Tema 5
Anuncio

EU
AT
Introducción. Sistemas de sólidos rı́gidos
AP
5.1.
LIC
AD
AI
Estática de los sistemas de
sólidos rı́gidos
I-
Capı́tulo 5
DP
TO
.F
ISI
CA
Un sistema de sólidos rı́gidos es un conjunto de sólidos rı́gidos que interaccionan entre sı́ y con el exterior.
Un sistema de sólidos rı́gidos es un modelo para describir un sistema mecánico, como lo son otros que hemos venido manejando en este texto (punto material, sistemas de puntos materiales, sólido rı́gido).
En este capı́tulo vamos a estudiar el equilibrio de sistemas mecánicos suponiendo que su comportamiento mecánico se explica satisfactoriamente considerando que son sistemas de sólidos rı́gidos.
En un sistema de sólidos rı́gidos llamamos ligadura o vı́nculo a una interacción que tiene el efecto de limitar las posiciones que puede ocupar uno o varios
de los sólidos rı́gidos.
Diremos que un sistema está ligado o vinculado si contiene ligaduras.
Si la ligadura se produce entre uno de los sólidos y el exterior diremos que
es una ligadura externa.
Si la ligadura se produce únicamente entre sólidos del sistema, diremos que
es una ligadura interna.
Llamaremos fuerzas de reacción vincular internas y momentos de reacción
vincular internos a las fuerzas y momentos que, según el principio de liberación,
sintetizan el efecto mecánico de ligaduras internas.
Llamaremos fuerzas de reacción vincular externas y momentos de reacción
vincular externos a las fuerzas y momentos que, según el principio de liberación,
sintetizan el efecto mecánico de ligaduras externas.
Las fuerzas activas (es decir, aquéllas capaces de provocar movimiento) que
actúan sobre un sistema de sólidos rı́gidos son de dos tipos:
Las fuerzas activas externas, que son aquellas debidas a la interacción del
sistema con agentes exteriores (el peso de los sólidos rı́gidos, por ejemplo).
133
sistema de sólidos rı́gidos
ligadura
ligadura externa
ligadura interna
fuerzas de reacción vincular internas
momentos de reacción vincular internos
fuerzas de reacción vincular externas
momentos de reacción vincular externos
fuerzas activas
Estática de los sistemas de sólidos rı́gidos
EU
AT
134
Las fuerzas activas internas, que son las debidas a interacciones entre
partes del sistema (por ejemplo, un muelle que una dos partes del sistema).
El estudio del equilibrio de sistemas de sólidos rı́gidos nos permitirá resolver
varios tipos de problemas. Por ejemplo:
I-
Averiguar qué fuerzas soportan las ligaduras que hay entre las vigas que
forman un cierta estructura cuando está soportando una cierta carga.
AD
AI
Averiguar qué fuerzas externas soporta el terreno en el que se sustenta
una estructura.
Averiguar cuándo se puede suprimir una ligadura sin por ello poner en
peligro la estabilidad de un sistema.
Averiguar qué fuerzas internas se producen en una viga cuando está soportando una cierta carga.
LIC
En estos problemas, en general, las fuerzas y momentos de reacción vincular
son incógnitas del problema.
Antes de comenzar con el estudio del equilibrio de un sistema de sólidos
rı́gidos procede hacer los siguientes comentarios sobre cómo se define un “sistema”. En los problemas que involucran varios sólidos rı́gidos suelen plantearse
dos dilemas previos:
AP
(A) ¿De cuántos sólidos rı́gidos está formado el sistema?
(B) ¿Qué cuerpos forman parte del sistema y cuáles no?
TO
.F
ISI
CA
La respuesta que se dé a (A) va a determinar el número de incógnitas asociadas
a vı́nculos y fuerzas interiores van a aparecer en el problema. La respuesta
que se dé a (B) va a determinar qué vı́nculos y fuerzas se van a considerar
como interiores y cuáles como exteriores. Para un sistema de cuerpos dado, en
principio hay varias elecciones posibles (compatibles con la suposición de que
el sistema es un conjunto de sólidos rı́gidos). En la práctica, las elecciones que
se hagan dependerán del problema concreto a estudiar.
DP
EJEMPLO: Dos vigas soldadas entre sı́ y unidas al exterior mediante una
articulación se podrán considerar como un único sólido rı́gido, si lo que nos
interesa es averiguar las fuerzas que ha de soportar la articulación; pero será más
conveniente suponer que se trata de dos sólidos rı́gidos si lo que nos interesa es
averiguar el momento que ha de soportar la soldadura. Esas dos vigas pueden
formar parte de una estructura más compleja (por ejemplo, un puente), pero
si lo que nos interesa es únicamente averiguar las fuerzas que ha de soportar la
articulación, lo más práctico será suponer que el resto del puente es el exterior.
5.2.
Condiciones necesarias y suficientes de equilibrio
Un sistema de N sólidos rı́gidos está en equilibrio si y sólo si:
El método de fragmentación
135
Los N sólidos están inicialmente en reposo respecto a un sistema de referencia inercial.
F~i +
i=1
mk
X
i=1
~ O (F~i ) +
M
k
nk
X
nk
X
f~j = ~0,
j=1
~ O (f~j ) = ~0.
M
k
j=1
(5.1)
AD
AI
mk
X
I-
Los sistemas de fuerzas (externas e internas) que actúan sobre cada uno
de los N sólidos son sistemas nulos. Es decir, para cada sólido k (con
k = 1, . . . , N ) sometido a mk fuerzas externas, F~i , y nk fuerzas internas,
f~i , se debe cumplir:
EU
AT
5.3
(5.2)
El método de fragmentación
TO
.F
ISI
5.3.
CA
AP
LIC
Para cada sólido rı́gido k, se puede usar un punto Ok distinto para el cálculo
de los momentos. Nótese que los sumatorios de las fuerzas y de los momentos
de las ecs. (5.1) y (5.2) se extienden hasta los mismos valores mk y nk . Esto es
ası́ porque estamos incluyendo los pares de fuerzas en la ec. (5.1), aún cuando
sabemos que sus resultantes son nulas.
Cada una de las N ecuaciones vectoriales del tipo (5.1) y (5.2) se puede
reescribir como 3 ecuaciones escalares.
En el caso plano, para cada sólido obtendremos 3 ecuaciones escalares (dos
de fuerzas y una de momentos), y por tanto en total tendremos 3N ecuaciones
escalares linealmente independientes. Estas ecuaciones permitirán resolver 3N
incógnitas, entre las que estarán incluidas incógnitas de configuración (que son
las coordenadas o ángulos de equilibrio de alguno de los sólidos) y las incógnitas
asociadas a fuerzas y momentos activas y de reacción vincular, tanto interiores
como exteriores.
DP
Cuando se estudia el equilibrio de un sistema de sólidos rı́gidos no siempre interesa determinar todas las fuerzas de reacción vincular, de manera que
puede ser innecesario resolver el sistema formado por todas las ecuaciones del
tipo (5.1) y (5.2). Esto nos lleva a adoptar una estrategia o método de generar
ecuaciones de equilibrio que se conoce como el método de fragmentación . Este
método se basa en la siguiente observación: Si fragmentamos mentalmente un
sistema de sólidos que está en equilibrio, cada uno de los fragmentos también
ha de estar en equilibrio.
El método de fragmentación consta de 4 pasos:
(I) Fragmentar el sistema en tantas partes como sea necesario para que en
las ecuaciones de equilibrio aparezcan explı́citamente las incógnitas (de reacción
vincular y de configuración) deseadas.
(II) Dibujar el diagrama de las fuerzas que actúan sobre cada uno de los
fragmentos, teniendo en cuenta que hay que aplicar:
(a) El principio de liberación, es decir, sustituir todos los vı́nculos (tanto
externos como internos) por las correspondientes fuerzas y momentos de
reacción vincular.
método de fragmentación
Estática de los sistemas de sólidos rı́gidos
EU
AT
136
(b) El principio de acción-reacción o tercera ley de Newton a las fuerzas y
momentos interiores.
I-
(III) Escribir las 3 ecuaciones de equilibrio (en el caso plano) correspondientes a cada uno de los N fragmentos.
(IV) Resolver el sistema formado por las 3N ecuaciones.
AD
AI
PROBLEMA RESUELTO 5.1:
LIC
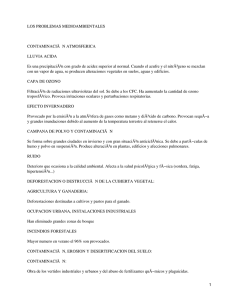
El sistema plano de la figura consta de 4 barras de pesos despreciables sometidas a
los siguientes vı́nculos: en A y E hay sendas articulaciones, en B un apoyo simple,
en C y D sendas soldaduras, entre F y G una biela que forma 53◦ con la horizontal.
Sabiendo que de H cuelga un peso de 100 N, determina las fuerzas de reacción
vincular en los puntos A, B, E y G. Datos adicionales: lAB = 1 m, lBE = 6 m,
lBG = 3 m, lEF = lEH /2.
Solución:
CA
A
H
F
D
G
B
TO
.F
ISI
PROBLEMA RESUELTO 5.1 Sistema de 4 sólidos rı́gidos. En A y E hay
sendas articulaciones, en B un apoyo
simple, en C y D sendas soldaduras,
entre F y G una biela que forma 53◦
con la horizontal, y de H cuelga un
~.
peso P
AP
C
E
(a) Para que en las ecuaciones de equilibrio aparezcan las incógnitas buscadas,
basta con considerar dos fragmentos: la barra EH y el resto del sistema.
DP
(b) Los diagramas de fuerzas de los dos fragmentos se ilustran en la fig. P1a.
~ Ex , φ
~ Ey y φ
~G
Nótese que en el diagrama de la izquierda los sentidos de φ
son los contrarios a los del diagrama de la derecha (y lo mismo ocurrirı́a con
los sentidos de los momentos, si apareciesen momentos de reacción vincular
asociados a ligaduras internas).
(c) Tomando cos 53◦ = 35 y sen 53◦ = 45 , las ecuaciones de equilibrio del fragmento de la izquierda son:
3
φAx − φG + φEx = 0,
5
4
φAy + φB − φG + φEy = 0,
5
(P1.1)
(P1.2)
El método de fragmentación
137
EU
AT
5.3
-fG
fEy
-fEy
P
fG
AD
AI
G
fB
fAy fAx
I-
F
D
A
H
FIGURA P1a: Diagramas de fuerzas
de los dos fragmentos.
B
LIC
C
-fEx E
fEx
E
3
6φAx − 1φAy − 3 φG = 0,
5
(P1.3)
donde la última ecuación se ha obtenido tomando momentos en E.
AP
Las ecuaciones de equilibrio de la barra EH son:
CA
3
−φEx + φG = 0,
5
4
−φEy + φG − 100 = 0,
5
lEH 4
φG − lEH 100 = 0,
2 5
(P1.4)
(P1.5)
(P1.6)
TO
.F
ISI
donde la última ecuación se ha obtenido tomando momentos en E. Nótese
que no hace falta calcular lEH puesto que puede sacarse como factor común
en la ec. (P1.6).
(d) Resolviendo el sistema formado por las ecs. (P1.4)–(P1.3) obtenemos φEx =
150 N, φEy = 100 N, φG = 250 N, φAx = 0 N, φAy = −450 N y φB = 550 N.
Si queremos expresar vectorialmente la solución diremos que sobre el frag~A =
mento de la izquierda actúan las siguientes fuerzas de reacción vincular: φ
~
~
~
(0, −450) N, φB = (0, 550) N, φG = (−150, −200) N, φE = (150, 100) N.
DP
PROBLEMA RESUELTO 5.2:
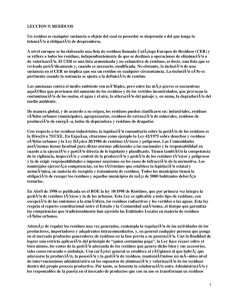
El sistema plano de la figura consta de las barras uniformes, AC y CE, ambas de
longitud l, que forman sendos ángulos de 53◦ con la horizontal. El módulo del peso
de la barra AC es P y el de la barra CE es 2P . Las barras están articuladas entre
sı́ en el punto C y unidas por sus puntos medios mediante una biela horizontal BD.
Además, la barra AC está articulada con el exterior en el punto A y la barra CE
Estática de los sistemas de sólidos rı́gidos
EU
AT
138
tiene un apoyo simple sobre una superficie horizontal en el punto E. Para el estado
de equilibrio, determina las fuerzas que sufren las barras en los puntos A, B, C,
D y E en función de P .
I-
C
A
53o
D
53o
E
LIC
PROBLEMA RESUELTO 5.2
AD
AI
B
Solución:
(a) Para que en las ecuaciones de equilibrio aparezcan las incógnitas buscadas,
basta con considerar dos fragmentos: la barra AC y la barra CE.
AP
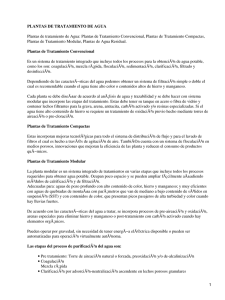
(b) El diagrama de fuerzas de la barra AC se ilustra en la fig. P2a izda. y el de
la barra CE en la fig. P2a dcha. Nótese que en el diagrama de la izquierda
~B , φ
~ Cx y φ
~ Cy son los contrarios a los del diagrama de la
los sentidos de φ
derecha.
TO
.F
ISI
CA
fCy
FIGURA P2a: Diagramas de fuerzas de las barras AC (izda.) y CD
(dcha.).
fCx
D
fAx
fE
-fB
fAy
P
A
2P
(c) Tomando cos 53◦ =
barra AC son:
DP
-fCy
fB
B
-fCx
C
C
3
5
y sen 53◦ =
4
5,
E
las ecuaciones de equilibrio de la
−φAx + φB − φCx = 0,
φAy − P + φCy = 0,
l3
4
3
l4
P + l φCx + l φCy = 0,
− φB −
25
25
5
5
(P2.1)
(P2.2)
(P2.3)
esta última ecuación se ha obtenido tomando momentos en el punto A. Las
El método de fragmentación
139
ecuaciones de equilibrio de la barra CE son:
−φB + φCx = 0,
−φCy − 2P + φE = 0,
l3
3
l4
2P + l φE = 0,
− φB −
25
25
5
(P2.4)
(P2.5)
(P2.6)
EU
AT
5.3
I-
esta última ecuación se ha obtenido tomando momentos en el punto C.
AD
AI
(d) Resolviendo el sistema formado por las ecs. (P2.1)–(P2.6) obtenemos: φAx =
9P
P
7P
0, φAy = 5P
4 , φB = φCx = 8 , φCy = − 4 , φE = 4 . La expresión
vectorial de las fuerzas de reacción
vincular que actúan
sobre la barra AC
~ C = − 9P , − P .
~ B = 9P , 0 , φ
~ A = 0, 5P , φ
es: φ
4
8
8
4
En el ejemplo anterior hemos llegado a la solución resolviendo el sistema
formado por las ecuaciones de los dos fragmentos. A veces, sin embargo,
puede resultar más sencillo resolver el sistema formado por las ecuaciones de
uno de los fragmentos y las del sistema considerado como un todo.
LIC
Nótese que las ecs. (P2.1)–(P2.3) correspondientes a la barra AC contienen
5 incógnitas de reacción vincular, y las ecs. (P2.4)–(P2.6) correspondientes
a la barra CE contienen 4 incógnitas de reacción vincular. Sin embargo, las
ecuaciones correspondientes al sistema como un todo (véase fig. P2b),
AP
−φAx = 0,
φAy − P − 2P + φE = 0,
4
3
l3
l3
3
−l φAx − l φAy +
P−
2P + l φE = 0,
5
5
25
25
5
(P2.7)
(P2.8)
(P2.9)
CA
contienen sólo 3 incógnitas de reacción vincular (la última ecuación se ha
obtenido tomando momentos en C). Por tanto, el sistema formado por las
ecs. (P2.4)–(P2.9) permite obtener las mismas soluciones y es más sencillo
de resolver que el formado por las ecs. (P2.1)–(P2.6).
TO
.F
ISI
C
D
B
fE
fAy
DP
fAx
P
A
2P
E
Existen otros métodos para la resolución de sistemas de sólidos rı́gidos como
el método de los nudos (que se basa en que si un sistema de sólidos está en
equilibrio, cada uno de los nudos, puntos, considerado en esa sistema ha de estar
en equilibrio) y el método de Ritter o método de las secciones que introduciremos
en la sección 5.5.
FIGURA P2b: Diagrama de fuerzas
del sistema formado por las barras
AC y CD considerado como un todo.
Estática de los sistemas de sólidos rı́gidos
EU
AT
140
5.4.
Grados de libertad y estabilidad de un sistema
de sólidos rı́gidos
5.4.1.
Grados de libertad externos e internos
AD
AI
I-
Conviene recordar que se denomina número de grados de libertad del sistema, o simplemente grados de libertad del sistema, al número de magnitudes
(en este texto, longitudes y ángulos) independientes que determinan de modo
inequı́voco la configuración de un sistema de puntos materiales.
LIC
EJEMPLO: El número de grados de libertad de un sistema plano formado
por N sólidos rı́gidos, supuestos libres (es decir, no sometidos a vı́nculos de
ningún tipo, ni externos ni internos), es 3N , y representa los movimientos
independientes en que se pueden descomponer todos los posibles movimientos
de los N sólidos libres en el plano.
CA
AP
Cuando se analiza un sistema de sólidos rı́gidos puede considerarse, por
una parte, los movimientos que dicho sistema puede realizar como conjunto,
es decir, como si se tratase de un único sólido rı́gido (con todos los vı́nculos
“congelados”). Por otra parte, podemos considerar los movimientos relativos
entre los cuerpos que forman el sistema de sólidos. Adoptando este punto de
vista, podemos decir que un sistema de sólidos rı́gidos posee grados de libertad
externa (o grados de libertad externos) GE , asociados a los movimientos de
conjunto respecto al exterior, y grados de libertad interna (o grados de libertad
internos) GI , asociados a los movimientos independientes de los sólidos rı́gidos
entre sı́.
Para el caso de un sistema plano de sólidos libres, el número de grados de
libertad externos vale
GE (l) = 3,
(5.3)
TO
.F
ISI
ya que son 3 los movimientos independientes que como conjunto (como si fuera
un único sólido) pueden realizar en el plano: dos traslaciones y un giro (por
ejemplo). Por otro lado, dado que el número de grados de libertad de cada sólido
rı́gido libre es también 3, el número total de grados de libertad del sistema de N
sólidos rı́gidos será
G = 3N,
(5.4)
DP
de donde resulta que el número de grados de libertad internos del sistema debe
ser
GI = 3N − 3.
(5.5)
Si el sistema plano de sólidos está ligado, los movimientos relativos y de
conjunto quedan total o parcialmente impedidos o restringidos a causa de los
vı́nculos o ligaduras. Conviene recordar que llamamos coacciones a las limitaciones elementales de movimiento originadas por cada ligadura. Las coacciones
son tı́picamente impedimentos de traslaciones y/o giros (por ejemplo, las coacciones realizadas por una articulación sobre un sólido consisten en impedir dos
traslaciones). Una coacción, por consiguiente, equivale a la supresión de un
grado de libertad. Las coacciones se modelan mediante fuerzas y/o momentos
Grados de libertad y estabilidad de un sistema de sólidos rı́gidos
141
Estabilidad externa o estabilidad de sustentación
AD
AI
5.4.2.
I-
de reacción vincular, de acuerdo con el principio de liberación. Estas fuerzas
y momentos de reacción vincular introducen incógnitas de reacción vincular
en el problema, en número equivalente al de coacciones (por ejemplo, una articulación introduce una fuerza de reacción vincular con dos incógnitas, que
corresponden a las dos coacciones realizadas por el vı́nculo).
De lo anterior se deduce que a causa de los vı́nculos externos e internos
presentes deberá disminuir el número de grados de libertad global del sistema
G respecto al caso libre, y con él GE , GI , o ambos.
EU
AT
5.4
GE = 3 − CE .
LIC
El número de grados de libertad externa, GE , está exclusivamente condicionado por las ligaduras externas, puesto que éstas son las únicas que pueden impedir los movimientos de conjunto. Dado que para un sistema plano
GE (l) = 3, las ligaduras externas deben ejercer un mı́nimo de 3 coacciones (el
impedimento de dos traslaciones y un giro, por ejemplo) para impedir todos
los movimientos del sistema de sólidos como un todo.
En el caso plano, si el número de coacciones externas es CE ≤ 3, el número
de grados de libertad externos del sistema de sólidos se obtiene como
(5.6)
AP
Si, por el contrario, CE > 3, el número de grados de libertad externos es,
por definición, GE = 0. Alternativamente, GE recibe el nombre de grado de
inestabilidad externa del sistema.
Según el valor de CE pueden plantearse 3 situaciones:
CA
CE = 3. En este caso las ligaduras externas son las estrictamente necesarias en número, y adecuadas en tipo y localización, para impedir
los movimientos del sistema de sólidos como un todo: ello implica que
aparecen 3 incógnitas de reacción vincular externas en las ecuaciones de
equilibrio del sistema completo (que también son 3), y dichas incógnitas
se podrán determinar a partir de tales ecuaciones. Por tanto,
TO
.F
ISI
GE = 0.
(5.7)
Un sistema de este tipo se dice que es externamente isostático o isostático
de sustentación.
DP
CE > 3. En este caso las ligaduras externas son superabundantes en
número, y eficaces por su tipo y localización, lo que significa que el número
de coacciones ejercidas por ellas es mayor que 3, y que los movimientos
del sistema como un todo quedan suprimidos. Entonces, el número de
incógnitas de reacción vincular externas supera al número de ecuaciones
de equilibrio del sistema completo. Por tanto, no pueden calcularse todas
las incógnitas sólo con las ecuaciones de la Estática del sistema completo1 . Su determinación require: (a) si el sistema es inestable de constitución (véase más adelante), usar las ecuaciones independientes “sobrantes”
(véase más adelante) para calcular alguna de las incógnitas de reacción
vincular externas; (b) si el sistema es inestable de constitución y las ecuaciones generadas por el método (a) no son suficientes, o si el sistema es
1 A veces, sin embargo, la simetrı́a del problema reduce el número de incógnitas externas
de reacción vincular efectivas, con lo cual ese cálculo sı́ serı́a posible.
número de coacciones externas
Estática de los sistemas de sólidos rı́gidos
EU
AT
142
I-
grado de hiperestaticidad externa
estable internamente (véase más adelante), admitir que los sólidos del sistema experimentan pequeñas deformaciones, y recurrir a ecuaciones adicionales propias de la Elasticidad y Resistencia de Materiales. En estos
sistemas cabe la posibilidad de suprimir o modificar algunas ligaduras externas (no cualesquiera) sin que por ello puedan producirse movimientos
de conjunto al aplicar fuerzas arbitrarias sobre el sistema. Para caracterizar la estabilidad externa del sistema de sólidos cuando CE > 3 se define
el grado de hiperestaticidad externa del sistema,
externamente hiperestático
(5.8)
AD
AI
HE = |3 − CE | > 0,
aunque no debe olvidarse que en estos sistemas GE = 0, de acuerdo con
la definición de grados de libertad. Un sistema de este tipo se dice que es
externamente hiperestático, o hiperestático de sustentación, con grado de
hiperestaticidad externa HE .
externamente inestable
CA
AP
LIC
CE < 3. En este caso las ligaduras externas ejercen un número de coacciones menor que 3, insuficiente para cancelar todos los movimientos del
sistema como un todo. Si las fuerzas se eligen convenientemente, el sistema puede estar en equilibrio como un todo respecto a un sistema de
referencia exterior pero, en general, el sistema se moverá bajo la acción de
fuerzas cualesquiera. En el primer caso, serán aplicables las ecuaciones de
equilibrio del sistema como un todo. A partir de ellas podrán despejarse
todas las incógnitas de reacción vincular externas y, además, se obtendrán
condiciones que deben ser satisfechas bien por las fuerzas activas externas
o bien por la disposición geométrica del sistema de sólidos (parámetros de
configuración), a fin de que el sistema esté en equilibrio como conjunto.
En estos sistemas,
GE > 0.
(5.9)
Un sistema de este tipo se dice que es externamente inestable, o un mecanismo de sustentación, con grado de libertad externo GE .
TO
.F
ISI
Los sistemas externamente estables son tanto los externamente isostáticos
como los externamente hiperestáticos.
Para terminar, una importante consideración de ı́ndole práctica acerca del
tipo y localización de las ligaduras: antes de determinar GE (ó HE ) hay que
comprobar si las ligaduras o vı́nculos externos son realmente eficaces a la hora
de ligar al sistema. Un análisis similar al que hicimos en el capı́tulo 4 para el caso
de un único sólido rı́gido demuestra que aquellos sistemas planos cuyas fuerzas
de reacción vincular externas sean todas paralelas o todas concurrentes en un
punto son externamente inestables, aunque sea CE > 3. En el apartado 5.4.5
se discutirá esto con más detalle.
DP
5.4.3.
Estabilidad interna o estabilidad de constitución
El número de grados de libertad interna, GI , está exclusivamente condicionado por las ligaduras internas, puesto que éstas son las que pueden impedir
los movimientos relativos entre los sólidos del sistema. Dado que para un sistema plano GI (l) = 3N − 3, las ligaduras internas estrictamente necesarias para
impedir todos los movimientos relativos entre sólidos deben ejercer 3N − 3
coacciones (impedir 3N − 3 movimientos independientes).
Grados de libertad y estabilidad de un sistema de sólidos rı́gidos
143
número de coacciones internas
I-
Si fragmentamos el sistema y consideramos los N sólidos por separado se
generan 3N ecuaciones linealmente independientes que permiten despejar 3N
incógnitas (entre externas e internas). Por otro lado, al estudiar el equilibrio
del sistema considerándolo como un todo, se obtienen 3 ecuaciones de equilibrio. Estas 3 ecuaciones de equilibrio global son combinaciones lineales de las
3N ecuaciones obtenidas al considerar los N sólidos por separado.
En el caso plano, si el número de coacciones internas es CI ≤ 3N − 3, el
número de grados de libertad internos del sistema de sólidos se obtiene como
EU
AT
5.4
(5.10)
AD
AI
GI = 3N − 3 − CI .
Si, por el contrario, CI > 3N − 3, el número de grados de libertad internos
es, por definición, GI = 0. Alternativamente, GI recibe el nombre de grado de
inestabilidad interna del sistema o grado de deformabilidad interna del sistema.
Según el valor de CI pueden plantearse 3 situaciones:
internamente isostático
AP
LIC
CI = 3N − 3. En este caso las ligaduras internas son las estrictamente
necesarias en número, y adecuadas en tipo y localización, para impedir
eficazmente los movimientos relativos de los sólidos del sistema plano:
ello implica que aparecen 3N − 3 incógnitas de reacción vincular internas
en las ecuaciones de equilibrio internas e independientes del sistema (que
también son 3N − 3), y dichas incógnitas se podrán determinar a partir
de tales ecuaciones. Un sistema de este tipo se dice que es internamente
isostático o isostático de constitución.
grado de inestabilidad interna
TO
.F
ISI
CA
CI > 3N − 3. En este caso las ligaduras internas son superabundantes en
número, y eficaces por su tipo y localización, lo que significa que el número
de coacciones ejercidas por ellas es mayor que 3N − 3, y que los movimientos relativos quedan suprimidos. Entonces el número de incógnitas
de reacción vincular internas supera al número de ecuaciones de equilibrio internas independientes del sistema. Su determinación admitir que
los sólidos del sistema experimentan pequeñas deformaciones, y recurrir a
ecuaciones adicionales propias de la Elasticidad y Resistencia de Materiales. En estos sistemas cabe la posibilidad de suprimir o modificar algunas
ligaduras internas (no cualesquiera) sin que por ello puedan producirse
movimientos relativos entre sólidos al aplicar fuerzas arbitrarias sobre el
sistema. Para caracterizar la estabilidad externa del sistema de sólidos
cuando CI > 3N − 3 se define el grado de hiperestaticidad interna del
sistema,
HI = |3N − 3 − CI | > 0,
(5.11)
aunque no debe olvidarse que en estos sistemas GI = 0, de acuerdo con
la definición de grados de libertad. Un sistema de este tipo se dice que es
internamente hiperestático, o hiperestático de constitución, con grado de
hiperestaticidad interna HI .
DP
CI < 3N − 3. En este caso las ligaduras internas ejercen un número de
coacciones insuficiente para cancelar todos los movimientos relativos posibles entre los sólidos. Si las fuerzas se eligen convenientemente, el sistema
puede estar en equilibrio relativo interno pero, en general, las distintas
partes del sistema se podrán mover unas respecto a otras internamente
bajo la acción de fuerzas cualesquiera. En el primer caso, serán aplicables las ecuaciones de equilibrio internas independientes. A partir de
internamente hiperestático
Estática de los sistemas de sólidos rı́gidos
EU
AT
144
ellas podrán despejarse todas las incógnitas de reacción vincular internas
(aunque en función de las externas, si las hubiera). En este caso,
GI > 0.
Un sistema de este tipo se dice que es internamente inestable, internamente deformable, inestable de constitución, o deformable de constitución,
con grado de libertad interna GI .
I-
internamente inestable
(5.12)
AD
AI
En el caso plano, si el número de coacciones ejercidas por los vı́nculos (tanto
internos como externos) es C = CE +CI ≤ 3N , el número de grados de libertad
global del sistema, al que denominaremos simplemente número de grados de
libertad, se obtiene como
G = 3N − C.
(5.13)
CA
FIGURA 5.2: Sistema de tipo (ii) con
HE = 1, HI = 1 y H = 2.
Estabilidad global de un sistema: sistemas inestables,
isostáticos e hiperestáticos
AP
5.4.4.
LIC
FIGURA 5.1: Sistema de tipo (i):
GE = 0, GI = 0 y G = 0.
Los sistemas internamente estables son tanto los sistemas internamente
isostáticos como los internamente hiperestáticos.
Al igual que en el caso de los grados de libertad externos, antes de determinar el número de grados de libertad interna GI del sistema hay que comprobar
si las ligaduras o vı́nculos internas son realmente eficaces a la hora de ligar al
sistema, y prestar atención a la disposición de tales ligaduras y de los propios
sólidos. Por ejemplo, puede ocurrir que un sistema en el que GI = 0 conste de
dos partes: una de ellas excesivamente ligada, y la otra deficientemente ligada,
de modo que el exceso de ligaduras de una se compense con el defecto de la
otra. Sin embargo, la parte deficientemente ligada podrá deformarse si las fuerzas son las apropiadas, con lo que subsisten aún movimientos relativos internos
en el sistema. Esto se discutirá con más detalle en el apartado 5.4.5.
TO
.F
ISI
Si, por el contrario, C > 3N , el número de grados de libertad es, por definición,
G = 0. Para caracterizar la estabilidad global del sistema de sólidos cuando
C > 3N , se define el grado de hiperestaticidad global del sistema,
DP
FIGURA 5.3: Sistema de tipo (iii) con
GE = 1, GI = 1 y G = 2.
FIGURA 5.4: Sistema de tipo (iii) con
GE = 1, GI = 1 y G = 2.
H = |3N − C| > 0.
(5.14)
No obstante, debemos advertir que en los casos HE > 0, GI > 0, y GE >
0, HI > 0, las ecs. (5.13) y (5.14) pueden dar resultados incorrectos para
determinadas disposiciones de las ligaduras. Esta circunstancia se discutirá en
detalle más adelante.
Si no quisiéramos más información que la estabilidad global de un sistema,
bastarı́a con dar G (ó H). Sin embargo, este número no siempre es lo suficientemente informativo sobre el comportamiento que cabe esperar en el sistema. En
cambio, la combinación de GE (ó HE , en sistemas externamente hiperestáticos) y GI (ó HI , en sistemas internamente hiperestáticos), proporciona una
idea más clara de lo que ocurre.
La tabla 5.1 resume las 9 posibles formas de clasificar un sistema de sólidos
rı́gidos atendiendo a su estabilidad externa e interna. Dichos casos son los
siguientes:
(i) GE = 0, GI = 0 y G = 0 (véase la fig. 5.1). En este caso el sistema
es al mismo tiempo isostático externa e internamente (de sustentación y
145
EU
AT
Grados de libertad y estabilidad de un sistema de sólidos rı́gidos
GE = 0
GE > 0
HI > 0 (y GI = 0)
H > 0 (y G = 0),
véase (ii)
H > 0 (y G = 0),
véase (vi)
G > 0 (por inspección),
véase (v)
GI = 0
H > 0 (y G = 0),
véase (vii)
G = 0,
véase (i)
G > 0,
véase (ix)
GI > 0
hiperestático, isostático o mecanismo,
H ó G por inspección, véase (iv)
G > 0,
véase (viii)
I-
HE > 0 (y GE = 0)
AD
AI
5.4
G > 0,
véase (iii)
TABLA 5.1: Las 9 clases de sistemas de sólidos rı́gidos según su estabilidad externa e interna.
LIC
de constitución). Los vı́nculos externos e internos son los estrictamente
necesarios en número, y del tipo y localización adecuados, para impedir de modo eficaz los movimientos relativos y de conjunto del sistema
de sólidos, sean cuales fueren las fuerzas que se apliquen. Será posible
determinar a partir de las ecuaciones de equilibrio todas las incógnitas
de reacción vincular. El sistema es globalmente isostático o estáticamente
determinado.
FIGURA 5.5: Sistema globalmente hiperestático de tipo (iv) con HE = 2,
GI = 1 y, por inspección, H = 1.
CA
AP
(ii) HE > 0, HI > 0 y H > 0 (véase la fig. 5.2). En este caso el sistema
es a la vez hiperestático externa e internamente. Los vı́nculos externos
e internos son en ambos casos superabundantes, el tipo y distribución
de unos y otros es el adecuado, y los posibles movimientos relativos y
de conjunto están impedidos (además, lo están con suficiencia). No es
posible determinar los valores de todas las incógnitas de reacción vincular
mediante el exclusivo recurso a las ecuaciones de equilibrio de la Estática.
El sistema es globalmente hiperestático, ó estáticamente indeterminado, de
grado H.
FIGURA 5.6: Sistema globalmente hiperestático de tipo (iv) con HE = 2,
GI = 1 y, por inspección, H = 1.
(iv) HE > 0 y GI > 0 (véase las figs. 5.5, 5.6, 5.7, 5.8, 5.9 y 5.10). En
este caso es necesario estudiar la mutua influencia entre las ligaduras
externas y las internas en relación con los posibles movimientos relativos interiores. Los movimientos de conjunto están neutralizados debido
a la hiperestaticidad externa del sistema. Aparentemente, dado que el
sistema es deformable internamente, subsistirı́an movimientos relativos
no cancelados entre sólidos. Sin embargo, debemos tener en cuenta que
si las superabundantes ligaduras externas son suficientes en número, son
del tipo adecuado y están convenientemente situadas, pueden contribuir
a impedir los movimientos relativos entre los sólidos del sistema, “colaborando” con las ligaduras internas. Si éste fuera el caso, el sistema de
FIGURA 5.7: Sistema globalmente
isostático de tipo (iv) con HE = 1,
GI = 1 y, por inspección, G = 0.
DP
TO
.F
ISI
(iii) GE > 0, GI > 0 y G > 0 (véase las figs. 5.3 y 5.4). En este caso el sistema
es externa e internamente inestable. Los vı́nculos externos e internos son
insuficientes para impedir todo movimiento relativo y de conjunto. Si se
aplican fuerzas al sistema, en general se moverá y deformará. Aún ası́,
elegidas convenientemente las fuerzas, el sistema puede permanecer en
equilibrio, y en ese caso podrı́amos escribir las oportunas ecuaciones de
equilibrio y a partir de ellas determinar los valores de todas las incógnitas
de reacción vincular. El sistema es globalmente mecanismo de grado G, o
lo que es lo mismo, es inestable de grado G.
Estática de los sistemas de sólidos rı́gidos
EU
AT
146
sólidos tendrı́a G = 0 y, si además HE > GI , tendrı́a un grado de hiperestaticidad global dado por la ec. (5.14). El sistema quedarı́a clasificado
como globalmente hiperestático (si HE > GI , véase las figs. 5.5 y 5.6) o
globalmente isostático (si HE = GI , véase la fig. 5.7).
I-
AD
AI
LIC
(vi) GE = 0, HI > 0 y H > 0 (véase la fig. 5.12). En este caso todos los
movimientos relativos y de conjunto están neutralizados. No se podrán
calcular todas las incógnitas de reacción vincular a partir de las ecuaciones
de equilibrio, exclusivamente. El sistema es globalmente hiperestático.
TO
.F
ISI
FIGURA 5.10: Sistema globalmente
inestable de tipo (iv) con HE = 1,
GI = 2 y, por inspección, G = 1.
(v) GE > 0, HI > 0 y G > 0 (véase la fig. 5.11). En este caso la superabundancia de ligaduras internas cancela los movimientos relativos entre los
sólidos, pero no puede impedir los movimientos de conjunto del sistema,
que es inestable externamente. Ası́ pues, serı́a erróneo calcular G mediante
la ec. (5.13) ó H mediante la ec. (5.14), pues si HI > GE resultarı́a
H > 0, siendo este resultado a todas luces carente de sentido cuando el
sistema globalmente considerado se puede mover. Deberemos, por tanto,
caracterizar la estabilidad del sistema dando por separado GE y HI . El
sistema deberá clasificarse como globalmente inestable. El valor real de G
se determinará mediante el análisis de los movimientos no cancelados en
el sistema.
AP
FIGURA 5.9: Sistema globalmente
pseudohiperestático, inestable de tipo (iv) con HE = 3, GI = 1 y, por
inspección, G = 1. El cálculo de H
usando la ec. (5.14) da H = 2, lo
cual es incorrecto.
Queda la posibilidad de que C < 3N . En este caso el sistema quedarı́a
clasificado como globalmente inestable , y calcular G con la ec. (5.13)
plantea menos objeciones conceptuales, porque es verdad que subsisten
movimientos no cancelados en el sistema (véase la fig. 5.10).
CA
FIGURA 5.8: Sistema globalmente
pseudoisostático, inestable de tipo
(iv) con HE = 1, GI = 1 y, por
inspección, G = 1. El cálculo de G
usando la ec. (5.13) da G = 0, lo
cual es incorrecto.
Cuando la mutua interrelación ligaduras internas-ligaduras externas no
tiene como resultado la cancelación de todo posible movimiento interno
no será G = 0, sino G > 0. En este caso debemos caracterizar la estabilidad del sistema mediante HE y GI , y deducir el auténtico valor de G
analizando los movimientos no cancelados del sistema. El cálculo de G
usando la ec. (5.13) ó H usando la ec. (5.14) no tiene otro significado que el hecho de que el sistema, con los mismos vı́nculos distribuidos
de otra forma, serı́a potencialmente isostático (G = 0) o hiperestático
(H > 0). Denominarı́amos a tal sistema pseudoisostático o pseudohiperestático, según sea C = 3N (véase la fig. 5.8) ó C > 3N (véase la fig. 5.9),
respectivamente.
(vii) HE > 0, GI = 0 y H > 0 (véase la fig. 5.13). Este caso es similar al
anterior. De nuevo es H > 0, y el sistema es globalmente hiperestático.
DP
(viii) GE = 0, GI > 0 y G > 0 (véase las figs. 5.14 y 5.15). En este caso
la mutua influencia entre los vı́nculos externos e internos no impide que
subsistan movimientos relativos en el sistema. El sistema será globalmente
inestable.
FIGURA 5.11: Sistema de tipo (v)
con GE = 1, HI = 3 y, por inspección, G = 1.
(ix) GE > 0, GI = 0 y G > 0 (véase la fig. 5.16). En este caso los movimientos
relativos entre sólidos están suprimidos, pero el sistema se puede mover
como un conjunto rı́gido, debido a la insuficiencia numérica de las coacciones ejercidas por los vı́nculos externos. Por tanto, G > 0, y el sistema
es globalmente inestable.
Grados de libertad y estabilidad de un sistema de sólidos rı́gidos
5.4.5.
147
Sistemas propia e impropiamente ligados
FIGURA 5.12: Sistema de tipo (vi)
con GE = 0, HI = 1 y H = 1.
DP
TO
.F
ISI
CA
AP
LIC
AD
AI
I-
Diremos que un sistema de sólidos está propiamente ligado cuando las ligaduras, por su número, tipo, distribución y disposición, son capaces de impedir eficazmente todo movimiento del sistema. En caso contrario, el sistema
estará impropiamente ligado.
Opcionalmente, podemos hablar también de ligaduras propias e impropias:
cuando la ligadura que se considere impide eficazmente el movimiento del sistema contra el cual dicha ligadura ejerce su coacción y para el cual ha sido prevista, diremos que se trata de una ligadura propia, o mejor dicho, propiamente
establecida. Si no es el caso, la ligadura será impropia o estará impropiamente
establecida.
El concepto de sistema propia o impropiamente ligado tiene sentido si se
admite que lo que uno persigue al establecer ligaduras en un sistema es inmovilizarlo por completo: resultarı́a un tanto extraño suponer que una puerta
que puede abrirse y cerrarse gracias a las bisagras que la sujetan al marco
está impropiamente ligada, cuando cumple “con propiedad” la función para
la que se ha concebido. Lo mismo podrı́a decirse de cualquier mecanismo: un
motor, un reloj mecánico, una grúa, un camión con veinticuatro ruedas, un
paraguas. . . Por tanto, hay que entender los términos propio e impropio en un
sentido abstracto, exento de matices de valoración.
Ahora bien, es en el ámbito arquitectónico y constructivo, en que lo que
prima es que las estructuras sean rı́gidas e inmóviles, donde el concepto gana
fuerza y matices. Y en ese contexto, un sistema en el que el número de ligaduras es inferior al estrictamente necesario para evitar todo movimiento ha de
considerarse impropiamente ligado.
Más interesante es hacer notar que un sistema de sólidos en el que el número
de ligaduras sea igual o superior al estrictamente necesario para cancelar todo
movimiento puede, no obstante, estar impropiamente ligado, ya sea porque el
tipo o naturaleza de los vı́nculos no es el adecuado, porque estén mal distribuidos, porque estén mal dispuestos (mal orientados) en el lugar en el que actúan,
o por varias de estas razones a un tiempo. Como ejemplos fáciles de visualizar,
aquellos sistemas planos cuyas fuerzas de reacción vincular externas sean de
dirección dada y todas paralelas (por ejemplo, apoyos simples ad hoc) son externamente inestables, dado que ello implica la posibilidad de que tales sistemas
efectúen traslaciones en dirección perpendicular a esas reacciones. También, si
las fuerzas de reacción vincular externas de un sistema son concurrentes en un
punto, el sistema será externamente inestable, puesto que subsiste la posibilidad de que tenga lugar un giro respecto al punto de concurrencia. O también:
un sistema en el que GE = 2 y HI = 17, pongamos por caso, está excesivamente ligado y rigidizado internamente, y sin embargo está deficientemente ligado
externamente, razón por la que puede moverse como un todo. En la pregunta anterior hemos analizado cómo una deficiente estabilidad interna o externa
puede comprometer la estabilidad global de un sistema. Todas esas situaciones
corresponden a sistemas impropiamente ligados.
En conclusión: a la hora de elegir el número de vı́nculos, su tipo, su distribución y su orientación, habrá que tener cuidado para evitar estas situaciones
y otras que pudieran comprometer la estabilidad de los sistemas de sólidos
utilizados en la construcción (por ejemplo, las estructuras articuladas).
EU
AT
5.4
FIGURA 5.13: Sistema de tipo (vii)
con HE = 2, GI = 0 y H = 2.
FIGURA 5.14: Sistema de tipo (viii)
con GE = 0, GI = 1 y G = 1.
FIGURA 5.15: Sistema de tipo (viii)
con GE = 0, GI = 1 y G = 1.
FIGURA 5.16: Sistema de tipo (ix)
con GE = 1, GI = 0 y G = 1.
Estática de los sistemas de sólidos rı́gidos
EU
AT
148
PROBLEMA RESUELTO 5.3:
I-
√
Las varillas homogéneas AC y BC, de peso P y longitud 2 m están articuladas
en C. En los puntos A y B existen apoyos sin rozamiento y están conectados entre
sı́ mediante un resorte de longitud natural 1 m y constante elástica 3 kp/m.
(a) Clasifica el sistema atendiendo a su estabilidad interna, externa y global.
AD
AI
(b) Determina el valor del peso P de cada varilla para que en C se forme un
ángulo recto.
Si se sustituye el resorte por un hilo ideal tenso de 2 m de longitud, y el peso de
cada varilla es de 58,8 N.
(c) Clasifica el sistema atendiendo a su estabilidad interna, externa y global.
C
AP
LIC
(d) Determina la tensión del hilo.
A
CA
PROBLEMA RESUELTO 5.3
B
Solución:
TO
.F
ISI
(a) Tenemos que:
GE = 3 − CE = 3 − [1(A) + 1(B)] = 1.
Sistema inestable externamente o de sustentación.
GI = 3N − 3 − CI = 3 × 2 − 3 − [2(C)] = 1.
Sistema inestable internamente o de constitución.
DP
G = GE + GI = 2.
Sistema globalmente inestable.
(b) Si el ángulo en C es 90◦ , como sabemos también la longitud de las barras,
podemos
por el teorema de Pitágoras la separación entre los apoyos:
q determinar
√
2
AB = 2 ( 2) = 2 m.
Y esa es también la longitud actual del muelle (de longitud natural 1 m), de modo que la fuerza que está ejerciendo el muelle vale Fmuelle = k|lact − lnat | =
3 kp/m |2 − 1| m = 3 kp.
En esas condiciones, nos piden cuál debe ser el peso P de las barras. Para ello,
debemos generar ecuaciones de equilibrio donde aparezca el peso P .
Grados de libertad y estabilidad de un sistema de sólidos rı́gidos
149
Si probamos con las ecuaciones del sistema completo, que evitan los vı́nculos internos (la articulación en C) y las fuerzas activas internas (la del muelle en este caso),
parece que vamos a disponer de 3 ecuaciones con 3 incógnitas (φA , φB y P ), pero
vamos a ver qué es lo que pasa realmente. Para ello, dibujamos el diagrama de
sólido libre correspondiente al sistema completo:
De donde planteamos las siguientes ecuaciones de equilibrio:
X
Fx = 0 :
−2P + φA + φB = 0,
MCz = 0 :
2m
←
P
2m
y
+
←
P
x
A
0,5 m
0,5 m
B
0,5 m 0,5 m
←
fA
I-
fB
(P3.1)
FIGURA P3a: Resolución del apartado (b) del problema 5-1. Sistema
completo.
AD
AI
X
Fy = 0 :
C
←
0 = 0,
X
EU
AT
5.4
P 0,5 − P 0,5 − φA 1 + φB 1 = 0,
(P3.2)
(P3.3)
φA = φB = P.
LIC
resultando ası́ un sistema de dos ecuaciones independientes con 3 incógnitas, que
resolvemos en función de una de ellas, P :
(P3.4)
AP
Resulta ası́ que la simetrı́a de la situación a “inutilizado” una de las ecuaciones
de equilibrio, y no nos queda otro remedio que fragmentar el sistema para generar
las ecuaciones de equilibrio de una de las barras. En principio, parece que nos
bastará con una sola de sus ecuaciones, pero hay que pensar que al fragmentar
aparecen nuevas incógnitas de reacción (las de los vı́nculos internos), que necesitan
de más ecuaciones para poder resolver.
CA
Ası́, dibujamos el diagrama de sólido libre de la barra AC (en principio, se puede
escoger cualquiera de los fragmentos, eligiendo el que sea más simple de estudiar
—y contenga por supuesto las incógnitas de interés—, pero en este caso podemos
ver que da igual coger una u otra barra por la simetrı́a de este problema):
TO
.F
ISI
De donde planteamos las siguientes ecuaciones de equilibrio:
X
Fx = 0 :
X
X
Fy = 0 :
(P3.5)
−P + φA + φCy = 0,
(P3.6)
Fmuelle 1 + P 0,5 − φA 1 = 0.
(P3.7)
MCz = 0 :
Y sustituyendo valores hallados anteriormente:
DP
1
3 + P − P = 0,
2
fC x
fC y
C
y
+
2m
x
←
←
Fmuelle
A
0,5 m
P
0,5 m
←
fA
FIGURA P3b: Resolución del apartado (b). Barra AC.
Fmuelle − φCx = 0,
φCx = = 3 kp,
φCy = 0,
←
←
(P3.8)
(P3.9)
(P3.10)
hallando de la ec. (P3.10) que P = 6 kp. Sólo nos hizo falta la ecuación de
momentos para hallar la incógnita del peso de las barras, aunque de paso hemos
~ AC = (−3, 0) kp = −φ
~ CB .
calculado la reacción en la articulación interna C: φ
C
C
Estática de los sistemas de sólidos rı́gidos
EU
AT
150
(c) Ahora el cable es una ligadura (interna) que influye en la estabilidad y grados
de libertad del sistema, a diferencia del muelle en la situación anterior, que no
influı́a en la estabilidad ni en los grados de libertad del sistema:
GE = 3 − CE = 3 − [1(A) + 1(B)] = 1.
Sistema inestable externamente o de sustentación (igual que antes).
I-
GI = 3N − 3 − CI = 3 × 2 − 3 − [2(C) + 1(cable AB)] = 0.
Sistema isostático internamente o de constitución.
←
fC y
C
fC x
45o
2m
←
6 kp
0,5 m
45o
-fC y
y
+
2m
6 kp
←
T
x
0,5 m
(d) Al ser el hilo de 2 m de longitud, la configuración del sistema de barras es
idéntica al apartado (b), formando 90◦ una barra respecto de la otra. El peso de
las barras no es ahora desconocido, sino que vale P = 58,8 N = 6 kp, precisamente.
-fC x
←
T
A
←
C
B
0,5 m 0,5 m
←
←
fA
fB
Planteamos entonces las siguientes ecuaciones de equilibrio:
X
Fx(AC) = 0 :
AP
FIGURA P3c: Resolución del apartado (d).
Como la tensión del hilo es una ligadura interna, no queda otro remedio que fragmentar el sistema en las dos barras (o en una de las barras por un lado y el sistema
completo por el otro, como en el apartado (b)), para que ésta aparezca en los
diagramas de sólido libre y sus ecuaciones correspondientes:
LIC
←
AD
AI
G = GE + GI = 1.
Sistema globalmente inestable (pero con un grado de libertad menos que
antes).
TO
.F
ISI
CA
X
Fy(AC)
(AC)
MCz
X
Fx(CB) = 0 :
X
Fy(CB)
(CB)
MCz
(P3.11)
−6 + φA + φCy = 0,
(P3.12)
T 1 + 6 0,5 − φA 1 = 0,
(P3.13)
−T + φCx = 0,
(P3.14)
−6 + φB − φCy = 0,
(P3.15)
−T 1 − 6 0,5 + φB 1 = 0.
(P3.16)
=0:
X
X
T − φCx = 0,
=0:
=0:
=0:
Como vemos que las ecs. (P3.11) y (P3.14) son iguales salvo signo (consecuencia
de la simetrı́a de la situación), tenemos un sistema de 5 ecuaciones independientes
con 5 incógnitas: {T, φA , φB , φCx , φCy }.
DP
El sistema se puede resolver de la siguiente forma:
(P3.12) + (P3.15) :
(P3.13) + (P3.16) :
−12 + φA + φB = 0,
(P3.17)
−φA + φB = 0,
(P3.18)
Grados de libertad y estabilidad de un sistema de sólidos rı́gidos
151
y de la ec. (P3.18) deducimos que φA = φB (lógico por la simetrı́a; también se
deducı́a en el apartado (b), pero de las ecuaciones del sistema completo); sustituyendo en (P3.17) obtenemos φA = φB = 6 kp, que sustituido en (P3.13) ó (P3.16)
nos determina por fin la tensión del cable:
T = 3 kp,
(P3.19)
AD
AI
I-
que vemos coincide con la fuerza que en el apartado (b) ejercı́a el muelle en cada
barra. Esto era de esperar porque, comparando ambos apartados, los pesos de las
barras son iguales y su configuración también, aunque antes fuera mantenida por
un muelle y ahora lo sea por un hilo.
EU
AT
5.4
De paso, y para terminar, obtenemos de las ecs. (P3.11) y (P3.12) ó (P3.15), la
~ AC = (−3, 0) kp = −φ
~ CB , como en el
reacción en la articulación interna C: φ
C
C
apartado (b), lógicamente.
LIC
PROBLEMA RESUELTO 5.4:
CA
AP
La figura representa una grúa formada por dos barras rı́gidas de longitudes L
y l = L2 . La primera está articulada en el extremo A y sostiene por su otro extremo
la carga P . La segunda está ligada a la primera mediante una deslizadera móvil M
(sin rozamiento); y por su otro extremo está soldada con un ángulo fijo α = 30◦ a
la deslizadera (rı́gida) R, que puede deslizar sin rozamiento en la vertical que pasa
por A. El peso de las barras puede considerarse despreciable frente al de las cargas
que puede elevar. La maquinaria de la grúa ejerce una fuerza vertical F sobre la
deslizadera rı́gida R para mantener suspendida la carga.
(a) Clasifica el sistema atendiendo a su estabilidad interna, externa y global.
TO
.F
ISI
(b) Calcula el ángulo θ al que trabaja la grúa si es F =
reacción en los vı́nculos A, M y R en ese caso.
P
2
, y las incógnitas de
(c) Si queremos que la maquinaria de la grúa siempre trabaje ejerciendo fuerzas
F por debajo de la mitad de la carga P suspendida, calcula el rango de
alturas del punto B respecto del A.
(d) Si la soldadura en R no es capaz de soportar momentos de reacción superiores
a 1000 Kp m, ¿cuál es la mayor carga P que puede sostener la grúa en las
condiciones del apartado (b)?
Solución:
DP
(a) Considerando la grúa como un sistema plano formado por las barras AB y
M R, tenemos que:
HE = |3 − CE | = |3 − [2(A) + 2(R)]| = 1.
Sistema hiperestático externamente o de sustentación.
GI = 3N − 3 − CI = 3 × 2 − 3 − [1(M )] = 2.
Sistema inestable internamente o de constitución.
Estática de los sistemas de sólidos rı́gidos
EU
AT
152
←
F
B
R
P
a
I-
L
AD
AI
l
M
←
R f
R
←
P
α
L
l
←
fM
←
-fM
q
q
←
M
M
fA y
q
A
←
fA x
(b) Empleamos el método de fragmentación (véase la fig. P4a):
Se ha tenido en cuenta que la deslizadera móvil M es una ligadura interna, por
lo que en aplicación de la tercera ley de Newton genera en M dos fuerzas iguales, de sentido contrario, aplicadas en cada uno de los cuerpos; y que éstas son
perpendiculares a la guı́a (y eje) de la barra AB.
Las incógnitas de reacción vincular son:
barra AB:
~ A = (φAx , φAy )
• articulación externa en A: φ
~ M = (φM cos θ, φM sen θ)
• deslizadera móvil en M : φ
barra M R:
~M
• deslizadera móvil en M: −φ
~ R = (φRx , 0), M
~ R = (0, 0, MR ).
• deslizadera rı́gida en R: φ
TO
.F
ISI
FIGURA P4a: Resolución del apartado (b).
Por inspección, G = 1.
Sistema globalmente inestable.
AP
←
MR
CA
←
F
B
A
LIC
PROBLEMA RESUELTO 5.4
q
~ M como φ
~ R son perpendiculares a las respectivas guı́as por
Obsérvese que tanto φ
las que deslizan las correderas.
DP
Las ecuaciones de equilibrio para la barra AB, eligiendo los ejes horizontal y vertical
como x e y respectivamente, y tomando momentos en A, resultan:
φAx − φM cos θ = 0,
φAy − φM sen θ − P = 0,
P L sen θ + φM AM = 0..
(P4.1)
(P4.2)
(P4.3)
△
AM se halla geométricamente del triángulo AM R, al igualar su altura horizontal
calculada por un lado como cateto opuesto al ángulo α, y por otro como cateto
opuesto al ángulo θ:
l sen α = AM sen θ;
sen α
l.
AM =
sen θ
(P4.4)
(P4.5)
Grados de libertad y estabilidad de un sistema de sólidos rı́gidos
153
Las ecuaciones de equilibrio para la barra M R, con los ejes coordenados anteriores
y tomando momentos en el punto M , son:
φM cos θ + φR = 0,
(P4.6)
F + φM sen θ = 0,
MR + F l sen θ − φR l cos θ = 0.
(P4.7)
(P4.8)
EU
AT
5.4
I-
√
= 0,
= 0,
(P4.9)
(P4.10)
= 0,
(P4.11)
= 0,
(P4.12)
= 0,
(P4.13)
LIC
φAx − φM cos θ
φAy − φM sen θ − P
1
P L sen θ + φM
L
4 sen θ
φM cos θ + φR
1
P + φM sen θ
2
√
3
1
1
MR + P L − φ R L
2
4
4
AD
AI
Sustituyendo los valores conocidos, l = L2 , α = 30◦ (sen 30◦ = 21 , cos 30◦ = 23 )
y F = P2 (para este apartado (b)), nos quedan las siguientes ecuaciones, teniendo
1
en cuenta que ahora serı́a AM = 4 sen
θ L:
= 0.
(P4.14)
AP
Tenemos ası́ 6 ecuaciones con 6 incógnitas, justo las que nos piden en este apartado:
θ, φAx , φAy , φM , φR , MR ; la primera incógnita es de configuración y las otras
5 de reacción; P y L son datos paramétricos.
Resolvemos de la siguiente forma:
1
(i) De la ec. (P4.13): φM = − 2 sen
θP;
3
(iii) de donde resulta sen θ =
1
8
1
1
2 sen θ P 4 sen θ L
CA
(ii) sustituyendo en la ec. (P4.11): P L sen θ −
= 0;
◦
y θ = 30 (= α).
(iv) Sustituyendo en (I) resulta: φM = −P (su sentido es opuesto al dibujado en
ambas barras);
TO
.F
ISI
(v) sustituyendo (III) y (IV) en (P4.9) resulta: φAx = −
(vi) sustituyendo (III) y (IV) en (P4.10) resulta:
(vii) sustituyendo (III) y (IV) en (P4.12) resulta:
√
3
2 P
(sentido opuesto);
φAy = 12 P ;
√
φR = 23 P ;
(viii) sustituyendo (III) y (IV) en (P4.14) [la ec. (P4.13) da el mismo resultado que
(IV)] resulta: MR = 14 P L.
Si queremos expresar las incógnitas de fuerza de reacción
en forma vectorial,
en
√
√
3
3
1
~
~
los ejes elegidos resultarı́a lo siguiente: φA = − 2 P, 2 P ; φR =
P,
0
;
2
√
3
1
~ AB =
~M R
~ R = 0, 0, 1 P L ; φ
M
M
4
2 P, 2 P = −φM .
DP
(c) La altura del punto B respecto del A viene dada por hAB = L cos θ.
Usando las ecs. (P4.3), (P4.5) y (P4.7), pero sustituyéndoles los datos l = L2 y
α = 30◦ , aunque no F = P2 , pues ahora sólo queremos que F ≤ P2 , nos queda:
(i) De (P4.7): φM = − sen1 θ F ;
(ii) sustituyendo en (P4.3)+(P4.5): P L sen θ −
1
1
sen θ F 4 sen θ L
= 0;
Estática de los sistemas de sólidos rı́gidos
(iii) resulta para θ entonces que: sen3 θ =
EU
AT
154
1F
4P
.
F
≤ 2 ⇒ sen3 θ ≤ 81 ⇒ sen θ ≤ 21 ⇒
Finalmente, imponemos que F ≤ P2 ⇔ P
√
√
3
3
◦
θ ≤ 30 ⇒ cos θ ≥ 2 ⇒ hAB ≥ 2 L, de donde nos ha salido el rango de valores de hAB que buscábamos (evidentemente también está acotada superiormente:
hAB < L).
AD
AI
I-
(d) Si queremos que la grúa funcione sin que se rompa la soldadura que hay en R,
y si F = 21 P , entonces |MR | ≤ Mmax . En ese caso, como siguen siendo válidos
los resultados del apartado (b), MR = 41 P L, y la desigualdad se traduce en
4Mmax
1
.
4 P L ≤ Mmax ⇔ P ≤
L
Para Mmax = 1000 kp m resulta finalmente P ≤ 4000
L kp (si L está en metros) para
el rango de cargas que puede sostener la grúa. Se observa que cuanto más largo
sea el brazo de la grúa, L, menor será el rango permitido de cargas que se pueden
elevar.
LIC
PROBLEMA RESUELTO 5.5:
AP
En el sistema de sólidos rı́gidos que se muestra en la figura, las barras AB y CD
son idénticas, de longitud L y de peso P . El peso de la barra BC es, en cambio,
despreciable. En A hay un apoyo simple, en B y C articulaciones, y en D un
empotramiento.
(a) Clasifica el sistema atendiendo a su estabilidad interna, externa y global.
CA
En el punto medio de la barra AB se aplica una fuerza F~ que forma un ángulo de
60◦ con la horizontal. Determina:
(b) El módulo de F~ para que la situación mostrada en la figura sea de equilibrio.
TO
.F
ISI
(c) Las fuerzas de reacción vincular en A y en D ejercidas sobre las barras, y el
momento del empotramiento en D en esta situación de equilibrio.
(d) Las fuerzas de reacción vincular ejercidas en B y en C sobre la barra BC en
esta situación de equilibrio.
B
←
C
F
60o
A
30o
30o
D
PROBLEMA RESUELTO 5.5
DP
Solución:
(a) Teniendo en cuenta que la barra BC es dóblemente articulada y de peso despreciable, se puede considerar como un vı́nculo tipo biela, en vez de un tercer
sólido del sistema. Entonces resulta que el sistema de dos sólidos (barras AB y
CD) tiene:
Grados de libertad y estabilidad de un sistema de sólidos rı́gidos
155
HE = |3 − [1(A) + 3(D)]| = 1, es hiperestático de sustentación o externo.
GI = 3 × 2 − 3 − [1(biela BC)] = 2, es mecanismo de constitución o interno.
G = GE + GI = 1, es mecanismo globalmente.
←
I-
(b) Como el sistema es un mecanismo con un grado de libertad, es natural que nos
pregunten por el valor de una fuerza activa para que se mantenga la configuración
(en equilibrio) con el valor del grado de libertad que indique la figura.
EU
AT
5.4
AD
AI
Y si está el sistema en equilibrio, podemos usar el método de fragmentación para
generar ecuaciones de fuerza de donde hallar el módulo F de la fuerza activa —su
dirección viene dada por la figura: 60◦ con la horizontal—.
X
F cos 60◦ − φbiela
= 0,
B
(P5.1)
F sen 60◦ − P + φA = 0,
(P5.2)
Fy = 0 :
MAz = 0 :
AP
X
LIC
Si tomamos como fragmento la barra AB, sólo con sus 3 ecuaciones de equilibrio
podremos hallar F y dos incógnitas de reacción, la del apoyo en A y la de la
biela BC en B:
Teniendo en cuenta la fig. P5a, F~ = (F cos 60◦ , F sen 60◦ ), y quedan las siguientes
ecuaciones de equilibrio:
X
Fx = 0 :
F ( L2 sen 30◦ ) − P ( L2 cos 30◦ ) +
φbiela
(L sen 30◦ ) = 0.
B
(P5.3)
CA
Sustituyendo valores conocidos (P se supone que es un parámetro) resulta:
1
− φbiela
= 0,
B
2
√
3
F
− P + φA = 0,
2
√
3
1
1
F L−P
L + φbiela
L = 0,
B
4
4
2
TO
.F
ISI
F
(P5.4)
(P5.5)
(P5.6)
DP
es decir, 3 ecuaciones con 3 incógnitas: F , φbiela
y φA . Las soluciones son las
B
siguientes:
√
3
P,
(P5.7)
F =
2
√
3
φbiela
=
P,
(P5.8)
B
4
1
φA = P.
(P5.9)
4
Y la respuesta a este apartado (b) es F =
√
3
2 P.
(c) La reacción en A, φA , ya la hemos hallado en el anterior apartado, de modo
~ A = (0, P ). Y para hallar la
que la fuerza de reacción en forma vectorial queda φ
4
fuerza de reacción y el momento de reacción en el empotramiento D necesitamos
←
F
30o
30o
G
←
fA
o
A
30
30o
fBbiela B
←
P
y
+
x
FIGURA P5a: Resolución del apartado (b).
Estática de los sistemas de sólidos rı́gidos
EU
AT
156
más ecuaciones de equilibrio, que van a ser las del fragmento barra CD (también valdrı́an las del sistema completo, pero en este caso tienen una complicación
añadida: desconocemos la longitud de la biela BC):
De donde:
y
x
←
fD y
←
P
Fy = 0 :
X
+
G
X
m
←
FIGURA P5b: Resolución del apartado (c).
−P + φDy = 0,
(P5.11)
(Lsen 30◦ ) +
P ( L2 cos 30◦ ) − φbiela
B
emp D
µ
= 0.
Sustituyendo valores conocidos (del apartado anterior, φbiela
=
B
√
3
P − φDx = 0,
4
−P + φDy = 0,
√
√
3
3
P
L−
P 12L + µemp D = 0,
4
4
LIC
fD x D
(P5.10)
MDz = 0 :
←emp D
30o
φbiela
− φDx = 0,
B
I-
- fBbiela
Fx = 0 :
AD
AI
←
C
X
(P5.12)
√
3
4 P ):
(P5.13)
(P5.14)
(P5.15)
CA
AP
de donde obtenemos:
~ D = (−
Y vectorialmente: φ
φDx =
µemp D
√
3
4 P, P ),
√
3
P,
4
= P,
(P5.16)
φDy
√
3
P L.
=−
8
µ
~ emp D = (0, 0, −
(P5.17)
(P5.18)
√
3
8 P L).
DP
TO
.F
ISI
(d) Las fuerzas de reacción en B y C sobre la barra BC son las fuerzas de reacción
de la biela BC, cuyo módulo común hallamos en el apartado (b), pero considerando
su efecto sobre la propia biela BC, que viene dado por el Principio de Acción y
Reacción:
!
√
3
BC
AB
biela
~
~
~
φB = −φB = −φB =
P, 0 ,
(P5.19)
4
!
√
3
BC
CD
biela
~
~
~
P, 0 .
(P5.20)
φ
= −φ
= −(−φ
)= −
C
C
B
4
PROBLEMA RESUELTO 5.6:
La barra de la figura, de peso 10 N y longitud L, se encuentra apoyada sin rozamiento en el punto A, forma 30◦ con la horizontal y está sometida a la acción de
Grados de libertad y estabilidad de un sistema de sólidos rı́gidos
157
√
una fuerza horizontal F = 6 3 N en su punto medio. El extremo opuesto B se
encuentra articulado a un bloque homogéneo de peso P que se apoya sobre una
superficie con rozamiento. El coeficiente de rozamiento estático entre el bloque y
el suelo es µ = 1.
(a) Suponiendo que el sistema se encuentra en equilibrio, determina:
AD
AI
I-
1. Los vectores fuerza de reacción vincular que actúan sobre la barra en
los puntos A y B.
2. El vector fuerza de reacción vincular que actúa en el apoyo con rozamiento y su punto de aplicación, en función del peso P del bloque.
EU
AT
5.4
(b) Calcula el rango de valores de P para el cual el sistema se encuentra en
equilibrio.
B
2m
←
F
LIC
1m
30º
A
AP
Solución:
PROBLEMA RESUELTO 5.6
Fx = 0 :
X
Fy = 0 :
(P6.1)
−PAB + φBy + φA = 0,
(P6.2)
−φA (L cos 30◦ ) + PAB L2 cos 30◦ +
F L2 sen 30◦ = 0,
(P6.3)
F − FR = 0,
(P6.4)
−P + N − PAB + φA = 0,
(P6.5)
MBz = 0 :
X
Fx = 0 :
X
Fy = 0 :
DP
X
F − φBx = 0,
TO
.F
ISI
X
CA
(a) En el equilibrio aplicamos el método de fragmentación para generar ecuaciones
de fuerza, eligiendo como fragmentos la barra AB por un lado (para que aparezcan
las incógnitas de reacción de la articulación interna B que nos piden) y, por otro
lado, el sistema completo barra-bloque:
X
MOz = 0 :
−F 21 + PAB L2 cos 30◦ + 1 +
φA (L cos 30◦ + 1) + N x = 0.
(P6.6)
Estática de los sistemas de sólidos rı́gidos
EU
AT
158
←
←
30º
←
fA
A
GAB
←
y
F
PAB
x
+
2m
L
GAB
←
N
G
←
1m
←
F
←
30º P
AB
P
O
←
FR
x
−P + N − 10 + φA = 0,
√
√ 1
3
−6 3 + 10(
+ 1)−
2 √
2
φA ( 3 + 1) + N x = 0.
LIC
FIGURA P6a: Resolución del apartado (a).
Sustituyendo valores conocidos, teniendo en cuenta que L, la longitud de la barra AB, puede hallarse de la fig. (P6a) (al ser L sen 30◦ = 1 m, es L = 2 m), y
simplificando, resulta:
√
(P6.7)
6 3 − φBx = 0,
−10 + φBy + φA = 0,
(P6.8)
10 6
+ = 0,
(P6.9)
−φA +
2
√2
6 3 − FR = 0,
(P6.10)
I-
fA
A
B
AD
AI
fB x
L
←
También podrı́amos haber elegido el bloque como segundo fragmento. Veremos
que una ventaja de nuestra elección es que pueden resolverse por un lado las
3 primeras ecuaciones para obtener las incógnitas que nos piden en (a.1), y por
otro las 3 últimas para obtener las incógnitas de (a.2).
fB y
←
(P6.11)
(P6.12)
AP
Es un sistema de 6 ecuaciones y 6 incógnitas: φBx , φBy , φA , FR , N y x (P es
un dato). De la ec. (P6.9): √
φA = 8 N. Sustituyendo en la ec. (P6.8): φBy = 2 N.
De la ec. (P6.7): φBx = 6 3 N. Vectorialmente, la solución del apartado (a.1)
√
√
~ A = (0, 8) N, φ
~ AB = (−6 3, 2) N. De la ec. (P6.10): FR = 6 3 N. De la
es: φ
B
√
3−2
ec. (P6.11): N = 2 + P N. De la ec. (P6.12): x = 62+P
m. Vectorialmente, la
√
~ suelo = (−6 3, 2 + P ) N.
solución del apartado (a.2) es: φ
(b) Hay equilibrio mientras se cumplan las siguientes condiciones:
CA
FR ≤ µN (no deslizamiento).
−1 ≤ x ≤ 1 (no vuelco).
TO
.F
ISI
√
√
La primera condición implica 6 3 ≤ 1(2 + P ) ⇒ P ≥ 6 3 − 2 = 8,39 N. La
segunda condición equivale a dos condiciones:
√
x ≥ −1 ⇒ P ≥ −6 3 N la cual no nos añade nada porque se cumple al
presuponer P ≥ 0.
√
x ≤ 1 ⇒ P ≥ 6 3 − 2 = 6,39 N.
DP
Como el mayor de los dos mı́nimos de P es 8,39 N, el rango de valores de P que
mantiene el equilibrio será finalmente: P ≥ 8,39 N.
5.5.
Fragmentación interna del sólido rı́gido: Acciones interiores sobre una sección
En esta sección nuestro objetivo es determinar la relación que existe entre
las fuerzas exteriores (activas y de reacción vincular) que actúan sobre un sólido
Fragmentación interna del sólido rı́gido: Acciones interiores sobre una sección
I-
rı́gido y las fuerzas internas que se producen en él (y que lo mantienen ı́ntegro
e indeformable). Se trata de averiguar cómo responden las coacciones internas
que aseguran la rigidez del sólido frente a las fuerzas externas aplicadas.
Para ello se utiliza el método de fragmentación introducido en la sección 5.3
de la siguiente manera: (I) Se calculan todas las fuerzas exteriores (tanto activas
como de reacción vincular) que actúan sobre el sólido rı́gido. (II) Se fragmenta
el sólido rı́gido mediante un plano imaginario de sección S en dos fragmentos.
Cada uno de ellos se considera un sólido rı́gido “soldado” al otro fragmento por
la sección S.
Se llaman esfuerzos internos a las fuerzas entre los fragmentos imaginarios
de un sólido rı́gido.
Se llama método de las secciones al método de fragmentación aplicado al
cálculo de los esfuerzos internos.
El método de las secciones es el punto de partida para el estudio de la
Elasticidad y la Resistencia de Materiales, donde se calculan las deformaciones
y tensiones internas que sufren los sólidos reales sujetos a las fuerzas exteriores.
El método de las secciones no sirve para hallar ciertas fuerzas internas que
aparecen en los materiales rı́gidos pretensionados. En estos materiales se introduce una tensión interna durante su fabricación con objeto de que soporte mejor
ciertas cargas exteriores. Estos materiales son frecuentes en la construcción.
Supongamos un sólido rı́gido en equilibrio bajo la acción de fuerzas exteriores (activas y reacción vincular) conocidas. Lo seccionamos mentalmente (por
el lugar donde más interese conocer los esfuerzos internos) en dos partes, A
y B, mediante un plano, dando lugar a la sección S del sólido (ver fig. 5.17).
Cada fragmento estará en equilibrio bajo la acción de su correspondiente porción de fuerzas externas sólo si se restablecen las acciones internas que el otro
fragmento ejercı́a a través de S.
159
EU
AT
5.5
AD
AI
esfuerzos internos
←
←
FjAB
A
+
GS
+
TO
.F
ISI
Fi'
CA
AP
LIC
método de las secciones
B
←
Fi
DP
S
Denotaremos por F~i las fuerzas exteriores y por F~jAB los esfuerzos ejercidos
sobre el fragmento B por el fragmento A. Los esfuerzos constituyen un sistema
de fuerzas —de carácter deslizante— distribuidas por toda la sección S, y
~ aplicada en un punto —por
por tanto son reducibles a una fuerza resultante R,
ejemplo en el centroide de S, al que denotaremos por G—, más un par de fuerzas
FIGURA 5.17: Método de las secciones para revelar las acciones sobre
una sección.
Estática de los sistemas de sólidos rı́gidos
EU
AT
160
~ igual al momento en ese punto del sistema de fuerzas F~ AB :
de momento M
i
X
~ =
F~jAB ,
(5.15)
R
j∈S
~ =
M
X
~ G (F~jAB ).
M
(5.16)
I-
j∈S
AD
AI
~ yM
~ son las incógnitas de reacción que sustituyen a una
Consideraremos que R
acciones interiores sobre la sección “soldadura” entre A y B. Llamaremos acciones interiores sobre la sección S al
~ M
~ }.
par {R,
Nuestro objetivo es escribir estas incógnitas en función de las fuerzas exteriores (activas y de reacción vincular) —que suponemos conocidas—, usando
las ecuaciones de equilibrio que nos proporciona el método de fragmentación.
En particular, usaremos las ecuaciones de equilibrio de B:
X
X
F~jAB = ~0,
(5.17)
F~i +
j∈S
i∈B
~ G (F~i ) +
M
LIC
X
X
~ G (F~ AB ) = ~0,
M
j
AP
y las ecuaciones de equilibrio del sistema completo (A + B):
X
X
F~i = ~0,
F~k +
~ G (F~k ) +
M
(5.19)
i∈B
k∈A
X
(5.18)
j∈S
i∈B
X
~ G (F~i ) = ~0.
M
(5.20)
i∈B
k∈A
TO
.F
ISI
CA
De las ecs. (5.15) y (5.17), y de las ecs. (5.16) y (5.18) deducimos, respectivamente, que:
X
~ =−
F~i ,
(5.21)
R
i∈B
~ =−
M
X
~ G (F~i ),
M
(5.22)
i∈B
DP
que nos permiten despejar las fuerzas y momentos exteriores sobre B en función
de las fuerzas y momentos exteriores sobre A. Introduciendo estos resultados
en las ecs. (5.21) y (5.22), obtenemos
X
~ =
R
F~k ,
(5.23)
esfuerzo axial
k∈A
~ =
M
X
~ G (F~k ).
M
(5.24)
k∈A
Por tanto, las acciones interiores sobre una sección cualquiera del sólido rı́gido,
considerada como sección extrema de una de las partes, es equivalente al sistema
de fuerzas externas aplicadas sobre la otra parte.
Para terminar, conviene conocer la terminologı́a que se usa en Elasticidad y
Resistencia de Materiales. Cuando se descomponen las acciones interiores sobre
la sección S según un eje normal a S, y en el plano tangente a S.
Se llama esfuerzo axial o esfuerzo de tracción-compresión, y se denota
Fragmentación interna del sólido rı́gido: Acciones interiores sobre una sección
t2
←
Q
Mτ
←
N
B
GS
←
Mf
←
I-
←
+
RS
AD
AI
←
Fi
n
t1
←
MS
FIGURA 5.18: Componentes de las
acciones sobre una sección en los ejes
naturales de ésta.
AP
LIC
~ , a la componente de R
~ normal a S.
por N
~ a la componente de R
~ tanSe llama esfuerzo cortante, y se denota por Q,
gencial a S.
~ τ , a la componente de M
~
Se llama momento torsor, y se denota por M
normal a S.
~ f , a la componente de M
~
Se llama momento flector, y se denota por M
tangencial a S.
Evidentemente, se cumple
~ =N
~ + Q,
~
R
~ =M
~τ +M
~ f.
M
(5.25)
(5.26)
TO
.F
ISI
CA
Los adjetivos “axial”, “cortante”, “torsor” y “flector” describen qué tipo de
resistencia (a la tracción-compresión, al corte, a la torsión, a la flexión, respectivamente) realiza cada componente para contrarrestar las deformaciones
debidas a las fuerzas exteriores.
Esas 4 resistencias internas suelen actuar simultáneamente, pero hay situaciones especiales en las que predomina una o dos de ellas frente a las demás.
En esos casos, una buena aproximación consiste en suponer que sólo una o dos
de las 4 componentes son distintas de cero. Por ejemplo, cuando se estudian las
acciones interiores sobre las secciones transversales de vigas rectas horizontales
cargadas con cargas verticales en un plano longitudinal de simetrı́a, predominan los esfuerzos cortantes y momentos flectores, por lo que conviene considerar
nulos los esfuerzos axiales y los momentos torsores.
DP
161
EU
AT
5.5
esfuerzo cortante
momento torsor
momento flector
Estática de los sistemas de sólidos rı́gidos
EU
AT
162
Problemas propuestos
Se sabe que el módulo de la reacción en la articulación en B
puede ser, como máximo, 2×104 N y que el empotramiento
se rompe si el módulo del momento en el vı́nculo supera el
Un bloque homogéneo triangular de peso 3 N, arti- valor 3 × 103 N m. Con estos condicionantes,
culado en los puntos A y C, y que en el vértice B
sufre la acción de una fuerza F~ que forma 53◦ con la
(e) determina el valor máximo de la fuerza F que puede
horizontal.
aplicarse a la barra CD.
Una barra homogénea de 1 N de peso, articulada en
el punto C y apoyada sin rozamiento en el punto D.
(a) Clasifica el sistema atendiendo a su estabilidad interna, externa y global.
(b) Calcula el módulo de la fuerza F~ para que el sistema
se encuentre en equilibrio con la configuración de la figura.
Datos adicionales: sen 53◦ ≈
4
5;
cos 53◦ ≈
3
5.
6m
53o
C
B
CA
3m
AP
←
F
A
B
LIC
(c) Calcula las fuerzas de reacción vincular en A, C y D,
para la situación anterior.
AD
AI
I-
5.1. En la figura se muestra un sistema de sólidos rı́gidos
formado por:
15o
C
←
F
4m
A
D
4m
PROBLEMA 5.2
D
PROBLEMA 5.1
TO
.F
ISI
5.3. La grúa de la figura consta de un mástil vertical,
de peso de módulo P = 104 N, y dos brazos horizonta′
3
5.2. El sistema de sólidos que se muestra en la figura les, F B y BD, de pesos respectivos P1 = 2 × 10 N y
3
está formado por 3 barras homogéneas. En A, B y D exis- P2 = 5 × 10 N, siendo despreciables los grosores tanto del
ten articulaciones mientras que en C hay un empotramiento mástil como de los brazos. El mástil vertical está empotrao soldadura. Tan sólo la barra BC posee masa no despre- do en su extremo A, mientras que los brazos horizontales
′
ciable, de valor 103 kg. En el punto medio de la barra CD están unidos al mástil mediante articulaciones (B y B ) y
′
cables tensos (C E y CD). El contrapeso de la grúa situase aplica una fuerza puntual horizontal de módulo F .
do en el punto E es de módulo Q1 = 104 N. Si la carga
(a) Clasifica el sistema atendiendo a su estabilidad inter- que levanta la grúa es de módulo Q2 = 1,2 × 104 N,
na, externa y global.
DP
(b) Determina las fuerzas de reacción vincular en B y en D
que se ejercen sobre el sistema de sólidos, en función de F .
(a) clasifica el sistema de sólidos rı́gidos constituido por la
grúa atendiendo a su estabilidad externa, interna y global.
(c) Determina la fuerza que la barra AB ejerce sobre
la BC y la fuerza que la barra CD ejerce sobre la BC, en
función de F .
(b) calcula la fuerza y momento de reacción vincular en el
empotramiento A.
(d) Determina el momento en el empotramiento sufrido
por la barra BC, en función de F .
(c) calcula la tensión del cable CD y la reacción de la
articulación B sobre el brazo BD.
163
EU
AT
Problemas propuestos
AD
AI
I-
5.5. Un tablón AB, homogéneo, de peso P1 = 150 N y
longitud L1 = 5 m, se apoya sobre el suelo y sobre el
tablón CD, como se indica en la figura. La distancia CB
es 1 m, el coeficiente de rozamiento estático del apoyo del
tablón AB con el suelo es µ = 0,8 y el rozamiento es
despreciable en el apoyo en C. El tablón CD, homogéneo,
de peso P2 = 200 N y longitud L2 = 3 m, se encuentra
empotrado en el punto D.
(a) ¿Está el tablón AB en equilibrio? Justifica tu respuesta.
(b) Halla los vectores fuerza y momento de reacción vincular en el empotramiento D.
LIC
PROBLEMA 5.3
CA
AP
5.4. Dos piezas de máquina están conectadas por un pasador en el punto E, como se muestra en la figura. El pasador está sujeto a la pieza CD y desliza sin rozamiento
en una ranura existente en la pieza AB. Sobre CD se apli~ 1 = 150~k N m. En los
ca un par de fuerzas de momento M
puntos B y D existen articulaciones. La pieza AB tiene
longitud LAB = 6 m y peso PAB = 20 N, mientras que la
pieza CD tiene longitud LCD = 8 m y peso PCD = 50 N.
La distancia BD es h = 3 m y el ángulo que forma CD
con la horizontal, α, es 30◦ .
TO
.F
ISI
(a) Clasifica el sistema según su estabilidad interna, externa y global.
~ 2 del par que habrı́a que aplicar
(b) Halla el momento M
en la pieza AB para que el sistema estuviera en equilibrio.
B
C
30o
A
D
60o
PROBLEMA 5.5
(c) En el caso de que apliquemos dicho par, halla las fuer- 5.6. En la figura se muestra esquemáticamente un coberzas de reacción sobre las barras en los puntos B y D, y la tizo cuyo tejado CD (de longitud lCD = 6 m y peso PCD = 30 kp) se apoya sobre una plataforma horizontal
fuerza de reacción en E sobre la barra AB.
y sobre un paramento vertical AB (de longitud lAB = 4 m
y peso PAB = 40 kp) empotrado en el suelo en el punto A.
C
El apoyo en C es sin rozamiento mientras que el contacto
M2 B
en B tiene rozamiento con coeficiente µ. Calcula:
E
M1
a=30o
DP
A
PROBLEMA 5.4
D
h
(a) Las fuerzas de reacción vincular sobre la barra CD en
los puntos B y C y las reacciones sobre la barra AB en A,
suponiendo que el sistema está en equilibrio.
(b) El valor mı́nimo del coeficiente de rozamiento µ para
que el sistema esté en equilibrio.
Estática de los sistemas de sólidos rı́gidos
EU
AT
164
C
PROBLEMA 5.7
4,5 m
5.8. En la figura la viga homogénea AB, de peso P1 ,
está unida a la pared mediante una articulación y es soportada por un pilar homogéneo, de peso P2 = 10 × 103 kp
y altura h = 2 m. Una biela, que forma 53◦ con la horizontal, une el extremo B de la viga y el punto medio de la base
superior del pilar (C). Suponiendo que el pilar se apoya en
el suelo y que el coeficiente de rozamiento estático de dicho
apoyo es µ = 0,5:
1,5 m
B
I-
53o D
AD
AI
4m
A
(a) Halla el peso P1 máximo que puede tener la viga para
que el pilar pueda soportarla sin deslizar.
PROBLEMA 5.6
(b) Si el peso de la viga fuera P1 = 16 × 103 kp, halla cuál
debe ser la anchura b de la base del pilar para que no se
produzca el vuelco del mismo.
LIC
5.7. Se utiliza un par de cuñas para mover una caja de peso W (véase la figura). El coeficiente de rozamiento es el
mismo en todas las superficies y el peso de las cuñas es
Datos adicionales: sen 53◦ ≈ 54 ; cos 53◦ ≈ 35 .
despreciable. Determina
←
F
TO
.F
ISI
W
A
B
53o
C
CA
Datos adicionales: W = 2400 N, µ = 0,3.
AP
(a) El máximo valor de θ para que la cuña se mantenga
en su posición cuando F = 0.
(b) El valor del módulo de la fuerza F~ que habrá que aplicar a la cuña para introducirla, supuesto θ = 20◦ .
q
h = 2m
b
PROBLEMA 5.8
Cuestiones
DP
5.1. Sea un sistema mecánico plano formado por dos sólidos rı́gidos. Uno de ellos está vinculado con el exterior mediante una ligadura E. Además, los sólidos están vinculados
entre sı́ mediante una ligadura interna I. Indica cuál de las
siguientes combinaciones hace que el número de grados de
libertad global del sistema sea exactamente 3.
(a) E es un empotramiento e I una articulación.
(b) E es una deslizadera rı́gida e I una articulación.
(c) E es una articulación e I una biela.
(d) E e I son bielas.
5.2. Sea un sistema plano formado por N sólidos rı́gidos
vinculados entre sı́ y con el exterior. Entonces, se cumplirá que
165
(a) un número de coacciones externas mayor que 3 puede contribuir a impedir los movimientos relativos entre los
sólidos cuando el número de coacciones internas sea menor
que 3N − 3.
EU
AT
Cuestiones
hay fuerzas activas interiores y sobre el que actúa un sistema de fuerzas activas exteriores conocido,
(a) no es posible el equilibrio.
(b) en general, las ecuaciones de la Estática, por sı́ solas, permitirán resolver todas las incógnitas de reacción
vincular, tanto externas como internas.
I-
(b) un número de coacciones externas mayor que 3 contribuirá siempre a impedir los movimientos relativos entre
los sólidos cuando el número de coacciones internas sea
menor que 3N − 3.
(c) en general, las ecuaciones de la Estática, por sı́ solas,
no permitirán resolver todas las incógnitas de reacción vincular internas.
(d) si se suprime una cualquiera de las coacciones internas
el sistema siempre pasará a ser inestable de constitución.
(d) un número de coacciones internas mayor que 3N − 3
contribuirá siempre a impedir el movimiento del sistema
de sólidos como un todo cuando el número de coacciones
externas sea menor que 3.
5.5. Sea un sólido rı́gido en equilibrio y S una sección cualquiera que divida a éste en dos partes. Acerca de las acciones que una parte transmite a la otra a través de dicha
sección podemos afirmar que
(a) tiene que ser necesariamente inestable de constitución.
AP
(b) tiene que ser necesariamente inestable de sustentación.
(c) puede ser hiperestático de constitución.
(d) no puede ser hiperestático de sustentación.
TO
.F
ISI
CA
5.4. En un sistema de sólidos rı́gidos que es isostático de
sustentación e hiperestático de constitución, en el que no
DP
(a) son independientes de las fuerzas externas que actúan
sobre el sólido.
LIC
5.3. Un sistema globalmente inestable
AD
AI
(c) un número de coacciones internas mayor que 3N − 3
puede contribuir a impedir el movimiento del sistema de
sólidos como un todo cuando el número de coacciones
externas sea menor que 3.
(b) el esfuerzo cortante y el momento flector son ambos
tangentes a la sección S.
(c) los esfuerzos cortante y axial están contenidos en el
plano de la sección y los momentos flector y torsor son
perpendiculares a dicho plano.
(d) son nulas, dado que suponemos que el sólido está en
equilibrio.