DISEÑO E IMPLEMENTACION DE UN MODULO DE BAJO
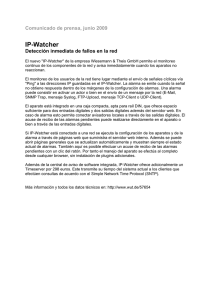
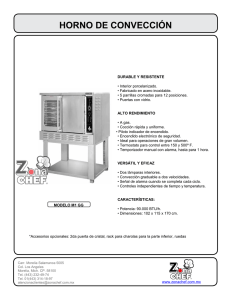
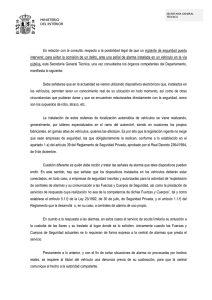
Anuncio

DISEÑO E IMPLEMENTACION DE UN MODULO DE BAJO COSTO DE ENCENDIDO AUTOMATICO DE AUTOMOVILES Por Pablo Gutiérrez Torres y Luis Eduardo Chávez Muñoz Presentado a la Academia de Sistemas Digitales y Comunicaciones Del Instituto de Ingeniería y Tecnología de La Universidad Autónoma de Ciudad Juárez Para su evaluación LA UNIVERSIDAD AUTÓNOMA DE CIUDAD JUÁREZ Octubre del 2009 DISEÑO E IMPLEMENTACION DE UN MODULO DE BAJO COSTO DE ENCENDIDO AUTOMATICO DE AUTOMOVILES Alejandra Mendoza Carreón Presidente de la academia ___________________________________________ Ana Luz Portillo Hernández Asesor ___________________________________________ Pablo Gutiérrez Torres Alumno ___________________________________________ Luis Eduardo Chávez Muñoz Alumno ___________________________________________ INTRODUCCION Las actuales condiciones de inseguridad en Cd. Juárez, han elevado considerablemente el número de delitos en la comunidad; uno de los delitos con mayor crecimiento ha sido el robo de automóviles. Se han registrado más de 7 mil robos de vehículos en este 2009 en el estado de Chihuahua, con un margen de recuperación del 40 por ciento de los automotores de acuerdo a cifras oficiales. [1] Esto ha ocasionado un crecimiento del mercado de alarmas automotrices. Este sector se ha desarrollado notablemente en los últimos años, principalmente en cuanto a tecnología se refiere, brindando cada vez más y mejores funciones para el usuario. Este proyecto va enfocado hacia este campo de la industria. La idea es lograr un avance implementando un módulo de bajo costo; en la actualidad, su costo no lo hace accesible para toda la gente. La función de este módulo es lograr el encendido de un automóvil por medio de radiofrecuencia a través de los canales auxiliares de la alarma, el diseño de este módulo se realizará por medio de relevadores, diodos y resistencias, con la finalidad de que nuestro aporte sea más económico que las opciones disponibles en el mercado. A continuación explicaremos los motivos que nos llevaron a la realización de este proyecto y la serie de pasos para llevarlo a cabo, así como las bases con las que ya se contamos dentro de este ramo de la industria. ANTECEDENTES DEL PROBLEMA El primer caso documentado de robo de automóvil sucedió en 1896, desde entonces hasta la fecha, este delito se ha convertido en un negocio muy lucrativo para los delincuentes. Hoy en día muchos automóviles cuentan con sistemas sofisticados de protección, tales como sensores electrónicos, alarmas de movimiento y sistemas de activación remota. Estos sistemas están formados por una computadora central que monitorea todos los equipos de detección que permiten que la alarma se active; cuenta con sensores tanto de presión, térmicos y de varios tipos colocados en lugares estratégicos. Tienen baterías auxiliares por si la principal es desconectada, y equipo de radiofrecuencia para poder conectar y desconectar el módulo desde la llave. PLANTEAMIENTO DEL PROBLEMA A través de los años los automóviles han sido codiciados por los delincuentes y por ello se han desarrollado sistemas de seguridad para los mismos. Estos sistemas de seguridad han evolucionado a través de los años brindándonos mejores prestaciones para el usuario, sin embargo su costo los pone fuera del alcance de buena parte de la población, el presente proyecto busca realizar una mejora en los sistemas ya existentes, abaratando el costo de los mismos. MARCO TEÓRICO Actualmente, muchos autos cuentan con sistemas sofisticados de protección, tales como sensores electrónicos, alarmas de movimiento y sistemas de activación remota. El sistema de alarmas más sencillo es un sensor conectado a una puerta, y cuando es abierta, se activa una alarma sonora. Estos sistemas están conformados por una computadora central que monitorea todos los equipos de detección y hacen que suenen colocados en lugares estratégicos. Algunos de los equipos que usaremos en el modulo van a hacer: -Relevadores. Relevadores que trabajan con 12 voltios de una batería, la misión de los relevadores es enviar grandes corrientes desde la batería hacia el punto que sea necesario alimentar con el mínimo riesgo de perdidas, puesto que, la conmutación se ejecuta por medio de unos contactos de baja resistencia y su control se realiza con una pequeña corriente de alimentación que puede ser enviada por cualquier interruptor de vehículo. También se trabaja con diodos que es el paso de corriente que se establece un único sentido, mientras que para la polaridad opuesta el semiconductor opone una gran resistencia. [2] -Alarma antirrobo. La alarma consta de sensores que un dispositivo que, a partir de la energía del medio donde se mide, da una señal de salida transducible que es función de la variable medida. [3] -Radiofrecuencia. La radiofrecuencia se genera de un campo electromagnético, adecuado para transmisión de datos de modo inalámbrico. Estas frecuencias cubren un rango significativo del espectro de radiación electromagnética desde 9 Khz, frecuencia que se encuentra todavía dentro del rango captable por el oído humano. [4] JUSTIFICACIÓN DE LA INVESTIGACIÓN Actualmente se ha convertido en una necesidad contar con sistemas de seguridad para nuestros automóviles, el desarrollo de estos instrumentos ha sido tal, que se han podido añadir funciones tales como activar o desactivar los seguros en las puertas, encendido del motor o abrir y cerrar las ventanas, todo esto por medio de una señal emitida desde el control remoto de la alarma. El mercado de sistemas antirrobo se encuentra en constante crecimiento, por lo que nuestro dispositivo logrará reducir los costos para casi cualquier usuario de alarmas automotrices, siempre que esta cuente con entradas auxiliares para conectar el módulo que pretendemos diseñar. Ya existen dispositivos capaces de realizar este trabajo, nuestro proyecto logrará lo mismo reduciendo la complejidad y el costo en comparación con los dispositivos existentes. OBJETIVO GENERAL. Diseñar un sistema de bajo costo capaz de lograr el encendido a distancia de cualquier automóvil, aprovechando el sistema de alarma ya instalada previamente. METODOLOGÍA Nuestro proyecto consiste en lograr el encendido de un automóvil por medio del control remoto (radiofrecuencia) de la alarma instalada en el automóvil. Esto lo lograremos diseñando un módulo independiente de la alarma que actúa por medio de relevadores para lograr el encendido del carro, conectado en uno de los canales auxiliares con los que cuenta la alarma. Objetivos específicos: 1.-Conocer el funcionamiento de una alarma automotriz. 2.-Realizar investigación acerca de módulos existentes para el encendido remoto del automóvil. 3.-Encontrar material y los componentes más convenientes para realizar el proyecto. 4.-Conectar el módulo con el sistema de alarma. 5.-Realizar pruebas para verificar el buen funcionamiento del módulo. 6.-Documentar el proyecto. 7.-Extraer conclusiones y hacer cambios pertinentes al proyecto. Metas: 1.-Investigar diferentes fuentes sobre el desarrollo de un sistema de alarma automotriz para mediados de enero. 2.-Consultar diversas fuentes de información sobre los módulos de encendido remoto de un automóvil que existen actualmente para finales de enero. 3.-Tener nuestro prototipo armado físicamente para mediados de febrero. 4.-Tener nuestro módulo conectado al sistema de alarma y funcionando hacia mediados de marzo. 5.-Haber realizado los cambios necesarios en el proyecto, de acuerdo a los resultados de las pruebas para finales de marzo. 6.-Haber documentado el correcto funcionamiento del módulo para mediados del mes de abril. 7.- Haber obtenido las conclusiones finales para los últimos días de abril. 8.- Presentar proyecto ACCIONES PARA META 1. Investigar biblioteca UACJ. Investigar internet. Visita a proveedores de alarmas. ACCIONES PARA META 2. Investigar biblioteca UACJ. Investigar internet. Visita a proveedores de alarmas. ACCIONES PARA META 3. Diseñar el diagrama del módulo. Armar el módulo. ACCIONES PARA META 4. Acoplar nuestro módulo al sistema de alarma de acuerdo al diseño. ACCIONES PARA META 5. Realizar pruebas con el módulo. Detectar posibles errores y corregirlos. ACCIONES PARA META 6. Investigar biblioteca UACJ. Investigar internet. Demostrar científicamente el funcionamiento de nuestro módulo. ACCIONES PARA META 7. Comparar los resultados obtenidos con los resultados esperados y obtener conclusiones. ACCIONES PARA META 8. Elaborar presentación. Preparar y ensayar la presentación. REQUERIMIENTO PARA META 1. Computadora con internet Credencial UACJ Lista de proveedores de alarmas Tiempo 20 horas REQUERIMIENTO PARA META 2 Computadora con internet Credencial UACJ Lista de proveedores de alarmas Tiempo 20 horas REQUERIMENETO PARA META 3 Lugar de trabajo. Componentes y herramientas necesarias. Tiempo 20 horas. REQUERIMIENTO PARA META 4 Lugar de trabajo. Componentes y herramientas necesarias. Tiempo 10 horas. REQUERIMIENTO PARA META 5 Lugar para realizar las pruebas. Tiempo 20 horas. REQUERIMIENTO PARA META 6 Computadora con internet Credencial UACJ Tiempo 30 horas. REQUERIMIENTO PARA META 7 Computadora con internet Haber realizadas los cambios pertinentes REQUERIMIENTO PARA META 8 Computadora con Power Point. Aula y cañon. CALENDARIZACIÓN Etapa: Diseño Actividad 1 Actividad 2 Actividad 3 Actividad 4 Actividad 5 Actividad 6 Actividad 7 Actividad 8 Enero Febrero Marzo Abril Mayo Semanas Semanas Semanas Semanas Semanas 1 2 1 2 4 1 2 1 2 3 4 1 2 1 2 1 2 1 2 REFERENCIAS [1] http://www.elagoradechihuahua.com/Roban-mas-de-7-mil-vehiculos-en,17881.html Oct 10 [2]Innovación y cualificación sl, electricidad y electrónica aplicada al automóvil. Sistema de encendido. Inyección, innova 2004 [3]Ramón Pallas Areny, Sensores y acondicionadores de señal, alfa omega 3ª edición, 2000 [4] http://www.tec-mex.com.mx/promos/bit/bit0302.htm, Oct 10 DISEÑO E IMPLEMENTACIÓN DE UN MODULO DE BAJO COSTO DE ENCENDIDO AUTOMÁTICO DE AUTOMÓVILES Por Luis Eduardo Chávez Muñoz Pablo Gutiérrez Torres Presentado a la Academia de Sistemas Digitales y Comunicaciones Del Instituto de Ingeniería y Tecnología de La Universidad Autónoma de Ciudad Juárez Para obtener el título de INGENIERO EN SISTEMAS DIGITALES Y COMUNICACIONES Mayo del 2010 UNIVERSIDAD AUTÓNOMA DE CIUDAD JUÁREZ Instituto de Ingeniería y Tecnología EVALUACiÓN DE EXAMEN PROFESIONAL INTRACURRICULAR NIVEL: LICENCIATURA TEMA: Fecha: 25 de Mayo del 2010 Horario: 17:00 - 19:00 HRS. "Diseño e implementación de un modulo de bajo costo de encendido automático de automóviles" Lo evaluación del examen profesional introcurricular consto de 4 partes: (Desarrollado en 1 hora) 1°.2°._ 3°._ 4°.- Exposición por parte de los alumnos (máximo 20 minutos). Réplica por parte del jurado. Comentarios y/o recomendaciones. Entrego de resultados. Nombre del alumno: Pablo Gutiérrez Torres Calificación Maestro de la materia (30%) 30ft, Calificación Director de Trabajo (40%) Calificación del Jurado (30%) TOTAL Se recomiendo que el documento se deposite paro consulto en lo BIBLIOTECA SiD No~ Jurado Director de Trabajo --M-'~--- Cbordinador de ,lo Materia "Proyecto de Titulación" .-~~ 1 Qr. Víctor Hinoslrozo --'------&:­ FIRMADO EN ORIGINAL Ing. Isma~1 Canales UNIVERSIDAD AUTÓNOMA DE CIUDAD JUÁREZ Instituto de Ingeniería y Tecnología EVALUACIÓN DE EXAMEN Fecha: 25 de Mayo del 2010 PROFESIONAL INTRACURRICULAR NIVEL: LICENCIATURA Horario: 17:00 ­ TEMA: 19:00 HRS. "Diseño e implementación de un modulo de bajo costo de encendido automático de automóviles" La evaluación del examen profesional intracurricular consta de 4 partes: (Desarrollado en 1 hora) 1°._ 2°._ 3°.4°._ Exposición por parte de los alumnos (máximo 20 minutos). Réplica por parte del jurado. Comentarios y/o recomendaciones. Entrega de resultados. Nombre del alumno: Luis Eduardo Chávez Muñoz Calificación Maestro de la materia (30%) Calificación Director de Trabajo (40%) Calificación del Jurado (30%) TOTAL Se recomienda que el documento se deposite para consulta en la BIBLIOTECA SiD Notgr Director de Trabajo Jurado Coordinador de la Materia "Proyecto de Titulación" ~~1lA-Dr. Viciar Hinoslrazo FIRMADO EN ORIGINAL lng. lsmae anales ii Resumen. Este módulo realiza el encendido de un automóvil a través del control remoto de la alarma instalada previamente en el vehículo; la finalidad de este proyecto es abaratar el costo de los módulos existentes en el mercado. Diseñamos un módulo independiente de la alarma que actúa mediante relevadores para lograr el encendido del carro. El sistema inicia desde el control remoto de la alarma, por medio de radiofrecuencia envía una señal hacia el cerebro de la alarma instalada, una vez recibida la instrucción por la alarma, esta se comunica a través de su canal auxiliar con nuestro control de encendido es entonces cuando el módulo envía un voltaje hacia el sistema de ignición del automóvil para ponerlo en marcha. iii Declaratoria de Originalidad. Nosotros Luis Eduardo Chávez Muñoz y Pablo Gutiérrez Torres, declaramos que el material contenido en este documento es original y no ha sido copiado de ninguna otra fuente, ni ha sido usado para obtener otro título o reconocimiento en ésta u otra institución de educación superior. _______________________ Luis Eduardo Chávez Muñoz _____________________ Pablo Gutiérrez Torres iv Dedicatoria. Quiero dedicar este trabajo, que representa el último esfuerzo en esta carrera, a mi familia cuyo esfuerzo ha sido posible este logro. En especial a mi madre y mi padre que ellos son los que me han dado la fortaleza de seguir estudiando y de culminar mis estudios pero sobre todo por haberme ayudado a ser la persona que soy, igualmente quiero agradecer a mi tío Santiago Gutiérrez por su apoyo en toda mi carrera También le agradezco a mi esposa por el apoyo que me brindo durante tantos años de estudio, por su cariño, y su comprensión. Pablo Gutiérrez Torres. v Dedicatoria. Este proyecto es el paso final en un largo camino, quiero dedicar este esfuerzo a toda la gente que de una u otra forma ha formado parte de mi vida y ha contribuido en ella con enseñanzas y cariño. A toda mi familia por estar siempre ahí, a mis padres y a mi hermano por alentarme siempre a seguir adelante, por la paciencia y apoyo incondicional a lo largo de mi vida, por ser ejemplo de responsabilidad, lucha y dedicación; a ti abuela Juanita, siempre llevo tus consejos y tu confianza en mi corazón. A todos los maestros que a lo largo de mi vida estudiantil han estado dispuestos a entregar sus conocimientos y su experiencia para hacer de mí una mejor persona. A mis amigos, ustedes saben quiénes son, por estar ahí en los momentos buenos y en los momentos malos, siempre dispuestos a tender una mano y decir una palabra de aliento. Luis Eduardo Chávez Muñoz. vi Agradecimientos. Queremos agradecer a todas las personas que colaboraron de alguna manera durante el desarrollo de este proyecto, aportando su tiempo y sus conocimientos. A la maestra Ana Luz Portillo y al responsable del laboratorio de sistemas digitales Carlos Cano por el tiempo y conocimientos que aportaron. Al Doctor Víctor Manuel Hinostroza por el tiempo, la paciencia, la confianza y por proporcionarnos las bases para realizar este documento. Y finalmente deseamos agradecer también a todos los profesores de esta institución, que en algún momento de esta carrera nos guiaron para hacer de nosotros mejores personas y mejores profesionistas. Los autores. vii Lista de figuras. Figura 2.1 Diagrama de relevadores…………………………………………………6 Figura 2.2 Símbolo de diodo…………………………………………………………..7 Figura 2.3 Transistores NPN y PNP………………………………………………….9 Figura 3.1 Modulación ASK…………………………………………………………..14 Figura 4.1 Diagrama de bloques de modulo transmisor…………………………..19 Figura 4.2 Diagrama de bloques de modulo de receptor…………………………19 Figura 4.3 Codificador HT12E………………………………………………………..20 Figura 4.4 Transmisor TWS-434……………………………………………………..21 Figura 4.5 Diagrama del circuito transmisor de RF……………….……………….22 Figura 4.6 Antena del transmisor…………………………………………………….23 Figura 4.7 Antena del receptor……………………………………………………….23 Figura 4.8 Receptor RWS-434……………………………………………………….23 Figura 4.9 Decodificador HT12D…………………………………………………….24 Figura 4.10 Diagrama del circuito receptor de RF…………………………………24 Figura 4.11 Transistor 2N2222……………………………………………………….25 Figura 4.12 Relevador RAS-1210……………………………………………………26 Figura 4.13 Diagrama del módulo de relevadores…………………………………26 Figura 5.1 Pruebas en protoboard…………………………………………………...30 Figura 5.2 Diseño de las tablillas…………………………………………………….30 Figura 5.3 Tablillas impresas…………………………………………………………31 Figura 5.4 Relevador adicional……………………………………………………….31 viii Lista de tablas. Tabla 4.1 Precios de alarmas automotrices………………………………………..28 ix Índice. Resumen…………………………………………………………………………………………iii Declaración de originalidad…..…………...………………………………………..……….…iv Dedicatorias..………………………………………………...…………………………………..v Agradecimientos…………………………………………...……………….………............….vii Lista de figuras……… …………………………………………………………………………viii Lista de tablas………….………………..…………………………………………..……..……ix Capitulo 1. Introducción. ......................................................................................................... 1 Capitulo 2. Alarmas automotrices. ......................................................................................... 3 2.1 Fundamentos. ................................................................................................................ 3 2.2 Tipos de alarmas. .......................................................................................................... 4 2.3 Componentes de una alarma. ...................................................................................... 4 2.4 Interruptores mecánicos. .............................................................................................. 5 2.5 Relevadores. .................................................................................................................. 5 2.6 Sensores. ....................................................................................................................... 6 2.7 Diodo. ............................................................................................................................. 7 2.8 Principio de operación de un diodo. ............................................................................ 8 2.8.1 Polarización directa. ............................................................................................... 8 2.8.2 Polarización inversa. .............................................................................................. 8 2.9 Transistor. ...................................................................................................................... 9 Capitulo 3. Radiofrecuencia...................................................................................................11 3.1 Espectro radioeléctrico. ...............................................................................................11 3.2 Frecuencia de transmisión. .........................................................................................12 3.3 Modulación de portadoras. ..........................................................................................13 x 3.4 Modulación lineal. .........................................................................................................13 3.5 Transmisor y receptor de RF. ......................................................................................14 3.5.1 Tipos de transmisores. ..........................................................................................14 3.5.2 Tipos de receptores...............................................................................................15 3.6 Codificador y decodificador. .......................................................................................16 3.7 Antenas. ........................................................................................................................17 3.8 Parámetros fundamentales. ........................................................................................17 Capitulo 4. Diseño del sistema. .............................................................................................19 4.1 Diagrama de bloques. ..................................................................................................19 4.2 Pulso. .............................................................................................................................19 4.3 Componentes................................................................................................................20 4.3.1 El codificador HT12E. ...........................................................................................20 4.3.2 Módulos de comunicación RF. .............................................................................20 4.3.3 El decodificador HT12D. .......................................................................................23 4.3.4 Transistor 2N2222. ................................................................................................24 4.3.5 Relevadores. ..........................................................................................................25 4.3.6 Módulo de relevadores. ........................................................................................25 4.4 Funcionamiento. ...........................................................................................................26 4.5 Costos. ..........................................................................................................................27 Capitulo 5. Resultados. ..........................................................................................................30 Capitulo 6 Conclusiones y recomendaciones. .....................................................................32 Referencias. ............................................................................................................................33 Apéndice A. Codificador HT12E............................................................................................34 Apéndice B. Transmisor TWS-434........................................................................................38 Apéndice C. Receptor RWS-434...........................................................................................40 Apéndice D. Decodificador HT12D. ......................................................................................43 xi Apéndice E. Transistor 2N2222. ...........................................................................................48 Apéndice F. Relevador RAS-1210. .......................................................................................53 xii Capitulo 1. Introducción. El primer caso documentado de un robo de automóvil sucedió en el año de 1896, desde ese momento hasta la fecha este delito ha ido en crecimiento, colocándose como uno de los negocios ilícitos más rentables en el mundo, surge de ahí la necesidad de desarrollar tecnologías que brinden protección para los automóviles. Estos sistemas de seguridad han evolucionado a través de los años brindándonos mejores prestaciones para el usuario. En la actualidad podemos encontrar alarmas vehiculares de diversas gamas, con diversas funciones; una de estas prestaciones es poder encender el motor de un automóvil desde el control remoto de la alarma, esta función ha brindado mayor comodidad al usuario protegiéndolo de condiciones climáticas adversas, ahorrándole tiempo, y dándole mayor seguridad en el momento de abordar el automóvil. A continuación se muestra el desarrollo de un proyecto para dotar casi cualquier alarma con el sistema de arranque automático, para lograr este propósito será necesario contar con una alarma que tenga un canal auxiliar disponible; en la actualidad las alarmas que cuentan con dicha función, tienen un precio elevado a comparación de alarmas más sencillas, también es posible encontrar en el mercado el módulo arrancador en forma independiente sin embargo su precio sigue siendo elevado, por lo tanto se busca abaratar los costos en la fabricación de este módulo; reduciendo los costos se busca hacer accesible al mayor número posible de personas este tipo de tecnología. En este proyecto se sustituye el módulo de arranque automático, construido normalmente mediante circuitos electrónicos programables, por un simple arreglo de relevadores. Los relevadores nos ofrecen la posibilidad de controlar un dispositivo a distancia mediante el uso de pequeñas señales de control. El proyecto consta básicamente de dos partes, la parte transmisora y la parte receptora, que será la que active el módulo de relevadores. Para establecer la comunicación por radiofrecuencia entre el transmisor y el receptor que enviará la señal de control al módulo de relevadores, fue necesario aplicar los conocimientos adquiridos en el área de comunicaciones. Para realizar los circuitos que entreguen los voltajes requeridos para encender el vehículo, se utilizaron los conocimientos adquiridos en los campos de los 1 sistemas digitales y la electrónica. También se llevó a cabo una investigación dentro del mercado local de las alarmas automotrices para poder comparar los costos de las opciones disponibles con el módulo aquí presentado Por motivos de seguridad decidimos no trabajar directamente sobre el vehículo, así que construimos una maqueta para probar el proceso. La maqueta está conformada por un bloque transmisor y un bloque receptor. La comunicación entre ambos bloques se realiza mediante radiofrecuencia. El bloque transmisor representa el control remoto encargado de enviar la señal que recibirá la alarma, por lo que fue necesario construir una tablilla con el circuito necesario para conseguir esta función. El bloque receptor simula el sistema a ser instalado en el vehículo, consta de un receptor y un decodificador; estos componentes realizan la función de la alarma encargada de enviar la señal necesaria para accionar el sistema de relevadores que ponen en funcionamiento la ignición y la marcha del automóvil, representados en la maqueta mediante luces de 12 volts, voltaje que maneja el vehículo para arrancar. Se implementó además una señal de seguridad en el freno del automóvil, representada por un interruptor. El funcionamiento de ambos bloques se explica a detalle en el capítulo cuatro. El funcionamiento del sistema se explica más a detalle en los capítulos siguientes. 2 Capitulo 2. Alarmas automotrices. A través de los años el robo de automóviles se ha convertido en uno de los delitos con más incidencia, debido a que resulta muy rentable para los delincuentes, por ello se han desarrollado sistemas de seguridad para los automóviles. Las alarmas automotrices tienen el fin de suministrarles a los conductores mecanismos que les permitan conservar de forma segura su vehículo cuando se encuentran lejos de él, además de actuar como elemento disuasivo de ladrones, representa la opción más económica, pues de acuerdo con la marca, la capacidad y la instalación, su costo puede oscilar entre los $850 y los $5000 pesos. 2.1 Fundamentos. Estos sistemas están formados por una computadora central que monitorea todos los equipos de detección que permiten que la alarma se active; cuenta con sensores tanto de presión, térmicos y de varios tipos colocados en lugares estratégicos. Tienen baterías auxiliares por si la principal es desconectada, y equipo de radiofrecuencia para poder conectar y desconectar el módulo desde la llave. El sistema de alarma más sencillo está formado por un sensor conectado a una puerta, que cuando es abierta, activa una alarma sonora. En general el funcionamiento de una alarma vehicular es bastante elemental: cada vez que usted oprime el botón del control remoto, está activando un código, el cual contiene subcódigos que se van anulando para dar paso al siguiente, dentro de una gama que llega a las cuatro billones de posibilidades. Este mecanismo electrónico exige la presencia de un módulo, que se encarga de recibir las señales que capta un sensor que, a su vez, funciona por vibración (golpes) o por ultrasonido. La instalación de una alarma vehicular es un proceso que requiere intervenir los cables de los interruptores de las puertas, el encendido del carro, las luces, el cofre, la cajuela y la corriente del vehículo que viene de la batería. Entonces, cuando el módulo percibe una acción no autorizada tiene dos salidas: sirena y luces, es decir, se dispara y avisa por efecto de sonido y encendiendo los sistemas eléctricos de las luces. 3 Las alarmas modernas permiten que con presionar una clave desde el celular, un vehículo quede totalmente bloqueado. Algunos sistemas constan de pequeños dispositivos conectados a la alarma del vehículo; una vez estos se disparan realizan una llamada al teléfono móvil del propietario, alertando al propietario del posible robo de su carro. 2.2 Tipos de alarmas. Las alarmas automotrices se pueden dividir en 2 categorías: OEM: Integrado en el vehículo en la fábrica. Casi todas las alarmas OEM suelen ser activadas y desactivadas mediante un control remoto Estos dispositivos permiten a menudo que al tocar el automóvil o al percibir ruidos de alta frecuencia la alarma se active sin motivo aparente. Este comportamiento ha dado lugar a una epidemia de bocinazos. Del mercado. Instalada en cualquier momento después de que el auto ha sido construido, como por el nuevo distribuidor del vehículo, una tienda de accesorios de automóviles, o el dueño del vehículo. Al igual que las alarmas OEM, los sistemas del mercado de accesorios suelen ser activados y desactivados a través de control remoto. Nuestro proyecto va enfocado para las alarmas que se encuentran en el mercado y no cuentan con la función de encendido automático desde el control remoto. 2.3 Componentes de una alarma. Las alarmas se componen básicamente de interruptores, relevadores y sensores. Los sistemas de seguridad dependen de los interruptores para gobernar el flujo de la corriente eléctrica, los cuales pueden ser mecánicos, electromagnéticos o electrónicos. Los interruptores mecánicos y electromagnéticos emplean partes movibles; en cambio, las de los interruptores electrónicos son fijas. 4 2.4 Interruptores mecánicos. La función de un interruptor es controlar el flujo de la corriente eléctrica. Los tipos de interruptores que se usan más a menudo poseen contactos normalmente abiertos (NA). En la posición desconectada, los contactos se encuentran abiertos y no circula corriente por el interruptor. En la posición conectada, los contactos están cerrados (se tocan entre sí) para permitir que fluya la corriente por el interruptor. 2.5 Relevadores. Un relevador es un dispositivo que controla el estado de un interruptor mediante una entrada eléctrica. En su interior, posee comúnmente una bobina que al energizarse (por ley de Faraday) induce una fuerza magnética que cambia el estado del interruptor. Existen relevadores con interruptores normalmente (es decir sin flujo eléctrico) abiertos y normalmente cerrados. Además de esa característica también existen relevadores con múltiples entradas y múltiples interruptores. Tipos de relevadores. Relevador SPDT: (Único polo doble). Consisten en una bobina (terminales 85 y 86), una terminal común (30), una terminal normalmente cerrada (87a) y una terminal normalmente abierta (87). Cuando la bobina del relevador está en reposo (sin corriente), la terminal común (30) y la terminal normalmente cerrada (87a) tienen continuidad. Cuando la bobina tiene corriente, la terminal común (30) y la terminal normalmente abierta (87) tienen continuidad. La figura 2.1 muestra en el centro el relevador en reposo, con la bobina sin corriente. El diagrama a continuación de la derecha muestra el relevador con la bobina bajo corriente. Como se puede ver la bobina es un electroimán que activa el brazo que siempre está conectado a la terminal común (30) como pivote cuando esta bajo corriente el contacto es roto desde la terminal normalmente cerrada (87a) y con la terminal normalmente abierta (87). La bobina de un transmisor SPDT que más comúnmente utilizamos entrega muy poca corriente (menos de 200 miliamperes) y la cantidad de corriente que puede pasar a través común de un relevador, normalmente cerrada, y contactos normalmente abiertos administrará hasta 30 o 40 amperes. Esto le permite cambiar dispositivos como faros, luces de estacionamiento, etc., con salidas de 5 amperaje bajos como los que se encuentran en sistemas de alarma, encendido sin llave y otros componentes. Relevador SPST: (Único polo único). Consisten en una bobina (terminales 85 y 86), una terminal común (30) y una terminal normalmente abierta (87). No tiene una terminal normalmente cerrada como el relevador SPDT, pero puede usarse en lugar de SPDT, en los relevadores en todos los diagramas que se muestran, no se usa la terminal 87a. Figura 2.1 Diagramas de relevadores. Cuando la bobina de un relevador se energiza, la polaridad de la bobina no importa a menos que haya un diodo a través de la bobina. Si no hay un diodo presente, se podrá adjuntar tensión positiva a cualquier terminal de la bobina y el voltaje negativo al otro, de lo contrario se debe conectar la tensión positiva al lado de la bobina que está conectado al lado de cátodo (lado con franja) del diodo y el negativo al lado de la bobina que está conectado al lado de ánodo del diodo. 2.6 Sensores. Un sensor consta de algún elemento sensible a una magnitud física ,como por ejemplo la intensidad o color de la luz, temperatura, presión, magnetismo, humedad; y debe ser capaz, por su propias características, o por medio de dispositivos intermedios, de transformar esa magnitud física en un cambio eléctrico que se pueda alimentar en un circuito que la utilice directamente, o sino en una etapa previa que la condicione (amplificando, filtrando, etc.), para que finalmente se la pueda utilizar para el control de la alarma. 6 Tipos de sensores. Existe una amplia variedad de dispositivos diseñados para percibir la información externa de una magnitud física y transformarla en un valor electrónico que sea posible introducir al circuito de control. Sensores de corriente. Los sensores de corriente monitorizan corriente continua o alterna. Se incluyen sensores de corriente lineales ajustables, de balance nulo, digitales y lineales. Los sensores de corriente digitales pueden hacer sonar una alarma, arrancar un motor, abrir una válvula o desconectar una bomba. La señal lineal duplica la forma de la onda de la corriente captada, y puede ser utilizada como un elemento de respuesta para controlar un motor o regular la cantidad de trabajo que realiza una máquina. Sensores de presión y fuerza. Los sensores de presión son pequeños, fiables y de bajo costo. Ofrecen una excelente repetitividad y una alta precisión y fiabilidad bajo condiciones ambientales variables. Además, presentan unas características operativas constantes en todas las unidades y una intercambiabilidad sin recalibración. 2.7 Diodo. El diodo semiconductor es el dispositivo semiconductor más sencillo y se puede encontrar, prácticamente en cualquier circuito electrónico. Los diodos se fabrican en versiones de silicio (la más utilizada) y de germanio. Figura 2.2 Símbolo del diodo (A - ánodo, K - cátodo). 7 Los diodos constan de dos partes, una llamada N y la otra llamada P, separados por una juntura llamada barrera o unión. Esta barrera o unión es de 0.3 voltios en el diodo de germanio y de 0.6 voltios aproximadamente en el diodo de silicio. 2.8 Principio de operación de un diodo. El semiconductor tipo N tiene electrones libres (exceso de electrones) y el semiconductor tipo P tiene huecos libres (ausencia o falta de electrones).Cuando una tensión positiva se aplica al lado P y una negativa al lado N, los electrones en el lado N son empujados al lado P y los electrones fluyen a través del material P mas allá de los límites del semiconductor. De igual manera los huecos en el material P son empujados con una tensión negativa al lado del material N y los huecos fluyen a través del material N. En el caso opuesto, cuando una tensión positiva se aplica al lado N y una negativa al lado P, los electrones en el lado N son empujados al lado N y los huecos del lado P son empujados al lado P. En este caso los electrones en el semiconductor no se mueven y en consecuencia no hay corriente. El diodo se puede hacer trabajar de 2 maneras diferentes: 2.8.1 Polarización directa. Es cuando la corriente que circula por el diodo sigue la ruta de la flecha (la del diodo), o sea del ánodo al cátodo. En este caso la corriente atraviesa el diodo con mucha facilidad comportándose prácticamente como un corto circuito. 2.8.2 Polarización inversa. Es cuando la corriente en el diodo desea circular en sentido opuesto a la flecha (la flecha del diodo), del cátodo al ánodo. En este caso la corriente no atraviesa el diodo, y se comporta prácticamente como un circuito abierto.Los diodos más a menudo se utilizan a través de la bobina para proporcionar una ruta de acceso para corriente cuando se interrumpe la ruta actual a la retransmisión (es decir, desactivado, bobina ya no bajo corriente). Esto permite que el campo de bobina se pueda contraer sin la púa de voltaje que de lo contrario se genera. El diodo protege al interruptor o la retransmisión de contactos y otros circuitos que pueden ser sensibles a picos de tensión. 8 2.9 Transistor. El transistor bipolar es el más común de los transistores, y como los diodos, puede ser de germanio o silicio. Existen dos tipos transistores: el NPN y el PNP, y la dirección del flujo de la corriente en cada caso, lo indica la flecha que se ve en el gráfico de cada tipo de transistor. El transistor es un dispositivo de 3 patillas con los siguientes nombres: base (B), colector (C) y emisor (E), coincidiendo siempre, el emisor, con la patilla que tiene la flecha en el gráfico de transistor. El transistor es un amplificador de corriente, esto quiere decir que si le introducimos una cantidad de corriente por una de sus patillas (base), el entregará por otra (emisor), una cantidad mayor a ésta, en un factor que se llama amplificación. Este factor se llama b (beta) y es un dato propio de cada transistor. Figura 2.3 Transistores NPN y PNP. Región de corte: Un transistor esta en corte cuando: Corriente de colector = corriente de emisor = 0, (Ic = Ie = 0) En este caso el voltaje entre el colector y el emisor del transistor es el voltaje de alimentación del circuito. (Como no hay corriente circulando, no hay caída de voltaje). Este caso normalmente se presenta cuando la corriente de base = 0 (Ib =0) Región de saturación: Un transistor está saturado cuando: Corriente de colector = corriente de emisor = corriente máxima, (Ic = Ie = I máxima) En este caso la magnitud de la corriente depende del voltaje de alimentación del circuito y de las resistencias conectadas en el colector o el emisor o en ambos, ver ley de Ohm. Este caso normalmente se presenta cuando la corriente de base es lo suficientemente 9 grande como para inducir una corriente de colector β veces más grande. (Recordar que Ic = β * Ib). Región activa: Cuando un transistor no está ni en su región de saturación ni en la región de corte entonces está en una región intermedia, la región activa. En esta región la corriente de colector (Ic) depende principalmente de la corriente de base (Ib), de β (ganancia de corriente de un amplificador, es un dato del fabricante) y de las resistencias que hayan conectadas en el colector y emisor). Esta región es la más importante si lo que se desea es utilizar el transistor como un amplificador. Configuraciones: Hay tres tipos de configuraciones típicas en los amplificadores con transistores, cada una de ellas con características especiales que las hacen mejor para cierto tipo de aplicación. y se dice que el transistor no está conduciendo. Normalmente este caso se presenta cuando no hay corriente de base (Ib = 0). .-Base común - Emisor común -Colector común 10 Capitulo 3. Radiofrecuencia. El término radiofrecuencia, también denominado espectro de radiofrecuencia o RF, se aplica a la porción del espectro electromagnético, situada entre unos 3 Hz y unos 300 GHz. El Hertz es la unidad de medida de la frecuencia de las ondas radioeléctricas, y corresponde a un ciclo por segundo. Las ondas electromagnéticas de esta región del espectro se pueden transmitir aplicando la corriente alterna originada en un generador a una antena. En los últimos años se ha producido un fuerte desarrollo de las aplicaciones basadas en radio comunicaciones. Este desarrollo ha estado generado por importantes avances de miniaturización de los circuitos de radiofrecuencia y de los sistemas digitales, aprovechando la unión de ambas tecnologías. 3.1 Espectro radioeléctrico. El espectro radioeléctrico se trata del medio por el cual se transmiten las frecuencias de ondas de radio electromagnéticas que permiten las telecomunicaciones (radio, televisión, Internet, telefonía móvil, televisión digital terrestre, etc.), y son administradas y reguladas por los gobiernos de cada país. La definición precisa del espectro radioeléctrico, tal y como la ha definido la Unión Internacional de Telecomunicaciones (UIT), organismo especializado de las Naciones Unidas con sede en Ginebra, Suiza es: “Las frecuencias del espectro electromagnético usadas para los servicios de difusión y servicios móviles, de policía, bomberos, radioastronomía, meteorología y fijos.” Este “(…) no es un concepto estático, pues a medida que avanza la tecnología se aumentan (o disminuyen) rangos de frecuencia utilizados en comunicaciones, y corresponde al estado de avance tecnológico.” El espectro radioeléctrico se divide en bandas de frecuencia que competen a cada servicio que estas ondas electromagnéticas están en capacidad de prestar para las distintas compañías de telecomunicaciones avaladas y protegidas por las instituciones creadas para tal fin de los estados soberanos. Un repaso corto a las bandas de frecuencia nos indica que: 11 Banda UHF: En este rango de frecuencia, se ubican las ondas electromagnéticas que son utilizadas por las compañías de telefonía fija y telefonía móvil, distintas compañías encargadas del rastreo satelital de automóviles y establecimientos, y las emisoras radiales como tal. Las bandas UHF pueden ser usadas de manera ilegal, si alguna persona natural u organización cuenta con la tecnología de transmisión necesaria para interceptar la frecuencia y apropiarse de ella con el fin de divulgar su contenido que no es regulado por el Gobierno. Banda VHF: También es utilizada por las compañías de telefonía móvil y terrestre y las emisoras radiales, además de los sistemas de radio de onda corta (aficionados) y los sistemas de telefonía móvil en aparatos voladores. Es una banda mucho más potente que puede llegar a tener un alcance considerable, incluso, a nivel internacional. Banda HF: Tiene las mismas prestaciones que la banda VHF, pero esta resulta mucho más “envolvente” que la anterior puesto que algunas de sus “emisiones residuales” (pequeños fragmentos de onda que viajan más allá del aire terrestre), pueden chocar con algunas ondas del espacio produciendo una mayor cobertura de transmisión. 3.2 Frecuencia de transmisión. Con el término de frecuencia de portadora o simplemente frecuencia de transmisión, se hace referencia a la frecuencia de la señal radioeléctrica en ausencia de modulación. El valor de la frecuencia de portadora en una transmisión está determinado por el canal, el alcance deseado, la banda asignada, etc. En el caso de un sistema de radiocomunicaciones, que ha de compartir con otros sistemas el medio natural de propagación, la frecuencia asignada depende mucho de la aplicación, ancho de banda de la transmisión, alcance y cobertura deseadas. Actualmente se utilizan sistemas de radiocomunicaciones con frecuencias de portadora muy bajos (VLF), hasta infrarrojos, y para cada aplicación pueden definirse bandas más o menos óptimas. 12 3.3 Modulación de portadoras. Los sistemas de comunicaciones trabajan con información en forma de señales electrónicas que ocupan una banda limitada del espectro, por la naturaleza de la señal y por el filtrado previo a la transmisión. La transmisión de estas señales se puede realizar en banda base o modulando una portadora. Cuando se utiliza el canal radioeléctrico, es muy difícil la transmisión de señales en banda base. Primero porque el tamaño de las antenas debe ser, al menos, del orden de un cuarto de longitud de onda (λ/4 donde λ = c/f con c = 3·10^8 m/s) para que su eficiencia sea alta. Esta condición elimina la posibilidad de transmitir señales de frecuencia baja que aparecen en la banda base de muchos sistemas. Por otra parte, la banda relativa que puede transmitirse en un sistema dado suele ser pequeña (B/f <<1), limitando la banda en las portadoras de frecuencia más baja. En estas condiciones se hace imprescindible trasladar la información a otra zona del espectro diferente de la banda base, a través de los distintos tipos de modulación. 3.4 Modulación lineal. Se agrupa como modulación lineal a todos los procesos de modulación que satisfacen de forma estricta la condición de linealidad, es decir, que la señal obtenida al modular con la suma de dos señales corresponde a la suma de las señales obtenidas por modulación independiente con cada una de ellas. En particular se consideran las modulaciones que resultan de multiplicar la portadora por una función lineal de la señal de modulación. Esta modulación se caracteriza porque la potencia de la señal de salida depende de la potencia de la señal de entrada y, sobre todo, porque la banda final de la señal modulada no supera el doble de la frecuencia más alta de modulación, alrededor de la frecuencia portadora o frecuencia característica. Modulación ASK. En el caso de modulación ASK (Amplitude Shift Keying), la amplitud de la portadora se modula siguiendo la secuencia binaria, cambiando su valor de cero (correspondiente al cero lógico) a V voltios (correspondiente al 1 lógico). Así, la expresión de una señal modulada en ASK será: 13 El ancho de banda de una señal modulada en ASK es igual al régimen binario. Figura 3.1 Modulación ASK. 3.5 Transmisor y receptor de RF. Dentro de un sistema de comunicaciones se pueden distinguir dos subsistemas claramente separados: el transmisor y el receptor. El primero tiene como funciones principales la formación de la señal a transmitir o señal de banda base y la amplificación de la señal obtenida hasta el nivel de potencia deseado. 3.5.1 Tipos de transmisores. Se pueden distinguir dos conjuntos de transmisores según se realice la modulación sobre la frecuencia final de emisión (transmisores homodinos) o sobre una frecuencia intermedia (transmisores heterodinos). Transmisores homodinos o de modulación directa. En un transmisor homodino la modulación se realiza directamente sobre la portadora, de forma que la señal a la salida se filtra en la banda de transmisión y se envía a la antena. Aunque el transmisor homodino se utiliza para cualquier tipo de modulación, en la práctica es más frecuente verlo en modulación de amplitud. Esta coincidencia es debida a que la modulación directa de la portadora es más fácil en frecuencias bajas, 14 donde los moduladores son más fáciles de implementar, y las aplicaciones de AM son las que más se utilizan en esas frecuencias. Transmisores heterodinos. En un transmisor heterodino la portadora sobre la que se produce la modulación es de frecuencia diferente de la de emisión. La conversión de una frecuencia en otra se hace a través de un circuito, que, como se sabe, permite trasladar una señal en el espacio de la frecuencia un valor fijo, sin modificar el tipo y la profundidad de modulación. Por otra parte, el receptor debe separar la señal deseada del resto de las posibles interferencias y ruido electrónico, amplificarla y demodularla para obtener la señal original de banda base. 3.5.2 Tipos de receptores. Existen distintos criterios para clasificar los receptores; los más utilizados en la práctica son los que se refieren al tipo de servicio, a la forma de sintonía, al tipo de señal que reciben, a la forma de modulación y a la forma de separar la señal de las interferencias. Receptor hemodino. La señal captada por la antena se selecciona y se amplifica directamente hasta el nivel conveniente para que el demodulador funcione correctamente. Se demodula y a continuación se amplifica la señal extraída en la banda base original, hasta el nivel exigido por el dispositivo de representación. En la práctica este tipo de receptor es muy poco utilizado en sistemas de comunicaciones, dado los graves inconvenientes que posee a la hora de conseguir una buena selectividad por filtrado directo de la señal de RF, pues es muy difícil obtener filtros estrechos en RF que definan la banda de frecuencia deseada con precisión, sobre todo si el receptor es de sintonía variable. Por lo tanto, las aplicaciones quedan reducidas a receptores con una gran anchura de banda, normalmente para aplicaciones diferentes de la de comunicaciones, como radiometría, radar, etc., y que trabajan a una frecuencia fija. 15 Receptor superheterodino. En un receptor superheterodino la frecuencia de señal en RF se traslada, mediante mezcla con el tono puro y constante de un oscilador, a una frecuencia diferente (normalmente menor que la de RF), llamada frecuencia intermedia. En la frecuencia intermedia es donde se realiza el filtrado y selección de la banda deseada antes de alcanzar el detector. De este modo, la amplificación puede hacerse en dos etapas a frecuencias diferentes, logrando así una mayor estabilidad en el conjunto. 3.6 Codificador y decodificador. En un sentido general, se puede decir que un codificador es un circuito hecho para pasar información de un sistema a otro con clave diferente, y en tal caso un decodificador sería el circuito o dispositivo que retorne los datos o información al primer sistema. Debido a que el caso que nos ocupa es el de la lógica digital, y en especial la aritmética binaria, hemos de dar sentido más directo a los términos codificador y decodificador. Un codificador es un bloque combinacional hecho para convertir una entrada no binaria en una salida de estricto orden binario. En otras palabras, es un circuito integrado por un conjunto de componentes electrónicos con la habilidad para mostrar en sus terminales de salida un código binario (01101, 1100, etc.), equivalente al número presente en sus entradas, pero escrito en un código diferente. El decodificador es un circuito combinacional diseñado para convertir un código binario (entrada) en un número binario (niveles altos y bajos de voltaje) con un orden distinto, para ejecutar un trabajo especial. En otras palabras, el número binario que sale es diferente al código binario que entró, aunque tenga la misma cantidad de bits. Los decodificadores son también usados en los microprocesadores para convertir instrucciones binarias en señales de tiempo, para controlar máquinas en procesos industriales o implementar circuitos lógicos avanzados. Utilizaremos el codificador y decodificador recomendados por el fabricante del transmisor y receptor, estos son el codificador HT12E y el decodificador HT12D que permiten direccionar los datos y así evitar interferencias. Sus principales características 16 son: voltaje de operación: de 2.4 a 12 V, bajo consumo de energía y alta inmunidad al ruido (tecnología CMOS) y baja corriente en espera. 3.7 Antenas. Las antenas son las partes de los sistemas de telecomunicación específicamente diseñadas para radiar o recibir ondas electromagnéticas. También se pueden definir como los dispositivos que adaptan las ondas guiadas, que se transmiten por conductores o guías, a las ondas que se propagan en el espacio libre. Los sistemas de comunicaciones utilizan antenas para realizar enlaces punto a punto, difundir señales de televisión o radio, o bien transmitir o recibir señales en equipos portátiles. La misión de la antena es radiar la potencia que se le suministra con las características de direccionalidad adecuadas a la aplicación. Por ejemplo, en la radiodifusión o comunicaciones móviles se querrá radiar sobre la zona de cobertura de forma omnidireccional, mientras que en radiocomunicaciones fijas interesará que las antenas sean direccionales. 3.8 Parámetros fundamentales. La ganancia. La característica más importante de una antena es la ganancia. Esto viene a ser la potencia de amplificación de la señal. La ganancia representa la relación entre la intensidad de campo que produce una antena en un punto determinado, y la intensidad de campo que produce una antena omnidireccional (llamada isotrópica), en el mismo punto y en las mismas condiciones. Cuanto mayor es la ganancia, mejor es la antena. La unidad que sirve para medir esta ganancia es el decibelio (dB). Esta unidad se calcula como el logaritmo de una relación de valores. Como para calcular la ganancia de una antena, se toma como referencia la antena isotrópica, el valor de dicha ganancia se representa en dBi. 17 Relación de señal ruido. Siempre que se emite o se recibe una señal de radio, lleva acoplada una señal de ruido. Obviamente, cuanto menor sea la relación de ruido con respecto a la señal, más óptima se considerará la señal "valida". Incluso en las transmisiones digitales, se tienen que usar métodos de modulación que reduzcan el ruido y amplifiquen la señal de radio. El resultado de dividir el valor de la señal de datos, por la señal de ruido es lo que se conoce como relación señal/ruido. Cuanto mayor es, mejor es la comunicación. Se expresa en decibelios (dB), y en escala exponencial, lo que quiere decir que una relación señal ruido de 10 dB, indica que la señal es 10 veces mayor que la de ruido, mientras que 20 dB indica 100 veces más potencia. Potencia transmitida. Se utiliza la unidad dBm (decibelios relativos al nivel de referencia de 1 milivatio). 1 mW es igual a 0 dBm y cada vez que se doblan los milivatios, se suma 3 a los decibelios. La radiación máxima emitida por una antena (que puede terminar muy por encima de los vatios de entrada), que admite la FCC en los EEUU es de 1 vatio (equivalente a 30 dBm). En Europa, el límite es de 250 mW (24 dBm). 18 Capitulo 4. Diseño del sistema. En este capítulo se describirán las partes que componen el sistema, los componentes que utilizamos para simular el funcionamiento de cada una de las partes del sistema en nuestra maqueta y como se logra el encendido del automóvil a distancia. 4.1 Diagrama de bloques. En las siguientes figuras se muestra el funcionamiento del sistema dividido en dos bloques, el bloque transmisor compuesto por el pulso, el codificador y el transmisor; y el bloque receptor formado por el receptor, decodificador, transistor y relevadores conectados a la marcha, ignición y freno del automóvil. 4.2 Pulso. El circuito se activa con un pulso que activa la transmisión de datos, este pulso es generado desde el control remoto de la alarma. 19 4.3 Componentes. Dado que este proyecto va enfocado a reducir los costos de los sistemas similares existentes en el mercado, se utilizó el menor número posible de componentes, los que fueran más económicos y fáciles de conseguir, pero que al mismo tiempo brindaran el rendimiento necesario para el funcionamiento correcto del sistema. Para la comunicación, se encontraron módulos de radiofrecuencia en el mercado con su respectivo sistema de modulación y demodulación. 4.3.1 El codificador HT12E. Es un codificador que antecede al transmisor de ASK, el cual admite datos en paralelo y los envía en forma serial hacia el transmisor. Las entradas A0 – A7 son las selectoras de canal. El canal seleccionado en este decodificador debe de ser el mismo que el receptor. Las entradas AD8 – AD11 sirven para introducir la información en forma paralela al codificador. Cuando se mantiene en bajo la entrada TE (habilitación de la transmisión), el integrado transmite constantemente, repitiendo el código una y otra vez. En estas condiciones, si se modifica el valor de las entradas de datos se observa que el valor va cambiando en el receptor, por lo cual esta entrada se debe de dejar habilitada. Figura 4.3 Codificador HT12E. 4.3.2 Módulos de comunicación RF. Debido a que el medio de transmisión es un medio no guiado, es decir, no se encausan las ondas electromagnéticas a través de ningún elemento físico, el medio de propagación es el aire. Se elige una transmisión por radiofrecuencia, ya que permite un mayor alcance y al no tener un medio físico para la comunicación, le da una mayor movilidad al usuario. 20 Para la comunicación se utiliza una salida de datos de modo serial, porque maneja dos líneas de transmisión y para su utilización no requiere gran cantidad de elementos físicos. Este modo de transmisión maneja una codificación NRZ (no retorno a cero), es decir, cuando la línea de transmisión se encuentra sin uso permanece en estado alto, para iniciar una transmisión en este código se emplea una transición a cero como indicador de inicio y fin de transmisión. Transmisor TWS-434. Para realizar nuestra maqueta hemos elegido el transmisor TWS-434, ideal para la construcción de controles remotos, trabaja en la frecuencia de los 433.92 MHz y con modulación ASK, tiene un alcance de 120 m en exterior y 60 m en interior aproximadamente, lo cual consideramos suficiente para nuestro proyecto. El transmisor TWS-434 acepta entradas lineales y digitales, opera con una tensión que va desde 1.5 V hasta los 12 V-DC cuenta con una potencia de salida de hasta 8 mW. Figura 4.4 Transmisor TWS-434. En la figura 4.5 se muestra el diagrama del circuito transmisor de la señal de radiofrecuencia. Antena del transmisor. Estos módulos se utilizan frecuentemente con una antena mono polo omnidireccional, su longitud está determinada por λ/4, donde λ es la longitud de la señal de onda de la transmisión. 21 Figura 4.5 Diagrama del circuito transmisor de RF. Figura 4.6 Antena del transmisor. Antena del receptor. Para el bloque receptor se utiliza otro tipo de antena que permita reducir el tamaño del circuito para comodidad del usuario. Pueden utilizarse antenas de tipo helicoidal, aunque resulta menos eficiente que la anterior. 22 Figura 4.7 Antena del receptor. Receptor RWS-434. El receptor que hemos utilizado es el receptor RWS-434, también funciona en la frecuencia de 433.92 MHz y con modulación ASK, se alimenta con una tensión de entre 4.5 V y 5.5 V-DC, su sensibilidad es de 3μV y cuenta con salidas lineales y digitales. Figura 4.8 Receptor RWS -434. 4.3.3 El decodificador HT12D. Los pines A0-A7 son las selectoras de canal. Los pines AD8 a AD11 son las salidas paralelas de datos digitales. En el integrado decodificador HT12D, la señal VT significa Valid Transmission (Transmisión Válida), es decir, cada vez que esta señal va a un nivel alto es porque el código presente en la salida de datos es un dato válido para ese dispositivo. Si el dispositivo no cumple con la dirección que viene en la palabra que ha recibido, obviamente no se produce esta señal. Figura 4.9 Decodificador HT12D. 23 En la figura 4.10 se muestra el diagrama que se empleó para hacer la tablilla del circuito receptor de radiofrecuencia. Figura 4.10 Diagrama del circuito receptor de RF. 4.3.4 Transistor 2N2222. La función del transistor en el sistema es la permitir el paso de la señal de 5 volts ya que ha sido recibida y decodificada, para con ella alimentar el sistema de relevadores, también aquí es donde se incrementa el voltaje hasta los 12 volts necesarios para accionar los relevadores. Figura 4.11 Transistor 2N2222. 24 4.3.5 Relevadores. La gran ventaja de los relés electromagnéticos es la completa separación eléctrica entre la corriente de accionamiento, la que circula por la bobina del electroimán, y los circuitos controlados por los contactos, lo que hace que se puedan manejar altos voltajes o elevadas potencias con pequeñas tensiones de control, además con una sola señal de control, podemos controlar varios relés a la vez. Relevador RAS-1210. Es un relevador compacto de 1 polo, 2 tiros (SPDT) y bobina de 12 Vcc. Es ideal para equipos y proyectos electrónicos. Sus características técnicas son: - Contactos de aleación de plata - 24 Vcc / 10 A - 120 Vca / 10 A - 250 Vca / 7 A - Terminales de aguja - Dimensiones: 19,2 x 14,8 x 15,4 mm - Fabricado en plástico sellado con resina epóxica Figura 4.12 Relevador RAS-1210. 4.3.6 Módulo de relevadores. Este módulo se activa mediante la señal enviada desde el control remoto, y realiza la función que realizan ciertos circuitos digitales programables en los módulos que existen en el mercado, esto es, liberar determinados voltajes, hacia la marcha y el sistema de ignición para encender el automóvil, anteriormente se han mencionado las características que permiten a los relevadores realizar estas mismas operaciones, siendo su costo menor y su desempeño confiable. 25 El funcionamiento del arreglo de relevadores es muy sencillo, una vez recibida la señal necesaria y habiendo realizado las conexiones correctas, se desencadena una serie de cambios de estado en ellos, permitiendo que llegue el voltaje necesario hasta el sistema de encendido del automóvil. En la figura 4.10 se muestra el diagrama de las conexiones necesarias para lograr este propósito, cabe señalar que esta conexión puede ser modificada, se pueden agregar señales de seguridad según se desee, en el cofre o en la cajuela por ejemplo, en nuestro caso solo se ha implementado una señal de seguridad en el freno, incluso estas señales se pueden eliminar si así se desea. FRENO D1 PULSO DE LA ALARMA DIODE V1 12V RL5 RL4 L2 RL3 RL2 L1 12V IGNICION 12V MARCHA Figura 4.13 Diagrama del módulo de relevadores 4.4 Funcionamiento. Con este sistema se puede poner en funcionamiento el automóvil sin la necesidad de una interface y dependiendo de la conexión que realicemos y los relevadores que utilicemos será la seguridad que ofrezca el sistema, es decir puede llegar a tener las mismas funciones de la interface pero el tiempo de trabajo de la marcha será manipulado directamente por la señal del control de la alarma. (De un canal auxiliar). Para esto se debe de tener una alarma, con algún canal auxiliar disponible para realizar esta conexión. La señal de la alarma es recomendable que dure mientras este pulsado el botón del canal auxiliar así se podrá calcular tiempo de encendido; será como darle marcha pero a control remoto. Para esto debemos programar la alarma para que la señal del canal auxiliar dure mientras presionamos el botón, ya que hay señales que duran 2 o 3 segundos y algunos motores tardan un poco más en encender. 26 La señal del freno es solo por seguridad. Esto significa que si se omite aun así funciona la conexión. Una vez encendido, si se llega a presionar el freno se apagará el motor. La forma en que funciona este sistema es solo para hacer el encendido desde una distancia lejos del vehículo, una vez dentro del vehículo se inserta la llave y se gira hasta la posición de ignición sin dar marcha y así si se presiona el freno no se apagará el motor. Si el automóvil prende presionando el embrague, es porque cuenta con un dispositivo de seguridad instalado en la parte superior del pedal y para que el sistema funcione se debe de desactivar este interruptor, este se desactiva con solo hacer un puente entre los cables de este interruptor. O en caso de que se quiera dejar original se tiene que conectar la línea que va a la marcha a este mismo interruptor para que pueda encender el automóvil, esto si es una señal de corriente y si es una señal de tierra, se tendrá que instalar otro relevador para hacer el cambio de corriente a tierra. 4.5 Costos. Se llevó a cabo una investigación de campo en diferentes negocios dedicados a la instalación de alarmas automotrices en la localidad, de donde se obtuvo la información que se muestra en la tabla 4.1. Esta información sirvió de base para obtener el monto de ahorro en los costos del sistema desarrollado en el proyecto, en comparación con las opciones disponibles en el mercado. Los costos de los sistemas empleados en nuestra maqueta para lograr la comunicación entre la señal emitida por el control remoto y el arreglo de relevadores, no fueron considerados ya que una vez que se implemente el sistema en el automóvil estos circuitos no serán necesarios pues estas funciones son realizadas por la alarma instalada previamente. 27 Empresa Costo de una Costo de una Costo del alarma con alarma módulo función de sencilla arrancador encendido independiente automático. Bolt-Audio Desde $2514 Desde hasta $1131,20 hasta Fuentes. $5656,50 $2011,2 Express Desde Desde $ 850 $1382,70 hasta hasta $5028 $3393,90 Av. Valentín Av. Triunfo de la república. River’s Audio Systems Desde $1600 Desde $750 hasta $3500 hasta $1500 $755 $900 $880 Aguirre Laredo y El Portal Tabla 4.1 Precios de alarmas automotrices. *Precios en pesos mexicanos. **Los precios que nos fueron proporcionados en dólares se convirtieron a un tipo de cambio de $12.57 ***Todos los precios incluyen instalación. Como se puede observar de las opciones disponibles en el mercado la opción más económica sería adquirir la alarma sencilla más barata en River’s Audio Systems, con un precio de $750 pesos y agregarle el módulo arrancador más económico disponible en Bolt – Audio por $755 pesos. Esto nos representaría un gasto total de $1555 pesos. Como se mencionó anteriormente, en el desarrollo del módulo se tomará en cuenta únicamente el costo del arreglo de relevadores, y los aditamentos necesarios para conectarlo al automóvil, además del importe por la instalación. Los cuatro relevadores necesarios para implementar el sistema se pueden adquirir en electrónica Steren a un precio unitario de $41 pesos, esto representa un gasto de $164 pesos, además se necesitarán 16 terminales de latón tipo faston, hembra, se 28 recomienda usar las de forro completo para tener una mayor seguridad en las conexiones, estas terminales tienen un costo de $6 pesos por unidad, siendo el total de $ 96 pesos, a esto hay que sumar el costo del cable necesario, se recomienda usar cable estañado para conexiones calibre 22 AWG, con un costo de $5 pesos el metro, con dos metros será suficiente, lo que da un total de $10 pesos, Entonces sumando el costo de los componentes necesarios, la construcción del módulo requiere un gasto total de $ 270 pesos. El precio por instalación de un módulo semejante tiene un costo de $250 pesos en promedio, por lo que la construcción e implementación del módulo descrito nos representa un gasto total de $520 pesos. Esto arroja un ahorro de $235 pesos en comparación con la opción más económica encontrada en el estudio. 29 Capitulo 5. Resultados. Después de diseñar los circuitos necesarios, se procedió a armarlos físicamente, primero en una tablilla de pruebas, y una vez comprobado su correcto funcionamiento se hicieron los circuitos en tablilla impresa. Para diseñar las tablillas necesarias se utilizó el software LiveWire – PCB Wizard, que resultó de gran utilidad por su sencillez y eficiencia, aunque se experimentaron ciertas dificultades en el momento de elaborar las tablillas debido a la falta de experiencia y equipo necesario, al final se obtuvieron resultados satisfactorios, ya que ambos bloques efectuaron las funciones esperadas. Figura 5.1 Pruebas en protoboard. . Figura 5.2 Diseño de las tablillas. Una vez armadas las tablillas de transmisión y recepción, se realizaron las pruebas correspondientes; aunque el transmisor trabaja con un voltaje de entre 1.5 y 12 volts, el transmisor solo opera en rangos muy cercanos a los 5 volts, si se sobrepasa esta tensión el circuito se quema inmediatamente. En el caso del decodificador HT12D, no se deben usar las salidas para actuar algo directamente, se deben usar junto con la señal VT (transmisión válida) en alto. Para cumplir esto se puede colocar una compuerta AND o un circuito similar, que cumpla la misma función de una compuerta AND (un transistor y resistencias pueden servir). En este caso se implementó un 30 transistor 2N2222 con una resistencia de 330 Ohms para poder activar el módulo de arranque. Figura 5.3 Tablillas impresas. Después de probar las primeras tablillas en conjunto con el módulo de encendido, se experimentaron problemas pues el pulso emitido por el transistor es un nivel lógico alto y los relevadores se accionan mediante un nivel lógico bajo, para solucionar este problema se agregó otro relevador a la señal que es enviada por el emisor del transistor, de este modo se logró un cambio de estado en la señal para poder accionar los relevadores. Figura 5.4 Relevador adicional. Una vez resueltos estos problemas en los bloques componentes del sistema se probó la maqueta y se obtuvo un resultado satisfactorio. 31 Capitulo 6 Conclusiones y recomendaciones. Después de llevar a cabo el diseño e implementación de los circuitos necesarios para el proyecto y realizar las pruebas pertinentes se obtuvo el resultado esperado, esto es, el módulo cumple con la función de enviar los voltajes requeridos para poner en marcha el automóvil. La señal de seguridad que se puso en el freno también cumple su cometido, una vez encendido el vehículo, si se presiona el freno, el motor se apagará siempre que no se haya introducido la llave en la ignición. También se comprobó que la construcción e instalación del módulo resulta más económica que las opciones similares disponibles en el ramo de las alarmas automotrices. Se observaron como desventajas del sistema en comparación con los sistemas existentes que una vez encendido el automóvil, no es posible apagarlo desde el control remoto, además el automóvil permanecerá encendido hasta que se apague manualmente desde el interior del automóvil. Por lo que se podrán implementar mejoras en este sentido en el futuro. 32 Referencias. [1] Leo G. Sands, “Sistemas electrónicos de seguridad”, Diana, México, segunda edición.1979. [2] Manuel Sierra Pérez, et al, “Electrónica de Comunicaciones”, PEARSON, España. 2003. [3] Ángel Cardama Aznar, et al, “Antenas”, Alfaomega, México, 2004. [4] http://www.the12volt.com/relays/relays.asp [5] http://www.unicrom.com/Tut_diodo.asp [6] http://www.unicrom.com/Tut_transistor_bipolar.asp [7] http://www.rentron.com/PicBasic/RemoteControl.htm [8] http://robots-argentina.com.ar/Prueba_RFLink.htm 33 Apéndice A. Codificador HT12E. 34 35 36 37 Apéndice B. Transmisor TWS-434. 38 39 Apéndice C. Receptor RWS-434. 40 41 42 Apéndice D. Decodificador HT12D. 43 44 45 46 47 Apéndice E. Transistor 2N2222. 48 49 50 51 52 Apéndice F. Relevador RAS-1210. RAS - RELEVADOR COMPACTO DE 1P/2T CARACTERISTICAS 53 Seguridad aprobada UL, CUR y TUV Corriente alta disponible arriba de 15 A, y uno especial de 20 A para uso en automóviles. Tipo de sello epóxico y libre de flux. Satisface todos los requerimientos de uso en automóviles y aplicaciones eléctricas en casa. Voltaje Nominal (VDC) Resistencia de la Bobina (Ω) (+/- 10%) 69 Ω 100 Ω 225 Ω 400 Ω 1600 Ω 5V 6V 9V 12 V 24 V Consumo de Energía (W) 0.36W ITEM Resistencia de Contacto Corriente Nominal (mA) (+/- 10%) 72mA 60mA 40mA 30mA 15mA TIPO Voltaje para el Accionamiento (VDC) Voltaje de Ruptura (VDC) Voltaje Máximo Permitido (VDC) 10% Min. 130% 75% Max. 10 A 15 A 50mΩ Máx. (valor inicial) Tiempo de Operación 10mseg Máx. Tiempo de liberación 5mseg Máx. Fuerza del Dieléctrico Entre bobina y contacto Entre contacto 20 A AC 1500V (1min) AC 750V (1min) 100MΩ Min. (DC 500V) Resistencia de aislamiento -30°C ~ +80°C Temperatura de Operación Ambiente 35% to 85% RH Humedad Resistencia de Vibración 10G (10~55Hz) (Amplitud dual:1.5mm) Resistencia de Choque 10G Expectativa de Vida Peso Mecánicamente 10,000,000 ops. min. (1800 ops./h) Eléctricamente 100,000 ops. Min. (1200 ops./h) 9.5g(aprox.) 54 ITEM TIPO Promedio de Corriente Transmitida 10 A AC 120V 10A AC 250V 7A DC 24V 10A Corriente Máx. Permitida Voltaje Máx. Permitido 15A Corriente Máx. (continua) Material de Contacto 10A 15 A AC 120V 15A AC 250V 7A DC 24V 10A 15A AD 240V DC 110V 15A Aleación de plata 20 A AC 120V 10A AC 250V 7A DC 24V 10A 15A 20ª 55