Control Basado en Eventos de la Temperatura de un Invernadero
Anuncio

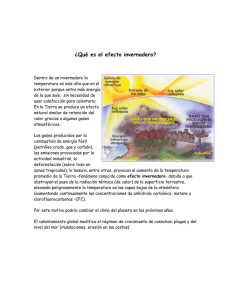
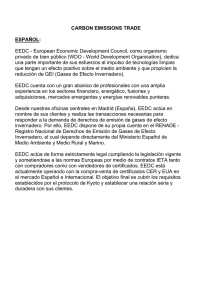
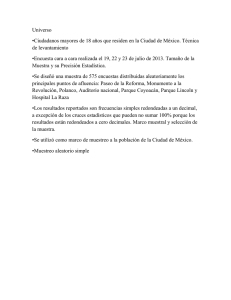
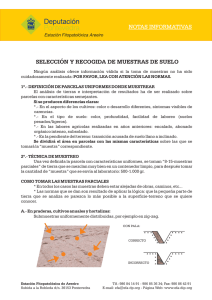
Control Basado en Eventos de la Temperatura de un Invernadero A. Pawlowski, J.L. Guzmán, F. Rodrı́guez, M. Berenguel Dep. Lenguajes y Computación, Universidad de Almerı́a e-mail: ap245@ual.es J. Sánchez, S. Dormido Dep. Informática y Automática, UNED Madrid Resumen El control del clima del invernadero puede ser representado como un sistema basado en eventos, donde el control de las principales variables que poseen dinámicas lentas puede ser gobernado mediante eventos generados a partir de perturbaciones externas. Por lo tanto, este trabajo presenta ideas preliminares y algunos resultados obtenidos en simulación sobre el control basado en eventos aplicado al problema del control del clima de un invernadero. Palabras clave: control basado en eventos, muestreo por cruces de nivel, invernaderos 1. Introducción Debido a las fuertes demandas de la producción y la diversidad, calidad y exigencias de la presentación del mercado, el sector agro-alimenticio está continuamente sujeto a una continua incorporación de nuevas tecnologı́as, donde se requiere una renovación permanente tecnológica del sector y donde la ingenierı́a de control juega un papel decisivo. En este sentido, el control automático y técnicas de robótica están presentes en todos los niveles de la producción agrı́cola: plantación, producción, cosecha, procesos de poscosecha y transporte. La agricultura moderna está sujetada a regulaciones en términos de la calidad e impacto ambiental y es un campo donde la aplicación de técnicas del control automáticas ha aumentado considerablemente durante los últimos años [21], [7], [19], [11], [20]. Los sistemas basados en eventos se hacen cada vez más habituales, en particular para sistemas distribuidos de adquisición de datos en tiempo real y control. Los sistemas de control basados en eventos están presentes actualmente como soluciones para muchos problemas de control [1], [3], [12], [18]. En los sistemas del control basados en eventos, es la propia evolución de la dinámica de la variable de sistema, que decide cuando se ejecuta la siguiente acción de control, mientras que en un sistema de control basado en el tiempo, la progre- sión del tiempo provoca la ejecución de acciones de control. La razón fundamental para la predominancia de los sistemas de control basados en el tiempo ha estado basada en la existencia de la teorı́a bien establecida para los sistemas del control con un tiempo de muestreo constante [2]. Sin embargo, los sistemas de control distribuidos también imponen restricciones de arquitectura al sistema que dificultan la adopción del paradigma de eventos activados por el tiempo. Una alternativa a estos enfoques consiste en utilizar controladores basados en eventos que no estén restringidos a la ocurrencia sı́ncrona de las acciones del controlador. Los principales problemas del control en un invernadero se centran en el control del clima y los problemas de fertilización. El problema de control del clima consiste en mantener la temperatura del invernadero en los niveles especı́ficos a pesar de las perturbaciones. Por otro lado, el problema del control de fertilización es por lo general solucionado proporcionando la cantidad del agua y fertilizantes requeridos por el cultivo. Por lo tanto, los sistemas de fertilización y de clima pueden ser representados como problemas del control basado en eventos, donde las acciones de control serán calculadas y realizadas cuando sean requeridas por el sistema, por ejemplo, cuando el cultivo requiere agua o cuando la ventilación debe estar cerrada debido a los cambios de las condiciones meteorológicas exteriores. Además, como se mencionó anteriormente, con sistemas del control basados en eventos sólo una nueva señal del control es generada cuando se observa un cambio en el sistema. Es decir, las conmutaciones de la señal del control son reducidas y actúan solamente cuando un evento ocurre. Este hecho es muy importante para la vida de actuadores especialmente desde un punto de vista económico (reduciendo el uso de electricidad o combustible), sobre todo en los invernaderos donde la actuación se realiza por dispositivos mecánicos controlados por reles. Este artı́culo presenta algunas ideas preliminares y simulaciones sobre el uso de un sistema de control basado en eventos para el control de temperatura de un invernadero. El control basado en eventos ha sido aplicado para el problema del control de temperaturas tanto diurna usando el sistema de ventilación como nocturna usando el sistema de calefacción. El artı́culo se organiza de la siguiente manera. En la sección 2 se describe el problema del control del clima de un invernadero. Después, se discute el sistema basado en eventos para el control de temperatura del invernadero. En la sección 4 se presentan los resultados de las simulaciones. Finalmente en la sección 5 se describen algunas conclusiones. 2. 2.1. Problema del Control Climático en un Invernadero Descripción del problema del control climático El crecimiento del cultivo depende principalmente de las variables climáticas ambientales y de la cantidad de agua y fertilizantes suministrados por la irrigación. Este es la razón principal por la qué un invernadero es ideal para cultivar, ya que constituye un ambiente cerrado del cual las variables climáticas y fertilización pueden estar controladas para permitir un crecimiento y desarrollo óptimo de la cosecha. El clima y el fertirrigation son dos sistemas independientes con los problemas del control diferentes. Empı́ricamente, las exigencias de agua y los nutrientes de especies de diferentes cultivos son conocidos y, de hecho, los primeros sistemas automatizados eran aquellos que controlan estas variables. Si como el problema de la producción del cultivo del invernadero es una cuestión compleja, una simplificación aplicada consiste en suponer que las plantas reciban la cantidad de agua y fertilizantes que requieren en cada momento. De esta manera, el problema se reduce al control del crecimiento del cultivo en función de condiciones climáticas [17], [16]. Los principales modos para controlar el clima del invernadero son, la ventilación y calefacción para modificar la temperatura interior y las condiciones de humedad, sombreamiento y luz artificial para cambiar la radiación interna, la inyección de CO2 para influir en la fotosı́ntesis, y rociamiento para el enriquecimiento de humedad. Un estudio más profundo sobre los rasgos del problema del control climático se puede encontrar en [17]. Basándose en las estructuras del invernadero, los actuadores más comunes, los tipos del cultivo y las condiciones comerciales del Sudeste de España (donde se adquirió los datos reales usados para las simulaciones realizadas en este trabajo), la variable principal del clima a controlar es la temperatura. Debido al elevado coste de inyección artificial de CO2 , en mayorı́a de los casos sólo se supervisa la concentración de CO2 . La radiación PAR se controla por pantallas de sombreamieto pero su Figura 1: Variables climáticas del control. uso no es muy amplio. Teniendo en cuenta todo lo anterior, este trabajo se centra en el control de temperatura haciendo uso de los sistemas de ventilación y calefacción. 2.2. Control de la temperatura de aire Las plantas crecen bajo la influencia de la radiación PAR (condiciones diurnas), realizando el proceso de la fotosı́ntesis. Además, la temperatura influye a la velocidad de la producción de azúcar por la fotosı́ntesis, y ası́ la radiación y la temperatura tienen que estar en correlación en la manera que el alto nivel de temperatura corresponde al alto nivel de radiación. De este modo, en condiciones diurnas es necesario mantener la temperatura en un nivel alto, siendo óptimo para el proceso de la fotosı́ntesis. En las condiciones nocturnas, las plantas no están activas (el cultivo no crece), entonces no es necesario mantener la temperatura tan alta. Por esta razón, normalmente se considera dos puntos de consignas de temperatura: diurna y nocturna [10]. Debido a las condiciones del clima favorables del Sudeste de España, durante los intervalos diurnos, la energı́a requerida para alcanzar la temperatura óptima es proporcionada por el sol. De hecho, el problema del control de temperaturas diurnas es la refrigeración del invernadero (con temperaturas más altas que la consigna diurna) utilizando la ventilación natural para alcanzar la temperatura diurna óptima. Por otro lado, el problema del control de las temperaturas nocturnas es la calefacción del invernadero (con temperaturas más bajas que la consigna nocturna) utilizando sistemas de calefacción para alcanzar la temperatura óptima nocturna. Como se mencionó anteriormente, en este trabajo se analiza el control de temperaturas diurnas y nocturnas para estudiar el control basado en eventos propuesto. 2.3. Control de la temperatura con sistemas de ventilación y calefacción La ventilación natural determina el intercambio de aire y flujo de aire en un invernadero como una consecuencia de las diferencias entre temperaturas exteriores e interiores. El objetivo principal de este sistema del control es mantener la temperatura interior alrededor de una consigna. La relación entre la apertura de ventanas y de la temperatura interior no es lineal [15], donde generalmente se hace uso de una estrategia de control gain-scheduling (ver la Figura 2). La mayorı́a de las soluciones comerciales incluyen esta clase de controladores (tipo gain-scheduling) con objetivo de enfrentarse a las perturbaciones de dinámicas lentas y rápidas. Este controlador consiste en un esquema de PI donde los valores de controlador son ajustados basándose en algunas perturbaciones: la temperatura exterior y la velocidad de viento. Para controlar la temperatura noctura, aunque existen numerosas estrategias de control disponibles [14], se ha realizado un estudio basado en controladores todo/nada ya que son los controladores más comúnmente utilizados en los invernaderos convencionales. Una descripción profunda de estos algoritmos puede ser encontrada en [17]. Mecanismo Adaptativo Controlador de Temperatura y(t) d t Temperatura Ventilación Natural Invernadero Figura 2: Controlador gain-scheduling. El control basado en eventos en invernadero Antes de discutir el control de temperatura de invernadero como un problema del control basado en eventos, se introducen algunas informaciones básicas sobre muestreo por cruces de nivel y el control basado en eventos. 3.1. (1) Temperatura exterior - 3. |x(tk ) − x(ts )| > δ Velocidad de viento exterior Consigna de Temperatura + lación delta ası́ncrona, método de banda muerta, método send-on-delta, muestreo por cruce de nivel y muestreo de Lebesgue. A pesar de sus nombres diferentes (en este trabajo el muestreo de cruce de nivel), el principio básico es el mismo: la señal se muestrea cuando el valor absoluto de la diferencia entre el valor actual x(ts ) y el ultimo valor muestreado x(tk ) es mayor que un lı́mite especificado δ. Cuando el cambio en la señal es relativamente pequeño, el número de muestras es significativamente menor que en el caso del método del muestreo periódico, tal y como se muestra en la Figura 3 [5]: Muestreo por cruce de nivel y control basado en eventos En un sistema del control basado en eventos las acciones del control se llevan a cabo de manera asincrónica, es decir, el perı́odo de muestro es gestionado por eventos y es llamado muestreo basado en eventos. La idea del muestreo basado en eventos es una idea muy antigua [6] e indica que el método más apropiado para muestrear consiste en transmitir la información sólo cuando existe un cambio significativo en la señal, que justifica la adquisición de una nueva muestra. Este tipo de estrategias de muestreo ha recibido diferentes nombres en la literatura [5]: criterio de diferencia de amplitudes constante, muestreo basado en magnitud, modu- Figura 3: Muestreo por cruce de nivel. Si el muestreo es liberado por el evento, los sistemas del control basados en eventos pueden ser considerados como la alternativa para sistemas del control basados en el tiempo. Otros nombres para estos sistemas del control son aperiódicos o sistemas del control asincrónicos. En un sistema basado en eventos, la aparición de un evento, más bien que el paso del tiempo, decide cuando una muestra esta tomada. La naturaleza del evento podrı́a variar. Se podrı́a mencionar siguientes ejemplos: una señal medida cruza un cierto lı́mite, o la llegada de un paquete de datos a un nodo en una red de ordenadores [1]. De un modo general, un controlador basado en eventos consiste en dos partes: un detector de eventos y un controlador. El detector de eventos indica al controlador que debe producir una acción del control porque un evento ha ocurrido. Por ejemplo, la decisión para calcular una nueva señal del control podrı́a consistir en, cuando el valor absoluto de la diferencia entre el valor actual del error, e(tk ), y el último valor del error calculado, e(ts ), es mayor que un lı́mite δ, o cuando el tiempo transcurrido desde que se calculó la última supere un lı́mite hmax . La última condición es una simple medida de seguridad: |e(tk ) − e(ts )| > δ and tk − ts ≥ hmax (2) El efecto de esta condición será que el regulador se ejecutará en el tiempo nominal del muestreo hnom durante transitorios, por ejemplo, cambios de consigna y perturbaciones de carga, y que el regulador se ejecutará en el intervalo de muestreo máximo durante los periodos estacionarios [1]. 3.2. Muestreo por cruce de nivel y control basado en eventos en un invernadero 4. 4.1. La Tabla 1 presenta los lı́mites individuales de las variables más comunes usadas para el control de temperatura en inveranderos. Estos lı́mites de δ = 3 % y δ = 5 % se han calculado basados en la experiencia de los autores y tras analizar más de tres años de datos. El cálculo del lı́mite δ para cada variable individual fue realizado estudiando sus valores mı́nimos y máximos, done el cambio de cada variable para δ = 3 % y δ = 5 % fue determinado calculando el 3 % y el 5 % de la diferencia entre los valores máximos y mı́nimos. En lugar de elegir sólo un lı́mite para cada variable, se seleccionaron dos lı́mites diferentes para analizar su efecto, como se presenta en la siguiente sección. Por otra parte, el controlador clásico para el control de temperaturas fue sustituido por un regulador basado en eventos. Por lo tanto, el sistema del control esta formado ahora por un generador de eventos y un controlador. De esta manera, el controlador calculará una nueva acción de control cuando un evento es detectado por el generador de eventos. En la siguiente sección se analizan los mecanismos de generacion de eventos comentados anteriormente. Variable Temperatura interior Temperatura exterior Humedad Radiacion solar Velocidad de viento Dirección de viento δ = 5% 0,60 0,61 0,49 34,30 0,53 17,84 δ = 3% 0,36 0,36 0,29 20,58 0,31 10,70 Cuadro Tabla 1: Los limites de variables de invernadero Materiales y métodos Las simulaciones presentadas en esta sección han sido realizadas usando el modelo climático de invernadero desarrollado por [17] y el TrueTime Toolbox para MATLAB/Simulink [9]. TrueTime es una herramienta desarrollada para Simulink orientada para simulaciones de sistemas de tiempo real, sistemas de control basados en red, modelos de comunicación, etc. 4.2. Antes de proceder al control basado en eventos, se procede al estudio de los lı́mites δ convenientes para cada variable de invernadero.Como se muestra en la siguiente sección, este lı́mite tiene una influencia directa en la generación de eventos y en la cantidad de datos transmitidos. Resultados de Simulación Transmisión de datos En los sistemas del control modernos, es habitual usar la red de comunicación para transmitir datos entre los diferentes bloques de sistema del control. Normalmente se transmite gran cantidad de datos en cada instante de muestreo, sobre todo debido a requerimientos del sistema de control. A veces, esta solución puede producir una gran carga de red (en un sistema del control del invernadero, todos los datos están transmitidos cada minuto o incluso más rápido) e introduce los retardos en el tiempo de la entrega de los paquetes de datos. Cuando la carga de la red aumenta, la probabilidad de pérdidas de datos también aumenta, y este factor puede ser muy negativo para el rendimiento del control. Una solución de este problema es el uso del muestreo basada en eventos, es decir, el muestreo por cruces de nivel descrito en secciones anteriores. Esta técnica permite transmitir sólo los datos necesarios. Es este apartado se muestra un estudio del uso de muestreo por cruces de nivel para ser usado en el control climático de un inverandero. Las simulaciones fueron realizadas para un periodo de 8 dı́as completos donde los lı́mites δ usados para el muestreo por cruces de nivel están descritos en la Tabla 1. La Tabla 2 presenta los resultados de transmisión de datos obtenidos después de la simulación, para las variables del invernadero. En la tabla se muestra la comparación del número de muestras obtenidas y transmitidas utilizando el muestreo por cruce de nivel con el muestreo basada en el tiempo donde los datos están transmitidos cada minuto, como es tı́pico en sistemas del control del invernadero. Como se puede observar, se obtiene un ahorro de transmisión muy importante para ambos lı́mites, δ = 3 % y δ = 5 %, valores más del 90 % para la mayorı́a de las variables. Además, se observó que la cantidad de datos transmitidos es más pequeña cuando el lı́mite es más grande. Por otro lado, la dinámica de cada variable afecta considerablemente al número de muestras tomadas. Este fenómeno puede ser observado para los Variable Temperatura interior Temperatura exterior Humedad Radiacion solar Velocidad de viento Dirección de viento Clásico 11808 11808 11808 11808 11808 11808 δ = 3% 469 762 674 826 5720 5003 Ahorro ( %) 96,02 93,54 94,29 93,00 51,55 57,63 δ = 5% 279 353 358 553 3715 3255 Ahorro ( %) 97,63 97,01 96,96 95,31 68,53 72,43 Apertura [%] Temperatura interior Cuadro Tabla 2: Resultados de transmisión de datos, comparación del número de muestras Consigna Apertura [%] Cont. basado en eventos d = 5% Cont. basado en eventos d = 3% 26 25.5 25 24.5 24 0 2000 4000 6000 8000 10000 12000 2000 4000 6000 8000 10000 12000 2000 4000 6000 8000 10000 12000 2000 4000 8000 10000 12000 100 50 0 0 100 50 0 0 Apertura [%] Clasic cont. 26.5 100 50 0 0 6000 Tiempo (min) Figura 4: Control basado en tiempo en comparación con control basado en eventos - consigna diurna. variables que cambian su valor con alta frecuencia como la velocidad y dirección del viento. Como se puede observar, la cantidad de los datos transmitidos es más pequeña para δ = 5 % pero ocasiona una mayor destrucción de la señal original. Como la conclusión global de esta simulación, se deduce que eligiendo un umbral de δ = 3 %, es posible obtener una gran reducción de muestras adquiridas sin importantes pérdidas de información en las señales desde un punto de vista del diseño de control. 4.3. Control de temperatura basado en eventos Esta sección se presentan los resultados de la simulación obtenidos para el control de la temperatura diurna usando ventilación y calefacción. Las Figura 4 y 5 muestran los resultados de control para el control diurno y nocturno de tempratura haciendo uso del sistema de ventilación y calefacción res- pectivamente. Como se puede observar el controlador calcula sólo una nueva señal de control cuando ocurre un nuevo evento. La aparición de los eventos es gestionado por un generador de eventos que detecta los posibles eventos que afectan al controlador. Para este estudio de simulación, estos eventos están representados por cambios de: consigna, la temperatura interior, la temperatura exterior y la velocidad de viento. La frecuencia de eventos para las variables climáticas depende del valor lı́mite δ usado para el muestreo por cruce de nivel como se muestra en la Tabla 2. Por lo tanto, ambos lı́mites, δ = 3 % y δ = 5 %, se han usado de nuevo para analizar sus influencia en el problema de control basado en eventos. Los resultados de control para el control basado en eventos están presentados como señales muestreadas para mostrar mejor la influencia de los eventos. La simulación ha sido realizada para un periodo de 8 dı́as completos donde la temperatura de consigna fue elegida a 26o C para el periodo diurno y de 17o C Temperatura interior Controlador cálsico Controlador basado en eventos G=3% Controladorbasasdo en eventos G=5% Consigna 18 17.5 17 16.5 0 2000 4000 6000 8000 10000 12000 2000 4000 6000 8000 10000 12000 2000 4000 6000 8000 10000 12000 2000 4000 6000 Tiempo (min) 8000 10000 12000 1 Estado de calefacción 0.5 0 0 1 0.5 0 0 1 0.5 0 0 Consigna Cont clásico Cont basade en eventos d = 3% Cont basade en eventos d = 5% 27 26 25 24 6400 6450 6500 6550 6600 6650 6700 6750 6800 6450 6500 6550 6600 6650 6700 6750 6800 6450 6500 6550 6600 6650 6700 6750 6800 6450 6500 6550 6650 6700 6750 6800 100 50 Apertura [%] 0 6400 100 Apertura [%] Apertura [%] Temperatura interior 100 50 0 6400 50 0 6400 6600 Tiempo (min) Figura 6: Resultado de control para el quinto dı́a. Controlador basado en eventos G=3% Controlador cálsico Controladorbasasdo en eventos G=5% Consigna 18 17.5 17 16.5 0.99 1 1.01 1.02 1.03 1.04 1.05 1.06 1.07 4 1 x 10 0.5 Estado de calefacción para el nocturno. Las Figuras 6 y 7 muestran una comparación de los resultados de control obtenidos usando el control clásico basado en el tiempo y el control basado en eventos, donde esta representada la banda del interés. Se puede ver que el regulador basado en el tiempo obtiene mejores resultados de control, pero ocasiona un número más grande de conmutaciones en la señal del control. La Figura 6 muestra los resultados del control para el quinto dı́a durante el periodo diruno, donde se observa que el número de cambios de la señal de control es mucho más pequeño para los casos de control basado en eventos. El mismo fenómeno se observa para el octavo dı́a durante el periodo nocturno tal y como se observa en la Figura 7. Temperatura interior Figura 5: Control basado en tiempo en comparación con control basado en eventos - consigna nocturna. 0 0.99 1 1.01 1.02 1.03 1.04 1.05 1.06 1.07 1.01 1.02 1.03 1.04 1.05 1.06 1.07 1 0.5 0 0.99 1 4 x 10 1 0.5 0 0.99 1 1.01 1.02 1.03 Tiempo (min) 1.04 1.05 1.06 1.07 4 x 10 Figura 7: Resultado de control para la octava noche. Este hecho es importante para el tiempo de vida de los actuadores, sobre todo en invernaderos donde el sistema de ventilación y calefacción están formados por actuadores mecánicos. Después de estudiar los ocho dı́as de simulación, se ha obtenido que el control basado en el tiempo para el periodo diurno produjo 539 conmutaciones en la señal de control mientras 113 y 86 conmutaciones se obtuvieron para el control basado en eventos con δ = 3 % y δ = 5 %, respectivamente. Para el periodo nocturno se ha obtenido 3429 conmutaciones para el controlador clásico, y 1410 para δ = 3 % y 804 para δ = 5 %. Este factor es importante para la vida de actuadores pero también Calefacción 200 IAE 150 100 50 0 1 2 3 4 5 6 Numero de la noche 7 8 9 Ventilación 50 Controlador clásico Controlador basado en eventos G=3% Controlador basado en eventos G=5% IAE 40 30 20 10 0 1 2 3 4 5 Numero del día 6 7 8 Figura 8: Rendimiento de control mediante IAE. desde un punto de vista económico ya que el uso de electricidad y combustible se reduce considerablemente. En las Figuras 4 y 5 también se puede observar que el rendimiento de la variable controlada es peor para el control basado en eventos. Teniendo en cuenta dicho aspecto se ha usado la integral absoluta del error (IAE) como la medida de comparar el rendimiento de control. La Figura 8 presenta dicha comparación. Como ha sido de esperar, el controlador basado en el tiempo presenta mejores resultados de control, donde además se observa que los valores de IAE obteniendo por controlador basado en eventos con δ = 3 % son menores que en el caso con δ = 5 %. Este resultado también puede ser observado en la Figura 8. Un resultado interesante es que el regulador basado en eventos con δ = 3 % proporciona mejores resultados de control que el control basado en el tiempo durante algunos dı́as especı́ficos. Esto es debido a que el regulador basado en el tiempo actúa también para pequeños valores de error mientras el regulador basado en eventos sólo trabaja cuando el error es superior que el lı́mite δ, quedándose sin actuar cuando el valor de error es constante durante un perı́odo de tiempo más largo. 5. Conclusiones Este trabajo presenta una técnica de control basada en eventos para el problema de control de clima de un invernadero. El regulador basado en eventos ha permitido disminuir considerablemente el número de conmutaciones en la acción de control, haciendo posible de estudiar el compromiso entre la cantidad de datos a transmitir y la calidad de control. El lı́mite del muestreo por cruce de nivel ha presentado una gran influencia en el rendimiento de control basada en eventos, donde para el problema del control del clima del invernadero, un valor del 3 % ha proporcionado resultados prometedores. Por otra parte, el control basado en eventos reduce el número de conmutaciones hasta el 80 % en comparación con el controlador tradicional basado en el tiempo. Este resultado es muy importante para invernaderos ya que esto permite reducir los gastos y prolongar la vida de actuadores, sobre todo para el sistema de calefacción donde el consumo de combustible es un factor muy crı́tico. Como trabajo futuro se plantea probar mencionados anteriormente ideas para el resto de algoritmos del control del invernadero, como por ejemplo: control de humedad con ventilación o control de fertilización, donde serı́a también posible obtener resultados satisfactorios desde un punto de vista económico. Finalmente, una vez que los algoritmos sean probados en simulación, todas estas ideas serán puestas en práctica en un invernadero real con el objetivo de verificar los resultados obtenidos. Agradecimientos Este trabajo ha sido financiado por la CICYT, bajo los proyectos DPI2007-66718-C04-04 y DPI2007-61068, y por IV PRICIT (Plan Regional de Ciencia y Tecnologı́a de la Comunidad de Madrid, 2005-2009), bajo la subvención S0505/DPI/0391. Referencias [1] K. J. Arzen. A simple event-based pid controller. In Proceedings of 14th IFAC World Congress. Beijing, China, 1999. [2] K. J. Astrom. Analysis and Design of Nonlinear Control Systems, chapter Event based control. Springer Verlag, 2007. [3] K. J. Astrom and B. Wittenmark. Computer controlled systems: Theory and design. Prentice Hall, New Jersey, 1997. [4] G. P. A. Bot. Greenhouse climate from physical processes to a dynamic model. PhD thesis, Agricultural University of Wageningen, The Netherlands, 1983. [5] S. Dormido, J. Sánchez, and E. Kofman. Muestreo, Control y Comunivación Basados en Eventos. Revista Iberoamericana de Automática e Informática Industrial, 5(1):5–26, 2008. [6] P. Ellis. Extension of phase plane analysis to quantized systems. IRE Transactions on Automatic Control, 4(2):43– 54, 1959. [7] I. Farkas. Modelling and control in agricultural processes. Computers and Electronics in Agriculture, 49(3):315–316, 2005. [8] L. Gonda and C. E. Cugnasca. A proposal of greenhouse control using wireless sensor networks. In 4thWorld Congress Conference on Computers in Agriculture and Natural Resources. Orlando, Florida, USA, 2006. [18] J. H. Sandee, W. P. M. H. Heemels, and P. P. J. van den Bosch. Event-driven control as an opportunity in themultidisciplinary development of embedded controllers. In Proceedings of the American Control Conference. Portland, Oregon, USA, 2005. [9] D. Henriksson, A. Cervin, and K. E. Arzen. Truetime: Real-time control system simulation with matlab/ simulink. In In Proceedings of the Nordic MATLAB Conference. Copenhagen, Denmark, 2003. [19] N. Sigrimis, P. Antsaklis, and P. Groumpos. Control advances in agriculture and the environment. IEEE Control System Magazine. Special Issue, 2001. [10] P. G. H. Kamp and G. J. Timmerman. Computerized environmental control in greenhouses. A step by step approach. IPC Plant, The Netherlands, 1996. [20] N. Sigrimis and R. King. Advances in greenhouse environment control. Computers and Electronics in Agriculture. Special Issue, 26(3), 1999. [11] R. King and N. Sigrimis. Computational intelligence in crop production. Computers and Electronics in Agriculture. Special Issue on Intelligent Systems in Crop Production, 31(1), 2000. [12] M. Miskowicz. The event-triggered sampling optimization criterion for distributed networked monitoring and control systems. In Proceedings of the IEEE International Conference on Industrial Technology. Maribor, Slovenia, 2003. [13] L. V. Narasimhan, A. Arvind, and K. Bever. Greenhouse asset management using wireless sensor-actor networks. In IEEE International Conference on Mobile Ubiquitous Computing, Systems, Services and Technologies. French Polynesia, Tahiti, 2007. [14] A. Ramı́rez-Arias, F. Rodrı́guez, J.L. Guzmán, M. Berenguel, M. R. Arahal., J.C. López. Improving efficiency of greenhouse heating systems using model predictive control. Proceedings of the 16th IFAC World Congress, 2005. Praga, República Checa. 2001. Oporto, Portugal. [15] F. Rodrı́guez, M. Berenguel, and M. R. Arahal. Feedforward controllers for greenhouse climate control based on physical models. Proceedings of the European Control Conference ECC01, 2001. Oporto, Portugal. [16] F. Rodrı́guez, J. L. Guzmán,M. Berenguel, andM. R. Arahal. Adaptive hierarchical control of greenhouse crop production. International Journal of Adaptive Control Signal Processing, 22:180–197, 2008. [17] F. Rodrı́guez. Modeling and hierarchical control of greenhouse crop production. PhD thesis, University of Almerı́a, Spain, 2002. [21] G. van Straten. What can systems and control theory do for agriculture? In IFAC 2nd International Conference AGRICONTROL 2007. Osijek, Croatia, 2007. [22] Y. W. Zhu, X. X. Zhong, and J. F. Shi. The design of wireless sensor network system based on zigbee technology for greenhouse. Journal of Physics: Internacional Sympodium on Instrumentation Science and Technology, (48):1195–1199, 2006.