6 transmisin y transformacion de movimiento
Anuncio

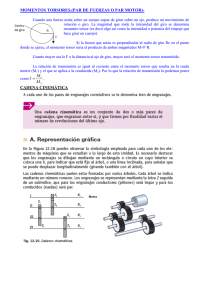
6.MECANISMOS 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. 11. 12. Mecanismos de transmisión y transformación de movimiento Palanca Polea fija Polipasto Poleas con correas, ruedas de fricción, transmisión por cadenas y engranajes El piñón-cremallera La cruz de malta La biela-manivela; el cigüeñal-biela La excéntrica La leva El trinquete El tornillo sinfín-corona 13. Ampliación: Estudio cinemático y dinámico detallado de los engranajes 1.MECANISMOS Un mecanismo de transmisión y transformación de movimientos es un sistema que recibe un movimiento y una fuerza y devuelve otro, normalmente distinto. Las transformaciones de movimiento pueden ser de los siguientes tipos: a. Movimiento de giro => Movimiento de giro b. Movimiento rectilineo => Movimiento de giro c. Movimiento de giro => Movimiento rectilineo d. Otros tipos de transformaciones de movimiento También se clasifican en reversibles o no reversibles dependiendo de si la entrada y la salida pueden intercambiarse o no. 2.PALANCA Una palanca es una barra rígida que gira en torno a un punto de apoyo o articulación. En un punto de la barra se aplica una fuerza F con el fin de vencer una resistencia R que actúa en otro punto de la barra. Se verifica siempre que: F.d=R.r A d se le llama brazo motor y a r brazo resistente. Existen tres tipos de palancas Primer orden r Segundo orden d d r R Tercer orden r d F R El punto de apoyo está entre la F y la R El efecto de la fuerza puede verse aumentado o disminuido F La R está entre el punto de apoyo y la F El efecto de la fuerza siempre se ve aumentado F R La P está entre el apoyo y la F El efecto de la fuerza siempre se ve disminuido 3. LA POLEA FIJA La polea fija está en equilibrio cuando la fuerza aplicada F es igual a la resistencia R F=R F R 4. POLIPASTOS El polipasto es un conjunto de poleas. El montaje tiene la finalidad de disminuir la fuerza necesaria para vencer grandes resistencias. F=R/2 F=R/3 5. POLEAS CON CORREAS, RUEDAS DE FRICCIÓN, TRANSMISIÓN POR CADENAS Y ENGRANAJES a)Relación de transmisión Sólo podemos hablar de relación de transmisión cuando al sistema entra un movimiento de giro y sale también un movimiento de giro. Se define como: Rt = rpmsalida ns = rpmentrada ne Si Rt>1 => El mecanismo es multiplicador de velocidad Rt<1 => El mecanismo es reductor de velocidad Las velocidades de giro como vemos se suelen medir en rpm (revoluciones por minuto) En algunos libros en vez de llamar Rt a la relación de transmisión se le designa por la letra K. En otros libros la fórmula se considera al revés, es decir, Rt=ne/ns, pero nosotros usaremos la fórmula antes descrita. b) Poleas con correas b.1)Introducción Una polea es una rueda acoplada a un eje con una llanta exterior a la que se acopla una correa exterior sujeta a la llanta por la propia tensión de la correa. Al cuerpo de la rueda se le llama cubo. Eje Polea El mecanismo consiste en como mínimo dos poleas unidas por una correa que transmite el movimiento de un eje a otro. Se recibe un movimiento circular y se devuelve otro movimiento tambien circular Existen diversos tipos de transmisión cinemática entre las poleas: -Entre ejes paralelos: *Transmisión directa (1) *Transmisión inversa (2) -Entre ejes no paralelos (3) b.2) Las correas Se usan para transmitir la potencia y el movimiento de giro entre los ejes. Existen diversos tipos: Planas Trapezoidales Circulares Dentadas Eslabonadas b.3) Trenes de poleas Son mecanismos que usan más de dos poleas. Se emplean en los siguientes casos: -Grandes distancias entre los ejes a conectar -Cambios de velocidades muy grandes que no es adecuado o posible conseguir en una sola etapa. -Relación geométrica entre los ejes complicada. b.4) Ventajas e inconvenientes de las poleas con correas: Ventajas: -Baratas -Bajo ruido -Permiten conectar ejes con disposiciones geométricas variadas Inconvenientes: -Presentan deslizamientos (las correas deslizan sobe las llantas cuando los esfuerzos a transmitir son altos). Por tanto están limitadas en cuanto a los esfuerzos a transmitir -Necesitan cambio periódico de las correas -Hay que tensar las correas periódicamente -No pueden trabajar en ambientes corrosivos (las correas se degradan). b.5) Estudio cinemático Consideremos dos poleas acopladas mediante una correa. La polea que arrastra se llama CONDUCTORA y la arrastrada se llama CONDUCIDA. Consideraremos la siguiente notación: n : velocidades de giro en r.p.m. φ : diámetros de las poleas en cm. e ó 1: entrada o conductora s ó 2: salida o conducida Se verifica siempre que no haya deslizamiento que : ne.φe = ns.φs. ns Rt = ne Rt = φe φs ne ns φe φs Esta fórmula sólo es valida cuando tenemos unicamente dos poleas. Nunca es válida en trenes de poleas. Se obtiene despejando de las dos primeras fórmulas . Si Rt>1 => Sistema multiplicador Si Rt<1 => Sistema reductor c. Ruedas de fricción c.1) Introducción Se realiza la transmisión mediante dos discos, fijos a sus ejes respectivos, que se encuentran en contacto entre si, transmitiendose el movimiento por rozamiento. Existen tres formas de transmitir el movimiento mediante fricción: - Ruedas de fricción exteriores. - Ruedas de fricción interiores. Coplanarias Ruedas de fricción cónicas No coplanarias c.2) Ventajas e inconvenientes de las ruedas de fricción: Ventajas: -Fáciles de fabricar -Baratas -No necesitan mantenimiento -No producen ruidos Inconvenientes: -Deslizamientos para grandes esfuerzos c.3) Estudio cinemático Consideraremos la siguiente notación: n : velocidades de giro en r.p.m. φ : diámetros de las ruedas en cm. e ó 1: entrada o conductora s ó 2: salida o conducida Se verifica siempre que no haya deslizamiento que : ne.φe = ns.φs. ns Rt = ne Rt = φe φs ne ns φe φs Esta fórmula sólo es valida cuando tenemos unicamente dos ruedas. Nunca es válida para más de dos ruedas. Se obtiene despejando de las dos primeras fórmulas Si Rt>1 => Sistema multiplicador Si Rt<1 => Sistema reductor d). Transmisión por cadena d.1) Introducción La transmisión por cadena consta de al menos dos ruedas dentadas unidas por una cadena eslabonada. A la mayor de las ruedas dentadas se le suele llamar plato y a la menor piñón. Las cadenas estan normalizadas y sus dimensiones mas importantes son la distancia entre centros de los rodillos y el ancho entre las caras internas de los eslabones. d.2) Ventajas e inconvenientes de la transmisión por cadena Ventajas: - No hay deslizamiento -Larga vida y duración -Pueden trabajar en ambientes corrosivos -Coste intermedio entre las poleas con correas y los engranajes. Inconvenientes: -Necesitan tensado y lubricación periódicos -Alto nivel de ruido d.3) Estudio cinemático Consideraremos la siguiente notación: . n : velocidades de giro en r.p.m. z : número de dientes de las ruedas. e ó 1: entrada o conductora s ó 2: salida o conducida Se verifica siempre que: ne. ze = ns. zs. ns ne ze Rt = zs ne Rt = ns Ze Zs Esta fórmula sólo es valida cuando tenemos unicamente dos ruedas dentadas. Nunca es válida para más de dos ruedas. Se obtiene despejando de las dos primeras fórmulas Si Rt>1 => Sistema multiplicador Si Rt<1 => Sistema reductor e). Transmisión por engranajes e.1) Introducción Los engranajes surgen para dar respuesta a diversos problemas: -Los deslizamientos de las ruedas de fricción y las poleas -La limitación en cuanto a esfuerzos que sufren las poleas y las cadenas Los engranajes se basan en la transmisión de esfuerzos diente-diente. Permiten transmitir rotación entre ejes o árboles paralelos o no. Su funcionamiento es similar al de las ruedas de fricción. De hecho es como si a unas ruedas de fricción se les tallasen los dientes. Existen muchísimos tipos de engranajes, veamos algunos de ellos: Cilíndricos: Permiten unir ejes paralelos Cónicos: Permiten unir ejes no paralelos que se cortan e.2) Ventajas e inconvenientes Ventajas -No hay deslizamientos -Pueden trabajar en ambientes corrosivos -Es el mecanismo de transmisión que permite mayores esfuerzos -Larga vida Inconvenientes -Alto ruido (soslayable con algunos tipos de dientes) -Alto precio e.3) Estudio cinemático Consideraremos la siguiente notación: n : velocidades de giro en r.p.m. z : número de dientes de los engranajes. e ó 1: entrada o conductora s ó 2: salida o conducida Se verifica siempre que: ne. ze = ns. zs. ns ne ze Rt = zs Rt = ne ns Ze Zs Esta fórmula sólo es valida cuando tenemos unicamente dos engrajes. Nunca es válida para más de dos. Se obtiene despejando de las dos primeras fórmulas Si Rt>1 => Sistema multiplicador Si Rt<1 => Sistema reductor 6. EL PIÑÓN CREMALLERA Es un mecanismo para transformar un movimiento rectilineo en circular y viceversa Una cremallera se puede considerar como un engranaje de radio infinito. Los dientes se tallan sobre una barra. 7. LA CRUZ DE MALTA Tambien se le llama rueda de Ginebra. Es un mecanismo que transforma un movimiento circular en un movimiento rotatorio intermitente. Durante una vuelta de la manivela la rueda gira una fracción de vuelta. El segmento circular que va unido a la manivela evita que la rueda gire cuando el rodillo no está acoplado a una ranura y coloca a la rueda para que el encaje del rodillo sea correcto en la siguiente ranura. Se emplea en proyectores de cine para proporcionar el avance intermitente de los fotogramas y para el movimiento de segunderos en relojes. Es irreversible. 8. LA BIELA-MANIVELA. EL CIGÜEÑAL-BIELA Son mecanismos que sirve para transformar un movimiento rectilineo en circular y viceversa. La manivela es una barra que rota por un extremo. La biela es otra barra que va acoplada con una articulación a la manivela y por otra al émbolo o pistón (que desliza confinado por unas guías). El cigüeñal es un arbol acodado que cumple la misma función que la manivela. Su uso fundamental es en motores (motores de automoción, de barco, de hélice de avión, etc) que suelen llevar acoplados normalmente 4, 5 o 6 bielas con sus correspondientes pistones. 9. LA EXCÉNTRICA La excéntrica es un disco o cilindro cuyo eje de giro no coincide con su centro. La distancia entre el centro del disco y el centro del eje recibe el nombre de excentricidad (d). A la varilla que sigue la periferia de la excéntrica se le llama seguidor. Es un mecanismo que transforma un movimiento circular en rectilineo, nunca al revés. Se usa en las máquinas de coser, los limpiaparabrisas de los automóviles, etc. Es irreversible. 10. LA LEVA La leva es un elemento mecánico que sirve para accionar otro llamado seguidor. Es un elemento fácil de diseñar, que ocupa poco y que tiene la ventaja de producir un movimiento sobre el seguidor de muy diversas características. La varilla o seguidor siempre debe estar en contacto con la leva. Esto se puede conseguir por gravedad o mediante un muelle. Existen múltiples tipos de levas y de seguidores. Uno de sus usos principales es en la distribución de motores de combustión interna. Es irreversible 11.EL TRINQUETE Es un elemento que tiene por misión impedir el giro de un eje en un sentido permitiendolo en el otro. Consta de una rueda dentada y una uñeta que entra entre los dientes de la rueda por efecto de un muelle o por su propio peso. 12.EL TORNILLO SINFÍN-CORONA La corona es un engranaje con dientes helicoidales. La transmisión es siempre del tornillo a la corona, es decir, el generador del movimiento es el tornillo, y el receptor siempre es el engranaje. Este mecanismo permite altísimas reducciones de velocidad que transforma un movimiento circular en otro pero con la salvedad de que sus ejes de giro son siempre perpendiculares. Es irreversible Ocupa un volumen muy reducido Se verifica siempre que: Ntornillo . nºentradas tornillo = Ncorona . Zcorona Rt= Ncorona Ntornillo . 1. Indica de que tipo son las siguientes palancas 2. Halla la fuerza que debe hacerse para elevar la carga de 40 kg de masa de la carretilla 0,6m 0,4m 3. ¿Cuánto debe medir el brazo de la balanza para equilibrar una masa de 10 kg con otra de 7,5 kg? 40 cm Masa de 10 kg Masa de 7,5 kg 4. En el dibujo de la figura se muestran varios sistemas de poleas accionadas por un motor. Rellena los datos vacíos de la tabla adjunta 1 2 7 Polea n φ Rt 3 8 1 6 8 2 12 3 16 9 4 200 5 4 5 40 4 0.25 5 10 6 7 0.1 8 2 30 6 11 9 10 10 12 11 20 0.75 12 6 120 0.6 5. En el siguiente sistema de poleas, la A (motriz) gira en el sentido indicado la figura a 1000 r.p.m.. Los diámetros de cada una de las poleas son los siguientes: φa=20, φb=60, φc=20, φd=60 Determina: a)-Sentido de giro y velocidad de giro de cada una de las poleas. b)-Relación de transmisión parcial (entre A-B,C-D) y relación de transmisión total (entre A-D). A B C D 6. En las poleas que se muestran a continuación, la A (motriz) gira en el sentido indicado la figura a 1000 R.P.M. El diámetro de la conducida es el doble que el de la conductora. Determinar: a)-El sentido de giro de la conducida. b)-Velocidad de giro de la conducida. c)-Relación de transmisión. A B 7. En el siguiente dibujo se muestra el sistema de accionamiento de la broca de una taladradora de sobremesa, que consiste en un sistema de poleas accionadas por un motor eléctrico. Mediante una correa podemos combinar las poleas de la siguiente manera: A-1, B-2, C-3, D-4, E-5 Los diámetros de las poleas en centímetros son: A=9, B=8, C=6.8, =D=5.5, E=4.5 1=5.5., 2=6.5, 3=7.5, 4=8.8, 5=10. Si el motor gira a 1500 r.p.m.. Determinar las velocidades de giro de las poleas que accionan la broca. 8.Dado el siguiente sistema de transmisión y transformación de movimiento por poleas, rellena el cuadro adjunto. N1= 100 Φ1=10 Φ2=20 1 2 3 4 5 6 Φ3=30 Φ4=25 Φ5=15 Φ6=28 Rt1-6= Dibuja también los sentidos de giro 9.Dado el siguiente sistema de transmisión y transformación de movimiento por poleas, rellena el cuadro adjunto. N1=2500 Φ2=20 1 3 2 4 5 6 Φ3=30 N4 =4000 Φ4=25 Φ6=60 N6=1000 Rt1-6= Dibuja también los sentidos de giro 10. A continuación se muestra el accionamiento de una bicicleta formado por dos coronas(A y B) movidas por los pedales y que transmiten el movimiento a través de una cadena a 4 piñones (1, 2, 3 y 4). Se sabe que ZA=36, ZB=28, Z1=18, Z2=15, Z3=12, Z4=9. Rellena el siguiente cuadro (página siguiente) indicando para cada una de las combinaciones posibles piñón-corona: a) Si el ciclista pedalea a 30 rpm, halla la velocidad de giro de la rueda. b) Rt en cada caso Combinaciones corona-piñón A-1 A-2 A-3 A-4 B-1 B-2 B-3 B-4 R.P.M. de la rueda Rt 11. Dado el siguiente sistema de transmisión y transformación de movimiento por ruedas de fricción, rellena el cuadro adjunto: N1=10000 Φ1=25 Φ2=50 1 2 3 4 Φ3=100 Φ4= 200 Rt1-4= Dibuja también los sentidos de giro 12. Dado el siguiente sistema de transmisión y transformación de movimiento por ruedas de fricción. Rellena el cuadro adjunto: N1=10000 Φ2=100 1 2 3 4 Φ3=50 Φ4= 200 Rt1-4=0.25 Dibuja también los sentidos de giro 13. Dado el siguiente sistema de transmisión por engranajes rellena el cuadro adjunto y pinta los sentidos de giro. a b c Na=600 Za=20 Zb=40 Zc=20 Rta-b= Rtb-c= Rta-c= 14. Dado el siguiente sistema de transmisión y transformación de movimiento. Halla el número de dientes del engranaje A. ¿Es posible? A B nA= 30 nB=10 ZB=400 15. El piñón del grupo cónico del siguiente dibujo tiene 12 dientes y la corona 48. Determina: a) Velocidad de giro de la corona cuando el piñón gira a 2800 r.p.m. b) Rt 16. Dado el siguiente sistema de engranajes, rellenese el cuadro adjunto. Número de Velocidad Sentido de dientes en r.p.m. giro Z1=10 N1=1000 Derechas Z2=20 N2 1 2 3 4 5 Z3=40 N3 Z4=20 N4 Z5=30 N5 Z6=60 N6 Z7=50 N7 Z8=25 N8 Nota: No se han dibujado los dientes de los engranajes 6 7 8 17. Dado el siguiente sistema de transmisión y transformación de movimientos por engranajes, rellena el cuadro adjunto Z1=15 N1=10000 Z2= N2= Z3=40 N3=2500 Z4= N4= 1 2 3 4 5 6 Z5= N5=1250 Z6=50 N6=250 Nota: No se han dibujado los dientes de los engranajes 18.Dado el siguiente sistema de transmisión y transformación de movimientos y con los datos que se dan en la tabla.Rellénese la tabla adjunta y píntense los sentidos de giro 1. Rueda de fricción φ1= 20 2. Z2= 140 3. Engranaje Z3= 160 1 2 3 4 5 6 7 4. Z4= 40 5. n5= 30 φ5= 15 6. 7. Rueda de fricción n7= 45 φ7= 80 Nota: No se han dibujado los dientes de los engranaje 19.Se tiene un tornillo sin fin-corona y se busca reducir la velocidad al menos 25 veces. Calcula el número mínimo de entradas que debe tener el tornillo si la rueda dentada tiene 80 dientes. 20.Diseña un sistema de transmisión con dos engranajes de forma que cuando el eje E de cinco vueltas, el eje S de 20 vueltas. Se dispone de cuatro engranajes, de los cuales deberás elegir dos. Z1=20 dientes a) Z2=48 dientes b) Z3=16 dientes c) Z4=12 dientes. ¿El sistema es reductor o multiplicador?. E S 21. Dado el siguiente sistema de transmisión, rellena la tabla adjunta. Halla también la Rt total. 1. Engranaje de Z1=50 n1=1000 1 dentado recto 2. n2=500 3. Engranaje de Z3=50 dentado recto 4. Z4=25 5. Tornillo sin fin 3 entradas 6. Z6= 80 4 5 2 3 6 14. AMPLIACIÓN: ESTUDIO CINEMÁTICO Y DINÁMICO DETALLADO DE LOS ENGRANAJES a) Introducción Los engranajes surgen para dar respuesta a diversos problemas: -Los deslizamientos de las ruedas de fricción y las poleas -La limitación en cuanto a esfuerzos que sufren las poleas y las cadenas Los engranajes se basan en la transmisión de esfuerzos diente-diente. Permiten transmitir rotación entre ejes o árboles paralelos o no. Al número de dientes de un engranaje se le designa con la letra Z. b) Clasificación de los engranajes 1.Según la posición del dentado: 1.a) Interiores 1.b) Exteriores 2.Según el perfil: 2.a) Perfil de evolvente: Se genera enrollando una cuerda alrededor de una circunferencia llamada circunferencia base.Se clasifican en : 2.a.1 Cilíndricos: Los ejes que unen son paralelos entre si. Pueden ser de dentado recto, helicoidal o doble helicoidal 2.a.2 Cónicos :permiten unir ejes no paralelos que se cortan (sus prolongaciones imaginarias). Pueden ser de dentado recto o helicoidal 2.a.3 Hiperbólicos: Permiten unir ejes que ni son paralelos ni se cortan. 2.a.4.Cremalleras: Son engranajes cilíndricos de radio infinito. 2.b) Perfil cicloidal: Surge al seguir la trayectoria de un punto determinado al girar un círculo sobre otro 2.b.1Hipocicloidal o interior 2.b.2Epicicloidal o exterior 2c) Perfil de punto (molinos y relojes) c)Partes de un engranaje Corona: Parte exterior donde se tallan los dientes Nervios: Para aligerar peso Anillo de arrastre: Donde se insertan el eje y la chaveta d) Dimensiones de un engranaje con perfil de evolvente: Se llama CIRCUNFERENCIA PRIMITIVA a la de la rueda de fricción equivalente. Podemos decir que un engranaje es una rueda de fricción de radio su circunferencia primitiva, a la que se le han hecho unos resaltes y unas entallas. m= Dp Z Se define el módulo como: .m=módulo ( en mm) .Dp=diámetro primitivo .Z=número de dientes Para que dos engranajes engranen la única condiciónes que tengan el mismo módulo. Por eso se usan engranajes con perfil de evolvente. Existe otro parámetro que es el ángulo de presión que tambien debe ser el mismo en ambos e)Estudio cinemático de los engranajes Si tenemos dos engranajes con velocidades angulares n1 y n2 y con un número de dientes z1 y z2 se verifica que: N1. Z1 = N2 . Z2 Rt= N2 N1 f) Estudio dinámico de los engranajes Se define el momento de una fuerza respecto de un punto como el producto de la fuerza por la distancia mínima de la fuerza al punto F M=F.d d Supongamos que tenemos dos engranajes, el momento de las fuerzas que se dan en los dientes es lo que provoca el giro de los engranajes Aplicando la fórmula del momento observamos que: M1 = F1. (Dp1/2) M2 = F2. (Dp2/2) Además siempre que no haya aceleración se da que: F1=F2 Se demuestra que: M1.N1=M2.N2 De aquí se deduce facilmente que Rt = M1 M2 Es evidente observar que a mayor diámetro mayor momento de la fuerza (también llamado par). Por tanto el mayor de los engranajes tendrá siempre menor velocidad y mayor par que el otro. g) El piñón-cremallera Es un mecanismo para transformar un movimiento rectilineo en circular y viceversa Una cremallera se puede considerar como un engranaje de radio infinito. Los dientes se tallan sobre una barra. Se denomina Paso Circular de la cremallera a la distancia entre dientes. Se verifica que: Pc = m . π(en mm) Pc Lo anterior se demuestra facilmente si tenmos en cuenta que en un engranaje cualquiera la longitud de su circunferencia es L=π. Dp. Si dividimos entre el nº de dientes obtendremos el paso circular (recordando que m = Dp/z). De manera que Pc=π. Dp/z => Pc = π.m . Si estudiamos ahora la velocidad de la transmisión veremos que en una vuelta completa del piñón se avanzan tantos Pc en la cremallera como dientes tiene el piñón de manera que: Avance de la cremallera por vuelta del engranaje = Z. Pc ( en mm). 22. Se tiene una transmisión de dos engranajes. Se sabe que se quiere conseguir una reducción de velocidad de 15 veces. Sabiendo que el primer engranaje tiene un diámetro primitivo de 20 mm y que tiene 14 dientes, halla el diámetro primitivo del segundo, y los grados cada los que hay que poner un diente. 23. Se tiene una transmisión de dos engranajes. Se sabe que se quiere conseguir una multiplicación de velocidad de 15 veces. Sabiendo que el primer engranaje tiene un diámetro primitivo de 420 mm y que tiene 300 dientes, halla el diámetro primitivo del segundo, y los grados cada los que hay que poner un diente. 24. En un sistema de transmisión de movimientos por engranajes, se sabe que el módulo es 2mm. Se sabe que es reductor con una Rt de 0,15. El engranaje de salida tiene 180 dientes y se sabe que el momento ejercido sobre su eje es de 100 N.m. Hallar: a) Z del engranaje de entrada b) Diámetros primitivos de ambos engranajes. c) Momento ejercido por el eje del engranaje de entrada. Hállalo de dos maneras distintas. d) Fuerzas en los dientes que están en contacto. 25. Se tienen dos engranajes formando un sistema de transmisión de movimientos. Se sabe que la fuerza ejercida por el de entrada en el diente de contacto es de 80 N y que su diámetro primitivo es de 40 mm. Si el segundo engranaje gira 5 veces más rápido que el primero, hállese. a) Momento ejercido sobre el eje del segundo engranaje. b) Diámetro primitivo del segundo engranaje. c) Módulo, si se sabe que uno de los dos engranajes tiene 13 dientes. d) Fuerza ejercida sobre el diente de contacto del segundo engranaje. 26.Se tiene un sistema de transmisión de dos engranajes. Si se sabe que el de salida gira diez veces más despacio que el primero, que el momento en el de salida es de 200N.m y que el diámetro primitivo del de entrada es de 2000mm, halla: a) Fuerza en los dientes del engranaje de entrada. b) Diámetro primitivo del engranaje de salida c) Si el mayor de los dos engranajes tiene doscientos dientes, halla el módulo. 27. Se tiene un sistema de transmisión con dos engranajes. Se sabe que el de salida gira 15 veces más rápido que el de entrada. Además M2= 1000 N.m, m=2 mm y Dp1 =2000 mm. Halla: a) Rt b) M1 c) Z1 d) Z2 e) Dp2 28. Se tiene un sistema piñón - cremallera. En él se sabe que el piñón tiene 26 dientes, y que su radio primitivo es de 50mm. Si la cremallera avanza a 500 mm/s, halla la velocidad de giro del piñón. 29. Se tiene un sistema de transmisión de movimiento cremallera-piñón. Se sabe que los dientes de la cremallera ejercen una fuerza de 1200 N y que el paso circular es de 31,4 mm. El piñón tiene 42 dientes y gira arrastrado por la cremallera a 2000 r.p.m. Halla el momento ejercido sobre el eje del piñón, y la velocidad de la cremallera.