Abrir - Congresos
Anuncio

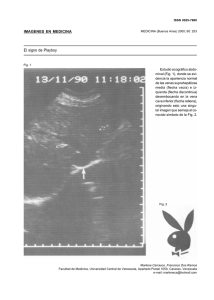
CARACTERIZACIÓN DE MASAS INERCIALES EN UN DINAMÓMETRO DE CHASIS González Oropeza R.(1), Hernández Anda J. L.(2), Vicente Rodríguez W.(3), García Puertos J. F. Martínez J. P. (5) (4) Domínguez Laboratorio de Control de Emisiones Facultad de Ingeniería Universidad Nacional Autónoma de México Apartado Postal 70-258 México D. F. C.P. 04511 (1) rog1950@servidor.unam.mx, (2) roaltec@cablevision.net.mx (3) WVicenteR@iingen.unam.mx (4) jfergar@yahoo.com.mx (5) jpdoma1079@hotmail.com RESUMEN Hoy en día, la tecnología de los vehículos no sólo contempla mejorar las prestaciones del motor y el confort de sus ocupantes, sino disminuir el nivel de sus emisiones contaminantes. Incluso, si en una ciudad o región se tienen condiciones críticas respecto a la calidad del aire, seguramente existirán normas que regulen los niveles de emisiones y métodos específicos para medirlas en los vehículos que circulan por esa ciudad o región[12]. Tal es el tema de este trabajo, que se refiere a la caracterización de un dinamómetro de rodillos para vehículos ligeros, o también llamado dinamómetro de chasis, el cual recientemente sufrió modificaciones para simular la inercia de los vehículos que, montados en dicho dinamómetro, se les somete a un ciclo de manejo para simular las condiciones de circulación por las calles de la ciudad y así, medir sus emisiones contaminantes y el consumo de combustible en condiciones reales de manejo. Se muestra la instrumentación con que cuenta el equipo, el sistema de volantes de inercia recientemente diseñado, construido y acoplado al dinamómetro, así como los algoritmos que se introducen al software de dicho equipo para calcular el par y potencia demandados al motor, de acuerdo a los ciclos de manejo, característicos de la Ciudad de México. En general se comenta la metodología de cálculo y de medición, tanto de los niveles de los gases emitidos como del consumo de combustible. Palabras clave: Dinamómetro de chasis o rodillos Código 600 Fig. 1 c) d) a) Disposición de los rodillos, b) Dispositivos de control, c) Vista en planta, d) Conjunto Introducción Este dinamómetro se utiliza para realizar pruebas dinámicas en vehículos ligeros (no más de 3800 kg, ó 37,278 N de peso bruto vehicular). El vehículo de prueba se coloca en los rodillos de acuerdo a su transmisión, delantera o trasera como se muestra en las figuras 2(a) y 2(b) respectivamente[3]. Fig. 2(a) Tracción delantera Fig. 2(b) Tracción trasera Este dinamómetro ha sufrido cambios en su diseño original, de manera que ha ido adecuándose a las necesidades técnicas que se van presentando, por ejemplo, lo mismo sirve para dar cumplimiento a las normas oficiales mexicanas, como también para desempeñar actividades diversas de investigación que se realizan en el Laboratorio de Control de Emisiones (LCE) de la Facultad de Ingeniería, de la Universidad Nacional Autónoma de México (UNAM)[14]. Las actividades de este laboratorio son diversas, pero las que competen a este artículo son las experimentales, las que se realizan para investigación y también aquellas que brindan servicios a particulares, empresas e instituciones que desean evaluar dispositivos, productos o sistemas destinados a reducir el consumo de combustible y a reducir las emisiones contaminantes de los vehículos que tienen un motor de combustión interna como medio de locomoción. El método de prueba es semejante al descrito en la Norma Mexicana NMX-AA-11-1993-SCFI “Método de prueba para la evaluación de emisiones de gases del escape de los vehículos automotores nuevos en planta que usan gasolina como combustible”[3], que a su vez se apoya en el establecido por la Agencia de Protección al Medio Ambiente (EPA en inglés) de los Estados Unidos de Norteamérica [4]. Tratando de resumir el procedimiento, se menciona lo siguiente: • El vehículo de prueba se monta en los rodillos • Se prueba el colchón neumático, para asegurarse que el vehículo no saldrá de los rodillos • Se conectan los tensores a fin de que los neumáticos no tenga juegos inapropiados con los rodillos, mientras se siguen los ciclos de manejo. • Se conectan los sensores como el de la temperatura de aceite del motor (en la funda de la “bayoneta”), la pinza de inducción o de otro tipo para medir el régimen de giro del motor (rpm), los cables provenientes del sistema de medición de combustible y del analizador de gases. • Se desarrolla la etapa de ensayos preliminares, en las que se sigue uno de los 5 ciclos de manejo de la Ciudad de México (que ha desarrollado el LCE ) a efecto de corroborar el buen funcionamiento de todos los equipos y alcanzar la temperatura de operación normal del motor, que indica el fabricante. • Se inserta la sonda del analizador de gases en el tubo de escape y se verifica que todos los instrumentos de medición estén operando correctamente. • Se inician los ensayos formales, que consisten en seguir el ciclo de manejo que se haya planeado (Cd. De México, FTP – 75, Europeo, Japonés, etc), 3 veces, con un descanso de 2 ó 3 minutos entre ellos. • Durante cada ciclo, se miden segundo a segundo: velocidad del vehículo Cv, carga aplicada τ, consumo de combustible mf, par motor Me, potencia específica Ne, régimen de giro del motor n, temperatura del aceite del motor Ta y concentración de los gases: monóxido de carbono CO, bióxido de carbono CO2, hidrocarburos, óxidos de nitrógeno NOx, oxígeno O2. Un esquema general de la comunicación entre los diferentes sistemas y el dinamómetro se muestra en la Fig.3 Fig. 3 Instrumentación y comunicación con los equipos periféricos[9] Como se podrá intuir fácilmente, el dinamómetro tiene diversas funciones o propósitos, tanto para simular las condiciones reales de operación de los vehículos, como para, una vez instrumentados, medir los parámetros de interés de alguna prueba en particular. Por tal motivo, es menester que también se simule la inercia del vehículo de prueba, que es el objetivo principal de este trabajo. Las figuras anteriores muestran las características físicas, de instrumentación y de control del dinamómetro, pero en ellas también se aprecia la falta de las masas inerciales que estos equipos deben tener para simular la inercia de los Fig. 4 (b) Perspectiva del dinamómetro completo vehículos de prueba. Dicha inercia puede ser simulada mediante cargas eléctricas, electro-magnética, volantes de inercia u otros arreglos. En nuestro caso son volantes, como se muestra en la fig. 4 (a) y (b) Fig. 4 (a) Acoplamiento de los volantes Fig. 5 Vista en planta del arreglo de los volantes inerciales La inercia de un vehículo esta íntimamente asociada a la masa de dicho vehículo, de manera que la forma de simular dicha inercia es agregando al dinamómetro una carga equivalente al peso de dicho vehículo, y se calibra mediante un método sencillo, llamado método de coast-down (cuesta abajo). Consiste en medir el tiempo que tarda un vehículo en disminuir su velocidad de 70 a 60 km/h, si se encuentra dentro del rango de los vehículos ligeros, si se trata de camiones ligeros, las velocidades de calibración son: de 88.5 a 72.4 km/h, y así con otras clases de vehículos[4]. Creemos pertinente mencionar en este trabajo que, independientemente de agregar la carga inercial al vehículo de prueba, también se debe aplicar una carga de camino que se presenta con la fricción del aire y al rodar sobre el asfalto[7] (ver ec. 1). Dicha carga, por ejemplo, es igual a 5.9 hp si se tiene el mínimo peso, no más de 511 kg (5013 N) o bien de 14.4 hp, si el vehículo pesa hasta 2727 kg (26,752 N). Dicha carga se proporciona con el freno de corrientes parásitas que tiene el equipo[3]. Nc = (CRMvg + 1/2ρaCDAVSv2) SV ec (1) Donde: Nc Potencia de la carga de camino CR Coeficiente de resistencia al rodamiento (0.012 < CR < 0.015)3 MV Masa del vehículo Aceleración local de la gravedad 9.81 m/s2 ρa densidad del aire en condiciones ambientales 1.2 kg/m3 CD Coeficiente de arrastre SV velocidad del vehículo. En las unidades de S.I. que normalmente se usan Nc (kW) = [2.73 CRMv (kg) + 0.126 CDAV (m 2 ) Sv (km/h)2 ] SV (km/h) x 10 -3 ec (2) Regresando al tema principal de este trabajo, diremos que se calcularon la inercia de cada uno de los volantes, junto con todas las piezas del arreglo (rodillos, flechas, chumaceras, coples, embragues, etc) y hemos estimado el o los volates que deben acoplarse a los rodillos de acuerdo al peso de los vehículos. Para ello se tienen embragues neumáticos, operados de forma individual, como se muestra en la fig. 6 ARREGLO Tres volantes de distinto momento de inercia han sido instalados al dinamómetro de chasis con el fin de simular la inercia del vehículo durante la prueba. Los volantes han sido acoplados a uno de los rodillos mediante una flecha motriz, la cual transmite el movimiento mediante dos poleas y cuatro bandas a un embrague neumático montado en el eje de cada volante inercial, Fig.4(a). El embrague neumático se acciona manualmente mediante una válvula montada en el tablero de control, la cual le suministra aire a presión al cilindro del embrague, el cual¸a su vez presiona el disco de fricción y hace girar al volante (Fig. 5). De esta forma, se pueden acoplar fácilmente al rodillo principal, cada uno de los volantes para hacer las combinaciones requeridas durante las pruebas. CARACTERÍSTICAS DE LOS ELEMENTOS MECÁNICOS Las características principales de los elementos mecánicos acoplados al dinamómetro se muestran en la Tabla 1. En dicha tabla se condensan los cálculos realizados[1,2] para conocer el par de torsión y los elementos mecánicos necesarios para moverlos, para ello fue necesario especificar la aceleración angular con la que estos elementos se mueven y poder aplicar la ecuación de la inercia (ec. 3) Fig.6 Válvulas neumáticas para embragar los volantes Fig.7 Embrague neumático[10] Tabla 1. Características principales de los volantes de inercia y sus elementos de acoplamiento ELEMENTO MASA kg Volante Izquierdo m1 Volante central m2 RADIO DE GIRO m 90.659 r1 0.27 71.757 r2 0.27 Volante derecho m3 33.779 r3 Flecha del volante mfv 8.7509 Embrague con polea mc Flecha motriz mfp Polea motriz Cople Rodillo PAU INERCIA 2 kg-m I1 3.38 I2 2.675 0.23 I3 0.883 rfv 0.03 Ifv 0.003 33.603 rc 0.10 Ic 0.173 43.93 rfp 0.03 Ifp 0.022 mpol 1.7502 mcop 9.976 rpol 0.08 Ipol 0.005 rcop 0.06 Icop 0.02 mrod 204.77 rrod mPAU 85.759 rPAU 0.15 Irod 2.378 0.26 IPAU 2.946 T = Iα ec.(3) Donde Τ es el par generado por la masa m al cambiar su velocidad angular ω durante un lapso de tiempo α= dω dt ec.(4) Hoy en día, es común conocer algunos parámetros de las prestaciones de los vehículos que las compañías automotrices sacan a la venta, y uno de estos parámetros es el tiempo que tarda un automóvil en alcanzar los 100 km/h, partiendo del reposo, (su aceleración) y es claro que, en la medida de su inercia, se requerirá mayor o menor potencia para alcanzar la velocidad objetivo. Esto es lo que hemos utilizado para estimar la máxima potencia que se trasmite a través de las bandas que acoplan a la flecha con los volantes, y de esta manera estar seguros que nuestra instalación es segura y que se trasmite la potencia que se requiere. Cálculo de la potencia La potencia se calcula mediante la ec. (5) HP = Tω 745.7 ec.(5) para T en newtons-metro (N-m) y ω en s-1, el factor 745.7 convierte N-m/s (watts) a hp. La velocidad angular ω1 que alcanzan los rodillos cuando el automóvil llega a v= 100 km/h se calcula mediante la ecuación (6) ω1 = v ec.(6) rrod y usando los datos de la Tabla 1 puede verse que ω1 = 1751 rpm o bien ω1 = 183.33 s-1 La flecha de cada uno de los volantes se hace girar mediante dos poleas con una relación de reducción R= rpol rc = 0.75 ec.(7) De tal forma que la velocidad angular ω2 con la que se mueven los volantes es ω2 = Rω1 = 1313 rpm o bien ω2 = 137.5 s-1 Teniendo las velocidades de las flechas motriz y de los volantes, se pueden calcular los pares de torsión y la potencia necesaria para mover los elementos mecánicos del conjunto de volantes inerciales, los resultados se muestran en la Tabla 2 Tabla 2: Par y potencia necesarios para mover el conjunto de elementos mecánicos de los volantes de inercia, de 0 a 100 km/h en 4 segundos[1,2] ELEMENTO Volante Izquierdo m1 Volante central m2 RADIO DE GIRO m 90.659 r1 0.27 71.757 r2 0.27 Volante derecho m3 33.779 r3 Flecha del volante mfv 8.7509 rfv Embrague con polea mc 33.603 rc Flecha motriz mfp 43.93 rfp Polea motriz mpol 1.7502 mcop 9.976 Cople Rodillo PAU MASA kg INERCIA 2 kg-m Vel. final km/h tiempo Vel. Rod Acel Rod Vel. Volante Acel. Vol TORQUE POTENCIA -1 -1 -2 -2 α1 s ω2 s α2 s segundos ω1 s N-m HP I1 3.38 100 4 137.5 34.375 116.174 21.42 I2 2.675 100 4 137.5 34.375 91.953 16.96 0.23 I3 0.883 100 4 137.5 34.375 30.339 5.59 0.03 Ifv 0.003 100 4 137.5 34.375 0.120 0.02 0.10 Ic 0.173 100 4 137.5 34.375 5.962 1.10 0.03 Ifp 0.022 100 4 183.33 45.83 1.015 0.25 rpol 0.08 Ipol 0.005 100 4 183.33 45.83 0.233 0.06 rcop 0.06 Icop 0.02 100 4 183.33 45.83 0.922 0.23 mrod 204.77 rrod mPAU 85.759 rPAU 0.15 Irod 2.378 IPAU 2.946 100 4 183.33 45.83 108.991 26.80 100 4 183.33 45.83 135.038 33.20 0.26 Potencia necesaria para mover el conjunto de volantes (ver Fig. 5) Cada volante necesita, para poder girar, los siguientes elementos : flecha del volante, embrague con polea y volante A su vez el conjunto motriz tiene los siguientes elementos: flecha motriz, tres poleas motrices, dos rodillos, dos coples y la unidad de absorción de potencia, por sus siglas en inglés PAU. La capacidad de transmisión de potencia por cada una de las bandas de la transmisión para una relación 6:8 es1: HP = 7.37 @ 1750 rpm banda ec.(8) El resumen de todos estos cálculos se muestra en la tabla 3: Tabla 3. Resumen de par y potencia requeridos ELEMENTO Conjunto Volante Izquierdo TORQUE N-m POTENCIA HP 122.26 22.54 Conjunto Volante central 98.03 18.08 Conjunto Volante derecho 36.42 6.72 Conjunto Motriz 356.58 87.67 Maximo 613.29 135.00 De tal forma que la potencia máxima que pueden transmitir las cuatro bandas es HPmax = HP * 4 = 29.48 banda ec.(9) El par de torsión que puede soportar el embrague se muestra en la Fig. 8[10]. PAR ESTÁTICO DE TORSIÓN EN N-m H - 1000 320 280 240 200 160 120 80 40 0 70 140 210 280 350 420 490 560 PRESION DEL AIRE EN MPa Fig.8 Par de torsión del embrague neumático La potencia que pueden soportar las bandas, ecuación (10), es mayor a la que puede desarrollar un auto normal según la Tabla 2, pues la potencia requerida es de 21.42 HP. El par que transmite el embrague, Tabla 2, es mucho menor que el máximo permisible de la Fig.3, porque 116< 300x0.85, ya que según el fabricante, el par dinámico que puede soportar el embrague es el 85 % del mostrado en la Fig. 3. CONCLUSIONES Y COMENTARIOS 1. Un equipo de estas características permite simular las situaciones que se pudieran presentar en cuanto a la carga de un vehículo en la carretera, evitando así tener que elaborar recorridos físicos y permitiendo un análisis verídico de las condiciones de operación. 2. El dinamómetro de chasis cumple con las funciones de un equipo para ensayos de vehículos, midiendo las variables de interés, asegurando la correcta adquisición de datos, permitiendo obtener un instrumentó de medición confiable preciso y fácil de manejar, que tiene la ventaja de haber sido desarrollado por este equipo de trabajo y no depender de una tecnología extranjera 3. Las mejoras efectuadas han dado pie a tener un equipo más poderoso, facilitado al usuario la tarea de evaluar vehículos (servicios) y desarrollar investigación en este campo del conocimiento. Además, ya puede homologarse este equipo para que las mediciones realizadas tengan validez internacional. 4. Contemplado una visión a futuro, el software y hardware de desarrollo permite escalar el equipo, modernizándolo permanentemente para dar satisfacción a nuevos protocolos de ensayos. 5. Los resultados de estos estudios serán útiles en la investigación y desarrollo para la homologación y certificación a prototipos y/o modelos de vehículos, analizando los componentes contaminantes de las emisiones y sus prestaciones bajo determinado ciclo de trabajo. 6. En la docencia permite ensayar y efectuar las mediciones correspondientes en funcionamiento real, lo que ha dado como resultado el conocimiento del instrumento de manera práctica y teórica. BIBLIOGRAFÍA CONSULTADA: 1. 2 3 4 5 6 7 8 9 10 11 12 13 14 J. L. Meriam, “SI version DYNAMICS”, J Wiley & Sons, 1975 R. L. Norton, “Machine Design”, Prentice Hall, 1996. Norma Mexicana NMX-AA-11-1993-SCFI Code of Federal Regulations 40, parts 86 to 99, pp 438- 488, july 1998, EPA, USA Jeef Anderson, Diferent Kinds of Dynamometer and Power Absortion Units, Dyne Sistemas Cía. LLC, USA. Revisión del 23 de marzo de 1997. Jack P Holman, Métodos Experimentales para Ingenieros Ed. Mc Graw Hill. México DF. 1983. John B. Heywood, “Internal Combustion Engine Fundamentals“, Cap.2, Engine, Design & Operating Parameters pp.42-59. McGraw Hill 1988. Bird & King, “An introduction to power electronics”., Ed. JOHN WILLEY & SONS / 1era edición. USA 1984. Antonio Manuel Lázaro. “LabVIEW Programación gráfica para el control de Instrumentación”. Cap. 8 Sistemas de adquisición y procesado de datos. Ed.Paraninfo / Thomson. Editores, 1era edición. Madrid, España 1997. D 85 Dodge Engineering Catalog, 1984, by Reliance Electric Company. González O.R., Galván Z. A Desarrollo de ciclos de manejo característicos de la Ciudad de México,. IX Congreso anual Somim, Veracruz, Ver. Méx. septiembre 2003 González Oropeza R, Los Ciclos de Manejo, una Herramienta Útil si es Dinámica para Evaluar el Consumo de Combustible y las Emisiones Contaminantes del Auto- Transporte, Revista Ingeniería, Investigación y Tecnología, Vol VI N° 3, julio 2005, México D.F. Santiago Cruz L., Rincón Gómez P.I., Instrumentación del dinamómetro de chasis del Laboratorio de Control de Emisiones de la Facultad de Ingeniería de la UNAM, XV Congreso Anual de la Sociedad Mexicana de Instrumentación, Guadalajara Jalisco, octubre del 2000. Primer lugar del Congreso y publicación en la revista de la Sociedad. González Oropeza R, Huerta García M.A., Santiago Cruz L. Modernización de la instrumentación de un dinamómetro de chasis para pruebas vehiculares, XI Congreso Anual Sociedad Mexicana de Instrumentación México, D.F. octubre 2003.