Propuesta para la programación básica del Temporizador 1
Anuncio

Propuesta para la programación básica del Temporizador 1 del
microcontrolador PIC18F2550 con el compilador SDCC
Por: I.I.E. Miguel Montiel Martínez
montiel.martinez@gmail.com
Resumen
Este articulo trata sobre la
programación esencial del temporizador/contador 1 de un
microcontrolador PIC18F2550, a través de la utilización del lenguaje de alto nivel C, con el
compilador libre SDCC. Como primer punto es mostrada una guía gráfica de los pasos que
componen a la propuesta del autor, enseguida, se aborda de forma directa la definición del tiempo de
retardo deseado, así como la determinación de los valores de precarga, con estos valores iniciales
obtenidos, se mencionan de forma explícita, los registros que serán afectados en la programación del
tiempo de retardo. Como cuarto punto, se proponen funciones para compilador SDCC que generan el
retardo calculado, llevando como consecuencia natural la generación de un producto, el código
fuente, mismo que se muestra en el quinto apartado, como punto final se obtiene un resultado
simulado por software, que confirma los cálculos previamente realizados.
Palabras clave: PIC18F2550, Temporizador,SDCC.
Introducción
En el artículo Propuesta de la configuración básica del Temporizador 1 del microcontrolador
PIC18F2550, se aborda la parte teórica para la determinación de un valor de precarga, a fin de
obtener un retardo de tiempo.
Es por medio del compilador para dispositivos pequeños de C, denominado SDCC (de sus
siglás en inglés) que se usa el valor de precarga para generar este retardo de tiempo, el cual es
visible, a través de cambios de potencial eléctrico en una terminal de salida, elegida por el
programador, a través de la configuración del hardware del microcontrolador, para generar un
firmware.
A partir de la inserción de firmware en el microcontrolador, se puede verificar los resultados
obtenidos, mediante la técnica de simulación con el software de Labcenter Electronics Proteus, en su
versión de demostración con la herramienta de osciloscopio(Labcenter Electronics, 2011).
De esta forma, al programar un sistema embebido basado en microcontrolador, mediante el
uso de aplicaciones de software libre, no solo se tiene la oportunidad de únicamente aprender, sino
que además de compartir de forma libre el conocimiento (Bañobre & Alvarellos, 2010).
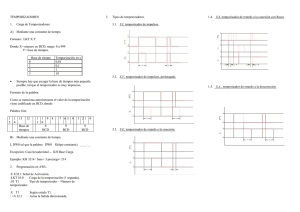
1. Propuesta de método para la programación del temporización
Los elementos que conforman la programación de la temporización generada se representan
en la Ilustración 1: Pasos para la programación de un retardo con el temporizador 1
Definición del tiempo
de retardo
Requerido y requerimientos
Desarrollo del código
fuente principal
Cálculo de valor de
PRECARGA
Compilación del
Código Fuente
Asignación de
valores a registros
asociados con el
Temporizador 1
Formación de las
funciones requeridas
Descarga del .HEX
generado al
microcontrolador
Ilustración 1: Pasos para la programación de un retardo con el temporizador 1
2. Definición del tiempo de retardo y establecimiento de la precarga
Para configurar el Temporizador 1, el programador tuvo que haber definido, la frecuencia de
reloj usada por el sistema, la división de frecuencia deseada y el valor de precarga inicial de
temporización.
Como ejemplo de lo anterior, a continuación, se presenta la configuración requerida para un
microcontrolador que trabaja con un oscilador de cristal a 20MHz, configurado para que internamente,
por medio de un elemento de hardware denominado PLL, incremente la frecuencia de reloj de
sistema a 48MHz, y con esto sea obtenido un retardo de 1.57 ms (Jung, 2010; RedPIC, 2010).
T1INI PRECARGA=65536−
Divisor
1
2
4
8
F osc
⋅Tiempo DESEADO
4⋅divisor
Tmin
0.0833333
0.1666667
0.3333333
0.6666667
Tmax
5461.33
10922.67
21845.33
43690.67
(1)
Tiempo
microsegundos
microsegundos
microsegundos
microsegundos
Tabla 1: Tiempos estimados para una frecuencia de 48MHz
Con los datos presentados, al ser sustituidos en la ecuación (1), se obtiene que el valor de
precarga para el temporizador 1, la resolución se presenta en la ecuación (2)
48MHz
⋅1.57 ms
4⋅1
T1INI =46696
T1INI =65536−
(2)
Nótese que se ha escogido un divisor de frecuencia por 1, esta decisión es con base en la
tabla 3 de la sección 4. Cálculo del tiempo de retardo, en el artículo Propuesta de la configuración
básica del Temporizador 1 del microcontrolador PIC18F2550, ya que en la fila 1, se puede verificar
que el valor máximo de tiempo generado por este divisor es de 5.4 ms aproximadamente, siendo éste
mas adecuado, que el calculado en el segundo renglón, y la razón de esto es porque, el “tick” o
duración del pulso de menor tiempo, es mayor en el segundo caso que en el primero,de esta manera,
se genera así la pérdida de resolución en el tiempo deseado.
3. Definición de valores en registros implicados
A partir del valor de precarga, se hace necesario establecer los valores adecuados a
establecer en cada registro implicado en la configuración del Temporizador 1.
Nombre
INTCON
Bit 7
Bit 6
GIE/GIEH
Bit 5
PEIE/GIEL
Bit 4
TMR0IE
Bit 3
INT0IE
Bit 2
RBIE
Bit 1
TMR0IF
Bit 0
INT0IF
RBIF
PIR1
-
ADIF
RCIF
TXIF
SSPIF
CCP1IF
TMR2IF
TMR1IF
PIE1
-
ADIE
RCIE
TXIE
SSPIE
CCP1IE
TMR2IE
TMR1IE
TMR1L
Valores a cargar en el registro menos significativo del temporizador
TMR1H
T1CON
IPR1
Valores a cargar en el registro más significativo del temporizador
RD16
T1RUN
T1CKPS1
T1CKPS0
T1OSCEN
T1SYNC
TMR1CS
TMR1ON
-
ADIP
RCIP
TXIP
SSPIP
CCP1IP
TMR2IP
TMR1IP
Tabla 2: Registros asociados al Temporizador 1
Siguiendo el orden de los registros mostrados en la Tabla 2: Registros asociados al
Temporizador 1, los valores asociados al Temporizador 1, los valores a asignar, son los que se
muestran a continuación en Tabla 3: Valores de registros asociados al Temporizador 1:
INTCON
0 X X X X X X X No se habilitan interrupciones
globales
PIR1
X X X X X X X 0 Es limpiada la bandera de
interrupción del temporizador 1
PIE1
X X X X X X X 0 No se habilita la interrupción por
desborde del temporizador 1
TMR1L
X X X X X X X X Aún no se carga el registro
TMR1H
X X X X X X X X Aún no se carga el registro
T1CON
1 0 0 0 0 0 0 0
•
•
•
•
•
•
IPR1
La fuente de señal para
el Temporizador 1
proviene del reloj
principal.
No se habilita el
Temporizador 1 como
oscilador.
El divisor de frecuencia
es por uno.
Inicialmente no se da
señal de inicio al
Temporizador.
El temporizador recibe y
entrega 16 bits.
El temporizador se usa
en modo corrida libre.
X X X X X X X 0 No se habilita la interrupción del
periférico Temporizador 1
Tabla 3: Valores de registros asociados al Temporizador 1
4. Propuesta de funciones para la programación retardo de tiempo
En primer lugar debemos generar una función que permita inicializar tanto al temporizador,
como a los pines de entrada – salida del microcontrolador, esta función recibe el nombre de
init_board() y se muestra a continuación:
void init_board(void) {
ADCON1=0x7; // PORTA usado como E/S digital
TRISAbits.TRISA4=0; // salida para temporizador 1
//Etapa de configuración del Temporizador 1
T1CONbits.TMR1CS=0; //Fuente de TMR1CS -> interna fosc/4
T1CONbits.NOT_T1SYNC=0;
T1CONbits.T1OSCEN=0; //No habilitamos temporizador 1 como oscilador
T1CONbits.T1CKPS0=0;
T1CONbits.T1CKPS1=0; //divisor de frecuencias en 1:1
}
El proceso para la generación del retardo se resume en el monitoreo del estado de la
bandera TMR1IF, mientras ésta sea 0, el Temporizador aún no ha llegado al estado de desborde,
cuando ocurre el cruce por cero, la bandera TMR1IF pasa a estado ALTO, haciendo que el ciclo se
interrumpa, enseguida, debe ser apagada la bandera TMR1ON, con el objetivo de detener al
Temporizador y limpiar nuevamente la bandera de interrupción del Temporizador.
La siguiente función muestra el proceso para generar el retardo que se desea:
void pausa_1_57ms(void)
{
TMR1H = T1INIH; //Carga la parte alta del temporizador 1
TMR1L = T1INIL; //Carga la parte baja del temporizador 1
T1CONbits.TMR1ON=1; //Arranca el temporizador 0
while(PIR1bits.TMR1IF == 0); //Esperar hasta que TMR1IF sea uno
T1CONbits.TMR1ON=0; //Detener el temporizador 0
PIR1bits.T1MR1IF = 0; //Limpia la bandera TMR1IF para un nuevo ciclo
}
El valor obtenido para T1INI, es un entero decimal, pero debe transformarse a un número en
hexadecimal y dividirlo en dos bytes, con el fin de realizar la precarga de los registros TMR1H y
TMR1L.
//definiciones -- El número deseado es el 46696 = 0xB668 y debe transformarse a
//
hexadecimal
#define T1INIL
0x68
//parte baja de precarga
#define T1INIH
0xB6 //parte alta de precarga
#define TESTIGO
LATAbits.LATA4 //bit de salida
5. Producto: Código Fuente
Finalmente, el código fuente que se muestra a continuación, configura cada uno de los
elementos mencionados anteriormente, generando así el retardo teórico deseado para encender y
apagar un led conectado en el PIN RA4 cada 3.14ms, es decir a una frecuencia de 318.47Hz
/* ----------------------------------------------------------------------- */
/* Plantilla generada por Piklab */
/* ----------------------------------------------------------------------- */
/** Timer1EnciendeLed.c Este programa configura como salida el puerto RA4
y lo coloca en estado alto después de un tiempo definido por
el TMR1.
Copyright (C) <2011>
<Miguel Montiel Martinez>
montiel.martinez@gmail.com
Este programa es software libre: usted puede redistribuirlo y/o modificarlo
bajo los términos de la Licencia Pública General GNU publicada
por la Fundación para el Software Libre, ya sea la versión 3
de la Licencia, o (a su elección) cualquier versión posterior.
Este programa se distribuye con la esperanza de que sea útil, pero
SIN GARANTÍA ALGUNA; ni siquiera la garantía implícita
MERCANTIL o de APTITUD PARA UN PROPÓSITO DETERMINADO.
Consulte los detalles de la Licencia Pública General GNU para obtener
una información más detallada.
Debería haber recibido una copia de la Licencia Pública General GNU
junto a este programa.
En caso contrario, consulte <http://www.gnu.org/licenses/>.
*/
#include <pic18f2550.h>
/* Bits de configuración: adapte los parámetros a su necesidad */
code char at __CONFIG1L CONFIG1L = _USBPLL_CLOCK_SRC_FROM_96MHZ_PLL_2_1L &
_CPUDIV__OSC1_OSC2_SRC___1__96MHZ_PLL_SRC___2__1L &
_PLLDIV_DIVIDE_BY_5__20MHZ_INPUT__1L;
code char at __CONFIG1H CONFIG1H = _OSC_HS__HS_PLL__USB_HS_1H &
_FCMEN_ON_1H &
_IESO_ON_1H;
code char at __CONFIG2L CONFIG2L = _PUT_ON_2L &
_BODEN_ON_2L &
_BODENV_2_0V_2L &
_VREGEN_OFF_2L;
code char at __CONFIG2H CONFIG2H = _WDT_DISABLED_CONTROLLED_2H &
_WDTPS_1_32768_2H;
code char at __CONFIG3H CONFIG3H = _CCP2MUX_RC1_3H &
_PBADEN_PORTB_4_0__CONFIGURED_AS_DIGITAL_I_O_ON_RESET_3H
& _LPT1OSC_OFF_3H &
_MCLRE_MCLR_ON_RE3_OFF_3H;
code char at __CONFIG4L CONFIG4L = _STVR_ON_4L &
_LVP_OFF_4L &
_ENHCPU_OFF_4L &
_BACKBUG_OFF_4L;
code char at __CONFIG5L
_CP_3_OFF_5L;
code char at __CONFIG5H
code char at __CONFIG6L
_WRT_3_OFF_6L;
code char at __CONFIG6H
code char at __CONFIG7L
_EBTR_3_OFF_7L;
code char at __CONFIG7H
CONFIG5L = _CP_0_OFF_5L & _CP_1_OFF_5L & _CP_2_OFF_5L &
CONFIG5H = _CPB_OFF_5H;
CONFIG6L = _WRT_0_OFF_6L & _WRT_1_OFF_6L & _WRT_2_OFF_6L &
CONFIG6H = _WRTC_OFF_6H & _WRTB_OFF_6H;
CONFIG7L = _EBTR_0_OFF_7L & _EBTR_1_OFF_7L & _EBTR_2_OFF_7L &
CONFIG7H = _EBTRB_OFF_7H;
//definiciones -- El número deseado es el 46696 = 0xB668 y debe transformarse a
//
hexadecimal
#define T1INIL
0x68
//parte baja de precarga
#define T1INIH
0xB6 //parte alta de precarga
#define TESTIGO
LATAbits.LATA4 //bit de salid
//Prototipos
void init_board(void);
void pausa_1_57ms(void);
//Sección de interrupciones
/*Para este fuente no se requiere de interrupciones*/
//Código fuente principal
void main() {
init_board();
while(1)
{
pausa_1_57ms();
TESTIGO = 1;
pausa_1_57ms();
TESTIGO = 0;
}
}
void init_board(void) {
ADCON1=0x7; // PORTA usado como E/S digital
TRISAbits.TRISA4=0; // salida para temporizador 1
//Etapa de configuración del Temporizador 1
T1CONbits.TMR1CS=0; //Fuente de TMR1CS -> interna fosc/4
T1CONbits.NOT_T1SYNC=0;
T1CONbits.T1OSCEN=0; //No habilitamos temporizador 1 como oscilador
T1CONbits.T1CKPS0=0;
T1CONbits.T1CKPS1=0; //divisor de frecuencias en 1:1
}
void pausa_1_57ms(void)
{
TMR1H = T1INIH; //Carga la parte alta del temporizador 1
TMR1L = T1INIL; //Carga la parte baja del temporizador 1
T1CONbits.TMR1ON=1; //Arranca el temporizador 0
while(PIR1bits.TMR1IF == 0); //Esperar hasta que TMR1IF sea uno
T1CONbits.TMR1ON=0; //Detener el temporizador 0
PIR1bits.TMR1IF = 0; //Limpia la bandera TMR1IF para un nuevo ciclo
}
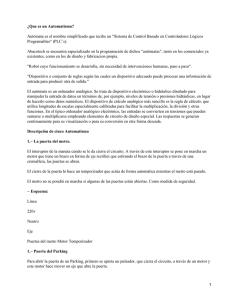
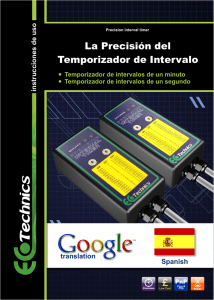
6. Resultados
Después de compilar con éxito el programa mostrado anteriormente con el software Piklab
(Dutta et al., 2010; Gómez & Torres, 2004; Hadacek & Gibaud, 2010; Montiel, 2010a), se realiza una
prueba de simulación con el software ISIS Proteus, propietaria de Labcenter Electronics (Breijo, 2008;
Montiel, 2010b, 2010c), donde al colocar el microcontrolador PIC18F2550 con un osciloscopio virtual,
el cual tiene el cursor de tiempo activado y con bases de tiempo en 0.5 ms/div y en 100µs/div, se
verifica que los valores calculados, son idénticos a los valores mostrados en la Ilustración 2: Tren de
pulsos en RA4, y en Ilustración 3: Aproximación del tren de pulsos en RA4 respectivamente.
Ilustración 2: Tren de pulsos en RA4
Ilustración 3: Aproximación del tren de pulsos en RA4
7. Conclusiones
En este trabajo se presentó, la configuración básica para programar un tiempo determinado en un
microcontrolador PIC18F2550 utilizando el compilador SDCC. Entre las características que podemos
destacar tenemos, el uso de un registro de 16 bits segmentado en dos de 8 bits, programación
basada en los datos que nos presenta directamente la hoja de datos del microcontrolador,
identificación de ecuaciones que permiten el cálculo del retardo de tiempo y un excelente desempeño
mostrado en el simulador especilizado en electrónica analógica, digital y sistemas empotrados ISIS
Proteus, cuya propietaria es Labcenter Electronics.
Finalmente, se puede concluir que, a través de la ecuación (1) de la sección 2. Definición del tiempo
de retardo y establecimiento de la precarga , en conjunto con el compilador de fuente abierta SDCC,
es posible generar tiempos muy exactos y suficientemente confiables.
8. Referencias
Bañobre, D., & Alvarellos, F. (2010). Software Libre (spanish audio). software Libre. España.
Recuperado a partir de http://www.youtube.com/watch?
v=FvLJ2JotttM&feature=youtube_gdata_player
Breijo, E. G. (2008). Compilador C CCS y Simulador PROTEUS para Microcontroladores PIC (1o ed.).
Alfaomega - Marcombo.
Dutta, S., Luois-VERN, J., Vigor, K., Knol, J., Dattalo, S., Bongers, K., Held, B., et al. (2010). SDCC.
SourceForge. Recuperado a partir de http://sdcc.sourceforge.net/
Gómez, J. G., & Torres, A. P. . (2004). Herramientas hardware y software para el desarrollo de
aplicaciones con Microcontroladores PIC bajo plataformas GNU/Linux.
Hadacek, N., & Gibaud, A. (2010). Piklab. SourceForge. Recuperado a partir de
http://piklab.sourceforge.net/devel.php
Jung, E. (2010, Julio 22). Default config for PIC18F4550 20 Mhz (48 Mhz) | MoP. MoP. Recuperado
Agosto 11, 2011, a partir de http://junif.hu/mop/programok/default_config
Labcenter Electronics. (2011). Labcenter Electronics - Downloads. Labcenter Electronics ... the home
of PROTEUS. Recuperado Septiembre 21, 2011, a partir de
http://www.labcenter.com/download/prodemo_download.cfm#professional
Montiel, M. (2010a). Herramientas Libres para la programación de Microcontroladores PIC. Instituto
Tecnológico Superior de Teziutlán Sitio web. Recuperado Agosto 11, 2011, a a partir de
http://www.itsteziutlan.edu.mx/index.php?
option=com_content&view=article&id=597:herramientas-libres-para-la-programacion-demicrocontroladores-pic&catid=27:artlos&Itemid=288
Montiel, M. (2010b, Junio 29). proteus - Piklab PIC18F2550 sdcc y proteus en Ubuntu 10.04. PIc
Linux Foro de debate y recursos compartidos. Recuperado Agosto 11, 2011, b a partir de
http://pic-linux.foroactivo.net/t299-piklab-pic18f2550-sdcc-y-proteus-en-ubuntu-1004?
highlight=proteus
Montiel, M. (2010c). PiklabSdccProteusUbuntu. Teziutlán, Puebla. Recuperado a partir de
http://www.youtube.com/watch?v=9meSBYETG9s&feature=youtube_gdata_player
RedPIC. (2010, Agosto 7). Consiguiendo 4 Mhz para los 48 Mhz necesarios en los PIC’s con USB
2.0. PicManía by RedRaven. Recuperado Agosto 11, 2011, a partir de http://picmania.garciacuervo.net/conceptos.php#USB4Mhz
This document is licensed under the Attribution-ShareAlike 2.5 Mexico license, available at
http://creativecommons.org/licenses/by-sa/2.5/mx/.