Cap 02 – Criterios de Falla para Tensiones Combinadas
Anuncio

Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
Capítulo 2
CRITERIOS DE FALLA
PARA TENSIONES COMBINADAS
1 INTRODUCCIÓN
En los casos de estados de tensión estática uniaxial resulta muy sencillo predecir la condición
de falla o dimensionar la pieza de modo de evitar la falla. Para ello se utilizan los resultados que se
obtienen en un ensayo de tracción a partir de la curva de tensión -deformación.
Cuando el estado tensional es bidimensional o tridimensional la predicción de la falla ya no
resulta tan simple. Se requeriría una variedad de ensayos donde cada una de las componentes de
tensión se debería hacer variar en todo su rango de posibles valores y además tener en cuenta todas
las combinaciones posibles entre las distintas componentes. Estos complejos ensayos resultan
prohibitivos desde el punto de vista económico y aún imposibles desde el punto de vista físico para
muchas de las posibles combinaciones de tensiones.
Ante un problema tan complejo resulta justificado que se propongan teorías aproximadas
que relacionan el comportamiento de una cierta “variable” en el caso complejo con el
comportamiento de esa misma variable en un caso simple y verificable experimentalmente.
El ensayo simple que se utiliza habitualmente es el ensayo de tracción.
La característica común de los diferentes criterios de falla para tensiones combinadas es predecir
la falla cuando el valor de cierta variable física predeterminada, alcanza en el estado multiaxial un
valor igual al que dicha variable alcanza en el momento de la falla en un ensayo de tracción con el
mismo material.
Se han desarrollado docenas de criterios, algunos más exitosos que otros, que podemos agrupar
de la siguiente manera:
1)
2)
3)
4)
5)
Criterios basados en las tensiones.
Criterios basados en las deformaciones específicas.
Criterios basados en la energía de deformación.
Criterios empíricos.
Criterios que se basan en la estructura de la materia.
No existe ningún criterio que pueda aplicarse con éxito a todos los materiales. En realidad
cada material daría origen a su propia teoría de falla.
Los materiales isótropos pueden clasificarse en dúctiles y frágiles:
Los materiales dúctiles se adaptan muy bien a ciertos criterios, mientras que los materiales
frágiles se adaptan a criterios diferentes.
En este capítulo sólo se presentan los cuatro criterios que se utilizan con mayor frecuencia: de
la máxima tensión normal, de la máxima tensión de corte, de la energía de distorsión y de Mohr.
2 CRITERIO DE LA MÁXIMA TENSIÓN NORMAL ( CRITERIO DE RANKINE )
Se predice la falla en el estado tensional combinado cuando la tensión principal máxima
alcanza un valor igual a la tensión normal máxima en el momento de la falla en un ensayo uniaxial
( tracción o compresión ) usando una probeta del mismo material.
Considerando tensiones principales σ 1 ≥ σ 2 ≥ σ 3 este criterio predice la falla cuando:
σ1 ≥ σ t
o cuando
σ3 ≤ σc
(1)
donde σ t es la tensión de falla en tracción mientras que σ c es la tensión de falla en compresión.
31
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
Las tensiones de falla que se adoptan ( σ t y σ c ) dependen del modo de falla elegido ( fluencia,
rotura, límite de proporcionalidad, etc.) y del comportamiento del material.
Este criterio sólo considera la máxima tensión principal sin tener en cuenta para nada a las
restantes tensiones principales. Es un criterio muy pobre a los efectos de predecir el inicio de la
fluencia. Para el caso de presión hidrostática ( σ=
σ 3 ), este criterio predice la falla cuando
1 σ=
2
σ 1 = σ c , pero esta afirmación no se verifica experimentalmente para ningún material. Por el
contrario, aún para altísimas tensiones hidrostáticas no se verifica ninguna plastificación.
El criterio de Rankine no debe ser utilizada para materiales dúctiles.
En cambio es tal vez el mejor criterio para materiales frágiles.
Este criterio se adapta muy bien en el caso de fundición, existiendo muchos resultados
experimentales que lo confirman.
3 CRITERIO DE LA MÁXIMA TENSIÓN DE CORTE ( CRITERIO DE TRESCA )
Se predice la falla en el estado tensional combinado cuando la tensión de corte máxima alcanza
un valor igual a la tensión de corte máxima en el momento de falla en el ensayo de tracción usando
una probeta del mismo material.
Considerando las tensiones principales σ 1 ≥ σ 2 ≥ σ 3 se puede obtener la máxima tensión
cortante según la ecuación (45) del Capítulo 1:
=
τ max
1
2
(σ 1 − σ 3 )
(2)
Para el caso de tracción simple σ 2 = 0 y σ 3 = 0 y en el momento de falla se verifica que
τf =
1σ
2 f
(3)
De las dos últimas expresiones se deduce que el criterio de la máxima tensión cortante predice
la falla cuando
τ max ≥ 12 σ f
⇔
σ1 − σ 3 ≥ σ f
(4)
El criterio de Tresca es satisfactorio para materiales dúctiles.
En realidad existe sólo un criterio, el de la energía de distorsión, que concuerda mejor con los
resultados experimentales que el criterio de corte máximo en el caso de tensiones combinadas.
Al aplicar el criterio de Tresca al caso de compresión/tracción hidrostática ( σ1 = σ2 = σ3) a
tensiones superiores a σf, este criterio no predice falla lo que se ve corroborado por los
experimentos. A modo de ejemplo se puede verificar que (4) no predice falla para el estado: σ1 = 9 σf ,
σ2 = 8,5 σf , σ3 = 8,01 σf .
Notar que si σ1 y σ3 son de igual signo existen casos que no producen falla donde σ1 > σf ; por
ejemplo, cuando σ1 = 1,1 σf , σ2 = 0,9 σf y σ3 = 0,2 σf , el criterio (4) no predice falla.
Notar también que si σ1 y σ3 son de distinto signo pueden darse casos de falla aun cuando las
tres tensiones principales sean bastante inferiores a σf ; por ejemplo, cuando σ1 = 0,6 σf , σ2 = 0,2 σf,
σ3 = – 0,5 σf el criterio (4) predice falla ( lo cual es correcto).
4 CRITERIO DE LA ENERGÍA DE DISTORSIÓN ( CRITERIO DE VON MISES )
Se predice la falla en el estado tensional combinado cuando la energía de distorsión por
unidad de volumen alcanza el valor de la energía de distorsión por unidad de volumen en el
momento de falla en el ensayo de tracción usando una probeta del mismo material.
El criterio de Von Mises se desarrolló como una mejora respecto a otro criterio, debido a
Beltrami, que predice la falla basada en la energía total de deformación y que no es satisfactoria.
Expresando la energía interna de deformación (ver ecuación (123) del capítulo 1) para un
sólido linealmente elástico e isótropo en función de las tensiones principales y restando la energía
asociada al cambio de volumen ( la deducción está en el Anexo 2 al final del capítulo) se tiene:
32
Compendio de Cálculo Estructural II – FCEFyN – UNC
Wd
=
J.Massa-J.Giro-A.Giudici - 2015
1 +ν
2
2
2
(σ 1 − σ 2 ) + (σ 2 − σ 3 ) + (σ 3 − σ 1 )
6E
(5)
donde Wd es la energía (densidad ) de distorsión y σ 1 , σ 2 , σ 3 son tensiones principales.
Para el ensayo de tracción se tiene ( σ1 = σf ) y ( σ2 = σ3 = 0) y la energía de distorsión resulta
1 +ν
( 2 σ 2f )
6E
Por lo tanto el criterio de la energía de distorsión predice la falla si:
Wd =
(σ 1 − σ 2 )
2
+ (σ 2 − σ 3 ) + (σ 3 − σ 1 ) ≥ 2σ 2f
2
2
(6)
(7)
De todos los criterios referidos a materiales dúctiles, es éste el que mejor se aproxima a
los resultados experimentales. Más aún, a pesar de haberse deducido en el rango elástico
mantiene validez en el campo plástico.
Notar que si el criterio (7) de Von Mises predice que un estado ( σ1, σ2, σ3 ) está en la zona segura,
todo otro estado ( σ1+Δ, σ2+Δ, σ3+Δ), obtenido incrementando en el mismo valor Δ a las tres tensiones
principales, resultará seguro no importando cuán grande sea el valor de Δ ni cuál sea su signo! Hay
que destacar que el mismo fenómeno ocurre al aplicar la ecuación (4) del criterio de Tresca.
5 COMPARACIÓN DE LOS CRITERIOS DE FALLA
Adoptando un sistema de referencia tridimensional cartesiano se pueden graficar las tensiones
adimensionales σ i /σ f ( i = 1, 2, 3 ) y encontrar una superficie de falla tal que todos los estados de
tensión combinada que corresponden a los puntos de la superficie no producirán falla. Para el
criterio de Rankine resulta un cubo, para el criterio de Tresca un prisma hexagonal y para el
criterio de Von Mises un cilindro. El eje del cilindro pasa por los puntos donde σ1 = σ2 = σ3 y las
secciones para σ 3 /σ f = cte son elipses a 45 grados como la que se muestra en la Figura 1-c para el
caso σ3 = 0. El eje del prisma hexagonal de Tresca coincide con el eje del cilindro de Von Mises.
A modo de ejemplo el lector puede verificar que el criterio (7) no predice falla al ser aplicado al
siguiente estado: σ1 = 9 σf , σ2 = 8,5 σf , σ3 = 8,01 σf . Notar que el criterio (4) tampoco predice falla.
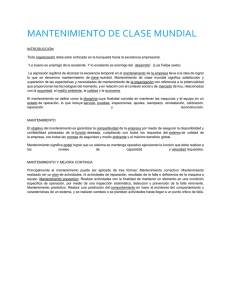
5.1 Caso de Tensión plana
Todo esto es más fácil de visualizar en el caso de tensión plana donde una de las tensiones
principales es nula, En esta subsección se denota con σ 1 y σ 2 a las tensiones principales no nulas:
a) Criterio de la máxima tensión normal:
Sin distinguir cual es la mayor entre σ 1 y σ 2 , la zona segura y las líneas de falla según (1)
corresponden a:
│σ 1/σ f │ ≤ 1 y │σ 2 /σ f │ ≤ 1
(8)
cuya representación gráfica es un cuadrado ( ver Figura 1 ).
b) Criterio de la máxima tensión de corte:
Hay que distinguir dos casos según el signo de σ 1 y σ 2 (ver Figura 1 ):
b-1) σ 1 y σ 2 de igual signo, entonces el máximo corte se obtiene relacionando la mayor entre
σ 1 y σ 2 con σ 3 = 0. Según (4) la zona segura y las líneas de falla resultan:
σ1 > σ 2
⇒ │σ 1/σ f − 0 │ ≤ 1
⇒
σ 1 /σ f =
± 1 rectas verticales.
σ 2 > σ1
⇒ │σ 2 /σ f − 0 │ ≤ 1
⇒
σ 2 /σ f =
± 1 rectas horizontales.
(9)
b-2) σ 1 y σ 2 de distinto signo, según (4) la zona segura y las líneas de falla resultan:
│σ 1/σ f − σ 2 /σ f │ ≤ 1
⇒
σ 1/σ f − σ 2 /σ f =
±1
y se obtienen dos rectas ascendentes a 45 ° con ordenada al origen igual a ±1 .
33
(10)
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
c) Criterio de la energía de distorsión:
Haciendo σ 3 = 0 en (7) y desarrollando se tiene:
2
2
σ1 σ 2
σ σ
(11)
1
σ + σ − σ 1σ 2 ≤ σ
⇒
+
− 1 2 =
σf σf
σ f σ f
esto define la zona segura contenida por la línea de falla que es una elipse con ejes a 45o como se
observa en la Figura 1-c.
2
1
2
2
2
f
Los resultados a), b) y c) para tensiones principales σ 1 y σ 2 ( siendo σ 3 = 0 ) pueden graficarse
como sigue:
Máxima tensión normal
Máxima tensión de corte
Energía de distorsión
Rankine
Tresca
Von Mises
Figura 1: Zona segura y líneas de falla en el caso de tensión plana según distintos criterios de falla
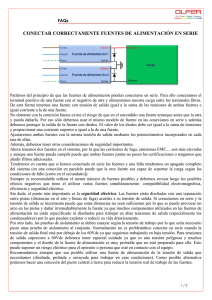
5.2 Resultados experimentales que avalan a los distintos criterios
A continuación en la Figura 2 se muestran los resultados de cuidadosos ensayos realizados por
varios investigadores con distintos materiales para estados planos. Los puntos están situados en el
1o y 4o cuadrante. Notar que por la simple vía de intercambiar la denominación σ 1 y σ 2 todos los
puntos experimentales pueden simetrizarse respecto a la diagonal del 1o cuadrante. Notar que no se
presentan ensayos en el 3o cuadrante porque el caso de ambas tensiones ( σ 1 y σ 2 ) de compresión
es un caso de poca importancia en ingeniería mecánica.
Materiales dúctiles
Materiales frágiles
Figura 2: Resultados de ensayos para estados planos realizados con distintos tipos de materiales
a) Falla de materiales dúctiles. b) Falla de materiales frágiles
34
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
6 CRITERIO DE FALLA DE MOHR
El criterio propuesto por Otto Mohr en 1900 es una extensión del criterio de la máxima tensión
de corte y se basa en una interpretación de los círculos de Mohr para estados tridimensionales. El
mayor éxito de este criterio es predecir la falla de materiales que tienen tensiones de falla distintas
según se trate de tracción o compresión.
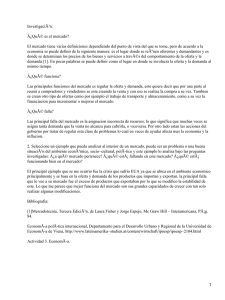
Antes de presentar el criterio de falla de Mohr conviene recordar la propiedad de los círculos
de Mohr. Se puede demostrar que si σ 1 > σ 2 > σ 3 son tensiones principales, y se grafican los tres
círculos de Mohr como se muestra en la Figura 3, sólo son posibles estados cuya tensión de corte es
tal que cae en la zona sombreada ( ver Anexo 3 al final de este capítulo ).
Figura 3: Construcción de tres círculos de Mohr a partir de las tensiones principales σ1 > σ2 > σ3
Para una línea vertical NC que corresponde a planos que tienen igual tensión normal ON la
tensión de corte resultará siempre τ ≤ NC . Por ello Mohr afirmó que el círculo mayor es
suficiente para determinar la condición de falla (sin importar el valor de σ 2 ).
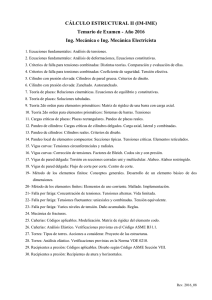
Considerando un material que presente diferente comportamiento según se trate de tracción o
compresión, se realiza un ensayo de tracción, uno de compresión y otro de corte puro por torsión.
Después se trazan tres círculos y una “curva envolvente” como se muestra en la Figura 4.
Figura 4: Curva envolvente de los círculos de Mohr para tracción, compresión y corte
Al hacerlo estamos definiendo una zona de falla fuera de la envolvente.
Se predice la falla en el estado tensional combinado cuando el mayor círculo de Mohr
asociado a un punto crítico desde el punto de vista tensional es tangente o excede los límites de la
envolvente de falla correspondiente a los tres ensayos; tracción, compresión y torsión, usando
probetas del mismo material.
Como la envolvente de falla no está definida en forma precisa, por simplicidad, se trazan sólo
los círculos de Mohr correspondientes a los ensayos de tracción y compresión y se utiliza una recta
tangente a los dos círculos.
35
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
Caso de tensión plana σ3 = 0
1) Material dúctil.
1-a) Caso σ t = σ c : el gráfico de la zona segura del criterio de Mohr coincide con el criterio
del corte máximo, notar la similitud entre la Figura 1-b y la Figura 5-a.
1-b) Caso σ c ≠ σ t : la zona segura corresponde a la Figura 5-b y sobre ella se determinarse el CS.
=
1er cuadrante Cs mayor
=
(σ 1 , σ 2 ) /σ t 3er cuadrante Cs mayor ( σ 1 , σ 2 ) / σ c
(12)
En el 4to cuadrante la zona segura y el coeficiente de seguridad, Cs están dados en (13).
Zona segura:
σ1 σ 2
+
<1
σt σc
σ
σ
Coeficiente de seguridad: Cs = 1 + 2
σ
σc
t
−1
(13)
La deducción de la ecuación (13) se puede consultar en el Anexo 4 al final del capítulo. La
fórmula para el 2do cuadrante se obtiene simetrizando (13) respecto a la bisectriz del 1er cuadrante.
2do cuadrante: σ 1 < 0 y σ 2 > 0
→
σ
σ
Cs = 1 + 2
σ
σ t
c
−1
(14)
Figura 5: Zona segura en el caso de tensión plana para distintos materiales
2) Material frágil. La Figura 5-c corresponde a una modificación empírica para el caso de
materiales frágiles con σ c ≠ σ t , que se conoce como Criterio de Mohr Modificado ( ver punto c
del Anexo 4 al final del capítulo).
Notar que si σ c → σ t el criterio de Mohr modificado coincide con el criterio de Rankine.
7 EVALUACIÓN DE LAS DISTINTOS CRITERIOS DE FALLA
Confrontando los distintos resultados experimentales producidos a lo largo del tiempo para
distintos materiales con las predicciones de los distintos criterios, (considerando aún otros no
presentadas aquí por ser menos exitosos ) se pueden extraer las siguientes conclusiones:
1) Para materiales isótropos que fallan por fractura frágil, el mejor criterio es el de la máxima
tensión normal (Rankine).
2) Para materiales frágiles cuya resistencia en compresión difiere significativamente de su
resistencia en tracción, el mejor criterio es el de Mohr modificado.
3) Para materiales isótropos dúctiles el mejor criterio es el de la máxima energía de distorsión,
siendo el criterio de corte máximo casi tan bueno como el anterior.
4) Para materiales dúctiles donde σ c ≠ σ t , el mejor criterio es el de Mohr.
Nota: Se pueden considerar como materiales dúctiles a aquellos cuyo alargamiento es
superior al 5 % ( medido sobre 2 pulgadas de longitud de probeta que contiene la zona de rotura ).
36
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
8 COEFICIENTE DE SEGURIDAD
Definimos al coeficiente de seguridad Cs como el valor por el cual hay que multiplicar a las
cargas para que la variable característica del criterio de falla adoptado alcance el valor de falla en el
punto más crítico de la pieza.
En la mayoría de los casos tratamos problemas lineales donde las tensiones son proporcionales a
las cargas. En tales casos el Cs se puede calcular dividiendo la tensión de falla por la tensión de trabajo.
En el caso de tensión plana se puede interpretar el Cs de una manera gráfica sencilla como se
indica en la Figura 6.
Figura 6: Interpretación gráfica del Cs en el caso de tensión plana para distintos criterios de falla
Una vez determinadas las tensiones principales σ 1 y σ 2 se ubica el punto P. El coeficiente
de seguridad es tal que Cs OP = OP′ , por lo tanto
Cs =
OP′
(15)
OP
8.1 Criterio de la máxima tensión normal
De (1) se tiene: Cs σ 1 = σ f . Hay que distinguir 3 casos:
⇒
σ t / σ1
Cs =
b) Tensiones principales negativas
σ1 > σ 2 > σ 3
σ1 > σ 2 > σ 3
⇒
Cs =
σc / σ3
c) Tensiones de distinto signo
σ1 > σ 2 > σ 3
⇒
a) Tensiones principales positivas
(16)
Cs =
menor (σ t /σ 1 ; σ c /σ 3 )
8.2 Criterio de la máxima tensión cortante
Según (4) en el punto más crítico de la pieza debe verificarse:
Cs τ máx =
σf
2
⇒
Cs =
σf
σ1 − σ 3
(17)
donde se ha tenido en cuenta que las tensiones principales son σ 1 > σ 2 > σ 3 .
Tensión plana
En el caso de tensión plana pueden calcularse dos tensiones principales mediante el círculo de
Mohr. Tener presente que la restante tensión principal es nula. No debe confundirse la tensión de
corte máxima τ max de la Figura 8 con el radio R del círculo de Mohr de la Figura 7.
σ x τ xy
σ =
σy
0
0
0
Figura 7: Círculo de Mohr en el caso de tensión plana
37
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
(
)
Una vez calculadas las tensiones principales σ x′ , σ ′y , 0 se pueden construir tres círculos de
Mohr. Esto se demuestra formalmente en el punto referido al círculo de Mohr, en el Anexo 3 al
final de éste capítulo.
Recordando la ecuación (48) del Capítulo 1 escribimos:
A
=
σx +σ y
σ x −σ y
2
+ τ xy
2
2
; R
=
2
σ x′ =
A+ R
σ y′ =
A− R
(18)
σ z′ =
σz =
0 ← No olvidar
(19)
Pueden darse cuatro situaciones según el signo de A y la relación de tamaños entre |A | y R.
Figura 8: Cuatro casos posibles para los círculos de Mohr
Resumiendo los resultados mostrados en la Figura 8 se tienen sólo dos resultados distintos.
Cs =
σf
donde
2τ max
A +R
τ max
2
R
cuando
A >R
cuando
A ≤R
(20)
8.3 Criterio de la energía de distorsión
Según (7) en el punto crítico se verifica que:
( Cs σ 1 − Cs σ 2 )
+ ( Cs σ 2 − Cs σ 3 ) + ( Cs σ 3 − Cs σ 1 ) =
2σ 2f
2
2
σf
Cs =
de donde:
2
(21)
(22)
1 (σ − σ ) 2 + (σ − σ ) 2 + ( σ − σ ) 2
3
2
2
3
1
2 1
El cálculo de las tensiones principales puede evitarse usando directamente las componentes
del tensor de tensiones.
Cs =
σf
(σ x + σ y + σ z ) − (σ x σ y + σ y σ z + σ z σ x ) + 3 (τ xy + τ yz + τ zx )
2
2
2
2
2
(23)
2
que es una expresión sumamente útil porque no requiere ningún cálculo previo.
Tensión plana
τ=
0 ) se tiene:
Particularizando (23) al caso de tensión plana ( σ=
z
zx τ=
zy
Cs =
σf
σ x + σ y − σ x σ y + 3τ xy
2
2
2
38
(24)
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
9 TENSIÓN EFECTIVA
Observando (17), (20), (22), (23) y (24) se concluye que para los criterios de Tresca y Von
Mises puede escribirse
σf
(25)
Cs = ∗
σ
donde σ ∗ es una tensión ficticia que se denomina tensión efectiva (o tensión de comparación). Esta
tensión ficticia resulta muy útil y puede además utilizarse de la siguiente manera:
σ ∗ ≤ σ adm
(26)
9.1 Caso tridimensional ( Tensor lleno)
Deben calcularse las tensiones principales σ 1 > σ 2 > σ 3
∗
σ=
σ1 − σ 3
Corte máximo : de (17):
=
σ∗
Energía de distorsión : de (22):
(27)
1 (σ − σ ) 2 + σ − σ 2 + σ − σ 2
( 2 3) ( 3 1)
2
2 1
(28)
Según (23), se pueden usar directamente las componentes del tensor de tensiones
∗
σ=
2
2
(σ x2 + σ y2 + σ z2 ) − (σ x σ y + σ y σ z + σ z σ x ) + 3(τ xy
+ τ yz
+ τ z2x )
(29)
9.2 Caso plano ( una fila nula en el tensor de tensión )
σ x τ xy
τ
σy
yx
0
0
0
0
0
(30)
Es un caso particular de gran importancia que se da en la mayoría de los casos prácticos.
Corte máximo: de (18) y (20):
A
=
σx +σ y
2
σx −σ y
2
+ τ xy
2
2
R
=
→
∗
σ=
Energía de distorsión: de (24):
A + R cuando
A >R
2 R
A ≤R
σ∗ =
cuando
2
σ x2 + σ y2 − σ xσ y + 3τ xy
(31)
(32)
que es una fórmula muy útil porque no requiere ningún cálculo previo.
9.3 Caso intermedio ( dos tensiones de corte nulas en el tensor de tensiones )
σ x τ xy 0
τ
σy 0
xy
0 σ z
0
(33)
Corte máximo:
Caso muy simple de resolver : se calculan las tensiones principales según (18).
=
A
σx +σ y
2
σ x −σ y
2
+ τ xy
2
2
=
R
→
σ x′ =
A+ R
σ ′y =
A− R
∗
σ=
mayor { A + R ; σ z } − menor { A − R ; σ z }
σ z′ =
σz
(34)
Energía de distorsión:
Particularizando (29) se tiene:
∗
σ=
(σ x + σ y + σ z ) − (σ x σ y + σ y σ z + σ z σ x ) + 3τ xy
2
2
2
2
39
(35)
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
10 COEFICIENTE DE SEGURIDAD EN CASOS NO LINEALES
En los casos lineales la gráfica carga vs. tensión
es una línea recta ( Figura 9 ) y el Cs puede
definirse en forma indistinta como:
Coeficiente de seguridad en tensiones
σ falla
σ∗
Coeficiente de seguridad en cargas
Carga
última
Cs =
Carga
Cs =
Carga
Carga
Carga última
Carga aplicada
(36)
(37)
Figura 9: Relación lineal entre cargas y tensiones
Cuando la relación entre la tensión y la carga no es lineal como en las Figuras 10 y 11 los
coeficientes (36) y (37) dan resultados diferentes, lo que induce a confusión.
10.1 Caso donde la tensión efectiva σ ∗ crece más rápido que la carga
En el caso de la Figura 10 se tiene:
( Cs )cargas < ( Cs )tensión
(38)
Notar que en este caso
Carga
última
( Cs )cargas
Carga
lineal
Carga
= 1,82
( Cs )tensión =
2, 24
y en la aproximación lineal es
(C )
= 2,69
s lineal
Carga
Figura 10: Caso donde la tensión crece más rápido que la carga
10.2 Caso en que la tensión efectiva σ ∗ crece más lento que la carga
En el caso de la Figura 11 se tiene:
( Cs )cargas > ( Cs )tensión
Carga
lineal
Carga
última
(39)
Notar que en este caso
( Cs )cargas
= 3,64
( Cs )tensión = 3,08
y en la aproximación lineal es
Carga
Carga
( Cs )lineal = 2,72
Figura 11: Caso donde la tensión crece más lentamente que la carga
Comentarios
1) En el caso de la Figura 10, el cálculo lineal aproximado da resultados inseguros. Eso debe evitarse.
2) En el caso de la Figura 11, el cálculo lineal da resultados del lado de la seguridad.
Conclusiones:
a) En los casos lineales usaremos indistintamente (36) o (37), ya que ( Cs )cargas = ( Cs ) tensión
b) En los casos no lineales se aconseja usar (37) o sea ( Cs )cargas .
40
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
ANEXOS DEL CAPÍTULO 2
Anexo 1:
Deformaciones volumétricas y distorsivas
El tensor lineal de deformaciones ε ij en el sistema de ejes principales resulta diagonal:
ε1
ε ij = 0
0
0
ε2
0
0
0
ε 3
(40)
Teniendo en cuenta el sentido físico del tensor de deformaciones resulta fácil calcular el cambio de
volumen de un cubo infinitesimal de lados dx1, dx2 y dx3 orientados según ejes principales:
∆ V = V f − Vi =
(1 + ε1 ) dx1 (1 + ε 2 ) dx2 (1 + ε 3 ) dx3 −
( dx1 dx2 dx3 )
(41)
Notar que la fibra que medía dx1 antes de la deformación, mide (dx1 + ε1dx1 ) después de la
deformación. Efectuando el producto y despreciando los términos cuadráticos en ε, frente a los
términos lineales, ya que ε << 1 resulta:
∆ V = (1 + ε1 + ε 2 + ε 3 ) dV − dV = ( ε1 + ε 2 + ε 3 ) dV
(42)
lo que demuestra que la traza del tensor de deformaciones ( que es un invariante frente a los cambios
de coordenadas) mide el cambio de volumen.
El tensor de deformaciones se puede descomponer de la siguiente forma:
ε1
0
0
0
ε2
0
0
0 =
ε 3
ε m
0
0
0 ε1 − ε m
0 + 0
ε m 0
0
εm
0
ε m=
donde
1
3
0
ε2 − εm
0
0
ε 3 − ε m
0
( ε1 + ε 2 + ε 3 )
En notación abreviada (43) se reescribe como:
(43)
(44)
=
ε εv + εd
(45)
Notar que el cambio de volumen asociado a ε d ( igual a la traza de ε d ) es nulo por la
definición de ε m . Por la misma razón el cambio de volumen asociado a ε v resulta igual al cambio
de volumen asociado a ε . Esto justifica la siguiente denominación:
ε v = tensor de deformaciones volumétricas.
ε d = tensor de deformaciones distorsivas (sin cambio de volumen).
En el caso de materiales isótropos las direcciones principales de tensión coinciden con las
direcciones principales de deformación lo que permite descomponer al tensor de tensiones de una
manera similar a (43) en un tensor de tensiones hidrostáticas y un tensor de tensiones distorsivas.
Anexo 2:
Energía de distorsión
La energía interna de deformación por unidad de volumen W, ver ecuación (123) del Capítulo 1,
puede expresarse en el sistema de ejes principales como:
W=
1
2
(σ 1 ε 1 + σ 2 ε 2 + σ 3 ε 3 )
(46)
donde se ha supuesto material lineal, isótropo. Recordar que σ 1 , σ 2 , σ 3 son tensiones principales y
que las tensiones de corte son nulas cuando el tensor de tensiones está referido a las tensiones
principales.
41
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
Las ecuaciones constitutivas (131) del Capítulo 1 particularizadas para el caso de tensiones
principales resultan
ε1=
1
σ 1 − ν (σ 2 + σ 3 )
E
1
σ 2 − ν (σ 1 + σ 3 )
E
ε 2=
ε 3=
1
σ 3 − ν (σ 1 + σ 2 )
E
(47)
Sustituyendo las (47) en la (46) resulta:
=
W
1
σ 12 + σ 22 + σ 32 − 2 ν (σ 1 σ 2 + σ 2 σ 3 + σ 3 σ 1 )
2E
(48)
que puede particularizarse para el caso de tensión hidrostática σ h :
=
Wh
1
3 (1 − 2ν ) σ h2
2E
si ahora hacemos:
(49)
σ1 + σ 2 + σ 3
σh =
(50)
3
y reemplazamos en (49) obtenemos la energía asociada al cambio de volumen como:
Wh
=
1 1 − 2ν
2E
3
(σ 1 + σ 2 + σ 3 )
2
(51)
Finalmente obtenemos la energía de distorsión Wd , restando la energía asociada al cambio de
volumen Wh dada por (51) de la energía total dada por (48)
W=
W − Wh
d
(52)
Reemplazando (51) y (48) en (52), desarrollando el cuadrado del trinomio y reagrupando
términos se llega a (53), que justifica a (5)
Wd
=
Anexo 3:
1 +ν
6E
(σ 1 − σ 2 ) 2 + ( σ 2 − σ 3 ) 2 + ( σ 3 − σ 1 ) 2
(53)
Círculos de Mohr
Empleando un sistema de direcciones principales, podemos expresar la tensión normal
asociada a un plano arbitrario definido por el versor v = (v1 , v2 , v3 ) aplicando (14) del Capítulo 1:
2
(54)
σ vv = σ 1 v1 + σ 2 v22 + σ 3 v32
Para ese mismo plano arbitrario podemos escribir el cuadrado del módulo de la tensión, σ v
empleando (15) del Capítulo 1:
σ=
σ vv2 + σ vs2
v
2
pero, según (11) del Capítulo 1, para el sistema de ejes principales:
σ v = σ 1 v1 t 1 + σ 2 v2 t 2 + σ 3 v3 t 3
2
2
2
sustituyendo (57) en (55) se tiene:
σ vv2 + σ vs2= σ 12 v12 + σ 22 v22 + σ 32 v32
42
(56)
σ v = (σ 1 v1 ) + (σ 2 v2 ) + (σ 3 v3 )
(55)
2
(57)
(58)
Compendio de Cálculo Estructural II – FCEFyN – UNC
Además por ser v un versor
J.Massa-J.Giro-A.Giudici - 2015
v12 + v22 + v32 =
1
(59)
Dadas un par de tensiones σ vv y σ vs arbitrarias puede encontrarse la dirección v para la cual
ocurren dichas tensiones resolviendo el sistema formado por las ecuaciones (54), (58) y (59) donde
las incógnitas son v12 , v22 , v32 . Hallando la solución en forma genérica se tiene:
=
v12
σ vs2 + (σ vv − σ 2 ) (σ vv − σ 3 )
≥ 0
(σ 1 − σ 2 ) ( σ 1 − σ 3 )
⇒
σ vs2 + (σ vv − σ 2 ) (σ vv − σ 3 ) ≥ 0
=
v2
σ vs2 + (σ vv − σ 3 ) (σ vv − σ 1 )
≥ 0
( σ 2 − σ 3 ) (σ 2 − σ 1 )
⇒
σ vs2 + (σ vv − σ 3 ) (σ vv − σ 1 ) ≤ 0
=
v32
σ vs2 + (σ vv − σ 1 ) (σ vv − σ 2 )
≥ 0
(σ 3 − σ1 )(σ 3 − σ 2 )
⇒
σ vs2 + (σ vv − σ 1 ) (σ vv − σ 2 ) ≥ 0
2
(60)
Notando que vi2 es siempre positivo y además σ 1 > σ 2 > σ 3 . Estas desigualdades pueden
escribirse como:
2
σ −σ3
≥ 2
2
σ + σ3
σ vs + σ vv − 1
2
2
σ1 − σ 3
2
2
σ +σ2
σ vs + σ vv − 1
2
2
σ −σ2
≥ 1
2
2
σ vs2 + σ vv −
σ2 + σ3
2
≤
2
2
2
(61)
donde el primer miembro es el cuadrado de la distancia al centro del círculo y el segundo miembro
es el cuadrado del radio del círculo.
Para que un par de componentes σ vv , σ vs representen el estado de tensión para un cierto plano
definido por v , deberán cumplir con (61) y por lo tanto encontrarse en la zona sombreada del
gráfico de los círculos de Mohr de la Figura 12.
Figura 12: Zona de los posibles estados tensionales en un punto
43
Compendio de Cálculo Estructural II – FCEFyN – UNC
Anexo 4:
J.Massa-J.Giro-A.Giudici - 2015
Coeficiente de seguridad en el criterio de Mohr
a) Material dúctil donde │σc│= σt
En este caso el criterio de Mohr coincide con el criterio de corte máximo y se utiliza (17).
Cs =
σf
(62)
σ1 − σ 3
Tensión plana
Es muy frecuente que una de las tensiones principales sea nula. En estos casos de tensión
plana, al emplear (17) considerando solamente σ1 y σ2 es común cometer el error de olvidarse, que
una de las tensiones principales es nula. Pueden darse tres casos que se indican en la Figura 13
donde se utilizan tensiones principales:
Figura 13: Tres casos posibles de tensión plana
Es obvio que si se utiliza un sólo círculo de Mohr basado en las tensiones no nulas σ1 y σ2 se
cometerá un error en los casos 1 y 3 de la Figura 13.
b) Material dúctil donde │σc│≠ σt
Según se propone en la Figura 14 deben trazarse los círculos de Mohr para los ensayos de
tracción y compresión. A partir de las direcciones principales σ(1) > σ(2) > σ(3) debe trazarse el mayor
círculo de Mohr usando σ(1) y σ(3). Luego partiendo del centro del círculo se traza una
perpendicular a la envolvente de falla determinando los puntos P y P′ ( Figura 14 ). :
Cs =
AP′
(63)
AP
donde: AP =
(σ (1) − σ (3) ) / 2
AP′ = R2 − ( R2 − R1 )
A=
(σ (1) + σ (3) ) / 2
R2 + A
R2 + R1
=
R1 σ=
R2 σ c / 2
t /2
siendo σ1 > σ2 > σ3 tensiones principales
Figura 14: Coeficiente de seguridad para material dúctil donde σt ≠│σc│
Hay que notar que (63) se reduce a (62) cuando σ c = σ t .
Tensión plana
Cuando una tensión principal es nula, se calculan las otras tensiones principales σ I > σ II y se
calcula el coeficiente de seguridad Cs considerando tres zonas. Recordar que σ c es negativa.
ambas positivas
σ I > 0 y σ II > 0
→
44
σ
σI
t
Cs =
(64)
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
distinto signo
σ I > 0 y σ II < 0
→
σ
σ
Cs = I + II
σt σc
ambas negativas
σ I < 0 y σ II < 0
→
c
Cs =
−1
σ
σ II
(65)
(66)
donde hay que tener presente que σ c es negativa y que σ I > σ II .
El coeficiente de seguridad dado en (65) se deduce a continuación utilizando la Figura 15 que
corresponde al 4º cuadrante de la Figura 5-b.
Figura 15: Deducción del coeficiente de seguridad del criterio de Mohr en el 4º cuadrante
Por semejanza de triángulos:
=
Cs
OP′
=
OP
P′R
=
σ2
OR
σ1
P′R = σ 2 Cs
OR = σ 1 Cs
(67)
y también por semejanza de triángulos:
P′R
σc
=
σ t − OR
σt
(68)
Reemplazando (67) en (68) y despejando se obtiene (65) que coincide con (13).
El coeficiente en el 2o cuadrante se obtiene simetrizando respecto a la diagonal del 1o cuadrante.
c) Material frágil donde │σc│≠ σt
En el caso de un material frágil donde la resistencia en compresión │σc│es mayor que la resistencia
a tracción σt se utiliza el criterio de Mohr modificado. Se utiliza la Figura 5-c y se consideran sólo
las tensiones σ(1) y σ(3) y se ignora el valor de σ(2). Por tratarse de un material frágil sólo interesan
las tensiones máximas.
σ (1) > 0 y σ (3) ≤ σ (1)
→
σ (1) > 0 y σ (3) > σ (1)
→
σ (1) ≤ 0 y σ (3) < 0
donde:
=
Φ1
σt
=
y Φ3
σ (1)
σ (3)
→
σ
σ (1)
t
Cs =
=
Cs menor { Φ1 , Φ 3 }
σc
+ σ (1) ( σ c / σ t − 1)
45
σ
σ (3)
c
Cs =
(69)
(70)
(71)
(72)
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
Tensión plana:
Cuando una tensión principal es nula, se calculan las otras dos tensiones principales σI > σII y
se calcula el coeficiente de seguridad observando la Figura 5-c que corresponde al criterio de
Mohr modificado, también relacionado con el criterio de Rankine.
Para determinar el coeficiente de seguridad hay que distinguir tres zonas.
σ I > 0 y σ II < σ I
→
Cs =
σt / σI
(73)
σ I > 0 y σ II > σ I
→
=
C
s σ c / σ II + σ I (1 + σ c /σ t )
(74)
σ I < 0 y σ II < 0
→
σ c / σ II
Cs =
(75)
donde hay que tener presente que σ c es negativa y que σI > σII .
Anexo 5:
Tensión de comparación σ ∗ ( Resumen )
Resumen de los valores de la tensión de comparación σ ∗ que depende del material y de las
tensiones.
σ ∗ en el caso general
Material
D
Ú σc = σt
C
T
I
L
σc > σt
(
) (
) (
1 σ −σ 2 + σ −σ 2 + σ −σ
(2)
(3)
(3)
(1)
2 (1) (2)
)
α=
σt
σc
1
Corte
máximo
2
Mohr
3
R+ A
Máxima
tensión
normal
4
← A>0
R + A
R + A (1 − 2α ) ← − R < A < 0
← A ≤ −R
R + A α
Mohr
modificado
5
R + A
2 R
[ σ (1) − σ (3) ] (1 + α )
{
σ (1) ; σ (3)
←
←
A >R
A ≤R
← A> R
R+ A
( R + A) + α ( R − A) ← A < R
← A ≤ −R
α R + A
2 − (1 − α ) [σ (1) + σ (3) ] / σ t
(
}
σ (1)
← σ (1) > 0 σ (3) ≤ σ (1)
mayor {σ (1) ; Φ} ← σ (1) > 0 σ (3) > σ (1)
α σ
← σ (1) ≤ 0 σ (3) < 0
(3)
Φ α σ (3) + (1 − α ) σ (1)
donde=
σ ij ← tensor lleno
tensiones principales
σ (1) > σ (2) > σ (3)
(
)
)
σ x , σ x , τ xy
σ=z τ=
xz τ=
yz 0
σx +σy
2
σx −σy
2 + (τ xy )
A ==
R
2
σt = tensión de falla en tracción.
σc = tensión de falla en compresión.
46
Criterio
o
de falla N
Energía de
distorsión
σ x2 + σ x2 − σ xσ y + 3τ xy2
2
σ (1) − σ (3)
el mayor de
(76)
σ ∗ en tensión plana
Deducida de la ecuación (63)
F σc = σt
R
Á
G
I σc > σt
L
σt
σ∗
Cs =
En todos los casos →
2
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
PRÁCTICO
Criterios de Falla
Nota: Todos las longitudes se dan en unidades [cm] y las fuerzas en [ kg].
1 En una sección rectangular de 3 cm x 2 cm de
una estructura tridimensional se han calculado
los esfuerzos indicados en el croquis.
Se pide calcular el coeficiente de seguridad a
fluencia en los siguientes casos:
a) Material acero 1020: σf = 2800 kg/cm2.
b) Material fundición maleable:
σt = 2500 kg/cm2
σc = −3200 kg/cm2.
2 En una sección de un tubo se han calculado los
esfuerzos indicados en el croquis adjunto.
Diámetro exterior 8 cm y espesor 0,4 cm.
Calcular el coeficiente de seguridad para los dos
materiales del problema 1.
3 Dimensionar el eje horizontal de acero del
croquis calculando el diámetro externo con
un coeficiente de seguridad a fluencia dato:
PH = 300 kg
σf = 2600 kg/cm2
PV = 600 kg
CS ≥ 1,8
a) eje macizo.
b) eje hueco de espesor 0,5 cm.
4
Una cañería que lleva agua a presión p = 8 kg/cm2
está apoyada cada 600 cm.
Se pide:
a) Hallar el coeficiente de seguridad a fluencia
sabiendo que el material es acero:
σf = 3400 kg/cm2
peso = 0,00785 kg/cm3
b) Determinar el valor de la presión que produce
falla por fluencia.
Nota: Debido a la continuidad de los tramos podemos suponer tramos biempotrados.
5
6
Calcular la tensión de efectiva en el caso de un eje circular macizo sometido a flexión y torsión.
Comparar los resultados de los distintos criterios ( Rankine, Tresca y Von Mises ).
Para los 4 materiales dados, calcular el CS para cada uno de los 3 estados tensionales que se listan
a continuación. Usar la Tabla resumen del anexo 5 de la página 46 y comparar con otras
fórmulas para el CS. En todos los casos las unidades son [cm] y [kg].
Materiales
1
Dúctil
2
3
Frágil
4
σt
2500
2500
2500
2500
σc
–2500
–3570
–2500
–5000
Tensiones
1
σx
σy
τxy
σx = τxz = τyz
1000
200
300
0
2
300
–500
300
0
3
–200
–1000
300
0
47
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
SOLUCIÓN del PRÁCTICO
1
Criterios de Falla
Se pide calcular el coeficiente de seguridad de la sección. Fuerzas en [kg] y longitudes en [cm].
N → σN =
− 600 / 6 =
− 100
Las tensiones de corte de Jourasky tienen variación
parabólica y τmáx en el centro de los lados:
Q2 → τ 2 =
1,5 x Q2=
/ A 1,5 x 320=
/ 6 80
máx
/ 6 60
Q3 → τ=
1,5 x 240
=
3 máx
Tensiones por flexión
bh 2 3 x 22
2 x 32
=
W3 = = 2
=
W2 = 3
6
6
6
M 3 →=
σ 3 M 3 /=
W3 1600=
/ 2 800
/ 3 500
M 2 →=
σ 3 M 2 /=
W2 1500=
Para las tensiones por torsión se usan las fórmulas
del caso 6 del Anexo del Capítulo 10, pág. 193:
x = a /b = 2 /3 ⇒ Cτ = 1 / 3 − 0, 225 x + 0,1 x 2 = 0, 2278
=
τ 3 τ=
máx
T
=
Cτ b a 2
1333
= 400
0, 2278 x 3 x 22
= 356
τ=
(0,74 + x3 − 0,74 x 4 ) τ=
0,89 x 400
2
3
Para encontrar el punto crítico se calculan las tensiones en 8 puntos ( puntos A hasta H )
Material y criterio
Tensiones
σA
σC
σE
σG
ACERO ecuación (24)
Criterio de Von Mises
=
−100 + 800 − 500 =
200
=
CSC 2800
=
/1400 2
=
−100 − 800 − 500 =
−1400
=
−100 − 800 + 500 =
− 400
=
−100 + 800 + 500 =
1200
CSC =
−3200 / (−1400) =
2, 29
=
CSG 2500
=
/1200 2,08
−100 − 500 =
−600
σ B =
τ B = 80 + 356 =436
−100 − 800 =
− 900
σ D =
=
CS D
60 400 =
− 340
τ D =−
2800
= 2,6
2
900 + 3 x 3402
400
−100 + 500 =
σ F =
80 356 =
−276
τ F =−
700
−100 + 800 =
σ H =
=
CS H
τ H = 60 + 400 =460
Coeficiente de seguridad
Punto crítico
FUNDICIÓN MALEABLE
Criterio de Mohr
σD =
− 450 ± 4502 + 3402
σ D 1 = 114 σ D 2 = −1014
−1
114 −1014
CS D =
+
2,76
=
2500 −3200
350 ± 3502 + 4602
σH =
σ H 1 = 928 σ H 2 = − 228
2800
= 2,64
−1
928
−228
7002 + 3 x 4602
CS H =
2, 26
+
=
2500 − 3200
CS = 2
CS = 2,08
punto C
punto G
48
Compendio de Cálculo Estructural II – FCEFyN – UNC
2
J.Massa-J.Giro-A.Giudici - 2015
Se pide calcular el coeficiente de seguridad de la sección. Unidades [kg] y [cm]
A =π ( D 2 − d 2 ) / 4 =π (82 − 7, 22 ) / 4 =9,55
=
W
π (D4 − d 4 )
=
64 D / 2
π (84 − 7, 24 )
= 17, 29
64 x 4
Para la torsión se usa 2W
M=
99002 + 141602 = 17278
σ = 999,3 − 20,9 =
Punto A
τ = 319,8
σN =
− 200 / 9,55 =
− 20,9
=
σ M 17278
=
/ 17, 29
999,3
=
τ T 11060
=
/ (2 x 17, 29)
978, 4
− 999,3 − 20,9 =
− 1020, 2
σ =
Punto B
τ = 319,8
319,8
a) Acero: Criterio de la energía de deformación. Punto crítico: Punto B ..........
Ec. (24) → Cs
=
A
2800
=
=
CsB
2, 49
2
2
978, 4 + 3 x 319,8
CsB = 2, 41
2800
=
1020, 22 + 3 x 319,82
2, 41
b) Fundición maleable: Criterio del corte máximo. Punto crítico: Punto A ....... CsA = 2,18
Punto A: A =
σ /2 =
489, 2
R=
489, 22 + 319,82 =
584,5 σ I =
1073,7
Punto B: A =
σ /2 =
− 510,1 R =
510,1 2 + 319,8 2 =
602,1
3
σ II =
− 1112, 2
-1
92,0
− 1112, 2
CsB =
2,60
+
=
−3200
2500
1073,7 −95,3
CsA =
+
= 2,18
2500 −3200
-1
Ec. (65) →
σI =
92,0
σI =
− 95,3
Se pide dimensionar el eje solicitado a flexión y torsión (calcular el diámetro). Unidades [kg] y [cm]
Esfuerzos en el punto crítico ( punto B)
Momento flector máximo:...... M=
Momento torsor:......................
=
T
Hay que satisfacer el requisito
1,8 ≤
Ec. (24) →
2
108002 + 1800=
10949
600
=
x 15
300
=
x 30
9000
CS ≥ 1,8 :
2600
9000
10949
+3
W
2W
2
49
2
→
Wreq ≥ 9,30 cm3
Compendio de Cálculo Estructural II – FCEFyN – UNC
a)
Sección llena
=
W
b)
J.Massa-J.Giro-A.Giudici - 2015
π D3
= Wreq ≥ 9,30 ........................................................................
32
D ≥ 4,56 cm
Sección hueca de espesor 0,5 cm
b-1) Cálculo aproximado como sección de pared delgada usando para el módulo resistente la
fórmula del Anexo del Capítulo 8 (pág. 148) o del caso 2 del Anexo del Capítulo 10 (pág. 193):
Waprox = t π rm2 = Wreq ≥ 9,30 →
rm ≥ 2, 433 →
D ≥ 2 rm + t ............ D ≥ 5,37 cm
No se obtiene una buena aproximación porque el espesor no es muy pequeño, para ese diámetro,
se puede verificar que el coeficiente de seguridad es 1,65 y no 1,8.
b-2) Cálculo exacto:
=
Wexacto
π D 4 − ( D − 2 x 0,5)4
por tanteos
= Wreq ≥ 9,30
→ D ≥ 5,577 ....... D ≥ 5,58 cm
64 x D / 2
Se puede verificar que la sección hueca reduce el peso del eje a la mitad.
4
Se pide calcular el coeficiente de seguridad y la presión máxima que puede soportar una cañería.
Unidades en [kg] y [cm]
Tubo → Área = π (302 − 292 ) / 4 = 46,34
Agua =
→ Área π=
292 / 4
Peso = 46,34 x 0,0078 = 0,3614
=
Peso
660,5
Carga q = 0,3614 + 0,6605 = 1,022
660,5=
x 0,001
Módulo W =
0,6605
π (30 − 294 )
4
64 x 15
= 336,15
Tensión longitudinal debida a la flexión del tubo
M=
q 2
1,022 x 6002
M
30660
=
=30660 → σ =
=
=91, 2
12
12
W
336,15
Tensión circunferencial causada por la presión interior
2σ c e =
σc
=
pd → σ c =
8 x 30
=
2 x 0,5
pd
e
240
El punto crítico está en la parte inferior de los apoyos donde la tensión longitudinal ( σ = − 91, 2 )
tiene distinto signo que la tensión circunferencial ( σ c = +240 ).
a) Cálculo del coeficiente de seguridad CS :
Ec. (24) →
CS =
3400
(−91, 2) + 240 − (−91, 2) x 240
2
.............................................
CS = 11,5
2
b) Cálculo de presión pm que produce la falla ( CS = 1 ) :
1=
3400
(−91, 2) + (30 pm ) − (−91, 2)(30 pm )
2
2
→ pm2 + 3,04 pm − 12835 =
0 → pm = 111,8 kg /cm 2
Notar que pm ≠ CS p (111,8 ≠ 11,5 x 8 =
92 ) ya que se incrementó la presión mientras el
peso propio ( tubo más agua) permaneció sin cambio.
50
Compendio de Cálculo Estructural II – FCEFyN – UNC
5
J.Massa-J.Giro-A.Giudici - 2015
Se pide calcular la tensión efectiva usando distintos criterios y comparar los resultados
A=
Ec. (18)→
σ
2
σ
2
+τ =
2
2
Ec. (18)→
R=
Por lo tanto R > A ⇒
=
I
π d4
=
JR
64
A2 + τ 2 > A
A <R
π d4
32
32
M
W
Tensión normal por flexión...... σ =
2
1 M T
+ =
2 W 2W
1
2W
M 2 +T2
a. Criterio de la máxima tensión normal:
*
σ=
σ (1)=
T
2W
Tensión cortante por torsión.... τ =
2
σ
+τ 2
=
2
2
=
R
π d3
W=
*
A + R ...................................................... σ=
1
2W
(M +
1
W
M 2 +T2
1
W
M 2 + 0,75 T 2
M 2 +T2
b. Criterio de la máxima tensión de corte:
A < R → σ* =
2 R .............................................
=
σ*
Ec. (31) →
c. Criterio de la energía de distorsión:
2
T
M
=
σ*
...............
+3
2
W
W
2
Ec.(32) →
σ =
*
σ + 3τ =
2
2
Valores de σ* según el criterio utilizado y el tipo de solicitación
Solicitación
T=0
Flexión pura
M=0
Torsión pura
Rankine ( máxima tensión normal )
M/W
0,500 M/W
Tresca-Guest ( máxima tensión de corte )
M/W
1,000 M/W
Von Mises (energía de distorsión)
M/W
0,866 M/W
Criterio
Comentarios:
1) En el caso de flexión pura los tres criterios son concordantes.
2) En el caso de torsión pura los tres criterios dan resultados diferentes.
Aceptando que los ejes se fabrican con materiales dúctiles para los cuales se adecúa mejor el
criterio de la energía de distorsión, podemos concluir que el criterio del corte máximo dará
resultados conservativos mientras que el criterio de la máxima tensión normal dará resultados
inadecuados y lo que es peor, inseguros.
51
)
Compendio de Cálculo Estructural II – FCEFyN – UNC
6
J.Massa-J.Giro-A.Giudici - 2015
Para hacer comparaciones se pide calcular de varias maneras el coeficiente de seguridad, para
tres estados tensionales y para 4 materiales distintos. Dimensiones en [kg] y [cm].
Primero se calculan los valores de A y R que definen el círculo de Mohr y con ellos se calculan las
dos tensiones principales no nulas. Los resultados se resumen en la siguiente tabla donde figuran
las tensiones no nulas dato ( σx, σy, τxy ), los valores característicos para trazar el círculo de Mohr (A y R),
las tres tensiones principales (σ(1), σ(2), σ(3)) y las dos tensiones principales no nulas para ser usadas
en las ecuaciones (64), (65), (66), (73), (74) y (75) que se dan en las dos últimas columnas.
Estado
tensional
1
2
3
Datos
σx
1000
300
–200
τ xy
σy
200
–500
–1000
300
300
300
Círculo de
Mohr
A
R
600
500
–100
500
–600
500
Otras tensiones
(64)-(66), (73)-(75)
σ (3)
σI
σ II
0
1100
100
–600
400
– 600
–1100
–100
–1100
Tensiones principales
σ (1)
1100
400
0
σ (2)
100
0
–100
Para cada uno de los 15 casos considerados ( 3 estados tensionales y 5 criterios de falla) se calculó
el CS de tres maneras distintas.
En la columna (4) se consideraron las fórmulas para la tensión efectiva en el caso general de un
tensor lleno dadas en el Anexo 5 y con esa tensión efectiva se calculó el CS indicado en la columna (5).
De manera similar pero considerando el caso particular de tensión plana se obtuvieron los resultados
reportados en las columnas (6) y (7). Existe total concordancia entre los resultados de las columnas
(5) y (7) excepto en el caso del material 2. Para ese material las diferencias en promedio son
menores al 10 % y se deben a que en el caso de tensor lleno se adopta el criterio de la Figura 14
que no concuerda con lo propuesto en la Figura 5-b para el caso de tensión plana.
En la columna (9) se muestra el CS calculado con: i ) las ecuaciones (16), (17) y (24) dadas en el
punto 8 del Capítulo 2 para materiales con igual resistencia en tracción y compresión y ii ) las
fórmulas dadas en el Anexo 4 del Capítulo 2 para materiales donde │σc│≠ σt. Notar que hay total
concordancia entre los resultados mostrados en las columnas (7) y (9). Eso se debe a que las
fórmulas utilizadas tienen un origen común. En un caso se calcula directamente el CS y en otro a
partir de la tensión efectiva.
Fórmulas del Anexo 5 del Capítulo 2
Caso general
Tensión plana
σ*
σ*
CS
CS
Otras fórmulas para
el coef. de seguridad
CS
Ecuación
Material
Criterio
de falla
Estado
tensional
(1)
(2)
(3)
(4)
(5)
(6)
(7)
(8)
(9)
1
2
3
1
2
3
1
2
3
1
2
3
1
2
3
1054
872
1054
1100
1000
1100
1001
840
877
1100
600
1100
1100
500
550
2,37
2,87
2,37
2,27
2,50
2,27
2,50
2,98
2,85
2,27
4,17
2,27
2,27
5,00
4,54
1054
872
1054
1100
1000
1100
1100
820
770
1100
600
1100
1100
500
550
2,37
2,87
2,37
2,27
2,50
2,27
2,27
3,05
3,25
2,27
4,17
2,27
2,27
5,00
4,54
(24)
(24)
(24)
(17)
(17)
(17)
(64)
(65)
(66)
(16)
(16)
(16)
(73)
(74)
(75)
2,37
2,87
2,37
2,27
2,50
2,27
2,27
3,05
3,25
2,27
4,17
2,27
2,27
5,00
4,54
1
Von Mises
1
2
Tresca
2
3
Mohr
3
4
Rankine
4
5
Mohr
modificado
52