CAPÍTULO 2_ MATERIALES Y MÉTODO
Anuncio

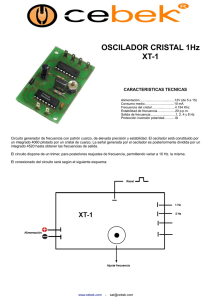
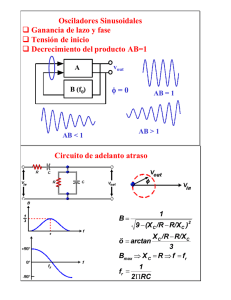
CAPÍTULO 2: MATERIALES Y MÉTODO Teniendo en cuenta el objetivo del proyecto y a la vista de la revisión bibliográfica realizada en la introducción, se plantean una serie de requisitos de diseño que debe cumplir el dispositivo sensor de medida del ritmo respiratorio: - Dispositivo de bajo coste. - Fiable y robusto en las mediciones. - Fácil instalación y manejo. - Adaptado a cualquier usuario. - Recomendable no invasivo. Un estudio preliminar realizado en la asignatura de “Control de Sistemas Biomédicos” (Máster Oficial en Automática, Robótica y Telemática de la Universidad de Sevilla), pudo determinar que la tecnología capacitiva era la más adecuada para satisfacer los requisitos fijados en el presente proyecto. Teniendo en cuenta el estudio preliminar, se ha seleccionado la tecnología de sensorización capacitiva como base para la medida del ritmo respiratorio, ya que frente a otras soluciones [16]-[18], esta tecnología presenta una serie de ventajas: - El precio del sensor sería reducido al utilizar componentes electrónicos estándar. - Los sensores capacitivos son ampliamente utilizados en la industria y con bastante eficiencia, por ello consideramos que adaptarlo para otro sector como el sanitario, podría ser algo realizable y beneficioso. - Cumplen por su propia configuración interna el requisito de evitar el contacto entre los electrodos y el paciente. - La resolución de los sensores capacitivos en distancias cortas es bastante elevada. - El parámetro más relevante para producirse alteraciones en la frecuencia de trabajo en los sensores capacitivos, son las variaciones del dieléctrico producido entre los electrodos. En nuestro caso el dieléctrico crítico es el aire de los pulmones. 2.1 Sensores capacitivos Una vez seleccionado el tipo de sensor a utilizar en el proyecto, realizaremos una descripción del fundamento físico de los sensores capacitivos, describiremos su funcionamiento y aplicaciones en diferentes sectores industriales. 2.1.1 Introducción Los sensores capacitivos están basados en la variación de la capacidad entre dos o más conductores (electrodos) entre los que se encuentra un dieléctrico. Este dieléctrico modifica sus propiedades en respuesta a la variación de alguna magnitud física. Aunque las aplicaciones más conocidas están asociadas con medidas del movimiento lineal y angular (acelerómetros y giróscopos), los sensores capacitivos se emplean también para la medida de humedad, presión, nivel, etc. Cabe destacar que la capacidad es siempre una cantidad positiva y que depende de la geometría del condensador considerado (de placas paralelas, cilíndrico, esférico). Otro factor del que depende es del dieléctrico que se introduzca entre las dos superficies del condensador. Cuanto mayor sea la constante dieléctrica del material no conductor introducido, mayor es la capacidad. 2.1.2 Sensores capacitivos en la industria Dadas sus características, los sensores capacitivos han sido ampliamente utilizados en la industria, para lograr detectar materiales aislantes tales como el plástico, el papel, la madera, entre otros. No obstante también cuentan con la capacidad de detectar metales. Para comprender como funcionan los sensores capacitivos en este ámbito, aclaramos que generalmente éstos constan de una sonda que se encuentra situada en la cara posterior de donde se encuentra colocado el electrodo. Al aplicar una corriente al sensor, aunque ésta sea mínima, se genera un campo electroestático el cual reacciona frente a los cambios de la capacitancia provocados por la presencia de un objeto cualquiera. Podemos observar un esquema del funcionamiento de un sensor capacitivo industrial en la figura 1. Fig.1 Esquema funcionamiento sensor capacitivo en la industria En las figura 2 observamos algunos ejemplos de sistemas industriales con utilización de sensores capacitivos. Fig. 2.1 Control de nivel de fluido dentro del recipiente Fig. 2.2 Control de nivel de llenado y posición Fig. 2.3 Control de nivel de llenado y cuenta de unidades Como ventajas, en este tipo de sensores, podemos destacar que: • Detectan todo tipo de elementos metálicos, además de que pueden “ver” a través de algunos materiales. • Disponen de muchas configuraciones de instalación. • Vida útil bastante larga. Como desventajas destacar: • Tienen una distancia de detección corta que varía según el material que deban detectar. • Extremadamente sensibles a los factores ambientales. • Deben estar bajo un cierto control ya que los sensores capacitivos no son selectivos en cuando a los objetos que deben detectar. 2.1.3 Sensores capacitivos en aplicaciones médicas Una vez planteadas las diferentes aplicaciones que los sensores capacitivos tienen en los sectores industriales, procedemos a comentar los estudios y desarrollos más relevantes que se han realizado mediante sensores capacitivos en aplicaciones médicas. La importancia de utilizar sensores fiables, económicos y con alto rendimiento para terapias médicas no invasivas es cada vez mayor, porque la tendencia prevé un aumento significativo del seguimiento y control de los pacientes desde su domicilio familiar [19]. Una de las aplicaciones con sensores capacitivos que han sido realizadas con éxito, son en procesos de monitorización de la presión intraocular [20], [21] y presión intracraneal [22]. Las mediciones de presión, son las actividades donde más se utilizaron los sensores capacitivos en aplicaciones médicas, aunque existen otros proyectos relevantes utilizando sistemas capacitivos en el ámbito médico. Un ejemplo son los “acelerómetros”, instrumentos que se usan para medir la inclinación de segmentos corporales y la actividad física en la vida diaria de pacientes en rehabilitación [23]. En estos dispositivos, el uso de la capacitancia para medir el desplazamiento mejora significativamente la sensibilidad. Otro uso de los sensores capacitivos ha sido el diagnóstico de enfermedades pulmonares a partir de mediciones de humedad (sensores de humedad). En este tipo de dispositivos, una capa químicamente absorbente, normalmente un polímero, se coloca entre los electrodos paralelos de un capacitador. De este modo, la humedad se detecta como un cambio en la capacitancia, debido a la variación de la constante dieléctrica al ser absorbidas las moléculas de agua en el polímero [16]. En una configuración similar a la anterior se utiliza entre los electrodos del sensor capacitivo hidrogel, con el objeto de medir los analitos corporales a partir de la variación de capacitancia que ocurre debido a la hinchazón del polímero [16]. La tecnología de obtención de imágenes por ultrasonidos ha sido experimentada observando las ventajas de los sensores capacitivos para los propósitos de transmisión y detección [17]. Para la transmisión, las membranas de los dispositivos capacitivos son accionadas en vibración por la fuerza electrostática ejercida entre los electrodos que forman el dispositivo de ultrasonidos. Para la recepción, la vibración de las membranas se produce por excitación de una onda acústica, que es convertida por el dispositivo capacitivo en la señal eléctrica. Una de las aplicaciones más relevantes con respecto a nuestro proyecto sería la utilización de sensores capacitivos para monitorizar el ritmo respiratorio en tiempo real. Carey R. Merritt, H. Troy Nagle [18], han diseñado y fabricado un cinturón ubicado en el abdomen el cual consigue medir la tasa del ritmo respiratorio de forma eficiente mediante un circuito capacitivo diferencial con apantallamiento (ver figura 3). Fig.3 Circuito capacitivo diferencial con apantallamiento [18] Como resultados relevantes de este trabajo cabe destacar que el diseño del circuito es lineal con suficiente resolución para medir una amplia gama de respiración normal y respiración profunda. El sensor fue diseñado para ser extremadamente resistente a las no linealidades producidas por perturbaciones externas. En la figura 4 podemos observar el prototipo experimental del sistema capacitivo con el cual se obtuvieron los resultados comentados. Fig.4 Ejemplo prototipo sensor capacitivo diferencial, en correa para el pecho o abdomen [18] Los estudios realizados demuestran que el uso en aplicaciones médicas de sensores capacitivos, está aumentando progresivamente debido a las ventajas que presentan: pequeño tamaño, elevada sensibilidad, económicos y reducido consumo energético. 2.1.4 Sensor capacitivo basado en oscilador Dentro de los sensores capacitivos, una tecnología de sensorización muy extendida son los sensores capacitivos basados en oscilador. Este tipo de sensores generan una señal sinusoidal, cuya frecuencia es impuesta por la bobina y el condensador utilizados en el oscilador. En este tipo de sensores capacitivos, la frecuencia de oscilación es empleada como parámetro para determinar el valor de la capacidad a medir. Las ventajas de los sensores capacitivos basados en osciladores son: - Poseen una sensibilidad en frecuencia elevada frente a variaciones en la capacidad a medir. - Estable en frecuencia ante fenómenos como vibraciones, cambios de temperatura, cambios en la tensión de alimentación, etc. Como se puede observar en la figura 5, se presenta un esquema general del sensor capacitivo basado en osciladores. Sensor Capacitivo Oscilador Capacidad medida Electrodos Dieléctrico Fig.5 Esquema general sensor capacitivo Las diferentes partes en las que se descompone un sensor capacitivo con oscilador se pueden ver de forma esquematizada en la figura 5. Éste se encuentra formado por los siguientes elementos: El oscilador: Circuito electrónico que genera una señal de media-alta frecuencia (KHz-MHz), utilizando componentes activos (transistor, operacional) y una red resonante (bobina, condensador) (ver figura 6). Fig.6 Esquema componentes oscilador y resistencia de carga (RL) Este circuito permite obtener señales de corriente alterna a partir de una fuente de baja frecuencia o corriente continua. Una de las características más relevantes para la sensibilidad del sensor diseñado, consiste en obtener variaciones considerables en la frecuencia de trabajo, empleando pequeños cambios en la capacidad producida en los electrodos. Esa particularidad la proporcionan los osciladores por medio de su red resonante. Capacidad medida: La capacidad medida consta de 2 partes claramente diferenciadas, los electrodos y el dieléctrico presente entre los mismos. Dichos elementos son elementales para determinar la sensibilidad del sensor y sus posibles aplicaciones. Se realizará una definición de cada una de las partes: - Electrodos: Son varias placas metálicas con una forma geométrica y tamaño determinado, conectados a la salida del oscilador. Su influencia en la “capacidad de medida”, depende de la señal alterna emitida por el oscilador y su función es crear un condensador entre las placas metálicas. - Dieléctrico: Un dieléctrico o aislante es un material que evita el paso de la corriente, y su función es aumentar la capacitancia del condensador formado. Los diferentes materiales que se utilizan como dieléctricos tienen diferentes grados de permitividad (diferente capacidad para el establecimiento de un campo eléctrico). En nuestro caso tendremos dos dieléctricos, el aire y el cuerpo humano (piel, líquidos, etc), que producirán una modificación en el valor del condensador. 2.2 Osciladores Los sensores capacitivos basados en osciladores poseen un elemento crítico, “el oscilador”, el cual es el encargado de generar la señal senoidal, y su correcto funcionamiento será pieza clave para la eficacia y sensibilidad del propio sensor. Presentamos en este capítulo un análisis detallado de los posibles osciladores existentes y describiremos sus características principales. 2.2.1 Introducción Se entiende por oscilador a una etapa electrónica que, siendo alimentada con una tensión continua, proporciona una salida periódica, que puede ser aproximadamente sinusoidal, cuadrada, diente de sierra, triangular, etc. Es decir, la esencia del oscilador es “crear” una señal periódica por sí mismo, sin que haya que aplicarle señal alguna a la entrada. Los osciladores de onda senoidal son un circuito que, mediante amplificación y realimentación, generan una onda sinusoidal. Su elemento activo es, normalmente, un transistor único, un FET, un bipolar o un integrado, y la frecuencia de operación se determina con un circuito sintonizado o un cristal piezoeléctrico en la trayectoria de realimentación. La estructura básica de un oscilador sinusoidal, como se representa esquemáticamente en la figura 7, está formada por un amplificador de ganancia ‘a’ y una red de realimentación positiva ‘β’ que determina la frecuencia de las oscilaciones generadas en ausencia de excitación externa. Figura 7. Estructura básica de realimentación para lograr oscilación Así, la ganancia a´ del amplificador realimentado que constituye la estructura básica del oscilador armónico, será, según el criterio de Barkhausen, Ecuación 2.1 Ganancia de un amplificador realimentado con lo que, si a una determinada frecuencia W0 la ganancia de lazo aβ es igual a la unidad, el valor de la ganancia a´ será infinito. Por tanto, en ausencia de excitación externa, cualquier perturbación que se produzca en el circuito como consecuencia, por ejemplo, del ruido electrónico que inevitablemente está presente en todos los sistemas electrónicos con diferentes componentes de frecuencia, hará que en la salida se obtenga una señal sinusoidal cuya frecuencia W 0 estará determinada por la red de realimentación positiva selectiva en frecuencia, y para la que a(jW 0)β(jW 0)=1, como se representa en la figura 8. Figura 8. Ejemplo ilustrativo del funcionamiento del oscilador sin señal de entrada El criterio de Barkhausen exige que la rotación de fase total de la señal realimentada sea de 360º y éste será el factor fundamental en la determinación de la frecuencia de oscilación. Además, la ganancia del amplificador ha de ser suficientemente grande para asegurar que el producto aβ sea igual a la unidad a fin de que se mantengan las oscilaciones. En consecuencia, la amplitud estacionaria es tal que el valor absoluto de la ganancia sea 1/β. Como la red de realimentación es casi siempre un circuito pasivo, la amplitud dependerá principalmente de las características del amplificador. Existen muchos tipos de circuitos osciladores. Algunos de los factores que entran en la elección de un circuito incluyen: - Frecuencia de operación - Amplitud o potencia de salida - Estabilidad de la frecuencia - Estabilidad en amplitud - Pureza de la forma de onda de salida - Arranque seguro - Rendimiento - La posibilidad de que ocurran modos de oscilación indeseables, etc. Una vez estudiadas las características específicas para la elección del oscilador más adecuado, hemos optado por los osciladores de radiofrecuencia como respuesta a los requisitos propuestos al comienzo del proyecto. A continuación se realiza una descripción de las características de los osciladores de radiofrecuencia más comunes, los cuales son: - Osciladores Pierce, a cuarzo o cerámicos - Osciladores LC : Hartley, Colpitts, Clapp - Osciladores por frecuencia sintetizada 2.2.3 Los osciladores Pierce Circuitos de oscilador de cristal Aunque hay muchas configuraciones distintas para los osciladores utilizando cristales, las más comunes son el discreto, el de Pierce de circuito integrado (IC) y el medio puente de RLC. Cuando sea necesaria muy buena estabilidad en la frecuencia y circuitos razonablemente sencillos, el Pierce discreto es una buena opción. Cuando la principal preocupación es el bajo costo y la capacidad de una interface digital sencilla, será suficiente con un oscilador Pierce utilizando un circuito integrado. Sin embargo, para la mejor estabilidad de la frecuencia, el medio puente RLC es la mejor opción. Oscilador discreto de Pierce Su frecuencia de operación abarca el rango de aplicación de los cristales (desde 1 kHz a aproximadamente 30 MHz). Utiliza circuitos relativamente sencillos que requieren de pocos componentes (la mayoría de las versiones de frecuencia media necesitan solamente un transistor). El diseño del oscilador Pierce desarrolla una alta potencia de la señal de salida mientras que disipan poca potencia en el mismo cristal. Por último, la estabilidad de frecuencia a corto plazo en el oscilador de cristal Pierce es excelente (esto se debe a que en el circuito de entrada de carga Q es casi tan alta como la Q interna del cristal). La principal desventaja del oscilador Pierce es que requiere de un amplificador de alta ganancia (aproximadamente 70). En consecuencia, tiene que utilizarse un solo transistor de alta ganancia o un amplificador de etapas múltiples. Fig.9 Oscilador de cristal discreto de Pierce La figura 9 muestra un circuito para un oscilador discreto de Pierce de 1 MHz. Q1 proporciona toda la ganancia necesaria para que ocurran oscilaciones autosuficientes. R1 y C1 proporcionan un atraso en fase de 65° a la señal de retroalimentación. La impedancia del cristal es básicamente resistiva con un pequeño componente inductivo. Esta impedancia combinada con la reactancia de C2 proporciona 115° adicionales de atraso en fase. El transistor invierte la señal (cambio de fase de 180°), proporcionándole al circuito los 360° necesarios para el cambio de fase total. Debido a que la carga del cristal es principalmente no resistiva (en su mayor parte la combinación en serie de C1 y C2), este tipo de oscilador proporciona muy buena estabilidad en frecuencia a corto plazo. Desdichadamente, C1 y C2 introducen pérdidas sustanciales y, por consecuencia, el transistor tiene que tener una ganancia de voltaje relativamente alta, siendo ésta su principal desventaja. Por otro lado, dadas las condiciones de diseño del presente proyecto, y como ya se mencionó en el apartado anterior, la dificultad para conseguir osciladores de frecuencia variable, hace que descartemos el oscilador Pierce como recomendable para nuestra aplicación, la necesidad de obtener un margen amplio en frecuencia donde el sensor capacitivo pueda operar limita la elección del oscilador adecuado. Oscilador Pierce de circuitos integrados La figura 10 muestra un oscilador de cristal Pierce utilizando IC. Para asegurar que empiecen las oscilaciones, se invierte la entrada y salida del amplificador A1 para una operación de clase A. A2 convierte la salida de A1 a una oscilación completa del punto de corte a saturación, reduciendo los tiempos de crecimiento y descarga así como el búfer de la salida de A1. La resistencia de salida de A1 se combina con C1 para proporcionar el atraso de fase necesario de RC. Las versiones de CMOS (semiconductor metálico-óxido complementario) operan hasta aproximadamente 2 MHz, y las versiones de ECL (lógica acoplada al emisor) operan hasta 20 MHz. Fig. 10 Oscilador de cristal de IC de Pierce Módulo del oscilador de cristal Un módulo para oscilador de cristal consiste de un oscilador controlado de cristal y de un componente de voltaje variable como un diodo varactor. Todo el circuito del oscilador se encuentra dentro de una sola caja de metal. Se muestra en la figura 11, un diagrama esquemático simplificado de un módulo para oscilador de cristal Colpitts. X1 es en sí un cristal y Q1 es el componente activo para el amplificador. C1 es un capacitor derivador (trimmer) que permite variar la frecuencia oscilatoria del cristal dentro de un rango reducido de frecuencias de operación. VC1 es un capacitor variable de voltaje (varicap o diodo varactor). Fig. 11 Módulo de oscilador de cristal: diagrama esquemático y circuito de compensación Un diodo varactor es un diodo cuya capacitancia interna mejora cuando se invierte la polarización, y al variar el voltaje de polarización inversa, se puede ajustar la capacitancia del diodo. Un diodo varactor tiene una capa especial de deflexión (agotamiento) entre los materiales de tipo p y n y se construye con varios grados y tipos de material dopado (contaminado) (el término de unión graduada se utiliza frecuentemente al explicar la fabricación del diodo varactor). Se puede aproximar la capacitancia de un diodo varactor como se muestra en la ecuación 4. Ec. 4 Aproximación capacitancia diodo varactor Donde C=la capacitancia del diodo con polarización inversa de 0V |Vr| =magnitud del voltaje de polarización inversa del diodo Cd=capacitancia del diodo con polarización inversa La frecuencia a la que oscila el cristal se puede ajustar ligeramente cambiando la capacitancia de VC1 (o sea, cambiando el valor del voltaje de polarización inversa) El diodo varactor, en conjunción con un módulo para compensar la temperatura, proporciona una compensación instantánea de la frecuencia a las variaciones causadas por cambios en la temperatura. El diagrama esquemático de un módulo para compensar la temperatura se muestra en la figura 11. El módulo de compensación incluye un amplificador de búfer (Q1) y una red compensadora de temperatura (T1), T1 es un termistor de coeficiente de temperatura negativo. Cuando la temperatura cae por abajo del valor del umbral del termistor, se incrementa el voltaje de compensación. El voltaje de compensación se aplica al módulo del oscilador, donde controla la capacitancia del diodo varactor. Finalmente se describen las ventajas e inconvenientes del oscilador Pierce. Estos osciladores utilizan un cristal de cuarzo, el cual una vez en resonancia confiere al circuito una gran estabilidad en frecuencia, pero exactamente por ese motivo es difícil obtener osciladores de frecuencia variable, este motivo hace que no sea el oscilador más recomendable para nuestra aplicación porque necesitamos tener un margen amplio de frecuencia donde el sensor capacitivo pueda operar correctamente, ya que la frecuencia de trabajo del oscilador variará dependiendo de la persona que tenga conectado nuestro dispositivo, la distancia que exista entre los electrodos y tierra, etc. Cuando el oscilador Pierce usa un componente cerámico en vez de un cristal de cuarzo, se mejora el rango de frecuencia donde puede operar el oscilador, pero se consigue a costa de la estabilidad en frecuencia. Otra problemática que poseen es que son muy sensibles a la temperatura ambiental. 2.2.3 Osciladores de frecuencia sintetizada Como se vio los osciladores LC y los osciladores controlados por cristal, presentan ventajas y desventajas, en el primero la ventaja es la posibilidad de variabilidad en la frecuencia de salida, la desventaja es la pobre estabilidad en frecuencia; en el segundo la ventaja radica en la estabilidad en frecuencia y la desventaja radica en la no variabilidad de la frecuencia de salida. La síntesis de frecuencia consiste en la generación de una señal de frecuencia variable, utilizando para esto dos o más osciladores interconectados de forma conveniente. La variación de frecuencia que se obtiene es discreta, pudiendo hacerse los saltos tan pequeños como se desee, el sintetizador debe ser capaz de producir tantas frecuencias como sea posible, pudiendo llegar a miles o millones según la necesidad. La síntesis de frecuencia puede hacerse de dos formas: una llamada Síntesis Directa y la otra llamada Síntesis Indirecta. Síntesis Directa La síntesis de frecuencia Directa consiste en efectuar con una o más señales de frecuencia estable, operaciones matemáticas (sumas, restas, multiplicaciones y divisiones) a fin de obtener en la salida una señal cuya frecuencia sea la deseada. Este método tiene la ventaja de que si el oscilador base es un oscilador muy estable, también lo serán las distintas frecuencias de salida. Este tipo de síntesis fue el que primero se utilizó y no se utiliza en la actualidad debido a su gran complejidad, se debe realizar gran número de operaciones, requiere gran número de bloques, entre ellos filtros muy complejos, resultando esto en un costo elevado. La ventaja es que permite obtener una resolución muy fina, dependiendo esto del uso que se le dará. Un ejemplo de sintetizador directo simple que utiliza un oscilador controlado por cristal se puede ver en la figura 12. Fig. 12 sintetizador directo con oscilador controlado por cristal Como se puede observar en la figura 12 se utilizan dos osciladores con una serie de cristales intercambiables cada uno, la frecuencia de oscilación a la salida de estos dos osciladores se aplica a un mezclador balanceado. La salida del mezclador contiene la componente suma y resta de las dos frecuencias de entrada, mediante el uso de un filtro se selecciona la suma o la diferencia, obteniéndose el valor de frecuencia deseada. Otra alternativa sería utilizar un solo oscilador patrón y a partir de operaciones de suma, resta, multiplicación y división obtener la frecuencia de salida deseada, en la figura 13 se puede observar un ejemplo de lo comentado. Fig. 13 Ejemplo con sólo un oscilador patrón Síntesis de frecuencia Indirecta – PLL Circuitos de fase fija Los circuitos de fase fija son de gran uso en los sistemas de comunicaciones, cumpliendo distintas funciones tales como: Generación de frecuencias, Modulación, Demodulación, etc. Se utilizan en etapas receptoras y transmisoras, ya sea para modulación analógica o digital. Con el avance de la tecnología en la actualidad se dispone de gran número de Circuitos Integrados y módulos que permiten realizar circuitos de fase fija de pequeño tamaño, gran confiabilidad y bajo costo. En los últimos años los PLL adquirieron gran desarrollo, los que por su simplicidad y costo han visto generalizado su uso, en la actualidad es el método mas popular en la generación sintetizada de frecuencias. Este circuito nos permite, mediante una señal generada internamente (referencia), controlar un lazo o bucle (PLL) y obtener en la salida una señal cuya estabilidad en frecuencia depende de la estabilidad de la señal de control o referencia. Esa señal (de frecuencia determinada), normalmente proviene de osciladores a cristal, que permiten obtener gran estabilidad en frecuencia. Otra característica importante del bucle de fase fija, radica en que además de la estabilidad en frecuencia nos permite obtener una variación discreta de la frecuencia de salida (por saltos), donde el rango de frecuencias y la resolución dependen de la red divisora y del valor de la frecuencia de referencia que ingrese al comparador de fase, este compara las fases de estas dos señales de entrada y en su salida entrega una tensión cuyo valor es proporcional a la diferencia de fase, esa tensión se utiliza para atacar al oscilador controlado por tensión, tendiendo a corregir su frecuencia de oscilación. Análisis de un PLL: Básicamente un PLL es un sistema de control realimentado donde la señal de realimentación es una frecuencia en lugar de una tensión. Cuando la señal de salida requerida es la frecuencia del Vco, el resultado es la obtención de una señal de frecuencia variable con una gran estabilidad. En otras aplicaciones a este circuito se lo utiliza como demodulador de frecuencia, en este caso la señal de salida será una muestra de la tensión de control que ataca al Vco. Análisis de un PLL como Oscilador: El diagrama en bloques básico de un PLL a utilizar como oscilador sintetizado de frecuencia, se puede ver en la figura 14. Fig. 14 El diagrama en bloques básico de un PLL a utilizar como oscilador sintetizado de frecuencia La modificación en la frecuencia de salida se obtiene mediante el circuito divisor de frecuencia por N preferentemente programable. Este divisor a partir de la señal de entrada proveniente del Vco, entrega en la salida una señal de baja frecuencia comparable con la frecuencia de referencia, esto es fc = fo / n donde es fo la frecuencia de salida del Vco. Cuando se produce en enganche o bloqueo del PLL será: fc = fref y fo = nfref Al ser la fo = n fref significa que la frecuencia de salida es un número entero de la frecuencia de referencia, por lo que el salto mínimo en la frecuencia de salida resulta ser igual al valor de la Fref. Generalmente las señales de referencia que se utilizan son de baja frecuencia y dependen del tipo de servicio al que se aplicará el PLL, algunos valores utilizados pueden ser por ejemplo 1 Khz, 5 Khz, 10 Khz, 25 Khz, etc. Finalmente se describen las principales ventajas e inconvenientes de los osciladores de frecuencia sintetizada. Estos osciladores de frecuencia sintetizada son muy utilizados en sistemas de comunicaciones, poseen una estabilidad en frecuencia muy elevada, pero nuestra aplicación necesita un margen de frecuencia de trabajo amplio y un oscilador que permita variaciones significativas de la frecuencia con respecto a una capacidad externa. Los osciladores de frecuencia sintetizada no están diseñados para tal fin y por lo tanto poseen una sensibilidad frente a la capacidad de medida inferior al oscilador LC y permiten márgenes de frecuencia de trabajo más reducidos. Por ello consideremos que no sería la opción adecuada para nuestro diseño. 2.2.4 Osciladores LC Los osciladores LC son circuitos que utilizan un circuito tanque LC para las componentes que determinan la frecuencia. La operación del circuito tanque involucra un intercambio de energía entre cinética y potencial. La figura 15 ilustra la operación del circuito tanque LC. Como se muestra en la figura 15a, una vez que la corriente se inyecta en el circuito (instante t1), se intercambia la energía entre el inductor y el capacitor, produciendo el voltaje de salida de corriente alterna correspondiente (por tiempos t2 a t4). La forma de onda de voltaje de salida se muestra en la figura 15b. Figura 15 Circuito tanque LC: (a) acción del oscilador y efecto del volante; (b) Forma de onda de salida La frecuencia de operación de un circuito tanque LC es simplemente la frecuencia de resonancia de la red LC en paralelo y el ancho de banda es una función del factor de calidad Q del circuito. Matemáticamente, la frecuencia de resonancia de un circuito tanque LC con Q = 10 se le puede aproximar por, la ecuación 5. Ec. 5 Ecuación frecuencia de resonancia A continuación se realizará un estudio detallado de los osciladores LC más utilizados, donde se evaluarán las ventajas e inconvenientes de cada uno de ellos. Oscilador Hartley La figura 16 muestra el diagrama esquemático de un oscilador Hartley. El amplificador transistorizado (Q1) proporciona la amplificación necesaria para una ganancia de voltaje de lazo unitaria a frecuencia de resonancia. El capacitor de acoplamiento (Cc) proporciona la ruta para la retroalimentación regenerativa. L1 y C1, son los componentes que determinan la frecuencia, y Vcc es la fuente de voltaje de c.c. Fig. 16 Oscilador Hartley La figura 17(a) muestra el circuito equivalente en c.c. para el oscilador Hartley. Cc es un capacitor de bloqueo que aísla el voltaje de polarización de base de c.c. y evita que haga un corto a tierra a través de L1b. C2 también es un capacitor de bloqueo para evitar que la fuente de voltaje del colector haga corto a tierra a través de L1a. El choque de radiofrecuencia (RFC) es un corto en c.c. La figura 17(b) muestra el circuito equivalente de ca para el oscilador Hartley. Cc es un capacitor de acoplamiento de ca y proporciona una ruta de retroalimentación positiva del circuito tanque a la base de Q1. C2 acopla las señales de ca del colector de Q1 al circuito tanque. El RFC presenta un circuito abierto en ca, en consecuencia aislando la fuente de c.c. de las oscilaciones en ca. Oscilador Hartley opera: En el arranque inicial, aparece una multitud de frecuencias en el colector de Q1 y se acoplan a través de C2 dentro del circuito tanque. El ruido inicial proporciona la energía necesaria para cargar C1. Una vez que se ha cargado parcialmente C1 empieza la acción del oscilador. El circuito tanque solamente oscilará de manera eficiente en su frecuencia de resonancia. Una porción del voltaje del circuito tanque oscilante se deja caer a través de L1b y se retroalimenta nuevamente a la base de Q1 donde se amplifica. La señal amplificada aparece en el colector 180° fuera de fase con la señal de base. Se realiza un desplazamiento adicional de fase de 180° a través L1; en consecuencia, la señal que se retroalimenta nuevamente a la base de Q1 se amplifica y se desplaza en fase a 360°. Por lo tanto, el circuito es regenerativo y mantendrá las oscilaciones sin señal de entrada externa. La proporción de energía oscilatoria que se retroalimenta a la base de Q1 se determina por la razón de L1b a la inducción total (L1a + L1b) Si se retroalimenta insuficiente energía, las oscilaciones se amortiguan. Si se retroalimenta energía en exceso, el transistor se satura. Por lo tanto, la posición de L1 se ajusta hasta que la cantidad de energía de retroalimentación sea exactamente la requerida para una ganancia de voltaje de lazo unitario manteniéndose las oscilaciones. Fig. 17.a Circuito equivalente en cd Fig.17.b Circuito equivalente en ca La ecuación 6 muestra una aproximación cercana para la frecuencia de oscilación del oscilador Hartley. Ec. 6 Frecuencia de oscilación oscilador Hartley Oscilador Colpitts La figura 18(a) muestra el diagrama esquemático de un oscilador Colpitts. La operación de un oscilador Colpitts es muy similar a la de Hartley excepto que un divisor capacitivo se utiliza en lugar de una bobina con un punto intermedio variable. Q1 proporciona la amplificación, Cc proporciona la ruta para la retroalimentación regenerativa, L1, C1a y C1b son los componentes para determinar la frecuencia, y Vcc es la fuente de voltaje de c.c. La figura 18(b) muestra el circuito equivalente para el oscilador Colpitts. C2 es el capacitor de bloqueo que evita que aparezca la fuente de voltaje de colector en la salida. El RFC es nuevamente un corto en c.c. La figura 18(c) muestra el circuito equivalente de c.a. para el oscilador Colpitts. Cc es un capacitor de acoplamiento en c.a. y proporciona la ruta de retroalimentación regenerativa del circuito tanque a la base de Q1. El RFC está abierto en c.a. y desacopla las oscilaciones a partir de la fuente de voltaje en c.c.. La operación del oscilador Colpitts es casi idéntica a la del oscilador Hartley. En el arranque inicial, aparece ruido en el colector de Q1 y suministra energía al circuito tanque, haciendo que empiece a oscilar. C1a y C1b constituyen un divisor de voltaje en c.a.. El voltaje que se deja caer a través de C1b se retroalimenta a la base de Q1 hasta Cc. Hay un cambio de fase de 180° de la base al colector de Q1 y un cambio de fase adicional de 180° a través de C1. En consecuencia, el cambio total de fase es de 360° y la señal de retroalimentación es regenerativa. La relación de C1a a C1a + C1b determina la amplitud de la señal de retroalimentación. Figura 18 Oscilador Colpitts : (a) diagrama esquemático; (b) circuito equivalente en c.c.; (c) circuito equivalente en ca La ecuación 7 muestra una aproximación cercana para la frecuencia de oscilación del oscilador Colpitts. Ec. 7 Frecuencia de oscilación oscilador Colpitts 2.2.4 Estabilidad de frecuencia de oscilación En el diseño de circuitos osciladores son importantes, además de la frecuencia y la forma de onda de las oscilaciones, la estabilidad de frecuencia de oscilación. La estabilidad de frecuencia es la habilidad de un oscilador para permanecer a una frecuencia fija. La estabilidad de frecuencia a menudo se considera de corto o largo tiempo. La estabilidad de corto plazo se ve afectada principalmente por las fluctuaciones en los voltajes de operación de c.c., mientras que la estabilidad a largo plazo es una función de la edad de los componentes y los cambios de temperatura así como la humedad del ambiente. En los osciladores de circuito tanque LC discutidos anteriormente, los factores de calidad Q son relativamente bajos, permitiendo que el circuito tanque resonante oscile sobre una amplia gama de frecuencias. La estabilidad de frecuencia se da generalmente como un porcentaje de cambio en frecuencia (tolerancia) del valor deseado. Por ejemplo, un oscilador operando a 100 kHz con una estabilidad de ±5% operará a una frecuencia de 100 kHz ± 5 kHz o entre 95 y 105 kHz. Varios factores afectan la estabilidad de un oscilador. Los más obvios son aquellos que afectan directamente el valor de los componentes para determinar la frecuencia. Estos incluyen cambios en valores de la inductancia, capacitancia y resistencia debido a variaciones ambientales en temperatura, humedad y los cambios en el punto de operación de los transistores. Las fuentes de c.c. con voltajes de lazo en c.a. también afectan a la estabilidad. La estabilidad de frecuencia en los osciladores RC o LC puede mejorarse enormemente regulando la fuente de c.c. y minimizando las variaciones ambientales. También pueden utilizarse componentes especiales independientes de la temperatura. 2.3 Elección de circuito oscilador para experimentación En este tipo de circuitos osciladores, los cambios en la capacidad del circuito tanque provocan que la frecuencia de oscilación se modifique, ya que la frecuencia depende directamente de los valores de bobina y capacidad, como podemos observar en la ecuación 8. Ec. 8 Frecuencia de oscilación oscilador Colpitts Nuestro objetivo será el diseño e implementación de un circuito oscilador que minimice las capacidades parásitas generadas por el propio circuito y sus electrodos, y permita una medida realista de la capacidad producida entre los electrodos y el cuerpo humano con una sensibilidad en el cambio de capacidad elevada. Joon Ho Oum et al. [24] utilizaron un esquema basado en el oscilador de Colpitts para la medida del ritmo respiratorio. En la figura 18, se puede observar la estructura general del circuito sensor. Dicho esquema ha sido seleccionado como base para el desarrollo del sensor capacitivo, porque cumplía varios de los requisitos que proponíamos al comienzo del proyecto, como son diseño electrónico sencillo, de bajo coste y con bastante sensibilidad. Fig.19 Estructura de sensor medidor ritmo respiratorio [24] El diseño base que se presenta en la figura 19 consta de 5 partes diferenciadas: - Oscilador Colpitts - Etapa de filtrado - Amplificador - Acondicionamiento de señal de salida - Diseño de electrodos En dicho trabajo se realiza un análisis teórico de la sensibilidad máxima que se puede obtener. Las gráficas muestran una correcta medida de la señal de ritmo respiratorio (ver figura 20). Fig.20 Resultados obtenidos. Gráfica (a) valores registrados por el sensor. Figura (b) datos registrados por un dispositivo hospitalario. Como podemos observar en los resultados de la figura 20, consiguieron medir el ritmo respiratorio con una resolución aceptable. Se observaron una serie de posibles mejoras en el diseño propuesto por dichos autores, los cuales, en un principio proporcionarían una medida del ritmo respiratorio con mayor sensibilidad y bajo condiciones más adversas. Estas optimizaciones serán expuestas en posteriores apartados. Un esquema general del diseño propuesto es mostrado en la figura 21. Etapa 1 Etapa 3 Etapa 4 Etapa 3 Fig.21 Esquema general sensor capacitivo propuesto En los siguientes apartados se realizará una descripción detallada de los avances significativos realizados en el sensor propuesto en la memoria del proyecto, con el fin de mejorar los resultados experimentales presentados en el artículo de referencia [24]. No se han incluido detalles de los circuitos implementados tales como esquemáticos o diseños en placas de circuito impreso ya que es un material sensible de cara a la explotación industrial de los desarrollos realizados. Se presenta a continuación una explicación detallada de cada una de las etapas que han dado lugar al diseño del sensor capacitivo. 2.3.1 Etapa 1 (Diseño optimizado del oscilador) Consideramos el diseño del oscilador una de las parte críticas en el sensor capacitivo, por ello realizaremos un análisis detallado de las mejoras propuestas y abordaremos los principales parámetros que permiten caracterizar el comportamiento de un oscilador de estas características. La figura 22 muestra el esquema del oscilador Colpitts en base común empleado para el diseño propuesto. Fig.22 Esquema general oscilador Colpitts Como puede verse en el esquema de la figura 22, el circuito tanque está constituido por la autoinducción Lt y las capacidades C1 y C2. La capacidad Cf es la capacidad producida por los electrodos situados en el cuerpo humano. La resistencia Re es una resistencia pequeña que se introduce para evitar que el comportamiento del oscilador dependa de la impedancia de entrada del transistor (a la que llamaremos re). La resistencia de carga es RL, que está conectada al colector a través del condensador de desacoplo CC. Las resistencias R1, R2 y RE se utilizan para polarizar el circuito y no afectan en pequeña señal por utilizar el condensador de base CB y la bobina choque de radiofrecuencia RFC. En la figura 23, se muestra el circuito equivalente para señal variable, donde se ha incluido la resistencia parásita rc asociada a la bobina del circuito tanque, la impedancia de entrada del transistor re y la capacidad de la unión colector-base Ccb. Fig.23 Circuito equivalente para señal variable Este circuito se puede simplificar sucesivamente teniendo en cuenta las reglas de transformación serie-paralelo para circuitos RL y RC. Podemos decir que Rp es la resistencia resultante de transformar rc a su equivalente paralelo; Rs y Cs resultan de transformar el circuito oscilador formado por C1, C2 y Ri = (Re + re); finalmente,R0 = RL || Rp || Rs y Ct = Ccb || Cs. Las capacidades de desacoplo CB y CC se deben escoger de modo que se comporten como cortocircuitos efectivos a la frecuencia de oscilación. Igualmente, el choque de radio frecuencia debe elegirse para que se comporte como un circuito abierto a la frecuencia de oscilación. Los valores de las resistencias de polarización RE, R1 y R2 se establecen teniendo en cuenta el punto de polarización del circuito como podemos observar en la figura 24. Fig. 24 Recta de carga estática para polarización de transistor La recta de carga de un transistor, refleja todos los posibles puntos de funcionamiento que pueden darse para unos valores determinados de Rc (resistencia de colector) y Vcc (tensión de alimentación). En un transistor que forma parte de un circuito, la recta de carga muestra la relación entre la tensión colector-emisor (VCE), la corriente de colector (IC) y la corriente de base (IB). En la figura 24, los puntos P1 y P2 delimitan la recta de carga. Se denomina punto de trabajo o de reposo (Q) de un transistor, en nuestra representación P3, a un punto de la recta de carga que determina el valor de la tensión de colector-emisor (VCE) y de las corrientes de colector y base (IC y IB), en cualquier transistor que forme parte de un circuito. La posición del punto de trabajo o de reposo del transistor depende de las tensiones y circuitos de polarización empleados. El punto de trabajo de un transistor en un circuito variará cuando cambie alguno de los elementos de los que depende. Estos elementos pueden ser bien internos al propio dispositivo (tensiones o corrientes, características), bien externos, como alimentaciones, etc. por ejemplo variaciones en las resistencias, Normalmente, el diseño de un oscilador viene condicionado por las especificaciones (en las que se suele indicar la frecuencia de oscilación y la potencia que debe suministrarse a una determinada resistencia de carga) además de los componentes disponibles. Pero en nuestro caso el diseño del oscilador viene determinado por la capacidad Cf propuesta, el factor de calidad Q que pretendemos asegurar y la potencia máxima suministrada en la carga. La capacidad Cf, que está formada por los dos electrodos, los cuales en una primera aproximación estarían conectados entre el pecho y la espalda, es muy similar a la capacidad producida por el cuerpo humano, por ello como referencia utilizamos como datos iniciales dicha capacidad, después de una búsqueda bibliográfica sobre numerosos experimentos con la idea de obtener la capacidad del cuerpo humano, pudimos determinar que los estudios no aclaraban un valor exacto de capacidad en cuerpo, algunos de los artículos comentan que podría estar alrededor de los 150pF [25]-[26]-[27], un valor que tomamos como referencia. Para el análisis de la potencia suministrada en la carga, conviene diseñar el oscilador para condiciones de máxima transferencia a la carga, lo que supone que R0 debe ser igual a la mitad de RL. Por otra parte, la potencia suministrada a la resistencia R0 a la frecuencia de oscilación es: Ec. 9 Potencia suministrada en la carga donde ICQ es la corriente de colector de polarización. Podemos aproximar que la mitad es disipada por la resistencia de carga y el resto por las resistencias rc y (Re +re), suponiendo que se cumplen las condiciones de máxima transferencia de potencia. La potencia suministrada a la carga es, por tanto: permite establecer la corriente de polarización del transistor: así como la tensión colector-base de polarización: Con respecto al circuito tanque, se debe tener en cuenta, por una parte, la frecuencia de resonancia (que va a determinar la frecuencia de oscilación): El factor de calidad de la ganancia en lazo abierto responde a la siguiente expresión: Ec. 10 Factor de calidad de la ganancia en lazo abierto El factor de calidad es un parámetro clave para reducir el ruido en el oscilador. Se podría decir que cuanto mayor sea el factor de calidad “Q” de su ganancia en lazo abierto, menor será el ruido del oscilador. Como podemos observar en la figura 25. Ruido Ruido Ruido Ruido Fig.25 Módulo y fase de la ganancia de lazo y densidad espectral de la tensión de salida del oscilador para (a) Q = 1 y (b) Q = 10. El módulo y la fase de la ganancia de lazo abierto se han representado en la figura 25, para dos valores distintos de Q (1 y 10), junto con el espectro de salida que corresponde al oscilador en cada caso. El ruido, que se produce en el área bajo toda la curva excepto en ωo, es mucho menor si Q = 10. 2.3.2 Etapa 2 (Diseño de los electrodos) En esta etapa, se describen las diversas configuraciones empleadas en el estudio del efecto de los electrodos: tamaño de los electrodos, forma geométrica, material, posición y número de electrodos empleados. En el esquema propuesto para la monitorización del ritmo respiratorio, figura 21, se ha considerado disponer sobre una cama un par de electrodos metálicos cubiertos de un material aislante. Sobre los electrodos se sitúa el cuerpo de la persona monitorizada de modo que la capacidad generada entre ellos se ve afectada por el cuerpo humano. Con el objeto de obtener una configuración adecuada, se desarrollaron una serie de electrodos co-planares en diversas configuraciones: 1) Dos electrodos rectangulares de tamaño 9x24cm separados una distancia de 2 cm. 2) Dos electrodos formados en 8 disposiciones de 55x1 cm intercalados entre sí en una configuración interdigital con 1cm de separación. 3) Dos electrodos rectangulares de tamaño 14x25cm separados 1cm. 4) Dos electrodos rectangulares de tamaño 14x25cm separados 2cm. 5) Dos electrodos rectangulares de tamaño 14x25cm separados 3 cm. 6) Dos electrodos rectangulares de tamaño 22x4cm con 1 cm de separación. 7) Dos electrodos rectangulares de tamaño 22x4cm separados 2 cm. 8) Dos electrodos rectangulares de tamaño 22x4cm separados 3 cm. También se desarrolló un esquema compuesto solamente por el electrodo de señal (10x10cm), formándose entonces la capacidad con el plano de tierra del dispositivo. 2.3.3 Etapa 3 (Reducción del efecto de las capacidades parásitas) Con el objetivo de reducir las capacidades parásitas generadas por el propio circuito y los electrodos, frente a la capacidad producida por los electrodos y el cuerpo humano, se ha considerado establecer una pantalla entre los electrodos y la tierra. Dicha pantalla se obtiene estableciendo la estructura metálica de la cama al mismo potencial que la salida del oscilador a través de un amplificador operacional en la configuración de seguidor de tensión. En la Figura 26 puede verse el esquema propuesto y las capacidades más importantes que afectan a la medida. Fig.26 Representación de capacidades parásitas sensor capacitivo conectado a paciente tumbado en la cama La configuración de seguidor de tensión nos proporciona dos ventajas significativas que provienen de las propias especificaciones de los operacionales (impedancia de entrada muy grande, impedancia de salida pequeña) [29]-[30]-[31]. Utilizando un operacional que mantenga estas prestaciones en las frecuencias de trabajo, la capacidad que se forma entre la pantalla y el electrodo de masa será muy pequeña, ya que la impedancia de salida del operacional es baja. La capacidad que existe entre el electrodo de señal y la pantalla, aunque físicamente pudiera tener un valor elevado (≈150pF), puede considerarse despreciable ya que los valores de potencial son prácticamente los mismos. Por último, la pantalla minimiza los efectos de la capacidad existente entre el electrodo de masa y la tierra, ya que esta configuración favorece que las líneas de campo desde el electrodo de señal eviten la tierra en favor de un camino más directo hacia el electrodo de masa. Otros efectos parásitos se eliminan estableciendo también este potencial en la malla de los cables coaxiales que conectan los electrodos al dispositivo. 2.3.4 Etapa 4 (Acondicionamiento de señal de salida) Finalmente la última etapa simplifica el método de transducción de señal empleado en [24] (derivada, amplificación y detección de envolvente). En esta etapa, un operacional en la configuración de comparador convierte la onda senoidal de entrada en una onda cuadrada limitada en amplitud. Un microcontrolador (PIC18LF2431 de Microchip Corp.) cuenta el número de flancos de subida de la señal durante un periodo de tiempo, y a partir de estos datos, establece la frecuencia de oscilación instantánea del sensor capacitivo. Una vez analizada todas las partes de nuestro circuito, y realizar un estudio teórico para comprobar que nuestros desarrollos tenían fundamento y podrían ser aplicados y testeados en un circuito real, procedimos a realizar simulaciones con nuestros diseños teóricos para comprobar si la sensibilidad de nuestro circuito era adecuada para la aplicación de estudio.