Trabajo práctico 3
Anuncio

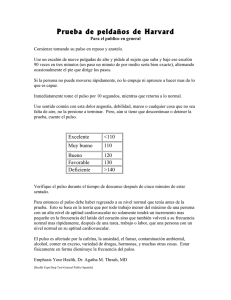
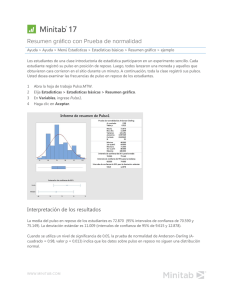
TEORÍA DE LAS COMUNICACIONES - AÑO 2016 PRÁCTICA N◦ 3 Primera parte: COMPORTAMIENTO ESPECTRAL DE COMUNICACIONES DIGITALES Ejercicio 1: Bosquejar espectros de potencia de transmisiones PAM a 1 Mbps (1 Megabit por segundo) en los siguientes casos: NRZ binario bipolar diferencial. Manchester cuaternario. AMI con duración del pulso igual al tiempo de bit (NRZ bipolar). AMI con duración de pulso igual a la mitad del tiempo de bit (RZ bipolar). Binario bipolar con conformación espectral coseno elevado con factor α = 0,5 distribuida por igual entre transmisor y receptor. 16–ario bipolar con conformación espectral coseno elevado con factor α = 1 distribuida por igual entre transmisor y receptor. En todos los casos, considerar bits independientes y equiprobables. Para el primer caso, observar que si los bits de la fuente son independientes y equiprobables, los bits resultantes de la codificación diferencial también lo son. Ejercicio 2: a) Un sistema debe transmitir a una velocidad de 9600 bps utilizando un canal pasabajos de banda estrictamente limitada a 2250 Hz. Se adopta un sistema PAM con conformación espectral del tipo coseno elevado repartido por igual entre transmisor y receptor. ¿Cuál es el mı́nimo de niveles que debe tener la transmisión y cuál puede ser el factor de roll-off asociado? b) Comparar los sistemas BPSK, QPSK y 16QAM en base a los siguientes factores: el ancho de banda ocupado para una dada velocidad de transmisión y un determinado tipo de conformación espectral. la energı́a de bit (media) necesaria para alcanzar una dada probabilidad de error de bit. Para ello, completar el siguiente cuadro, en el que el sistema BPSK es tomado como referencia. Ancho de banda relativo Eb /N0 relativa necesaria BPSK 1 0dB QPSK 16QAM Ejercicio 3: Un sistema pasabanda cuaternario transmite con envolvente rectangular. La constelación tiene los sı́mbolos ubicados en (3a, 2a), (3a, −2a), (−2a, 3a) y (−2a, −3a). Calcule y grafique la densidad espectral de potencia de la transmisión (utilizando pulsos de amplitud compleja). Observe que obtiene deltas que podrı́a utilizar para recuperar la portadora, ¿qué fracción de la potencia total se utiliza en transmitir esta sinusoide piloto? ¿Cúal es la degradación aproximada de este sistema respecto al QPSK? 1 Ejercicio 4: Generaremos en MATLAB diagramas de ojos y diagramas de dispersión para un sistema de comunicaciones digital con forma de pulso correspondiente a espectro del tipo coseno elevado. a) Grafique la forma del pulso a la salida del filtro adaptado y el diagrama de ojos para distintos valores del factor de roll-off α (0.1, 0.3, 0.5, 0.75 y 1). Puede utilizar las siguientes sentencias como guı́a. % factor de roll-off alpha = 0.499; % vector de tiempo normalizado respecto del tiempo de sı́mbolo tn = -10:0.01:10; % forma de pulso total a la salida del filtro del receptor p = sinc(tn).*cos(pi*tn*alpha)./(1 - 4*(alpha^2).*(tn.^2)); % bits aleatorios b = sign(rand(1,100)-0.5); % salida del filtro adaptado y = conv(p,kron(b,[1 zeros(1,99)])); figure;plot(0.01*(1:length(y)),y);grid title(’Salida del filtro adaptado’); xlabel(’t/T_s’);ylabel(’Amplitud’); % diagrama de ojo figure;hold on; for k = 11:54 plot(linspace(-1,1,200),y(((k-1)*100+1):((k+1)*100))); end hold off;grid title(’Diagrama de ojos’); ¿Existe interferencia inter-sı́mbolo? Observar como a medida que se reduce el ancho de banda (α disminuye) se producen los siguientes efectos: el pulso se “dispersa” en el tiempo; los cruces por cero del diagrama de ojos se dispersan y el ojo se cierra en el sentido horizontal. b) Grafique el diagrama de ojos para distintos niveles 2, 4, 8 y 16 con α = 0,5. Observar el acercamiento de los niveles y el cierre horizontal del ojo a medida que aumenta su número. c) Grafique el pulso coseno elevado pasado por un canal pasabajos de un polo y el diagrama de ojos correspondiente para distintas frecuencias de corte (f3dB = 1/T , f3dB = 1/2T y f3dB = 1/4T ). En este caso, ¿Existe interferencia inter-sı́mbolo?. Observar el retardo del pulso debido al atraso de fase del canal, que crece al disminuir la frecuencia de corte. En todos los casos, el instante óptimo de toma de muestra es cuando el “ojo” tiene la máxima apertura. La asimetrı́a del pulso y del diagrama de ojos se deben a la caracterı́stica de fase no lineal de la transferencia total, este efecto se hace más notorio al reducirse la frecuencia de corte. d) Grafique el diagrama de dispersión (scatter plot) para la situación planteada en el inciso c) para el modelo de canal con f3dB = 1/2T . Tenga en cuenta que debe hacerlo para instante en que el ojo tiene la apertura máxima. e) Considere un sistema QPSK representado a partir de su modelo equivalente complejo en banda base. Asuma que por cada canal en cuadratura se transmite un pulso con conformación espectral raı́z de coseno elevado, que el modelo de canal es un filtro pasabajos de un polo con f3dB = 1/2T y que el filtro adaptado del receptor esta adaptado al pulso transmitido. Grafique el diagrama de dispersión para dicha comunicación. ¿Existe interferencia inter-sı́mbolo? 2 1.2 1 f = 0.886 0 0.8 0.6 0.4 0.2 f −1 f = 0.094 = 0.050 1 0 f = −0.007 2 −0.2 −5 0 5 Figura 1: Salida del filtro adaptado. Ejercicio 5: Considere una comunicación binaria se transmite un pulso con conformación espectral raı́z de coseno elevado, un modelo de canal es un filtro pasabajos de un polo con f3dB = 1/2T más ruido blanco aditivo Gaussiano con DEP N0 /2 y que el filtro del receptor está adaptado al pulso transmitido. El pulso de salida del filtro adaptado es el que se muestra en la figura 1. Con el objetivo de reducir la distorsión producida por el canal se propone diseñar un ecualizador. a) Convénzase de que la secuencia de ruido obtenida como resultado del muestreo a la salida del filtro adaptado es corresponde a ruido blanco y gaussiano. b) En estas condiciones podemos modelar el canal a través de su modelo equivalente discreto sin necesidad de descorrelacionar el ruido. Considere que basta con tomar cuatros taps para modelar el canal. Los valores de los coeficientes fi se toman directamente sobre la salida del filtro adaptado al pulso y son los valores que se indican en el grafico. Calcule la distorsión pico y compare el valor obtenido con el diagrama de ojo resultante en el Ej. 4 inciso c). c) A partir de este modelo diseñe un ecualizador de dos taps a partir del método zero-forcing. Evalúe la distorsión pico resultante a la salida del ecualizador. d) Repita el ejercicio anterior considerando el criterio de minimización del error cuadrático medio para los valores de Eb /N0 4,5 dB, 9,6 dB y 15 dB. e) Calcule la mejora (en dB) que se consiguió en el caso c) y d) con respecto al caso b) adoptando el criterio de la distorsión pico. 3 TEORÍA DE LAS COMUNICACIONES - AÑO 2016 PRÁCTICA N◦ 3 Segunda parte: SINCRONISMO DE PORTADORA Y DE SÍMBOLO Ejercicio 1: Lazo de Costas Digital En este ejercicio justificaremos la estructura de sincronización de fase de portadora para señales BPSK conocida como Lazo de Costas, en su versión Non-Decision Directed y digital. Supondremos que la estimación de la amplitud y el retardo de sı́mbolo de la señal recibida ya están resueltos por lo que se puede modelar la señal observada durante un tiempo de sı́mbolo (0 ≤ t ≤ T ) como r(t) = A cos (2πfc t + θ) + n(t), en donde θ es el parámetro a estimar, A = ±1, y n(t) es ruido blanco gaussiano con DEP N0 /2. Consideraremos además que el tiempo de observación (en el cual se puede asumir que θ es constante) es igual a K sı́mbolos. a) Halle una base que permita representar a la señal de interés durante todo el intervalo de observación. Indique la dimensión de esta base y justifique por qué las coordenadas de la señal recibida en esta base constituyen un estadı́stico suficiente para el problema de estimación planteado. b) Obtenga la distribución de las coordenadas de la señal r(t) en 0 ≤ t ≤ KT . Halle la función de verosimilitud necesaria para estimar θ condicionada al valor de amplitudes de los sı́mbolos recibidos. c) Para poder obtener un estimador Non-Decision Directed es necesario “borrar” la dependencia con las amplitudes de los sı́mbolos. Obtenga entonces la nueva función de verosimilitud suponiendo que los sı́mbolos son independientes y equiprobables. Es conveniente expresar el resultado en términos de la función cosh(·). d) Calcule la función logarı́tmica de verosimilitud, despreciando constantes irrelevantes. Por último, utilice la siguiente aproximación para baja relación señal a ruido: ln (cosh (x)) ≈ x2 /2 si |x| ≪ 1. e) Obtenga una expresión que defina al estimador de Máxima Verosimilitud de la fase θ. Intente interpretar el resultado como una versión digital del producto de una rama en fase y otra en cuadratura luego filtrado por un pasa bajos (Discriminador de Costas). f ) Basado en la interpretación anterior proponga un esquema de estimación a lazo cerrado (similar a un PLL digital) que permita ir actualizando la estimación de θ en sucesivos tiempos de observación de largo KT . Indique qué bloque se deberı́a modificar en este esquema para lograr que la respuesta de lazo cerrado posea error de estado estacionario nulo frente a un error de frecuencia (rampa de fase). Ejercicio 2: La Fig. 2 muestra una posible forma de realizar un sincronizador de bit del tipo early-late para sistema NRZ binario antipodal. Las llaves Le1 y Le2 son de la ramar early, y Ll1 y Ll1 son las correspondientes a la rama late. El VCO opera a una frecuencia que es múltiplo de la que se desea obtener, y el bloque que le sigue es un circuito lógico secuencial que por división de frecuencia permite obtener, además de la señal de reloj, las señales necesarias para manejar las llaves analógicas y el circuito de muestreo y retención. a) Mostrar en un diagrama de tiempos cómo deben ser las señales generadas por dicho bloque, teniendo en cuenta que en esta implementación los intervalos de integración son de medio tiempo de sı́mbolo. b) Mostrar que el comportamiento de este circuito es equivalente al de un PLL con un detector AT [V olts/radian], donde A es la amplitud de la señal, T es la de fase de ganancia Kd = 2πτ duración de bit y τ = RC. 4 Figura 2: Sincronizador de bit analógico. Ejercicio 3: A partir de las instrucciones presentadas a continuación, analizaremos el comportamiento del discriminador de retardo no coherente estudiado en clase: theta = pi/2; % error de fase alpha = 0.499; % factor de roll-off EbN0dB = 9.6; % Eb/N0 en dB EbN0 = 10^(EbN0dB/10); % Eb/N0 en veces Ts = 1; % tiempo de simbolo K = 100; %numero de simbolos generados Ns = 100; %numero de muestras por tiempo de simbolo tm = Ts/Ns; %tiempo de muestreo N = K*Ns; % nro de muestras % forma de pulso total a la entrada del filtro del receptor t = -10*Ts:tm:10*Ts; tn = t/Ts; h = 1.*(abs(tn)<1/2); % pulso NRZ % h = raizcoselevado(tn,alpha); % pulso raiz de coseno elevado % bits de datos bi = sign(rand(1,K)-0.5); bq = sign(rand(1,K)-0.5); % entrada del filtro adaptado si = conv(kron(bi,[1 zeros(1,Ns-1)]),h,’same’)/sqrt(2); sq = conv(kron(bq,[1 zeros(1,Ns-1)]),h,’same’)/sqrt(2); s = (si*cos(theta) - sq*sin(theta)) + 1i*(si*sin(theta)+ sq*cos(theta)); rbg = sqrt(1/EbN0)*(randn(1,N) + 1i*randn(1,N)); % muestras de ruido gaussiano r = s + rbg; % se~ nal recibida r_filt = conv(r,h/sqrt(Ts),’same’)*tm; % salida del filtro adaptado tau = -0.5*Ts:tm:0.5*Ts; dN = round(tau/tm); n = (3*Ns+1):Ns:((K-3)*Ns); delta = round(Ns/2); for ii = 1:length(tau) zp = r_filt(n+dN(ii)); % muestra prompt ze = r_filt(n-delta+dN(ii)); % muestra early zl = r_filt(n+delta+dN(ii)); % muestra late en(ii) = mean(real(conj(zp).*(ze - zl))); % discriminador del error end Grafique la señal recibida a la entrada del filtro adaptado y la curva caracterı́stica del discriminador. Vea cómo se modifica esta última cuando cambia el desplazamiento delta de las muestras 5 early y late y corrobore que el error de fase no afecta su comportamiento. Además puede probar con distintas formas de pulso usando la función raizcoselevado.m disponible en la página de la cátedra y para distintos valores de Eb /N0 . Ejercicio 4: El objetivo de este ejercicio es observar cómo los errores de sincronismo de portadora afectan el desempeño de los sistemas de comunicaciones de datos con modulación digital. a) En un sistema QPSK, el receptor recupera la portadora con error de fase fijo θ. Calcule la probabilidad de error de bit en función de Eb , N0 , y θ. Halle una cota inferior y una superior. b) ¿Cuál es el máximo valor tolerable del error θ si la degradación debida a ese efecto no debe ser superior a 1dB? c) Asumiendo que el error en la fase de la portadora recuperada no es fijo sino que tiene fluctuaciones en el tiempo (carrier jitter ), pudiendo ser modelizado como un proceso aleatorio θ(t) estacionario con densidad de probabilidad de primer orden fθ (θ) conocida. En estas condiciones, encuentre una expresión que permita evaluar (por métodos numéricos) la probabilidad de error para QPSK. d) Repita el inciso b) para estos sistemas: BPSK, 16-QAM. Ejercicio 5: El objetivo de este ejercicio es analizar cómo los errores de sincronismo de sı́mbolo afectan el desempeño de los sistemas de comunicaciones de datos. Para lo que sigue, usaremos el error de tiempo normalizado, λ = τ /T (que es adimensional), donde τ es el error de sincronismo (diferencia de tiempo entre el instante de toma de muestra y el instante óptimo). Notar que −1/2 ≤ λ ≤ 1/2. a) Trace el diagrama de ojos para una transmisión NRZ binaria antipodal. Obtenga una expresión exacta de la probabilidad de error en función del error de sincronismo λ. Encuentre una cota inferior y una superior (como en ocasiones anteriores, lo que nos interesa es la cota superior, que corresponde a evaluar el sistema con el criterio de la distorsión pico). b) ¿Cuál es el máximo valor tolerable del error si la degradación debida a ese efecto no debe ser superior a 1dB? c) Asumiendo que el error en la fase del reloj recuperado no es fijo sino que tiene fluctuaciones en el tiempo (timing jitter ), pudiendo ser modelizado como un proceso aleatorio λ(t) estacionario con densidad de probabilidad de primer orden fλ (λ) conocida. Además, las fluctuaciones son suficientemente lentas como para considerar que en la duración de un sı́mbolo λ(t) no cambia. Tales fluctuaciones son debidas principalmente al ruido, y en segundo lugar al hecho de que el comportamiento del sincronizador de bits depende del esquema de bits recibido. En estas condiciones, encuentre una expresión que permita evaluar (por métodos numéricos) la probabilidad de error para NRZ. d) ¿Cómo serı́a la respuesta del inciso 5a) para un sistema cuaternario?, ¿y para un sistema QPSK? (explique cómo procederı́a en este último caso). e) Considere ahora un sistema que transmite utilizando conformación espectral raı́z de coseno elevado sobre un canal que no produce distorsión y el receptor consiste en el filtro adaptado al pulso transmitido. A partir de los diagramas de ojo realizados en el Ejercicio 4 de la primera parte de esta práctica: i) ¿Cuánta degradación en el desempeño (medida en dB) produce un error de sincronismo de bit del 10 % del tiempo de sı́mbolo en los casos binarios para los distintos factores de “roll–off”? ii) ¿Cuánto es el error de sincronismo de sı́mbolo (en unidades de T de sı́mbolo) que produce una degradación de 3 dB en los casos de 2, 4, 8 y 16 niveles para α = 0,5? 6