Módulo de manipulación sin contacto, ultrarrápido
Anuncio

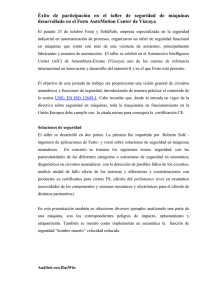
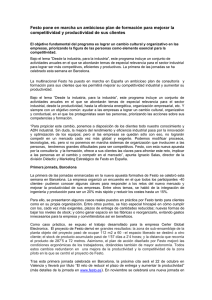
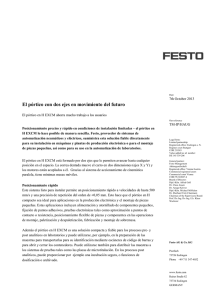
Fecha 12/03/13 Nuestra referencia Módulo de manipulación sin contacto, ultrarrápido Pórtico en H_ES Pórtico en H cartesiano para piezas frágiles El pórtico en H ultrarrápido está rompiendo todos los récords de velocidad. Es un 30% más rápido que cualquier módulo de manipulación cartesiano convencional – con costes de adquisición similares. Festo ha desarrollado este módulo de manipulación ultrarrápido para operaciones de montaje dinámicas en los sectores de fotovoltaica, electrónica y manipulación de piezas pequeñas, y donde se requiera posicionar piezas pequeñas y ligeras de forma rápida y flexible. Su referencia Este nuevo tipo de pórtico 3D/de superficie plana, cubre un área de trabajo cuadrada considerablemente más grande que la de los robots con cinemática delta, que sólo pueden operar en áreas redondas o en forma de riñón. Otras desventajas de los robots delta son los elevados costes, el peso de la instalación de alrededor de 150 kg y el espacio necesario. Perfil bajo, rápido y preciso Por otro lado, el pórtico en H ultrarrápido tiene un perfil muy bajo, un bajo centro de gravedad y una base más simple que la de los rápidos robots delta. Las características de aceleración y deceleración optimizadas permiten alcanzar una precisión de 0,1 mm durante la aspiración y agarre. Gracias a un truco de ingeniería, el pórtico en H alcanza una velocidad de 5 m/s con una aceleración de 50 m/s². Los dos ejes de correa dentada EGC están conectados al travesaño con una simple correa dentada giratoria alrededor del eje de accionamiento. La correa es impulsada por dos servomotores EMMS. Un efecto secundario positivo es que el motor no necesita ser movido dentro del área X-Y con sus dos grados de libertad de movimiento. Y las cargas reducidas facilitan un movimiento rápido, dinámico y con menos desgaste. Sujeción con Bernoulli R.M. de Barcelona, hoja 20866, folio 96, tomo 2109, libro 1509, sección 2ª, Inscripción 1ª C.I.F. A-08270084 Sociedad Unipersonal Festo Pneumatic, S.A. Avenida Granvia, 159 Distrito Económico Granvia L´H 08908 Hospitalet de Llobregat Barcelona Tel. 901 24 366 0 Fax 902 24 366 0 E-mail info_es@festo.com www.festo.es El módulo de elevación giratorio del pórtico en H ultrarrápido también es ingenioso. Está compuesto por un husillo hueco que permite el paso de la energía para el módulo frontal y forma el eje Z en el que se encuentra la pinza para sujetar las piezas. El módulo de elevación giratorio acelera a 20 m/s² hasta alcanzar una velocidad de 1,5 m/s. La ventosa Bernoulli en el frontal del módulo de elevación giratorio es la solución ideal para la manipulación de módulos solares y otras piezas frágiles. Además, permite el uso de pinzas mecánicas y de vacío con piezas de entre 0 y 2 kg de peso. Aplicando sobrepresión a la pinza Bernoulli, ésta toma las piezas tales como las obleas de silicio prácticamente sin contacto. Simultáneamente se genera una depresión en la superficie a coger para aspirar la oblea. De este modo la pieza es atraída hacia la pinza hasta que la carga aplicada, la fuerza de contrapresión de la tobera y la atracción que resulta de la fuerza de aceleración del fluido están en equilibrio. Esto ocurre a una cierta distancia (aprox. 0,5 a 3 mm) entre la pinza y la superficie a sujetar, por lo que el objeto se mantiene en su sitio sin contacto. Robótica para soluciones de sistemas El sistema de manipulación se basa en el control robótico CMXR. Combina sistemas mecánicos, y la técnica de accionamiento y de control eléctrico para formar una solución cinemática completa y coordinar movimientos muy dinámicos en el espacio 3D. La unidad CMXR también hace a las veces de interfaz con unidades de control superiores, y a la vez, con los controladores de motor de los ejes y los terminales de válvulas. Y esto no es todo. El controlador también permite la inclusión de sistemas de visión como el Sistema de Visión Compacto inteligente SBO..-Q de Festo. Las aplicaciones con objetos en movimiento también pueden realizarse con la ayuda del sistema de visión y los sistemas de transporte disponibles La solución de sistema lista para instalar se suministra directamente para la máquina, completamente montada y probada. Todos los datos de ingeniería pertinentes y diagramas de circuitos también se suministran, junto con un funcionamiento integral y una garantía de precio fijo. Los usuarios no simplemente reciben un hardware en forma de montaje o subsistema listo para instalar, sino un paquete completo de creación de valor. Las soluciones completas reducen la carga de trabajo para el personal técnico, mantienen a un mínimo los costes de ingeniería, simplifican el proceso de adquisición y reducen los costes del proceso. Fuente: Foto de prensa Festo PVSEC 0112 H-Portal 1.tif Texto de la fotografía: Manipulación ultrarrápida sin contacto: el pórtico en H cartesiano ultrarrápido para aplicaciones fotovoltaicas bate todos los récords de velocidad. Es un 30% más rápido que cualquier sistema de manipulación cartesiano convencional mientras que sus costes de adquisición son similares. (Foto: Festo) Fuente: Foto de prensa Festo PVSEC 0112 H-Portal 2.tif Texto de la fotografía: El innovador pórtico tridimensional/de superficie plana cubre un área de trabajo cuadrada considerablemente más grande que la de los sistemas de robot con cinemática delta, que sólo pueden operar en áreas redondas o en forma de riñón (Foto: Festo) Fuente: Fotos de prensa Festo PVSEC 0112 H-Portal 3.tif y PVSEC 0112 H-Portal 4.tif Texto de la fotografía: Sistema de sujeción sin contacto: el módulo elevador giratorio se acelera a 20 m/s² hasta una velocidad de 1,5 m/s. La pinza de vacío Bernoulli es la solución ideal en el frontal del módulo elevador giratorio para la manipulación de módulos solares u otras piezas frágiles. (Fotos: Festo) El texto de prensa y las fotos están disponibles también online en www.festo.com/press.