Guia: El Plano Inclinado - VirtualCiencias
Anuncio

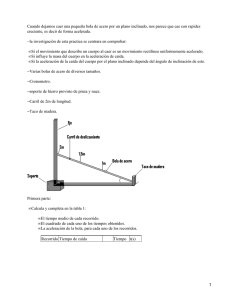
ESCUELA DE FÍSICA UNIVERSIDAD NACIONAL DE COLOMBIA SEDE MEDELLÍN LABORATORIO DE FÍSICA MECÁNICA PRÁCTICA N° 6 TEMA : EL PLANO INCLINADO OBJETIVO GENERAL • Determinar el valor de la aceleración de un cuerpo que desliza sobre un plano inclinado. OBJETIVOS ESPECÍFICOS • Estudiar un movimiento uniformemente variado (MUV). • Aprender a realizar regresiones cuadráticas. • Interpretar gráficos provenientes de datos experimentales. 1. FUNDAMENTO TEÓRICO 1.1 EL PLANO INCLINADO El plano inclinado (ver figura 1) es máquina simple de gran importancia en la física mecánica y se define como una superficie plana de un cuerpo, la cual forma un ángulo con el plano horizontal. Figura 1. El plano inclinado 1 Un plano inclinado suele representarse como una línea recta en un corte vertical, como se indica en la figura 2. Si se trazan tres rectas en un punto cualquiera del plano inclinado: una horizontal, una vertical y una perpendicular (normal) al plano inclinado, se puede mostrar que el ángulo entre la normal y la vertical es igual a . Analizando las igualdades de ángulos (allí hay líneas paralelas, ángulos rectos, ángulos opuestos por el vértice), se puede ver que ver hay cuatro ángulos en el punto del plano iguales a , los cuales serán importantes en el estudio de los movimientos sobre un plano inclinado [1]. Figura 2. Ángulos importantes en un plano inclinado 1.2 ANALISIS DE UN CUERPO QUE DESCENDE POR UN PLANO INCLINADO SIN FRICCIÓN Con frecuencia el movimiento de un cuerpo se realiza de una manera determinada y específica, debido a restricciones, ligaduras o vínculos especiales, que lo obligan a moverse de tal o cual manera. Por ejemplo, un plano inclinado obliga a un cuerpo a moverse en una trayectoria rectilínea y sobre una pista circular un cuerpo se mueve forzosamente en círculo. La elección de ejes adecuados está muy relacionada con esas condiciones específicas de cada movimiento concreto y es importante plasmar matemáticamente con claridad dichas condiciones específicas, que son de tipo cinemático, antes de la aplicación de la segunda ley de Newton [1]. Figura 3. Análisis de un cuerpo deslizando por un plano inclinado. Consideremos un bloque que se encuentra en reposo en un plano inclinado liso, es decir, sin fricción. Elegimos unos ejes en dirección del plano y normal a él con origen en la parte superior del plano 2 inclinado, como se ve en la figura 3. El sistema es el bloque, considerado como una partícula de masa m . Las fuerzas sobre el bloque son: el peso (atracción gravitacional hecha por la tierra), y la fuerza de contacto ejercida por el plano inclinado, la fuerza normal N (no se considera la fuerza de fricción ya que se asume que la superficie es lisa). Al aplicar la segunda ley de Newton en las direcciones x e y se obtiene que: F x m ax (1a) mg sen m a x (1b) a x g sen (1c) F (2a) y m ay N mg cos 0 (2b) N mg cos (2c) En un plano inclinado se cumple que en cualquier punto de éste, el ángulo respecto a la horizontal es constante, por tanto se puede decir que el bloque desciende con aceleración constante a x g sen . Como se analizó en laboratorios anteriores, las ecuaciones cinemáticas que describen el movimiento de un cuerpo que se mueve con aceleración constante están dadas por: x 1 2 a x t V0 x t x0 2 (3a) Vx a x t V0 x (3b) donde x0 es la posición inicial, V0x es la velocidad inicial y a x es la aceleración con la que desciende el cuerpo. Es importante resaltar que los signos de cada término dependerán del sistema coordenado escogido [1]. 2. TRABAJO PRÁCTICO 2.1 DESCRIPCION DE LA EXPERIENCIA La fotocompuerta fue diseñada para detectar los cambios en la intensidad de luz que recibe un sensor, es decir cuando el sensor para de estar iluminado a estar en oscuridad y viceversa. Cuando se presenta uno de estos cambios se genera una señal de voltaje que es enviada a la tarjeta de sonido del computador y con ayuda del software Sonoscopio Virtual se grafican los cambios de voltaje en 3 función del tiempo. Al analizar esta señal pueden medirse intervalos de tiempos causados por eventos que suceden muy rápidamente, es decir la fotocompuerta se convierte en un cronómetro de alta precisión. Cuando una regla-cebra pasa a través de la fotocompuerta se despliega en el Sonoscopio Virtual una señal compuesta por varios picos, cada uno de ellos es el resultado de las repetidas interrupciones que hacen las franjas oscuras/brillantes de la regla-cebra al haz de luz. Esta señal permite medir los instantes para diferentes posiciones del centro de masa del sistema compuesto por la regla-cebra y el cuerpo al que está unida. Experimentalmente se dejará deslizar un cuerpo por un plano inclinado y unido a éste cuerpo se pondrá la regla cebra. De ésta forma se tomaran los datos de posición del bloque y del tiempo que tarda en realizar cada desplazamiento. Los datos obtenidos pueden modelarse (mediante una regresión cuadrática de x vs t ) en una ecuación de la forma: x = c1 t 2 c2 t c3 (4) Comparando término a término las ecuaciones (3a) y (4) que describen la caída de la regla, puede concluirse que el significado de cada uno de los coeficientes de la regresión cuadrática es: 1 ax 2 c2 V0x (5b) c3 x0 (5c) c1 (5a) Analizando el coeficiente c1 puede concluirse que la aceleración del bloque que desliza por el plano está dada por: a x 2 c1 (6a) La incertidumbre de la aceleración de la gravedad vendrá dada por: uax 2 uc1 (6b) 2.2 PROCEDIMIENTO Conectar la fotocompuerta al computador de la siguiente forma: una terminal a un puerto USB (para alimentar eléctricamente el Diodo Emisor de Luz -LED-) y la otra terminal a la entrada del micrófono (para entrar la señal de respuesta al PC). 4 Ejecutar la plataforma de software PhysicsSensor y luego abrir el Sonoscopio Virtual. Atender la explicación del profesor o del monitor sobre el manejo de este sistema hardwaresoftware. La práctica de este laboratorio va a desarrollarse dos veces, cada una con ángulo de inclinación del plano inclinado diferente. Para la primera medición, siguiendo las indicaciones del profesor, ajustar la inclinación del plano inclinado con un ángulo pequeño ( 1 15º ) con respecto a la superficie horizontal de la mesa. Para la aumentar el ángulo de inclinación del plano respecto a la mesa ( 1 20º ). 2.3 CÁLCULO DE LA ACELERACION DE UN CUERPO DESLIZANDO POR UN PLANO INCLINADO ( 1 15º ) Medir el ángulo de inclinación del plano con ayuda de un transportador y reportarlo en la hoja de cálculo con su respectiva incertidumbre. 1 º º Definir como marco de referencia el laboratorio y como sistema de coordenadas el eje x apuntando en la dirección del plano inclinado. Considerar que el instante t 0 corresponde al momento en el cual la regla-cebra comienza a atravesar el haz de luz y la posición de su centro de masa, en ese instante, es el origen de coordenadas ( x0 0 ). Por lo tanto, la posición del centro de masa en cualquier instante se expresa según la ecuación (3a). Activar el sonoscopio y dejar caer el carro con la regla cebra al frente de la fotocompuerta, asegurando que su recorrido no se vea interferido por ningún agente externo y que todas las ranuras de la regla cebra generen una señal en el sonoscopio. La señal obtenida en el sonoscopio debe ser similar a la mostrada en la Figura 4 (el software da la opción de guardar los datos por si es necesario un análisis posterior de los mismos). Medir la distancia desde la primera ranura ( x0 0 ) a cada una de las demás ranuras. Siguiendo las instrucciones del manejo del sonoscopio, completar la Tabla 1, donde la posición se mide tomando como referencia la primera ranura que pasa por la fotocompuerta y el tiempo t es el intervalo medido desde el primer pico (del sonoscopio) a cada uno de los siguientes picos. 5 Figura 4. Ejemplo de una señal obtenida usando una regla cebra. Tabla 1. Descenso de un cuerpo por un plano inclinado ( 1 15º ). x t (m) (s) Posición 1 Posición 2 Posición 3 Posición 4 Posición 5 Posición 6 Posición 7 Posición 8 Posición 9 Posición 10 Posición 11 Posición 12 Posición 13 Posición 14 Posición 15 Usar PhysicsSensor para hacer una regresión cuadrática de x vs t , y obtener el valor de cada uno de los coeficientes de la regresión cuadrática. Los datos obtenidos pueden modelarse por una ecuación (4). Analizando el coeficiente c1 puede concluirse que la aceleración del bloque está dada por: a x 2 c1 (6a) 6 y su incertidumbre está dada por: uax 2 uc1 (6b) El dato obtenido a partir de la regresión cuadrática es la medida experimental. Para compararlo se usará el resultado obtenido a partir de la aplicación de la segunda ley de Newton. A continuación calcular la aceleración de acuerdo a la ecuación (1c) y éste resultado se asumirá como el valor convencionalmente verdadero. a x g sen 1 (1c) Determinar el porcentaje de error con la ecuación (7). Asumir como valor de la aceleración de la 2 gravedad g medellin = 9,78 m s . % Error Valor convencionalmente verdadero Valor ex perimental 100 Valor convencionalmente verdadero (7) 2.4 CÁLCULO DE LA ACELERACION DE UN CUERPO DESLIZANDO POR UN PLANO INCLINADO ( 1 20º ) Medir el ángulo de inclinación del plano con ayuda de un transportador y reportarlo en la hoja de cálculo con su respectiva incertidumbre. 2 º º Repetir el procedimiento descrito en el numeral 2.3 para tomar los datos de posición x y tiempo t para el cuerpo descendiendo por el plano inclinado con un ángulo 2 respecto a la horizontal y consignar los datos en la tabla 2. Usar PhysicsSensor para hacer una regresión cuadrática de x vs t , y obtener el valor de cada uno de los coeficientes de la regresión cuadrática. Los datos obtenidos pueden modelarse por una ecuación (2) Analizando el coeficiente c1 puede concluirse que la aceleración del bloque está dada por: a x 2 c1 (6a) 7 y su incertidumbre está dada por: uax 2 uc1 (6b) Tabla 2. Descenso de un cuerpo por un plano inclinado ( 1 20º ). x t (m) (s) Posición 1 Posición 2 Posición 3 Posición 4 Posición 5 Posición 6 Posición 7 Posición 8 Posición 9 Posición 10 Posición 11 Posición 12 Posición 13 Posición 14 Posición 15 El dato obtenido a partir de la regresión cuadrática es la medida experimental. Para compararlo se usará el resultado obtenido a partir de la aplicación de la segunda ley de Newton. A continuación calcular la aceleración de acuerdo a la ecuación (1c) y éste resultado se asumirá como el valor convencionalmente verdadero. a x g sen 2 (1c) Determinar el porcentaje de error con la ecuación (7). Asumir como valor de la aceleración de la 2 gravedad g medellin = 9,78 m s . % Error Valor convencionalmente verdadero Valor ex perimental 100 Valor convencionalmente verdadero (7) 8 3. REFERENCIAS [1] M. F. Londoño, Introducción a la Mecánica, Universidad Nacional de Colombia, 2003. Documento elaborado por: Diego Luis Aristizábal Ramírez Esteban González Valencia Tatiana Cristina Muñoz Hernández Universidad Nacional de Colombia Sede Medellín Última revisión: Septiembre/2016 9