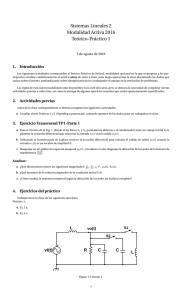
Diseo y construccin convertidor AC
Anuncio

Universidad de Costa Rica Facultad de Ingeniería Escuela de Ingeniería Eléctrica IE – 0502 Proyecto Eléctrico Diseño y construcción de un convertidor controlado CA-CD monofásico Por: Luis Carlos García Alfaro A01693 Ciudad Universitaria Rodrigo Facio Diciembre del 2005 Diseño y construcción de un convertidor controlado CA-CD monofásico Por: Luis Carlos García Alfaro Sometido a la Escuela de Ingeniería Eléctrica de la Facultad de Ingeniería de la Universidad de Costa Rica como requisito parcial para optar por el grado de: BACHILLER EN INGENIERÍA ELÉCTRICA Aprobado por el Tribunal: _________________________________ Ing. Luis Gólcher Barguil, M.Sc. Profesor Guía _________________________________ Ing. Max Ruiz Arrieta Profesor lector _________________________________ Ing. José Luis Castro Aguilar Profesor lector ii DEDICATORIA Primeramente a Dios, por haberme dado las fuerzas para siempre luchar hasta el final con éxito. A Mami y Papi por el apoyo, el esfuerzo, muchos sacrificios, consejos, paciencia y el cariño que me han brindado a lo largo de mi vida. Han sido y serán un gran ejemplo para mí. A Cristian G., Rolo y al Chino, por el esfuerzo y apoyo en el estudio. Finalmente al Ing. Luis Gólcher y al Ing. Jose Luis Castro por el apoyo y la gran ayuda brindada para la realización del presente proyecto. iii RECONOCIMIENTOS Al Ing. Jose Luis Castro, por su ayuda incondicional al proyecto y el gran aporte de conocimientos y mucha dedicación. MUCHISIMAS GRACIAS iv ÍNDICE GENERAL ÍNDICE DE FIGURAS..................................................................................vii RESUMEN.................................................................................................... viii CAPÍTULO 1: Introducción ...........................................................................1 1.1 Objetivos........................................................................................................................1 1.1.1 Objetivo general.................................................................................................1 1.1.2 Objetivos específicos .........................................................................................1 1.2 Metodología ...................................................................................................................1 CAPÍTULO 2: Tiristores SCR’s.....................................................................2 2.1 . Introducción ..............................................................................................................2 2.2. Características de los tiristores .....................................................................................2 2.3 Activación y apagado del tiristor ...................................................................................5 2.4 Aplicaciones de los tiristores SCR.................................................................................5 CAPÍTULO 3: Rectificadores Controlados...................................................7 3.1 3.2 Introducción ...................................................................................................................7 Principio de operación de un semi-convertidor monofásico .........................................7 CAPÍTULO 4: Diseño del circuito convertidor CA-CD monofásico. .......10 4.1. Circuito fuente de alimentación lineal. ........................................................................10 4.1.1. Transformador reductor ...................................................................................10 4.1.2. Rectificador......................................................................................................11 4.1.3. Filtrado.............................................................................................................11 4.1.4. Regulación .......................................................................................................11 4.2. Circuito semiconvertidor monofásico..........................................................................12 4.3. Circuito microcontrolador PIC16F648 ........................................................................14 4.4. Circuito lectura de voltaje DC .....................................................................................15 4.5. Circuito lectura de corriente DC..................................................................................17 CAPÍTULO 5: Programación del PIC16F648 ............................................18 5.1. Introducción .................................................................................................................18 5.2. Síntesis del programa...................................................................................................19 5.2.1. Interrupción por sincronía.....................................................................................20 5.2.2. Interrupción por TMR0.........................................................................................20 5.3. Tiempo de ocurrencia de interrupciones......................................................................24 5.4. Calculo k_TMR0 .........................................................................................................24 v CAPITULO 6: Dificultades técnicas y mejoras al proyecto. .....................26 CAPITULO 7: Conclusiones y Recomendaciones ......................................28 BIBLIOGRAFÍA............................................................................................30 APÉNDICES...................................................................................................31 Manual de diseño y construcción de un convertidor controlado AC-DC monofásico. ........31 Programa...............................................................................................................................39 Aplicación Comercial ...........................................................................................................42 ANEXOS: HOJAS DE FABRICANTE .......................................................43 vi ÍNDICE DE FIGURAS Figura 2.1 Símbolo del tiristor y tres uniones pn................................................................2 Figura 2.2 Curva característica v-i del tiristor. ...................................................................4 Figura 3.1 Circuito semiconvertidor monofásico ...............................................................8 Figura 3.2 Formas de onda. ................................................................................................9 Figura 4.1 Diagrama de bloques: Fuente de alimentación lineal......................................10 Figura 4.2 Circuito fuente de alimentación ......................................................................12 Figura 4.3 Circuito semiconvertidor monofásico .............................................................13 Figura 4.4 Circuito externo del PIC16F648......................................................................15 Figura 4.5 Red de resistencias ..........................................................................................16 Figura 4.6 Amplificador para lectura de voltaje DC ........................................................16 Figura 4.6 Circuito amplificador para lectura de corriente DC ........................................17 Figura 5.1 (a) pulso de conmutación del transistor T3 ......................................................18 (b) Onda voltaje rectificado ..............................................................................................18 Figura 5.2 PIC16F648.......................................................................................................20 Figura 5.3 Diagrama de flujo: Ciclo Principal..................................................................21 Figura 5.4 Diagrama de flujo: Ciclo de interrupciones ....................................................22 Figura 5.5 Diagrama de flujo: (a) interrupción por TMR0; (b) interrupción por sincronía ..........................................................................................................................................23 Figura 5.6 Onda voltaje rectificado ..................................................................................25 vii RESUMEN En el presente proyecto se hace una descripción de la teoría de los convertidores ACDC controlado monofásico explicando las características de operación, control de compuerta y aplicaciones de su elemento principal, los tiristores. Luego se estudia el principio de funcionamiento y las características de los rectificadores controlados, así como sus aplicaciones. Seguidamente se realiza la etapa de diseño aplicando toda la teoría y finalmente se implementa el convertidor donde se resalta las dificultades técnicas, así como las recomendaciones y mejoras al proyecto. Se realizó en el periodo de pruebas, un análisis de las ondas de salida para diferentes valores del ángulo de disparo y se comprobó el correcto funcionamiento del convertidor mediante una comparación con la teoría. La principal variable del proyecto fue el ángulo de disparo α, variable encarga de regular el voltaje de salida y por ende la potencia suministrada al motor de CD. Como anexo al proyecto, se suministra un manual de diseño y construcción de un convertidor AC-DC controlado monofásico, así como las hojas de fabricante de los componentes utilizados en su construcción. Como resultado de este proyecto se pudo comprobar que el diseño es algo muy simple a nivel teórico pero a la hora de implementarlo en la práctica es más complicado de lo que parece pero aun así el convertidor funcionó de la manera esperada manejando y controlando la velocidad de un motor de CD. viii CAPÍTULO 1: Introducción 1.1 Objetivos 1.1.1 Objetivo general Diseñar e implementar un rectificador controlado monofásico a partir de elementos disponibles en el mercado con el fin de realizar un control de fase en voltaje como base para la creación de un laboratorio para el curso de electrónica de potencia. 1.1.2 • Objetivos específicos Estudiar las características de operación y el control de compuerta de los tiristores controlados por fase (o SCR). • Comprender el principio de funcionamiento y las características de los rectificadores controlados. • Definir el tiempo que se debe dedicar a la implementación de un laboratorio de este tipo. • Definir la lista de materiales necesarios para la implementación del laboratorio. • Enumerar las posibles dificultades técnicas que se encuentran al implementar circuitos de convertidores AC-DC monofásicos. • Diseñar un circuito demo mediante un puente monofásico controlado con tiristores SCR. • Construcción de este circuito demo. 1.2 Metodología La metodología empleada para la realización del presente proyecto es experimental apoyada en bases teóricas. El objetivo principal es el diseño y construcción de un convertidor CA-CD monofásico para controlar un motor de CD y finalmente la elaboración de un manual para la realización de dicho experimento en un futuro laboratorio para el curso de electrónica de potencia. 1 CAPÍTULO 2: Tiristores SCR’s 2.1 . Introducción Un tiristor es un dispositivo semiconductor de potencia. Se usan mucho en circuitos electrónicos de potencia. Se manejan como conmutadores biestables, pasando de un estado no conductor a un estado conductor. Los tiristores son interruptores o conmutadores ideales en muchas aplicaciones. En comparación con los transistores, los tiristores tienen menores pérdidas por conducción en estado encendido y mayor manejo de potencia. Por otra parte, los transistores tienen en general mejor funcionamiento en conmutación, por su mayor velocidad y menores pérdidas de conmutación. Actualmente se hacen progresos continuos para obtener dispositivos con lo mejor de ambos, es decir, bajas pérdidas en estado de encendido y mejor funcionamiento en conmutación. 2.2. Características de los tiristores Un tiristor es un dispositivo semiconductor con cuatro capas de estructura pnpn con tres uniones pn. Al igual que los diodos, los tiristores tienen terminales ánodo y cátodo, sin embargo estos últimos integran una tercera terminal, denominada compuerta, la cual es utilizada para controlar la operación del dispositivo. La figura 2.1 muestra el símbolo del tiristor y una sección recta de tres uniones pn. Figura 2.1 Símbolo del tiristor y tres uniones pn. 2 3 Cuando el voltaje del ánodo se hace positivo con respecto al cátodo, las uniones J1 y J3 tienen polarización directa o positiva. La unión J2 tiene polarización inversa, y solo fluirá una pequeña corriente de fuga del ánodo al cátodo. Se dice entonces que el tiristor está en condición de bloqueo directo o en estado apagado y la corriente de fuga se llama corriente en estado apagado. La resistencia dinámica en estado de bloque es de 100kΩ o más. Si aumentamos el voltaje de polarización inversa VAK se incrementa a un valor lo suficientemente grande, la unión J2 polarizada inversamente entrará en ruptura. Esto se conoce como ruptura por avalancha y el voltaje correspondiente se llama voltaje de avalancha directa VBO. Dado que las uniones J1 y J3 están polarizadas directamente, hay un flujo libre de portadores a través de las tres uniones que provocará una gran corriente anódica directa. Se dice entonces que el dispositivo está en estado de conducción o estado encendido. En estado encendido, la resistencia dinámica del SCR es típicamente 0.01 a 0.1Ω y la caída de voltaje va a ser la caída óhmica de las cuatro capas y será pequeña, por lo común 1V. La corriente anódica debe ser mayor que un valor conocido como corriente de retención IL, a fin de mantener el flujo necesario de portadores a través de la unión; de lo contrario, al reducirse el voltaje del ánodo al cátodo, el dispositivo regresará a la condición de bloqueo. La corriente de retención IL, es la corriente anódica mínima requerida para mantener el tiristor en estado de conducción inmediatamente después de haberse activado y retirado la señal de la compuerta. En la figura 2.3 se muestra la curva característica v-i del tiristor. 4 Figura 2.2 Curva característica v-i del tiristor. Una vez que el tiristor es activado, se comporta como un diodo en conducción y no hay control sobre el dispositivo. El tiristor seguirá conduciendo, porque en la unión J2 no existe una capa que evite el movimiento libre de portadores. Sin embargo si se reduce la corriente en sentido directo del ánodo por debajo de un nivel conocido como corriente de mantenimiento IH , se genera una región de agotamiento alrededor de la unión J2 debida al número reducido de portadores; el tiristor estará entonces en estado de bloqueo. La corriente de mantenimiento es del orden de los miliamperios y es menor que la corriente de retención IL. La corriente de mantenimiento IH es la corriente anódica mínima para mantener el tiristor en estado de encendido. Cuando el voltaje del cátodo es positivo con respecto al del ánodo, la unión J2 tiene polarización directa, pero las uniones J1 y J3 tienen polarización inversa. Esto es similar a dos diodos conectados en serie con un voltaje inverso a través de ellos. El tiristor 5 estará en estado de bloqueo y pasará por él una corriente de fuga, conocida como corriente de fuga inversa IR. 2.3 Activación y apagado del tiristor Un tiristor se puede encender aumentando el voltaje VAK en sentido directo a más de VBO, pero esta forma de encendido podría ser destructiva. En la práctica, el método más común para disparar un tiristor es la aplicación de una corriente de compuerta aplicando un voltaje positivo entre las terminales de la compuerta y el cátodo. De esta forma el voltaje en sentido directo se mantiene menor que VBO dado que al aumentar la corriente de compuerta, disminuye el voltaje de bloqueo en sentido directo. Los niveles de voltaje y corriente de disparo en la compuerta deben tener un rango de valores comprendidos dentro de una zona de disparo de seguridad. Si se sobrepasa ese límite puede no activarse el tiristor o puede dañarse el dispositivo. El valor de la corriente de disparo es del orden de los miliamperios. Una vez encendido el tiristor, la señal de compuerta debe retirarse. La duración de esta señal varía entre 1 a 3μs para tiristores comerciales, aunque para aplicaciones especiales se fabrican tiristores con valores por debajo de los 100ns. Una señal de compuerta continua aumentaría la pérdida de potencia en la unión de la compuerta. Dado que la corriente anódica es mayor que la corriente de retención IL, el tiristor continuará conduciendo. Un tiristor en estado encendido, se comporta como un diodo conductor, y no hay control sobre el dispositivo. El dispositivo no se puede desactivar mediante otro pulso en la terminal de compuerta. Hay varias técnicas para apagar un tiristor. En todas las técnicas de conmutación la idea es reducir la corriente anódica en sentido directo hasta un valor inferior a la corriente de mantenimiento IH. 2.4 Aplicaciones de los tiristores SCR Esta clase de tiristores suele funcionar a frecuencia de línea (60Hz) y se apaga por conmutación natural cuando se trabaja en corriente alterna. El voltaje en estado de encendido varía normalmente desde unos 1.15V para aplicaciones a 600V hasta 2.5V para 6 dispositivos de 4000V. En años recientes han sido diseñados tiristores SCR para controlar potencias tan altas de hasta 10 MW y con valores individuales tan altos como de 5500 A a 1200 V. Debido a su bajo costo, alta eficiencia, robustez y especificación de alto voltaje y corriente, estos tiristores se usan mucho en los convertidores CA-CD. También se usan en casi todas las transmisiones de CD en alto voltaje y en muchas aplicaciones industriales tales como: • Control de relevadores. • Propulsores de velocidad variable. • Interruptores estáticos. • Control de motores. • Recortadores, Inversores y Cicloinversores. • Cargadores de baterías. • Circuitos de protección. • Control de potencia en calefactores eléctricos. En la mayoría de estas aplicaciones mencionadas con anterioridad la idea principal de la utilización de tiristores es para regulación de potencia y para esto se utilizan dos tiristores en antiparalelo para que cada uno conduzca en un ciclo de alternancia. Cuando el tiristor en disparado en el comienzo del ciclo (aproximadamente a 0º), los tiristores conducen aproximadamente 360º y esto ocasiona una transmisión de máxima potencia a la carga. En cambio, cuando uno de los tiristores es disparado cerca del pico positivo, los tiristores conducen 180º y esto produce una transmisión menor de potencia a la carga. A través de ajustes en el circuito de disparo, el accionamiento de los tiristores puede retrasarse y así obtener una transmisión variable de potencia monofásica. CAPÍTULO 3: Rectificadores Controlados 3.1 Introducción Como ya es sabido los diodos rectificadores proporcionan sólo un voltaje de salida fijo. Para obtener voltajes de salida controlados, se usan tiristores con control de fase en lugar de diodos. El voltaje de salida de los rectificadores de tiristor se varía controlando el ángulo de retardo α. Como ya se explico en el capítulo anterior el tiristor se activa aplicando un pulso corto a su compuerta y se desactiva por conmutación natural. Estos rectificadores controlados por fase son sencillos y menos costosos, y su eficiencia es, por lo general, superior al 95%. Como convierten de corriente alterna a corriente directa, a estos rectificadores controlados se le llama también convertidores CA-CD. El objetivo se este proyecto es diseñar y construir un convertidor controlado CA-CD monofásico para manejar un motor de corriente directa. Esta carga es considerada altamente inductiva por lo tanto la corriente que fluye a través de los tiristores es continua y tiene un rizado despreciable. 3.2 Principio de operación de un semi-convertidor monofásico El arreglo del circuito de un semi-convertidor monofásico se ve en la Figura 3.1, con una carga altamente inductiva. La corriente de carga es continua. Durante el semiciclo positivo, T1 está polarizado directamente. Cuando T1 se dispara en ωt=α, la carga se conecta a la alimentación de entrada a través de T1 y D2 durante el período α≤ ωt ≤ π. Durante el período π≤ t ≤ (π+α), el voltaje de entrada es negativa y el diodo de libre circulación Dm (freewheel diode) tiene polarización directa, por lo que conduce para proporcionar la continuidad de corriente de la carga inductiva. La corriente de carga se transfiere de T1 y D2 a Dm, y el tiristor T1 y el diodo D2 se desactivan. Durante el semiciclo negativo del voltaje de entrada, el tiristor T2 queda con polarización directa y el disparo del tiristor T2 en ωt=π+α invierte la polarización 7 8 de Dm. El diodo Dm se desactiva y la carga se conecta a la alimentación a través de T2 y D1. Durante los períodos 0≤ ωt ≤ α y π≤ t ≤ (π+α) no está encendido ninguno de los tiristores por lo tanto no hay alimentación de entrada. Lo que sucede es que debido a la carga altamente inductiva, en ella se almacena energía y mientras no haya alimentación esta energía es descargada por medio del Dm que presenta polarización directa durante estos períodos, esto proporciona continuidad de corriente en la carga. Figura 3.1 Circuito semiconvertidor monofásico La Figura 3.2 muestra las formas de onda del voltaje de entrada, voltaje de salida, las corrientes por T1, T2, D1, D2, corriente de entrada, corriente de salida y la corriente por Dm. El voltaje promedio de salida se puede calcular con: π 2 2 ω ω = Vcd = V sen t d( t ) [ - cos ωt ]απ m ∫ 2π α 2π = Vm (1 + cos α ) π y Vcd se puede variar desde 2Vm/π hasta 0, variando α de 0 a π. 9 Figura 3.2 Formas de onda. 10 CAPÍTULO 4: Diseño del circuito convertidor CA-CD monofásico. El siguiente capítulo pretende explicar cada circuito empleado en la etapa de diseño y construcción del convertidor CA-CD monofásico. Los circuitos implementados son los siguientes: a. Fuente de alimentación lineal b. Semi-convertidor monofásico c. Microcontrolador PIC16F648 d. Amplificador lectura de VDC e. Amplificador lectura de IDC 4.1. Circuito fuente de alimentación lineal. La fuente de alimentación lineal consta de elementos agrupados en 4 bloques funcionales, estos bloques se aprecian en la Figura 4.1: Figura 4.1 Diagrama de bloques: Fuente de alimentación lineal 4.1.1. Transformador reductor El primer bloque es un transformador- reductor de voltaje que, como su nombre lo indica, disminuye por inducción el voltaje. De los 120 Vca que hay en el primario, en el secundario puede tener 12, 18 ó 24Vp-p. La fuente de alimentación diseñada trabaja con 12Vp-p en el secundario. 11 4.1.2. Rectificador El siguiente bloque es un rectificador de onda completa construido con diodos, este ofrece mayor eficiencia porque aprovecha al máximo la señal del transformador, sin embargo, este sistema tiene grandes pérdidas de energía, puesto que sólo se aprovecha entre un 60 y 70% del voltaje; el resto se pierde en forma de calor, disipado principalmente por el transformador y los circuitos de regulación. 4.1.3. Filtrado El filtrado, que es la tercera etapa de la fuente alimentación lineal, este se realiza mediante un capacitor de 470μF. En esta etapa se presenta la primera aproximación hacia una señal de corriente directa, una señal de voltaje con un rizado de 1Vp-p. La señal queda prácticamente continua y lista para que mediante el regulador de voltaje se obtenga de ella la señal de corriente directa que se desee. 4.1.4. Regulación En el último bloque, el regulador de voltaje, se encarga de reducir el rizado y de proporcionar un voltaje de salida de la tensión exacta que se desea. El regulador es un encapsulado de tres terminales (de la familia 78XX). Su característica principal es que la tensión entre los terminales Vout y GND es de XX voltios y una corriente máxima de 1A. Las ideas básicas de funcionamiento de un regulador de este tipo son: 1. La tensión entre los terminales Vout y GND es de un valor fijo, no variable, que dependerá del modelo de regulador que se utilice. 2. La corriente que entra o sale por el terminal GND es prácticamente nula. Funciona simplemente como referencia para el regulador. 12 Para el presente proyecto el voltaje deseado es 5Vdc por lo tanto el regulador empleado es el 7805, estos 5V dan alimentación a los tiristores y demás circuitos incluido el microcontrolador. La Figura 4.2 muestra el circuito de la fuente de alimentación diseñado para el proyecto, en el se aprecia los diferentes bloques funcionales, incluido un diodo 1N4007 (D6) para separar la onda rectificada y la onda con poco rizado producida por el capacitor (C6), esto con la idea de detectar el cruce por cero; un capacitor (C11) de 0.1uF, que el fabricante de reguladores lo recomiendo ( ver Anexos hoja de fabricante del LM7805) porque agrega estabilidad al regulador, absorbiendo las variaciones de voltaje producido por conmutación de circuitos digitales y por último un pequeño circuito con un filtro RC, un divisor de tensión y un transistor 2N2222. Este circuito es el encargado de detectar el cruce por cero de la señal rectificada y por conmutación del transistor se envía un pequeño pulso al pin 6 del microcontrolador. La función de este pulso de expondrá más adelante en este capítulo. Figura 4.2 Circuito fuente de alimentación 4.2. Circuito semiconvertidor monofásico La Figura 4.3 muestra el circuito semiconvertidor monofásico. El principio de operación de dicho circuito se trata en el capítulo 3. 13 La activación de los tiristores T1 y T2 se da por medio de dos optotriacs conectados al pin10 del microcontrolador en alta impedancia y por medio de dos resistencias R1 y R2 limitadoras de corriente. Se utilizan optotriacs para aislar la parte electrónica de la parte de potencia. D3 es el diodo de libre circulación por donde se va a descargar la corriente del motor conectado en los terminales +DCSAL y – DCSAL cuando T1 y T2 se encuentren apagados. En los terminales +IDC y –IDC se conecta un amperímetro de corriente directa. Con respecto al puente de diodos presente en el circuito, dos diodos forman parte del semi-convertidor y los restantes dos son para fines didácticos, si se conecta un osciloscopio en las terminales OCOM y –DCSAL se puede apreciar una rectificación de onda completa. Los diodos D1 y D2 son diodos de protección para prevenir la circulación de la corriente en sentido inverso y por ultimo el diodo D4 también es para fines didácticos, si se conecta el osciloscopio en las terminales MEDO y -DCSAL se aprecia una rectificación de media onda. Figura 4.3 Circuito semiconvertidor monofásico 14 4.3. Circuito microcontrolador PIC16F648 La Figura 4.4 muestra el circuito externo para el correcto funcionamiento del microcontrolador. En dicha figura se indican los pines a utilizar, y el circuito para la comunicación con la computadora. La manera más sencilla para transferir datos entre el microcontrolador y la PC u otro dispositivo es por medio de la comunicación RS-232. RS-232 significa literalmente "Recommended Standard 232 ". Es un estándar publicado en 1969 por la EIA ("Electronic Standard Association") que define las características eléctricas que deben presentar los elementos de conexión para la comunicación serie entre computadoras y equipos periféricos. Es una conexión entre un Equipo Terminal de Datos DTE ("Data Terminal Equipment"), y un Equipo de Comunicación de Datos DCE ("Data Communication Equipment") empleando un intercambio de datos binario serie. Esta comunicación serie es asíncrona por eso se requieren dos líneas independientes, transmisión (TX) y recepción (RX); esta transferencia de datos se realiza por medio de un dispositivo interfaz el MAX 232 y luego con conectores DB9. La función del MAX232 es adjustar los niveles de señal del lado del microcontrolador (convierte niveles de voltaje RS232 +/- 10V a niveles TTL 0-5V y viceversa). En la figura 4.4 se muestra la configuración para el funcionamiento del MAX232. La resistencia R4 es una resistencia de pull-up. Esta resistencia se debe colocar en este pin (pin 4) debido a la función interna MCLR (Master Clear) que es un reset para el microcontrolador que se activa en bajo, por lo tanto, necesita estar en alto para el funcionamiento normal del micro. El pin 1 es una entrada analógica que lee el valor del potenciómetro 1, este define el tiempo para el disparo de los tiristores. El pin 6 recibe la señal del pulso del transistor detector del cruce por cero. En el pin 15 y 16 del microcontrolador se encuentra conectado un oscilador de cristal externo de 20MHz, que para efectos de esta aplicación no será utilizado. 15 También hay que recordar que VDD = +5V y VSS = GND. Figura 4.4 Circuito externo del PIC16F648 4.4. Circuito lectura de voltaje DC El circuito de lectura de voltaje DC es un amplificador seguidor de voltaje en conjunto con una red de resistencias que disminuyen un alto voltaje de 200Vcd a bajo voltaje 5Vcd como se aprecia en la Figura 4.5. En la Figura 4.6 se muestra el circuito completo que toma en cuenta un diodo zener D7 que limita el voltaje, por aquello que una de las resistencias de 20k se queme y un alto voltaje queme el amplificador operacional. El capacitor C5 es un filtro para obtener una mejor lectura, el potenciómetro POT2 es un potenciómetro de calibración y D5 es un diodo de protección. Finalmente a la salida del seguidor de voltaje se coloca un filtro RC para obtener precisión en la lectura. 16 A la salida del amplificador se obtiene un voltaje de 0Vcd a 5Vcd; o sea que si a la salida hay 5Vcd esto equivale a 200Vcd) por lo tanto por medio del convertidor analógico- digital se obtiene un rango de voltaje digital de 0 a 256 debido a la utilización de la conversión de 8 bits. Figura 4.5 Red de resistencias Figura 4.6 Amplificador para lectura de voltaje DC 17 4.5. Circuito lectura de corriente DC El circuito de lectura de corriente DC es un amplificador no inversor con ganancia 4. Av = 1+ R17 90k = 1+ = 10 R18 10k Debido a que los amplificadores operacionales no pueden amplificar corriente, se emplea una resistencia de 0.1Ω para obtener un voltaje de 0.5V en la patilla positiva del amplificador operacional y con una ganancia de 10 se obtiene un voltaje de 5V a la salida. De esta manera si se obtienen 5V a la salida del amplificador equivale a 5A (5V → 5A). De igual manera que el circuito de lectura de voltaje, por medio del convertidor analógico- digital se obtiene un rango de voltaje digital de 0 a 256 debido a la utilización de la conversión de 8 bits lo que equivale a una corriente de 0 a 5A. En el circuito también se aprecia un filtro RC (R16 y C10) a la salida para obtener una lectura precisa así como el capacitor C9 que también es un filtro. Figura 4.6 Circuito amplificador para lectura de corriente DC 18 CAPÍTULO 5: Programación del PIC16F648 5.1. Introducción El presente capítulo tiene como objetivo explicar el programa realizado para disparar los tiristores, así como una explicación del diagrama de flujo y pines del PIC habilitados. Como se trató en el capitulo 2 y 3, los tiristores poseen una tercera terminal, denominada compuerta, la cual es utilizada para controlar la operación del dispositivo. El control se realiza por medio de un pulso corto a la compuerta. Este pulso se puede activar en cualquier tiempo ωt = α. De esta manera variando el ángulo de retardo α se obtiene una regulación de potencia. Para activar los tiristores es necesario primeramente detectar el cruce por cero de la onda rectificada, para así poder disparar los tiristores en un tiempo ωt = α contado a partir del cruce por cero. La detección de cruce por cero se da por medio de un pulso debido a la conmutación del transistor T3. Este pulso de conmutación se aprecia en la Figura 5.1 (a) (a) (b) Figura 5.1 (a) pulso de conmutación del transistor T3 (b) Onda voltaje rectificado 19 La onda rectificada mostrada en Figura 5.1 (b) se divide en 256 intervalos o posiciones. Se define el angulo de disparo α = controlfase. Este angulo de disparo se varía con dos botones, el primero conectado en el pin AN2 aumenta α, el segundo botón conectado en el pin AN3 disminuye α. De esta forma se calcula un tiempo ωt = β (Βeta) definido como: Beta = 255 – controlfase Esto aun no es suficiente para activar los tiristores, por lo tanto se define una nueva variable COUNTDOWN, a esta variable se le carga el valor de α, COUNTDOWN = α. COUNTDOWN es un contador regresivo que avanza por las posiciones de la onda hasta el valor del angulo de disparo α. Cuando este contador regresivo llega a cero activa los tiristores. 5.2. Síntesis del programa El programa tiene como función activar los tiristores en un tiempo ωt = α después del cruce por cero de la onda rectificada por medio de dos interrupciones. En el modo normal el micro ejecuta el ciclo del programa principal siempre y cuando no ocurra un llamado de alguna interrupción. En el momento en que se da una interrupción el micro detiene la ejecución del programa principal y empieza la ejecución de la subrutina de interrupción. El programa principal calcula el ángulo de disparo definido por los botones de la siguiente manera: Beta = 255 – controlfase También mediante una subrutina cada 0.1seg el programa toma lectura del valor de voltaje VDC y la corriente directa IDC que circula por el motor DC y los transmite por puerto serie para desplegarlos en pantalla. El programa principal tambien presenta un rutina de aceleración del motor, esto porque el motor de CD cuando arranque tiene una corriente IA muy alta dado que solo es limitada por RA, esto podría dañar los tiristores. 20 5.2.1. Interrupción por sincronía La detección del cruce por cero es por medio de un pulso positivo debido a la conmutación del transistor T3. Esta señal de sincronía provoca una interrupción debido al cambio de estado en el pin RB0/INT. La subrutina de interrupción de sincronía carga el valor de la cuenta regresiva COUNTDOWN y activa el semáforo, que no es más que una bandera de aviso de que se dio una interrupción por sincronía y provoca un llamado a la subrutina de interrupción TMR0. 5.2.2. Interrupción por TMR0 Esta interrupción carga una constante k_TMR0 para el contador. Esta constante es la que produce el ciclo de esta interrupción por desborde. También verifica si countdown = 0 para activar los tiristores poniendo en bajo la salida del pin RB4 donde están conectados los tiristores. Figura 5.2 PIC16F648 21 Figura 5.3 Diagrama de flujo: Ciclo Principal 22 Interrupciones Interrupción por TIMER0 (TOIF?) Cada 32us 160 pulsos de 0.2us SI (5MHz) NO Interrupción por sincronía (INTF?) Interrupción por TIMER0 SI Cada 8.333ms (120Hz) NO Interrupción por sincronía RETL Interrupción Figura 5.4 Diagrama de flujo: Ciclo de interrupciones 23 Interrupción por TMR0 - Recargar TIMER0 con la constante (255-160) k_TMR0 ← 95 - Borrar la bandera de TIMER0 TOIF ← 0 NO COUNTDOWN == 0 Decrementar en 1 COUNTDOWN SI Disparar Tiristores RB4 ← 0 RETURN (a) (b) Figura 5.5 Diagrama de flujo: (a) interrupción por TMR0; (b) interrupción por sincronía 24 5.3. Tiempo de ocurrencia de interrupciones La onda rectificada de 120Hz se divide en 256 intervalos. El período de la onda es de: T= 1 = 8.333ms 120Hz Por lo tanto si se divide este período en 256 intervalos, cada intervalo sería de 32μs. 8.333ms = 32μs 256 Por lo tanto la subrutina de interrupción de TMR0 ocurre cada 32μs para ubicar el ángulo de disparo deseado. La subrutina de interrupción por sincronía ocurre cada 8.333ms, tiempo en el que ocurre cada cruce por cero de la onda rectificada. La figura 5.6 muestra la onda rectificada con f =120Hz. 5.4. Calculo k_TMR0 Se utiliza una frecuencia para el reloj interno del μc de 5MHz. T= 1 = 0.2μs 5MHz Por lo tanto el μc puede realizar 160 instrucciones en 32μs: 160*0.2μs=32μs. Para que se produzca una interrupción por desborde y se realize la subrutina cada 32μs la constante k_TMR0 se carga con un valor de 95. 95+160 = 255 De esta manera 160 instrucciones despues (32μs) se produce un desborde y por lo ende una interrupción por desborde del TIMER0. 25 Figura 5.6 Onda voltaje rectificado 26 CAPITULO 6: Dificultades técnicas y mejoras al proyecto. En el proceso de construcción del convertidor se presentaron varias dificultades, las cuales deben ser citadas: 1. Inicialmente el diseño del convertidor incluía sensorizar el circuito, la idea era utilizar dos circuitos amplificadores uno de corriente DC y otro de voltaje DC y a la salida de los amplificadores obtener una lectura para enviar al PIC16F648 y con el convertidor analógico-digital, traducir esta lectura a un valor de 0-256, para desplegar en la computadora dicho valor de corriente y voltaje. Pero el PIC16F648 no tiene convertidor analógicodigital, lo que posee son comparadores de 4bits, lo que conlleva a una gran imprecisión en las lecturas de voltaje y corriente. Por lo tanto no se implemento estos circuitos. Como mejora al proyecto se podría implementar los circuitos amplificadores ya explicados, emplear un convertidor ADC externo 0831CCN y utilizar la función I2CREAD del PIC16F648, y el bus I2C que es un estándar de comunicación bidireccional de 2 líneas: SDA (Serial Data) y SCL (Serial Clock), entre circuitos integrados (convertidores ADC, memorias EEPROM.) 2. Debido a la ausencia de un ADC interno en el PIC16F648 se tuvo que cambiar la idea inicial de utilizar un potenciómetro para controlar el ángulo de disparo de los tiristores, y por ende se utilizaron dos botones, uno para aumentar α y otro para disminuir α por medio de software cuando se presionaba los botones. 3. Una tercera dificultad se presento en software con el cálculo de la constante k_TMR0. Inicialmente se calculó k_TMR0= 95, pero el PICBASIC atrasa la ejecución de la interrupción por desborde, finalmente 27 se calculó en 130. Esto estaba generando problemas en el disparo de los tiristores porque la interrupción por desborde no estaban sucediendo en el momento preciso. Otras mejoras al proyecto que son interesantes de realizar son: • Sensor de velocidad ENCODER Utilizando sensores infrarrojos (receptor- emisor) y un disco con un 1mm de ancho con 60 agujeros colocado en el eje del rotor, se puede lograr medir la velocidad de giro del motor en revoluciones por minuto. • En software La aceleración del motor puede comportarse de otra manera, en este caso fue lineal pero puede ser exponencial o logarítmica. También se puede monitorear la corriente DC para que no sobrepase cierto límite o que se mantenga en un rango de valores. 28 CAPITULO 7: Conclusiones y Recomendaciones Hasta hace algunos años la circuitería de microprocesadores no trabajaba con circuitería de potencia, fue hasta la introducción de los variadores de frecuencia, que estas dos áreas trabajaron en conjunto. Hoy en día estas dos áreas van de la mano, tan es así que existen microprocesadores PIC exclusivos para el manejo y control de motores. Este proyecto comprobó que la electrónica de potencia ha ayudado a que estas dos áreas tan distintas se complementen. Al finalizar el presente proyecto existen varios aspectos que deben ser mencionados: • Es de suma importancia seguir los pasos del proceso de diseño y construcción del convertidor controlado CA-CD monofásico, se pudo comprobar que el diseño es algo muy simple a nivel teórico pero a la hora de implementarlo en la práctica es más complicado de lo que parece. • Debido a que existen redes de voltaje y corriente diferentes, es necesario aislar la tierra de potencia y la tierra de bajo voltaje. Se tuvo la experiencia a la hora de las pruebas, utilizando una misma tierra, que la parte de potencia afectaba el funcionamiento del microprocesador y no trabajaba como se deseaba. Este problema de solucionó utilizando tierras separadas. • Es necesario un aislamiento entre el circuito de potencia y el circuito electrónico. La utilización de optotriacs para este aislamiento es sencillo y muy efectivo. • En software se recomienda realizar una rutina de aceleración del motor. Esto porque el motor de CD cuando arranque tiene una corriente IA muy alta dado que solo es limitada por una resistencia de armadura RA, y esta corriente de arranque tan alta podría dañar los tiristores. 29 • El PIC16F648 tiene 8 configuraciones para el oscilador, utilizar un oscilador externo RC de 20MHz es una solución efectiva y de bajo costo. Se incluye en Apéndices una aplicación comercial de un convertidor controlado AC-DC monofásico: Payne Engineering MODEL36D/E DC OUTPUT POWER CONTROLS. Dicho convertidor se utiliza para manejar cargas DC resistivas e inductivas. Entre las características mas importantes asociadas al presente proyecto se pueden citar: • El circuito de potencia usa un puente de tiristores SCR’s y diodos con un diodo de libre circulación (“Free-wheeling diode”). • El circuito de control de compuerta se realiza mediante pulsos de disparo por medio de un aislamiento con transformadores de pulso para cada tiristor. • El control del ángulo de disparo es manual y utiliza un potenciómetro de 2 Watts y 75kΩ. 30 BIBLIOGRAFÍA Libros: 1. Matic, Nebojsa. “BASIC for PIC microcontrollers”, MikroElektronika Editorial, Yugoslavia, 2001. 2. Rashid, Muhammad. “Electrónica de Potencia”, 3era edición, Pearson Educación, México, 2004. Páginas web: 3. Díaz, Carlos. “Orientación para el diseño de fuentes de alimentación” http://perso.wanadoo.es/chyryes/tutoriales/archivos/fuentes.pdf 4. “I2C Function Background” http://www.totalphase.com/support/articles/article01/ 5. “Tecnologías del PC: El estándar RS-232” http://www.zator.com/Hardware/H2_5_1.htm 6. “Tema 5. Tiristores.” http://www.gte.us.es/~leopoldo/Store/tsp_5.pdf 7. “Tema 13. Rectificadores Controlados” http://www.gte.us.es/~leopoldo/Store/tsp_13.pdf APÉNDICES Manual de diseño y construcción de un convertidor controlado AC-DC monofásico. En este apartado se expone de manera detallada el proceso de diseño y construcción del convertidor CA-CD monofásico para manejar un motor de corriente directa. Toda la diagramación del circuito se hizo utilizando el programa EAGLE 4.15 que es de licencia gratuita para fines didácticos. Dicho programa puede ser bajado de la siguiente dirección www.cadsoft.de/freeware.htm. Con este programa se puede crear tanto el diagrama del circuito como el circuito impreso. El paso del diagrama al circuito impreso se realiza con un simple clic en el botón , el usuario ordena los componentes a su gusto y finalmente ejecuta el autoenrutado o sí prefiere puede realizar el enrutado manualmente. Otra de las características importantes de este programa es que permite hacer un listado de los componentes utilizados en la construcción del convertidor, exportándola a un documento que puede ser tanto de texto como de Excel. A continuación se muestra el circuito completo y la lista de componentes. 31 CIRCUITO TO COMPLETO RECTIFICADOR CONTROLADO MONOFÁSICO 32 Lista de componentes TRAFO B1 B2 C1 C2 C3 C4 C5 C6 C7 C8 C9 CONDB9 D1 D2 D3 D4 D5 IC1 IC2 IC3 8 PINHEAD 7 PINHEAD 120Vac-6Vac RECTIFIER-W06M RECTIFIER-KBPC2506 4.7u 4.7u 4.7u 4.7u 0.1u 470u 0.1u 25pF 25pF 1N4007 1N4007 1N5408 1N5408 1N4007 16F648A MAX232 7805T 1X2 1X1 LED1 LED2 LED3 OPTOTRIAC1 MOC3023 OPTOTRIAC2 MOC3023 Q1 CRYSTAL 20MHz R1 100 R2 100 R3 10k R4 10k R5 10k R6 4.7k R7 33k R8 10k R9 61k R10 10k R11 560 R12 100 R13 100 T1 2N6509 T2 2N6509 T3 2N2222 Todos los componentes anteriormente listados pueden conseguirse en cualquier electrónica, a un precio accesible. Una vez realizado la etapa de diseño del convertidor, se procede a realizar la etapa de programación del microcontrolador, este programa es el encargado de disparar los tiristores en un tiempo ωt=α y sensorizar el circuito. La programación completa del micro, incluido la compilación y el envío al microcontrolador vía puerto serie DB9, puede ser realizado en Code Designer – PICBasic PRO 2.45, dicho programa también es de licencia libre y puede ser bajado de la página www.rentron.com/mcstudio/mcstudio.exe. Todo el ensamblado del circuito puede ser montado en un placa perforada, también adquirible en las electrónicas, de esta manera en la parte inferior de la placa se puede realizar el proceso de soldado de los componentes y la unión de estos con cables. Es de 33 34 suma importancia realizar todas las conexiones siguiendo el siguiente diagrama para evitar complicaciones a la hora de la implementación. En una primera etapa del ensamblado se construye la fuente de alimentación lineal, y se verifica que a la salida del regulador 7805 tenga 5Vdc por medio de un multímetro digital. Estos 5Vdc serán la alimentación de toda la parte electrónica incluido el microcontrolador, por lo tanto es de suma importancia verificar ese valor de tensión. Seguidamente se construye el circuito detector de cruce por cero, y se verifica por medio del osciloscopio que el pulso requerido, sea lo más cercano a 5V y de 35 aproximadamente 0.4ms - 0.5ms. Recuérdese que este pulso es el responsable de provocar la interrupción por sincronía. En una segunda etapa de ensamblado se monta la circuitería externa del microcontrolador PIC16F648, incluido el circuito del MAX232 (la comunicación entre la PC y el microcontrolador). Los amplificadores de lectura de voltaje DC y corriente DC, se ensamblan y se prueban que estén funcionando correctamente, en el caso del amplificador de voltaje DC se calibra el POT2 para obtener una relación de 200Vdc a 5Vdc en la salida del amplificador. Para el amplificador de lectura de corriente DC, debido a que los amplificadores operacionales no pueden amplificar corriente, se emplea una resistencia de 0.1Ω para obtener un voltaje de 0.5V en la patilla positiva del amplificador operacional y con una ganancia de 10 se obtiene un voltaje de 5V a la salida. Por lo tanto en el proceso de ensamblado y de prueba se verifica que efectivamente exista una ganancia de 10. Finalmente se ensambla la parte de potencia donde el elemento principal son los tiristores. Una vez finalizado el montaje de todos los componentes en la tarjeta perforada, se programa el microcontrolador PIC16F648 por medio del cable DB9. A continuación se realizan las pruebas para comprobar el correcto funcionamiento del programa y de la circuiteria. Se recomienda realizar estas pruebas con una carga resistiva, por ejemplo, un bombillo incandescente. Utilizando los botones de control del ángulo de disparo se puede aumentar o disminuir α y de esta manera regular la potencia de salida y por ende la intensidad del bombillo. También con la ayuda de un osciloscopio conectado a los terminales +DCSAL y –DCSAL se puede observar y comparar la onda de voltaje de salida (Vo) de la Figura 3.2. para diferentes valores de α. 36 El paso final es poner en marcha el motor de corriente directa; se sustituye el bombillo por el motor. Se realizan las pruebas y la toma de datos de Vo, Io, Psal y α. 37 38 39 PROGRAMA '**************************************************************** '* Name : proyecto electrico.BAS * '* Author : Luis Carlos García Alfaro * '* Notice : Copyright (c) 2005 * '* Date : 03/11/2005 * '* Version : 1.0 * '**************************************************************** OPTION_REG = %01001111 'Se activan las opciones del PIC DEFINE OSC 20 TRISA = %10101111 'Se inicializan los puertos A TRISB = %00000011 'Se inicializan los puertos B '.. Se declaran las variables .. cont_lectura VAR BYTE semaforo VAR BYTE COUNTDOWN VAR BYTE Beta VAR BYTE M VAR BYTE K_TMR0 VAR BYTE controlfase VAR BYTE AnchoGate VAR BYTE SYMBOL tiristores = PORTB.4 '.. Valores iniciales .. cont_lectura = 0 controlfase = 5 semaforo = 0 COUNTDOWN = 250 AnchoGate = 0 Beta = 250 M = 250 k_TMR0 = 130 INTCON = %10010000 CMCON = 7 '..potencia minima '..constante de recarga de timer0, ciclo debe ser 32uS. 'Se habilitan las interrupciones externas GIE+INTE 'Pasa el puerto A al modo digital, ON INTERRUPT GoTo ISR Main: PORTB.5 = PORTB.0 'Copia señal de sincronia 120 Hz en RB5 IF semaforo = 1 Then 'sincronizado a 120Hz semaforo = 0 cont_lectura = cont_lectura - 1 'contador de lectura divide 120Hz/12 EndIF IF cont_lectura = 0 Then 'Este segmento va sincronizado a 10Hz cont_lectura = 12 'se recarga el contador de lectura Toggle PORTB.3 IF PORTA.2=0 Then '.. boton para aumentar potencia controlfase = (controlfase + 1) MIN 250 'el valor maximo de controlfase es 250 40 EndIF IF PORTA.3=0 Then '.. boton para disminuir potencia controlfase = (controlfase - 1) MAX 5 'el valor minimo de controlfase es 5 EndIF Beta = 255 - controlfase 'angulo beta tiene conteo para disparo '..M es la variable que lleva el angulo con la que se disparan ' los tiristores en cada ciclo. Normalmente M es igual al angulo Beta establecido ' con los botones. Pero cuando se mueve el potenciometro, Beta ' obtiene el nuevo valor de inmediato pero M busca igualar a Beta ' lentamente. M cambia de 1 en 1 cada 100ms. IF M>Beta Then M=M-1 Else IF M<Beta Then M=M+1 EndIF EndIF EndIF GoTo Main 'M se acerca a Beta que es menor 'M se acerca a Beta que es mayor 'Repita el ciclo principal. '..INTERRUPCIONES.. '..Atencion de las dos interrupciones del sistema. Disable ' para impedir interrupciones durante las interrupciones ISR: IF INTCON.1=1 Then GoSub INTSINCRO EndIF IF INTCON.2=1 Then GoSub INTTMR0 EndIF Resume 'cambio ocurrió en pin RB0/INT, 120 Hz 'desborde en TMR0, cada 32uS '..Interrupcion por sincronia ocurre cada 8.33mS cuando la onda de voltaje '..baja a 0. INTSINCRO: INTCON.1=0 'Borrar bandera de interrupción COUNTDOWN = M 'Se carga la constante M en COUNTDOWN AnchoGate = 3 ' tiempo del pulso de activación 3*32us = 96us High tiristores 'Se apagan los tiristores semaforo = 1 ' INTCON.2 = 1 'se provoca un llamado a INTTMR0 INTCON.5 = 1 'se habilitan las interrupciones en TMR0 Toggle PORTB.7 Return '..Temporizador TIMER0 sufre un OV y dispara una interrupcion cada 32us. '..El ciclo de 8333us(120Hz) se divide entre 256 partes de 32us. '..Timer0 se incrementa a 5MHz, o sea cada 0.2us. '..160 pulsos de 0.2us hacen 32us. '..Timer0 debe ser cargado con 255-160 = 95 en cada interrupcion. 41 INTTMR0: TMR0 = K_TMR0 'recargar TIMER0 con una constante INTCON.2 = 0 'Borrar bandera de interrupción por TMR0 IF COUNTDOWN = 0 Then IF AnchoGate >0 Then Low tiristores 'se disparan los tiristores AnchoGate = AnchoGate - 1 Else High tiristores 'se desactiva el pulso del gate de los tiristores EndIF Else COUNTDOWN = COUNTDOWN - 1 EndIF Toggle PORTB.6 Return End 42 Aplicación Comercial Payne Engineering MODEL36D/E DC OUTPUT POWER CONTROLS 43 ANEXOS: HOJAS DE FABRICANTE