Cálculo y análisis de los parámetros eléctricos de un
Anuncio

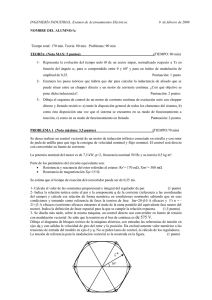
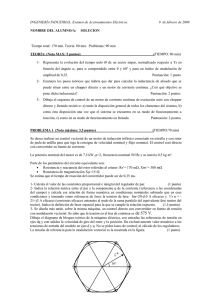
Cálculo y análisis de los parámetros eléctricos de un conjunto de motores de inducción TITULACIÓN: Grado de ingeniería eléctrica AUTOR: Bartomeu Angulo Salonen DIRECTOR: Luis Guasch Pesquer FECHA: Septiembre / 2013 I. Índice de Figuras Figura 1 Estátor de un motor asíncrono [9] ................................................................. 8 Figura 2 Rotor en jaula de ardilla [10] ......................................................................... 9 Figura 3 Esquema simplificado por fase de la máquina de inducción trifásica ......... 10 Figura 4 Desarrollo del circuito equivalente.............................................................. 11 Figura 5 Circuito equivalente reducido al estátor ...................................................... 11 Figura 6 Circuito equivalente de un modelo de jaula sencilla de la máquina de inducción trifásica ...................................................................................................... 12 Figura 7 Tensión EsFL del circuito equivalente .......................................................... 15 Figura 8 Representación puntos de operación facilitados por el fabricante [3]......... 17 Figura 9 Representación datos experimentales [3] .................................................... 18 Figura 10 Circuito equivalente despreciando Rc ....................................................... 20 Figura 11 Circuito equivalente Thevenin................................................................... 21 Figura 12 Puntos de funcionamiento utilizados por el fabricante y puntos calculados a partir de los parámetros estimados .......................................................................... 23 Figura 13 Posibles puntos nominales......................................................................... 24 Figura 14 Curva par-velocidad motor asíncrono [8].................................................. 25 Figura 15 Puntos de funcionamiento utilizados por el fabricante vs. calculados a partir de los parámetros estimados............................................................................. 26 Figura 16 Errores en el punto nominal....................................................................... 26 Figura 17 Circuito equivalente motor asíncrono........................................................ 39 2 II. Índice de Gráficas Gráfica 1 Distribución motores por número de polos................................................ 27 Gráfica 2 Distribución motores por frecuencias ........................................................ 28 Gráfica 3 Distribución por marcas ............................................................................. 28 Gráfica 4 Distribución por potencias ......................................................................... 29 Gráfica 5 Distribución por potencias <50kW ............................................................ 29 Gráfica 6 Errores Tmax, Tarranque, Tn (n=cte) / Logaritmo de la potencia ............. 30 Gráfica 7 Errores Tmax, Tarranque, Vel. nominal (T=cte) / Logaritmo potencia..... 31 Gráfica 8 Error Par arranque / Logaritmo de la potencia........................................... 31 Gráfica 9 Frecuencia error Par arranque .................................................................... 32 Gráfica 10 Error Par máximo / Logaritmo de la potencia.......................................... 33 Gráfica 11 Frecuencia error Par máximo ................................................................... 33 Gráfica 12 Error Velocidad nominal / Logaritmo de la potencia............................... 34 Gráfica 13 Frecuencia error Velocidad nominal........................................................ 34 Gráfica 14 Error Intensidad arranque y nominal........................................................ 35 Gráfica 15 Error Intensidad arranque / Logaritmo potencia ...................................... 36 Gráfica 16 Frecuencia Error Intensidad arranque ..................................................... 36 Gráfica 17 Error Intensidad nominal / Logaritmo potencia ...................................... 37 Gráfica 18 Frecuencia Error Intensidad nominal ....................................................... 37 Gráfica 19 R rotor / Log Par arranque ....................................................................... 40 Gráfica 20 R rotor / Log Par máximo ........................................................................ 40 Gráfica 21 R rotor / Log Par nominal ........................................................................ 41 Gráfica 22 Frecuencias logaritmo par nominal.......................................................... 41 Gráfica 23 R1 / Log. Potencia .................................................................................... 42 Gráfica 24 R1 (valores < 5) / Log. Potencia ............................................................... 42 Gráfica 25 R’2 / Log. Potencia ................................................................................... 43 Gráfica 26 X1 / Potencia............................................................................................. 43 Gráfica 27 X2 / Potencia............................................................................................. 44 Gráfica 28 Xm / Potencia........................................................................................... 44 3 Índice General I. Índice de Figuras ................................................................................................... 2 II. Índice de Gráficas.............................................................................................. 3 Índice General .............................................................................................................. 4 1. Introducción ............................................................................................................. 6 2 1.1 Objetivo ......................................................................................................... 6 1.2 Antecedentes.................................................................................................. 6 1.3 Alcance .......................................................................................................... 7 1.4 Estructura del trabajo..................................................................................... 7 Modelo de la Máquina de Inducción Trifásica en Régimen Permanente.............. 8 2.1 3 Método de Estimación de Parámetros para la Máquina de Inducción Trifásica . 14 3.1 4 5 6 Modelo de Jaula Sencilla............................................................................... 8 Determinación de parámetros NEMA de diseño del motor de inducción a partir de datos del fabricante........................................................................ 14 Datos de Partida para la Estimación de Parámetros ............................................ 17 4.1 Introducción................................................................................................. 17 4.2 Origen de los Datos ..................................................................................... 17 4.3 Técnicas para la Estimación a partir de Datos de Catálogo ........................ 18 4.4 Características de los Datos de Catálogo Utilizados ................................... 19 4.5 Estimación de Parámetros en los Motores Seleccionados........................... 20 Análisis de Error de la Simulación del Comportamiento del Motor a partir de los Parámetros Estimados.......................................................................................... 25 5.1 Introducción................................................................................................. 25 5.2 Metodología de Trabajo............................................................................... 25 5.3 Características de la muestra escogida ........................................................ 27 5.4 Errores Calculados....................................................................................... 30 Estudio Longitudinal del Valor de los Parámetros Estimados ............................ 39 6.1 Introducción................................................................................................. 39 4 7 6.2 Resistencia rotor vs Par ............................................................................... 40 6.3 Parámetros vs Potencia................................................................................ 42 Conclusiones........................................................................................................ 46 Referencias................................................................................................................. 47 8 Anexos ................................................................................................................. 48 8.1 Listado de Símbolos Principales ................................................................. 48 8.2 El sistema por unidad .................................................................................. 48 5 1. Introducción Las máquinas de inducción trifásicas, en la actualidad, son de las máquinas eléctricas más usadas: desde bombas centrifugas, compresores, vehículos eléctricos, generación de energía eléctrica, elevadores y cintas transportadoras entre otros. Debido a este amplio uso de las máquinas de inducción se requiere que se conozcan sus características y se obtengan modelos más estrictos que representen el comportamiento de la máquina en sus diferentes zonas de funcionamiento. Existen varias técnicas de estimación de parámetros de dichos modelos, esto es debido a que no existe una única técnica que permita determinar que los parámetros se ajustan a todos los puntos de funcionamiento. Los propios fabricantes nos proporcionan una serie de datos de alta fiabilidad, por tanto a partir de estos datos se podrían obtener los diferentes parámetros. Aún así faltaría averiguar si la técnica de estimación es fiable para todos los puntos de funcionamiento. En este trabajo se va a utilizar una estimación de los parámetros eléctricos de la máquina de inducción trifásica ya existente y observará su precisión comparando con los datos suministrados por el fabricante. 1.1 Objetivo El principal objetivo de este trabajo es analizar los parámetros eléctricos de motores de inducción obtenidos a través de los datos del fabricante. Además del principal objetivo, otros objetivos son: 1.2 - Seleccionar una técnica de estimación de parámetros eléctricos. - Estimar los parámetros eléctricos del conjunto de motores a estudiar a partir de los datos del fabricante. - Analizar longitudinalmente y representar los parámetros obtenidos. - Analizar la relación entre los parámetros y otras variables del motor. Antecedentes Este trabajo parte de la necesidad de conocer cuanto fiable es un método para la estimación de parámetros eléctricos. La estimación de parámetros es un aspecto importante para conocer mejor el funcionamiento del motor. El fabricante nos proporciona una serie de datos (potencia, voltaje, longitud del motor…) muy precisos, pero por otro lado los parámetros del circuito equivalente no los proporciona. En este trabajo se parte del estudio previo de diferentes métodos para la estimación de parámetros en máquinas de inducción ya existentes, además de una extensa base de datos proporcionada por el proyecto final de carrera: “Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de se peso y altura de eje” septiembre de 2011, realizado por el señor Manuel Cereijo Neira, la cual ha sido mejorada y modificada para adecuarse al presente trabajo. [1] 6 1.3 Alcance En este trabajo el estudio se va a realizar para un conjunto de motores de inducción trifásica en jaula de ardilla que se supone van a trabajar en puntos de funcionamiento cercanos al punto de funcionamiento nominal. El circuito equivalente del motor de inducción se va a suponer de jaula sencilla porque es el modelo sencillo que presenta un buen ajuste en puntos de funcionamiento cercanos al nominal. No se va a realizar un nuevo método para la estimación de parámetros, se va a partir de un método ya existente. La muestra de las máquinas en las cuales se basa el proyecto tiene las características siguientes: 1.4 - Cantidad de máquinas: 2.206 máquinas de inducción trifásicas con rotor de jaula de ardilla. - Margen de potencias: 0,05 a 1.000 kW - Frecuencias: 50 y 60 Hz - Velocidades de sincronismo: 750 a 3.600 rpm - Numero de polos: 2, 4, 6 y 8 - Fabricantes: ABB, Siemens, Rossi, Leroy Somer, CMG, WEG y Marelli Estructura del trabajo Este trabajo se ha divido en 8 apartados. En el primer capítulo se ha realizado una pequeña introducción, explicando de qué trata el trabajo y cuáles son sus objetivos. En el segundo capítulo se realizará una pequeña explicación del motor sobre el cual trata el trabajo, una definición del circuito equivalente del motor y del proceso para calcular los diferentes parámetros. El capítulo 3 tratará de explicar un método para la estimación de los parámetros del circuito equivalente del motor asíncrono de jaula de ardilla. El siguiente capítulo enumerará los datos de partida que suministran los fabricantes de motores, y cómo a partir de estos datos se calcularán los parámetros previamente explicados, indicándose claramente que fórmulas y procedimientos se utilizarán. Además se explicará cómo se analizará la fiabilidad del método de estimación seleccionado. En el quinto capitulo se realizará el análisis del error de los parámetros calculados. Para ello, en un principio se explicará la metodología de trabajo, se mostrarán gráficas para observar que cantidad y tipo de motores han sido objeto del trabajo y seguidamente se mostrará la manera de calcular los errores. Finalmente se mostrarán los errores obtenidos. El capitulo 6 realizará un estudio longitudinal de los parámetros estimados, comparando estos con el par y con la potencia nominal. Con ello se podrá observar si existe una relación entre los parámetros y la potencia o el par. Finalmente el capitulo 7 mostrará las conclusiones finales del trabajo. 7 2 Modelo de la Máquina de Inducción Trifásica en Régimen Permanente Existen varias máquinas eléctricas rotativas con una constitución muy diferente entre ellas. Este trabajo se ha centrado en las máquinas de inducción trifásica de jaula de ardilla ya que son las más utilizadas dentro del mundo de las máquinas eléctricas rotativas, un 80% de los motores eléctricos [2]. Esto es debido a que estas máquinas tienen una construcción simple y robusta, sobre todo en el caso del rotor de jaula de ardilla, además de tener un excelente servicio en condiciones adversas y un mantenimiento mínimo. En este capítulo se analiza la máquina de inducción trifásica en régimen permanente así como el circuito equivalente de ésta. Mediante el circuito equivalente es posible conocer el comportamiento de la máquina, para ello es necesario conocer los parámetros que los componen. 2.1 Modelo de Jaula Sencilla Las máquinas de inducción trifásica pueden dividirse en dos grupos dependiendo del tipo de construcción del rotor: rotor en jaula de ardilla o rotor con anillos rozantes. En este trabajo se va a trabajar con el de jaula de ardilla debido a su sencillez y mayoría de usos. El circuito equivalente de una máquina de inducción trifásica tiene como objetivo simular el comportamiento eléctrico y mecánico ante diferentes condiciones de funcionamiento. Figura 1 Estátor de un motor asíncrono [9] En una máquina de inducción trifásica el devanado del estátor (figura 1) esta constituido por tres arrollamientos desfasados 120º en el espacio y de 2p polos. Al circular una corriente de una red trifásica con una determinada frecuencia f, se produce una onda rotativa de fuerza magnetomotriz (f.m.m) distribuida de forma sinusoidal por el entrehierro, produciendo ésta un campo magnético giratorio cuya velocidad viene expresada por la ecuación 2.1. Esta velocidad se le denomina velocidad de sincronismo. n1 = 60 ⋅ f p (2.1) Este campo magnético giratorio producido por el estátor inducirá unas fuerzas electromotrices (f.e.m.s) en las barras de la jaula de ardilla del rotor. Los extremos de estas 8 barras están unidas mediante unos anillos (figura 2), lo cual provocará unas corrientes en las barras que reaccionarán con el flujo del estátor. Debido a la f.e.m inducida en las barras, se generan unas corrientes a través de las barras. Entonces, debido a las corrientes, aparecen en las barras unas fuerzas (Ley de Laplace) que generan un par que hace girar sobre si al rotor. Figura 2 Rotor en jaula de ardilla [10] Cuanto más se aproxima la velocidad del rotor a la velocidad a la velocidad n1 del campo magnético giratorio, las f.e.m.s inducidas en los conductores del rotor se reducen debido a que disminuye la velocidad relativa entre el campo magnético giratorio y el rotor. En consecuencia, también se verán reducidas las corrientes en el rotor, y en consecuencia el par interno (fuerzas). Por ello si el motor girará a la velocidad de sincronismo el par electromagnético del rotor sería nulo. Por ello se dice de estas máquinas que son asíncronas, ya que deben trabajar con una velocidad menor a la velocidad de sincronismo. La velocidad del motor se denomina con la letra n. A partir de la relación de estas dos velocidades se obtiene el valor del deslizamiento, el cual se expresa con la letra s. s= n1 − n n1 (2.2) Las frecuencias de las corrientes del rotor están relacionadas con la frecuencia del estátor por medio de la expresión [2]: f 2 = s ⋅ f1 (2.3) Los subíndices 1 indican magnitudes referidas al estátor y los subíndices 2 se refieren al rotor. Para el caso dónde el rotor está en reposo, por tanto la velocidad será igual a cero (s=1); y por tanto se obtiene mediante la ecuación 2.3 que la frecuencia del estátor es igual a la del rotor (f1=f2). Si se denomina E2 al valor eficaz de la f.e.m por fase del rotor, N2 al número de espiras por fase, Φm al flujo máximo que lo atraviesa y K2 al coeficiente del devanado, se cumplirá de acuerdo con [2]: E 2 = 4,44 ⋅ K 2 ⋅ f 1 ⋅ N 2 ⋅ Φ m (2.4) De forma similar se denomina E1 al valor eficaz de la f.e.m inducida por fase en el estátor, N1 el número de espiras por fase y K1 el factor de devanado correspondiente se obtiene: 9 E1 = 4,44 ⋅ K 1 ⋅ f 1 ⋅ N 1 ⋅ Φ m (2.5) Los valores de K1 y K2 son unos coeficientes de devanado que representan factores reductores (muy cercanos a la unidad) para tener en cuenta que la f.e.m.s de las diferentes espiras del devanado, al estar distribuido en ranuras por las periferias del estátor. En el caso del que el rotor gire a una velocidad n, en el sentido campo giratorio. El deslizamiento ya no es igual a la unidad y la igualdad de frecuencias ya no se cumple y por tanto las frecuencias de las corrientes del rotor son iguales a la frecuencia del rotor (f2). Lo cual se denomina a la nueva f.e.m inducida en este devanado como: E2 s = 4,44 ⋅ K 2 ⋅ f 2 ⋅ N 2 ⋅ Φ m (2.6) Comparando las ecuaciones 2.4 y 2.6 se puede obtener la relación 7, que relaciona las f.e.m.s según si se considera si esta en movimiento (E2s) o parado (E2) E2s = s ⋅ E2 (2.7) Para crear las ecuaciones del comportamiento eléctrico del estátor y rotor, se deberá tener en cuenta la resistencia de los arrollamientos R1 y R2 y además los flujos de dispersión en los devanados tanto del estátor como del rotor que dan lugar a las autoinducciones Ld1 y Ld2. Por tanto, las reactancias de los arrollamientos cuando la pulsación de la red es w1 (parado) serán: X 1 = Ld 1 ⋅ w1 = Ld 1 ⋅ 2 ⋅ π ⋅ f 1 (2.8) X 2 = Ld 2 ⋅ w1 = Ld 2 ⋅ 2 ⋅ π ⋅ f 1 (2.9) En cambio, en el caso en que el motor esté girando, la frecuencia secundaria cambia dando lugar a la reactancia X2s, que en función de X2 es: X 2 s = Ld 2 ⋅ w2 = Ld 2 ⋅ 2 ⋅ π ⋅ f 2 = s ⋅ X 2 (2.10) En la figura 3 se muestra un esquema simplificado por fase del motor en el que se muestran los parámetros anteriores. Siendo V1 la tensión con la que se alimenta el primario. La f.m.m secundaría genera un efecto desmagnetízate respecto a la f.m.m primaria (ya que la corriente I1 entra un punto y la corriente I2 sale por punto). Figura 3 Esquema simplificado por fase de la máquina de inducción trifásica Las ecuaciones eléctricas correspondientes se obtienen aplicando la 2ª ley de Kirchhoff a las mallas del primario y del secundario; debe tenerse en cuenta que las frecuencias de ambos circuitos son diferentes y de valores f1 y f2 respectivamente. V1 = E1 + R1 ⋅ I 1 + j ⋅ X 1 ⋅ I 1 (2.11) E 2 s = R2 ⋅ I 2 + j ⋅ X 2 s ⋅ I 2 (2.12) 10 Despejando el valor de I2 se obtiene: I2 = E2s R2 + j ⋅ X 2 s (2.13) Teniendo en cuenta las ecuaciones 2.7 y 2.10 aplicadas sobre la ecuación 2.13 se puede llegar a la siguiente ecuación: I2 = E2 R2 + j⋅ X2 s (2.14) En la ecuación 2.14 la cual nos define la intensidad I2, tiene los parámetros de f.e.m (E2) y reactancia (X2) que están referidos a la frecuencia f1 del estátor. Resumiendo la ecuación 2.14 nos describe el comportamiento de un rotor el cual su parámetro de resistencia (R2) varía según la velocidad que tenga el rotor, manteniéndose constantes lo valores de E2 y X2 a cualquier velocidad. En la figura 4 se muestra como quedaría el circuito después de aplicar la ecuación 2.14. Figura 4 Desarrollo del circuito equivalente El circuito de la figura 4 todavía no muestra las ventajas analíticas de un circuito eléctrico, ya que existen acoplamientos magnéticos. Es preciso reducir el rotor al estátor, para ello se realiza igual que el caso de los transformadores pero algo más complejo debido a la influencia de factores de devanado y a que en general los números de fases del estátor y rotor no coinciden. En la figura 5 se muestra un circuito equivalente con los parámetros tanto del estátor (primario) como del rotor (secundario) además de los factores de devanado. Figura 5 Circuito equivalente reducido al estátor 11 Los nuevos parámetros del rotor serán los siguientes: - La fuerza electromotriz E’2: E '2 = K1 ⋅ N1 = mv ⋅ E 2 K2 ⋅ N2 (2.15) Siendo mv la relación de transformación de tensiones. - La corriente I’2: Como ambos lados de la figura 5 deberá tener la misma potencia rotórica se obtiene: m2 ⋅ E2 ⋅ I 2 = m1 ⋅ E '2 ⋅I ' 2 (2.16) Teniendo en cuenta la ecuación 2.15 dará lugar a: I '2 = I2 mi (2.17) Siendo mi la relación de transformación de corrientes mi = m1 ⋅ mv m2 (2.18) - Impedancias R’2, X’2, R’c: También se tiene que en ambos lados debe aplicarse el principio de igualdad energética, lo cual nos da que: m2 ⋅ R2 ⋅ I 22 = m1 ⋅ R ' 2 ⋅I ' 22 (2.19) Teniendo en cuenta las ecuaciones 2.17 y 2.18 se obtendrá R ' 2 = mv ⋅ mi ⋅ R2 (2.20) X ' 2 = mv ⋅ mi ⋅ X 2 (2.21) de forma análoga se obtiene En este caso se denomina como la relación de transformación de impedancias al producto de mv y mi. Por tanto, teniendo en cuenta los valores transformados del nuevo rotor, se podrán unir los terminales A-A’ y los a-a’. En la figura 6 se ha dibujado el nuevo esquema con la rama en paralelo por la que se derivará la corriente de vacío del motor, la cual se divide en dos componentes, una activa IFe y otra reactiva Ic [2]. Lo cual nos da el esquema del circuito equivalente del motor asíncrono. Figura 6 Circuito equivalente de un modelo de jaula sencilla de la máquina de inducción trifásica 12 Resumiendo, en este capitulo se ha demostrado como se obtiene el esquema del circuito equivalente que se va a usar en este trabajo, el cual es el que se muestra en la figura 6. Los parámetros que se van a estimar son: - R1, resistencia del estátor. - R2’, resistencia del rotor. - X1, reactancia del estátor. - X2’, reactancia del rotor. - Xm, reactancia de acoplamiento - La resistencia de carga (Rc) al tener un valor muy elevado, se ha decidido despreciarla y no tenerla en cuenta en los cálculos. 13 3 Método de Estimación de Parámetros para la Máquina de Inducción Trifásica En este capítulo se explica un método para la estimación de parámetros de la máquina de inducción a partir de los datos del fabricante. En estos momentos son varios los métodos existentes, después de la lectura de varios de ellos como por ejemplo: [4], [5], [6]. Se ha optado por usar el método explicado a continuación por su sencillez de cálculos, ya que con otros métodos los cálculos usan algoritmos complejos. Estas estimaciones son de vital importancia para conocer con exactitud el modelo de cada máquina. Existen métodos experimentales, pero suponen un largo tiempo de ensayos, debido a que se realizan ensayos a cada uno de los motores. Con estos métodos de estimaciones se obtienen los parámetros con unos cálculos a partir de los datos del fabricante, evitando realizar ensayos. Mediante los métodos experimentales se consiguen muchos puntos de funcionamiento, en cambio con los datos del fabricante solo nos proporcionan cuatro; lo cual supone que con métodos experimentales los algoritmos son más precisos al disponer de más datos. 3.1 Determinación de parámetros NEMA de diseño del motor de inducción a partir de datos del fabricante. En este apartado se resume el método explicado por M. H. Haque, Determination of NEMA design induction motor parameters from manufacturer data. [7] Un motor de inducción tiene 5 tipos de pérdidas: en los devanados del estátor y del rotor (Pcu); en el núcleo (Pcore), pérdidas por fricción y rozamiento con el aire (Pfw); y en la carga (Pstray). En general las pérdidas del núcleo y las pérdidas por rozamiento y fricción se consideran constantes en la zona de funcionamiento nominal, pero las pérdidas de carga y la del cobre dependen de la carga. En muchos casos las pérdidas de carga no se tienen en cuenta debido a su magnitud relativa y a su naturaleza variable. La suma de las pérdidas del núcleo y las de rozamiento y fricción se considera una perdida constante que llamaremos Pconst. En este estudio Pconst se determina a plena carga y luego se divide en Pcore y Pfw usando una constante predefinida. Se ha podido ver que para el modelo de jaula sencilla se obtienen 4 parámetros independientes cuándo las pérdidas por núcleo se desprecian, pero cuándo las pérdidas por núcleo se consideran se deberán tener 5 parámetros independientes. Con una relación entre Pconst y Pcore, se puede considerar que el circuito tiene 4 parámetros independientes, pero se requiere la determinación de otra variable Pconst. Se considera que las características del motor son menos sensibles hacia la resistencia del estátor (R1) y por tanto: R1 = α r ⋅ R2 ' (3.1) En la ecuación 3.1 la αr es una constante positiva. Como se había mencionado antes Pconst se determina a plena carga y después se divide en Pcore y Pfw. Por lo tanto, la siguiente condición es: Pcore = α c ⋅ Pconst ⇒ Pfw = (1 − α c ) ⋅ Pconst 14 (3.2) Los valores de la constante αc son valores positivos menores de 1. Conociendo Pcore, el valor de la resistencia Rc se puede calcular como: Rc = 3 ⋅ E 2 ( s FL ) Pcore (3.3) En este caso la tensión EsFL es la indicada en la rama central de la figura 7 a deslizamiento a plena carga. Figura 7 Tensión EsFL del circuito equivalente Por tanto el problema quedará con las incógnitas de cuatro parámetros del motor (R2‘, X1, X2‘, Xm) y la perdida constante (Pconst). Con el estudio realizado por el señor Haque estas 5 incógnitas se determinan con la siguiente información disponible con los datos del fabricante: - Potencia mecánica de salida a plena carga (PoFL) - Par máximo (Tmax) - Par de arranque (Tst) - Potencia activa a plena carga (PinFL) - Potencia reactiva a plena carga (QinFL) Las tres primeras informaciones se obtienen directamente del catálogo y las dos siguientes se extraen fácilmente con los datos del rendimiento a plena carga (ηFL) y el factor de potencia a plena carga (cosφFL) que se extraen también del catálogo. PinFL = PoFL (3.4) η FL QinFL = PinFL ⋅ tan ϕ FL (3.5) A plena carga, la corriente del estátor de línea y el par electromagnético puede obtenerse mediante las fórmulas: I FL = TFL = PoFL 3 ⋅ V ⋅ η FL ⋅ cos ϕ FL ( 60 ⋅ PoFL + Pfw 2 ⋅ π ⋅ n FL 15 ) (3.6) (3.7) Aquí el voltaje se expresa como V y la velocidad del motor a plena carga en revoluciones por minuto [r.p.m] es nFL. Las ecuaciones para calcular inicialmente los valores de las 5 variables (R2‘, X1, X2‘, Xm y Pconst) se presentan a continuación: R2' = s FL ⋅ PoFL 3 ⋅ I12FL X1 = X 2 ' = Xm = 0,05 ⋅ V1 I1FL V1 0,2 ⋅ I 1FL Pconst = 0,03 ⋅ P0FL (3.8) (3.9) (3.10) (3.11) En estas ecuaciones sFL es el sincronismo a plena carga, P0FL es la potencia mecánica de salida a plena carga, I1FL es la corriente de fase a plena carga por el estátor y V1 el voltaje por fase. Según se muestra en [7] (tabla III) los valores de las constantes αr y αc hacen variar los errores. Aún así estos errores no son muy grandes. Los valores de αr y αc dónde el error es mínimo son para los valores de 1,5 y 0,5 respectivamente, por tanto serán estos los valores a aplicar en las ecuaciones pertinentes. 16 4 Datos de Partida para la Estimación de Parámetros 4.1 Introducción Para realizar la estimación de parámetros son necesarios unos datos de partida. A partir de estos datos realizando unos cálculos se obtienen los parámetros eléctricos, que en nuestro caso son: R1, R2’, X1, X2’ y Xm. En este apartado se van a enumerar los datos de partida para realizar la estimación y qué cálculos se han realizado para obtener los parámetros, así como para calcular los diferentes valores del par y de la corriente. 4.2 Origen de los Datos Los datos a partir de los cuáles se obtienen los parámetros pueden ser referencias suministradas por el mismo fabricante del motor, los cuales se detallan en los catálogos o datos obtenidos a partir de la realización de ensayos en los motores. Los fabricantes nos proporcionan una gran cantidad de datos del motor, como son: datos eléctricos (potencia nominal, intensidad nominal, par nominal, par máximo, velocidad nominal, entre otros) y datos de construcción (altura eje, peso, tipo de aislamiento entre otros). Sin embargo todos estos datos hacen referencia, únicamente a 4 puntos de funcionamiento. A partir de datos suministrados en el catálogo y realizando unos cálculos se obtienen los parámetros de la máquina a estudiar. Con este método se obtienen los parámetros de una gran cantidad de motores en un corto periodo de tiempo, lo cual supone una ventaja si se quiere realizar un estudio de una gran cantidad de motores; por el contrario, la precisión de estos parámetros obtenidos no suele ser muy elevada y se ve limitada a esos 4 puntos de funcionamiento: arranque (O), par máximo (M), condiciones nominales (N) y sincronismo (S). Figura 8 Representación puntos de operación facilitados por el fabricante [3] Mediante la realización de ensayos se pueden obtener datos en puntos de funcionamiento adicionales, pero como inconveniente el proceso es más lento y laborioso ya que se deben realizar ensayos motor por motor en un laboratorio con un banco de pruebas adecuado. Los ensayos básicos con los que se obtienen los parámetros son: ensayo de vacío, o de rotor libre, con el que se obtiene la Rc y la Xm y ensayo de cortocircuito, o de rotor bloqueado, con el cual se obtiene el resto de parámetros. Se pueden realizar medidas 17 experimentales en puntos de funcionamiento estable e inestable cuándo la máquina se encuentra en régimen permanente. Figura 9 Representación datos experimentales [3] Por tanto, con datos del fabricante se obtienen únicamente en los puntos de funcionamiento de par máximo, par nominal, velocidad de sincronismo y arranque. Mientras que con datos experimentales se pueden obtener valores en varios puntos de funcionamiento. En la figura 8 se muestran los 4 puntos de funcionamiento utilizados en los catálogos de los fabricantes, y en la figura 9 se puede observar un ejemplo de los puntos de funcionamiento en los que se ha ensayado en el laboratorio una máquina de inducción trifásica. En este trabajo se ha optado por obtener los parámetros eléctricos a partir de datos suministrados por el fabricante. Ya que el estudio se realiza sobre una gran cantidad de motores y es una técnica interesante ya que si se obtuviera una alta precisión estas técnicas serían de alta utilidad. 4.3 Técnicas para la Estimación a partir de Datos de Catálogo Las técnicas para la estimación de parámetros que utilizan únicamente datos proporcionados por los fabricantes no requieren medidas experimentales (banco de pruebas) y requieren un tiempo relativamente corto. El inconveniente de este método es el desconocimiento del comportamiento de la máquina a lo largo de toda la zona de funcionamiento, ya que en este caso los puntos de referencia utilizados por el algoritmo son los dados por el fabricante (arranque, par máximo, nominal y sincronismo). Algunos estudios de algoritmos que parten de datos de catálogo [3, 4, 5, 7] señalan que las simulaciones resultantes utilizando esta metodología contienen grandes errores respecto al comportamiento real, especialmente cuando se aplica sobre el modelo de jaula sencilla. La inestabilidad y sensibilidad de los parámetros han provocado a muchos investigadores analizar la evolución de los parámetros y la dependencia de éstos con otras variables o características de funcionamiento. Algunas técnicas tratan de estimar la evolución de los parámetros R2’, X2’ y Xm en función del deslizamiento, dejando los otros parámetros del modelo de jaula sencilla con valores fijos. Otras técnicas utilizan redes neuronales artificiales (RNA) para estimar el valor de los parámetros online por medio de sistemas de realimentación de estados y redes recurrentes en cada punto de funcionamiento. Una nueva técnica estudia la variación de los datos de todos los parámetros del modelo de jaula sencilla. La técnica utilizada en este trabajo realiza una estimación de los parámetros del rotor en dependencia del deslizamiento para motores con 18 diseño NEMA tipos A y B. Otra técnica estima los valores de R2’ y Xm en función del peso de la máquina y de los flujos electromagnéticos del campo de inducción. 4.4 Características de los Datos de Catálogo Utilizados Los fabricantes en los catálogos incluyen una gran cantidad de datos sobre las máquinas. Estos datos van desde características eléctricas, mecánicas, hasta de tipo constructivo. Por tanto es necesario establecer unos criterios para seleccionar aquellos datos que puedan resultar útiles para llevar a cabo el presente trabajo. Previamente se han seleccionado los principales fabricantes de motores de inducción trifásicos con rotor en jaula de ardilla. Los fabricantes utilizados para este trabajo son: ABB, Siemens, Rossi, Leroy Somer, CMG, WEG y Marelli. Analizados los diferentes catálogos y las características eléctricas necesarias para el trabajo se llega a la conclusión que se van a usar los diferentes datos de los fabricantes enumerados a continuación; si los datos no se usan directamente en los cálculos pueden ser de utilidad para comprender mejor el funcionamiento del motor. Datos de catálogo utilizados: - Fabricante: Texto dónde se detalla el fabricante al cual pertenece el motor. - Tipo: Código único para cada motor que utiliza el fabricante para indicar que tipo de motor es, suele venir detallado en la placa de características. - Potencia nominal: Número que nos indica la potencia nominal del motor, expresado normalmente en kW, (PN). - Velocidad sincronismo: Número que indica la velocidad teórica, función de frecuencia y número de polos de la máquina, expresado en r.p.m o r/min, (n1). - Velocidad nominal: Número que indica la velocidad a la que gira realmente el rotor en funcionamiento nominal, expresado en r.p.m o r/min (nn). - Polos: Número (2, 4, 6, 8…) que modifica directamente la velocidad nominal del rotor. - Conexión: Texto que nos indica el tipo de conexión del motor, puede ser estrella o triángulo. - Voltaje: Número que nos indica la tensión normal de funcionamiento del motor. Se expresa en voltios (V), - Frecuencia: Número de oscilaciones de la onda, expresada en Hz (f), normalmente 50 Hz o 60 Hz. - Rendimiento: Número que nos indica cuanto rinde el motor, expresado en % (η). - Factor de potencia: Número que indica la capacidad del motor de absorber potencia activa, valor entre 0 y 1, (cos φ). - Intensidad nominal: Número que indica la corriente que consume el motor en estado normal, se expresa en A (IN). - Intensidad arranque / Intensidad nominal: Relación que nos determina la intensidad al arranque, (IS/IN, IA/IN…) 19 4.5 - Par nominal: Número que nos expresa el momento de fuerza que realiza el motor sobre el eje, expresado en N·m (TN o MN). - Par arranque / Par nominal: Relación que nos indica el par de arranque, (MA/MN, TI/TN, Md/Mn) - Par máximo / Par nominal: Relación que nos indica el par máximo, (TM/TN, Tb/TN, MK/MN) Estimación de Parámetros en los Motores Seleccionados En este apartado se va explicar cómo se han calculado los parámetros eléctricos (R1, X1, Xm, R’2, X’2) de los motores seleccionados. Así como explicar los cálculos realizados para analizar más en adelante los errores en la simulación del comportamiento del motor con los parámetros estimados. Para ello se calculará la intensidad y par en los diferentes puntos de funcionamiento (arranque, nominal y máximo). Con la ayuda de una hoja de cálculo, se ha realizado una base de datos con todos los motores y los datos mencionados en el punto 4.4. Para calcular los parámetros del circuito equivalente de un motor de inducción trifásica se han utilizado las ecuaciones explicadas en el punto 3. R1 = 1,5 ⋅ s FL ⋅ PN ⋅ 1000 3 ⋅ I N2 R2 ' = s FL ⋅ PN ⋅ 1000 3 ⋅ I N2 (4.1) (4.2) Siendo: s FL = X1 = X 2 '= Xm = n1 − n N (4.3) n1 0,05 ⋅ V1 IN V1 0,2 ⋅ I N (4.4) (4.5) Siendo V1, tensión de fase (V). El esquema del circuito equivalente obtenido al despreciar el valor de Rc debido a su elevado valor es el siguiente, así como se explico en el capítulo 2: Figura 10 Circuito equivalente despreciando Rc 20 A continuación se va explicar como se han calculado los diferentes valores del par y de la intensidad. Para simplificar el esquema y poder calcular la intensidad que circula por el rotor (I’2) con mayor facilidad se ha decidido realizar el equivalente Thevenin de R1, X1 y Xm. Por tanto el circuito quedaría de la siguiente forma: Figura 11 Circuito equivalente Thevenin El valor de la resistencia de Thevenin se obtiene mediante la ecuación: Z th = jX m ⋅ ( R1 + jX 1 ) R1 + j ( X 1 + X m ) (4.6) Mientras que el valor de la tensión de Thevenin se obtiene mediante la ecuación siguiente, se supone que la tensión V1 tiene un ángulo de desfase de 0º. Vth = jX m ⋅ V1 R1 + j ( X 1 + X m ) (4.7) Por tanto para calcular la intensidad de rotor (I’2) de la figura 11 se realizará con la siguiente ecuación: I '2 = Vth (4.8) 2 R' 2 Rth + 2 + ( X th + X ' 2 ) s Se puede observar que el valor de I’2 es función de la “s”, por tanto para cada velocidad el valor de I’2 variará. Por tanto, se deberá calcular el valor de la intensidad de rotor para el arranque (s=1), para la velocidad nominal (s=sFL) y para la velocidad dónde el par es máximo, en el cual la “sM” se calcula de la siguiente forma, según [2]: sM = R' 2 Rth2 + ( X th + X ' 2 ) (4.9) 2 Una vez se obtienen las tres intensidades de rotor (arranque, par máximo y nominal) se procede a calcular el par mediante la fórmula siguiente [2]: T= 3 ⋅ R' 2 2 ⋅ I '2 ws ⋅ s 21 (4.10) Los valores de R’2 y ws serán constantes para cualquier punto de funcionamiento, pero como se ha dicho anteriormente los valores de s e I’2 varían según el punto de funcionamiento pudiendo ser estos en punto de arranque (s=1), punto de par máximo y punto de velocidad nominal. Siendo: ws = 2 ⋅π ⋅ n1 60 (4.11) También se ha calculado el valor de la intensidad que circula por el motor para posteriormente compararla con el valor de la intensidad de catalogo, tanto la de arranque (s=1) como la nominal (s=sFL), para ello se ha utilizado la siguiente ecuación: I= V1 Z total (4.12) La Ztotal de la figura 10 se calcula de la siguiente manera: Z total R' 2 + X '2 ⋅ X m s = (R1 + X 1 ) + R ' 2 + X '2 + X m s (4.13) Cómo resumen, con los cálculos anteriores se han conseguido una serie de parámetros los cuales se van a analizar en capítulos posteriores. Además, a partir de estos mismos parámetros y de las ecuaciones expresadas anteriormente, se pueden obtener los valores de par e intensidad estimados para cualquier punto de funcionamiento los cuales se podrán comparar y analizar los errores con los valores dados en el catálogo. Los parámetros calculados son los de la figura 10, (R1, X1, Xm, R’2, X’2). Los valores de par e intensidad son: - Par nominal (a velocidad igual al la del catálogo) - Par arranque (para s=1) - Par máximo (para s=sM, Ecuación 4.9) - Intensidad al arranque (s=1) - Intensidad nominal ( a velocidad igual al la del catálogo) Por tanto, los diferentes puntos calculados de los valores del par se podrían mostrar de manera general en una gráfica como se muestra en la figura 12. Esta gráfica muestra la idea general de cómo podrían salir los resultados, se ha obtenido en [3 y 7]. 22 Figura 12 Puntos de funcionamiento utilizados por el fabricante y puntos calculados a partir de los parámetros estimados Para comprobar la fiabilidad de los parámetros estimados se calcula, a partir de ellos, el valor del par para diferentes valores del deslizamiento. Posteriormente se obtienen los nuevos puntos de funcionamiento A’, M’ y N’, análogos a los utilizados por los fabricantes. Finalmente, se comparan los puntos estimados con los reales para calcular el error obtenido a partir de los parámetros estimados inicialmente. Como se puede observar para calcular el error entre los puntos A y A’ (punto de arranque) no cabe lugar a dudas, siendo el error la diferencia de par entre estos, ya que el valor del deslizamiento es igual para ambos puntos. Inicialmente, se procede igual con el error entre los puntos M y M’, comparando únicamente el valor de par entre ambos puntos. En el caso del error entre los puntos N y N’ se pueden obtener dos tipos de errores. El primero se realizaría calculando el par con un valor de deslizamiento igual al del catálogo, como se ha realizado anteriormente, ecuaciones 4.8 y 4.10 en las cuales se suponía un deslizamiento de valor igual al facilitado por el catálogo (error en vertical). El segundo tipo seria un error a par constante (error en horizontal), para ello se debería de calcular el valor del deslizamiento suponiendo el valor del par el mismo que el dado en el catalogo a par nominal. En la figura 13 se pueden observar los tres puntos diferentes. Se observa que la diferencia (error) entre N y N’2 es mucho menor que entre N y N’1, por tanto se va a estudiar el error en el punto de velocidad nominal como el error de velocidades (deslizamiento) a par constante. 23 Figura 13 Posibles puntos nominales Para calcular este error, primero se debe calcular cual es valor de “s” para un par constante con los parámetros calculados previamente, para ello con las ecuaciones 4.8 y 4.10 se obtiene la igualdad siguiente: TN = 3 ⋅ R' 2 Vth2 ⋅ 2 ws ⋅ s R' 2 2 Rth + + ( X th + X ' 2 ) s (4.14) Al despejar la incógnita que en este caso seria “s”, se obtiene la ecuación 4.15, a partir de la cual se calculará el valor de la velocidad nominal y se comparará con la velocidad nominal dada por el fabricante para así poder calcular el error. s= − 2 ⋅ TN ⋅ R '2 ⋅Rth ⋅ ws + 3 ⋅ R '2 ⋅Vth2 − (2 ⋅ T ) ( )( ⋅ R '2 ⋅Rth ⋅ ws − 3 ⋅ R '2 ⋅Vth2 − 4 ⋅ TN ⋅ ws ⋅ ( X th + X '2 ) + TN ⋅ ws ⋅ Rth2 ⋅ R '22 ⋅ws ⋅ TN 2 N 2 2 ⋅ TN ⋅ ws ⋅ ( X th + X '2 ) + 2 ⋅ TN ⋅ ws ⋅ R 2 2 th (4.15) La velocidad nominal se obtiene directamente mediante la expresión: n N = n1 − (s ⋅ n1 ) (4.16) En este capítulo se han descrito las diferentes formulas las cuales a partir de los datos suministrados por el fabricante se han obtenido los parámetros del circuito equivalente del motor asíncrono de jaula de ardilla simple (R1, X1, Xm, R’2, X’2), además de la intensidad de arranque, intensidad nominal, el par de arranque, el par nominal, el par máximo y la velocidad nominal. En los capítulos siguientes se va a estudiar la variación de los parámetros obtenidos y comparar los valores de intensidad, par y velocidad obtenidos mediante los cálculos mostrados. 24 ) 5 Análisis de Error de la Simulación del Comportamiento del Motor a partir de los Parámetros Estimados. 5.1 Introducción El objetivo de los capítulos anteriores era obtener mediante los datos del fabricante los parámetros estimados del circuito equivalente del motor asíncrono. Y usando el valor de los parámetros calcular algunos datos característicos suministrados por el fabricante para poder compararlos con estos. Así se analiza el error obtenido entre estos datos (los calculados vs. los de fabricante), el análisis se realiza con una amplia gama de motores usando varios fabricantes y potencias desde 50 W hasta 1.000 kW. Los errores a calcular serán: - Par máximo - Par al arranque - Par nominal - Intensidad arranque - Intensidad nominal Por tanto en este capítulo se va analizar la fiabilidad del método de estimación de parámetros de la máquina de inducción estudiada en el capitulo 3, pudiendo esta variar en los diferentes puntos de funcionamiento del motor y con las diferentes familias de motores. 5.2 Metodología de Trabajo Para analizar la fiabilidad del método de estimación de parámetros de la máquina de inducción se ha decidido comparar los datos del par en sus diferentes puntos de funcionamiento así como el valor de la intensidad en los puntos de funcionamiento conocidos (nominal y arranque). En diferentes textos [1, 3, 7] la curva de par / velocidad generalizada para los motores asíncrono es la siguiente. Figura 14 Curva par-velocidad motor asíncrono [8] 25 En este apartado se van a observar la oscilación de los errores en los puntos de par de arranque, par máximo y par nominal. El error que esperamos obtener en este trabajo se muestran en la figura 15, siendo este un error en el arranque considerable y de valor negativo, en cambio en el punto de par máximo se espera un error positivo y algo más elevado que el error al arranque y en cambio en el punto de funcionamiento nominal se espera obtener un error pequeño. Figura 15 Puntos de funcionamiento utilizados por el fabricante vs. calculados a partir de los parámetros estimados Como se explicó en el capítulo 4 se han tenido en cuenta los tipos de error en el punto nominal. Pudiendo tener un error horizontal (error en la velocidad) o un error vertical (error en el par). Se decidido que el error mas pequeño será el error que se estudiará y mostrará en las gráficas. Figura 16 Errores en el punto nominal Para calcular los diferentes errores se han usado las siguientes ecuaciones: Error par máximo: Error par arranque: ETMAX = TMAX Calculado − TMAX Fabricante TMAX Fabricante ETA = T A Calculado − T A Fabricante T A Fabricante 26 (5.1) (5.2) ETN = Error par nominal: Error velocidad: E nN = TN Calculado − TN Fabricante TN Fabricante n N Calculado − n N Fabricante n N Fabricante (5.3) (5.4) Error intensidad nominal: E IN = I N Calculado − I N Fabricante I N Fabricante (5.5) Error intensidad arranque: E IA = I A Calculado − I A Fabricante I A Fabricante (5.6) Una vez se obtienen los diferentes errores únicamente falta representarlos en función de la potencia. Por la gran variedad de valores de potencia se ha decidido representar los valores en función del logaritmo de la potencia y no de la potencia directamente, para así obtener unas gráficas más visualmente entendibles. Debido a la gran cantidad de gráficas que se pueden realizar sobre la base de datos realizada, se ha decidido usar el programa “R”. “R” es un programa de software libre para el análisis estadístico y gráfico. Para realizar gráficas sobre grandes bases de datos han creado un paquete para “R” llamado “Rcommander”, por tanto para este trabajo se ha utilizado el “Rcommander” para realizar las gráficas. 5.3 Características de la muestra escogida La muestra escogida para realizar este estudio suma un total de 2.206 motores. Se han utilizado diferentes fabricantes: ABB (año catálogo 2010), Siemens (año catálogo 2009), WEG (año catálogo 2011), Leroy Somer (año catálogo 2010), Marelli (año catálogo 2010), Rossi (año catálogo 2010) y finalmente CMG (año catálogo 2010). El rango de potencias es de 0,05 a 1.000 kW. Para tener una visión de la cantidad y variedad de motores con los cuales se está desarrollando el trabajo, a continuación se muestran una serie de gráficas. Dos Cuatro Seis Ocho Gráfica 1 Distribución motores por número de polos 27 La gráfica 1 nos muestra en que porcentajes están distribuidos los motores del estudio, viéndose que los motores de dos y cuatro polos son los predominantes. O también pudiéndose expresar como los motores de 3.000 rpm y 1.500 rpm respectivamente. 50 Hz 60 Hz Gráfica 2 Distribución motores por frecuencias Unidades La gráfica de distribución por frecuencias muestra que la frecuencia predominante es la de 50 Hz con más de 3/4 de los motores. 700 600 500 400 300 200 100 0 ABB Siemens WEG Leroy Somer Marelli Gráfica 3 Distribución por marcas 28 Rossi CMG Unidades 1600 1400 1200 1000 800 600 400 200 0 0-50 50-100 100200 200300 300400 400500 500600 600700 700800 8001000 Potencia (kW) Unidades Gráfica 4 Distribución por potencias 700 600 500 400 300 200 100 0 0-5 5-10 10-15 15-20 20-25 25-30 30-40 40-50 Potencia (kW) Gráfica 5 Distribución por potencias <50kW Con las gráficas anteriores se puede observar que predominan motores menores de 5 kW esto es debido a que los fabricantes poseen una gama más amplia en motores más pequeños de 5 kW debido a que son los mas utilizados. Las marcas predominantes son ABB, Siemens, WEG y Leroy Somer. El motor más pequeño del estudio es de 50 W. 29 5.4 Errores Calculados A continuación se van a mostrar los errores en tanto por uno. El error obtenido surge de la comparación entre los datos calculados a partir de los parámetros estimados y los datos del catálogo. En cada una de las gráficas por puntos siguientes, cada punto representa uno de los motores de la muestra. Gráfica 6 Errores Tmax, Tarranque, Tn (n=cte) / Logaritmo de la potencia En esta gráfica se puede observar que el error calculado para el par nominal a una velocidad constante es tiene un error elevado. En cambio al realizar la misma gráfica con el error de par nominal a par constante (gráfica 7) se observa que es mucho menor. Por tanto se demuestra lo explicado en la figura 16 y se justifica el cálculo del error en la velocidad nominal a par constante. 30 Gráfica 7 Errores Tmax, Tarranque, Vel. nominal (T=cte) / Logaritmo potencia Como se ha dicho anteriormente en esta gráfica se observa que el error en la velocidad nominal calculado a par constante es mucho menor que los errores en par máximo y par de arranque. A continuación se va a graficar cada error por separado, mostrando la cantidad de los errores y el valor medio del error o el error cuadrático medio en el caso de errores positivos y negativos. ERROR PAR DE ARRANQUE Gráfica 8 Error Par arranque / Logaritmo de la potencia 31 Cantidad 1000 900 800 700 600 500 400 300 200 100 0 -1 a -0,5 -0,5 a 0 0 a 0,5 0,5 a 1 1a2 2a4 Error Gráfica 9 Frecuencia error Par arranque ERROR CUADRÁTICO MEDIO: 0,57 Mediante las gráficas 8 y 9 se puede observar que el error al arranque obtiene unos valores elevados en motores pequeños de -1 a 0 en la gráfica, lo cual se traduce a motores menores de 1 kW. Para motores entre 1 y 10 kW (0 y 1) se obtienen valores cercanos al cero y en cambio para motores de grandes potencias el error se hace negativo y cercanos a un error de -0,5. Debido a la gráfica por puntos, los puntos con valores muy diferentes al resto destacan mucho, como por ejemplo los valores más elevados, aunque gracias a la gráfica 9 se observa que estos valores son muy poco comunes. Siendo el error más común entre los motores un error entre -0,5 y 0. Además el error cuadrático medio obtenido es de 0,57 siendo esto un error del 57%, lo cual es un error considerable. 32 ERROR PAR MÁXIMO Cantidad Gráfica 10 Error Par máximo / Logaritmo de la potencia 1000 900 800 700 600 500 400 300 200 100 0 0 a 0,5 0,5 a 1 1 a 1,5 1,5 a 2 2a3 3a4 4a6 Error Gráfica 11 Frecuencia error Par máximo PROMEDIO: 1,03 En el caso del error en el punto de funcionamiento de par máximo no se puede observar una relación entre el error y el valor de la potencia, ya que los valores del error están situados la mayoría cerca del 1 en todo el rango de potencias. Aunque la gráfica de frecuencia de los errores nos indica que el error entre 0,5 y 1 es el más común, se obtiene un error promedio de 1,03. Lo cual nos indica que el método de estimación de parámetros no es fiable para el punto de funcionamiento de par máximo. 33 ERROR VELOCIDAD NOMINAL Gráfica 12 Error Velocidad nominal / Logaritmo de la potencia 1400 1200 1000 800 600 400 200 0 0 a 0,01 0,01 a 0,02 0,02 a 0,03 0,03 a 0,05 0,05 a 0,1 0,1 a 0,2 Error Gráfica 13 Frecuencia error Velocidad nominal PROMEDIO: 0,02 En este caso, se obtienen unos errores muy pequeños y la tendencia nos indica que para motores grandes el error tiende a valores muy próximos a cero. Por tanto las gráficas anteriores nos indican que el método estudiado tiene una alta fiabilidad para el punto nominal. El promedio de error es de 0,02 (2%) un valor considerablemente bajo. 34 A continuación se van a mostrar las gráficas obtenidas de los errores en las intensidades, tanto en la intensidad en el arranque y en el valor nominal. Gráfica 14 Error Intensidad arranque y nominal Debido a que el fabricante no nos proporciona la intensidad en el punto de par máximo el estudio de los errores sólo se puede realizar en los puntos de arranque y punto nominal de funcionamiento. Con la gráfica 14 se puede observar con la excepción de algunos motores muy puntuales que la tendencia es la de reducir el error para motores grandes. Además en el caso de intensidad nominal se muestran dos grupos que más en adelante se va a tratar de averiguar si tienen alguna relación. 35 ERROR INTENSIDAD EN EL ARRANQUE Cantidad Gráfica 15 Error Intensidad arranque / Logaritmo potencia 1200 1000 800 600 400 200 0 -0,5 a 0 0 a 0,5 0,5 a 1 1 a 1,5 1,5 a 2 2 a 2,5 2,5 a 4 Error Gráfica 16 Frecuencia Error Intensidad arranque ERROR CUADRÁTICO MEDIO: 0,60 En la gráfica 15 se observa con la excepción de algunos motores puntuales que la tendencia es que a motores más grandes se obtiene un error más pequeño. Se puede observar que según el tipo de conexión se obtiene un error positivo o negativo, siendo las conexiones en triangulo un error negativo de aproximadamente -0,5. En cambio, para motores en estrella el error es positivo cercano también a la 0,5. Se obtiene un error cuadrático medio de 0,60. 36 ERROR INTENSIDAD NOMINAL Cantidad Gráfica 17 Error Intensidad nominal / Logaritmo potencia 1600 1400 1200 1000 800 600 400 200 0 0 a 0,25 0,25 a 0,5 0,5 a 1 1 a 1,5 1,5 a 2 2a4 Error Gráfica 18 Frecuencia Error Intensidad nominal ERROR CUADRÁTICO MEDIO: 0,50 En este caso se encuentra la misma relación entre el tipo de conexión, para motores conectados en triángulo el error es negativo que para los motores en estrella. Para ambos casos la tendencia es la misma que en el caso anterior, siendo un error menor a potencias grandes. La gráfica de frecuencias muestra que la mayoría de los errores están entre 0-0,25. 37 En este apartado se han mostrado diferentes gráficas para observar con que tipo de motores se ha realizado el trabajo. Siendo el motor predominante un motor de 50 Hz, 4 polos, potencia menor de 5 kW y de la marca ABB. Se ha realizado un estudio para observar la fiabilidad del método de estimación de parámetros. Para ello, se ha calculado la diferencia entre los valores de par calculado mediante los parámetros estimados y los valores de par dados por el catálogo. Las gráficas muestran el error en tanto por uno entre el valor suministrado por el fabricante y el valor calculado mediante los parámetros estimados. Con este estudio se ha podido llegar a la conclusión que para motores de potencia elevada el error es más pequeño, por tanto el método de estimación de parámetros de Haque [7] es más fiable para motores grandes. Comparando los errores obtenidos del par en el punto de arranque, nominal y par máximo; se obtiene que para cálculos en el punto de funcionamiento nominal el método de estimación de parámetros tiene un error pequeño, en cambio en el punto de par máximo y punto de arranque el error es elevado. Por tanto, podemos decir que este método en general es fiable, ya que el punto de arranque y el punto de par máximo son situaciones muy breves y puntuales (zona inestable), siendo la zona más común de trabajo de una máquina asíncrona la zona entre el punto nominal y punto de sincronismo. En el punto de sincronismo el error es nulo, debido a que el punto queda determinado por la velocidad de sincronismo; por tanto se puede deducir que en la estrecha zona de funcionamiento entre el punto nominal y el punto de sincronismo el error será muy pequeño (0,02 a 0). La predicción por tanto que se realizó en el punto 5.2 figura 15 se ha cumplido, ya que se esperaba un error al arranque elevado y positivo respecto a los otros tres puntos, un error no muy grande y negativo al arranque; un error positivo y muy pequeño en el punto nominal. Con el estudio del error en la intensidad tanto en el arranque como en el nominal, se observa la misma tendencia de error más pequeño a potencias mayores. En ambos casos se encuentra una relación entre los errores entre el tipo de conexión, teniendo un error negativo para los motores con conexión triángulo. Como conclusión final se puede decir que el método de estimación de parámetros estudiado es fiable para motores grandes (P > 10 kW) asíncronos de jaula de ardilla. 38 6 Estudio Longitudinal del Valor de los Parámetros Estimados 6.1 Introducción En este capítulo se va a realizar un estudio longitudinal de los valores de los parámetros estimados con el método explicado anteriormente. Los parámetros calculados son R1, X1, Xm, R’2, X’2, se muestran en la figura siguiente: Figura 17 Circuito equivalente motor asíncrono Se van a realizar gráficas de todos los parámetros respecto a la potencia y al par dados por el fabricante, para observar como varían los diferentes parámetros para diferentes valores de potencias y pares. Se ha decidido calcular el logaritmo de la potencia y el logaritmo del par para poder visualizar con más claridad las gráficas. Además a lado de cada gráfica se muestra la misma gráfica pero con los valores en valor por unidad. Para calcular los diferentes parámetros en p.u. se ha procedido con las siguientes fórmulas, además en el apartado de anexos se realiza una explicación más amplia de los valores por unidad. Z base = VF IF R1, p.u = R1,real R ' 2, p.u = R ' 2,real X 1, p.u = X 1,real X ' 2, p.u = X ' 2,real Z base Z base Z base Z base 39 (6.1) (6.2) (6.3) (6.4) (6.5) 6.2 Resistencia rotor vs. Par A continuación se van a mostrar diferentes gráficas en las cuales se van a representar la resistencia del rotor en función del par al arranque, par máximo y par nominal. Los valores del par son los que aparecen en el catálogo suministrado por el fabricante. También se representarán los valores en p.u de la resistencia del rotor en función del par. Gráfica 19 R rotor / Log Par arranque Gráfica 20 R rotor / Log Par máximo 40 Gráfica 21 R rotor / Log Par nominal En estas tres gráficas se puede observar que el valor de la resistencia del rotor disminuye a medida que el valor del par aumenta. En ambos tres casos a partir de un par aproximado de 100 Nm (2 en la gráfica) se obtienen una resistencia de rotor cercana al cero (nunca puede ser cero). En valores dónde el par es pequeño (menor de 1 Nm) los valores son mas dispares, como muestra la gráfica siguiente hay muy pocos valores del logaritmo del par bajos. Cantidad Con las gráficas realizadas con valores en p.u se puede observar que hay una cierta tendencia, siendo una resistencia menor para valores de par más elevados. Aunque resulta muy difícil obtener una línea de tendencia perfectamente definida. 450 400 350 300 250 200 150 100 50 0 -1 a 0 0 a 0,5 0,5 a 1 1 a 1,5 1,5 a 2 2 a 2,5 2,5 a 3 3 a 3,5 3,5 a 4 Logaritmo par nominal Gráfica 22 Frecuencias logaritmo par nominal 41 6.3 Parámetros vs. Potencia En esta sección se van a mostrar cómo varían los diferentes parámetros según el valor de la potencia. Además se mostrarán los valores en valor por unidad, para obtener una visión más clara y sin distinción de tipo de conexión. Gráfica 23 R1 / Log. Potencia En esta primera gráfica dónde se representa la R1 o resistencia del estátor, se puede observar que la resistencia disminuye hasta valores muy próximos a cero a medida que la potencia del motor aumenta. Con los valores en p.u la tendencia es algo más clara y se observa que hay una gran cantidad de puntos con valores entre 0 y 0,05. Además se puede observar una pequeña diferencia entre valores de motores en estrella o en triángulo. Siendo los valores en triangulo algo más elevados, cumpliendo la relación: Z triángulo = 3 ⋅ Z estrella (6.6) Gráfica 24 R1 (valores < 5) / Log. Potencia La siguiente gráfica se ha realizado con los mismos valores que la anterior pero sólo para valores pequeños de R1 (< 5Ω), con ello podemos ver que la tendencia es la misma que el gráfica 23 la cual es reducir la resistencia al aumentar la potencia. 42 Gráfica 25 R’2 / Log. Potencia En la gráfica 25 se ha representado la R’2 o resistencia de rotor, en este caso la tendencia es la misma y los valores de la resistencia muy parecidos a los de la R1. Por tanto se ha podido observar que los valores de las resistencias disminuyen al aumentar la potencia de la máquina, pero no existe una relación directa con los valores en p.u aunque si unos valores muy predominantes, siendo el rango para R1 de 0,05 a 0,01 y para R’2 de 0,03 a 0,01. También han sido realizadas gráficas R’2 vs. TA/TN y R’2 vs. TM/TN, no se ha podido encontrar una posible relación directa con las relaciones de par máximo y par al arranque con el valor de la resistencia del rotor en p.u. Gráfica 26 X1 / Potencia 43 Gráfica 27 X2 / Potencia Las gráficas 26 y 27 representan la variación de los parámetros X1 y X2 respectivamente, ambos valores según los cálculos realizados por el método de estimación estudiado son exactamente los mismos, por tanto ambas gráficas son idénticas. La tendencia en el caso de X1 y X2 es la misma que con las resistencias, disminuir el valor de las inductancias a medida que la potencia aumenta. Con contra, en este caso si se ve una clara distinción entre valores conectados en estrella o triángulo, cumpliéndose de nuevo la relación 6.6. Por otro lado, al representar los valores de las inductancias en p.u se obtiene un valor fijo para todos los motores, sin distinción de conexión ni potencia. Por tanto, con este método de estimación de parámetros se puede decir que calculada la impedancia base se obtendría la inductancia multiplicando por el valor de 0,05 Gráfica 28 Xm / Potencia En este caso dónde se representa los valores de Xm, la tendencia de nuevo vuelve a ser la misma, con la única diferencia apreciable es que los valores son 100 veces mayores que los de X1 y X2. Lo mismo sucede con el valor en tanto por unidad, ya el valor de relación en este caso seria 5 44 Como conclusión, se puede determinar que con el estudio longitudinal realizado a los parámetros del circuito equivalente se ha podido observar que existente una relación de los parámetros con la potencia y el par. Esta relación es la de una disminución del valor de los parámetros cuándo la potencia del motor aumenta. Además se ha podido observar que los valores en motores conectados en triangulo son algo más elevados que en motores en estrella. No se ha podido encontrar otra relación con parámetros como velocidad de giro del motor, frecuencia y factor de potencia. Realizando el estudio con los valores en p.u en las inductancias se ha encontrado una relación directa, siendo de 0,05 para X1 y X’2 y de 5 para Xm. En cambio por los valores de las resistencias no se ha encontrado una relación pero si un rango de valores siendo para R1 un rango de 0,05 y 0,01; en cambio para R’2 es un rango de 0,03 y 0,01. Estos valores son muy similares a los que se detallan en [2], los cuales son: - R1 = 0,01 a 0,03 - X1 = 0,08 a 0,12 - R’2 = 0,01 a 0,03 - X’2 = 0,08 a 0,10 - Xm = 2,5 a 4 45 7 Conclusiones Las conclusiones finales de este trabajo son las que se detallan a continuación: - Se ha presentado el proceso por el cual se obtiene el circuito equivalente de un modelo de jaula sencilla de la máquina de inducción trifásica y de los parámetros que lo componen. - Se han analizado varios métodos para la obtención de dichos parámetros, tanto experimentales cómo teóricos; se han descrito las ventajas y desventajas de éstos. - Se ha realizado un profundo análisis para entender el método creado por el señor M. H. Haque [7], para determinar los parámetros del circuito equivalente directamente mediante los datos del fabricante. - Se ha realizado una base de datos de alrededor de 2.200 motores. Para cada uno de ellos se han obtenido los parámetros del circuito equivalente siguiendo el método descrito por Haque. Posteriormente, se ha realizado el estudio de la fiabilidad calculando el error entre los valores obtenidos a partir de los parámetros estimados, y los facilitados directamente por el fabricante. - Se ha llegado a la conclusión de que el método estudiado tiene una alta fiabilidad en el punto de funcionamiento nominal, en cambio para el punto de arranque no se obtiene una alta fiabilidad y para el punto de par máximo el error es importante. Además se ha podido observar que el método se vuelve más fiable para motores más grandes (P>10 kW). - Para hacer un análisis longitudinal de toda la base de datos creada, se han calculado los parámetros en valores por unidad. - Además se ha observado de que todos los parámetros estudiados tienden a disminuir a medida que la potencia de los motores aumenta. Con el estudio de los parámetros en valores por unidad se ha encontrado una relación directa con los valores de las inductancias, las cuales se mantienen constantes en un valor de 0,05 para todo el rango de potencias. En cambio para los valores de las resistencias no se ha encontrado una relación pero si un rango siendo este de 0,05 a 0,01. - Se han abierto varias algunas posibles futuras líneas de investigación: - Realizar el mismo estudio con el modelo de doble jaula, ya que es un método más fiable pero de cálculos más complejos. - Estudiar otros métodos para la estimación de parámetros a partir de datos del catálogo y realizar el mismo estudio para observar su fiabilidad en los diferentes puntos de funcionamiento del motor. 46 Referencias [1] Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura de eje. Manuel Cereijo Neira. 2011. Universitat Rovira i Virgili. [2] Máquinas eléctricas. Fraile Mora. 2007. Mac Graw-Hill [3] Estimación de parámetros y efectos de los huecos de tensión en la máquina de inducción trifásica. Adolfo Andrés Jaramillo Matta. 2010. [4] Estimación de parámetros en máquinas de inducción utilizando medidas de régimen permanente. F. Córcoles, L. Guasch, P. Santibañez y J. Pedra [5] On the determination of induction motor parameters from manufacturer data for electromagnetic transient programs. Joaquin Pedra. [6] Cálculo de los parámetros del motor de inducción a partir de datos de catálogo. Ángel Costa Montiel, Neculai Galan, Gloria Ciumbulea, Xose M. López Fdez. [7] Determination of NEMA design induction motor parameters from manufactures data. M. H. Haque. - Páginas Web: [8] automatismoindustrial.com/motores-asincronos (página Web dedicada al mundo de la electricidad) [9] www.raynetrepair.us/electric-motors/field-produced-by-each-phase-winding.html [10] www.engarena.com/electrical-engineering/examination-process-the-windings-of-a-3-phase-acmotor-with-an-ohmmeter.html - Asignaturas: [11] Máquinas Eléctricas 1 y 2 impartidas durante el curso. 47 8 Anexos 8.1 Listado de Símbolos Principales NEMA National electrical manufacters association 8.2 f.m.m Fuerza magnetomotriz f.e.m Fuerza electromotriz p.u. Valor por unidad El sistema por unidad Este trabajo se ha utilizado el sistema por unidad, por lo cual es de interés explicar qué es el sistema por unidad y su utilidad. Las magnitudes físicas pueden expresarse en función de sus unidades o en comparación con otra magnitud denominada magnitud base. Por tanto deben definirse los valores base para las posibles distintas utilizadas (tensión, corriente, impedancia, potencia…). La definición de la correspondiente magnitud en tanto por unidad es simplemente: (8.1) Con esta operación conocida con el nombre de normalización además de valor por unidad, las magnitudes pierden unidades y a veces resultan muy útiles. Por ejemplo es muy útil en estudios de motores cómo es nuestro caso, ya que al cambiar el tamaño de la máquina, su impedancia interna varía ampliamente. Así un valor bajo de una resistencia para una máquina de una tensión baja es relativamente grande, en cambio para una de una tensión elevada es un valor bajo. Sin embargo estudiando las impedancias de diferentes motores con el sistema de tanto por unidad basado en los valores nominales, se tiene que las impedancias de las máquinas eléctricas varían dentro de rangos muy estrechos. Los valores base suelen ser la tensión y la potencia aparente, en nuestro caso la tensión por fase y la intensidad por fase. Una vez seleccionadas estas el resto de magnitudes base quedan ligadas por la leyes comunes de teoría de circuitos. Z base = Vbase I base (8.2) Rbase = Z base ⋅ cos ϕ (8.3) X base = Z base ⋅ senϕ (8.4) Una vez seleccionadas las magnitudes base, obtener las magnitudes es tanto por unidad es simplemente dividir la magnitud real por el valor base así como indica la ecuación 8.1 de este capitulo. Z p .u . = Z real Z base R p .u . = R real Rbase 48 X p.u . = X real X base Algunas de las ventajas de el sistema por unidad es que los valores por unidad, base propia, característicos de máquinas similares, aunque de tamaños muy diferentes varían muy poco. Además en los cálculos se manejan cantidades que están en un margen estrecho alrededor de la unidad (condiciones normales), lo que permite comprobar los valores por una simple inspección. 49