Use of Extended Adaptive Decision Tables on Reconfigurable
Anuncio

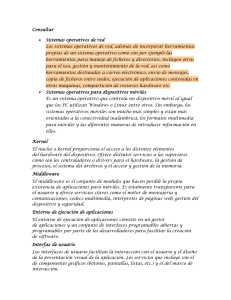
IEEE LATIN AMERICA TRANSACTIONS, VOL. 12, NO. 7, OCTOBER 2014 1325 Use of Extended Adaptive Decision Tables on Reconfigurable Operating Systems S. M. Martin, G. E. De Luca, and N. B. Casas 1 Abstract— Throughout the last decades, many reconfigurable operating systems have been developed in order to let users and programmers make decisions upon the configuration of some of the innermost kernel’s aspects. These decisions, however, require an advanced level of skill in order to obtain some performance advantage. Furthermore, they can be detrimental to the system’s performance if they are not careful taken. Letting the kernel itself do the decision-making upon the implementation of its aspects is a safe and powerful way to manage re-configurability that does not require interaction with the user nor the need of advanced skills to take advantage of. In this article, we propose the usage of Extended Adaptive Decision Tables as a mean for the kernel to achieve the capability of taking intelligent decisions based solely on the users’ process creation behavior. Keywords— Decision Tables, Operating Systems, Adaptive Device L I. INTRODUCCIÓN OS SISTEMAS operativos han sido desarrollados y utilizados por décadas para abstraer tanto a los usuarios finales como a los programadores de aplicaciones de la complejidad del hardware subyacente. A través de ellos, la computadora y sus componentes pueden ser vistos como recursos administrables que los usuarios y sus aplicaciones pueden solicitar y utilizar. La lista de recursos administrados por un sistema operativo incluye, pero no se limita a: uso del procesador, distribución de la memoria, permisos para entrada/salida, y operaciones en dispositivos físicos o virtuales, entre otros. Los primeros sistemas operativos comerciales, como MSDOS, sólo permitían la ejecución de un único proceso en simultáneo. Por esa razón, las funciones de su kernel estaban limitadas solamente a inicializar, proveer una línea de comandos, y algunos servicios básicos. Al ejecutar un proceso, éste toma el control completo del procesador, la memoria y los dispositivos, mientras que el kernel no tiene ninguna responsabilidad administrativa sobre ellos. Con el desarrollo de sistemas operativos tipo UNIX más avanzados que permitían la ejecución de más de un proceso al mismo tiempo y el uso simultáneo de varios usuarios, surgieron nuevos desafíos. El problema de qué procesos o usuarios debían tener mayor uso de procesador, o contar 1 S. M. Martin, Departamento de Ingeniería e Investigaciones Tecnológicas, Universidad Nacional de La Matanza. Buenos Aires, Argentina, smartin@ing.unlam.edu.ar G. E. De Luca, Departamento de Ingeniería e Investigaciones Tecnológicas, Universidad Nacional de La Matanza. Buenos Aires, Argentina, gdeluca@ing.unlam.edu.ar N. B. Casas, Departamento de Ingeniería e Investigaciones Tecnológicas, Universidad Nacional de La Matanza. Buenos Aires, Argentina, ncasas@ing.unlam.edu.ar segmentos más grandes de memoria fue abordado de manera diferente por los distintos desarrolladores de sistemas operativos. Hoy en día, la diversidad de posibilidades para la administración de recursos entre diferentes sistemas operativos provee a los usuarios y empresas con una gama de productos específicos para cada necesidad de administración. La mayoría de los sistemas operativos de acceso público no son reconfigurables. Esto significa que sus políticas administración de los recursos están predefinidas y no pueden ser cambiadas por los usuarios. Utilizaremos la nomenclatura utilizada en nuestro trabajo previo [1] en el que el uso del procesador, la administración de la memoria, y el manejo de otros recursos son llamados aspectos del sistema operativo. Cada uno de estos aspectos puede ser administrador utilizando una política o modo. Un sistema operativo es llamado reconfigurable cuando uno o más de sus aspectos pueden cambiar de modo en tiempo de ejecución, sin necesidad de reiniciar. A pesar de que casi todos los requerimientos para sistemas operativos comerciales y hogareños pueden ser satisfechos con kernels convencionales (no reconfigurables), existen beneficios potenciales para la capacidad adaptativa de un kernel reconfigurable. Algunos ejemplos de sistemas operativos reconfigurables, como Kea [2] y Synthetix [3], han mostrado mejores resultados que sus contrapartes comerciales en pruebas conducidas sobre condiciones de ejecución y comportamiento de procesos cambiantes. Otros, como SPIN [4], proveen una interfaz de extensión para que el mismo programador pueda desarrollar nuevos modos para los aspectos del kernel. Todos los sistemas operativos reconfigurables disponibles – listos para usar, sólo en código fuente, o sólo en bibliografía académica – dependen de que el usuario/programador decida tanto qué cambios realizarle a la configuración del kernel, como cuándo hacer esos cambios. En la mayoría de los casos, esto es logrado mediante el uso de una interfaz kernel-proceso basada en un modelo de objetos [5] que presenta la funcionalidad de un cierto aspecto, y permite al programador definir qué instancia de una clase llega a ejecutarlo. A pesar de la gran flexibilidad y potencial adaptativo que puede ser obtenido por el método de interfaces, sus limitaciones pueden ser frecuentemente suficientes para evitar que usuarios, programadores, o incluso diseñadores de sistemas operativos la usen. Por un lado, le tomaría a un programador conocer al menos algo sobre la implementación del kernel para poder obtener alguna ventaja. Algunos programadores deberían incluso investigar sobre el kernel previamente para saber qué aspectos cambiar y cuándo cambiarlos. Por otro lado, programas legados, estándar, o reutilizados no tendrían la oportunidad de aprovechar sus beneficios. Ellos podrían necesitar un proceso de reingeniería antes de que puedan ser capaces de utilizar las interfaces de reconfiguración adecuadamente. Los usuarios finales con programas propios no podrían ni siquiera tener una oportunidad de utilizar el potencial subyacente del kernel reconfigurable. En este artículo presentamos un punto de vista diferente para permitir la reconfiguración de un kernel. En este enfoque, la responsabilidad de decidir qué cambios realizar en la configuración de los aspectos del kernel cambiar recae sobre el sistema operativo, y no sobre los usuarios/programadores. Las tres razones principales para soportar esta idea son: Primero, los desarrolladores del kernel ya cuentan con todas las habilidades y conocimiento de las complejidades de sus aspectos y modos. Ellos pueden diseñar mejores mecanismos para el cambio de modos de tal manera que no se requiera un conocimiento específico de parte de los usuarios y programadores. Segundo, todas las aplicaciones pueden ser ejecutadas de manera agnóstica de la capacidad reconfigurable del kernel, y aun así aprovechar sus beneficios. Por último, el kernel puede tomar decisiones tomando en cuenta indicadores más complejos de los que un programador podría tener en cuenta. Algunos de ellos serían incluso inaccesibles para los procesos en tiempo de ejecución, y otros podrían ser muy complejos o específicos para que el programador los considere. En este trabajo utilizamos Tablas de Decisión Adaptativas Extendidas – de aquí en adelante abreviadas como EADTs – como un dispositivo que nos permitirá a nosotros, como diseñadores de sistemas operativos, otorgarle al kernel un mecanismo para la toma de decisiones basadas en el comportamiento de sus usuarios. Todo el análisis y ejemplos presentados en este artículo fueron conducidos sobre SODIUM (Sistema Operativo del Departamento de Ingeniería de la Universidad Nacional de La Matanza. El proyecto SODIUM comenzó en 2005 con el objetivo de permitirle a los alumnos de sistemas operativos tener la oportunidad, no sólo de entender los conceptos teóricos, pero también de involucrarse activamente en el desarrollo de un kernel. Al final de cada año, todas las prácticas son evaluadas, y los mejores trabajos son integrados al kernel para que los alumnos del siguiente semestre lo utilice. Web: http://www.so-unlam.com.ar/), un proyecto para un sistema operativo reconfigurable académico [6] [7] y, más específicamente, su aspecto reconfigurable de planificación de procesos. El resto de este artículo se organiza de la siguiente manera: la sección II introduce el aspecto reconfigurable de planificación de procesos de SODIUM. En la sección III, dicho aspecto es analizado para obtener un criterio de toma de decisiones necesario para construir la tabla de decisión inicial que será presentada en la sección IV. En la sección V se explica qué elementos adaptativos fueron utilizados para obtener una tabla de decisión adaptativa, En la sección VI, analizamos el mecanismo extendido que permite definir múltiples criterios para la toma de decisiones para generar la tabla de decisión adaptativa extendida final. En la sección VII indicamos las IEEE LATIN AMERICA TRANSACTIONS, VOL. 12, NO. 7, OCTOBER 2014 pruebas realizadas y los resultados obtenidos con el método presentado. Finalmente, en la sección 7 se discuten trabajos futuros y las conclusiones de nuestra investigación. II. PLANIFICADOR DE PROCESOS RECONFIGURABLE SODIUM A pesar de que este artículo presenta una propuesta general para la toma de decisiones sobre reconfigurabilidad de un kernel utilizando EADTs, es necesario y mucho más fácil explicar su implementación sobre un aspecto reconfigurable existente como base. No hay otro aspecto reconfigurable en SODIUM que haya sido más refinado e investigado que el planificador de procesos. Éste cuenta con 6 diferentes modos disponibles: Round-Robin (RR), Round-Robin con colas de prioridad (RRPR), Round-Robin con quantum variable (RRQV), FirstCome-First-Serve (FCFS), Shortest-Finishing-Job-First (SJFS), y Best-Time-Of-Service (BTS). La mayoría de estos modos han sido especificados como estándares en la bibliografía existente sobre sistemas operativos. Nosotros hemos utilizado una especificación general [8] como base para su implementación. Este aspecto tiene la particularidad de que todos sus 6 modos pueden ser intercambiados a cualquiera de los otros sin limitaciones, en tiempo de ejecución. Esto significa que este aspecto cuenta con 30 transiciones diferentes para implementar. Cada transición esta implementada como un grupo de funciones que efectúan los cambios necesarios para su reconfiguración. En la Tabla I, se indica qué grupo de funciones ejecuta el kernel de SODIUM – todas ellas son conmutativas – para lograr cambiar un modo de planificación a otro en tiempo de ejecución. Este es un paso necesario para permitirle al kernel reconfigurarse de manera autónoma, y debe ser diseñado por los desarrolladores del sistema operativo. Las acciones han sido codificadas como letras para ilustrar indicar qué transiciones se ejecutarán según las condiciones dadas en las tablas de decisión mostradas en este artículo, mientras que la transición 0 indica que ninguna acción se debe efectuar. Esta tabla será utilizada nuevamente en la sección VI, cuando nuevas reglas se agreguen para contemplar nuevas condiciones de ejecución. TABLA I. TRANSICIONES ENTRE MODOS Y SUS ACCIONES. Siguiente Modo RR Modo Actual 1326 RR RRPR RRQV FCFS SJFS BTS 0 f k o t v RRPR RRQV FCFS a 0 l p p w b g 0 q q x c h m 0 u y SJFS BTS d i n r 0 z e j ñ s s 0 A pesar de que esta tabla de transiciones-acciones le permite al sistema operativo por sí mismo saber qué acciones tomar para realizar una transacción, no es suficiente todavía para permitirle tomar decisiones sobre qué transiciones ejecutar, ni cuando tomarlas. Contar con esta relación entre MARTIN et al.: USE OF EXTENDED ADAPTIVE DECISION transiciones y acciones es el primer paso para generar una tabla de decisión convencional – de ahora en adelante, abreviada como cTD –. La cTD contendrá el primer mecanismo de condición-acción que le permitirá al kernel tomar decisiones autónomamente. III. CRITERIOS PARA TOMA DE DECISIONES Para que una tabla de transiciones-acciones, como la obtenida, le permite a un kernel tomar decisiones autónomamente, necesitamos definir dos nuevos elementos clave: condiciones, que van a indicar qué reglas – como sinónimo de transición – se deben ejecutar en un cierto momento; y eventos, que indican cuándo se deben evaluar las condiciones. Los eventos por sí mismos también pueden ser considerados condiciones, porque si no ocurren, ninguna de las reglas asociadas a ellos se ejecutará. Sin embargo, desde un punto de vista de los sistemas operativos, la distinción es importante. Los eventos se codifican como funciones de gatillo puestas en diferentes partes del kernel, mientras que las condiciones se evalúan únicamente si se recibe un evento. En el caso del planificador de procesos de SODIUM, los eventos se dispararán cada vez que un proceso sea creado, eliminado, interrumpido, o liberado. Esto incluye interrupciones de hardware/software, syscalls, solicitudes y respuestas de E/S, y rutinas de comunicación entre procesos. Definir condiciones como tales puede ser más difícil. Para definir qué condiciones de ejecución requerirán un cambio de modo, debemos evaluar tres aristas diferentes de la planificación de procesos: métricas de planificación, categorías de aplicación, y relaciones de algoritmos-métricas. A. Métricas de Planificación El planificador de procesos de SODIUM cuenta con un conjunto de 7 métricas para evaluar y reportar el rendimiento de cada algoritmo (modo) de planificación. Estas métricas están basadas en la lista presentada en [8]. Aquí se muestra una breve explicación para cada una: • Uso del Procesador ( % cpu ) indica el radio entre el tiempo que el procesador está ejecutando un proceso, y el que pasa en estado libre (idle) o en operaciones de overhead. • Rendimiento ( # f ) indica la cantidad de procesos que han finalizado dado un diferencial finito de tiempo. • Tiempo de Finalización ( t cv ) indica el tiempo que le toma a un proceso ejecutar por completo, desde que es creado hasta que termina. Esto incluye el tiempo esperando por memoria u operaciones de E/S. • Tiempo de Espera ( t w ) indica el tiempo total de espera del proceso durante toda su ejecución, desde que es creado. Esto no incluye E/S ni syscalls. 1327 • Tiempo de Respuesta ( t r ) indica el tiempo promedio que, para cada proceso que ha solicitado una operación, ésta es completada. • Tiempo efectivo de Servicio ( t s ) Indica la suma del tiempo que el proceso ha pasado en ejecución en el procesador. • Overhead (Ov) indica el tiempo que el procesador pasa ejecutando rutinas de administración de sistema. B. Categorías de Aplicaciones Dado que no es posible conocer exactamente qué acciones y servicios serán ejecutados por una aplicación de usuario antes de que ejecute por completo, la única manera de estimar su futuro comportamiento es intentar perfilarla dentro de una categoría bien conocida. Nos enfocamos en la técnica de perfilado presentada en [9] basada en la frecuencia de llamado a system calls, y la mantención de información particular por proceso, como la especificada para el sistema operativo Solaris en [10]. En SODIUM, los procesos en ejecución caen, luego de un corto período de tiempo, en alguna de las siguientes categorías: Aplicaciones de Interacción Intensiva (II), como juegos o líneas de comando; Aplicaciones Multimedia (M), como herramientas de edición de video y audio; Aplicaciones de E/S Intensiva (ES), como grabadores de DVD o transferencia de datos; Aplicaciones Internet (WEB), como navegadores o programas de red; Aplicaciones de Procesamiento Intensivo (P), como compiladores o programas científicos; y Aplicaciones de Sistema (S), como servicios o programas de mantenimiento. Luego de conducir una batería de pruebas sobre aplicaciones siendo categorizadas, pudimos establecer qué métricas son más importantes para cada categoría, como se muestra en la Tabla II. TABLA II. MÉTRICAS DE ALTA PRIORIDAD PARA CADA CATEGORÍA. Categorías Aplicaciones de Interacción Intensiva (II) Aplicaciones Multimedia (M) Aplicaciones de E/S Intensiva (ES) Aplicaciones Internet (WEB) Aplicaciones de Procesamiento Intensivo (P) Aplicaciones de Sistema (S) Métricas Tiempo de Respuesta Tiempo de Espera Tiempo de Espera Uso del Procesador Rendimiento Tiempo de Respuesta Tiempo Efectivo de Servicio Tiempo de Respuesta Tiempo de Finalización Rendimiento Overhead 1328 IEEE LATIN AMERICA TRANSACTIONS, VOL. 12, NO. 7, OCTOBER 2014 C. Relaciones entre Métricas y Algoritmos Dado que ahora contamos con la posibilidad de encasillar una aplicación dentro de una categoría, mantener métricas de planificación, y saber aproximadamente qué métricas favorecen cada categoría, sólo nos queda determinar qué algoritmos de planificación (modos) favorecen dichas métricas. Hemos encontrado alguna de estas relaciones algoritmométrica ya documentadas en bibliografía existente [8]. Sin embargo, hemos conducido pruebas de control para confirmarlas, y también determinar aquellas que no estaban contempladas. Por ahora, contemplaremos el caso de múltiples categorías utilizando directamente el algoritmo de planificación RoundRobin que es el que mejor ha respondido en general para todas las métricas de planificación durante las pruebas realizadas. Los escenarios mono, multi y los de categoría única pueden ser interpretados en una tabla de decisión como condiciones que, sin contemplar la capacidad de que dos puedan cumplirse al mismo tiempo, pueden determinar qué algoritmo será mejor utilizar en cada caso. Además, de la Tabla I podemos determinar qué acciones ejecutar para realizar las transiciones de un modo a otro. TABLA III. TABLA DE DECISIÓN CONVENCIONAL (CDT) PARA EL PLANIFICADOR DE PROCESOS DE SODIUM. Reglas 1 R R Condiciones Modo Actual Aplicaciones en ejecución Acciones Mono II M ES WEB P S Multi x a 1 1 1 0 1 2 R R R R P P P P P Q Q R R R R R R R R R V V x x x x x x x x x x x x x x x b c d e f g h i j k l 2 3 4 5 6 7 8 9 IV. TABLA DE DECISIÓN CONVENCIONAL La información obtenida en las pruebas realizadas es suficiente para determinar qué algoritmo de planificación utilizar cuando todos los procesos en ejecución pertenecen a la misma categoría. Sin embargo, este escenario no cubre todas las posibilidades de ejecución. Podría existir un escenario en el que sólo exista un proceso en la cola de listos. Este caso podría ser significativo en sistemas de procesamiento en lote. Utilizar un algoritmo costoso en overhead en dichos casos no es conveniente, ya que, al no haber más procesos, el sistema debería interferir lo menos posible. Por lo tanto, podemos establecer que, en el caso de mono-procesamiento (mono), el algoritmo a utilizar será el de FCFS, que no es expropiativo. Adicionalmente, un escenario más común es que diferentes procesos de diferentes categorías intenten ejecutar concurrentemente. En este caso, utilizar algoritmos que respondan a una única categoría según la Tabla II, podría ser perjudicial para el rendimiento general. Esto se debe a que estaríamos utilizando sólo una heurística simple e información empírica para determinar el mejor algoritmo en escenarios complejos. De hecho, existen 720 combinaciones diferentes de escenarios en ejecución simultánea. Esta complejidad no puede ser manejada a priori, tan solo analizando cada categoría por separado. Este es el escenario denominado multi-categoría (multi) que será resuelto luego utilizando la capacidad de auto-modificación de una tabla de decisión adaptativa. 1 3 Q V x 1 4 Q V 1 5 Q V 1 1 1 1 2 6 7 8 9 0 F F F F F C C C C C 2 1 S J 2 2 S J x 2 3 S J 2 5 S J x x x x x x x x 2 2 2 2 3 6 7 8 9 0 B B B B B T T T T T x x x x x x x x m n 2 4 S J x x ñ x o p q r s x t p q u x s x v w x y z Por lo tanto, ya contamos con todos los elementos para construir la tabla de decisión convencional inicial (cDT), para que el planificador de procesos del kernel de SODIUM pueda decidir qué algoritmo utilizar dependiendo de las aplicaciones siendo ejecutados, y además qué funciones ejecutar para cambiar entre un modo y otro. Dicha tabla consiste en un conjunto de 30 reglas que combinan las condiciones dadas – modo actual y aplicaciones en ejecución– y sus acciones correspondientes. La cDT inicial para el planificador de SODIUM puede ser vista en la Tabla III. V. TABLA DE DECISIÓN ADAPTATIVA A. Mecanismo adaptativo Para poder contemplar nuevas reglas para escenarios complejos, tales procesos de categoría II y M ejecutándose simultáneamente, debemos agregar mecanismos adaptativos a la cDT estática obtenida previamente, para transformarla en una tabla de decisión adaptativa (aDT). La definición formal de una aDT [11] [12] requiere la especificación de una cDT base tal como la obtenida en la Tabla III, y también la adición de funciones adaptativas para realizar consultas, eliminaciones, e inserciones automatizada sobre las reglas de la tabla. En este trabajo utilizamos un mecanismo adaptativo simple que consiste en el uso de dos funciones adaptativas simples. Una es utilizada para verificar la existencia de reglas que contemplen el escenario complejo en ejecución. La otra es utilizada para agregar una nueva regla, si es que no existe una MARTIN et al.: USE OF EXTENDED ADAPTIVE DECISION para el escenario detectado. Estas funciones adaptativas, llamadas Ad1, y Ad2, se ejecutan antes y después de la ejecución de las reglas de la tabla propiamente dichas, respectivamente. Ad1 sólo define el valor de la variable estado a D (determinado) si existe une regla que pueda contemplar las condiciones actuales del escenario. Cuando ninguna regla existente contempla las condiciones actuales, una nueva regla (31) se encarga de definir la variable estado a ND (no determinado). En el siguiente paso, si el valor de la variable estado es igual a ND, una nueva regla (32) ejecuta la función adaptativa Ad2. La función Ad2 se encarga de agregar 6 nuevas reglas a la tabla de decisión. Estas nuevas reglas se encargarán de contemplar el caso actual en futuras ejecuciones. El resultado de esto es que, en cualquier momento en el futuro en el que se repitan las mismas condiciones, existiría una transición hacia el modo en que esas condiciones fueron contempladas inicialmente. La lógica de esto es que, cuando un nuevo conjunto de condiciones es encontrado, es probablemente porque un nuevo proceso de una categoría diferente a los que se encuentran en ejecución es creado. Por lo tanto, se sigue manteniendo el mejor planificador para las aplicaciones que ya estaban creadas. Al hacer esto, se intenta mantener los beneficios del planificador en ejecución para los procesos ya activos. La implementación de las nuevas reglas 31 y 32, y las funciones adaptativas Ad1 y Ad2 pueden ser vistas en la Tabla V. La acción que será ejecutada por cada nueva regla está dada por la función $m que toma el modo actual de la regla, y el escenario actual como parámetros para definir una acción específica. El resultado de definir qué acción realizar según los modos detectados se obtiene de los valores de $m mostrados en la Tabla I. Las funciones adaptativas crearán nuevas reglas para casos particulares en los que, por ejemplo, condiciones de categoría (M) y (S) se detectan simultáneamente. En ese caso, 6 nuevas reglas se crearán para contemplar esa combinación de condiciones con 6 posibles modos actuales que serán agregadas a la cDT subyacente. A pesar de ser un mecanismo simple, esto le permite a la tabla de decisión aprender del comportamiento del usuario, y convergir hacia una tabla de decisión completa con 720 reglas diferentes, para cada usuario. Por otro lado, muestra algunas limitaciones debido a que, una vez creadas, no pueden ser modificadas si el usuario muestra un comportamiento diferente en ejecuciones sucesivas. Tampoco provee la habilidad de contemplar más criterios (métricas) en el proceso de toma de decisiones. Estos problemas son abordados utilizando las extensiones a la aDT mostrados en la siguiente sección. VI. TABLA DE DECISIÓN ADAPTATIVA EXTENDIDA La aDT obtenida en la sección previa permite la creación de nuevas reglas que contemplan condiciones que no fueron incluidas en la cDT original. Sin embargo, el único criterio utilizado para determinar las acciones de transición de modo 1329 fueron aquellas que mantienen el primer modo original. Este criterio no contempla el uso de indicadores de rendimiento – como las métricas definidas en la Tabla II – ni un mecanismo para modificar las reglas ya creadas. Por lo tanto, es necesario extender la definición de la aDT para poder incluir funciones específicas que puedan decidir qué algoritmo utilizar basándose en la relación entre las categorías de procesos y las métricas mantenidas. Recurriremos a la definición formal de una Tabla de Decisión Adaptativa Extendida (EADT) [13] [14] en el que múltiples criterios pueden ser definidos para determinar la mejor decisión posible. Este definición parte de una aDT base tal como la definida en la sección anterior a la que se le agregan funciones auxiliares que se ejecutan antes que la acción definidas por las regla seleccionada, y definen valores para variables que serán tomadas en cuenta luego para la toma de decisiones. En nuestro caso, definimos el modo destino como parámetro para la función $m usando las métricas definidas en la sección III. En [13], se indica que es necesario elaborar una matriz Z de preferencia por cada combinación de criterios (métricas) y alternativas (algoritmos de planificación), usando la escala fundamental de Saaty [15] para comparar la importancia relativa de cada criterio con cada categoría de aplicación. Por otro lado, podemos ajustar la importancia de cada criterio teniendo en cuenta la cantidad de procesos de cada categoría que se encuentran listos para ejecutar. Por ejemplo, para un escenario en el que 2 procesos de categoría (II), y uno de categoría (S) están listos, la importancia de las métricas tw y tr será el doble de la definida para la métrica ov. TABLA IV. MATRIZ Z DE PREFERENCIA CRITERIO/ALTERNATIVA. Preferencia de Criterio Categoría %cpu #f tcv tw tr ts ov Multiplicador RR RRPR RRQV FCFS SJFS BTS x1 0,35 0,35 0,12 0,06 0,06 0,06 x1 0,13 0,13 0,13 0,13 0,38 0,13 x1 0,05 0,15 0,30 0,30 0,30 0,05 x6 0,18 0,54 0,02 0,02 0,02 0,06 x6 0,16 0,16 0,02 0,02 0,02 0,16 x1 0,23 0,03 0,03 0,03 0,03 0,68 x3 0,15 0,15 0,45 0,45 0,05 0,05 Preferencia Total 0,17 0,28 0,25 0,11 0,06 0,13 Para el ejemplo anterior, una matriz Z normalizada de preferencias de criterios para cada alternativa es ilustrada en la Tabla IV. Puede verse en esta tabla que, para el ejemplo, se podrían obtener mejores resultados utilizando el algoritmo RRPR, que obtiene una preferencia ligeramente mayor que la del algoritmo RRQV. La matriz Z se regenerará completamente basada en la cantidad y categoría de los procesos listos para ejecutar cada vez que alguna función adaptativa llame a una función llamada z_gen(). Otra función z_get() que se utilizará para obtener el algoritmo preferido dada la matriz generada. Sólo será necesario agregar llamadas a las funciones z_gen() y z_get() junto con una nueva variable m para guardar el valor obtenido. En la Tabla V se muestra la forma final de 1330 IEEE LATIN AMERICA TRANSACTIONS, VOL. 12, NO. 7, OCTOBER 2014 ejecución. Inicialmente, cada recorrido crea dos procesos de una categoría, evalúa las métricas, y crea otros dos nuevos procesos de otra categoría, hasta llegar a los 12 procesos simultáneos, con los que completa todas las categorías. Los caminos de cada recorrido se especifican en la Tabla VI. la tabla de decisión adaptativa extendida implementada en el planificador de procesos de SODIUM. TABLA V. TABLA DE DECISIÓN ADAPTATIVA EXTENDIDA IMPLEMENTADA EN SODIUM. Declaraciones de Funciones Adaptativas Ad1 Modo Actual Estado Condiciones Funciones de Preferencia Acciones + P R + Q V + F C + S J + B T C1 C2 C3 C4 C5 C6 C1 C2 C3 C4 C5 C6 C1 C2 C3 C4 C5 C6 C1 C2 C3 C4 C5 C6 C1 C2 C3 C4 C5 C6 C1 C2 C3 C4 C5 C6 II M ES WEB P S z_gen() z_get() func() Ad1 Ad2 m 0 1 2 3 H ? H + R R A … S R R R R R R R … R R R … - x - … x - - … - - - … - - - … - - x … - - - … Reglas 2 2 2 6 7 8 R R R F S S C J J x - x - 2 9 R B T - - - x - - x - 3 3 3 3 0 1 2 3 R R R E B T N x x m y N $m $m $m $m $m $m 0 a b d … … q q u x x x x x x x x D Estado= Funciones Adaptativas Variables Ad2 x x x x x x x x B V VII. PRUEBAS Y RESULTADOS El objetivo de las pruebas a realizar es medir la eficiencia de la decisión sobre qué modo (algoritmo) utilizar para la planificación de procesos de cada una de las estrategias expuestas en este trabajo. Para ello, se elaboraron tres versiones diferentes del planificador de procesos de SODIUM, cada una implementando una de los dispositivos de toma de decisión obtenidos a través de este trabajo: • Tabla de decisión convencional (cDT). • Tabla de decisión adaptativa (aDT). • Tabla de decisión adaptativa extendida (EADT) Para medir la eficiencia de un algoritmo de planificación respecto a un escenario de ejecución en particular, obtendremos un puntaje normalizado que permita comparar su desempeño respecto a otras combinaciones algoritmo/escenario. Para esto se midieron los siguientes elementos: • La cantidad de procesos de una categoría en particular para el escenario evaluado. • Relevancia de cada métrica según la categoría de aplicación según la Tabla II. Por ejemplo, para la categoría de procesamiento intensivo (P), sólo son relevantes las métricas Tiempo de Ciclo de Vida (tcv) y Tasa de Finalización (#f). Para las pruebas se establecieron seis recorridos (denominados 1, 2, 3, 4, 5, y 6). Cada recorrido pasa por un escenario de categoría única, y luego agrega procesos de otras categorías escalonadamente, hasta que llega al escenario donde procesos de todas las categorías se encuentran en x x x TABLA VI. RECORRIDOS DE LAS PRUEBAS REALIZADAS. Recorrido 1 2 3 4 5 6 # Procesos (II) (M) (ES) (WEB) (P) (S) 2 (S) (II) (M) (ES) (WEB) (P) 4 Categorías (P) WEB) (ES) (S) (P) (WEB) (II) (S) (P) (M) (II) (S) (ES) (M) (II) (WEB) (ES) (M) 6 8 10 (M) (ES) (WEB) (P) (S) (II) 12 En la Fig. 1 se muestra un gráfico de evolución para el promedio de eficiencia de los diferentes métodos de toma de decisión implementados respecto al caso ideal. La eficiencia ideal muestra el máximo hipotético que cada método podría obtener. Puede observarse que la EADT obtiene los mejores resultados para todos los casos debido a su capacidad de combinar el potencial ofrecido por la aDT para casos específicos, y el de la cDT para la generalización. Esto demuestra que la EADT implementada como mecanismo adaptativo para la selección de algoritmos puede obtener resultados cercanos a los ideales para todo tipo de escenarios. Los detalles de implementación y algoritmos de cálculo de eficiencia utilizados en las pruebas se encuentran detallados en [16]. MARTIN et al.: USE OF EXTENDED ADAPTIVE DECISION 1331 [2] [3] [4] [5] [6] Figura 1. Gráfico de la evolución de la eficiencia entre los diferentes métodos de toma de decisión y el caso ideal. VIII. CONCLUSIONES Y PERSPECTIVAS FUTURAS En el presente trabajo se ha logrado implementar con éxito un mecanismo para la toma de decisión sobre la configuración de un sistema operativo reconfigurable que no requiere la intervención directa del usuario, mediante la aplicación de tecnologías adaptativas. Las decisiones tomadas automáticamente por el kernel permitieron obtener una eficiencia cercana a la ideal para el aspecto de selección de planificadores de procesos. Con el uso de EADTs fuimos capaces de elaborar una alternativa para determinar la configuración de un aspecto de un sistema operativo que sería demasiado compleja o inaccesible de determinar a priori. También pudimos proveer al kernel de SODIUM con la capacidad de cambiar reglas existentes basándose en el comportamiento de aplicaciones y usuarios. Mientras que estas capacidades podrían ser obtenidas con otros dispositivos para la de toma de decisión, ésta alternativa se destaca en que provee un mecanismo intuitivo para determinar las reglas y funciones adaptativas. Respecto a SODIUM, existen muchos más aspectos de kernel que todavía no han sido analizados y convertidos a aspectos reconfigurables adaptativos. Este trabajo será realizado durante la siguiente etapa de investigación del equipo de desarrollo, en las cuales se harán nuevas mediciones para observar si los beneficios del uso de EADTs pueden ser obtenidos para cualquier aspecto. Las perspectivas del uso de mecanismos adaptativos para la reconfiguración automatizada (no interactiva) son prometedoras. Estas podrían ser aplicadas en cualquier sistema operativo hogareño o empresarial que exista en el mercado sin necesidad de hacer una reingeniería de sus aplicaciones. En este caso, un costo inicial será necesario para adaptar el kernel: se deben desarrollar las funciones y métricas a tener en cuenta como datos de ingreso para sus EADTs, se deben analizar los diferentes modos de implementación, y los eventos a definir. REFERENCIAS [1] S. MARTIN, N. CASAS, G. DE LUCA, “Diseño de un sistema operativo reconfigurable para fines didácticos y prácticos”. 6° Workshop de Tecnologia Adaptativa. San Pablo, Brasil, 2012. [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] A. C. VEITCH, N. C. HUTCHINSON, “Kea – a dynamically extensible and configurable operating system kernel”, 3rd International Conference on Configurable Distributed Systems. Vancouver, Canada, 1996. C. COWAN, T. C. AUTREY, C. KRASIC, C. PU, J. WALPOLE, “Fast concurrent dynamic linking for an adaptive operating system”. 3rd International Conference on Configurable Distributed Systems. Vancouver, Canada, 1996. B. N. BERSHAD, S. SAVAGE, P. PARDYAK, E. G. SIRER, M. E. FIUCZYNSKI, D. BECKER, C. CHAMBERS, S. EGGERS, “Extensibility: Safety and Performance in the SPIN Operating System”. 5th Symposium on Operating Systems Principles. ACM, New York, United States, 1995. R. LEA, Y. YOKOTE, J. ITOH. “Adaptive operating system design using reflection”. Object-Based Parallel and Distributed Computation. Volume 1107, Springer Berlin, 1996. N. CASAS, G. DE LUCA, M. CORTINA, G. PUYO, W. VALIENTE, “Implementación de distintos tipos de memoria en un sistema operativo didáctico”. XIV Congreso Argentino de Ciencia de la Computación. La Rioja, Argentina, 2008. H. RYCKEBOER, N. CASAS, G. DE LUCA, “Construcción de un Sistema Operativo Didáctico”. X Workshop de Investigadores en Ciencias de la Computación. La Pampa, Argentina, 2008. A. SILBERSCHATZ, P. B. GALVIN, G. GAGNE. “Operating System Concepts”. 8va Edición. John Wiley & Sons, New Jersey, United States, 2012. S. M. VARGHESE, K. P. JACOB, “Process Profiling Using Frequencies of System Calls”. The Second International Conference on Availability, Reliability and Security (ARES'07). Viena, Austria, 2007. R. MCDOUGALL, J. MAURO, “Solaris Internals”. Second Edition. Prentice-Hall. California, United States, 2007. J. J. NETO, “Adaptative rule-driven devices - general formulation and a case study”. Sixth International Conference on Implementation and Application of Automata. Pretoria, South Africa, 2001. T. PEDRAZZI, A. TCHEMRA, R. ROCHA, “Adaptive Decision Tables A Case Study of their Application to Decision-Taking Problems”. Adaptive and Natural Computing Algorithms, Springer. Vienna, Austria, 2005. A. H. TCHEMRA, “Tabela de decisão adaptativa na tomada de decisões multicritério”. Phd Thesis. Escola Politécnica, USP, San Pablo, Brasil, 2009 A. H. TCHEMRA, “Adaptatividade na Tomada de Decisão Multicritério”. 4° Workshop de Tecnologia Adaptativa. Escola Politécnica, USP, San Pablo, Brasil, 2010. T. L. SAATY, “Método de Análise Hierárquica”. McGraw-Hill. San Pablo, Brasil, 1991. S. MARTIN, “Aplicación de Tecnologías Adaptativas - Caso de Estudio: Sistemas Operativos Reconfigurables”. Tesis de Maestría. Universidad Nacional de La Matanza. Buenos Aires, Argentina, 2013. Sergio Miguel Martin se graduó en la carrera de Ingeniería en Informática en la Universidad Nacional de La Matanza (UNLaM). de Buenos Aires, Argentina el año 2010 donde también realizó su Maestría en el año 2013. Es docente ayudante de las materias de Sistemas Operativos desde el 2010; de Autómatas y Lenguajes Formales desde el 2011. Graciela Elisabeth De Luca es Analista Universitaria de Sistemas de La Universidad Tecnológica Nacional y Licenciada en Informática de la Universidad Católica de Salta. Desde el año 2005 pertenece al grupo de Investigación en Sistemas Operativos de la Universidad Nacional de la Matanza. Nicanor Blas Casas es Analista Universitario de Sistemas de la Universidad Tecnológica Nacional e Ingeniero en Informática de la universidad Católica de Salta. Desde el año 2005 pertenece al grupo de Investigación en Sistemas Operativos de la Universidad Nacional de la Matanza.