Document
Anuncio

Accionamientos
Teoría General
Control de Máquinas Herramienta
Lección 1
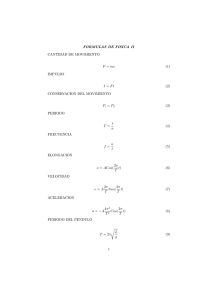
Modelización Mecánica
vf
FV
FRESA
PIEZA
FH
GUIAS
MESA
CORONA
MOTOR
PIÑON
HUSILLO
ACOPLAMIENTO
(
)
1
1
1
J M θ&M2 + J Aθ&M2 + J Pθ&M2 + J Cθ&h2 + J hθ&h2 + M m x&2 = M e x&2 = J eθ&M2
2
2
2
2π
2π r
θ&h =
x&
θ&M = rθ&h =
x&
p
p
T=
Modelización Mecánica
2
2
2 1
2π
2π r
1
+ M m x& = M e x&2
+ ( J C + J h )
( J M + J A + J P )
2
2
p
p
2
2
2π r
2π
+ M m
+ ( J C + J h )
M e = ( J M + J A + J P )
p
p
Je = J M + J A + J P + ( JC + Jh )
1
p
+
M
m
2
r
2π r
TM θ M = FeM x →
FeM x = TM
TeCθ M = FC x →
TeCθ M = FC
2π r
x →
p
p
θM
2π r
2
FeM = TM
→
2π r
p
TeC = FC
p
2π r
Selección de Parámetros Mecánicos
n
Criterio de potencia:
TM Ω
n
1
( FL + 2M m a )VC max
η Aη Rη h
Criterio de velocidad:
Ω
n
M
≥
M max
p
≥ VC max
2πr
→
p
VC max
≥
2 π r Ω M max
Equilibrio dinámico:
J A &&
J A && 2π
T
J
J
= M C &x&+ FL
−
(
+
)
θ
η
−
+
θ M η h
M
M
A
h
M
p
2
2
Selección de Parámetros Mecánicos
n
n
Aceleración
&x&=
2
MC
+
η Aη h
Condición de máximo:
FL
2π
=
+
p η Aη h TM
n
JM
FL
2π
−
TM
p η Aη h
J
Jh + A
JA
2π
2
+
+
2
η A p
FL
η Aη h TM
2
MC
+
η Aη h ( J M + J A 2 ) + η h ( J h + J A 2 )
Sin fuerzas externas y rendimientos unidad:
(JM +
2
2π
J A + J h )
= M C
p
Lazo Unico de Posición. Compensador P
x
Fp(s)
R(s)
1/Mes2
KP
X(s)
Me
KP
n
Ecuaciones (Inercia Pura):
Fe + F p = M e &x&
Fe = K P [r (t ) − x(t )]
M e &x&+ K P x = K P r (t ) + F p
KP
X ( s)
=
R ( s) M e s 2 + K P
X ( s)
1
=
Fp ( s) M e s 2 + K P
lim x ( t ) = lim sX ( s )
t→ ∞
s→ 0
M es2
1
E ( s) = R ( s) − X ( s) =
R
(
s
)
−
Fp ( s)
2
2
M es + K P
M es + KP
r
Lazo Unico de Posición. Compensador P
Fp(s)
R(s)
KP
1/(Mes2+Cs)
X(s)
C
Fp
x
Me
KP
n
Inercia+Resistencia Viscosa
M e &x&+ Cx& + K P x = K P r (t ) + F p
X ( s)
KP
=
R ( s ) M e s 2 + Cs + K P
X ( s)
1
=
F p ( s ) M e s 2 + Cs + K P
M e s 2 + Cs
1
−
E ( s) = R ( s ) − X ( s ) =
R
(
s
)
Fp (s )
2
2
M e s + Cs + K P
M e s + Cs + K P
lim ε v ( t ) =
t→ ∞
F
C
V− p
KP
KP
r
Lazo Unico de Posición. Compensador P
Lazo Unico de Posición. PD
Fp(s)
R(s)
1/Mes2
KP+KDs
x
X(s)
Me
KP
KD
r
M e &x&+ K D x& + K P x = K P r (t ) + K D r&(t ) + Fp
X ( s)
KDs + KP
=
R ( s) M e s 2 + K D s + K P
ω
0
=
KP
Me
ξ =
X ( s)
1
=
F p ( s) M e s 2 + K D s + K P
KD
2 KPM e
M es2
1
E ( s) = R ( s ) − X ( s) =
R
(
s
)
−
Fp ( s)
2
2
M es + K Ds + KP
M es + KDs + KP
Fp
lim ε v ( t ) = −
t→ ∞
KP
Lazo Unico de Posición. PD
Lazo Unico de Posición. PD
n
Amortiguamiento resistente
C
Fp
Fp(s)
R(s)
1/(Mes2+Cs)
KP+KDs
Me
X(s)
KP
KDs + KP
X ( s)
=
R ( s) M e s 2 + ( K D + C )s + K P
x
KD
X ( s)
1
=
F p ( s) M e s 2 + ( K D + C ) s + K P
M e s 2 + Cs
1
E ( s ) = R ( s ) − X ( s) =
R
(
s
)
−
Fp ( s)
2
2
M e s + ( K D + C)s + K P
M e s + (K D + C )s + K P
lim ε v ( t ) =
t→ ∞
F
C
V− p
KP
KP
r
Lazo Unico de Posición. PD
Lazo Unico de Posición. PI
Fp(s)
R(s)
n
1/Mes2
KP+KI/s
X(s)
Inercia Pura
M e &x&+ K P x + K I ∫ x(τ )dτ = K P r (t ) + K I ∫ r (τ )dτ + F p
t
t
0
0
X ( s)
KP s + KI
=
R ( s) M e s 3 + K P s + K I
n
Criterio de Estabilidad:
X ( s)
s
=
F p ( s) M e s 3 + K P s + K I
a3 > 0 a2 > 0 a2 a1 > a3 a0
a0 > 0
M e s3
s
E ( s) = R ( s ) − X ( s ) =
R
(
s
)
−
F p (s)
3
3
M es + KP s + KI
M es + KP s + KI
lim ε ( t ) = 0
t→ ∞
Consigna escalón y rampa
Lazo Unico de Posición. PI
Fp(s)
R(s)
n
KP+KI/s
1/(Mes2+Cs)
X(s)
Masa + Resistencia Viscosa
M e &x&+ Cx& + K P x + K I ∫ x(τ )dτ = K P r (t ) + K I ∫ r (τ )dτ + F p
t
t
0
0
X (s)
KPs + KI
=
R ( s ) M e s 3 + Cs 2 + K P s + K I
X (s)
s
=
F p ( s) M e s 3 + Cs 2 + K P s + K I
M e s 3 + Cs 2
s
E ( s ) = R ( s ) − X ( s) =
R
(
s
)
−
Fp ( s )
2
2
2
2
M e s + Cs + K P s + K I
M e s + Cs + K P s + K I
KI <
n
El término integral:
K PC
Me
– reduce el amortiguamiento
– aumenta el sobreimpulso
lim ε ( t ) = 0
t→ ∞
Consigna escalón y rampa
71,06.106.1000
N
KI <
= 35,5.106
2000
m.s
Lazo Unico de Posición. PID
Fp(s)
R(s)
n
KP+KI/s+
KDs
Inercia Pura
1/Mes2
X(s)
M e &x&+ K D x& + K P x + K I ∫ x(τ )dτ = K P r (t ) + K D r&(t ) + K I ∫ r (τ ) dτ + Fp
t
t
0
0
X ( s)
K D s2 + K P s + K I
=
R( s) M e s3 + K D s 2 + K P s + K I
n
X ( s)
s
=
F p ( s) M e s 3 + K D s 2 + K P s + K I
Error
M e s3
s
E ( s ) = R ( s) − X ( s ) =
−
R
(
s
)
F p ( s)
M es3 + K D s2 + KP s + K I
M es3 + K D s2 + KP s + K I
n
Criterio de Estabilidad:
KD KP
KI <
Me
755.000.71,06.106
10 N
KI <
= 2,683.10
2000
m.s
Lazo Unico de Posición. PID
Sin término integral
Con término integral
Lazo Unico de Posición. PID
Fp(s)
R(s)
n
KP+KI/s
+KDs
1/(Mes2+Cs)
X(s)
Masa + Resistencia Viscosa
M e &x&+ ( K D + C ) x& + K P x + K I ∫ x(τ )dτ = K P r (t ) + K D r&(t ) + K I ∫ r (τ )dτ + Fp
0
0
t
X ( s)
K D s2 + K P s + K I
=
R ( s ) M e s 3 + ( K D + C )s 2 + K P s + K I
t
X ( s)
s
=
F p ( s) M e s 3 + ( K D + C )s 2 + K P s + K I
M e s 3 + Cs 2
s
E ( s) = R( s) − X ( s) =
R
s
F p ( s)
(
)
−
M e s 2 + ( K D + C )s 2 + K P s + K I
M e s 2 + ( K D + C )s 2 + K P s + K I
KI <
KP ( KD + C )
Me
lim ε ( t ) = 0
t→ ∞
Consigna escalón y rampa
Lazo de Velocidad. PID
Fp(s)
Rv(s)
n
KP+KI/s+
KDs
1/Mes
V(s)
Inercia pura
(Me +
K D )v&+
t
t
0
0
K P v + K I ∫ v(τ )dτ = K P rv (t ) + K D r&v (t ) + K I ∫ r (τ )dτ + F p
V ( s)
KDs2 + KP s + KI
=
Rv ( s) ( M e + K D )s 2 + K P s + K I
V ( s)
s
=
F p ( s ) ( M e + K D )s 2 + K P s + K I
M es2
s
E ( s ) = Rv ( s ) − V ( s ) =
R
(
s
)
−
Fp (s)
v
2
2
M es + KP s + KI
M es + KP s + KI
lim ε ( t ) = 0
t→ ∞
Consigna escalón y rampa
Lazo de Velocidad. PID
ω
0
KI
M e + KD
=
KP
ξ =
=
2 K I ( M e + K D ) 2ω
KP
0 ( M e + KD )
Para una ω 0= 30 Hz, suponiendo KD=0
KI = ω
2
0
(Me +
K D ) = ( 2π .30 ) 2000 = 71,06.10 6
2
Para un amortiguamiento ξ =1, suponiendo C=0
K P = 2ξ ω
0(Me +
K D ) = 2.2π .30.2000 = 753.982
N
m/s
N
m
Lazo de Velocidad. PID
Fp(s)
Rv(s)
n
KP+KI/s+
KDs
1/(Mes+C)
V(s)
Inercia + Resistencia viscosa
(Me +
K D )v&+ ( K P +
C )v +
t
t
0
0
K I ∫ v(τ )dτ = K P rv (t ) + K D r&v (t ) + K I ∫ r (τ )dτ + Fp
V ( s)
KD s2 + KP s + K I
=
Rv ( s) ( M e + K D )s 2 + ( K P + C )s + K I
V ( s)
s
=
F p ( s ) ( M e + K D )s 2 + ( K P + C )s + K I
M e s 2 + Cs
s
E ( s ) = Rv ( s ) − V ( s ) =
R
(
s
)
−
Fp (s)
v
2
2
M es + KP s + KI
M es + KP s + KI
lim ε ( t ) = 0
t→ ∞
Consigna escalón
lim ε ( t ) =
t→ ∞
C
A
KI
Consigna rampa
Lazo de Velocidad. PID
ω
0
=
KI
M e + KD
KP + C
KP + C
ξ =
=
2 K I ( M e + K D ) 2ω 0 ( M e + K D )
Para una ω 0= 30 Hz, suponiendo KD=0
N
K I = ω 0 ( M e + K D ) = ( 2π .30 ) 2000 = 71,06.10
m
Para un amortiguamiento ξ =1, suponiendo C=1000
2
2
6
N
K P = 2ξ ω 0 ( M e + K D ) − C = 2.2π .30.2000 − 1000 = 752.982
m/s
Suponiendo una rampa con máxima aceleración a=2,094 m/s2
lim ε ( t ) =
t→ ∞
C
2000
− 5
A=
2
,
094
=
5
,
894
.
10
m / s = 58,94 µ m / s
6
71.06.10
KI
Lazo de Velocidad. Compensador PI
Fp(s)
Rv(s)
KP+KI/s
V ( s)
KP s + KI
=
Rv ( s ) M e s 2 + ( K P + C )s + K I
ω0=
KI
Me
ξ =
1/(Mes+C)
V(s)
V ( s)
s
=
Fp ( s) M e s 2 + ( K P + C )s + K I
KP + C
K + C
= P
2 K I M e 2ω 0 M e
K I = ω 02 M e
K P = 2ξ ω 0 M e − C
M e s 2 + Cs
s
E ( s) = Rv ( s) − V ( s) =
R
(
s
)
−
Fp ( s)
v
2
2
M e s + ( K P + C )s + K I
M e s + ( K P + C )s + K I
lim ε ( t ) = 0
t→ ∞
Consigna escalón
lim ε v ( t ) =
t→ ∞
C
A
KI
Consigna rampa
Lazo de Velocidad. Compensador P
Fp(s)
Rv(s)
KP
1/(Mes+C)
V ( s)
1
=
Fp ( s) M e s + K P + C
V ( s)
KP
=
Rv ( s) M e s + K P + C
Constante de tiempo
E ( s ) = Rv ( s ) − V ( s ) =
lim ε v ( t ) =
t→ ∞
V(s)
τ =
Me
KP + C
M es + C
1
Rv ( s) −
Fp (s)
M es + KP + C
M es + KP + C
C
1
V−
F
KP + C
KP + C
Consigna escalón
Lazo de Velocidad. Compensador P
Constante de tiempo τ =1/(2π.30)
τ =
Me
KP + C
KP =
→
KP =
Me
− C
τ
2000
− 1000 = 375.991 N /( m / s)
1 ( 2π .30)
Consigna escalónV= 1,5 m/s
lim ε v ( t ) =
t→ ∞
C
1000
V =
1,5 = 3,979.10 − 3 m / s = 0,239 m / min
KP + C
375.991 + 1000
Fuerza de corte F= 1000 N
lim ε v ( t ) = −
t→ ∞
1
1000
= − 2,653.10 − 3 m / s = − 0,159 m / min
F= −
KP + C
375.991 + 1000
Lazo de Velocidad. Resumen
n
n
n
Ki define la frecuencia natural del lazo
Kp define el amortiguamiento o la constante de
tiempo (si no existe Ki)
Errores permanentes
– Si Ki>0 no existe error permanente debido a fuerzas ni
error se seguimiento de consigna escalón
– Si Ki=0 existen ambos errores
n
Kd no aporta gran cosa
Doble Lazo: Posición y Velocidad
R(s)
n
Lazo de Velocidad Ideal
X ( s)
C ( s)
=
R ( s) s + C ( s )
n
Compensador proporcional C(s)=KP
n
1
→
Constante de tiempo τ =
KP
s
E ( s) = R ( s) − X ( s) =
R( s)
s + KP
Consigna rampa
Vref (s)
C(s)
1/s
X(s)
X ( s)
KP
=
R( s) s + K P
K P = 2π .30 = 188,5 (m / s) / m
V
1,5
lim ε ( t ) =
=
= 7,96 mm
t→ ∞
K P 188,5
Lazo de Velocidad Ideal. Compensador PID
n
X ( s)
K D s2 + K P s + KI
=
R ( s) (1 + K D )s 2 + K P s + K I
Compensador PID
ω0=
KI
1+ KD
ξ =
KP
KP
=
2 K I (1 + K D ) 2ω 0 (1 + K D )
s2
E ( s ) = R ( s ) − X ( s) =
R( s)
2
(1 + K D )s + K P s + K I
n
Compensador PI
s2
E ( s) = R( s) − X ( s) = 2
R ( s)
s + KP s + KI
ω0=
ξ =
KI
→
KP
K
= P
2 K I 2ω 0
KI = ω
→
2
0
lim ε ( t ) = 0
t→ ∞
X ( s)
K s + KI
= 2 P
R( s) s + K P s + K I
lim ε ( t ) = 0
t→ ∞
Consigna escalón y rampa
= (2π .30) 2 = 35.531 ( m / s) /(m.s)
K P = 2ξ ω
0
= 2.1.2π .30 = 376,991 ( m / s) / m
Doble Lazo: Posición y Velocidad
Rv(s)
n
Lazo de Velocidad
X v ( s)
Cv ( s )G ( s)
=
Rv ( s) 1 + Cv ( s)G ( s)
R(s)
n
Lazo doble
Cd(s)
Cv(s)
Fp(s)
G(s)
Xv(s)
X v ( s)
G ( s)
=
F p ( s) 1 + Cv ( s)G ( s )
Cv(s)
Fp(s)
G(s)
1/s
X(s)
Doble Lazo: Posición y Velocidad
Fp(s)
n
X ( s)
Gv ( s ) = v
Rv ( s )
n
GFv(s)
Denominando
X (s)
GFv ( s) = v
Fp ( s)
Inercia pura
R(s)
Cd(s)
Gv(s)
1/s
X(s)
1
G( s ) =
Mes
X ( s)
Cd ( s )Gv ( s)
=
R ( s ) s + Cd ( s )Gv ( s)
Cv ( s )
X ( s)
Cd ( s )Cv ( s )
M e s + Cv ( s )
=
=
Cv ( s )
M e s 2 + sCv ( s ) + Cd ( s)Cv ( s )
R ( s ) s + C ( s)
d
M e s + Cv ( s )
X ( s)
GFv ( s)
=
Fp ( s) s + Cd ( s )Gv ( s)
1
X ( s)
M e s + Cv ( s )
1
=
=
F p ( s ) s + C ( s ) Cv ( s )
M e s 2 + sCv ( s ) + Cd ( s )Cv ( s )
d
M e s + Cv ( s )
Cd ( s )
Doble Lazo: Posición y Velocidad
n
Compensadores PD en ambos lazos
( KvP KdD + KvD KdP )s + KvP K dP
X ( s)
=
R ( s ) [M e + K vD (1 + K dD )]s 2 + [K vP (1 + K dD ) + K vD K dP ]s + K vP K dP
X (s)
1
=
F p ( s ) [M e + K vD (1 + K dD )]s 2 + [K vP (1 + K dD ) + K vD K dP ]s + K vP K dP
ω0=
K vP K dP
M e + K vD (1 + K dD )
E ( s) = X ( s) − R ( s) =
[M e +
{[M
ξ =
K vP + K vP K dD + K vD K dP
2 K vP K dP [M e + K vD (1 + K dD )]
}
2
+
K
(
1
+
K
)
]
s
+ K vP s R ( s) − Fp ( s)
e
vD
dD
K vD (1 + K dD )]s 2 + [K vP (1 + K dD ) + K vD K dP ]s + K vP K dP
V
F
lim ε ( t ) =
−
t→ ∞
K dP K vP K dP
Doble Lazo: Posición y Velocidad
n
Compensadores P en ambos lazos
X ( s)
K vP K dP
=
R ( s ) M e s 2 + K vP s + K vP K dP
X ( s)
1
=
F p ( s) M e s 2 + K vP s + K vP K dP
ω0=
K vP K dP
Me
ξ =
lim ε ( t ) =
t→ ∞
1
KvP
1 ω0
=
2 M e K dP 2 K dP
V
F
−
K dP K vP K dP
KvP
Fp
x
Me
KvPKdP
r
Doble Lazo: Posición y Velocidad. Compensadores P
ξ =
1
2
ω0=
K vP
1 ω0
=
M e K dP 2 K dP
K vP K dP
Me
→
Consigna rampa de
velocidad V=1,5 m/s
Fuerza de 1000 N
→
KdP =
K vP =
ω 20 M e
K dP
ω0
= π .30 = 94,248 (m / s ) / m = 5,655 (m / min ) / mm
2ξ
= 2ξ ω 0 M e = 2.1.(2π .30).2000 = 753.982 N /( m / s )
V
1,5
lim ε ( t ) =
=
= 0,0159 m
t→ ∞
K dP 94,248
lim ε ( t ) = −
t→ ∞
F
1000
= −
= 0.014 mm
K vP K dP
753982.94,248
Doble Lazo: Posición y Velocidad
n
Compensadores PD en lazo posición y P en velocidad
K vP K dD s + K vP K dP
X ( s)
=
R ( s ) M e s 2 + K vP (1 + K dD ) s + K vP K dP
X ( s)
1
=
F p ( s) M e s 2 + K vP (1 + K dD ) s + K vP K dP
ω
0
=
K vP K dP
K vP
(1 + K dD )
=
Me
2ξ M e
ξ =
1
(1 + KdD ) KvP = 1 ω 0 (1 + KdD )
2
M e K dP 2 K dP
V
F
lim ε ( t ) =
−
t→ ∞
K dP K vP K dP
Doble Lazo: Posición y Velocidad. Compensadores PD
ξ =
ω
0
1 ω0
(1 + KdD ) →
2 K dP
=
K vP K dP
Me
→
Consigna rampa de
velocidad V=1,5 m/s
K dP
ω
= 0 = π .30 = 94,248 (m / s ) / m = 5,655 ( m / min ) / mm
1 + K dD 2ξ
K vP =
ω 02 M e
K dP
lim ε ( t ) =
t→ ∞
=
2ξ ω 0 M e 2.1.(2π .30).2000 753.982
N /( m / s)
=
=
1 + K dD
1 + K dD
1 + K dD
V
2ξ V
2.1.1,5
0,0159
m
=
=
=
K dP ω 0 (1 + K dD ) 2π .30(1 + K dD ) 1 + K dD
Se consigue una mejora con relación al resultado obtenido sin KD
Fuerza de 1000 N
F
1000
lim ε ( t ) = −
= −
= 0,014mm
t→ ∞
K vP K dP
753982.94,248
Es el mismo resultado obtenido sin KD
Doble Lazo: Posición P y Velocidad PI
X ( s)
K vP K dP s + K vI K dP
=
R ( s ) M e s 3 + K vP s 2 + ( K vI + K vP K dP ) s + K vI K dP
X (s)
s
=
Fp ( s) M e s 3 + K vP s 2 + ( K vI + K vP K dP ) s + K vI K dP
2
K vP
K vI <
M e − K vP K dP
K vP > KdP M e
→
753.982 > 94,248.2000 = 188496
E ( s ) = R ( s ) − X ( s) =
lim ε ( t ) =
t→ ∞
V
K dP
o bien
(M s
e
3
)
+ K vP s 2 + K vI s R ( s) − sFp ( s)
M e s 3 + K vP s 2 + ( K vI + K vP K dP ) s + K vI K dP
Error idéntico a los casos anteriores
No hay error debido a la fuerza de corte
Doble Lazo: Posición PI y Velocidad P
X ( s)
K vP K dP s + K vP K dI
=
R ( s ) M e s 3 + K vP s 2 + K vP K dP s + K vP K dI
X (s)
s
=
F p ( s) M e s 3 + K vP s 2 + K vP K dP s + K vP K dI
K dI <
n
K vP K dP 753982.94,25
=
= 35.531 ( m / s) /( m.s )
Me
2000
El compensador integral del lazo de posición es más crítico
que el del lazo de velocidad
E ( s) = R ( s ) − X ( s ) =
n
(M s
e
3
)
+ K vP s 2 R ( s) − sFp ( s)
M e s 3 + K vP s 2 + K vP K dP s + K vP K dI
Error permanente nulo a escalón y a rampa
Doble Lazo: Posición PID y Velocidad P
X ( s)
K vP K dD s 2 + K vP K dP s + K vP K dI
=
R ( s) M e s 3 + K vP (1 + K dD ) s 2 + K vP K dP s + K vP K dI
X ( s)
s
=
F p ( s) M e s 3 + K vP (1 + K dD ) s 2 + K vP K dP s + K vP K dI
K dI <
K vP K dP
(1 + K dD )
Me
E ( s) = R ( s) − X ( s) =
(M s
e
3
)
+ K vP s 2 R ( s) − sFp ( s )
M e s 3 + K vP (1 + K dD ) s 2 + K vP K dP s + K vP K dI
Doble Lazo Posición y Velocidad. Resumen
n
n
n
n
Un controlador P-P da lugar a un sistema de 2º orden en
que pueden ajustarse w0 y ξ .
Un término D en el lazo de posición mejora el
amortiguamiento del conjunto y permite incrementar KdP
lo que reduce el error de seguimiento
En el lazo de velocidad el término I elimina el error de
fuerzas pero no el debido a una consigna en rampa
En el lazo de posición el compensador I elimina ambos
errores pero empeora más la estabilidad
Elasticidad del Accionamiento
K
n
Ecuaciones
M1
M 1 &x&1 + C ( x&1 − x&2 ) + K ( x1 − x2 ) = f1
M 2 &x&2 + C ( x&2 − x&1 ) + K ( x2 − x1 ) = f 2
M2
C
X1
X2
X1
M 2 s 2 + Cs + K
=
F1 M 1M 2 s 4 + ( M 1 + M 2 )Cs3 + ( M 1 + M 2 )Ks 2
X2
Cs + K
=
F1 M 1M 2 s 4 + ( M 1 + M 2 )Cs 3 + ( M 1 + M 2 )Ks 2
n
Realimentación con v1
V1 ( s)
=
Rv ( s) ( M 1 M 2 + M 2 K D ) s 3 +
n
[( M 1 +
( K P + K D s )( M 2 s 2 + Cs + K )
M 2 )C + M 2 K P + K D C ]s 2 + [( M 1 +
Sistema siempre estable
M 2 )K + K D K + K P C ]s + K P K
Elasticidad del Accionamiento
n
Realimentación con la velocidad de la masa 2
V2 ( s )
=
R ( s ) M 1M 2 s 3 +
n
[( M 1 +
M 2 )C +
( K P + K D s )( Cs + K )
K DC ]s 2 + [( M 1 + M 2 )K +
K P C + K D K ]s + K P K
Aplicando Routh
a2 a1 − a3a0 > 0 →
[( M 1 +
M 2 )C + K D C ][( M 1 + M 2 )K + K P C + K D K ] > M 1M 2 K P K
( M 1 + M 2 + K D ) 2 KC
KP <
M 1M 2 K − ( M 1 + M 2 + K D )C 2
n
n
Si C=0 el sistema es siempre inestable
La realimentación y control con masas diferentes resulta
difícil de estabilizar
Elasticidad del Accionamiento
K
n
Ecuaciones
M1
M 1 &x&1 + C ( x&1 − x&2 ) + K ( x1 − x2 ) = f1
M2
C
M 2 x&&2 + C ( x&2 − x&1 ) + K ( x2 − x1 ) = f 2
X1
X2
X1
M 2 s 2 + Cs + K
=
F1 M 1M 2 s 4 + ( M 1 + M 2 )Cs 3 + ( M 1 + M 2 )Ks 2
X2
Cs + K
=
F1 M 1M 2 s 4 + ( M 1 + M 2 )Cs 3 + ( M 1 + M 2 )Ks 2
n
Realimentación con x1
X 1 ( s)
=
R ( s ) M 1M 2 s 4 +
n
[( M 1 +
M 2 )C +
( K P + K D s )( M 2 s 2 +
M 2 K D ]s 3 + [( M 1 + M 2 )K +
Cs + K )
M 2 K P + K DC ]s 2 + ( K D K + K P C )s + K P K
Sistema estable siempre que C o KD sean no nulos
Elasticidad del Accionamiento
n
Realimentación con la masa 2
X 2 ( s)
=
R ( s ) M 1M 2 s 4 + ( M 1 + M 2 )Cs 3 +
n
( KP +
[( M 1 +
K D s )( Cs + K )
M 2 )K + K DC ]s 2 + ( K D K + K P C )s + K P K
Aplicando Routh
a2a3 − a1a4 > 0 →
[( M 1 +
M 2 )K + K DC ]( M 1 + M 2 )C − ( K D K + K P C )M 1M 2 > 0
M + M2
[( M 1 + M 2 )K + K DC ]− K D K
KP < 1
M 1M 2
C
( M1 +
M 2 ) K − M 1M 2 K P
KD <
C
2
M 1M 2 K − ( M 1 + M 2 )C
2
a1 ( a2a3 − a1a4 ) − a32a0 > 0 →
( KD K +
n
n
K P C ){[( M 1 + M 2 )K + K DC ]( M 1 + M 2 )C − ( K D K + K P C )M 1M 2 }− ( M 1 + M 2 ) C 2 K P K > 0
2
Si C=0 el sistema es siempre inestable
La realimentación y control con masas diferentes resulta
difícil de estabilizar
Accionamiento Elástico. Respuesta Dinámica
Kvp=754 kN/(m/s),
Kvi =71,0 MN/m
Kdp =125,7 (m/s)/m
Kvi =71,0 MN/m
Kdp =62,8 (m/s)/m
x1
x2
Kdi=0
Kvi =0 MN/m
Kdp =125,7 (m/s)/m
Kvi =0 MN/m
Kdp =62,8 (m/s)/m