Sistemes adaptatius
Anuncio

PRÀCTICA 3
SISTEMES ADAPTATIUS
1.− FILTRAT DE WIENER I SISTEMES ADAPTATIUS
• FILTRAT DE WIENER
El filtrat de Wiener és un cas particular dels filtrats adaptatius. El filtrat de Wiener intenta anar modificant els
pesos d'un filtre FIR de tal forma que la potència del senyal de sortida e[n] sigui mínima. Així doncs, el
problema queda limitat a poder calcular de forma continuada el valor dels coeficients del filtre FIR tals que
aconsegueixen reduir al màxim la potència a la sortida. Aquest càlcul es fa a partir dels senyals S[n] i r[n].
Tenim un filtre FIR de n coeficients que el representem com:
Per tant tenim que la senyal a la sortida del filtre FIR serà:
On SN[n] és una finestra de N mostres de la senyal d'entrada S[n] i la podem representar com:
1
Per altre banda tenim que:
Si calculem la potència de la senyal d'error e[n] tenim el què s'anomena la funció de cost:
Si volem minimitzar l'error quadràtic cal minimitzar la funció de cost i per fer−ho podem calcular−ne la
derivada en totes les n dimensions, és a dir, el gradient.
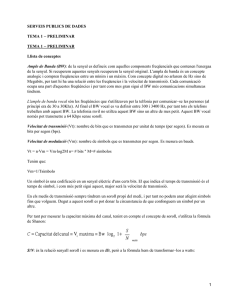
El gradient de la funció de cost té la forma d'una paràbola de n dimensions. És a dir, tenim un problema de
minimització amb tantes dimensions com pesos té el filtre. En el cas d'utilitzar un filtre de dos pesos tenim
que el problema es pot esquematitzar com:
En el cas general de n pesos tenim que en calcular el mínim igualant el gradient a zero i obtenim:
IDENTIFICACIÓ DE SISTEMES
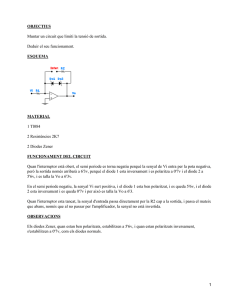
El filtrat de Wiener es pot utilitzar per identificar sistemes incògnits. Per tal de poder identificar sistemes
incògnits ens cal muntar una estructura del següent tipus:
Figura 1. Esquema utilitzat per la identificació de sistemes
Tenim que el desenvolupament obtingut per al filtre de Wiener és un desenvolupament que aconsegueix
obtenir una potència a la sortida mínima. Amb la topologia de la figura anterior podem veure que si
aconseguim tenir a la sortida una potència nul·la tindrem que el filtre de Wiener és idèntic al sistema
incògnita. En el cas que el sistema incògnita sigui un filtre FIR podrem arribar a fer una identificació perfecte
si l'ordre del filtre de Wiener és superior al del filtre incògnita. En el cas que el sistema incògnita sigui un
filtre IIR no el podrem arribar a identificar perfectament mai encara que tinguem molts coeficients.
2
A continuació vaig a demostrar que es pot identificar un sistema introduint soroll a l'entrada del sistema
incògnita i utilitzant un filtre de Wiener d'ordre superior al sistema incògnita.
Per a realitzar aquesta demostració he utilitzat el següent programa en Matlab:
Ordre=40; %Ordre del filtre identificat
FirInc=randn(1,50); %Coeficients d'un FIR incògnita
x=randn(1,500); %Entrem com a senyal soroll
r=filter(FirInc,1,x);
rx=xcorr(x,x,'biased'); %Calculem Rxx real
rxx=rx(length(rx)/2:length(rx)/2 + Ordre−1);%Ens quedem amb part dreta de autocorrelació
rxr=xcorr(x,r,'biased'); %Calculem correlació creuada
rxr=rxr(length(rxr)/2:length(rxr)/2 + Ordre−1);
Rxx=toeplitz(rxx); %Matriu rx(0) diagonal principal rx(1) segones diagonals
H=inv(Rxx)*rxr'; %Calculem els coeficients que minimitzen la sortida
figure(1); %Mostrem el filtre incògnit i el filtre identificat
subplot(2,1,1);
plot(FirInc);
hold on
plot(H,'g');
hold off
XLABEL('Coeficients dels filtres');
YLABEL('Valors dels coeficients');
subplot(2,1,2); %Mostrem l'error comès en la identificació dels coeficients
if length(H)<length(FirInc)
plot(H'−FirInc(1:length(H)));
else
plot(FirInc' − H(1:length(FirInc)));
end;
3
axis([0 length(FirInc) min(FirInc) max(FirInc)]);
ylabel('Error en els coeficients');
XLABEL('Coeficients dels filtres');
Els resultats obtinguts són els esperats, és a dir, si utilitzem un ordre de filtre inferior a l'ordre del sistema a
identificar tenim que cometem error, mentre que si utilitzem un ordre de filtre superior a l'ordre del sistema a
identificat tenim que la identificació és quasi exacta. Si fem el mateix però en comptes de intentar identificar
un sistema que es comporti com un filtre FIR ho fem amb un sistema que es comporti com un filtre IIR tenim
que, independentment de l'ordre del sistema a identificar i de l'ordre del filtre que nosaltres utilitzem per
identificar el sistema, la identificació no és mai exacta i sempre cometem una mica d'error.
Figura 2. Identificació d'un sistema incògnita d'ordre superior al filtre utilitzat en la identificació
4
Figura 3. Identificació d'un sistema incògnita d'ordre inferior al filtre utilitzat en la identificació
LIMITACIONS DEL FILTRAT DE WIENER
Les limitacions a l'hora d'utilitzar el filtrat de Wiener són bàsicament dos: en primer lloc la gran potència de
càlcul que és necessària per tal de realitzar el càlcul d'una matriu inversa i per altre banda el fet d'haver de
calcular una autocorrelació que està definida entre menys infinit i més infinit.
Cal tenir en compte que si els senyals d'entrada no són estacionaris (cas més probable) tenim que les
autocorrelacions aniran variant en el temps i per tant tindrem que haurem de calcular hN* repetidament. Per
aplicacions que necessiten el temps real no podem utilitzar dons el filtrat de Wiener i per tant s'utilitza un altre
mètode que permet calcular els coeficients òptims del filtre (hN* ) mostra a mostra sense haver de calcular les
autocorrelacions. Aquests mecanismes s'anomenen sistemes adaptatius.
Càlcul d'una matriu inversa
El fet d'haver d'invertir una matriu implica haver de disposar d'una potència de càlcul molt elevada que tant
sols es veu reduïda si la matriu és del tipus toeplitz. Aquest inconvenient que pot semblar no gaire important
és un factor de limitació important a l'hora de la seva utilització ja que impossibilita la seva utilització en totes
aquelles aplicacions que necessiten el càlcul en temps real i per tant el filtrat de Wiener queda reduït a la
utilització en llocs on el temps de càlcul no és molt rellevant.
Càlcul d'una autocorrelació
Com ja he dit anteriorment, per tal de calcular una autocorrelació verdadera cal realitzar una integral de menys
a més infinit i per tant és impossible realitzar−la físicament. La solució està en fer el càlcul aproximat de
l'autocorrelació mitjançant una finestra. El problema d'aquest mètode és que la solució no és una
autocorrelació estrictament dita i, per tant, la matriu resultant no és toeplitz i per tant el càlcul de la matriu
inversa es complica molt.
5
Per tal de fer una estimació de l'autocorrelació tenim dos mètodes:
* Càlcul de l'autocorrelació utilitzant una finestra constant
Aquest mètode es basa en utilitzar una finestra de mida constant del senyal a correlar. Utilitzem tota la senyal
per realitzar l'autocorrelació però només contemplem les mostres que es troben dins la finestra. Aquest
mètode ens dona una bona aproximació a l'autocorrelació però el problema és que no es tracta d'una
autocorrelació pròpiament dita i per tant el resultat no és un vector parell i per tant no es pot utilitzar com una
matriu toeplitz. El mecanisme es basa en:
Figura 4. Estimació d'una autocorrelació utilitzant finestra constant
* Càlcul de l'autocorrelació considerant tant sols el senyal enfinestrat
Aquest mètode té la avantatge que si que calculem una autocorrelació verdadera i per tant el resultat es un
vector parell que pot utilitzar en una matriu toeplitz i ens facilita el càlcul de la matriu inversa. El problema és
que estem calculant l'autocorrelació d'un senyal que no és el senyar real, sinó que és un senyal que coincideix
amb el senyal real durant la finestra i la resta val zeros. El mètode que s'utilitza per calcular l'autocorrelació
d'aquesta manera és:
6
Figura 5. Càlcul de l'autocorrelació d'una senyal prèviament enfinestrada
• SISTEMES ADAPTATIUS
Un sistema adaptatius són aquells que adapten els seus coeficients mostra a mostra o bloc a bloc en funció del
senyal d'entrada. L'esquema bàsic de tot sistema adaptatiu és:
Figura 6. Esquema d'un sistema adaptat
Un filtre adaptatiu és un filtre digital que té la capacitat d'adaptar les seves característiques en el temps.
Usualment desitgem separar senyal i soroll que ocupen bandes de freqüències diferents, en aquests casos un
filtre lineal amb coeficients fixes ens solucionarà el problema. A vegades però, és necessari que les
característiques del filtre siguin variables adaptant−se a la variació de les característiques del senyal en cada
instant de temps. Aquests filtres tenen la característica que els coeficients es van modificant al llarg del temps
i, per tant, també la seva resposta freqüencial es veu alterada al llarg del temps.
Un dels sistemes adaptatius millors és l'anomenat LMS (Least Mean Square) que es basa en anar ajustant els
coeficients mostra a mostra de tal forma que es minimitzi l'error quadràtic mig.
La idea és senzilla: en comptes de calcular on es troba el mínim en la funció de cost es tracta de realitzar una
aproximació recursiva fins a trovar−lo. Es tracta doncs de realitzar una espècie de aproximació per càlcul
numèric (semblant a Boltzano) fins a trobar la hN* però sense calcular−la. El funcionament de l'algorisme es
basa en anar modificant els pesos del filtre en sentit descendent del gradient i per tant anirem en direcció al
mínim.
Això permet evitar els càlculs de les matrius d'autocorrelació i per tant estalviar molts càlculs de tal forma que
permeten implementar aquest algoritme en temps real.
Els pesos del filtre es modifiquen mostra a mostra de la següent forma:
• Fixar tots els pesos a un valor inicial com per exemple 0
7
• Calcular la sortida del filtre com:
• Calcular l'error estimat:
• Modificar els següents pesos del filtre
(5) Tornar al punt (2)
A la pràctica tenim que mitjançant aquesta metodologia mai aconseguim el valor obtingut per Wiener, però la
solució obtinguda fluctua entorn la solució òptima (la calculada mitjançant Wiener). Per altre banda, el
sistema serà estable mentre el pas d'aprenentatge () estigui comprès entre 0 i el màxim valor de la matriu de
covariança de la senyal d'entrada.
La funció que he utilitzat que calcula els coeficients òptims mitjançant el mètode de LMS és:
function [Hnou,err]=LMS(S,R,E,Ordre,h)
if nargin==4
h=zeros(1,Ordre); %Definim els coeficients si no els hem passat
VecSen=zeros(1,Ordre); %Definim els finestra de senyal
end;
%Implementació de l'algorisme LMS
for i=1:length(S) %Realitzem càlcul mostra a mostra per totes les mostres
if (i>Ordre) %Només podem començar quan i>Ordre per no accedir a vector(<0)
YN=0;
for j=1:Ordre
YN=YN+h(j)*S(i−j+1);
end;
err(i)=R(i)−YN; %Calculem error
for j=1:Ordre %Calculem nous coeficients
h(j)=h(j)+E*err(i)*S(i−j+1);
8
end;
end;
end;
Hnou=h; %Retornem valors calculats
Per tal de fer la identificació del sistema a part he fet:
Ordre=20; %Definim ordre del sistema identificació
E=0.005; %Valor pas d'aprenentatge
Senyal=randn(1,1000); %Entrem soroll
FirInc=randn(1,20); %Filtre incògnita
r=filter(FirInc,1,Senyal); %Obtenim la referència r
[h,err]=LMS(Senyal,r,E,Ordre); %Realitzem identificació
figure(1); %Mostrem els resultats
subplot(3,1,1);
plot(FirInc);
ylabel('Coeficients filtre incògnita');
subplot(3,1,2);
plot(h);
ylabel('Coeficients filtre identificat');
xlabel('Coeficients');
subplot(3,1,3);
plot(err);
xlabel('Mostres');
ylabel('Error');
El que he pogut observar és que si utilitzo un valor petit per al pas d'aprenentatge () tenim que el sistema
tarda més en convergir però obtenim un error residual molt petit, mentre que si utilitzo un pas d'aprenentatge
() gran el sistema és molt més ràpid en convergir però el valor residual d'error és més gran.
A continuació tenim una identificació d'un sistema FIR d'ordre 20 (utilitzant soroll blanc a l'entrada)
mitjançant l'algorisme LMS i amb diferents valors per el pas d'aprenentatge:
9
Figura 7. Identificació d'un sistema FIR mitjançant l'algorisme LMS amb =0,005
En aquesta identificació obtenim un error residual de 1,094E−4
10
Figura 8. Identificació d'un sistema FIR mitjançant l'algorisme LMS amb =0,05
En aquest cas he obtingut un error residual molt major que en el cas anterior 0,77. Observem per altre banda
que en aquest cas només calen 200 mostres per tal d'haver adaptat el sistema, mentre que en la gràfica anterior
calien unes 700 mostres per adaptar el sistema.
En el cas d'introduir senyal de veu obtenim resultats similars, però amb la diferència que cal utilitzar un valor
per al pas d'aprenentatge molt menor per tal que el sistema sigui estable.
A continuació tenim les gràfiques de com evoluciona la potència de la senyal d'error en funció del pas
d'aprenentatge. La primera gràfica és quan apliquem a l'entrada soroll, mentre que la segona és quan apliquem
senyal de veu a l'entrada.
11
Figura 9. Evolució de la potència d'error en funció de amb soroll a l'entrada
Figura 10. Evolució de la potència d'error en funció de amb senyal de veu a l'entrada
12
Observem que les dues gràfiques són idèntiques i amb la única diferència que per tal de trobar els coeficients
amb senyal de veu a l'entrada cal un valor del pas d'aprenentatge molt inferior que en el cas d'introduir soroll.
Per altre banda, tenim que tenen aquesta forma ja que quan menor és tenim que el sistema tarda més en
convergir i per tant tenim més tros amb un error important, mentre que quan és gran tenim que el sistema
convergeix ràpidament i per tant la potència d'error és molt menor. No arribem mai a potència d'error zero ja
que tot i que el sistema convergeixi molt ràpidament ens queda un error residual que és degut a que els pesos
del filtre calculat van fluctuant entorn als valors òptims.
Per realitzar aquestes gràfiques he realitzat els següents passos:
Ordre=20; %Definim ordre
Senyal=wavread('test.wav'); %Apliquem a l'entrada senyal de veu
Senyal=Senyal(length(Senyal)−10000:length(Senyal));
Senyal=Senyal−mean(Senyal);
FirInc=randn(1,20); %Definim el filtre a identificar
r=filter(FirInc,1,Senyal); %Calculem r
i=0;
for E=0.000005:0.000001:0.00005 %Realitzem escombrat en pas d'apren.
[h,err]=LMS(Senyal,r,E,Ordre); %Calculem h i err
i=i+1;
Pot(i)=err*err'; %Calculem potència d'error
pua(i)=E;
end;
figure(1);
plot(pua,Pot); %Mostrem resultat
xlabel(`Pas de aprenentatge');
ylabel(`Potència de error');
2.− CANCEL·LACIÓ CEGA D'ECOS
En aquest apartat he de realitzar els algorismes de generació i cancel·lació d'eco no reverberant. En primer lloc
m'agradaria explicar els dos tipus d'eco que existeixen:
Eco reverberant
L'eco reverberant es caracteritza per tenir diverses repeticions de la senyal original retardades i amb potència
13
cada cop inferior. Podem modelar l'eco reverberant com:
Com podem observar tenim que la senyal amb eco està composta per la senyal sense eco amb diverses
rèpliques retardades i cada cop amb menys amplitud. Aquest eco apareix en tot recinte tancat ja que les
reflexions de la veu en les parets del recinte provoquen que ens arribin amb retard rèpliques de la senyal.
Eco no reverberant
L'eco no reverberant es caracteritza per tenir tant sols una repetició retardada del senyal. Per tant podem
modelar l'eco no reverberant com:
Per tant tenim que la funció de transferència d'un generador d'eco no reverberant és:
GENERACIÓ D'ECO NO REVERBERANT
Si volem realitzar una funció generadora d'eco no reverberant ens cal tant sols implementar aquest filtre i
aplicar−lo a alguna senyal d'entrada. A continuació tenim el codi que he utilitzat per fer una funció que generi
eco no reverberant:
function [y]=EcoNoRev(Senyal,RetEco,AmpEco)
% function [y]=EcoNoRev(Senyal,RetEco,AmpEco)
% Genera eco no revereberant
% RetEco => Retard de l'eco
% AmpEco => Amplitud de l'eco
Tmp=[1,zeros(1,RetEco−2),AmpEco]; % Defineix el filtre
y=filter(Tmp,1,Senyal); % Aplica el filtre
Si apliquem soroll blanc a l'entrada del filtre i fem l'autocorrelació a la sortida tenim:
14
Figura 11. Autocorrelació de soroll blanc amb eco no reverberant
Com podem observar en l'autocorrelació tenim que hi ha una repetició dels senyal d'entrada (Soroll) al cal de
100 mostres i que té una potència inferior a la potència del senyal pròpiament dit. Aquesta gràfica l'he
obtingut introduint el següent codi:
Retard=100;
Amplitud=0.5;
Senyal=randn(1,1000); % Senyal d'entrada
SenyalEco=EcoNoRev(Senyal,Retard,Amplitud); % Realitza el filtrat per afegir eco
z=xcorr(SenyalEco,SenyalEco); % Calcula autocorrelació
pua=−length(z)/2+1:length(z)/2; % Realitza canvi d'eix per zero al centre
figure(1);
plot(pua,z); % Mostra els resultats
TITLE('Rxx DEL SENYAL AMB ECO NO REVERBERANT');
Com podem observar en la gràfica de la figura 11, tenim que la relació de potència entre el senyal i l'eco és
d'aproximadament 0,25 i això és degut a que la relació d'amplitud entre el senyal i l'eco és de 0,5 i per tant la
relació en potència és de 0,52.
CANCEL·LACIÓ D'ECO NO REVERBERANT
15
Per tal de generar una funció de cancel·lació d'eco no reverberant a ceges he utilitzat l'algorisme LMS però
seguint l'estructura del cancel·lador que és la següent:
Figura 12. Esquema del cancel·lador d'eco no reverberant
El programa que he utilitzat que implementa aquest esquema és el següent:
function [SNet,hn]=Cancel(SBrut,RetMin,E,Ordre,h)
% [SNet,hn]=Cancel(SBrut,E,Ordre)
% Cancel·la eco no reverberant
if nargin==4
h=zeros(1,Ordre); %Definim els coeficients si no els hem passat
end;
err=zeros(1,length(SBrut));
%Implementació de l'algorisme LMS
for i=1:length(SBrut) %Realitzem calcul per totes les mostres
if (i>max(Ordre,RetMin))
S(i)=err(i−RetMin);
YN=0;
for j=1:Ordre
YN=YN+h(j)*S(i−j+1);
end;
err(i)=SBrut(i)−YN;
for j=1:Ordre
h(j)=h(j)+E*err(i)*S(i−j+1);
end;
end;
end;
SNet=err; %Retornem senyal amb eco cancel·lat
hn=h; %Retornem coeficients del filtre estimat
16
COMPORTAMENT DEL CANCEL·LADOR AMB SOROLL A L'ENTRADA
Tenim el nostre cancel·lador d'ecos al que li apliquem soroll blanc al que prèviament li hem afegit un eco no
reverberant. Al afegir un eco no reverberant al soroll tenim que en l'autocorrelació d'aquest soroll apareixeran
dos pics que corresponen un a la potència de soroll i l'altre a l'eco. Un cop hem aplicat aquest soroll al
cancel·lador, aquest intentarà minimitzar la potència de senyal a la sortida i com que hi apliquem un retard
mínim no podrà minimitzar−se mitjançant la cancel·lació amb el propi senyal per tant no tindrà altre solució
que cancel·lar l'eco. Si fem aquest procés obtenim les següents gràfiques:
Figura 13. Autocorrelacions del senyal a l'entrada i a la sortida del cancel·lador
17
Figura 14. Filtre FIR identificat en el procés de cancel·lació
Com podem observar tenim que aquest filtre s'assembla al filtre que estem buscant que hauria de ser:
En aquest cas hem introduït un eco d'amplitud 0,5 (A=0,5) i de retard 30 (RetEco=30). Per altre banda he
utilitzat un retard mínim de 10 mostres i per tant podem observar que en el coeficient 20 tenim un valor de 0,5
aproximadament. El coeficient 20 és el coeficient que fa que es cancel·li el retard situat a una distància de 30
mostres si el retard mínim és de 10 mostres. Com es pot observar tenim que la resta de coeficients que haurien
de ser zero estan entorn a zero però no són exactament zero.
El programa utilitzat per realitzar aquestes gràfiques ha estat:
Ts=1/8000;
Retard=30; %Posició del eco
Amplitud=0.5;
%Lectura de la senyal d'entrada
Senyal=randn(1,1000);
SenyalEco=EcoNoRev(Senyal,Retard,Amplitud); %Apliquem eco no reverberant
Ordre=50; %Ordre del filtre a identificar
18
RetMin=10; %Retard mínim
E=0.005; %Pas d'aprenentatge
[SNet,hn]=Cancel(SenyalEco,RetMin,E,Ordre); %Cancel·lem eco
COMPORTAMENT DEL CANCEL·LADOR AMB SENYAL DE VEU AMB ECO
A continuació estudiem el comportament del cancel·lador mitjançant el senyal de veu a l'entrada. Aquí tenim
un exemple dels resultats obtinguts amb aquest esquema:
Figura 15. Autocorrelacions del senyal amb eco i del senyal amb eco cancel·lat
Com es pot observar en les autocorrelacions hem aconseguit una cancel·lació bastant bona tot i que no és total.
A continuació tenim una gràfica amb la senyal temporal amb eco i un cop se li ha aplicat el cancel·lador
d'ecos.
19
Figura 16. Senyal amb eco no reverberant i senyal resultant de la cancel·lació
A continuació tenim els coeficients del filtre FIR que hem estimat amb l'algorisme:
20
Figura 17. Coeficients del filtre FIR estimat
Aquesta gràfica ha estat realitzada amb un retard mínim de 1400 i el retard de l'eco era de 1600 mostres
(200ms). Per altre banda hi havia definit un ordre pel filtre a identificar de 400. Tenim que idealment hauríem
de tenir uns coeficients que corresponguessin a la inversa del filtre de generació d'eco no reverberant i per tant
hauriem de tenir:
Per una banda tenim que el retard total que obtenim és la suma del retard mínim, que en aquest cas és de 1400,
més el retard estimat en els coeficients, que en aquest cas és de 200, i per tant tenim un retard total de 1600
que coincideix amb el retard de l'eco. Per altre banda tenim que l'amplitud del pic A hauria de ser igual a
l'amplitud amb la que hem generat l'eco (en aquest cas era de 0,5) i per altre banda hem estimat una amplitud
de 0,45 i per tant la cancel.lació de l'eco no pot ser perfecte. Per altre banda, tenim que tots els coeficients a
excepció del situat al pes 1600 (Retard mínim + Retard estimat) haurien de ésser zero i en aquest cas tenim
que són valors molt petits i que oscil·len entre el zero però no són zero.
Així doncs, tenim que idealment hauríem d'esperar obtenir els següents coeficients:
Figura 18. Coeficients del filtre FIR que esperava obtenir
Com podem observar tenim que els valors que esperàvem obtenir i els valors obtinguts tampoc són molt
semblants però no iguals. És per això que no cancel·lem adequadament el 100% de l'eco que teniem en el
senyal original.
Per obtenir aquestes gràfiques he utilitzat el següent codi de programa:
Ts=1/8000;
Retard=1600; %200ms a 8KHz
Amplitud=0.5;
%Lectura de la senyal d'entrada
Senyal=wavread('test.wav');
Senyal=Senyal−mean(Senyal);
SenyalEco=EcoNoRev(Senyal,Retard,Amplitud); %Generem eco no reverberant
Ordre=400;
RetMin=1400;
E=0.000001;
[SNet,hn]=Cancel(SenyalEco,RetMin,E,Ordre); %Cancel·lem l'eco no reverberant
figure(1); %Representem les autocorrelacions
21
subplot(2,1,1);
z=xcorr(SenyalEco,SenyalEco);
Dummy=−length(z)/2+1:length(z)/2;
plot(Dummy,z);
ylabel('xcorr del senyal amb eco');
subplot(2,1,2);
z=xcorr(SNet,SNet);
Dummy=−length(z)/2+1:length(z)/2;
plot(Dummy,z);
ylabel('xcorr del senyal netejat');
figure(2); %Representem els senyals en temps
t=Ts:Ts:length(SenyalEco)*Ts;
plot(t,SenyalEco,'g');
hold on
plot(t,SNet);
hold off;
xlabel('Temps (segons)');
figure(3); %Representem els coeficients del filtre obtingut
plot(hn);
TITLE('PESOS DEL FILTRE IDENTIFICAT');
XLABEL('Posició dels pesos');
sound(SenyalEco)
sound(SNet)
ESTUDIAR EL COMPORTAMENT AL VARIAR L'ESTIMACIÓ DE LA POTÈNCIA
En aquest cas ens cal estimar la potència del senyal d'entrada a partir d'una finestra de N mostres. Amb
aquesta potència i una constant de proporcionalitat calcularé el valor del pas d'aprenentatge que s'ha d'utilitzar
en cada mostra. L'avantatge d'aquest mètode és que es va adaptant el valor del pas d'aprenentatge a la potència
del senyal de tal forma que en els llocs on la potència de senyal sigui gran tindrem un valor pel pas
22
d'aprenentatge petit i per tant el sistema continuarà essent estable, mentre que en els punt on la potència del
senyal d'entrada sigui petita tindrem que el valor del pas d'aprenentatge podrà ser superior mantenint la
estabilitat del sistema i per tant tindrem un sistema millor.
He modificat el programa cancel·lador d'ecos per tal d'afegir l'estimació de la potència i el càlcul del valor
d'aprenentatge mostra a mostra en funció de la potència estimada.
function [SNet,hn]=Cancel(SBrut,RetMin,K,Ordre,h)
% [SNet,hn]= Cancel(SBrut,RetMin,K,Ordre,h)
% Cancel·la eco no reverberant amb estimació de potència
Pot=0; %Inicialitza potència estimada
LongVent=100;
Beta=(LongVent−1)/LongVent;
............
err(i)=SBrut(i)−YN;
if i<LongVent %Estimació de potència
Pot=((i−1)*Pot+SBrut(i−RetMin)*SBrut(i−RetMin))/i;
else
Pot=Beta*Pot + (1 − Beta)*SBrut(i−RetMin)*SBrut(i−RetMin);
end;
if Pot>0 %Calcula pas d'aprenentatge en funció de Pot
E=K/(Ordre*Pot);
else
E=0;
end;
for j=1:Ordre
h(j)=h(j)+E*err(i)*S(i−j+1);
end;
..............
A continuació tenim una gràfica que mostra l'evolució dels coeficients del filtre FIR identificat en funció del
23
valor del paràmetre K utilitzat en el valor del pas d'aprenentatge.
Figura 19. Coeficients del filtre FIR per diferents valors de K
Tenim que per valors petits de K ens cal una durada molt més elevada de mostres de la senyal d'entrada per tal
d'obtenir una estimació acceptable dels coeficients. Per altre banda, al augmentar el valor de K tenim que cada
cop obtenim una estimació més adequada del coeficient a on hi ha el retard, però per altre banda, tenim més
dispersió entre els coeficients que haurien de ser zero.
El programa que he utilitzat per obtenir la gràfica anterior és:
Retard=30; %Característiques de l'eco introduït
Amplitud=0.5;
%Lectura de la senyal d'entrada
Senyal=randn(1,1500);
SenyalEco=EcoNoRev(Senyal,Retard,Amplitud); %Generació de l'eco
Ordre=50;
RetMin=10;
figure(1);
hold on;
24
for K=1/1000:1/100:1/10
[SNet,hn]=Cancel(SenyalEco,RetMin,K,Ordre); %Cancel·lació de l'eco
plot(hn); %Representació dels coeficients obtinguts
end;
TITLE('PESOS DEL FILTRE IDENTIFICAT');
XLABEL('Posició dels pesos');
hold off;
NETEJAR TANT COM SIGUI POSSIBLE LA SENYAL DE VEU
Ara tenim que no cal tenir temps real i per tant podem analitzar tota la senyal de veu primer i en segon lloc fer
el processat. He decidit inventar una estratègia pròpia per tal de treure el eco. L'estratègia es basa en
identificar automàticament l'eco a partir de l'autocorrelació i extreure'n els seus paràmetres (retard i amplitud)
i un cop els tenim aplicar el filtre cancel·lador d'eco no reverberant suposant que coneixem aquests
paràmetres. L'eliminació que s'aconsegueix és òptima de tal forma que es neteja totalment el senyal.
El programa utilitzat és:
function [SNet]=ideal(SBrut,RetMin)
z=xcorr(SBrut,SBrut); %Fa autocorrelació
[yMax,xMax]=max(z); %Detecta punt màxim
IncThr=abs( max(z)−min(z) )/100; %Resolució de detecció de posició eco
%Anem baixant threshold de comparació fins a trovar eco
xEco=[];
Threshold=yMax−IncThr;
while xEco==[]
Tmp=find(z>Threshold);
pua=find( (abs(Tmp−(length(z)/2) )>RetMin) & (Tmp>length(z)/2) );
xEco=Tmp(pua);
Threshold=Threshold−IncThr;
end;
%Calculem la posició del eco
25
RetEco=xEco−(length(z)/2)
AmpEco=sqrt(z(xEco)/yMax)
%Apliquem filtre IIR amb els valors estimats per eliminar eco
SNet=filter(1,[1 zeros(1,RetEco−2) AmpEco], SBrut);
Funcionament de l'algorisme. En primer lloc fem l'autocorrelació del senyal amb eco. En segon lloc detectem
l'amplitud de l'autocorrelació a l'origen. A continuació calculem l'increment per al llindar de comparació com
una fracció de l'amplitud màxima de l'autocorrelació. En segon lloc anem mirant tots els punts de
l'autocorrelació que sobrepassen un cert nivell de comparació (Threshold) i anem baixant el nivell fins que ens
trobem amb l'eco. Un cop tenim la posició de l'eco ja podem conèixer−ne els seus dos paràmetres: l'amplitud i
el retard. Finalment apliquem el filtre cancel·lador d'ecos amb els valors d'amplitud i retard estimats i
eliminem l'eco.
Figura 20. Autocorrelació del senyal amb eco i un cop eliminat l'eco
Com es pot observar en les autocorrelacions he obtingut un senyal totalment net d'eco i per tant les
estimacions són correctes. Si observem els senyals en el temps tenim:
26
Figura 21. Senyal amb eco i senyal net d'eco
Per tal d'obtenir les dues gràfiques anteriors he utilitzat el següent programa:
Retard=1600; %200ms a 8KHz
Amplitud=0.8;
RetMin=20;
%Lectura de la senyal d'entrada
Senyal=wavread('test.wav');
Senyal=Senyal−mean(Senyal);
SenyalEco=EcoNoRev(Senyal,Retard,Amplitud); %Afegim eco al senyal
%Aplicació de la cancel·lació ideal amb estimació dels paràmetres de l'eco
[SNet]=ideal(SenyalEco,RetMin);
sound(SenyalEco);
sound(SNet);
%Representació de les autocorrelacions
figure(1);
27
subplot(2,1,1);
z=xcorr(SenyalEco,SenyalEco);
Dummy=(−length(z)/2+1:length(z)/2);
plot(Dummy,z);
ylabel('xcorr del senyal original');
subplot(2,1,2);
z=xcorr(SNet,SNet);
plot(Dummy,z);
Dummy=(−length(z)/2+1:length(z)/2);
plot(Dummy,z);
ylabel('xcorr del senyal net');
%Representació temporal del senyal net i el senyal amb eco
figure(2);
plot(SenyalEco);
hold on
plot(SNet,'g');
hold off;
L'algorisme que he dissenyat és molt ràpid i funciona molt correctament. Té l'únic inconvenient que necessita
disposar de tota la senyal prèviament abans de poder−la netejar i per tant no es pot implementar en temps real.
Apart d'aquest inconvenient tenim que és un mecanisme molt ràpid i que permet netejar totalment qualsevol
senyal de veu amb eco no reverberant.
Una altre opció és utilitzar l'algorisme LMS i aplicar−lo iteradament de tal forma que cada cop els coeficients
del filtre van tendint més al filtre cancel·lador ideal i per tant la cancel·lació és millor. Aquest mètode trobo
que és massa lent i que no aconsegueix resultats tant òptims com els que he obtingut amb el meu mètode.
Processat del senyal
1
24
200
400
28
0
0
0,5
Senyal amb eco cancel·lat
err
Senyal amb eco
r
Y
eK[n]
XK[n]
YK[n]
FILTRE WIENER
r[n]
SISTEMA ?
eK[n]
Y[n]
S[n]
FILTRE WIENER
Jmin
hN*
h(1)
h(0)
J
e[n]
r[n]
S[n]
29
FILTRE FIR
y[n]
S
FIR
Z−D
ECO
30