PDF - Universidad Católica San Pablo
Anuncio

Algoritmos Evolutivos en Optimización Multiobjetivos
(MOEA)
Dr. Yván Jesús Túpac Valdivia
Universidad Católica San Pablo
Universidad Nacional de San Agustín
23 de Noviembre de 2011
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
1 / 37
Optimización Evolutiva Multiobjetivos
Motivación
Motivación
Muchos problemas de la vida real pueden tratarse como optimización
de un único objetivo, pero
La mayoría de problemas tienen varios objetivos para satisfacer y aún,
algunos pueden ser conflitivos.
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
2 / 37
Optimización Evolutiva Multiobjetivos
Motivación
Motivación
Muchos problemas de la vida real pueden tratarse como optimización
de un único objetivo, pero
La mayoría de problemas tienen varios objetivos para satisfacer y aún,
algunos pueden ser conflitivos.
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
2 / 37
Optimización Evolutiva Multiobjetivos
Motivación
Motivación
Muchos problemas de la vida real pueden tratarse como optimización
de un único objetivo, pero
La mayoría de problemas tienen varios objetivos para satisfacer y aún,
algunos pueden ser conflitivos.
Estos problemas suelen tratarse como problemas de único objetivo,
viendo los demás objetivos como restricciones
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
2 / 37
Optimización Evolutiva Multiobjetivos
El Problema de Optimización Multiobjetivo (MOP)
Optimización Evolutiva Multiobjetivos
Conocido también como optimización multicriterio, se define en
palabras como el problema de:
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
3 / 37
Optimización Evolutiva Multiobjetivos
El Problema de Optimización Multiobjetivo (MOP)
Optimización Evolutiva Multiobjetivos
Conocido también como optimización multicriterio, se define en
palabras como el problema de:
Encontrar un vector de variables de decisión que satisfagan restricciones y
optimicen una función vectorial cuyos elementos representan funciones
objetivo.
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
3 / 37
Optimización Evolutiva Multiobjetivos
El Problema de Optimización Multiobjetivo (MOP)
Optimización Evolutiva Multiobjetivos
Conocido también como optimización multicriterio, se define en
palabras como el problema de:
Encontrar un vector de variables de decisión que satisfagan restricciones y
optimicen una función vectorial cuyos elementos representan funciones
objetivo.
Ya no se busca una solución óptima, sino un conjunto de soluciones
posibles de calidad equivalente.
El espacio de búsqueda se convierte en parcialmente ordenado, donde
existe un conjunto de soluciones trade-offs óptimas entre los objetivos
conflictivos, que puedan ser aceptadas por el tomador de decisiones
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
3 / 37
Optimización Evolutiva Multiobjetivos
El Problema de Optimización Multiobjetivo (MOP)
MOP – Definición Formal
Un MOP consiste en encontrar el vector [x∗ = {x1 , . . . , xn ]T que cumpla:
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
4 / 37
Optimización Evolutiva Multiobjetivos
El Problema de Optimización Multiobjetivo (MOP)
MOP – Definición Formal
Un MOP consiste en encontrar el vector [x∗ = {x1 , . . . , xn ]T que cumpla:
m restricciones de desigualdad.
gi (x) ≥ 0, i = 1, . . . , m
(1)
p restricciones de igualdad.
hi (x) = 0, i = 1, . . . , p
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
(2)
23 de Noviembre de 2011
4 / 37
Optimización Evolutiva Multiobjetivos
El Problema de Optimización Multiobjetivo (MOP)
MOP – Definición Formal
Un MOP consiste en encontrar el vector [x∗ = {x1 , . . . , xn ]T que cumpla:
m restricciones de desigualdad.
gi (x) ≥ 0, i = 1, . . . , m
(1)
p restricciones de igualdad.
hi (x) = 0, i = 1, . . . , p
(2)
y optimice la función vectorial
F(x) = [f1 (x), f2 (x), . . . , fk (x)]T
(3)
de k funciones objetivo fi (x), ∀i = 1, . . . , k, así:
F = fi : X 7→ Yi : 0 < i ≤ k, Yi ⊆ R
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
(4)
4 / 37
Optimización Evolutiva Multiobjetivos
El Problema de Optimización Multiobjetivo (MOP)
Noción de Óptimo en MOP
Habiendo más de una función objetivo F(x) = [f1 (x), . . . , fk (x)]T a
optimizar, cambia la noción de óptimo, pues es muy raro que un punto x
optimize simultáneamente todos los objetivos F(x) de un problema
multiobjetivo. En vez de esto, se intenta encontrar un conjunto de
soluciones que sean buenos compromisos (trade-offs) entre los diversos
objetivos fi más que una solución óptima.
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
5 / 37
Optimización Evolutiva Multiobjetivos
El Problema de Optimización Multiobjetivo (MOP)
Noción de Óptimo en MOP
Habiendo más de una función objetivo F(x) = [f1 (x), . . . , fk (x)]T a
optimizar, cambia la noción de óptimo, pues es muy raro que un punto x
optimize simultáneamente todos los objetivos F(x) de un problema
multiobjetivo. En vez de esto, se intenta encontrar un conjunto de
soluciones que sean buenos compromisos (trade-offs) entre los diversos
objetivos fi más que una solución óptima.
La noción más adoptada es la propuesta por Francis
Ysidro Edgeworth (en 1881).
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
5 / 37
Optimización Evolutiva Multiobjetivos
El Problema de Optimización Multiobjetivo (MOP)
Noción de Óptimo en MOP
Esta noción fue generalizada por [Pareto, 1896] y es
conocida como Pareto-óptimo (Pareto Optimality)
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
6 / 37
Optimización Evolutiva Multiobjetivos
El Problema de Optimización Multiobjetivo (MOP)
Noción de Óptimo en MOP
Esta noción fue generalizada por [Pareto, 1896] y es
conocida como Pareto-óptimo (Pareto Optimality)
Un punto x∗ es Pareto-óptimo si no existe ningún otro punto x ∈ X
que sea mejor en un objetivo sin ser peor en al menos un otro.
Esta noción de Pareto-óptimo, se basa en la definición
de dominancia.
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
6 / 37
Optimización Evolutiva Multiobjetivos
El Problema de Optimización Multiobjetivo (MOP)
Dominancia
Sea F = {f1 (x), . . . , fk (x)} un conjunto de k funciones objetivo.
Sean las soluciones x1 , x2 ∈ X.
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
7 / 37
Optimización Evolutiva Multiobjetivos
El Problema de Optimización Multiobjetivo (MOP)
Dominancia
Sea F = {f1 (x), . . . , fk (x)} un conjunto de k funciones objetivo.
Sean las soluciones x1 , x2 ∈ X.
Se dice que x1 domina a x2 , (denotado por x1 ≺ x2 ), si existe una
función objetivo en la que x1 es mejor que x2 sin ser peor en los
demás objetivos, como se expresa en la ecuación 5 (para una
minimización).
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
7 / 37
Optimización Evolutiva Multiobjetivos
El Problema de Optimización Multiobjetivo (MOP)
Dominancia
Sea F = {f1 (x), . . . , fk (x)} un conjunto de k funciones objetivo.
Sean las soluciones x1 , x2 ∈ X.
Se dice que x1 domina a x2 , (denotado por x1 ≺ x2 ), si existe una
función objetivo en la que x1 es mejor que x2 sin ser peor en los
demás objetivos, como se expresa en la ecuación 5 (para una
minimización).
(
x1 ≺ x2 ⇔
Y. Túpac (UCSP, UNSA)
∀i = 1, . . . , k ⇒ ωi fi (x1 ) ≤ ωi fi (x2 )
∃j = 1, . . . , k : ωj fj (x1 ) < ωj fj (x2 )
XII CIIS Tacna 2011
23 de Noviembre de 2011
(5)
7 / 37
Optimización Evolutiva Multiobjetivos
El Problema de Optimización Multiobjetivo (MOP)
Dominancia
Sea F = {f1 (x), . . . , fk (x)} un conjunto de k funciones objetivo.
Sean las soluciones x1 , x2 ∈ X.
Se dice que x1 domina a x2 , (denotado por x1 ≺ x2 ), si existe una
función objetivo en la que x1 es mejor que x2 sin ser peor en los
demás objetivos, como se expresa en la ecuación 5 (para una
minimización).
(
x1 ≺ x2 ⇔
∀i = 1, . . . , k ⇒ ωi fi (x1 ) ≤ ωi fi (x2 )
∃j = 1, . . . , k : ωj fj (x1 ) < ωj fj (x2 )
(5)
donde ωi = 1 si es problema de minimización, ωi = −1, si es
problema de maximización
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
7 / 37
Optimización Evolutiva Multiobjetivos
El Problema de Optimización Multiobjetivo (MOP)
Pareto Optimality
Entonces, una solución x∗ ∈ X es Pareto-óptima, es decir que
pertenezca a un conjunto óptimo X∗ si no es dominada por ningún
elemento x ∈ X.
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
8 / 37
Optimización Evolutiva Multiobjetivos
El Problema de Optimización Multiobjetivo (MOP)
Pareto Optimality
Entonces, una solución x∗ ∈ X es Pareto-óptima, es decir que
pertenezca a un conjunto óptimo X∗ si no es dominada por ningún
elemento x ∈ X.
El conjunto X∗ se denomina Conjunto Pareto o Frontera de Pareto,
definido en 6
x∗ ∈ X∗ ⇔6 ∃x ∈ X : x ≺ x∗
(6)
.
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
8 / 37
Optimización Evolutiva Multiobjetivos
El Problema de Optimización Multiobjetivo (MOP)
Pareto Optimality
Entonces, una solución x∗ ∈ X es Pareto-óptima, es decir que
pertenezca a un conjunto óptimo X∗ si no es dominada por ningún
elemento x ∈ X.
El conjunto X∗ se denomina Conjunto Pareto o Frontera de Pareto,
definido en 6
x∗ ∈ X∗ ⇔6 ∃x ∈ X : x ≺ x∗
(6)
.
Es decir que (para minimización) no existe valor x ∈ X que disminuya
un objetivo sin aumentar en, al menos un otro.
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
8 / 37
Optimización Evolutiva Multiobjetivos
El Problema de Optimización Multiobjetivo (MOP)
Pareto Optimality
Entonces, una solución x∗ ∈ X es Pareto-óptima, es decir que
pertenezca a un conjunto óptimo X∗ si no es dominada por ningún
elemento x ∈ X.
El conjunto X∗ se denomina Conjunto Pareto o Frontera de Pareto,
definido en 6
x∗ ∈ X∗ ⇔6 ∃x ∈ X : x ≺ x∗
(6)
.
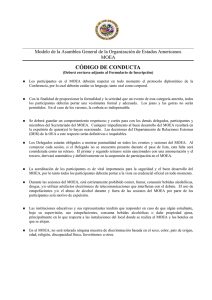
Es decir que (para minimización) no existe valor x ∈ X que disminuya
un objetivo sin aumentar en, al menos un otro.
Si se grafican las funciones pareto-óptimas, se obtiene el gráfico
Pareto front
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
8 / 37
Optimización Evolutiva Multiobjetivos
El Problema de Optimización Multiobjetivo (MOP)
Pareto Front
So
lu
f2 (x)
cio
ne
sp
ar
et
o–
óp
tim
as
Ni dominantes ni dominadas
Soluciones dominadas por x
(peores soluciones)
Y. Túpac (UCSP, UNSA)
Soluciones que dominan a x
(buenas soluciones)
Ni dominantes ni dominadas
XII CIIS Tacna 2011
f1 (x)
23 de Noviembre de 2011
9 / 37
Optimización Evolutiva Multiobjetivos
El Problema de Optimización Multiobjetivo (MOP)
Ejemplo de un problema MOP
Un productor desea minimizar costos de producción f1 y distribución f2
obteniendo las siguientes soluciones:
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
10 / 37
Optimización Evolutiva Multiobjetivos
El Problema de Optimización Multiobjetivo (MOP)
Ejemplo de un problema MOP
Un productor desea minimizar costos de producción f1 y distribución f2
obteniendo las siguientes soluciones:
A : f1 = 2, f2 = 10
f2
B : f1 = 4, f2 = 6
C : f1 = 8, f2 = 4
A(2, 10)
D : f1 = 9, f2 = 5
10
E : f1 = 7, f2 = 8
E(7, 8)
B(4, 6)
D(9, 5)
C(8, 4)
5
0
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
5
10
23 de Noviembre de 2011
f1
10 / 37
Optimización Evolutiva Multiobjetivos
El Problema de Optimización Multiobjetivo (MOP)
Ejemplo de un problema MOP
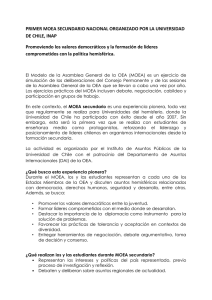
Un productor desea minimizar costos de producción f1 y distribución f2
obteniendo las siguientes soluciones:
A : f1 = 2, f2 = 10
f2
B : f1 = 4, f2 = 6
C : f1 = 8, f2 = 4
A(2, 10)
D : f1 = 9, f2 = 5
10
E : f1 = 7, f2 = 8
E(7, 8)
B(4, 6)
D(9, 5)
C(8, 4)
5
0
5
10
f1
Se observa que A, B, C son soluciones no dominadas, D, E
son dominadas por C , B: C ≺ D, B ≺ E.
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
10 / 37
Algoritmos Evolutivos Multiobjetivo – MOEA
Motivación
Algoritmos Evolutivos Multiobjetivo – MOEA
¿Por qué usar Algoritmos Evolutivos?
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
11 / 37
Algoritmos Evolutivos Multiobjetivo – MOEA
Motivación
Algoritmos Evolutivos Multiobjetivo – MOEA
¿Por qué usar Algoritmos Evolutivos?
Por su característica de búsqueda paralela (poblacional) que abre la
opción de encontrar varias soluciones del conjunto Pareto óptimo en
una ejecución.
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
11 / 37
Algoritmos Evolutivos Multiobjetivo – MOEA
Motivación
Algoritmos Evolutivos Multiobjetivo – MOEA
¿Por qué usar Algoritmos Evolutivos?
Por su característica de búsqueda paralela (poblacional) que abre la
opción de encontrar varias soluciones del conjunto Pareto óptimo en
una ejecución.
Pueden tratar problemas de forma o discontinuidad en la Pareto-Front
que no son posibles al emplear técnicas de programación matemática
clásicas [Coello, 1999]
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
11 / 37
Algoritmos Evolutivos Multiobjetivo – MOEA
Motivación
Algoritmos Evolutivos Multiobjetivo – MOEA
¿Por qué usar Algoritmos Evolutivos?
Por su característica de búsqueda paralela (poblacional) que abre la
opción de encontrar varias soluciones del conjunto Pareto óptimo en
una ejecución.
Pueden tratar problemas de forma o discontinuidad en la Pareto-Front
que no son posibles al emplear técnicas de programación matemática
clásicas [Coello, 1999]
Objetivo de un Algoritmo Evolutivo en problemas de MO:
Minimizar la distancia entre las soluciones generadas xi ∈ Xt y el
conjunto Pareto-óptimo X∗ .
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
11 / 37
Algoritmos Evolutivos Multiobjetivo – MOEA
Motivación
Algoritmos Evolutivos Multiobjetivo – MOEA
¿Por qué usar Algoritmos Evolutivos?
Por su característica de búsqueda paralela (poblacional) que abre la
opción de encontrar varias soluciones del conjunto Pareto óptimo en
una ejecución.
Pueden tratar problemas de forma o discontinuidad en la Pareto-Front
que no son posibles al emplear técnicas de programación matemática
clásicas [Coello, 1999]
Objetivo de un Algoritmo Evolutivo en problemas de MO:
Minimizar la distancia entre las soluciones generadas xi ∈ Xt y el
conjunto Pareto-óptimo X∗ .
La selección y operadores deben ser críticos en detectar y capturar
cualquier solución no dominada por los individuos de la población que
sea encontrada.
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
11 / 37
Algoritmos Evolutivos Multiobjetivo – MOEA
MOEA – 1a Generación
MOEA – 1a Generación
Sin uso del Criterio de Pareto
No emplean el conjunto Pareto X∗ , por lo que no garantizan la
obtención de la frontera de Pareto en su totalidad.
Son eficientes y fáciles de implementar, aunque limitadas para algunos
pocos objetivos
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
12 / 37
Algoritmos Evolutivos Multiobjetivo – MOEA
MOEA – 1a Generación
MOEA – 1a Generación
Sin uso del Criterio de Pareto
No emplean el conjunto Pareto X∗ , por lo que no garantizan la
obtención de la frontera de Pareto en su totalidad.
Son eficientes y fáciles de implementar, aunque limitadas para algunos
pocos objetivos
Algunos modelos sin uso del criterio de Pareto:
- Agregación de funciones.
- VEGA (Vector Evaluated Genetic Algorithm)
- Orden Lexicográfico
- Método −constraint.
- Vector Objetivo.
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
12 / 37
Algoritmos Evolutivos Multiobjetivo – MOEA
MOEA – 1a Generación
MOEA – 1a Generación
Agregación de Funciones
Consiste en combinar todas las funciones objetivo fi (x) en una función
única F (f1 (x), . . . , fk (x)).
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
13 / 37
Algoritmos Evolutivos Multiobjetivo – MOEA
MOEA – 1a Generación
MOEA – 1a Generación
Agregación de Funciones
Consiste en combinar todas las funciones objetivo fi (x) en una función
única F (f1 (x), . . . , fk (x)).
Agregación lineal de objetivos
La función más utilizada es la combinación lineal de los objetivos de la
ecuación 7
F=
k
X
ωi fi (x)
(7)
i=1
donde ωi son las importancias de cada función objetivo, siendo comun que
sean normalizadas, tal que:
k
X
ωi = 1
i=1
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
13 / 37
Algoritmos Evolutivos Multiobjetivo – MOEA
MOEA – 1a Generación
MOEA – 1a Generación
Agregación de Funciones
Ventajas:
Fácil de implementar
Eficientes
Desventajas:
No funcionan si la frontera de Pareto es cóncava
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
14 / 37
Algoritmos Evolutivos Multiobjetivo – MOEA
MOEA – 1a Generación
MOEA – 1a Generación
VEGA – Vector Evaluated Genetic Algorithm
Propuesta por [Schaffer, 1984], usa sub-poblaciones que optimizan
cada objetivo por separado
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
15 / 37
Algoritmos Evolutivos Multiobjetivo – MOEA
MOEA – 1a Generación
MOEA – 1a Generación
VEGA – Vector Evaluated Genetic Algorithm
Propuesta por [Schaffer, 1984], usa sub-poblaciones que optimizan
cada objetivo por separado
El concepto Pareto-óptimo es incorporado indirectamente en el
mecanismo de selección del AG
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
15 / 37
Algoritmos Evolutivos Multiobjetivo – MOEA
MOEA – 1a Generación
MOEA – 1a Generación
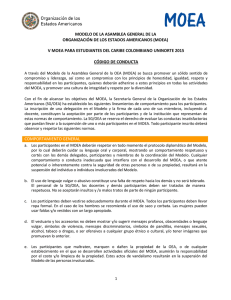
VEGA – Vector Evaluated Genetic Algorithm
Propuesta por [Schaffer, 1984], usa sub-poblaciones que optimizan
cada objetivo por separado
El concepto Pareto-óptimo es incorporado indirectamente en el
mecanismo de selección del AG
Ventajas y desventajas:
Eficiente y fácil de implementar
No hay un mecanismo explícito para mantener la diversidad.
No necesariamente producirá vectores no dominados
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
15 / 37
Algoritmos Evolutivos Multiobjetivo – MOEA
MOEA – 1a Generación
MOEA – 1a Generación
VEGA – Vector Evaluated Genetic Algorithm
Cromosoma xi
f1
f2
fj (xi)
...
Generación Xt+1
Generación Xt
x1
x1
1
seleccionar
k subgrupos
usando cada
objetivo
2
1
xm
Y. Túpac (UCSP, UNSA)
fk
barajar
operaciones
genéticas
2
3
k
xm
XII CIIS Tacna 2011
23 de Noviembre de 2011
16 / 37
Algoritmos Evolutivos Multiobjetivo – MOEA
MOEA – 1a Generación
MOEA – 1a Generación
Orden Lexicográfico
Se solicita al usuario un orden de importancia de los objetivos
La solución óptima se obtiene minimizando las funciones objetivo
comenzando por la más importante y siguiendo el orden dado
Se puede escoger al azar un objetivo para optimizar en cada ejecución
del AL
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
17 / 37
Algoritmos Evolutivos Multiobjetivo – MOEA
MOEA – 1a Generación
MOEA – 1a Generación
Orden Lexicográfico
Se solicita al usuario un orden de importancia de los objetivos
La solución óptima se obtiene minimizando las funciones objetivo
comenzando por la más importante y siguiendo el orden dado
Se puede escoger al azar un objetivo para optimizar en cada ejecución
del AL
Desventajas:
Exige un orden predefinido de los objetivos, su desempeño se puede
ver afectado por este orden.
No es adecuado si se trata de muchos objetivos
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
17 / 37
Algoritmos Evolutivos Multiobjetivo – MOEA
MOEA – 1a Generación
MOEA – 1a Generación
Método −constrain
Tiene como principio minimizar un objetivo preferido, considerando los
demás como restricciones cercadas por niveles i permitidos, de la
siguiente manera:
Se hace una única minimización para el objetivo más importante
sujeto a las restricciones dadas por los demás objetivos.
Los niveles i son alterados para poder obtener el conjunto
Pareto-óptimo entero.
Desventaja:
Puede requerir de un alto costo computacional
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
18 / 37
Algoritmos Evolutivos Multiobjetivo – MOEA
MOEA – 1a Generación
MOEA – 1a Generación
Vector Objetivo
Se define un conjunto de metas que se desea alcanzar para cada función
objetivo. El algoritmo minimizará la diferencia entre la solución y esas
metas.
También se pueden usar estrategias de agregación, por ejm min-max,
aunque pueden generarse partes cóncavas del Pareto-front
Ventajas y desventajas:
Facilidad de implementación
La definición de objetivos puede tener costo computacional extra.
Puede ocurrir desvío de la presión selectiva por la agregación de
objetivos.
Debe cumplirse que Objetivos ∈ X para garantizar soluciones en X∗
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
19 / 37
Algoritmos Evolutivos Multiobjetivo – MOEA
MOEA – 1a Generación
MOEA – 1a Generación
Usando el Criterio de Pareto
Esta idea surgió en [Goldberg, 1989] para atacar deficiencias en VEGA,
donde el principio de selección de individuos se basa ahora en el concepto
de Optimalidad de Pareto:
Se usa un ranking de elementos no dominados y selección para llevar
la población hacia la Pareto Front
Es necesario un procedimiento de ranking y una técnica que mantenga
la diversidad de la población; esto es para evitar la convergencia a una
única solución x∗ debido al ruido estocástico del proceso
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
20 / 37
Algoritmos Evolutivos Multiobjetivo – MOEA
MOEA – 1a Generación
MOEA – 1a Generación
Usando el Criterio de Pareto
Los métodos más conocidos de la primera generación usando criterio de
Pareto son los siguientes:
Ranking Pareto puro
Multi-Objective Genetic Algorithm (MOGA)
Nondominated Sorting Genetic Algorithm (NSGA)
Niched-Pareto Genetig Algorithm (NPGA)
Niched-Pareto Genetig Algorithm 2 NPGA 2
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
21 / 37
Algoritmos Evolutivos Multiobjetivo – MOEA
MOEA – 1a Generación
MOEA – 1a Generación
Ranking Pareto Puro
Es la idea original de Goldberg [Goldberg, 1989]
La complejidad computacional es O(kM 2 ) dada por la necesidad de
revisar la no dominancia, donde:
k es la cantidad de objetivos
M es el tamaño de la población
La complejidad del cálculo de la evaluación es O(M 2 )
Es poco susceptible a la forma y continuidad del Pareto front
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
22 / 37
Algoritmos Evolutivos Multiobjetivo – MOEA
MOEA – 1a Generación
MOEA – 1a Generación
MOGA –Multi-objective Genetic Algorithm
Se hace ranking de un individuos por el número de individuos que lo
dominan [Goldberg, 1989]
Complejidad computacional O(kM 2 ) dada por la necesidad de revisar
la no dominancia, donde:
k es la cantidad de objetivos
M es el tamaño de la población
Se emplea fitness compartido y restricciones para los cruces. forma y
continuidad del Pareto front
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
23 / 37
Algoritmos Evolutivos Multiobjetivo – MOEA
MOEA – 1a Generación
MOEA – 1a Generación
MOGA –Multi-objective Genetic Algorithm
Se hace ranking de un individuos por el número de individuos que lo
dominan [Goldberg, 1989]
Complejidad computacional O(kM 2 ) dada por la necesidad de revisar
la no dominancia, donde:
k es la cantidad de objetivos
M es el tamaño de la población
Se emplea fitness compartido y restricciones para los cruces. forma y
continuidad del Pareto front
Ventajas, desventajas:
El desempeño depende de una buena selección y el factor de
compartición
Fue el primer algoritmo GA MO verdadero, superó a sus competidores
contemporáneos.
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
23 / 37
Algoritmos Evolutivos Multiobjetivo – MOEA
MOEA – 1a Generación
MOEA – 1a Generación
NSGA –Non-dominated Sorting Genetic Algorithm
Propuesto por [Srinivas and Deb, 1994], ordenan por su calidad de no
dominados colocando los no dominados en una lista y dándoles una
aptitud fantasma de acuerdo al tamaño m de la población.
Para mantener la diversidad, los individuos no dominados comparten
sus aptitudes, se ignoran y se genera otra lista de individuos no
dominados y se continua hasta lograr clasificar toda la población X
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
24 / 37
Algoritmos Evolutivos Multiobjetivo – MOEA
MOEA – 1a Generación
MOEA – 1a Generación
NSGA –Non-dominated Sorting Genetic Algorithm
Propuesto por [Srinivas and Deb, 1994], ordenan por su calidad de no
dominados colocando los no dominados en una lista y dándoles una
aptitud fantasma de acuerdo al tamaño m de la población.
Para mantener la diversidad, los individuos no dominados comparten
sus aptitudes, se ignoran y se genera otra lista de individuos no
dominados y se continua hasta lograr clasificar toda la población X
Selección mediante sobrante estocástico
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
24 / 37
Algoritmos Evolutivos Multiobjetivo – MOEA
MOEA – 1a Generación
MOEA – 1a Generación
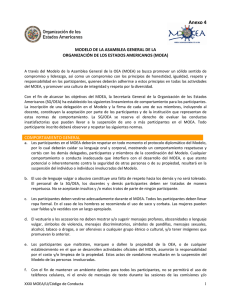
NSGA –Non-dominated Sorting Genetic Algorithm – Diagrama de flujo
inicializa población
gen = 0
INICIO
front = 1
reproducción sigue las
reglas de aptitud?
si
¿población
clasificada?
mutación
cruce
no
gen +=1
gen < maxgen
no
Identificar
individuos
no dominados
asignar aptitud
fantasma
compartir fitness
en front actual
si
front+=1
FIN
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
25 / 37
Algoritmos Evolutivos Multiobjetivo – MOEA
MOEA – 1a Generación
MOEA – 1a Generación
NPGA –Niched-Pareto Genetic Algorithm
Uso de selección por torneo basada en la dominancia
Dos individuos aleatorios se comparan con un subconjunto de la
población (10% típico).
Si los dos elementos son dominados o no dominados (empate) el
torneo se decide por el fitness compartido en el dominio del objetivo,
usando la técnica llamada clase equivalente compartida
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
26 / 37
Algoritmos Evolutivos Multiobjetivo – MOEA
MOEA – 1a Generación
MOEA – 1a Generación
NPGA –Niched-Pareto Genetic Algorithm
Uso de selección por torneo basada en la dominancia
Dos individuos aleatorios se comparan con un subconjunto de la
población (10% típico).
Si los dos elementos son dominados o no dominados (empate) el
torneo se decide por el fitness compartido en el dominio del objetivo,
usando la técnica llamada clase equivalente compartida
Ventajas y desventajas:
No aplica el ranking Pareto a la población entera (eficiencia).
Se requiere un parámetro adicional (tamaño del torneo) dado el factor
de compartición
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
26 / 37
Algoritmos Evolutivos Multiobjetivo – MOEA
MOEA – 1a Generación
MOEA – 1a Generación
NPGA2
Uso de Ranking Pareto manteniendo la selección por torneo (similar al
NPGA)
En este algoritmo se usan individuos de la próxima generación
(población parcialmente completada). Esta técnica se conoce como
actualización de fitness continua.
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
27 / 37
Algoritmos Evolutivos Multiobjetivo – MOEA
MOEA – 2a Generación
MOEA – 2a Generación
Características
Se enfatiza la eficiencia.
Se usan poblaciones secundarias (o externas) para generar soluciones
que sean no dominadas y uniformemente distribuidas.
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
28 / 37
Algoritmos Evolutivos Multiobjetivo – MOEA
MOEA – 2a Generación
MOEA – 2a Generación
Características
Se enfatiza la eficiencia.
Se usan poblaciones secundarias (o externas) para generar soluciones
que sean no dominadas y uniformemente distribuidas.
Desafíos:
Los problemas que se tratan son:
El fitness compartido, con complejidad O(M 2 )
Verificación de la dominancia de Pareto con complejidad O(kM 2 ) por
generación.
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
28 / 37
Algoritmos Evolutivos Multiobjetivo – MOEA
MOEA – 2a Generación
MOEA – 2a Generación
PESA –Pareto Envelope-based Selection Algorithm
Usa una población interna pequeña y una gran población externa.
Emplea una división del hyper-grid del fenotipo (o sea la función
objetivo) para mantener la diversidad
La selección se basa en una medida de agrupamiento de los grids.
Con esta medida se decide cuál solución se colocará en la población
externa que almacenará las soluciones no dominadas encontradas a lo
largo del proceso.
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
29 / 37
Algoritmos Evolutivos Multiobjetivo – MOEA
MOEA – 2a Generación
MOEA – 2a Generación
PESA –Pareto Envelope-based Selection Algorithm
Usa una población interna pequeña y una gran población externa.
Emplea una división del hyper-grid del fenotipo (o sea la función
objetivo) para mantener la diversidad
La selección se basa en una medida de agrupamiento de los grids.
Con esta medida se decide cuál solución se colocará en la población
externa que almacenará las soluciones no dominadas encontradas a lo
largo del proceso.
Hay una revisión llamada PESA-II que usa selección basada en hiperboxes
en vez de individuos
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
29 / 37
Algoritmos Evolutivos Multiobjetivo – MOEA
MOEA – 2a Generación
MOEA – 2a Generación
SPEA–Streng Pareto Evolutionary Algorithm
Usa un archivo con soluciones no dominadas previamente encontradas
Se calcula un valor de ranking de individuos similar a MOGA
Usa average linkage method para clusterizar y mantener la diversidad.
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
30 / 37
Algoritmos Evolutivos Multiobjetivo – MOEA
MOEA – 2a Generación
MOEA – 2a Generación
SPEA-II – Streng Pareto Evolutionary Algorithm 2
Con tres diferencias básicas con la versión anterior:
Incorpora una estrategia de asignación fine-grained que, para un
individuo x toma en cuenta la cantidad de individuos que domina y
que lo dominan.
Emplea una técnica de estimación de densidad de vecinos más
próximos para dirigir mejor la búsqueda.
Posée un método mejorado de truncado para garantizar la
preservación de las soluciones en la frontera.
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
31 / 37
Algoritmos Evolutivos Multiobjetivo – MOEA
MOEA – 2a Generación
MOEA – Investigación en abierto
Fundamentos teóricos
El área que requiere de más investigación en MOEA es la fundamentación
teórica.
La mayor parte de la investigación actual se concentra en demostrar que
hay convergencia en la Optimización Multiobjetivo por Algoritmos
Evolutivos.
Además de esta línea principal, hay algunas otras que aún se encuentran
en discusion, tales como:
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
32 / 37
Algoritmos Evolutivos Multiobjetivo – MOEA
MOEA – 2a Generación
MOEA – Investigación en abierto
Fundamentos teóricos
El área que requiere de más investigación en MOEA es la fundamentación
teórica.
La mayor parte de la investigación actual se concentra en demostrar que
hay convergencia en la Optimización Multiobjetivo por Algoritmos
Evolutivos.
Además de esta línea principal, hay algunas otras que aún se encuentran
en discusion, tales como:
Estudiar la estructura de las hipersuperficies de aptitud para los
problemas de Optimizacion Multiobjetivo.
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
32 / 37
Algoritmos Evolutivos Multiobjetivo – MOEA
MOEA – 2a Generación
MOEA – Investigación en abierto
Fundamentos teóricos
El área que requiere de más investigación en MOEA es la fundamentación
teórica.
La mayor parte de la investigación actual se concentra en demostrar que
hay convergencia en la Optimización Multiobjetivo por Algoritmos
Evolutivos.
Además de esta línea principal, hay algunas otras que aún se encuentran
en discusion, tales como:
Estudiar la estructura de las hipersuperficies de aptitud para los
problemas de Optimizacion Multiobjetivo.
Responder a la pregunta fundamentental: ¿Cuál es la dificultad en la
optimización multiobjetivos para un algoritmo evolutivo?
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
32 / 37
Algoritmos Evolutivos Multiobjetivo – MOEA
MOEA – 2a Generación
MOEA – Investigación en abierto
Fundamentos teóricos
El área que requiere de más investigación en MOEA es la fundamentación
teórica.
La mayor parte de la investigación actual se concentra en demostrar que
hay convergencia en la Optimización Multiobjetivo por Algoritmos
Evolutivos.
Además de esta línea principal, hay algunas otras que aún se encuentran
en discusion, tales como:
Estudiar la estructura de las hipersuperficies de aptitud para los
problemas de Optimizacion Multiobjetivo.
Responder a la pregunta fundamentental: ¿Cuál es la dificultad en la
optimización multiobjetivos para un algoritmo evolutivo?
Un desarrollo formal para analizar y demostrar la convergencia en
Algoritmos Evolutivos multiobjetivo paralelos.
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
32 / 37
Algoritmos Evolutivos Multiobjetivo – MOEA
MOEA – 2a Generación
MOEA – Investigación en abierto
Fundamentos teóricos
El área que requiere de más investigación en MOEA es la fundamentación
teórica.
La mayor parte de la investigación actual se concentra en demostrar que
hay convergencia en la Optimización Multiobjetivo por Algoritmos
Evolutivos.
Además de esta línea principal, hay algunas otras que aún se encuentran
en discusion, tales como:
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
33 / 37
Algoritmos Evolutivos Multiobjetivo – MOEA
MOEA – 2a Generación
MOEA – Investigación en abierto
Fundamentos teóricos
El área que requiere de más investigación en MOEA es la fundamentación
teórica.
La mayor parte de la investigación actual se concentra en demostrar que
hay convergencia en la Optimización Multiobjetivo por Algoritmos
Evolutivos.
Además de esta línea principal, hay algunas otras que aún se encuentran
en discusion, tales como:
Buscar el límite teórico para el ranking de Pareto asumiendo
poblaciones de tamaño finito.
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
33 / 37
Algoritmos Evolutivos Multiobjetivo – MOEA
MOEA – 2a Generación
MOEA – Investigación en abierto
Fundamentos teóricos
El área que requiere de más investigación en MOEA es la fundamentación
teórica.
La mayor parte de la investigación actual se concentra en demostrar que
hay convergencia en la Optimización Multiobjetivo por Algoritmos
Evolutivos.
Además de esta línea principal, hay algunas otras que aún se encuentran
en discusion, tales como:
Buscar el límite teórico para el ranking de Pareto asumiendo
poblaciones de tamaño finito.
Hacer un análisis en tiempo real del rendimiento de un Algoritmo
Evolutivo Multiobjetivo.
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
33 / 37
Algoritmos Evolutivos Multiobjetivo – MOEA
MOEA – 2a Generación
MOEA – Investigación en abierto
Fundamentos teóricos
El área que requiere de más investigación en MOEA es la fundamentación
teórica.
La mayor parte de la investigación actual se concentra en demostrar que
hay convergencia en la Optimización Multiobjetivo por Algoritmos
Evolutivos.
Además de esta línea principal, hay algunas otras que aún se encuentran
en discusion, tales como:
Buscar el límite teórico para el ranking de Pareto asumiendo
poblaciones de tamaño finito.
Hacer un análisis en tiempo real del rendimiento de un Algoritmo
Evolutivo Multiobjetivo.
Tener definiciones aceptadas por la comunidad sobre robustez,
convergencia y diversidad, entre otras en el contexto de optimización
evolutiva multiobjetivo.
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
33 / 37
Algoritmos Evolutivos Multiobjetivo – MOEA
MOEA – 2a Generación
MOEA – Líneas de Investigación Futuras
Incorporar preferencias
Muchas de las actuales técnicas usadas en en la Toma de Decisiones
Multicriterio que se desarrolla en el área de Investigación Operativa,
aún no son bien aplicadas en Optimización Evolutiva Multiobjetivo.
Esta incorporación es muy importante para aplicaciones reales ya que
el usuario en realidad sólo necesitará una sola solución Óptima-Pareto
en vez del conjunto entero como se asume en ALgoritmos Evolutivos
Multiobjetivo.
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
34 / 37
Algoritmos Evolutivos Multiobjetivo – MOEA
MOEA – 2a Generación
MOEA – Líneas de Investigación Futuras
Incorporar preferencias
Muchas de las actuales técnicas usadas en en la Toma de Decisiones
Multicriterio que se desarrolla en el área de Investigación Operativa,
aún no son bien aplicadas en Optimización Evolutiva Multiobjetivo.
Esta incorporación es muy importante para aplicaciones reales ya que
el usuario en realidad sólo necesitará una sola solución Óptima-Pareto
en vez del conjunto entero como se asume en ALgoritmos Evolutivos
Multiobjetivo.
Optimización de funciones dinámicas
Es el siguiente paso, luego de atacar funciones estátivas con varios
objetivos. En este caso, las fronteras de Pareto se mueven en el
tiempo debido a la existencia de variables aleatorias o dinámicas.
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
34 / 37
Algoritmos Evolutivos Multiobjetivo – MOEA
MOEA – 2a Generación
MOEA – Líneas de Investigación Futuras
Espacios de búsqueda restringidos
En la literatura, se encuentran algunas investigaciones tratando la
solución de problemas multiobjetivo con espacios de búsqueda
altamente restringidos. Estos problemas son bastante comunes y
hacen necesario desarrollar técnicas nuevas para manejo de
restricciones que puedan lidiar con este tipo de problemas.
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
35 / 37
Algoritmos Evolutivos Multiobjetivo – MOEA
MOEA – 2a Generación
MOEA – Líneas de Investigación Futuras
Espacios de búsqueda restringidos
En la literatura, se encuentran algunas investigaciones tratando la
solución de problemas multiobjetivo con espacios de búsqueda
altamente restringidos. Estos problemas son bastante comunes y
hacen necesario desarrollar técnicas nuevas para manejo de
restricciones que puedan lidiar con este tipo de problemas.
Paralelismo
Se espera más investigación en MOEA. Es necesario tener más
algoritmos y también modelos formales que comprueben la
convergencia y claro, más aplicaciones reales que usen paralelismo.
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
35 / 37
Bibliografía
Bibliografía I
Coello, C. A. (1999).
A comprehensive survey of evolutionary-based multiobjective
optimizations techniques.
Knowledge and Information Systems. An International Journal,
1(3):269–308.
Goldberg, D. E. (1989).
Genetic Algorithms in Search, Optimization and Machine Learning.
Addison-Wesley Publishing Co., Reading, Massachusetts.
Pareto, V. F. (1896).
Cours d’Économie Politique, volume 1.
F. Rouge, Lausanne, Paris, France.
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
36 / 37
Bibliografía
Bibliografía II
Schaffer, J. D. (1984).
Multiple Objective Optimization with Vector Evaluated Genetic
Algorithms.
PhD thesis, Vanderbilt University, Nashville, TN.
Srinivas, N. and Deb, K. (1994).
Multiobjective optimization using nondominated sorting in genetic
algorithms.
Evolutionary Computation, 2(3):221–248.
Y. Túpac (UCSP, UNSA)
XII CIIS Tacna 2011
23 de Noviembre de 2011
37 / 37