resolución del problema mcp mediante una función d-gap
Anuncio

RESOLUCIÓN DEL PROBLEMA MCP MEDIANTE UNA
FUNCIÓN D-GAP
Blanco Louro, A., Lema Fernández, Carmen S., Pedreira Andrade, Luis P.
Departamento de Economía Aplicada II. Universidad de A Coruña.
Facultad de CC. Económicas y Empresariales.
Campus da Zapateira s/n. 15071 A Coruña.
Telf. 981167000
Fax 981167070
e-mail: amaliabl@udc.es, colito@udc.es, lucky@udc.es
Resumen
En este trabajo estudiamos un ejemplo de equilibrio en una red de tráfico (MCP).
Estudiado ya por Dirkse y Ferris (1995) y posteriormente por Billups y Murty (2000)
nos ilustra la conexión entre el equilibrio y la complementariedad. En particular el
problema de complementariedad no lineal puede ser reformulado como un problema de
desigualdades variacionales (VIP). Nosotros introducimos un método (Kanzow y
Fukushima (1998)) para resolver el problema de desigualdades variacionales. Este es
básicamente un método Newton globalizado que utiliza, en vez de una función merit
normal para resolver el VIP, una función D-gap. También el algoritmo que se propone
es global y rápidamente local convergente.
Palabras clave: problemas de complementariedad mixta, residuo natural, función
D-gap, método de Newton nonsmooth, convergencia Q-cuadrática, equilibrio.
1. INTRODUCCIÓN
El problema de complementariedad no lineal (NCP), introducida en su tesis doctoral por
Cottle en 1964, se puede plantear como:
encontrar
z ∈ IR n
verificando
z≥0
F(z) ≥ 0
z T F(z) ≥ 0
donde tomamos F:IRn→IRn continuamente diferenciable.
Una generalización de este problema es el de desigualdades variacionales (VIP),
introducido por Hartman y Stampacchia en 1966, con el objetivo de encontrar los
puntos que cumplen la condición necesaria de primer orden de Kuhn-Tucker para
programas de optimización no lineal. El VIP se puede plantear como:
Sea una función F:IRn→IRn continuamente diferenciable y sea K⊆IRn convexo no
vacío,
encontrar
z* ∈ K
verificando ( y − z*) T F(z*) ≥ 0 ∀y ∈ K
y denotarlo por VI(F,K).
Consideremos ahora el problema anterior en un caso especial de conjunto factible,
B=[l,u]={z∈IRn / l≤z≤u}, siendo u y l dos vectores n-dimensionales con componentes
li∈IR∪{-∞} y ui∈IR∪{∞} verificando l<u, donde las desigualdades de vectores las
consideramos componente a componente. En este caso el problema de desigualdades
variacionales se llama problema de complementariedad mixta (MCP).
Además si li=0 y ui=+∞, i=1, ..., n, MCP es equivalente al NCP, esto es, tienen el
mismo conjunto de soluciones.
En este artículo resolvemos un problema MCP que utiliza un tipo especial de función
merit, las D-gap, que serán introducidas en la sección 2. En la sección 3 planteamos el
problema de equilibrio de tráfico cuya algoritmo de resolución presentamos en la
sección 4. Finalizamos el estudio presentando resultados sobre la convergencia de éste.
La obtención de resultados numéricos aplicando este algoritmo a nuestro problema será
objeto de posteriores trabajos de los autores.
2. LAS FUNCIONES D-GAP
Para resolver los problemas planteados es habitual buscar reformulaciones de los
mismos que los conviertan en problemas de optimización o de resolución de sistemas de
ecuaciones vía funciones merit.
Definición.- Una función ψ:IRn→IR se llama función merit para el NCP
(respectivamente, MCP) si cumple las siguientes propiedades:
ψ(x)≥0 ∀x∈IRn
i)
ψ(x)=0 ⇔ x es solución de NCP (respectivamente, MCP)
ii)
Si tenemos definida una función merit para el problema, entonces buscar soluciones se
reduce a resolver el sistema
ψ(x)=0
o el problema de optimización sin restricciones
min ψ(x), x∈IRn
Así mismo, para los problemas de complementariedad mixta se han utilizado funciones
que generalizan las funciones merit, como puede ser la función gap definida por
g(x)= sup{F( x ) T ( x − y)}
y∈B
Claramente g es una función no negativa sobre el conjunto factible B y tal que g(x)=0 si
y sólo si x resuelve el MCP. Ello nos permite reescribir el problema como uno de
optimización con restricciones del siguiente modo
min g(x)
s.a.
x∈B
Sin embargo, la resolución de este problema no resulta sencilla ya que no se pueden
utilizar los teoremas clásicos de optimización al no ser, en general, la función gap
diferenciable. Este inconveniente se subsana definiendo la función gap regularizada
α
2
g α ( x ) = max F( x ) T ( x − y) − x − y
2
y∈B
donde α es un parámetro positivo.
Como la expresión entre llaves es una función cuadrática estrictamente cóncava en la
variable y, tiene un único máximo que coincidirá con el punto crítico,
1
y α ( x ) = ∏ B x − F( x ) ,
α
donde ∏ B ( z) denota la proyección euclídea del vector z sobre el conjunto B. Usando
esto se puede escribir la función gα como
α
2
x − y α (x)
2
gα es también no negativa sobre B y las soluciones del MCP coinciden con los puntos
de B donde se anula. Así el MCP es equivalente al problema de optimización con
restricciones
min gα(x)
s.a.
x∈B
donde la función objetivo es ahora continuamente diferenciable.
Yamashita, Taji y Fukushima (1997), extendiendo una idea de Peng (1997), definen la
función D-gap
g αβ ( x ) = g α ( x ) − g β ( x )
g α ( x ) = F( x ) T ( x − y α ( x )) −
donde 0<α<β, que obviamente es también continuamente diferenciable, pero que tiene
la ventaja de ser una función merit y de permitirnos, por tanto, transformar nuestro
problema en uno de optimización sin restricciones
min gαβ(x)
o en un sistema de ecuaciones
gαβ(x) = 0.
3. PLANTEAMIENTO DE UN PROBLEMA DE EQUILIBRIO
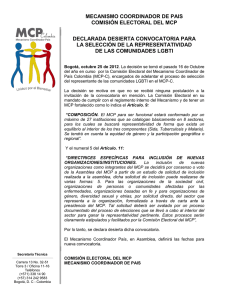
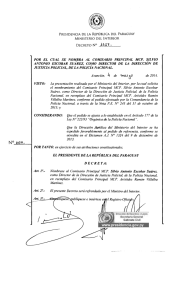
El problema que tratamos de resolver en este trabajo es un ejemplo de equilibrio en una
red de tráfico que ha sido estudiado por Dirkse y Ferris (1995) y más tarde por Billups
y Murty (2000). Involucra a cinco ciudades conectadas por una red de carreteras de un
solo sentido (ver la figura).
1
2
5
3
4
Observemos en el dibujo que hay cuatro tipos de enlaces:
(a) Autopistas
(b) Carreteras de circunvalación
(c) Accesos a la ciudad
(d) Salidas de la ciudad
Cada ciudad i ha de enviar una cantidad di de mercancía a la tercera ciudad si nos
movemos en el sentido contrario a las agujas del reloj, es decir, a la ciudad i+3 módulo
5. Los posibles trayectos para hacerlo son únicamente dos: por el camino interior o por
el exterior.
El objetivo es enviar las mercancías en el menor tiempo posible, teniendo en cuenta que
el tiempo de viaje por un camino dado viene determinado por el flujo total de trafico en
los enlaces que se recorren.
Denotamos por xi la cantidad de mercancía enviada desde al ciudad i a la ciudad i+3
módulo 5 por el camino exterior y denotamos por yi la cantidad enviada por el camino
interior. Entonces, claramente, los vectores x=(xi) e y=(yi) determinan los flujos a través
de los caminos. Así, por ejemplo, el flujo de tráfico por la circunvalación exterior de la
ciudad 4 se corresponde con la suma de los flujos exteriores que han de pasar por esta
ciudad pero que no la tienen como destino u origen, esto es, x2+x3.
Diremos que un conjunto de flujos x, y es factible si satisface la demanda d=(di), es
decir, si x+y≥d, x,y≥0.
Denotaremos por Oi el retraso ocasionado por el envío de mercancías por el camino
exterior desde la ciudad i, que obviamente depende de todo el flujo por las vías
exteriores y por tanto de x. Análogamente Ii denota retraso ocasionado por el envío de
mercancías por el camino interior desde la ciudad i. De este modo tenemos definidas
dos funciones O(x) = (Oi(x)) y I(y) = (Ii(y)).
El retraso en cada tipo de enlace depende, evidentemente, del flujo por la propia vía,
pero además a veces influye el flujo por carreteras cercanas. En todo caso la demora por
una vía viene dada en términos de una función convexa g y de un parámetro positivo γ
por:
(a)
Autopista: 10 g(flujo de la vía) + 2 γ g(flujo de salida de la vía)
(b)
Carreteras de circunvalación: g(flujo de la vía)
(c)
(d)
Acceso a la ciudad: g(flujo de la vía)
Salida de la ciudad: g(flujo de la vía) + γ g(flujo por la circunvalación
correspondiente)
Por supuesto que estamos suponiendo que aquellos trayectos que no tienen por destino
una ciudad la circunvalan en lugar de entrar en ella. Siguiendo a Dirkse y Ferris (1995)
tomaremos g(x) = 1+x+x2.
Definimos el retraso efectivo entre dos ciudades como el mayor retraso con flujo no
nulo entre las dos ciudades. Cada población elige su estrategia de transporte con el
objetivo de minimizar el retraso efectivo, suponiendo que las estrategias de transporte
del resto de las ciudades no varían. Este mínimo se alcanza siempre cuando se envía
toda la mercancía por el camino con menor retraso, o cuando los dos posibles trayectos
para el transporte tienen el mismo retraso. Para ver esto hemos de darnos cuenta de que
si el retraso por el camino interior es menor que por el exterior y la cantidad de
mercancía enviada por el exterior no es nula, el transportista puede mejorar el retraso
efectivo enviando más cantidad por el camino interior. De este modo se reduce también
el flujo a través del camino exterior, y por tanto el retraso efectivo, y podríamos
concluir que ésta no era una estrategia óptima.
Por tanto un modelo de equilibrio de tráfico surge cuando las cinco ciudades están
cumpliendo la estrategia óptima suponiendo que la de las demás permanezca constante.
De la discusión anterior se deduce que el problema viene dado por las siguientes
condiciones de complementariedad:
u-O(x)≥0
x ≥0
xT (u-O(x)) =0
u-I(y)≥0
y ≥0
yT (u-I(y)) =0
x+y-d≥0
u ≥0
uT (x+y-d) =0
en las que hemos introducido una variable adicional u∈IR5 que representa el retraso
efectivo.
Es decir, nuestro problema lo podemos plantear como un NCP considerando la función
x u − O( x )
G y = u − I( y )
u x + y − d
Si consideramos además que la demanda no puede excederse, es decir, x+y=d el
problema se puede reformular como uno de desigualdades variacionales VI(T,X), donde
x O( x )
G =
y I( y)
x
y donde X= / x + y = d, x ≥ 0, y ≥ 0 .
y
Obsérvese que con el primer planteamiento el número de variables es 15, cantidad que
se ha reducido a 10 en el segundo. Podemos, sin embargo, considerar una formulación
más compacta percatándonos de que si B={z∈IR5 / 0≤z≤d} entonces, X={a+Az / z∈B}
0
I
siendo a = y A = .
d
− I
Expresando VI(T,X) en términos de z, tenemos la condición
T(a+Az*)T [(a+Az)- (a+Az*)] = [AT T(a+Az*)]T (z-z*) ≥ 0 ∀z∈B.
Entonces para
F(z) = AT T(a+Az) = O(z)-I(d-z),
VI(T,X) es equivalente a VI(F,B), que es el MCP de 5 variables que trataremos de
resolver.
4. ALGORITMO DE RESOLUCIÓN
Una conocida reformulación del MCP es la resolución del sistema de ecuaciones no
lineales
r(x)=0
(1)
n
n
donde r:IR → IR , es la función residuo natural del MCP:
r(x)= x − ∏ B ( x − F( x )) .
Resolveremos este sistema para solucionar el problema de equilibrio. Para esto,
usaremos la variante del método de Newton nonsmooth propuesta por Kanzow y
Fukushima (1998), que usa la función D-gap como control de convergencia.
Debido a la especial estructura del conjunto B=[0,d] la i-ésima componente del residuo
natural es
ri(z) = zi – mid{0,di,zi-Fi(z)}
= mid{zi, zi-di, Fi(z)}
donde mid denota la mediana del conjunto.
Como F(z)=O(z)-I(d-z) es polinómica, y por tanto continuamente diferenciable, el
residuo es piecewise smooth. Así la B-subdiferencial (Qi (1993))
∂ B r (z) = {H ∈ M n / ∃z k tal que z = lim z k , ∃JF(z k ) ∀ k y H = lim JF(z k )} ,
k →∞
k →∞
(donde JF denota la matriz jacobiana de F) y la jacobiana generalizada de Clarke
∂r (z) = conv{∂ B r (z)} ,
(donde por conv entendemos la envolvente convexa del conjunto) están bien definidas.
Además r es semismooth, i.e., existe
lim
Hd'
H∈∂r ( z + td ')
d '→ d , t → 0 +
para cada x,d∈IRn. Como además JF es localmente lipschitziana podemos afirmar que
el residuo natural r es fuertemente semismooth (Kanzow y Fukushima (1998)).
El algoritmo propuesto para resolver el sistema de ecuaciones fuertemente semismooth
(1) toma como dirección de Newton una solución, si existe, de la ecuación lineal
H k d = -r(zk )
(2)
k
donde Hk es un elemento arbitrario de ∂Br(z ). Esta ecuación la podemos escribir de un
modo más sencillo si nos fijamos en la estructura que, en esta situación particular,
tienen los elementos de la B-subdiferencial.
Sea H un elemento de ∂Br(z) y sea Hi· la i-ésima fila de H. Obviamente, si tomamos
α = α(z) = {i/0<zi-Fi(z)<di}
β = β(z) = {i/zi-Fi(z)=0 o zi-Fi(z)=di}
γ = γ(z) = {i / zi-Fi(z)<0 o zi-Fi(z)>di}
entonces
Hi·= ∇Fi(z)T
si i∈α
Hi·= ∇Fi(z)T o Hi·= eiT
si i∈β
T
Hi·= ei
si i∈γ
Por tanto H es de la forma
JF(z) α ∪ δ, α ∪ δ JF(z) α ∪ δ, δ ∪ γ
H=
0 δ ∪ γ, α ∪ δ
I δ ∪ γ, δ ∪ γ
donde ∅⊆δ⊆β y δ =β\δ. Así el sistema de ecuaciones (2) se puede escribir de forma
más explícita como
JF(z k ) α ∪ δ, α ∪ δ d α ∪ δ
dδ∪γ
= − rα ∪ δ (z k ) + JF(z k ) α ∪ δ, δ ∪ γ r δ ∪ γ (z k )
=
− r δ ∪ γ (z k )
Algoritmo 1 (Kanzow y Fukushima (1998))
Paso 0 Escoger x0∈IRn, 0<α<1<β, ρ>0, λ,η∈(0,1),σ∈(0,1/2), p>1, ε>0
Sea k=0
Paso 1 (control de convergencia)
Si ∇g αβ (z k ) ≤ ε , STOP.
Paso 2 Seleccionar un elemento Hk∈∂Br(zk)
Paso 3 (búsqueda de la dirección de Newton)
Resolver la ecuación de newton Hkd=-r(zk)
Si tiene solución le llamamos dk
En otro caso dk= - ∇g αβ (z k ) . GO TO Paso 6
Paso 4 Si g αβ (z k + d k ) ≤ η g αβ (z k ) entonces tk=1 GO TO Paso 7
Paso 5 (condición de descenso)
Si dk no verifica ∇g αβ (z k ) T d k ≤ −ρ d k
p
entonces dk=- ∇g αβ (z k )
Paso 6 (longitud del paso)
Sea t k = max {λn / g αβ (z k + t k d k ) ≤ g αβ (z k ) + σ t k ∇g αβ (z k ) T d k }
n = 0,1,...
Paso 7 zk+1=zk+tkdk
k=k+1
GO TO Paso 1
5. ANALISIS DE CONVERGENCIA
En este apartado presentamos algunos resultados sobre las propiedades de convergencia
del algoritmo.
Teorema 2.- (Kanzow y Fukushima (1998)) Todo punto de acumulación de la sucesión
generada por el algoritmo anterior es un punto estacionario de la función D-gap gαβ.
En Kanzow y Fukushima (1998) se asegura además que este punto estacionario z* de
gαβ es la única solución del MCP, siempre que la matriz jacobiana JF(z*) sea una Pmatriz. Esta condición no es válida para nuestro problema de equilibrio, por lo que en
trabajos posteriores trataremos de encontrar una condición aplicable a nuestro problema
que nos garantice las mismas conclusiones.
Bajo ciertas condiciones que definimos a continuación vamos a ver que la convergencia
del algoritmo es Q-cuadrática.
Definición.- Diremos que una solución z* del MCP es b-regular si las submatrices
JF (z*) α ∪ δ, α ∪ δ
son no singulares para todos los conjuntos ∅⊆δ⊆β.
Obsérvese que si z* es una solución b-regular del MCP entonces todos los elementos de
la B-subdiferencial son no singulares.
El resultado anunciado sobre velocidad de convergencia del Algoritmo 1 se obtiene
usando la observación anterior, el Teorema 2, la lipschitzianidad local de la matriz
jacobiana JF y la relación entre el crecimiento de la función D-gap y del residuo natural
que viene dada por la proposición siguiente.
Proposición 3.- (Kanzow y Fukushima (1998)) Sean 0<α<1<β. Existen entonces
constantes c1>0 y c2>0 tales que
c1 r (z)
2
≤ g αβ (z) ≤ c 2 r (z)
2
∀z∈IRn.
Teorema 4.- (Kanzow y Fukushima (1998))
Sea {zk} una sucesión generada por el algoritmo. Supongamos que z* es un punto de
acumulación de {zk} tal que z* es una solución b-regular del MCP. Entonces:
i)
ii)
iii)
iv)
lim z k = z*
k →∞
La dirección de Newton dk es, para casi todo k, la solución de la ecuación
(2).
El test del Paso 4 es casi siempre afirmativo, y así tk=1 para todo k
suficientemente grande.
La convergencia de la sucesión es Q-cuadrática.
El principal problema del Algoritmo 1 es el gran número de evaluaciones que se
necesitan en el cálculo de la longitud del paso. Sin embargo el teorema anterior, además
de aportarnos información sobre la velocidad de convergencia, asegura que el Paso 6
hay que realizarlo solamente en un número limitado de iteraciones, lo que aminora el
inconveniente.
Referencias
Billups, S.C. y Murty, K.G. (2000). Complementarity problems. Journal of
Computational and Applied Mathematics, 124, pp 303-318.
Dirkse, S.P. y Ferris, M.C. (1995) MCPLIB: A Collection of Nonlinear Mixed
Complementarity Problems. Optimization Methods and Software, 5, pp 319-345.
Kanzow, C. y Fukushima, M. (1998). Solving box constrained variational inequalities
by using the natural residual with D-gap function globalization. Operations Research
Letters, 23, pp 45-51.
Peng, J.M. (1997). Equivalence of variational inequality problems to unconstrained
minimization. Mathematical Programming, 78, pp 347-355.
Qi, L. (1993). Convergence analysis of some algorithms for solving nonsmooth
equations. Mathematics of Operations Research, 18, pp 227-244.
Yamashita, N.; Taji, K. y Fukushima, K. (1997). Unconstrained optimization
reformulations of variational inequality problems. Journal of Optimization Theory and
Applications, 92, pp 439-456.