Tomografía de azimut amplio
Anuncio

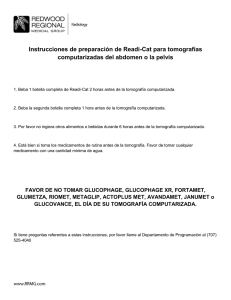
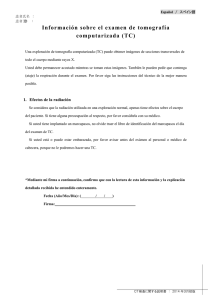
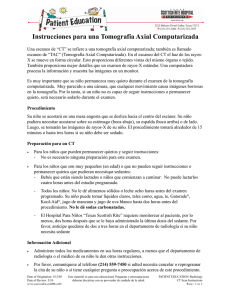
Tomografía de azimut amplio La tomografía de azimut amplio (WAZ) es una extensión natural de la tomografía de azimut angosto (NAZ). El objetivo Imagen de baja calidad de las fallas del proceso es derivar actualizaciones del campo de velocidad tales que, cuando los datos son re-migrados, éstas proporcionan eventos planos en los gathers. El proceso es altamente automatizado e interactivo. La mayor diferencia entre la tomografía WAZ y la tomografía NAZ es que la ecuación utilizada para derivar las actualizaciones del campo de velocidad es generalmente mucho mejor constreñidas, lo cual permite una mejor determinación de la velocidad. La tomografía WAZ de GXT está capacitada para la determinación de parámetros de modelos isotrópicos y anisotrópicos. Específicamente para modelos anisotrópicos, nuestra tomografía WAZ admite tanto el modelo anisotrópico VTI como el TTI. Para estos modelos, la tomografía se utiliza para determinar no sólo los cambios de velocidad, sino también actualizaciones de los parámetros épsilon y delta. Para poder hacer actualizaciones del campo delta, la Análisis convencional de la velocidad Imagen mejorada de la fallas tomografía necesita acceso a la información de pozos o saber alguna relación entre los dos parámetros, por ejemplo que delta es aproximadamente la mitad de épsilon. Los datos de entrada para el programa de tomografía WAZ son gathers migrados. Se pueden utilizar varios tipos de gathers migrados. La elección del tipo de gather a utilizar depende de la complejidad del modelo de velocidad en profundidad que se esté determinando. Para cuencas sedimentarias y en áreas por arriba o alrededor de la sal los datos de entrada estándar son los gathers generados por Kirchhoff o por la migración beam. En áreas donde el trazado de rayos admite múltiples rutas, los gathers de ángulo generados con ”Reverse Time Migration” (RTM) o la ecuación de la onda (WEM) son la mejor opción. Análisis de velocidad de alta densidad Para los datos WAZ, los gathers de Kirchhoff se determinan por offset y azimut o por vectores de cubos de offset. El número de azimuts y de vectores de cubos de offset dependerá de la geometría de la adquisición. Si los gathers son generados en relación a offset o azimut, el moveout residual (RMO) se determina para cada azimut y se introduce en el programa de actualizaciones de la tomografía, con un cubo separado de RMO para cada azimut. Si se seleccionan los vectores de cubos de offset, los dos cubos del RMO que mejor representen una superficie 3D del RMO para cada reflector migrado son introducidos en la tomografía. Los gathers de ángulo que se utilizan para la tomografía para datos WAZ son gathers 3D determinados por el ángulo de reflexión y el ángulo del azimut. La generación de gathers de ángulo con estos dos parámetros permite al programa de tomografía seleccionar la trayectoria de rayos 3D necesaria para actualizar el modelo de velocidad aun cuando el campo de velocidad es complejo. Las actualizaciones para la velocidad y los parámetros de anisotropía se determinan utilizando la trayectoria de rayos 3D y restricciones controladas por el usuario. Tales restricciones pueden ser simples, como por ejemplo controlar la magnitud de cambio en los parámetros del modelo como ocurre con restricciones de suavidad, o restricciones basadas en pozos que penalizan las actualizaciones del modelo que se alejan de la información provista por el pozo o por el usuario. La Tomografía WAZ de GXT está completamente comercializada, y todos los métodos y flujos de trabajo necesarios están incorporados en la serie estándar de herramientas geofísicas de GXT. Modelo de impedancia de velocidades de alta resolución Detalles de Contacto: ION GX Technology 2105 CityWest Blvd., Suite 900 Houston, TX 77042 U.S.A. Teléfono +1 713 789 7250 Fax +1 713 789 7201 iongeo.com