Optimización del perfil de rodadura de una rueda de ferrocarril
Anuncio

Asociación Española de
Ingeniería Mecánica
XVIII CONGRESO NACIONAL
DE INGENIERÍA MECÁNICA
Optimización del perfil de rodadura de una rueda de ferrocarril
considerando su conicidad equivalente
J. Santamaría, J. Herreros, O. Oyarzabal, E.G. Vadillo
Dpto. Ingeniería Mecánica. Universidad del País Vasco UPV/EHU
javier.santamaria@ehu.es
Resumen
Este trabajo presenta una metodología de síntesis óptima de perfiles de rueda de ferrocarril tomando como
función objetivo una curva de conicidad equivalente ideal. La optimización se lleva a cabo utilizando de manera
complementaria algoritmos genéticos y métodos de optimización tradicionales, con el fin de aproximarse lo
máximo posible a la curva de referencia. Como es sabido, la geometría del contacto rueda-carril influye de
manera determinante en el comportamiento dinámico del vehículo, en los esfuerzos que éste va a transmitir a la
vía, en el desgaste que se produce tanto en la rueda como en las cabezas de los carriles, y en parámetros
fundamentales de cara a la seguridad como el riesgo de descarrilamiento y la estabilidad. Por otro lado, se sabe
que muy pequeñas variaciones en la geometría y disposición del perfil de rueda o del carril, pueden producir
diferencias significativas en las funciones representativas del problema geométrico del contacto. Estas
diferencias en las funciones del contacto conducen a un comportamiento dinámico final del vehículo muy
diferente al inicial. La alta sensibilidad que tienen las curvas de contacto a estos pequeños cambios en los
perfiles de rodadura, hacen que la optimización por medios tradicionales sea muy problemática en estos casos.
La utilización de algoritmos genéticos evita la obtención reiterada de mínimos relativos que apenas mejoran el
comportamiento inicial de la rueda, y se convierten en un método muy adecuado en este tipo de problemas.
Finalmente, se aplica un método de optimización tradicional para mejorar sensiblemente el resultado obtenido
con el procedimiento anterior. El perfil de rueda se define mediante tramos rectos y circulares, que constituyen
las variables del problema de optimización. Por lo que respecta a la curva de conicidad equivalente objetivo, se
construye de tal forma que sea constante y de bajo valor para desplazamientos laterales pequeños del eje (de
cara a la estabilidad), y creciente a medida que estos desplazamientos se incrementan. Como resultado se
obtiene un perfil de rueda con una conicidad más próxima a la ideal, que se traduce en una mejor inscripción en
curva manteniendo la estabilidad en vía recta.
INTRODUCCIÓN
La geometría del contacto rueda-carril constituye un elemento clave en la resolución de la dinámica de un
vehículo ferroviario. Es bien sabido que la forma con la que se diseña tanto el perfil de la rueda en la zona de
rodadura así como la cabeza del carril condiciona fuertemente la respuesta del vehículo desde el punto de vista
de diversos factores, como son la estabilidad, ausencia de vibraciones, la capacidad de inscripción en curva, el
desgaste de ruedas y carriles y la seguridad de rodadura entre otros [1-2]. Es por ello que surge la necesidad de
obtener unos perfiles lo más idóneos en la medida de lo posible para las condiciones de circulación previstas. De
este modo se consigue una respuesta dinámica mejorada, aumentando por ejemplo la estabilidad del vehículo, o
bien reduciendo el desgaste de los perfiles y las fuerzas transmitidas a la vía en tramos curvos.
Tradicionalmente los perfiles de rueda se han obtenido en base a la experiencia e intuición del diseñador,
teniendo en cuenta el tipo de carril sobre el que iban a entrar en contacto, así como las características del
vehículo y de la vía. No es una tarea sencilla ya que la sensibilidad de la dinámica del vehículo a la geometría de
los perfiles es muy alta, y un mismo perfil de rueda puede mostrar un buen comportamiento para un vehículo o
vía determinada, y sin embargo ofrecer una mala respuesta cuando se cambia alguna condición de circulación.
Existe además otro factor que hace particularmente complicado el proceso de obtención de un perfil optimizado:
J. Santamaría et al. / XVIII Congreso Nacional de Ingeniería Mecánica (2010)
2
el desgaste inevitable que se producirá sobre el propio perfil como consecuencia de la rodadura en los primeros
miles de kilómetros de circulación. El desgaste no sólo es perjudicial desde el punto de vista económico (se
elimina material y es necesario retornear o sustituir periódicamente las ruedas, por lo que siempre se trata de
minimizar ese desgaste en todos los casos); también hace cambiar la forma del perfil inicialmente obtenido [3].
Esto conduce en mayor o menor medida a la pérdida de las características dinámicas del contacto rueda-carril
que se han tratado de implantar en la fase de diseño inicial del perfil. Si el desgaste de la rueda se produce
rápidamente, el perfil obtenido en la fase de diseño y que ofrecía buenas prestaciones sólo podrá aprovecharse un
corto periodo de tiempo, por lo que en realidad no será un buen diseño.
La metodología que trate de optimizar los perfiles de rodadura en dinámica ferroviaria debe tener en cuenta por
tanto, aparte de otros parámetros, la reducción del desgaste del perfil. Este trabajo presenta una metodología de
síntesis de perfiles de rueda optimizados para unas condiciones de circulación específicas: vía de alta velocidad
española, con ancho UIC, carril 60 E 1 (UIC-60) e inclinación de carril 1:20. A diferencia de los métodos
tradicionales, la optimización se lleva a cabo minimizando una función objetivo utilizando Algoritmos Genéticos
(AG) complementados con métodos tradicionales de optimización. Debido a la alta sensibilidad del problema a
la forma de los perfiles de rodadura, los métodos tradicionales de optimización por sí solos no ofrecen buenos
resultados, conduciendo frecuentemente a mínimos relativos que pueden estar muy lejos de la solución óptima.
La función objetivo escogida es una curva de conicidad ideal, que refleje un buen comportamiento del vehículo
tanto en recta como en curva, un desgaste pequeño y una geometría realista del perfil. En los siguientes
apartados de este trabajo se explica la selección de dicha curva objetivo, la metodología de optimización, y las
mejoras conseguidas con el nuevo perfil de rueda obtenido. Para estos últimos análisis comparativos se han
llevado a cabo simulaciones dinámicas de un vehículo tipo con ambos perfiles de rueda, estudiando los niveles
de desgaste en curvas de diferentes radios.
ESTUDIO DEL PERFIL DE RUEDA PARA ALTA VELOCIDAD
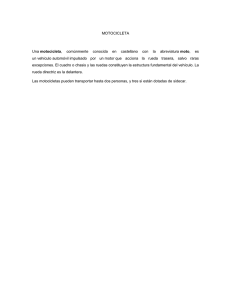
La Fig. (1) muestra uno de los perfiles de rueda utilizados en alta velocidad. Como la estabilidad del vehículo es
tan importante en estos casos, y dado que la velocidad crítica disminuye con la conicidad de la rueda, es
necesario que el perfil ofrezca una baja conicidad equivalente para un amplio rango de desplazamientos laterales
del eje. Como se puede ver en la figura, la banda de rodadura está formada por una recta de pendiente 2.5% que
se extiende hasta zonas próximas a la transición a la pestaña. Esto conduce a que el punto de contacto con el
carril se mantenga en esta recta para amplios recorridos laterales del eje, y que la conicidad equivalente sea
constante y pequeña (coincidente con la pendiente de la recta) en ese rango. Todo esto es muy beneficioso de
cara a la estabilidad del vehículo, en contraposición con otros perfiles donde el tramo recto de la banda de
rodadura empieza a curvarse bastante antes de aproximarse a la pestaña de la rueda.
20
Tramo rectilíneo
banda de rodadura
10
Tramos circulares
z (mm)
0
2.5 %
-10
Tramo rectilíneo
pestaña 70º
-20
-30
-40
-60
-40
-20
0
20
40
60
y (mm)
Fig. 1. Perfil de rueda utilizado en alta velocidad.
En el caso de la rueda mostrada en la Fig. (1), también se puede comprobar que el perfil está formado por la
concatenación de sucesivos tramos rectos y arcos de circunferencia. Concretamente, en la zona activa de
contacto, el perfil se constituye con un tramo recto en la banda de rodadura, dos tramos circulares, y un tramo
recto correspondiente a la pestaña.
Optimización del perfil de rodadura de una rueda de ferrocarril considerando su conicidad equivalente
3
La contrapartida de este diseño de rueda, de gran estabilidad, aparece en los tramos curvos de la vía. Para la
correcta inscripción del vehículo ferroviario en una curva, se necesita una determinada diferencia de radios de
rodadura entre las dos ruedas del eje montado. Al girar ambas ruedas con la misma velocidad angular, la rueda
exterior debe tener un radio de rodadura mayor para que de este modo su velocidad de avance sea mayor que la
interior. Cuanto más cerrada sea la curva, mayor será la diferencia de radios necesaria. La diferencia de radios de
rodaduraR entre la rueda izquierda ri y la rueda derecha rd aparece gracias a la conicidad de las ruedas, y esta
diferencia se va incrementando a medida que el eje se desplaza lateralmente. Constituye un parámetro
fundamental que determina la capacidad del eje de inscribirse en una curva sin grandes deslizamientos. Si en un
tramo curvo, el perfil de rueda no es lo suficientemente cónico como para conseguir el valor de R necesario, el
eje se desplazará lateralmente hasta que la pestaña de la rueda choque con la cabeza del carril. En esta situación,
el punto de contacto se localiza sobre la pestaña de la rueda, produciéndose grandes deslizamientos y riesgo de
descarrilamiento. Para la correcta inscripción del vehículo en curva, interesa conseguir el valor de R necesario
antes de que la pestaña contacte con el carril.
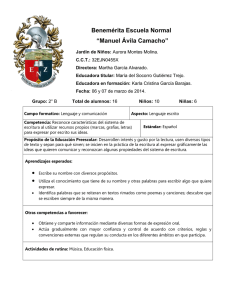
La Fig. (2) representa la función R en función del desplazamientos lateral y para el caso de la rueda de la Fig.
(1). Como se puede ver, este valor crece muy lentamente y prácticamente de manera constante para un gran
rango de desplazamientos laterales del eje. No es hasta que la pestaña de la rueda contacta con el carril
(aproximadamente para un valor de y = 6.6 mm) cuando el valor de R crece de manera súbita. Todo esto indica
que el eje va a sufrir grandes desplazamientos laterales cuando se inscriba en tramos curvos, y que la pestaña de
la rueda impactará contra el carril para la mayoría de los radios de curva, a excepción las curvas muy abiertas.
20
15
ri - rd (mm)
10
5
0
-5
-10
-15
-20
-6
-4
-2
0
2
4
6
y (mm)
Fig. 2. Función R obtenida con el perfil de rueda de la Fig. (1).
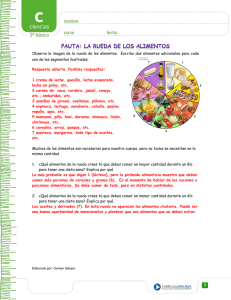
En la Fig. (3) se ha representado dónde se sitúan los puntos de contacto sobre el perfil de rueda y de carril, para
distintas posiciones laterales del eje montado sobre la vía. En este trabajo se ha considerado siempre un ángulo
de ataque nulo para todas las gráficas, teniendo en cuenta que en alta velocidad este ángulo es siempre muy
pequeño y su influencia en los parámetros geométricos del contacto despreciable. En el diagrama de la Fig. (3)
se puede comprobar claramente lo que se intuye a la vista de la curva de la Fig. (2). El punto de contacto se sitúa
sobre la banda de rodadura en una zona pequeña del perfil, para un amplio rango de desplazamientos laterales,
hasta que el desplazamiento lateral del eje agota el juego existente y el punto de contacto salta bruscamente a la
pestaña de la rueda. Se representa en color rojo los puntos de contacto correspondientes a desplazamientos
laterales del eje inferiores a 4 mm.
La gran distancia que hay entre el punto de contacto en la pestaña y los anteriores es perjudicial desde el punto
de vista dinámico. Cuando la pestaña de la rueda contacte con el carril, se producirá una situación de doble punto
de contacto en la que una zona de contacto se situará sobre la banda de rodadura y otra sobre la pestaña, y muy
alejadas entre sí. Esto conlleva un gran desgaste en el punto de contacto con la pestaña así como otros efectos
perjudiciales. Además, esta situación se producirá a partir de radios de curva no muy pequeños, ya que la baja
conicidad del perfil no es capaz de generar un valor de R que evite el contacto de la pestaña de la rueda.
A la vista de estos resultados, se concluye que el perfil de rueda nominal utilizado en alta velocidad ofrece una
estabilidad excelente, a costa de una pobre respuesta en tramos curvos. Por otro lado, el hecho de que la zona de
contacto se reduzca a una pequeña franja sobre el perfil de la rueda originará un desgaste no uniforme, que hará
J. Santamaría et al. / XVIII Congreso Nacional de Ingeniería Mecánica (2010)
4
que la forma de la rueda cambie rápidamente y que las características dinámicas del perfil nominal no se
mantengan en el tiempo. El objetivo de este trabajo consiste en investigar las posibilidades de obtener un perfil
de rueda que, manteniendo siempre una gran estabilidad, consiga incrementar el valor de la función R para
mejorar el comportamiento en tramos curvos.
30
-4
20
4
z (mm)
10
7.2
0
-10
-20
-30
-40
-50
0
50
y (mm)
Fig. 3. Distribución de los puntos de contacto sobre los perfiles actuales (rueda izquierda).
DEFINICIÓN DE LA FUNCIÓN OBJETIVO A MINIMIZAR
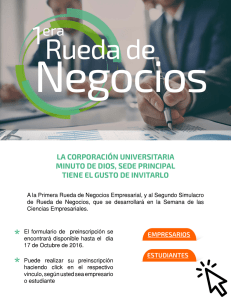
La Fig. (4) muestra la conicidad equivalente del perfil de rueda representado en la Fig. (1) en función del
desplazamiento lateral del eje. La conicidad equivalente se puede calcular con la Ec. (1), siendo y el
desplazamiento lateral del eje.
( y)
ri rd
2y
(1)
En la Fig. (4) se pueden constatar todas las características expuestas en el apartado anterior: la rueda tiene una
conicidad equivalente muy baja y constante para un gran rango de desplazamientos laterales del eje, y sufre un
incremento brusco casi en la zona de la pestaña. Por tanto, la estabilidad será muy alta, pero apenas se consigue
un valor significativo de R hasta alcanzar la pestaña.
1
Conicidad
0.8
0.6
0.4
0.2
0
0
1
2
3
4
5
6
7
y (mm)
Fig. 4. Conicidad equivalente de los perfiles para alta velocidad.
8
Optimización del perfil de rodadura de una rueda de ferrocarril considerando su conicidad equivalente
5
La función objetivo que se plantea en este trabajo es una curva de conicidad equivalente óptima. A diferencia de
otros trabajos donde la curva de referencia se corresponde con la curva de diferencia de radios de rodadura R
[4], la curva de conicidad proporciona en alta velocidad información más útil de cara a la estabilidad, ya que
permite acotar los valores de conicidad equivalente admisibles para pequeños desplazamientos laterales del eje.
Por otro lado, la forma de la curva también permite deducir si el perfil producirá valores de R mayores de cara a
la inscripción en curva.
La curva de conicidad que se plantea como óptima para el caso analizado se presenta en la Fig. (5). La curva
mantiene un valor constante de valor = 0.025 hasta y = 4 mm. Esta conicidad se corresponde con la inclinación
de la banda de rodadura de la rueda original, y asegura una buena estabilidad del vehículo. A partir de 4 mm se
plantea una conicidad creciente (para incrementar el valor de R), pero de forma suave. La suavidad de la curva
se reflejará en un desplazamiento lateral progresivo del eje al paso por curva, un movimiento suave del punto de
contacto sobre el perfil de rueda, una minimización de situaciones de doble punto de contacto, y un incremento
de la estabilidad del vehículo. Finalmente, se hace terminar la curva objetivo en el mismo punto que la curva
original, dado que ese valor corresponde ya a un punto de contacto situado en la pestaña de la rueda (ver Fig.
(3)). Como se verá en un apartado posterior, la pestaña de la rueda permanece inalterable durante la
optimización, por lo que este valor último de la conicidad de la rueda optimizada coincidirá casi completamente
con el de la rueda original.
Contacto en pestaña
1
Conicidad
0.8
0.6
Zona de penalización
decreciente
0.4
0.2
0
0
1
2
3
4
5
6
7
8
y (mm)
Fig. 5. Conicidad equivalente objetivo.
A pesar de que para el cómputo de la conicidad equivalente representativa de una rueda se suele utilizar un valor
de y = 3 mm (tal como se indica en la ficha UIC 518 [5]), en este trabajo se impone una conicidad baja hasta 4
mm para asegurar que la estabilidad de la rueda optimizada sea prácticamente la misma que la de la rueda
original. Se asume que las mejoras respecto a la inscripción en curva se producirán para desplazamientos del eje
mayores que 4 mm, incrementando la curva de conicidad a partir de ese punto.
El cálculo de la función objetivo se realiza comparando la curva de conicidad óptima de la Fig. (5) con la curva
de conicidad real de la rueda analizada, en base a mínimos cuadrados. El valor de la función objetivo f resulta de
la suma ponderada de las diferencias de cotas al cuadrado entre las dos curvas tal como muestra la Ec. (2), donde
obj(yi) y calc(yi) son las conicidades objetivo y real respectivamente para un desplazamiento lateral yi, y p(yi) un
coeficiente de penalización variable con y. Para el cálculo f se han considerado desplazamientos laterales yi cada
0.2 mm hasta llegar a la pestaña, con lo que m = 36.
m
f obj ( yi ) calc ( yi ) p ( yi )
i 1
2
(2)
En este tipo de optimización es imprescindible corregir la suma de diferencias cuadráticas con un factor de
ponderación p(y). Esto es debido a que determinadas curvas de conicidad que se aproximan bien a la curva de
referencia no representan buenos perfiles de rueda. Es el caso por ejemplo de una curva que se ajuste muy bien a
la de referencia para y > 3 mm, pero sus valores de conicidad sean moderadamente altos para desplazamientos
menores. A pesar de que el valor de la suma de diferencias cuadráticas pueda ser bajo, la rueda no es adecuada
para circular a alta velocidad debido a que no posee una baja conicidad para desplazamientos laterales pequeños.
J. Santamaría et al. / XVIII Congreso Nacional de Ingeniería Mecánica (2010)
6
Es importante resaltar aquí que los valores de la conicidad correspondientes a desplazamientos laterales
próximos a la posición centrada son los que más influencia tienen en la estabilidad del vehículo [6]. La función
de ponderación penaliza por tanto las diferencias entre las curvas para el rango y < 4 mm de forma decreciente,
de manera que la penalización es mayor cuanto menor sea el valor de y. Por otro lado, esta penalización sólo se
aplica si la conicidad real no está comprendida en un cierto rango de valores que se consideran admisibles. Así
como la conicidad no debe superar un cierto valor para asegurar la estabilidad, tampoco es deseable que se
reduzca demasiado ya que puede originar vibraciones de baja frecuencia en el vehículo [7]. En este trabajo, se ha
considerado admisible una conicidad comprendida entre 0.05 y 0.022.
La función de ponderación actúa en el rango y > 4 mm penalizando en mayor medida las diferencias de cotas si
la conicidad real es inferior a la conicidad objetivo. La razón es dirigir el proceso de optimización hacia una
rueda que efectivamente consiga una diferencia de radios de rodadura a partir de y = 4 mm.
y
4 y
p( y)
50
4
4
p( y ) 10
(0 y 4), si 0.05 ó 0.022
(3)
(4 y 6), si (r o )
Para el cálculo de la función objetivo de una rueda, se generan los perfiles de rueda y de carril y se analiza la
geometría del contacto para distintos valores del desplazamiento lateral del eje. Entre otros resultados, se obtiene
la curva de conicidad equivalente de forma discreta, y es posible evaluar la función objetivo f de esa rueda en
particular una vez preestablecidas la curva de referencia y la función de ponderación.
MÉTODO DE OPTIMIZACIÓN
La optimización de la rueda se lleva a cabo mediante la minimización de la función objetivo f. Esta función se
caracteriza por sus cambios bruscos de valor cuando el perfil de rueda varía sensiblemente, por lo que la
utilización de métodos de optimización tradicionales es muy dificultosa y suele arrojar malos resultados. Resulta
especialmente adecuado para este caso el empleo de Algoritmos Genéticos (AG), que han sido aplicados con
éxito en otras disciplinas y también en algunos trabajos relacionados [8-9]. Los AG se basan en la teoría
evolutiva de Darwing, donde los individuos más aptos y mejor adaptados al medio tienen una tasa de
reproducción mayor, por lo que sus características favorables se transmiten a generaciones posteriores. La
especie mejora generación a generación gracias a la mezcla de propiedades entre los individuos más aptos, y a
una cierta tasa de mutación aleatoria que permitirá ampliar el espacio exploratorio.
En el proceso de optimización que aquí se presenta, cada individuo de una generación es una rueda determinada,
y la aptitud se mide lógicamente mediante la función objetivo descrita en el apartado anterior. El problema de
optimización se plantea por tanto en los siguientes términos:
Minimizar: f(x), x Rn
Sujeta a:
Ai < xi < Bi
Siendo:
x = {x1, x2, ... xn}T,
(4)
i=1,...,n
El vector con las variables de diseño x se acota desde el inicio para reducir el espacio de búsqueda a soluciones
realistas y factibles. También es posible imponer restricciones no lineales a dichas variables, como por ejemplo
que la pendiente del perfil sea decreciente hasta la pestaña, aunque como se explicará en el apartado siguiente no
va a ser necesario tal como se han planteado las variables de diseño en este caso.
La optimización mediante GA se realiza utilizando MATLAB, que incluye un módulo específico para este fin.
Es necesario especificar el número de variables de diseño y la función objetivo, realizando el módulo la
optimización en base a unas opciones de cálculo que se especifican de antemano. Se ha seleccionado un tipo de
cruzamiento lineal y una tasa de mutación del 30%. Con una tasa de mutación tan alta se persigue que con una
función objetivo como la que se plantea aquí, la solución no converja rápidamente hacia un mínimo relativo, sino
que en cada generación se continúen explorando soluciones no analizadas. También se utiliza la propiedad de
elitismo, para conservar en cada generación el individuo más apto y no perder esa solución.
El resultado final se obtuvo utilizando una población inicial de 200 individuos y calculando 20 generaciones
sucesivas. El mayor coste computacional se asocia a la evaluación de la función objetivo de cada individuo.
Prácticamente todo el tiempo de cálculo se utiliza para estas evaluaciones, que requieren un análisis geométrico
detallado de los perfiles en contacto para un gran número de posiciones laterales del eje (en cada individuo y en
cada generación), siendo el coste computacional de las otras tareas marginal. La función objetivo se ha
Optimización del perfil de rodadura de una rueda de ferrocarril considerando su conicidad equivalente
7
programado en FORTRAN, y se ha diseñado el correspondiente enlace de comunicación entre los dos lenguajes.
El resultado es un tiempo de cálculo de unos 4 segundos aproximadamente para la evaluación de cada individuo,
utilizando un Intel Core Duo T9900 a 3.06 GHz con 4 GB de RAM. El cálculo completo requirió 4 horas y
media aproximadamente, lo que constituye un tiempo de cálculo bajo comparado con otras optimizaciones de
rueda. Esto es debido a que la utilización de la curva de conicidad como función objetivo evita la necesidad de
realizar un análisis dinámico del vehículo, mucho más costoso en términos computacionales.
Una vez obtenido un perfil de rueda optimizado, es posible afinar un poco más el resultado aplicando métodos de
optimización tradicionales (no evolutivos) partiendo de la solución obtenida con AG. Esto asegura que la
solución obtenida es efectivamente un mínimo, aunque evidentemente no es posible garantizar que se trate del
mínimo absoluto. El propio MATLAB dispone de algoritmos de optimización de este tipo, como fminsearch
(minimización no-lineal de una función vectorial basada en el método de Nelder-Mead). En este caso el tiempo
de cálculo no es tan alto y se necesitaron 24 minutos para evaluar 100 iteraciones.
DEFINICIÓN DEL PERFIL DE RUEDA DE CARA A LA OPTIMIZACIÓN
Cada rueda en el proceso de optimización está representada por un vector x. Las variables xi deben definir
unívocamente el perfil de rueda que representan. Normalmente, estas variables se asignan a un número de puntos
en el plano del perfil de rueda que se interpolan posteriormente para generar el perfil completo. Por ejemplo, es
posible seleccionar n puntos sobre el eje y y asignar una coordenada z variable a cada uno de ellos, constituyendo
estas cotas el vector de variables de diseño [4,8,9]. El perfil queda unívocamente definido realizando la
interpolación de los puntos.
En este trabajo se ha utilizado un enfoque novedoso para la definición del perfil de rueda en el contexto de un
algoritmo de optimización: la curva se define en base a la unión sucesiva de tramos rectilíneos y arcos circulares,
que deben cumplir unas condiciones de contorno específicas. Se define un tramo del perfil de rueda objeto de
optimización. Tal como se muestra en la Fig. (6), el tramo que se deja libre abarca desde la recta de la banda de
rodadura, hasta la recta que forma la pestaña. La parte de la izquierda no interviene en la dinámica de la rueda,
porque el punto de contacto no llega a situarse en esa zona. Por otro lado, la pestaña de la rueda juega un papel
muy importante en la seguridad de rodadura. Tanto la pendiente de la pestaña, como el espesor total, son
parámetros que influyen determinantemente en la seguridad frente al descarrilamiento. Por ello, se deja el perfil
con la misma forma que la rueda original a partir del tramo recto a 70º, conservando de esta manera las
propiedades de la rueda original frente al descarrilamiento.
yo
y1
y2
tg = 1:40
R1
70º
R2
R3
Fig. 6. Zona del perfil de rueda objeto de optimización.
Las condiciones de contorno que se deben cumplir son (ver Fig. (6)): a) El primer tramo es una recta de
pendiente 2.5% que comienza en el mismo punto que la banda de rodadura original. b) El último tramo debe
llegar con una inclinación de 70º al primer punto de la recta que forma la pestaña de la rueda.
Las variables de diseño xi son las curvaturas de los arcos circulares que van formando el perfil (nulas en caso de
tramos rectos) y la coordenada y de los puntos frontera que separan un arco del siguiente. Aunque se puede
utilizar un número de tramos tan alto como se quiera, se consigue un buen compromiso entre flexibilidad en la
definición de la rueda y convergencia en el proceso de optimización utilizando 3 tramos intermedios de
curvatura constante (a parte del primer tramo rectilíneo de pendiente 2.5%). Para ello es necesario definir
únicamente 4 variables de diseño: las curvaturas de los dos primeros tramos (1/R1 y 1/R2), el punto donde
comienza el primer tramo (yo) y el punto donde comienza el segundo tramo (y1). La condición de tangencia en la
pestaña impone dos condiciones que supone que tanto la tercera curvatura (1/R3) como el punto de separación
J. Santamaría et al. / XVIII Congreso Nacional de Ingeniería Mecánica (2010)
8
entre el segundo y tercer tramo (y2) vienen fijados una vez definidas las otras 4 variables.
La definición del perfil de rueda de esta manera en vez de mediante puntos interpolantes genera importantes
ventajas de cara al proceso de optimización:
a)
El número de variables a optimizar es menor. En el caso presentado aquí las variables se reducen a tan
sólo 4, lo cual sería imposible de obtener con la utilización de puntos interpolantes. El número de
variables de diseño es muy importante para la convergencia del método de optimización, ya que cuanto
menor sea este número más probabilidades hay de converger a una solución óptima.
b) El resultado obtenido se corresponde con el perfil de rueda real final, sin necesidad de suavizar la curva
a posteriori o corregir la posición de determinados puntos para eliminar irregularidades o zonas poco
realistas [8].
c) La rueda final queda definida matemáticamente de forma exacta.
d) No es necesario introducir restricciones añadidas al proceso de optimización, como por ejemplo
restricciones relacionadas con la posición relativa de los puntos, la variación de la pendiente del perfil o
cambios en el signo de las curvaturas.
El inconveniente frente a la definición del perfil mediante puntos interpolantes reside en una posible pérdida de
flexibilidad. Esta pérdida de flexibilidad es sin embargo relativa, ya que siempre es posible aumentar el número
de tramos definitorios ampliando el abanico de soluciones y, además, se ha comprobado que con esas 4 variables
únicamente se obtiene un espectro de perfiles suficiente para cubrir las necesidades de un proceso de
optimización como el que se presenta en este trabajo.
RESULTADO DE LA OPTIMIZACIÓN DEL PERFIL DE RUEDA
Una vez definidas las variables de diseño y la función objetivo, se lleva a cabo la optimización (mediante AG
primero y seguidamente con el método de Nelder-Mead) y se obtiene un perfil de rueda solución cuya curva de
conicidad se ajusta de manera óptima (teniendo en cuenta también la función de ponderación) a la definida como
objetivo. La Fig. (7) muestra el perfil de rueda obtenido, indicando también los radios de curvatura de los arcos y
los puntos de separación entre tramos. Como se puede ver, la longitud del tramo recto de la banda de rodadura
queda ahora reducida respecto a la rueda original, comenzando un tramo de pequeña curvatura en una zona
todavía lejana a la pestaña. Esto va a provocar un aumento de la función R pero como se verá, no va a afectar a
la estabilidad.
-5.72
14.32
0
30.92
R = 327
z (mm)
-10
R = 80
R = 12.2
-20
-30
-40
-50
-40
-20
0
20
40
60
y (mm)
Fig. 7. Perfil de rueda obtenido tras la optimización.
La Fig. (8) representa la curva de conicidad equivalente obtenida con la rueda optimizada, comparada con la que
se planteaba como objetivo. El ajuste es excelente, produciéndose un incremento de la conicidad progresivo a
medida que el desplazamiento lateral va aumentando, pero además el valor de la conicidad coincide
prácticamente con el de la rueda original para valores de y inferiores a 4 mm. Este valor = 0.025 constante para
desplazamientos laterales pequeños asegura el mismo nivel de estabilidad que la rueda original.
Optimización del perfil de rodadura de una rueda de ferrocarril considerando su conicidad equivalente
1
9
Conicidad objetivo
Conicidad obtenida
Conicidad
0.8
0.6
0.4
0.2
0
0
1
2
3
4
5
6
7
8
y (mm)
Fig. 8. Comparación de la conicidad equivalente obtenida con el perfil optimizado frente a la objetivo.
En la Fig. (9) se puede comparar la rueda optimizada frente a la original, así como la nueva distribución de los
puntos de contacto sobre los perfiles cuando el eje se desplaza lateralmente. En este último caso se aprecia
claramente la diferencia con la Fig. (3). Los puntos de contacto se distribuyen de manera más uniforme sobre el
perfil de rueda. Esto es beneficioso no sólo para un movimiento lateral del eje progresivo y una disminución de
la tasa de desgaste, sino también para un desgaste más uniforme de la rueda y por tanto la conservación más
duradera del perfil optimizado.
40
Rueda original
Rueda obtenida
30
20
20
-4
4
z (mm)
z (mm)
10
0
-20
7.2
0
-10
-20
-40
-30
-60
-60
-40
-20
0
y (mm)
20
40
60
-40
-50
0
50
y (mm)
Fig. 9. Comparación del perfil de rueda original y el optimizado a la izquierda, y distribución de los puntos de
contacto sobre el perfil de rueda optimizado a la derecha.
RESULTADOS DINÁMICOS
Con el fin de comprobar las mejoras dinámicas del nuevo perfil de rueda, se ha modelizado un vehículo
ferroviario completo en el programa de simulación DINATREN [10], incorporando los perfiles de rueda original
y optimizado. Se trata de un vehículo apto para circular a velocidades de hasta 250 km/h. En las simulaciones
dinámicas se analiza la inscripción del vehículo en tramos curvos de distinto radio, comparando la respuesta
obtenida con los dos perfiles de rueda. La Fig. (10) muestra a modo de ejemplo la tasa de desgaste calculada en
la rueda exterior del primer bogie (la más representativa) al paso del vehículo por curvas de distinto de radio. El
dato mostrado corresponde a la posición de equilibrio cuasiestático del vehículo en la curva. Como se puede ver,
el desgaste se reduce con el perfil de rueda optimizado, especialmente a medida que el radio de la curva se hace
más pequeño. En estos casos, con el perfil original se produce un doble punto de contacto con la pestaña,
situación que se evita con el nuevo perfil.
J. Santamaría et al. / XVIII Congreso Nacional de Ingeniería Mecánica (2010)
10
Fig. 10. Tasa de desgaste en la rueda exterior delantera de un vehículo al paso por curvas de distinto radio, con
el perfil de rueda original (en azul) y el optimizado (en rojo).
CONCLUSIONES
En este trabajo se ha mostrado que es posible utilizar métodos de optimización para mejorar el diseño de perfiles
de rueda de ferrocarril considerando las condiciones de servicio en las que van a ser utilizadas. El proceso de
optimización se plantea en base a una curva de conicidad equivalente objetivo, que asegure tanto una buena
estabilidad en recta como correctas inscripciones en tramos curvos. El proceso de optimización se basa en la
utilización de Algoritmos Genéticos, adecuados cuando la función objetivo es fuertemente no lineal y con
cambios abruptos como es el caso que se plantea, junto a métodos tradicionales aplicados a posteriori. Las
variables de diseño objeto de la optimización están formadas por las curvaturas de los tramos que conformar el
perfil y la posición de los puntos que separan dichos tramos. Con esta definición es posible reducir en gran
medida el número de variables necesarias, utilizando solamente 4 en el ejemplo presentado. Como resultado, se
ha obtenido un perfil de rueda para alta velocidad que mejora las prestaciones del vehículo en tramos curvos
manteniendo la estabilidad inicial.
AGRADECIMIENTOS
Los autores desean agradecer al Ministerio de Fomento por la financiación recibida a través del proyecto Ref:
FOM/2251/2006-T06-83, y al Gobierno Vasco por la subvención IT-453-10.
REFERENCIAS
[1] S.D. Iwnicki, Handbook of Railway Vehicle Dynamics, Taylor & Francis, (2006).
[2] R. Lewis, U. Olofsson, Wheel-Rail Interface Handbook, Woodhead Publishing, (2009).
[3] T. Jendel, Prediction of wheel profile wear - comparisons with field measurements. Wear, 253 (2002), 8999.
[4] I.Y. Shevtsov, V.L. Markine, C. Esveld, Design of railway wheel profile taking into account rolling contact
fatigue and wear, Wear, 265 (2008), 1273-1282.
[5] International Union of Railways (UIC), Testing and approval of railway vehicles from the point of view of
their dynamic behaviour, safety, track fatigue and ride quality, Ficha UIC 518 Ed. 4, (2009).
[6] J. Santamaria, E.G. Vadillo, J. Gomez, Velocidad crítica de vehículos ferroviarios. Diferencias entre
modelos lineales y no lineales, An. Ing. Mec., 2 (2004), 1069-1075.
[7] O. Polach, Wheel profile design for the targeted conicity and a wide contact spreading, 8th Int. Conf. on
Contact Mechanics and Wear of Rail/Wheel Systems, Florencia, Italia (2009).
[8] I. Persson, R. Nilsson, U. Bik, M. Lundgren, S.D. Iwnicki, Use of a genetic algorithm to improve the rail
profile on Stockholm underground, 21st Int. Symp. on Dynamics of Vehicles on Roads and Tracks,
Estocolmo, Suecia (2009).
[9] M. Novales, A. Orro, M.R. Bugarin, Use of a genetic algorithm to optimize wheel profile geometry, Proc.
IMechE, Part F: J. Rail and Rapid Transit, 221 (2007), 467-476.
[10] J. Santamaria, E.G. Vadillo, L. Santamaría, O. Reguart, Dinatren: una nueva herramienta para la
simulación de vehículos ferroviarios, An. Ing. Mec., 1 (2000) 225-232.