4.3 Curvas en una superficie S
Anuncio

4.3 - Curvas sobre una superficie
Curso 2010-11
4.3 Curvas en una superficie S
Panorama:
1. Cálculo práctico de las curvaturas de una curva C S
1.
2.
Cálculos geométricos
Cálculos analíticos cuando el parámetro de C no es su arco
2. Líneas principales de curvatura de una superficie regular
1.
2.
3.
4.
Definición.
Existencia
Cálculo
Consecuencias
3. Direcciones y líneas asintóticas
1.
2.
Direcciones asintóticas: definición, existencia y cálculo
Líneas asintóticas: definición, existencia, cálculo en ptos. Paraból. e hiperbólicos
4. Líneas geodésicas
1.
2.
Definición, existencia y cálculo
Discusión del carácter geodésico de una curva dada
5. Cuadro-resumen de curvas especiales de una superficie
6. Ejemplos y ejercicios
1
4.3 Curvas en S.- a) Cálculo práctico de las curvaturas
a1.- Cálculo geométrico de n y g de una curva CS {, (u,v)}
•Ya visto que: Dada CS respecto su parámetro arco: r = r(s) u = u(s),
por la cadena s
u s
d r du
tˆ ( s ) :
g
ds
ds
ˆ ( s ) :
d tˆ
ds
d2 u
d s2
r
v s ,
g
d u d g
ds ds
se puede derivar en la base de S:
: ˆ g
ˆ ˆ n ˆ g
: ˆ n
2
d u2 ddus ddus g ddus 3 ddus N
ds
tˆ
N
pl. tang.
ˆ g
̂
nˆS
n̂
ˆ n
•Curvª. normal: ̂ n := ̂ ·N = ddus 3 ddus = IIFF(tˆ ,tˆ ) y se observa:
̂n es común a todas las CS que pasen por P en la misma dirección, tˆ
geométricamente es la proyección del vector curvatura ppal. de C, ̂ , al vec. N de S.
• curvª. geodésica :
ˆ g := ˆ ( N tˆ ) = dd su ddus ddu:s g ( N tˆ )
2
2
geométricamente es la proyección de ̂ al plano tangente a S en el punto.
Ejemplos: Determinar gráficamente la curvatura normal y geodésica de: i) hélice de paso p =
2c en una sup. cilíndrica de radio R; ii) paralelo genérico en una sup. cónica de radio R y
altura h.
2
1
4.3 - Curvas sobre una superficie
Curso 2010-11
a2.- Cálculo práctico analítico de la curvatura normal n
•Si C ≡ {u = u(s), v = v(s)} (parámetro arco):
n ˆ ·N tˆ·K· tˆ
n
du
ds
dv
ds
f dd us
· d v II ª FF ( dd us , dd vs )
g ds
e
·
f
•Si C ≡ {u = u(t), v = v(t)} (parámetro arbitrario): tˆ
n
du
dt
K
· K11
12
ddut
dv
d t ·G · d v
dt
du
dt
K12 ddut
·
K 22 ddvt
dv
dt
du
dt
dv
dt
ddut
·G· d v
dt
dr
dt
ds
dt
II ª FF ( ddut , ddvt )
I ª FF ( ddut , ddvt )
•Ejemplos: Paralelo y meridiano de superf. esférica (cálc. analítico de n)
•Ejercicio: Resolver analíticamente los ejemplos de la dispositiva anterior (hélice y
paralelo del cono)
3
a3.- Cálculo práctico de curvatura geodésica
Analíticamente:
•Si C ≡ {u = u(s), v = v(s)}:
ˆ g ˆ ·( N tˆ )
d2 r
d s2
· N dd rs N , dd rs , dd s2r
2
•Si C ≡ {u = u(t), v = v(t)} se aplica que
2
2
ˆ 2
y así se tiene: d t d 2r d 2s tˆ d s
ds
dt
dt
d2 r d d s
d t2 d t d t
2
2
d s
d s d tˆ
tˆ 2 tˆ
dt
dt d s
dt
N , dd rt , d 2r
dt
ˆ
d
t
ˆ g N , tˆ , d s
luego
en cada (u(t),v(t))
dr 3
2
dt
(esta fórmula suele utilizarse en cartesianas, más q. en las bases nat. de la param. S)
Ejemplos
•cálculos por construcción geométrica: esfera, cono, cilindro.., PR3.23
•cálculos analíticos: PR3.22, 3.24, 3.25.
4
2
4.3 - Curvas sobre una superficie
Curso 2010-11
b) Líneas (principales) de curvatura
•b1.- Definición
•Curvas C S tal que en cada punto llevan una dirección principal de curv. de S, es
decir: t(P) = d (P).
•b2.- Existencia
•Por cada punto pasan dos líneas de curvatura mutuamente ortogonales: por los
teoremas de existencia y unicidad de solución de las e.d.o. de 1er. orden con valor
inicial (punto P por donde pasa la curva y direcc. ppal. d(P) de K).
•b3.- Cálculo
•1) Cálculo directo por ecuación diferencial vectorial con los autovectores de K:
exigir a r = r(s) que t = d (exige calcular los autovectores normalizados, d , de K)
•2) Cálculo por e.d.o. deducida de la condición de curvatura normal extrema (máxima
o mínima): apuntes Ecuación (4.3-14) (este mét. no exige calc. los autovect. de K).
•b4.- Consecuencia geométrica
•Toda superficie regular admite parametrizaciones cuyas líneas coordenadas Lû , L v̂ ,
son líneas principales de curvatura de S. Se llaman parametrizaciones principales.
Sólo en ellas, las dos formas fundamentales resultan diagonales (F = f = 0 = cte.)
•Ejemplos
•líneas de curvatura del helicoide recto (PR3.26).
5
•líneas de curvatura del paraboloide hiperbólico.
6
3
4.3 - Curvas sobre una superficie
Curso 2010-11
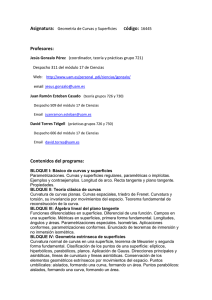
helicoide recto
(R = 2, p = 2)
líneas de curvatura
7
c) Direcciones y líneas asintóticas
•c1.- Direcciones asintóticas
•direcciones tangenciales e / n(e) = 0
•c2.- Existencia y cálculo de las direcciones (tangenciales) asintóticas
•no existen dir. asintóticas en puntos elípticos de S
•existe una dirección asintótica en cada punto parabólico, que es la dirección ppal. de
curvatura normal "0", que debe tener el punto (porque detK = k1k2 = 0)
•existen dos direcciones asintóticas en cada punto hiperbólico, que por el th. de Euler
(e = cosd1 + send2 n(e) = k1cos2 + k2sen2) son simétricas respecto de una
dirección principal, formando un ángulo con d1 tal que tg2 = – k1/k2 > 0.
•c3.- Líneas asintóticas
•definición: curvas CS / n(P) = 0, PÎC.
•Interpretación geométrica: el pl. osculador de C es el pl. tangente a S , "PÎC.
•existencia: existen en los puntos parabólicos e hiperbólicos de S, (teorema de
existencia de soluciones de e.d.o. de 2do. orden con valores iniciales)
•cálculo en ptos. parabólicos: coincide con línea principal de curvatura normal nula
•cálculo en ptos. hiperbólicos: e.d.o. t·K·t = 0 dr·K·dr = 0
•Ejemplos
•1) De nuevo el helicoide recto ; •2) Sup. de rev. x = u cosv, y = u senv , z = f(u) 8
•3) La superficie tórica de revolución.- •4) Catenoide..
4
4.3 - Curvas sobre una superficie
Curso 2010-11
9
10
5
4.3 - Curvas sobre una superficie
Curso 2010-11
d) Líneas geodésicas
•d1.- Definición: curvas CS / g(P) = 0, P N , dd rsˆ , dd sr2ˆ N , tˆ , ˆ 0, s
•d2.- Interpretación geométrica (¡¡):
•el plano osculador de C es ortogonal a S en cada P N (P) nˆ (P)
•la curva no dobla sobre la superficie (toda su curvatura es normal: κ̂ κ n , κ g 0
•d3.- Existencia:
•por cada P de una S regular pasa una línea geodésica de S en cada dirección
tangencial, e = t(P).
•La e.d.o. es de 2do. orden y los valores iniciales deben ser P y t(P)
•d4.- Cálculo:
d 2 u d u d u
0 y sólo en algunos casos sencillos
•la e.d.o. de las geodésicas es
d s2
ds
ds
se pueden resolver elementalmente. Ej.: cilindro recto circular, cono, sup. de rev.
•en cambio, se pueden utilizar métodos aproximados (Análisis 2º y Amp. Mat. de 3º)
•uso de la interpretación geométrica para discutir si una curva dada es o no una línea
geodésica:
N | | nˆ N nˆ osc (C ) S P C N , tˆ , ˆ 0, s
•Analíticamente, se puede comprobar que C verifica las e.d.o. de las geodésicas (que
exigen conocer los símbolos de Christoffel en la distribución matricial simétrica)
•Ejemplos:
2
•1) En S ≡ {z = x2 – y2}, ¿la curva C = S {y = 0} es geodésica? (figura)
•2) ¿Puede ser geodésica una línea asintótica de una superficie regular S? Describir un ejemplo
11
o razonar si no puede existir. • 3) PR3.28, PR3.29
Ejemplos y ejercicios
•PR3.18: La catenoide (superficie con lín. asintóticas ortogonales)
•parametrización cilíndrica = a Ch(v/a), = u, z = v} cartesiana
{x = aCh(v/a)cosu, y = aCh(v/a)senu, z = v}
• 1 = a2 Ch2(v/a)gugu + Ch2(v/a)gvgv ; dS = a Ch2(v/a) dudv
• K = agugu + (1/a)gvgv;
[K] =
1
2 v
a
Ch
( )
a
0
1
2 v
a Ch ( )
a
0
1 = ... , 2 = ... ; KG = ... ; KM = 0 ; ptos. hip.
otras cuestiones sobre la catenoide:
•líneas de curvatura: son los meridianos y paralelos = líneas
coordenadas de esta parametrización (las dos FF salen diagonales en la base
natural parametrización principal).
•líneas asintóticas: dr·K·dr = 0 ... {u=u0+t, v=v0±at, t}
• otros ejemplos: PR3.26 (helicoide recto), PR3.29
12
6
4.3 - Curvas sobre una superficie
Curso 2010-11
Cuadro-resumen: Tipos especiales de curvas sobre una sup.
Si C : {u = u(s)} S : {r = r(u,v); (u,v)} , P(s) = (u(s), v(s))
Def.
lin. de curvatura
"s: tˆ ( s ) = d(s),
lin. asintóticas
lín. geodésicas
"s: n(s) = 0
"s: g(s) = 0
siendo d = dir. ppal. osc(C)= tan(S) en
curv. en cada P(s).
cada P de C.
exis
ten
cia
dos líneas de curvª.
ortogonales por cada
punto regular de S,
una en cada dir. ppal.
•dirs. asintóticas: e
tangls. / e · K · e = 0
• lín. as. en P parab.
o hiperb. en las dir.
asintóticas
•P parab.: e / K · e = 0
osc(C)= nor( tˆ ) en
cada P de C.
•Por cada punto
regular de S pasa
una lin. geodésica en
cada dir. tangencial
e (dada como cond.
inicial)
•P hiperb.: e / e K·e
k1cos2 + k2sen2 = 0
tg2 = – k1/k2 =
arctg[(– k1/k2)1/2]
lin. de curvatura
e.
d.
o.
lin. asintóticas
13
lín. geodésicas
incógnitas: u u (s)/
u = u(s) / tˆ ( s ) e asint u = u(s) /
tˆ(s) ddus gu ddvs gv K) tˆ(s)·K(s)·tˆ(s)
d2 u d u d u
0
2
du
s
s
s
d
d
d
e
f
ds
ddus ddvs ·
· d v 0
( ddvs )2 ddus ddvs ( ddus )2
f
g
ds
du
g11
g12
g22 0 1 lin. as. de P's parab. o 2 d u d u d v d s 0
lin. as. de P's hiperb. en las d s d s d s d v
K11
K12
K22
2 direcciones asintóticas.
d s
2
2
in Stmas. coord. principales:
•sus lin. coord. Lu y Lv son
t
lín. de curv. de S, (ortog.)
er •tanto IFF como IIFF son
pr diag. en cada P en coord.
ppales. (caracterización)
.
•sistemas idóneos (en
g
teoría) para medir o para
representar o incluso para
e
construir S.
o
Ejemplo: el helicoide
m
•"PC, el pl. osc. de C en
P es el pl. tangte. a S en P.
•C dobla tangencialmente
a S en cada PC
•. ˆ ˆ g ; ˆ n 0
Ejemplo: paralelos de
máxima y mínima cota de
una sup. tórica.
•"PC el pl. osc. de
C es normal a S (y el
pl. rectif. de C es
tangente a S)
• ˆ ˆ n ; ˆ g 0
Ejemplo: sup. tórica.: los
paralelos de máxima y
mínima distancia al eje
de revol. y todos los 14
meridianos son geodés.
7