de 2 rotores Según el modelo teórico de Prost et al. [11], en el caso de 2 rotores, éstos simplemente rotan alrededor de su centro de masas y su interacción no tiene componente radial. Es necesario la presencia de rotores adicionales, que darán lugar a una interacción radial que, generalmente, es repulsiva. Para ver el efecto de las interacciones hidrodinámicas, estudiamos el sistema de dos rotores separados una distancia d y que giran con una cierta velocidad angular ω dentro de un fluido de viscosidad cinemática ν (Fig. 20). Las interacciones dependen inversamente de la distancia al cuadrado, por lo tanto la interacción con las imágenes será muy débil si el sistema es suficientemente grande y los rotores están suficientemente cerca. Es decir, imponemos que d L, donde L es el tamaño del sistema. Como hemos visto en la eq. 12, la velocidad lineal depende del producto 3. Resultados 26 Figura 19: Campo de velocidades del fluido originado por 9 rotores suspendidos en un fluido de ν = 0,01 a t ∼ 5τr . 3. Resultados 27 2R ω ω d Figura 20: Configuración inicial de la pareja de rotores. Figura 21: 2 partı́culas inicialmente separadas en el eje de las abcisas, se moverán siguiendo una órbita respecto al centro de masas de ambas partı́culas, en este caso coincide con el centro geométrico debido a que sus masas son iguales. 3. Resultados 28 vectorial de la velocidad angular con el vector que une el rotor con el punto que queremos evaluar. Debido a la anticommutatividad del producto vectorial dos partı́culas rotando en el mismo sentido y separadas una distancia d se moverán inicialmente en direcciones perpendiculares a su orientación relativa y cada una en un sentido diferente. Como la dirección relativa entre los motores variará debido al desplazamiento de cada uno de ellos, las direcciones de movimiento también cambiarán. De hecho, el movimiento que seguirán será el de órbitas elı́pticas alrededor del centro de masas del sistema de 2 partı́culas, como predice el modelo teórico, ver Fig. 21. Este sistema nos dice que cuando en una membrana tenemos a 2 rotores muy cercanos y los otros están muy alejados, ellos rotaran alrededor del centro de masas del sistema de 2 partı́culas, hasta que una tercera partı́cula perturbe esta configuración. Para un R y d fijados, vamos variando el parámetro ∆p y obtenemos una relación v = v(ω) (Fig. 22): 0.06 0.04 v(ω) 0.02 0 0 0.01 0.02 ω 0.03 0.04 0.05 Figura 22: Velocidad de 2 rotores en órbita alrededor del centro de masas del sistema de 2 partı́culas en función de la velocidad angular de ambas partı́culas. Se debe decir que este cálculo está hecho en 3d, la relación es parecida para 2d. 3.3. Cadena de rotores Imponemos una distribución inicial de rotores equiespaciados en una cadena unidimensional recta, rotando todos ellos en el mismo sentido (Fig. 23). La interacción hidrodinámica sobre el rotor i, debido a que decrece como 1/r2 , será básicamente la ejercida por los rotores i − 1 e i + 1. Debido a que las interacciones entre rotores dependen de ω ~ ∧~r, estas dos fuerzas se compensarán. 3. Resultados 29 De esta manera, una cadena de este tipo será estable. Lo hemos comprobado en nuestro modelo, donde las velocidades de cada rotor son muy pequeñas (∼ 10−7 ) y van oscilando alrededor de 0. De esta manera validamos la interacción entre partı́culas predicha por el modelo teórico. 3.4. 3.4.1. Comportamiento colectivo: Movimiento inducido Un rotor, por si mismo, no tendrá movimiento lateral (velocidad lineal), pero un rotor suspendido en un fluido con otros rotores sı́ se llegará a mover, y lo hará debido a las interacciones hidrodinámicas con los otros rotores. Es decir, la propulsión de cada partı́cula no es una cantidad propia sino que es debida al hecho que la partı́cula se encuentra dentro del campo hidrodinámico generado por otras partı́culas. Las interacciones entre partı́culas cambiarán la velocidad de cada una, queremos ver la dependencia de la velocidad con la fracción volúmica. Obviamente, el caso lı́mite de fracciones volúmicas pequeñas dará una velocidad nula. Esto no es ası́ en un conjunto de partı́culas autopropulsadas, debido a que allı́ la propulsión es propia, las interacciones solamente cambian las velocidades. Aquı́, además del cambio que originan, está el hecho de que una partı́cula no se moverá si no tiene otras partı́culas cerca. Es por esta razón que la velocidad de translación no es monótona decreciente como función de la fracción volúmica, la velocidad angular sı́ es decreciente (Fig. 24). Hacemos el análisis a tiempos cortos y a Re pequeño. La velocidad de translación tiene un máximo (Fig. 25) debido a la competición de los dos efectos: este máximo φ∗ ∼ 0,13 es una caracterı́stica del sistema y en principio es constante, no depende de la viscosidad ni de otros parámetros del sistema. 3.4.2. Distribución de velocidades Hacemos un análisis a tiempos cortos, que consiste en hacer la simulación sin dejar mover a las partı́culas aunque dejando evolucionar las velocidades. Es decir, es hacer el análisis cuando los rotores inducen un campo pero aún no ha pasado el suficiente tiempo como para que ellos se hayan movido debido al campo inducido por otros. Analizamos las distribuciones de velocidades de los rotores y de los nodos del fluido. Los siguientes gráficos son de una suspensión de 400 rotores en un fluido de ν = 0,01. La fracción volúmica es φ ∼ 0,3. Para los rotores vemos que la distribución no es gaussiana (Fig. 26). En vez de eso tiene un comportamiento algebraico (tipo 1/v) para velocidades pequeñas, seguido de un decaimiento exponencial que puede ser gaussiano. Para los nodos del fluido vemos que, a pesar de que en la escala lineal parece una distribución gaussiana (Fig. 27), al usar la escala semilogarı́tmica vemos desviaciones importantes, el pendiente de la recta disminuye según vamos a velocidades mayores (Fig. 28). 3. Resultados 30 2R ω ω ω ω d Figura 23: Cadena de rotores equiespaciados 4×10 -3 ω (φ) 2×10 -3 0 0 0.1 0.2 0.3 φ 0.4 0.5 0.6 Figura 24: Velocidad angular en función de la fracción volúmica. 3. Resultados 4×10 31 -3 v(φ) 2×10 -3 0 0 0.1 0.2 0.3 0.4 φ 0.5 0.6 Figura 25: Velocidad lineal en función de la fracción volúmica. 2 ln n(v) 0 -2 -4 0 5 (v/u) 10 2 Figura 26: Distribución de velocidades de los rotores. 3. Resultados 32 0 0.8 -2 ln n(v) n(v) 0.6 0.4 -4 -6 0.2 -8 0 -4 -2 0 2 4 0 2 Figura 27: Distribución de velocidades del fluido en escala lineal, tiene un gran parecido con una gaussiana. 4 (v/u) v/u 6 8 2 Figura 28: Distribución de velocidades del fluido en la escala semilogarı́tmica, en ella vemos las desviaciones respecto a una gaussiana. Sin embargo, debido a que la estadı́stica necesaria para resolver bien los gráficos es enorme, no podemos decir nada concreto sobre los comportamientos de estas distribuciones, sólo hacer la observación de que tenemos desviaciones respecto a las distribuciones gaussianas, lo que significa que la naturaleza de esta dinámica de tiempos cortos es claramente fuera del equilibrio. 3.4.3. Tiempos largos Definimos como tiempo largo al tiempo para el cual las partı́culas (los rotores) se han desplazado una fracción considerable del tamaño del sistema. Calculamos el desplazamiento cuadrático medio, definido como: < ∆r2 (t) >= N 1 X 2 ri (t + τ ) − ri2 (τ ) N i=1 (13) siendo N el número de partı́culas suspendidas en el fluido. Vemos (Fig. 29) que después de un régimen transitorio (règimen I) en el que las partı́culas, partiendo del reposo, se aceleran el desplazamiento pasa a ser balı́stico (règimen II), en el que las partı́culas se desplazan como < ∆r2 >∼ τ 2 , cada uno de los rotores viaja independientemente de los demás. Después hay un crosover a un régimen superdifusivo (règimen III), en el que < ∆r2 >∼ τ α , donde α ∼ 1,5. Este exponente no es muy lejano al 5/3 predicho en la teorı́a RTP [21] [5]. Posteriormente un régimen difusivo (règimen IV), en el que el desplazamiento cuadrático medio es lineal con el tiempo. 3. Resultados 33 8 IV 2 ln <∆r (t)> 6 III 4 II 2 0 -2 4 I 8 6 10 ln t Figura 29: Desplazamiento cuadrático medio para una suspensión de 400 rotores en un fluido de ν = 0,01. La fracción volúmica es φ ∼ 0,3. 3.5. Cristal de Wigner triangular Este sistema muestra, en contraste con el caso de membranas con canales o bombas, un comportamiento colectivo no trivial debido a que el movimiento rotatorio puede inducir interacciones hidrodinámicas repulsivas entre los rotores. Las interacciones hidrodinámicas efectivas entre motores rotatorios son de largo alcance y repulsivas, decaen como 1/x. En ausencia de fluctuaciones térmicas, el estado estacionario es un cristal de Wigner triangular, ver Fig. 30. Cuando la velocidad angular estacionaria de las partı́culas es alta, los motores pueden formar esta estructura cristalina triangular. Para velocidades menores forman una fase desordenada. Esta estructura triangular es marginalmente estable. Solo puede ser estabiV lizada a través de la fuerza inercial de Magnus FM o su análogo viscoso FM . Deberı́amos obtener orden hexático en la distribución de partı́culas en el fluido. Se deberı́a notar en el comportamiento del desplazamiento cuadrático medio, que deberı́a tener un plateau a tiempos largos. Entonces se podrı́a caracterizar la transición de fase para un cierto valor de la velocidad angular ω ∗ para la cual si ω > ω ∗ los rotores se ordenan como un cristal de Wigner y para ω < ω ∗ no se ordenan. 3. Resultados 34 Figura 30: Cristal de Wigner triangular Parámetro de orden hexatico Es una medida de si la distribución de motores rotatorios tiende a ordenarse según una red triangular definimos el parámetro hexático: Ψ6 = ψ6 (~xi ) = N 1 X ψ6 (~xi ) N i=1 Ni i 1 X ei6θj (~x ) Ni j=1 (14) (15) cogemos la parte real de este parámetro de orden: Ni 1 X ψ6 (~x ) = cos (6θj (~xi )) Ni j=1 i (16) donde N es el número total de partı́culas, Ni es el número de vecinos de la partı́cula i y θj (~xi ) es el ángulo entre la horizontal y la recta que une las partı́culas i y j [22]. θj (~xi ) = arctan zi − z j yi − yj (17) De hecho este parámetro de orden no es más que < cos(6θ) >, que geométricamente tiene bastante sentido (Fig. 31). Lo que falta es decidir el criterio de vecinidad, es decir, cuando dos partı́culas son vecinas. La definición teórica es: dos partı́culas son vecinas si comparten un lı́mite de una celda de Voronoi. Pero nosotros haremos una aproximación, debido a que estamos en 2 dimensiones: una partı́cula j es vecina de i si está centrada dentro de la circunferencia de radio R0 = 3R centrada en i. 3. Resultados 35 π/6 Figura 31: Definición del ángulo que define el parámetro hexático Estabilidad del cristal En hidrodinámica lineal (ecuación de Stokes) la red triangular es marginalmente estable. La hidrodinámica no lineal tiene en cuenta la corrección inercial de 1er orden a la ecuación de Navier-Stokes, donde esta corrección genera una fuerza de Magnus que actúa sobre el rotor: F~M = −2πρl R3 rω̃êφ ∧ ω ~ (18) donde, debido al análisi lineal: ω̃ = 3ω ∞ X R3 R3 = 3ξ(3)ω 3 3 3 m a a m=1 (19) Esta fuerza de Magnus devuelve a su posición inicial a los rotores que se desplazan respecto a la estructura de red, estabiliza la red hexagonal. En nuestro código tenemos la posibilidad de introducir esta corrección inercial en el operador de colisiones de la ecuación de Boltzmann. Tiempo de relajación a la estructura hexática: balance entre la fuerza de Magnus y la fricción de Stokes: 6πηR De esta manera: dr = −2πρl ωr(t)ω̃R3 dt ρl ω 2 R 5 1 ∼ tr ηa3 (20) (21) donde a es la distancia interatómica, en nuestro caso la distancia caracterı́stica de la red. De esta manera, el tiempo de relajación al cristal de Wigner es: tr ∼ ν vθ2 φ (22) 3. Resultados 36 siendo φ la fracción volúmica. Queremos que este tiempo sea menor que el tiempo para el que los rotores se han difundido y estan en equilibrio. Para fracciones volúmicas mayores y viscosidades menores llegaremos antes a este régimen en que la distribución de rotores en el fluido está en la configuración de equilibrio. Importancia de la geometrı́a Comparación entre discos y esferas. Hasta ahora hemos suspendido discos en una superficie plana que considerábamos la membrana y que a parte era todo el fluido que tenı́amos en cuenta en la simulación. Nos dimos cuenta que estos discos, en realidad cilindros infinitos, no tienen vorticidad, de manera que no existe una fuerza que estabilice una red hexagonal. De esta manera decidimos suponer un fluido tridimensional en el que una sección del mismo es la membrana y es en esta superficie donde los rotores, en este caso esferas, tienen libertad de movimiento. Imponemos la prohibición de explorar el fluido no contenido en la superficie de membrana. Resultado negativo Hemos usado los parámetros indicados para obtener la red triangular en el caso tridimensional pero nos ha sido imposible. De hecho hemos generado una condición inicial consistente en N partı́culas distribuı́das según una red hexagonal y hemos comprobado que esta red es inestable. Se producen dislocaciones que se propagan por todo el fluido y el parámetro hexático decrece de 1 a 0 en un tiempo relaxacional caracterı́stico. 3.5.1. Difusión activa Ya hemos dicho que el flujo hidrodinámico generado por motores rotatorios puede cambiar las propiedades de la membrana. De hecho, la difusión de otras partı́culas suspendidas en el fluido aumenta debido a la interacción hidrodinámica con estos rotores. Cambio del coeficiente de difusión. Integral de Green-Kubo (autocorrelación de las velocidades angulares). Z 1 ∞ δD = dt < ~v (~x, t) · ~v (~x, 0) > (23) 2 0 donde Dm es la difusión de equilibrio, y según [11]: δD 9πρd2 τ 2 ∼ ( ) Dm 16 kB T (24) Las fluctuaciones de la densidad local de motores rotatorios induce fluctuaciones locales del campo de velocidades. 4. Conclusiones 3.6. 37 Fluctuaciones: acoplamiento entre los rotores y las fluctuaciones de la membrana Introducir la temperatura en el modelo. Un ruido de no-equilibrio aumenta las fluctutaciones de la forma de la membrana. Asumiendo que los motores permanecen con el eje de giro perpendicular a la membrana y que el flujo creado por el motor puede ser caracterizado por los torques ejercidos sobre las 2 partes del motor en la dirección normal a la membrana. 4. Conclusiones En este trabajo he querido hacer una introducción a la estructura y funcionalidad de las membranas, haciendo hincapié en la necesidad de considerar los centros activos a la hora de describirlas. He querido analizar el papel de los motores rotarios como es el caso de la ATP-asa y los cilios, y para ello me he basado en el trabajo teórico realizado por J. Prost et al.. A través de simulaciones numéricas mesoscópicas he realizado un modelo sencillo de dichos motores rotatorios suspendidos en un fluido en el que las interacciones hidrodinámicas están incluı́das. He querido reproducir los resultados teóricos de Prost y, de esta manera, testar el modelo, el resultado ha sido positivo en lo que se refiere a los comportamientos individuales o de 2 partı́culas. Estudiando los movimientos colectivos, podemos llegar a entender fenómenos cooperativos que se dan lugar en las membranas biológicas. Queremos indicar brevemente cuál será el trabajo futuro: Estudio sistemático de las distribuciones de velocidades para esferas rotatorias y para el fluido. Estudio de los diferentes regı́menes dinámicos, caracterización de posibles transiciones con la fracción volúmica. Estudio de la estructuración de los rotores en el fluido. Elaborar la misma teorı́a con mezclas binarias. Hacer que la membrana separe 2 fluidos diferentes, caracterizados por distintas viscosidades (ν1 y ν2 ). Usar motores dipolares en vez de motores monopolares y ver qué diferencias fundamentales hay en las interacciones entre ellos. Una molécula de ATP hace una rotación de 120o y luego está parada durante aproximadamente 30s, tiempo en el que se produce la catálisis. Hay modelos de dos estados, en el que los centros activos se encienden y se apagan, donde las transiciones se producen aleatoriamente para ası́ captar la naturaleza estocástica de estas bombas [21]. REFERENCIAS 38 El estudio de la difusión entorpecida [6] de las proteı́nas de membrana puede ser una prueba para saber la naturaleza de las interacciones entre proteı́nas y los constituyentes de la membrana donde residen. El conocimiento de estas interacciones es la clave para conocer el funcionamiento global de las células. Referencias [1] B. Alberts et al., The Molecular Biology of the Cell, 4th edition (Garland, New York, 2002). [2] P.G. Saffman and M. Delbruck, Proc. Natl. Acad. Sci. USA 72, 3111 (1975). [3] T.L. Dodd, D.A. Hammer, A.S. Sangani and D.L. Koch, J. Fluid. Mech. 293, 147 (1995). [4] S.J. Singer and G.L. Nicolson, Science 175, 720 (1972). [5] S. Ramaswamy, J. Toner, J. Prost, Phys. Rev. Lett. 84, 3494 (2000). [6] D.J. Müller, A. Engel, U. Matthey, T. Meier, P.Dimroth and K.Suda, J. Mol. Biol. 327, 925 (2003). [7] H.Luecke et al., Science 286, 255 (1999). [8] S.Subramamiam and R.Henderson, Nature 406, 653 (2000). [9] J-B. Manneville, P.Bassereau, D. Lévy and J.Prost, Phys.Rev. Lett. 82, 4356 (1999). [10] P. Lenz, J-F. Joanny, F. Jülicher and J. Prost, Phys. Rev. Lett. 91, 108104 (2003). [11] P. Lenz, J-F. Joanny, F. Jülicher and J. Prost, Eur. Phys. J. E 13, 379 (2004). [12] H.Wang and G.Oster, Nature 396, 279 (1998). [13] Y. Sombongi, Y. Iko, M. Tanabe et al., Science 286, 1722 (1999). [14] W. Junge, Proc. Natl. Acad. Sci. USA 96, 4735 (1999). [15] R.L.Cross, Nature 427, 407 (2004). [16] M. Cosentino Lagomarsino, B.Bassetti and P.Jona, Eur. Phys. J. B 26, 81 (2003). [17] A.J.C. Ladd and R.Verberg, J. Stat. Phys. 104, 516 (2001). [18] C.P. Lowe, A. Masters and D. Frenkel, J. Chem. Phys. 103, 4 (1995). REFERENCIAS [19] I. Llopis and I. Pagonabarraga, preprint. [20] Adachi K, Itoh H, Nishizaka T et al., Bioph. J. 80, 655.53 (2001). [21] D. Lacoste and A.W.C. Lau, Eur. Phys. Lett. 10, 1209 (2005). [22] S. Pronk and D. Frenkel, Phys. Rev. E 69, 066123 (2004). 39