Alineamiento temporal no lineal
Anuncio

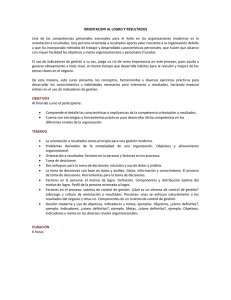
Alineamiento temporal no lineal Algorı́tmica (Facultad de Informática) Curso 2006–2007 Podemos definir una métrica entre secuencias de valores que encuentra aplicación en problemas de reconocimiento de formas. Consideremos un problema de reconocimiento en lı́nea de escritura manuscrita. El usuario escribe en pantalla letras o dı́gitos de un juego de caracteres preestablecido. El sistema debe comparar cada trazo del usuario con los que tiene almacenados (de fábrica) y decidir a cuál se parece más.1 La figura 1 ilustra el problema. Figura 1: En la lı́nea superior, trazos almacenados en la base de datos “de fábrica” para comparar con los trazos del usuario. En la lı́nea inferior, un trazo introducido por el usuario y que el sistema debe clasificar comparándolo con los de la lı́nea superior. Cada trazo es una secuencia de puntos en el plano y de longitud arbitraria. La figura 2 muestra un trazo y la secuencia de puntos con que se representa. 67 8 9 1011 1213 14 5 15 16 4 17 18 3 2 19 20 21 1 0 22 23 24 25 26 27 28 29 31 30 32 34 38 42 40 36 33 44 43 35 46 47 45 48 41 3937 49 50 51 52 53 54 55 56 57 58 59 60 61 97 96 95 94 93 92 91 62 63 90 89 88 87 64 65 66 67 68 69 70 86 85 71 83 84 82 8180 73 72 76 75 74 79 7877 Figura 2: Cada trazo es una secuencia de puntos en el plano. 1 Las agendas electrónicas de diseño relativamente reciente suelen integrar software que permite efectuar reconocimiento de escritura manuscrita como el descrito. 1 Pongamos que comparamos dos trazos diferentes del dı́gito 3. Podemos comparar los dos trazos midiendo la distancia euclı́dea entre pares de puntos ((equivalentes)) en ambas sucesiones de puntos. El problema surge a la hora de definir ((equivalentes)): las dos secuencias pueden tener diferente número de puntos y, aun en el caso de que tuvieran idéntica cantidad, un alineamiento punto a punto no pondrı́a en correspondencia partes similares de cada trazo. Interesarı́a idear algún método que supiera alinear las partes similares de dos trazos. Si dispusiésemos de un método para calcular alineamientos serı́a sencillo definir una medida de disimilitud entre trazos: la suma de distancias entre puntos alineados. La figura 2 ilustra por qué cabe esperar que esta técnica ofrezca buenos resultados: a mano izquierda se muestra un alineamiento óptimo en cierto sentido entre dos instancias de un 3 y, a mano derecha, un alineamiento óptimo entre una instancia de un 3 y otra de un 4. El alineamiento se visualiza gráficamente con lı́neas que unen los puntos emparejados. La suma de distancias entre pares de puntos alineados es claramente menor al alinear dos instancias de un mismo dı́gito que al hacer lo mismo con instancias de dı́gitos distintos. Figura 3: A la izquierda, alineamiento óptimo entre dos trazos que representan a un 3. A la derecha, alineamiento óptimo entre el trazo de un 4 y el de un 3. Los puntos alineados en cada caso se muestran unidos por una lı́nea recta. La longitud de dicha lı́nea es, naturalemente, la distancia euclı́dea entre los puntos. Es evidente que la suma de longitudes entre puntos alineados (ası́ como la longitud media) es menor al comparar dos instancias de un mismo dı́gito que al comparar instancias de dı́gitos diferentes. Si seguimos esta aproximación hemos de definir qué es un alineamiento óptimo. Pues bien, la definición guarda relación con el propio concepto de disimilitud: el alineamiento óptimo es aquel que hace mı́nima la suma de distancias entre puntos alineados. Planteemos formalmente el problema. Dadas dos secuencias a = (a1 , a2 , . . . , am ) y b = (b1 , b2 , . . . , bn ) ∈ (R×R)+ , definimos un alineamiento entre a y b como una secuencia de pares ((i1 , j1 ), (i2 , j2 ), . . . , (ip , jp )) tal que: (i1 , j1 ) = (1, 1); (ip , jp ) = (n, m); (ik−1 , jk−1 ) 6= (ik , jk ), para 1 < k ≤ p; ik−1 ≤ ik y jk−1 ≤ jk , para 1 < k ≤ p. Si no desemos que el alineamiento deje ((huecos)) (pares de puntos sin alinear), hemos de añadir una restricción adicional 0 ≤ ik − ik−1 ≤ 1 y 0 ≤ jk − jk−1 ≤ 1, para 1 < k ≤ p. 2 Sea2 X(a, b) el conjunto de alineamientos entre a y b. Definimos la distancia de alineamiento temporal no lineal (DTW, por el inglés ((Dynamic Time Warping))) entre a y b como X DTW(a, b) = mı́n d(aik , bjk ), ((i1 ,j1 ),(i2 ,j2 ),...,(ip ,jp ))∈X(a,b) 1≤k≤p donde d(aik , bjk ) es la distancia entre dos puntos (y que nosotros asumiremos que es la distancia euclı́dea). Mostramos la ecuación recursiva con DTW(i, j) para hacer referencia a DTW(a1:i , b1:j ): d(a1 , b1 ), DTW(1, j − 1) + d(a1 , bj ), DTW(i − 1, 1) + d(a , b ), i 1 DTW(i, j) = DTW(i − 1, j) + d(ai , bj ), mı́n DTW(i, j − 1) + d(ai , bj ), DTW(i − 1, j − 1) + d(ai , bj ) si i = 1 y j = 1; si i = 1 y j > 1; si i > 1 y j = 1; , si i > 1 y j > 1. 2 Hay definiciones alternativas de alineamiento. En aras de la brevedad y simplicidad de exposición, no entraremos a considerarlas. 3