tesis - Cenidet
Anuncio

SEP
SEIT
DGIT
CENTRO NACIONAL DE INVESTIGACIÓN
Y DESARROLLO TECNOLÓGICO
cenidet
REFLECTOMETRÍA EN EL DOMINIO DEL TIEMPO Y SU
APLICACIÓN A LA DETECCIÓN DE FALLAS Y A LA MEDICIÓN DE
PARÁMETROS EN REDES DE COMUNICACIÓN
T
E
S
I
S
QUE PARA OBTENER EL GRADO DE:
MAESTRO EN CIENCIAS EN
INGENIERÍA ELECTRÓNICA
P
R
E
S
E
N
T
A
:
ISRAEL LEYRANA CEBALLOS
DIRECTOR:
M.C. JOSÉ MARTÍN GOMÉZ LÓPEZ;
CO-DIRECTOR:
M.C. GUILLERMO CAHUE DIAZ
CUERNAVACA, MOR.
ABRIL 2005
Resumen
Las redes de comunicación alambradas han extendido su uso debido al creciente
empleo de la Internet lo cual demanda que el cableado de la red se encuentre siempre en
óptimas condiciones. Toda estructura de cableado real tiene pérdidas propias por la
naturaleza de los conductores, por el tipo de aislante, etc., a ello hay que añadirle la
posibilidad de que ocurran fallas debido a problemas físicos en la instalación, a factores de
carácter ambiental o a fallas en los equipos que se propagan hasta la red y la colapsan. Es
este contexto es común encontrar fallas en el cableado tales como: cables rotos o en corto,
empalmes en los conductores, interferencia mutua excesiva entre conductores y
configuraciones incorrectas en los conectores. Su detección requiere de herramientas
confiables, la Reflectometría en el Dominio del Tiempo (RDT) es una técnica utilizada con
éxito para éste propósito
En el trabajo que se reporta, se describen los elementos de un sistema electrónico
autónomo basado en microcontrolador que se desarrolló para detectar fallas en cable de red
mediante la técnica de RDT. Este desarrollo consiste de un módulo electrónico que realiza
funciones de inyección de señales de alta frecuencia en el cableado bajo prueba y mide la
respuesta por medio de un submódulo de adquisición de datos. Esta señal de retorno es una
fracción de la señal inyectada e indica que existen cambios de impedancia en el cableado
producto de probables anomalías en él. El análisis de esta información se realiza en el
sistema y lleva a determinar el estado del cableado. La programación es una parte relevante
del módulo y la filosofía de operación desarrollada es modular y se basa en el empleo de
pequeños subprogramas (drivers o controladores) que coordinan y maneja los distintos
submódulos del sistema, dotándolo de flexibilidad, escalabilidad y portabilidad. Ello abre la
posibilidad a reutilizar parte de la infraestructura desarrollada (Hardware y software) en
aplicaciones similares.
También se presentan las pruebas que se realizaron para caracterizar las señales y sus
formas de onda. Los resultados del trabajo demuestran la bondad de la técnica RDT para
solucionar este tipo de aplicaciones. El uso de esta herramienta podría extenderse a la
Detección de derivaciones en cableados de la red eléctrica o detección de fallas en
cables de fibra óptica, entre otras aplicaciones.
Abstract
The communication networks wire fences have extended their use due to the
increasing use of the Internet which demand that the wiring of the network always is in
optimal conditions. All structure of real wiring has own losses by the nature of the
conductors, the type of insulator, etc., to it is necessary to add the possibility to him that
faults due to physical problems in the installation happen, to factors of environmental
character or to faults in the equipment that propagates until the network and they colapsan
it. It is east context is common to find faults in the wiring such as: broken cables or in
short, joints in the conductors, excessive mutual interference between conductors and
incorrect configurations in the connectors. Its detection requires of reliable tools, the Time
Domain Reflectometry (TDR) is a technique used successfully for this one intention.
In the work that is reported, describe the elements of an independent electronic
system based on microcontroller who was developed to detect cable faults of network by
means of the TDR technique. This development consists of an electronic module that
makes functions of injection of signals of high frequency in the wiring under test and
measures the answer by means of a submodule of data acquisition. This signal of return is
a fraction of the injected signal and indicates that changes of impedance in the wiring exist
product of probable anomalies in him. The analysis of this information is made in the
system and takes to determine the state of the wiring. The programming is an excellent part
of the module and the philosophy of developed operation is to modulate and it is based on
the use of small subprograms (drivers or controller) that they coordinate and handles the
different submodules from the system, equipping it with flexibility, scalability and
portability. It opens the possibility to reuse part of the infrastructure developed (Hardware
and software) in similar applications.
Also the tests appear that were made to characterize the signals and their waveform.
The results of the work demonstrate the kindness of technique TDR to solve this type of
applications. The use of this tool could extend to the Detection of derivations in wirings of
the mains or detection of optical fiber cable faults, among other applications.
Tabla de Contenido
Índice de Figuras ......................................................................... vii
Índice de Tablas........................................................................... ix
CAPITULO 1 INTRODUCCIÓN .................................................... 1
1.1 Antecedentes.......................................................................................... 1
1.1.1 Problemática de Estudio .......................................................... 1
1.1.2 Objetivo ..................................................................................... 2
1.1.3 La RDT como instrumento de prueba .................................... 2
1.2 La técnica de Reflectometría en el Dominio del Tiempo..................... 5
1.3 Marco conceptual ................................................................................... 6
1.3.1 Conceptos básicos sobre líneas de transmisión.................. 6
1.3.2 Características de las ondas electromagnéticas ................... 7
1.3.3 Circuito equivalente de la línea de transmisión ..................... 8
1.3.4 Factor de velocidad .................................................................. 13
1.3.5 Cálculo de la Señal de Retrodispersión.................................. 14
1.3.6. Reflectometría en el Dominio del Tiempo.............................. 15
1.4 Propiedad de un cuarto de longitud de onda ...................................... 18
1.5 Propuesta para el módulo RDT ............................................................. 20
CAPITULO 2 ESPECIFICACIÓN DEL MÓDULO RDT ................ 23
2.1 Filosofía funcional.................................................................................. 23
2.2 Arquitectura del sistema........................................................................ 24
2.2.1 El dispositivo probador............................................................ 24
2.2.2 Módulo auxiliar de prueba. ...................................................... 28
iii
2.2.3 Interfaz hombre/máquina. ........................................................ 28
CAPITULO 3 DISEÑO DE HARDWARE ...................................... 30
3.1 Introducción............................................................................................ 30
3.2 Descripción Modular Del RDT ............................................................... 32
3.2.1 Unidad de procesamiento ........................................................ 33
3.2.1.1. Generador de pulsos. .............................................................37
3.2.1.2. Despliegue de información ....................................................39
3.2.1.3. Memoria..................................................................................41
3.2.1.4 Interfase serial (SCI, serial communication interface)........ 41
3.2.1.5 Detector de Pulsos ................................................................... 42
3.2.1.6 Control de Conmutación de señal. ........................................44
3.2.2. Adquisición de datos............................................................... 45
3.2.3. Multiplexeo de señal................................................................ 47
3.2.4 Módulo auxiliar.......................................................................... 49
3.3 Diseño del PCB....................................................................................... 49
3.4 Conclusiones.......................................................................................... 51
CAPITULO 4 DISEÑO DE SOFTWARE ....................................... 53
4.1 Introducción............................................................................................ 53
4.2 Programa principal................................................................................. 55
4.3 Diseño de controladores ....................................................................... 56
4.3.1 Inicialización de programa....................................................... 58
4.3.2 Controladores de periféricos ................................................... 59
4.3.2.1 SWITCH.H ..............................................................................59
4.3.2.2 GENERADOR.H ....................................................................59
iv
4.3.2.3 DETECTOR.H ........................................................................ 60
4.3.2.4 SERIAL.H................................................................................61
4.3.2.5 INTERFAZ.H..........................................................................62
4.3.2.6 ADQUISICION.H................................................................... 63
4.4.3 Controlador de eventos de usuario......................................... 64
4.4 Conclusiones.......................................................................................... 65
CAPITULO 5 PRUEBAS Y RESULTADOS.................................. 67
5.1 Introducción............................................................................................ 67
5.2 Caracterización de la señal RDT ........................................................... 67
5.3 Pruebas de caracterización de señal RDT ........................................... 69
5.3.1 Condiciones de prueba ............................................................ 69
5.3.2 Resultados de la caracterización ............................................ 71
5.3.2.1 Cable de 5 metros.................................................................... 71
5.3.2.2 Cable de 7 metros.................................................................... 72
5.3.2.3 Cable de 10 metros.................................................................. 73
5.3.2.4 Cable de 25 metros.................................................................. 74
5.3.2.5 Pruebas con derivación...........................................................75
5.4 Conclusiones ......................................................................................... 77
CAPITULO 6 CONCLUSIONES ................................................... 79
6.1 Importancia de la Reflectometría en el Dominio del Tiempo.............. 79
6.2 Hardware ................................................................................................. 80
6.3 Software .................................................................................................. 81
6.4 Pruebas y resultados ............................................................................. 82
6.5 Aportación del trabajo ........................................................................... 82
v
6.6 Trabajos futuros ..................................................................................... 83
Apéndice A: Simbología y Abreviaciones ................................. 85
Apéndice B: Bibliografía ............................................................. 86
Apéndice C: Vistas Preliminares del PCB ................................. 88
C.1 Top layer................................................................................................. 88
C.2 Bottom layer........................................................................................... 89
C.3 Top Overlay ............................................................................................ 90
C.4 Drill Guide............................................................................................... 91
C.5 Top paste mask...................................................................................... 92
C.6 Bottom paste mask................................................................................ 93
Apéndice D: Lista de Materiales................................................. 94
Apéndice E: Especificaciones del microcontrolador MC9S12A128
....................................................................................................... 96
vi
Índice de Figuras
1.1 Distintos tipos de fallas en cables de red...........................................................3
1.2 Puertos Ethernet conectados..............................................................................4
1.3 Operación básica del radar ................................................................................5
1.4 Operación básica del RDT en cables de red .....................................................5
1.5 Línea de transmisión de dos conductores ..........................................................7
1.6 Modelo de una línea de transmisión ..................................................................9
1.7 a) tiempo transcurrido, b) transmisión de un pulso ancho.................................17
1.8 Modelo de una línea de Transmisión para la propiedad de un cuarto de
longitud de onda ...............................................................................................18
1.9 Circuito Propuesto por Medelius.......................................................................20
1.10 Principio de Operación del RDT .......................................................................21
1.11 RDT Propuesto ..................................................................................................22
2.1 Diagrama a bloques funcional del módulo propuesto .......................................24
2.2 Diagrama funcional del módulo de procesamiento ...........................................25
2.3 Diagrama funcional del generador de pulsos ....................................................26
2.4 Diagrama funcional del detector de pulsos........................................................26
2.5 Adquisición de datos .........................................................................................27
2.6 Diagrama funcional del control de comunicaciones..........................................27
2.7 Diagrama funcional del control de Interfaz.......................................................27
2.8 Diagrama funcional del módulo auxiliar ...........................................................28
3.1 Diagrama a bloques del módulo RDT ...............................................................33
3.2 Diagrama funcional del bloque CPU.................................................................35
3.3 Diagrama eléctrico del bloque CPU ..................................................................36
3.4 Diagrama funcional del generador de pulsos ....................................................37
3.5 Diagrama eléctrico del generador de pulsos......................................................38
3.6 Diagrama funcional del módulo de interfase.....................................................39
3.7 Diagrama eléctrico de la interfaz de usuario y puerto serie ..............................40
3.8 Diagrama funcional del detector de pulsos........................................................42
vii
3.9 Diagrama eléctrico del detector de pulsos.........................................................43
3.10 Diagrama funcional del módulo de conmutación..............................................44
3.11 Diagrama funcional del módulo de adquisición ................................................45
3.12 Diagrama eléctrico del módulo de adquisición .................................................46
3.13 Diagrama eléctrico del módulo de conmutación ...............................................48
3.14 PCB final, imagen 3D generada por el Protel 99SE..........................................50
4.1 Arquitectura del sistema RDT ............................................................................54
4.2 Módulos de software ..........................................................................................56
4.3 Diagrama de flujo ...............................................................................................57
4.4 Distintos niveles del menú de usuario ................................................................62
4.5 Flujo de llamada a los controladores por los eventos.........................................66
5.1 Diagrama del generador......................................................................................68
5.2 Prueba de fallas más comunes ............................................................................69
5.3 Configuración general de prueba........................................................................70
5.4 Señales para cable de 5m; 2V/div, 50 ns/div......................................................72
5.5 Señales para cable de 7m; a) y b) 1 V/div, 200 ns/div; c) 2 V/div, 100 ns/div. .73
5.6 Señales para cable de 10m; a) y b) 1 V/div, 100 ns/div, c) 2 V/div, 100 ns/div 74
5.7 Señales para cable de 25 metros; a) y b) 1 V/div, 100 ns/div, c) 2 V/div,
100 ns/div. ........................................................................................................75
5.8 a) Terminación abierta y derivación abierta b) terminación cerrada y derivación
abierta; 1 V/div, 50 ns/div.. ..............................................................................76
5.9 Terminación cerrada y derivación cerrada; 1 V/div, 50 ns/div.. .......................76
5.10 Terminación abierta y derivación cerrada; 1 V/div, 50 ns/div. .........................77
viii
Índice de Tablas
3.1 Convertidores Analógico-Digitales rápidos ......................................................31
3.2 Convertidores Analógicos-Digitales de gama media ........................................31
3.3 Convertidores Analógico-Digitales de gama media. Continuación. .................32
ix
Capítulo 1
Introducción
Capítulo 1 Introducción
1.1 Antecedentes
1.1.1 Problemática de estudio
En los Estados Unidos la mayoría de los adultos tiene trabajos de oficina con una
rápida conexión a internet, esto provoca que sea inaceptable para ellos el uso de
conexiones lentas en sus hogares, como lo son las conexiones vía módem [4]. Las casas
tienden a ser cada vez más como oficinas [3].
Cada vez es más común encontrar sistemas centralizados para el control de
alarmas, seguridad y por supuesto el acceso a internet.
Todos estos servicios provocan que los usuarios requieran excelentes condiciones
en el desempeño de su red.
Un sistema de cableado metálico real siempre tendrá pérdidas propias de la
naturaleza de los conductores, tipo de aislante, etc. En el caso del cableado estructurado
para redes de computadoras, se han establecido estándares para la operación óptima de
esta, así como para asegurar la integridad de los datos.
Los requerimientos de confiabilidad en la instalación física hacen necesario que se
desarrollen herramientas de diagnóstico para el análisis de confiabilidad en el cableado.
1
Capítulo 1
Introducción
Estas herramientas pueden consistir en instrumentos tan sencillos como un
multímetro digital o analógico, hasta algunos más complicados como osciloscopios,
espectómetros, etc.
Entre estos encontramos los Reflectómetros en el dominio del tiempo, los cuales
son instrumentos que nos permiten hacer mediciones con mucha exactitud de los
principales parámetros de un sistema de cableado metálico. Esto lo hacen mediante la
técnica de reflectometría en el dominio del tiempo (RDT).
1.1.2 Objetivo
El presente trabajo tiene como objetivo general el diseño e implementación de un
dispositivo autónomo basado en la técnica de RDT, aplicado a la detección de fallas en el
cableado UTP nivel 5. Así como la interfaz hombre-máquina para la conexión PCmódulo RDT.
El alcance del proyecto consiste de los siguientes puntos:
Asimilación de la base analítica de la técnica de la Reflectometría en el Dominio
del Tiempo y su aplicación a la detección de cambios de impedancia y caracterización de
parámetros eléctricos relacionados con la transmisión de señales en conductores
Diseño, construcción y prueba del prototipo electrónico de un medidor de
parámetros de cableado basado en RDT.
Desarrollo de la interfaz hombre-máquina para control, análisis y despliegue de
resultados de prueba.
Caracterización de parámetros de cableado y localización de fallas utilizando el
módulo desarrollado.
Documentación del trabajo en la edición de la tesis.
1.1.3 La RDT como instrumento de prueba
En las redes de computadoras la RDT es una de las formas más confiables y
exactas de calificar el cableado de cobre y fibra óptica. Conforme las redes de área local
proliferan, la RDT empieza a volverse el método estándar para la verificación y
2
Capítulo 1
Introducción
mantenimiento de la estructura de cableado [6]. El cableado en las redes de hoy envuelve
una topología compleja de conectores, tomas y terminadores. Esta misma complejidad
ocasiona que se presenten amplias posibilidades de sufrir distintos tipos de fallas tales
como: aberturas, cortos, falsas terminaciones, desgaste, amarres, torceduras, etc. Lo cual
causa mal funcionamiento en la red y el costo por perdida de tiempo [5].
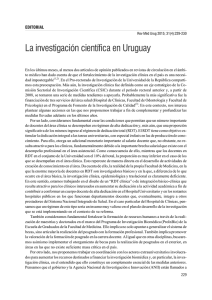
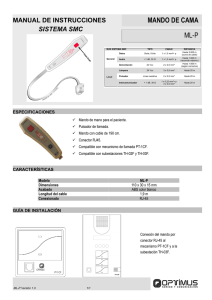
Algunas veces el cable contiene más de una falla. Múltiples fallas en el cable son
causadas por roedores, una instalación inapropiada, por construcción, cambio de tierra o
algún daño estructural en el proceso de manufactura. La Figura 1.1 nos muestra los tipos
de fallas más comunes.
Figura 1.1 Distintos tipos de fallas en cables de red.
Actualmente el cableado estructurado en categoría 5 es el tipo de cableado más
solicitado, esto es debido al incremento en las redes caseras y de la PyME (Pequeña y
Mediana Empresa) [6].
3
Capítulo 1
Introducción
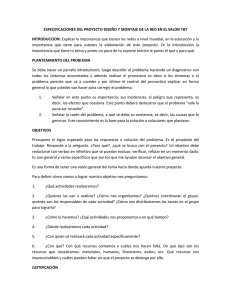
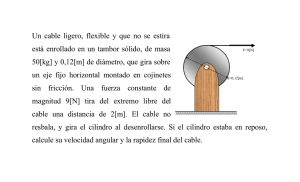
La Figura 1.2 Puertos Ethernet conectados.nos muestra la supremacía del
cableado UTP nivel 5 (100 Mbps) y su crecimiento futuro en relación a los nuevos
estándares de cableado estructurado [7]. Compañías de expertos como Parks Associates
en Dallas e International Data Corporation (IDC), creen que el crecimiento del cableado
UTP será exponencial en los siguientes años. Esto debido a un incremento del 37% en
ventas de PC´s en el año 2000, especialmente para consumidores caseros, tan sólo en los
U.S. [8].
Por otro lado el costo de migración a otras tecnologías de cableado de red, como
lo es la fibra óptica, todavía representa un alto costo para las empresas que su estructura
de red está basada en el alambre de cobre. Más del 60% de los edificios corporativos
hasta 1997 están cableados con la categoría 5, por lo que resulta mas barato utilizar el
cableado existente para los nuevos estándares de red, ya que estos generalmente son
compatibles con la categoría 5. [18]
La Reflectometría en el Dominio del Tiempo aunque es una forma conveniente
de probar el cableado, aunque aún es caro el costo de los instrumentos que la utilizan,
incluso hay quienes rentan los equipos, sin embargo a la larga, esto puede significar un
alto costo [9].
Figura 1.2 Puertos Ethernet conectados.
4
Capítulo 1
Introducción
1.2 La técnica de reflectometría en el dominio del tiempo
La Reflectometría en el Dominio del Tiempo (RDT), es una técnica de medición
eléctrica que originalmente se usó para localizar rupturas en cables de transmisión de
potencia, y la localización espacial y naturaleza de algunos objetos. Una primera forma
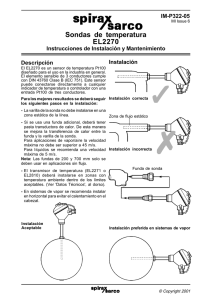
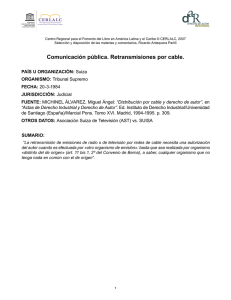
de RDT fue el radar, el cual se desarrolló por allá de los años 30´s[10]. Este consiste de:
Un transmisor, el cual emite un pulso corto de microondas; una antena direccionable; y
un radio receptor sensible. La forma en que se hace la medición es de la siguiente forma:
(i)medir el tiempo entre el envío de la onda electromagnética y la detección de la señal,
(ii) medir la amplitud de la reflexión, (iii) determinando la dirección de la reflexión y la
velocidad de propagación de la onda se puede establecer el tamaño y posición del objeto
que causó la reflexión[11].
Figura 1.3 Operación básica del radar.
En aplicaciones de cableado metálico la RDT transmite un pulso de energía sobre
el conductor. Cuando ese pulso alcanza el extremo del cable, o se encuentra un cambio en
la impedancia característica del cable, parte o toda la energía del pulso se refleja con un
retardo al instrumento RDT. Ver Figura 1.4.
Figura 1.4 Operación básica del RDT en cables de red.
5
Capítulo 1
Introducción
El RDT mide el tiempo que le toma a la señal viajar por el cable, ve el cambio
en Zo, y lo refleja de regreso a la fuente. Históricamente la RDT ha sido reservada sólo
para compañías grandes y la ingeniería de alto nivel. Esto se debe a la complejidad de
funcionamiento y al elevado costo de los instrumentos. Algunas compañías como RiserBond Instruments reconocieron estas limitaciones y desarrollaron los primeros RDT a
principios de los 80’s.
Gracias a los adelantos en la tecnología de hoy, el funcionamiento e
interpretación de un RDT se ha simplificado grandemente. Debido a su habilidad de
identificar los problemas del cableado, el RDT está recobrando ahora rápidamente la
popularidad en la industria de las comunicaciones[12].
Si un cable es metálico y tiene dos conductores por lo menos, puede probarse con
un RDT. Esto es especialmente cierto, si hablamos de redes de computadoras, donde el
estándar TIA 568 A/B esta dirigido a cables de par trenzado de 8 hilos. En las
comunicaciones la RDT es ampliamente utilizada para localizar e identificar fallas en el
cable.
LA RDT se ha utilizado ampliamente también en aplicaciones geotécnicas, para el
monitorio de las deformaciones en grandes masas de roca, en una gran variedad de
mediciones de cambios geométricos, en medidas de nivel de agua, presión de agua y
cambios de humedad[13].
1.3 Marco conceptual
1.3.1 Conceptos básicos sobre líneas de transmisión
Una línea de transmisión (L.T.) es un sistema conductor metálico que se utiliza
para transmitir señales eléctricas de un lugar a otro. Más específicamente una línea de
transmisión son dos o más conductores separados por un aislante, inclusive el aire, como
un par de cables o un sistema de par de hilos [14].
La propagación de energía eléctrica a lo largo de la línea de transmisión ocurre en
forma de ondas electromagnéticas transversales (TEM). Una onda es un movimiento
oscilatorio. Una onda TEM se propaga principalmente en un no conductor (dieléctrico)
6
Capítulo 1
Introducción
que separa los dos conductores de una línea de transmisión. Para una onda transversal, la
dirección de desplazamiento es perpendicular a la dirección de propagación, a esto se le
llama onda longitudinal. Una onda electromagnética (EM), se produce por la aceleración
de una carga eléctrica. En un conductor, la corriente y el voltaje siempre están
acompañados por un campo eléctrico (E) y un campo magnético (H), en la región de
espacio colindante. Los campos E y H son perpendiculares, a esto se le conoce como
cuadratura del espacio. Las ondas electromagnéticas que viajan a lo largo de una línea de
transmisión, desde la fuente a la carga, se llaman ondas incidentes, y aquellas que viajan
desde la carga nuevamente hacia la fuente se le llaman ondas reflejadas. La Figura 1.5
muestra una línea de transmisión paralela de dos conductores.
Figura 1.5 Línea de transmisión de dos conductores.
1.3.2 Características de las ondas electromagnéticas
¾ Velocidad de onda: Las ondas viajan a distintas velocidades,
dependiendo del tipo de onda y de las característica del medio de
propagación.
¾ Frecuencia y longitud
de onda: Las oscilaciones de una onda
electromagnética son periódicas y repetitivas. Por lo tanto, se caracterizan
7
Capítulo 1
Introducción
por una frecuencia. La proporción en la que la onda periódica se repite es
su frecuencia. La distancia de un ciclo ocurriendo en el espacio se llama
longitud de onda y se determina por la siguiente ecuación fundamental:
Distancia = velocidad x tiempo
(1)
Si el tiempo para un ciclo se sustituye por el periodo de la onda en la ecuación
(1), obtenemos la longitud de un ciclo, que se llama longitud de onda (λ)
λ= v x T
(1)
Donde v, es la velocidad de la onda en el medio y T es el período de la onda.
Y ya que
T= 1/f,
λ=
(2)
v
f
(3)
Para la propagación en el espacio libre, v=c; donde c es la velocidad de la luz en
el vacío cuyo valor es 3x108 m/s, por lo tanto, la longitud de onda de un ciclo es
λ=
c
f
(4)
1.3.3 Circuito equivalente de la línea de transmisión
Líneas distribuidas uniformemente
Debido a que los cables en una L.T. no pueden ser conductores ideales, ellos
tienen una resistencia de valor finito. Esta resistencia/conductancia está determinada por
la longitud del cable y el área de la sección transversal. Algunos modelos de L.T. poseen
una resistencia en serie, que representa la conductividad de los cables. Es conveniente
establecer la resistencia en unidades por longitud.
De la misma forma, el medio de separación de los cables no está perfectamente
aislado, por lo que existen pequeñas corrientes de fuga, estas corrientes de fuga pueden
generar conductancias [15].
8
Capítulo 1
Introducción
Las características de una línea de transmisión se determinan por sus propiedades
eléctricas, como la conductancia de los cables y la constante dieléctrica del aislante, y sus
propiedades físicas, como el diámetro del cable y los espacios del conductor.
Estas propiedades determinan a su vez las constantes eléctricas primarias:
¾ Resistencia de cd en serie (R),
¾ Inductancia en serie (L),
¾ Capacitancia de derivación (C), y
¾ Conductancia de derivación (G).
La resistencia y la inductancia ocurren a lo largo de la línea, mientras que entre
los dos conductores ocurren la capacitancia y conductancia.
Figura 1.6. Modelo de una línea de transmisión [17].
Características de la transmisión
Las características de una línea de transmisión se llaman constantes secundarias y
se determinan con las cuatro constantes primarias. Las constantes secundarias son
impedancia característica y constante de propagación.
9
Capítulo 1
Introducción
Impedancia característica. Para una máxima transferencia de potencia, desde la
fuente a la carga (o sea, sin energía reflejada), una línea de transmisión debe terminarse
en una carga puramente resistiva igual a la impedancia característica de la línea. La
impedancia característica (Zo), de una línea de transmisión es una cantidad compleja que
se expresa en ohms, que idealmente es independiente de la longitud de la línea, y que no
puede medirse. Se define como la impedancia que se ve desde una línea infinitamente
larga o la impedancia que se ve desde el largo finito de una línea que se termina en una
carga totalmente resistiva igual a la impedancia característica de la línea. Una línea de
transmisión almacena energía en su inductancia y capacitancia distribuida. Si la línea es
infinitamente larga, puede almacenar energía indefinidamente; está entrando energía
desde la fuente y ninguna se regresa. Por lo tanto, la línea actúa como un resistor que
disipa toda la energía. Se puede simular una línea infinita si se termina una línea finita
con una carga resistiva igual a Zo; toda la energía que entra a la línea desde la fuente se
disipa en la carga (esto supone una línea totalmente sin pérdidas).
La Figura 1.6 muestra una sola sección de una línea de transmisión
terminada en una carga ZL que es igual a Zo. La impedancia que ve desde una línea de n
secciones sucesivas se determina de la siguiente expresión:
Z 0 = Z1Z 2 +
2
ZL
n
2
(5)
En donde n es el número de secciones. Para un número infinito de secciones Z L2 /n
se acerca a 0 si
lim
Z L2
n → ∞ = 0 Entonces
n
(5)
Zo = Z1 Z 2
(7)
En donde
10
Capítulo 1
Introducción
Z 1 = R + jwL
(8)
Y2 =
1
1
1
=
+
= G + jwC
Z 2 R s 1 / jwC
(9)
Z2 =
1
G + jwC
(10)
Por lo tanto,
Z 0 = ( R + jwL)
Z0 =
1
,o
G + jwC
(11)
R + jwL
G + jwC
(12)
Particularmente, si se consideran frecuencias suficientemente altas
ω
⟩100 Khz la ec. (12) se simplifica a; [16]
2π
Z0 =
jwL
L
=
jwC
C
(13)
Para frecuencias bajas, en el rango
Z0 =
R
G
ω
≅ 1KHz (12) se simplifica a [17]:
2π
(14)
Puede verse de la ecuación (13) que para frecuencias mayores a 100 Khz, la
impedancia característica en una línea de transmisión se acerca a una constante, es
independiente de la frecuencia y longitud, y se determina sólo por la inductancia y
capacitancia. También puede verse que el ángulo de fase es de 0o. Por lo tanto Zo se ve
totalmente resistiva y toda la energía incidente se absorberá por la línea.
11
Capítulo 1
Introducción
Constante de propagación. La constante de propagación (a veces llamada el
coeficiente de propagación) se utiliza para expresar la atenuación (pérdida de la señal) y
el desplazamiento de fase por unidad de longitud de una línea de transmisión. Conforme
se propaga una onda, a lo largo de la línea de transmisión, su amplitud se reduce con la
distancia viajada. La constante de propagación se utiliza para determinar la reducción en
voltaje o corriente en la distancia conforme la TEM se propaga a lo largo de la línea de
transmisión. Para una línea infinitamente larga, toda la potencia incidente se disipa en la
resistencia del cable, conforme la onda se propague a lo largo de la línea. Por lo tanto,
una línea que se ve como infinitamente larga, y que termina en una carga acoplada
(Zo=ZL), no se refleja ni se regresa energía nuevamente a la fuente. Matemáticamente, la
constante de propagación es
γ = α + jβ
(15)
En donde γ= constante de propagación
α= coeficiente de atenuación (nepers por unidad de longitud)
β=coeficiente de desplazamiento de fase (radianes por unidad de longitud)
La constante de propagación es una unidad compleja definida por
γ = ( R + jwL )(G + jwC )
(16)
Ya que un desplazamiento de fase de 2π rad ocurre sobre una distancia de una
longitud de onda,
β=
2π
(17)
λ
A frecuencias de radio e intermedias, wL>R y wC>G; por lo tanto
α=
R
GZ 0
+
2Z 0
2 [18]
(18)
Y
β = w LC
[19]
(19)
12
Capítulo 1
Introducción
Como se indicó anteriormente, las ondas electromagnéticas viajan a la velocidad
de la luz. Sin embargo, en las líneas de transmisión metálica donde el conductor
generalmente es de cobre y los materiales dieléctricos varían, considerablemente, de
acuerdo con el tipo de cable, una onda electromagnética viaja mucho más lenta.
1.3.4 Factor de velocidad
Los instrumentos que usan la RDT miden el tiempo entre el envío del pulso y la
recepción de la señal. Este tiempo es convertido a distancia usando una conversión
conocida como factor de velocidad [20] se define simplemente como la relación de la
velocidad real de propagación, a través de un medio determinado a la velocidad de
propagación a través del espacio libre. Matemáticamente, el factor de velocidad es
Vf =
Vp
(20)
c
En donde
Vf = factor de velocidad
Vp =velocidad real de propagación
c =velocidad de propagación a través del espacio libre, c=3 x 108 m/s y
V f xc = V p
(21)
La velocidad a la que viaja una onda electromagnética, en una línea de
transmisión, depende de la constante dieléctrica del material aislante que separa los dos
conductores. El factor de velocidad se puede obtener, aproximadamente, con la fórmula
Vf =
1
(22)
εr
En donde εr es la constante dieléctrica de un material determinado (permeabilidad
del material relativo a la permeabilidad del vacío, la relación ε/εo).
Se puede demostrar que el tiempo T = LC . Por lo tanto, la inductancia, la
capacitancia, y la velocidad de propagación están relacionadas matemáticamente por la
fórmula.
13
Capítulo 1
Vp =
Introducción
D
LC
(23)
Si la normalizamos a un metro, la velocidad de propagación para una línea sin
pérdidas es
Vp =
1m
=
LC
1
m/s
LC
(23)
1.3.5. Calculo de la Señal de Retrodispersión
Para determina la ecuación matemática de la señal de retrodispersón, primero, se
analiza la energía de la luz presente en una pequeña sección del conductor, se considera
la difusión de la señal en esa sección, y se determina la potencia dispersada en sentido
contrario al flujo de la señal, y finalmente se define la ecuación de retrodispersión en
función del tiempo.
Dada una señal con energía Eo inyectado en el conductor en el tiempo t=0 al
punto x=0. La energía del pulso Ei(x) a la distancia x es:
x
Ei( x) = Eo exp{− ∫ α ' (l )d ¨l}
(24)
0
Donde α ' (l ) es la atenuación del conductor en el punto l en el sentido en que
viaja el pulso. Si consideramos que α (l ) es constante entonces:
Ei ( x) = Eo exp(−α ' x)
(25)
Ahora, considerando la difusión de la señal en x, x+dx,
x
dEd ( x) = Eoα d ( x) exp{− ∫ α ' (l )d (l )}dx
(26)
0
Donde α d (x) es el coeficiente de dispersión al punto x, ésta dispersión es debida
principalmente a irregularidades geométricas e inhomogeneidades propias de la
construcción del material. La porción de la potencia dispersada que será capaz de
retrodispersarse, está dad por la fracción de potencia de captura S(x).
14
Capítulo 1
Introducción
x
dEd ( x) = EoS ( x)α d ( x) exp{− ∫ α ' (l )d (l )}dx
(27)
0
Si se observa la energía en la entrada del conductor se tiene:
x
x
0
0
dEd ( x) = EoS ( x)α d ( x) exp´− ∫ α ' (l )d (l ) − ∫ α ' ' (l )d (l )}dx
(28)
Donde α ' ' (l ) es la atenuación de retorno.
Para el caso práctico donde α ' (l ) = α ' ' (l ) = α = cte tenemos:
dE ( x) = EoSα d exp(−2αx)dx
(29)
Haciendo cambios de variable de E y x, se obtiene la potencia de la señal de
retrodispersión como función del tiempo.
Eo = Po∆t
(30)
Donde ∆t = ancho del pulso inyectado.
2 x = Vg t
dx =
Vg
2
(31)
(32)
dt
Vg = velocidad de grupo, o propagación.
P (t ) =
Po∆tα dVg exp( −αVg t )
(33)
2
En esta ecuación se debe notar que:
La potencia retrodispersada es proporcional a:
• La potencia Po en la entrada.
• El ancho del pulso ∆t .
• Los parámetros del conductor S, α d . [21]
1.3.6. Reflectometría en el dominio del tiempo
Los cables metálicos, como todos los componentes, dentro de un sistema de
comunicación electrónica, pueden desarrollar problemas que inhiben su habilidad de
funcionar como se espera. Cuando ocurre un problema con un cable, puede consumirse
15
Capítulo 1
Introducción
mucho tiempo y, en consecuencia, puede ser bastante costoso, para determinar el tipo y el
lugar exacto donde ocurre el problema.
Una técnica que puede utilizarse para localizar el deterioro de un cable metálico se
llama reflectometría en el dominio del tiempo (RDT). Con la RDT, los deterioros en la
línea de transmisión pueden localizarse en una radio de algunos metros hasta distancias
de varios kilómetros. RDT hace uso de la teoría, bien establecida, que dice que el
deterioro de las líneas de transmisión, con cortos y abiertos, hacen que una porción de la
señal incidente regrese a la fuente. Cuánto regresa, depende del tipo y de la magnitud del
deterioro. El punto en la línea donde el deterioro se localiza representa una
discontinuidad de la señal. Esta discontinuidad hace que una parte de la señal transmitida
sea reflejada, en lugar de que continúe a lo largo del cable. Si no regresa la energía (o sea,
que la línea de transmisión y la carga están perfectamente acopladas), la línea está
infinitamente larga o está terminada en una carga puramente resistiva con una impedancia
igual a la impedancia característica de la línea. RDT opera de forma similar a un radar.
Un pulso de corta duración con un rápido tiempo de elevación se propaga a lo largo del
cable; luego se mide el tiempo para que una porción de esa señal regrese a la fuente. Esta
señal de retorno se llama, a veces eco. Conociendo la velocidad de propagación en el
cable, puede determinarse la distancia exacta entre el deterioro y la fuente utilizando la
siguiente relación matemática:
d=
v *t
2
(34)
En donde
d= distancia de la discontinuidad (metros)
v=velocidad (metros/segundo)
v=k x c (metros/segundo)
k= factor de velocidad (v/c)
c= velocidad de la luz (3 x 108 metros/segundo)
t=tiempo transcurrido (segundos)
16
Capítulo 1
Introducción
La ecuación (34) es una simplificación de la ecuación de retrodispersión (32) en
donde se considera un punto diferencial en el conductor. La ec. (34) nos proporciona una
buena aproximación para fines prácticos para el cálculo de la señal retrodispersada o de
retorno.
En la ec. (34) tiempo transcurrido se mide del borde delantero del pulso
transmitido a la recepción de la señal reflejada, como se muestra en la Figura 1.7a. Es
importante que el pulso transmitido sea tan angosto como sea posible, esta medida es
dependiente de la precisión requerida en la medición. . De otra forma, cuando se localice
el deterioro cerca de la fuente, la señal reflejada podría regresarse, mientras que el pulso
se esté transmitiendo todavía (ver Figura 1.7b), dificultando su detección.
Figura 1.7 a) tiempo transcurrido, b) transmisión de un pulso ancho
Considerando la ecuación 18, podemos ver que mientras la distancia que recorra
el pulso sea más corta, el pulso a de ser mas angosto. En otras palabras si queremos hacer
17
Capítulo 1
Introducción
una medición de una longitud de 10 metros, idealmente necesitamos un pulso cuando
menos de 45 Mhz, para que el pulso de regreso este espaciado un ciclo por el pulso
enviado y de esta forma no se traslapen los pulsos. La aplicación es la que determinará el
tamaño máximo del pulso.
1.4 Propiedad de un cuarto de longitud de onda
Esta propiedad nos dice lo siguiente: Si una terminación de una línea de
transmisión está a un cuarto de longitud de onda y está en corto circuito, entonces la línea
de transmisión presenta una impedancia infinita para el caso ideal (o muy grande en la
práctica) para cualquier equipo que esté conectado en la otra terminal. Si una terminal
está en circuito abierto, entonces la línea de transmisión presenta una impedancia cero
para el caso ideal (muy baja en la práctica) para cualquier equipo que esté conectado en la
otra terminal. [20]
Para los dos casos las formas de ondas reflejadas de voltaje y corriente están en
fase cuando alcanzan la terminación de fuente. Esto hace que la impedancia presente un
comportamiento puramente resistivo, esto se demuestra por medio del análisis fasorial
[17].
Rref
Rref
R2
L2
L1
V1
I1
R1
C2
a) Circuito resonante paralelo
C3
b) Circuito resonante serie
Figura 1.8 Modelo de línea de transmisión para la propiedad de un cuarto de
longitud de onda.
Para el caso de una línea de transmisión terminada en circuito abierto, el cable se
comporta como un circuito LC resonante serie, y la impedancia de entrada es mínima.
18
Capítulo 1
Introducción
Para el caso de la terminación en corto circuito es equivalente a un circuito LC en
paralelo y la impedancia de entrada es máxima
Línea de transmisión terminada en corto circuito.
En el circuito de la Figura 1.8 parte a) la frecuencia de resonancia está definida
como la frecuencia a la cual la impedancia vista desde la fuente de corriente es puramente
resistiva [19]. Esta frecuencia hace que la correspondiente admitancia sea puramente
conductiva. De esta manera la frecuencia de resonancia es.
ωn =
1
LC
(35)
A esta frecuencia el voltaje entre las terminales de la resistencia R1 es:
→
V 0 (ω = ω n ) = V max = I m R
(36)
De esta manera toda la tensión recae sobre R1, y es máxima por lo que la tensión
en Ref. es cero (o muy cercano a cero), por el divisor de voltaje que se forma
Línea de transmisión terminada en circuito abierto.
En la parte b) de la Figura 1.8 se puede ver el modelo de una línea de transmisión
y como se ve desde la terminal de entrada de fuente, para este caso la frecuencia de
resonancia está definida como la frecuencia a la cual la fuente de voltaje ve al cable como
una carga puramente resistiva, la frecuencia de resonancia es igual que para el caso
anterior [19].
La corriente es máxima, por lo que el voltaje es mínimo, de está manera, la
tensión que se ve en Ref. es cercana o igual al voltaje de fuente, ya que en R1 es cercano
a cero.
De esta manera se justifica el circuito propuesto por Medelius y Simpson [20] el
cual se muestra a continuación:
19
Capítulo 1
Introducción
Figura 1.9 Circuito propuesto por Medelius [20].
1.5 Propuesta para el módulo RDT
Un sistema de cableado metálico real siempre tendrá pérdidas propias de la
naturaleza de los conductores, tipo de aislante, etc. En el caso del cableado estructurado
para redes de computadoras, se han establecido estándares para la operación óptima de
esta, así como para asegurar la integridad de los datos.
Los requerimientos de confiabilidad en la instalación física hacen necesario que se
desarrollen herramientas de diagnóstico para el análisis de confiabilidad en el cableado.
Estas herramientas pueden consistir en instrumentos tan sencillos como un
multímetro digital o analógico, hasta algunos más complicados como osciloscopios,
espectrómetros, etc.
Entre estos encontramos los Reflectómetros en el Dominio del Tiempo (RDT), los
cuales son instrumentos que nos permiten hacer mediciones con mucha exactitud de los
principales parámetros de un sistema de cableado metálico. Esto lo hacen mediante la
técnica de Reflectometría en el Dominio del Tiempo.
Por todo lo anterior se propone el desarrollo de un equipo cuya operación básica
consista en la inyección de un pulso de energía en un extremo del conductor tal que viaje
20
Capítulo 1
Introducción
por él, hasta que encuentre una imperfección o llegue al final del mismo y en cualquiera
de los dos casos genere un eco que viaje de regreso hasta el emisor en donde será
cronometrado el tiempo de envío-recepción y la forma de onda para su análisis y
generación de conclusiones respecto a impedancia, longitud y atenuación, (un RDT).
Figura 1.10 Principio de operación del RDT.
Mediante la técnica de RDT se propone el diseño y construcción de un módulo
electrónico basado en algún tipo de microcontrolador con su circuitería asociada, en este
módulo se capturará toda la información necesaria para el análisis y será enviada a una
computadora personal en donde se tomarán las decisiones respecto a los resultados de las
pruebas y se desplegaran los mismos a través de una interfaz hombre-máquina. La Figura
1.11 muestra la propuesta de este módulo en el ámbito de la aplicación de cableado
estructurado. Debe entenderse por sistema de cableado, a los componentes físicos de la
red, como son: conectores, toma de pared y cables, los cuales conforman la interfaz física
de conexión de una red, y que en nuestro caso de estudio se refiere al alambre de par
trenzado UTP nivel 5.
El diseño consistirá en dos partes perfectamente identificadas:
1. Módulo electrónico que ejecutará las siguientes funciones:
¾ Generación de pulsos
¾ Detección de pulsos
¾ Adquisición de datos
¾ Comunicación serial (RS-232)
21
Capítulo 1
Introducción
¾ Procesamiento
¾ Almacenamiento
¾ Despliegue de información
¾ Autodiagnóstico
2. Interfaz hombre-máquina con las siguientes funciones:
¾ Despliegue
¾ Programación del módulo electrónico
¾ Diagnóstico
¾ Análisis de resultados
¾ Historial
¾ Comunicación
3. Módulo auxiliar con las siguientes funciones:
¾ Facilitar al módulo principal las funciones de detección de fallas en las
pruebas de mapa de cableado y crosstalk.
Figura 1.11 RDT propuesto.
22
Especificación del módulo RDT
Capítulo 2
Capítulo 2 Especificación del módulo RDT
2.1 Filosofía funcional.
El probador de cableado de red es un dispositivo electrónico concebido para
realizar pruebas en cableado categoría 5. Las pruebas consisten en la detección de fallas
en el cable, en la determinación de la longitud del cable y en la caracterización de los
parámetros más significativos del cable de la red como lo son; la atenuación de señales y
Next (crosstalk) adicionalmente el módulo efectúa pruebas denominadas de mapa de
cableado con el propósito de verificar el correcto conexionado de los distintos
conductores de la red. El dispositivo realiza también la prueba de detección de fallas
tales como cortos y abiertos en la red utilizando la técnica de Reflectometría en el
Dominio del Tiempo denominada RDT ó TDR por sus siglas en inglés (Time Domain
Reflectometry).
Los parámetros del cable son verificados insertando también señales digitales de
alta frecuencia en los conductores de red para medir porciones de ellas en los mismos
conductores o en conductores de vecinos, de tal manera, que permitan obtener de éstas
señales información referente al estado del cableado.
Las pruebas de mapa de cableado permiten verificar la correcta interconectividad
entre todos los puntos de la red y es realizada en los extremos de conexión de dos nodos
distintos. El probador efectúa estas pruebas inyectando señales en un extremo de la red y
23
Especificación del módulo RDT
Capítulo 2
monitoreando en los conductores ubicados en el otro extremo para lo cual se auxilia de
un segundo módulo electrónico.
El sistema de prueba se complementa por una computadora personal que permite
programar los parámetros de referencia del cable en el probador y las condiciones de la
prueba, así como llevar historiales de pruebas y generar reportes de las mismas. Lo
anterior se realiza desde una interfaz hombre/máquina.
2.2 Arquitectura del sistema
El sistema de prueba consta de los siguientes elementos:
¾ El dispositivo probador de fallas y caracterizador de parámetros de cableado.
¾ El módulo auxiliar para pruebas de mapa de cableado.
¾ La interfaz hombre/máquina.
¾ El elemento bajo prueba (cable UTP nivel 5). Ver Figura 2.1.
Figura 2.1 Diagrama a bloques funcional del módulo propuesto.
2.2.1 El dispositivo probador
Se integra de los siguientes bloques:
¾ Procesamiento. Realiza las funciones siguientes:
•
Coordinación general de las pruebas.
24
Especificación del módulo RDT
Capítulo 2
•
Programación de los parámetros de la prueba.
•
Procesamiento de resultados de prueba (identificación del tipo de falla,
cálculos de distancia de falla, etc.).
•
Registro de resultados de prueba.
•
Control de la comunicación con la interfaz hombre/máquina.
•
Capacidad para almacenar muestras y resultados de las pruebas.
•
Autodiagnóstico del sistema. Ver Figura 2.2.
Figura 2.2 Diagrama funcional del módulo de procesamiento.
¾ Generador de pulsos. Produce las señales a inyectar a los conductores de la red
bajo prueba, las cuales deben tener las siguientes características:
•
Pulsos cuadrados o senoidales
•
Ancho de pulso de 40 ns mínimo y frecuencia de 60 Khz
•
Señales TTL compatibles
•
Capacidad de corriente suficiente para soportar atenuaciones a una
longitud máxima de 100 mts.
•
Impedancia de salida típica de 100 ohms. Ver Figura 2.3
25
Especificación del módulo RDT
Capítulo 2
Figura 2.3 Diagrama funcional del generador de pulsos.
¾
Detector de pulsos. Detección de señales con las características siguientes:
•
Cambios de señal a 54 ns o mayores.
•
Frecuencia de muestreo de 1/40ns (25 Mhz).
•
Detección de cambios de polaridad de las señales de voltaje. Ver Figura
2.4.
Figura 2.4 Diagrama funcional del detector de pulsos.
¾
Adquisición de datos. Monitorea la forma de onda reflejada de tal forma que
permita determinar los parámetros de la red. Sus principales características son:
•
4 canales de adquisición analógica.
•
Voltaje de entrada de cada canal 0 a 5V.
•
Resolución de 8 bits en cada canal.
•
Frecuencia de muestreo de 125 us. Ver Figura 2.5.
26
Especificación del módulo RDT
Capítulo 2
Figura 2.5 Adquisición de datos.
¾
Comunicaciones. Este bloque realiza las funciones necesarias para enlazar el
dispositivo de prueba con la Interfaz Hombre/Máquina (PC).
Características del enlace:
•
Canal serial RS-232 compatible.
•
Velocidad de enlace 1200 a 9600 bps.
•
Protocolo de enlace propietario. Ver Figura 2.6.
Figura 2.6 Diagrama funcional del control de comunicaciones.
¾
Interfase a usuario. Este bloque muestra las funciones
y especificaciones
requeridas para interactuar con el usuario.
•
En pantalla tipo LCD.
•
Con despliegue de menú.
•
Teclado para la selección de opciones. Ver Figura 2.7.
Figura 2.7 Diagrama funcional del control de Interfaz.
27
Especificación del módulo RDT
Capítulo 2
2.2.2 Módulo auxiliar de prueba.
Es un módulo concebido para auxiliar al módulo principal en la ejecución de las
pruebas de mapa de cableado y de caracterización de parámetros del cable como son:
atenuación y crosstalk. Su diseño se basa en un microcontrolador y sus funciones básicas
son las siguientes:
¾ Interpretación de comandos provenientes del módulo principal.
¾ Ejecución del comando ordenado por el módulo principal.
¾ Diagnóstico de comunicación con módulo maestro. Ver Figura 2.8.
Nota: las señales requeridas, así como las muestreadas son de características
similares a las otras partes del sistema.
Figura 2.8 Diagrama funcional del módulo auxiliar.
2.2.3 Interfaz hombre/máquina.
Las funciones principales de la interfaz hombre máquina se detallan a
continuación:
¾ Comunicación con el módulo probador a través de canal serial RS-232.,
utilizando protocolo propietario.
¾ Programación general del módulo electrónico de prueba.
¾ Operación con base a menús tipo desplegables seleccionables por el
usuario.
¾ Análisis de resultados de prueba.
¾ Registro de datos de prueba para propósitos de control de historiales de
prueba.
¾ Despliegue en pantalla de resultados de prueba.
¾ Generación de reportes de prueba.
28
Especificación del módulo RDT
Capítulo 2
¾ Diagnóstico de fallas del sistema de pruebas.
Todas estas funciones están pensadas para hacer de la aplicación un verdadero
instrumento de prueba y detección de fallas, así como para llevar un registro estadísticos
de estas.
29
Capítulo 3
Diseño de Hardware
Capítulo 3 Diseño de Hardware
3.1 Introducción
En la actualidad el diseño de un RDT es regido por muchos factores, entre ellos el
económico, ya que en la actualidad se hacen cada vez más populares los reflectómetros
con características portátiles y de bajo costo debido a la proliferación de las redes
cableadas.
Un RDT opera como un radar, este envía un breve pulso a lo largo del la línea y
este detecta cualquier eco de retorno debido a un corto circuito, un circuito abierto o una
discontinuidad abrupta en la impedancia de la línea. El intervalo de tiempo que transcurre
en un cable típico, entre el pulso que es enviado y su retorno es aproximadamente 3.3ns
por pie, asumiendo que la propagación en la línea es de 0.6c (un sexto de la velocidad de
la luz). Así, teniendo una resolución de 10ns en nuestra electrónica, la distancia más
pequeña a cualquier discontinuidad que se puede medir es de 3 pies.
30
Capítulo 3
Diseño de Hardware
Mediante el empleo de un ADC con una tasa de muestreo de aproximadamente 2
MSPS, se podría obtener una resolución en el RDT de 5ns. Cualquier ADC de esta gama
resultan ser muy caros, con un consumo de energía considerable y generalmente
prohibitivo para aplicaciones portátiles. En la
Tabla 3.1 y la
Tabla 3.2 se muestran algunos de los más comunes Convertidores A/D del
mercado. Podemos ver la diferencia de precio entre los convertidores rápidos y los de
gama media que en la mayor parte de los casos supera el 1000%. Estos últimos, los de
gama media, son los que usamos para nuestra aplicación.
Tabla 3.1 Convertidores Analogico-Digitales rápidos.
Ancho de
Resolución
Canales de
Tasa de
Max. Tiempo
(Bits)
Entrada
muestreo(max)
de Conv. (ns)
MAX1205
14
1
1 MSPS
2
3.3
MAX1200
16
1
1 MSPS
3.9
3.3
No. De Parte
Banda
Encapsulado
(MHz)
44/MQFP10x10
44/MQFP10x10
Precio
@ 1KU
$11.50
$20.21
44/LCC
MAX1201
14
1
2.2 MSPS
1.8
3.3
44/MQFP-
$36.52
10x10
Tabla 3.2 Convertidores Analógico-Digitales de gama media.
Interfase
Aprox. 1KU
Paralela
Precio(US$)
Resolución
Tasa de
(Bits)
muestreo(max)
ADS7818
12
500kSPS
SAR
2.50
ADS7834
12
500kSPS
SAR
2.45
No. de Parte
Arquitectura
31
Multicanal
Capítulo 3
Diseño de Hardware
Tabla 3.3 Convertidores Analógico-Digitales de gama media. Continuación.
Resolución
Tasa de
(Bits)
muestreo(max)
ADS7835
12
500kSPS
SAR
ADS7852
12
500kSPS
SAR
No. de Parte
Arquitectura
Multicanal
Interfase
Aprox. 1KU
Paralela
Precio(US$)
2.75
Si
Si
3.40
Con base a la especificación realizada en el capitulo anterior se realizó el diseño
del equipo RDT propuesto. Basándose en un sistema modular tanto en la parte de
hardware como de software, así se tiene una implementación más sencilla a la vez que
permite la escalabilidad del diseño.
Actualmente el empleo de sistemas modulares permite mayor flexibilidad para la
mejora de productos, así como el reciclaje de ingeniería, la construcción de sistemas más
complejos, basados en unir células electrónicas sencillas.
Este enfoque es el que tomamos. En los apartados siguientes se detallan los
bloques diseñados.
3.2 Descripción modular del RDT
En el presente apartado se presenta la descripción funcional del módulo
propuesto. La Figura 3.1 muestra la descripción por bloques del módulo basado en la
RDT.
32
Capítulo 3
Diseño de Hardware
Figura 3.1 Diagrama a bloques del módulo RDT.
3.2.1 Unidad de procesamiento
Las funciones de la CPU son las siguientes:
• Generación de la señal de referencia para el pulso a transmitir a través del
cable.
• Comunicación mediante el canal serie.
• Manejo del display y teclado.
• Procesamiento de la información.
• Almacenamiento de información trascendente.
33
Capítulo 3
Diseño de Hardware
La complejidad de los procesos para la detección de fallas, así como la necesidad
del procesamiento de datos para propósitos de almacenamiento, estadística e historial,
hace necesario el uso de un microcontrolador.
Las opciones de diseño para el desarrollo del módulo RDT (Figura 3.1) se basaron
en modelos populares de microcontroladores de las compañías siguientes:
• Atmel con la serie de microcontroladores AVR, de arquitectura RISC.
• Motorola con la familia HCS12.
• Microchip con la serie 16F8XX.
En un principio se escogió, por razones de disponibilidad inmediata en el mercado
local y simplicidad, el microcontrolador PIC16F877 de la compañía Microchip, sin
embargo se declinó su uso por el microcontrolador MC9S12A128 de Motorola. Las
ventajas sobre microchip son muchas. A continuación se enumeran algunas.
• Motorola1 es líder mundial en la fabricación de microcontroladores solamente
superado por Intel.
• Se tiene conocimiento previo de la programación de la familia HS12 a la que
pertenece el microcontrolador de motorola.
• La herramienta de programación en lenguaje de alto nivel, lenguaje C, de
motorola hay disponibilidad en versiones gratuitas, propias para desarrollo e
investigación.
• El ambiente de programación de motorola es por mucho más potente a nivel
compilador que Microchip.
1
Al momento del desarrollo de esta tesis la compañía Motorola vendió su división Digital DNA,
la cual desarrollaba el microcontrolador MC9S12A128, usado en este trabajo. Actualmente este dispositivo
es comercializado por la marca Freescale Semiconductor.
34
Capítulo 3
Diseño de Hardware
• La programación de microcontroladores motorola permite una gran
portabilidad de código, lo que permite la migración fácil a tecnologías nuevas.
• El diseño modular nato de los microcontroladores Motorola permite el uso fácil
de programación basado en controladores de dispositivos, produciendo un
código más limpio y más complejo sin demeritar la legibilidad de este.
Las características generales de este microcontrolador se anexan como apéndice
de este documento.
En el caso de la compañía Atmel era necesaria la migración a un microcontrolador
de mayores prestaciones, lo cual aumentaba el tiempo de investigación. Dado que se tenía
el conocimiento previo de la arquitectura de la familia HCS12, se decidió el uso de este
microcontrolador.
La Figura 3.2 muestra de forma funcional el bloque de la CPU.
Figura 3.2 Diagrama funcional del bloque CPU.
La implementación electrónica de este bloque se muestra en la Figura 3.3.
35
Figura 3.3 Diagrama eléctrico del bloque CPU.
36
A
B
C
D
K[7:0]
1
S3
R21
C25
HOLD[C:A]
3
2
1
W5
6
4
2
J7
CONTROL MICRO
A[2:0]
R24
RESET
D9
VCC
PT0
GLOBAL RESET
K0
K1
K2
K3
K4
K5
K6
K7
DAC SEL
R23
5
3
1
XTAL
VCC
A2
A1
A0
C21
BKGD
VCC
C16
Y1
D[7:0]
C26
P15
R17
BUSY
CS
RD
DB[07:0]
WR
DACSEL
P31
FLIP FLOP RESET
PP+
DELAY GEN
24
25
26
27
37
38
39
40
23
22
21
20
19
18
17
16
14
13
12
11
8
7
6
5
59
31
32
61
60
XTAL 35
EXTAL 34
C15
DB7
DB6
DB5
DB4
DB3
DB2
DB1
DB0
D7
D6
D5
D4
D3
D2
D1
D0
78
79
80
1
2
3
4
VDDA
VDDPLL
XFC
VRL
VRH
XTAL
EXTAL
2
XCLKS/NOACC/PE7
MODB/IPIPE1/PE6
MODA/IPIPE0/PE5
ECLK/PE4
LSTRB/TAGLO/PE3
R/W/PE2
IRQ/PE1
XIRQ/PE0
ADDR7/DATA7/PB7
ADDR6/DATA6/PB6
ADDR5/DATA5/PB5
ADDR4/DATA4/PB4
ADDR3/DATA3/PB3
ADDR2/DATA2/PB2
ADDR1/DATA1/PB1
ADDR0/DATA0/PB0
IOC7/PT7
IOC6/PT6
IOC5/PT5
IOC4/PT4
IOC3/PT3
IOC1/PT2
IOC1/PT1
IOC0/PT0
Autor: Israel Leyrana
MODC/TAGHI/BKGD
TEST
RESET
VREGEN
VSS1
VSS2
VSSX
VSSR
VSSA
VSSPLL
VDD1
VDD2
VDDX
VDDR
PJ6/KWJ6/SDA
PJ7/KWJ7/SCL
PM0
PM1
PM2/MISO0
PM3/SS0
PM4/MOSI0
PM5/SCK0
PS3/TXD1
PS2/RXD1
PS1/TXD0
PS0/RXD0
PAD07/AN07/ETRIG0
PAD06/AN06
PAD05/AN05
PAD04/AN04
PAD03/AN03
PAD02/AN02
PAD01/AN01
PAD00/AN00
BOTON1
BOTON2
69
68
15
36
30
67
10
50
76
28
62
33
RESET
VREGEN
BKGD
P9
P49
DATA4
DATA5
DATA6
DATA7
RS
E
75
74
73
72
71
70
9
49
77
29
TX0
RX0
WIRE7
WIRE6
WIRE5
WIRE4
WIRE3
WIRE2
WIRE1
WIRE0
66
65
64
63
58
57
56
55
54
53
52
51
DB15
DB14
DB13
DB12
DB11
DB10
DB9
DB8
Scale
C17
VCC
C18
WIRE[7:0]
/OE
O0
D0
D1
O1
O2
D2
D3
O3
GND
IC6
VCC
O7
D7
D6
O6
O5
D5
D4
O4
LE
WIRE7
WIRE6
WIRE5
WIRE4
WIRE3
WIRE2
WIRE1
WIRE0
K7
D7
D6
K6
K5
D5
D4
K4
LE
VCC
3
CPU
FCSM No.
DWG No.
1
CENIDET
INTERIOR INTERNADO PALMIRA S/N
CUERNAVACA, MORELOS, MEXICO
VCC
Size
Letter
GND
K0
D0
D1
K1
K2
D2
D3
K3
GND
DB[15:8]
48
47
46
45
44
43
42
41
U6
PWM7/KWP7/PP7
PWM5/KWP5/PP5
PWM4/KWP4/PP4
SS1/PWM3/KWP3/PP3
SCK1/PWM2/KWP2/PP2
MOSI1/PWM1/KWP1/PP1
MISO1/PWM0/KWP0/PP0
PA7/ADDR15/DATA15
PA6/ADDR14/DATA14
PA5/ADDR13/DATA13
PA4/ADDR12/DATA12
PA3/ADD11/DATA11
PA2/ADDR10/DATA10
PA1/ADDR9/DATA9
PA0/ADDR8/DATA8
3
2
P9
P9
C33
C27
3
2
1
W4
8
C34
P49
C28
P49
3.3V
1
Sheet
2 of 6
C35
VCC
P77
C29
OUT
GND
4
C36
VCC
P29
C30
VCC
P29
3.3VDC
E
1
2
3
W3
1
2
3
W2
1
2
3
W1
GND
EXTAL
J8
C37
P31
C31
P31
5
4
VREGEN
VCC
VCC
XTAL OSC
VCC
P77
VCC
R18
R16RESET
GLOBAL
VCC
Default 2-3
3
2
1
W6
R14
BUSY R15
CS
4
VCC
Rev
1.0
C38
VCC
P59
C32
VCC
P59
2
1
1
A
B
C
D
Capítulo 3
Diseño de Hardware
Capítulo 3
Diseño de Hardware
3.2.1.1 Generador de pulsos.
La generación del pulso constituye una parte sumamente importante en el diseño
del RDT. Para generar este se separa el diseño en dos partes.
• La generación de una onda cuadrada de 60 Khz, como frecuencia fundamental
del pulso.
• La generación de un pulso de 40 ns, con la frecuencia arriba mencionada.
Esto se puede ver mejor en la Figura 3.4
Figura 3.4 Diagrama funcional del generador de pulsos.
El microcontrolador MC9S12A128, tiene asociado un módulo PWM (Modulador
por ancho de pulso, por sus siglas en inglés, Pulse Width Modulator), el cual mediante
una adecuada configuración de registros se puede utilizar como un generador de onda
cuadrada de frecuencia estable con la particularidad de ser modificado su ciclo de trabajo
y/o frecuencia mediante software.
A este módulo se le complementa mediante un driver para poder manejar un pulso
con mayor energía y así evitar que la amplitud “caiga” debido a la impedancia propia de
la línea.
37
Capítulo 3
Diseño de Hardware
El driver que controla la potencia del pulso transmitido se diseñó con un transistor
de alta ganancia de base, con una impedancia de salida igual a la de la línea de
transmisión para evitar reflexiones espurias.
A
FCSM No.
Scale
Size
Letter
3
GENERADOR
R4
GEN
R2
Autor: Ing. Israel Leyrana Ceballos
GND
C3
3
2
1
J2
VCC
13
4
Q
Q
R1
A
B
CLR
Cext
Rext/Cext
1
A
B
C
D
1
VCC
VCC
C1
PT0
2
1
2
3
14
15
U2A
GND
3
1
2
R3
Q1
2
R8
C2
3
CENIDET
INTERIOR INTERNADO PALMIRA S/N
CUERNAVACA, MORELOS, MEXICO
DWG No.
Sheet
5 of 6
4
4
Rev
1.0
B
C
D
El diagrama eléctrico de este bloque se muestra en la Figura 3.5.
Figura 3.5 Diagrama eléctrico del generador de pulsos.
38
Capítulo 3
Diseño de Hardware
3.2.1.2 Despliegue de información
Dado que la gran mayoría de las aplicaciones de cableado requieren de sistemas
que se puedan manejar “standalone”, estos dispositivos requieren de interfaces con el
usuario para el manejo de su información, y opciones de diagnóstico. El RDT propuesta
cuenta con tres vía de comunicación (ver Figura 3.6):
• Puerto serie para comunicación con la PC.
• Pantalla LCD para despliegue de información.
• Teclado para selección de opciones.
Figura 3.6 Diagrama funcional del módulo de interfase.
El display utilizado es de American Settler el cual maneja 4 bits de datos, así
como sus señales de control del LCD y su ajuste de contraste. El LCD es de 2X16 (dos
líneas y 16 caracteres por línea), para obtener una mejor visualización y claridad en los
datos mostrados.
La opción de teclado es implementada mediante dos micro-interruptores, los
cuales se cablean a unos pines especializados en el manejo de teclado, estos pines tienen
opciones de antirebote, así como de interrupciones las cuales pueden ser priorizadas, de
esta manera el flujo del programa puede ser optimizado, para trabajar en diferentes
39
A
B
C
1
GND
E 9
10
RS11
12
E
R/W
RS
V_LC
J5
GND
J6
BOTON2
BOTON1
LCD M1632
GND
R20
14
V_DD
2
13
GND
LCD CONTRAST
V_SS
2
VCC
J3
1
2
3
S1
S2
1
2
3
TX0_E
TX1_E
C24
3
C22
13
8
11
10
1
3
3
TX0_E
RX0_E
TX1_E
RX1_E
Figura 3.7 Diagrama eléctrico de la interfaz de usuario y puerto serie.
Date:
File:
Letter
Size
Title
R1 IN
R2 IN
T1 IN
T2 IN
C1 +
C1 -
U7
C19
C20
VCC
2
6
16
V+
VVCC
GND
15
2
4
6
8
C23
TX0
RX0
TX1
RX1
12 RX1_E
9 RX0_E
14
7
4
5
J4
R22
VCC
J11
RXD
J10
4
1
6
2
7
TXD 3
8
4
9
5
4
9-Aug-2004
Sheet of
E:\israel\Escuela\Tesis\protel99se\tesis\TESIS09072004.ddb
Drawn By:
Number
1
3
5
7
J12
R1 OUT
R2 OUT
T1 OUT
T2 OUT
C2 +
C2 -
J9
1
2
3
2
1
1
2
D
1
DB7
DB6
DB5
DB4
DB3
DB2
DB1
DB0
40
2
1
TX D
1
2
3
4
5
6
7
8
Revision
J13
A
B
C
D
Capítulo 3
Diseño de Hardware
planos de acuerdo a la tarea que se este llevando a cabo. La Figura 3.7 muestra la
implementación física de este bloque.
DAT A4
DAT A5
DAT A6
DAT A7
Capítulo 3
Diseño de Hardware
Como se ve en el diagrama el canal serie utiliza un transceiver para acondicionar
la señal al puerto de la PC. El LCD tiene un transceiver integrado al encapsulado de la
pantalla. Todas las señales de control proceden del microcontrolador
3.2.1.3 Memoria
En la Figura 3.2 se puede ver que el módulo CPU contiene un bloque de
almacenamiento . Este bloque realiza las funciones las siguientes funciones:
• Almacenamiento de historial.
• Respaldo de información de parámetros.
• Memoria RAM del sistema.
El microcontrolador MC9S12A128, tiene 128 kb de flash, así como 8 kb de
RAM, y 2 kb de memoria EEPROM. Este espacio de memoria no solo permite la
estructuración de un programa suficientemente complejo, sino que además permite la
implementación de almacenamiento permanente, sin necesidad de recurrir a dispositivos
externos de memoria, los cuales en el futuro se puede usar para implementar una salida
hacia algún dispositivo externo como puede ser PDA.
3.2.1.4 Interfase serial (SCI, serial communication interface)
El MC9S12A128 tiene 2 puertos SCI, los cuales mediante una interface RS-232
puede ser conectado al puerto de comunicaciones serie de una PC, en el diseño del RDT
se utiliza el SCI0 para este fin.
De esta manera se puede enviar información a la PC, para fines estadísticos, de
almacenamiento o para la visualización de la información aprovechando la capacidad de
procesamiento de la PC, así como la simplicidad del puerto serie. Ver Figura 3.7.
41
Capítulo 3
Diseño de Hardware
3.2.1.5 Detector de Pulsos
La función principal de este módulo es la detección del pulso RDT, lo cual se
logra mediante la implementación de los siguientes sub-bloques (ver Figura 3.8):
• Comparador de umbral, el cual recibe el pulso de retorno.
• Comparador de polaridad, para llevar a acabo la detección de cortos o abiertos.
• Controlador de pulsos, el cual envía a la CPU las señales adecuadas
dependiendo del pulso de retorno, para así ser procesadas.
Figura 3.8 Diagrama funcional del detector de pulsos.
Si bien esta etapa está fuera de la CPU, la parte de procesamiento si se encuentra
en esta. La detección se realiza mediante un arreglo de comparadores ultrarrápidos de
MAXIM, los MAX479. Estos integrados son alimentados mediante una fuente de
alimentación simple y un retardo de 10 ns.
Esta etapa es la aplicación práctica de la teoría de reflectometría. El generador de
pulsos envía un pulso a la línea de transmisión al cual se le proporciona ganancia en
corriente mediante el impulsor. Cualquier reflexión generada es acoplada mediante el
comparador.
El diagrama de la Figura 3.9 muestra el diagrama eléctrico de esta etapa.
42
43
Figura 3.9 Diagrama eléctrico del detector de pulsos.
A
B
C
FLIP FLOP RESET
1
PP+
Q
/Q
Q
/Q
IC1B
VCC
S
VCC
S
C
C
IC1A
D
CP
D
CP
LCD CONTRAST
DELAY GEN
GND
2
VCC
OUT
IC3D
GND
DAC SEL
/Q
Q
GND
LE
IC2
+
-
D[7:0]
V+
IN+
IN-
V-
VCC
GND
D0
D1
D2
D3
D4
D5
D6
D7
GND
1
C7
OUT
IC3B
Rfb B
VrefB
OUT B
Autor: Ing. Israel Leyrana Ceballos
CS
DACSEL
DAC A/DACB
WR
WR
RfbA
VrefA
OUT A
+
-
OUT
VCC
GND
12
GND
IC3A
VCC
GND GND VCC
R7
R6
BOT
TOP
DB0[LSM]
DB1
DB2
DB3
DB4
DB5
DB6
DB7[MSB]
IC4
C5
GND
R5
GND
C4
AGND
GEN
DGND
2
V+ V-
11
V+ V-
4
V+ V-
Vdd
-
R11
+
R9
3
2
Scale
Size
Letter
GND
R12
R10
GND
GND
VCC
OUT
IC3C
V+ V-
3
RDT
FCSM No.
DWG No.
Centro Nacional de Investigacion y Desarrollo Tecnologico
Interior Internado Palmira S/N
cuernavaca, morelos, mexico
3
-
+
Sheet
6 of 6
4
2
4
GND
IC5
R13
VCC
1
D
1
C6
Rev
1.0
A
B
C
D
Capítulo 3
Diseño de Hardware
Capítulo 3
Diseño de Hardware
Cada pulso que entra a la línea de transmisión es comparado con un retardo
variable generado por la CPU. Este retardo es controlado por un timer de 8 bits con los
que cuenta el microcontrolador. Este retardo es enviado a las entradas D de unos flipflops, los cuales son temporizados por las salidas TTL del comparador. Así, se puede
medir el intervalo de tiempo entre el pulso enviado y el pulso recibido: si la entrada D
llega antes de la transición del pulso de reloj, la salida del flip-flop permanece en alto; de
otra manera es cero. La implementación de un comparador con salida complementada
permite la detección de pulsos negativos y positivos, con lo que es posible la
determinación de circuitos abiertos o cortos circuitos.
3.2.1.6 Control de Conmutación de señal.
Debido a que por los 8 alambres del cable de red serán enviadas señales para la
medición de diferentes parámetros, es necesaria la implementación de un sub-sistema
para la selección de canales. Este debe tener la capacidad de poder direccionar la señal
RDT procedente de la CPU para enviar por los distintos hilos del cable UTP. La Figura
3.10 muestra el flujo del pulso de retorno.
Figura 3.10 Diagrama funcional del módulo de conmutación.
44
Capítulo 3
Diseño de Hardware
Esto se implementa mediante un arreglo de relevadores, los cuales direcciónan
cada alambre a diferentes pines del microcontrolador, los cuales a su vez, realizan tareas
diferentes.
También, tienen como función el aislamiento del pin, ya que la conmutación
permite evitar que los alambres se conecten tanto al microcontrolador, como al ADC,
simultáneamente, lo cual haría que la impedancia propia de los pines del
microcontrolador alteren la medición. Ver Figura 3.10.
3.2.2 Adquisición de datos.
Este bloque tiene como función principal la adquisición y procesamiento de la
señal de retorno. La Figura 3.11 muestra este bloque y su funcionalidad.
• Sub-sistema de
acondicionamiento de señal, basado en un amplificador
operacional para la adquisición de señales bipolares.
• Convertidor análogo a digital.
• Salida del convertidor y señales de control hacia la CPU.
Figura 3.11 Diagrama funcional del módulo de adquisición.
Para obtener parámetros de NEXT , es necesario la implementación de un
convertidor de análogo a digital. Estos tipos de dispositivos son sumamente caros para
aplicaciones de alta velocidad, por lo que se optó por la implementación de un esquema
en cascada, el cual mediante un ADC de 6 canales se muestrea la señal a intervalos
45
Figura 3.12 Diagrama eléctrico del módulo de adquisición
A
B
1
DB[15:8]
C12
C39
HOLDA
DB8
DB
8
10
DB[7:0]
2
VCC
XTAL
16
1
VCC
4
CLR
PRE
VCC
Q
Q
14
15
Autor: Ing. Israel Leyrana Ceballos
K
CLK
J
U10A
VCC
BUSY
GND
GND
CONTROL MICRO
Scale
Size
Letter
C41
25
RD CS
26
B4
D14
DB5 DB4 DB3 DB2 DB1 DB0 BUSYDGND+Vo CLOCK
RD CSHOLDC
B3
D15
HOLDB
B2
D16
DB6
27
BYTE
DB9
DB99
B1
D17
DB
6
12
29 A2
VCC
28
A2
DB10
DB10
8
B0
D18
DB7
30 A1
A1
DB11
7
DB11
20
DB
7
11
31 A0
19
3
1
B5
D13
U8A
C14
U9A
V-
C40
R25
VCC
1
2
3
R27
4
VCC
U9B
R28
C13
R26
GND
3
ADC
3
FCSM No.
Adquisición
DWG No.
Centro Nacional de Investigación y Desarrollo Tecnológico
Interior Internado Palmira s/n
Depto Electrónica
GND
2
A[2:0]
12V
IN+
OUT
IN-
GLOBAL RESET
32
A0
DB12
DB12
6
ADS7864
33
RESET
35
36
DB13
+VA
DB13
5
47
34
48
REFOUT
45
DB14
46
DB15
43
DB14
4
44
DB15
3
41
AGND
CH A0+
CH A0CH B0+
CH B0-CH C0+
CH C0-CH C1-CH C1+
CH B1-CH B1+
CH A1CH A1+
REFIN
42
AGND
1
38
2
U11
+VA
2
3
C
VCC
39
22
D
40
21
11
V+ V-
4
2
37
24
46
23
A
1
8
6
Sheet
U9D
U9C
3 of 6
HOLD[C:A]
9
5
4
4
Rev
1.0
A
B
C
D
Capítulo 3
Diseño de Hardware
periódicos y secuenciales entre cada canal. De esta manera se puede obtener una
respuesta aproximada a como lo haría un convertidor de tipo rápido.
Capítulo 3
Es
Diseño de Hardware
importante
mencionar
una
ventaja
del
uso
del
microcontrolador
MC9S12A128, y es la posibilidad de usar el mismo reloj que lo temporiza para otras
etapas en el circuito, esto debido a un pin denominado EXTAL, la cual es la misma señal
de reloj, pero acondicionada internamente por el microcontrolador (buffered), lo que le
permite ser usada para temporizar, en este caso, al ADC.
Los datos obtenidos por el ADC, son leídos paralelamente por el
microcontrolador, para luego ser procesados.
El diagrama eléctrico se muestra en la Figura 3.12.
3.2.3 Multiplexeo de señal
Esta etapa es complementaria de la de control de conmutación como se puede ver
en la Figura 3.13. Esta etapa es conformada por un driver ULN2803 que maneja el
inductor de las bobinas de los relevadores, lo cual ayuda a los pines del microcontrolador
para dar mayor corriente. Los relés son tipo RAS0610, ampliamente usados en
electrónica de control digital.
Esta electrónica tiene por objeto la selección de señales de acuerdo a la tarea
realizada por el microcontrolador, que a su vez depende el parámetro que se esté
midiendo. La lógica es controlada por el programa de usuario cargado en la memoria de
la CPU.
47
Figura 3.13 Diagrama eléctrico del módulo de conmutación
A
B
C
D
1
1
K[7:0]
VCC
K0 1
K1 2
K2 3
K3 4
K4 5
K5 6
K6 7
K7 8
10
IN 1
IN 2
IN 3
IN 4
IN 5
IN 6
IN 7
IN 8
DIODE CLAMP
U1
GND
GND
9
OUT 1
OUT 2
OUT 3
OUT 4
OUT 5
OUT 6
OUT 7
OUT 8
2
2
18
17
16
15
14
13
12
11
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
48
2
D8
D7
D6
D5
D4
D3
D2
D1
VCC
5
4
5
4
5
4
5
4
5
4
5
4
5
4
5
4
RLY8
RLY7
RLY6
RLY5
RLY4
RLY3
RLY2
RLY1
2 WIRE7
1
3
2 WIRE6
1
3
2 WIRE5
1
3
2 WIRE4
1
3
2 WIRE3
1
3
2 WIRE2
1
3
2 WIRE1
1
3
2 WIRE0
1
3
3
GEN
3
Date:
File:
Letter
Size
CENIDET
2
4
6
8
10
12
14
16
4
9-Aug-2004
Sheet of
E:\israel\Escuela\Tesis\protel99se\tesis\TESIS09072004.ddb
Drawn By:
Number
Autor: Ing. Israel Leyrana Ceballos
Title
SWITCH
1
2
3
4
5
6
7
8
J1
WIRE[7:0]
JP1
WIRE0
1
WIRE1
3
WIRE2
5
WIRE3
7
WIRE4
9
WIRE5
11
WIRE6
13
WIRE7
15
4
Revision
ADC
1.0
A
B
C
D
Capítulo 3
Diseño de Hardware
Capítulo 3
Diseño de Hardware
3.2.4 Módulo auxiliar
Este módulo no tiene electrónica asociada, sino solamente es un puente entre los
alambres del cable UTP, sin embargo es necesario para llevar a cabo las mediciones de
algunos parámetros como son el mapa de cableado y el NEXT.
Lleva un conector de tipo AMP RJ45 para la conexión directa del cable una vez
ensamblado.
3.3 Diseño del PCB
La placa de circuito impreso (PCB), se diseño enteramente en el programa Protel
99SE, la cual utilizada en todo su potencial ofrece una herramienta excelente como
organizador del proyecto, ya que a partir de los esquemáticos mostrados en el capitulo 3,
se desarrolló la placa final, con los módulos integrados.
Este programa genera el PCB a partir del diseño jerárquico del esquemático y a
cada subsistema lo convierte en un bloque definido, llamada clase, en el documento PCB,
esto da la facilidad para el acomodo de componentes de acuerdo a su conexión lógica y
física.
Una vez hecho el documento PCB, se establecen reglas para el diseño de la placa,
las principales que se establecieron son:
• Tamaño mínimo de pista a 8.6 imperial
• Tamaño preferido de pista a 15 imperial
• Distancia mínima entre componentes a 10 imperial
• Distancia mínima al plano de tierra a 30 imperial
• Plano de tierra enrejillado
49
Capítulo 3
Diseño de Hardware
• Topología de enrutamiento daise-chain simple.2
• Enrutamiento manual de la alimentación
• Entre otros.
Figura 3.14 PCB final, imagen 3D generada por el Protel 99SE
2
Técnica de enrutado de placas de circuito impreso mediante la cual las pistas interconectan en
serie cada uno de los dispositivos asociados a un mismo nodo.
50
Capítulo 3
Diseño de Hardware
Como se puede ver, el diseño del PCB implica conocer algunos fundamentos
básicos del comportamiento de las señales, ya que el hecho de no poner un buen plano de
tierra en los pines cuyas señales manejan altas frecuencias, puede repercutir en un mal
desempeño del microcontrolador. Cosas tan simples como el enrejillado del plano de
tierra, puede causar problemas al momento de la manufactura del PCB, ya que los planos
de tierra sólidos, tienden a formar burbujas de aire que al momento del calentamiento
para proceder a soldar, termina en levantar la capa de cobre, con lo cual puede dañarse el
prototipo.
El diseño final del PCB, se muestra a continuación, en la Figura 3.14, esta es una
imagen generada por el protel, la cual muestra el diseño final de la placa.
El diseño completo se anexa como apéndice de este documento.
3.4 Conclusiones
Cuando se manejan frecuencias arriba de los 20 Mhz, el manejo de señales se
vuelve verdaderamente complicado.
Debido a la limitante que presenta el no contar con herramientas adecuadas para
la elaboración rápida de impresos es necesario trabajar con una placa para prototipos
(protoboard) lo cual para aplicaciones de este tipo se vuelve sumamente ineficiente.
Para las pruebas presentes fue necesario el desarrollo de PCB, ya que la
capacitancia propia de las conexiones de la placa de prototipos deforma las señales y
pulsos generados.
La tecnología aplicada nos impide la medición de parámetros y fallas en cables
menores a 10 metros, por lo cual es necesaria la exploración de tecnologías más rápidas,
lo cual supone un costo superior.
51
Capítulo 3
Diseño de Hardware
Una de las partes medulares en el desarrollo del presente trabajo es sin lugar a
dudas el desarrollo del prototipo, ya que este implicó el conocimiento de tecnologías
nuevas, las cuales, en el presente, están sirviendo de plataforma para desarrollos
comerciales, muchos de ellos aplicando la técnica RDT.
52
Capítulo 4
Diseño de Software
Capítulo 4 Diseño de Software
4.1 Introducción
El principio del cual se basa la Reflectometría en Dominio del Tiempo, hasta hace
unos años sólo podía usarse en dispositivos especializados y por ende caros. El
advenimiento de los microcontroladores, nuevas tecnologías de integración en la
fabricación de circuitos integrados, así como la mejora en el desempeño de estos, ha
reducido considerablemente el costo del uso de estos dispositivos para aplicaciones que
usen la RDT.
Hoy en día el uso de microcontroladores no sólo supone el conocimiento de
fundamentos de hardware, interfaces, buses de comunicación y manufactura de tarjetas
de circuito impreso, sino que también el conocimiento de lenguajes de programación de
alto nivel.
53
Capítulo 4
Diseño de Software
En el prototipo propuesto se desarrolló todo el software mediante el uso del
lenguaje “C” de alto nivel. Esto mediante el uso de la herramienta de desarrollo
“CodeWarrior” de la compañía Metrowerks, subsidiaria de Motorola (hoy Freescale, en
su división de microcontroladores).
Debido al aumento en la complejidad no sólo del núcleo de los
microcontroladores, sino de los programas de aplicación, se usa una metodología de
programación modular mediante el uso de controladores para cada módulo del prototipo.
Esto es una analogía con las computadoras personales, las cuales manejan sus periféricos
mediante un controlador, de tal suerte que, una vez instalado el dispositivo, se instala un
componente de software el cual lo inicializa y maneja (de ahí el nombre de controlador).
Figura 4.1 Arquitectura del sistema RDT.
La Figura 4.1 muestra la arquitectura del sistema propuesto, claramente podemos
distinguir dos niveles de software: 1) el firmware y 2) el software, con sus funciones
claramente definidas.
9 Firmware:
54
Capítulo 4
Diseño de Software
o Ejecución del programa principal.
o Subrutinas de acuerdo a los eventos generados por el usuario.
o Controladores de dispositivos (PWM, SCI, etc.).
o Controladores de periféricos (RS-232, A/D, etc.).
9 Software:
o Recuperación de historial.
o Programación de pruebas.
o Diagnostico del módulo RDT.
La filosofía de funcionamiento modular es doblemente útil con el manejo de
microcontroladores como el utilizado para este prototipo, el A128, ya que su construcción
modular propicia el uso de controladores de software, así mismo, está optimizado para el
manejo de lenguaje “C” mediante instrucciones especializados para el manejo de índices,
los cuales, en términos de programación, facilitan el uso de apuntadores. Todo esto
optimiza el uso de la memoria RAM del microcontrolador.
Un punto importante por mencionar es acerca del compilador de “C”, el cual
genera código en ensamblador que difícilmente podría ser igualado haciéndolo
manualmente, dada la complejidad para la configuración de registros e inicialización del
microcontrolador.
4.2 Programa principal
Un reto para un programador de firmware es el uso de interrupciones y la
tolerancia a fallas de su sistema. Esto no siempre es fácil conseguirlo, sin embargo una de
las formas más eficaces de hacerlo es mediante el empleo de temporizadores para
monitorear los procesos del programa y de esta manera después de cierto tiempo en el
cual no se cumpla una condición determinada, o bien, no se establezca un registro o
bandera, automáticamente se da por terminado el proceso.
55
Capítulo 4
Diseño de Software
Esto hace que el programa sea robusto y no se quede ciclado en alguna rutina
iterativa (“loop”).
En la programación del RDT, se recurre a esta filosofía de programación. Todo el
programa gira en torno al programa principal y la función MAIN (), como se aprecia en
la Figura 4.3, cualquier evento saca al programa del ciclo principal, y lo lleva al evento
en cuestión, sin embargo el programa regresa a la función principal. Mediante el
adecuado uso de banderas se determina cual controlador es el que se llama (ver Figura
4.5).
Es importante mencionar que los controladores descritos en los apartados
siguientes son llamados en la función principal, sin embargo cada controlador contiene
funciones estáticas, las cuales no son vistas por la función principal.
4.3 Diseño de controladores
Figura 4.2 Módulos de software.
56
Capítulo 4
Diseño de Software
La modularidad en el diseño de software queda expresada en la Figura 4.2, donde
claramente se puede ver que la parte medular es la función MAIN(), aquí es donde se
hacen las llamadas a las funciones que controlarán a los demás periféricos.
Esto es extremadamente útil cuando se diseñan sistemas complejos, ya que
permite la modificación de software sin necesidad de alterar el programa principal, así
como una verdadera modularidad en el diseño.
Del programa principal de desprenden 3 bloques los cuales son:
1. Librerías para inicialización y macros para ejecutarse en tiempo de compilación.
2. Librerías para control de los controladores de software en donde se encuentran las
funciones de usuario.
3. Archivo de llamada a eventos.
Figura 4.3 Diagrama de flujo.
57
Capítulo 4
Diseño de Software
El programa está propuesto para trabajar mediante eventos, los cuales reducen la
carga de trabajo del microcontrolador (overhead). Así, la tarea en ejecución depende del
evento que se llevo a acabo, como es una interrupción, la presión de una tecla por el
usuario, el desbordamiento de un timer, etc.
En los apartados siguientes se explican los diferentes bloques del módulo RDT.
En la Figura 4.3 se describen los módulos explicados de acuerdo al flujo general del
programa.
4.3.1 Inicialización de programa
La herramienta de desarrollo “CodeWarrior” para la programación de
microcontroladores aquí usada, ofrece la posibilidad de crear los programas mediante
plantillas prediseñadas o “stationary”, las cuales ya contienen la inicialización del
microcontrolador, como es la configuración inicial del micro, el modo que está siendo
usado, la ubicación en memoria de la RAM, EEPROM y FLASH, así como el mapeado
de los vectores de interrupción, ya que este microcontrolador tienen la particularidad de
poder mover, de forma limitada, algunos segmentos de memoria.
Este “stationary” tiene los archivos incluidos en el programa principal que a
continuación se describen:
1. CPU.H: En este archivo se inicializa el microcontrolador, así como el PLL, en el
caso de usar el “overclocking”, también se configuran los registros de mapeo de
memoria. También se definen el vector de reset, ya que en este microcontrolador
el punto de inicio inmediatamente después del RESET es el Start_up, es
precisamente en esta función en donde se llama a la función MAIN().
2. PE_TYPES.H, PE_ERROR.H, PE_CONST.H: Como su nombre lo indica estos
archivos no son más que macros para definir archivos de forma convencional, por
ejemplo, se define el tipo unsigned char como byte, lo cual es muy conveniente al
58
Capítulo 4
Diseño de Software
momento de programar. De igual manera en los demás archivos se definen
valores para los errores, y algunas constantes muy usadas en el programa.
3. IO_MAP.H: Este archivo es sumamente importante ya que es el mapeo de los
puertos del microcontrolador, es dependiente del microcontrolador utilizado al
igual que el archivo CPU.H.
4.3.2 Controladores de periféricos
El diseño del RDT propuesto esta enfocado a hacer del sistema un dispositivo
flexible a las necesidades del usuario y por supuesto a la aplicación de sistemas de
cableado, por lo que el diseño de programación está basado en el uso de controladores
para los distintos dispositivos y periféricos del sistema, como se muestra en la Figura 4.2.
4.3.2.1 SWITCH.H
Este controlador como se puede ver en la Figura 4.5 esta condicionado al evento
de usuario que solicita alguna prueba, a través del teclado (mapa de cableado, longitud,
corto, abierto, etc.).
El puerto AN00 hasta AN07, es controlado por medio de este controlador. Debido
a que estás líneas están compartidas con el DAC para el manejo del contraste del LCD, se
utiliza un LATCH para el multiplexeo de la señal.
4.3.2.2 GENERADOR.H
Este controlador inicializa el PWM del microcontrolador A128, el cual se
encuentra en el puerto P, solamente se esta usando el bit 0 de este puerto en el cual se
genera una señal de 60 Khz, con un ciclo de trabajo del 50%. La función de inicialización
es la función Init_PWM(). La función que deshabilita al generador es Disabled_PWM().
59
Capítulo 4
Diseño de Software
Este controlador trabaja en conjunción con el controlador de multiplexeo de señal,
dependiendo de la prueba que se requiera.
4.3.2.3 DETECTOR.H
Este es el controlador más complejo del sistema, ya que es el que maneja la
técnica de Reflectometría en Dominio del Tiempo.
Este controlador es el encargado de generar un retardo de tiempo (delay) el cual
mide el intervalo de tiempo transcurrido entre la transmisión del pulso y el retorno de
este.
Este retardo es generado por un timer y enviado a la circuitería mediante el pin
PT4, el cual es una de las salidas del puerto T del A128, optimizado para el manejo del
ECT. Estas salidas pueden ser configuradas como Input Capture o Output compare.
Cuando la señal se recibe en el pin de entrada este genera una interrupción, la cual
detiene la ejecución del timer, de esta manera se puede saber la distancia a la falla.
Los pines PT5 y PT6 dan la información de la polaridad del pulso, lo cual ayuda a
determinar si la reflexión es debido a un corto circuito o a un circuito abierto.
Toda la información es procesada por el micro y desplegada en la pantalla de
LCD, como se describe en el apartado 4.3.2.5, así mismo es guardada en memoria RAM
volátil para ser enviada a una PC mediante la interfaz serial, mediante el uso del
controlador del mismo nombre.
Las funciones de este controlador son: Detect_Pulse(), la cual junto con el
controlador del generador prepara al sistema para la detección del pulso. Bool
Detect_Polarity(), donde TRUE es positivo y FALSE es negativo. Detect_Cal(), el cual
60
Capítulo 4
Diseño de Software
sirve para calibrar al detector. Detect_Init(), esta función es la que inicializa el puerto del
micro así como el timer a usar.
4.3.2.4 SERIAL.H
Este controlador maneja el canal serial de comunicación del microcontrolador
(SCI), el cual esta ubicado en el puerto S del C.I. El pin S0 maneja la señal RX y el pin
S1 la señal TX.
La comunicación serial está basada en formato estándar NRZ a 9600 bps, sin
paridad y 8 bits de datos.
La función principal de este controlador es el control de la comunicación con la
PC, lo cual es posible mediante el empleo de un transceiver RS-232, para el manejo
correcto de las señales.
Las funciones que maneja esta interfaz serial son: byte AS1_RecvChar(word
*Chr), la cual es de ayuda al momento de recibir un bloque de datos; byte
AS1_SendChar(word Chr), esta función, de forma similar a la anterior, es útil cuando se
envía un bloque de datos; byte AS1_RecvBlock(word *Ptr,word Size,word *Rcv), función
necesaria para la recepción de un buffer de datos; byte AS1_SendBlock(word *Ptr,word
Size,word
*Snd),
función
para
el
envío
de
un
buffer
de
datos;
byte
AS1_ClearRxBuf(void), limpia el buffer de recepción y prepara al microcontrolador para
la siguiente recepción; byte AS1_ClearTxBuf(void), limpia el buffer de transmisión y
prepara al microcontrolador para el envío del siguiente dato.
El controlador serial utiliza un buffer de datos, configurable por programador de
hasta 256 lo cual permite el envío de bloques de memoria a la PC.
Es importante mencionar que el microcontrolador no es interrumpido hasta que el
dato completo es recibido en el buffer de entrada o bien hasta que el buffer de salida esta
61
Capítulo 4
Diseño de Software
listo para enviar, de esta manera se reduce considerablemente el overhead de
procesamiento.
4.3.2.5 INTERFAZ.H
Este controlador es el encargado de la comunicación con la interfaz de usuario,
esto es, con el LCD y el teclado.
El menú del LCD presenta varios niveles de profundidad dependiendo de la
opción que el usuario elija desde el teclado.
Sólo hay dos teclas OK y MODE, donde el uso de la primera es similar a la tecla
enter, para confirmación de la opción y la segunda tecla para la selección de opciones.
Figura 4.4 Distintos niveles del menú de usuario
62
Capítulo 4
Diseño de Software
En la Figura 4.4 se muestran los distintos tipos de fallas a detectar, como se puede
apreciar en la figura la confirmación de las opciones sólo pueden hacerse mediante dos
botones ubicados al lado izquierdo superior para la tecla OK, y del lado derecho superior
para el caso de la tecla MODE, la cual también sirve como tecla de retorno al menú
principal.
El LCD está manejado por el puerto P del microcontrolador, el nibble más
significativo es el que maneja los datos enviados al LCD por el microcontrolador, es de
notar que el bit 6 del puerto no está presente en el encapsulado de 80 pines, usado en esta
aplicación, por lo cual es necesario hacer un corrimiento de los bits menos significativos
del nibble alto.
A continuación se enlista las distintas funciones que contiene el controlador:
•
Init_LCD, inicializa el dispositivo, así como los retardos necesarios para el
despliegue correcto de la información.
•
Clear_LCD, Borra pantalla, borra la pantalla del LCD.
•
ClearBuffer_LCD, Borra buffer de datos.
•
WriteMessage_LCD, Despliega un mensaje (sin buffer).
•
WriteMessageLineBuffer_LCD, Envía una línea de mensaje al buffer.
•
WriteMessageBuffer_LCD, Escribe un mensaje (al buffer).
•
DisplayBuffer_LCD, Despliega buffer en el LCD.
•
IntToAsciiBuffer_LCD, Envía un entero como ASCII (al buffer).
•
FloatToAsciiBuffer_LCD, Envía un real como ASCII (al buffer).
•
Get_Choice, lee el teclado para determinar la opción elegida.
4.3.2.6 ADQUISICION.H
El convertidor de A/D está ubicado en el puerto A y B del microcontrolador, y sus
pines de control en el puerto M y en el puerto T, en los pines 3 y 4.
63
Capítulo 4
Diseño de Software
El controlador que controla este dispositivo tiene la función de seleccionar el
convertidor, inicializarlo para prepararse para tomar la muestra de la señal, así como
obtener el resultado.
El resultado es obtenido de forma paralela, con una extensión de 12 bits.
Para el manejo de este controlador se está utilizando el microcontrolador con el
PLL (phase locked loop) integrado para aumentar su velocidad hasta 25 Mhz, que es lo
máximo soportado para un cristal de 16 Mhz.
La configuración del PLL se lleva a cabo en el archivo CPU.H de inicialización,
la configuración de los puertos para el manejo del A/D, se lleva a cabo por la función
Ini_ADC(), la cual establece cuales pines serán de entrada y cuales de salida. Esta misma
función inicializa el controlador para su uso por el programa principal.
La función Read_ADQ(), lee el valor de la medición tomada por A/D una vez que
este a terminado la adquisición.
Es importante hacer notar, que los valores obtenidos son puestos en un buffer el
cual es leído por las funciones del controlador de interfaz, para luego ser procesadas y/o
desplegadas en el LCD, o bien, enviadas por el puerto serie. De esta manera el manejo de
los datos es más sencillo, y estos no quedan ligados a un controlador en particular, sino
que están a disposición de otras partes del programa, lo cual mejora el uso de los datos.
4.4.3 Controlador de eventos de usuario
El manejo del programa basado en eventos de usuario es por mucho útil en el
manejo de programas complejos. Esta filosofía es muy similar al método por
interrupciones, de hecho, los eventos son manejados por las interrupciones. Esto es que,
cuando algún dispositivo genera una interrupción (presión del teclado, adquisición
finalizada, pulso detectado, etc.), en la misma función de interrupción se encuentra una
64
Capítulo 4
Diseño de Software
bandera que dispara el evento. Es en el evento, en donde el usuario programa la acción a
tomar.
La particularidad de este método consiste en que el evento puede ser temporizado
o condicionado a cierto numero de condiciones, las cuales si no se dan, el evento no se
lleva a cabo, esto sugiere la posibilidad de que varias interrupciones pueden generar el
mismo evento y este sólo se ejecutará siempre y cuando se de en cierto orden, o bien
cuando todas las banderas de las condiciones requeridas se hayan llevado a cabo.
Los eventos que manejamos en la programación del RDT se pueden ver en la
Figura 4.3, como se muestra en esta figura, el archivo EVENTS.H es quien establece la
condición afirmativa para que el programa principal llame a los distintos controladores,
de esta manera, el control lo tiene el usuario.
Si el usuario presiona una tecla, se genera la interrupción la cual espera a que
escoja la opción, ya que como se ve en la Figura 4.4, el menú continúa interactuando, a la
espera de una opción de prueba. Dependiendo de la opción seleccionada es el controlador
que llama. Esto se muestra en la Figura 4.5.
4.4 Conclusiones
El manejo de controladores para el diseño de software en el módulo basado en la
RDT proporciona portabilidad al firmware, lo cual permite el uso de estos para diversas
aplicaciones, dándole con ello flexibilidad al programa. Esto es especialmente cierto
cuando los programas se vuelven complejos y extensos.
Este mismo esquema también le concede confiabilidad al software, ya que se
puede actualizar el controlador sin la necesidad de modificar el flujo del programa
principal, lo cual hace que en aplicaciones donde el tiempo de diseño es critico vuelva
invaluable esta metodología de programación.
65
Capítulo 4
Diseño de Software
La tolerancia a fallas de los sistemas es una de las características más buscadas en
la actualidad en donde el empleo de microcontroladores monitorean y controlan procesos
casa vez más críticos, esta característica se implementa en el diseño con el uso de
temporizadores y candados para evitar que el programa se quede ciclado en alguna rutina
o proceso.
El módulo basado en la RDT aquí desarrollado al implementar una metodología
de programación basado en eventos de usuario, uso de controladores y un lenguaje de
alto nivel cumple con las necesidad de tener instrumentos confiables, flexibles ante los
cambios de tecnología y al mismo tiempo tolerante a fallas. Esto en cuanto al firmware.
Aunque no se busca subestimar el desarrollo de software para uso en una PC, el
presente desarrollo sólo esta enfocado al desarrollo de la programación embebida.
Figura 4.5 Flujo de llamada a los controladores por los eventos
66
Capítulo 5
Pruebas y Resultados
Capítulo 5 Pruebas y Resultados
5.1 Introducción
Para determinar el comportamiento de la técnica de RDT se recurrió a la
implementación de distintos tipos de diseños electrónicos y analizar su comportamiento
con distintos tipos de tecnologías de
compuertas electrónicas. En la Figura 5.1 se
muestra el circuito del generador, base de las pruebas de caracterización.
5.2 Caracterización de la señal RDT
Debido a que se necesita una señal de frecuencia estable pero de ciclo de trabajo
variable para obtener un pulso de 40 ns, se incluyó esta etapa con el fin de contar con
dicho pulso, pero con la suficiente anchura como para obtener una resolución menor a 10
metros. Esto se logró de forma parcial, ya que la medición resultó un poco ambigua para
67
Capítulo 5
Pruebas y Resultados
longitudes de cable de 10 metros y menores a esta longitud de cable. En esta etapa se usó
el IC 74LS123, debido a que es de bajo costo y tiene buenas prestaciones, dicho
integrado proporciona anchos de pulso de hasta 40 ns, y un voltaje de nivel TTL. Este IC
cuenta con pines para la programación del ancho de pulso, el cual es dependiente de los
valores de Rext y Cext. Ya que Cext<1000 pF, el ancho de pulso está dado por:
t W = 6 + 0.05C ext (pF) + 0.45R ext (KΩ)C ext + 11.6R ext
(1)
Tenemos que Rext fue seleccionado por medio de un potenciómetro, donde Rext<
5KΩ. Usando la relación (1), tenemos un ancho de pulso de ≈ 40 ns.
El diagrama eléctrico y la configuración de pines, la tenemos en la
Figura 5.1.
Figura 5.1 Diagrama del generador.
68
Capítulo 5
Pruebas y Resultados
5.3 Pruebas de caracterización de señal RDT
5.3.1 Condiciones de prueba
Las pruebas de caracterización en laboratorio se realizaron bajo las siguientes
condiciones:
• Cable en terminación abierta.
• Cable en terminación en corto.
• Interferencia mutua.
• Derivaciones.
Estas condiciones se tomaron debido al hecho de que son las fallas más comunes
en los cables de comunicación, y las que el dispositivo RDT pretende detectar y medir.
Ver Figura 5.2.
Figura 5.2 Prueba de fallas más comunes.
69
Capítulo 5
Pruebas y Resultados
La configuración general de la prueba se muestra en la Figura 5.3
Figura 5.3 Configuración general de prueba.
Estas pruebas se realizaron en cables de longitudes de 5, 7, 10 y 25 metros.
Básicamente se midió el tiempo entre el flanco de salida del pulso y el flanco de llegada
de la señal reflejada, a este valor le restamos el retardo debido a la capacitancia
distribuida del cable. Debido a que la señal que se puede observar en el osciloscopio
corresponde al tiempo de ida y regreso de la onda, el tiempo obtenido es necesario
dividirlo entre dos. Mediante el empleo del factor nominal de propagación y una simple
relación de velocidad, se obtiene la distancia hasta el cambio en la impedancia del cable.
La siguiente relación nos muestra esto:
70
Capítulo 5
d=
Pruebas y Resultados
v(0.7) t r − retardo
2
(2)
Donde,
d= distancia hasta la discontinuidad
v= velocidad de la luz
tr=tiempo transcurrido entre la onda incidente y la reflejada
Para el caso del cable UTP nivel 5 marca Belden que fue utilizado se tiene un
factor nominal de propagación de 0.7 y un retardo de 32.5 ns por cada 100 metros de
cable.
5.3.2 Resultados de la caracterización
5.3.2.1 Cable de 5 metros
Para el cable de 5 metros se obtuvo un tiempo de recorrido de la señal (tr) de
54.55 ns, utilizando la fórmula para distancia tenemos:
d=
v(0.7)t r − retardo 2.1x10 8 * (54.55ns − 1.625ns )
=
= 5 .5 m
2
2
El retardo de propagación (retardo) se obtiene mediante una simple regla de tres y
de forma similar se determina los retardos para cada una de las longitudes de cable.
La Figura 5.4 nos muestra las mediciones respectivas de a) cable abierto y b)
cable en corto para 5 metros así como c) Interferencia mutua (crosstalk) para esta
longitud. Las mediciones se hicieron a 2v/div y 50 ns/div.
71
Capítulo 5
Pruebas y Resultados
a)
b)
Figura 5.4 Señales para cable de 5m; 2 V/div, 50 ns/div.
5.3.2.2 Cable de 7 metros
Para una longitud de 7 metros, tenemos un tr de 65.1ns, aplicando la relación (1),
tenemos una distancia de 6.59 metros. Las formas de onda respectivas para a) cable
abierto b) en corto y c) crosstalk, se muestra en la Figura 5.5. Se tiene 1 v/div y 200
ns/div.
72
Capítulo 5
Pruebas y Resultados
a)
b)
Figura 5.5 Señales para cable de 7m; a) y b) 1 V/div, 200 ns/div; c) 2 V/div, 100
ns/div.
5.3.2.3 Cable de 10 metros
Para una longitud de 10 metros tenemos un tiempo tr=91.33ns, lo cual nos da una
distancia medida de 9.24 metros. La Figura 5.6 nos muestra las formas de onda. En esta
figura se tiene 1 V/div y 100 ns/div
73
Capítulo 5
Pruebas y Resultados
a)
b)
Figura 5.6 Señales para cable de 10m; a) y b) 1 V/div, 100 ns/div; c) 2 V/div, 100
ns/div.
5.3.2.4 Cable de 25 metros
Para 25 tenemos un tr de 234.09 ns, lo cual nos da una distancia medida de 23.72
metros. Las formas de onda las tenemos en la Figura 5.7. Tenemos 1 v/div y 100 ns/div
74
Capítulo 5
Pruebas y Resultados
a)
b)
Figura 5.7 Señales para cable de 25m; a) y b) 1 V/div, 100 ns/div; c) 2 V/div, 100
ns/div.
5.3.2.5 Pruebas con derivación
Por ultimo se hicieron cuatro pruebas más en donde se conectó una derivación al
cable a 7 metros de distancia del conector, la longitud del cable es de10 metros.
Las pruebas con sus respectivas formas de onda que se obtuvieron son las
siguientes:
• Terminación abierta y derivación abierta (Figura 5.8 a).
75
Capítulo 5
Pruebas y Resultados
• Terminación cerrada y derivación abierta (Figura 5.8 b).
• Terminación cerrada y derivación cerrada (Figura 5.9).
• Terminación abierta y derivación cerrada (Figura 5.9).
a)
b)
Figura 5.8 a) Terminación abierta y derivación abierta, b) Terminación cerrada y
derivación abierta; 1 V/div, 50 ns/div.
Figura 5.9 Terminación cerrada y derivación abierta, 1 V/div, 50 ns/div.
76
Capítulo 5
Pruebas y Resultados
Figura 5.10 Terminación abierta y derivación cerrada, 1 V/div, 50 ns/div.
5.4 Conclusiones
Como se puede ver en las distintas pruebas que se llevaron a cabo, la técnica de la
RDT, es una forma muy precisa para la determinación de los cambios en la impedancia
de un cable.
En el desarrollo de las pruebas descritas en este capítulo se puede ver que para
cables de longitudes iguales o mayores de 10 metros (figuras 6 y 7) la determinación de
la fallas se puede determinar de una forma más clara. Para longitudes menores (figuras 4
y 5) se tienden a traslapar el pulso de envío con el pulso reflejado. Esto es a causa del
ancho de pulso utilizado para esta aplicación, 40 ns. Ancho de pulso menores, no se
pudieron obtener con la electrónica utilizada.
En el caso de las pruebas con derivaciones se puede ver que dependiendo de la
distancia a la cual se presenta la derivación es la precisión con la que se puede determinar
el cambio de impedancia. En el caso de esta prueba se utilizó un cable de longitud de 10
metros ya que es el límite de nuestro desarrollo. En esta prueba se puede determinar la
naturaleza de la derivación con claridad, lo cual resulta útil en el caso de aplicaciones
contra la detección de ilícitos en el caso específico de líneas de distribución o bien para
determinar el tipo de derivación presente en el cable.
77
Capítulo 5
Pruebas y Resultados
En el diseño propuesto no se incluyen las señales determinadas por el RDT, sino
que a partir de éstas se determina el tipo de falla. Las distintas señales que producen cada
una de las fallas que se analizaron: cable en corto circuito, cable abierto y derivaciones;
están identificadas y actualmente existen en el mercado dispositivos especializados en el
análisis de estas señales. Uno de estos dispositivos son los llamados analizador de redes
el cual esta cuesta arriba de los 5000 dólares y su uso esta limitado casi exclusivamente a
la certificación de estas redes y no al de la determinación de fallas en campo.
78
Capítulo 6
Conclusiones
Capítulo 6 Conclusiones
6.1 Importancia de la Reflectometría en el Dominio del Tiempo
La técnica de Reflectometría en el Dominio del Tiempo representa un campo de
estudio muy amplio para las aplicaciones en donde se necesite detectar fallas y medir
parámetros en cables. En el ámbito de las comunicaciones es de suma importancia su
conocimiento debido a que los sistemas de cableado estructurado son sensiblemente
afectados por fallas en la estructura de cableado, las cuales representan el 70% de las
causas de paro, y a esto hemos de agregar el aumento en los costos de mantenimiento que
esto representa. Así mismo hay una tendencia a continuar con la utilización de las redes
alambradas todavía por algunos años, esto será hasta que nuevas tecnologías,
especialmente las inalámbricas sean competitivas en cuanto a costo y efectividad, así
como la normalización de sus estándares.
79
Capítulo 6
Conclusiones
Así mismo es importante contar con desarrollos orientados a la RDT, para
explorar nuevos campos de aplicación, especialmente enfocados a la detección en cables
de diferentes tipos, que transporten señales no sólo digitales como es el caso de las
comunicaciones, sino cables de distribución de electricidad, fibra óptica, etc. Aunque en
la actualidad existe mucha investigación en cada una de las áreas mencionadas, en
nuestro país no hay datos concretos de centros de desarrollo en cuanto a la técnica de
RDT, por lo cual todas o casi todas las aplicaciones tienen que ser importadas.
Este desarrollo debe de ser fundamentado con la teoría ya conocida de líneas de
transmisión, y complementada, como en el caso del presente estudio, con las nuevas
metodologías de programación y tecnologías de desarrollo electrónico.
En el presente trabajo, se propone una metodología de programación estructurada
y orientada a eventos, lo cual representó un esfuerzo en cuanto a conocimientos de
programación de lenguajes de alto nivel.
Asimismo, se exploraron nuevas tecnologías, esto con el fin de ofrecer una
herramienta con un grado de disponibilidad amplio, y no caer en el diseño con
componentes ya obsoletos. El diseño con el MC9S12A128 de motorola esta considerada
como una tecnología “madura”. Sin embargo, con el esquema propuesto de diseño
modular se obtiene una migración rápida a tecnologías nuevas.
6.2 Hardware
El presente trabajo concluyó siendo el diseño de un RDT basado en un
microcontrolador, lo cual está de acuerdo al objetivo inicial del proyecto, sin embargo el
diseño final pasó por distintas fases de análisis de componentes. Entre las características
más importantes de hardware que se tiene, se pueden mencionar las siguientes:
¾ Electrónica de uso corriente y bajo costo
80
Capítulo 6
Conclusiones
¾ Nivel de comercialización en el mercado del microcontrolador disponible
¾ Circuitos comparadores rápidos
¾ Diseño de PCB de acuerdo a las frecuencias manejadas
¾ Fácil migración a tecnologías nuevas
Es importante mencionar que la necesidad de detección de fallas en cables de
comunicación, implica el uso de tecnologías rápidas, así como de electrónica
especializada. En este tenor se decidió por el uso de un convertidor A/D para la
adquisición del pulso de retorno para el caso del parámetro de interferencia mutua
(NEXT). Éste cuenta con 6 canales de adquisición y, aunque no es muy rápido, el uso de
sus canales en cascada
sugería un paliativo para esta dificultad. Sin embargo esta
dificultad no pudo ser subsanada, por lo cual, en un futuro se necesitará del uso de un
convertidor rápido, aunque esto implica un costo mayor.
6.3 Software
La parte medular del RDT es el diseño de software, para esto se necesitó del
conocimiento de programación estructurada de alto nivel, lo cual se llevó a cabo
mediante el lenguaje C, usando el compilador de motorola “CodeWarrior” para desarrollo
electrónico.
El desempeño del microcontrolador usando una metodología orientada a eventos
se optimiza, ya que no se carga el micro con tareas de sondeo, las cuales la mayor parte
del tiempo no se ejecutan, pero se tienen que sensar. Con esta metodología el
microcontrolador puede permanecer en un estado básico y sólo salir de este estado al
momento de llevarse a cabo un evento de usuario, como puede ser la presión de una tecla,
etc.
La confiabilidad del software se obtiene del uso de lazos de control temporizados,
los cuales evitan que el sistema se mantenga en una subrutina por más tiempo que el
81
Capítulo 6
Conclusiones
programado, de esta manera se garantiza que el sistema siempre “saldrá” de una
subrutina, y que en caso de una llamada a ésta y no terminarse el evento, éste es abortado.
6.4 Pruebas y resultados
Las pruebas de caracterización mostraron la efectividad de la técnica RDT para la
detección de fallas en cables de red.
Para distancias mayores de 10 metros el grado de error estaba entre el 3% y 5%,
lo cual es una marca aceptable para un prototipo de prueba. Sin embargo a distancias
menores, el reto viene a ser tecnológico, ya que implica el uso de electrónica más rápida,
así como de un diseño enfocado a altas frecuencias. Todo esto implica un mayor cuidado
en el diseño del PCB, interferencias externas (ruido eléctrico, EMI, etc.) y, por supuesto,
de la electrónica a usar.
Entre las limitantes principales encontramos el uso de convertidores analógicodigitales rápidos, los cuales, como se menciona en el capitulo 3 son costosos. El
microcontrolador MC9S12A128 utilizado cuenta con canales de conversión A/D, sin
embargo tienen tiempos de muestreo demasiados lentos para esta aplicación. Esto lleva a
la conclusión que para el desarrollo de un equipo a bajo costo es necesario la utilización
de la técnica para la detección y no para la captura completa de la forma de onda, ya que
eso implicaría otro tipo de instrumento, como puede ser un analizador de redes.
6.5 Aportación del trabajo
Este trabajo resuelve parte de la problemática de detección de fallas en redes de
comunicación en el nivel de cableado y contribuye a caracterizar sus parámetros más
importantes coadyuvando con ello a mejorar la confiabilidad y la productividad de la
actividad, especialmente en aplicaciones en campo.
82
Capítulo 6
Conclusiones
Es importante la investigación y asimilación de tecnologías, como es el caso de la
RDT, para explorar nuevas aplicaciones y mejorar la ya existente en donde la
reflectometría encuentra aplicación. El presente trabajo mediante este estudio propone
beneficiar al Cenidet con el desarrollo de tecnología aplicada, relacionada con la
transmisión de señales a través de cables y con la caracterización de sus parámetros más
relevantes, obteniendo con ello infraestructura de pruebas para caracterización y
diagnóstico de fallas en redes de comunicaciones.
El presente trabajo aporta una valiosa ayuda al desarrollo de investigación en el
área de Sistemas Digitales, ya que el presente trabajo aborda el uso y desarrollo de
software en lenguajes de alto nivel para sistemas embebidos. Hoy por hoy estos sistemas
están difundidos por su capacidad de producir sistemas complejos mediante la
reutilización de software, así como su alto grado de tolerancia a fallas mediante el uso de
una programación orientada a eventos. Es importante hacer notar que la programación en
lenguaje ensamblador para microcontroladores de la gama utilizada es en lo práctico
imposible. Además los fabricantes incluyen códigos de programa que reconocen
comandos propios de los lenguajes de alto nivel como el C.
6.6 Trabajos futuros
Se propone como mejoras al presente trabajo:
¾ Incluir en el diseño del RDT la técnica de un cuarto de longitud de onda,
mostrada en el apartado 1.4, como complementaria en la detección de
fallas, ya que su uso no está difundido, y su estudio es relativamente
nuevo.
¾ El desarrollo del RDT con otras tecnologías como son los FPGA, DSP,
etc.
¾ Realización de pruebas exhaustivas del módulo desarrollado y su
implementación en un ambiente de trabajo real.
83
Capítulo 6
Conclusiones
¾ El desarrollo de una interfaz hombre-máquina en un ambiente visual.
¾ Incursionar en otros campos de aplicación de la RDT, especialmente en
aquellos de capital importancia para el país, como es la industria del
petróleo. En este caso la RDT puede ser utilizada para la determinación de
averías, fugar, etc., en un ducto. Así mismo en la industria eléctrica para la
detección de ilícitos como es una derivación en un cable de electricidad.
Todo eso actualmente esta siendo desarrollado por distintos sectores del
país, sin embargo es un campo sumamente amplio y con grandes
posibilidades.
84
Apéndice A
Apéndice A
Simbología y Abreviaciones
α
β
γ
λ
C
EM
f
G
L
LT
Mbps
R
RDT
TDR
TEM
TIA/EIA
UTP
Vf
Vp
VPN
Zo
Coeficiente de atenuación
Coeficiente de desfase
Constante de propagación
Longitud onda
Capacitancia
Ondas electromagnéticas
Frecuencia
Conductancia
Inductancia
Línea de transmisión
Megabits por segundo
Resistencia
Reflectometría en el Dominio del Tiempo, también usado como
Reflectómetro en el Dominio del Tiempo
Siglas en inglés de Time Domain Reflectometry
Ondas electromagnéticas transversales
Siglas en inglés de Telecommunications Industry
Association/Electronic Industries Alliance
Siglas en inglés de Unshielded Twisted Pair
Factor de velocidad
Velocidad real de propagación
Siglas en inglés de Velocity Propagation nominal
Impedancia característica
85
Apéndice B
Apéndice B
Bibliografía general
[1]
Alastair Clunie. “Propagation Velocity Factor (PVF)”, Technical Bulletin by
Bicotest. September 1997.
[2]
Andrew S. Tanenbaum. Redes de computadoras. David Morales Peake. (3a. ed.;
México. Prentice Hall Hispanoamericana,1997) pp. 1-5
[3]
Fei-Chiu Huang and Charles H. Dowding, “Telemetric and Multiplexing
Enhancement of Time Domain Reflectometry Measurements”
[4]
Gunnar Englund. “Build your own cable radar”.(EN: Electronic Design, October
1 de 1998) pp. 97-98
[5]
Henrick H. Nissen and Per Moldrup. “Theoretical Background for the TDR
Methodology”, Symposium: Time Domain Reflectometry Applications in Soil
Science held at the Research Centre Foulum. September 1994.
[6]
James M. Atkinson, “TDR Tutorial-Introduction to Time Domain Reflectometry”,
Granite Island Group, 1998.
[7]
James M. Atkinson. “TDR Tutorial and Riser Bond TDR Product Review”,
Granite Island Group, 1998.
[8]
James R. Adrews. “Time Domain Reflectometry”, Symposium and Workshop on
Time Domain Reflectometry in Environmental, Infrastructure, and Mining
Applications held at Northwestern University, Evanston, Illinois. September
1994.
[9]
Joseph R. Kinsley. “Why testing Cat. 5 cable in the home makes sense”.(EN:
CEE news, 52 (11), october 2000) pp. 30-32
86
Apéndice B
[10]
Kenneth M. True, “Long transmission Lines and Data Signal Quality”, National
Semiconductor, Application Note 805. March 1992.
[11]
Kenneth M. True, “Reflections: Computations and Waveforms”, National
Semiconductor, Application Note 807. March 1992.
[12]
Kenneth M. True. “Data Transmission Lines and Their Characteristics”, National
Semiconductor, Application Note 806. April 1992.
[13]
Mark Johnston. “New Networking Applications and Their Impact on Data
Cabling”, Microtest. August 2000.
[14]
Paul Rosenberg. “Residential Networking”.(EN: CEE news, 53 (1), January
2001) pp. 34-36
[15]
Roman D.J. Irazuzta. “Cableado Estructurado: una solución en la era de la
autopista informática”, Discar, S.R.L. Mayo de 1998.
[16]
Stephen Kempainen, “Signals in the Futurebus+ Backplane”, National
Semiconductor, Application Note 738. January 1991.
[17]
Wayne Tomasi. Sistemas de Comunicaciones Electrónicas. Virgilio García
Bisogmo (2a Ed México; Prentice Hall, 1997), pp 318-352
[18]
Paul Kish. “Copper Cables, Beyond Category 5”, Nordx. 1997.
[19]
Simon S. Ang. Power-switching converters. (Ed. Dekker, 1995), p. 57
[20]
Pedro J. Medelius y Howard Simpson, “Impedance-Based Cable Tester”, NASA,
1998.
[21]
Angel Treviño Santoyo, “Reflectometría por Correlación Complementaria en
Sistemas de Comunicación por Fibra Óptica”, Cenidet, 1995.
87
Apéndice C
Apéndice C
Vistas preliminares del PCB
C.1 Top layer
88
Apéndice C
C.2 Bottom layer
89
Apéndice C
C.3 Top Overlay
90
Apéndice C
C.4 Drill Guide
91
Apéndice C
C.5 Top paste mask
92
Apéndice C
C.6 Bottom paste mask
Nota: La escala no es 1:1, aproximadamente 1: 0.8
93
Apéndice D
Apéndice D
Lista de Materiales
Used
4 0.1u
6 0.1uF
6 0.01uF
2 0.1uF
2 0.33uF
5 0.047u
9 1N4001
5 1k
1
1
1
1
1
5
1u
1uF
2.2uF
2N2905A
2k
3.3k
1
1
1
1
2
7
4.7k
4.7u
4k
5.6p
10K
10u
7 10u
2
1
1
2
1
1
15k
16Mhz
20k
22pF
47K
1 74AC74
1 74LS373
2
1 100k
1 220k
2
Part Type
Designator
C7 C39 C40
C41
C27 C28
C29 C30
C31 C32
C33 C34
C35 C36
C37 C38
C43 C47
C42 C46
C2 C3 C4
C5 C6
D1 D2 D3
D4 D5 D6
D7 D8 D9
R4 R5 R6
R7 R23
C24
C45
C44
Q1
R25
R14 R15
R16 R17
R18
R21
C25
R28
C1
R13 R26
C17 C18
C19 C20
C21 C22
C23
C8 C9 C10
C11 C12
C13 C14
R9 R10
Y1
R27
C15 C16
47 R2
R22
Footprint
CAPX7R
Capacitor
CAPX7R
Capacitor
CAPX7R
Capacitor
TANTALUM
TANTALUM
CAPX7R
DIODO
AXIAL0.3
CAPELE
TANTALUM
TANTALUM
TO39
AXIAL0.3
AXIAL0.3
AXIAL0.3
CAPX7R
AXIAL0.3
CAPX7R
AXIAL0.3
CAPELE
IC1
Default Diode
Resistor
Capacitor
Bi-Polar Capacitor
Bi-Polar Capacitor
PNP Bipolar Transistor
Capacitor
Capacitor
Capacitor
Capacitor
AXIAL0.3
XTAL1
AXIAL0.3
CAPX7R
AXIAL0.3
AXIAL0.3
Resistor
Crystal
DIP20
AXIAL0.3
AXIAL0.3
AXIAL0.3
AXIAL0.3
94
Bi-Polar Capacitor
Bi-Polar Capacitor
Capacitor
CAPX7R
DIP14
IC6
100 R3 R24
R12
R11
470 R8 R19
Description
Capacitor
Resistor
DUAL D-TYPE POSITIVE EDHETRIGGERED FLIP-FLOP
OCTAL TRANSPARENT LATCH 3Z
OUTPUT;D FLIP-FLOP WITH CLEAR
Resistor
Resistor
Resistor
Apéndice D
1
1
1
1
1
4
470p
ADS7864
BDM
CLOCK_E
CON2
CON2
1
1
1
1
1
1
2
CON3
HEADER 8X2
ICL8069DCZR
LCD CONTRASTE
LCD_M1632
LED
LM78L05
C26
U11
J7
W4
J14
J8 J9 J10
J11
J2
JP1
IC5
J6
J5
DS1
U5 U12
CAPX7R
SOCKETADS7864TQFP
HDR2X3
HDR1X3
CONECTOR.2
HDR1X2
Capacitor
HDR1X3
HDR2X8
TO92
HDR1X3
TM162AD2
LED
TO220V
Connector
Connector
Connector
Connector
Connector
3-terminal positive regulator fixed 5 volts
1 MAX479
IC3
DIP14
QUAD, SINGLE SUPPLY PRECISION
OPAMPS
1 MAX913
IC2
DIP8
SINGLE, ULTRA FAST LOX POWER
PRECISION TTL COMPARATOR
1 MAX7528
1 MC9S12A128_QFP80
1 MC74F04
IC4
U6
U9
DIP20
A128
DIP14
1
1
1
1
1
1
1
1
1
8
1 RJ45
1 RPOT1
U2
IC7
W1
W2
W5
R20
S3
U3
U4
RLY1 RLY2
RLY3 RLY4
RLY5 RLY6
RLY7 RLY8
J1
R1
1
1
1
1
1
2
1
1
U7
J12
J4
J13
U10
S1 S2
U8
J3
DIP16
HDR2X4
HDR1X3
DB9/F
DIP16
PUSH
DIP14
HDR1X3
1 ULN2803A(18)
1 VREGEN
1 XCLKS
U1
W6
W3
DIP18
HDR1X3
HDR1X3
1 XO-523BE
XTAL1
MC74HC123A
MC7912
MODA
MODB
MODC
POT1
PUSH-B
REG1117-3.3
REG1117-5
RELAY
RS232
RS232_EN
RX SEL
SERIAL PORT
SN74HC76N
SW-PB
TL074J
TX SEL
DIP16
TO220V
HDR1X3
HDR1X3
HDR1X3
POTT93YA
PUSH
REG1117
REG1117
RAS1210
CONECTOR_RJ45
POTT93YA
DIP8
95
CMOS DUAL 8-BIT BUFFERED
MULTIPLIYING DACS
Hex Inverters
RETRIGGERABLE MONOSTABLE
MULTIVIBRATOR
REGULADOR DE VOLTAJE NEGATIVO
Connector
Connector
Connector
Potentiometer
REGULADOR DE VOLTAGE DE 3.3V
REGULADOR DE VOLTAGE DE 3.3V
SPDT Relay
Connector
Potentiometer
+5V POWERED, MU TICHANNEL RS-232
DRIVERS/RECEIVERS
Connector
Dual J-K Flip-Flop with Clear and Preset
Low-Noise JFET-Input Operational Amplifier
Connector
HIGH-VOLTAGE,HIGH-CURRENT
DARLINTON ARRAYS
Connector
Connector
CLOCK OSCILLATOR 3.3 VOLT 16M
Apéndice E
Apéndice E
Especificaciones del microcontrolador MC9S12A128
96
Apéndice E
97