UNIDAD TEMÁTICA No.2 - Universidad Tecnológica del Perú
Anuncio

UNIVERSIDAD TECNOLÓGICA DEL PERÚ Vicerrectorado de Investigación Electrónica Analógica I TINS Básicos Facultad de Ingeniería Electrónica y Mecatrónica TEXTOS DE INSTRUCCIÓN BÁSICOS (TINS) / UTP Lima ‐ Perú © Electrónica Analógica I Desarrollo y Edición: Vicerrectorado de Investigación Elaboración del TINS: • Ing. Moisés Leureyros Pérez • Ing. José Andres Sandoval Valencia Diseño y Diagramación: Julia Saldaña Balandra Soporte académico: Instituto de Investigación Producción: Imprenta Grupo IDAT Queda prohibida cualquier forma de reproducción, venta, comunicación pública y transformación de esta obra. 2
“El presente material contiene una compilación de obras de Electrónica Analógica I, publicadas lícitamente, resúmenes de los temas a cargo del profesor; constituye un material auxiliar de enseñanza para ser empleado en el desarrollo de las clases en nuestra institución. Éste material es de uso exclusivo de los alumnos y docentes de la Universidad Tecnológica del Perú, preparado para fines didácticos en aplicación del Artículo 41 inc. C y el Art. 43 inc. A., del Decreto Legislativo 822, Ley sobre Derechos de Autor”. 3
4
Presentación El presente texto elaborado en el marco de desarrollo de la Ingeniería, es un material de ayuda instruccional, en las carreras de Ingeniería Electrónica y Mecatrónica para la Asignatura de Electrónica Analógica I correspondiente al sexto y quinto ciclo de estudios respectivamente. Plasma la iniciativa institucional de innovación del aprendizaje educativo universitario que en acelerada continuidad promueve la producción de materiales educativos, actualizados en concordancia a las exigencias de estos tiempos. Esta edición apropiadamente recopilada, de diversas fuentes bibliográficas, de uso frecuente en la enseñanza de la Electrónica Analógica I, está ordenada en función del sillabus de la asignatura arriba mencionada. La conformación del texto ha sido posible gracias al esfuerzo y dedicación académica de los Profesores: Ing. Moisés Leureyros Pérez y José Andrés Sandoval Valencia; ellos basados en su reconocida labor profesional – académica han hecho posible la presente estructura capitular: El primer capitulo: Diodos; esboza la teoría del diodo semiconductor, características, parámetros eléctricos y aplicaciones. En el segundo capítulo: Filtros; estudia los filtros pasivos, los diferentes tipos de filtros y familias de tal manera que se entienda su aplicación. En el tercer capítulo: Transistor de juntura bipolar; se presenta el funcionamiento del transistor, su curva característica, punto de operación, polarización y análisis en pequeña señal. En el cuarto capítulo: Transistor de efecto de campo; se estudia otro tipo de transistor diferenciándolo con el BJT en cuanto a estructura interna y modo de trabajo o funcionamiento. En este capítulo también se estudia el Mosfet. En el quinto capítulo: Amplificadores; se estudia las características del los amplificadores, culminando con amplificadores operacionales. En el sexto capítulo: Reguladores; los reguladores de tensión son importantes porque suministran adecuadamente la energía al sistema (circuito eléctrico/electrónico) a ser controlado, se estudian diferentes tipos de reguladores. 5
En el séptimo capítulo: Respuesta en frecuencia; se estudia la respuesta en estado estacionario (régimen permanente) de un amplificador ante una entrada sinusoidal. Para el estudio del amplificador, se varía la frecuencia de la sinusoide de entrada dentro de un determinado rango de frecuencias y se obtiene la respuesta resultante. Al cerrar estas líneas de presentación, el reconocimiento institucional a los Ing. Moisés Leureyros Pérez y José Andrés Sandoval Valencia por su constancia en la compilación del presente texto. Ing. Lucio H. Huamán Ureta Vicerrectorado de Investigación
6
Índice Unidad Temática No.I Diodo semiconductor ........................................................................................................ 11 Diodo con polarización inversa ......................................................................................... 12 Característica tensión‐corriente........................................................................................ 12 Dependencia con la temperatura ..................................................................................... 13 Resistencia del diodo......................................................................................................... 14 Modelos circuitales del diodo ........................................................................................... 15 Capacidades internas en el diodo semiconductor ............................................................ 16 Diodos especiales .............................................................................................................. 22 Especificaciones de los diodos .......................................................................................... 24 Circuitos enclavadores de fijación..................................................................................... 38 Unidad Temática No.2 Filtros ............................................................................................................................. 43 Tipos de filtros................................................................................................................... 43 Unidad Temática No.3 El transistor bipolar (BJT) .................................................................................................. 59 Representación del transistor bipolar............................................................................... 60 Regiones de trabajo en el transistor bipolar..................................................................... 61 Técnicas de compensación................................................................................................ 70 Parámetros K ..................................................................................................................... 83 Parámetros admitancia ..................................................................................................... 85 Modelos de parámetros π–hibridos.................................................................................. 93 Tecnología del transitor .................................................................................................... 94 Formas de construcción del transitor ............................................................................... 95 Unidad Temática No.4 El transistor unipolar(FET)................................................................................................. 99 Principio de funcionamiento ............................................................................................. 99 Unidad Temática No.5 Ganancias del amplificador ............................................................................................... 127 Configuraciones de transistores........................................................................................ 134 Unidad Temática No.6 Reguladores....................................................................................................................... 189 Tipos de reguladores ......................................................................................................... 191 Ejemplos de reguladores lineales...................................................................................... 193 7
Reguladores con circuitos integrados ............................................................................... 198 Unidad Temática No.7 Respuesta en frecuencia ................................................................................................... 217 Respuesta en frecuencia de los amplificadores ................................................................ 218 Puntos de media potencia y ancho de banda ................................................................... 219 Respuesta en frecuencia del transistor............................................................................. 221 Métodos de respuesta en frecuencia ............................................................................... 223 Respuesta en baja frecuencia ........................................................................................... 233 Calculo de la respuesta en frecuencia usando MATLAB ................................................... 241 Diseño de filtros activos mediante amplificadores operacionales ................................... 242 Acoplo con transformadores en banda ancha .................................................................. 246 Redes lineales de segundo orden ..................................................................................... 250 Series de problemas .......................................................................................................... 256 Bibliografía ........................................................................................................................ 263 8
Distribución Temática Clase N° 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 Tema Circuitos con diodos. Estabilidad térmica. Circuitos de conmutación, limitadores, enclavadores. Circuitos equivalentes, curvas V‐I. Diodos especiales. Amplificaciones. Circuitos de rectificación con diodos Rectificación de media onda y onda completa. Factor de rizado. Aplicaciones. FILTROS Y REGULADORES. Filtro a condensador. Filtro a inductancia. Filtro L‐C. Filtro de varias etapas. Reguladores con Zener y C.I. Aplicaciones El transistor Bipolar. Métodos de polarización. Comparació
los diferentes métodos. Factores de estabilidad. Rectas de carga en contínua y alterna aplicaciones. El transistor de efecto de campo. Curvas, características del FET. Zona omisa y activa. Métodos de Polarización y estabilidad. Aplicaciones E X A M E N P A R C I A L Análisis en pequeñas señales del amplificador de audio – frecuencia. Modelo de parámetros híbridos. Cálculo de ganancia. Forma de Acoplo de los Amplificadores. Amplificador Multietapas y configuraciones notables. El amplificador cascode y amplificador darlington. El Amplificador Diferencial. Amplificador Operacional. Aplicaciones. Respuesta en frecuencia de amplificadores de una o más etapas. Funciones de transferencias. Ceros y Polos diagrama de Bode. Frecuencias de corte inferior y superior. 9
Semana Horas 1 2 2 2 3 2 4 2 5 2 6 2 7 2 8 2 9 2 10 2 11 2 12 2 13 2 14 2 15 2 16 2 Clase N° 17 18 Tema Respuesta en frecuencia del transistor bipolar “BJT”. Aplicaciones. Respuesta en frecuencia del transistor de efecto de campo “FET”. Aplicaciones. Semana Horas 17 2 18 2 19 E X A M E N F I N A L 19 2 20 E X A M E N S U S T I T U T O R I O 20 2 10
Electrónica Analógica I UNIDAD TEMÁTICA No. 1 DIODO SEMICONDUCTOR: Es un dispositivo formado por una capa de semiconductor tipo P junto a otra de tipo N. Conduce corriente en un solo sentido, según la polaridad de sus terminales. En las siguientes gráficas se muestran las concentraciones de cargas dentro de sus capas sin polarización, con polarización directa y con polarización inversa: Diodo sin polarización Aquí vemos que las concentraciones de cargas se mantienen constantes en el cuerpo del material. Ppo
P
Npo
-
-
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Nno
N
Pno
Donde: PPO = Concentración de cargas positivas libres (mayoritarias) en la zona P. NPO = Concentración de cargas negativas libres (minoritarias) en la zona P. NNO = Concentración de cargas negativas libres (mayoritarias) en la zona N. PNO = Concentración de cargas positivas libres (minoritarias) en la zona N. Diodo con polarización directa Aquí vemos que las concentraciones de cargas de los portadores minoritarios han aumentado a los costados de la región de transición. Esto quiere decir que hay un exceso de cargas a ambos lados de la zona de transición. En esta situación, el dispositivo conduce corriente desde la zona P a la zona N. Obsérvese que la fuente V tiene su polo positivo en la región P (llamada ANODO) y el negativo en la región N (llamada CATODO). 11
Electrónica Analógica I Ppo
Nno
p
N
N1
N1
Npo
P1
-
(Vo
+
-
V)
+
V
-
V
Pno
>
0
Diodo con polarización inversa Aquí vemos que las concentraciones de cargas de los portadores minoritarios han disminuido a los costados de la región de transición. Esto quiere decir que hay una escasez de cargas minoritarias a ambos lados de la zona de transición. En esta situación, el dispositivo no conduce corriente. Obsérvese que la fuente V tiene su polo negativo en la región P y el positivo en la región N. PPO
NNO
P
N
NPO
PNO
-
+
V
A continuación se muestra el símbolo que se usa para representarlo: CARACTERÍSTICA TENSIÓN – CORRIENTE: La ecuación del diodo semiconductor es: ID = Io (℮V/ηVT – 1) 12
Electrónica Analógica I Donde: V = tensión en el diodo ID = corriente del diodo Io = corriente inversa de saturación VT = kT / e =Tensión térmica (25.8 mV á T = 300°K) η = Coeficiente de emisión (1 para el germanio y 1 ó 2 para el silicio) k = Constante de Boltzman = 8.62x10‐5 eV/°K) e = Magnitud de la carga del electrón = 1.602x10‐19C T = Temperatura absoluta en °K El diodo empieza a conducir con polarización directa si la tensión supera la de codo o umbral, Vγ. Esta tensión vale: 0.1 ó 0.2 V para el germanio y 0.6V para el silicio. Es posible simplificar la ecuación del diodo si tenemos en cuenta que, por ejemplo, un diodo de silicio prácticamente no conduce si su tensión directa es del orden de 0.5 V. En este caso, con η = 2: ID = Io (℮V/ηVT – 1) = Io (℮0.5 / 2x0.0258 – 1) = ℮ 9.69 – 1 = 16,154 – 1 Lo anterior significa que cuando el diodo conduce corriente directa, podemos despreciar el número: – 1, debido a que no introduce error apreciable. DEPENDENCIA CON LA TEMPERATURA: Los dispositivos semiconductores dependen mucho de la temperatura. La corriente inversa de saturación del diodo es dada por la ecuación: Io = K Tm e‐VGO/VT Donde: T es la temperatura absoluta en °K. K es una constante VGO = EGO / e: Es el equivalente en tensión del ancho de la banda prohibida á 0 °K VT = kT / e: Es la tensión térmica. Se demuestra que: Io se duplica por cada aumento de la temperatura en 10 °C La tensión en el diodo disminuye en 2.5 mV por cada grado de aumento de la temperatura: ∆V /∆T = ‐ 2.5mV / °C 13
Electrónica Analógica I Estos datos deben tenerse muy en cuenta cuando el dispositivo eleva su temperatura RESISTENCIA DEL DIODO: Si un diodo tiene aplicada una tensión V y conduce una corriente ID, se presentan dos tipos de efectos resistivos: RESISTENCIA ESTÁTICA: En el gráfico siguiente vemos la curva del diodo y las coordenadas del punto de trabajo, Q, son: (VQ,IDQ) La resistencia estática es definida como: RE = VQ / IDQ ID
IDQ
Q
VQ
V
Este concepto es aplicable cuando el diodo está sometido a tensiones y corrientes constantes. RESISTENCIA DINÁMICA: Esta resistencia se emplea cuando el diodo es sometido a corrientes y tensiones que varían con el tiempo. 14
Electrónica Analógica I ID
IDQ + id
VQ - vd
VQ
VQ + vd
Q
IDQ
IDQ - id
V
En la gráfica puede verse que la señal montada en el nivel del punto de operación hace variar la tensión y corriente en ΔV (= vd) y ΔID (= id), alrededor del punto de trabajo, Q. En este caso es más útil el concepto de resistencia dinámica, definida como: rd = dV / dID La cual es evaluada en el punto de trabajo, Q. Podemos ver que la resistencia dinámica es la inversa de pendiente de la tangente en el punto de trabajo, Q, del diodo. Se obtiene la ecuación de la resistencia dinámica partiendo de la ecuación del diodo. Si derivamos ID respecto de V, obtenemos inicialmente la conductancia dinámica: gd = dID/dV = Io [e V/ηVT]/ ηVT = IDQ/ ηVT Luego la resistencia dinámica es: rd = 1/gd = ηVT / IDQ MODELOS CIRCUITALES DEL DIODO: El concepto de resistencia dinámica nos permite hacer un modelo linealizado del diodo para simplificar los cálculos y evitar el empleo de la ecuación exponencial: 15
Electrónica Analógica I ID
1/rd
0
Vγ
V
La tensión de codo o tensión umbral, indica el voltaje directo al cual el diodo empieza a conducir corriente apreciable. El gráfico mostrado se puede representar por el siguiente circuito: Vγ
rd
+
A
DIODO IDEAL
- C
El diodo ideal es un dispositivo que no existe físicamente, pero que nos sirve para hacer el modelo circuital. En este dispositivo: rd = 0, Vγ = 0, Io = 0 y puede manejar cualquier corriente a cualquier frecuencia y puede soportar cualquier tensión inversa. Su gráfico corresponde a una línea vertical que, con polarización directa, coincide con el eje de corrientes y con polarización inversa, su gráfica coincide con el eje de tensiones. Se debe indicar también que si se quiere lograr más precisión, se pueden emplear más segmentos, y el modelo circuital se complicará más. CAPACIDADES INTERNAS EN EL DIODO SEMICONDUCTOR Otra de las características notables de la unión P‐N es que en la región de transición se presentan dos tipos de efecto capacitivo. Uno, predomina cuando hay polarización inversa y el otro predomina cuando hay polarización directa. Empezaremos estudiando el caso con polarización inversa Capacidad de transición (CT): Al establecerse la unión, se produce un flujo inicial de cargas a través de ella debido a los gradientes de concentración. Los átomos de impurezas a los costados de la 16
Electrónica Analógica I juntura se ionizan, formándose dos regiones con cargas opuestas e inmóviles debido a que los iones están fijos en la red cristalina. Este comportamiento es similar al de un condensador de placas planas y paralelas. Sin embargo, la diferencia está en que estas regiones pueden aumentar o reducir su separación en función del voltaje externo aplicado, dando origen a un efecto capacitivo no lineal. Por ello, y teniendo en cuenta que CT debe ser un valor positivo, se define la capacidad de transición en función de la magnitud de la derivada de la carga respecto al voltaje aplicado: CT = │dQ/dV│ Unión abrupta: Es aquella en la que el material tipo p cambia bruscamente a tipo n o viceversa. W = ancho total de la región de transición. Wp = ancho de la región de transición en la zona P. Wn = ancho de la región de transición en la zona N. A = Area (o sección) transversal del diodo. El primer paso es hallar la distribución de cargas partiendo de la densidad de carga: Si la concentración de impurezas es uniforme, en estado de equilibrio, las cargas negativas a un lado de la unión, deben ser iguales a las positivas al otro lado. O sea: AWp eNd = AWn eNa De donde: Wp Nd = Wn Na -
V +
W
Wp
Wn
- - - + + +
- - - + + +
P
A
- - - + + +
N
- - - + + +
C
- - - + + +
- - - + + +
Vo - V
0
Wp
W
Utilizando las propiedades de las proporciones: Wp = W ND/(NA + ND) 17
x
Electrónica Analógica I Wn = W NA/(NA + ND) El ancho de la región de transición se relaciona con el voltaje externo con la siguiente ecuación: eNDNAW2 Vo – V = ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ 2ε(NA + ND) La capacidad de transición se obtiene con la siguiente ecuación: εA CT = ‐‐‐‐‐‐‐‐ W Despejando W y reemplazando: εA[eNAND]1/2 CTo CT = ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ = ‐‐‐‐‐‐‐‐‐‐‐‐‐‐ [2ε(NA + ND)]1/2 [Vo – VD]1/2 [1 – V / Vo]1/2 Este resultado es válido para unión abrupta. Se puede deducir en forma análoga para otros tipos de uniones. En este caso: CTo CT = ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ [1 – V / Vo] m CTo es la capacidad de transición cuando no hay polarización externa. m es el coeficiente de gradiente de unión y su valor está comprendido entre 0.33 y 0.5 Capacidad de difusión (CD): Este comportamiento se presenta principalmente cuando la polarización es directa. Como ya se ha visto, en este caso las concentraciones de portadores minoritarios aumentan a los costados de la zona de transición. El aumento de huecos en un lado se corresponde con la reducción en el otro lado, generándose un efecto capacitivo por huecos, algo análogo sucede con los electrones. Estas capacidades también son no lineales, por lo que se define: 18
Electrónica Analógica I CD = CDp + CDn = │dQp/dV│+ │dQn/dV│ Donde: Qp representa el exceso de cargas positivas (huecos) Qn representa el exceso de cargas negativas (electrones) Estas cargas son proporcionales a la corriente en el diodo y podremos expresarla como: Q = Qo ℮V / VT Luego obtenemos: CD = gpτp +gn τn Donde: gp es la conductancia dinámica de huecos en la zona P. gn es la conductancia dinámica de electrones en la zona N. τp es el tiempo de vida medio de los huecos en la zona P. τn es el tiempo de vida medio de los electrones en la zona N. En el caso particular que: τp = τn = τ La ecuación se reduce a: CD = gτ Donde : g es la conductancia dinámica del diodo. PROBLEMA 1.1: Un diodo de silicio p+ n, con η = 1, está polarizado con una corriente directa de 1 mA. Su capacidad de transición es 100 pF. Si el tiempo de vida medio es τn = τp = 1 μs ¿Cuál es la admitancia del diodo a temperatura ambiente a una frecuencia de 1 MHz SOLUCION: La conductancia dinámica del diodo está dada por: g = ID/VT = 1 mA/26 mV = 0.04 A/V La capacidad de difusión es: CD = g τ = 40 nF Como esta capacidad es mucho mayor que la de transición, la capacidad equivalente será prácticamente CD 19
Electrónica Analógica I La admitancia del diodo a 1 MHz es: Y = g + jw CD = 0.04 + j 0.025 PROBLEMA 1.2: ¿Para qué tensión inversa la corriente de un diodo de germanio será el 90% de su valor de saturación (Io) a temperatura ambiente? SOLUCION: La corriente del diodo está dada por la ecuación: ID = Io [℮V/ηVT – 1] A una tensión de polarización inversa, V, el diodo dejará pasar una corriente inversa igual a ‐0.9 Io. Entonces: ‐0.9 Io = Io [℮ V/ηVT – 1] ‐0.9 = ℮ V/ηVT – 1 exp(V/ηVT) = 0.1 De donde: V = (26 mV) ln(0.1) = ‐ 59.87 mV Tiempos de conmutación del diodo semiconductor: Cuando el diodo trabaja en conmutación ( o sea, pasando de su estado de conducción al de no conducción y viceversa), demora para pasar de un estado al otro. Al tiempo que demora en pasar del estado de conducción al de no conducción se le llama: tiempo de recuperación inversa (trr). Al tiempo que demora en pasar del estado de no conducción al de conducción se le llama tiempo de recuperación directa (trd). Es importante tener cuidado con estos tiempos debido a que durante los transitorios los diodos pueden verse afectados e incluso destruirse, especialmente cuando trabajan con corrientes altas. Tiempo de recuperación inversa (trr): Cuando el diodo conduce, hay un exceso de cargas a ambos lados de la región de transición. Al invertirse la polaridad este exceso debe ser eliminado para que el diodo pase a su estado de no conducción. Por ese motivo, el diodo conducirá en sentido inverso durante unos instantes, como se muestra en la siguiente figura: 20
Electrónica Analógica I V
0.7
t
ID
ta
I
tb
- 0.2 IR
t
t
- IR
ta es el tiempo que pasa desde que la corriente es cero hasta que llega a su pico inverso (IR) tb es el tiempo que pasa desde que la corriente esta en su pico inverso hasta que se reduce al 20% de su valor. Luego: trr = ta + tb El área bajo la curva de corriente inversa representa la carga de recuperación inversa, QR, (ó carga en exceso). De las gráficas vemos que se cumple aproximadamente: QR = ½ IR ta + ½ IR tb = ½ IR trr Luego: IR = 2QR / trr A la relación entre tb / ta se le da el nombre de factor de suavidad, FS FS = tb / ta Tiempo de recuperación directa (trd): Cuando el diodo no conduce, hay una escasez de cargas a ambos lados de la región de transición. Al ponerse polarización directa, esta escasez debe pasar a exceso de cargas y deberá limitarse la velocidad de variación de la corriente (dI/dt) porque el dispositivo puede dañarse, especialmente cuando está trabajando con corrientes altas. 21
Electrónica Analógica I La variación de la velocidad de la corriente se limita comúnmente poniendo una bobina de pequeño valor en serie con el diodo. PROBLEMA 1.3: El tiempo de recuperación inversa de un diodo es trr = 5μs y la velocidad de reducción de la corriente es dI/dt = 80A/μs. Si el factor de suavidad es FS = 0.5, halle: a) La carga de almacenamiento, QR b) La corriente pico inversa, IR Solución: a) Sabemos que: trr = ta + tb = ta ( 1 + FS) Luego: ta = trr /(1 + FS) = 5μs / (1+0.5) = 10/3 μs tb = trr ‐ ta = 5/3 μs Sabemos también que: IR / ta = dI/dt Además: QR = ½ IR trr Reemplazando: QR = ½ (ta dI/dt) trr = ½ (5/3 * 80) 5μs = (2000 / 3) μC DIODOS ESPECIALES: La unión P‐N es muy importante porque presenta una serie de fenómenos útiles que determinan la construcción de diodos especiales: Diodos de schottky: Diodo de alta velocidad formado por unión metal – semiconductor. Símbolo: Diodo zener: Diodo diseñado para trabajar en su región de ruptura. Se le emplea como regulador de tensión o como limitador. Diodo varicap: Diodo usado como capacidad variable con la tensión. Se polariza inversamente. Diodo de avalancha: Diodo usado como protección contra sobre tensiones. Se usa su región de ruptura. Fotodiodo: Diodo usado para convertir luz en electricidad. Diodo emisor de luz: Diodo usado para emitir luz. 22
Electrónica Analógica I Diodo túnel: Diodo con alta concentración de impurezas. Usado como oscilador de alta frecuencia. TIPOS DE DIODOS DE POTENCIA: Se pueden clasificar en: Diodos de uso general: Trabajan hasta 1 KHz, con niveles de tensión inversa desde 50V hasta 5KV y niveles de corriente desde 1 A hasta varios miles de amperios. Diodos de recuperación rápida: Su tiempo de recuperación inversa es del orden de 5μs, con niveles de tensión inversa desde 50V hasta 3KV y niveles de corriente desde 1 A hasta varios cientos de amperios. Diodos de schottky: Su tiempo de recuperación inversa es del orden de los nano segundos, con niveles de tensión inversa de 100V y niveles de corriente desde 10 A hasta 300 amperios. RECTIFICADORES DE POTENCIA: La historia de la Electrónica de Potencia comenzó en 1900 con un dispositivo denominado rectificador de arco de mercurio. Fue el precursor de los dispositivos semiconductores, que dio gran impulso a la ingeniería de convertidores. Consistía en un tubo de acero en el que se hacía el vacío, dotado de un ánodo de grafito aislado y de un cátodo de mercurio que emitía electrones a través de un arco excitador. Entre el ánodo y el cátodo se ponía una rejilla. Al aplicar un impulso de tensión positivo en la rejilla se iniciaba el arco y la conducción entre ánodo y cátodo. Entre sus ventajas estaban: La elevada resistencia a las sobre‐tensiones y a las variaciones bruscas de corriente. Posteriormente aparecieron los dispositivos termoiónicos y a gas, tales como el fanotrón, el tiratrón y el ignitrón. La primera revolución electrónica se inició con la invención del transistor en los Laboratorios Bell Telephone por los señores Bardeen, Brattain y Schockley. En 1956 los mismos laboratorios inventaron el rectificador controlado de silicio (SCR). La segunda revolución electrónica ocurrió en 1958 cuando la General Electric Company desarrolló el primer tiristor (SCR) comercial. En los últimos tiempos la Electrónica de Potencia ha logrado un gran desarrollo debido, especialmente, a la evolución de los dispositivos semiconductores de potencia y de los progresos en microelectrónica. 23
Electrónica Analógica I Desde que se construyó el primer SCR, los rectificadores controlados de silicio han logrado un gran avance y actualmente pueden llegar a manejar niveles de corrientes del orden de los 10,000 amperios. Otro tanto ha sucedido con los transistores bipolares que también han logrado un alto nivel de desarrollo y los conocimientos adquiridos con él han servido para crear nuevos dispositivos que en la actualidad pueden ser usados en controles de velocidad, UPS, relés de estado sólido, etc. PROBLEMA 1.4: Los valores medidos en un diodo a temperatura de 25°C son: V = 1V con ID = 50 A y V = 1.5V con ID = 600 A. Determine: a) El coeficiente de emisión, η b) La corriente inversa, Io. SOLUCIÓN: La ecuación del diodo es: ID = Io (℮V/ηVT – 1) Luego: 50 = Io (℮1/ηVT – 1) = Io ℮1/ηVT Además: 600 = Io (℮1.5/ηVT – 1) = Io ℮1.5/ηVT Dividiendo: 600 ℮1.5/ηVT ‐‐‐‐ = ‐‐‐‐‐‐‐‐‐‐‐ = ℮0.5/ηVT 50 ℮1/ηVT Despejando: 0.5 η = ‐‐‐‐‐‐‐‐‐‐‐‐‐‐ = 7.8 VT ln(12) ESPECIFICACIONES DE LOS DIODOS: Para poder seleccionar un diodo los fabricantes dan un conjunto de especificaciones: Tensión directa (VD): Es la caída de tensión directa para la corriente promedio especificada. Tensión inversa de pico repetitiva (VIP ó PRV): Es el máximo voltaje inverso que puede soportar el diodo. 24
Electrónica Analógica I Tensión inversa de pico no repetitiva (VNR ó PNRV): Cuando el diodo soporta tensiones inversas que varían con el tiempo, puede haber algún instante que sobrepase el VIP. Si este tiempo es muy corto, el diodo puede soportar hasta este nivel máximo. Estas tensiones son producidas por cargas de tipo inductiva conectadas al diodo o conectadas a la red de AC. Corriente directa promedio (IDC ó IF): Es el nivel máximo de corriente continua directa que puede conducir. Corriente directa pico repetitiva (IPmax ó IFRM): Cuando el diodo conduce corrientes que varían con el tiempo, pueden haber instantes que alcance valores pico. El valor máximo que el diodo puede soportar es el especificado. Corriente directa pico no repetitiva (IPNR ó IFNR): Cuando el diodo conduce corrientes directas que varían con el tiempo, puede haber algún instante que sobrepase el valor IPmax especificado. Si este tiempo es muy corto, el diodo puede conducir hasta este nivel máximo. Estas corrientes son producidas comúnmente por cargas de tipo capacitivo conectadas al diodo. Tiempo de recuperación inversa (trr): Este parámetro es útil cuando el diodo trabaja con tensiones y corrientes que varían rápidamente. Este parámetro indica el tiempo máximo que demora el diodo en bloquearse al sufrir una súbita polarización inversa. Durante estos instantes el diodo actúa como un condensador que se descarga. CIRCUITOS DE RECTIFICACIÓN MONOFÁSICA DE MEDIA ONDA Y DE ONDA COMPLETA: Hay dos tipos básicos de rectificador monofásico: - El rectificador de media onda, y - El rectificador de onda completa. El rectificador de onda completa puede ser, a su vez, con toma central y tipo puente. 25
Electrónica Analógica I RECTIFICADOR DE MEDIA ONDA: En el siguiente gráfico se muestra un rectificador de media onda con carga resistiva: Los siguientes gráficos muestran las formas de onda de la tensión de entrada (Vin), la tensión en la carga (VL)y la corriente en la carga (IL): La siguiente ecuación da la serie de Fourier de la tensión de salida. Vm Vm 2Vm ∞ cos (kwt) VL(t) = ‐‐‐‐‐ + ‐‐‐‐‐‐‐ sen (wt) ‐ ‐‐‐‐‐‐‐‐ ∑ ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ π 2 π k = 2, 4, ... (k + 1)(k ‐ 1) Podemos observar que el nivel de continua que entrega el rectificador es: VLDC = Vm / π Y que el primer armónico tiene la misma frecuencia que la entrada. 26
Electrónica Analógica I A continuación se muestra un rectificador de media onda con carga inductiva: Los siguientes gráficos muestran las formas de onda de la tensión de entrada, la tensión en la carga y la corriente en la carga: Se observa que la inductancia obligará al diodo a seguir conduciendo a pesar que la tensión de entrada cambia de polaridad. RECTIFICADORES DE ONDA COMPLETA: En el siguiente esquema se muestran los dos tipos de rectificadores monofásicos de onda completa con carga resistiva: 27
Electrónica Analógica I Los siguientes gráficos muestran las formas de onda de la tensión de entrada, (Vin), la corriente de entrada (Iin), la tensión en la carga (VL)y la corriente en la carga (IL): Podemos observar que si el puente tiene una carga resistiva, la corriente de entrada (Iin) es sinusoidal y está en fase con la tensión (Vin). Esto significa factor de potencia igual á 1. La siguiente ecuación da la serie de Fourier de la tensión de salida. 2Vm 4Vm ∞ cos (kwt) VL(t) = ‐‐‐‐‐‐‐ ‐ ‐‐‐‐‐‐‐‐ ∑ ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ π π k = 2, 4, ... (k + 1)(k ‐ 1) Podemos observar que el nivel de continua que entrega el rectificador es el doble que el de media onda: VLDC = 2Vm / π Y que el armónico menor es el segundo y tiene el doble de la frecuencia de la entrada. En el siguiente esquema se muestran los dos tipos de rectificadores monofásicos de onda completa, con carga puramente inductiva: 28
Electrónica Analógica I IL
D1
D1
IL
LL
AC
-
VL
+
D2
VL
LL
AC
-
+
D3
D4
D2
RECTIFICADOR CON TOMA CENTRAL
RECTIFICADOR TIPO PUENTE
Los siguientes gráficos muestran las formas de onda de la tensión de entrada, (Vin), la corriente de entrada (Iin), la tensión en la carga (VL)y la corriente en la carga (IL): Se observa que la corriente en la carga inductiva aumentará continuamente; esto se debe al contenido de continua de la tensión de salida. También la corriente de entrada (Iin) aumentará, continuamente, tendrá armónicas y no estará en fase con la entrada. Esto significa que el circuito introduce armónicas a la fuente de AC y el factor de potencia se deteriora. ESPECIFICACIONES DE LOS RECTIFICADORES Los rectificadores pueden ser descritos mediante un conjunto de parámetros que permiten compararlos y con los cuales podemos determinar al más adecuado para la aplicación que se desea. 29
Electrónica Analógica I Estos parámetros son los siguientes: 1) VOLTAJE PROMEDIO EN LA CARGA (VLDC) Es el voltaje continuo que llega a la carga. Se halla mediante la siguiente expresión: 2π
T
1
1
V LDC = ∫ V L (t )dt =
V L (φ )dφ T 0
2π ∫0
2) CORRIENTE PROMEDIO EN LA CARGA (ILDC) Es la corriente continua que llega a la carga. Se halla mediante la siguiente expresión: T
I LDC =
3) 4) 1
1
I L (t )dt =
∫
T 0
2π
2π
∫I
L
(φ )dφ 0
POTENCIA DC PROMEDIO EN LA CARGA (PLDC) Es la potencia en DC que llega a la carga. Se halla mediante la siguiente expresión: PLDC = V LDC I LDC VOLTAJE EFICAZ EN LA CARGA (VLef) Es la tensión total que llega a la carga, incluyendo los armónicos. Se halla mediante la siguiente expresión: T
V Lef
5) 1
V L2 (t )dt =
=
∫
T 0
1
2π
2π
∫V
2
L
(φ )dφ 0
CORRIENTE EFICAZ EN LA CARGA (ILef) Incluye la corriente DC y los armónicos que llega a la carga. Se halla mediante la siguiente expresión: T
I Lef =
1 2
i L (t )dt =
T ∫0
30
1
2π
2π
∫i
0
2
L
(φ )dφ 6) Electrónica Analógica I POTENCIA AC PROMEDIO EN LA CARGA (PLAC) Es la potencia en la carga producida por todas las corrientes y tensiones (DC y armónicos. Se halla mediante la siguiente expresión: PLAC = VLef I Lef
7) EFICIENCIA (η) Es la relación entre las potencias DC y AC que llegan a la carga. El valor máximo es 100%. η=
8) PLDC
PLAC
TENSIÓN EFICAZ DEL RIZADO EN LA CARGA (VLR) Es la tensión eficaz de todos los armónicos que llegan a la carga. No incluyen a la tensión continua. Se halla mediante la siguiente expresión: 2
2
VLR = VLef
− VLDC
9) FACTOR DE FORMA (FF) Es la relación de la tensión eficaz en la carga con la tensión DC en la carga. Se halla mediante la siguiente expresión: FF =
10) VLef
VLDC
FACTOR DE RIZADO (r) Es la relación de la tensión eficaz del rizado, sin incluir la DC y la tensión continua en la carga. Se halla mediante la siguiente expresión: 2
2
V Lef
− V LDC
V LR
r=
=
= ( FF ) 2 − 1 V LDC
V LDC
11) FACTOR DE UTILIZACIÓN DEL TRANSFORMADOR (TUF) Es la relación de la potencia continua en la carga y la potencia disponible en el transformador. Se halla mediante la siguiente expresión: 31
Electrónica Analógica I TUF =
PLDC
VS I S
12) VS = Tensión eficaz en el secundario. IS = Corriente eficaz en el secundario. DISTORSION ARMONICA (THD): La distorsión nos relaciona el valor eficaz o (la amplitud) de una armónica respecto al valor eficaz (o amplitud) de la fundamental, expresada en porcentaje. Tomando como ejemplo la serie de Fourier del rectificador de media onda con carga resistiva: V L (t ) =
Vm
π
+
Vm
2V
2V
2V
sen(ωt ) − m cos(2ωt ) − m cos(4ωt ) − m cos(6ωt ).... 2
3π
15π
35π
Vemos que la distorsión de segunda armónica referida a la armónica fundamental es: D2a = (4Vm / 3π) / Vm = 4 / 3π = 42.44% La distorsión de cuarta armónica referida a la armónica fundamental es: D4a = (4Vm / 15π) / Vm = 4 / 15π = 8.49% Comúnmente se emplea la distorsión armónica total (THD) como: THD = [V2m2 + V3m2 + V4m2 + ....] 1/2 / Vm]x 100% Donde: Vm = Amplitud de la primera armónica V2m = Amplitud de la segunda armónica V3m = Amplitud de la tercera armónica V4m = Amplitud de la cuarta armónica .... 32
Electrónica Analógica I PROBLEMA 1.5: Halle los parámetros del rectificador de media onda con carga resistiva. +
RL
220 V , 60Hz
VLdc
-
SOLUCIÓN: 1) Voltaje promedio en la carga (VLDC) T Vm = tensión pico de entrada VLDC = (1 / T) ∫VL(t)dt = Vm / π 0
2) Corriente promedio en la carga (ILDC) T ILDC = (1 / T)∫iL(t)dt = Vm / (πRL) 0 3) Potencia dc promedio en la carga (PLDC) PLDC = VLDC ILDC PLDC = V2m /( π 2 RL) 4) Voltaje eficaz en la carga (VLef) T VLef = √(1 / T)∫V2L(t)dt = Vm / 2 0 5) Corriente eficaz en la carga (ILef) Incluye la corriente DC y los armónicos. Se halla mediante la siguiente expresión: T 2
ILef = [(1 / T) ∫i L(t)dt]1/2 = Vm / (2RL) 0 33
Electrónica Analógica I 6) 7) Potencia AC promedio en la carga (PLAC) PLAC = VLef ILef = V2m / (4RL) Eficiencia (η) Es la relación entre las potencias DC y AC que llegan a la carga. El valor máximo es 100%. 8) 9) PLDC V2m / π 2 RL 4 η = ‐‐‐‐‐‐‐‐ = ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ = ‐‐‐‐‐ = 40.53% PLAC V2m / 4RL π 2 Tensión eficaz del rizado en la carga (VLR) VLR = √V2Lef ‐ V2LDC = 0.3856 Vm Factor de forma (FF) Es la relación de la tensión eficaz en la carga con la tensión DC en la carga. Se halla mediante la siguiente expresión: VLef Vm / 2 π FF = ‐‐‐‐‐‐‐‐‐‐ = ‐‐‐‐‐‐‐‐‐‐‐‐ = ‐‐‐‐‐ = 1.57 VLDC Vm / π 2 10) Factor de rizado (r) VLR [V2Lef ‐ V2LDC]1/2 r = ‐‐‐‐‐‐‐‐‐‐ = ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ = [(1.57)2 ‐ 1]1/2 = 1.21 VLDC VLDC 11) Factor de utilización del transformador (TUF) PLDC V2m / π 2 RL TUF = ‐‐‐‐‐‐‐‐‐‐ = ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ = 28.66 % VS IS (Vm / √2)(Vm /2 RL) 34
Electrónica Analógica I PROBLEMA 1.6: Halle los parámetros del rectificador de onda completa con carga resistiva. IL
D1
+
D2
VL
RL
AC
-
D3
D4
SOLUCIÓN: 1) Voltaje promedio en la carga (VLDC) T VLDC = (1 / T) ∫VL(t)dt = 2Vm / π Vm = tensión pico de entrada 0
2) Corriente promedio en la carga (ILDC) T ILDC = (1 / T)∫iL(t)dt = (2Vm) / (π RL) 0 3) Potencia dc promedio en la carga (PLDC) Es la corriente DC que llega a la carga. Se halla mediante la siguiente expresión: PLDC = VLDC ILDC PLDC = (4V2m) / (π 2 RL) 4) Voltaje eficaz en la carga (VLef) Es la tensión DC que llega a la carga. Se halla mediante la siguiente expresión: T VLef = √(1 / T)∫V2L(t)dt = (Vm) / (√2) 0 5) Corriente eficaz en la carga (ILef) Incluye la corriente DC y los armónicos. Se halla mediante la siguiente expresión: 35
Electrónica Analógica I 6) 7) T ILef = √(1 / T)∫i2L(t)dt = Vm / (√2 RL) 0 Potencia AC promedio en la carga (PLAC) PLAC = VLef ILef = (V2m) / (2RL) Eficiencia (η) Es la relación entre las potencias DC y AC que llegan a la carga. El valor máximo es 100%. PLDC 4V2m / π 2 RL 8 η = ‐‐‐‐‐‐‐‐ = ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ = ‐‐‐‐‐ = 81.06% 2
2 PLAC V m / 2RL π
8) 9) 10) Tensión eficaz del rizado en la carga (VLR) VLR = [V2Lef ‐ V2LDC]1/2 = [V2m / 2 ‐ 4 V2m / π2]1/2 = 0.095 Vm Factor de forma (FF) Es la relación de la tensión eficaz en la carga con la tensión en la carga. Se halla mediante la siguiente expresión: Vm / √2 π VLef FF = ‐‐‐‐‐‐‐‐‐‐ = ‐‐‐‐‐‐‐‐‐‐‐‐ = ‐‐‐‐‐‐‐‐‐ = 1.11 VLDC 2Vm / π 2√2 Factor de rizado (r) [V2Lef ‐ V2LDC]1/2 r = VLR / VLDC = ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ = [(1.11)2 ‐ 1]1/2 = 0.234 VLDC 11) Factor de utilización del transformador (TUF) PLDC 4V2m / π 2 RL 8 TUF = ‐‐‐‐‐‐‐‐‐‐ = ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ = ‐‐‐‐‐‐ = 81.06 % VS IS (Vm / √2)( Vm / √2 RL) π 2 36
Electrónica Analógica I CURVA DE REGULACIÓN: Cuando la resistencia de carga es menor, la tensión DC disminuye debido a la resistencia que tienen el devanado del transformador y los diodos rectificadores. Si se hace un gráfico de la tensión DC en la carga vs. la corriente DC en la carga, tendrá la forma siguiente: VLDC
0
ILmax
IL
Por ejemplo, la ecuación de la curva de regulación de un rectificador de media onda es: Vm VLDC = ‐‐‐‐‐‐ ‐ ILDC Rf π Rf es la suma de la resistencia del devanado del transformador y la resistencia dinámica del diodo. Para un rectificador de onda completa, la ecuación de la curva de regulación: 2Vm VLDC = ‐‐‐‐‐‐‐‐ ‐ ILDC Rf π PROBLEMA 1.7: Se requiere un rectificador de onda completa para alimentar una carga con 400 VDC y 40 A, a partir de la red de 220 VAC. Determine: a) Las especificaciones de los diodos b) Las especificaciones del transformador SOLUCIÓN: La tensión pico del secundario del transformador la hallamos con la a) ecuación de la tensión promedio para el rectificador de onda completa: 37
Electrónica Analógica I 2Vm VLDC = ‐‐‐‐‐‐ = 400 π b) Luego: Vm = 400 π / 2 = 628.32 V Como en el rectificador de onda completa cada pareja de diodos conduce en forma alternada con los otros dos, cada pareja entregará la mitad de la corriente DC a la carga. Luego: IDC = 20 A Especificación de los diodos: Tensión inversa de pico repetitivo> 628.32 V Corriente promedio > 20 A Corriente directa de pico repetitivo> 628.32 / 10 = 62.8 A Podemos partir del factor de utilización del transformador en el rectificador de onda completa: 400*40 PLDC TUF = ‐‐‐‐‐‐‐‐‐‐ = ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ = 0.8106 VS IS (Vm / √2)( Vm / √2 RL) Luego: Vs*Is = 400*40 /0.8106 = 19 378,47 W La tensión eficaz del secundario es: Vs = Vm / √2 = 444.29 V La corriente eficaz del secundario es: Is = 19 378,47 / 444.29 = 43.62 A La potencia del transformador es: Ps = 19 378,47 W CIRCUITOS ENCLAVADORES O DE FIJACIÓN: Son circuitos cuyo objetivo es desplazar una onda alterna en un nivel positivo o negativo de tensión continua. En la siguiente figura se muestra un ejemplo: 38
Electrónica Analógica I C1
Vg
D1
R
+
Vo
-
Durante el semiciclo negativo de la entrada, Vg, C1 se carga, prácticamente, al valor pico de la alterna de entrada. Si la constante de tiempo (RC1) es mucho mayor que el período de la onda, el condensador no se descargará apreciablemente durante el semiciclo positivo de Vg y, en la salida, la alterna se presentará desplazada en un nivel DC prácticamente igual al valor pico de la tensión Vg. DOBLADOR DE TENSIÓN: Es un circuito que recibe una tensión alterna y entrega una tensión continua cuyo voltaje es el doble del valor pico de la alterna. Está formado por un circuito fijador y un detector de picos. Pueden ser: • De media onda: Podemos observar, en la siguiente figura, que está formado por un fijador de tensión y un detector de pico. Durante el semiciclo positivo conduce D1 y el condensador C1 se carga al voltaje pico de la alterna. Durante el semiciclo negativo conduce D2 y el condensador C2 se carga al doble del voltaje pico de la alterna. • De onda completa: Podemos observar, en la siguiente figura, que el de onda completa está formado por 2 detectores pico. En el doblador de onda completa, en el semiciclo positivo conduce D1 y el condensador C1 se carga al pico de la alterna. En el semiciclo negativo conduce D2 y el condensador C2 se carga al voltaje pico de la alterna. Al sumar las tensiones en C1 y C2 el voltaje se ha duplicado. 39
Electrónica Analógica I C1
Vp
D1
D2
C2
Vs
D1
+
RL Vo
-
C1
Vs
RL
C2
D2
+
Vo
-
DOBLADOR DE MEDIA ONDA
DOBLADOR DE ONDA COMPLETA
El voltaje de salida no llega instantáneamente al doble del valor pico, sino que subirá su valor gradualmente y alcanzará el doble después de unos cuantos ciclos. El voltaje de salida es una tensión continua. Es posible obtener voltajes mayores empleando varios circuitos de este tipo en cascada. Invirtiendo ambos diodos se obtienen voltajes con polaridad opuesta. PROBLEMA 1.8: En el circuito de la figura, los diodos son ideales. Halle: a) La gráfica de la forma de onda de VL. b) El voltaje pico del rizado en VL. c) El voltaje promedio de VL. 40 uF
50K
40 uF
220V 60Hz
+
VL
-
40
Electrónica Analógica I Solución: a) La gráfica de la forma de onda de VL. A: c2_2
700.0 V
500.0 V
300.0 V
100.0 V
-100.0 V
0.000ms
b) c) 50.00ms
100.0ms
150.0ms
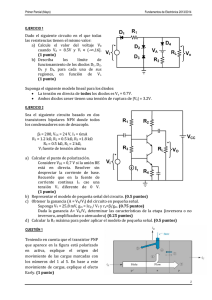
El voltaje pico del rizado en VL. El voltaje máximo en la salida es: Vm = 2 (220)√2 = 622.25 El período de la onda de entrada es: T = 1 / 60 = 16.67 ms Despreciando el tiempo de carga y asumiendo que el tiempo de carga es prácticamente igual al período, hallamos el voltaje al que se descarga el condensador: V1 = 622.25 Є ‐ 16.67 / 2000 = 617V El voltaje pico‐pico del rizado es: Vr = 622.25 – 617 = 5.25V Vr / 2 = 2.625 V El voltaje pico de rizado es: El voltaje promedio de VL. El voltaje promedio en la carga es: VLDC = 619.6 V VLDC = 622.25 – Vr / 2 LIMITADORES: Son circuitos cuyo objetivo es evitar que una señal sobrepase el nivel de tensión deseado. Puede limitarse un pico de la señal o ambos. En la siguiente figura se muestran algunos tipos de limitadores: 41
Electrónica Analógica I R
R
D
D
Vi
D
RL
Vi
RL
VCC
VCC
LIMITADOR DE PICO POSITIVO
VCC
LIMITADOR DE PICO POSITIVO Y NEGATIVO
Las fuentes de tensión DC pueden ser reemplazadas por diodos zener o por resistencias. 42
Electrónica Analógica I UNIDAD TEMÁTICA No.2 FILTROS: Los filtros son circuitos que dejan pasar frecuencias dentro de un determinado rango. Fuera de este rango, atenúan las señales o sus armónicas. TIPOS DE FILTROS: Podemos clasificarlos según el rango de frecuencias que dejan pasar. Entre ellos tenemos: Filtro pasa bajo: Dejan pasar las frecuencias que están por debajo de un determinado valor (fL) Filtro pasa alto: Dejan pasar las frecuencias que están por encima de un determinado valor (fH) Filtro pasa banda: Dejan pasar las frecuencias que están entre un rango de valores (fL y fH) Filtro de rechazo de banda (Notch): Rechazan las frecuencias que estén entre un rango de valores (fL y fH) Filtro pasa todo (o desfasador): Dejan pasar todas las frecuencias, pero producen desfasaje. Se le emplea como desfasador. FAMILIAS DE FILTROS: La función de transferencia de un filtro pasa bajo tiene la forma siguiente: H(s) = N(s) / D(s) N(s) y D(s) son polinomios en s Hay muchas familias de filtros. Cada filtro de una familia posee una función de transferencia única. La localización y complejidad de los polos y ceros de la función de transferencia definen por completo la respuesta del filtro. La mayor parte de los requisitos que debe cumplir un filtro se satisfacen eligiendo cualquiera de las siguientes familias: 43
Electrónica Analógica I 1) 2) 3) 4) Butterworth: Sus polos caen dentro de una circunferencia de radio 1 dentro del plano complejo. El filtro pasa bajo no tiene ceros. Poseen características transitorias relativamente buenas. Su respuesta en frecuencia es bastante plana y su atenuación es con pendiente relativamente acentuada. Se pueden diseñar con componentes de valores prácticos con tolerancias poco críticas Chebyshev: Presentan una pendiente de atenuación más aguda que el Butterworth, pero, su respuesta no es plana y presenta rizado; además su respuesta transitoria no es tan buena como los Butterworth. El filtro pasa bajo no tiene ceros. La mayor amplitud del rizo hace que la atenuación sea más aguda, pero su respuesta a los transitorios empeora. Sus polos se localizan en una elipse en el plano complejo. Bessel: Se emplean para la reproducción fiel de la onda de entrada. Ofrecen, para ello, un retardo constante en la banda pasante. El filtro pasa bajo no tiene ceros. Su respuesta en frecuencia no es tan buena como los de las familias anteriores, pero sus excelentes propiedades transitorias lo hacen muy útil. Función elíptica: Su función de transferencia posee polos y ceros; esto permite que su pendiente de atenuación sea incluso más aguda que la de la familia Chebyshev, pero presenta rizado tanto en la banda pasante como en la rechazada. Sus circuitos son más complejos, pero requieren menos secciones para una atenuación dada. Para construir una fuente de alimentación necesitamos quedarnos sólo con la componente DC que produce el rectificador y debemos eliminar todos los armónicos. Por esta razón, estas fuentes requieren filtros pasa bajo. La frecuencia de corte de estos filtros debe ser menor que la del armónico más bajo. FILTROS PASA BAJO: Los filtros pasabajo más usados en las fuentes de alimentación son: 44
FILTRO POR CONDENSADOR Es el más usado para corrientes pequeñas o medianas debido a su sencillez y bajo costo. Su funcionamiento se basa en que el condensador almacena energía cuando el diodo conduce y luego la entrega a la carga cuando el diodo no conduce. Si la capacidad es grande, no se descarga demasiado y tiende a mantener la tensión constante en la salida. Uno de sus principales inconvenientes es que hace conducir corrientes muy intensas a los diodos durante pequeños intervalos de tiempo. Si la capacidad aumenta o la resistencia de carga disminuye, el diodo conduce una corriente pico más alta. Las corrientes de entrada tipo impulso que genera, pasan a la red AC haciendo aumentar su contenido de armónicos y afectan al factor de potencia. En el caso de un rectificador de onda completa: D2
D1
VAC
RL
+
C
60 Hz
D3
D4
En la siguiente gráfica se ve la forma de onda de corriente que entrega la fuente AC (de 17 voltios pico), para una capacidad de 2200μF y una carga de 100Ω: 45
Electrónica Analógica I Puede observarse que la corriente de entrada no es sinusoidal y posee un alto contenido de armónicas. Análisis aproximado del filtro por condensador: Como el condensador entrega energía a la carga cuando los diodos no conducen, una forma práctica de hacer que la tensión en la carga sea más constante y disminuya el rizado es hacer: RLC >> T/2 para el rectificador de onda completa ó RLC >> T para el rectificador de media onda En el gráfico anterior se muestra la forma de variación del rizado en la carga y se ve que podemos representar el rizado como segmentos debido a que la constante de tiempo es grande. El flanco de subida corresponde a los instantes que el condensador carga y los diodos conducen; el flanco de bajada corresponde a los instantes en que el condensador se descarga y los diodos no conducen. : VL
T1
T2
Vm
Vr
Vldc
0
t
Los diodos conducen y el condensador se carga durante el tiempo T1 y los diodos no conducen y el condensador se descarga durante el tiempo T2. Hallaremos inicialmente el factor de rizado y luego la curva de regulación: Como el circuito es un rectificador de onda completa, Se cumple: 46
T/2 = T1 + T2 Vr es el voltaje pico ‐ pico del rizado. Vm es el voltaje pico de la tensión de entrada. La tensión DC en la carga se puede expresar como: VLDC = Vm – Vr/2 El voltaje eficaz de la onda triangular del rizado es dado por: VLr = Vr/(2√3) Durante el tiempo T2, el condensador se descarga en forma prácticamente lineal: Usando la ecuación del condensador: ∆Q = C ∆V = C Vr Entonces: ∆Q/T2 = C Vr/T2 = ILDC ILDC es la corriente continua en la carga. Podemos despejar Vr de esta ecuación: Vr = ILDC T2 / C Reemplazando en el voltaje eficaz: VLr = ILDC T2 /(2√3)C Comúnmente se cumple: T2 >> T1 Entonces: T2 = T/2 Además: VLDC = ILDC RL Reemplazando: 1 r = ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ (4√3)f C RL Podemos hallar también la ecuación de la curva de regulación: VLDC = Vm – ILDC /(4 f C) Estas ecuaciones nos sirven para hacer el diseño del filtro. PROBLEMA 2.1: Se quiere diseñar un rectificador con filtro por capacidad para alimentar una carga con 12Vdc y 1 A con rizado no mayor del 5%, empleando un rectificador de onda completa con toma central. Determine la capacidad necesaria, la especificación del rectificador y la tensión de entrada AC. SOLUCIÓN: Como nos indican el rizado: 1 0.05 = ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ (4√3)f C RL 47
Electrónica Analógica I La frecuencia AC es 60 Hz RL = 12V / 1A = 12Ω 1 Hallamos C: C = ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ = 4009 μF (4√3)(0.05)f RL El valor comercial más cercano es 4700μF. También podemos poner 2 capacidades de 2200μF en paralelo. Adoptaremos esta última solución. De la curva de regulación hallamos la tensión pico AC necesaria: VLDC = Vm – ILDC /(4 f C) Vm = VLDC + ILDC /(4 f C) = 12 + (1) / (4)(60)(4400*10‐6) = 12.95V El valor eficaz de la tensión de entrada es: Vs = 12.95/√2 = 9.16V El diodo rectificador necesario deberá ser capaz de conducir la mitad de la corriente promedio de la carga: 0.5 A. Su tensión inversa es el doble del voltaje pico de entrada: 26V La capacidad debe soportar una tensión máxima igual al voltaje pico de entrada: 12.95V Los componentes elegidos deberán soportar más que los valores calculados para que puedan tener un mayor tiempo de vida útil. FILTRO POR INDUCTANCIA Este tipo de filtro se usa mucho en equipos cargadores de baterías para corrientes medias y altas. Partimos de la serie de Fourier de la salida del rectificador de onda completa: 2Vm 4Vm 4Vm 4Vm VL(t) = ‐‐‐‐‐‐‐ ‐ ‐‐‐‐‐‐‐ cos (2wt) ‐ ‐‐‐‐‐‐‐‐ cos (4wt) ‐ ‐‐‐‐‐‐‐‐‐ cos (6wt) ‐ .......... π 3π 15π 35π 48
L
D1
D2
VAC
RL
D5
60 Hz
D3
D4
En este caso, observamos que el armónico de frecuencia más baja es el segundo. Los armónicos superiores tienen menor amplitud. La corriente en la carga se puede expresar como: 2Vm 4Vm 4Vm 4Vm iL(t) = ‐‐‐‐‐‐‐ ‐ ‐‐‐‐‐‐‐‐‐‐ cos (2wt) ‐ ‐‐‐‐‐‐‐‐‐‐‐ ‐ cos (4wt) ‐ ‐‐‐‐‐‐‐‐‐‐‐ cos (6wt) ‐ ..... πZ(0) 3 πZ(2w) 15 πZ(4w) 35 πZ(6w) Z(0) es la impedancia de carga del rectificador en DC = RL Z(2w) es la impedancia de carga del rectificador a la frecuencia 2w = RL + j2wL Z(4w) es la impedancia de carga del rectificador a la frecuencia 4w = RL + j4wL Z(8w) es la impedancia de carga del rectificador a la frecuencia 6w = RL + j6wL Vemos que la bobina aumenta su reactancia conforme aumenta la frecuencia del armónico. Además el armónico disminuye su amplitud conforme aumenta su frecuencia. Por ello, podemos tomar sólo los dos primeros términos de la serie y despreciar los demás para hacer un análisis aproximado. Un criterio práctico es elegir L de manera que cumpla: L >> RL/2w Podemos hallar, a continuación, el factor de rizado: 49
Electrónica Analógica I L
D5
(4Vm/3π) cos(2wt)
RL
+
2Vm/π
-
El voltaje eficaz del rizado en la carga se puede hallar con la expresión: 4Vm 2VLDC VLr = ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ = ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ (3√2)π√(1 + (2wL/RL)2) (3√2)√(1 + (2wL/RL)2) Luego, el factor de rizado es: 2 r = ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ (3√2)√(1 + (2wL/RL)2) Podemos hallar también la ecuación de la curva de regulación: 2Vm VLDC = ‐‐‐‐‐‐‐‐ ‐ ILDC Rf π Rf es la resistencia total formada por la resistencia del transformador, de los diodos y de la bobina. Estas ecuaciones nos sirven para hacer el diseño del filtro. El diodo D5 es un diodo volante. Se emplea para protección del rectificador. Cuando hay una variación brusca de la corriente en la bobina, se produce en ella un pico de tensión que puede ser excesivo para los diodos del rectificador y dañarlos. El diodo volante evita este pico de tensión. Su tensión inversa es la tensión pico del voltaje AC y su corriente promedio se puede especificar como 1/3 de la corriente promedio de salida. 50
FILTRO L‐C Es otro filtro muy usado para corrientes medias y altas, especialmente en reguladores de tensión con SCR. La inductancia evita el paso de los armónicos y deja pasar la continua. El condensador evita que los armónicos lleguen a la carga, actuando ante ellos como una reactancia pequeña y como circuito abierto para la continua.. A continuación se muestra un circuito de estos con rectificador de onda completa con toma central. D1
L
n:1
D3
Vs
VAC
C
RD
Vs
RL
+
VL
-
D2
Análisis aproximado del filtro L‐C Al igual que en el filtro por inductancia podemos considerar sólo la DC y el segundo armónico, despreciando los demás. De esta manera, llegamos al siguiente circuito equivalente: L
(4Vm / 3pi)cos(2wt)
D3
+
C
RD
RL
+
2Vm / pi
-
Un criterio práctico para diseñar el filtro es hacer: 51
XC << RL // RD y XL >> XC Electrónica Analógica I La curva de regulación puede obtenerse para DC como: 2Vm VLDC = ‐‐‐‐‐‐‐‐ ‐ ILDC Rf π Rf representa la resistencia del transformador (RT) más la resistencia dinámica de los diodos (rd) y la resistencia DC de la bobina (rL): Rf = RT + n rd + rL n = 1, para el rectificador de onda completa con toma central. n = 2, para el rectificador de onda completa tipo puente. Para hallar una expresión del factor de rizado, primero hallamos la tensión eficaz del rizado en la carga y luego la tensión DC en la carga. 4Vm XC (√2)VLDC XC VLr = ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ = ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ (3√2)π(XL + XC) 3 XL Luego: √2 r = ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ (3)(2wL)(2wC) Para: f = 60Hz 0.83x10‐6 r = ‐‐‐‐‐‐‐‐‐‐‐‐‐‐ L en Henrys y C en Faradios LC Inductancia crítica (LC) Si no hay inductancia, el filtro actúa como por entrada a condensador y los diodos conducirán corrientes pulsantes sólo unos instantes y el resto del tiempo no conducirán. Si se pone una inductancia pequeña, los diodos conducirán un tiempo un poco mayor, pero aún habrán instantes en que la corriente sea cero en los diodos. Si seguimos aumentando la inductancia, llegará el momento en que la corriente en los diodos no será cero en ningún instante y el filtro actuará como un verdadero filtro L‐C. Al valor de inductancia que hace que la corriente en los diodos no sea cero, se le llama inductancia crítica. Esta condición se cumple aproximadamente cuando: 52
VLDC 2Vm 4Vm ‐‐‐‐‐‐‐‐‐ = ‐‐‐‐‐‐‐‐‐‐‐‐‐‐ ≥ ‐‐‐‐‐‐‐‐ RL//RD π (RL//RD) 3π XL Luego: 2 (RL//RD) XL ≥ ‐‐‐‐‐‐‐‐‐‐‐‐ 3 Para el segundo armónico: RL//RD LC ≥ ‐‐‐‐‐‐‐‐‐‐‐ 3w Para: f = 60Hz: RL//RD LC = ‐‐‐‐‐‐‐‐‐‐ 1131 Debemos elegir una inductancia que cumpla: RL//RD L > ‐‐‐‐‐‐‐‐‐‐‐ 1131 Resistencia de drenaje Vemos que la inductancia crítica depende del valor de RL, de manera que si RL aumenta, la inductancia crítica también; lo que significa que si la carga varía, la inductancia que habremos puesto puede llegar a no ser suficiente. Para evitar este inconveniente, se emplea la resistencia de drenaje RD. Esta resistencia queda conectada y en ningún momento se desconecta o varía. De esta manera, aunque se desconecte la carga, no hay riesgo que la inductancia crítica aumente. La resistencia de drenaje debe elegirse de manera que no disipe demasiada potencia y, a la vez, impida la elevación de la inductancia crítica PROBLEMA 2.2: Diseñe un rectificador tipo puente con filtro L‐C para obtener una tensión de 65VDC y 10 A, con factor de rizado de 0.1%. Especifique todos los componentes y la tensión de entrada al rectificador. ¿Cuál es el voltaje pico de rizado en la carga? Asuma: Rt = 0.1Ω , Rb = 0.1Ω 53
Electrónica Analógica I SOLUCIÓN: Esquema del circuito: L
D1
220V +/- 10%
D2
D5
Vs
D3
C
RD RL
+
65 V
-
D4
Hallamos la resistencia de carga: RL = 65V / 10 A = 6.5Ω Elegimos RD = 10 RL = 65Ω Hallamos la inductancia crítica: Lc = RD / 1131 = 57.5 mH Hemos asumido el peor caso, cuando RL es desconectada. Elegimos L > Lc L = 60mH Hallamos C de la ecuación del factor de rizado: 0.001 = 0.83x10‐6 / LC ‐6
C = 13,800 µF C = 0.01 = 0.83x10 / (60mH)( 0.001) = 13,800 µF Tensión de entrada al rectificador: 65 = (2Vm / π) – (10)(0.1 + 0.1) Despejando Vm: Vm = (65 – 2)(π) / 2 = 98.96V Le aumentamos la caída directa en 2 diodos: Vp = 100.36V 54
El voltaje eficaz del secundario será: Vs = Vp / (2)1/2 = 71V Vs = 71V Especificaciones: Condensador: 13,800µF / 65V Bobina: 60mH / 10 A Diodos: 5 A / 10.36 V Diodo volante: 4 A / 65 V Resistencia de drenaje: 65Ω / 65 W Transformador: 220V á 71V / 750W Voltaje pico del rizado en la carga: Reactancia de la bobina al segundo armónico: XL = (2)(π)(120)(60mH) = 45.24Ω Reactancia del condensador al segundo armónico: XC = 1 / (2)(π)(120)(0.0138) = 0.1Ω El voltaje pico del segundo armónico a la salida del rectificador es V2 = 4Vm / 3π El Luego: V2 = 42V La tensión pico del rizado en la carga es: Luego: V2L = 42(0.1) / (45.14) = 0.09V V2L = 0.09V FILTRO DE L–C DE VARIAS SECCIONES Cuando se quiere mejorar más el filtrado, se pueden emplear dos o más secciones de filtro L‐C en cascada. En el siguiente gráfico se ve uno de dos secciones: L1
D1
T1
L2
C1
Vs
D2
C2
RD
RL
220Vac
Vs
D2
Para el análisis podemos seguir los mismos criterios que para el filtro L‐C y hallar una expresión aproximada para el factor de rizado: 55
Electrónica Analógica I √2 X C1 X C2 √2 r = ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ = ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ 3 XL1 X L2 3(4w2)2 L1C1L2C2 Con las mismas aproximaciones del filtro L‐C se puede extender para un filtro de n secciones iguales: √2 r = ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ (3)(4w2)n (LC)n Para la inductancia crítica basta sólo considerar la bobina L1 FILTRO Π Este filtro permite obtener un rizado muy pequeño. Como emplea condensador de entrada, tiene los mismos inconvenientes que el filtro por capacidad. Se usa cuando se quiere, con el mismo transformador, tener más tensión de salida que la que puede obtenerse con un filtro L‐C y disminuir el rizado. A continuación se muestra un circuito: L1
D1
D2
T1
C1
Vs
C2
Vac
RL
D3
D4
El análisis se puede comenzar a partir de la serie de Fourier del rizado diente de sierra del condensador C1: 56
Vr sen(4wt) sen(6wt) VC1 = VDC ‐ ‐‐‐‐ [sen(2wt) ‐ ‐‐‐‐‐‐‐‐‐‐‐‐‐‐ + ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ ‐ .... ] π 2 3 Además: Vr = ILDC T2 / C1 = ILDC / 2f C1 Despreciando los armónicos superiores, la tensión eficaz del segundo armónico es: Vref = Vr / (π√2) = √2 ILDC XC1 Utilizando los mismos criterios que para el filtro L‐C podemos hallar el factor de rizado: X C1X C2 r = √2 ‐‐‐‐‐‐‐‐‐‐‐‐‐ RLXL1 57
Electrónica Analógica I UNIDAD TEMÁTICA No. 3 EL TRANSISTOR BIPOLAR (BJT) A los dispositivos que se construyen con combinaciones de bloques formados de semiconductores N y P se les llama genéricamente transistores (de: Transfer Resistor). Durante 1945 a 1949 el grupo de la compañía Bell desarrolló la teoría de los transistores, la verificó experimentalmente y fueron construidos diodos y triodos. En el año de 1956 Bardeen, Shockley y Brattain recibieron el Premio Nobel de Física por el brillante trabajo que desembocó en la invención del transistor. Hemos de mencionar que Bardeen recibió en 1972 nuevamente el Premio Nobel de Física, ahora en compañía de J. R. Schrieffer y L. N. Cooper, por haber desarrollado la teoría de la superconductividad. Los transistores tienen varias ventajas sobre los tubos al vacío: •
En primer lugar, para que funcione un tubo al vacío su cátodo debe calentarse, y esto se logra pasando una corriente por un filamento cercano a él. El voltaje típico que se requiere para lograr esto es de 250 V. Una vez conectado este voltaje se necesita esperar determinado tiempo hasta que se caliente el cátodo. Por tanto, cualquier aparato que use tubos al vacío no funciona inmediatamente después de haberse conectado. El transistor no requiere este calentamiento, por lo que empieza a funcionar inmediatamente después de su conexión. En consecuencia, el uso de un transistor en lugar de tubos al vacío ahorra mucha energía, y por tanto, resulta más económico. •
En segundo lugar, la respuesta del transistor a señales de frecuencias muy altas es muy efectiva, lo cual no ocurre con los tubos al vacío. 59
Electrónica Analógica I Como el tamaño de un transistor es mucho menor que el de los tubos al vacío, con él se inició la miniaturización de los aparatos electrónicos. El invento del transistor abrió una nueva era en la civilización moderna, ya que se le pudo utilizar de manera muy general en una gran variedad de aparatos. En las décadas de 1950 y 1960 se construyeron radios, computadoras electrónicas, aparatos de control industrial, etc., que gracias a los transistores adquirieron un tamaño relativamente pequeño, portátiles, con necesidades de energía muy reducidos y de larga vida. En gran medida, en las décadas mencionadas los transistores sustituyeron a los tubos al vacío. Sin embargo, para ciertas aplicaciones muy específicas los tubos han tenido ventajas sobre los transistores. Así, se emplean para transmisores de radio de potencia alta y mediana, para amplificadores de microondas y osciladores, para tubos de rayos catódicos como los que se usan en los televisores, monitores, pantallas de diversos aparatos, en equipos profesionales de audio, etcétera. REPRESENTACIÓN DEL TRANSISTOR BIPOLAR Los siguientes esquemas muestran la representación del transistor en su forma de construcción y símbolo circuital. El transistor PNP se puede interpretar como dos diodos unidos por su cátodo. El transistor NPN se puede interpretar como dos diodos unidos por su ánodo. Estas representaciones permiten idear la forma de probar el buen estado del transistor midiendo las uniones con un multímetro. Sus terminales son denominados: E = Emisor (ingresa las cargas al dispositivo) C = Colector (recibe las cargas que provienen del emisor) B = base (controla el flujo de cargas al colector) Para obtener el efecto amplificador del transistor se hace que la base sea angosta en comparación con las regiones de colector y emisor. Adicionalmente, la concentración de impurezas es menor en la base para lograr que las regiones de transición sean mayores en ella, lo cual permite reducir su ancho efectivo y aumentar la ganancia. 60
P
N
Electrónica Analógica I P
N
C
E
P
N
E
C
B
B
E
E
C
C
B
B
C
C
B
B
PNP
E
NPN
E
Esquemas del transistor bipolar REGIONES DE TRABAJO EN EL TRANSISTOR BIPOLAR: Como el BJT posee dos uniones P‐N y sabemos que ellas pueden ser polarizadas en forma directa o inversa, surgen 4 formas posibles de polarización, las cuales se indican en la siguiente tabla: Je = Juntura de emisor Jc = Juntura de colector TENSION Je VEB > 0, VCB PD > 0 PD = Polarización directa PI = Polarización inversa TRANSISTOR PNP Jc ZONA PD SATURACIÓN CARACTERISTICA Se comporta como interruptor cerrado PI PI CORTE Se comporta como interruptor abierto VEB > 0, VCB PD < 0 PI ACTIVA Se comporta como amplificador VEB < 0, VCB > 0 PD ACTIVA INVERSA VEB < 0, VCB < 0 PI 61
Se comporta como amplificador con muy baja ganancia Electrónica Analógica I TENSION Je VBE > 0, VBC PD > 0 VBE < 0, VBC PI < 0 VBE > 0, VBC PD < 0 VBE < 0, VBC > 0 PI TRANSISTOR NPN Jc ZONA PD SATURACIÓN PI CORTE PI ACTIVA PD ACTIVA INVERSA CARACTERISTICA Se comporta como interruptor cerrado Se comporta como interruptor abierto Se comporta como amplificador Se comporta como amplificador con muy baja ganancia Las zonas de corte y saturación son empleadas comúnmente en los circuitos digitales. La zona activa se emplea comúnmente en circuitos analógicos debido a que ahí el transistor puede amplificar señales. La zona activa inversa se emplea también en algunos tipos de circuitos digitales, tales como las compuertas lógicas TTL Modelo matemático del transistor bipolar: Uno de los modelos muy usados en el análisis de circuitos es el de Ebers‐Moll. Como el transistor es formado por dos uniones P‐N, las ecuaciones tienen la forma de la del diodo, tanto para la unión de emisor como la de colector: IE = [IEBO / (1 ‐ αNαI)](℮VBE/VT‐ 1) + [αIICBO / (1 ‐ αNαI)](℮VBC/VT‐ 1) IC = [αNIEBO / (1 ‐ αNαI)](℮VBE/VT‐ 1) ‐ [ICBO / (1 ‐ αNαI)](℮VBC/VT‐ 1) Además, se tiene mediante las leyes de Kirchhoff: IE = IB + IC VCE = VCB + VBE En la zona activa las ecuaciones de Ebers‐Moll se reducen a: IE = [IEBO / (1 ‐ αNαI)]℮VBE/VT ‐ [αIICBO / (1 ‐ αNαI)] IC = [αNIEBO / (1 ‐ αNαI)]℮VBE/VT + [ICBO / (1 ‐ αNαI)] Definiendo: β = αN / (1 ‐ αN) 62
Electrónica Analógica I Se llega a la siguiente ecuación para IC: IC = β IB + (1 + β)ICBO Curvas del transistor bipolar: El transistor posee un conjunto de curvas que representan la relación entre sus corrientes y tensiones externas. Curva de transferencia: Se emplea como entrada la juntura base‐emisor. Por ello, las curvas de entrada tendrán mucha similitud con la curva del diodo. En realidad son una familia de curvas que dependen de la tensión colector‐emisor, pero se considera una sola porque tienden a estar muy juntas. En la siguiente gráfica se le muestra: CURVA DE TRANSFERENCIA DEL TRANSISTOR
0.09
0.08
0.07
0.06
IE
0.05
0.04
0.03
0.02
0.01
0
0
5
10
15
VBE / VT
20
25
CURVAS DE SALIDA: Las curvas más usadas son la que relacionan IC vs VCE usando como parámetro la corriente de base (IB) 63
Electrónica Analógica I Vemos que posee varias zonas de operación: En la zona de saturación, actúa como interruptor cerrado (tensión pequeña, corriente alta) En la zona de corte, actúa como interruptor abierto (tensión alta, corriente pequeña) En la zona activa actúa como amplificador, Para señales de entrada pequeña se comporta linealmente. En la zona de ruptura maneja tensiones y corrientes altas, con una gran disipación de potencia. Comúnmente se evita trabajar en esta zona para evitar la destrucción del transistor. El punto de operación: Dado que el BJT posee varias zonas de trabajo, es necesario darle una coordenada en base a tensiones y corrientes constantes para ubicarlo en una de ellas. A esta coordenada se le denomina punto de operación (Q). En nuestro curso estudiamos su uso como amplificador. Por ello, debemos ponerlo en la zona activa. Sabemos que, en este caso, debe tener su unión base‐emisor polarizada directamente y su unión base‐colector polarizada inversamente. A este proceso, de darle un punto de operación, se le llama polarización. Métodos de polarización. Comparación entre los diferentes métodos: A continuación veremos diferentes formas de polarizar al transistor. 64
VBC
RC
Electrónica Analógica I VCB
RB
RC
RB
NPN
PNP
VBE
VEB
POLARIZACIÓN BASICA
RB Y RC limitan las corrientes que circulan en el transistor. Este método requiere dos fuentes y por ello no es práctico. Los métodos prácticos son los siguientes: Polarización fija: Este método es sencillo, fácil de diseñar y utiliza sólo una fuente. Su inconveniente está en que el punto de operación varía mucho con la temperatura, es decir, no tiene estabilidad. Esto se debe a la gran sensibilidad de los semiconductores a los cambios de temperatura. Para poder hacer buenos amplificadores, un requisito es que el punto de operación tenga estabilidad térmica. RB
RC
RB
RC
VCC
NPN
VCC
PNP
POLARIZACIÓN FIJA
Polarización Colector‐Base: Este método es un poco más complejo que el anterior, pero posee mejor estabilidad. También utiliza una sola fuente. 65
Electrónica Analógica I RB
RC
RC
RB
VCC
VCC
NPN
PNP
POLARIZACIÓN COLECTOR-BASE
Autopolarizado: Este método es muy usado porque posee muy buena estabilidad térmica, aunque su diseño es más complejo. R1
RC
RC
VCC
NPN
R2
R1
PNP
RE
R2
AUTOPOLARIZADO
VCC
RE
Obsérvese que en el caso de transistores PNP, la fuente de alimentación y las corrientes están invertidas respecto al NPN. Los métodos anteriores permiten otras formas basadas en combinaciones entre ellos: 66
RB
RC
NPN
RB
RC
Electrónica Analógica I RC
RB
VCC
RB
RC
VCC
PNP
RE
VCC
NPN
RE
PNP
RE
VCC
RE
METODOS ALTERENATIVOS
Polarización mediante fuentes de corriente: Estos métodos son muy usados, especialmente en circuitos integrados, porque permiten economizar espacio, muy buena estabilidad y lograr la máxima amplificación. RC
RC
RB
NPN
IC
PNP
VCC
VCC
NPN
IE
RE
IE
IE
RB
VCC
PNP
VCC
RE
POLARIZACION CON FUENTE DE CORRIENTE
Estabilización del punto de operación: Como ya se ha mencionado, es necesario que el punto de operación sea constante y no varíe por efectos de la temperatura, rizado de la fuente de alimentación, cambio de los parámetros del transistor, etc. Las técnicas que permiten estabilizar el punto de operación pueden clasificarse en dos categorías: 1) Técnicas de estabilización: Utilizan circuitos de polarización resistivos que mantienen IC relativamente constante ante variaciones de ICBO, VBE y β. 2) Técnicas de compensación: Utilizan dispositivos sensibles a la temperatura como termistores, transistores, diodos, etc. que entregan corrientes y tensiones de compensación que mantienen al punto de operación prácticamente constante. 67
Electrónica Analógica I Técnicas de estabilización: El punto de operación de un transistor puede variar por cambios sufridos en la corriente inversa de la juntura Colector–Base (ICBO), por las variaciones de la tensión Base‐Emisor (VBE), la ganancia (β), variaciones de la fuente de alimentación, los componentes del circuito. La variación de la corriente de colector debido a estos parámetros podemos expresarla aproximadamente por: ΔIC = SI ΔICBO + SV ΔVBE + Sβ Δβ + SVCC ΔVCC + SR1ΔR1 + .... SI = Factor de estabilidad de corriente. SV = Factor de estabilidad de tensión. Sβ = Factor de estabilidad de ganancia. SVCC = Factor de estabilidad de la fuente. SR1 = Factor de estabilidad de la resistencia R1. ΔIC = Variación total de la corriente de colector. ΔICBO= Variación total de la corriente ICBO ΔVBE = Variación total de la tensión Base‐Emisor Δβ = Variación total de ganancia de corriente ΔVCC = Variación total de fuente de alimentación. ΔR1 = Variación total de resistencia R1 Cada factor de estabilidad puede determinarse asumiendo que las demás variables Se mantienen constantes. El factor de estabilidad SI se obtiene con la siguiente ecuación: SI = ΔIC / ΔICBO , cuando: ΔVBE = 0 y Δβ = 0 Mientras más grande es SI, el punto de operación es más inestable. El mínimo valor posible de SI es 1. Los circuitos que estabilizan el punto de operación respecto a variaciones de ICBO, también se comportan satisfactoriamente ante variaciones de VBE, β, etc. Por ello, basta obtener un buen factor de estabilidad SI. La ecuación general que gobierna la corriente de colector del transistor es: IC = β IB + (1 + β) ICBO 68
Electrónica Analógica I Derivando respecto a IC obtenemos: SI = (1 + β) / (1 – β dIB / dIC) De esta ecuación concluimos que para valores grandes de β, SI se aproxima a la unidad. El término dIB / dIC se obtiene a partir del circuito que utilicemos. Para el cálculo de SI se considera que VBE, β, etc. no varían. Tomemos como ejemplo el circuito autopolarizado, cuyo equivalente de thevenin se encuentra a continuación: R1
RC
NPN
R2
RC
RBB
VCC
NPN
VBB
RE
VCC
RE
RBB = R1//R2
VBB = VCC R2/(R1 + R2) = VCC RBB/R1
En la malla Base‐Emisor podemos plantear la siguiente ecuación: VBB = IB RB + VBE + (IC + IB) RE Derivando esta ecuación respecto a IC: dIB / dIC = ‐ (Re / (Re + RBB)) Reemplazando en la ecuación de SI obtenemos: SI = (1 + RBB / Re) / (1 + (RBB / (1 + β)Re)) Si hacemos: RBB = (1 + β) Re / 10, tendremos: SI = (11 + β) / 11 Para un valor de β = 50 , se tiene: SI = 5.55; el cual es un buen factor, siendo 3 el valor óptimo. También observamos que si β es más grande, el factor de estabilidad empeora. Por ejemplo, si: β = 100, SI = 10.1. En este caso el factor de estabilidad ha aumentado y tendremos que elegir otra relación de RBB con RE para mantener SI pequeño. 69
Electrónica Analógica I Técnicas de compensación: Para obtener mejor regulación y compensación de temperatura con la red resistiva, se puede conectar un diodo entre las base y referencia de los transistores. Estos diodos deben elegirse cuidadosamente para permitir la exacta caída de voltaje necesaria. Pero, si esta polarización cambia con la edad del equipo, la polarización también sufrirá cambios. Si por cualquier motivo (variación de temperatura ambiente, calentamiento del transistor, etc.) la temperatura del transistor varía, esto causa una variación de la tensión base‐emisor (aproximadamente –2.5mV/ºC). Una forma de evitar estos efectos indeseables es haciendo que la tensión de polarización varíe de manera similar a la variación de VBE con la temperatura, lo cual se logra colocando, en paralelo con R2, un termistor NTC (Negative Temperature Coefficient) de similar coeficiente de temperatura que el diodo base‐
emisor. De esta forma la tensión en el termistor disminuirá del mismo modo como VBE disminuye manteniendo siempre la corriente de colector (proporcional a la corriente de base) en un valor casi constante. A continuación se muestran formas típicas de polarización con compensación de temperatura. En la figura a se coloca una resistencia en paralelo con el termistor con el fin de aproximar el coeficiente de temperatura equivalente al del diodo base‐emisor. En la figura b es mostrada la polarización por diodo, estos trabajan polarizados en sentido directo y deben exhibir el mismo coeficiente de temperatura que el correspondiente al diodo base‐emisor del transistor. Se aumenta mucho más la estabilidad contra variaciones de temperatura colocando un resistor en el emisor del transistor (figuras a, b y c). 70
R1
RC
NPN
R1
RC
VCC
NPN
R2
R2
RE
t
Electrónica Analógica I R1
RC
VCC
NPN
RE
Q2
VCC
RE
D
(a)
(b)
(c)
La compensación puede hacerse más efectiva cuando se emplea un transistor regulador. Dado que el punto de operación es difícil de mantener, podemos usar un transistor regulador de voltaje y lograr controlar fácilmente al punto de operación ajustándolo mediante un potenciómetro. En la figura c el transistor Q2 se encarga de controlar en forma precisa el punto de operación del transistor principal, actuando como regulador. También compensa automáticamente contra variaciones de temperatura. Rectas de carga: Recta de carga DC. Recta de carga AC. Para el estudio de los circuitos utilizamos las leyes de Kirchhoff y la ley de Ohm. En el siguiente circuito usado como amplificador: R1
RC
C
VCC
Vg
R2
RE
CE
La corriente de colector está formada por la corriente del punto de operación y la corriente de señal: IC = ICQ + ic En forma análoga para la tensión: VCE = VCEQ + vce 71
Electrónica Analógica I Planteando la ley de Kirchhoff en la malla colector‐emisor: VCC + 0 = ICQ RC + VCEQ + IEQ RE + ic RC + vce Aquí se han considerado muy pequeñas las reactancias de los condensadores a la frecuencia de la señal. Los 3 primeros términos de la derecha son DC y se cumple: VCC = ICQ (RC + (1 + 1 /β)RE) + VCEQ Y recibe el nombre de Recta de carga estática (o DC) Los 2 términos siguientes de la derecha son AC y se cumple: 0 = + ic RC + vce Y recibe el nombre de Recta de carga dinámica (o AC) Lo anterior indica que podemos estudiar al amplificador sólo en DC y luego sólo en AC. Estas ecuaciones pueden ser graficadas en las curvas de salida del transistor y son un par de rectas. Configuraciones del transistor: Emisor común, colector común y base común. El transistor posee 3 terminales y podemos considerarlo como un cuadripolo, siempre que tomemos un terminal común a la entrada y a la salida, como se observa en las siguientes figuras. ic
ib
B
ie
C
+
vce
-
+
vbe
-
E
ie
ib
C
+
vcb
-
+
veb
E
EMISOR COMUN
ic
E
B
B
B
BASE COMUN
E
+
vec
-
+
vbc
-
C
C
COLECTOR COMUN
En cada una de ellas el transistor posee diferentes propiedades, por lo que es necesario estudiarlas. En emisor común (EC): La entrada es la unión base‐emisor y la corriente de base. La salida es entre colector‐emisor y la corriente de colector. 72
Electrónica Analógica I En base común (BC): La entrada es la unión emisor‐base y la corriente de emisor. La salida es en la unión colector‐base y la corriente de colector. En colector común (CC): La entrada es la unión base‐colector y la corriente de base. La salida es entre emisor‐colector y la corriente de emisor. Modelos de baja frecuencia y pequeña señal del transistor: Cuando trabaja en la zona activa, con señales pequeñas, el transistor puede ser representado por un modelo de cuadripolo lineal. Esto podemos explicarlo en la siguiente forma: IE = [IEBO / (1 ‐ αNαI)]℮VBE/VT = IES℮VBE/VT IC = αIEs℮VBE/VT Si: VBE = VBEQ + vbe VBEQ = Tensión DC del punto de operación vbe = Tensión de señal Reemplazando en Ic: Ic = α Ies e(VBEQ + vbe) / VT =α Ies eVBEQ / VT e vbe / VT Si vbe es pequeña señal: Ic = α IEQ e vbe / VT El desarrollo de la exponencial en series de potencia es: ℮x = 1 + x/1! + x2/2! + x3/3! + ..... Si se cumple: x = vbe / VT << 1, la exponencial se puede representar por una recta y el transistor tendrá un comportamiento lineal: e vbe / VT = 1 + vbe / VT Reemplazando: Ic = α IEQ (1 + vbe / VT) = α IEQ + α IEQ vbe / VT = ICQ + gm vbe Donde: gm = transconductancia para pequeña señal = α IEQ / VT ICQ = α IEQ Entonces, para señales pequeñas el transistor se comporta en forma lineal y podemos usar la teoría de cuadripolos lineales para representarlo. 73
Electrónica Analógica I Para tener operación con pequeña señal, debe cumplirse que la amplitud máxima de la señal sea mucho menor que VT: vbe << VT A temperatura ambiente: vbe << 25.8 mV Tomando una relación de 10 á 1: vbe ≤ 2.6 mV Cuando trabajemos con señales pico menores o iguales a 2.6 mV, estaremos trabajando con señales pequeñas. Cuando se pueda aceptar un nivel de distorsión mayor, podremos utilizar más tensión de señal, pero sin sobrepasar los 26 mV a temperatura ambiente. Los modelos de cuadripolos más usados para representar al transistor son los de parámetros híbridos (H), los parámetros admitancia (Y), los parámetros impedancia (Z) y los parámetros K. De estos 4, los más usados son los parámetros híbridos y los parámetros admitancia. MODELO T: El modelo T se caracteriza porque está basado en la estructura física del transistor y permite expandirse al modelo π‐híbrido (o de Giacoletto). El modelo se muestra a continuación, para el caso de un transistor NPN: C
C
C
N
B Ib
B
Ib
P
B
Ib
B Ib
B
Ib
N
E
(A)
re
E
E
(B)
(C)
En la figura (A) se muestra la forma de construcción del transistor. Cuando el transistor actúa como amplificador, debe ser polarizado en la zona activa. Para ello, la juntura base‐emisor debe polarizarse directamente y la juntura base‐colector inversamente. 74
Electrónica Analógica I La figura (B) muestra el comportamiento del transistor en El caso indicado anteriormente. La juntura base‐ emisor actúa como un diodo y presenta comportamiento no lineal. La juntura base‐colector actúa como una fuente de corriente controlada por Ib, la corriente de base. Si el transistor trabaja con pequeña señal, al diodo base emisor podemos reemplazarlo por su resistencia dinámica, tal como se muestra en la figura (C). Esta resistencia se puede hallar fácilmente en la misma forma que la del diodo: re = VT / IEQ Donde: VT = Tensión térmica (25.8 mV a temperatura ambiente). IEQ = Corriente de emisor en el punto de operación. Modelo de parámetros admitancia del transistor. Fórmulas de conversión de los parámetros de las tres configuraciones del transistor. Modelo de parámetros híbridos: Este modelo se usa bastante en baja frecuencia Las variables independientes son: La corriente de entrada y la tensión de salida. Modelo de emisor común: ib
ic
+
vbe
vbe = hie ib + hre vce ic = hfe ib + hoe vce notación matricial: +
vce
vbe
hie
hre
ib
ic
hfe
hoe
vce
75
Electrónica Analógica I El determinante de la matriz cuadrada de parámetros híbridos en emisor común es: Dhe = hie hoe – hfe hre Estas ecuaciones pueden ser representadas por un modelo de circuito que emplea fuentes dependientes, como se muestra a continuación: ib
B
+
vbe
-
ic
+
hie
1 / hoe
hre vce
-
E
Modelo de base común: hfe ib
E
ic
+
veb
C
ie
notación matricial: +
vce
-
+
vcb
veb = hib ie + hrb vcb ic = hfb ie + hob vcb veb
hib
hrb
ie
ic
hfb
hob
vcb
El determinante de la matriz cuadrada de parámetros híbridos en base común es: Dhb = hib hob – hfb hrb La representación con circuito es la siguiente: 76
Electrónica Analógica I ie
E
+
veb
-
ic
+
hib
1 / hob
hrb vcb
-
B
hfb ie
+
vcb
-
C
B
Modelo de colector común: ib
ie
+
vbc
notación matricial: +
vec
-
vbc = hic ib + hrc vec ie = hfc ib + hoc vec vbc
hic
h
hfc
h
ie
hrc
ib
hoc
vec
El determinante de la matriz cuadrada de parámetros híbridos en colector común es: Dhc = hic hoc – hfc hrc La representación con circuito es la siguiente: ib
B
C
+
vbc
-
ie
hic
+
1 / hoc
hrc vec
-
hfc ib
77
+
vec
-
E
C
Electrónica Analógica I Pueden hacerse conversiones de parámetros de una configuración a otra. Como el cuadripolo es lineal, sus parámetros no dependen de las variables y podremos hacer una de las variables cero para calcularlos. Problema 3.1: Halle Los parámetros híbridos en emisor común en función de los de base común. Modelo en base común: ie
E
ic
+
veb
-
+
hib
1 / hob
hrb vcb
-
B
+
vcb
-
hfb ie
B
Lo dibujamos en emisor común: hfb ie
ib
B
vbe
E
ic
C
-
+
+
hrb vcb
+
1 / hob
hib
vce
-
ie
E
Las ecuaciones para emisor común son: vbe = hie ib + hre vce ic = hfe ib + hoe vce Haciendo vce = 0 podemos hallar: hie = vbe / ib y hfe = ic / ib 78
C
Electrónica Analógica I Efectuando: hfb ie
ib
B
C
-
+
vbe
E
ic
+
hrb vcb
+
1 / hob
hib
vce = 0
-
ie
E
En el circuito resultante observamos: vbe = ‐ veb, vcb = ‐ vbe, ib = ‐ ie ‐ ic Además: ‐ vbe = hib ie + hrb vcb = hib(‐ib – ic) – hrb vbe vbe = hib(ib + ic) + hrb vbe (1 – hrb)vbe = hib ib + hib ic ........(1) También: ic = hfb ie + hob veb = hfb (‐ ib – ic) – hob vbe (1 + hfb)ic = ‐ hfb ib – hob vbe ........(2) Reemplazando 2 en 1: (1 – hrb)vbe = hib ib + hib [– (hfb / (1 + hfb)) ib – (hob / (1 + hfb)) vbe [(1 – hrb) – (hibhob / (1 + hfb)] vbe = [hib / (1 + hfb)] ib hib hib hie = ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ = ‐‐‐‐‐‐‐‐‐ 1 + hfb – hrb + Dhb Hb Donde: Hb = 1 + hfb – hrb + Dhb y Dhb = hibhob ‐ hrbhfb A continuación: De 2: vbe = ‐ ((1 + hfb) / hob)ic – (hfb / hob) ib ................(3) Reemplazando 3 en 1: [ ‐ ((1 – hrb)(1 + hfb) / hob]ic ‐ (1 – hrb)hib ic = [hfb / hob + hib] ib 79
Electrónica Analógica I ‐ (hfb + Dhb) hfe = ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ 1 + hfb – hrb + Dhb Haciendo ib = 0 podemos hallar: hre = vbe / vce Efectuando: y hoe = ic / vce 1 / hob
B
ib = 0
ic
C
V3
hrb vcb
+
vbe
hfb ie
+
vce
+
-
hib
E
ie
E
Del circuito obtenemos: ie = ‐ ic vbe = ‐ ie hib – hrb vcb vce = ic / hob – hfb ie/hob + vbe) Luego: vbe = ic hib – hrb (vce – vbe) ........(4) (1 + hfb)ic = hob(vce – vbe) / (1 + hfb)..........(5) Reemplazando 5 en 4: vbe = ‐ hrb vce + hib hob(vce – vbe) ....................................(6) De 6: Dhb – hrb hre = ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ Hb Finalmente, De 4 y 6: 80
vcb = vce – vbe Electrónica Analógica I hob hoe = ‐‐‐‐‐‐‐ Hb PROBLEMA 3.2: En el circuito mostrado determine: a) El valor de hi b) El valor de hf c) El valor de hr d) El valor de ho V1 = hi I1 + hr V2 I2 = hf I1 + ho V2 I1
+
V1
-
I2
100K
10K
gmV1
+
V2
-
100K
gm = 2mS Solución: a) El valor de hi: Modelo para hallar hi y hf: I1
+
V1
-
I2
100K
10K
gmV1
100K
Planteamos ecuaciones: I1 = V1 / 10K + V1 / 100K hi = V1 / I1 = 10K //100K = 9.09KΩ hi = 9.09KΩ 81
Electrónica Analógica I b) El valor de hf: En el circuito anterior: I2 = gmV1 – V1 / 100K = gm (hi I1) ‐ (hi I1) / 100K hf = I2/ I1 = gm (9.09K) ‐ (9.09K) / 100K = 9.09K (2mS) – 0.091 hf = 18.09 c) El valor de hr: Modelo para hallar hr y ho: I1 = 0
+
V1
-
I2
100K
10K
gmV1
100K
+
V2
-
Planteamos ecuaciones: V1 = V2 (10K) / (10K + 100K) hr = V1 / V2 = 10K / (10K + 100K) = 0.091 hr = 0.091 d) El valor de ho: I2 = V2 / 100K + gm V1 + V2 / (100K + 10K) = V2(1 / 100K + 1/110K) + gmhrV2 ho = I2 / V2 = 1 / 100K + 1 / 110K + 0.091(2mS) ho = 0.20mS Valores típicos de los parámetros híbridos: BASE COMUN EMISOR COMUN COLECTOR COMUN hib = 21.6 Ω hie = 1100 Ω hic = 1100 Ω ‐4
‐4
hrb = 2.9x10 hre = 2.5x10 hrc = 1 hfb = ‐ 0.98 hfe = 50 hfc = ‐ 51 ‐6 ‐6 Hob = 0.49x10 S hoe = 25x10 S hoc = 25x10‐6S En la siguiente tabla se muestran las fórmulas de conversión de los parámetros híbridos, de una configuración a otra: 82
Electrónica Analógica I BASE COMUN EMISOR COMUN COLECTOR COMUN hib hib = hie / He hib = hic / Hc hie = hib / Hb hie hie = hic hic = hib / Hb hic = hie hic hrb hrb = (Dhe – hre) / He hrb = (1 + hfc) / Hc hre = (Dhb – hrb) / Hb hre hre = 1 ‐ hrc hrc = (1 + hfb) / Hb hrc = 1 ‐ hre hrc hfb hfb = ‐ (hfe + Dhe) / He hfb = (hrc – 1) / Hc hfe = ‐ (hfb + Dhb) / Hb hfe hfe = ‐ (1 + hfc) hfc = (hrb ‐ 1) / Hb hfc = ‐ (1 + hfe) hfc hob hob = hoe / He hob = hoc / Hc hoe = hob / Hb hoe hoe = hoc hoc = hob / Hb hoc = hoe hoc Dhb = hib hob – hrb hfb Dhe = hie hoe – hre hfe Dhc = hic hoc – hrc hfc Hb = 1 + hfb – hrb +Dhb He = 1 + hfe – hre +Dhe Hc = 1 + hfc – hrc +Dhc La demostración de todas estas ecuaciones es un buen ejercicio para practicar las leyes de Kirchhoff, la ley de Ohm y el funcionamiento de las fuentes dependientes. PARAMETROS K: Este modelo también se usa para representar al transistor. Las variables se definen en forma opuesta que en parámetros híbridos. Es útil cuando la excitación es con fuente de corriente y la salida es una conexión serie. Las variables independientes son: La tensión de entrada y la corriente de salida. Modelo de emisor común: ib = kie vbe + kre ic vce = kfe vbe + koe ic notación matricial: ib
vce
kie
kre
kfe
koe
vbe
ic
El determinante de la matriz cuadrada de parámetros k en emisor común es: 83
Electrónica Analógica I Dke = kie koe – kfe kre Estas ecuaciones pueden ser representadas por un modelo de circuito que emplea fuentes dependientes, como se muestra a continuación: B
ib
+
vbe
-
koe
+
1 / kie
kre ic
ic
C
+
vce
-
kfe vbe
-
E
E
Modelo de base común: notación matricial: ie = kib veb + krb ic vcb = kfb veb + kob ic ie
kib
krb
veb
vcb
kfb
kob
ic
El determinante de la matriz cuadrada de parámetros k en base común es: Dkb = kib kob – kfb krb La representación con circuito es la siguiente: E
ie
+
veb
-
kob
+
1 / kib
krb ic
kfb veb
-
ic
C
+
vcb
B
B
Modelo de colector común: ib = kic vbc + krc ie vec = kfc vbc + koc ie 84
Electrónica Analógica I notación matricial: ib
vec
kic
h
kfc
h
krc
vbc
koc
ie
El determinante de la matriz cuadrada de parámetros k en colector común es: Dkc = kic koc – kfc krc La representación con circuito es la siguiente: B
ib
+
vbc
-
koc
+
1 / kic
krc ie
ie
E
+
vec
-
kfc vbc
-
C
C
Pueden hacerse conversiones de parámetros de una configuración a otra. Como el cuadripolo es lineal, sus parámetros no dependen de las variables y se puede hacer una de las variables independientes cero para calcularlos. PARAMETROS ADMITANCIA: Este modelo también se usa bastante en alta frecuencia. Las variables independientes son: La tensión de entrada y la tensión de salida. Modelo de emisor común: ib = yie vbe + yre vce ic = yfe vbe + yoe vce notación matricial: ib
yie
ic
yfe
yre
yoe
vbe
vce
85
Electrónica Analógica I El determinante de la matriz cuadrada de parámetros admitancia en emisor común es: Dye = yie yoe – yfe yre Estas ecuaciones pueden ser representadas por un modelo de circuito que emplea fuentes dependientes, como se muestra a continuación: ib
ic
C
B
+
vbe
-
yoe
yie
yre vce
yfe vbe
+
vce
-
E
E
Modelo de base común: notación matricial: ib = yib veb + yrb vcb ic = yfb veb + yob vcb ib
yib
yrb
veb
ic
yfb
yob
vcb
El determinante de la matriz cuadrada de parámetros admitancia en base común es: Dyb = yib yob – yfb yrb La representación con circuito es la siguiente: ie
ic
C
E
+
veb
-
yob
yib
yrb vcb
B
yfb veb
+
vcb
B
86
Electrónica Analógica I Modelo de colector común: ib = yic vbc + yrc vec ie = yfc vbc + yoc vec notación matricial: ib
vbc
yic
yrc
h
ie
vec
yfc
yoc
h
El determinante de la matriz cuadrada de parámetros admitancia en colector común es: Dyc = yic yoc – yfc yrc La representación con circuito es la siguiente: ib
ie
E
B
+
vbc
-
yoc
yic
yrc vec
yfc vec
+
vec
-
C
C
Tal como en los parámetros híbridos, pueden hacerse conversiones de parámetros admitancia de una configuración a otra. Podemos hacer una de las variables independientes cero para poder calcular los parámetros. Problema 3.3: Halle los parámetros admitancia en base común en función de los de emisor común. Modelo en emisor común: B
+
ib
Vbe
E
ic
yie
yre Vce
yfe Vbe
yoe
C
+
Vce
E
87
Electrónica Analógica I Lo dibujamos en base común: yoe
E
ic
ie
+
Veb
-
C
yfe Vbe
yie
+
Vcb
-
yre Vce
ib
B
B
Las ecuaciones para base común son: ie = yib Veb + yrb Vcb ic = yfb Veb + yob Vcb Haciendo Vcb = 0 podemos hallar: yib = ie / Veb y yfb = ic / Veb Efectuando: yoe
E
ic
ie
+
Veb
-
B
C
yfe Vbe
yie
yre Vce
+
Vcb = 0
-
ib
B
Vemos que: Vbe = ‐ Veb Vce = ‐ Veb ie + ic + ib = 0 Luego: ib = ‐ yieVeb – yre Veb Además: ic = ‐ yoeVeb – yfeVeb Reemplazando: ie = ‐ ib – ic = yieVeb + yre Veb + yoeVeb + yfeVeb 88
De donde: yib = yie + yre + yoe + yfe De la ecuación de ic: yfb = ‐ (yfe + yoe) Haciendo Veb = 0 podemos hallar: yrb = ie / Vcb y Efectuando: Electrónica Analógica I yob = ic / Vcb yoe
ie
ic
yfe vbe
+
vcb
-
yie
yre vce
ib
Vemos que: Vbe = ‐ Veb = 0 Vce = Vcb yfe vbe = 0 ie + ic + ib = 0 Luego: ie = ‐ yoeVcb – yre Vce Además: ic = ‐ yoeVcb De la ecuación de ie: yrb = ‐ (yre + yoe) De la ecuación de ic: yob = ‐ (yoe + yfe) En la siguiente tabla se muestran las fórmulas de conversión de los parámetros admitancia, de una configuración a otra: 89
Electrónica Analógica I BASE COMUN EMISOR COMUN COLECTOR COMUN yib yib = ∑ye yib = yoc yie = ∑yb yie yie = yic yic = ∑yb yic = yie yic yrb yrb = ‐ (yre + yoe) yrb = ‐ (yfc + yoc) yre = ‐ (yrb + yob) Yre yre = ‐ (yic + yrc) yrc = ‐ (yib + yfb) yrc = ‐ (yie + yre) yrc yfb yfb = ‐ (yfe + yoe) yfb = ‐ (yrc + yoc) yfe = ‐ (yfb + yob) yfe yfe = ‐ (yic + yfc) yfc = ‐ (yib + yrb) yfc = ‐ (yie + yfe) yfc yob yob = yoe yob = ∑yc yoe = yob yoe yoe = ∑yc yoc = yib yoc = ∑ye yoc Dyb = yib yob – yrb yfb Dye = yie yoe – yre yfe Dyc = yic yoc – yrc yfc ∑yb = yib + yrb +yfb + yob ∑ye = yie + yre +yfe + yoe ∑yc = yic + yrc +yfc + yoc Matriz de admitancia indefinida: Para hacer la conversión de parámetros admitancia de una configuración a otra, es conveniente el empleo de la matriz de admitancia indefinida. Esta matriz se define teniendo en cuenta que el transistor no tiene ningún terminal de referencia y que funciona con pequeña señal, como se muestra a continuación: I1
C
B
E
V1
I3
V3
I2
V2
90
Electrónica Analógica I Las ecuaciones de parámetros admitancia se pueden resumir con notación matricial: B
E
C
B
I1
y11
y12
y13
V1
E
I2
y21
y22
y23
V2
C
I3
y31
y32
y33
V3
Como: I1 + I2 + I3 = 0 y vbe + vec + vcb = 0 Se cumple: y11 + y21 + y31 = 0 y12 + y22 + y32 = 0 y13 + y23 + y33 = 0 y11 + y12 + y13 = 0 y21 + y22 + y23 = 0 y31 + y32 + y33 = 0 Conociendo 4 de estas 9 admitancias se pueden hallar las 5 restantes, siempre que no caigan 3 de las 4, en la misma columna o fila. Problema 3.4: Si se tienen los parámetros admitancia en emisor común de un transistor, halle los parámetros admitancia en base común y colector común. yie = (2 + j2)*10‐3 yre = (‐2 ‐ j20)*10‐6 yoe = (20 + j60)*10‐6 yfe = (20 ‐ j3)*10‐3 Solución: Estos parámetros los ubicamos en la matriz de admitancia indefinida, en las ubicaciones que quedan al eliminar la columna y la fila de emisor: 91
Electrónica Analógica I B
E
C
B
I1
yie
y12
yre
V1
E
I2
y21
y22
y23
V2
C
I3
yfe
y32
yoe
V3
Calculamos las otras admitancias de la matriz: y12 = ‐ (yie + yre) = (‐ 1.998 – j 1.98)* 10‐3 y32 = ‐ (yfe + yoe) = (‐20.02 + j 2.94)* 10‐3 y22 = ‐ (y12 + y32) = (22.018 ‐ j 0.96)* 10‐3 y21 = ‐ (yie + yfe) = (‐ 22 + j )* 10‐3 y23 = ‐ (yre + yoe) = (‐ 18 – j 40)* 10‐6 La matriz resultante es: B
E
C
B
(2 + j2)ms
(-1.998 - j1.98)ms
(-2 - j20)us
E
(-22 + j)ms
(22.018 - j0.96)ms
(-18 - j40)us
C
(20 - j3)ms
(-20.02 + j2.94)ms
(20 + j60)us
Para hallar los parámetros admitancia en base común se eliminan la fila y columna de base y los que quedan son los buscados: yib = y22 = (22.018 – j 0.96)* 10‐3 yrb = y23 = (‐ 18 – j 40)* 10‐6 yob = yoe = (20 + j60)*10‐6 yfb = y32 = (‐ 20.02 + j 2.94)* 10‐3 92
Electrónica Analógica I Para hallar los parámetros admitancia en colector común se eliminan la fila y columna de colector y los que quedan son los buscados: yrc = (‐ 1.998 – j 1.98)* 10‐3 yic = yie = (2 + j2)*10‐3 ‐3 yfc = y21 = (‐ 22 + j )* 10
yoc = y22 = (22.018 – j 0.96)* 10‐3 En la siguiente tabla se muestra la ecuaciones de conversión entre parámetros híbridos, admitancia e impedancia: TABLA DE CONVERSIÓN ENTRE MODELOS DE PARÁMETROS Z Y H zi zr zf zo yo / Dy ‐ yr / Dy yf / Dy yi / Dy Dh / ho hr / ho ‐ hf / ho 1 / ho zo / Dz ‐ zr / Dz ‐ zf / Dz zi / Dz yi yr yf yo 1 / hi ‐ hr / hi hf / hi Dh / hi Dz / zo zr / zo ‐ zf / zo 1 / zo 1 / yi ‐ yr / yi yf / yi Dy / yi hi hr hf ho Dzb = zib zob – zrb zfb Dyb = yib yob – yrb yfb Dhb = hib hob – hrb hfb Dzc = zic zoc – zrc zfc Dyc = yic yoc – yrc yfc Dhc = hic hoc – hrc hfc Dze = zie zoe – zre zfe Dye = yie yoe – yre yfe Dhe = hie hoe – hre hfe El empleo de un modelo u otro depende del circuito, su impedancia de entrada (Zi), su impedancia de salida (Zo), la impedancia de salida del generador (RG) y de la impedancia de carga (RL). MODELO DE PARÁMETROS π‐HIBRIDOS: El modelo de parámetros π‐híbridos (o de Giacoletto) es una extensión del modelo T. Se caracteriza porque sus valores permanecen prácticamente constantes con la frecuencia. Es un modelo físico del transistor que incluye los fenómenos capacitivos internos del transistor y se muestra a continuación: 93
Electrónica Analógica I Cμ
rx
B
C
+
Vπ
-
rμ
rπ
Cπ
E
gm Vπ
rc
E
rx = Es la resistencia de dispersión de base. Su valor es pequeño, del orden de las decenas de ohmios. Vπ = Tensión de señal de entrada rπ = Resistencia de entrada = hfe VT / IEQ Cπ = Capacidad de la unión de emisor rμ = Resistencia de realimentación interna Cμ = Capacidad de realimentación interna rc = Resistencia de salida gm = Transconductancia del transistor = α IEQ / VT TECNOLOGÍA DEL TRANSISTOR: El germanio fue descubierto por Winkler en 1886, después que Mendeleiev predijera su existencia y muchas de sus propiedades gracias al sistema periódico de los elementos, en 1869. Mendeleiev le dio el nombre de elka‐silicium debido a su analogía con el silicio. El germanio procede del mineral llamado germanita, en el que se encuentra en una proporción aproximada de 7%. También se le encuentra en los desperdicios procedentes de la extracción de zinc y de las cenizas de la hulla. Los semiconductores a emplear deben tener una gran pureza debido a que una pequeña cantidad de impurezas cambia completamente sus propiedades eléctricas. Además, su estructura cristalina debe ser simétrica (monocristal). Las impurezas pueden incluirse en el semiconductor de diferentes formas: a) Por fundición: Tiene la ventaja de poderse combinar con la extracción del monocristal. Las impurezas se añaden en cantidades precisas. 94
b) c) d) Electrónica Analógica I Por aleación: Consiste en poner una gota de impureza a cada lado de un disco fino de semiconductor y luego calentarlo para que los átomos de impureza penetren en el semiconductor, cambiándolo a tipo P o N Por difusión: El semiconductor se coloca en un recipiente donde la sustancia que actuará de impureza se halla en estado gaseoso y a alta temperatura. Los átomos de impureza se difunden en el semiconductor formando una delgada capa de material tipo P o N. Estos métodos se aplican tanto al germanio como al silicio, con la diferencia que este último es mucho más activo y puede ser atacado por el material del crisol, generándose impurezas en forma incontrolable; por ello, requiere el uso de crisoles especiales. Epitaxial: Se origina el crecimiento del material semiconductor en estado de cristal sobre otro material semiconductor también en estado cristalino. FORMAS DE CONSTRUCCIÓN DEL TRANSISTOR: Transistor de puntas de contacto: Constan de una plaquita de material base tipo N o P sobre la que están aplicadas dos puntas metálicas. El material del colector y del emisor se obtiene al soldar las puntas con el material base mediante un impulso de corriente, haciendo que se introduzcan impurezas de tipo opuesto a la de la base. Este método fue uno de los primeros en realizarse y actualmente está en desuso. Transistor de unión: Son formados por capas superpuestas de material semiconductor. Se aplican dos bolitas de impurezas a ambos lados para formar el colector y el emisor. La penetración de las impurezas se regula en forma precisa Debido al grueso de la unión, las capacidades inter.‐electródicas resultan relativamente elevadas por lo que limita su empleo a frecuencias menores de 20 MHz. Transistor planar: Se construye mediante una plaqueta de silicio tipo N o P que constituirá el colector. Uno de sus lados se reviste con una capa de óxido de silicio. A continuación se hace una ventana por donde se difunden impurezas para formar la base. Se vuelve a cubrir con una capa de óxido de silicio y se practica otra ventana sobre la base para difundir el emisor. Se vuelve a cubrir todo con una capa de óxido de silicio y se practican otras ventanas para poner los terminales de base, colector y emisor. Con esta técnica pueden construirse los dos tipos de transistores y pueden soportar tensiones del orden de 100 V y corrientes del orden de 10 A. 95
Electrónica Analógica I Transistor homotaxial o de difusión única: Se fabrica a partir de una placa de material tipo P y, al contrario del planar, no se forma capa de oxido. La impureza penetra, durante el proceso de difusión, por ambos lados de la placa formando el colector y el emisor. El material tipo P constituye la base. Estos transistores son muy robustos y adecuados para trabajar con altas corrientes, por los que se les usa mucho en etapas de potencia de baja frecuencia. Debido al espesor de la base, su frecuencia de transición no es muy elevada (1 MHz) y admiten tensiones del orden de 100 V. Sólo se fabrican de tipo NPN. Transistor mesa: Es fabricado con el proceso epitaxial. Se hace crecer una delgada capa de silicio poco dopado (que constituirá la base) sobre un sustrato de silicio fuertemente dopado (que constituirá el colector). La base se cubre con una capa de óxido de silicio y luego se practica una ventana donde se difunde el emisor. Debido a que el proceso de formación de la base es muy lento, puede controlarse su espesor con mucha exactitud, por lo que se pueden lograr espesores muy reducidos, permitiendo su empleo en frecuencias altas. Pueden trabajar con corrientes altas y tensiones del orden de 200 V. Se fabrican en versiones PNP y NPN. Transistor mesa semiplanar: La unión base‐colector se obtiene mediante tecnología mesa y la unión base‐emisor mediante tecnología planar. Se parte de una plaquita de silicio no oxidado que se expone a un proceso de difusión (parecido al método homotaxial, con la diferencia que el material intermedio no constituye la base sino el colector); a continuación se recubre toda la placa con óxido de silicio y se elimina toda la capa difundida inferior. A continuación se difunde en la capa superior el emisor mediante la técnica planar. Estos transistores son menos robustos que los mesa, pero poseen una frecuencia de transición muy elevada y pueden manejar tensiones muy altas, del orden de 1500 V. Sólo se fabrican en versión NPN. Nomenclatura de los transistores para baja frecuencia: Nomenclatura americana: Los transistores, sea cual sea su aplicación, se designan con el prefijo 2N (dos uniones) seguido por un número dado por el fabricante. Nomenclatura europea antigua: Se utilizaban 2 ó 3 letras seguidas de un número. La primera letra es una O, que indica que es un semiconductor. La segunda letra es una A para los transistores. Nomenclatura europea moderna: Esta nomenclatura es más acertada que las anteriores debido a que se puede identificar el tipo de semiconductor y deducir 96
Electrónica Analógica I parte de sus características. La nomenclatura está compuesta de dos letras seguidas de un número de serie compuesto de tres cifras, para los dispositivos semiconductores diseñados para emplearse en aparatos domésticos, o una letra y dos cifras, si son para uso industrial. La primera letra puede ser: A para los dispositivos de germanio B para los dispositivos de silicio La segunda letra puede ser: C para los transistores de baja frecuencia y baja potencia D para los transistores de baja frecuencia y potencia 97
Electrónica Analógica I UNIDAD TEMÁTICA No. 4 EL TRANSISTOR UNIPOLAR (FET) Son transistores que funcionan controlando la corriente que circula por el cuerpo del semiconductor, mediante un campo eléctrico distribuido en toda su extensión. La magnitud del campo eléctrico es determinada por el voltaje externo de control aplicado al dispositivo. La corriente que conducen es fundamentalmente de un solo tipo de carga, por lo que se les conoce como dispositivos unipolares PRINCIPIO DE FUNCIONAMIENTO La diferencia entre un transistor bipolar (BJT) y un transistor unipolar (FET) es el modo de actuación sobre el terminal de control. En el transistor bipolar se debe inyectar una corriente de base para regular la corriente de colector, mientras que en el FET el control se hace mediante la aplicación de una tensión entre compuerta y fuente. Esta diferencia viene determinada por la estructura interna de ambos dispositivos, que son sustancialmente distintas. Es una característica común, sin embargo, el hecho de que la potencia que consume el terminal de control (base o compuerta) es siempre más pequeña que la potencia manejada en los otros dos terminales. En resumen, destacamos tres cosas fundamentales: • En un transistor bipolar IB controla la magnitud de la corriente IC. • En un FET, la tensión VGS controla la magnitud de la corriente ID. • En ambos casos, con una potencia pequeña puede controlarse otra bastante mayor. TIPOS DE FET Por su forma de construcción, existen: • FET de juntura (JFET): Pueden ser canal N ó P • FET metal‐oxido‐semiconductor (MOSFET): Pueden ser canal N ó P 99
Electrónica Analógica I Estos a su vez se dividen en: MOSFET de acumulación (o enriquecimiento o incremental) MOSFET de reducción (o de estrangulamiento) • FET metal‐semiconductor (MESFET): Pueden ser canal N ó P MOSFET Es un transistor de efecto de campo de metal‐óxido‐semiconductor. El control de la corriente lo realiza mediante el campo eléctrico. Poseen impedancia de entrada muy elevada y su construcción es superficial. MOSFET DE ACUMULACIÓN: Es el tipo más sencillo de todos y, en la actualidad, el más usado. A continuación se muestra su esquema de construcción (para un MOSFET canal N): W = Ancho del canal L = Longitud del canal tox = Espesor de la capa de óxido D = Drenador (o Drain o sumidero) S = Fuente (o Source o surtidor) G = Compuerta (o Gate) B = Sustrato (o Bulk) G
S
D
W
tox
N+
N+
L
P
x
B
100
Electrónica Analógica I En los dispositivos discretos, la fuente (S) está comúnmente unida con el sustrato (B). Cuando no hay esta unión, el voltaje entre fuente y sustrato (VSB) también afecta al funcionamiento del dispositivo. La capa de óxido (cuyo espesor se indica con tox) está hecha de óxido de silicio (SiO2) posee una permitividad eléctrica indicada con εox y la carga eléctrica que contiene, indicada con Qox, influye mucho en las características del dispositivo. Qox es en realidad una densidad de carga superficial formada por iones de impurezas, átomos de silicio ionizados, ambos dentro de la capa de óxido y también por cargas en los bordes de la unión del óxido con el semiconductor debido a la finalización de la estructura cristalina del silicio. Estas cargas no se mueven y están muy cerca de la superficie del semiconductor. Qox no depende del tipo de sustrato, pero sí de su orientación cristalográfica. Cuando el óxido es formado por medios térmicos, Qox es formada por carga positiva. El MOSFET presenta tres tipos de condición eléctrica en las regiones cercanas a la superficie de unión con la capa de óxido: ACUMULACIÓN: Si en el esquema mostrado aplicamos una tensión negativa entre la compuerta y sustrato (VGS), se atraerán más cargas positivas a las regiones cercanas a la superficie de unión con la capa de óxido. Por ello, la densidad de carga superficial aumentará en esta zona en una cantidad que podemos indicar con QA. DEPLEXIÓN: Si en el esquema mostrado aplicamos una tensión positiva, relativamente pequeña, esta tensión rechazará las cargas positivas móviles de las regiones cercanas a la superficie de unión con la capa de óxido. Por ello, la densidad de carga superficial disminuirá en una cantidad que podemos indicar con NAS, que es formada por iones negativos, generándose en esta región una zona de deplexión (o transición). Al igual que en el diodo, se puede hacer la aproximación de que en esta región, de espesor xd, no hay carga libre y sólo hay iones inmóviles cuya densidad superficial se puede expresar como: NAS = NA xd NA es la concentración de átomos aceptadores en el sustrato Si, mediante la aproximación indicada, consideramos que está distribuida de manera uniforme en la zona de deplexión, entonces, el campo eléctrico en esta región podemos expresarlo por: Eo = e NAS / εox = e NA xd / εox 101
Electrónica Analógica I INVERSIÓN: Si en el esquema mostrado hacemos que la tensión positiva respecto al sustrato sea más alta, aparecerá también una densidad superficial de electrones libres, ns, que formará un canal de unión entre las regiones n+ del drenador y la fuente. Para ello se necesitará que la tensión VGS alcance un valor umbral (VTH). El campo eléctrico producido a través del óxido será ahora: Eo = e (NAS + ns)/ εox Despejando ns: ns = (εox Eo / e) ‐ NAS ECUACIONES DEL MOSFET Para ello consideraremos tres casos: 1.‐ Cuando el voltaje drenador‐fuente (VDS) es pequeño comparado con (VGS ‐ VTH). En este caso, las cargas libres estarán distribuidas uniformemente en todo el canal y podemos hablar de una densidad de corriente lineal a lo largo del canal, dada por la expresión: Js = ID / W En esta región, la corriente de drenador tiene la siguiente ecuación: ID = 2K1 [VGS – VTH] VDS Se definen: Tensión umbral: VTH = e NAS tox /εox = e NAS/Cox K = (W/L)(εox/tox)(μn/2) Bajo estas condiciones, se dice que el MOSFET actúa en la región óhmica y se le puede usar como resistencia controlada por voltaje. La resistencia del canal es dada por: Rds = VDS/ID = 1/[2K(VGS – VTH)] 2.‐ Cuando el voltaje drenador‐fuente (VDS) no es despreciable respecto a (VGS ‐ VTH) En este caso, el campo eléctrico a lo largo del canal ya no es uniforme y el potencial VDS ya no es lineal a lo largo del canal. Esto obligará a que el campo eléctrico en el óxido tampoco sea uniforme y varíe con la distancia. En este caso la corriente de drenador es dada por la ecuación: 102
Electrónica Analógica I ID = 2K [(VGS ‐ VTH)VDS – VDS2/2] 3.‐ Esta ecuación es válida para valores de: VDS < (VGS ‐ VTH) Observamos que ya no hay dependencia lineal con VDS A esta región se le sigue llamando zona óhmica, aunque también recibe el nombre de región triodo. Cuando el voltaje drenador‐fuente (VDS) es mayor que (VGS ‐ VTH) En este caso aparece en el canal una zona de agotamiento, de longitud δ, que reduce el largo del canal, y hace que ID se haga independiente de VDS Este comportamiento se cumple a partir de: VDS = VGS ‐ VTH Reemplazando esta ecuación en la anterior de ID, llegamos a: ID = [W/(L ‐ δ)](μn/2)(εox/tox)](VGS ‐ VTH)2 Aquí vemos que ID se hace independiente de VDS En las geometrías usadas para el MOSFET, generalmente se cumple que: δ << L, por lo que se puede hacer la siguiente aproximación: ID = K (VGS ‐ VT)2 = IDSS (1 ‐ VGS /VTH)2 A la región que empieza cuando se cumple VDS = VGS ‐ VTH se le conoce como zona de saturación o de corriente constante. Esta región equivale a la zona activa del transistor bipolar Símbolos de los Mosfet de acumulación: En las figuras son mostrados los modelos de los Mosfet de acumulación canal N y canal P. También se indican las polaridades de los voltajes y los sentidos de circulación de corriente. 103
Electrónica Analógica I ID
ID
+
VDS
ID
VDS
+
ID
+
VGS
-
VGS
+
CANAL N
CANAL P
PROBLEMA 4.1.‐ Un MOSFET puede ser usado como resistencia variable con la tensión para valores pequeños de VDS. Suponga: VT = 1V, tox = 500Ǻ, εox = 3.5x10‐13 F/cm, μn = 1500 cm2/Vs. ¿Qué valor de W/L dará un transistor NMOS cuya resistencia de canal cambia de 1 KΩ á 200Ω para: 3V ≤ VGS ≤ 11V. Solución: En la zona óhmica se cumple: Rds = VDS/ID = 1/[2K(VGS – VTH)] K = (W/L)(εox/tox)(μn/2) Para: Rds = 1 KΩ = 1/[(W/L)(3. 5x10‐13/500x10‐8)(1500)(3 – 1)] Despejando: W/L = 100/21 = 4.762 Verificando para Rds = 200 Ω 200Ω = 1/[(W/L)(3. 5x10‐13/500x10‐8)(1500)(11 – 1)] Despejando: W/L = 100/21 = 4.762 Con lo cual se verifica que la relación W/L hallada satisface las condiciones dadas Curvas características del Mosfet de acumulación. Las curvas más importantes que describen en funcionamiento del FET son las de transferencia y las de salida. 104
Electrónica Analógica I Curva de transferencia: Esta curva describe la dependencia de la corriente de salida (ID) con la tensión de entrada (VGS). En las figuras siguientes se observa para los transistores de canal N y P respectivamente. - ID
ID
VTH
VGS
- VTH
- VGS
CANAL N
CANAL P
Observamos que para que haya corriente, la magnitud del voltaje de entrada(VGS) debe superar la de la tensión umbral (VTH). En caso contrario, no habrá corriente de salida. Como la ecuación es cuadrática, habrán dos resultados para ID. Esta curva también es útil para saber cuál de las dos soluciones es la correcta. Curvas de salida: Estas curvas forman una familia, una para cada valor de VGS y relacionan la corriente de salida (ID) y versus la tensión de salida (VDS). Son útiles para ver las zonas de operación del dispositivo y definir los conceptos de punto de operación y rectas de carga estática y dinámica. La siguiente figura muestra estas gráficas para canal N. Para canal P son similares, solo que las polaridades y los sentidos de la corriente se invierten. 105
Electrónica Analógica I ID
VDS = VGS - VTH
VGS4
OHMICA
VGS3
SATURACION O
CORRIENTE CONSTANTE
VGS2
VGS1
CORTE
VDS
MOSFET DE REDUCCIÓN: Este Mosfet tiene una construcción parecida a la del de acumulación, con la diferencia que el canal ya ha sido hecho durante el proceso de fabricación. A continuación se muestra su esquema de construcción (para un MOSFET canal N): G
D
S
W
tox
N
N+
N+
L
P
B
x
0
x
106
Electrónica Analógica I W = Ancho del canal L = Longitud del canal tox = Espesor de la capa de óxido D = Drenador (o Drain o sumidero) S = Fuente (o Source o surtidor) G = Compuerta (o Gate) B = Sustrato (o Bulk) En los dispositivos discretos, la fuente (S) está comúnmente unida con el sustrato (B). Cuando no hay esta unión, el voltaje entre fuente y sustrato (VSB) también afecta al funcionamiento del dispositivo. La capa de óxido (cuyo espesor se indica con tox) está hecha de óxido de silicio (SiO2) posee una permitividad eléctrica indicada con εox El control de la corriente entre drenador y fuente se hace ahora haciendo reducir el canal ya existente. Para ello, se aplica una tensión entre compuerta y fuente que induzca cargas de signo opuesto a las que abundan en el canal. Estas, al recombinarse con las inducidas, hacen disminuir las cargas netas libres y en consecuencia, también a la corriente. Las ecuaciones del MOSFET de reducción son las mismas que las del JFET, que se estudia más adelante. Símbolos de los Mosfet de reducción: En las figuras son mostrados los modelos de los Mosfet de reducción canal N y canal P. También se indican las polaridades de los voltajes y los sentidos de circulación de corriente. 107
Electrónica Analógica I ID
+
VDS
ID
VGS
+
+
VGS
-
ID
VDS
+
ID
CANAL P
CANAL N
Curvas características del Mosfet de reducción. Las curvas más importantes que describen en funcionamiento del FET son las de transferencia y las de salida. Curva de transferencia: Esta curva describe la dependencia de la corriente de salida (ID) con la tensión de entrada (VGS). En las figuras siguientes se observa para los transistores de canal N y P respectivamente. ID
-ID
IDSS
IDSS
VP
VGS
VP
VGS
CANAL N
CANAL P
Observamos que para que haya corriente, la magnitud del voltaje de entrada(VGS) debe ser menor que la tensión de contracción (VP). En caso contrario, no habrá corriente de salida. 108
Electrónica Analógica I Como la ecuación es cuadrática, habrán dos resultados para ID. Esta curva también es útil para saber cuál de las dos soluciones es la correcta. IDSS es la corriente de drenador cuando VGS = 0 VP es la tensión VGS que hace cerrar el canal y, por tanto, la corriente de drenador se hace cero. Estos dos parámetros los da el fabricante en la hoja técnica del dispositivo. Curvas de salida: Estas curvas forman una familia, una para cada valor de VGS y relacionan la corriente de salida (ID) y versus la tensión de salida (VDS). Son útiles para ver las zonas de operación del dispositivo y definir los conceptos de punto de operación y rectas de carga estática y dinámica. La siguiente figura muestra estas gráficas para canal N. Para canal P son similares, solo que las polaridades y los sentidos de la corriente se invierten. ID
VDS = VGS - VP
VGS4
OHMICA
VGS3
SATURACION O
CORRIENTE CONSTANTE
VGS2
VGS1
CORTE
VDS
JFET Este tipo de FET se construye mediante un material semiconductor tipo P ó N y a sus lados se forman uniones con material opuesto y de mucho mayor dopaje que en el cuerpo. En el siguiente gráfico se muestra un JFET con canal N. 109
Electrónica Analógica I Vemos que el cuerpo es tipo N y a los costados hay 2 regiones tipo P con dopaje mucho mayor que en el tipo N. Esto se hace para que las regiones de transición sean mayores en el material tipo N El principio de funcionamiento se basa en hacer aumentar o disminuir las regiones de transición para controlar el flujo de corriente entre drenador y fuente (ID). Las regiones de transición (indicadas con líneas punteadas) se controlan mediante la tensión VGS.; para ello, es necesario que polarizar inversamente las uniones P‐N. P+
S
a
D
Id
b
+
VGS
G
P+
- VDS +
Vemos que el cuerpo es tipo N y a los costados hay 2 regiones tipo P con dopaje mucho mayor que en el tipo N. Esto se hace para que las regiones de transición sean mayores en el material tipo N ECUACIONES DEL JFET Al igual que en el MOSFET de acumulación, se considerarán los casos 1.‐ Cuando el voltaje drenador fuente (VDS) es pequeño comparado con VGS: Como VDS es pequeño, podemos aproximar y decir que la región de transición tendrá una distribución constante a lo largo del canal. Con el siguiente esquema mostramos este caso: P+
S
a
b
+
VGS
G
P+
- VDS +
110
D
Id
Electrónica Analógica I En este caso, las cargas libres estarán distribuidas uniformemente en todo el canal y podremos decir: Jn = e n μn EDS No consideramos la difusión porque la distribución es uniforme, ni la densidad de huecos por ser portadores minoritarios. EDS es el campo eléctrico entre drenador y fuente. Si se cumple en el material tipo n: ND >> 2ni, entonces se puede aproximar: n = ND Si el ancho del FET es A, entonces la sección transversal del cuerpo es 2bA y podemos hallar la expresión de la corriente de drenador: ID = 2 b A e ND μn EDS Como VDS es pequeño, podemos hacer la siguiente aproximación: EDS = VDS/L Donde: L = longitud del canal. Entonces: ID = 2 b A e ND μn VDS/L En la unión P‐N abrupta, el potencial en la juntura es dado por: Vo – VGS = [e ND NA /(2ε(NA +ND)]W2 Como NA >> ND, Despejando W: entonces: Vo – VGS = [e ND / 2ε]W2 1/2
W = [2ε / eND] (Vo – VGS )1/2 Del gráfico vemos también que el ancho de la región de transición (W) se W = a ‐ b puede expresar como: Reemplazando y despejando Vo – VGS: Vo – VGS = [e a2 A ND / 2ε](1 – b/a)2 Entonces: Si se cumple: VGS >> Vo, 2 VGS = ‐ [e a A ND / 2ε](1 – b/a)2 Cuando VGS se hace tan negativo que el canal se cierra: b = 0 111
Electrónica Analógica I En este caso, la máxima tensión VGS que cierra el canal es: Vp = ‐ [e a2 A ND / 2ε] Este voltaje recibe el nombre de tensión de contracción (o de Pinch Off) y es un parámetro dado por el fabricante en los manuales técnicos. Este voltaje es negativo para los JFET de canal N y positivo para los de canal P. A continuación: VGS = Vp(1 – b/a)2 Despejando b: b = a[1 ‐ (VGS / Vp)1/2] Reemplazando en la ecuación de ID: ID = [2 A a e ND μn /L] [1 ‐ (VGS / Vp)1/2] VDS Vemos que hay una relación lineal entre ID y VDS. Luego, podemos hallar la resistencia del canal para tensiones VDS pequeñas: RDS = VDS / ID = 1 / [2 A a e ND μn /L] [1 ‐ (VGS / Vp)1/2] Definimos: ron = 1 / [2 A a e ND μn /L] Esta resistencia es la mínima que ofrece el canal cuando VGS = 0 Entonces: RDS = ron / [1 ‐ (VGS / Vp)1/2] Esta es una resistencia cuyo valor puede ser controlado con la tensión VGS (también llamada VDR). Esta característica es útil para controlar la ganancia de los amplificadores. 2.‐ Cuando el voltaje drenador fuente (VDS) es mayor que (VGS – Vp): Cuando: VDS = VGS – Vp se tiene: ID = Kp VDS2 La ecuación: VDS = VGS – Vp corresponde a la región umbral entre la zona óhmica y de saturación. Para valores VDS > VGS – Vp, el JFET llega a la zona de saturación y se hace prácticamente independiente de VDS. Entonces: ID = Kp [(VGS – Vp)2 112
Factorizando Vp: Electrónica Analógica I ID = IDSS [(1 ‐ VGS / Vp)2 Que es la ecuación típica del JFET en la región de saturación. Símbolos de los Jfet: En las figuras son mostrados los modelos de los jfet canal N y canal P. También se indican las polaridades de los voltajes y los sentidos de circulación de corriente. ID
+
VDS
ID
VGS
+
+
VGS
-
ID
VDS
+
ID
CANAL N
CANAL P
Curvas características del jfet: Las curvas más importantes que describen en funcionamiento del FET son las de transferencia y las de salida. Son análogas a las del Mosfet de reducción. Curva de transferencia: Esta curva describe la dependencia de la corriente de salida (ID) con la tensión de entrada (VGS). En las figuras siguientes se observa para los transistores de canal N y P respectivamente. ID
-ID
IDSS
IDSS
VP
VGS
VP
VGS
CANAL N
CANAL P
113
Electrónica Analógica I Observamos que para que haya corriente, la magnitud del voltaje de entrada(VGS) debe ser menor que la tensión de contracción (VP). En caso contrario, no habrá corriente de salida. Como la ecuación es cuadrática, habrán dos resultados para ID. Esta curva también es útil para saber cuál de las dos soluciones es la correcta. IDSS es la corriente de drenador cuando VGS = 0 VP es la tensión VGS que hace cerrar el canal y, por tanto, la corriente de drenador se hace cero. Estos dos parámetros los da el fabricante en la hoja técnica del dispositivo. Curvas de salida: Estas curvas forman una familia, una para cada valor de VGS y relacionan la corriente de salida (ID) y versus la tensión de salida (VDS). Son útiles para ver las zonas de operación del dispositivo y definir los conceptos de punto de operación y rectas de carga estática y dinámica. La siguiente figura muestra estas gráficas para canal N. Para canal P son similares, solo que las polaridades y los sentidos de la corriente se invierten. ID
VDS = VGS - VP
VGS4
OHMICA
VGS3
SATURACION O
CORRIENTE CONSTANTE
VGS2
VGS1
CORTE
VDS
Regiones de operación del transistor: En las curvas de salida se observan las regiones comunes de operación: Zona óhmica: En esta zona el transistor actúa como interruptor cerrado. Aquí también, en las zonas cercanas al origen (VDS pequeña) el dispositivo se comporta 114
Electrónica Analógica I como resistencia lineal controlada por la tensión VGS. Esta zona es muy útil para hacer controles automáticos de ganancia e interruptores analógicos pues acepta voltajes VDS de las dos polaridades. Zona de corte: En esta región el dispositivo actúa como interruptor abierto. Junto con la zona óhmica permiten hacer circuitos digitales y también ser usado como interruptor para circuitos de potencia. Zona de saturación o de corriente constante: Esta región permite amplificar al dispositivo y se le emplea para amplificar señales analógicas. Aquí ID es prácticamente independiente de VDS. Polarización: Para que el FET amplifique es necesario ubicar su punto de operación en la zona de corriente constate. Para ello, necesitamos establecer una tensión y corriente constante que lo ubiquen dicha zona. A continuación son mostradas las formas típicas de polarizar al FET: 115
Electrónica Analógica I JFET: VDD
VDD
RD
VDD
RD
RD
RF
R1
- VDD
- VDD
RD
- VDD
RD
RG
RD
RF
R1
RG
RS
R2
RG
RS
RS
CANAL N
R2
RG
RS
CANAL N
RS
CANAL N
CANAL P
CANAL P
- VDD
- VDD
RS
CANAL P
MOSFET DE REDUCCIÓN: VDD
VDD
RD
VDD
RD
RF
R1
RD
RD
RD
RF
R1
RG
RD
RG
RS
RS
R2
CANAL N
- VDD
RS
CANAL N
RG
R2
RG
RS
CANAL N
RS
CANAL P
116
CANAL P
RS
CANAL P
Electrónica Analógica I MOSFET DEACUMULACIÓN: VDD
VDD
RD
R1
R2
- VDD
RD
RD
RF
RS
CANAL N
- VDD
RG
RD
R1
RS
RF
R2
CANAL N
RS
RG
CANAL P
CANAL P
Rectas de carga: Recta de carga DC. Recta de carga AC. Para el estudio de los circuitos utilizamos las leyes de Kirchhoff y la ley de Ohm. En el siguiente circuito usado como amplificador: VDD
RD
R1
C2
C1
+
vg
-
RL
R2
RS
CS
117
RS
Electrónica Analógica I La corriente de drenador está formada por la corriente del punto de operación y la corriente de señal: ID = IDQ + id En forma análoga para la tensión: VDS = VDSQ + vds Planteando la ley de Kirchhoff en la malla drenador‐fuente: VDD + 0 = IDQ RD + VDSQ + IDQ RS + id (RD//RL) + vds Aquí se han considerado muy pequeñas las reactancias de los condensadores a la frecuencia de la señal. Los 3 primeros términos de la derecha son DC y se cumple: VDD = IDQ (RD + RS) + VDSQ Y recibe el nombre de Recta de carga estática (o DC) Los 2 términos siguientes de la derecha son AC y se cumple: 0 = + id (RD//RL) + vds Y recibe el nombre de Recta de carga dinámica (o AC) Lo anterior indica que podemos estudiar al amplificador sólo en DC y luego sólo en AC, en forma análoga al BJT. Estas ecuaciones pueden ser graficadas en las curvas de salida del transistor y son un par de rectas. PROBLEMA 4.2.‐ Halle los valores de RD, RS, R1, R2 y R3 para polarizar un MOSFET de acumulación con VTH = 1V, en el punto de operación: VDSQ = 15V, IDQ = 4.5mA, VGSQ = 2V. Además: Zi =10MΩ. Asuma que: Rs = (VGSQ + VTH ) / IDQ Para minimizar las variaciones por temperatura. 118
Electrónica Analógica I 0.1 mA
+ 24 V
RD
R1
R3
C1
+
vg
-
R2
RS
CS
Solución: Recta DC: 24 = ID(RD + RS) + VDS Reemplazando valores: 24 = (4.5)(RD + RS) + 15 Obtenemos: (RD + RS) = 2KΩ En la red de polarización de compuerta: 24 = (0.1mA)(R1 + R2) Obtenemos: (R1 + R2) = 240KΩ Hallamos RS: Rs = (VGSQ + VTH ) / IDQ Reemplazando valores: Rs = (2 + 1)V / 4.5mA = 667Ω Rs = 667Ω Obtenemos RD: RD = 2KΩ ‐ RS = 1.33KΩ RD = 1.33KΩ El voltaje en R2 es: VR2 = VGSQ + IDQ Rs Reemplazando valores: VR2 = 2 + (4.5mA)(667Ω) = 5V Obtenemos R2. R2 = 5V / 0.1mA = 50KΩ R2 = 50KΩ 119
Electrónica Analógica I Obtenemos R1. R1 = 240KΩ – 50KΩ = 190KΩ R1 = 190KΩ La impedancia de entrada para señal que ofrece el amplificador es: Zi = R3 + R1//R2 = 1MΩ Despejando R3: R3 = 1MΩ ‐ R1//R2 = 1MΩ – 39.58KΩ = 960.42KΩ R3 = 960.42KΩ Configuraciones de los FET: Cuando trabaja con señales pequeñas, el Fet puede ser considerado como un cuadripolo. Como el dispositivo tiene sólo 3 terminales, deberá considerarse uno común a la entrada y salida, como se muestra a continuación para el Jfet. Fuente común: Esta configuración usa el terminal de fuente común a la entrada y salida. Se caracteriza por amplificar tensión y corriente. La señal de salida está desfasada 180° respecto a la entrada. El siguiente esquema muestra esta configuración: id
D
ig = 0
+
vds
-
G
+
vgs
S
S
FUENTE COMUN
Drenador común: Esta configuración usa el terminal de drenador común a la entrada y salida. Se caracteriza por amplificar corriente. La señal de salida está en fase con respecto a la entrada. 120
Electrónica Analógica I El siguiente esquema muestra esta configuración: is
S
ig = 0
+
vsd
-
G
+
vgd
D
D
DRENADOR COMUN
Compuerta común. Esta configuración usa el terminal de compuerta común a la entrada y salida. Se caracteriza por amplificar tensión. La señal de salida está en fase con respecto a la entrada. El siguiente esquema muestra esta configuración: Is
id
S
+
vsg
-
D
+
vdg
-
G
G
COMPUERTA COMUN
Modelos de baja frecuencia y pequeña señal del FET: El FET presenta efectos capacitivos internos, los cuales deben ser considerados cuando trabaja con frecuencias altas. Cuando las frecuencias son bajas estas capacidades tienen reactancias muy elevadas y se les puede considerar circuitos abiertos. 121
Electrónica Analógica I Hay dos modelos típicos que se usan para todos los FET: El modelo Norton y el modelo Thevenin. El uso de cada uno de ellos dependerá del tipo de circuito usado. Se emplea el que facilite más el análisis. Ambos modelos se emplean para cualquier configuración y cualquier tipo de FET. Modelo tipo Norton para pequeña señal y alta frecuencia: Un modelo muy empleado para pequeña señal en todos los FETs es el siguiente, expresando el circuito de salida por un equivalente Norton: Cgd
G
D
+
Vgs
-
gm Vgs
Cgs
rds
Cds
S
S
Cgs, Cgd y Cds se emplean sólo cuando se trabaja con frecuencias altas Cgs es la capacidad de entrada, entre compuerta y fuente Cgd es la capacidad de realimentación, entre drenador y fuente Cds es la capacidad de salida, entre drenador y fuente gm = transconductancia del FET para pequeña señal. rds = Resistencia del canal para pequeña señal. Modelo tipo Norton para baja frecuencia: En este caso, no se consideran las capacidades y la entrada del FET es un circuito abierto. Aquí: El FET se comporta como fuente de corriente controlada por tensión. ig = 0
id
G
D
+
vgs
-
rds
gm vgs
S
122
+
vds
S
Electrónica Analógica I Modelo tipo Thevenin para pequeña señal y alta frecuencia: Otro modelo muy empleado para pequeña señal en todos los FETs es el expresando con su circuito de salida por un equivalente Thevenin: Cgd
ig
rds
id
G
D
+
vgs
-
u vgs
+
Cgs
S
Cds
+
vds
S
Modelo tipo Thevenin para pequeña señal y baja frecuencia: En este caso, no se consideran las capacidades y la entrada del fet es un circuito abierto. Aquí: μ = Factor de amplificación del fet para pequeña señal = gm rds rds = Resistencia del canal para pequeña señal. ig = 0
rds
G
id
D
+
vgs
-
u vgs
+
S
+
vds
S
PROBLEMA 4.3.‐ En el siguiente circuito con MOSFET, halle la ganancia de tensión, la impedancia de entrada y la impedancia de salida. Datos: gm = 2mS , rds = 15KΩ 123
Electrónica Analógica I 100K
C
Zo
+
Vo
-
Zi
5K
RL
C
+
+
10K
Vi
-
-
VDD
C es muy grande
Solución: Hacemos el modelo para pequeña señal y baja frecuencia: 100K
ig
+
vi
-
5K
gm vgs
+
vgs
-
15K
Ganancia de tensión: Av = Vo / Vi Usándole método de nodos: (Vgs – Vi) / 5K = (Vgs – Vo) / 100K Nudo Vgs: (Vi ‐ Vgs) / 5K = (Vgs – Vo) / 100K Despejando Vgs: Vgs(1/5K + 1/100K) = Vi / 5K + Vo / 100K Vgs = (20/21)Vi + Vo/21 Nudo Vo: (Vo ‐ Vi) / 105K + Vo / 10K + Vo / 15K + gm Vgs = 0 124
RL = 10K
+
vo
Electrónica Analógica I Ordenando: Vo(1/105K + 1/10K + 1/15K) – Vi / 105K + gmVgs = 0 Reemplazando Vgs: Vo(1/21 + 1/2 + 1/3 + 10/21) = Vi[1/21 – 200/21] Despejando Av: Vo(1/21 + 1/2 + 1/3 + 10/21) = Vi[1/21 – 200/21] Av = (1/21 ‐ 200/21) / [ 1/21 + 1/2 + 1/3 + 10/21] = ‐ 1.905 / 1.357 Efectuando: Av = ‐ 9.476 / 1.357 = ‐ 6.976 Av = ‐ 6.976 Impedancia de entrada (sin incluir los 5KΩ): Zi = Vgs / Ig Sabemos que: Ig = (Vgs – Vo)/100K Además: Vgs = (20/21)Vi + Vo/21 = Vi(20/21 + Av/21) = ‐ 0.15Vi Dividiendo por Ig: Zi = 0.62(5K + Zi) Despejando Zi: Zi = 0.62(5K)/(1 – 0.62) = 8.16KΩ Zi = 8.16KΩ 125
Electrónica Analógica I UNIDAD TEMÁTICA No. 5 GANANCIAS DEL AMPLIFICADOR: Tipos de amplificadores Antes de iniciar el análisis de circuitos, indicaremos los tipos y características de los amplificadores. a) Amplificador de Tensión: Es un amplificador que recibe tensión y entrega tensión. Su impedancia de entrada debe ser elevada y su impedancia de salida pequeña. Su circuito de salida es mejor representado por un equivalente de Thevenin. La salida es una fuente de tensión controlada por tensión. Rg
+
Vg
-
Zo << RL
+
Vi
-
Zi
+
Zo
Av Vi
-
RL
+
VL
-
Zi >> Rg
b) Av = VL / Vi = Ganancia de tensión. Zi = Impedancia de entrada. Zo = Impedancia de salida. Un amplificador de este tipo es mejor representado por parámetros z debido a que éstos reciben tensión y entregan tensión. Amplificador de Corriente: Es un amplificador que recibe corriente y entrega corriente. Su impedancia de entrada debe ser pequeña y su impedancia de salida elevada. Su circuito de salida es mejor representado por un equivalente de Norton. La salida es una fuente de corriente controlada por corriente. 127
Electrónica Analógica I Ii
Zo >> RL
IL
Ai Ii
Ig
Rg
Zi
Zo
RL
Zi << Rg
Ai = IL / Ii = Ganancia de corriente. Zi = Impedancia de entrada. Zo = Impedancia de salida. Un amplificador de este tipo es mejor representado por parámetros h debido a que éstos reciben corriente y entregan corriente. c) Amplificador de Transconductancia (o transadmitancia): Es un amplificador que recibe tensión y entrega corriente. Su impedancia de entrada debe ser elevada y su impedancia de salida también elevada. Su circuito de salida es mejor representado por un equivalente de Norton. La salida es una fuente de corriente controlada por tensión. Rg
Zo >> RL
IL
+
Vg
-
+
Vi
-
Gm Vi
Zi
Zo
RL
Zi >> Rg
128
Electrónica Analógica I Gm = IL / Vi = Transconductancia o transadmitancia. Zi = Impedancia de entrada. Zo = Impedancia de salida. Un amplificador de este tipo es mejor representado por parámetros y debido a que éstos reciben tensión y entregan corriente. d) Amplificador de Transresistencia (o transimpedancia): Es un amplificador que recibe corriente y entrega tensión. Su impedancia de entrada debe ser pequeña y su impedancia de salida también pequeña. Su circuito de salida es mejor representado por un equivalente de Thevenin. La salida es una fuente de tensión controlada por corriente. Ii
Zo << RL
+
Ig
Rg
Zi
Zo
Rm Ii
-
RL
+
VL
-
Zi << Rg
Rm = VL / Ii = Transrresistencia o transimpedancia. Zi = Impedancia de entrada. Zo = Impedancia de salida. Un amplificador de este tipo es mejor representado por parámetros k debido a que éstos reciben corriente y entregan tensión. El tipo de amplificador se identifica comparando las impedancias de entrada con la del generador y la impedancia de salida con la de carga. De esta manera podemos identificar el modelo de parámetros más conveniente para el análisis. 129
Electrónica Analógica I Impedancia de entrada, Zi: Es la impedancia que ofrece el amplificador en su entrada. Es importante conocerla para poder acoplar la señal de entrada e impedir que disminuya la amplificación. Del gráfico vemos que se puede hallar como: Zi = Vg / Ig Ig
+
Vg
RL
Impedancia de salida, Zo: Es la impedancia que ofrece el amplificador, en su salida, a la carga. Es importante conocerla para poder acoplar la carga al amplificador e impedir que disminuya la amplificación. La salida se puede modelar como un circuito Thevenin o un circuito Norton, como se muestra en el gráfico: Zo
Ig
+
Vg
-
Zi
+
Av Vg
-
Una forma de hallar Zo es, viendo el gráfico: 1) Hacer Vg = 0 2) Sacar la carga y, en su lugar, poner una fuente V 3) Se obtiene: Zo = V / I 130
RL
+
VL
-
Electrónica Analógica I I
Ig = 0
+
Zo
V
Zi
-
Otra forma de hallar Zo es, viendo el gráfico: 1) Sacar la carga y medir la tensión de salida en vacío: VL1 = Av Vg. Ig
Zo
Zi
+
Vg
-
2) +
Av Vg
-
+
VL1 = Av Vg
-
Poner la carga y medir nuevamente el voltaje de salida: Ig
IL
Zo
+
Vg
-
Zi
+
Av Vg
-
RL
+
VL2 = IL RL
-
131
Electrónica Analógica I 3) Se obtiene: Zo = (VL1 – VL2) / IL= (VL1 / VL2 – 1)RL Análisis de un amplificador usando parámetros híbridos: Haremos el análisis, mediante un problema, representando al transistor con su modelo: Problema 5.1: En el siguiente esquema simplificado de un amplificador de pequeña señal, con parámetros híbridos, halle las expresiones de: a) La ganancia de tensión (Av) b) La impedancia de entrada (Zi) c) La impedancia de salida (Zo) Rg
hi
+
+
Vg
i
+
RL
hr VL
hf i
-
1 / ho
VL
-
-
Solución: a) Obtención de la ganancia de tensión: Av = VL / Vg Del circuito de entrada: Vg – hr VL i = ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ Rg + hi Del circuito de salida: VL = ‐ hf i (RL // (1 / ho)) Reemplazando: Vg – hr VL VL = ‐ hf (‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐)(RL // (1 / ho)) Rg + hi Simplificando: VL ‐ hf RL Av = ‐‐‐‐‐‐‐ = ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ Vg Rg(1 + ho RL) + hi + RL(Dh) Donde: Dh = hi ho – hf hr 132
b) c) Electrónica Analógica I Obtención de la impedancia de entrada: Zi = Vg / i Del circuito de entrada: Vg – hr VL i = ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ Rg + hi Luego: i (Rg + hi ) = Vg – hr VL Reemplazando VL: i (Rg + hi ) = Vg – hr (‐ hf i (RL // (1 / ho)) Finalmente: Vg hi + Rg(1 + ho RL) + RL Dh Zi = ‐‐‐‐‐‐ = Rg + hi – hr hf (RL // (1 / ho) = ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ I 1 + ho RL hi + Rg(1 + ho RL) + RL Dh Zi = ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ 1 + ho RL Obtención de la impedancia de salida: Zo = V / I cuando Vg = 0 Esquema para hallar Zo: Rg
hi
I
+
i
+
hr V
hf i
1 / ho
V
-
-
Tenemos: I = ho V + hf i Además, en la entrada: ‐ hr V i = ‐‐‐‐‐‐‐‐‐‐‐‐‐‐ Rg + hi Reemplazando i: ‐ hr V I = ho V + hf (‐‐‐‐‐‐‐‐‐‐) Rg + hi 133
Electrónica Analógica I 1 hrhf hoRg + Dh Yo = ‐‐‐‐‐‐ = ho ‐ ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ = ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ Zo hi + Rg hi + Rg hi + Rg Zo = ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ hoRg + Dh Estas expresiones son válidas para cualquier configuración del transistor. Configuraciones de transistores: Hay ocasiones en las que es necesario hacer combinaciones de transistores para modificar la ganancia, la capacidad de corriente, de tensión, etc. A continuación se muestran las más comunes: Darlington: En la siguiente figura es mostrada la forma de conexión. Q1
Q1
Q2
Q2
Q3
DARLINGTON
CON 2 TRANSISTORES
DARLINGTON CON
TRES TRANSISTORES
Puede observarse que los colectores están unidos y el emisor de uno va a la base del siguiente. Características: 1) La ganancia del transistor equivalente es muy elevada. 2) La resistencia de entrada equivalente es más elevada. 3) La corriente de entrada es reducida (ofrece menor carga). 4) Mayor inestabilidad térmica, por lo que debe tenerse cuidado de estabilizarlo. Esta empeora cuando consta de más de dos transistores. 134
Q1
R1
Electrónica Analógica I R3
Q2
R2
Darlington con modificaciones
para mejorar la estabilidad térmica.
PNP simulado: En la siguiente figura es mostrada la forma de conexión. IE
IB
Q1
PNP
Q2
NPN
IC
Observamos que hay dos corrientes que salen y una que ingresa, lo que es típico del transistor PNP. Características: 1) La ganancia del transistor equivalente es muy elevada. 2) La resistencia equivalente de entrada es alta. 3) La corriente de entrada es reducida (ofrece menor carga). 4) Mayor inestabilidad térmica, por lo que debe tenerse cuidado de estabilizarlo. 5) Muy usado en amplificadores de potencia de audio porque evita el empleo de transistores PNP de alta potencia en la etapa de salida. NPN simulado. En la siguiente figura es mostrada la forma de conexión. 135
Electrónica Analógica I IC
Q2
PNP
IB
Q1
NPN
IE
Observamos que hay dos corrientes que ingresan y una que sale, lo que es típico del transistor NPN. Características: 1) La ganancia del transistor equivalente es muy elevada. 2) La resistencia de entrada equivalente es alta. 3) La corriente de entrada es reducida (ofrece menor carga). 4) Mayor inestabilidad térmica, por lo que debe tenerse cuidado de estabilizarlo. Transistores en paralelo. En la siguiente figura es mostrada la forma de conexión. Q1
Q2
Q1
PARALELO CON
2 TRANSISTORES
Q2
Q3
PARALELO CON
3 TRANSISTORES
Características: 1) La ganancia del transistor equivalente es igual a la de un solo transistor. 2) La resistencia de entrada equivalente es baja. 3) La corriente total de salida es elevada (ofrece menor carga). 4) La corriente total de entrada es más alta (ofrece mayor carga). 5) Mayor inestabilidad térmica, por lo que debe tenerse cuidado de estabilizarlo. 6) Debe asegurarse que se repartan la corriente equitativamente. 7) Respuesta en frecuencia menor que la de un solo transistor. 136
R1
Electrónica Analógica I Q1
R1
Q2
R2
R2
Modificaciones para igualar las
corrientes y las resistencias de entrada.
Transistores en serie. En la siguiente figura es mostrada la forma de conexión. Q1
Q2
Características: 1) Muy usada para construir el amplificador cascode. 2) La ganancia de corriente del transistor equivalente es igual a la de un solo transistor. 3) La resistencia de entrada equivalente es relativamente baja. 4) La corriente total de salida es la misma que de un solo transistor. 5) Se reparten el voltaje de la fuente. 6) Debe tenerse cuidado con la red de polarización. 7) Debe asegurarse que se repartan la tensión equitativamente. 8) Mejor respuesta en frecuencia. Formas de acoplo de los amplificadores: Debido a que las impedancias de entrada y salida de los amplificadores transistorizados en montaje de emisor común, que es el más utilizado, son del orden de 1 KΩ á 20 KΩ, respectivamente, el acoplamiento directo de dos etapas 137
Electrónica Analógica I amplificadoras produce pérdidas considerables de potencia. Para evitarlo, debemos adaptar las impedancias. Para adaptar las impedancias de entrada y salida de dos etapas amplificadoras se utilizan diversos tipos de acoplamiento: Acoplo por transformador: Se muestra en el siguiente esquema. Es el que ofrece mayor ganancia de potencia, pero no es muy utilizado porque su respuesta en frecuencia no es muy amplia. C1
1
Q1
TR
5
Q2
C2
4
8
R1
R2
VCC
Acoplo por transformador Si la impedancia de salida de Q1 es 20 KΩ y la de entrada de Q2 es de 1 KΩ, la relación de transformación (n) deberá ser: n = (20000/1000)0.5 = 4.47 Acoplo por autotransformador: Emplea un autotransformador en lugar de transformador. A continuación se muestran dos formas de uso de este método: T
C1
R3
Q1
C3
Q2
R1
R2
R4
C2
C4
VCC
138
Electrónica Analógica I T
C1
Q1
C3
Q2
R1
R2
C2
R3
R4
C4
VCC
Acoplo por autotransformador Acoplo por resistencia‐capacidad (R‐C): Este es uno de los más usados y, aunque no permite acoplar perfectamente las impedancias y la ganancia es menor, su precio y espacio ocupado es más reducido. Permite también una buena respuesta en frecuencia si C1 es lo suficientemente elevado. C1
Q2
Q1
R1
R2
VCC
Acoplo por resistencia capacidad (R‐C) Acoplo directo: Este es también muy usado, especialmente en circuitos integrados. Debe tenerse cuidado con la estabilidad de los puntos de operación debido a que influyen de una etapa a otra. Permite una buena respuesta en baja frecuencia (desde DC). VCC
R1
R4
Q1
Q2
R2
R3
R5
C1
139
Electrónica Analógica I VCC
R1
R2
R6
R5
Q1
Q2
R4
R7
C1
R3
Acoplo directo Acoplo directo complementario: Esta es otra forma de acoplo muy difundida que permite muy buena respuesta en baja frecuencia (desde DC) y se caracteriza por emplear transistores NPN y PNP. Cuando se emplea acoplo directo con un solo tipo de transistor, la tensión continua de salida tiende a acercarse al valor de la fuente de alimentación, restringiendo el nivel máximo de amplificación. Este problema se evita empleando los dos tipos de transistor para que la tensión DC en la salida no se eleve demasiado, como se muestra a continuación: VCC
R1
R2
R6
R5
Q2
Q1
R4
R7
C1
R3
Acoplo directo complementario 140
Electrónica Analógica I Controles de volumen y de tono El control de volumen, como su nombre lo indica, consiste en un potenciómetro que regula el volumen sonoro proporcionado por el amplificador desde cero hasta su máxima potencia. Debe ser colocado en una posición tal que no afecte las corrientes de polarización ni las impedancias de carga de los transistores. Tampoco deben ser causa de ruido, lo cual puede suceder cuando es colocado a la entrada, porque el ruido será amplificado y se deteriorará la relación señal / ruido. Si se le coloca en una etapa intermedia puede ser que no ajuste la salida a un nivel suficientemente bajo. Por ello, su ubicación deberá elegirse con cuidado para evitar estos efectos desfavorables. Estos controles son hechos mediante potenciómetros logarítmicos debido a las características de funcionamiento del oído humano. Configuraciones de amplificadores con transistores y/o FET. Veremos aquí la forma de análisis de las configuraciones de amplificadores con BJT y FET. Amplificador en emisor común: Esta configuración se caracteriza por amplificar tensión y corriente. En frecuencias medias el desfasaje en la salida respecto a la entrada es 180°. En el siguiente esquema se observa esta configuración: VCC
R1
RC
C2
+
C1
1kHz
+
RL
R2
+
Vg
RE
CE
R1, R2, RC y RE fijan el punto de operación en la zona activa directa. 141
Electrónica Analógica I C1 y C2 son condensadores de acoplo. Evitan que varíe el punto de operación al conectar la señal de entrada y la carga, respectivamente. Además, sus reactancias deben ser pequeñas de manera que puedan considerarse como cortocircuitos en las frecuencias de operación. CE es la capacidad de bypass o desacoplo de emisor. Su misión es conectar, para señal, el emisor a la referencia para evitar que disminuya la amplificación. Problema 5.2: En el circuito mostrado con BJT, calcule: a) El punto de operación del transistor. b) La ganancia de corriente para pequeña señal. (Ai = Io / Ig) c) La impedancia de entrada, (Zi = Vi / Ii). d) La impedancia de salida, (Zo = V / I cuando Vi = 0) + 25 V
100K
7K
150K
C3
Zo
Zi
C2
C1
Ii
Q
5K
+
Vi
-
1K
C4
Transistor: Silicio, VBE = 0.6V, β = 100, hie = 1KΩ, hfe = 150, hre = 0, hoe = 0 Solución: a) Punto de operación del transistor: 142
+
Vo
-
Electrónica Analógica I 25 V
7K
250K
Q
1K
b) Recta DC: 25 = 8K IE + VCE = 8K IC + VCE β >> 1 Además: VCE = 250K IEB + VBE = 2.5K IC + 0.6 Resolviendo: ICQ = 2.32 mA VCEQ = 6.4 V Ganancia de corriente para pequeña señal: Modelo para señal: Usamos el modelo simplificado en emisor común. ib
1K
Io
Ii
Vi
100K
150 ib
150K
7K
Del circuito de entrada: ib = Ii (100K) / (100K + 1K) Del circuito de salida: Io = ‐ 150 ib (150K // 7K) / [5K + (150K // 7K)] Reemplazando y efectuando: AI = ‐ 85.04 143
5K
Electrónica Analógica I c) Impedancia de entrada, (Zi = Vi / Ii). Del circuito de entrada obtenemos: Zi = 100K // 1K Zi = 0.99KΩ d) La impedancia de salida, (Zo = V / I cuando Vi = 0) Del circuito de salida obtenemos: Zo = 150K // 7K Zo = 6.7 KΩ Amplificador en colector común (o seguidor de emisor): Esta configuración se caracteriza por amplificar corriente, pero no tensión. En frecuencias medias el desfasaje en la salida respecto a la entrada es 0°. En el siguiente esquema se observa esta configuración: VCC
R1
C1
Vg
1kHz
+
+
R2
RE
CE
RL
R1, R2, RC y RE fijan el punto de operación en la zona activa directa. C1 y CE son condensadores de acoplo. Evitan que varíe el punto de operación al conectar la señal de entrada y la carga, respectivamente. Además, sus reactancias deben ser pequeñas de manera que puedan considerarse como cortocircuitos en las frecuencias de operación. En el esquema no hay resistencia en el colector, aunque hay casos en que también existe. 144
Electrónica Analógica I Problema 5.3: En el circuito mostrado, halle: a) La ganancia de tensión, AV = VL / Vi b) La ganancia de corriente, AI c) La impedancia de entrada, Zi d) La impedancia de salida, Zo 91K
Zi
C
100K
2N2222 ó
2N3904
B
+
Vg
10uF
+
Vin
-
+
Zo
12V
E
15K
100uF
1K
-
+
VL
-
RL
100
-
Solución: a) La ganancia de tensión, AV = VL / Vi Modelo para señal: 100K
+
Vi
-
12.88K
1K 100
+
Vg
-
+
VL
-
120 ib
ib
100K
3.5K
+
Vi
-
12.88K
1K
100
+
VL
-
De los datos de la hoja técnica del 2N3904 tenemos: hfe = 120, hoe = 9uS, hre = 1.3x10‐4, hie = 3.5KΩ Despreciamos los parámetros hre y hoe por ser pequeños. Aplicando reflexión de impedancias y sustitución: 145
Electrónica Analógica I ib
3.5K
+
Vi
-
12.88K
(121)1K (121)100
b) +
VL
-
Luego: VL = 121(1K // 100)Vi / [3.5K + 121(1K // 100)] = 0.76Vi De donde: AV = 0.76 La ganancia de corriente, AI = iL / ig ig
121 ib
ib
3.5K
+
Vi
-
12.88K
1K
c) d) iL
100
+
VL
-
Del gráfico: iL = 121ib (1K) / (1K + 0.1K) = 110 ib Además: ib = ig (12.88K) / [12.88K + 3.5K + 121(1K // 0.1K)] Reemplazando en la ecuación anterior y efectuando: iL = 47.04 ig De donde: La impedancia de entrada, Del gráfico vemos: Efectuando: AI = 47.04 Zi = Vi / ig Zi = 12.88K // [3.5K + 121(1K // 0.1K)] Zi = 6.82KΩ La impedancia de salida, Zo Circuito equivalente para hallar Zo: 146
Electrónica Analógica I 120 ib
ib
3.5K
I
12.88K
100K
+
V
-
1K
Aplicando el método de nodos: ‐ I ‐ ib ‐ 120 ib + V / 1K = 0 Además: ib = ‐ V / [100K // 12.88K + 3.5K] Reemplazando: I = 121V[1 / 1K + 1 / 14.91K] De donde: Zo = 7.75Ω Problema 5.4: En el circuito mostrado, halle: a) La ganancia de tensión, AV b) La ganancia de corriente, AI c) La impedancia de entrada, Zi d) La impedancia de salida, Zo + 15V
12K
Ig
+
Vg
C
220K
IL
C
2K
2K
+
VL
-
147
Electrónica Analógica I Transistor: Silicio, VBE = 0.6V, β = 100, hie = 1KΩ, hfe = 150, hre = 0, hoe = 0 Asuma que todos los condensadores son muy grandes. Solución: a) La ganancia de tensión, AV: Modelo para señal Ig
150 ib
ib
1K
+
12K
Vg
220K
IL
2K
2K
+
VL
-
Aplicando voltaje de nudos en el emisor: VL / 2K + VL / 2K + (VL + Vg) / (12K // 220K) + ib = ib + hfe ib = 151 ib Además: ib = Vg / 1K Reemplazando: VL [1 / 2K + 1 / 2K + 1 / 11.38K] = Vg [150 / 1K – 1 / 11.38K] De esta ecuación hallamos la ganancia de tensión: Av = 137.8 b) Ganancia de corriente, AI AI = AV ZI / RL = 137.8(Zi) / 2K Ig = ib + (VL + Vg) / (12K // 220K) = Vg / 1K + Vg (Av + 1) / (12K // 220K) Zi = Vg / Ig = 0.076K AI = 5.22 148
Electrónica Analógica I c) La impedancia de entrada, Zi Ig = ib + (VL + Vg) / (12K // 220K) = Vg / 1K + Vg (Av + 1) / (12K // 220K) Zi = Vg / Ig = 0.076K Zi = 76Ω d) La impedancia de salida, Zo Modelo para hallar Zo. 150 ib
ib
1K
12K
220K
I
+
V
2K
-
Vemos que: Ib = 0 hfe ib = 0 Luego: Zo = 2K // 12K // 220K = 1.70K Zo = 1.70K Amplificador en base común: Esta configuración se caracteriza por amplificar tensión, pero no corriente. En frecuencias medias el desfasaje en la salida respecto a la entrada es 0°. En el siguiente esquema se observa esta configuración: 149
Electrónica Analógica I VCC
R1
RC
C2
+
CE
RL
Vg
+
+
C1
R2
RE
1kHz
R1, R2, RC y RE fijan el punto de operación en la zona activa directa. CE y C2 son condensadores de acoplo. Evitan que varíe el punto de operación al conectar la señal de entrada y la carga, respectivamente. Además, sus reactancias deben ser pequeñas de manera que puedan considerarse como cortocircuitos en las frecuencias de operación. C1 es la capacidad de bypass o desacoplo de base. Su misión es conectar, para señal, la base a la referencia para evitar que disminuya la amplificación. Problema 5.5: En el circuito mostrado con BJT, calcule: a) La ganancia de tensión para pequeña señal. (AV = VL / Vi) b) La ganancia de corriente para pequeña señal. (AI = IL / Ig) c) La impedancia de entrada, (Zi = Vi / Ii). d) La impedancia de salida, (Zo = V / I cuando Vg = 0) 2N2222 ó
2N3904
1K
E
C
100uF
+
Vg
1K
5.6K
+
Vin
-
B
RL
10K
15K
-
10uF
91K
10uF
+
VL
-
12V
-
+
150
Electrónica Analógica I Solución: a) Ganancia de tensión, AV = VL / Vi Modelo para señal: ig
+
Vg
-
ig
1K
ie
1K
+
Vi
-
1K
10K
5.6K
+
Vg
-
+
VL
-
hfb ib
1K
10K
hib
5.6K
+
VL
-
De los datos de la hoja técnica del 2N3904 tenemos: hfe = 120, hoe = 9uS, hre = 1.3x10‐4, hie = 3.5KΩ De la tabla de conversión de parámetros: hib = hie / He, hrb = (Dhe – hre) / He, hfb = ‐ (hfe + Dhe) / He, hob = hoe / He Donde: He = 1 + hfe – hre +Dhe Efectuando: y Dhe = hie hoe – hre hfe Dhe = 31.5x10‐3 – 15.6x10‐3 = 15.9x10‐3 He = 1 + 120 – 1.3x10‐4 + 15.9x10‐3 = 121 Luego: hib = hie / He = 29Ω hrb = (Dhe – hre) / He = 1.58x10‐4 hfb = ‐ (hfe + Dhe) / He = ‐ 0.99 hob = hoe / He = 0.074uS Despreciamos los parámetros hrb y hob por ser pequeños. Entonces: VL = ‐hfb(5.6K // 10K) ie = 3.55K ie Además: ie = Vi / (hib) = Vi / 29 Reemplazando: VL = 3.55K(Vi / 29) = 122.4 Vi AV = 122.4 De donde: b) Ganancia de corriente para pequeña señal. (Ai = IL / Ig) Del gráfico: iL = ‐hfb ie (5.6K) / (5.6K + 10K) = 0.355 ie Además: ie = ig (1K) / (1K + hib) = 0.97 ig Reemplazando: iL = (0.355)(0.97 ig) = 0.345 ig De donde: AI = 0.345 151
Electrónica Analógica I c) Impedancia de entrada, (Zi = Vi / Ig). Del gráfico: Zi = 1K // hib = 28.2Ω Zi = 28.2Ω d) Impedancia de salida, (Zo = V / I cuando Vi = 0) ig
I
ie
1K
1K
hfb ib
hib
5.6K
hfb ie = 0 Zo = 5.6KΩ +
V
-
Del gráfico: ie = 0 Luego: Características de las configuraciones del BJT: Configuración Desfasaje Av Ai Zi Zo Base Común 0° Alta Cerca á 1 Baja Alta Emisor Común 180° Alta Alta Mediana Alta Colector 0° Cerca á 1 Alta Alta Baja Común Empleo del FET como resistor controlado por voltaje. Esta es una aplicación del Fet que permite su uso en controles automáticos de ganancia y en interruptores analógicos. PROBLEMA 5.6.‐ Un MOSFET puede ser usado como resistencia variable con la tensión para valores pequeños de VDS. Suponga: VT = 1V, tox = 500Ǻ, εox = 3.5x10‐13 F/cm, µn = 1500 cm2/Vs. ¿Qué valor de W/L dará un transistor NMOS cuya resistencia de canal cambia de 1 KΩ á 200Ω para: 3V≤VGS≤11V. Solución: En la zona óhmica se cumple: 152
Electrónica Analógica I Rds = VDS/ID = 1/[2K(VGS – VTH)] K = (W/L)(εox/tox)(µn/2) Para: Rds = 1 KΩ = 1/[(W/L)(3. 5x10‐13/500x10‐8)(1500)(3 – 1)] Despejando: W/L = 100/21 = 4.762 Verificando para Rds = 200 Ω 200Ω = 1/[(W/L)(3. 5x10‐13/500x10‐8)(1500)(11 – 1)] Despejando: W/L = 100/21 = 4.762 Con lo cual se verifica que la relación W/L hallada satisface las condiciones dadas Amplificador en fuente común: Esta configuración se caracteriza por amplificar tensión y corriente. En frecuencias medias el desfasaje en la salida respecto a la entrada es 180°. En el siguiente esquema se observa esta configuración: VDD
RD
iL
ig
C
+
Vg
C
RL
Rg
-
Rs
+
VL
-
C
153
Electrónica Analógica I Problema 5.7: En el circuito mostrado con FET, calcule: a) La ganancia de tensión para pequeña señal. (AV = VL / Vg) b) La ganancia de corriente para pequeña señal. (Ai = IL / Ig) c) La impedancia de entrada, (Zi = Vg / Ig). d) La impedancia de salida, (Zo = V / I cuando Vi = 0) 24 V
8K
iL
ig
C
C
10K
+
Vg
500K
1K
+
VL
-
C
-
Transistor: Silicio, gm = 5mS, rds = 10KΩ Solución: a) Ganancia de tensión para pequeña señal. (AV = VL / Vg) Modelo para señal: Usamos el modelo Norton. iL
ig
ig
+
Vg
500K
-
8K 10K
+
VL
-
iL
+
Vg
500K
-
+
Vgs
-
gm Vgs
10K
Del circuito de entrada: Vgs = Vg Del circuito de salida: VL = ‐ gm Vgs (10K // 8K// 10K) Reemplazando y efectuando: AV = ‐ 15.38 b) La ganancia de corriente para pequeña señal. (Ai = IL / Ig) Del circuito de entrada: Vgs = 500K ig Del circuito de salida: iL = ‐ gm Vgs (10K // 8K) / (8K // 10K + 10K) Reemplazando y efectuando: AI = ‐ 769.2 154
8K 10K
+
VL
-
c) d) Electrónica Analógica I Impedancia de entrada, (Zi = Vg / Ig). Del circuito de entrada obtenemos: Zi = 500KΩ La impedancia de salida, (Zo = V / I cuando Vg = 0) Del circuito de salida obtenemos: Zo = 4.44 KΩ Amplificador en drenador común (o seguidor de fuente): Esta configuración se caracteriza por amplificar corriente, pero no tensión. En frecuencias medias el desfasaje en la salida respecto a la entrada es 0°. En el siguiente esquema se observa esta configuración: VDD
ig
iL
C
+
Vg
Rg
Rs
C
RL
-
+
VL
-
Problema 5.8: En el circuito mostrado con FET, calcule: a) La ganancia de tensión para pequeña señal. (AV = VL / Vg) b) La ganancia de corriente para pequeña señal. (Ai = IL / Ig) c) La impedancia de entrada, (Zi = Vg / Ig). d) La impedancia de salida, (Zo = V / I cuando Vi = 0) 24 V
ig
iL
C
+
Vg
500K
2K
-
C
2K
+
VL
-
155
Electrónica Analógica I Transistor: Silicio, µ = 50, rds = 10KΩ Solución: Ganancia de tensión para pequeña señal. (AV = VL / Vg) a) Modelo para señal: Usamos el modelo Thevenin. ig
10K
ig
G
+
+
500K
2K
2K
-
S
Vg
+
VL
-
iL
+
Vgs
-
iL
Vg
-
+
50 Vgs
500K
2K
-
2K
+
VL
-
Del circuito de entrada: Vgs = Vg – Vs VL = Vs Del circuito de salida: VL = 50 Vgs (2K // 2K) / (2K // 2K + 10K) = 4.545 Vgs Reemplazando y efectuando: VL = 4.545 (Vg – VL) AV = 0.82 b) Ganancia de corriente para pequeña señal. (Ai = IL / Ig) Del circuito de entrada: Ig = Vg / 500K iL = VL / 2K Dividiendo: (Ai = IL / Ig) = (VL / 2K) / (Vg / 500K) = AV(500K / 2K) Luego: Ai = (0.82)(500K / 2K) = 204.92 Ai = 204.92 c) Impedancia de entrada, (Zi = Vg / Ig). Zi = 500KΩ Del circuito de entrada obtenemos: d) Impedancia de salida, (Zo = V / I cuando Vg = 0) -
+
50 Vgs
10K
ig
G
+
Vgs
-
I
S
+
500K
2K
V
-
156
Electrónica Analógica I Del circuito de entrada obtenemos: Vgs = ‐ V Del circuito de salida obtenemos: I = V / 2K + (V + 50V) / 10K Despejando y efectuando: Zo = 178.6Ω Amplificador en compuerta común: Esta configuración se caracteriza por amplificar tensión, pero no corriente. En frecuencias medias el desfasaje en la salida respecto a la entrada es 0°. En el siguiente esquema se observa esta configuración: VDD
RD
C2
IL
+
Ce
Ig
RL
VL
+
C1
RG
RS
-
Vg
-
Problema 5.9: En el circuito mostrado con FET, calcule: a) La ganancia de tensión para pequeña señal. (AV = VL / Vg) b) La ganancia de corriente para pequeña señal. (Ai = IL / Ig) c) La impedancia de entrada, (Zi = Vg / Ig). d) La impedancia de salida, (Zo = V / I cuando Vi = 0) 24 V
8K
iL
C
C
500K
C
ig
10K
+
2K
+
VL
-
Vg
-
Transistor: Silicio, µ = 50, rds = 10KΩ Solución: 157
Electrónica Analógica I a) Ganancia de tensión para pequeña señal. (AV = VL / Vg) Modelo para señal: Usamos el modelo Thevenin. iL
50 Vgs
S
ig
10K
+
500K
iL
-
+
ig
2K
Vg
+
VL
-
+
Vg
-
8K
2K
Vgs
+
10K
10K
8K
+
VL
-
G
-
Del circuito de entrada: Vgs = ‐Vg Del circuito de salida: VL = ‐ (Vgs + 50Vgs) (8K//10K) / (10K + 8K//10K) Reemplazando y efectuando: VL = (51Vg) (8K//10K) / (10K + 8K//10K) = 15.7Vg AV = 15.7 b) Ganancia de corriente para pequeña señal. (Ai = IL / Ig) Del circuito de entrada: Vgs = ‐Vg Ig = Vg / 2K – 51Vgs / (10K + 8K//10K) Reemplazando Vgs: Ig = Vg / 2K + 51Vg / 14.44K = Vg / 248.1 Del circuito de salida obtenemos: iL = (51Vg / 14.44K)(8K) / (10K + 8K) = (22.67)Vg / 14.44K Reemplazando Vg: iL = (22.67)( 0.2481K ) ig / 14.44K De donde: AI = 0.39 c) Impedancia de entrada, (Zi = Vg / Ig). Del circuito de entrada: Ig = Vg / 2K – 51Vgs / (10K + 8K//10K) Vgs = ‐Vg Reemplazando: Ig = Vg / 2K + 51Vg / 14.44K = Vg / 4.03K Luego: Zi = 4.03KΩ 158
Electrónica Analógica I d) Impedancia de salida, (Zo = V / I cuando Vg = 0) I
-
+
50 Vgs
S
2K
Vgs
+
10K
+
V
8K
G
-
Del circuito de entrada obtenemos: Vgs = 0 y 50Vgs = 0 Del circuito de salida obtenemos: Zo = 8K // 10K Efectuando: Zo = 4.44KΩ Características de las configuraciones del FET: Configuración Desfasaje Av Ai Zi Zo Compuerta 0° Alta Menor que 1
Baja Alta Común Fuente Común 180° Alta Alta Alta Alta Drenador Común 0° Menor que 1 Alta Alta Baja Amplificadores en cascada. Cuando la amplificación de una sola etapa no es suficiente, se pueden conectar dos o más etapas, una después de la otra. A esta disposición se le conoce como Amplificadores en cascada. La forma de acolo puede ser cualquiera de las que ya hemos visto. En la figura siguiente se muestra un caso con etapas con acoplo R‐C: 159
Electrónica Analógica I VDD
RD
Ce
Ig
R3
R1
C2
Q1
R7
R5
C5
C3
Q3
Q2
RL
+
RS
Vg
-
RG
R8
R2
R4
+
VL
-
C4
C1
R6
R9
C6
Problema 5.10: En el siguiente amplificador en cascada, halle: a) Av b) AI c) AP d) Zi e) Zo + 9V
2.2K
1.3K
IL
Ig
C2
C1
Q2
Q1
+
200
1.8K
Vg
-
600
Q1 y Q2: hfe1 = hfe2 = 100, hie1 = 1KΩ, Los condensadores son muy grandes. Solución: 160
2K
+
VL
-
C3
hie2 = 2KΩ, hre = 0, hoe = 0 Electrónica Analógica I a) Av = VL / Vg Modelo en AC: IL
Ig
Q2
Q1
200
+
Vg
-
600
1.3K
2.2K
1.8K
2K
+
VL
-
Reemplazando los transistores por su modelo de cuadripolo: ib2
Ig
IL
ib1
+
Vg
-
200
600
2.2K
1.8K
1K
100 ib1
2K
100 ib2
1.3K
2K
+
VL
-
Del circuito de salida: VL = ‐ 100 i b2 (1.3K // 2K) Del circuito central: ib2 = ‐ 100 i b1 (2.2K / (2.2K + 2K)) Del circuito de entrada: i b1 = Ig (0.6K // 1.8K) / (0.6K // 1.8K + 1K)) Ig = Vg / (0.2K + 0.6K // 1.8K // 1K) Finalmente obtenemos: Av = (VL / ib2)(ib2 / i b1)(i b1 / Ig)(Ig / Vg) Reemplazando: Av = [‐ 78.79K][‐ 52.38][0.273)][1 / 0.51K] = 2209.17 Av = 2209.17 b) AI = IL / Ig Del circuito de entrada: i b1 = Ig (0.6K // 1.8K) / (0.6K // 1.8K + 1K)) = 0.273 Ig Del circuito central: ib2 = ‐ 100 i b1 (2.2K / (2.2K + 2K)) = ‐ 52.38 i b1 Del circuito de salida: IL = ‐ 100 i b2 (1.3K / (1.3K + 2K) = ‐ 39.4 i b2 161
Electrónica Analógica I Finalmente obtenemos: AI = (IL / ib2)(ib2 / i b1)(i b1 / Ig) = (‐ 39.4)( ‐ 52.38)( 0.273) = 563.4 AI = 563.4 c) AP= PL / Pg = (VL IL) / (Vg Ig) = AV AI = (2209.17)( 563.4) = 1 244 646.38 AP= 1 244 646.38 d) Zi Del circuito de entrada: Zi = Vg / Ig = 0.2K + 0.6K // 1.8K // 1K = 510Ω Zi = 510Ω e) Zo Zo = 1.3KΩ Del circuito de salida: Amplficador Darlington. Cuando la amplificación de una sola etapa no es suficiente, se pueden conectar también una configuración Darlington para aumentar la ganancia y elevar la impedancia de entrada. Estos amplificadores tienen el inconveniente de tener una respuesta en frecuencia más reducida y pueden oscilar, por lo que deben tomarse las precauciones adecuadas. En la figura siguiente se muestra uno de estos circuitos en la configuración de emisor común. + VCC
RC
R1
Ig
IL
C2
Q1
+
C1
Q2
Vg
R2
R3
RE
RL
+
VL
-
C3
162
Electrónica Analógica I Problema 5.11: En el siguiente amplificador Darlington, halle: a) Av b) AI c) Zi d) Zo Q1: hie1 = 3KΩ, β1 = hfe1 = 50, hre1 = 0, hoe1 = 0. Q2: hie2 = 1KΩ, β2 = hfe2 = 100, hre2 = 0, hoe2 = 0. + 30V
10K
282K
Ig
IL
C2
Q1
+
C1
Q2
Vg
18K
10K
0.3K
10K
+
VL
-
C3
Solución: a) Av: Modelo para señal: Ig
IL
Q1
+
Vg
-
Q2
282K
10K
10K
18K
+
VL
-
10K
163
Electrónica Analógica I Reemplazando cada transistor por su cuadripolo: ib1
50 ib1
Ig
Vg
-
IL
3K
+
282K
ib2
18K
10K
100 ib2
1K
En el circuito de salida: VL = ‐ (50 ib1 + 100 ib2)5K ib2 = (51 ib1)(10K) / (10K + 1K) = (510 / 11) ib1 Reemplazando: VL = ‐ 50( 1 + 1020 / 11)(ib1)5K En el circuito de entrada: Vg = 3K ib1 + 51 ib1 (10K // 1K) = [3K + 51 (10K // 1K)] ib1 De estas dos ecuaciones obtenemos la ganancia de tensión: Av = [50(5)(1 + 1020 / 11)] / [3 + 51(10 // 1)] = ‐ 474.7 Av = ‐ 474.7 b) c) AI : En el circuito de salida: IL = ‐ (50 ib1 + 100 ib2)(10K / (10K + 10K)) = ‐ 25(ib1 + 2 ib2) ib2 = (51 ib1)(10K) / (10K + 1K) = (510 / 11) ib1 Reemplazando: IL = ‐ 25( 1 + 1020 / 11)(ib1) En el circuito de entrada: Ib1 = Ig(18K // 282K) / [18K // 282K + 3K + 51 (10K // 1K)] Ib1 = 0.2553 Ig De estas dos ecuaciones obtenemos la ganancia de corriente: AI = ‐ 25(1 + 1020 / 11)(0.2553) = ‐ 598.2 AI = ‐ 598.2 Zi: En el circuito de entrada: Vg = 3K ib1 + 51 ib1 (10K // 1K) = 49.364K ib1 164
10K
10K
+
VL
-
d) Electrónica Analógica I Ig = Vg / 18K + Vg / 282K + ib1 Reemplazando ib1: Ig = Vg(1 / 18K + 1 / 282K + 1 / 49.364K) Zi = 18K // 282K // 49.364K = 12.6KΩ Zi = 12.6KΩ Zo: Modelo para hallar Zo: ib1
50 ib1
I
3K
282K
ib2
18K
10K
100 ib2
1K
V
10K
Aplicando reflexión de impedancias: ib1
I
3K
ib2/51
282K
50 ib1
18K
(51)10K
(51)1K
V
100 ib2
10K
Observamos: ib1 = ib2 = 0 Entonces: Zo = 10KΩ Amplificador cascode. Este tipo de amplificador es muy usada, incluso en circuitos integrados. Está basado en la conexión de transistores en serie. Se caracteriza por presentar ganancias de tensión y corriente altas. Muy buena respuesta en frecuencia y estabilidad. Se emplea también en alta frecuencia. En la figura siguiente se muestra uno de estos circuitos, en su versión con MOSFET: 165
Electrónica Analógica I VDD
RL
+
VL
-
Q2
+
VGG2
-
Q1
+
Vg
+
VGG1
-
Problema 5.12: En el siguiente amplificador Cascode: Q1 = Q2: hfe = 150, hie = 3.5KΩ, hre = 0, hoe = 0. Halle: 12V
12K
100uF
3K
100uF
Q1
+
8K
100uF
C
Vg
a) Av Q2
10K
VL
-
2.4K
1K
100uF
b) AI c) Zi d) Zo 166
Electrónica Analógica I Solución: a) Av: Modelo para señal: Ig
ib
ie
IL
+
Vg
b) c) d) 8K
2.4K
3.5K
150 ib
hib
- 0.99 ie
3K
10K
VL
-
En el circuito de salida: VL = 0.99 ie (3K // 10K) En el circuito central: ie = ‐ 150 ib En el circuito de entrada: Vg = 3.5K ib De estas tres ecuaciones: Av = [0.99 (3K // 10K)][‐ 150][1 / 3.5K] Av = ‐ 97.9 AI : En el circuito de salida: IL = 0.99 ie (3K) / (3K + 10K) En el circuito central: ie = ‐ 150 ib En el circuito de entrada: ib = Ig (8K // 2.4K) / [3.5K + 8K // 2.4K] De estas tres ecuaciones: AI = [0.99 (3) / 13][‐ 150][(8K//2.4K)/[3.5K+8K//2.4K]] AI = ‐ 11.83 Zi: En el circuito de entrada: Zi = 8K // 2.4K // 3.5K = 1.21K Zi = 1.21KΩ Zo: Modelo para hallar Zo: 167
Electrónica Analógica I Ig
ib
ie
I
+
8K
2.4K
3.5K
150 ib
hib
- 0.99 ie
3K
V
-
Podemos observar: Ig = 0, ib = 0, 150 ib = 0, ie = 0, ‐0.99ie = 0 Entonces: Zo = 3KΩ Amplficador bootstrap: Este amplificador actúa en forma similar al seguidor emisivo, con la diferencia que evita reducir la impedancia de entrada debido a la red de polarización. Puede lograrse con él, una impedancia de entrada muy elevada + VCC
R1
Ig
C1
R3
+
Vg
R2
C2
RE
+
VL
-
-
168
Electrónica Analógica I Problema 5.13: En el siguiente amplificador Bootstrap, halle: a) Av b) Zi Transistor: hie = 2KΩ, hfe = 100, hre = 0, hoe = 0. + 12V
4K
Ig
C1
10K
+
Vg
4K
C2
2K
+
VL
-
-
Solución: a) Av: Modelo para señal: 4K
Ig
Ig
ib
10K
10K
+
Vg
2K
+
4K
2K
+
VL
-
-
100 ib
Vg
2K
2K
+
VL
-
-
En el nudo de salida aplicamos la ley de corrientes: VL / 2K + VL / 2K = 101 ib + (Vg ‐ VL) / 10K 169
Electrónica Analógica I Además: ib = (Vg ‐ VL) / 2K Reemplazando: VL / 2K + VL / 2K = 101 (Vg ‐ VL) / 2K + (Vg ‐ VL) / 10K Separando términos: VL [1 / 2K + 1 / 2K + 101 / 2K + 1 / 10K] = Vg [101 / 2K + 1 / 10K] De esta ecuación hallamos la ganancia de tensión: Av = 0.98 b) Zi: En el circuito de entrada:´ Ig = (Vg ‐ VL) / 10K + ib = (Vg ‐ VL) / 10K + (Vg ‐ VL) / 2K Ig = (Vg ‐ VL)[1 / 10K + 1 / 2K] = Vg(1 ‐ Av)[1 / 10K + 1 / 2K] Despejando Zi = Vg / Ig : Zi = 83.33KΩ Amplificador diferencial. Uno de los amplificadores más importantes en Electrónica es el amplificador diferencial. Comúnmente recibe dos señales de entrada y su salida puede ser balanceada o desbalanceada. Se le denomina amplificador diferencial porque su salida es proporcional a la diferencia de las señales de entrada. Es parte fundamental del Amplificador Operacional. A continuación se muestra un esquema básico empleando transistores bipolares: 170
Electrónica Analógica I VCC
Rc
Vs1
Rc
Vs2
C
C
Q1.
V1
Q2
Rb
Io
Rb
V2
Io es una fuente de corriente constante que debe ofrecer una alta impedancia a la señal. Salida balanceada y salida desbalanceada. Si la salida se toma en Vs1 ó Vs2 respecto a tierra, se dice que la salida es desbalanceada. Si la salida se toma entre Vs1 y Vs2, se dice que la salida es balanceada. V1 y V2 son las señales de entrada. La salida debe ser proporcional a la diferencia de las señales de entrada, es decir: Vs = Ad (V1 – V2) Ad es la ganancia en modo diferencial La ecuación anterior corresponde a la respuesta ideal del A.D., sin embargo, los A.D. reales presentan una salida dada por la ecuación siguiente: Vs = Ad (V1 – V2) + Ac (V1 + V2) / 2 Modo diferencial y modo común. Ad es la ganancia en modo diferencial Y Ac es la ganancia en modo común. 171
Electrónica Analógica I Generalmente se busca que Ac sea lo más pequeña posible. Idealmente debería ser cero. Se define: Modo diferencial = Vd = V1 – V2 Modo común = Vc = (V1 + V2) / 2 Debe indicarse que el modo común no está formado solamente por el promedio de las señales de entrada, sino también por cualquier señal no deseada (ruido, interferencia, etc.) acoplada a ambas entradas a la vez. Si ello sucede, el amplificador tenderá a eliminarlas de su salida. Por lo anterior, podemos decir que este tipo de amplificador tiende a eliminar las señales no deseadas que se presenten en sus entradas. Para efectuar el análisis del circuito se expresan las señales de entrada mediante el modo común y el modo diferencial. V1 = Vc + Vd / 2 V2 = Vc ‐ Vd / 2 Cuando se analiza con pequeña señal podemos utilizar los modelos de cuadripolo lineal del transistor. Cuando se analiza con gran señal, debemos utilizar la característica no lineal del transistor (por ejemplo, las ecuaciones de Ebers Moll). Factor de Rechazo al Modo Común (CMRR): Este es un parámetro muy útil para saber la calidad del A.D. Se le define como: CMRR = |Ad| / |Ac| También se acostumbra expresarlo en decibeles: CMRRdb = 20 log(|Ad| / |Ac|) Idealmente el CMRR es infinito. En un A.D. real conviene que sea lo más alto posible. 172
Electrónica Analógica I La fuente de corriente constante tiene mucha importancia para conseguir una ganancia en modo común muy pequeña y, por tanto, un alto factor de rechazo al modo común. Problema 5.14: En el circuito mostrado, determine: a) Los puntos de operación. b) La ganancia en modo diferencial. c) La ganancia en modo común. d) El CMRR. + 15V
2K
Q1
4K
Q2
C
C
C
V1
12K
V2
50K
4mA
+
VL
-
50K
Q1 = Q2: β = 100, hie = 1K, hfe = 150, hre = 0, hoe = 0, VBE = 0.7V, Z = 2MΩ SOLUCION: a) Los puntos de operación. Como los transistores son iguales y sus redes de polarización también, el A.D. está balanceado y se cumple: IEQ1 = IEQ2 = 2mA Como β es grande se cumple: ICQ1 = ICQ2 = 2mA El voltaje DC en los emisores es: VE = ‐ 0.7 – 50K(2mA / 100) = ‐1.7V A continuación: VCE1 = 15 – (2mA)(2K) – VE = 15 – (2mA)(2K) – (‐1.7) = 12.7V VCE2 = 15 – (2mA)(4K) – VE = 15 – (2mA)(4K) – (‐1.7) = 8.7V VCE1 = 12.7V VCE2 = 8.7V b) La ganancia en modo diferencial. Modelo equivalente para señal: 173
Electrónica Analógica I ib1
ib2
1K
1K
V1
50K
c) d) V2
302M
50K
150 ib2
12K
4K
+
VL
-
Representamos V1 y V2 en función del modo diferencial y el modo común: V1 = Vc + Vd / 2 V2 = Vc ‐ Vd / 2 Modo diferencial: Hacemos Vc = 0 Entonces: En la entrada y aplicando simetría: Ib2 = ‐ Vd / 2K En la salida: VL = ‐ 150 ib2 (4K // 12K) Reemplazando ib2: VL = ‐ 150 (‐ Vd / 2K) (4K // 12K) Finalmente: Avd = VL / Vd = ‐ 150 (‐ 1 / 2K) (4K // 12K) = 150 (1 / 2K) (3K) Avd = 225 La ganancia en modo común. Modo común: Hacemos Vd = 0 Entonces: En la entrada y aplicando simetría: Ib2 = Vc / (1K + 604M) En la salida: VL = ‐ 150 ib2 (4K // 12K) Reemplazando ib2: VL = ‐ 150 Vc / (1K + 604M) (4K // 12K) Finalmente: Avc = VL / Vc = ‐ 150 (1 / (1K + 604000K)) (4K // 12K) = ‐150 (1 / 604001K) (3K) Avc = ‐ 0.0007 El CMRR. CMRR = │Ad│ / │Ac│ = 225 / 0.0007 = 321 428.6 En db: CMRRdb = 20 log[321 428.6] = 110.1db 174
Electrónica Analógica I Amplificador operacional (OPAMP). La designación ‘’OPAMP’’ originalmente fue adoptada para una serie de amplificadores de gran rendimiento usados en computadoras analógicas. Estos amplificadores fueron diseñados para realizar operaciones matemáticas aplicables a computación analógica (sumatoria, escalamiento, sustracción, integración, etc.) En la actualidad, la disponibilidad de amplificadores operacionales en circuitos integrados lo hacen útil como reemplazo de cualquier amplificador, especialmente en baja frecuencia. Incluso, se les usa formando parte de circuitos integrados más complejos. SIMBOLO DE UN OPAMP El símbolo aceptado para un opamp es un triángulo y la salida, Vo, está relacionada con las entradas V+ y V‐ como se muestra en la figura siguiente Vo
+ SATURACION
V+
V-
+
Voffset
Vo
-
V+ - V-
- SATURACION
+
V se aplica a la entrada no inversora y V‐ a la entrada inversora. EJEMPLO DEL OPAMP LM741 Fuentes de corriente
de polarización
Entrada inversora
Salida
+
Entrada no inversora
A = 200
A = 1000
175
A = 1
Electrónica Analógica I Como se puede ver, un IC‐OPAMP usa varias etapas en cascada, generalmente amplificadores diferenciales, para suministrar un alto rechazo al modo común y gran ganancia. Amplificador inversor: En este caso la señal de entrada se aplica por la entrada inversora. If
R2
R1
VAv
ideal
+
I1
Ve
+
V+
-
+
Vs
R3
-
If = (V‐ – Vs)/R2 Tenemos: I1 = (Ve – V‐)/R1 Además: Vs = Av(V+ ‐ V‐) Como no hay señal aplicada a la entrada no inversora y la impedancia de entrada del operacional es muy alta: V+ = 0 Entonces: Vs = ‐ Av V‐ De donde: V‐ = Vs / Av Como la ganancia de un amplificador operaconal ideal es muy alta: Av → ∞ Se deduce: V‐ → 0 Y la entrada inversora se comporta en este caso como tierra virtual. A continuación podemos obtener la ganancia con realimentación: Debido a la alta impedancia de entrada del amplificador operacional, debe cumplirse: I1 = If Entonces: (Ve)/R1 = (– Vs)/R2 Finalmente: Avf = ‐ R2 / R1 176
Electrónica Analógica I Adicionalmente podemos obtener la impedancia de entrada del circuito: Zinf = Ve / I1 = R1 NOTA: El resultado anterior puede ser generalizado si tomamos en cuenta que R1 y R2 pueden ser reemplazadas por cualquier impedancia (Z1 y Z2 respectivamente): Avf = ‐ Z2 / Z1 Zinf = Z1 Problema 5.15: En el siguiente circuito, halle: a) El voltaje V. b) El voltaje de salida. 4K
V
6K
8K
2K
1V
+
VL
-
+
SOLUCION: a) El voltaje V. Como está realimentado negativamente, el amplificador actúa linealmente Y se cumple: V+ = V‐ La corriente que entrega el generador es: I = Vg / 2K = 0.5mA Esta corriente circula por la resistencia de 4K y se cumple: V = ‐ 4K I = ‐ 4K (0.5mA) = ‐ 2V V = ‐ 2V b) El voltaje de salida. Aplicando la ley de corrientes en el nudo V: 0.5mA = V / 6K + (V ‐ VL) / 8K 177
Electrónica Analógica I Reemplazando V y despejando VL: 12V = 4(‐2V) + 3(‐2 ‐ VL) VL = (26 / 3)V = ‐ 8.67V Amplificador no inversor: En este caso la señal de entrada se aplica por la entrada no inversora. R2
If
R1
V-
Av
ideal
I1
V+
+
+
+
Vs
R3
-
Ve
-
‐
‐
I1 = (V )/R1 If = (Vs ‐ V )/R2 Ve = V+ y Vs = Av(V+ ‐ V‐) V+ ‐ V‐ = Vs / Av Tenemos: Además: De donde: Pero como la ganancia de un amplificador operaconal ideal es muy alta: Av → ∞ Se deduce: V+ ‐ V‐ → 0 Y se cumple: V+ = V‐ La entrada diferencial se comporta en este caso como cortocircuito virtual. A continuación podemos obtener la ganancia con realimentación: Debido a la alta impedancia de entrada del amplificador operacional, debe cumplirse: I1 = If Entonces: (Ve)/R1 = (Vs – Ve)/R2 Avf = 1 + R2 / R1 Finalmente: Adicionalmente podemos obtener la impedancia de entrada del circuito: Zinf = R3 178
Electrónica Analógica I Problema 5.16: En el circuito con OPAMP mostrado, halle el voltaje de salida, VL, si; V1 = 0.2V, V2 = 0.1V y V3 = ‐ 0.15V. Asuma que el OPAMP es ideal. 3K
6K
-
V1
+
1K
V2
1K
100
+
VL
-
V3
1K
SOLUCION: La tensión de entrada ingresa por el tertminal no inversor y la denominamos: V+ Hallamos V+ en función de las tensiones de entrada, aplivcando superposición: V+ = [V1(1K//1K//0.1K) + V2(1K//1K//0.1K) + V3(1K//1K//0.1K)] / (1K + 1K//1K//0.1K) V+ = [V1 + V2 + V3]]1K//1K//0.1K] / (1K + 1K//1K//0.1K) Reemplazando valores: V+ = [0.2 + 0.1 ‐ 0.15][1K//1K//0.1K] / (1K + 1K//1K//0.1K) V+ = [0.15][83.3] / (1083.3) = 11.5 mV La tensión de salida se puede hallar mediante la ecuación del amplificador no inversor: VL = (1 + 6K / 3K) V+ = 3 V+ = 34.6 mV VL = 34.6 mV Análisis con gran señal con la ecuación de transferencia del transistor. Cuando el BJT está en la zona activa, su corriente de colector puede expresarse con la ecuación: I C (t ) = αI ES ε
VBE
VT
Si en la entrada del transistor aplicamos la tensión: VBE = VBEQ + Vbe Reemplazando: 179
Electrónica Analógica I I C (t ) = αI ES ε
VBEQ
Vbe
VT
εV T
Vbe = Vm cos(wo t ) Si: y x =
Vm
VT
Desarrollando la exponencial, con señal, en serie de Fourier: ε
Vbe
VT
=ε
Vm cos ( wo t )
VT
∞
= ε x cos (wot ) = I o ( x ) + 2∑ I n ( x ) cos(nwo t ) 1
In(x) son las funciones modificadas de Bessel de primera clase, orden n y argumento x. Estas funciones pueden hallarse, para cada valor de n, resolviendo la integral: π
1
I n (x ) =
ε z cos (φ ) cos(nφ )dφ ∫
2π −ο
Reemplazando en Ic(t): ∞
⎡ VBEQ ⎤ ⎡
⎤
I c (t ) = αI ES ⎢ε VT ⎥ ⎢ I 0 ( x ) + 2∑ I n ( x ) cos(nwo t )⎥ ⎢⎣
⎥⎦ ⎣
1
⎦
⎡ VBEQ ⎤
Se cumple: I CQ = αI ES ⎢ε VT ⎥ ⎢⎣
⎥⎦
Reemplazando: ∞
⎡
⎤
I c (t ) = I CQ ⎢ I 0 ( x ) + 2∑ I n ( x ) cos(nwo t )⎥ 1
⎣
⎦
Factorizando Io(x): ∞ ∞
⎡
⎤
I (x )
I c (t ) = I CQ I 0 (x )⎢1 + 2∑ n cos(nwo t )⎥ 1 I 0 (x )
⎣
⎦
Llamando: I DC = I CQ I 0 ( x ) 180
Electrónica Analógica I ICQ = Corriente de bias (polarización) del transistor. IDC = Corriente promedio del transistor. Para señales pequeñas, IDC es prácticamente igual a ICQ. Para señales grandes, IDC es mayor que ICQ. Desarrollando ic(t): I (x )
I (x )
I (x )
I C (t ) = I DC + 2 I DC 1 cos(wo t ) + 2 I DC 2 cos(2 wo t ) + 2 I DC 3 cos(3wo t ) + K
I 0 (x )
I 0 (x )
I 0 (x )
Para señales grandes vemos que, además de la armónica fundamental, aparecen 2da. Armónica, 3ra. Armónica, 4ta. Armónica, etc. Si la entrada es una señal sinusoidal, debido a las armónicas, la señal de salida no será sinusoidal y tendrá distorsión A continuación se muestran tablas con valores de las funciones de bessel: x Io(x) I1(x) I2(x) I3(x) 0.0 1.0000 0.00000 0.00000 0.00000 0.5 1.0635 0.25789 0.03191 0.00265 1.0 1.2661 0.56516 0.13575 0.02217 1.5 1.6467 0.98167 0.33783 0.08077 2.0 2.2796 1.59060 0.68895 0.21274 2.5 3.2898 2.51670 1.27650 0.47437 3.0 4.8808 3.9534 2.2452 0.95975 3.5 7.3782 6.2058 3.8320 1.82640 4.0 11.3020 9.7595 6.4222 3.33730 4.5 17.4810 15.3890 10.6420 5.93010 5.0 27.2400 24.3360 17.5060 10.33100 5.5 42.695 38.588 28.663 17.743 6.0 67.234 61.342 46.787 30.150 6.5 106.290 97.735 76.220 50.830 7.0 168.590 156.040 124.010 85.175 7.5 268.16 249.580 201.610 142.060 8.0 427.56 399.87 327.59 236.07 8.5 683.16 641.62 532.19 391.17 9.0 1093.6 1030.9 864.49 646.69 9.5 1753.5 1658.4 1404.30 1067.20 10.0 2815.7 2671.0 2281.50 1758.40 181
Electrónica Analógica I Si la carga (RL) está en el colector, la tensión de salida será: VL (t ) = I c (t )RL = I DC RL + 2 I DC RL
I (x )
I (x )
I1 (x )
cos(wo t ) + 2 I DC 2 cos(2wo t ) + 2 I DC 2 cos(3wo (t )) + K
I 0 (x )
I 0 (x )
I 0 (x )
La armónica fundamental será: V L1 (t ) = I c1 (t )R L = 2 I DC R L
I 1 (x )
cos(wo t ) I 0 (x )
Definimos la transconductancia para gran señal como: I c1 pico
⎡ 2 I (x ) ⎤
Gm (x ) =
= I DC ⎢ 1
⎥ Vm
⎣Vm I 0 ( x ) ⎦
Dividiendo numerador y denominador por VT obtenemos: Gm (x ) ⎡ 2 I1 (x ) ⎤
=⎢
⎥ gm
⎣ xI 0 ( x ) ⎦
Tabla con valores de Gm(x)/ gm: Gm (x )
Gm (x )
x x gm
gm
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0000 0.9987 0.9950 0.9888 0.9804 0.9699 0.9574 0.9432 0.9275 0.9106 1.0 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 0.8926 0.8738 0.8544 0.8347 0.8147 0.7946 0.7747 0.7549 0.7354 0.7163 x Gm (x )
gm
x Gm (x )
gm
x Gm (x )
gm
2.0 2.1 2.2 2.3 2.4 2.5 2.6 2.7 2.8 2.9 0.6976 0.6794 0.6617 0.6445 0.6279 0.6118 0.5963 0.5814 0.5670 0.5532 3.0
3.1
3.2
3.3
3.4
3.5
3.6
3.7
3.8
3.9
0.5399
0.5270
0.5147
0.5029
0.4915
0.4805
0.4700
0.4598
0.4501
0.4407
4.0 4.1 4.2 4.3 4.4 4.5 4.6 4.7 4.8 4.9 0.4317 0.4230 0.4146 0.4065 0.3987 0.3912 0.3839 0.3769 0.3702 0.3636 182
x Gm (x )
gm
x Gm (x )
gm
x Gm ( x )
gm
Electrónica Analógica I x Gm ( x )
gm
x Gm (x )
gm
5.0 0.3573 6.0 0.3041 7.0 0.2644 8.0 0.2338
9.0 0.2095
5.1 0.3512 6.1 0.2996 7.1 0.2610 8.1 0.2311
9.1 0.2073
5.2 0.3453 6.2 0.2952 7.2 0.2577 8.2 0.2285
9.2 0.2052
5.3 0.3395 6.3 0.2910 7.3 0.2544 8.3 0.2259
9.3 0.2031
5.4 0.3340 6.4 0.2869 7.4 0.2513 8.4 0.2234
9.4 0.2011
5.5 0.3286 6.5 0.2829 7.5 0.2482 8.5 0.2210
9.5 0.1991
5.6 0.3286 6.6 0.2790 7.6 0.2451 8.6 0.2186
9.6 0.1971
5.7 0.3183 6.7 0.2752 7.7 0.2422 8.7 0.2162
9.7 0.1952
5.8 0.3134 6.8 0.2715 7.8 0.2393 8.8 0.2139
9.8 0.1934
5.9 0.3087 6.9 0.2679 7.9 0.2365 8.9 0.2117
9.9 0.1915
Problema 5.17: Si un transistor recibe una señal de entrada de 26 mV, halle la distorsión de segundo armónico en la salida. Asuma: VT = 26Mv SOLUCION: La distorsión de segundo armónico se define como el valor eficaz del segundo armónico dividido por el valor eficaz de la armónica fundamental. Esta división se expresa en porcentaje: D2 = [2IDC[I2(x) / Io(x)]/√2] / 2IDC[I1(x) / Io(x)]/√2] = [I2(x)] / [I1(x)] Reemplazando valores y efectuando para x = 26mV / 26mV = 1: D2 = I2(1) / I1(1) = 0.13575 / 0.56516 = 0.24 = 24% D2 = 24% Esto significa que la amplitud de la segunda armónica es el 24% de la amplitud de la fundamental Teorema de Miller. Este teorema es útil para simplificar circuitos y en cálculos de respuesta en alta frecuencia. Sea el caso de una impedancia Z colocada entre los nudos A y B de una red: La corriente que sale del nudo A hacia B es: IA = (VA – VB) / Z = VA (1 – K) / Z 183
Electrónica Analógica I Donde : K = VB / VA Es decir, que si conocemos el valor de K podemos poner una impedancia entre el nudo A y tierra con valor: ZA = Z / (1‐K) y la corriente que salga del nudo A será la misma IA. En forma similar, la corriente que sale del nudo B hacia A es: IB = (VB – VA) / Z = VB (1 – 1/K) / Z Donde : K = VB / VA Es decir, que si conocemos el valor de K podemos poner una impedancia entre el nudo B y tierra con valor: ZB = Z K / (K‐1) y la corriente que salga del nudo B será la misma IB. Z
B
A
B
A
RED
Z
/
(1-K)
Z
K
/
(K-1)
Para poder usar el Teorema de Miller debemos conocer previamente la relación de tensiones entre los nudos B y A. Este teorema es útil para determinar el polo dominante en circuitos con realimentación capacitiva. Problema 5.18: En el circuito mostrado, halle el circuito equivalente Miller 1pF
0.5K
+
Vg
-
2K
+ ib
Vb
-
150 ib
40K
4K
+
VL
184
Electrónica Analógica I SOLUCION: Si se cumple que la reactancia de 1pF es mucho mayor que: 40K // 4K, podemos hallar fácilmente K: K = VL / Vb VL = ‐ 150ib (40K//4K) ib = Vb / 2K Luego: VL = ‐ 150(Vb / 2K)(40K//4K) = ‐ 75Vb(40//4) Finalmente: K = VL / Vb = ‐ 272.7 Entonces: ZA = Z / (1‐K) = 1 / jwC(273.7) = 1 / jw(273.7pF) ZB = Z K / (K‐1) = 1 / jw(1pF) Modelo equivalente de Miller: 0.5K
+
Vg
-
+
Vb
-
2K
ib
150 ib
273.7pF
1pF
40K
4K
+
VL
-
Teorema de sustitución. Este teorema es muy útil para hacer modelos simplificados de los circuitos electrónicos. Este teorema establece lo siguiente: Un voltaje conocido en un circuito puede ser reemplazado por una fuente de voltaje ideal. Una corriente conocida en un circuito puede ser reemplazada por una fuente de corriente ideal. Problema 5.19: En el circuito mostrado: a) Calcule las tensiones y corrientes en cada componente b) Reemplace la resistencia R3 por una fuente de tensión ideal con la tensión V3 y calcule las tensiones y corrientes en cada componente c) Reemplace la resistencia R3 por una fuente de corriente ideal con la corriente I3 y calcule las tensiones y corrientes en cada componente 185
Electrónica Analógica I I1
12V
R1 = 2K
+ V1 - +
V2 R2 = 6K
I2
+
V3
-
R3 = 3K
I3
a) Tensiones y corrientes en cada componente Hallamos I1: I1 = 12V / (2K + 6K // 3K) = 3mA Luego: V1 = (3mA)(2K) = 6V Entonces: V2 = V3 = 12V – 6V = 6V Finalmente: I2 = V2 / 6K = 1mA I3 = V3 / 3K = 2mA b) Reemplace la resistencia R3 por una fuente de tensión ideal con la tensión V3 y calcule las tensiones y corrientes en cada componente I1
12V
R1 = 2K
+ V1 - +
V2 R2 = 6K
I2
+
V3=6V
I3
Hallamos I1: I1 = (12V – 6V)/ 2K = 3mA Del circuito: V2 = V3 = 6V Finalmente: I2 = V2 / 6K = 1mA I3 = I1 – I2 = 2mA Vemos que ninguna tensión ni corriente ha variado al sustituir V3 por una fuente de tensión ideal. 186
c) Electrónica Analógica I Reemplace la resistencia R3 por una fuente de corriente ideal con la corriente I3 y calcule las tensiones y corrientes en cada componente I1
12V
R1 = 2K
+ V1 - +
+
R2
=
6K
V2
V3
I2
I3=2mA
I3
Empleando el método de nodos: (12 – V2) 2K = V2 / 6K + 2mA Resolviendo: V2 = 6V = V3 Luego: V1 = 12V – 6V = 6V Finalmente: I1 = 6V / 2K = 3mA I2 = 6V / 6K = 1mA I3 = 2mA Vemos que ninguna tensión ni corriente ha variado al sustituir I3 por una fuente de corriente ideal. 187
Electrónica Analógica I UNIDAD TEMÁTICA No. 6 REGULADORES REFERENCIAS DE VOLTAJE: Hay 2 tipos de referencia de voltaje comúnmente usada en los reguladores. 1) La referencia band‐gap o ∆VBE: Este método consiste en el hecho que dos transistores trabajando a dos densidades de corriente diferentes, desarrollan una diferencia de voltaje base.‐ emisor predecible. Es usado en los reguladores integrados de mayor corriente (0.5A á 3A). Un circuito básico se muestra a continuación: +
I
+ Vref
I2
R3
I1
+
R2 V2
Q3
Q2
+
VBE
-
Q1
R1
Se demuestra que: +
V1
-
V1 = ∆VBE = VT ln(I1/I2) 189
Electrónica Analógica I 2) Además: V2 = (R2/R1)∆VBE Luego: Vref = VBE3 + (R2/R1)∆VBE Si se elige adecuadamente la ganancia, (R2/R1), el coeficiente negativo de temperatura de VBE3 se puede compensar con el positivo de ∆VBE, haciendo que el coeficiente total esté cercano a cero. Ventajas: Bajo ruido Mejor estabilidad a largo plazo. Desventajas: Dificultad para controlar la tolerancia inicial de voltaje debido a que el voltaje base‐emisor varía con el ancho de la base. Mayor deriva térmica Los efectos de los gradientes térmicos son más severos. La referencia con diodo zener: Este método consiste en un diodo zener trabajando en su zona de ruptura. Es usado en los reguladores integrados de baja corriente (0.1A á 0.25A). Ventajas: Pocos componentes. Buen control de voltaje inicial. Desventajas: Mala estabilidad a largo plazo. Alto ruido. Puede ser mejorado si se hace un implante iónico de una región altamente contaminada por debajo de la superficie. REGULADORES DE TENSIÓN. Son circuitos que se conectan entre la fuente primaria y la carga. Debe adaptarse a las características de la fuente primaria y a la carga. Es un circuito activo que reacciona ante cualquier cambio de la entrada o de la carga para que la salida se mantenga estable. 190
Electrónica Analógica I TIPOS DE REGULADORES DE TENSIÓN: Podemos clasificarlos, por su forma de operación, en: 1.
Reguladores lineales. Reguladores no lineales o de conmutación. 2.
REGULADORES LINEALES: Operan siempre con un nivel de tensión de entrada superior al de salida. Equivalen a una resistencia cuyo valor se ajusta automáticamente para que la salida se mantenga constante. Disipan energía y no tienen muy buena eficiencia. Producen menos ruido en la carga y en la red AC. A su vez, se pueden clasificar como: 1.
Regulador paralelo: Cuando el dispositivo de regulación está en paralelo con la carga. Un ejemplo de ello es el regulador con diodo zener. Es el menos eficiente y comúnmente se le emplea para corrientes bajas o como circuito de referencia de tensión. R
Reg.
RL
VCC
Regulador con diodo zener: Es un tipo de regulador paralelo muy usado comúnmente para corrientes bajas. A continuación se muestra un ejemplo. Problema 6.1: En el circuito mostrado se tiene: 20mA ≤ILDC ≤ 200mA y 20V ≤ VCC ≤ 30V Halle: 191
Electrónica Analógica I a) El valor más adecuado y la potencia máxima de R. ILDC
R
15V
VCC
Izk = 5mA
La potencia máxima que disipará el zener. +
RL VDC
-
b) Solución: a) Valor más adecuado y la potencia máxima de R: R = (VCC ‐ 15) / (5 + ILDC) El peor caso se presenta cuando VCC es mínima e ILDC es máxima. Entonces: R = (20 ‐ 15) / (5 + 200) = 24.39Ω R = 24.39Ω La potencia será ,máxima en R cuando VCC sea máxima: Pmáx = 9.23W Pmáx = (30 ‐ 15)2 / (24.39) =9.23W b) Potencia máxima que disipará el zener: El zener disipará máxima potencia cuando la tensión de entrada sea máxima y la corriente en la carga, mínima:. Pzmáx = (15V)[(15 / 24.39) ‐ 20mA] = 8.93W Pzmáx= 8.93W Regulador serie: Cuando el dispositivo de regulación está en serie con la 2.
carga. Son los más usados y tienen más eficiencia que el regulador paralelo. 192
Electrónica Analógica I Reg.
RL
VCC
Tipos de reguladores serie: Hay diversos tipos de reguladores serie y que pueden tener protecciones para evitar exceso de corriente y / o tensión en la carga o de disipación de potencia de los dispositivos de regulación. Un diagramas de bloque típico es el siguiente: Dispositivo
Regulador
Idc
I
RL
Comparador
FUENTE NO REGULADA
Referencia
de Voltaje
Salida
EJEMPLOS DE REGULADORES LINEALES: A continuación son mostrados algunos ejemplos de reguladores discretos. Fuente regulada con protección contra corto circuito: Este regulador incluye protección contra cortocircuito. Q2 hace el papel de comparador. Vz produce la tensión de referencia. El potenciómetro sirve para ajustar el voltaje de salida. R1 sirve para dar el arranque inicial a la fuente. 193
Electrónica Analógica I R1
Q1
R3
VZ
POT
RL
Q2
FUENTE NO REGULADA
Salida
R2
R4
Fuente regulada con BJT: En este regulador la fuente de corriente es representada por Q1. Q2 es el dispositivo regulador. Obsérvese que está en la configuración de seguidor emisivo para reducir la impedancia de salida. Vz1 produce la tensión de referencia. El potenciómetro sirve para ajustar el voltaje de salida. Q2
R2
R3
R4
VZ1
Q1
VCC
RL
POT.
Q3
R1
R5
VZ2
SALIDA
REGULADORES NO LINEALES O DE CONMUTACIÓN (SWITCHING). Su funcionamiento es completamente diferente al regulador lineal, con el objetivo de no desperdiciar energía en forma de calor. Debido a que evitan el desperdicio de energía, su eficiencia puede ser cercana a la unidad. 194
Electrónica Analógica I A su vez, se pueden clasificar como: 1.
Regulador conmutado a frecuencia de la red: Emplea interruptores que se bloquean cuando la tensión de la red AC cambia de polaridad. Comúnmente los interruptores son realizados mediante SCR. Requieren un circuito de control que detecte los pasos por cero de la tensión AC. L
T1
T2
D1
C
RD
RL
220Vac
CONTROL
D1
D1
SALIDA
2.
Regulador conmutado a frecuencia propia: Emplea interruptores que se bloquean cuando el control lo dispone. El control incluye un oscilador interno cuya frecuencia es fijada en el orden de los KHz y es la que define la velocidad con la que los interruptores abrirán y cerrarán. El tiempo que el interruptor está abierto o cerrado se controla con técnicas de modulación, entre las cuales se usa más la PWM (modulación de ancho de pulsos). La siguiente figura muestra el esquema simplificado de un regulador reductor (Buck). Q1 hace el papel de interruptor. D1 es un diodo volante. El filtro L‐C elimina los armónicos y deja pasar la continua a la carga. El control detecta el voltaje de salida y controla el tiempo de encendido del interruptor, además de definir la frecuencia de conmutación. L
Q1
D1
VCC
C
RD
RL
CONTROL
SALIDA
195
Electrónica Analógica I Diseño de un regulador discreto: A continuación, se muestra el diseño de un regulador típico en el que se emplea un transistor como comprador. En su lugar también se puede emplear un amplificador diferencial o un operacional. Problema 6.2: Diseñe el siguiente regulador discreto para obtener una tensión de salida de 12 Vdc y 1 A. Q2
R2
R3
R4
VZ1
Q1
VCC
RL
POT.
Q3
R1
R5
VZ2
SALIDA
Solución: Elegimos un transistor Q2 con ganancia β = 50 Para que el diodo zener, Z2, esté en su zona de ruptura lo polarizaremos con 10mA. Por la red de muestreo del voltaje de salida, haremos pasar una corriente mucho mayor que la de base de Q2. Elegimos: IR4 = 5mA La corriente de emisor de Q2 será: IE2 = 1 A + 10 mA + 5 mA = 1.015 A La corriente de base de Q2 será: IB2 = 1.015 A / 51 = 19.9 mA La corriente de colector de Q1 debe ser mayor que IB2 para que Q3 se mantenga en la zona activa. La fijamos en: IC1 = 25 mA Para lograr estabilidad térmica, elegimos Z1 y Z2 de 6.2V. esto nos permite hallar R2 R2 = (6.2 – 0.7) / 25 mA = 220Ω R2 = 220Ω Z1 = Z2 = Zener de 6.2V 196
Electrónica Analógica I Luego: R3 = (12 – 6.2) / 10 mA = 560Ω R3 = 560Ω Además: R4 + Pot + R5 = 12V / 5mA = 2.4KΩ También debe cumplirse: (5mA)R5 < 6.2V + 0.7V = 6.9V R5 < 6.9V / 5 mA = 1.38K R5 = 1KΩ Entonces: R4 + Pot = 1.4 KΩ Además: (5mA) (R5 + Pot) > 6.9V (R5 + Pot) > 1.38KΩ Pot > 380Ω Pot = 500Ω Finalmente, R4 = 2.4K – 1K – 0.5K = 0.9KΩ R4 = 910Ω Para que Q2 siempre esté en la zona activa, haremos que el voltaje colector – emisor de Q2 no sea menor que 12V. Esto asegura que Q1 también esté en la zona activa. Entonces, la tensión de entrada deberá ser: VCC = 12V + 12V = 24V VCC = 24V Haremos que la corriente en Z1 sea 10mA De aquí: R1 = (24 – 6.2) / 10mA = 1.78K R1 = 1.8KΩ A continuación se muestra el circuito con sus valores: Q2
2N3055
R2
220
Z1
R4
910
6V2
R3
560
Q1
2N2905
+ VCC
24V
Pot
500 86%
Q3
2N2222
R1
1.8k
Z2
6V2
RL
12
R5
1k
197
Electrónica Analógica I Tensión de salida en vacío = 12.07V Tensión a plena carga = 11.84V Regulación = 1.9% REGULADORES CON CIRCUITOS INTEGRADOS: A continuación veremos los reguladores más comunes así como sus características y aplicaciones: Regulador paralelo programable TL431: Actúa en forma similar a un diodo zener, con la diferencia que su voltaje puede ser ajustado en un rango de 2.5V á 36V. Puede recibir corrientes entre 1 y 100 mA. Su resistencia dinámica es de 0.2Ω. En la gráfica siguiente se muestran sus tipos de encapsulados y terminales. Top view = Vista superior Bottom view = Vista inferior Front view = Vista frontal Cathode = Cátodo Anode = Anodo REF = Referencia Diagrama de bloques y símbolo: CATODO
REF.
CATODO
REF.
2.5 Vref.
ANODO
ANODO
198
Electrónica Analógica I CIRCUITO EQUIVALENTE DEL TL431: CATODO
800
800
20pF
REF.
150
3.28K
10K
4K
2.4K
7.2K
20pF
1K
900
ANODO
Características de operación recomendadas: CARACTERISTICA MINIMO Voltaje de cátodo Vref = 2.5V Corriente de cátodo 1mA 199
MAXIMO 36V 100mA Electrónica Analógica I Aplicaciones: 1.‐ Regulador paralelo: R
+
R1
Vz = Vref(1+ R1/R2)
VCC
R2
+
Vref
-
-
La resistencia R define la máxima corriente del regulador. La corriente que circula por R2 es: I = Vref / R2 La tensión en R1 es prácticamente: V = I R2 = Vref (R1/ R2) Finalmente: Vz = V + Vref = Vref (1 + R1/ R2) 2.‐ Regulador paralelo de alta corriente: R
R3
VCC
R2
+
R1
Vz = Vref(1+ R1/R2)
+
Vref
-
-
La resistencia R3 define la máxima corriente por el transistor. 200
Electrónica Analógica I Problema 6.3: En el regulador mostrado se quiere obtener: VL = 15V é IL = 0.5 A. a) Calcule los valores de R1 y R2. b) Calcule el valor de R si VCC = 30V. c) ¿Qué corriente maneja el transistor cuando: IL = 0.5 A? d) ¿Qué valor debe tener R3? R
R3
+
R1
Vz = Vref(1+ R1/R2)
RL
VCC
R2
+
Vref
-
TL 431
Datos: TL431: Vz = 2.5(1 + R1/ R2) corriente mínima: Izmín = 2 mA Asuma: IR1 = 1 mA Transistor: VEB = 0.7V, β = 50 Icmín = 10mA SOLUCION: a) Valores de R1 y R2. El voltaje en la carga es 15V. Entonces: 15 = 2.5(1 + R1/ R2) De donde: R1/ R2 = (15 / 2.5) ‐ 1 = 5 Elegimos: R2 = 1.5KΩ luego: R1 = 7.5KΩ R2 = 1.5KΩ R1 = 7.5KΩ b) Valor de R si VCC = 30V. Considerando la máxima corriente en la carga: 30 = R(500mA + 30V / (7.5K + 1.5K) + 2 mA + 10mA / 50 + 10mA) + 15 Despejando R: R = 15 / (515.53mA) = 29.1Ω R = 29.1Ω 201
Electrónica Analógica I c) ¿Qué corriente maneja el transistor cuando: IL = 0.5 A? Según datos, debe manejar Icmín = 10mA Icmín = 10mA d) ¿Qué valor debe tener R3? Para asegurar Izmín = 2 mA en el regulador: R3 = 0.7V / 2mA = 350Ω R3 = 350Ω Regulador variable LM317: Es un circuito cuyo voltaje puede ser variado entre 1.2V y 37V, con corriente máxima de 1.5 Amperios. Posee también limitación de corriente y protección térmica. Estos reguladores forman una familia y así, el LM337 es la versión de tensión negativa de 1.5 A, el LM338 es la versión de 5 A, A continuación se muestra el encapsulado TO‐220 del LM417 y terminales: LM317T
1
2
3
Pin 1 = Adj. = Ajuste Pin 2 = Out = Salida Pin 3 = In. = Entrada 202
Electrónica Analógica I Diagrama de bloques: 3 = Input
+
Circuito de
Protección
1.25 Vref.
R lim.
2 = Out
1 = Adj.
CIRCUITO EQUIVALENTE DEL LM338: 3 Vin
R1
330
R2
330
R3
190
R4
82
R5
5.6K
Q22
R19
370
Q10
Q23
R16
6.7K
Q18
Q2
Q4
Q8
Q1
Q16
R18
130
Q20
R27
47K
5pF
C3
R23
18K
R21
400
Q13
200K
D2
6.3V
Q26
Q27
R6
Q25
R17
12K
Q14
R22
160
R8
12.4K
Q15
Q19
R7
130
Q21
D3
R20
13K
Q17
Q24
6.3V
Q9
Q6
Q11
Q7
Q12
R15
2.4K
C1
Q3
Q5
R10
4.1K
6.3V
R24
160
C2
D1
R11
5.8K
R12
72
R13
5.1K
30pF
30pF
R14
12K
R26
0.03
R7
130
6V
R25
3
R27
50
D4
2 Vout
1 Adj
Características de operación: CARACTERISTICA Iadj Vin ‐ Vout Vref Iout MINIMO ‐‐ 3V 1.2V 12mA 203
MAXIMO 100mA 40V 1.3V 1.5A Electrónica Analógica I Aplicaciones: 1.‐ Regulador variable: 1
VIN
LM317
VOUT
3
Salida
ADJ
Entrada
2
R1
0.1uF
1uF
R2
Vsalida = 1.25V (1 + R2 / R1) Regulador variable con protección contra descarga capacitiva: D1
1N4002
Entrada
Salida
VIN
LM317
VOUT
3
ADJ
1
2
2.‐ R1
C > 25uF
0.1uF
R2
D2
1N4002
1uF
204
3.‐ Electrónica Analógica I Regulador variable con salida de 0 – 30V: D1
1N4002
Entrada
Salida
VIN
LM317
VOUT
3
2
ADJ
1
R1
0.1uF
C > 25uF
10uF
R2
D2
1N4002
1uF
-12 a -18V
470
LM329C
205
Electrónica Analógica I 4.‐ Cargador de batería de 12V con LM317: 500
Vin > 18V
0.5
Salida
VIN
LM317
VOUT
3
LED
ADJ
1
2
15
1K
230
0.1uF
6
+
LM741
-
15K
1N4148
1uF
BATERIA
12V
7
U9
3
2
2N2905
4
3K
Regulador variable LM723: Es un circuito muy versátil, con el cual se pueden hacer reguladores fijos y variables, positivos o negativos e incluso de alto voltaje y alta corriente. Su tensión de entrada máxima es 40V y su corriente máxima con salida en cortocircuito es 65 mA En el siguiente esquema se muestra su encapsulado DIL 14 y terminales de conexión: LM723
1
2
3
4
5
6
7
NC
NC
CL
FC
CS
V+
IN-
VC
IN+
Vout
Vref
VZ
V-
NC
14
13
12
11
10
9
8
206
Pin 1: NC = No conectado Pin 2: CL = Límite de corriente Pin 3: CS = Sensado de corriente Pin 4: IN‐ = Entrada inversora Pin 5: IN+ = Entrada no inversora Pin 6: Vref = Tensión de referencia Pin 7: V‐ = Tierra Diagrama de bloques: Electrónica Analógica I Pin 8: NC = No conectado Pin 9: Vz = Zener Pin 10: Vout = Salida Pin 11: Vc = Tensión de control Pin 12: V+ = Tensión de alimentación Pin 13: FC = Compensación de frecuencia Pin 14 NC = No conectado 12
V+
11
Vc
7
13
FC
VZ2
6
5
Vref
-
13
Vout-10
4
4
+
VZ - 9
V7
CL - 2
CS - 3
207
Electrónica Analógica I REGULADOR DE 35 V – 20 A CON LM723: D1
6A / 600V
R13
2N3055
+VDC
Q1
+ 35 VDC
0.47 / 5W
R7
47
R1
470
R14
2N3055
Q2
R8
47
0.47 / 5W
R2
470
R15
2N3055
Q3
0.47 / 5W
R9
47
R3
470
R16
2N3055
Q4
R10
47
0.47 / 5W
R4
470
R17
2N3055
Q5
0.47 / 5W
R11
47
R5
470
R18
2N3055
Q6
R12
47
R6
470
0.47 / 5W
R19
100
R20
5.6K
GND
- VDC
TIP31C
R21
470
C1
0.1uF
R23
Q7
R22
470
P1
100K
3K3
17 VAC
14
U1
OUT
VC
18
D3
1N4004
VCC+
D2
1N4004
16
Z1
3V 9
D6
3
CL
LM723
1N4148
VCC-
4
CS
10
VREF
IN+
8
9
FC
C3
6
D5
1N4004
19
D4
1N4004
IN-
C2
2200uF / 25V
R28
R29
100K
680pF
100K
R25
3K3
C4
R30
3K3
R27
680
100uF / 16V
R24
1K
R26
3K3
D7
1N4148
P2
100K
C5
10uF / 63V
208
REGULADOR DE 35 V / 20 A
Electrónica Analógica I REGULADOR DE 5V / 1.5 A 1N4005
LM317
1
VIN
VOUT
3
+ 5 VDC / 1.5A
ADJ
+
121
1N4005
2
0.1uF/50V
1000uF/50V
100uF/25V
365
-
100uF/50V
REGULADOR DE 20V / 5 A 1N4005
LM338K
1
VIN
3
VOUT
+ 20 VDC / 5A
ADJ
+
0.1uF/50V
0.1uF/50V
121
2
22000uF/50V
100uF/25V
0.1uF/50V
22uF/50V
1.82K
-
100uF/50V
REGULADOR DE ‐ 20V / 1.5 A 1N4005
LM337
1
VOUT
3
- 20 VDC / 1.5A
ADJ
-
VIN
1N4005
121
0.1uF/50V
2
1000uF/50V
100uF/25V
100uF/50V
1.82K
+
209
Electrónica Analógica I REGULADOR DE 25V / 6 A 0.1uF
MJ3000
0.1uF
0.2/5W
220
9
VZ
11
10
OUT
VC
VCC+
0.2/5W
10K
MJ3000
0.2/5W
-
GND
10
1K
7
VREF
0.2/5W
6
IN+
IN-
5
+
27V
LM723
4
2
CL
1nF
FRQCOMP
2.2/10W
CS
-
47K
3
VARISTOR
12
8A
13
+
30V
390pF
50pF
+ 20V
5.1K
1K
47K
Q3
SCR
1N4148
3.3V
3.3V
390pF
390pF
5K
1K
1uF/50V
33K
1K
1nF
560
100
Limitación de corriente: Una protección muy común en los reguladores es el límite de corriente. Al limitar la corriente en la carga podemos evitar que el regulador se destruya al exceder su capacidad de corriente y de consumo de potencia. En el diagrama de bloques del LM723 se tiene ese tipo de protección: 210
Electrónica Analógica I 12
V+
11
Vc
7
13
FC
VZ2
6
5
Vref
13
Vout-10
4
4
+
VZ - 9
V7
CL - 2
CS - 3
Los terminales CL y CS permiten activar esta protección en el regulador. Cuando el voltaje VCL‐CS es igual a 0.6V, el transistor comienza a conducir y quita corriente de base al transistor de salida, impidiendo que su corriente exceda un límite prefijado. Entre CL y CS se pone una resistencia shunt de bajo valor, la cual detecta la corriente de carga. En los esquemas anteriores de las fuentes de 24V – 20 A y 25V – 6 A mostrados anteriormente, se ve el uso de esta protección. A continuación es mostrada la gráfica de respuesta típica en un regulador: VL
IL
ILmáx Icc
211
Electrónica Analógica I Icc es la corriente de cortocirciuito (con RL = 0). Vemos que al activarse la protección, la tensión de salida empieza a reducirse para evitar que la corriente suba excesivamente. El transistor regulador debe diseñarse para soportar la potencia que disipará con la corriente Icc. Limitación tipo foldback: Esta protección es una versión mejorada del límite de corriente. Hace que la corriente de cortocircuito sea menor que ILmáx. Esto permite que ante un cortocircuito el transistor regulador no disipe una potencia muy elevada. A continuación es mostrada la gráfica de respuesta típica de un regulador con este tipo de protección: VL
IL
Icc ILmáx
Protección contra corto circuito: Es otro tipo de protección en los reguladores que impide la circulación de corriente cuando se presenta un corto circuito en la salida. 212
Electrónica Analógica I Un ejemplo es el siguiente: R1
Q1
R3
VZ
POT
RL
Q2
FUENTE NO REGULADA
Salida
R2
R4
El transistor Q2 entrega corriente al transistor regulador Q1. Ante un cortocircuito en la salida, Q2 pasa a la zona de corte y deja de darle corriente a Q1, con lo que él también pasa a la zona de corte y ya no hay corriente de salida. Limitación de potencia: Esta protección consiste en detectar tanto la tensión como la corriente del transistor de potencia y conectarlas a un circuito multiplicador para obtener una señal proporcional a la potencia que disipa. Esta se compara con el nivel de referencia que establece la máxima potencia que debe disipar. Cuando se produce un exceso, el control lo obligará a disminuir su consumo de potencia. Es una protección costosa porque requiere el uso de componentes especiales para la protección. Protección crowbar: Este tipo de protección es usado para evitar que se prduzca una sobretensión en la salida que pueda dañar la carga. Esto puede producirse cuando se cruzan los transistores de potencia de salida. Un ejemplo es el siguiente: Regulador de 25V / 6 A 213
Electrónica Analógica I 0.1uF
MJ3000
0.1uF
0.2/5W
220
9
VZ
11
10
OUT
VC
VCC+
0.2/5W
10K
MJ3000
0.2/5W
-
GND
10
1K
7
VREF
0.2/5W
6
IN+
IN-
5
+
27V
LM723
4
2
CL
1nF
FRQCOMP
2.2/10W
CS
-
47K
3
VARISTOR
12
8A
13
+
30V
390pF
50pF
+ 20V
5.1K
1K
47K
Q3
SCR
1N4148
3.3V
3.3V
390pF
390pF
5K
1K
1uF/50V
33K
1K
1nF
560
100
Ante una falla de los transistores MJ3000, aparecerá una tensión mayor de 25V en la salida. Al superar los 30V, el zener de 30V conducirá y hará disparar al SCR Q3, el cual hará un cortocircuito a la entrada obligando a quemarse el fusible de 8 A, con o cual la fuente quedará desconectada. La resistencia en serie con el SCR se emplea para evitar que este dispositivo conduzca demasiada corriente y se destruya. Reguladores fijos con circuito integrado: Son reguladores lineales cuya salida no puede variarse. Son muy populares porque facilitan mucho el diseño de fuentes de alimentación. Hay modelos que entregan tensión positiva y otros que entregan tensión negativa. Se tienen 2 familias muy conocidas: La serie LM78xx es una familia de reguladores positivos. El número xx indica la tensión. Ejemplo: LM7812 = Regulador positivo de 12 voltios. La siguiente figura muestra un encapsulado típico con su disposición de pines: 214
Electrónica Analógica I Vemos que los terminales se numeran de izquierda a derecha. El encapsulado mostrado corresponde al código TO220. El terminal 1 (Input) es la entrada proveniente de la tensión rectificada y filtrada. El terminal 2 (Ground) es el de referencia (Tierra) el terminal 3 (Output) es la salida del voltaje regulado, respecto al de referencia. El terminal 2 está también conectado a la lámina metálica, la cual se emplea para montaje en un disipador. La serie LM79xx es una familia de reguladores negativos. Igualmente, el número xx indica la tensión. Ejemplo: LM7905 = Regulador negativo de ‐12 voltios. La siguiente figura muestra un encapsulado típico con su disposición de pines: En este caso vemos que los terminales se numeran empezando del pin marcado con el círculo, el cual indica al terminal 1. El encapsulado mostrado corresponde también al código TO220. El terminal 1 (Ground) es el de referencia (Tierra). El terminal 2 (Input) es la entrada proveniente de la tensión rectificada y filtrada. El terminal 3 (Output) es la salida del voltaje regulado, respecto al de referencia. El terminal 2 está también conectado a la lámina metálica, la cual se emplea para montaje en un disipador. 215
Electrónica Analógica I UNIDAD TEMÁTICA No. 7 RESPUESTA EN FRECUENCIA Hasta ahora hemos considerado que los parámetros de los transistores son constantes. Sin embargo, en la práctica, esto no es cierto. Dichos parámetros dependen de los puntos de operación, de la temperatura, de la frecuencia, etc. A la respuesta en frecuencia se le entiende como la respuesta en estado estacionario (régimen permanente) de un amplificador ante una entrada sinusoidal. Para el estudio del amplificador, se varía la frecuencia de la sinusoide de entrada dentro de un determinado rango de frecuencias y se obtiene la respuesta resultante. Este método nos permite hacer el análisis y diseño del circuito. Además es muy sencillo de realizar en el laboratorio, donde los instrumentos básicos que se necesitan son un generador sinusoidal de frecuencia variable y un osciloscopio. La teoría de control, junto con los modelos del transistor nos dan todas las herramientas necesarias para estudiar el comportamiento de los circuitos al variar la frecuencia. Actualmente, para un estudio más detallado, contamos con programas de cálculo (como MATLAB y MATHEMATICA) y de simulación (como SPICE, EMTP, CIRCUIT MAKER, WORKBENCH, SIMCAD, MULTISIM, etc.). MATLAB es un programa de cálculo, muy popular, basado en matrices, que además permite efectuar programaciones y cuenta con paquetes especializados. En el campo de los programas de descripción de hardware analógico y de simulación, los más populares son SPICE (Simulation Program with Integrated Circuits Emphasis), que es un programa de uso general orientado a circuitos y EMTP (Electro Magnetic Transients Program), desarrollado para la industria de Electrónica de Potencia. Los programas de simulación son muy útiles para analizar el comportamiento de un circuito y permiten tener un laboratorio virtual con el cual podemos hacer rápidos ajustes hasta lograr la respuesta deseada, para luego pasar a la prueba del circuito en el laboratorio. También nos sirven como herramienta de estudio pues podemos verificar nuestros cálculos teóricos y explorar lo que podría suceder sI se varían determinados parámetros. 217
Electrónica Analógica I Uno de los métodos más utilizados para estudiar la respuesta en frecuencia de un amplificador son los Diagramas de Bode (diagramas logarítmicos de la ganancia y la fase en función de la frecuencia). La frecuencia se representa en escala logarítmica y la fase y ganancia en escala decimal (en grados y decibeles, respectivamente). Al rango de frecuencias comprendida entre una frecuencia cualquiera f1 y 2f1 recibe el nombre de octava de frecuencias. Las pendientes de las rectas en este rango se expresan en db/octava. Al rango de frecuencias comprendida entre una frecuencia cualquiera f1 y 10f1 recibe el nombre de década de frecuencias. Las pendientes de las rectas en este rango se expresan en db/década. Una pendiente de 20 db/década es prácticamente equivalente a una pendiente de 6 db/octava. 5.1.‐ RESPUESTA EN FRECUENCIA DE LOS AMPLIFICADORES: La respuesta en frecuencia se refiere al comportamiento de los dispositivos y amplificadores al cambiar la frecuencia. En líneas generales, el estudio de los amplificadores en el dominio de la frecuencia (al excitar al amplificador con señales sinusoidales) se divide en tres partes: 1) RESPUESTA EN BAJA FRECUENCIA: Un amplificador puede variar su ganancia en frecuencias bajas (desde frecuencia 0 (ó DC) hasta una frecuencia fL) debido principalmente a las reactancias externas del circuito (por ejemplo, capacidades de acoplo y bypass). La frecuencia fL (ó wL) recibe el nombre de frecuencia de corte inferior. Aquí, para realizar el análisis, se utilizan los modelos de baja frecuencia del transistor junto con las reactancias externas de acoplo y bypass que, en este caso, no deben despreciarse. Una excepción es el amplificador operacional, que puede responder con su máxima ganancia desde DC. 2) RESPUESTA EN FRECUENCIAS MEDIAS: En esta región el amplificador actúa con su máxima ganancia y sus parámetros pueden considerarse como números reales. Aquí se utilizan los modelos de baja frecuencia del transistor. Las reactancias externas pequeñas pueden ser 218
Electrónica Analógica I consideradas como cortocircuitos y las reactancias grandes como circuitos abiertos. 3) RESPUESTA EN ALTA FRECUENCIA: En esta región el amplificador disminuye su ganancia al aumentar la frecuencia (desde el valor fH). La frecuencia fH (ó wH) recibe el nombre de frecuencia de corte superior. Este fenómeno se debe a las reactancias internas de los transistores. En general, el amplificador no puede aumentar o mantener constante su ganancia indefinidamente al aumentar la frecuencia. Siempre habrá alguna frecuencia alta a la cual la ganancia empieza a disminuir. Esto nos indica que siempre habrán más polos que ceros en su función de transferencia PUNTOS DE MEDIA POTENCIA Y ANCHO DE BANDA: Comúnmente las frecuencias fL (ó wL) y fH (ó wH), anteriormente mencionadas, se determinan en los puntos en que la señal de salida posee la mitad de la potencia que tiene en frecuencias medias. Cuando la ganancia se expresa en decibeles, los puntos de media potencia se determinan restando 3 db a la ganancia en frecuencias medias. El ancho de banda de un amplificador se define como la diferencia entre las frecuencias de corte superior y de corte inferior: BW = fH – fL (usando la frecuencia cíclica) ó BW (rad/s) = wH ‐ wL (usando la frecuencia angular) Hay casos en los cuales el ancho de banda se define con diferente criterio, como es el caso de los amplificadores de vídeo, donde se determina restando sólo 1 db a la ganancia en la región de frecuencias medias debido a que la vista puede detectar variaciones más pequeñas en los niveles de iluminación Actividad. Pasividad. Un transistor es pasivo cuando la potencia promedio total en pequeña señal que ingresa por todos sus puertos es cero o positiva. (Si es cero, el circuito no tiene pérdidas. Si es positivo, el circuito tiene pérdidas). En el caso contrario, el transistor es activo. 219
Electrónica Analógica I Modelo de parámetros π ‐ híbridos del transistor Este modelo de alta frecuencia y pequeña señal del transistor es muy usado porque sus parámetros se mantienen casi constantes con la frecuencia. Pueden ser usados hasta la frecuencia de corte alfa (fα) del transistor. A continuación se muestra el modelo: Cμ
ib
ic
rμ
rx
B
C
+
vbe
-
+
Vπ
-
rπ
Cπ
ro
gm Vπ
E
+
vce
E
rx = resistencia de dispersión de base rπ = resistencia de entrada rμ = resistencia de realimentación ro = resistencia de salida Cπ = capacidad de centrada Cμ = capacidad de realimentación Este modelo puede ser simplificado según la frecuencia de operación, teniendo en cuenta las redes en paralelo: rπ‐Cπ y rμ‐Cμ 1
rπ y la reactancia de Cπ son iguales a la frecuencia: f1 =
2πrπ Cπ
A frecuencias mucho menores que f1 se puede despreciar Cπ y sólo queda rπ A frecuencias mucho mayores que f1 se puede despreciar rπ y sólo queda Cπ 1
rμ y la reactancia de Cμ son iguales a la frecuencia: f 2 =
2πrμ C μ
220
Electrónica Analógica I A frecuencias mucho menores que f2 se puede despreciar Cμ y sólo queda rμ A frecuencias mucho mayores que f2 se puede despreciar rμ y sólo queda Cμ Comúnmente se cumple que: Cπ >> Cμ y rμ >> rπ >> rx Según los valores de estos parámetros, podremos simplificar más al circuito equivalente. A frecuencias de audio, el modelo puede reducirse a: B
+
Vπ
-
C
rπ
gm V π
E
E
Mediante estos parámetros podemos hallar la máxima frecuencia hasta la cual el transistor se comporta como dispositivo activo: 1
gm
f max =
2π 4rx Cπ C μ
A frecuencias mayores que fmáx, el transistor se comporta como dispositivo pasivo. RESPUESTA EN FRECUENCIA DEL TRANSISTOR. Los parámetros del transistor también varían con la frecuencia. Respuesta en frecuencia en emisor común: Aquí graficamos la magnitud asintótica de la ganancia, hfe, en db vs frecuencia: 221
Electrónica Analógica I h fe
db
h feo
0
fβ
fT
f
fβ = Frecuencia de corte β. Es la frecuencia del punto de media potencia de hfe. fT = Frecuencia de transición. Es la frecuencia a a cual la magnitud de hfe se hace igual á 1. También se le llama producto ganancia – ancho de banda. Producto ganancia‐ancho de banda. La frecuencia de transición (fT)es dada por: g
fT = m 2πCπ
Esta frecuencia también recibe el nombre de producto ganancia‐ancho de banda La ganancia de corriente en baja frecuencia es: h fe = g m rπ Frecuencias de corte. La frecuencia de corte β (fβ)es dada por: fβ =
fT
1
=
h fe 2πrπ Cπ
Respuesta en frecuencia en base común: Aquí graficamos la magnitud asintótica de la ganancia, hfe, en db vs frecuencia: α
db
αo
0
fα
222
f
Electrónica Analógica I fα = Frecuencia de corte α. Es la frecuencia del punto de media potencia de α. Su valor es muy cercano a fT. METODOS DE RESPUESTA EN FRECUENCIA Hay tres métodos de representación de funciones de transferencia sinusoidales, los cuales son: ‐ Diagramas de Bode (diagramas logarítmicos) ‐ Diagrama polar o de Nyquist ‐ Diagrama del logaritmo de la amplitud en función de la fase. DIAGRAMAS DE BODE: Son diagramas logarítmicos que representan la función de transferencia en el estado estacionario con excitación sinusoidal. Debido a que la función de transferencia en el dominio de la frecuencia y en estado estacionario con pequeña señal, es un número complejo, tendrá magnitud y fase, por lo general, ambas dependientes de la frecuencia. La magnitud se expresa en decibeles (db, que es la décima parte del Bel, una unidad de potencia sonora), la fase en grados sexagesimales; ambas se grafican en escala decimal y la frecuencia se representa en un eje logarítmico. El uso de los decibeles para la ganancia facilita la obtención de los diagramas de sistemas más complejos debido a que los productos se convierten en sumas y las divisiones en restas. Esto a su vez permite tener la representación de magnitud y fase de factores elementales para, en base a ellos, obtener las gráficas de sistemas más complejos. Por ese motivo estudiaremos primero los cuatro factores básicos que pueden intervenir en la función de transferencia: Factor ganancia (Ao): El factor ganancia es un número real. Cuando es expresado en db, será positivo si Ao es mayor que 1 y será negativo cuando Ao es menor que 1. Las ecuaciones para su diagrama de Bode son: La magnitud en db es: Ao(db) = 20log(Ao) Si tiene signo positivo, la fase será 0° y, si es negativo, la fase será 180°. Tanto la magnitud como la fase son constantes con la frecuencia. 223
Electrónica Analógica I F a c t o r G a n a n c ia
30
25
Ao(db)
20
15
10
5
0
10
-1
0
10
f (H z )
10
1
Factores integrales y derivativos: Son de la forma: G(jw) = 1/jw ó G(jw) = jw 1) Para el factor integral: La magnitud en db es: |G(jw)|db = 20log(1/w) = ‐20log(w) La fase es constante: Φ(jw) = ‐90° F a c t o r In t e g r a l
20
10
p e n d ie n t e = -2 0 d b / d e c
|G(jw)|db
0
-1 0
-2 0
-3 0
-4 0
-1
10
10
0
10
w ( fr e c u e n c i a a n g u l a r )
224
1
10
2
Electrónica Analógica I F a s e d e l F a c t o r In t e g r a l
-8 9
-8 9 .2
-8 9 .4
-8 9 .6
-8 9 .8
F a s e c o n s ta n te =
-9 0
- 9 0 g ra d o s
-9 0 .2
-9 0 .4
-9 0 .6
-9 0 .8
-9 1
1 0
-1
1 0
0
1 0
w
1
1 0
2
( fr e c u e n c i a a n g u l a r )
F a c t o r D e riva t ivo
4 0
3 0
p e n d ie n t e
2 0
|G(jw)|db
Para el factor derivativo: La magnitud en db es: |G(jw)|db = 20log(w) = 20log(w) La fase es constante: Φ(jw) = 90° =
+ 2 0 d b /d e c
1 0
0
-1 0
-2 0
1 0
-1
1 0
0
1 0
w
( fr e c u e n c ia
1
1 0
2
a n g u la r)
F a s e d e l F a c t o r D e r i va t i vo
91
9 0 .8
9 0 .6
9 0 .4
9 0 .2
Fase
2) F a s e c o n s t a n t e = 9 0 g ra d o s
90
8 9 .8
8 9 .6
8 9 .4
8 9 .2
89
10
-1
10
0
10
w ( fr e c u e n c i a a n g u l a r )
225
1
10
2
Electrónica Analógica I Factores de primer orden: Son de la forma: G(jw). = (1 + jwT) ó G(jw) = 1 / (1 + jwT) 1) Cero de primer orden: G(jw) = 1 + jwT La magnitud en db es: |G(jw)|db = 10log(1 + (wT)2) La fase es: Φ(jw) = arctan(wT) Estas gráficas se representan muchas veces por sus asíntotas, las que la describen en forma bastante aproximada, pudiéndose llegar con bastante precisión a la gráfica real haciendo algunas correcciones. Estas asíntotas se obtienen para wT << 1 y para wT >> 1: Para: wT << 1, la magnitud se aproxima a 0db; por lo tanto, la primera asíntota está representada por una recta horizontal en 0db. Para: wT >> 1, la magnitud se aproxima a 20log(wT); por lo tanto, la segunda asíntota será una recta con pendiente = 20 db/dec (similar al factor derivativo). Ambas asíntotas se encuentran en el punto wT = 1, completando la representación asintótica. El máximo error entre la representación real y la asintótica se presenta en wT = 1. En este caso el error es de: 3.03db. Este punto equivale al punto de media potencia. Una octava antes, el error es: 0.97db Una octava después el error también es: 0.97db Una década antes, el error es: 0.0432db Una década después el error también es: 0.0432db 226
C e ro
d e
P rim
e r
Electrónica Analógica I O
r d e n
4 5
4 0
3 5
p e n d ie n t e
=
+ 2 0 d b / d e c
|G(jw)|db
3 0
2 5
2 0
1 5
1 0
5
C u r v a
re a l
G
0
1 0
- 1
1 0
r a fic a
a s in t o t ic a
0
1 0
w ( fr e c u e n c ia
1
a n g u la r )
2) Polo de primer orden: G(jw) = 1/(1 + jwT) La magnitud en db es: |G(jw)|db = ‐10log(1 + (wT)2) La fase es: Φ(jw) = ‐arctan(wT) Estas gráficas también se representan sus asíntotas. Estas asíntotas se obtienen para wT << 1 y para wT >> 1: 1 0
2
Para: wT << 1, la magnitud se aproxima a 0db; por lo tanto, la primera asíntota está representada por una recta horizontal en 0db. Para: wT >> 1, la magnitud se aproxima a ‐20log(wT); por lo tanto, la segunda asíntota será una recta con pendiente = ‐20 db/dec (similar al factor integral). Ambas asíntotas se encuentran en el punto wT = 1, completando la representación asintótica. 227
Electrónica Analógica I El máximo error entre la representación real y la asintótica se presenta en wT = 1. En este caso, el error es de: ‐3.03db. Este punto equivale al punto de media potencia. Una octava antes, el error es: ‐0.97db Una octava después el error también es: ‐0.97db Una década antes, el error es: ‐0.0432db Una década después el error también es: ‐0.0432db P o lo d e P rim e r O rd e n
0
G r á fi c a a s i n t ó t i c a
C u rva re a l
-5
-1 0
|G(jw)|db
-1 5
-2 0
-2 5
-3 0
-3 5
-4 0
10
-2
10
-1
0
w
10
( fr e c u e n c i a a n g u l a r )
10
1
10
2
228
Electrónica Analógica I A continuación damos la tabla con los factores de corrección para magnitud y fase: wT 0.1 0.5 1 2 10 |G(jw)|db +/‐ 0.0432 +/‐ 0.97 +/‐ 3.03 +/‐ 0.97 +/‐ 0.0432 Fase +/‐ 5.7° +/‐ 26.6° +/‐ 45° +/‐ 63.4° +/‐ 84.3° Factores cuadráticos: Son de la forma: G(jw). = [1 + 2ζ(jw/wn) + (jw/wn)2] ó G(jw) = 1 / [1 + 2ζ(jw/wn) + (jw/wn)2] wn recibe el nombre de frecuencia natural ζ recibe el nombre de factor de amortiguamiento Estos factores tienen 3 tipos de respuesta: Cuando ζ > 1, la respuesta es sobre amortiguada y las raíces son reales. Cuando ζ = 1, la respuesta es críticamente amortiguada y las raíces son reales e iguales. Cuando 0 < ζ > 1, la respuesta es sub amortiguada y las raíces son complejas y conjugadas. La respuesta con que actúe depende de los valores de ζ y wn; éstos a su vez dependen de los valores de los componentes del amplificador. 1) Ceros de segundo orden: G(jw) = [1 + 2ζ(jw/wn) + (jw/wn)2] La magnitud en db es: |G(jw)|db = 10log{[1 – (w/wn)2]2 + (2ζw/wn)2)} Φ(jw) = arctan{(2ζw/wn)/[1 – (w/wn)2]} La fase es: B o d e
D ia g ra m
s
M a g n it u d
4 0
P e n d ie n t e = 4 0 d b / d e c
F a c t o r
0
d e
a m
o r t ig u a c ió n
=
0 . 1
- 2 0
w / w n
2 0 0
( fr e c u e n c ia
a n g u la r
n o rm
a liz a d a )
( fr e c u e n c ia a n g u la r n o r m
F r e q u e n c y
(r a d / s e c )
a liz a d a )
1 5 0
Fase
Phase (deg); Magnitude (dB)
2 0
F a c t o r
1 0 0
d e
a m
o rt ig u a c ió n
=
0 . 1
5 0
0
1 0
-1
1 0
w / w n
229
0
1 0
1
Electrónica Analógica I B o d e D ia g ra m s
M a g n itu d
50
P e n d ie n t e = 4 0 d b / d e c
40
20
10
F a c t o r d e a t e n u a c ió n = 1
0
200
w / w n (fre c u e n c ia a n g u la r n o rm a liz a d a )
150
Fase
Phase (deg); Magnitude (dB)
30
100
F a c t o r d e a t e n u a c ió n = 1
50
0
1 0 -1
100
101
w / w n (fre c u e n c ia a n g u la r n o rm a liz a d a )
F re q u e n c y (ra d / s e c )
B o d e D ia g ra m s
M a g n itu d
100
P e n d ie n t e = 4 0 d b / d e c
80
40
F a c t o r d e a t e n u a c ió n = 5
20
0
200
w / w n (fre c u e n c ia a n g u la r n o rm a liz a d a )
150
Fase
Phase (deg); Magnitude (dB)
60
100
F a c t o r d e a t e n u a c ió n = 5
50
0
1 0 -2
1 0 -1
100
101
102
w / w n (fre c u e n c ia a n g u la r n o rm a liz a d a )
F re q u e n c y (ra d / s e c )
Observando las gráficas de cada caso, podemos decir que: Cuando el sistema es sub amortiguado, aparece un pico de resonancia en el cual la ganancia disminuye, la pendiente en esa región es más pronunciada (más selectiva), llegando a una pendiente de 40db/década para frecuencias altas. 230
Electrónica Analógica I Cuando el sistema es críticamente amortiguado, ya no hay pico de resonancia, la pendiente en esa región es menos pronunciada, llegando a una pendiente de 40db/década para frecuencias altas. Cuando el sistema es sobre amortiguado, tampoco hay pico de resonancia, la pendiente inicial es la más baja (la menos selectiva), subiendo a 40db/década para frecuencias altas. Podemos observar también que los ceros aumentan la magnitud (o ganancia) al elevar la frecuencia. 2) Para: G(jw) = 1/[1 + 2ζ(jw/wn) + (jw/wn)2] La magnitud en db es: |G(jw)|db = ‐10log{[1 – (w/wn)2]2 + (2ζw/wn)2)} Φ(jw) = ‐arctan{(2ζw/wn)/[1 – (w/wn)2]} La fase es: Observando las gráficas siguientes de cada caso, podemos decir que: Cuando el sistema es sub amortiguado, aparece un pico de resonancia en el cual la ganancia aumenta, la pendiente en esa región es más inclinada (más selectiva), llegando a una pendiente de ‐40db/década para frecuencias altas. El pico de resonancia se presenta a la frecuencia de resonancia ω r = ω n 1 − 2ξ 2
Podemos observar que ωr existe sólo para valores de: 0 < ξ < 0.707 1
El valor del pico de resonancia es dado por: M r =
2 1−ξ 2
válido para valores de la relación de amortiguación (ξ): 0 < ξ < 0.707 Para valores de: ξ > 0.707 entonces: Mr = 1 Para valores de ξ que se acercan a cero : Mr = tiende a infinito Cuando el sistema es críticamente amortiguado, ya no hay pico de resonancia, la pendiente en esa región es menos pronunciada, llegando a una pendiente de ‐40db/década para frecuencias altas. 231
Electrónica Analógica I Cuando el sistema es sobre amortiguado, tampoco hay pico de resonancia, la pendiente inicial es la más baja (la menos selectiva), cayendo a ‐
40db/década para frecuencias altas. Podemos observar también que los polos disminuyen la magnitud (o ganancia) al elevar la frecuencia. B o d e
P o lo s
D ia g ra m s
d e S e g u n d o O rd e n
2 0
F a c to r d e
a t e e n u a c ió n = 0 . 1
-2 0
P e n d ie n t e
-4 0
w /w n
0
( fr e c u e n c i a
=
-4 0
d b /d e c
a n g u la r n o rm a liz a d a )
-5 0
Fase
Phase (deg); Magnitude (dB)
0
F a c to r d e
-1 0 0
a t e e n u a c ió n = 0 . 1
-1 5 0
-2 0 0
1 0
-1
1 0
w /w n
0
1 0
1
( fr e c u e n c i a a n g u l a r n o r m a l i z a d a )
F re q u e n c y (ra d /s e c )
B o d e
P o lo s
D ia g ra m
d e
s
S e g u n d o
O r d e n
0
F a c t o r
d e
a t e n u a c ió n
=
1
- 2 0
- 3 0
P e n d ie n t e
- 4 0
w / w n
0
( fr e c u e n c ia
a n g u la r
=
-4 0
n o rm
a liz a d a )
( fr e c u e n c ia a n g u la r n o r m
F re q u e n c y (ra d / s e c )
a liz a d a )
d b / d e c
- 5 0
Fase
Phase (deg); Magnitude (dB)
- 1 0
F a c t o r
- 1 0 0
d e
a t e n u a c ió n
=
1
- 1 5 0
- 2 0 0
1 0
-1
1 0
w / w n
232
0
1 0
1
Electrónica Analógica I B o d e D ia g ra m s
P o lo s d e S e g u n d o O r d e n
0
-20
F a c t o r d e a t e n u a c ió n = 5
-60
-80
P e n d ie n t e = -4 0 d b / d e c
-100
w / w n ( fr e c u e n c i a a n g u l a r n o r m a l i z a d a )
0
-50
Fase
Phase (deg); Magnitude (dB)
-40
-100
F a c t o r d e a t e n u a c ió n = 5
-150
-200
1 0 -2
1 0 -1
100
101
102
w / w n ( fr e c u e n c i a a n g u l a r n o r m a l i z a d a )
F re q u e n c y (ra d / s e c )
RESPUESTA EN BAJA FRECUENCIA Estudiaremos el caso de un amplificador en emisor común como el mostrado a continuación: +VCC
R1
RC
C2
C1
Q
RL
Vg
R2
RE
+
Vo
-
CE
Para estudiar la respuesta en baja frecuencia hallaremos la función de transferencia (ganancia de tensión) considerando sólo las capacidades externas y asumiremos que las capacidades internas del transistor son circuitos abiertos a estas frecuencias. A continuación representamos al circuito con su modelo para señal: 233
Electrónica Analógica I C2
C1
Q
Rb
Vg
RC
RE
RL
+
Vo
-
CE
Rb = R1//R2 A continuación reemplazamos al transistor por su modelo simplificado para pequeña señal y baja frecuencia. Vemos que en este caso las capacidades de desacoplo y bypass no se desprecian. C2
C1
ib
hie
Vg
hfe ib
Rb
RC
RE
RL
CE
Planteamos las ecuaciones de Kirchoff para obtener la función de transferencia: En el circuito de salida: (h fe RC RL C2 s )(ib )
Vo = −
1 + (RC + RL )C 2 s
En el circuito de entrada: (Rb C1 s )(1 + RE C E s )
ib
=
V g (1 + h fe RE )(1 + Rb C1 s ) + (1 + RE C E s )(1 + Rb C1 s )hie + (1 + RE C E s )Rb
234
+
Vo
-
Electrónica Analógica I Finalmente: ⎛ h fe RC RLC2 ⎞ 2
⎟⎟ s (1 + RE CE s)
− ⎜⎜
h
R
C
Vo (s)
⎝ ie E E ⎠
Av (s) =
=
Vg (s)
⎡ 2 ⎛ 1
1 + h fe ⎞ ⎡ Rb + hie + (1 + h fe )RE ⎤⎤
1
1
⎟⎟ + ⎢
[1 + (RL + RC )s]⎢s + s⎜⎜
+
+
+
⎥⎥
⎢⎣
⎝ RE CE hieC1 RbC1 hieCE ⎠ ⎣ hie Rb R E C1C2 ⎦⎥⎦
( )
Hacer el cálculo manual de una función como la mostrada (o de otras más complejas) es un trabajo largo y tedioso. Sin embargo, podemos observar la función de transferencia y sacar algunas conclusiones que nos permitan obtener una idea de la forma de la respuesta en baja frecuencia con cálculos más sencillos aunque aproximados. Observamos que esta función de transferencia tiene 3 ceros: ‐ Dos en el origen: s = 0 y ‐ Uno en: s = ‐1/ RECE Podemos decir que el cero producido por CE se obtiene multiplicándolo por la resistencia que tiene en paralelo. Este producto es la constante de tiempo en el emisor. Observamos también que la función de transferencia en baja frecuencia tiene 3 polos: - Uno en: s = ‐1/(RC+ RL)C2 En este caso podemos decir que el polo de salida se obtiene con la resistencia que ``ve´´ C2 cuando los demás condensadores se comportan como cortocircuitos y no hay señal de entrada. - Los otros dos polos corresponden a un factor de segundo orden. Sin embargo, si queremos que estos polos sean reales, podemos aplicar el criterio anterior para determinar aproximadamente los otros dos polos: Podemos hallar aproximadamente el polo introducido por C1 determinando la resistencia que ``ve´´ dicho condensador cuando los demás se comportan como cortocircuito (o circuito abierto, según la frecuencia empleada) y no hay señal de entrada: 235
Electrónica Analógica I Según esto, la resistencia que ``ve´´ C1 es: Rb//hie Luego, el polo aproximado producido por C1 es: s =
−1
C1 (Rb // hie )
Al polo introducido por CE también podemos determinarlo aproximadamente mediante la resistencia que ``ve´´ dicho condensador cuando los demás se comportan como cortocircuito y no hay señal de entrada: ⎛ h ⎞
Según esto, la resistencia que ``ve´´ CE es: R E // ⎜ ie ⎟ = RE // hib ⎜1+ h ⎟
fe ⎠
⎝
1
Luego, el polo aproximado producido por CE es: s = −
⎛ hie ⎞
⎟
C E RE // ⎜
⎜1+ h ⎟
fe
⎝
⎠
Donde hib es la resistencia de entrada del transistor en base común. Supongamos ahora que a la función de transferencia anterior podemos factorizarla y expresarla en la forma siguiente: ⎛
s ⎞
Ao (s 2 )⎜⎜1 + ⎟⎟
zE ⎠
V (s )
⎝
Av (s ) = o
=−
Vi (s )
⎛
s ⎞⎛
s ⎞⎛
s ⎞
⎜⎜1 + ⎟⎟⎜⎜1 +
⎟⎜1 +
⎟
p1 ⎠⎝
p E ⎟⎠⎜⎝
p 2 ⎟⎠
⎝
p p p
Multiplicando el numerador y el denominador por: 1 E3 2 y desarrollando s
Obtenemos en el estado estacionario: Av (s ) =
Vo (s )
=
Vi (s )
⎛
1 + ⎜⎜
⎝
⎛ 1
1
− Ao ⎜⎜
+
jw
z
E
⎝
⎛ 1 ⎞
1 ⎞
⎟⎟( p1 + p2 + p E ) + ⎜⎜ 2 ⎟⎟( p1 p2
jw ⎠
⎝ jw ⎠
⎞
⎟⎟ p1 p 2 p E
⎠
⎛ 1 ⎞
+ p1 p E + p 2 p E ) + ⎜⎜ 3 ⎟⎟ p1 p 2 p E
⎝ jw ⎠
Si queremos determinar la frecuencia de corte inferior (wL), debemos notar que, por lo general, p1, p2 y pE serán menores que wL; entonces, a frecuencias cercanas a wL los términos cuadráticos y cúbicos serán más chicos que el término con 1/jw. 236
Electrónica Analógica I Cumpliéndose lo anterior, podremos afirmar que la frecuencia de corte inferior puede ser hallada aproximadamente por la expresión: ω L = p1 + p 2 + p E A su vez, p1, p2, y pE se pueden hallar bajo el criterio anterior, determinando la resistencia que ``ve´´ cada condensador cuando los demás se comportan como cortocircuito y la señal de entrada se hace cero. PROBLEMA 7.1: En el circuito mostrado, determine el polo y el cero introducido por C1 cuando C2 y CE se comportan como cortocircuito +VCC
R1
RC
C2
C1
Q
RL
Vg
R2
+
Vo
-
RE
CE
El modelo para señal, con las condiciones dadas, es el siguiente C1
ib
hie
Rb
Vg
hfe ib
RC
Vo = − h fe (RC // RL )ib ib =
Finalmente: Av (s ) =
(C1 s )(Rb // hie )Vg
hie (1 + (Rb // hie )C1 s )
Vo (s ) (− h fe )(RC // RL )(Rb // hie )(C1 s )
=
V g (s )
hie (1 + (Rb // hie )C1 s )
237
RL
+
Vo
-
Electrónica Analógica I Podemos ver que aparece un cero en el origen y un polo en: s =
−1
(Rb // hie )C1
Rb//hie es justamente la resistencia que ``ve´´ C1 cuando los demás condensadores se comportan como cortocircuito y no hay señal de entrada. PROBLEMA 7.2: Repita el problema anterior hallando el polo y el cero introducido por CE cuando C1 y C2 se comportan como cortocircuito El modelo para señal en este caso es el mostrado en el siguiente gráfico. Igualmente: Vo = − h fe (RC // RL )ib Además: ib =
Vg
⎛
hie + (1 + h fe )⎜⎜ RE
⎝
⎛ 1 ⎞⎞
⎟⎟ ⎟
// ⎜⎜
⎟
⎝ CE s ⎠⎠
=
(1 + RE C E s )Vg
hie + (1 + h fe )RE + hie RE C E s
Finalmente: ib
hie
hfe ib
Rb
Vg
RC
RE
238
+
Vo
-
CE
Vo (s ) (− h fe )(RC // RL )(1 + R E C E s )
=
V g (s ) hie + (1 + h fe )RE + hie RE C E s
−1
Vemos que hay un cero en: s =
RE C E
− (hie + (1 + h fe )RE )
−1
s=
Y un polo en: =
(hib // RE )C E
hie RE C E
Av (s ) =
RL
Electrónica Analógica I Igualmente, podemos decir que el polo se obtiene por medio de la resistencia que ``ve´´ CE cuando los demás condensadores se comportan como cortocircuito y no hay señal de entrada. Podemos darnos cuenta fácilmente de ello si usamos el modelo de base común para el transistor. Lo anterior también nos da un método de diseño para obtener los valores de los condensadores de acoplo y bypass. PROBLEMA 7.3: En el circuito mostrado, determine C1, C2 y CE si se quiere una ganancia igual a 100 en frecuencias medias y una frecuencia de corte inferior de 100 Hz. RC
2K
Rg
1K
R1
10K
C2
C1
Q
2N2222
12Vdc
Vg
R2
3k
RE
820
CE
RL
10K
Como CE es el capacitor que “ve” la menor resistencia, haremos que sea él el que determine la frecuencia de corte inferior (100 Hz). Para que los otros dos polos no afecten apreciablemente, haremos que actúen una década antes (10 Hz). Bajo estas condiciones, cuando actúan C1 y C2, CE aún no actúa y podemos hacer el siguiente modelo para pequeña señal: 239
Electrónica Analógica I C2
Rg
1K
Vg
C1
Q
2N2222
Rb
2.3k
RE
820
RC
2K
RL
10K
La resistencia que “ve” C1 es: RC1 = Rg + Rb// [hie + (1 + hfe)RE] Considerando para el transistor: hfe = 80 y hie = 1.3K, empleando el modelo simplificado: Reemplazando valores: RC1 = 2.22K Entonces: C1 = 1 / 2π(10)(2.22K) = 7.15 uF Podemos elegir el valor comercial superior más próximo: C1 = 10 uF La resistencia que “ve” C2 es: RC2 = RC + RL = 12 K Entonces: C2 = 1 / 2π(10)(12K) = 1.33 uF Podemos elegir el valor comercial superior más próximo: C2 = 2.2 uF A la frecuencia que actúa CE, C1 y C2 ya han actuado y podemos considerar que se comportan como cortocircuitos. Bajo estas condiciones, podemos hacer el siguiente modelo para pequeña señal: 240
Rg
1K
Electrónica Analógica I Q
2N2222
Rb
2.3k
Vg
RC
2K
RE
820
RL
10K
CE
La resistencia que “ve” CE es: RCE = RE // [hib + (Rb // Rg)/(1 + hfe)] Reemplazando valores y efectuando: RCE = 820 // [49.3] = 46.5 Entonces: CE = 1 / 2π(100)(46.5) = 34.2 uF Podemos elegir el valor comercial superior más próximo: CE = 39 uF Con estos valores podemos hacer una simulación de la respuesta en frecuencia: CALCULO DE LA RESPUESTA EN FRECUENCIA USANDO MATLAB: Usaremos como ejemplo el caso de un filtro activo pasa bajo como el siguiente: R
10K
7
+ 12 V
LM741
6
+
Vs
-
4
3
+
2
10K
-
R
R1
5.6K
Vi
C
0.1uF
C
0.1uF
241
- 12 V
R1
5.6K
Electrónica Analógica I La función de transferencia, obtenida considerando características ideales del OPAMP para simplificar la expresión es la siguiente: AV (s) = [2 (1 + 2 R1 C s)]/ [1 + R1 C s + R1 C s2] Reemplazando los valores de los componentes obtenemos: AV (s) = [2 + 0.00224 s)]/ [1 + 0.00056 s + 0.0000003136 s2] Con la función de transferencia ya determinada, ingresamos al programa MATLAB Cuando aparece el prompt (>>)de MATLAB escribimos: >>num=[0 0.00224 2] <enter> >>den=[0.0000003136 0.00056 1] <enter> >>bode(num,den) <enter> >>title(‘Respuesta en Frecuencia del Filtro Activo Pasabajo’) <enter> La respuesta en frecuencia empleando un simulador nos da la gráfica siguiente: A: u1_6
4.500 V
3.500 V
2.500 V
1.500 V
0.500 V
-0.500 V
0.000 Hz
200.0 Hz
400.0 Hz
600.0 Hz
800.0 Hz
DISEÑO DE FILTROS ACTIVOS MEDIANTE AMPLIFICADORES OPERACIONALES Entre los tipos de filtros tenemos: - Filtro pasa bajo: Dejan pasar las frecuencias que están por debajo de un determinado valor (fL) - Filtro pasa alto: Dejan pasar las frecuencias que están por encima de un determinado valor (fH) - Filtro pasa banda: Dejan pasar las frecuencias que están entre un rango de valores (fL y fH) - Filtro de rechazo de banda (Notch): Rechazan las frecuencias que estén entre un rango de valores (fL y fH) 242
-
Electrónica Analógica I Filtro pasa todo (desfasador): Dejan pasar todas las frecuencias, pero producen desfasaje. Se les emplea como desfasador. La función de transferencia de un filtro pasa bajo tiene la forma siguiente: H(s) = N(s) / D(s) N(s) y D(s) son polinomios en s Hay muchas familias de filtros pasa bajos. Cada filtro de una familia posee una función de transferencia única. La localización y complejidad de los polos y ceros de la función de transferencia definen por completo la respuesta del filtro. La mayor parte de los requisitos que debe cumplir un filtro se satisfacen eligiendo cualquiera de las siguientes familias: 1) Butterworth: Sus polos caen dentro de una circunferencia de radio 1 dentro del plano complejo. El filtro pasa bajo no tiene ceros. Poseen características transitorias relativamente buenas. Su respuesta en frecuencia es bastante plana y su atenuación es con pendiente relativamente acentuada. Se pueden diseñar con componentes de valores prácticos con tolerancias poco críticas 2) Chebyshev: Presentan una pendiente de atenuación más aguda que el Butterworth, pero, su respuesta no es plana y presenta rizado; además su respuesta transitoria no es tan buena como los Butterworth. El filtro pasa bajo no tiene ceros. La mayor amplitud del rizo hace que la atenuación sea más aguda, pero su respuesta a los transitorios empeora. Sus polos se localizan en una elipse en el plano complejo. 3) Bessel: Se emplean para la reproducción fiel de la onda de entrada. Ofrecen, para ello, un retardo constante en la banda pasante. El filtro pasa bajo no tiene ceros. Su respuesta en frecuencia no es tan buena como los de las familias anteriores, pero sus excelentes propiedades transitorias lo hacen muy útil. 4) Función elíptica: Su función de transferencia posee polos y ceros; esto permite que su pendiente de atenuación sea incluso más aguda que la de la familia Chebyshev, pero presenta rizado tanto en la banda pasante como en la rechazada. Sus circuitos son más complejos, pero requieren menos secciones para una atenuación dada. Para facilitar el diseño se emplean filtros normalizados. Por ejemplo, para un filtro normalizado Butterworth de segundo orden (n = 2) es: 2
H(s) = 1 / [s + 1.414 s + 1] 243
Electrónica Analógica I Los polos son: s1 = ‐ 0.707 + j(0.707) y s2 = ‐ 0.707 ‐ j(0.707) La atenuación es siempre 3 db á 1 rad/s, excepto en los elípticos en los que la atenuación a 1 rad/s es igual al rizado de la banda pasante. Cuando se conoce la respuesta en frecuencia que debe tener el filtro, se le debe normalizar para compararlo con las curvas de respuesta normalizadas de los filtros, para seleccionar el tipo. Los valores del filtro escogido deberán desnormalizarse para el intervalo de frecuencias de operación. Este proceso puede requerir transformaciones si el requisito central no es sólo el filtro pasa bajo. Para el diseño se tienen gráficos y tablas normalizados para cada familia, las que permiten calcular los componentes para la topología seleccionada PROBLEMA 7.4: Diseñe un filtro activo pasa bajo de segundo orden, tipo Bessel, con ganancia unitaria y frecuencia de corte de 100Hz. C1
+
R
+
Vi
-
R
-
V1
C2
+
VL
-
Solución: Planteamos las ecuaciones de nudo mediante la transformada de La place considerando el operacional ideal: (Vi – V1) / R = (V1 – VL)C1s + (V1 – VL) / R Luego: Vi = V1 (2 + RC1s) – (1 + RC1s)VL Además: (VL – V1) / R + VL C2s = 0 Luego: VL (1 + RC2s) = V1 Mediante estas ecuaciones hallamos la función de transferencia: 244
Electrónica Analógica I 1 H(s) = ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ R2C1C2s2 + 2RC2s + 1 De las tablas para diseño de filtros tipo Bessel de segundo orden, normalizados, obtenemos: Polos: ‐1.1030 ± j 0.6368 Las capacidades normalizadas son: C1 = 0.9060 C2 = 0.68 La frecuencia angular de corte es: wc = 2πfc = 628 rad/s Elegimos un valor arbitrario de R: R = 43KΩ Hallamos los valores reales de C1 y C2, de manera que se aproximen a valores comerciales: 0.9060 0.68 C1 = ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ = 33.55nF C2 = ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ = 25.18nF (628)(43K) (628)(43K) La atenuación a 500Hz será 20.4db PROBLEMA 7.5: Diseñe un filtro activo pasa bajo de segundo orden, tipo Bessel, con ganancia igual a 2 y frecuencia de corte de 100Hz. C
R
R
R1
+
Vi
-
+
R2
-
V1
C
+
VL
-
Solución: De las tablas para diseño de filtros tipo Bessel de segundo orden, normalizados, obtenemos: 245
Electrónica Analógica I Polos: α ±j β = ‐1.1030 ± j 0.6368 Elegimos un valor arbitrario de la capacidad, de valor comercial: C = 27nF La frecuencia de corte es: fc = 100Hz Luego: 1 α R1 = ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ = 26.67KΩ R2 = ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ = 80.16KΩ 4πfc α C π fc C (α2 + β2) ACOPLO CON TRANSFORMADORES EN BANDA ANCHA: En el siguiente gráfico mostramos un transformador con dos arrollamientos. Si utilizamos la transformada de La Place obtenemos las ecuaciones que describen su funcionamiento. En ellas estamos despreciando las resistencias de los devanados. V1 = sL p I 1 + sMI 2
V2 = sMI 1 + sLs I 2
En consecuencia, todo circuito que tenga las mismas ecuaciones del transformador podrá ser reemplazado por él, sin que varíen las tensiones ni corrientes. Además se cumple que: M = k L p Ls k = Factor de acoplo En forma análoga, utilizando transformadores ideales podemos obtener circuitos que cumplan con las ecuaciones mostradas y todos ellos serán modelos del transformador Uno de sus modelos más utilizados se muestra en la figura siguiente: 246
rp
Ldp
Electrónica Analógica I rs
n:1
Lm
IDEAL
rp = resistencia del primario
rs = resistencia del secundario
Ldp = Inductancia de dispersión del primario
Lm = Inductancia de magnetización
n = relación de transformación
Puede expresarse: Ldp = (1 – k2)Lp ; Lm = k2Lp y n = k(Lp/Ls)1/2 Cuando el factor de acoplo se acerca a la unidad, se puede hacer la siguiente aproximación: n = (Lp/Ls)1/2 Consideremos el caso siguiente, en el cual no tomaremos en cuenta otros efectos de segundo orden que se presentan en el transformador, tales como las no linealidades del núcleo y la capacidad de los arrollamientos, como se muestra en la figura siguiente: Rg
rp
Ldp
rs
n:1
Vg
Lm
RL
+
Vo
-
ideal
Rg = resistencia de la fuente de señal de entrada RL = resistencia de carga 247
Electrónica Analógica I Podemos obtener la función de transferencia: ⎛ nRL ⎞
⎜
⎟s
⎜
⎟
L
V o (s )
dp ⎠
⎝
=
H (s ) =
Vi (s )
⎛ R p Rs
⎞ R p Rs
R
2
s
⎟+
+
+
s + s⎜
⎜L
⎟ L L
L
L
m
dp ⎠
dp m
⎝ dp
Donde: Rp = Rg + rp y Rs = n2(RL + rs) Observamos que: •
Al bajar la frecuencia, la función de transferencia disminuye debido a que Ldp y Lm tienden a comportarse como corto circuitos. •
Al elevar la frecuencia, la función de transferencia también disminuye debido a que Ldp y Lm tienden a comportarse como circuito abierto. •
La función de transferencia tendrá un valor alto sólo en la región de frecuencias medias; en ella, Ldp tenderá a comportarse como corto circuito y Lm como circuito abierto. En la región de frecuencias medias, la función de transferencia se convierte en: R g + rp (nR L )
V (s )
=
H (s ) = o
Vi (s ) R g + rp + n 2 (R L + rs )
Derivando H(s) respecto de n, e igualando a cero, podemos obtener el valor de n R g + rp
que hace máxima a H(s): nm =
RL + rs
Reemplazando en H(s) obtenemos: Hm =
RL
2 (R g + rp )(RL + rs )
Lo anterior quiere decir que si queremos que la tensión de salida sea máxima en la carga, debemos hacer que la relación de transformación sea dada por la ecuación de nm. 248
Electrónica Analógica I Las resistencias rp y rs de los devanados disminuyen la eficiencia del transformador. El caso ideal se tiene cuando rp y rs valen cero y podemos definir una eficiencia del transformador (ηT) comparándolo con el caso ideal: ηT =
PL
PLideal Donde: ⎛ V g2 ⎞⎛
⎞
RL2
⎟⎜
⎟
PL = ⎜
⎜ 2 RL ⎟⎜ 4(R g + rp )(R L + rs ) ⎟
⎠
⎠⎝
⎝
y
V g2
PLideal =
8Rg
Reemplazando: ηT =
PL ⎛⎜ Rg ⎞⎟⎛ RL ⎞
⎜
⎟
=
PLideal ⎜⎝ Rg + rp ⎟⎠⎜⎝ RL + rs ⎟⎠ De la expresión anterior concluimos que: Para elevar la eficiencia debe cumplirse: Rg >> rp y RL >> rs Comúnmente, los fabricantes de transformadores de audio indican los valores de Rg y RL necesarios para que se cumpla esta condición y, con la ecuación anterior podemos hallar la relación de transformación. La ecuación de H(s) nos muestra que hay un cero en el origen y dos polos. Dependiendo de los valores de los parámetros, estos polos pueden ser reales o complejos: p1 = ‐ (0.5)[Rp/Ldp + Rs/Lm + Rs/Ldp] + 0.5[(Rp/Ldp + Rs/Lm + Rs/Ldp)2 ‐ 4 RpRs/LdpLm]1/2 p2 = ‐ (0.5)[Rp/Ldp + Rs/Lm + Rs/Ldp] ‐ 0.5[(Rp/Ldp + Rs/Lm + Rs/Ldp)2 ‐ 4 RpRs/LdpLm]1/2 Sin embargo, en los transformadores de banda ancha se cumple: Lm >> Ldp 249
Electrónica Analógica I Debido a ello, los polos estarán muy alejados uno del otro y podremos obtener expresiones aproximadas para ellos: − (R p + Rs )
p1 =
Ldp
− (R p // Rs )
p2 =
Lm
Si se cumple: Rp = Rs y Lm > 10Ldp Entonces los valores aproximados de los polos tienen un error dentro del 5% Si se cumple Lm > 100Ldp, el error baja al 1% para cualquier relación entre Rp y Rs REDES LINEALES DE SEGUNDO ORDEN Este tipo de redes poseen dos elementos reactivos y responden a la siguiente ecuación diferencial: d2y/dt2 +2 α dy/dt + ωo2 y = f(t) La solución para t > 0 es de la forma: p1t
y(t ) = A1 e + A2 ep2t + yss(t) Los términos: A1 ep1t + A2 ep2t constituyen la solución homogénea, llamada también respuesta natural o estado transitorio. Si los coeficientes p1 y p2 de los exponentes (denominados polos) son negativos, las exponenciales serán decrecientes y después de un tiempo habrán desaparecido, quedando sólo yss(t). Todo sistema estable debe tener un estado transitorio que desaparezca con el tiempo. En caso contrario, si p1 y p2 son positivos, el estado transitorio nunca desaparecerá sino que se incrementará permanentemente con el paso del tiempo y el sistema será inestable El término: yss(t) constituye la solución particular, llamada también solución forzada o estado estacionario. Este término siempre tiende a ser del mismo tipo que f(t). Si f(t) es de forma sinusoidal, yss(t) también tenderá a ser sinusoidal; Si f(t) es de forma triangular, yss(t) también tenderá a ser triangular, etc. Todo sistema estable debe siempre llegar al estado estacionario después de un determinado tiempo. 250
Electrónica Analógica I La estado transitorio puede llegar a tener, en este caso, varias formas, dependiendo de los valores de α y ωo. Se denomina: α = factor de amortiguación ωo = frecuencia natural Se definen: Q = factor de calidad = ωo/2α ξ = relación de amortiguación = α/ωo BW = ancho de banda = 2α p1 = ‐ α + (α2 ‐ ωo2) ½ Además: p2 = ‐ α ‐ (α2 ‐ ωo2) ½ Cuando: 1.
α > ωo se tiene estado transitorio sobre amortiguado En este caso, si la red sólo tiene energía almacenada y f(t) = 0, la solución toma la forma: y(t ) = A1 ep1t + A2 ep2t En el caso que f(t) sea continua: f(t) = B, la solución toma la forma: y(t ) = A1 ep1t + A2 ep2t + B 2.
α = ωo se tiene estado transitorio críticamente amortiguado En este caso, si la red sólo tiene energía almacenada y f(t) = 0, la solución toma la forma: y(t ) = e‐αt (A1 + A2 t) En el caso que f(t) sea continua: f(t) = B, la solución toma la forma: y(t ) = e‐αt (A1 + A2 t) + B 3.
α < ωo se tiene estado transitorio sub amortiguado En este caso, si la red sólo tiene energía almacenada y f(t) = 0, la solución toma la forma: y(t ) = A e‐αt cos(ωd t + φ) Donde: ωd = (ωo2‐ α2) ½ ωd es la frecuencia amortiguada En el caso que f(t) sea continua: f(t) = B, la solución toma la forma: y(t ) = A e‐αt cos(ωd t + φ) + B 251
Electrónica Analógica I CIRCUITO R‐L‐C PARALELO Este circuito se muestra en la figura 5.29 y podemos aplicar los conceptos anteriores para entender el circuito: I(t)
R
C
L
+
Vo
-
Aplicando el método de tensiones de nodo podemos hallar la ecuación diferencial para el voltaje Vo: d2Vo/dt2 + (1/RC)dVo/dt + (1/LC)Vo = (1/C)dI/dt Esta ecuación se compara con la correspondiente a los sistemas lineales de segundo orden y obtenemos: α = 1/2RC ωo = (1/LC)1/2 Q = ωoRC = R (C/L)1/2 Los polos resultantes en el dominio de la frecuencia resultan ser: p1 = ‐ α + [α2 ‐ ω2o]1/2 = ‐ α + j α[4Q2 ‐ 1]1/2 p2 = ‐ α ‐ [α2 ‐ ω2o]1/2 = ‐ α ‐ j α[4Q2 ‐ 1]1/2 Podemos ver que para un valor de Q de 5 ó más, los polos se pueden aproximar con las expresiones: p1 = ‐ α + j ωo p2 = ‐ α ‐ j ωo CIRCUITO L‐C Y BOBINA CON PERDIDAS Este circuito se muestra en la figura 5.30. Las pérdidas de la bobina se representan mediante una resistencia, r, en serie con ella: 252
Electrónica Analógica I L
I(t)
C
r
+
Vo
-
Obteniendo la ecuación diferencial: Aplicando el método de tensiones de nodo podemos hallar la ecuación diferencial para el voltaje Vo: d2Vo/dt2 ‐ (r/L)dVo/dt + (1/LC)Vo = (r/LC)I + (1/C)dI/dt Esta ecuación se compara con la correspondiente a los sistemas lineales de segundo orden y obtenemos: α = r/2L ωo = (1/LC)1/2 Q = ωoL/r = (1/r)(L/C)1/2 La resistencia en serie puede ser representada mediante una resistencia en paralelo si tomamos en cuenta que la impedancia de la bobina a la frecuencia ωo es: ZL = r + j ωoL Su admitancia será: YL = 1/(r + j ωo L) = r/(r2 + (ωoL)2) ‐ j ωoL/(r2 + (ωoL) 2) La parte real corresponde a una resistencia equivalente en paralelo cuyo valor es: Req = (r2 + (ωoL)2)/r = (1 + Q2) r Para: Q > 10 se puede aproximar: Req = Q2 r Y podemos usar un circuito equivalente, como se muestra en la figura 5.31: 253
Electrónica Analógica I L
I(t)
I(t)
C
r
+
Vo
-
L
Req
C
+
Vo
-
CIRCUITO L‐C Y CONDENSADOR CON PERDIDAS Este circuito se muestra en la figura siguiente. Las pérdidas de la bobina se representan mediante una resistencia, rc, en serie con ella: +
C
I(t)
Vo
L
r
-
Obteniendo la ecuación diferencial: Aplicando el método de tensiones de nodo podemos hallar la ecuación diferencial para el voltaje Vo: d2Vo/dt2 ‐ (r/L)dVo/dt + (1/LC)Vo = (r/LC)I + (1/C)dI/dt Esta ecuación se compara con la correspondiente a los sistemas lineales de segundo orden y obtenemos: α = r/2L ωo = (1/LC)1/2 Q = ωoL/r = (1/r)(L/C)1/2 254
Electrónica Analógica I La resistencia en serie puede ser representada mediante una resistencia en paralelo si tomamos en cuenta que la impedancia de la bobina a la frecuencia ωo es: ZL = r + j ωoL Su admitancia será: YL = 1/(r + j ωo L) = r/(r2 + (ωoL)2) ‐ j ωoL/(r2 + (ωoL) 2) La parte real corresponde a una resistencia equivalente en paralelo cuyo valor es: Req = (r2 + (ωoL)2)/r = (1 + Q2) r Para: Q > 10 se puede aproximar: Req = Q2 r Y podemos usar un circuito equivalente, como se muestra en la figura 5.31: L
I(t)
I(t)
+
Vo
-
C
r
L
Req
+
Vo
-
C
CONTROL DE GRAVES Y AGUDOS A continuación se muestra un circuito de control de tonos para audio. Este control de tonos tiene dos potenciómetros que permiten ajustar la presencia de graves y agudos en una señal de audio. 100K
2
+
10K
1
-
NE5532
22K
1K5
20K
100K
56nF
10K
56nF
10nF
10nF
100pF
22K
10K
2K2
6
5
+
2K2
-
10uF / 16v / NP
4K7
2K2
7
NE5532
+
3
50K
2.2uF
10K
255
Electrónica Analógica I Se utiliza un circuito integrado de altas prestaciones para audio que contiene en su pastilla dos amplificadores operacionales. Se trata del NE5532, el cual se alimenta con +/‐ 15V. El potenciómetro de 50K a la entrada establece el nivel de entrada o sensibilidad del sistema. El preset de 20K primeramente debe situarse al centro de su cursor. Si se presentasen distorsión o deformaciones en el audio disminuir éste hasta lograr una reproducción fiel. El potenciómetro de 100K ajusta la cantidad de graves, mientras que el de 10K hace lo mismo con los agudos. Como la alimentación es simétrica por el terminal 4 del integrado (Marcado GND en la imagen de arriba) debe ir a ‐15V mientras que el terminal 8 (Marcado como Vcc) debe ir a +15V. La masa debe cablearse a 0V, que en integrado no se conecta mas que a la entrada no inversora del segundo operacional (terminal 5). SERIE DE PROBLEMAS PROBLEMA 1: Un circuito paralelo R‐L‐C, como el mostrado, se usa como filtro pasa‐banda. 2
Z(jw)
R
C
L
1
256
a) b) c) Electrónica Analógica I Halle la expresión de su impedancia en función de la frecuencia. Si: R = 10k, C = 10nf y L = 100µh, determine su impedancia a las frecuencias de: 50KHz, 100KHz, 160KHz, 200KHz y 250 KHz Haga los diagramas de la magnitud de la impedancia y de la fase en función de la frecuencia y determine su ancho de banda. PROBLEMA 2: Un circuito serie R‐L‐C, como el mostrado, se usa como filtro pasa‐
banda. 2
R
Z(jw)
a) b) c) C
L
1 Halle la expresión de su impedancia en función de la frecuencia. Si R = 10k, C = 10nf y L = 100µh, determine su impedancia a las frecuencias de: 50KHz, 100KHz, 160KHz, 200KHz y 250 khz Haga los diagramas de la magnitud de la impedancia y de la fase en función de la frecuencia y determine su ancho de banda. PROBLEMA 3: En el transformador mostrado en la figura 5.28, halle: a) El valor de Ls necesario para acoplar una carga de 8Ω a una cuente con 3200Ω en el rango de frecuencias medias... b) Determine ωL y ωH para este caso c) La eficiencia del transformador PROBLEMA 4: Se van a transmitir 24 canales telefónicos con anchos de banda individuales de 300 a 3500 hz. a) Si estos canales se transmiten como banda lateral única en multiplex por distribución de frecuencia, ¿cuál es el ancho de banda requerido si se asigna 4 khz a cada canal? b) ¿Cuál seria el ancho de banda si se transmitiera en AM normal? PROBLEMA 5: En el circuito del problema 4, halle el voltaje total de salida en el drenador del FET Asuma: L = 4 µH, C = 2500 pF, R = 2K, ωo = 10 ** (‐7) y ωm = 10 ** (‐5) Los parámetros del FET son los mismos. 257
Electrónica Analógica I PROBLEMA 6: Un amplificador tiene la siguiente ganancia de voltaje: Av(s) = (100 s) / [(1 + s/100)(1 + s/1000)] a) Trace las gráficas de Bode de magnitud y fase en función de la frecuencia. b) Determine el margen de ganancia, el margen de fase y la frecuencia de transición cuando la ganancia se hace igual a 1. PROBLEMA 7: En el circuito mostrado, halle la corriente total de drenador. El circuito tanque está sintonizado a la frecuencia wo. ¿Cual debe ser la frecuencia wm para que el tanque sólo deje pasar el rango de frecuencias wo +/‐ wm? 2
R
2K
C
+10V
L
2uH
2.5nF
1
C2
+
Q1
JF1033B
10 uF
Idss = 4 mA
Vp = -4V
1M
cos(wo t)
2V
+
cos(wm t)
PROBLEMA 8: En el siguiente circuito, , mediante el análisis en el dominio de la frecuencia, determine: a) La frecuencia de corte inferior (fL) b) La frecuencia de corte superior (fH) c) El ancho de banda d) La ganancia en frecuencias medias +
Vs
-
Rs
C1
1K
20 pF
+
Vi
-
Ri
25K
Ci
gm Vi
20 pF
gm = 15 mA/V
258
Ro
10K
Co
10 pF
RL
10 K
+
Vo
-
Electrónica Analógica I PROBLEMA 9: Determine los Diagramas de Bode de la ganancia de bucle de un amplificador realimentado, si es dada por: T (jw) = 2 / (1 + jw)3 Determine también el margen de fase y el margen de ganancia. PROBLEMA 10: Dibuje los Diagramas de Bode asintóticos para la función de transferencia: 10
H (s ) =
s ⎞⎛
s ⎞⎛
s ⎞
⎛
⎜1 + ⎟⎜1 +
⎟⎜1 +
⎟
⎝ 25 ⎠⎝ 2500 ⎠⎝ 200000 ⎠
PROBLEMA 11: Diseñe un amplificador en emisor común , como el mostrado, con ganancia en frecuencias medias comprendida entre: 40 ≤ |Ao| ≤ 50 Frecuencia de corte inferior: fL ≤ 1 KHz VCC
R1
Rs
RC
C2
C1
Q
2N2222
Vs
R2
RE1
RE2
RL
2K
+
Vo
-
CE
Utilice el transistor 2N2222 ( silicio, β = 100, VT = 26 mV, ICQ = 2 mA, VCEQ = 5 V) VCC = 12 Vdc 259
Electrónica Analógica I PROBLEMA 12: Diseñe un amplificador de drenaje común, como el mostrado, para obtener una impedancia de entrada en frecuencias medias: Zi ≥ 1 MΩ, una frecuencia de corte inferior: fL ≤ 1 KHz y una frecuencia de corte superior: fH = 50 KHz Datos del MOSFET: Cds = 1 pF, Cgs = 10 pF, Cgd = 10 pF, ro = 50 KΩ, gm = 20 mA/V, Para el punto de operación: IDQ = 2 mA, VGSQ = 6V y VDSQ = 10 V 15 V
R1
C4
Rg
Q
C2
1K
CAP NP
R2
Vg
RL
1K
Rs
PROBLEMA 13: Determine la respuesta en frecuencia del siguiente circuito. Asuma que el OPAMP se comporta en forma ideal 56.44K
U7
7
56.44 K
+ 15V
3
1 Vpico
C1
47 nF
C2
47 nF
2
uA741
R3
28.22K
-
OS2
OUT
OS1
5
6
1
4
Vs
+
V+
R2
V-
R1
C3
CAP NP
RL
100K
- 15 V
260
Electrónica Analógica I PROBLEMA 14: En el circuito mostrado halle las frecuencias de corte superior e inferior. gm = 0.002 s
rds = 50K
Cgs = 2 pF
Cds = 2 pF
Cgd = 0
VCC
10K
1uF
1uF
+
1M
Vi
1k
RL
+
10K
Vo
-
100uF
-
PROBLEMA 15: Calcule los condensadores de acoplo y by pass en el siguiente circuito, empleando la técnica del polo dominante. Se requiere una frecuencia de corte inferior de 100 Hz. Dadas las capacidades internas del MOSFET, determine la frecuencia de corte superior usando el teorema de Miller. + 12 V
10 M
1M
3K
Co
C3
+
Q1
10 K
+
Vi
Vo
-
5M
1K
gm = 0.002 s
rds = 100K
Cgs = 2 pF
Cgd = 3 pF
Cs
-
261
Electrónica Analógica I PROBLEMA 16: Un cristal, empleado en un oscilador sinusoidal tiene un circuito equivalente tal como se muestra a continuación: Ls
2 MHz
A
B
Cs
Rs
A
CRISTAL
B
Co
Si sus parámetros son: Rs = 100Ω, Cs = 0.014pF Ls = 0.45H Co = 4Pf a) Halle la impedancia que ofrece entre los terminales A y B, emplendo la transformada de Laplace b) Halle la gráfica asintótica de amplitud de Bode. c) ¿Qué ancho de banda tiene el cristal?. 262
Electrónica Analógica I BIBLIOGRAFIA 1) 2) 3) 4) Clsarke, Kenneth – Hess T., Donald; Communication Circuits: Analysis and Design; 1ra. edición; Addison‐Wesley Publishing Company; 1971; 658p. Ogata, Katsuhiko; Ingeniería de Control Moderna; 1ra. edición; Prentice – Hall Hispanoamérica S. A.; Ogata, Katsuhiko; Problemas de Ingeniería de Control Utilizando Matlab; 1ra. edición; Prentice – Hall Hispanoamérica S. A.; Williams, Arthur B.; Manual de Circuitos Integrados: Selección, Diseño y Aplicaciones; Libro 1; 1ra. edición; Mc Graw Hill; Mexico; 1992; 172p. 263