Capitulo 6
Anuncio

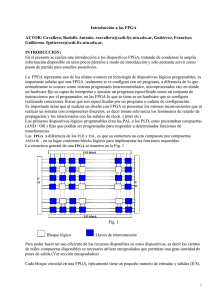
Capítulo 6 Capítulo 6 Pruebas y Resultados En este capítulo, se hablará de las pruebas que se realizaron al sistema, partiendo desde el modulador PWM, hasta el sistema realizando trazos. Es importante destacar que el trazo realizado con un sistema como éste no debe ser comparado al trazo realizado con un Plotter, ya que este realiza el movimiento controlando solamente (X, Y), mientras que el servo utiliza (X, Y, Z), así que se tiene vectores tridimensionales, esto incrementa el grado de complejidad. 51 Capítulo 6 6.1 La Interfaz de Control. Como se mencionó con anterioridad, el circuito de control externo fue diseñado en VHDL y posteriormente sintetizado hacia un FPGA, para realizar las pruebas de éste se utilizó la tarjeta de evaluación DIGILAB 1. Este dispositivo se divide en la tarjeta contenedora del FPGA (ver Fig. 6.1), y otro modulo formado por un grupo de Interruptores, LEDs, Botones, Displays etc. (Fig. 6.2). Fig. 6.1 Módulo contenedor del FPGA. Fig. 6.2 Módulo de evaluación Digilab 52 Capítulo 6 Empleando dos módulos de evaluación, se puede emular el funcionamiento del Puerto Paralelo, utilizando los interruptores se ingresan los datos y con un interruptor más se genera la señal de Strobe, los Leds fueron “Mapeados” al bus interno del banco de registros, de esta forma podemos verificar que los datos que se cargan sean correctos, y finalmente las salidas o los canales PWM se observaron en un analizador lógico HP1663A (Fig. 6.3). Fig. 6.3 Prueba realizada en Analizador Lógico. Como se puede notar en la figura 6.3, observamos las cinco señales PWM, esta prueba demostró como la frecuencia de 50 Hz que se pretendía lograr se obtuvo realmente como 50.9 Hz, esta es una aproximación muy buena, esta ligera diferencia se debe al truncamiento de los decimales del valor calculado por la computadora, para el registro de cada canal. 53 Capítulo 6 6.2 Pruebas del Sistema Terminado. Finalmente al tener todo el sistema armado se continúa con la prueba de éste, así que utilizando el programa de control se desarrollaron los trazos de las figuras preprogramadas mencionadas con anterioridad, estas pruebas son las siguientes (Fig. 6.4): Fig. 6.4 Trazos realizados Por el Brazo. 54 Capítulo 6 Como se puede notar las figuras tienen algunas imprecisiones, ésto es debido a que el torque asociado a los servos del hombro, es decir el par de servos que actúan en paralelo es insuficiente para el peso actual del brazo, por lo tanto al alejar la pinza del origen la altura Z determinada por el usuario se decrementa proporcionalmente, mas no de forma lineal, cerrando el ángulo que hace el brazo con la horizontal, de esta forma al tener una distancia más grande, el servomecanismo es incapaz de realizar la fuerza suficiente para poder mantener el trazo estable, ésto se puede notar con las pruebas, ya que por ejemplo, los ángulos que están más cercanos al origen se logran bastante bien, mientras que los ángulos que están más alejados se “curvean” de una forma bastante crítica, desafortunadamente este problema no puede ser corregido con el control generado, ya que no hay forma de obtener una retroalimentación de la posición actual. Este error se ve también reflejado en la ecuación 4.7, mencionada en el capítulo 4, desafortunadamente este error no se presenta en forma lineal, por esta razón no se puede hablar de un porcentaje de error. Aunque este error se mejora acotando el área de trazado a una área mas reducida, no se puede eliminar sustancialmente, ya que el error se presenta tanto cuando el brazo se inclina hacia delante, como cuando se inclina hacia atrás. Cada punto del trazo es generado siguiendo el procedimiento de conversión de coordenadas que se vio en el capitulo 4, en dicha sección se puede notar como durante los cálculos jamás se varia la altura o coordenada “Z”, de esta forma se puede descartar que la falla sea un problema del modelado. 55