TESIS DOCTORAL Modelado biomecánico de los componentes
Anuncio

TESIS DOCTORAL
Modelado biomecánico de los componentes
refractivos del ojo humano y tratamientos
refractivos asociados
Doctoranda
ELENA LANCHARES SANCHO
Ingeniero Industrial por el Centro Politécnico Superior
de la Universidad de Zaragoza
Directores de Tesis
BEGOÑA CALVO CALZADA
Dr. Ingeniero Industrial
&
MANUEL DOBLARÉ CASTELLANO
Dr. Ingeniero Industrial
Programa de Doctorado en Ingenierı́a Biomédica.
Instituto de Investigación en Ingenierı́a de Aragón (I3A).
Centro Politécnico Superior. Universidad de Zaragoza.
Zaragoza, Noviembre de 2.010
ii
A mis padres, Emilio y Marı́a Pilar
iv
v
“Nada nace, ni ha nacido, sin antes haber nadado”
J. Araujo
vi
Agradecimientos
Quiero agradecer a mis Directores de Tesis, Begoña Calvo Calzada y Manuel
Doblaré Castellano, la confianza que depositaron en mı́ desde el principio para llevar
a cabo este proyecto. Agradecer, en general, a todos los compañeros del área de
Mecánica de Medios Continuos y Teorı́a de Estructuras, ası́ como a los miembros del
GEMM, el apoyo y ayuda que siempre me han prestado, no sólo a nivel profesional
sino también personal. En especial quisiera citar a Begoña, Amaya, Ma Ángeles y
Fany; a Victor Alastrué, cuya ayuda constante y desinteresada fue crucial en los
comienzos de esta Tesis; y al personal del laboratorio, por su profesionalidad y buen
hacer.
También quiero agradecer a Santiago Tuquet, de Mercazaragoza, a Javier GómezArrúe, de la Facultad de Veterinaria, y a Mame Navarro, de la Unidad Mixta de
Investigación, la ayuda prestada ası́ como su atención y amabilidad. Gracias a ellos
pude realizar el trabajo de campo de esta Tesis. Ası́mismo, quisiera citar a Rafael
Navarro Belsué, del ICMA, por sus magistrales explicaciones de los misterios de la
Óptica.
Mi agradecimiento, profundamente sincero, a todo el equipo médico del Servicio
de Oftalmologı́a del Hospital Clı́nico Universitario “Lozano Blesa” de Zaragoza, con
el Dr. José Ángel Cristóbal Bescós a la cabeza, y la Dra. Ma Ángeles del Buey
Sayas, quienes me hicieron sentir desde el principio de nuestra colaboración como
una doctora más; al Dr. Carlos Palomino Bautista, por su entrañable amistad, y al
Dr. Antonio Mateo Orobia, gran profesional y excelente persona.
Finalmente, deseo agradecer a Ruth L, Ruth G y Silvia, Ma Luz y Arancha, Isa,
Nacho y Joa, por estar siempre a mi lado; a mi hermanita y compañera durante
todo este periplo, por su cariño y apoyo; a Cuca y Antonio, mis segundos padres, y
a mi hermano Emilio, por su callada preocupación. A mi madre Marı́a Pilar, mujer
a la que admiro y a mi padre Emilio, el anterior Dr. Lanchares. Y a David, el mejor
regalo.
Índice General
Índice General
xii
1 Introducción
1.1 Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Estado del arte . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2.1 Modelado de la córnea humana . . . . . . . . . . . . . . . .
1.2.2 Modelado del cristalino humano . . . . . . . . . . . . . . . .
1.3 Objetivos, metodologı́a y alcance de la tesis . . . . . . . . . . . . .
1.3.1 Modelado adaptativo de la geometrı́a . . . . . . . . . . . . .
1.3.2 Caracterización del material corneal . . . . . . . . . . . . . .
1.3.3 Modelo de comportamiento . . . . . . . . . . . . . . . . . .
1.3.4 Simulación numérica de tratamientos refractivos . . . . . . .
1.3.5 Modelado del cristalino humano y simulación del mecanismo
de acomodación . . . . . . . . . . . . . . . . . . . . . . . . .
1.4 Descripción de la tesis . . . . . . . . . . . . . . . . . . . . . . . . .
1
1
3
3
8
11
12
12
13
13
2 Anatomı́a, fisiologı́a y óptica del aparato ocular humano
2.1 Anatomı́a del aparato ocular . . . . . . . . . . . . . . . . .
2.1.1 Formación del globo ocular . . . . . . . . . . . . . .
2.1.2 La órbita . . . . . . . . . . . . . . . . . . . . . . .
2.1.3 El globo ocular . . . . . . . . . . . . . . . . . . . .
2.1.4 Órganos anexos . . . . . . . . . . . . . . . . . . . .
2.2 La óptica del ojo humano . . . . . . . . . . . . . . . . . .
2.2.1 Refracción . . . . . . . . . . . . . . . . . . . . . . .
2.2.2 La refracción en el ojo . . . . . . . . . . . . . . . .
2.2.3 Óptica del cristalino. Mecanismo de acomodación .
2.2.4 Anomalı́as en la capacidad de refracción . . . . . .
2.3 Medida y diagnosis . . . . . . . . . . . . . . . . . . . . . .
2.3.1 Equipos comunes de examen y diagnosis . . . . . .
2.3.2 Ocular Response Analyzer (ORA) . . . . . . . . . .
2.3.3 Otros . . . . . . . . . . . . . . . . . . . . . . . . . .
2.4 Análisis óptico de los resultados . . . . . . . . . . . . . . .
2.4.1 Algunos conceptos básicos . . . . . . . . . . . . . .
2.4.2 Aberraciones . . . . . . . . . . . . . . . . . . . . .
2.4.3 El método de trazado de rayos . . . . . . . . . . . .
ix
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. 14
. 14
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
17
17
18
20
20
38
43
43
45
46
51
61
61
67
69
70
71
73
76
x
ÍNDICE
3 Tratamientos refractivos
3.1 Breve historia de la cirugı́a refractiva . . . . . . . . . . . . . . . .
3.2 Técnicas quirúrgicas refractivas actuales . . . . . . . . . . . . . .
3.2.1 La cirugı́a de la catarata . . . . . . . . . . . . . . . . . . .
3.2.2 Cirugı́a incisional para corrección del astigmatismo. . . . .
3.2.3 Cirugı́a refractiva con láser: LASIK y PRK . . . . . . . . .
3.3 Tratamientos más recientes para el queratocono . . . . . . . . . .
3.3.1 Implantes de segmentos de anillos intraestromales . . . . .
3.3.2 La técnica del cross-linking . . . . . . . . . . . . . . . . .
3.3.3 Técnicas combinadas para el tratamiento del queratocono.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
81
81
85
85
88
95
99
102
108
111
4 Modelado numérico de los tejidos del globo ocular
4.1 Comportamiento mecánico de los tejidos blandos . . . . . . .
4.2 Modelado del comportamiento elástico . . . . . . . . . . . . .
4.2.1 Descripción de la deformación . . . . . . . . . . . . . .
4.2.2 Respuesta tensional hiperelástica . . . . . . . . . . . .
4.2.3 Tensor de comportamiento elástico . . . . . . . . . . .
4.2.4 Modelos hiperelásticos para los tejidos del globo ocular
4.3 Particularización del modelo 3D al elemento membrana . . . .
4.4 Incorporación de la pretensión . . . . . . . . . . . . . . . . . .
4.4.1 Metodologı́a para la inclusión de tensiones residuales .
4.4.2 Reproducción de las condiciones iniciales . . . . . . . .
4.5 Modelado del comportamiento viscohiperelástico . . . . . . . .
4.6 Modelo viscohiperelástico anisótropo . . . . . . . . . . . . . .
4.7 Ecuaciones de Evolución para las variables internas . . . . . .
4.7.1 Algoritmo de integración temporal . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
113
114
118
118
119
123
125
128
131
132
134
135
136
138
139
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
5 Caracterización de las propiedades de material de los tejidos
145
5.1 Metodologı́a de la realización de ensayos . . . . . . . . . . . . . . . . 146
5.1.1 Obtención de los tejidos . . . . . . . . . . . . . . . . . . . . . 146
5.1.2 Traslado y mantenimiento . . . . . . . . . . . . . . . . . . . . 148
5.1.3 Extracción de la probeta . . . . . . . . . . . . . . . . . . . . . 148
5.1.4 Realización del ensayo de tracción uniaxial . . . . . . . . . . . 152
5.2 Resultados de los ensayos . . . . . . . . . . . . . . . . . . . . . . . . 154
5.2.1 Tejido corneal . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
5.2.2 Tejido escleral . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
5.2.3 Tejido corneal con tratamiento de cross-linking . . . . . . . . . 157
5.3 Comportamiento del tejido . . . . . . . . . . . . . . . . . . . . . . . . 160
5.3.1 Respuesta hiperelástica anisótropa de los tejidos blandos . . . 160
5.3.2 Estimación de los parámetros . . . . . . . . . . . . . . . . . . 162
5.4 Determinación de las propiedades viscoelásticas del tejido corneal . . 172
5.4.1 Realización del ensayo de viscoelasticidad mediante ciclos de
relajación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172
5.4.2 Modelo de viscoelasticidad. Estudio de la bondad del modelo . 175
5.5 Determinación de las propiedades de los tejidos del cristalino . . . . . 178
5.6 Discusión y conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . 182
ÍNDICE
xi
187
6 Simulación numérica de tratamientos refractivos
6.1 Modelado del ojo humano . . . . . . . . . . . . . . . . . . . . . . . . 187
6.1.1 Modelado de la geometrı́a base . . . . . . . . . . . . . . . . . 188
6.1.2 Modelos de elementos finitos . . . . . . . . . . . . . . . . . . . 190
6.1.3 Modelo personalizado de córnea . . . . . . . . . . . . . . . . . 195
6.2 Modelo constitutivo del material . . . . . . . . . . . . . . . . . . . . . 198
6.3 Condiciones iniciales y de contorno . . . . . . . . . . . . . . . . . . . 200
6.4 Cirugı́a incisional I: Arcuatas . . . . . . . . . . . . . . . . . . . . . . 201
6.4.1 Simulación de la cirugı́a . . . . . . . . . . . . . . . . . . . . . 202
6.4.2 Cambio astigmático inducido: estimación . . . . . . . . . . . . 204
6.4.3 Influencia de la rigidez del material . . . . . . . . . . . . . . . 207
6.4.4 Resultados ópticos según el Método de Trazado de Rayos . . . 208
6.4.5 Resultados en tensiones . . . . . . . . . . . . . . . . . . . . . 217
6.4.6 Discusión . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 220
6.5 Cirugı́a incisional II. Incisiones relajantes limbares . . . . . . . . . . . 223
6.5.1 Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223
6.5.2 Simulación de las IRL . . . . . . . . . . . . . . . . . . . . . . 224
6.5.3 Variación de la longitud de la incisión . . . . . . . . . . . . . . 226
6.5.4 Variación de la profundidad de la incisión . . . . . . . . . . . 226
6.5.5 Variación de la zona óptica . . . . . . . . . . . . . . . . . . . . 229
6.5.6 Comparación con resultados clı́nicos . . . . . . . . . . . . . . . 230
6.5.7 Comparación con diversos nomogramas. Consideración de
otros parámetros . . . . . . . . . . . . . . . . . . . . . . . . . 233
6.5.8 Discusión . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 234
6.6 Cirugı́a refractiva con láser excı́mer: PRK . . . . . . . . . . . . . . . 235
6.6.1 Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . 235
6.6.2 Simulación de la cirugı́a . . . . . . . . . . . . . . . . . . . . . 236
6.6.3 Importancia de la introducción de las tensiones iniciales . . . . 237
6.6.4 Importancia de la PIO en los resultados refractivos . . . . . . 240
6.6.5 Discusión . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 241
6.7 Tratamientos combinados para el queratocono: cross-linking + inserción de segmentos intraestromales . . . . . . . . . . . . . . . . . . 243
6.7.1 Modelo patológico de queratocono . . . . . . . . . . . . . . . . 243
6.7.2 Implante de segmentos de anillos intraestromales . . . . . . . 247
6.7.3 Tratamiento de cross-linking de colágeno corneal . . . . . . . . 249
6.7.4 Tratamientos combinados . . . . . . . . . . . . . . . . . . . . 252
6.7.5 Discusión . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 255
6.8 Caracterización in vivo de la viscoelasticidad del tejido corneal: ORA. 256
6.8.1 Simulación de la medida realizada por ORA . . . . . . . . . . 257
6.8.2 Metodologı́a para la estimación de los parámetros de viscoelasticidad in vivo . . . . . . . . . . . . . . . . . . . . . . . . . . . 258
7 Simulación de la acomodación y estudio de la
7.1 Introducción . . . . . . . . . . . . . . . . . . .
7.2 Modelo paramétrico de cristalino humano. . .
7.2.1 Modelo geométrico paramétrico. . . . .
presbicia
261
. . . . . . . . . . . . . 261
. . . . . . . . . . . . . 261
. . . . . . . . . . . . . 261
xii
ÍNDICE
7.3
7.4
7.5
7.6
7.2.2 Modelo de Elementos Finitos. . . . . . . . . . . . .
Hipótesis . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Cargas y condiciones de contorno . . . . . . . . . . . . . .
Simulación del mecanismo de acomodación humano . . . .
7.5.1 Determinación de las fuerzas ciliares . . . . . . . .
7.5.2 Modificación de las propiedades de los tejidos con la
Discusión . . . . . . . . . . . . . . . . . . . . . . . . . . .
8 Conclusiones y desarrollo futuro
8.1 Resumen de la tesis . . . . . . .
8.2 Conclusiones . . . . . . . . . . .
8.2.1 Conclusiones mecánicas
8.2.2 Conclusiones clı́nicas . .
8.3 Aportaciones originales . . . . .
8.4 Resultados de investigación . .
8.5 Lı́neas futuras . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. . .
. . .
. . .
. . .
. . .
edad
. . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
267
269
270
271
271
276
285
.
.
.
.
.
.
.
291
. 291
. 292
. 292
. 293
. 294
. 295
. 301
Capı́tulo 1
Introducción
1.1
Introducción
El ser humano es visual. Existen evidencias que apuntan a que el desarrollo
evolutivo del cerebro humano está muy ligado a las habilidades manuales y visuales,
ambas a su vez ligadas entre sı́. En las sociedades avanzadas, el ojo es el receptor último de más del 90% de la información que llega al cerebro desde el exterior.
Por ello, la repercusión tanto en la calidad de vida como en otros aspectos (productividad, seguridad vial, etc.) de los problemas oculares más comunes adquiere
gran relevancia. La incidencia de los problemas refractivos (miopı́a, astigmatismo,
etc.) es muy elevada, en torno al 40% de la población, y patologı́as asociadas a la
edad, como la presbicia o la catarata, pueden afectar a prácticamente el 100% de la
población de edad avanzada. La cirugı́a de la catarata es la que más se practica en
nuestro paı́s, mientras que la cirugı́a refractiva de córnea (PRK, LASIK, etc.) lleva
camino de igualar o incluso superar este registro. Otro problema refractivo de gran
incidencia, la presbicia o vista cansada, afecta a la práctica totalidad de la población
a partir de edades no demasiado avanzadas (a los 45 años ya afecta al 70% de la
población, y a los 50 años prácticamente al 100%). Dada esta enorme repercusión,
las mejoras en los productos, técnicas y procedimientos para tratamientos de las
distintas patologı́as oculares tienen una gran impacto socioeconómico.
En las patologı́as más comunes y frecuentes, la comunidad clı́nica tiene la posibilidad de alcanzar pronto una cierta experiencia en cuanto a nuevas técnicas de
tratamiento, quirúrgicas o no, estableciendo protocolos que garanticen el resultado
del tratamiento. Sin embargo, existen patologı́as oculares infrecuentes y graves que
precisan de soluciones, tanto desde el punto de vista refractivo como fisiológico, y
cuyo éxito serı́a más certero si el cirujano dispusiera de herramientas que permitieran
planificar la cirugı́a a realizar. Por otra parte, los tratamientos personalizados se
están constituyendo en herramientas de gran utilidad, enfocadas al objetivo de alcanzar la emetropı́a y una buena calidad óptica y visual postoperatoria. En este
sentido, el desarrollo de nuevas tecnologı́as y la propuesta de avanzados modelos
de comportamiento de los tejidos permiten desarrollar modelos de simulación que
1
2
Modelado del ojo humano y tratamientos refractivos
contemplan tanto aspectos biomecánicos como ópticos, ayudando a los cirujanos a
planificar los diferentes tratamientos.
En este contexto, la finalidad de esta tesis es contribuir al avance cientı́fico,
técnico y clı́nico en este campo netamente pluridisciplinar, aportando nuevas herramientas para mejorar el conocimiento del comportamiento de las diferentes estructuras que intervienen en la refracción del globo ocular, tanto en condiciones
fisiológicas como tras diferentes tratamientos.
Se plantea una metodologı́a que permite construir modelos de diversas estructuras del ojo humano, en concreto córnea y cristalino, reproduciendo factores anatómicos y funcionales con la finalidad de realizar simulaciones numéricas con la
mayor precisión y realismo posibles, ası́ como predecir el comportamiento tras un
determinado tratamiento quirúrgico. Estos modelos, junto con herramientas de optimización apropiadas, han de permitir en el futuro el diseño personalizado de cirugı́as
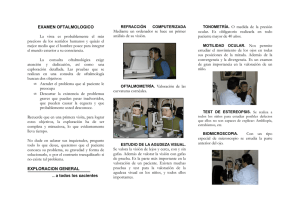
con la posibilidad de estimar los resultados postquirúrgicos, evaluar riesgos y predecir posibles comportamientos ante una variedad de situaciones. La Figura 1.1
muestra la simulación mediante elementos finitos de una incisión relajante limbar
para corrección de astigmatismo; en la simulación pueden evaluarse los efectos de
cada parámetro relativo a la cirugı́a (longitud de la incisión, posición, etc.) obteniendo ası́ resultados objetivos de su efecto refractivo postoperatorio.
Figura 1.1: Izquierda: Incisión relajante limbar para corrección de astigmatismo.
Derecha: Distribución de desplazamientos obtenida por simulación numérica de la
incisión limbar, mediante elementos finitos.
El desarrollo de modelos realistas y paciente-especı́ficos requiere de la completa
caracterización de los parámetros personalizados, mediante la realización de medidas
tomadas del ojo del paciente (topografı́a, aberrometrı́a, biometrı́a, medida de presión
intraocular, refracción, histéresis y factor de resistencia corneal, agudeza visual,
etc.), ası́ como de los métodos numéricos necesarios para implementar y calcular
los modelos biomecánicos asociados. Tan importante como una buena calidad en el
modelado, es la validación, hasta el punto actualmente posible, y su funcionalidad,
por lo que una parte esencial de la tesis es la evaluación de distintas aplicaciones
concretas de tratamientos quirúrgicos y correcciones ópticas con los modelos propuestos.
Capı́tulo 1. Introducción
1.2
3
Estado del arte
En los últimos años se ha producido una revolución en las herramientas de diagnóstico clı́nico, de forma que equipos tales como los topógrafos corneales, biómetros,
sistemas de imagen por tomografı́a de coherencia óptica (OCT), etc., son cada vez
más comunes en las clı́nicas oftalmológicas. Esto ha dado lugar a un gran avance en
el desarrollo de modelos geométricos cada vez más complejos, a partir de los cuales
es posible estimar las dimensiones y la calidad óptica de la córnea [Navarro et al.,
2006a].
El modelado óptico de las diversas estructuras refringentes (córnea, cristalino)
considera, además de la geometrı́a, el gradiente de ı́ndice de refracción (GRIN) del
medio en cuestión. Este hecho se conoce desde antiguo y aparece ya recogido, de
forma simplificada, en el trabajo de A. Gullstrand, quien llegó a obtener en 1.911 el
premio Nobel. El GRIN ha sido incorporado en diversos trabajos de modelado óptico
[Siedlecki et al., 2004; Navarro et al., 2007a,b]. Asimismo, se han desarrollando
modelos acomodativos considerando invariantes geométricos y mecánicos durante
la acomodación [Navarro et al., 2007a,b, 2009; Popiolek-Masajada and Kasprzak,
2002].
El ojo humano es un sistema de lentes, compuesto por los cuatro medios que
atraviesa la luz hasta alcanzar la retina: córnea, humor acuoso, cristalino y humor
vı́treo. De ellos, la córnea y el cristalino son los de mayor potencia óptica (aproximadamente 40 y 20 dioptrı́as (D), respectivamente, frente a las aproximadamente
60 D totales del ojo joven no présbita). Por ello, esta tesis se centra en el modelado
de estos dos órganos. A continuación, se indican los trabajos más relevantes en el
modelado de ambas estructuras.
1.2.1
Modelado de la córnea humana
Los primeros trabajos en los que se presentaba el modelado numérico por elementos finitos de la córnea fueron realizados a principios de los años 90. Buzard [1992] y
Bryant and McDonnell [1996] desarrollaron modelos bidimensionales axisimétricos,
proponiendo su aplicación a la queratotomı́a radial. Vito et al. [1989] y Pinsky and
Datye [1991] utilizaron modelos tridimensionales para la simulación de cirugı́as refractivas, utilizando un modelo de comportamiento elástico lineal. Pinsky and Datye
[1991] introdujeron en su modelo la heterogeneidad y la anisotropı́a del tejido; sin
embargo, consideraron las direcciones preferenciales de las fibras de colágeno en
orientaciones erróneas, según conocemos hoy en dı́a. Velinsky and Bryant [1992]
asumieron también la hipótesis de elasticidad lineal, desarrollando un modelo del
globo ocular completo para estudiar el efecto, mediante simulación numérica, de las
incisiones radiales para corrección de la miopı́a.
A excepción del trabajo de Pinsky and Datye [1991], los demás modelos consideraban la córnea como homogénea e isótropa. Sin embargo, las caracterı́sticas
4
Modelado del ojo humano y tratamientos refractivos
mecánicas del tejido corneal se deben, principalmente, a su composición histológica
y su microestructura, por lo que también se han realizado numerosos estudios con
el fin de profundizar en su conocimiento y en concreto, de establecer las direcciones
preferenciales de las fibras de colágeno, lo que permitirı́a modelar el comportamiento
del tejido con mayor rigor.
El tejido corneal es heterogéneo. Está compuesto por cinco capas, de entre las
cuales, el estroma representa el 90% del espesor total corneal y está constituido por
capas o lamelas en las que transcurren las fibras de colágeno, adoptando distintas
orientaciones [Foster et al., 2005]. La orientación y distribución del colágeno en
el estroma corneal están relacionadas tanto con las propiedades ópticas como con
las biomecánicas de la córnea. Meek, Newton y sus colaboradores desarrollaron numerosos trabajos para determinar la orientación preferencial de las fibras de colágeno
en el estroma [Meek et al., 1987; Newton and Meek, 1998; Boote et al., 2003],
presentando mapas vectoriales de la orientación y densidad de colágeno obtenidos
mediante la difracción de rayos X en córneas de diversas especies: cerdo, mono,
ratón, pollo [Hayes et al., 2007a; Boote et al., 2008] y humanas, sanas [Aghamohammadzadeh et al., 2004; Boote et al., 2005; Meek and Boote, 2009] o patológicas
[Hayes et al., 2007b]. Por otra parte, los ensayos de tracción uniaxial realizados en
muestras de tejido corneal extraı́das según diversas orientaciones (nasal-temporal,
superior-inferior y direcciones oblı́cuas) han permitido conocer mejor la anisotropı́a
del tejido y su comportamiento mecánico, tanto de tejido corneal humano como
porcino [Elsheikh et al., 2008; Elsheikh and Alhasso, 2009]. De todos estos trabajos
se concluye que las fibras de colágeno de la córnea humana adoptan dos orientaciones preferentes en su zona central, en las direcciones horizontal (nasal-temporal)
y vertical (superior-inferior), lo que confiere al tejido corneal un carácter anisótropo
altamente no-lineal y con grandes deformaciones [Bryant and McDonnell, 1996].
Esta anisotropı́a causa birrefringencia, que puede ser observada mediante imagen
polarimétrica y ha sido utilizada por Elsheikh et al. [2007b] para determinar las
propiedades elásticas del tejido.
Los modelos de córnea desarrollados en la literatura consideran generalmente
que el tejido corneal debe su comportamiento al estroma, despreciando el efecto
estructural de las otras capas: las más externas, epitelio y membrana de Bowman
y las internas, membrana de Descemet y endotelio. Esta aproximación es aceptable desde el punto de vista estructural puesto que, de estas cuatro membranas,
únicamente la membrana de Bowman presenta una rigidez comparable al estroma
y contiene fibras de colágeno orientadas aleatoriamente [Komai and Ushiki, 1991a].
Sin embargo, dado que el espesor de la membrana de Bowman es muy pequeño en
comparación con el espesor estromal (entre 8 y 12 µm, frente a unas 500 µm) y que
sus propiedades mecánicas no influyen de forma apreciable en la córnea, según se
ha demostrado en ensayos de tracción uniaxial en córneas en las que la membrana
de Bowman habı́a sido retirada previamente [Seiler et al., 1992], dicha membrana
no ha sido considerada por los diversos modelos que se han ido presentando [Dupps
Capı́tulo 1. Introducción
5
and Wilson, 2006].
Shin et al. [1997] desarrolló un modelo axisimétrico de membrana, utilizando un
comportamiento de material elástico lineal, cuasi-incompresible y ortótropo, introduciendo de esta forma las dos direcciones preferenciales de las fibras de colágeno
en el área central de la córnea. Anderson et al. [2004] introdujo la hiperelasticidad
según el modelo de Ogden, en un modelo anisótropo de membrana. Elsheikh and
Wang [2007], basándose en el mismo modelo constitutivo, desarrollaron un sencillo
modelo tridimensional de elementos tetraédricos con el que reprodujeron el comportamiento experimental de córneas de cerdo en ensayos de inflado. Posteriormente,
surgieron otros modelos hiperelásticos, incorporando la anisotropı́a del tejido [Pinsky
et al., 2005; Alastrué et al., 2006; Cabrera et al., 2006b; Pandolfi and Manganiello,
2006]. Pinsky et al. [2005] propusieron un modelo de comportamiento anisótropo
para córnea y esclera en el que la función de densidad de energı́a del estroma se estimaba según las orientaciones preferenciales de las lamelas en el espesor del estroma
basado en las determinadas anteriormente por Meek and Newton [1999], utilizando
una distribución probabilista de las orientaciones de las fibras de colágeno a través
del estroma corneal. Se consideraba, en cada lamela, la contribución de las fibras
de colágeno y de la matriz extracelular, a las cuales asignaba distintas funciones
de densidad de energı́a de deformación debido a su distinto comportamiento: a la
matriz extracelular, un modelo isótropo y cuasi-incompresible, por su alto contenido
en agua; a las fibras, un modelo exponencial dependiente de la orientación. Alastrué
et al. [2006] presentó un modelo de comportamiento basado en el de Holzapfel, el
cual consideraba las dos orientaciones preferenciales del colágeno estromal, realizando simulaciones de cirugı́a incisional para corrección del astigmatismo y de ablación
láser PRK para corrección de miopı́a. Posteriormente, Lanchares et al. [2008] y
Pandolfi et al. [2009] presentaron trabajos en los que se reproducı́an dichas técnicas
quirúrgicas, incorporando a los modelos una tercera familia de fibras en dirección
circunferencial, a nivel limbar; la pretensión del tejido antes de la simulación de la
cirugı́a y la incorporación de parte de esclera alrededor de la córnea, permitiendo
desplazamientos en el limbo, condición menos restrictiva que la de impedir los desplazamientos en la periferia corneal.
El tejido corneal, como la mayorı́a de los tejidos blandos, muestra un comportamiento altamente no lineal, por lo que en los trabajos anteriormente citados se
utilizan modelos de comportamiento hiperelásticos [Hoeltzel et al., 1992; Bryant
and McDonnell, 1996; Zeng et al., 2001; Elsheikh et al., 2007b]. Sin embargo, en
condiciones fisiológicas normales (en torno a 15 mmHg) y hasta valores de unos
25 mmHg, el tejido corneal muestra una respuesta cuasi-lineal, por lo que algunos
modelos desarrollados recientemente asumen esta simplificación [Crouch et al., 2005;
Gefen et al., 2009]. A pesar de ello, un correcto modelado del tejido debe basarse
en modelos de comportamiento hiperelástico, dado que es capaz de reproducir el
comportamiento del tejido con mayor rigor, tanto a pequeños valores de tensiones,
entre los que se encuentran las fisiológicas sanas, como a mayores valores de presión
6
Modelado del ojo humano y tratamientos refractivos
intraocular. Las simulaciones numéricas, en ocasiones, reproducen situaciones en
condiciones no fisiológicas, por ejemplo, cirugı́as o patologı́as, en las que se provocan estados tensionales en el tejido que pueden alcanzar valores muy superiores a
los correspondientes al rango de presiones fisiológicas con respuesta lineal.
Una mejora relevante que han incorporado recientemente algunos modelos es la
definición de un campo de deformaciones o tensiones iniciales en el tejido para solucionar el problema del desconocimiento de la geometrı́a de la córnea en ausencia de
presión intraocular (PIO) [Pinsky et al., 2005; Lanchares et al., 2008; Pandolfi et al.,
2009]. De esta forma, se logra reproducir en el modelo las condiciones fisiológicas in
vivo, realizando posteriormente simulaciones más realistas.
Los modelos más recientes basan el modelado del comportamiento en la microestructura del tejido [Studer et al., 2010; Pandolfi et al., 2009], de forma que
la anisotropı́a corresponde a una distribución probabilista del colágeno en el estroma corneal. Grytz [2008] ha desarrollado recientemente un modelo multiescala
considerando la estructura de los tejidos a tres niveles, micro-, meso- y macro-.
La fiabilidad de los modelos de comportamiento depende fuertemente de la bondad del valor de los parámetros que definen el comportamiento del material, los
cuales son estimados mediante un proceso de ajuste de las curvas de comportamiento
obtenidas de forma experimental. Los valores de módulo de Young que se encuentran en bibliografı́a abarcan un amplio rango de órdenes de magnitud [Bryant and
N
N
McDonnell, 1996], desde 0.025 mm
2 [Sjontoft and Edmund, 1987] hasta 17 mm2
[Hjortdal and Jensen, 1992], debido no sólo a la variabilidad biológica de las muestras utilizadas por los distintos trabajos, sino también al nivel de hidratación de los
tejidos, condiciones de carga y otros aspectos que pueden variar en las técnicas utilizadas para la extracción, conservación y realización del ensayo [Dupps and Wilson,
2006].
El módulo de Young caracteriza un comportamiento elástico lineal; sin embargo,
como se ha comentado anteriormente, la córnea a elevada presión intraocular se
muestra altamente no-lineal. Para su caracterización se han realizado numerosos
trabajos que presentaban resultados correspondientes a ensayos de tracción uniaxial con tejido corneal de cerdo y de humano: Hoeltzel et al. [1992]; Bryant et al.
[1994]; Zeng et al. [2001]; Jayasuriya et al. [2003]; Wollensak et al. [2003b]. Estos
ensayos permiten el análisis del comportamiento del tejido en una dirección determinada, por lo que el estudio de las direcciones preferenciales (superior-inferior y
nasal temporal) ası́ como el de direcciones oblı́cuas permite un mejor conocimiento
de la anisotropı́a del tejido. Elsheikh et al. [2008] concluyeron que las direcciones
preferenciales presentan un comportamiento similar, siendo más rı́gida la dirección
vertical (superior-inferior) que la horizontal (nasal-temporal) a altas velocidades de
ensayo; las orientaciones oblı́cuas son mucho menos rı́gidas. La realización de ensayos de inflado, tanto de córneas humanas [Bryant and McDonnell, 1996; Elsheikh
et al., 2007a] como de globo completo [Hjortdal and Jensen, 1995], proporciona curvas de desplazamiento del ápex corneal o de otros puntos de la superficie corneal
Capı́tulo 1. Introducción
7
determinados por marcadores, ante un aumento de la presión de cámara anterior.
Al contrario que en el ensayo de tracción uniaxial, en el de inflado se reproducen las
condiciones fisiológicas; sin embargo, el comportamiento del tejido en una dirección
determinada no puede ser aislado.
Además de la respuesta a corto plazo del tejido corneal, también se han realizado ensayos para estudiar la respuesta viscoelástica del tejido. Diversos ensayos
de carga cı́clica y de relajación de tensiones muestran que el comportamiento del
tejido corneal es dependiente del tiempo, es decir, presenta viscoelasticidad [Nyquist,
1968; Hoeltzel et al., 1992; Bryant and McDonnell, 1996; Zeng et al., 2001; Boyce
et al., 2007]. Basándose en el trabajo de Boyce et al. [2007], quien realizó ensayos
de tracción a distintas velocidades de deformación y ensayos de creep, Nguyen et al.
[2008] desarrollaron un modelo de comportamiento viscoelástico para la córnea.
Ahearne et al. [2007] realizó ensayos de indentación sobre córneas humanas y de
cerdo, caracterizando la viscoelasticidad del tejido a partir de la relación entre
la fuerza aplicada y los desplazamientos apicales provocados a cada instante. De
todos los trabajos de simulación numérica de córnea que han sido desarrollados,
únicamente Kaliske [2000] ha incorporado la viscoelasticidad para la posterior simulación del tejido corneal. Kaliske [2000] desarrolló un modelo de comportamiento
para materiales compuestos reforzados con fibras en grandes deformaciones, indicando su interés en cuanto a su aplicación a tejidos biológicos, y en particular, presenta resultados de un modelo de elementos finitos de córnea, en el que analizó las
deformaciones producidas en la curvatura corneal al aplicar la presión intraocular,
ası́ como al simular una sutura aislada.
Las propiedades biomecánicas de la córnea pueden ser medidas in vivo desde
la aparición reciente del aparato denominado Ocular Response Analyzer (Reichert
Ophthalmic Instruments, Inc., Depew, New York), el cual mide ciertos parámetros
de la córnea relacionados con su rigidez (Corneal Resistance Factor o CRF) y viscoelasticidad (histéresis corneal o CH) [Luce, 2005], que hasta la fecha no han sido
incorporados a modelos de comportamiento implementados numéricamente, siendo
su aplicación actual fundamentalmente clı́nica [Ortiz et al., 2007; del Buey et al.,
2009b; Saad et al., 2009].
El interés del modelado numérico de la córnea tiene como objetivo predecir la
respuesta de dicho órgano ante diversas situaciones, como cirugı́as, tratamientos
no quirúrgicos o patologı́as. De esta forma, en diversos trabajos en la bibliografı́a
disponible se presenta su aplicación para el análisis de su comportamiento en situaciones naturales [Alastrué et al., 2006], el análisis de su respuesta ante intervenciones
quirúrgicas de cirugı́a refractiva [Deenadayalu et al., 2006; Pandolfi et al., 2009],
cirugı́a incisional para corrección de astigmatismo [Lanchares et al., 2008], queratotomı́a radial para corrección de la miopı́a [Bryant and McDonnell, 1996]; queratoplastia (transplante de córnea) [Cabrera et al., 2006b; Djotyan et al., 2006]; modificaciones corneales inducidas no quirúrgicamente, como la tonometrı́a de aplanación
para la medida de la presión intraocular [Cabrera et al., 2006c; Elsheikh et al., 2006];
8
Modelado del ojo humano y tratamientos refractivos
patologı́as, como el queratocono [Pandolfi and Manganiello, 2006; Gefen et al., 2009],
o bien, su incorporación a modelos opto-biomecánicos que evalúan la calidad visual
después de un determinado tratamiento [Navarro et al., 2009], para los cuales debe
desarrollarse un modelo geométrico realista de las curvaturas anterior y posterior
[Navarro et al., 2006a; Dubbelman et al., 2006].
1.2.2
Modelado del cristalino humano
El proceso de acomodación y su declive gradual con la edad es motivo de gran
interés en la investigación oftalmológica, debido al alto impacto social de la presbicia.
Uno de los principales problemas para su estudio y modelado es la falta de acuerdo
sobre el mecanismo fisiológico de la acomodación, dando lugar a diversas teorı́as. La
más aceptada por la mayorı́a de autores es la Teorı́a de Helmholtz [von Helmholtz,
1924], según la cual, el cristalino en el estado totalmente acomodado (visión cercana)
adopta su configuración natural, no actuando ninguna acción externa sobre él, y
correspondiendo este estado a una contracción del músculo ciliar. Otras dos teorı́as
deben ser mencionadas, dado que su discusión permanece vigente: la Teorı́a de
Schachar [Schachar et al., 1993] postula el mecanismo a la inversa, es decir, la
relajación del músculo ciliar como causa de acomodación, y la Teorı́a de Coleman
[Coleman, 1970] involucra en el proceso al cuerpo vı́treo como desencadenante de
un gradiente de presiones responsable del proceso de acomodación.
Entre todas las propuestas, la teorı́a de acomodación de Helmholtz es la más
aceptada puesto que parece confirmarse mediante observaciones experimentales ex
vivo [Glasser and Campbell, 1998, 1999; Krag and Andreassen, 2003a] e in vivo
[Brown, 1973; Koretz et al., 2002; Dubbelman et al., 2005]. Por ejemplo, se ha
observado en imágenes tomadas mediante resonancia magnética de pacientes con
edades entre 18 y 35 años, una disminución de los radios de curvatura anterior
y posterior, y del diámetro ecuatorial, ası́ como un aumento del espesor axial del
cristalino, durante el proceso de acomodación [Hermans et al., 2009]. Asimismo, se
ha observado mediante biomicroscopı́a ultrasónica en monos rhesus iridectomizados
(la ausencia de iris permite observar la porción de cristalino que permanece oculta
tras él), que el cristalino en el estado de máxima acomodación se desplaza ligeramente hacia abajo a causa de la acción de la gravedad, lo que implica que la tensión
de la zónula se ha liberado [Croft et al., 2006].
Mientras que la teorı́a de Helmholtz es la más comúnmente aceptada para explicar las bases del mecanismo de acomodación, no ocurre lo mismo para explicar
las causas de la presbicia. Siendo un hecho que, con la edad, se producen cambios
tanto en el cristalino como en las estructuras extra-lenticulares, aún no se ha podido
determinar la causa exacta de la pérdida de acomodación que conduce a la misma.
La teorı́a de Helmholtz apunta como causa única a la pérdida de elasticidad del cristalino. Fincham [1937] plantea, por el contrario, que es la pérdida de elasticidad de
la cápsula con la edad la que impide la acomodación, al no ser ya capaz de dar forma
Capı́tulo 1. Introducción
9
al interior del cristalino. Además, han ido surgiendo otras propuestas contrapuestas,
como las de Duane-Fincham y Hess-Gullstrand; la primera de ellas responsabilizaba
al cristalino, y la segunda, a las estructuras extralenticulares. Weale [1989] sugirió
que la causa podı́a ser multifactorial. La teorı́a geométrica de Koretz and Handelman [1988] atribuye la presbicia al aumento continuo del espesor capsular a lo
largo de la vida, que llega a impedir que el músculo ciliar sea capaz de realizar el
movimiento necesario para la acomodación. Una modificación de esta teorı́a fue introducida por Strenk et al. [2005], quien atribuyó la presbicia a la disminución de la
tensión zonular a causa del continuo aumento, con la edad, del espesor del cristalino,
lo que hace que el movimiento del músculo ciliar sea completamente ineficaz para
realizar la acomodación [Strenk et al., 2010]. En 1992, Bito y Miranda propusieron
que la pérdida de elasticidad de la coroides es la que impide que el músculo ciliar
pueda recuperar su estado en reposo.
El modelado y la simulación numérica asociadas ofrecen la posibilidad de obtener
información cuantitativa, no medible in vivo, de las estructuras implicadas en el
mecanismo de acomodación [Krag and Andreassen, 2003a; Burd et al., 2006; Hermans et al., 2008], por lo que han sido desarrollados diversos modelos biomecánicos.
Los primeros simplificaban la geometrı́a reduciéndola a dos dimensiones y utilizaban propiedades elásticas para determinar las tensiones que aseguraban el estado
de equilibrio en los estados acomodado y no-acomodado [Koretz et al., 1984]. Más
recientemente se ha utilizado del método de los elementos finitos para predecir el
movimiento antero-posterior del cristalino durante la acomodación, sus deformaciones (desplazamientos de los polos, modificación de las curvaturas anterior y posterior) y sus correspondientes cambios en la potencia óptica [Ljubimova et al., 2007;
Burd et al., 2002]. En todos esos modelos se consideraba que núcleo, córtex y cápsula
se comportan como un material elástico lineal, homogéneo e isótropo [Fisher, 1969;
Krag et al., 1997; Krag and Andreassen, 2003a; Hermans et al., 2006].
Únicamente dos modelos en la bibliografı́a han aplicado un comportamiento no
lineal. Pedrigi et al. [2007] modelaron el comportamiento de la cápsula según el
modelo hiperelástico de Fung, realizando la simulación de inflado de la cápsula.
De esta manera, obtuvieron el campo de tensiones en el tejido capsular bajo distintas perturbaciones mecánicas, que pueden afectar al tejido capsular durante la
cirugı́a de la catarata, provocando la migración de las células epiteliales que produce
opacificación de la cápsula posterior. Burd [2009] afirma que los modelos de comportamiento utilizados anteriormente, elástico lineal e hiperelástico según el modelo de
Fung, no representan de forma realista el comportamiento del tejido capsular, por lo
que propuso un modelo basado en la microestructura de dicho tejido, considerando
la red de fibras de colágeno en una celda rectangular periódica.
La problemática del modelado del cristalino implica la correcta reproducción
de su geometrı́a en los diversos estados del proceso de acomodación, ası́ como la
caracterización de los tejidos implicados. La utilización de técnicas de captación
de imagen como la cámara de Sheimpflug y la imagen por resonancia magnética
10
Modelado del ojo humano y tratamientos refractivos
(MRI) permiten visualizar la completa geometrı́a del cristalino in vivo. Diversos
trabajos han aplicado esta técnica con el fin de observar los cambios geométricos
que se producen en el cristalino durante el proceso de acomodación [Strenk et al.,
1999; Dubbelman et al., 2005], ası́ como la estimación de la interfaz núcleo-córtex
en base a la distribución interior del ı́ndice de refracción [Dubbelman et al., 2003].
Sin embargo, ambas técnicas implican un cierto grado de imprecisión; mientras
las imágenes tomadas por la cámara de Scheimpflug se ven distorsionadas por la
refracción de la córnea y del propio cristalino, debiendo estimarse el error cometido
para obtener una imagen más aproximada a la real [Dubbelman et al., 2003], la
técnica MRI implica ciertas imprecisiones causadas por artefactos de movimiento de
la cabeza o del propio ojo [Levy, 2000; Schachar et al., 2008].
Los modelos geométricos más completos [Navarro et al., 2007a,b; Kasprzak, 2000]
también se basan en observaciones empı́ricas [Dubbelman et al., 2003, 2005], con el
objetivo de reproducir la geometrı́a de forma realista y adaptativa al estado de
acomodación y a la edad.
Las estimaciones de las propiedades de material de los tejidos del cristalino,
cápsula, núcleo y córtex, que se encuentran en bibliografı́a son escasas y medidas in
vitro, por lo que no se reproducen las condiciones fisiológicas. Los primeros ensayos
fueron realizados por Fisher [1969], mediante un disco giratorio en el que se estudiaba
la deformación del cristalino con la rotación, determinando ası́ el módulo elástico
de núcleo y córtex. Los resultados de Fisher, aunque han sido criticados en otros
trabajos [Krag and Andreassen, 1996; Burd et al., 2006], se han utilizado por algunos
autores para caracterizar los tejidos interiores del cristalino en modelos de elementos
finitos [Burd et al., 2002; Belaidi and Pierscionek, 2007] dada la dificultad de realizar
ensayos de dichos tejidos y, por lo tanto, la falta de más valores en bibliografı́a para
poderlos contrastar. La variación de las propiedades de material de núcleo y córtex
con la edad fue posteriormente estimada por Heys et al. [2004], determinando que el
módulo elástico de núcleo es menor en ojos jóvenes que el del córtex; son similares
en torno a los 30 años y, con la edad, el núcleo se hace mucho más rı́gido que el
córtex, multiplicando su módulo elástico en un factor de 450 (núcleo) y 20 (córtex)
entre los 14 y los 78 años de edad. Resultados similares obtuvieron Weeber et al.
[2007] mediante ensayos de indentación con cristalinos del mismo rango de edad
que los utilizados por Heys. Burd et al. [2006] confirmó la tendencia indicada por
estos resultados empı́ricos mediante métodos numéricos; sin embargo, los valores
que determinó para el módulo elástico de núcleo y córtex a los 30 años de edad eran
considerablemente mayores que el obtenido por Heys et al. [2004].
Respecto a las propiedades de material de la cápsula, se han realizado diversos ensayos de tracción uniaxial con anillos de tejido de cápsula anterior de cerdo
[Krag and Andreassen, 1996] y humana [Krag et al., 1997], ası́ como de cápsula
posterior humana [Krag and Andreassen, 2003a], observándose un comportamiento
en grandes deformaciones y altamente dependiente con la edad. Además, Krag and
Andreassen [2003a] realizaron también ensayos de relajación de dicho tejido. Pedrigi
Capı́tulo 1. Introducción
11
y sus colaboradores realizaron ensayos de inflado, con tejido de cápsula anterior de
cerdo [David et al., 2007], ası́ como tejido capsular humano [Pedrigi et al., 2007],
observando un comportamiento no lineal en grandes deformaciones, anisótropo y
con rigidez variable en su geometrı́a, siendo mayor la rigidez de la cápsula en la
dirección circunferencial que en la meridional, en la región próxima al ecuador.
Las fuerzas ejercidas por el músculo ciliar, y transmitidas a la cápsula del cristalino a través de las fibras zonulares, durante el proceso de acomodación, según
la teorı́a de Schachar, o desacomodación, según la teorı́a de Helmholtz, no han
podido ser cuantificadas in vivo. Diversos estudios citados anteriormente confirman
el aumento de rigidez con la edad de núcleo y córtex [Heys et al., 2004; Burd et al.,
2006]. Este hecho fue también observado por Manns et al. [2007], que realizaron
estudios de tracción radial con el bloque de tejidos implicados en la acomodación
(cristalino, fibras zonulares, cuerpo ciliar y anillo escleral), observando la necesidad
de aplicar mayor fuerza a mayor edad para lograr la deformación del cristalino. De
esta forma se concluye que, aunque las fuerzas se mantuvieran con la edad, no serı́an
capaces de provocar en el cristalino el cambio morfológico necesario para realizar la
función acomodativa. La cápsula por sı́ misma no requiere mayor valor de la fuerza
para lograr dicho cambio [Ziebarth et al., 2008], siendo el aumento de rigidez del
córtex y, sobre todo, del núcleo, con la edad, el responsable de la mayor demanda de
fuerza. La experiencia clı́nica muestra que, si bien el músculo ciliar sufre variaciones
en su morfologı́a con la edad [Strenk et al., 2010], su funcionalidad no se modifica,
por lo que las fuerzas ejercidas podrı́an ser de magnitud similar a las del ojo no
présbita [Glasser, 2010].
1.3
Objetivos, metodologı́a y alcance de la tesis
Como se ha comentado anteriormente, el ojo humano es un sistema de lentes compuesto por los cuatro medios que atraviesa la luz hasta alcanzar la retina: córnea,
humor acuoso, cristalino y humor vı́treo. Todos ellos influyen en la refracción total
del ojo; sin embargo, la contribución de humor acuoso y humor vı́treo es tan irrelevante que no se considera en la práctica de la clı́nica refractiva. Únicamente cobra
relevancia en casos con patologı́as que modifican el ı́ndice de refracción del cristalino
(densificación tras hemorragia, flóculos), pudiendo incluso introducir astigmatismos
de alto orden u otras aberraciones.
El objetivo principal de la presente tesis es el modelado biomecánico de los dos
componentes refractivos del ojo humano con mayor potencia óptica: la córnea y
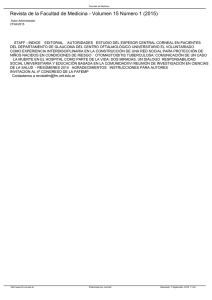
el cristalino. La simulación numérica pretende aportar información al médico oftalmólogo a la hora de planificar un tratamiento refractivo. La Figura 1.2 muestra,
de forma esquemática, la metodologı́a utilizada. Se desarrolla un modelo de elementos finitos, caracterizando el material mediante ensayos de laboratorio y estableciendo las condiciones fisiológicas (presión intraocular, tensiones residuales). Una
12
Modelado del ojo humano y tratamientos refractivos
Figura 1.2: Esquema representativo del proceso de simulación de cirugı́as refractivas.
vez validado, el modelo permite realizar simulaciones de cirugı́as y otros tratamientos. El resultado puede ser analizado mediante métodos ópticos para establecer
la corrección refractiva (astigmatismo y otras aberraciones) obtenida mediante la
simulación numérica.
En concreto, los objetivos especı́ficos que se han marcado para el desarrollo de
la tesis son los siguientes:
1.3.1
Modelado adaptativo de la geometrı́a
Se propondrán distintos modelos geométricos de la córnea humana con los que
se realizarán, posteriormente, las simulaciones de cirugı́as y otros tratamientos. Los
modelos propuestos parten de una aproximación a geometrı́a esférica para el modelado de la córnea emétrope, pasando por una geometrı́a elipsoide basada en modelos ópticos generalizados, hasta una metodologı́a para el modelado personalizado,
basada en las topografı́as y la paquimetrı́a tomadas del paciente.
1.3.2
Caracterización del material corneal
Desde un punto de vista mecánico, el estudio experimental del tejido corneal
pretende la identificación de las propiedades mecánicas de los tejidos a través de la
realización de ensayos, que vienen determinadas por la composición microestructural
del tejido.
Con el fin de determinar las propiedades de material de la córnea, se realizarán
Capı́tulo 1. Introducción
13
ensayos de tracción uniaxial y ciclos de relajación de tejido corneal porcino sano, ası́
como de tejido humano patológico. Se realizarán también ensayos de tejido corneal
de cerdo tras tratamiento de cross-linking corneal, para determinar el refuerzo estructural que dicho tratamiento causa en el tejido.
Con el mismo objeto, la determinación de propiedades de material, se realizarán
ensayos sobre muestras de tejido escleral de cerdo sano.
1.3.3
Modelo de comportamiento
De acuerdo a la respuesta del tejido frente a los ensayos realizados, se planteará
un modelo de comportamiento hiperelástico cuasi-incompresible anisótropo para
modelar el tejido corneal y escleral.
Un rasgo caracterı́stico de los tejidos biológicos es que, en condiciones fisiológicas,
se encuentran sometidos a tensiones residuales. Se planteará una metodologı́a para
la introducción en el tejido de las tensiones iniciales con el fin de reproducir las
condiciones fisiológicas del ojo humano in vivo, previamente a la simulación del
tratamiento refractivo.
1.3.4
Simulación numérica de tratamientos refractivos
Se realizarán simulaciones de cirugı́a incisional relajante para corrección del astigmatismo (incisiones curvas en córnea clara o arcuatas, y en el lı́mite corneo-escleral
o limbares). La planificación de esta técnica quirúrgica se basa generalmente en la
experiencia clı́nica y en tablas que recogen resultados estadı́sticos (nomogramas);
sin embargo, la simulación numérica es capaz de eliminar particularidades de cada
caso, posibilitando la mejora de los nomogramas actuales o el desarrollo de nuevos
nomogramas más objetivos, al excluir el factor cirujano y el caso de cada paciente.
También se posibilita la planificación personalizada de la cirugı́a, mediante la reproducción en el modelo de aspectos particulares del paciente concreto, como su
geometrı́a (topografı́a, paquimetrı́a) e incluso las propiedades biomecánicas de su
tejido corneal (histéresis y factor de resistencia corneal).
Se realizarán simulaciones de cirugı́a refractiva con láser excı́mer para la corrección de la miopı́a, estableciendo resultados que complementan a los clı́nicos, como la
influencia de la presión intraocular en la infracorrección obtenida para altos niveles
de miopı́a (> 6 D) si se realiza la cirugı́a según los parámetros estándar de ablación.
Se realizarán simulaciones de los tratamientos más recientes para la patologı́a
del queratocono, de forma aislada y combinada, para los cuales no existen todavı́a
protocolos estándar, con el fin de aportar a la investigación clı́nica oftalmológica los
resultados biomecánicos.
Modelado del ojo humano y tratamientos refractivos
14
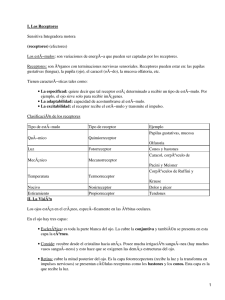
Figura 1.3: Esquema representativo del proceso iterativo para la determinación de
las fuerzas ciliares y propiedades de material de los tejidos del cristalino, a cualquier
edad.
1.3.5
Modelado del cristalino humano y simulación del mecanismo de acomodación
Se propondrá un modelo paramétrico de cristalino humano, capaz de reproducir
la geometrı́a del mismo en función de la edad y del estado acomodativo.
Se expondrá la adaptación a la tipologı́a de membrana del modelo de comportamiento hiperelástico cuasi-incompresible anisótropo, para el modelado del saco
capsular de cristalino humano. Los componentes internos del cristalino (córtex y
núcleo) se modelarán según el mismo modelo de comportamiento planteado para el
tejido corneal.
Finalmente, se realizará la simulación del proceso de acomodación humano, con
el fin de establecer una metodologı́a de estimación de las propiedades de material en
función de la edad, que no son cuantificables in vivo. Para ello, el paso previo será
la estimación de las fuerzas ciliares que ejerce el cuerpo ciliar sobre el cristalino en
un ojo joven no présbita, de edad 30 años, para el cual se conocen las propiedades
de material de los diversos tejidos. El proceso que se sigue se indica de forma
esquemática en la Figura 1.3.
1.4
Descripción de la tesis
Esta tesis consta de ocho capı́tulos, distribuidos como se describe a continuación.
El Capı́tulo 1 presenta la introducción a esta tesis, en la que se pretende centrar
Capı́tulo 1. Introducción
15
al lector en el entorno temático, las motivaciones que llevaron a su realización, los
principales objetivos que se pretenden alcanzar con la misma y el estado del arte
correspondiente a la biomecánica del ojo humano, en concreto de la córnea y del
cristalino, ası́ como del modelado de los tejidos implicados.
En el Capı́tulo 2 se presenta una descripción de la anatomı́a y fisiologı́a de los
órganos que componen el ojo humano. Se presta especial atención a los elementos
de mayor poder refractivo del ojo humano, la córnea y el cristalino, describiendo su
estructura y composición a nivel microestructural. Se expone el funcionamiento de
la óptica del ojo humano y sus anomalı́as. Finalmente, se presentan algunos equipos
para examen y diagnosis; algunos son frecuentes en la consulta oftalmológica y otros
se citan por estar relacionados con diversos aspectos de esta tesis.
En el Capı́tulo 3 se explican algunas técnicas quirúrgicas relacionadas con la
tesis que son utilizadas para corrección de ciertas anomalı́as refractivas del ojo
humano: cirugı́a incisional para corrección de astigmatismo, cirugı́a refractiva de
ablación corneal mediante láser excı́mer para corrección de la miopı́a, ası́ como los
tratamientos más recientes para patologı́as corneales ectásicas (queratocono): el
cross-linking del colágeno corneal y los implantes de segmentos intraestromales de
anillos corneales. La aportación de este capı́tulo es meramente descriptiva y pretende introducir al lector en la terminologı́a clı́nica y en los diversos tratamientos
que se reproducen posteriormente mediante simulación numérica.
En el Capı́tulo 4 se expone el modelo de comportamiento de material hiperelástico cuasi-incompresible anisótropo para el modelado del tejido corneal y escleral. Se considera en el modelo la dependencia con el tiempo del comportamiento
mecánico del tejido, introduciendo la viscoelasticidad en el modelo. Se presenta
la metodologı́a de adaptación del modelo de comportamiento hiperelástico cuasiincompresible anisótropo a la tipologı́a de membrana, es decir, el algoritmo que
permite el paso de la formulación tridimensional a dos dimensiones, para el posterior modelado del tejido capsular del cristalino humano. Se expone, además, la
metodologı́a utilizada para la introducción de las tensiones iniciales en el tejido, con
el fin de reproducir las condiciones fisiológicas del ojo humano in vivo previamente
a la simulación de los diversos tratamientos refractivos.
El Capı́tulo 5 describe la caracterización de las propiedades de material para
los tejidos considerados. Por una parte, se presentan los ensayos realizados: ensayos de tracción uniaxial con tejido corneal de cerdo sano, tejido escleral de cerdo
sano, tejido de cerdo sano con tratamiento de cross-linking de colágeno, y córnea
humana; ensayos de ciclos de relajación con córneas de cerdo sano, para determinar las propiedades de viscoelasticidad. Posteriormente se realiza el análisis de las
curvas tensión-deformación obtenidas para determinar los parámetros que caracterizan el material según el modelo de comportamiento utilizado, que se describe en
el siguiente capı́tulo.
El Capı́tulo 6 se presentan las simulaciones realizadas de diversos tratamientos
refractivos: cirugı́a incisional para la corrección del astigmatismo (incisiones curvas
16
Modelado del ojo humano y tratamientos refractivos
en córnea clara o arcuatas, y en el lı́mite corneo-escleral o limbares), cirugı́a refractiva de ablación con láser excı́mer para la corrección de la miopı́a, y tratamientos
para el queratocono: el cross-linking del colágeno corneal, el implante de segmentos
intraestromales y el tratamiento combinado de ambas técnicas. Posteriormente se
analizan los resultados obtenidos, desde los puntos de vista biomecánico y clı́nico. El
capı́tulo comienza por la descripción de distintos modelos geométricos de la córnea
humana y el desarrollo de los modelos de elementos finitos a partir de la geometrı́a
con los que se realizan posteriormente las simulaciones de cirugı́as y otros tratamientos. Se propone un primer modelo de aproximación a geometrı́a esférica para el
modelado de la córnea emétrope, un modelo de geometrı́a elipsoide basado en modelos ópticos generalizados, y una metodologı́a para el modelado personalizado, en
el cual la geometrı́a se desarrolla en base a la topografı́a y la paquimetrı́a tomadas
del paciente.
El Capı́tulo 7 está dedicado a la simulación de la función de acomodación del
cristalino humano, ası́ como al estudio de la patologı́a de la presbicia bajo la hipótesis
de estar causada únicamente por la modificación de las propiedades biomecánicas
del cristalino con la edad. Se comienza por el desarrollo de un modelo paramétrico
de cristalino humano, capaz de reproducir la geometrı́a en función de la edad y
del estado de acomodación. Dicho modelo se aplica para la estimación, mediante
simulación numérica, de las fuerzas ciliares que actúan durante el proceso de desacomodación. Posteriormente, bajo la hipótesis de la conservación del valor de dichas
fuerzas con la edad, se determina la pérdida de propiedades con la edad de los tejidos
internos del cristalino (córtex y núcleo).
Finalmente, en el Capı́tulo 8 se describen las conclusiones generales más importantes obtenidas a partir de los resultados de esta tesis y las aportaciones originales
de mayor relevancia. Se indican también los resultados de investigación presentados en forma de publicaciones, participaciones en congresos, premios obtenidos y
menciones en prensa.
Capı́tulo 2
Anatomı́a, fisiologı́a y óptica del
aparato ocular humano
El ojo humano es una compleja estructura responsable del sentido de la vista.
Consiste en un sistema óptico compuesto por un conjunto de órganos con cierto
poder refractivo que actúan como lentes, haciendo converger los rayos de luz procedentes del exterior en la retina, donde se forma la imagen óptica. Este estı́mulo
visual se transforma en impulsos electroquı́micos que son transportados mediante el
nervio óptico hasta el cerebro, donde son procesados. De esta forma, el ser humano
es capaz de percibir distancias, colores, movimientos y formas.
Esta tesis tiene por objeto el modelado del ojo humano y la simulación de distintos tratamientos refractivos. Para ello, es fundamental conocer la anatomı́a de
este complejo aparato, ası́ como las bases ópticas de la visión humana (fenómeno
de refracción). En este capı́tulo se realiza una revisión de todas estas cuestiones.
Asimismo, se presentan los principales equipos para la medida y diagnosis de defectos refractivos y de patologı́as asociadas. Finalmente, se exponen los fundamentos
de la óptica geométrica (método de trazado de rayos), que, posteriormente, será
utilizado en el Capı́tulo 6 para el análisis óptico de los resultados obtenidos tras la
simulación numérica de distintas cirugı́as refractivas.
2.1
Anatomı́a del aparato ocular
En este apartado se exponen las partes que componen el ojo humano. Se
comienza por describir brevemente su proceso de formación. A continuación se
describe la órbita, que es la cavidad ósea que aloja al globo ocular. Se presenta una
descripción detallada de la anatomı́a del globo ocular haciendo especial hincapié
en los medios refractivos (córnea, humor acuoso, cristalino y humor vı́treo), que
son aquellos por los que se propagan los rayos de luz hasta alcanzar la retina, por
ser los abordados en esta tesis. Finalmente, se expone brevemente la constitución
anatómica de los órganos anexos, entre ellos, los músculos oculares que le confieren
movilidad y los órganos protectores del globo ocular, como el aparato lagrimal o los
párpados.
17
Modelado del ojo humano y tratamientos refractivos
18
Figura 2.1: Planos anatómicos: coronal (amarillo), sagital (violeta) y transversal
(verde) .
Antes de proceder a la descripción de la anatomı́a del aparato ocular, se definen
los planos anatómicos (Figura 2.1). Consisten en tres tipos de planos coordenados
que se utilizan en la descripción anatómica del cuerpo humano o de las partes que
lo componen:
• Planos coronales o frontales: se orientan de manera vertical, creando una
división en dos partes, anterior y posterior.
• Planos sagitales: al igual que los anteriores se orientan verticalmente y son perpendiculares a los planos coronales. Dividen en dos zonas, derecha e izquierda.
• Planos transversales, horizontales o axiales: como su nombre indica se orientan horizontalmente, a diferencia de los dos anteriores. Dividen en las zonas
inferior y superior.
En este capı́tulo y posteriores se refieren, frecuentemente, cortes u orientaciones
determinadas por los planos anatómicos indicados.
2.1.1
Formación del globo ocular
La formación del globo ocular tiene lugar durante la gestación del feto. Varias
etapas conforman este proceso, entre ellas, las más significativas son:
1. A las cuatro semanas de gestación (embrión de 6 mm y 0,5 g aprox.) ya se
destacan las vesı́culas que darán lugar a los ojos.
2. A las cinco semanas (embrión de 14 mm aprox.), los ojos comienzan a perfilarse.
Capı́tulo 2. Anatomı́a, fisiologı́a y óptica del aparato ocular humano
(a)
19
(b)
Figura 2.2: Formación del globo ocular. (a) Vista general del feto a los tres meses
de gestación. (b) Detalle de la cabeza de un feto de tres meses [Laguna, 2000].
3. En el segundo mes de embarazo (feto de 4 cm y 5 g aprox.), los ojos ya empiezan
a perfilarse, aunque no son más que unos pequeños huecos en el cráneo.
4. En el quinto mes de embarazo (feto de 25 cm y 250 g aprox.), aparecen las
cejas y las pestañas, que empiezan a cubrirse de un incipiente lanugo o vello.
5. En el séptimo mes (feto de 35 cm y 1.200 g aproximadamente), ya es capaz
de abrir y cerrar los ojos puesto que los globos oculares están perfectamente
formados y en disposición de cumplir sus funciones. Además es capaz de
percibir la luz como un débil resplandor rojizo.
6. En el noveno mes (feto entre 45 y 50 cm y 2.500/3.200 g aprox.) el proceso
de formación anatómica del ojo ha concluido y el dispositivo visual está completamente desarrollado, a excepción de la parte más importante de la retina,
que acaba su desarrollo a finales del primer año de vida.
En la Figura 2.2, tomada a los tres meses de gestación, puede observarse la
formación de los párpados, sobre el cristalino de los ojos, que a lo largo de los
próximos dı́as adquirirán su forma ovalada. Los párpados superior e inferior están
unidos y cerrados, y no se abrirán hasta el séptimo mes de embarazo.
En el recién nacido es caracterı́stico el color del iris, que suele ser de un gris
azulado, hasta alcanzar su coloración definitiva unos meses después [Laguna, 2000].
Modelado del ojo humano y tratamientos refractivos
20
(a)
(b)
Figura 2.3: Huesos de la órbita. (a) Corte sagital de los huesos que componen la
cavidad orbital [Loayza, 1996]. (b) 1. Órbita y su entorno: 2. Lagrimal 3. Maxilar
superior 4. Malar 5. Maxilar inferior 6. Nasal 7. Arco superciliar 8. Frontal 9.
Lámina orbitaria del etmoides [Laguna, 2000].
2.1.2
La órbita
Las órbitas son unas cavidades óseas, anchas y profundas, situadas simétricamente
a ambos lados de la raı́z de la nariz, entre el compartimento anterior de la base del
cráneo y el macizo facial superior. En cada órbita se encuentra alojado el globo
ocular y sus anexos. La órbita actúa como protector del globo ocular.
Cada órbita puede compararse con una pirámide cuadrangular de caras cóncavas
y ángulos redondeados. Su eje no es sagital, sino oblicuo hacia atrás y adentro
en dirección al dorso de la silla turca. En cuanto a sus dimensiones, tiene una
profundidad de 45 a 50 mm, mientras que la altura es de 35 mm y la anchura de 40
mm en la parte anterior.
El globo ocular se encuentra muy adaptado a la órbita y sólo ocupa su parte
anterior ensanchada, en tanto que los vasos, los músculos y los nervios están situados
en la celda posterior que se estrecha de adelante hacia atrás.
La Figura 2.3 muestra algunos huesos del entorno orbital. En concreto, los
que forman parte de la la órbita son siete: frontal, esfenoides, maxilar, lagrimal,
etmoides, zigomático y palatino [Laguna, 2000; Küchle and Busse, 1982].
2.1.3
El globo ocular
El globo ocular es la parte principal del aparato de la visión. Se encuentra alojado en la órbita y posee una forma aproximadamente esférica, o más exactamente,
forma ovoide, cuyo eje mayor es el sagital. La Figura 2.4 muestra detalladamente
Capı́tulo 2. Anatomı́a, fisiologı́a y óptica del aparato ocular humano
21
Figura 2.4: Estructura del ojo vista desde arriba. Se muestran el ojo y parte del
párpado inferior izquierdos, en un corte horizontal para mostrar su estructura interna. Imagen de Anatomı́a de Grey [Williams and Bannister, 1998]
22
Modelado del ojo humano y tratamientos refractivos
Figura 2.5: Corte transversal en el que se representan el eje ocular y el orbitario,
que forman un ángulo de 20o [Küchle and Busse, 1982].
la anatomı́a de este aparato.
La situación del polo anterior del ojo es tangente a una lı́nea recta que une los
rebordes orbitarios superior e inferior, pero desborda, sobre todo hacia afuera, la
lı́nea que une los rebordes orbitarios interno y externo. Por este motivo el globo
ocular se halla menos protegido en su porción externa. Por otra parte, el ojo no
está en contacto con las paredes de la órbita sino que está separado de ellas por una
distancia aproximadamente de seis milı́metros hacia afuera y de once milı́metros
hacia adentro, es decir, que se encuentra más cerca de la pared externa que de la
interna. El eje anteroposterior del ojo, sensiblemente sagital, no coincide con el eje
correspondiente a la órbita, oblicuo hacia abajo y afuera. El encuentro de ambos
ejes, ocular y orbitario, forma un ángulo de alrededor de 20o (Figura 2.5).
Aunque las dimensiones del globo ocular varı́an entre personas, por lo general el
ojo emétrope, es decir, sin errores de refracción, tiene un diámetro sagital de entre
24 y 25 mm; el diámetro transversal es de 23,5 mm y el vertical de 23 mm. En los
casos en que el diámetro sagital no tiene una medida apropiada, aparecen problemas
de ametropı́a, es decir, ciertos defectos refractivos de visión, que se comentarán más
adelante. El peso del globo ocular es de 7 g aproximadamente y su volumen de unos
6,5 cm3 . El globo está sometido a la tensión que originan las estructuras internas
(humor acuoso y vı́treo) denominada presión intraocular (PIO), de gran relevancia
en muchas patologı́as. Su valor se determina mediante tonometrı́a [Rodriguez et al.,
1994], procedimiento que se muestra en el apartado 2.3.1.
El globo ocular se compone de diversos tejidos. La capa externa o fibrosa del
Capı́tulo 2. Anatomı́a, fisiologı́a y óptica del aparato ocular humano
23
globo ocular es una estructura resistente que envuelve todos los componentes internos; es transparente en el segmento anterior, donde se encuentra la córnea, y opaca
en el resto del globo, formado por la membrana esclerótica o esclera. La capa media
o vascular, está formada por la úvea posterior o coroides, membrana muy vascularizada que aporta nutrientes a otros tejidos, y por la úvea anterior, compuesta
por el cuerpo ciliar y el iris. La capa interna es la capa más profunda y recubre
parcialmente el interior de la capa externa. El órgano que constituye la capa interna
es la retina, en la cual se realiza el proceso de visión ya que es donde se encuentra
el tejido neuroepitelial, que forma parte del sistema nervioso central. La retina está
conectada con el cerebro por medio del nervio óptico.
En el interior del globo ocular se distinguen tres cámaras: la cámara anterior,
la cámara posterior y la cámara vı́trea. La cámara anterior es la zona comprendida
entre la superficie posterior corneal y el iris. Esta cavidad se encuentra ocupada por
un lı́quido transparente llamado humor acuoso. La cámara posterior está delimitada
anteriormente por el iris y posteriormente por el cristalino, y también contiene humor
acuoso. La profundidad de cámara anterior o ACD (Anterior Chamber Depth) es
la distancia axial entre el endotelio corneal y la superficie anterior del cristalino.
La cámara vı́trea es la cavidad existente entre el cristalino y la retina, y en su
interior se encuentra un gel transparente y avascular llamado humor vı́treo o cuerpo
vı́treo. El cristalino, que es la estructura que separa la cámara posterior de la vı́trea,
se encuentra suspendido en el interior del globo mediante el ligamento suspensorio
del cristalino, también conocido como zónula de Zinn, zonula ciliaris o zónula, al
cuerpo ciliar, que se encuentra en la pared interna del globo y está constituido por dos
partes bien diferenciadas: los procesos ciliares y el músculo ciliar. Las estructuras
del interior del globo ocular pueden observarse en la Figura 2.4.
Las estructuras refringentes presentes en el globo ocular, es decir, los medios
que atraviesa la luz hasta alcanzar la retina, son la córnea, el humor acuoso, el
cristalino y el cuerpo vı́treo. De ellos, la córnea y el cristalino son los de mayor
poder refringente y por lo tanto, objeto de esta tesis. De las aproximadamente 59
dioptrı́as (D) que tiene el ojo humano en visión lejana, la córnea representa un 70%,
con una potencia óptica de unas 43 D. El cristalino, en estado acomodado (visión
cercana), tiene 30 D y en estado desacomodado (visión lejana), 15 D [Richards,
2005]. Los humores acuoso y vı́treo son también medios refringentes; sin embargo,
en ausencia de patologı́as de vı́treo no modifican la refracción del ojo, determinada
por la córnea y el cristalino.
A continuación se describen todas estas estructuras, comenzando por los medios
refringentes: córnea, humor acuoso, cristalino y humor vı́treo. Posteriormente, se
describen los demás componentes del ojo: esclera, que junto con la córnea forma la
capa externa; úvea posterior o coroides, y cuerpo ciliar e iris, constituyendo la capa
media; y la retina, capa interna del globo ocular.
Modelado del ojo humano y tratamientos refractivos
24
Figura 2.6: Imagen esquemática de la microestructura de una sección corneal. Se
pueden apreciar las cinco capas que la componen: epitelio, membrana de Bowman,
estromal, membrana de Descemet y endotelio.
2.1.3.1 Córnea
La córnea es una membrana transparente y de curvatura regular que actúa como
una lente convergente. Su potencia óptica de aproximadamente 43 D la convierte
en la componente refringente más importante del ojo. Además, tiene la función de
proteger la superficie anterior del ojo frente a traumatismos y frente a la penetración
de cuerpos extraños.
La córnea se sitúa por delante de la esclerótica, formando con ésta un resalte en
la zona de transición, que recibe el nombre de limbo esclero-corneal. En el seno de
este tejido, se halla excavado un canal circunferencial sin pared propia, denominado
conducto de Schlemm o seno venoso de la esclerótica (Figura 2.4). Está localizado
en el ángulo iridocorneal de la cámara anterior del ojo y tiene un importante papel
en la regulación de la PIO, ya que por este conducto drena el humor acuoso hacia la
circulación sanguı́nea [Young and Heath, 2000]. En la periferia de la córnea existen
vasos sanguı́neos y linfáticos y un plexo nervioso, cuyas ramificaciones se extienden
por toda ella.
El diámetro corneal mide entre 11 y 12 mm, y el espesor varı́a en función de
la distancia al ápex o punto central, siendo aproximadamente 550 µm en el ápex,
aumentando hasta las 650 µm en la periferia. Su forma no es exactamente circular
sino elı́ptica, siendo generalmente más alargado en el eje nasal-temporal que en el
superior-inferior. En el Capı́tulo 6.1 se desarrollan modelos geométricos que modelan
la morfologı́a corneal, por lo que ésta se expone con mayor detalle.
A nivel histológico, la córnea está formada por cinco capas, como puede apreciarse en la Figura 2.6. Las cinco capas corneales, de la más externa a la más interna,
son las siguientes:
• Epitelio corneal. Sirve a la córnea de protección externa. Se trata de una
capa de epitelio pavimentoso poliestratificado, situado en la cara anterior de
la córnea. Está fijada firmemente a la capa inmediatamente inferior, conocida
Capı́tulo 2. Anatomı́a, fisiologı́a y óptica del aparato ocular humano
(a)
25
(b)
Figura 2.7: (a) Lamelas que componen el estroma corneal [Pinsky et al., 2005]. En
cada lamela, las fibras de colágeno transcurren paralelas, embebidas en una matriz
extrafibrilar y unidas entre sı́ por proteoglicanos. La dirección de las fibras en cada
lamela se indica según el vector A. (b) Aumento ×6.200 de la superficie de colágeno
corneal (imagen de Komai and Ushiki [1991a] en Studer et al. [2010]). La flecha roja
indica los enlaces cruzados entre fibras adyacentes.
como la membrana de Bowman, por medio de una membrana basal continua.
• Membrana de Bowman. Esta membrana se sitúa entre el epitelio y el estroma.
Está constituida por fibrillas de colágeno, y su grosor oscila entre 8 y 14 µm.
Su terminación en la periferia corneal marca el borde anterior del limbo esclerocorneal.
• Estroma. El estroma constituye la estructura principal de la córnea, puesto
que representa el 90% del espesor total de la misma. Es un tejido duro y
transparente. Está formado por una matriz de sustancia fundamental en la que
se encuentran embebidas gran cantidad de fibrillas de colágeno, que le confieren
a la córnea la mayor parte de su rigidez [Pinsky and Datye, 1991]. Las fibras de
colágeno se agrupan en capas denominadas lamelas. En cada lamela, las fibras
transcurren paralelas entre sı́, embebidas en una matriz extrafibrilar y unidas
por proteoglicanos; las lamelas se disponen siguiendo distintas orientaciones
[Pinsky et al., 2005]. La Figura 2.7 muestra esquemáticamente la estructura
lamelar del estroma corneal.
Las dos orientaciones preferentes de las fibras de colágeno en el estroma de
la córnea central son horizontal (nasal-temporal) y vertical (superior-inferior),
modificándose hacia la periferia, donde adquieren una dirección preferentemente circunferencial. Estas orientaciones preferenciales han sido determinadas recientemente por el equipo de R.H. Newton y K.M. Meek, mediante
26
Modelado del ojo humano y tratamientos refractivos
Figura 2.8: Distribución preferente de las fibras de colágeno en el estroma de una
córnea sana [Hayes et al., 2007b]. Izquierda: La lı́nea verde representa un área
central de 8 mm de diámetro. El área anular en rojo representa el limbo, rodeado de
un anillo de esclera. Derecha: Distribución de vectores obtenida mediante rayos X,
que representa las orientaciones preferentes de las fibras de colágeno en el estroma
corneal: vertical (superior-inferior) y horizontal (nasal-temporal) en el área central;
circunferencial en la periferia.
la medida de la dispersión que causan las fibras de colágeno ante la irradiación de rayos X [Aghamohammadzadeh et al., 2004; Boote et al., 2005; Hayes
et al., 2007b; Meek and Boote, 2009]. La Figura 2.8, obtenida por Hayes et al.
[2007b], muestra en la imagen izquierda un área central en forma de diamante,
causada por la superposición de las dos orientaciones preferentes de las fibras
de colágeno, horizontal (nasal-temporal) y vertical (superior-inferior). En este
área, la cantidad de colágeno orientado de forma preferencial permanece constante en una zona central de 5 mm, incrementándose en cada uno de los cuatro
cuadrantes; la distribución adopta una forma de diamante caracterı́stica de una
córnea humana sana.
La imagen derecha de la Figura 2.8 muestra el mapa vectorial correspondiente,
en el cual los vectores indican la dirección preferente de las fibras de colágeno
en cada punto. La zona central muestra vectores ortogonales entre sı́, según
las dos direcciones citadas, horizontal y vertical. En la periferia corneal, que
es la zona correspondiente al limbo corneo-escleral, los vectores se disponen
de forma circunferencial. Esta distribución de las fibras confiere un comportamiento localmente ortótropo al tejido corneal.
• Membrana de Descemet. También conocida como lámina elástica posterior, es
una estructura acelular situada entre el endotelio y el estroma de la córnea.
Posee un grosor de entre 10 y 15 µm y está compuesta principalmente por
fibras de colágeno, lo que le confiere una gran elasticidad y resistencia.
• Endotelio corneal. El endotelio consiste en una capa de epitelio pavimentoso
Capı́tulo 2. Anatomı́a, fisiologı́a y óptica del aparato ocular humano
27
no estratificado que recubre la totalidad de la cara posterior de la córnea. Esta
membrana cumple la función de impermeabilización hacia el interior, evitando
de este modo la entrada de agentes al interior del globo ocular. Además,
es el agente encargado de la aportación de nutrientes al interior del tejido
corneal, que es un tejido no vascularizado [Laguna, 2000; Perkins and Hill,
1981; Bouchet and Cuilleret, 1979].
2.1.3.2 Humor acuoso
El humor acuoso es un lı́quido alcalino, transparente y fluı́do que ocupa las
cámaras anterior y posterior del ojo. La cámara anterior se encuentra entre la córnea
y el iris, y la cámara posterior, entre el iris y el cristalino; ambas se comunican por
la pupila, que es el orificio circular delimitado por el iris. El humor acuoso es
la principal fuente de oxı́geno y nutrientes para el cristalino. Además también se
encarga, junto a la lágrima, de nutrir a la córnea.
El humor acuoso es segregado por los procesos ciliares (apartado 2.1.3), que se
encuentran en la cámara posterior. El humor acuoso circula continuamente desde
la cámara posterior a la anterior, según se indica en la Figura 2.4. Posteriormente
pasa al conducto de Schlemm, el cual lo evacúa hacia las venas escleroticales. Del
equilibrio entre la formación y drenaje del humor acuoso depende el mantenimiento de una presión intraocular adecuada (en torno a 15 mmHg) para mantener la
estructura y funcionalidad del ojo. Un exceso de formación de humor acuoso o,
más frecuentemente, la obstrucción de su drenaje, ocasionan un aumento de la PIO,
pudiendo desencadenar la patologı́a denominada glaucoma.
2.1.3.3 Cristalino
El cristalino es una estructura densa, flexible y en constante desarrollo. Al
igual que sucede con la córnea, el cristalino tiene dos propiedades ópticas esenciales:
transparencia y poder de refracción. El cristalino es una lente biconvexa, cuyas
superficies anterior y posterior son aproximadamente parabólicas. El diámetro ecuatorial está en torno a 10 mm, aunque varı́a con la edad y el estado de acomodación.
El espesor máximo, entre el polo anterior y el posterior, es de 3,5 mm a 5 mm.
La superficie posterior tiene mayor curvatura que la anterior en todos los estados
de acomodación: en el estado totalmente acomodado (visión de objetos cercanos)
alcanza las máximas curvaturas anterior y posterior, mientras que en el estado no
acomodado (visión de objetos lejanos), ambas curvaturas son mı́nimas. El espesor
sagital y las curvaturas de las superficies en el estado no acomodado aumentan con
la edad. En el Capı́tulo 7 se presenta con mayor detalle la geometrı́a del cristalino,
la cual viene determinada por la edad y por el estado de acomodación.
El ligamento suspensorio del cristalino, también denominado zonula ciliaris,
zónula de Zinn, o simplemente, zónulas, son unas fibras que se encuentran insertadas en la cápsula del cristalino, a ambos lados del ecuador. Mediante las zónulas,
28
Modelado del ojo humano y tratamientos refractivos
Figura 2.9: Detalle de la región zonular y cuerpo ciliar [Gray, 1858].
el cristalino está suspendido radialmente al cuerpo ciliar, que lo rodea formando un
anillo adherido a la pared interna del globo. El cuerpo ciliar está constituido por
dos partes bien diferenciadas, los procesos ciliares, en los cuales se genera el humor
acuoso, y el músculo ciliar, agente responsable del proceso de acomodación. Todas
estas estructuras pueden observarse en la Figura 2.9.
El músculo ciliar es un esfı́nter. Su contracción hace que el espacio que rodea
al cristalino se cierre, modificando la geometrı́a del cristalino y arrastrándolo mediante las zónulas en la dirección del eje visual, aproximándose a la córnea. Este
proceso induce un cambio morfológico y refractivo en el cristalino y, por tanto, en la
potencia óptica total del ojo. La modificación dióptrica del cristalino para lograr el
enfoque de objetos cercanos se denomina mecanismo de acomodación o simplemente
acomodación.
A nivel histológico, en el cristalino se distinguen tres tipos diferentes de células: la
cápsula, el epitelio y las fibras del cristalino, dando lugar a partes bien diferenciadas:
cápsula, epitelio, córtex y núcleo. Todas estas estructuras aparecen representadas
en la Figura 2.10, y se exponen a continuación.
• Cápsula. El saco capsular o cápsula envuelve las estructuras del cristalino. El
tejido capsular tiene propiedades elásticas [Krag et al., 1997; Pedrigi et al.,
2007]. Presenta una estructura laminar, en la que cada capa está formada
Capı́tulo 2. Anatomı́a, fisiologı́a y óptica del aparato ocular humano
29
Figura 2.10: Partes del cristalino [Stafford, 2001].
por láminas de diminutas fibras de colágeno paralelas entre sı́. El principal
componente de la cápsula es una membrana basal de colágeno tipo IV, el cual
se organiza en el espacio formando redes moleculares en tres dimensiones. La
capa más externa de la cápsula contiene una mezcla de filamentos de colágeno
de la cápsula y microfibras elásticas de la zónula. Estas fibras se unen tangencialmente a la superficie capsular, y la mayorı́a de ellas penetran una mı́nima
distancia en el interior de la cápsula.
La cápsula del cristalino humano tiene un considerable espesor incluso en el
momento del nacimiento, aproximadamente de 4 µm en la zona anterior y
ecuatorial de la cápsula, disminuyendo sensiblemente hasta 3,5 µm en la zona
posterior. Ası́ como el volumen del cristalino aumenta con la edad, la cápsula
también lo hace, tanto en tamaño como en espesor. Este crecimiento de espesor
se realiza mediante la deposición de nuevas lamelas, bien en el interior de las
lamelas existentes o bien en la superficie más interna de la cápsula, empujando
hacia el exterior a las ya existentes [Krag and Andreassen, 2003a].
A pesar de que el colágeno tipo IV presenta una organización espacial en
forma de estructura tridimensional, se aprecia una predisposición direccional
de las fibras con la edad. Ensayos de inflado realizados sobre muestras de
cápsulas sugieren una disposición circular de las fibras en el interior de cada
una de las láminas que forman la cápsula, de manera que éstas se orientan
Modelado del ojo humano y tratamientos refractivos
30
(a)
(b)
Figura 2.11: Micrografı́as del cristalino [Stafford, 2001]. (a) Zona superficial del
cristalino cercana al ecuador anterior; se puede apreciar claramente la cápsula, el
epitelio y las capas de fibras del córtex. (b) Ecuador del cristalino. La imagen
muestra el desarrollo de las nuevas fibras.
formando circunferencias concéntricas cuyo centro está situado en el eje sagital
del cristalino, es decir, en el eje que une los polos anterior y posterior [Pedrigi
et al., 2007].
• Epitelio. El epitelio del cristalino procede de la transformación de las células
de la vesı́cula ocular. En un ojo desarrollado, forma una capa uniforme bajo
la cápsula anterior y ecuatorial, como se puede observar en la Figura 2.11 (a).
Salvo en el ecuador, donde se produce un alargamiento, las células tienen forma
hexagonal en plano y cúbica en sección. Además, las células vecinas tienen
interconexiones unas con otras que no sólo cumplen la función de mantener
unida toda la membrana, sino que además sirven como un excelente medio
de comunicación. Estas interconexiones están relacionadas con el proceso de
producción de enzimas y con el funcionamiento de las bombas activas, como
la bomba de sodio.
Las células del epitelio desempeñan un papel relevante en el proceso de fabricación de nuevas fibras. La sı́ntesis de las proteı́nas del cristalino y de la membrana y el transporte a través de las bombas activas de iones y de agua son
sólo dos de las numerosas tareas que realiza. Además, estas células epiteliales
son ricas en orgánulos citoplasmáticos. El transporte que realiza el epitelio intercambiando iones con el interior del cristalino es fundamental para el
abastecimiento de nutrientes a tejidos no vascularizados y cuya transparencia
es fundamental.
• Fibras del cristalino. Dentro del conjunto de fibras que forman el cristalino
se pueden distinguir dos grupos principales. Por un lado, las pertenecientes
Capı́tulo 2. Anatomı́a, fisiologı́a y óptica del aparato ocular humano
(a)
31
(b)
Figura 2.12: (a) Micrografı́a de la sutura en el centro del cristalino. (b) Disposición
de las fibras corticales en los polos del cristalino, formando suturas con forma caracterı́stica de Y [Kuszak et al., 2004].
al núcleo del cristalino, formado durante la primera parte del periodo de
gestación. Por otro lado, las pertenecientes al córtex, que se forman posteriormente.
Las fibras del cristalino se forman a partir de las células de la membrana
epitelial, las cuales sufren modificaciones en su histologı́a para poder cumplir
la función de sı́ntesis de fibras cristalinas, es decir, han de perder el núcleo
celular y la mayorı́a de sus orgánulos, alargándose hasta adquirir la apariencia
de una fibra. Las nuevas fibras, al formarse, son empujadas bajo el epitelio,
sobre la última familia de fibras generada (Figura 2.11 (b)).
La mayor parte del volumen del cristalino está compuesto de estas fibras. El
núcleo contiene las fibras del cristalino embrionario, también llamadas fibras
primarias, rodeado de las fibras secundarias del cristalino fetal. Éstas, a su
vez, se hallan rodeadas de las fibras postnatales y adultas del núcleo. Estas
fibras y más adelante las del resto del córtex, se unen formando suturas cada
vez más complejas. En el córtex, las fibras se disponen formando una sutura
en forma de Y tanto en la parte anterior como en la posterior, tal y como se
muestra en la Figura 2.12 [Kuszak et al., 2004].
Las fibras del córtex presentan una forma homogénea, son delgadas, de sección
aproximadamente hexagonal y muy alargadas. Poseen una forma ligeramente
fusiforme, siendo más amplia y gruesa la sección en el ecuador que en los
extremos. En las capas profundas del córtex, las membranas están tan altamente interconectadas y las fibras se han estrechado tanto en sección, que su
forma hexagonal se ha difuminado de forma que no es tan apreciable como en
las capas superiores. La Figura 2.13 muestra fibras hexagonales de las capas
Modelado del ojo humano y tratamientos refractivos
32
(a)
(b)
Figura 2.13: Micrografı́as de la morfologı́a en sección de las fibras que forman el
córtex [Glasser and Kaufman, 1999]. (a) Fibras corticales. La forma hexagonal de
las células es inapreciable. (b) Sección del córtex. Las fibras están uniformemente
distribuidas y mantienen su sección hexagonal.
superiores del córtex y del núcleo, que presentan una morfologı́a mucho más
difusa. En el núcleo, a pesar de estar impedidas por las capas superiores, las
fibras tienden a ser más gruesas.
2.1.3.4 Humor vı́treo
El humor vı́treo o cuerpo vı́treo es una sustancia gelatinosa e incolora que ocupa
la cavidad posterior del globo ocular, entre la cara posterior del cristalino y la
retina. Representa el 80% del volumen del globo ocular. Funcionalmente el vı́treo
colabora en el mantenimiento de la forma esférica del ojo, contribuye a la fijación de
la retina sobre la coroides, evitando posibles desprendimientos de la retina; además
desempeña un papel refractivo gracias a su transparencia, al servir de medio de
transmisión de la luz entre el cristalino y la retina. Externamente tiene una mayor
consistencia, formando la membrana hialoidea. En la parte anterior, el cuerpo vı́treo
está excavado para permitir el apoyo de la superficie posterior del cristalino sobre
lo que se conoce como fosa lenticular. Desde la papila hasta el cristalino, el vı́treo
está atravesado por el conducto hialoideo de Cloquet, resto embrionario de la arteria
hialoidea que nutrı́a el cristalino [Laguna, 2000; Rodriguez et al., 1994; Perkins and
Hill, 1981].
2.1.3.5 Esclera
La esclera, o membrana esclerótica, constituye las tres cuartas partes de la capa
externa del globo ocular. Es de color blanquecino y está formada por haces conjuntivos con fibras elásticas de colágeno muy resistentes, que confieren al globo ocular
su consistencia. El grosor escleral medio es de 0,53 mm en el limbo esclerocorneal,
Capı́tulo 2. Anatomı́a, fisiologı́a y óptica del aparato ocular humano
33
Figura 2.14: Imagen de los haces de colágeno en la esclera. Las fibrillas de colágeno
se disponen de manera ondulada y se mezclan con los haces individuales, indicados
por las flechas (en Kretschmann et al. [2003] de Komai and Ushiki [1991a]).
mientras que disminuye de forma significativa hasta 0,39 mm en las cercanı́as del
ecuador y aumenta hasta 1 mm en las proximidades del nervio óptico [Kretschmann
et al., 2003]. Esta membrana ejerce como “cápsula” protectora del ojo.
En la parte externa de la esclera se hallan las inserciones de los músculos motores
del globo ocular. En su periferia, está recubierta por la cápsula de Tenon o cápsula
vaginal del bulbo ocular. A su vez, la esclera está formada por tres capas de tejido
bien diferenciadas, entre las que se encuentran:
• La episclera es una capa de tejido conjuntivo situada en la parte más superficial
de la membrana esclerótica. Su cometido principal es el de proporcionar el
suministro nutritivo al resto del globo ocular. Es permeable al agua, la glucosa
y las proteı́nas. Su grosor en comparación con el total de la membrana es
considerable y está atravesada por gran cantidad de vasos sanguı́neos.
• El estroma escleral es la más gruesa de las tres y realiza principalmente una
función de protección. Las fibrillas de colágeno forman haces que no son
paralelos sino que se disponen en haces individuales de ovillos (Figura 2.14).
Estos haces tienen una anchura y un grosor variables, con ramificaciones que
se mezclan entre sı́. Esta distribución de fibras confiere un comportamiento al
tejido escleral que se puede considerar isótropo.
• La lámina fusca está formada por una capa fibrosa de color marrón compuesta
de pequeñas fibras de colágeno. Se encuentra situada en la parte posterior y
es atravesada por un gran número de perforaciones que permiten el paso de
los filetes del nervio óptico y los vasos centrales de la retina.
La esclera, en la parte posterior, se encuentra perforada por diversos orificios que
permiten el paso del nervio óptico, venas y arterias (Figura 2.4), mientras que en
34
Modelado del ojo humano y tratamientos refractivos
la parte anterior se encuentra alojada la córnea, también de naturaleza fibrosa pero
transparente [Bouchet and Cuilleret, 1979].
2.1.3.6 Coroides
La coroides o úvea posterior está situada entre la retina y la esclerótica, y llega
por delante hasta el cuerpo ciliar. Es una membrana conjuntiva muy rica en vasos
(fuente de nutrición y reservorio del ojo), que reviste el globo ocular por dentro. La
coroides está constituida por cuatro capas: epicoroides, capa vascular, coriocapilar
y membrana de Bruch. Es de apariencia negra y brillante, debido a las células
pigmentadas que contiene y que actúan como pantalla ante la luz. La función
principal de la coroides es el aporte sanguı́neo a las capas más externas de la retina.
[Laguna, 2000].
2.1.3.7 Cuerpo ciliar
Pertenece a la úvea anterior, en la capa media del globo ocular. Se extiende desde
la parte anterior de la retina (ora serrata) hasta la base del iris, inmediatamente
detrás de la unión de la esclera con la córnea. El cuerpo ciliar está constituido por
dos partes bien diferenciadas: el músculo ciliar, agente responsable del proceso de
acomodación y la porción epitelial.
El músculo ciliar es un reborde formado por fibras lisas dispuestas longitudinal
y anularmente, que se insertan en el borde anterior de la esclerótica. Su contracción
produce relajación del ligamento suspensorio del cristalino, desencadenando el proceso de acomodación (ver apartado 2.2.3).
La porción epitelial consta de la capa epitelial pigmentaria externa, que continúa
por detrás con el epitelio pigmentario retiniano, y la capa epitelial interna, no pigmentada, constituyendo los procesos ciliares. Son entre 70 y 80 delgados pliegues de
capa epitelial que emergen de la cara interna del cuerpo ciliar y se disponen radialmente alrededor del cristalino. Su misión es segregar el humor acuoso en la cámara
posterior [Laguna, 2000].
2.1.3.8 Iris
El iris, junto al cuerpo ciliar, constituyen la úvea anterior de la capa media
del globo ocular. Es un diafragma circular ubicado en un plano frontal que regula
la penetración de la luz en el globo ocular. Tiene un espesor de 0.3 milı́metros
y un diámetro de 12 milı́metros. Su forma es ligeramente cóncava hacia atrás y se
encuentra atravesado por un orificio central: la pupila. Su circunferencia se continúa
con el cuerpo ciliar a nivel del limbo. Si la luz es intensa y durante la visión cercana
disminuye el diámetro de la pupila, lo que se conoce como miosis. Por contra, si la
luz es débil y durante la visión lejana la pupila se agranda (migrasis). El estado de
dilatación intermedia de la pupila es de 3 a 4 milı́metros.
Capı́tulo 2. Anatomı́a, fisiologı́a y óptica del aparato ocular humano
35
Presenta dos caras bien diferenciadas: la anterior es brillante y se encuentra
limitada en la periferia por un anillo coloreado externo y en el centro por el anillo
pupilar. En la unión de su tercio interno con los dos tercios externos se advierte una
lı́nea quebrada, el collar, que corresponde al lı́mite de reabsorción de la membrana
pupilar que cierra la pupila del feto hasta el final de séptimo mes. El aspecto del iris
es fibrilar, con sus saliencias radiales y sus deshicencias o criptas. En ciertos casos
el iris está desprovisto de pigmentos y su estructura radial es bien visible, resultante
de color azul claro, mientras que en otros está cargado de pigmento y la estructura
no es visible, entonces aparece liso y de color oscuro. Por otro lado, la cara posterior
es de color negro y está aplicada contra la cara anterior del cristalino [Küchle and
Busse, 1982].
2.1.3.9 Retina
La retina constituye la capa interna del globo ocular. Consiste en una fina
cutı́cula transparente, con un alto consumo de oxı́geno. En su cara externa, está
protegida por una capa pigmentaria parduzca y opaca. Está compuesta de dos
unidades funcionales:
• Epitelio pigmentario retiniano externo, es una capa simple de células hexagonales. En la ora serrata, porción más anterior y periférica de la retina, el
epitelio pigmentario retiniano entra en contacto con el epitelio pigmentario del
cuerpo ciliar.
• Retina sensorial interna, es una hoja delicada de tejido transparente que varı́a
de espesor entre 0,4 milı́metros cerca del nervio óptico y unos 0,15 milı́metros
por delante de la ora serrata.
Dentro de estas unidades funcionales se distinguen diez capas, que pueden observarse en la Figura 2.15:
1. Epitelio pigmentario, formado por células cúbicas que contienen un pigmento
ferroso llamado fuscina.
2. Células fotorreceptoras, entre las que se encuentra los conos y los bastones.
3. Membrana limitante externa, formada por las células de Müller.
4. Nuclear externa, que contiene los cuerpos celulares de los conos y bastones
encargados de transformar la energı́a luminosa en impulsos nerviosos.
5. Plexiforme externa, que comprende las articulaciones de las células visuales
con las bipolares.
6. Nuclear interna, que contiene las células bipolares junto con células amacrinas,
células de unión horizontal.
36
Modelado del ojo humano y tratamientos refractivos
Figura 2.15: Micrografı́a de la retina (Universidad de Virginia, 2005). Se distinguen
con claridad las diez capas que la componen: 1. Epitelio pigmentario. 2. Células fotorreceptoras. 3. Membrana limitante externa. 4. Granulosa externa. 5. Plexiforme
externa. 6. Granulosa interna. 7. Plexiforme interna. 8. Células ganglionares. 9.
Fibras nerviosas. 10. Limitante interna.
7. Plexiforme interna, que contiene las articulaciones de las células bipolares y
multipolares y prolongaciones de las amacrinas.
8. Células ganglionares, formada por los cuerpos de las células multipolares.
9. De fibras nerviosas, formada por neuritas de las células multipolares que van
a formar el nervio óptico y algunas fibras centrı́fugas procedentes del cerebro.
10. Limitante interna, formada por la unión de los pies de las fibras de Müller.
Los fotorreceptores que contiene la capa nuclear externa, conos y bastones, son
capaces de captar y transformar la energı́a luminosa del espectro visible en impulsos
nerviosos. Los conos son poco sensibles a la luz y requieren gran intensidad luminosa
para su funcionamiento por lo que son las células óptimas para la visión diurna
(visión fotópica), permitiendo la discriminación de las formas y del color según
sus pigmentos, sensibles al rojo al amarillo o al azul. Los bastones, mucho más
abundantes, tienen un bajo umbral de excitación y de ellos depende la visibilidad y
la detección de movimiento en la oscuridad (visión crepuscular o escotrópica), pero
sólo perciben en blanco y negro.
Las células bipolares de la capa nuclear interna son las primeras neuronas intercaladas entre los fotorreceptores y las neuronas ganglionares.
En la siguiente capa las células ganglionares o multipolares representan las segundas neuronas de la vı́a óptica. Sus axones convergen hacia un punto de la retina,
la papila, y juntos atraviesan todas las capas de la retina que están por encima, a
la coroides y a la esclera en el área cribosa posterior, formando el nervio óptico.
Capı́tulo 2. Anatomı́a, fisiologı́a y óptica del aparato ocular humano
37
Figura 2.16: Arterias y venas de la retina en un fondo de ojo normal. Pueden
observarse la papila, en la zona de inserción del nervio óptico; la mácula lútea, y
próxima a ella, la fóvea central [Laguna, 2000].
La estratificación de la retina está presente en casi toda su superficie, pero desaparece en la zona anterior, donde sólo se conserva el estrato pigmentario fundido
con la coroides, con el cuerpo ciliar y con el iris. Esta retina residual, carente de
fotorreceptores y neuronas, recibe el nombre de retina ciega. La zona de transición
entre la retina sensorial y la ciega es la ora serrata, lı́nea de aspecto festoneado
situada por detrás de los procesos ciliares [Küchle and Busse, 1982; Rodriguez et al.,
1994].
Existen tres zonas puntuales en la retina que resultan determinantes para el
proceso de visión: fóvea, papila y mácula lútea, que pueden observarse en la Figura
2.16.
• La fóvea. Es una depresión poco profunda de la retina situada en el polo
posterior del ojo en el centro de la mancha amarilla. Las diversas capas de la
retina se van adelgazando progresivamente hacia el centro de la fóvea, punto
en el que existen solamente las cuatro primeras. Es el asiento de la visión
central y el área de la retina que proporciona la visión de más alta resolución
y precisión.
• La papila o punto ciego. Corresponde al punto de entrada del nervio óptico en
la retina y también el punto por el cual entran en el ojo las arterias retinianas
y salen del ojo las venas retinianas.
Tiene la forma de una excavación redondeada que se encuentra próxima a la
fóvea. Esta formada exclusivamente por la capa de fibras nerviosas, los vasos
sanguı́neos, y carece de sensibilidad visual.
• La mácula lútea. Es una mancha oval de aspecto sonrosado con una depresión
en el centro, la fóvea central. Junto con la fóvea y la región adyacente consti-
Modelado del ojo humano y tratamientos refractivos
38
tuyen la retina central, donde predominan los fotorreceptores de tipo cono (en
la fóvea existen únicamente conos), que la convierten en la zona de máxima
agudeza visual. Por fuera, la retina periférica, contiene fundamentalmente
células de tipo bastón y escasos conos.
2.1.4
Órganos anexos
Los órganos anexos son aquellos que, estando unidos al globo ocular, no forman
parte de él. Sin embargo, su funcionalidad está ı́ntimamente relacionada. Se consideran órganos anexos: la membrana conjuntiva, la cápsula de Tenon, los músculos
oculares y los órganos protectores: cejas, párpados y aparato lagrimal. A continuación se describen todos ellos.
Membrana conjuntiva
La membrana conjuntiva, o simplemente conjuntiva, es una membrana mucosa,
delgada y transparente, rica en glándulas que mantienen la humedad del ojo y
colaboran en la secreción lagrimal. La conjuntiva tapiza la cara posterior de los
párpados y la parte anterior de la esclera, dividiéndose en una parte palpebral y en
otra bulbar, unidas entre sı́ por los fondos de saco o fornix conjuntivales superior e
inferior.
La conjuntiva palpebral, en su parte más periférica, es rugosa para que no se
tense excesivamente en los movimientos palpebrales. La conjuntiva bulbar está
separada de la esclera por la cápsula de Tenon, con la que se fusiona a unos 3 mm
del surco esclerocorneal, formando el anillo conjuntival. A nivel del borde corneal,
la conjuntiva se transforma en el epitelio superficial de la córnea.
La conjuntiva tiene la función de actuar como barrera contra infecciones oculares,
y la mucina que segregan sus glándulas contribuye a constituir la capa mucosa de
la lágrima.
Cápsula de Tenon
La cápsula de Tenon es fibrosa y abraza toda la porción esclerotical del ojo, desde
el nervio óptico hasta la córnea. Es de consistencia flexible y elástica. Se encuentra
atravesada por el nervio óptico, los vasos y nervios ciliares y los músculos del ojo.
Facilita vainas aponeuróticas a los músculos del ojo, de las que parten expansiones aponeuróticas muy resistentes, que se insertan en las paredes de la cavidad
orbitaria, fijando el globo ocular.
Músculos
Los músculos oculares son un grupo de músculos estriados y voluntarios, fijados
al globo ocular, que le permiten realizar movimientos de orientación y exploración
Capı́tulo 2. Anatomı́a, fisiologı́a y óptica del aparato ocular humano
39
visual en todas las direcciones del espacio: verticales, horizontales, oblicuos y de
convergencia, aislados o asociados a los movimientos de la cabeza y el cuello. Los
movimientos oculares se caracterizan por ser conjugados, es decir, simultáneos y en
la misma dirección en ambos ojos, para permitir una visión binocular que dé lugar,
en ambos ojos simultáneamente, a una imagen de igual forma, tamaño, color... y
que pueda percibirse como única.
Los músculos oculares (Figura 2.17) se clasifican en:
1. Músculos rectos: Nacen en el fondo de la cavidad orbitaria, alrededor del
nervio óptico, y se dirigen en forma divergente al contorno del globo ocular,
donde se fijan a la esclera.
• Medio o interno: Abductor.
• Lateral o externo: Abductor.
• Superior: Elevador.
• Inferior: Depresor.
2. Músculos oblicuos
• Superior: Abductor y depresor. Se inserta por detrás en la vaina del nervio
óptico, entre los rectos superior e interno, y se dirige adelante hasta la parte
superior del globo del ojo.
• Inferior: Abductor y elevador. Nace de la parte inferior de la órbita, se dirige
hacia afuera y se inserta sobre la parte externa de la esclera.
Según su acción se agrupan en tres pares:
• Par recto interno - recto externo: giran el ojo alrededor de un eje vertical.
• Par recto superior - recto inferior: lo hacen alrededor de un diámetro algo
oblicuo respecto a la horizontal.
• Par oblicuo superior - oblicuo inferior: de los cuales el superior lleva la córnea
abajo y afuera, y el inferior, arriba y afuera.
De la acción combinada de los seis músculos del ojo resulta la rotación en todos
los sentidos. Sin embargo, el desplazamiento está impedido por acción del cuerpo
adiposo que rellena la órbita y al conjunto de fascias, interconexionadas entre sı́,
que retienen firmemente el globo en el interior de la órbita. A este propósito, los
músculos extrı́nsecos tienen una vaina fibrosa común, la fascia muscular; músculos
y fascia forman una especie de embudo que alberga el globo ocular, nervios y vasos.
Esta envoltura continúa con la cápsula de Tenon, que rodea el ojo desde el nervio
Modelado del ojo humano y tratamientos refractivos
40
Figura 2.17: Músculos asociados al globo ocular [Laguna, 2000].
óptico hasta el limbo esclerocorneal y le aı́sla del resto del contenido orbitario proporcionándole la cavidad o espacio episcleral en la que se mueve. Por detrás, la
fascia es muy fina y está perforada por los elementos que entran o salen del globo
ocular. Otras expansiones o fascias se dirigen a la conjuntiva, a los párpados y al reborde orbitario; la fascia palpebral parte de los párpados hasta el reborde orbitario
fijando, a modo de ligamento de contención, el globo ocular a la órbita [Laguna,
2000; Perkins and Hill, 1981].
Órganos protectores del globo ocular
Las Figuras 2.18, 2.19 y 2.20 muestran el conjunto de órganos protectores del
globo ocular, que se describen a continuación.
1. Cejas.
Las cejas son un par de eminencias arqueadas provistas de pelos. Debajo de
la piel se encuentran fibras musculares pertenecientes a músculos de la mı́mica
próximos, que elevan o deprimen la ceja, todos ellos inervados por el nervio
facial.
2. Párpados.
Los párpados constituyen la estructura protectora del ojo ante la luz y los
agentes externos. Además, con su movimiento mantienen la forma regular,
transparencia y brillo de la córnea, ası́ como la dispersión de las lágrimas
sobre la parte anterior del globo ocular y la limpieza de la superficie corneal.
Los párpados son dos pliegues músculo-membranosos, superior e inferior, que
nacen en el contorno de la órbita y limitan por su borde libre la hendidura
Capı́tulo 2. Anatomı́a, fisiologı́a y óptica del aparato ocular humano
41
Figura 2.18: El párpado, vista anterior una vez resecada la piel y los tegumentos.
La glándula lagrimal y los ligamentos palpebrales. 1 Glándula lagrimal 2. Rafe
palpebral 3. Tarso inferior 4. Hueso cigomático 5. Septo orbitario 6. Tarso superior
7. Hueso nasal 8. Apófisis ascendente del maxilar superior [Laguna, 2000].
palpebral, abertura elı́ptica transversal que deja ver una parte de la cara anterior del ojo.
En el borde libre se implantan oblicuamente las pestañas, pelos largos y fuertes,
ordenados en dos o tres filas, en número de 100 a 150 en el párpado superior,
y menos numerosos en el inferior, y se abren 25 a 30 agujerillos, por donde
vierten las glándulas de secreción oleosa de Meibonio, que forman una pelı́cula
de grasa sobre las lágrimas para darles estabilidad, retrasando su evaporación
e impidiendo que se viertan hacia el exterior.
La pared de los párpados está formada por piel, una capa conjuntiva, una capa
muscular, músculo orbicular y palpebral y la conjuntiva. Además, el párpado
superior posee el músculo elevador.
3. Aparato lagrimal.
El aparato lagrimal tiene por función segregar las lágrimas, que facilitan el
deslizamiento de los párpados sobre el globo ocular. Es posible distinguir dos
partes bien diferenciadas en el mismo.
• Glándula lagrimal. Es una glándula tubulosa compuesta, situada en el
ángulo súpero-externo de la órbita. Las lágrimas producidas por esta
glándula, están formadas por un lı́quido acuoso de reacción alcalina y
sabor salado, debido a su contenido de 1,3% de cloruro sódico, y una
pequeña cantidad de albúmina. Se vierten en la porción súpero-externa
del fondo del saco de la conjuntiva por varios conductos excretores, de allı́
42
Modelado del ojo humano y tratamientos refractivos
Figura 2.19: Vista anterior del cierre orbitario, el párpado, los ligamentos palpebrales y el músculo elevador del párpado. 1. Músculo elevador del párpado superior
2. Nervios lagrimales 3. Nervio facial 4. Tarso inferior 5. Músculo orbicular 6.
Nervio infraorbitario 7. Nervio 8. Cuerpo adiposo de la órbita 9. Tarso superior 10.
Ligamento palpebral medial 11. Saco lagrimal 12. Hendidura palpebral [Laguna,
2000].
se reparten por la superficie anterior del ojo y tienden a acumularse en
su ángulo interno, donde son recogidas por los dos conductos lagrimales.
• Conductos lagrimales. Se presenta un conducto lagrimal en cada párpado.
Convergen en un conducto común que desemboca en el saco lagrimal o
dacriocisto, que consiste en un reservorio membranoso, dispuesto verticalmente en la parte interna de la base de la órbita, y por su porción
inferior continúa con el conducto nasal.
Cerca del orificio inferior existe en el conducto nasal un repliegue, la
válvula de Horner, vestigio del diafragma membranoso que obtura las
vı́as lagrimales antes del nacimiento.
Las lágrimas se dispersan sobre la superficie ocular con el parpadeo, pero
tienden a acumularse en el ángulo interno del ojo, el lago lagrimal, desde
donde pasan por capilaridad al sistema de vı́as laterales excretoras. Estas
vı́as empiezan en los puntos lagrimales, abiertos en la cúspide de las papilas
lagrimales, y se continúan con los conductillos lagrimales, superior e inferior.
Cada uno de ellos tiene una pequeña porción vertical y una porción horizontal
que, aisladamente o unida con su homóloga, desembocan en el saco lagrimal,
situado en el canal lagrimal excavado entre el maxilar y el unguis. Hacia abajo,
el canal lagrimal se continúa con el conducto nasolagrimal, situado entre el seno
maxilar y las fosas nasales, y termina en el meato nasal posterior recubierto
frecuentemente por un repliegue mucoso, la válvula de Hasner [Laguna, 2000].
Capı́tulo 2. Anatomı́a, fisiologı́a y óptica del aparato ocular humano
43
Figura 2.20: Vı́as de producción y drenaje de la lágrima. 1. Glándula lagrimal 2.
Conductos excretores de la glándula lagrimal 3. Punto lagrimal superior 4. Saco
lagrimal 5. Conducto lagrimal superior 6. Carúncula lagrimal 7. Conducto lagrimal
inferior 8. Punto lagrimal inferior 9. Cornete medio 10. Orificio del conducto nasal
11. Meato inferior 12. Cornete inferior [Laguna, 2000].
2.2
La óptica del ojo humano
Para comprender el proceso de visión en el ojo humano deben conocerse las bases
fı́sicas del fenómeno óptico denominado refracción. En este capı́tulo se describe la
refracción, y cómo ésta se produce en el ojo. Se presta especial atención al mecanismo
de acomodación, gracias al cual el ojo logra cambiar su poder refractivo para enfocar
objetos cercanos o lejanos. Finalmente, se describen las anomalı́as refractivas más
frecuentes del ojo humano.
2.2.1
Refracción
La refracción es el fenómeno fı́sico que se produce, según muestra la Figura 2.21,
cuando un rayo luminoso L incide en un medio no homogéneo A, como el vidrio
o el agua. En el momento del contacto con la superficie, dicho rayo se bifurca en
dos. Uno de los rayos resultantes, R, cumple la ley de la reflexión mientras que el
otro, S, penetra en el material con un ángulo diferente al de incidencia. Una vez
atravesado el medio no homogéneo, el rayo L’ sigue la dirección del rayo inicial L.
Además, todos estos rayos, L, R, S y L’, se encuentran en un mismo plano.
El rayo reflejado siempre forma un ángulo con la normal igual al ángulo de
incidencia, sin embargo, en 1.621, el matemático y astrónomo holandés Willebrord
Snellius, observó que la luz, al cambiar de un medio de propagación a otro, sufrı́a
una desviación que guardaba relación con el ángulo de incidencia y con el ı́ndice
44
Modelado del ojo humano y tratamientos refractivos
Figura 2.21: Representación esquemática de la reflexión y la refracción de la luz.
Un rayo L incide en la superficie de un medio no homogéneo A, bifurcándose en
dos partes: un rayo R, que cumple la ley de reflexión, y un rayo S que atraviesa el
medio A, modificando su dirección de propagación. Al salir del medio A, el rayo L’
recupera la dirección de L.
de refracción del medio. El ı́ndice de refracción de un medio n se define como el
cociente entre la velocidad de la luz en el vacı́o c y la velocidad de la luz en ese
medio v :
c
(2.1)
n=
v
Partiendo de las observaciones realizados por Snellius, el también holandés Huygens, quien consideraba la luz como fenómeno ondulatorio, desarrolló la teorı́a de
los ı́ndices de refracción, concluyendo que en el interior del nuevo medio los rayos
se trasladan rectilı́neamente hasta encontrar la superficie lı́mite opuesta, actuando
nuevamente como rayos incidentes. A partir de estos principios se formuló la conocida como Ley de Snell, descrita por la ecuación (2.2), que relaciona los ı́ndices
de refracción de los materiales con los ángulos que forman los rayos incidente y
refractado con la normal a la superficie de incidencia (Figura 2.22 (a)):
n1 · sin Θ1 = n3 · sin Θ3
(2.2)
donde n1 es el ı́ndice de refracción del medio en que se propaga el rayo incidente,
Θ1 es ángulo de incidencia, n3 es el ı́ndice de refracción del medio alcanzado y Θ3
es el ángulo de refracción.
El fenómeno de refracción se aplica al estudio de las propiedades refringentes de
los distintos órganos que actúan como medio de transmisión de la luz en el globo
ocular, de modo que sea posible comprender su funcionalidad óptica, ası́ como cuantificar posibles efectos refractivos. Por ello se analiza, a continuación, la refracción
en el globo ocular.
Capı́tulo 2. Anatomı́a, fisiologı́a y óptica del aparato ocular humano
(a)
45
(b)
Figura 2.22: (a) Representación esquemática de la ley del Snell en la que se muestran
los ángulos de incidencia (Θ1 ), reflexión (Θ2 ) y refracción (Θ3 ). (b) La luz, al
atravesar una lente, converge en el punto focal, situado a distancia focal f del plano
medio de la lente.
2.2.2
La refracción en el ojo
La refracción en el ojo humano está determinada por la longitud axial y el poder
refringente de los medios transparentes, es decir, la córnea, el humor acuoso, el
cristalino y el cuerpo vı́treo, que componen lo que se conoce como aparato dióptrico.
La longitud axial es la distancia que existe entre el vértice anterior del ojo y el punto
opuesto en la retina, lo que puede ser considerado como el diámetro anteroposterior
del ojo, que normalmente mide unos 24 mm.
La potencia dióptrica total del ojo se encuentra entre las 58 y las 59 dioptrı́as
(D). De éstas, aproximadamente 43 D, es decir, el 75%, corresponden a la córnea
mientras que las 15 D restantes pertenecen al cristalino. Se define dioptrı́a (D) como
el poder refringente de una lente con una distancia focal f de un metro, D = f1 ,
siendo la distancia focal el punto de convergencia de los rayos de luz tras atravesar
una lente, denominado punto focal (Figura 2.22 (b)). En caso de emetropı́a, es decir,
en ausencia de errores refractivos, los rayos procedentes del infinito, que a efectos
prácticos se puede considerar como una distancia mayor de cinco metros, se refractan
de tal manera que convergen en un punto de la retina. El punto del que deben partir
los rayos con el fin de coincidir en la retina se llama punto remoto del ojo. El punto
remoto del ojo emétrope se sitúa, por tanto, en el infinito. La refracción ocular
expresada en dioptrı́as, que al mismo tiempo indica el tipo y graduación de unas
eventuales lentes correctoras, es igual al valor recı́proco de la distancia del punto
1
= 0.
remoto, es decir, para un ojo emétrope es ∞
46
Modelado del ojo humano y tratamientos refractivos
Figura 2.23: El cristalino es una lente biconvexa (imagen superior), lo que provoca
la inversión de la imagen (imagen inferior) [Küchle and Busse, 1982].
2.2.3
Óptica del cristalino. Mecanismo de acomodación
El cristalino es una lente biconvexa que, debido a su potencia óptica, juega
un papel relevante en la refracción total del ojo. Su forma biconvexa modifica la
dirección de los rayos que inciden en su superficie anterior de tal forma que al pasar
a través de su interior se invierten, incidiendo ası́ sobre la retina. La Figura 2.23
muestra el efecto de inversión de la imagen que provoca el cristalino por ser una
lente biconvexa.
El ojo humano es capaz de adaptar su potencia óptica para enfocar objetos
lejanos o cercanos, y lo hace mediante el proceso denominado acomodación. Durante
este proceso, el cristalino modifica su forma y sigue un pequeño desplazamiento
en dirección axial, aproximándose a la córnea. De esta forma logra aumentar su
potencia óptica mediante el aumento de las curvaturas de sus superficies anterior y
posterior adquiriendo una morfologı́a más esférica, lo que le confiere la capacidad de
enfocar un objeto cercano (estado “acomodado”). En el estado “desacomodado”, el
cristalino adopta su forma más plana (menor curvatura de las superficies anterior y
posterior), por lo que su potencia óptica es menor, permitiendo el enfoque de objetos
lejanos. La capacidad de acomodación se pierde de forma progresiva con la edad,
dando lugar a la presbicia o “vista cansada”.
El mecanismo de acomodación todavı́a no es bien conocido. Diversas teorı́as han
sido propuestas para tratar de explicarlo. La más aceptada es la teorı́a clásica de von
Helmholtz [1924], que consiste básicamente en que el músculo ciliar, al contraerse,
se mueve hacia delante en dirección axial, liberando la tensión que se ejercı́a sobre
el cristalino y permitiéndole adoptar su forma natural libre de tensiones, correspondiente al estado acomodado. En este estado, las superficies anterior y posterior del
Capı́tulo 2. Anatomı́a, fisiologı́a y óptica del aparato ocular humano
47
Figura 2.24: Representación esquemática de la geometrı́a ocular y de los mecanismos
ciliares en reposo (A, B) y durante el proceso de acomodación (C, D) [Crawford
et al., 1990; Rohen, 1979]. C: Córnea; I: Iris; L: Cristalino; CM: Músculo ciliar; T:
Sistema de fibras en tensión; P: Plexo de la zónula; SC: Canal de Schlemm; PPZ:
Zónula posterior, en pars plana; ZA: Zónula anterior.
cristalino alcanzan su máxima curvatura.
Al no conocerse con exactitud el mecanismo de acomodación, las causas de la
presbicia se desconocen. Las diversas teorı́as propuestas se pueden clasificar en
dos categorı́as principales: las que involucran una pérdida en la funcionalidad del
cristalino, y las que se basan en la pérdida de funcionalidad del músculo ciliar. A
continuación se exponen brevemente los procesos de acomodación y desacomodación,
según la teorı́a clásica de von Helmholtz [1924], que por ser la de mayor aceptación
ha sido la hipótesis de base en las simulaciones realizadas en esta tesis, descritas en
el Capı́tulo 7. Se presentan también, brevemente, otras teorı́as propuestas: la de
Coleman [1970] y la de Schachar [1992].
Teorı́a de Helmholtz
Hermann Von Helmholtz (1.821 - 1.894) enunció su teorı́a del mecanismo de
acomodación en la obra Handbuch der Physiologischen Optik. La teorı́a clásica de
Helmholtz es la de mayor aceptación entre las que han sido propuestas para explicar
el mecanismo de acomodación [Strenk et al., 2005]. A continuación se describe el proceso de cambio entre los estados desacomodado y acomodado o “acomodación” y el
proceso inverso, entre los estados acomodado y desacomodado o “desacomodación”.
El proceso de acomodación se representa en la Figura 2.24, que muestra el globo
48
Modelado del ojo humano y tratamientos refractivos
ocular en sección coronal, en el estado relajado desacomodado (A) y en un estado
intermedio del proceso de acomodación (C), ası́ como una sección transversal de las
estructuras implicadas en los mismos estados, (B) y (D), respectivamente. En ellas
se indica la córnea, C, el iris, I y el cristalino, L, ası́ como el músculo ciliar, CM,
el sistema de fibras en tensión, T, el plexo de la zónula, P, la zónula posterior en
pars plana PPZ, la zónula anterior ZA y el canal de Schlemm, SC. La flecha indica
la dirección del movimiento del músculo ciliar durante la acomodación [Crawford
et al., 1990; Rohen, 1979].
El proceso de acomodación se realiza mediante la contracción del músculo ciliar.
La masa muscular se desliza hacia delante a lo largo de la pared interior de la esclera.
El anillo ciliar formado por el borde del músculo se estrecha de forma similar a un
esfı́nter, se mueve hacia delante y hacia dentro del globo, y las fibras de la zónula
del pars plana se alargan, mientras que las fibras de la zónula anterior se vuelven
flácidas y pierden su tensión. El cristalino, al verse liberado de la tensión de las fibras
zonulares, se vuelve más esférico y su espesor axial se incrementa, desplazándose
hacia delante, mientras que el diámetro ecuatorial se reduce. El movimiento en la
zona posterior del cristalino está restringido por el humor vı́treo. Algunos estudios
muestran que se produce un movimiento hacia atrás de la superficie posterior del
cristalino y una traslación muy pequeña del centro de masa del mismo [Drexler
et al., 1997]. Finalmente, la superficie anterior del cristalino aumenta su curvatura,
aproximándose a la córnea. La disminución de los radios de las superficies anterior
y posterior produce un aumento de su potencia óptica, permitiendo enfocar objetos
cercanos. En la Figura 2.24 se puede observar este proceso: el músculo ciliar, CM,
se contrae para alcanzar la posición de acomodación (D) y el sistema de fibras en
tensión, T, ejerce una tracción en las fibras de la zónula posterior, PPZ. Como
consecuencia, las fibras de la zónula anterior, AZ, se relajan y el cristalino, L, se
vuelve más esférico, según indica la lı́nea de puntos.
Durante la desacomodación, el músculo ciliar se relaja, y es empujado hacia
atrás y hacia la superficie de la esclera por medio de la membrana de Bruch y las
fibras de la zónula posterior ZP [Glasser et al., 2001]. El anillo ciliar se expande,
restaurando la tensión en la zónula anterior ZA, cuyas fibras se tensan traccionando
al cristalino centrı́fugamente, en dirección radial, y hacia atrás, en dirección axial. El
espesor axial del cristalino disminuye, el diámetro ecuatorial aumenta y las superficies interiores, anteriores y posteriores disminuyen su curvatura. La profundidad de
cámara anterior aumenta y el cristalino se aplana; la superficie anterior del cristalino
se aleja de la córnea y la superficie posterior se mueve hacia el interior del cristalino,
aunque en menor proporción. Los cambios originados por la relajación del músculo
ciliar producen una disminución de la potencia óptica del globo ocular. Se puede
decir que, durante la visión lejana (cristalino en estado no acomodado), la distancia
focal es máxima y por lo tanto corresponde al valor dióptrico mı́nimo. Para poder
enfocar bien los objetos cercanos, la distancia focal ha de disminuir, como se aprecia
en la Figura 2.25, y por lo tanto el ojo debe tener mayor potencia óptica, lo que
Capı́tulo 2. Anatomı́a, fisiologı́a y óptica del aparato ocular humano
49
Figura 2.25: Óptica implicada en la visión del ojo humano.
se consigue aumentando las curvaturas de las superficies del cristalino durante la
acomodación.
El músculo ciliar activa el proceso de acomodación, permitiendo la liberación
de tensión en la zónula anterior ZA y que el cristalino adopte su forma relajada,
más esférica y curva. Cuando el músculo ciliar se relaja, fuerzas elásticas extralenticulares (ejercidas por la coroides posterior y la zónula posterior ZP) empujan al
músculo ciliar a su posición inicial, devolviendo la tensión a la zónula anterior ZA.
La parte de la zónula próxima al extremo del músculo ciliar, en las protuberancias
ciliares, es encargada de transmitir las fuerzas musculares y extra-lenticulares a la
cápsula [Rohen, 1979]. La desacomodación puede interpretarse como la aplicación
de fuerza al cristalino por medio de tejidos extra-lenticulares sin mediar señal neurológica, mientras que la acomodación representa un proceso activo neuro-muscular
que libera esas fuerzas extra-lenticulares [Bito and Miranda, 1989].
Se desconoce si el humor vı́treo actúa en el proceso. Puede considerarse que sirve
únicamente de soporte para estabilizar la superficie posterior del cristalino, aunque
podrı́a tener un papel más activo en la acomodación, comprimiendo la periferia del
cristalino y ayudándolo a adoptar una forma más esférica [Coleman, 1970]. Sin
embargo, no se han encontraron diferencias en la amplitud de la acomodación tras
la extracción del cuerpo vı́treo [Fisher, 1982].
Las curvaturas de las superficies internas (interfaces entre núcleo y córtex) son
concéntricas con las curvaturas de la superficie anterior y posterior capsular. La
curvatura anterior es menos pronunciada que la posterior [Brown, 1974; Bertasso
50
Modelado del ojo humano y tratamientos refractivos
and Neider, 1987] y aunque ambas superficies se incurvan durante la acomodación,
la anterior lo hace más rápidamente pero sin llegar nunca a alcanzar a la posterior.
Además, el cambio que se produce en el espesor axial del cristalino es, en su mayor
parte, debido al cambio que se produce en el espesor del núcleo, ya que el córtex
apenas varı́a su espesor [Brown, 1973, 1974; Bertasso and Neider, 1987; Koretz et al.,
1988; Koretz and Kaufman, 1990; Dubbelman et al., 2005]. Estas pautas permiten
definir la función objetivo en la simulación numérica del proceso de acomodación
que se realiza en el Capı́tulo 7.
Teorı́a de Coleman
La teorı́a de Coleman [1970, 1986] presenta variaciones respecto al mecanismo de
acomodación expuesto anteriormente, asignando al cuerpo vı́treo un papel relevante.
Esta teorı́a propone que el cristalino, la zónula de Zinn y la región anterior del cuerpo
vı́treo conforman un diafragma entre las cámaras anterior y posterior del ojo. La
contracción del músculo ciliar genera un gradiente de presión intraocular entre el
vı́treo, en el que aumenta la presión, y la cavidad del humor acuoso, en la que
disminuye, causando el desplazamiento frontal del cristalino asociado al proceso de
acomodación. Este estado, en el que la superficie anterior del cristalino presenta
un incremento en la curvatura de la parte central y un ligero aplanamiento en el
área periférica, se asimila en sección a la forma de una catenaria, por lo que se suele
referenciar a esta teorı́a como la “teorı́a catenaria”. La cápsula anterior y la zónula
de Zinn forman un conjunto similar a un trampolı́n o una hamaca, por lo que el
cuerpo ciliar condiciona la forma como los pilares de un puente suspendido, pero no
necesita ejercer una tracción ecuatorial para aplanar al cristalino.
Sin embargo, las observaciones de los desplazamientos en cristalinos in vitro
contradicen la hipótesis de que el vı́treo juegue un papel activo en la acomodación
[Fisher, 1982]. Estos trabajos sugieren que el humor vı́treo no es esencial durante el
proceso de acomodación.
Teorı́a de Schachar
En 1895, Tscherning propuso una teorı́a completamente opuesta a la de Helmholtz.
En ella se enunciaba que la contracción del músculo ciliar causa un aumento en la
tensión zonular y por lo tanto, durante la acomodación, la zónula tracciona al córtex
pero, debido a la rigidez del núcleo, no existe cambio en el espesor del cristalino durante la acomodación. En 1909, Tscherning admitió el aumento del espesor del
cristalino con la acomodación, pero mantuvo que la tensión zonular aumenta como
respuesta a la contracción del músculo ciliar. La teorı́a propuesta por Schachar
[1992] se basa en la de Tscherning, y es una de las más conocidas para explicar el
mecanismo de acomodación, junto a las teorı́as de Helmholtz y Coleman. Schachar
propone que, durante el proceso de acomodación, el músculo ciliar incrementa la
tensión de la zónula ecuatorial provocando un aumento del diámetro ecuatorial del
Capı́tulo 2. Anatomı́a, fisiologı́a y óptica del aparato ocular humano
(a)
(b)
51
(c)
Figura 2.26: (a) Ojo emétrope: la luz converge en la retina. (b) Ojo miope: la
luz converge en un punto situado frente a la retina. (c) Ojo hipermétrope: la luz
converge en un punto situado detrás a la retina.
cristalino, y desplazándose el contorno ecuatorial radialmente hacia la esclera, en
contraposición a la teorı́a de Helmholtz que consideraba la liberación de tensiones
de la zónula en estado acomodado, ası́ como el alejamiento del ecuador del cristalino
de la esclera. La teorı́a de Schachar justifica la presbicia por el continuo crecimiento
del cristalino, lo que a largo plazo imposibilita que el músculo ciliar logre tensar la
zónula ecuatorial. Sin embargo, las observaciones empı́ricas no dan soporte a esta
teorı́a. Se han obtenido imágenes en monos rhesus, mediante la técnica de biomicroscopı́a ultrasónica, que muestran cómo, durante el proceso de acomodación, el
ecuador del cristalino se aleja de la esclera de acuerdo con la teorı́a de Helmholtz,
y cómo en el estado de máxima acomodación, el cristalino se desplaza ligeramente
hacia abajo a causa de la acción de la gravedad, lo que implicarı́a que la tensión de
la zónula se ha liberado. Además, se ha observado en pacientes con albinismo ocular
[Wilson, 1997], en los que la ausencia de pigmentación en el iris permite observar
el ecuador del cristalino, que al igual que ocurre en los monos rhesus [Glasser and
Kaufman, 1999] el diámetro ecuatorial disminuye con la acomodación.
2.2.4
Anomalı́as en la capacidad de refracción
Como se ha expuesto anteriormente, en un ojo emétrope los rayos de luz convergen en un punto de la retina (Figura 2.26 (a)). La refracción del ojo depende de que
la proporción existente entre la longitud axial y el poder refringente de los medios
sea adecuada. Si existe una desproporción entre ambas, aparece lo que se conoce
como ametropı́a o visión defectuosa.
Si los rayos incidentes paralelos convergen por delante de la retina, en el cuerpo
vı́treo, el defecto se conoce como miopı́a (Figura 2.26, (b)); si los rayos convergen
detrás de la retina, se denomina hipermetropı́a (Figura 2.26, (c)).
La causa de estas anomalı́as en la refracción suele ser una distancia axial demasiado larga, en el caso de la miopı́a, o demasiado corta, en el caso de la hipermetropı́a,
lo que se conoce con el nombre de ametropı́a axial. En algunas ocasiones puede
52
Modelado del ojo humano y tratamientos refractivos
tener una adecuada longitud axial, en cuyo caso la anomalı́a refractiva se debe a
una alteración del poder refringente de alguno de los medios, dando lugar a una
ametropı́a de refracción, secundaria a una curvatura anómala de la córnea o del
cristalino o a una variación del ı́ndice de refracción del cristalino.
Los factores disposicionales, a menudo considerables, desempeñan un papel esencial en la aparición de las frecuentes ametropı́as axiales. El ojo, en principio corto,
del recién nacido (conocido como hipermetropı́a fisiológica del lactante) crece longitudinalmente durante el primer año de vida y se va haciendo progresivamente
emétrope gracias a un proceso de miopización. Las desviaciones mı́nimas de la longitud definitiva del bulbo respecto a la normalidad (en torno a 24 mm) dan lugar
a hipermetropı́as o miopı́as de grado moderado, ya que 1 mm de variación en la
longitud axial produce una diferencia de refracción de 3 D, aproximadamente.
Otra anomalı́a refractiva es el astigmatismo, que consiste en un defecto de refracción generalmente causado por la desigualdad, de origen congénito, de la potencia óptica de los distintos meridianos de la córnea.
La incapacidad del ojo para adaptarse a la visión cercana por la pérdida progresiva del poder acomodativo, a partir de cierta edad, se conoce como presbicia
o “vista cansada”, y constituye una anomalı́a refractiva que afecta al 100% de la
población mayor de 40-45 años.
A continuación se presentan con mayor detalle todas estas anomalı́as refractivas
del ojo: hipermetropı́a, miopı́a y astigmatismo, ası́ como la presbicia.
La hipermetropı́a
La hipermetropı́a provoca una visión defectuosa de los objetos situados a corta
distancia. Está generalmente causada por la disminución congénita de la longitud
axial (hipermetropı́a axial), y más raramente, por la reducción intensa de poder
refringente del aparato dióptrico debida entre otras causas a un radio de curvatura
demasiado grande de la córnea o del cristalino, afaquia (falta del cristalino), o a que
el ı́ndice de refracción del cristalino es demasiado pequeño.
El cuadro clı́nico que presenta se caracteriza porque los rayos incidentes paralelos convergen por detrás de la retina, como se puede observar en la Figura 2.26 (c).
Sólo algunos rayos de luz, tras la refracción, convergen en un punto de la retina,
por lo que el punto remoto virtual se sitúa por detrás del ojo. Este defecto de refracción puede ser compensado por el ojo mediante la acomodación del cristalino,
que aumenta su poder refringente. Sin embargo, la necesidad de que el cristalino
esté constantemente modificando su estado acomodativo para ver de cerca o de lejos
da lugar a un espasmo de acomodación, que consiste en una respuesta acomodativa
mayor que la necesaria para un objeto próximo al ojo, es decir, se produce un acercamiento del punto remoto. Ante la continua modificación del estado del cristalino,
también se produce astenopı́a de acomodación (cefaleas). La convergencia asociada
a la acomodación puede determinar también un estrabismo interno (estrabismo con-
Capı́tulo 2. Anatomı́a, fisiologı́a y óptica del aparato ocular humano
53
vergente concomitante). El grado de hipermetropı́a compensado por la acomodación
se denomina hipermetropı́a latente y la que resta, hipermetropı́a manifiesta. Al determinar la refracción se debe contar con la hipermetropı́a global, que es la suma de
la hipermetropı́a manifiesta más la latente. Por este motivo, para la determinación
de la hipermetropı́a se debe anular previamente la acomodación del cristalino mediante el uso de colirios especı́ficos.
La hipermetropı́a suele ser moderada. En pocos casos supera las 6 D e incluso
puede disminuir algo en el transcurso de los años. El aumento de este defecto de
refracción sólo se puede confundir con la anulación de la capacidad de acomodación
debida a la edad. Las hipermetropı́as considerables se asocian a la ambliopı́a u
“ojo vago”, que consiste en la disminución de la agudeza visual sin causa orgánica
conocida. En algunos casos puede apreciarse además un aplanamiento de la cámara
ocular anterior, lo que indica una predisposición para el glaucoma de ángulo cerrado,
y enrojecimiento, falta de delimitación y prominencia mı́nima de la papila.
La miopı́a
La miopı́a causa una dificultad para apreciar claramente los objetos situados a
larga distancia. Generalmente, está causada por un excesivo crecimiento longitudinal del globo ocular, normalmente de origen congénito, lo que se conoce como
miopı́a axial. La miopı́a maligna rápidamente progresiva, a menudo de herencia
recesiva, además de una longitud axial demasiado larga causada por el crecimiento
excesivo del ojo, se produce un cambio de la morfologı́a más o menos esférica del
globo ocular, adoptando una forma ovoidal. Existen otros factores cuya influencia
la aparición y progresión de la miopı́a está en discusión, como el trabajo intenso a
corta distancia (miopı́a escolar) y otros factores exógenos. Otra causa de miopı́a,
aunque muy poco frecuente, es el aumento de la curvatura de la córnea o del cristalino (miopı́a de refracción) o por el aumento del ı́ndice de refracción del cristalino
debido a la aparición de opacidad del núcleo (miopı́a nuclear).
En el ojo miope los rayos paralelos de luz, tras la refracción, convergen en un
punto del cuerpo vı́treo, por delante de la retina, como se muestra en la Figura 2.26
(c). La medida de la miopı́a tiene siempre valor negativo, en dioptrı́as, debido a que
el punto de convergencia de los rayos se forma frente a la retina; al contrario que la
hipermetropı́a, cuyo valor es siempre positivo.
La imagen puntiforme de la retina sólo se logra con la divergencia del haz de
radiación incidente. Por lo tanto, como los rayos incidentes sólo pueden partir de
objetos situados a menos de cinco metros, el punto remoto del ojo miope no se halla
en el infinito sino más próximo al ojo que los cinco metros equivalentes al infinito
virtual. Por este motivo, la visión es correcta para distancias cortas, pero no para
distancias largas.
El ojo miope no tiene posibilidad de compensarse. Para mejorar la visión de
la lejanı́a puede reducirse la hendidura palpebral, porque de este modo se produce
Modelado del ojo humano y tratamientos refractivos
54
(a)
(b)
(d)
(c)
(e)
Figura 2.27: (a) Astigmatismo regular miópico simple en el eje vertical. (b) Astigmatismo regular hipermetrópico simple en el eje horizontal. (c) Astigmatismo regular miópico compuesto. (d) Astigmatismo regular hipermetrópico compuesto. (e)
Astigmatismo mixto: en el eje horizontal aparece hipermetropı́a, mientras que el
vertical sufre de miopı́a.
un efecto de diafragmado, disminuyendo el cı́rculo de dispersión que incide sobre
la retina (“miopı́a” significa literalmente “cerrar los ojos”). En muchos casos, la
miopı́a tiene un nivel leve o moderado, lo que se considera hasta aproximadamente
-6 D, y después permanece estacionaria como una anomalı́a de refracción inocua.
Sin embargo, en algunos casos progresa de manera inevitable y fatal hasta -30 D
e incluso más. Esta miopı́a maligna excesiva es una patologı́a ocular grave que
determina una alteración muy intensa de la distensión de la coroides y retina en la
región del polo posterior (fondo de ojo miope), reduce considerablemente la visión
e incluso puede causar ceguera.
El astigmatismo
El astigmatismo es una anomalı́a de la refracción esférica que imposibilita la
formación de una imagen puntiforme en la retina, debido a que la córnea no presenta
la misma curvatura en todos sus meridianos.
El astigmatismo más frecuente es el regular (Figura 2.27(a-d)), en el cual, el
meridiano de mayor curvatura o de máxima refracción, y el de mı́nima curvatura
o de mı́nima refracción (meridianos principales), son ortogonales entre sı́. El astigmatismo aparece a menudo asociado a hipermetropı́a o miopı́a, e incluso a veces
Capı́tulo 2. Anatomı́a, fisiologı́a y óptica del aparato ocular humano
(a)
55
(b)
Figura 2.28: (a) Topografı́a de la superficie anterior corneal.(b) Patrones topográficos de astigmatismo [Cristóbal, 2006]. Rojo: Áreas de mayor curvatura,
en las que los meridianos tienen mayor poder refractivo. Azul: Áreas de menor
curvatura.
presenta refracción hipermétrope en uno de los ejes principales y miope en el otro, lo
que se conoce como astigmatismo mixto, como se muestra en la Figura 2.27 (e). Con
menos frecuencia, el astigmatismo puede estar causado por irregularidades corneales
adquiridas, causas por cirugı́as, traumatismos o inflamaciones [Bores, 2007].
El astigmatismo regular es generalmente estacionario durante toda la vida, y
da lugar a frecuentes cefaleas y molestias astenópticas. Por otra parte, el astigmatismo irregular puede causar, además, deslumbramientos como consecuencia de la
refracción irregular de la luz.
El astigmatismo se mide como la diferencia refractiva, en dioptrı́as, entre los
meridianos de mayor y menor poder óptico; además, se indica el ángulo en el cual
se posiciona el eje astigmático. Para la medida del astigmatismo se utilizan refractómetros y queratómetros, aparatos frecuentes en la consulta oftalmológica que
se presentan en el apartado 2.3.1. Además, en el estudio clı́nico del astigmatismo
es de gran interés la topografı́a corneal, pues ofrece información adicional de la refracción corneal (Figura 2.28 (a)). Los mapas topográficos representan el relieve de
la superficie corneal, y se describen en el apartado 2.3.1. La Figura 2.28 (b) muestra
algunos patrones topográficos, que representan diferentes tipos de astigmatismo. La
segunda imagen de la primera fila muestra un astigmatismo regular simétrico, el
cual se reconoce por la presencia de un área en forma de lazo llamada “pajarita
astigmática”; se representa en colores calientes, lo cual indica que está centrada en
torno al eje astigmático de máxima refracción.
Atendiendo a la orientación del meridiano de mı́nima refracción, el astigmatismo
se clasifica en tres tipos: a favor de la regla o directo, en contra de la regla o inverso,
y oblicuo. Los tres tipos se pueden observar en las topografı́as corneales mostradas
por la Figura 2.29. Fisiológicamente es más frecuente que el mayor poder refractivo
Modelado del ojo humano y tratamientos refractivos
56
(a)
(b)
(c)
Figura 2.29: Imágenes de topografı́as que muestran los tres tipos de astigmatismo
según la orientación del meridiano de mı́nima refracción [Cristóbal, 2006]. (a) A
favor de la regla, (b) En contra de la regla y (c) Oblı́cuo.
se presente en el meridiano vertical (más curvo), por lo que este tipo de astigmatismo
se denomina a favor de la regla. Incluye aquellos astigmatismos cuyo eje de mı́nima
refracción está comprendido entre 0o y 30o , ası́ como entre 150o y 180o .
Si el meridiano de mı́nima refracción está próximo a la vertical, se dice que es
un astigmatismo en contra de la regla. El eje de mayor curvatura o más refringente
es el horizontal. Su eje de mı́nima refracción está entre 60o y 120o .
Los astigmatismos oblicuos son aquellos en que los meridianos principales están
a más de 30o de los meridianos horizontal y vertical. Su eje de mı́nima refracción
está comprendido entre 30o y 60o , y entre 120o y 150o .
La presbicia
La pérdida de la capacidad acomodativa del cristalino con la edad se denomina
presbicia. La presbicia afecta al 100% de la población a partir de cierta edad.
Esta pérdida progresiva comienza desde el inicio de la vida y acaba produciendo la
incapacidad total para enfocar objetos cercanos, al alcanzar una edad aproximada
de 60 años.
La causa de la presbicia se desconoce, puesto que el mecanismo de acomodación
en sı́ mismo no es bien conocido, dando lugar a diversas teorı́as que se exponen
en el apartado 2.2.3. A pesar de ello, es comúnmente aceptado que la causa de
la presbicia es multifactorial, no pudiendo establecer un único responsable de la
pérdida de la capacidad acomodativa [Weale, 1989]. Diversos cambios con la edad
han sido observados clı́nicamente y pueden tener su contribución a esta disfunción:
la modificación de las propiedades de material del cristalino, la pérdida de capacidad
de contracción del músculo ciliar, etc. A continuación se considera cada uno de los
agentes posiblemente relacionados con la aparición de la presbicia: músculo ciliar,
componentes extralenticulares, humor vı́treo y cristalino.
Capı́tulo 2. Anatomı́a, fisiologı́a y óptica del aparato ocular humano
57
• Músculo ciliar. Una posible causa de la presbicia parece ser la disfunción progresiva, con la edad, del músculo ciliar motivada posiblemente por la pérdida
de elasticidad de los tendones posteriores del músculo, fibras de la zónula posterior o de la coroides [Croft et al., 1992], aunque también podrı́a ser debido
a cambios neuro-musculares relacionados con la edad [Tamm et al., 1988].
Sin embargo, de estos estudios se deduce que, a pesar de que se reduce el
movimiento del músculo ciliar, la pérdida de la capacidad de acomodación
no se puede justificar únicamente por la degeneración de la subestructura del
músculo. El número de receptores neuro-musculares no varı́a con la edad, y
tampoco se han hallado cambios en la actividad de las enzimas para el neurotransmisor que controla la contracción del músculo ciliar [Gabelt et al., 1990].
Por lo tanto, el sistema neuro-muscular parasimpático permanece intacto con
la edad, pudiendo descartarse su implicación en la disfunción del músculo ciliar.
• Componentes extralenticulares. Estudios realizados con monos rhesus muestran una disminución de elasticidad de la membrana de Bruch (capa más
interna de la coroides) con la edad [Croft et al., 2006], que puede ser la responsable de la pérdida de movimiento del músculo ciliar y por tanto, de la
amplitud de acomodación. Si el tejido de dicha membrana se hace más rı́gido,
el músculo ciliar no puede moverse axialmente hacia delante cuando se contrae,
permaneciendo anclado posteriormente. Los tendones elásticos posteriores son
más gruesos y tienen más cantidad de microfibras y colágeno en los ojos de
monos adultos, por lo que puede estar asociado con la disminución de elasticidad del tejido. También se ha observado en monos adultos que la respuesta
del músculo ciliar a los estı́mulos se vuelve a restaurar por completo si dichos
tendones son seccionados [Tamm et al., 1991; Croft et al., 1992].
La progresiva restricción de la movilidad del músculo ciliar relacionada con la
edad debida a una disminución de la elasticidad de los ligamentos posteriores
podrı́a ser un factor de influencia en el desarrollo de la presbicia. Como se
ha comentado, la presbicia parece ser debida a la combinación de diversos
factores, por lo que parece razonable que las contribuciones por un lado de la
inmovilidad del músculo ciliar, y por otro, de la inmovilidad del cristalino, no
sean mutuamente excluyentes [Glasser and Campbell, 1998].
• Humor vı́treo. Si el vı́treo tuviese un papel relevante en la acomodación,
además de aportar soporte y estabilidad a la superficie posterior del cristalino,
se podrı́a considerar que los cambios que tienen lugar en el vı́treo con la edad
podrı́an intervenir en la evolución de la presbicia [Schneider et al., 2001]. El
vı́treo se vuelve progresivamente más lı́quido con la edad, lo que afectarı́a a la
compresión en su área periférica. Alternativamente el hecho de que el propio
cristalino crezca, podrı́a hacer que el vı́treo no pudiese cumplir su “supuesta”
58
Modelado del ojo humano y tratamientos refractivos
Figura 2.30: Izquierda: Corrección de hipermetropı́a mediante lente convexa.
Derecha: Corrección de miopı́a mediante lente cóncava.
función acomodativa. El vı́treo no parece desempeñar un papel fundamental
en la acomodación [Fisher, 1983]. Si bien sirve de soporte, no produce cambios
importantes en la geometrı́a cristaliniana durante la aplicación de las fuerzas
ciliares, por lo que su efecto no es considerado en las simulaciones realizadas
en esta tesis (Capı́tulo 7).
• Cristalino. Diversos trabajos parecen confirmar que los cambios en las propiedades del cristalino con la edad están involucrados en la evolución de la
presbicia [Manns et al., 2007]. De entre las propiedades que evolucionan con
la edad, las que se cree que tienen mayor relación con la presbicia son la elasticidad de los materiales [Fincham, 1937], ası́ como las variaciones geométricas
que sufre el cristalino a lo largo de la vida [Koretz et al., 1988]. Se ha observado
en la realización de ensayos mecánicos, una rigidización general de los tejidos
del interior del cristalino (núcleo y córtex) [Manns et al., 2007]. Además, la
cápsula varı́a su espesor según se indica en el apartado 2.1.3. Puesto que la
cápsula desempeña un papel importante en el moldeado del cristalino en su
estado acomodado [Croft et al., 1992], se puede deducir que la variación de
espesor capsular con la edad influye en la acomodación. La cápsula pierde
elasticidad con la edad [Fisher, 1969] y se vuelve más frágil [Krag et al., 1997;
Krag and Andreassen, 2003a].
Corrección de errores refractivos
Las anomalı́as refractivas que han sido presentadas deben ser corregidas con el
fin de mejorar la visión del paciente, y con ello, facilitar su calidad de vida. El uso
de lentes (gafas) es el método más común de corrección, ya que permite la corrección
de todas las anomalı́as refractivas, incluso combinadas.
• La corrección de la miopı́a se realiza mediante el empleo de lentes cóncavas,
que dispersan las radiaciones incidentes paralelas de forma que procedan del
punto remoto del ojo (Figura 2.30, derecha). El empleo de lentes logra una
excelente corrección. Sin embargo, no influye especialmente sobre la evolución
de la miopı́a y no existe ninguna medida eficaz que impida su progresión.
Capı́tulo 2. Anatomı́a, fisiologı́a y óptica del aparato ocular humano
59
Figura 2.31: Corrección de astigmatismo miópico mediante lente cilı́ndrica. La
curvatura de la lente en el eje de mayor poder refractivo (plano horizontal en la
imagen) logra que el punto de convergencia se desplace hacia atrás, hasta la retina;
la lente no modifica la refracción de la luz en el eje perpendicular a él (plano vertical).
• Para la corrección de la hipermetropı́a se utilizan de lentes convexas, lo que
equivale a disminuir el radio de curvatura de la córnea, de manera que el
enfoque de los rayos se produzca en la retina (Figura 2.30, izquierda).
• La corrección del astigmatismo es necesaria en caso de que el defecto de refracción produzca una reducción considerable de la agudeza visual o molestias
astenópticas (relacionadas con la visión de cerca: malestar ocular, visión borrosa, etc). Para ello, se prescriben lentes cilı́ndricas (Figura 2.31) que actúan
sobre uno de los ejes principales a modo de lente convergente o dispersante,
sin modificar el eje óptico perpendicular a él [Bouchet and Cuilleret, 1979;
Rodriguez et al., 1994; Perkins and Hill, 1981; Küchle and Busse, 1982].
• Para la corrección de la presbicia se puede corregir únicamente la visión cercana, con lentes similares a las utilizadas para la corrección de hipermetropı́a.
También puede utilizarse lentes multifocales o progresivas, que permiten enfocar objetos lejanos y cercanos.
Las lentes de contacto o “lentillas” son útiles en la corrección de los defectos de
graduación, pero precisan unas mı́nimas habilidades para su manejo y son susceptibles de intolerancias, infecciones y problemas especı́ficos de las propias lentillas.
Para la correcta graduación de las lentes se emplean métodos de tipo objetivo y
subjetivo. Los métodos objetivos sirven para determinar la refracción sin influencia
del paciente. Estos métodos son: la esquiascopı́a de manchas, estrı́as o cilindros (o
prueba de “la sombra”), la exploración con refractómetro, y la oftalmoscopı́a directa
con oftalmoscopio eléctrico. La determinación de la refracción corneal se realiza con
el queratómetro, cuyo fundamento se basa en que el tamaño de la imagen reflejada
depende del radio de curvatura de la córnea [Bouchet and Cuilleret, 1979; Rodriguez
et al., 1994; Perkins and Hill, 1981; Küchle and Busse, 1982]. Este aparato se describe
brevemente en el siguiente apartado.
Los métodos subjetivos precisan de la participación del paciente y se utilizan
posteriormente a los métodos objetivos, con el fin de lograr una óptima agudeza
60
Modelado del ojo humano y tratamientos refractivos
Figura 2.32: Foróptero de LuxVision, USA (izquierda). El foróptero es un aparato
utilizado para determinar la graduación que necesita el paciente. Es un complejo
diseño de portalentes en las que se colocan lentes de distinta potencia, mientras el
paciente interpreta el optotipo (derecha), columna de letras verticales, a 5 m para
valorar la visión lejana y a 40 cm para la cercana.
visual y comodidad del paciente. El aparato utilizado para esta valoración es el
foróptero, que se muestra en la Figura 2.32 izquierda. Consiste en un complejo
diseño de portalentes en las que se colocan lentes de distinta potencia, mientras el
paciente interpreta el optotipo (Figura 2.32, derecha), en el cual se muestra una
columna de letras de distintos tamaños; el paciente debe ubicarse a dos distancias:
a 5 m para valorar la visión lejana, y a 40 cm para la cercana. En el paciente con
miopı́a, la realización de pruebas de lectura proporciona un valor aproximado para
la determinación del punto remoto.
Existen distintas técnicas quirúrgicas que permiten corregir los defectos refractivos. Este tipo de cirugı́a se denomina “cirugı́a refractiva”. Puede realizarse mediante el tallado de la córnea por radiación láser, de tal manera que se modifica la
curvatura corneal, logrando compensar los errores refractivos. Para la corrección del
astigmatismo puede también practicarse cirugı́a incisional, que consiste en realizar
incisiones denominadas “relajantes” por su efecto de aplanamiento o relajación del
meridiano corneal utilizado como eje geométrico de la incisión, modificando su curvatura. Algunas técnicas de cirugı́a refractiva se describen en el Capı́tulo 3.
Otra técnica de cirugı́a refractiva es la implantación de lentes intraoculares o
LIO’s. Se utiliza en casos de muy elevada miopı́a o hipermetropı́a. Consiste en
el implante de pequeñas lentes, muy flexibles, que se insertan entre la córnea y el
cristalino, o bien, en el interior del saco capsular, en casos de afaquia (ausencia de
cristalino) o tras la facoemulsificación (eliminación mediante ultrasonidos del interior
del cristalino). Permiten altas correcciones y son de fácil implantación. Aunque
en principio son permanentes, son de fácil explantación si se requiere modificar la
corrección refractiva o en el caso, poco frecuente, de alguna complicación.
Capı́tulo 2. Anatomı́a, fisiologı́a y óptica del aparato ocular humano
61
Respecto a la presbicia, existen diversas posibilidades quirúrgicas, como el implante de LIO’s o el tallado corneal. La implantación de LIO’s ofrece las mismas
posibilidades que las gafas, pudiendo corregirse únicamente la visión monofocal o
bien, la visión cercana y lejana mediante LIO’s multifocales. El uso de LIO’s como
cirugı́a refractiva suele estar asociado a la cirugı́a de la catarata.
2.3
Medida y diagnosis
En este apartado se hace una revisión de los aparatos de medida y diagnosis
relacionados con la detección de errores de refracción y patologı́a refractiva del ojo
humano que, de alguna manera, están relacionados con la temática de esta tesis.
Para el diagnóstico clı́nico es necesario poder estimar la morfologı́a de la córnea,
tanto sana como patológica, ası́ como otras estructuras relacionadas. A continuación
se exponen algunos aparatos utilizados con este fin. Algunos son frecuentes en la
consulta oftalmológica, como los refractómetros y queratómetros, tonómetros y la
lámpara de hendidura. Otros no son tan frecuentes, ya sea por su alto coste o por
ser de aplicación muy especı́fica, no siendo necesarios para un uso genérico; entre
estos se encuentran los paquı́metros, que ofrecen medidas o estimaciones de espesor
corneal; los topógrafos, que estiman el relieve de las superficies corneales, etc.
Se presta especial atención al equipo denominado Ocular Response Analyzer
(Reichert Ophthalmic Instruments, Inc., Depew, New York), al que se ha dedicado
un apartado, dado que en el desarrollo de esta tesis ha desempeñado un importante
papel. Se ha realizado una simulación numérica de la toma de medidas que realiza
el ORA, que se presenta en el Capı́tulo 6, con el objetivo de caracterizar in vivo las
propiedades de la córnea mediante un análisis inverso.
2.3.1
Equipos comunes de examen y diagnosis
Refractómetros y queratómetros
El refractómetro es un equipo que mide la potencia óptica del ojo del paciente.
Los refractómetros utilizados actualmente se basan en la técnica de refracción automatizada, por lo que también se les denomina auto-refractómetros. Esta técnica
está entre las conocidas como “objetivas”, es decir, la medición no depende de la respuesta del paciente. Hoy en dı́a los auto-refractómetros alcanzan aceptables niveles
de precisión. Su funcionamiento es rápido y sencillo: el clı́nico presiona el control
de medición y la medida de la refracción se hace instantáneamente.
El queratómetro es un instrumento que mide la curvatura de la córnea, determinando ası́ la óptica corneal. Se basa en el fenómeno óptico de la reflexión de la
luz, según el cual un objeto emitiendo luz en la dirección de una superficie esférica
reflectante produce una imagen reducida, derecha y virtual, situada en el interior
de la superficie. El aparato consta de un “objeto” luminoso, que se refleja en la
62
Modelado del ojo humano y tratamientos refractivos
Figura 2.33: Tonómetro de contacto acoplado a la lámpara de hendidura.
córnea formando una imagen virtual. El tamaño de esta imagen está directamente
relacionado con el radio de curvatura de la superficie corneal. Según la llamada
, que relaciona los cuatro parámetros implicados
fórmula queratométrica, R = 2dI
O
(radio de curvatura corneal R, tamaño del objeto O, tamaño de la imagen virtual I
y distancia entre el objeto y la superficie corneal d ) el aparato determina el radio
de curvatura corneal, y con él, su refracción.
Los queratómetros son aparatos imprescindibles en la consulta oftalmológica, y
suelen estar integrados en los refractómetros.
Tonómetros de aplanación o de contacto
El aparato que mide la presión intraocular (PIO) se llama tonómetro. Existen
varios tipos de tonómetros y todos se basan en el mismo principio: el ojo ofrece una
resistencia a ser deformado que es directamente proporcional a la presión que hay en
su interior. Por tanto, el tonómetro debe ejercer una fuerza sobre la parte externa
del ojo y medir su deformación. El clı́nico tiene acceso a dos estructuras del ojo: la
córnea y la esclera. Puesto que la esclera es bastante más rı́gida y heterogénea, la
tonometrı́a se realiza sobre la córnea. La medición es totalmente indolora, debiendo
aplicarse previamente unas gotas de anestesia tópica. Los primeros tonómetros
utilizaban un método ya obsoleto basado en un sistema de pesas. La tonometrı́a
actualmente vigente es la llamada tonometrı́a de aplanación, que se realiza con el
prisma de Goldmann. Este tonómetro es el más exacto, consiguiendo mayor precisión
que otros de aparición más reciente. Se puede acoplar a la lámpara de hendidura
(tonómetro de Goldmann, Figura 2.33) o ser un dispositivo independiente portátil
(tonómetro de Perkins).
El funcionamiento del tonómetro de Goldmann se basa en el aplanamiento de
la córnea por contacto. El extremo plano del prisma se posiciona sobre la parte
central de la córnea y presiona su superficie, rectificando ası́ la curvatura natural de
la córnea (Figura 2.34). Es decir, la aplana. La resistencia natural de la córnea a
ser deformada y la presión que hay en el ojo son los dos factores que se oponen a la
aplanación. El tejido de la córnea es relativamente homogéneo, por lo que para un
Capı́tulo 2. Anatomı́a, fisiologı́a y óptica del aparato ocular humano
63
Figura 2.34: Bases fı́sicas del funcionamiento de la tonometrı́a de aplanación de
Goldmann.
Figura 2.35: Lámpara de hendidura.
grosor estándar de la córnea, se puede estimar la PIO con precisión.
Existen también tonómetros de aire o neumotonómetros. El fundamento es el
mismo que el de la tonometrı́a de contacto: una columna de aire deforma la córnea y
el dispositivo monitoriza y registra la deformación corneal provocada. Este aparato
no es utilizado en la consulta oftalmológica sino en los establecimientos de óptica,
pues puede ser utilizado con personal sin formación clı́nica.
La medida de la PIO es un parámetro fundamental para la determinación de
ciertas patologı́as. Valores normales de PIO son 15±5 mmHg. Valores superiores
a 21 mmHg alertan de la presencia de alguna patologı́a, pudiendo alcanzar los 60
mmHg en cuadros de glaucoma agudo.
Lámpara de hendidura
El aparato más común en la consulta oftalmológica es la lámpara de hendidura.
Se basa en una técnica denominada biomicroscopı́a, y consiste en una luz que incide en la córnea, iluminando una sección vertical en todo su espesor, pudiéndose
observar con un gran aumento la córnea, el cristalino e incluso la retina, habiendo
64
Modelado del ojo humano y tratamientos refractivos
Figura 2.36: Izquierda: La topografı́a o mapa de elevación representa la diferencia
de cota de cada punto de la superficie corneal respecto a una superficie de referencia,
en general una esfera (BFS). Derecha: Topografı́a tomada por Pentacam (Oculus).
Los puntos por encima de la BFS tienen elevación positiva y se representan en tonos
calientes; los puntos bajo la BFS tienen elevación negativa y se representan en tonos
frı́os.
dilatado la pupila previamente. De esta forma, el clı́nico puede ver las estructuras
oculares y detectar a simple vista diversas irregularidades o patologı́a ocular de
córnea, segmento anterior y retina. La Figura 2.35 muestra una córnea que está
siendo examinada en la lámpara de hendidura.
Topógrafos
Los topógrafos son aparatos que estiman el relieve de las superficie anterior de
la córnea. Los más avanzados (Orbscan de Bausch&Lomb, Pentacam de Oculus)
estiman además la superficie posterior, ası́ como la paquimetrı́a y medidas del segmento anterior. Realizan un escaneado de la superficie del ojo en puntos determinados (por ejemplo, Orbscan II (Bausch&Lomb) analiza 9000 puntos en 1,5 segundos)
generando un mapa de un área de la superficie corneal de diámetro de 11 mm. Estos
datos son procesados de inmediato por el software del equipo correspondiente para
analizar la elevación y curvatura tanto de la superficie anterior como de la posterior de la córnea, ası́ como para estimar la distribución de la refracción en toda la
superficie analizada, ofreciéndolos al clı́nico en forma de mapas de color, como el
mostrado por la Figura 2.36.
Los topógrafos permiten realizar diagnósticos pre-operatorios, identificar criterios
de exclusión para la cirugı́a refractiva, tales como ectasias, queratocono, prequeratocono, adelgazamiento corneal, etc. Los más sofisticados son capaces de estimar
otros parámetros de interés para el diagnóstico clı́nico, como la profundidad de la
cámara anterior o el ángulo Kappa, utilizando ultrasonidos en lugar de un sistema
Capı́tulo 2. Anatomı́a, fisiologı́a y óptica del aparato ocular humano
65
Figura 2.37: Medidas corneales tomadas por Orbscan II (Bausch&Lomb). Superior
izquierda: Topografı́a anterior. Superior derecha: Topografı́a posterior. Inferior
izquierda: Queratometrı́a o refracción. Inferior derecha: Paquimetrı́a o espesor
corneal.
óptico convencional.
A continuación se describen brevemente los diferentes mapas de color que ofrecen
estos equipos: mapas de elevación, paquimetrı́a y queratometrı́a, que se pueden
observar en la Figura 2.37.
• Mapas de elevación de superficie o topografı́a. Son mapas de la superficie anterior o posterior que permiten visualizar la irregularidad de dicha superficie.
Estos mapas indican la altura de los puntos de la superficie corneal con respecto
a una superficie de referencia, generalmente una esfera estimada como la de
mejor ajuste a la superficie (best fit sphere, BFS). Representa en tonos calientes
los puntos por encima de la esfera de referencia; en tonos frı́os, los puntos por
debajo de ella (Figura 2.36).
• Mapas de paquimetrı́a. Calculan las diferencias de elevación entre las superficies anterior y posterior de la córnea, es decir, representan el espesor corneal.
Es útil para determinar áreas delgadas que indiquen la presencia de ciertas patologı́as (por ejemplo, queratocono) o para determinar la cantidad y posición
de tejido eliminado mediante ablación LASIK ó PRK.
• Mapa queratométrico. Consiste en un mapa de dioptrı́as, calculadas a partir de
la estimación del radio de curvatura en cada punto y del ı́ndice de refracción.
Modelado del ojo humano y tratamientos refractivos
66
Figura 2.38: Imagen y modelo generado por Pentacam de Oculus.
Según el criterio utilizado para la estimación del radio, el mapa puede ser
axial o tangencial. En el caso de la queratometrı́a axial o global, el radio
de curvatura tiene su centro en el eje óptico, mientras que la queratometrı́a
tangencial o local utiliza un centro flotante, fuera del eje óptico, para un mejor
ajuste del radio de curvatura.
Existen topógrafos que incorporan una cámara de Scheimpflug rotatoria o varias
cámaras para capturar imágenes del segmento anterior del ojo. Proporcionan imágenes nı́tidas y brillantes que incluyen información desde la superficie corneal anterior
hasta la cápsula posterior del cristalino. Pentacam (Oculus) y Galilei (Ziemer )
son dos aparatos que utilizan esta tecnologı́a. El aparato proporciona la topografı́a
corneal anterior y posterior, mapas de elevación y paquimetrı́a corneal de limbo a
limbo, análisis de cámara en 3D (mapa ACD, ángulo de cámara, volumen de cámara,
etc.), densidad del cristalino, tomografı́a, etc. Una imagen tomada por Pentacam
junto con el modelo que genera puede observarse en la Figura 2.38.
Paquı́metros
Un paquı́metro es un aparato que mide el espesor corneal. El paquı́metro ultrasónico es un paquı́metro de contacto. Dispone de una sonda que, en contacto
con la córnea del paciente, estima el espesor en dicho punto. La precisión en la
medida es excelente; sin embargo, como el posicionamiento de la sonda al contactar
con la superficie corneal se realiza de forma manual, existe incertidumbre respecto
a la posición exacta del punto medido. Actualmente, la paquimetrı́a es una función
incorporada en otros equipos, como los topógrafos, que estiman el espesor corneal
Capı́tulo 2. Anatomı́a, fisiologı́a y óptica del aparato ocular humano
67
Figura 2.39: Ocular Response Analyzer, Reichert.
en cada uno de los puntos medidos de las superficies corneales anterior y posterior
sin tener contacto con la córnea del paciente.
2.3.2
Ocular Response Analyzer (ORA)
Ocular Response Analyzer (Reichert Ophthalmic Instruments, Inc., Depew, New
York), en adelante “ORA”, es un tonómetro de no-contacto que proporciona medidas de presión intraocular y de otros parámetros relacionados con las propiedades
biomecánicas de la córnea: Histéresis Corneal (CH) y Factor de Resistencia Corneal
(CRF) [Luce, 2005]. Este equipo se muestra en la Figura 2.39. Los parámetros CH
y CRF medidos por el ORA han sido definidos con la aparición del aparato, por lo
que no está todavı́a demostrada su utilidad en la diagnosis clı́nica. Sin embargo,
continuamente aparecen estudios que relacionan dichos parámetros con diversas patologı́as [Ortiz et al., 2007; del Buey et al., 2009b; Saad et al., 2009], por lo que este
equipo está adquiriendo una creciente relevancia en la investigación oftalmológica.
La medición consiste en un proceso de aplanación bidireccional dinámico, para
el cual el aparato consta de un impulsor rápido de aire y de un sistema de monitorización electro-óptica de la deformación corneal producida (Figura 2.40). Durante
el proceso, de corta duración (unos 20 milisegundos), se lanza un pulso de aire a
la parte central de la córnea que causa su desplazamiento hacia dentro, provocando
una primera aplanación, y se obtiene una primera medida tensional. La impulsión
de aire continúa aumentando hasta producir la deformación cóncava del área central
de la córnea. Cuando el pulso de aire se interrumpe, la cornea pasa por un segundo
estado de aplanación antes de retornar a su curvatura convexa normal. De esta
forma se obtienen dos valores independientes de presión intraocular determinados
en los dos instantes de aplanación. La diferencia entre estos valores tensionales es lo
que se denomina histéresis corneal y es reflejo de la viscoelasticidad de esa córnea.
El ORA utiliza el valor medido de la histéresis corneal, CH, para obtener un valor
68
Modelado del ojo humano y tratamientos refractivos
Figura 2.40: Proceso de medida realizado con el ORA.
Figura 2.41: Curva registrada mediante una medición realizada con el ORA.
de la PIO compensada (IOPcc ) independiente de la PIO obtenida con el tonómetro
de Goldmann (IOPG ) [Luce, 2005; Liu and Roberts, 2005; Kotecha et al., 2006] y
que por tanto, se supone no influenciada por las propiedades biomecánicas de la
córnea ni por su espesor.
Como resultado del proceso se obtiene un gráfico que representa la evolución
temporal de la medida (Figura 2.41). Se muestran dos curvas, la verde registra la
presión del pulso de aire y la roja indica los eventos de aplanación. Asimismo, el
aparato indica los valores numéricos que corresponden a la PIO equivalente a la
Goldman (IOPG ) , CH ,CRF , el valor de la PIO corregida (IOPcc ) con la histéresis,
y espesor de la córnea central (CCT) en el caso en que se haya realizado paquimetrı́a.
Como ya se ha comentado, el ORA ofrece la posibilidad de explorar de forma
no invasiva la viscoelasticidad de la córnea mediante la estimación de la CH, a
la que consideramos un parámetro importante a la hora de estudiar el ojo de un
paciente. Para valorar los efectos de cualquier cirugı́a en casos de ojos con patologı́as
como ectasias o queratocono deberı́amos conocer previamente su estructura y sus
propiedades biomecánicas, puesto que el efecto corrector de la cirugı́a dependerá de
las condiciones individuales de cada ojo. En esta tesis, se considera que la histéresis
puede ser tan importante como otros parámetros morfológicos (curvatura, espesor)
Capı́tulo 2. Anatomı́a, fisiologı́a y óptica del aparato ocular humano
69
por lo que la toma de medida realizada por ORA ha sido objeto de simulación
numérica para la estimación de los parámetros que caracterizan la viscoelasticidad
del tejido corneal.
La utilización de este aparato puede en un futuro alcanzar al establecimiento
de nomogramas y protocolos de actuación, desarrollo de modelos personalizados
de globo ocular patológico, en el que se definirı́a la geometrı́a mediante el estudio
topográfico y paquimétrico, y el comportamiento viscoelástico mediante el valor
de histéresis del paciente. De esta forma se podrı́a predecir el efecto de nuestra
actuación quirúrgica en casos de ojos con patologı́as que afectan a la estructura y
función de la córnea de forma individual y personalizada a cada paciente, en casos
de las patologı́as como las ya mencionadas: ectasias, queratocono, astigmatismo
irregular o córneas distróficas.
2.3.3
Otros
Microscopı́a Especular
La reflexión especular se utiliza para visualizar interfaces ópticas, permitiendo
la observación del endotelio y capa acuosa y, menos frecuentemente, del epitelio y
lágrima. Aunque en un principio los equipos de reflexión especular entraban en
contacto con la córnea, los actuales son de no-contacto. El uso de la microscopı́a
especular se ha generalizado para el estudio del endotelio corneal (cálculo de la
densidad de células, tamaño, anomalı́as en su forma, etc) de manera que se ha
hecho imprescindible a la hora de tomar decisiones sobre la cirugı́a de cataratas o en
pacientes con distrofias corneales, por lo que es un aparato habitual en la consulta
oftalmológica. También se utiliza para analizar la viabilidad de las córneas donantes
para la queratoplastia.
(a)
(b)
Figura 2.42: Imágenes tomadas por microscopı́a confocal. (a) Células endoteliales.
(b) Corte sagital del epitelio en el que se observan las diversas capas (de izquierda
a derecha): epitelio superficial, medio y basal, plexo nervioso y estroma anterior.
Modelado del ojo humano y tratamientos refractivos
70
Microscopı́a Confocal
La microscopı́a confocal permite visualizar in vivo las estructuras de todas las
capas corneales, pero su desarrollo es relativamente reciente y su uso clı́nico está aun
por generalizar. Sin embargo, el creciente interés por la cirugı́a de segmento anterior
y en particular por la cirugı́a refractiva, ha hecho crecer la acción investigadora en
esta técnica, favoreciendo su desarrollo.
La microscopı́a confocal proporciona imágenes muy claras y definidas en tiempo
real. Las ondas del láser emitido con un ancho de banda concreto se modifican al
atravesar la córnea. Debido a la dispersión y refracción de las diferentes estructuras
(citoplasma, membranas ricas en lı́pidos) una parte de la luz es trasmitida a otros
planos y otra cambia de dirección al encontrarse con zonas de distinto ı́ndice de
refracción, interviniendo en este proceso el tamaño y orientación de las partı́culas.
El diseño del microscopio confocal permite cambiar el plano confocal dentro de la
córnea y tomar imágenes a diferentes profundidades sin perder nitidez, cualquier luz
fuera del plano focal es suprimida y sólo la imagen de este plano contribuye a la
imagen. Se obtienen imágenes espectaculares (Figura 2.42), aunque por novedosas
resultan frecuentemente de dudosa interpretación, siendo por tanto algo limitadas
sus aplicaciones. Por este motivo y por su elevado coste, no es un aparato habitual
en la consulta oftalmológica.
La microscopı́a confocal se presenta como una nueva herramienta que permite
observar in vivo la histologı́a corneal y complementar las observaciones de biomicroscopı́a convencional (lámpara de hendidura), siendo un reto para el mejor entendimiento de la histopatologı́a corneal.
Tomografı́a de Coherencia Óptica (OCT)
La Tomografı́a de Coherencia Óptica (OCT) se ha convertido en una herramienta
oftalmológica de gran valor para el estudio de patologı́a, tanto retiniana como glaucomatosa y corneal, desde que fuera introducida a principios de la década de los 90.
Es una técnica de imagen no invasiva que utiliza un instrumento óptico de precisión
informatizado capaz de generar imágenes de cortes transversales (tomografı́as), que
se asemejan a los cortes histológicos in vivo. Es de aplicación en el estudio de
la patologı́a macular, glaucomatosa o retinopatı́as, ası́ como de ciertas patologı́as
corneales.
2.4
Análisis óptico de los resultados
En esta tesis se ha aplicado el método de trazado de rayos para el análisis detallado de las propiedades ópticas de la córnea tras la simulación numérica de las
diferentes técnicas de cirugı́a refractiva. Por este motivo se presenta a continuación
este método, sus bases teóricas y los resultados que proporciona.
Capı́tulo 2. Anatomı́a, fisiologı́a y óptica del aparato ocular humano
71
El método del trazado de rayos consiste en simular la trayectoria de los rayos de
luz a través de las distintas estructuras de caracterı́sticas refractivas (lentes) para
observar la dispersión respecto al foco, punto en el que los rayos deberı́an converger
en situación ideal formando una imagen nı́tida. El resultado puede variar en función
de la apertura de la pupila, que determina la cantidad de rayos que penetran en el
sistema de lentes a estudio, lo que puede provocar una mayor o menor dispersión de
la imagen formada, que afecta a la nitidez de la visión.
El trazado de rayos es hoy en dı́a una herramienta práctica muy importante en
el estudio de sistemas ópticos. A esta técnica se le denomina comúnmente óptica
geométrica.
Se comenzará por describir algunos conceptos básicos utilizados por el método,
la refracción y las aberraciones, para posteriormente exponer las bases del método.
Finalmente, se mostrarán algunos de los diagramas que se obtienen como resultado
del análisis mediante trazado de rayos.
2.4.1
Algunos conceptos básicos
Para modelar la propagación de la luz a través de sistemas ópticos se utilizan
rayos, caracterizados por su posición, dirección, amplitud, fase y, en ocasiones, por
su polarización, si la vibración electromagnética de la onda se produce en un solo
plano. Un frente de onda es una superficie imaginaria que corresponde con el lugar
geométrico en que los puntos del medio son alcanzados en un mismo instante por
una determinada onda, es decir, que comparten la misma fase. Se debe señalar que
los “rayos” o “chorros de partı́culas”, muy útiles tanto en el entendimiento intuitivo
del fenómeno como en el método computacional utilizado para el trazado de rayos,
son evidentemente inexistentes, y dichos conceptos surgen a causa de que, en el
momento del desarrollo de las teorı́as (s.XVII), sı́ se creı́a en su existencia.
En medios homogéneos e isótropos, como las lentes ópticas comunes, los rayos
son lı́neas rectas y cada rayo es normal al frente de onda local. Cuando los rayos
atraviesan medios no homogéneos, como cristales con gradiente de ı́ndice de refracción, suelen seguir trayectorias curvas y pueden no ser normales al frente de
onda. Los rayos, al atravesar superficies situadas entre medios distintos, pueden
sufrir refracción, reflexión o difracción. La interfaz entre medios distintos generalmente altera no sólo la dirección, sino también otras propiedades del rayo.
Los algoritmos basados en este método utilizan un objeto puntual emisor de
rayos, los cuales se propagan y atraviesan el sistema óptico a estudio hasta alcanzar
la superficie imagen final. La distribución resultante de amplitud, fase y polarización
de un haz de rayos puede utilizarse para predecir un amplio rango de fenómenos
ópticos.
De entre las propiedades de los rayos, las dos de mayor importancia son la
posición y la dirección. La posición viene determinada por el vector r̄ = {x, y, z},
expresado en unidades de longitud, mientras que la dirección se indica mediante
72
Modelado del ojo humano y tratamientos refractivos
el vector k̄ = {l, m, n}, en el que los valores son los cosenos directores del vector
unitario en la dirección de la trayectoria del rayo [Shannon, 1997].
Refracción, reflexión y difracción, son tres fenómenos que se producen al incidir
el rayo en una superficie limı́trofe entre dos medios. La refracción se produce según
describe la ley de Snell, citada en el apartado 2.2.1. En su forma vectorial, la ley de
Snell se expresa como:
n0 (N̄ × k̄0 ) = n(N̄ × k̄)
(2.3)
donde N̄ es el vector normal a la superficie en el punto de intersección con el rayo,
y k̄ es el coseno director del vector unitario en la dirección del rayo. Los parámetros
tras la refracción son k̄0 y n’, y antes de la refracción, k̄ y n. El ı́ndice de refracción no
interviene en la reflexión, por lo que esta expresión puede simplificarse estableciendo
n’ = -n, convenio utilizado frecuentemente en los algoritmos de trazado de rayos. De
esta forma se elimina la distinción entre refracción y reflexión, y la ley de Snell se
reduce a:
N̄ × k̄0 = −N̄ × k̄
(2.4)
Otro concepto de importancia en la caracterización de un rayo es la longitud de
trayectoria óptica, OPL (optical path length). En medios homogéneos e isótropos,
OPL se define como el producto de la distancia recorrida por el rayo, t, y el ı́ndice
de refracción del medio atravesado, n:
OP L = n × t
(2.5)
En un sistema óptico, el valor de OPL del sistema completo, desde el objeto hasta
la imagen, se obtiene mediante la suma de las OPL de todos los medios presentes
entre cada superficie óptica.
Para una mejor calidad de imagen, todos los rayos deben interceptar la imagen en
el mismo punto y en la misma fase. Por este motivo, es más conveniente considerar
la longitud de trayectoria óptica de un rayo en forma de diferencia respecto a la
OPL de un rayo de referencia, generalmente el rayo principal, que se define como el
que se propaga en la dirección del eje óptico. También es conveniente medir la OPL
como la distancia desde el objeto hasta la esfera de referencia, y no entre el objeto
y la imagen. La esfera de referencia es una superficie esférica centrada en el punto
en el que el rayo principal intersecta la superficie imagen. El radio de la esfera de
referencia se define por la distancia entre la superficie imagen y la salida de pupila
paraxial.
A la diferencia entre las OPL de un rayo respecto al rayo principal de referencia
se le denomina diferencia óptica de la trayectoria (OPD):
OP D = OP Lrayo − OP Lprincipal
(2.6)
En esta expresión, ambos valores de OPL están medidos desde el objeto hasta
la esfera de referencia. El OPD es el parámetro que se representa en los gráficos de
Capı́tulo 2. Anatomı́a, fisiologı́a y óptica del aparato ocular humano
73
Figura 2.43: Cualquier aberración, por compleja que sea, puede descomponerse
como una suma de modos que aparecen en mayor o menor proporción. Los modos
de aberración se clasifican en órdenes y dentro de cada orden pueden presentar
distintas simetrı́as. Cuanto mayor es el orden, mayor la complejidad y el número de
simetrı́as posibles.
trayectoria óptica, y pueden ser utilizados para reconstruir el frente de onda a partir
de los rayos, calculando ası́ las aberraciones del frente de onda.
Un solo rayo no es adecuado para modelar un frente de onda. En su lugar, se utiliza un haz de rayos. La forma más utilizada de haz de rayos es la rejilla rectangular,
siendo tamaños tı́picos de 32×32, 64×64, 128×128, etc. Cuanto mayor es el tamaño
de pupila, mayor es la precisión del cálculo pero mayor el coste computacional, pues
se trabaja con mayor cantidad de datos.
2.4.2
Aberraciones
Aberración es un término derivado del latı́n aberratio, que significa “salirse del
camino o desviarse”. Una lente perfecta debe producir un haz de luz esférico perfecto, de forma que todos los rayos de luz que pasan por la pupila converjan hacia
el centro de esa esfera, el foco. La diferencia entre el frente de onda real con aberraciones y el frente de onda esférico ideal se denomina aberración de onda. Cuanto
menores sean las aberraciones, más parecido será el frente de onda a una superficie
esférica, y viceversa.
En particular, para el ojo humano, cuando un frente de onda plano procedente de
un objeto distante llega a un ojo emétrope ópticamente perfecto, sin aberraciones,
todos los rayos convergen en un solo punto en la retina y el frente de onda reflejado
que emerge de dicho sistema será igualmente plano; es el plano de referencia. Por el
contrario, cuando un frente de onda plano llega a un ojo con aberraciones, el frente
de onda resultante será ondulante o con aberraciones y forma imágenes borrosas.
En aberrometrı́a, al igual que en topografı́a corneal (ver descripción de los mapas
74
Modelado del ojo humano y tratamientos refractivos
topográficos en el apartado 2.3.1) se resta al frente de onda real la esfera de referencia, obteniendo como diferencia la aberración de onda. Esta aberración puede
ser muy variada, pero siempre puede descomponerse como una suma de modos que
aparecerán en mayor o menor proporción. Esa proporción es el valor de cada aberración. Los modos de aberración se clasifican en órdenes y dentro de cada orden pueden
presentar distintas simetrı́as. Cuanto mayor es el orden, mayor la complejidad y
el número de simetrı́as posibles. La Figura 2.43 muestra la descomposición de la
aberración total en modos correspondientes a distintos órdenes.
El primer orden de aberración corresponde al modo prismático, y únicamente
presenta dos simetrı́as, que son el prisma horizontal y el vertical. Es decir, el primer
orden se corrige con prismas, que son elementos ópticos de caras planas. Las aberraciones de primer orden, aunque no se pueden medir con aberrómetros convencionales,
no tienen ningún impacto en la calidad de imagen.
El segundo orden es aquel que se corrige con lentes convencionales, esféricas o
cilı́ndricas, y corresponden a las ametropı́as clásicas, que son el desenfoque y el
astigmatismo (de segundo orden). El ojo humano normal presenta todo tipo de
aberraciones, aunque su magnitud disminuye muy rápidamente con el orden, de
manera que que el segundo orden representa, aproximadamente, dos tercios de la
aberración total, siendo muy fácil de corregir con lentes.
El tercer orden, coma y trefoil (o trébol), suele tomar valores importantes, ası́
como algunas aberraciones de cuarto orden, como la esférica y el astigmatismo
secundario. Las aberraciones de órdenes más altos suelen tomar valores despreciables
en ojos normales. La forma que adopta la aberración de onda para cada uno de estos
modos se muestra en la Figura 2.43.
La representación de las aberraciones de frente de onda se realiza habitualmente
mediante la utilización de polinomios de Zernike. Los polinomios de Zernike son
un conjunto infinito de funciones polinómicas, ortogonales en el cı́rculo de radio
unidad, por lo que son muy útiles para representar la forma del frente de onda en
sistemas ópticos, en los que se utiliza pupilas circulares. Su uso está muy extendido
y es frecuente su expresión en distintas notaciones, normalizaciones y criterios en la
asignación de signos.
Los polinomios de Zernike se expresan habitualmente en coordenadas polares,
siendo φ la componente azimutal (valores pertenecientes al intervalo [0, 2π], en
radianes) y ρ la componente radial normalizada (valores en el intervalo [0,1]). Los
polinomios de Zernike pares se definen como:
Znm (ρ, φ) = Rnm (ρ) cos(m φ)
(2.7)
Zn−m (ρ, φ) = Rnm (ρ) sin(m φ),
(2.8)
y los impares:
donde m y n son enteros no negativos con n ≥ m; n indica el orden de la componente
radial y m, la frecuencia azimutal. Los polinomios radiales Rnm no tienen dependencia
Capı́tulo 2. Anatomı́a, fisiologı́a y óptica del aparato ocular humano
j
ı́ndice
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
n
orden
0
1
1
2
2
2
3
3
3
3
4
4
4
4
4
m
frecuencia
0
-1
1
-2
0
2
-3
-1
1
3
-4
-2
0
2
4
75
Zn
m (ρ, φ)
1
2ρsenφ
√ 2ρcosφ
2
√ 6ρ sen2φ
2 − 1)
√3(2ρ
2 cos2φ
6ρ
√ 3
8ρ sen3φ
√
3 − 2ρ)senφ)
8(3ρ
√
3
8(3ρ
√ 3− 2ρ)cosφ)
√ 8ρ 4cos3φ)
10ρ sen4φ
√
4 − 3ρ2 )sen2φ
10(4ρ
√
4
2
√ 5(6ρ4 − 6ρ2 + 1)
10(4ρ
−
3ρ
)cos2φ
√
10ρ4 cos4φ
Tabla 2.1: Polinomios de Zernike hasta 4o grado y sus correspondientes valores de
los ı́ndices j, n y m.
azimutal y se definen como:
(n−m)/2
Rnm (ρ)
=
X
k=0
(−1)k (n − k)!
ρn−2 k
k! ((n + m)/2 − k)! ((n − m)/2 − k)!
(2.9)
en caso de que n − m sea par. Si n − m es impar:
Rnm (ρ) = 0
(2.10)
Además de el orden n y la frecuencia m, también se identifica a cada uno de los
polinomios por medio de un único indexado j, que está relacionado con los ı́ndices
n y m por medio de la siguiente relación:
j=
n(n + 2) + m
2
(2.11)
La Tabla 2.1 muestra los polinomios de Zernike hasta orden 4 y sus correspondientes ı́ndices j, n (orden) y m (frecuencia azimutal).
La aberración total del frente de onda se representa como combinación lineal de
los polinomios de Zernike, mediante la función aberración de onda, W (ρ, φ), :
X
W (ρ, φ) =
[Cj (ρ, φ) · Zj ]
(2.12)
j=1,...,N
donde Cj son los coeficientes de Zernike que se expresan en micras y miden el valor
de las distintas aberraciones presentes en el sistema.
Cualquier frente de onda, por muy complejo que sea, puede ajustarse mediante polinomios de Zernike. El ajuste proporciona el conjunto de coeficientes que,
76
Modelado del ojo humano y tratamientos refractivos
Figura 2.44: Polinomios de Zernike correspondientes a cada modo de aberración. El
subı́ndice indica el orden de aberración, y el superı́ndice, la simetrı́a.
individualmente, representan los diferentes tipos de aberraciones que componen el
frente de onda en cuestión. Los coeficientes de Zernike son linealmente independientes, por lo que la contribución de cada aberración individual a la aberración total
del frente de onda puede aislarse y cuantificarse de forma independiente. La Figura
2.44 muestra la relación entre cada polinomio de Zernike y el correspondiente modo
de aberración, hasta 5o orden.
El error del frente de onda puede presentarse como el error cuadrático medio
RMS (Root Mean Square) que es desviación de un frente de onda perfecto respecto al
real. A menor RMS, mejor es el frente de onda real. El RMS adopta valores siempre
positivos y se mide en micras. Se considera una medida objetiva de cuantificación
de la calidad visual a nivel del plano pupilar. Puede analizarse desde el contexto
de sumatorio de todas las aberraciones de un sistema, entonces se denomina RMS
total, o desde únicamente las aberraciones de alto orden, en cuyo caso se describe
como RMS HO.
2.4.3
El método de trazado de rayos
El método de trazado de rayos es una técnica basada en el modelado de la
propagación de la luz a través de un sistema óptico, técnica denominada comúnmente
“óptica geométrica” [Born and Wolf, 1999]. En particular, el trazado secuencial de
rayos consiste en trazar rayos a través de una secuencia predefinida de superficies,
desde la superficie objeto hasta la superficie imagen. Los rayos impactan en cada
Capı́tulo 2. Anatomı́a, fisiologı́a y óptica del aparato ocular humano
77
superficie una sola vez, y en el orden (secuencia) en que están definidas dichas
superficies. Esta metodologı́a permite obtener fácilmente las aberraciones de frente
de onda.
Todo sistema óptico tiene un sistema de apertura, que representa el diámetro
de entrada de rayos o diámetro de pupila. Con él se establece el tamaño de el
haz, alineado con el eje óptico, que el sistema óptico recibe procedente del objeto.
La óptica paraxial permite realizar aproximaciones basadas en un trazado de rayos
que se realiza en el lı́mite de ángulos y alturas muy pequeños. Esta hipótesis permite realizar algunas simplificaciones que hacen la aritmética del trazado de rayos
considerablemente más fácil.
Las aproximaciones realizadas en óptica paraxial son las siguientes:
1. Según la ley de Snell, la ecuación de refracción entre dos medios es:
n · senq = n0 · senq 0
(2.13)
siendo n, q referidos al medio anterior a la refracción, y n’ y q’, al medio tras
la refracción. Para ángulos pequeños, sen q ≈ q, y la ley de Snell resulta:
n · q = n0 · q 0
(2.14)
Muchas definiciones en Óptica se basan en esta simplificación, dando lugar
al término “óptica de primer orden”. Las aberraciones son de tercer orden o
superior, puesto que al aumentar el ángulo de incidencia q, el valor del seno
aumenta de orden:
q3 q5
+
− ...
(2.15)
senq ≈ q −
3!
5!
Las propiedades paraxiales de los sistemas ópticos se consideran frecuentemente las que el sistema tiene en ausencia de aberraciones.
2. Puesto que la altura del rayo es pequeña, se puede despreciar la curvatura de
las superficies. De esta forma, se realiza el trazado de rayos entre superficies
planas de potencia equivalente. La potencia de una superficie de curvatura C
entre dos ı́ndices n y n’ es:
j = (n0 − n) · C
(2.16)
Al despreciar la curvatura, el coste computacional disminuye, puesto que no se
ha de realizar el cálculo del punto exacto de impacto del rayo en la superficie.
3. La tangente del ángulo de incidencia del rayo puede reemplazarse por el propio
ángulo. Esta suposición puede no ser evidente, pero resulta fundamental. Si
se considera un rayo paraxial trazado entre dos superficies planas, el rayo tiene
una altura inicial y en la primera superficie, y se caracteriza por los cosenos
78
Modelado del ojo humano y tratamientos refractivos
directores en y- y z-, {m,n}. Su altura y’ en la siguiente superficie viene dada
por:
m
)·t≈y+q·t
(2.17)
n
puesto que no sólo sen q ≈ q, sino que además tan q ≈ q. La consecuencia
fundamental es que la pendiente de un rayo paraxial es igual al propio ángulo.
y 0 = y + tanq · t = y + (
Como se hace evidente con estas tres simplificaciones, la óptica paraxial permite
un cálculo mucho más sencillo del trazado de rayos. Sin embargo, no sólo debe
ser considerado como una herramienta de simplificación de coste computacional;
además, representa las propiedades limitantes de sistemas con simetrı́a de rotación
compuestos por superficies esféricas.
Para aplicaciones más generales se utiliza la aproximación parabasal, que consiste en trazar rayos con un pequeño ángulo respecto al eje óptico. Son más reales
en el sentido de que se aplica la forma completa de la ley de Snell, por lo que el rayo
interactúa con la curvatura real de la superficie, no en un plano de potencia equivalente, y no se hacen aproximaciones en el trazado de rayos. De esta forma, se pierden
las ventajas a nivel computacional que presenta la aproximación paraxial, pero se
representa de forma más precisa la actuación limitante de un sistema conforme la
apertura tiende a cero. En particular, se pueden considerar superficies inclinadas,
descentradas, con simetrı́a de no-revolución, etc. La aproximación paraxial se sigue
utilizando como referencia para comparar los cálculos realizados con rayos reales.
Una vez realizado el trazado de rayos, las aberraciones pueden describirse utilizando
distintas representaciones gráficas. La Figura 2.45 muestra algunas de ellas.
Como resultado del análisis de trazado de rayos, se obtiene la distribución de la
irradiación emitida por un punto objeto en el espacio a través del frente de onda
captado, denominada el PSF (Point Spread Function). Cuanto más semejante a un
punto, menor es la aberración del frente de onda. Aunque el objeto es un punto,
la imagen no lo es a causa de la dispersión. Existen dos causas de dispersión: por
una parte, las aberraciones en el sistema óptico producen una dispersión en un área
finita en torno a la imagen; por otra, los efectos de difracción producen dispersión,
aún en el caso de que el sistema no tenga aberraciones.
El diagrama de impacto, que se muestra en la Figura 2.45 izquierda, representa la
distribución del impacto de los rayos en el plano imagen, trazados desde la superficie
objeto a través de la apertura de pupila. Cada punto representa el impacto de un
rayo. El diagrama de impacto permite visualizar los efectos de las aberraciones
geométricas; sin embargo, este diagrama únicamente representa el PSF geométrico,
es decir, no considera la difracción.
Una forma de establecer las aberraciones geométricas de un sistema óptico es
utilizar la aberración de rayo. El conjunto de aberraciones de todos los rayos constituye la aberración de frente de onda. La Figura 2.45 central muestra la aberración
Capı́tulo 2. Anatomı́a, fisiologı́a y óptica del aparato ocular humano
79
Figura 2.45: Representación de la aberración esférica. Izquierda: Diagrama de
impacto. Centro: Aberración de rayo y de frente de onda. Derecha: Gráfico de
aberración longitudinal.
de frente de onda, que se desvı́a de su esfera de referencia perfecta, adquiriendo
mayor curvatura en el extremo. Como resultado, los rayos marginales alcanzan un
foco más cercano que los rayos centrales, estableciendo la aberración de rayo. La
distancia desde el foco de los rayos con aberración al foco correcto constituye la
aberración longitudinal, y la altura radial del rayo con aberración en el plano imagen, constituye la aberración transversal. En esta imagen, ambos son negativos; el
primero está orientado hacia la izquierda y el último tiene el radio al lado opuesto
que el radio de pupila de origen.
La Figura 2.45 derecha representa el gráfico de aberración longitudinal (aberración esférica). Al igual que los diagramas de impacto, se representa la aberración
longitudinal como función de la altura del rayo en la pupila. Como se puede observar,
la aberración longitudinal cambia con el cuadrado de la altura zonal, por lo que el
70% de los rayos enfoca muy cerca del punto medio de el área de dispersión de la
aberración longitudinal.
Hoy en dı́a, la principal herramienta para el estudio y diseño de lentes, espejos
y sistemas ópticos (cámaras fotográficas, telescopios, etc) es la óptica geométrica.
Además, el método de trazado de rayos es una técnica de gran aplicación en el campo
de la Optometrı́a y de la Oftalmologı́a.
Existe una gran inquietud por reproducir la óptica del ojo humano mediante
modelos ópticos. Se han creado modelos ópticos personalizados con el fin de analizar
la refracción de un paciente determinado [Goncharov et al., 2008; Wei and Thibos,
2008], mediante la reproducción en el modelo de la geometrı́a de córnea y cristalino
a partir de la topografı́a, la paquimetrı́a y la imagen OCT tomadas del paciente.
De esta forma, se realizan estudios para analizar las aberraciones corneales o de
cristalino [Smith et al., 2008], o las aberraciones inducidas por cirugı́a refractiva
80
Modelado del ojo humano y tratamientos refractivos
[Arba-Mosquera and De-Ortueta, 2009; Wang et al., 2007] con el fin de poder minimizar el efecto causado y mejorar la calidad visual postquirúrgica.
Otra aplicación directa del método de trazado de rayos es la relacionada con las
lentes intraoculares, tanto en el diseño de nuevas lentes, como para el cálculo de su
potencia óptima para cada caso [Jin et al., 2009].
Capı́tulo 3
Tratamientos refractivos
Esta tesis tiene como objetivo realizar aportaciones a la práctica clı́nica, desde
el punto de vista de la Biomecánica, relativas a diversos tratamientos refractivos.
En este capı́tulo se exponen las cirugı́as consideradas para su análisis mediante
simulación numérica, cuyas simulaciones se presentan en el Capı́tulo 6.
Este capı́tulo comienza describiendo brevemente la historia de la cirugı́a refractiva. Posteriormente, se describen algunas técnicas refractivas actuales, como la
cirugı́a de la catarata mediante facoemulsificación, la cirugı́a incisional para la corrección del astigmatismo y la cirugı́a refractiva con láser excı́mer, que engloba ténicas
conocidas, como PRK o LASIK. Finalmente, se presenta la patologı́a denominada
queratocono, cuyo tratamiento es de creciente interés en la actualidad oftalmológica.
Una vez descrita la patologı́a, se presentan los dos tratamientos disponibles en la
actualidad, aplicados individualmente o de forma combinada, que son el implante
de segmentos de anillos intraestromales y el cross-linking de colágeno corneal.
3.1
Breve historia de la cirugı́a refractiva
Las técnicas quirúrgicas de corrección de los defectos refractivos han sufrido
una gran evolución, desde que comenzaran a aplicarse sobre córneas humanas. En
este apartado se expone brevemente la historia de las técnicas de cirugı́a refractiva
desde que comenzara a plantearse la posibilidad de corregir los defectos de refracción
mediante la manipulación de la córnea, hasta la irrupción hace unos pocos años de
la tecnologı́a láser en la cirugı́a refractiva.
Gracias a ésta y otras innovaciones tecnológicas, se ha ganado en efectividad,
minimizando el tiempo de la cirugı́a y obteniendo resultados más precisos, ası́ como
disminuyendo los riesgos de la intervención y haciendo más sencilla y rápida la recuperación del paciente después de la cirugı́a.
Los precursores de la cirugı́a refractiva actual
El estudio de los problemas visuales producidos por errores refractivos comenzó
a principios del siglo XVI, cuando Leonardo da Vinci intuyó una forma de corregir
81
82
Modelado del ojo humano y tratamientos refractivos
errores refractivos. Utilizó un recipiente con agua situado delante del ojo, con lo
que se lograba anular a la córnea como superficie refractiva.
Sin embargo, no se produjo un verdadero progreso en el campo de la corrección
visual hasta que se adquirió un mejor conocimiento de cómo se produce el proceso
de visión en el ojo humano.
Posteriormente se introdujo el uso de la anestesia tópica, lo que llevó al desarrollo de la cirugı́a de la catarata. En 1.867, con el desarrollo del queratómetro
para medir la curvatura de la córnea, los cirujanos fueron capaces de medir el astigmatismo provocado por la cirugı́a de catarata. En 1.869 Herman Snellen propuso
la realización de incisiones en el meridiano de mayor curvatura de la córnea para
aplanarla y reducir de este modo el astigmatismo. Habrı́an de pasar 21 años antes
de que se retomara la idea de modificar la curvatura corneal. En 1.890, Galezowski
practicó el método de resección de una porción semilunar de tejido corneal, sin éxito
[Belmonte, 2005].
No mucho tiempo después, una exitosa técnica de cirugı́a de la catarata fue desarrollada por Albrecht Von Graefe en la década de 1.850 a 1.860, momento en el
que los oftalmólogos comenzaron a darse cuenta de la influencia de la curvatura de
la córnea en la aparición del astigmatismo [Kohnen, 2000]. Fue aproximadamente en
esta época cuando el fı́sico holandés Leendert Jan Lans, que trabajaba en su tesis
doctoral, comenzó el estudio sistemático de cirugı́a refractiva mediante incisiones
corneales no perforantes en animales y realizó la definición de los principios básicos
de la queratotomı́a [Belmonte, 2005]. Sus investigaciones alcanzaron tal relevancia
que pronto se convirtieron en el procedimiento estándar de la cirugı́a refractiva. Sus
estudios generalizaron los principios de aplanamiento de la córnea que podı́a ser
alcanzado mediante la práctica de incisiones en la superficie anterior de la misma.
Variando el número, la dirección y la forma, era posible controlar el efecto que producı́an las incisiones, provocando la corrección del astigmatismo. Además de las
técnicas quirúrgicas, se realizaron otros intentos al margen de la cirugı́a para tratar
de manipular la forma del ojo. Uno de los métodos consistı́a en un recipiente en
forma de copa controlado por un resorte, que ejercı́a presión sobre el globo ocular,
provocando el aplanamiento de la córnea; otro consistı́a en una goma que reducı́a
la curvatura corneal. Pero estas técnicas lograban un grado insignificante de corrección visual. A excepción del trabajo de Lans, entre 1.885 y 1.939 fue un periodo
de prueba y error para la cirugı́a refractiva. Los fracasos y éxitos de este periodo
contribuyeron significativamente a discernir entre los procedimientos que proporcionaban resultados positivos y los que no.
La cirugı́a refractiva moderna
En 1.936, el japonés Tsutomu Sato observó el aplanamiento espontáneo de
la córnea en un paciente con queratocono, tras la rotura de la membrana de Des-
Capı́tulo 3. Tratamientos refractivos
83
Figura 3.1: El microqueratomo, imagen izquierda, es un aparato utilizado para
realizar el corte del flap corneal según el mecanismo mostrado en la imagen derecha.
cemet, por lo que comenzó una extensa investigación experimental del efecto de
las incisiones en la cara posterior corneal, radiales y astigmáticas. Basándose en
los principios enunciados por Lans casi un siglo y medio antes, demostró la validez
de la queratotomı́a radial para lograr el aplanamiento corneal. Sato introdujo el
concepto de acoplamiento, según el cual, al realizar las incisiones astigmáticas no
sólo se aplana el meridiano más curvo, sino que se incurva el más plano. Realizó
queratotomı́a anterior y posterior, ası́ como incisiones perforantes cerca del limbo.
Las incisiones en la cara posterior corneal terminaron por descartarse, al causar un
evidente daño al endotelio. Sin embargo, la aportación de Sato marcó el comienzo de
la moderna cirugı́a refractiva [Belmonte, 2005]. Posteriormente, otros oftalmólogos
continuaron practicando la técnica incisional, obteniendo resultados similares.
En 1.948 Ridley, un fı́sico empleado por la Royal Air Force inglesa durante la
Segunda Guerra Mundial, se percató de que los pilotos que sufrı́an la inclusión en sus
ojos de pequeños fragmentos de polimetilmetacrilato procedente de las carlingas de
los aviones, no experimentaban reacción alguna de rechazo a este material extraño.
Esto le llevó a suponer que una pequeña lente, hecha del mismo material e introducida en el interior del ojo, serı́a probablemente tolerada por el mismo. Pronto
comenzó a experimentar con diferentes diseños de lentes de plástico, naciendo de
esta manera la era de los implantes de lentes intraoculares para la corrección de la
catarata.
Al mismo tiempo en que Ridley comenzó a desarrollar los implantes intraoculares, José Ignacio Barraquer desarrolló en su clı́nica de Colombia la cirugı́a lamelar
corneal para alterar la forma de la córnea. Barraquer describió los principios de
la cirugı́a lamelar para la corrección de la miopı́a, mediante la inducción de un
aplanamiento corneal por eliminación de tejido de la superficie anterior, con un
instrumento llamado microqueratomo (Figura 3.1), enfriándola hasta temperaturas
bajas y actuando sobre ella con un torno mecánico. También planteó la realización
de injertos lamelares tallados sobre una base tórica para la corrección de astigma-
84
Modelado del ojo humano y tratamientos refractivos
Figura 3.2: Queratotomı́a radial. Las incisiones radiales inducen un aplanamiento
corneal que corrige la miopı́a (imagen de M. Erickson, JirehDesign.com).
tismos; posteriormente, en 1.965, propuso la resección semilunar [Belmonte, 2005].
La técnica de cirugı́a lamelar alcanzó su máximo desarrollo a mediados de la
década de los 80, gracias a la automatización del procedimiento. En 1.985, Casimir
Swinger desarrolló un nuevo método para cambiar la forma de la córnea sin tener
que enfriarla, usando sólo el microqueratomo. Posteriormente, en 1.987 Luis A.
Ruiz, discı́pulo de Barraquer, modificó los principios de funcionamiento del microqueratomo usando un sistema automatizado del instrumento para poder realizar la
incisión directamente sobre el ojo. Este procedimiento, conocido como queratoplastia lamelar automatizada (ALK, Automated Lamellar Keratoplasty), se aplicó para
la corrección de niveles elevados tanto de miopı́a como de hipermetropı́a [Kohnen
and Koch, 2005].
A partir de 1.970, algunos oftalmólogos rusos comenzaron a investigar con el
objetivo de determinar si la queratotomı́a radial (RK, Radial Keratotomy), basada
en la realización de incisiones rectas en la superficie anterior corneal en dirección
radial, con el fin de lograr su aplanamiento y corregir la miopı́a (Figura 3.2). De
esta forma, se podı́an evitar los problemas que presentaban la agresión endotelial
durante las queratotomı́as posteriores practicadas por Sato. A mediados de los
70, los cientı́ficos rusos Durney, Yenaleyev y Fyodorov determinaron que el efecto
de aplanamiento podı́a ser obtenido realizando dieciséis o menos incisiones en la
superficie anterior de la córnea. Fyodorov desarrolló una forma de RK anterior
que, mediante la variación del número de incisiones radiales y tranversas le permitı́a
controlar cuidadosamente el grado de corrección visual, reduciendo o eliminando el
astigmatismo miópico [Belmonte, 2005].
El primer paso en la evolución de la cirugı́a refractiva tuvo lugar cuando se
comenzó a investigar la aplicación de la tecnologı́a láser a la corrección de problemas
visuales. En 1.980 Hugh Beckman y Gholam A. Peyman usaron un láser de dióxido
de carbono para provocar una contracción térmica en la córnea y, de este modo,
variar la curvatura de su superficie [Beckman et al., 1980; Peyman et al., 1980].
Capı́tulo 3. Tratamientos refractivos
85
Un año después, en 1.981, John Taboada informó en una reunión de la Aerospace
Medical Association de que el láser excı́mer de fluoruro de argón presentaba el inconveniente de erosionar el tejido del ojo. A partir de ese momento, los trabajos
se orientaron al desarrollo de la ablación o eliminación microquirúrgica de tejido
corneal para aplanar la superficie de la misma. Su evaluación posterior fue llevada a
cabo por Steve Trokel. La primera vez que se utilizó el láser excı́mer en humanos fue
sobre una persona ciega en 1.985, por el alemán Theo Seiler. Este primer ensayo fue
continuado en 1.987 por Francis A. L´Esperance en los Estados Unidos. Esta nueva
técnica se llamó queratectomı́a fotorrefractiva o PRK (Photorefractive keratectomy)
y consistı́a en realizar la ablación de la superficie de la córnea para reducir la curvatura de la parte central corrigiendo ası́ problemas de miopı́a. Entre 1.990 y 1.991
Ioannis G. Pallikaris y Lucio Buratto combinaron el corte lamelar que se realizaba
usando el bisturı́ de un microqueratomo para hacer la incisión corneal, basado en el
trabajo pionero que Barraquer habı́a realizado cuarenta años antes, con la ablación
realizada mediante el láser excı́mer de la superficie anterior corneal [Pallikaris et al.,
1990, 1991; Buratto et al., 1993]. Fue Pallikaris quien acuñó el término LASIK (Laser
Assisted In-Situ Keratomileusis). Este procedimiento añadió al moderadamente exitoso procedimiento de la queratoplastia lamelar, ALK, la tremenda exactitud que
proporciona el láser excı́mer, aportando mayor precisión a la corrección lograda por
la cirugı́a.
3.2
3.2.1
Técnicas quirúrgicas refractivas actuales
La cirugı́a de la catarata
La principal enfermedad ocular en paı́ses en vı́as de desarrollo es la catarata.
Afecta a 25 millones de personas en el mundo y es responsable del 50% de la ceguera
mundial, según informó Robert Walters, presidente de la fundación Orbis en Reino
Unido, en el XXVII Congreso de la European Society of Cataract and Refractive
Surgery, Barcelona, 2.009. La catarata consiste en una opacificación del cristalino,
cuya evolución conduce a la ceguera total del ojo. Puede aparecer a distintas edades:
la catarata congénita se presenta en niños; en adolescentes y adultos jóvenes la más
frecuente es la traumática, por golpe o introducción de un cuerpo extraño en el ojo
que alcanza el cristalino. La más común es la catarata senil, que se produce de
manera natural a edad avanzada. Algunas enfermedades, bien generales, bien del
ojo, pueden causar también catarata.
La técnica quirúrgica utilizada actualmente es poco invasiva, rápida, relativamente económica (dependiendo de la lente intraocular que se implante) y efectiva.
El tratamiento de la catarata ha experimentado una sorprendente evolución desde
que ya en el Antiguo Egipto se documentara por primera vez esta patologı́a (Figura
3.3). La palabra catarata procede de la palabra griega κατ αρρακτ ηζ que significa
“caı́da de agua”, en clara referencia a la percepción de aquél que la sufre, como si
86
Modelado del ojo humano y tratamientos refractivos
Figura 3.3: Busto de Ka-âper [Ascaso et al., 2001], perteneciente al Imperio Antiguo
(2467-2457 a.C.), de la dinastı́a V, caso documentado más antiguo de catarata. El
reflejo blanco en la pupila del ojo izquierdo, unilateral, en un hombre de avanzada
edad indica la presencia de una catarata madura.
viera a través de una cortina de agua.
El reciente progreso del tratamiento quirúrgico de esta patologı́a ha sido sorprendente. La primera técnica que se utilizó fue la denominada extracción intracapsular,
la cual consistı́a en la extracción de todo el cristalino, incluyendo la cápsula, y su
función refractiva no era reemplazada, o en algunas ocasiones se implantaba una
lente de cámara anterior. Esta técnica evolucionó posteriormente a la extracción
extracapsular de cristalino, cirugı́a que consiste en realizar una incisión grande (7-9
milı́metros) en la periferia corneal; abrir la cápsula anterior y extraer la catarata
de una pieza, preservando la cápsula posterior del cristalino. A continuación se introduce una lente en el saco capsular y posteriormente, se sutura la herida. Hasta
hace pocos años, las lentes intraoculares eran rı́gidas, por lo que la incisión debı́a ser
grande para poder introducirlas. La técnica de extracción extracapsular de cristalino presentaba algunos inconvenientes, como cierta dificultad de maniobra durante
la cirugı́a, la pérdida de presión en la cámara anterior, postoperatorio un poco más
prolongado que el actual y mayor posibilidad de generar cierto astigmatismo a causa
del tamaño de la incisión.
Algunos avances tecnológicos lograron revolucionar la cirugı́a de la catarata.
En primer lugar, se desarrolló un aparato, el facoemulsificador, que mediante la
emisión de ultrasonidos localizada en su extremo permite destruir la catarata sin
dañar las estructuras vecinas. Este aparato dispone de un sistema de irrigación
y aspiración, que permite mantener la presión en la zona de trabajo mientras se
aspiran los fragmentos del interior del cristalino. Con la facoemulsificación ya no
es preciso realizar grandes incisiones puesto que no se extrae la catarata en bloque
Capı́tulo 3. Tratamientos refractivos
87
Figura 3.4: El facoemulsificador destruye la catarata mediante ultrasonidos, aspirando los restos e irrigando para mantener la presión en cámara anterior (izquierda).
Introducción de una lente intraocular en el saco capsular tras eliminar la catarata
(derecha).
Figura 3.5: Proceso de cirugı́a de la catarata mediante facoemulsificación. Se realiza
la incisión perforante (izquierda), por la que se introduce el facoemulsificador, que
elimina mediante ultrasonidos el interior del cristalino opacificado por la catarata
(centro). Finalmente, se introduce en el saco capsular la lente intraocular, previamente calculada según la refracción del paciente (derecha).
(actualmente, las incisiones son de unos 2,2-3,2 milı́metros). Como se puede observar
en la Figura 3.4, tras la eliminación de la catarata por el facoemulsificador, la función
refractiva del cristalino es desempeñada por una lente intraocular, que se implanta
mediante un inyector en el que se introduce la lente plegada; el inyector penetra
por la misma incisión que previamente ha sido utilizada por el facoemulsificador, y
tras ser introducida en el saco, la lente se despliega y adopta su posición correcta,
acomodándose al interior del saco capsular.
La aparición del facoemulsificador y de lentes intraoculares plegables ha permitido que las incisiones puedan ser más pequeñas y se elimine la necesidad de suturar
la herida. De esta forma, se pasó de la cirugı́a intracapsular a la cirugı́a extracapsular
con implante de lente intraocular; del ingreso hospitalario a la cirugı́a ambulatoria;
de la anestesia general a la anestesia tópica; de la extracción del núcleo por una
amplia incisión a la facoemulsificación con pequeña incisión y sin sutura.
Actualmente, la cirugı́a refractiva de la catarata engloba un conjunto de actua-
88
Modelado del ojo humano y tratamientos refractivos
ciones que tienen como objetivo conseguir la emetropı́a. A la hora de abordar la
planificación quirúrgica, el cirujano debe considerar aspectos como la elección de la
lente intraocular (monofocal o multifocal), cálculo de su refracción, la realización
de incisiones anastigmáticas y queratotomı́as relajantes, etc. con el objetivo no sólo
de eliminar la catarata, sino también de que el paciente quede satisfecho con su
refracción.
La Figura 3.5 muestra varios instantes de una intervención actual de cirugı́a de la
catarata mediante facoemulsificación. La selección de la lente intraocular (potencia
óptica, monofocal o multifocal, etc) la realiza el cirujano durante la planificación
quirúrgica, considerando la refracción y las condiciones del paciente en particular.
Como se ha indicado, la cirugı́a de la catarata en la actualidad tiene por objeto
no sólo la eliminación de la catarata, sino también alcanzar la emetropı́a. Para ello
se debe tener en cuenta el efecto astigmático de la incisión penetrante realizada
para la facoemulsificación e introducción de la lente. En ocasiones, si se practica
esta incisión en el eje de mayor poder refractivo, puede por sı́ misma corregir el
astigmatismo previo del paciente. Si el astigmatismo preoperatorio es superior a
1 D, o si el cirujano tiene mejor accesibilidad al practicar la incisión en posición
temporal, pueden realizarse incisiones relajantes que compensen o añadan su efecto
al de la incisión de la cirugı́a de catarata, logrando, de esta forma, la corrección del
astigmatismo prequirúrgico. En el Capı́tulo 6 se presentan simulaciones numéricas
de incisiones relajantes para la corrección del astigmatismo, que pueden realizarse a
la vez que la cirugı́a de la catarata. La técnica quirúrgica incisional para corrección
del astigmatismo se expone en el siguiente apartado.
3.2.2
Cirugı́a incisional para corrección del astigmatismo.
El astigmatismo, como se explica en el Capı́tulo 2, es un error refractivo causado
por la falta de esfericidad de la morfologı́a corneal, lo que provoca que la potencia
óptica no sea uniforme en todos los meridianos. Afecta aproximadamente a un 54%
de la población española adulta, frente a un 25% y un 44% de miopı́a e hipermetropı́a, respectivamente [Antón et al., 2009], pudiendo ambas presentarse asociadas a
cierto grado de astigmatismo. Las técnicas de cirugı́a refractiva, en general, se basan
en la modificación de la curvatura corneal con el fin de alterar su refracción, logrando
corregir los errores refractivos del ojo. En particular, el astigmatismo corneal puede
ser corregido si se modifica la morfologı́a corneal de forma que se logre la esfericidad.
Con el fin de conseguir la emetropı́a, se pueden realizar ciertas incisiones corneales
para la corrección de miopı́a (queratotomı́a radial) o del astigmatismo (incisiones
relajantes). Las incisiones relajantes para corrección del astigmatismo están frecuentemente asociadas a la cirugı́a de la catarata, aunque también son muy útiles
en casos de astigmatismos postquirúrgicos tras queratoplastia, extracciones extracapsulares de la catarata y en algunos casos de astigmatismos congénitos.
La Figura 3.6 muestra un balón de baloncesto y uno de rugby. El balón de
Capı́tulo 3. Tratamientos refractivos
89
Figura 3.6: La cirugı́a incisional, en una córnea astigmática cuya morfologı́a es similar a un balón de rugby (izquierda), relaja el meridiano más curvo, K1 , e incurva el
ortogonal a él, K2 , induciendo una geometrı́a idealmente esférica similar a un balón
de baloncesto (derecha).
baloncesto asemeja una córnea emétrope, idealmente esférica, mientras que el de
rugby representa una córnea astigmática, con dos ejes astigmáticos principales: el
de mayor curvatura o máxima refracción K1 , y perpendicular a él, el de menor
curvatura o de mı́nima refracción, K2 . La cirugı́a incisional pretende modificar la
córnea con morfologı́a de balón de rugby, para lograr una morfologı́a similar a la del
balón de baloncesto.
Cuando se realizan incisiones relajantes, el meridiano incidido se aplana. Por
tanto, deben realizarse en el eje astigmático de máxima refracción. Estas incisiones
también provocan el incurvamiento del meridiano ortogonal al incidido. Este efecto
de aplanamiento-incurvamiento de los meridianos se denomina acoplamiento. La
relación entre el grado de aplanamiento de un eje y el incurvamiento de su ortogonal
puede modificar el equivalente esférico final, por lo que las incisiones relajantes deben
conseguir que ambos efectos se compensen, en cuyo caso el factor de acoplamiento
es 1/1. Las incisiones cortas, de menos de 30o , aplanan más el meridiano incidido
que incurvan el no incidido, y el factor de acoplamiento se sitúa entre 1,5 y 2. Las
longitudes intermedias (entre 30o y 90o ) tienen un factor de acoplamiento de 1/1.
Longitudes entre 90o y 110o aplanan los dos meridianos, produciendo un factor de
acoplamiento mayor a 1 [Cristóbal, 2001], hecho que ha sido verificado mediante la
simulación numérica de incisiones arcuatas (Capı́tulo 6). El factor de acoplamiento
debe ser tenido en cuenta en la planificación de la cirugı́a incisional para controlar
que la cirugı́a no modifique el equivalente esférico.
90
Modelado del ojo humano y tratamientos refractivos
Figura 3.7: Algunos parámetros de la cirugı́a incisional para corrección del astigmatismo: zona óptica (zo), longitud (ángulo α), incisiones pareadas.
Parámetros incisionales y nomogramas
En la planificación quirúrgica debe determinarse el valor de cada parámetro
incisional de acuerdo a la condición de cada paciente: grado de astigmatismo, edad,
paquimetrı́a, potencia de la lente intraocular implantada, etc. Los parámetros de la
cirugı́a incisional son:
• Posición de la incisión, denominada habitualmente zona óptica, medida como
el diámetro entre incisiones pareadas enfrentadas con centro en el ápex corneal,
o el doble de la distancia de la incisión al ápex corneal, centro de pupila o eje
óptico.
• Longitud de la incisión, medida como ángulo abarcado, para evitar la dependencia de este parámetro con la distancia al eje óptico (zona óptica).
• Número de incisiones, una sencilla o dos (incisiones pareadas) que se centran
ambas sobre el eje más curvo y diagonalmente opuestas, por lo que se les suele
denominar incisiones enfrentadas.
• Profundidad de la incisión, es un factor que se tiene en cuenta en los nomogramas. No sólo depende del grado de astigmatismo a corregir, sino también
de la edad del paciente, la paquimetrı́a, etc.
Algunos de los parámetros incisionales se ilustran en la Figura 3.7.
Existen algunas variaciones de la cirugı́a incisional respecto a los parámetros
expuestos, que no están consideradas en las simulaciones presentadas en el Capı́tulo
6. Es el caso de las incisiones múltiples (más de dos), incisiones pareadas con distinta
longitud, incisiones rectas, todas ellas incisiones relajantes para la corrección del
astigmatismo, o incisiones radiales (RK), utilizadas para la corrección de la miopı́a.
Las incisiones múltiples y/o de distinta longitud, y en ocasiones, distinta zona
óptica, se utilizan en casos de mayor necesidad de corrección, o de valores de corrección intermedios a los proporcionados por incisiones simples o pareadas de igual
Capı́tulo 3. Tratamientos refractivos
Astigmatismo
1D
2D
3D
4D
>4 D
Tipo de incisión
1 IRL
2 IRL
2 IRL
2 IRL
Nomograma de arcuatas
z.o. 8 mm
91
Longitud
6 mm
6 mm
7 mm
8 mm
10 mm
2 mm x D por encima de 4 D
Tabla 3.1: Nomograma de Gills [Budak et al., 2001].
longitud. Los parámetros (número de incisiones, longitud, posición y profundidad
de cada una) deben ser determinados por un cirujano experimentado al abordar un
caso concreto, por lo que la simulación numérica sólo tendrı́a sentido en el caso de
analizar el modelo de la córnea de ese paciente, o bien realizando una baterı́a de
casos por determinar, ya que existen infinitas combinaciones de incisiones.
Las incisiones rectas o transversas han sido estudiadas y practicadas por diversos
cirujanos, como N. Belmonte o S. P. Thornton, o combinadas con radiales, como
L.A. Ruiz [Belmonte, 2005; Cristóbal, 2006], pero su realización no está actualmente
generalizada por no ofrecer al cirujano un cierto control de los resultados, siendo
frecuente tanto la infracorrección como la hipercorrección [Rashid and Waring, 1989].
Por otra parte, las incisiones radiales, aunque se siguen realizando, cada vez son
menos frecuentes. La cirugı́a láser está desbancando en la actualidad a la cirugı́a
incisional para corrección de ametropı́as esféricas (RK), manteniéndose su uso para
la corrección del astigmatismo mediante incisiones relajantes, tanto en cirugı́as de
catarata como en casos de astigmatismos elevados post-queratoplastia (transplante
de córnea) [Belmonte, 2005]. Por este motivo, se ha considerado que la simulación
de queratotomı́a radial en esta tesis carece de interés clı́nico.
Los parámetros a determinar en la planificación de la cirugı́a (número de incisiones, longitud de ángulo, profundidad, forma, simetrı́a, zona óptica) se recopilan
en nomogramas, que son tablas de referencia elaboradas a partir de la experiencia
clı́nica y en las que las incisiones se indican de acuerdo a las dioptrı́as de astigmatismo que deben ser corregidas. Existen múltiples nomogramas, en los que cada
cada autor aporta sus resultados personales y experiencia clı́nica.
La Tabla 3.1 muestra el nomograma de Gills [Budak et al., 2001], uno de los
más conocidos y en el que se basan otros, como el nomograma de Nichamin [2006]
(Tabla 3.2) o el de Kaufmann et al. [2005]. El nomograma de Cristóbal (Tabla 3.3),
de reciente aparición, considera los factores de los nomogramas clásicos citados e
incorpora, además, el efecto astigmático a largo plazo. Todos los autores coinciden
en que el efecto mayor que se puede conseguir mediante las IRL no es superior
a las 3-3,5 D, por lo que si el objetivo refractivo es neutralizar un astigmatismo
mayor que este, se debe recurrir a incisiones relajantes más cercanas al eje óptico
[Cristóbal, 2001]. Las incisiones relajantes curvas en córnea clara, comúnmente
llamadas arcuatas, se realizan según la misma técnica que las IRL y consiguen un
mayor efecto astigmático. La Figura 3.8 muestra el nomograma de Lindstrom para
Modelado del ojo humano y tratamientos refractivos
92
Cilindro preoperatorio
Solo una IRL nasal
+0,75 a +1,25
Dos IRLs pareadas
+1,50 a +2,00
Dos IRLs pareadas
+2,25 a +2,75
Dos IRLs pareadas
+3,00 a +3,75
Dos IRLs pareadas
A) Astigmatismos contra la regla (eje más curvo: 0-30o / 150-180o )
30-40 años
41-50 años
51-60 años 61-70 años 71-80 años 81-90 años
>90 años
35o
55o
50o
45o
40o
35o
70o
65o
60o
55o
45o
40o
35o
90o
80o
70o
60o
50o
45o
40o
90o , z.o. 8 mm
90o , z.o. 8 mm
85o
70o
60o
50o
45o
81-90 años
>90 años
45-145o )
Cilindro preoperatorio
+1,00 a +1,50
Dos IRLs pareadas
+1,75 a +2,25
Dos IRLs pareadas
+2,50 a +3,00
Dos IRLs pareadas
+3,25 a +3,75
Dos IRLs pareadas
B) Para astigmatismos a favor de la regla (eje más curvo
30-40 años
41-50 años
51-60 años 61-70 años 71-80 años
50o
45o
40o
35o
30o
60o
55o
50o
45o
40o
35o
30o
70o
65o
60o
55o
50o
45o
40o
80o
75o
70o
65o
60o
55o
50o
Tabla 3.2: Nomograma de Nichamin [2006].
Ia.
Ib.
II.
1D
1-2D
2-3D
SEGÚN EL TIPO DE ASTIGMATISMO PROFUNDIDAD de las IRL
A favor de la regla (WTR)
85%
En contra de la regla (ATR)
98%
Oblı́cuos (OA)
90%
SEGÚN LA EDAD: Modificación de la PROFUNDIDAD
Restar 1% de profundidad por cada año superior a 30 hasta los 65 años.
Añadir un 1% de profundidad por cada año inferior a 30 pero nunca mayor al 100%
SEGÚN LA MAGNITUD Y EL EJE DEL ASTIGMATISMO
a) Incisión en el meridiano más curvo.
b) Inc. temporal + 1 IRL de 60o sobre el meridiano más curvo, excepto ATR (caso a)
a) Incisión en el meridiano más curvo + 1 IRL de 60o sobre el limbo opuesto.
b) Incisión temporal+ 2 IRL de 60o opuestas sobre el meridiano más curvo, excepto ATR (opción a).
a) Incisión en el meridiano más curvo + 2 IRL de 75o opuestas sobre el meridiano más curvo.
b) Incisión temporal + 2 IRL de 85o opuestas sobre el meridiano más curvo, excepto ATR (opción a)
Tabla 3.3: Nomograma de Cristóbal et al. [2006].
quetatotomı́as arcuatas, que es el de uso más generalizado. Sin embargo, este autor
recomienda una profundidad de incisión del 100%, recomendación que no todos
los autores comparten, utilizando la profundidad como otro parámetro incisional
[Cristóbal, 2001].
El nomograma de Cristóbal et al. [2006] para incisiones relajantes limbares se
muestra de forma esquemática en la Figura 3.9, indicando los parámetros de entrada y los de salida. En este nomograma se indica la posición de la incisión de la
facoemulsificación, los parámetros de las incisiones limbares para la corrección de
astigmatismo según el nivel de astigmatismo preoperatorio y también las incisiones
en córnea clara (arcuatas) que deberı́an ser realizadas además de las IRL para casos
de astigmatismos preoperatorios superiores a 3 D.
Entre los diversos nomogramas se observan similitudes y diferencias. Los nomogramas de Cristóbal et al. [2006], Nichamin [2006], Gills [Budak et al., 2001] y
Capı́tulo 3. Tratamientos refractivos
93
Figura 3.8: Nomograma de Lindstrom para incisiones arcuatas [Chu et al., 2005].
Figura 3.9: Parámetros de entrada y salida del nomograma de Cristóbal et al. [2006].
94
Modelado del ojo humano y tratamientos refractivos
Wang et al. [2003] consideran el nivel de astigmatismo que debe ser corregido.
Otros parámetros como el número de incisiones y longitud de la incisión, se incluyen
también. Sin embargo, hay parámetros que no todos los nomogramas incorporan,
como la edad, la profundidad de incisión y el tipo de astigmatismo, y la influencia
de estos parámetros se pondera de forma distinta en los nomogramas en que sı́ son
considerados. A modo de ejemplo, el nomograma de Cristóbal et al. [2006] considera la edad como un factor para aumentar o disminuir la profundidad de la incisión,
mientras que Nichamin [2006] considera la edad en periodos de 10 años, desde 20
hasta 80, para modificar la longitud de la incisión, y no la profundidad. Otra diferencia entre estos dos nomogramas está relacionada con la posición de la incisión de
la cirugı́a de catarata, que es un factor a considerar ya que no es anastigmática. El
nomograma de Cristóbal et al. [2006] indica la posición óptima de dicha incisión en
cada caso.
El cirujano oftalmólogo interpreta y mejora la información recogida en los nomogramas, personalizándolo con su “factor cirujano”, que es la modificación que aporta
en base al historial de resultados obtenidos en sus cirugı́as. También debe considerar
los recursos que tiene a su alcance. Por ejemplo, si dispone de un cuchillete calibrable, puede utilizar un nomograma que considere la profundidad de corte como
parámetro; si no dispone de ese tipo de instrumental, deberá realizar las incisiones a
la profundidad que corresponda a las medidas de cuchillete disponibles y modificar
el nomograma para compensar distintos valores de profundidad con modificaciones
en la longitud o zona óptica de la incisión.
Los nomogramas se utilizan como herramienta en la planificación quirúrgica, pero
no incorporan todos los factores que repercuten en el resultado, como el factor de
cirujano o las propiedades biomecánicas del paciente especı́fico. Como consecuencia, en dos cirugı́as distintas puede obtenerse un valor diferente de astigmatismo
inducido quirúrgicamente, aunque se haya realizado en ambos casos el mismo tipo
de incisiones prescritas por un mismo nomograma. Por lo tanto, asumiendo que no
se va a obtener error cero en el resultado final, el cirujano oftalmólogo debe infracorregir el astigmatismo, pues todos los cirujanos oftalmólogos consideran indeseable
la hipercorrección [Wang et al., 2003]. Otras causas de inexactitud en el resultado
de la cirugı́a, en general inapreciables en su ejecución, son: el error en la identificación exacta del meridiano más curvo en que centrar la incisión, la inclinación del
cuchillete al realizar la incisión en lugar de mantenerlo perpendicular a la superficie
en cada instante, o los errores de calibración del cuchillete que provocan errores en
la profundidad de corte.
Una vez determinados los parámetros de las incisiones, según los nomogramas y
la opinión clı́nica del cirujano respecto al caso particular, se aborda la cirugı́a. La
Figura 3.10 muestra el desarrollo de una cirugı́a de incisiones relajantes curvas para
corrección del astigmatismo. Se comienza por el marcaje con rotulador quirúrgico
del meridiano más curvo sobre la córnea, correctamente centrado en el apex. Este
paso debe ser realizado con precisión, puesto que un error en la orientación de las in-
Capı́tulo 3. Tratamientos refractivos
95
Figura 3.10: Proceso de cirugı́a incisional de arcuatas. El meridiano astigmático
principal y los grados de arco de la incisión se marcan sobre la córnea. Posteriormente, se calibra el cuchillete a la profundidad requerida y se practican las incisiones.
cisiones o su descentramiento puede causar no sólo infracorrección o hipercorrección,
sino también un aumento del grado de astigmatismo del paciente. Posteriormente,
se calibra el cuchillete a la profundidad de corte que haya sido determinada en la
planificación quirúrgica, evitando de esta forma que se produzcan perforaciones inesperadas. Se realiza el corte siguiendo la marca de tinta en la córnea, apoyando el
patı́n del cuchillete sobre la superficie corneal. Las incisiones relajantes, al no ser
perforantes no precisan sutura, y salvo complicaciones, el postoperatorio es rápido
y no causa molestias importantes al paciente.
La metodologı́a descrita en esta tesis, desde el desarrollo de los distintos modelos
de córnea hasta la simulación de la cirugı́a incisional, permitirá el desarrollo de
nomogramas basados en la modificación de los parámetros incisionales, ası́ como la
optimización de los parámetros de la cirugı́a en un caso especı́fico, o bien, ayudar al
cirujano a acotar los factores que influyen en la variablilidad de los resultados, con
independencia de los factores objetivos de la cirugı́a cuya influencia es bien conocida
y reproducida por la simulación numérica (longitud de la incisión, zona óptica, etc).
3.2.3
Cirugı́a refractiva con láser: LASIK y PRK
En la actualidad, la cirugı́a refractiva con láser es ampliamente utilizada en
todo el mundo, siendo de aplicación sencilla y rápida para el cirujano oftalmólogo y
proporcionando resultados muy satisfactorios al paciente, con lo que mejora considerablemente su calidad de vida. Se aplica para la corrección de miopı́a, hipermetropı́a
y astigmatismo. Varias técnicas han sido desarrolladas, siendo PRK (Photorefractive
Keratectomy) y LASIK (Laser In-Situ Keratomielusis) las más utilizadas, aunque
siguen apareciendo otras “nuevas”, como LASEK (Laser Epithelial Keratomileusis),
y epi-LASIK (Epithelial Laser In-Situ Keratomileusis). A continuación se describen
brevemente dichas técnicas quirúrgicas.
Las técnicas refractivas con láser excı́mer realizan una ablación de tejido corneal
96
Modelado del ojo humano y tratamientos refractivos
Figura 3.11:
Proceso de una intervención por técnica LASIK
(http://hutchinseye.com). En la córnea intacta (1) se debe realizar un corte
por queratomo para la creación del flap (2-3), se retira el flap (4) y se aplica el
láser excı́mer (5); una vez realizada la ablación (6), se reposiciona el flap sobre el
estroma (7), finalizando el proceso (8).
con el fin de remodelar la curvatura anterior de la superficie de la córnea, modificando de esta forma su potencia óptica y, por tanto, la de todo el ojo. La ablación
de superficie de tejido corneal fue ideada por el oftalmólogo español J. Barraquer
en 1.950, quien desarrolló el primer microqueratomo para cortar finas capas de la
córnea anterior con el fin de modificar su morfologı́a, llamando a este procedimiento
“keratomileusis”. La técnica PRK fue desarrollada en 1.983 en la Universidad de
Columbia por S. Trokel, quien propuso la aplicación del láser excimer para cirugı́a
refractiva. LASEK fue introducida por Camellin [2003], mientras que Pallikaris et al.
[2003] describió la técnica de epi-LASIK.
La técnica de PRK es una técnica de cirugı́a de superficie. Se comienza eliminando el epitelio, bien por medios mecánicos utilizando un queratomo, bien utilizando el
mismo láser excı́mer. Tras la desepitelización se realiza la ablación láser. El epitelio
se regenera en pocos dı́as después de la intervención de PRK a partir de las células
precursoras presentes en el limbo esclero-corneal.
La técnica de PRK presenta algunos inconvenientes, como dolor y molestias
hasta la completa regeneración del epitelio, que se produce en los dı́as posteriores
a la cirugı́a; el limitado grado de potencias que pueden corregirse, o el riesgo de
aparición de Haze (opacificación corneal).
La técnica LASIK surgió con la intención de ofrecer una alternativa a la PRK.
Se basa en la preservación del epitelio, mediante la creación de un flap previa a la
ablación. Es decir, se practica un corte en la córnea anterior, creando una lámina de
tejido que queda adherida por un extremo o “bisagra”; a dicha lámina también se
le denomina “colgajo”. La finalidad del flap es preservar el epitelio y la membrana
de Bowman, evitando de esta forma el dolor durante el postoperatorio. El flap
se crea con una espesor de entre 120 y 150 micras. Puede ser realizado de forma
mecánica, con un aparato denominado queratomo, o con un láser de femtosegundo,
Capı́tulo 3. Tratamientos refractivos
97
el cual permite realizar cortes menos profundos para crear el flap. Actualmente se
habla de cortes a 100 micras. Sin embargo, el láser de femtosegundo no ha logrado
desbancar al queratomo, estando todavı́a en discusión por su alto coste y porque
ofrece ventajas limitadas respecto al queratomo. La Figura 3.11 muestra el proceso
descrito anteriormente de la cirugı́a LASIK en ocho pasos.
Otras técnicas de cirugı́a de superficie son LASEK y epi-LASIK, que también
pretenden preservar el epitelio. Ambas técnicas consisten en la creación de un flap
epitelial mediante el desprendimiento del epitelio, que es reposicionado después de la
ablación láser. En LASEK se causa el desprendimiento del epitelio de forma quı́mica,
mediante su exposición a una solución alcohólica [Camellin, 2003]. Algunos autores
sugieren un potencial efecto de toxicidad celular del alcohol utilizado [Gabler et al.,
2002; Kim et al., 2002], por lo que se desarrolló la técnica de epi-LASIK, en la que
se realiza la separación epitelial de forma mecánica, utilizando un microqueratomo
especial [Pallikaris et al., 2003].
En general, PRK se practica a una profundidad menor que LASIK, puesto que
PRK comienza la ablación desde de la superficie corneal inmediata bajo el epitelio
(cuyo espesor de 50 micras ha sido eliminado) y LASIK lo hace a partir de la
profundidad a la que haya sido cortado el flap (entre 120 y 150 micras). Este hecho
tiene relevancia por dos motivos. Por una parte, la PRK realiza la ablación a una
profundidad que corresponde a la región más fibrada del tejido estromal, por lo que
existe mayor posibilidad de regresión y de fibrosis del tejido que en LASIK. Por otra
parte, LASIK llega a una mayor profundidad, donde el tejido estromal es menos
rı́gido, por lo que el riesgo de ectasia (adelgazamiento y protrusión de la córnea) es
considerablemente superior que en cirugı́a PRK. LASIK tiene un postoperatorio más
rápido que PRK, menor de 24 horas, en el que cesa dolor y se produce recuperación
visual. Además, en LASIK no se produce Haze, sin embargo, en algunas ocasiones,
puede producirse ectasia.
Mención especial merece la relevancia de la paquimetrı́a en la planificación de la
cirugı́a refractiva con láser excı́mer. Para realizarla, el cirujano oftalmólogo verifica
que la córnea del paciente es suficientemente gruesa, asegurando un buen espesor
corneal post-quirúrgico. Se descarta al paciente como candidato a cirugı́a refractiva
con láser excı́mer, además de por patologı́a o sospecha de patologı́a, por espesor
corneal demasiado pequeño o bien por tener un grado de miopı́a, hipermetropı́a o
astigmatismo tan elevado que serı́a necesaria una gran profundidad de ablación y
por lo tanto, serı́a insuficiente el espesor de lecho estromal residual.
La corrección miópica se realiza mediante la ablación de tejido en el área central
de la córnea, produciendo un aplanamiento de la misma. El efecto refractivo de este
aplanamiento es la disminución de la potencia óptica de la córnea, desplazando hacia
atrás el punto de convergencia de los rayos de luz (que en la miopı́a se presenta por
delante de la retina, según se explica en el Capı́tulo 2) aproximándolo a la retina o,
idealmente, logrando que caiga sobre ella. La corrección de la hipermetropı́a consiste
en la eliminación de tejido de forma anular, incurvando el área central de la córnea
98
Modelado del ojo humano y tratamientos refractivos
Figura 3.12: Parámetros de la ablación láser para corrección miópica [Munnerlyn
et al., 1988]. t0 : profundidad de la ablación; S: diámetro de ablación; R1 , R2 : radios
de curvatura inicial y final de la córnea.
y aumentando ası́ su potencia. La corrección de astigmatismo, que generalmente se
presenta asociado a miopı́a o hipermetropı́a, se realiza estimando los parámetros de
ablación para corregir la ametropı́a esférica, modificados según el eje astigmático,
resultado una ablación cuya geometrı́a no es de revolución.
Los parámetros de la cirugı́a son determinados por el software del computador
que gestiona el láser excı́mer, de acuerdo a las caracterı́sticas de cada paciente, y
son supervisados por el cirujano antes de proceder a la cirugı́a. La profundidad de
ablación correspondiente a cada caso de corrección se estima utilizando la siguiente
expresión, propuesta por Munnerlyn et al. [1988]:
−S 2 D
t0 ∼
=
8(n − 1)
(3.1)
donde t0 es la profundidad y S es el diámetro de la ablación; D es el valor de la miopı́a
que debe corregirse, en dioptrı́as y n es el ı́ndice de refracción de la córnea, cuyo
valor es 1,377 aproximadamente Munnerlyn et al. [1988]. La Figura 3.12 muestra
estos parámetros sobre una córnea, de forma esquemática.
Los equipos de laser excı́mer se basan en la expresión 3.1 para la estimación
de los parámetros. Sin embargo, no siempre se logra la emetropı́a. En esta tesis
(Capı́tulo 6) se realizan simulaciones de cirugı́a de ablación láser para la corrección de
distintos niveles de miopı́a con el fin de determinar la influencia de la PIO, dentro del
rango fisiológico sano (10-21 mmHg), en los resultados refractivos postquirúrgicos,
proporcionando la posibilidad de optimización de la profundidad de ablación, modificándolos en función de la tonometrı́a del paciente.
Capı́tulo 3. Tratamientos refractivos
99
Figura 3.13: Córnea sana (izquierda) y córnea con queratocono (derecha) que presenta una protrusión caracterı́stica en forma de cono.
3.3
Tratamientos más recientes para el queratocono
La cirugı́a refractiva está en continua evolución. Evolucionan los aparatos, las
técnicas se mejoran y se investigan nuevos tratamientos. Los avances en patologı́as
como la catarata o la presbicia son beneficiosas para la sociedad en general, pues
afectan a gran parte de la población.
Sin embargo, existen patologı́as degenerativas que, aunque no afectan a un elevado número de individuos, deben ser motivo de investigación por no existir un
tratamiento efectivo y seguro. Uno de esos casos es la patologı́a denominada queratocono. Es una enfermedad degenerativa de la córnea y constituye el tipo más frecuente
de ectasia corneal. Hasta muy recientemente, la forma de detener la evolución
de esta patologı́a era el transplante de córnea; sin embargo, en la actualidad se
está produciendo una revolución en su tratamiento. Por este motivo, se centrará
este apartado en dos técnicas para el tratamiento del queratocono, la inserción de
segmentos intraestromales de anillos corneales (Intrastromal Corneal Ring Segments,
ICRS) y el cross-linking (CXL) del colágeno corneal. Se comenzará haciendo una
breve descripción de la patologı́a del queratocono para posteriormente justificar la
forma de actuación de estos dos tratamientos.
El queratocono
La palabra “queratocono” procede del griego kerato (córnea) y konos (cono) por
la morfologı́a que adopta la córnea degenerada que lo padece, similar a un cono
(Figura 3.13). El queratocono es una enfermedad relativamente rara de la córnea,
que afecta a 1 de cada 2.000 habitantes en España [Barraquer et al., 2004]. Generalmente comienza en la pubertad y progresa hasta la treintena.
Se trata de una ectasia asimétrica, bilateral, progresiva y no inflamatoria de la
córnea debido a una inestabilidad biomecánica gradual. El queratocono provoca
deformación y debilitamiento del tejido corneal, tanto por degradación del mismo,
100
Modelado del ojo humano y tratamientos refractivos
(a) Córnea sana.
(b) Queratocono.
Figura 3.14: En la lámpara de hendidura se puede observar el adelgazamiento corneal
y la protrusión de la córnea en presencia de queratocono.
como por pérdida de espesor. Esta circunstancia se debe a que las fibras de colágeno
dejan de aportar rigidez estructural a la córnea patológica, lo que provoca una
deformación corneal con pérdida de la morfologı́a esférica. La Figura 3.14 muestra
una córnea sana (a) y un queratocono (b) observados por lámpara de hendidura. El
adelgazamiento corneal y la morfologı́a cónica de la córnea patológica son evidentes.
Para realizar el diagnóstico del queratocono, deben determinarse las alteraciones
de la morfologı́a corneal mediante topografı́a y paquimetrı́a. De esta forma puede
distinguirse el área de mayor elevación, en la que se encuentra el cono, indicada
por colores más calientes que el resto de la córnea, ası́ como el adelgazamiento del
tejido en ese área. También se puede observar astigmatismo irregular, aplanamiento
periférico en el sector opuesto al cono, etc.
La clasificación del estado evolutivo del queratocono es importante de cara al
tratamiento. Clásicamente se han establecido cuatro categorı́as, atendiendo a la
curvatura corneal (K) como criterio primario de clasificación:
• Leve: <45 D en ambos meridianos.
• Leve-Moderado: 45-52 D en ambos meridianos.
• Avanzado: 52-60 D en ambos meridianos.
• Severo: >60 D en ambos meridianos.
El grado de degeneración del tejido y su debilitamiento estructural, todavı́a no
puede ser cuantificado de una forma sencilla. La aparición reciente del Analizador de Respuesta Ocular (ORA) de Reichert, Ophthalmic Instruments, Inc., Depew, New York, cuyo funcionamiento se explica en el Capı́tulo 2, permite medir in
vivo la rigidez corneal y determinar la primera medición directa de caracterı́sticas
biomecánicas corneales, como la histéresis corneal (CH) y el factor de resistencia
Capı́tulo 3. Tratamientos refractivos
101
Figura 3.15: Curvas tomadas por ORA (Reichert, Ophthalmic Instruments, Inc.,
Depew, New York) de una córnea sana (izquierda) y un queratocono (derecha) [del
Buey et al., 2009a]. Los valores de CH y CRF en queratocono, 7 y 5,3 respectivamente, son muy inferiores al de la córnea sana, (CH= 11,7 y CRF= 11,9).
corneal (CRF), siendo evidentes las diferencias con córneas sanas y medible el grado
de degeneración, según estos dos parámetros. La Figura 3.15 muestra las curvas
de la medición por ORA de una córnea sana y de un queratocono. La curva correspondiente al queratocono es más irregular y soporta menor presión, debido a la
laxitud y debilidad del tejido; estos aspectos son cuantificables mediante los valores
de CH y CRF. En la córnea sana, estos valores son aproximadamente 11,7 mmHg y
11,9 mmHg, respectivamente; en la córnea con queratocono son muy inferiores. Los
resultados aquı́ presentados corresponden a un estudio de del Buey et al. [2009a]
en el que los valores medios de CH y CRF para córneas con queratocono son de 7
mmHg y 5,3 mmHg, respectivamente.
El queratocono evolutivo, hasta hace sólo unos años, tenı́a un tratamiento óptico
con gafas o lentes de contacto y un tratamiento quirúrgico, que prácticamente quedaba limitado a la queratoplastia penetrante. Sin embargo, a partir de cierto estado
de evolución el paciente no tolera las lentes de contacto por causarle dolor y otras
molestias; en casos avanzados, la córnea llega a estar afectada de tal forma que su
mejor agudeza visual corregida (MAVC) disminuye sustancialmente sin posibilidad
de mejora mediante medios ópticos (gafas). Respecto al tratamiento quirúrgico, la
queratoplastia presenta muchos inconvenientes: la necesidad de donante y el riesgo
de rechazo son dos de los más relevantes.
Recientemente han aparecido dos nuevos tratamientos: la inserción de segmentos de anillos corneales intraestromales (ICRS) y el cross-linking (CXL) del colágeno
corneal. Ambos consiguen proporcionar un refuerzo estructural a la córnea debilitada por el queratocono. A continuación se describen estos dos tratamientos y los
efectos que inducen en la córnea patológica [Cezón, 2009].
102
Modelado del ojo humano y tratamientos refractivos
Figura 3.16: Segmentos intraestromales (izquierda) y su posición al ser implantados
en el espesor corneal (derecha).
3.3.1
Implantes de segmentos de anillos intraestromales
El implante de segmentos de anillos intraestromales es una técnica relativamente
reciente. J.I. Barraquer fue pionero en la idea de modificar el espesor corneal de
forma anular. En 1.949 planteó la idea de forma sustractiva, es decir, eliminando
material corneal, mediante la resección laminar anular; posteriormente realizó intervenciones con inclusiones anulares, alcanzando como conclusión su “ley de los
espesores”, enunciada en 1.964: “cuando se añade material en la periferia de la
córnea o se retira una cantidad igual del área central de la misma, se logra un efecto
de aplanamiento y viceversa” [Barraquer, 1964]. En 1.966, E.D. Blavstskaya realizó
implantes de anillos homoplásticos en córneas de conejo, observando aumento de
curvatura sobre la posición del anillo y aplanamiento y astigmatismo en la parte
central de la córnea [Blavatskaya, 1968]. Posteriormente, Zhivotovsky y Vishnevetsky implantaron anillos de plástico en dos casos de alta miopı́a, reportando “buen
resultado” a los dos años [Zhivotovsky and Vishnevetsky, 1971].
La aparición de implantes similares a los actuales sucedió a finales de los años
80. No eran segmentos como los utilizados actualmente sino anillos completos de
360o , y se aplicaban a la corrección de alta miopı́a. Posteriormente evolucionaron
a segmentos anulares de distintas longitudes de arco y distintos espesores. Su aplicación a la corrección de la miopı́a ofrecı́a buenos resultados, preservaba la asferidad
corneal y era un tratamiento económico, pero no era una alternativa a las técnicas
LASIK o PRK, que lograban mayor precisión, rango de corrección dióptrica y eran
de aceptación mayoritaria por parte de los pacientes. El interés en esta técnica se
renovó recientemente, al ampliarse su indicación al queratocono [Colin et al., 2000]
y otras ectasias corneales, como las ectasias post-LASIK [Siganos et al., 2002]. La
Figura 3.16 muestra dos segmentos comerciales y su posición en el seno estromal.
La implantación de segmentos de anillos intraestromales tiene el objeto de aportar un refuerzo estructural externo que actúa como soporte del tejido corneal debilitado. La inserción de los segmentos provoca un aplanamiento de la zona central
de la córnea delimitada por los segmentos (Figura 3.17). Este aplanamiento causa
Capı́tulo 3. Tratamientos refractivos
103
Figura 3.17: El efecto de aplanación producido por los segmentos en la córnea es
similar al de tensar la rama de un árbol por dos puntos.
Figura 3.18: Imagen por tomografı́a de coherencia óptica tomada con Pentacam
(Oculus) de una córnea con implante de dos segmentos Intacs. Se aprecia una
mayor influencia de los implantes en la superficie interior corneal (endotelio).
una hipermetropización del ojo, es decir, disminuye la longitud axial (AL) y la
profundidad de cámara anterior (ACD). Además, la inserción de ICRS regulariza
la morfologı́a corneal y desplaza el apex corneal hacia el centro de la pupila; logra corrección refractiva tanto esférica (miopı́a) como en cilindro (astigmatismo),
regularizando el astigmatismo irregular causado por la ectasia; reduce aberraciones
ópticas y mejora la calidad visual, e incluso la tolerancia a lentes de contacto.
La “ley de espesores” de Barraquer citada anteriormente no tenı́a en cuenta
un aspecto que hoy se conoce: las inclusiones deben ser relativamente superficiales
para tener efecto directo por modificación del espesor sobre la curvatura corneal
anterior [Cezón, 2009]. Por lo tanto, la “ley de los espesores” no se cumple en todos
los casos, y el efecto de la inserción de ICRS la contradice en dos aspectos. Por
una parte, la profundidad de la inserción; se conoce que afecta más a la superficie
posterior corneal (endotelio) que a la superficie anterior. Esto se observa claramente
en imágenes tomadas por tomografı́a de coherencia óptica (OCT) como la que se
104
Modelado del ojo humano y tratamientos refractivos
Figura 3.19: Segmentos Keraring (Mediphacos).
muestra en la Figura 3.18, en la que la deformación corneal es mucho más acusada
en su parte interior que en la superficie anterior. Por otra parte, el efecto cilı́ndrico
(sobre el astigmatismo) de los segmentos es mucho mayor en segmentos cortos (90o y
120o ) que en los largos (>150o ), incurvando el eje en el que está centrado el segmento
y aplanando el perpendicular a él. Según la “ley de espesores” de Barraquer, los
segmentos deberı́an aplanar el eje en que están centrados. Los segmentos de 150o o
mayores tienen un efecto de aplanación tanto en el eje en que están centrados como
en su ortogonal, siendo mayor el efecto en éste último. Además de la longitud del
segmento, el espesor también debe ser correctamente seleccionado según el efecto
refractivo que se necesite, puesto que los anillos más gruesos logran un mayor efecto
cilı́ndrico.
En general, los parámetros que determinarán el efecto postquirúrgico son: la
altura y geometrı́a de la sección, la longitud (medida en amplitud de ángulo) y la
zona óptica en que deben ser implantados. Por este motivo existe una amplia gama
de segmentos comerciales, que presentan distintas geometrı́as de sección (hexagonal,
triangular, ovalada, etc) y de dimensiones en cuanto a espesor y longitud. Todos
ellos se fabrican en PMMA (polimetilmetracrilato), que es un material inerte y
completamente biocompatible.
Actualmente existen varios tipos de ICRS comerciales, de entre los cuales los
dos tipos de uso más generalizado son: Keraring (Mediphacos) e Intacs (Addition
Technology Inc.). Los segmentos Keraring (Figura 3.19) tienen sección de geometrı́a
triangular con base plana de 600 µm de ancho y espesores entre 150 µm y 350 µm,
en incrementos de 50 µm; se implantan en zona óptica de 5,0 mm, 5,5 mm o 6,0
mm (según el modelo); longitud de arco de 90o , 120o , 150o o 160o (según el modelo),
Capı́tulo 3. Tratamientos refractivos
Esfera (D negativas)
<2
<4
<6
Cilindro
<3
3-6
150
200
150
200
150
200
105
(D negativas)
6-9
-12 <12
250
300
350
250
300
350
250
300
350
Longitud de Arco
90o
120o
160o
Tabla 3.4: Nomograma de Albertazzi [Cezón, 2009] de segmentos Keraring para
ectasias simétricas y altos astigmatismos.
Espesor corneal en la zona del implante (µm)
Queratometrı́a (D)
400-450
450-500
500-550
45,00-49,00
200
200
250
50,00-54,00
200
250
300
55,00-59,00
200
250
300
Altura del segmento inferior (µm)
Astigmatismo
Programación Quirúrgica
Topográfico (D)
Segmento superior/ Segmento inferior
1,0-2,0
0/160o
0/120o
Según esfera/cilindro
o
o
2,0-3,0
90 (-50)/160
3,0-4,0
90o (=)/160o
90o (-50)/120o
Según morfologı́a
4,0-5,0
90o (=)/120o
(=) significa que ambos segmentos implantados tienen el mismo espesor, y (-50) que
el segmento superior tiene 50 µm menos que el segmento superior
Tabla 3.5: Nomograma 2.009 de J. A. Alfonso y colaboradores [Cezón, 2009] para la
selección del espesor de segmentos Keraring en función de la queratometrı́a y del espesor corneal en la zona del implante, y su combinación en función del astigmatismo
corneal.
y 210o . Los segmentos Intacs tienen sección de geometrı́a hexagonal; se implantan
en zona óptica de 7-8 mm; tienen espesores de 250, 300, 350, 400 y 450 µm. Los
segmentos Intacs SK tienen geometrı́a de sección elı́ptica, se implantan en una zona
óptica menor, de 6 mm, y son de mayores espesores, 400 µm y 450 µm; por tener
menor zona óptica y mayor espesor, causan un mayor efecto.
La variedad de segmentos comerciales presentada pretende ofrecer una amplia
gama de implantes para poder responder a las caracterı́sticas especiales de cada caso.
En la actualidad no existe un nomograma estándar de aplicación universal, sino que
las casas comerciales colaboran con los clı́nicos que implantan los segmentos, de
forma que hay una continua actualización y mejora de las recomendaciones de su
aplicación, mientras que cada cirujano oftalmólogo se basa en dichos nomogramas
como referencia y los adapta a su propia experiencia clı́nica.
Tipo de cono
Levemente Asimétrico
Moderadamente Asimétrico
Muy Asimétrico
Global
Central
Grosor
Superior<inferior
Superior<inferior
Superior<inferior
Mismo grosor
Mismo grosor
EE <3 D
0,25/0,30
0,35/0,40
0,25/0,40
0,40/0,40
0,40/0,40
EE >3 D
0,25/0,35
0,40/0,45
0,25/0,45
0,45/0,45
0,45/0,45
Tabla 3.6: Nomograma de Colin [2006] para combinación de segmentos Intacs, en
función del equivalente esférico y del tipo de queratocono según su simetrı́a.
106
Modelado del ojo humano y tratamientos refractivos
Las recomendaciones del fabricante de segmentos Keraring son las siguientes:
• Realización de topografı́a y paquimetrı́a en una zona óptica de 6 mm.
• Determinar el eje más curvo y la posición relativa del cono o zona ectásica
respecto a él, determinando el tipo de ectasia según patrones topográficos.
• Consultar el nomograma adecuado al tipo de ectasia determinado en el paso
anterior. En cada nomograma se indica la longitud (en grados de ángulo) y
el espesor (en µm) del segmento o par de segmentos a implantar. También se
indica la posición del segmento o segmentos, centrados en el eje más curvo.
• Antes de la implantación de los segmentos, debe verificarse que el espesor de
los segmentos a implantar no excede el 60% del valor de la paquimetrı́a mı́nima
en la zona óptica de 6 mm.
Por otra parte, las recomendaciones del fabricante de segmentos Intacs son:
• Tomar la topografı́a para determinar el descentramiento del cono, ası́ como la
refracción en cilindro positivo.
• Establecer el eje cilı́ndrico positivo.
• Para la selección de segmentos, la recomendación general es: se utilizan simétricos para normalizar ectasias centrales, mientras que utilizan segmentos
desiguales para normalizar ectasias descentradas.
• Se proponen nomogramas para casos de queratocono, queratectasia, miopı́a
y post-RK, indicando en cada uno la utilización de segmentos simétricos o
de distinto tamaño, y su espesor, en función del nivel dióptrico que se debe
corregir.
• Debe existir una paquimetrı́a de al menos 450 µm en el lugar de la incisión.
Las Tablas 3.4 y 3.5 muestran los nomogramas desarrollados por R. Albertazzi
y J.F. Alfonso para selección de segmentos Keraring. En el primer caso, se indica
la elección del espesor y longitud de arco del segmento en función de las dioptrı́as
de esfera y cilindro que deban ser corregidas, en casos de ectasias simétricas. En
el segundo caso, se indica el valor de espesor de segmento y la combinación más
adecuada de segmentos para corregir astigmatismos de hasta 5 D. Otros autores
consideran en sus nomogramas el equivalente esférico, sin distinguir entre esfera y
cilindro; además, el estado de evolución del queratocono o su clasificación según
patrones topográficos también dan lugar a distintos nomogramas. En la Tabla 3.6
se muestra el nomograma de Colin [2006] para segmentos Intacs, en el que indica la
combinación de segmentos en función de la simetrı́a que presenta el queratocono y
el equivalente esférico.
Capı́tulo 3. Tratamientos refractivos
(a) Segmento centrado en el
queratocono.
107
(b) Segmentos enfrentados
para estabilizar el astigmatismo irregular.
Figura 3.20: Planificación de dos cirugı́as de implante de segmentos intraestromales
sobre el mapa queratométrico de las córneas patológicas.
En resumen, la particularidad de cada caso implica una dificultad en poder generalizar los resultados clı́nicos obtenidos, y por lo tanto, la elaboración de un nomograma
universal que pueda ser aplicado con éxito a cualquier paciente.
Además de la variedad de segmentos comercialmente disponibles, con diversas
geometrı́as y dimensiones, existen otros parámetros que deben ser estimados en la
planificación de la cirugı́a. La Figura 3.20 muestra dos mapas queratométricos en
los que se han utilizado un segmento o dos. En un caso, el segmento se implanta
centrado en el meridiano más curvo, que viene determinado por el vértice del queratocono, haciendo un efecto “bra”, es decir, de sostén del tejido. En el otro caso,
se han centrado los segmentos en el eje más plano con el fin de estabilizar el astigmatismo irregular, regularizando la topografı́a. De esta forma, no todos los casos
pueden ser tratados con un mismo criterio de inserción, por lo que las casas comerciales en su indicación consideran el patrón topográfico como primer paso para
la selección adecuada de los segmentos. En general, los parámetros a considerar
en la planificación de la cirugı́a son: posición del implante (centrado o no en el
meridiano más curvo), segmentos pareados o simples, pareados iguales o distintos,
geometrı́a y espesor de la sección, longitud del segmento (ángulo abarcado), zona
óptica (distancia al ápex corneal).
La implantación de ICRS es un tratamiento quirúrgico sencillo y prácticamente
reversible. Los segmentos implantados pueden observarse en la córnea mediante
biomicroscopı́a con lámpara de hedidura, como se muestra en la Figura 3.21. No
causan molestias en el paciente. No obstante, en casos de ectasias avanzadas, los
efectos terapéuticos de los segmentos intraestromales son más dudosos, encontrando
un efecto de regresión mayor cuanto más avanzada está la enfermedad. Además de
la regresión, también se ha observado en algunos casos en que se han implantado
108
Modelado del ojo humano y tratamientos refractivos
Figura 3.21: Los segmentos implantados son apreciables por biomicroscopı́a en
lámpara de hendidura.
segmentos de espesores grandes, que se puede producir extrusión.
Los segmentos intracorneales constituyen una forma muy efectiva de abordaje
frente a la ectasia corneal en los estadı́os poco avanzados. Los segmentos intracorneales conservan la asfericidad positiva de la córnea y disminuyen el origen de
las aberraciones esféricas. No curan la enfermedad pero la mejoran disminuyendo
la refracción, aumentando la agudeza visual, sin y con corrección, y permitiendo
estabilizar el proceso [Cezón, 2009].
La simulación numérica utilizando la metodologı́a propuesta en esta tesis permitirá la construcción de nomogramas especı́ficos para ICRS de determinadas geometrı́as. También es de aplicación para casos especı́ficos, en cuyo caso, el modelado de
la córnea patológica del paciente en cuestión reproduzca la morfologı́a y propiedades
de material del tejido debilitado, pudiendo realizar el análisis personalizado para determinar la combinación de segmentos óptima para ese caso. En el Capı́tulo 6 se
presentan simulaciones numéricas de implante de ICRS con el fin de observar los
cambios biomecánicos que induce en una córnea patológica y analizar sus efectos en
caso de aplicación de este tratamiento combinado con el de cross-linking de colágeno
corneal, técnica que se presenta a continuación.
3.3.2
La técnica del cross-linking
El cross-linking es una técnica muy utilizada en Bioingenierı́a para endurecer
materiales y para estabilizar tejidos, con aplicaciones en diversos campos de la Medicina. Por ejemplo, en la fabricación de bombas cardı́acas artificiales se realiza un
crosslinking quı́mico con glutaraldehido; en Odontologı́a, la luz ultravioleta tipo A
se utiliza para endurecer materiales de relleno.
El cross-linking (CXL) corneal fue introducido en la Oftalmologı́a por Theo Seiler
y sus colaboradores Spoerl et al. [1998] y Wollensak et al. [2003a]. En córneas
ectásicas, la estructura del colágeno corneal se presenta alterada, con disminución
del entrecruzamiento de las fibras de colágeno y aparición de roturas en la membrana
Capı́tulo 3. Tratamientos refractivos
109
Figura 3.22: Tratamiento de cross-linking: irradiación ultravioleta de la córnea del
paciente impregnada de riboflavina.
de Bowman. Se planteó la necesidad de un tratamiento capaz de reforzar esta
estructura corneal debilitada.
El tratamiento de CXL del colágeno corneal produce una fotopolimerización de
las fibrillas estromales de la córnea, consiguiendo incrementar su dureza y resistencia
frente a la queratectasia a través de la combinación de una sustancia fotopolimerizadora, la riboflavina al 0,1% (Vitamina B2), con un haz de luz ultravioleta A
(UVA) de longitud de onda de 370 nm (Figura 3.22). La presencia de riboflavina
se ha demostrado necesaria, no sólo para que se produzcan los enlaces mediante la
radiación UVA, sino también para proteger endotelio, cristalino y retina durante el
tratamiento, por lo que el cirujano se debe asegurar antes de proceder a la irradiación
de que la riboflavina ha penetrado en la cámara anterior, mediante la observación
de un color amarillento en la misma [Hayes et al., 2008].
Actualmente, los parámetros estándar recomendados por las casas comerciales
que fabrican los aparatos y por los investigadores que han desarrollado la técnica,
son [Wollensak and Iomdina, 2009a]:
• Desepitelización o escarificación epitelial previa
• Impregnación de riboflavina 0,1%: 1 gota cada 5 minutos durante 30 minutos
o hasta verificación de penetración total (presencia de tinción amarillenta en
cámara anterior)
• Intensidad de radiación: 3 mW/cm2
• Longitud de onda UVA: 360-380 nm
110
Modelado del ojo humano y tratamientos refractivos
• Tiempo de irradiación corneal: 30 minutos
• Diámetro del haz de luz UVA: 9 mm
Figura 3.23: Micrografı́a de córnea de cerdo tratada con cross-linking corneal. Se
distinguen tres capas tras la hidratación: capa superficial sin edema (a), capa intermedia con edema moderado (b) y capa más profunda muy edematizada (c) [Wollensak et al., 2007].
Para evaluar los efectos de este tratamiento y optimizar los parámetros del
tratamiento estándar han sido desarrollados diversos estudios, analizando los resultados clı́nicos, histológicos y estructurales. Los efectos observados más relevantes
son la ralentización o detención de la evolución del queratocono y el incremento en
la rigidez del tejido [Wollensak, 2006; Spoerl et al., 1998]. En la región de tejido
en la que ha penetrado el tratamiento, unas 300 µm, se produce apoptosis celular
de los queratocitos, contracción del tejido y disminución del nivel de hidratación
[Spoerl et al., 2007; Wollensak et al., 2007]. En la Figura 3.23 puede apreciarse el
efecto microestructural del tratamiento: la capa externa (a) de espesor 242±23µm,
corresponde al tejido en que ha penetrado totalmente el tratamiento, presentando
deshidratación, compactación y muerte de los queratocitos; la capa más interna (c)
de espesor 1355±56µm, presenta un evidente edema, y entre ambas se observa una
zona de transición (b) de espesor 238±16µm, con edema moderado.
En vista de estos efectos, la forma de evaluar el tratamiento ha sido planteada
de diversas formas. Desde el punto de vista histológico, se ha medido la profundidad corneal alcanzada según el grado de muerte celular y el nivel de agua en el
tejido [Wollensak et al., 2007]. Desde el punto de vista estructural, diversos autores
han realizado ensayos de tracción uniaxial de tejido corneal tratado, modificando
los parámetros estándar (longitud de onda, tiempo de irradiación, fotosensibilizador
utilizado [Spoerl et al., 1998]) o aplicándolo a ojos de distintas especies (conejo,
cerdo, caballo, etc.) [Wollensak et al., 2003b; Wollensak and Iomdina, 2009b]. El
Capı́tulo 3. Tratamientos refractivos
111
Figura 3.24: Tejido corneal tratado con CXL (izquierda) y no tratado (derecha). El
tejido tratado muestra adelgazamiento, mayor rigidez y color amarillento debido a
la impregnación de riboflavina. Imagen de Wollensak et al. [2003a].
tejido corneal humano es evidentemente, por razones éticas, difı́cil de conseguir. Sin
embargo, algunos trabajos han sido presentados para evaluar la respuesta mecánica
in vitro del tejido corneal humano tras aplicación de tratamiento de CXL, concluyendo que se logra rigidizar hasta 4 veces el tejido [Wollensak et al., 2003b]. En
la Figura 3.24 se pueden observar dos muestras de tejido corneal, una de ellas ha
recibido tratamiento de CXL y la otra no. Las diferencias son notables a simple
vista: el tejido tratado muestra color amarillento debido a la impregnación de riboflavina, adelgazamiento a causa de la contracción del tejido por los nuevos enlaces
de colágeno y la deshidratación, y mayor rigidez.
En los últimos tres años el CXL de colágeno corneal ha sido aplicado para el
tratamiento del tejido debilitado por ectasias corneales como queratocono [Wollensak, 2006], degeneración marginal pelúcida, queratectasia iatrogénica tras cirugı́a
refractiva mediante laser in situ keratomileusis (LASIK) [Hafezi et al., 2007], etc.
Hoy en dı́a se investigan nuevas aplicaciones para el CXL corneal, como la queratitis
[Iseli et al., 2008], la queratopatı́a bullosa [Krueger et al., 2008], el retratamiento posterior en una segunda sesión o su combinación con otros tratamientos [Chan et al.,
2007], como el implante de segmentos de anillos intraestromales que se expone en el
siguiente apartado.
Sin embargo, el efecto en tejido corneal con un alto grado de daño o en córneas
con un tratamiento previo de CXL no está suficientemente investigado, por lo que
las consecuencias serı́an inciertas.
3.3.3
Técnicas combinadas para el tratamiento del queratocono.
Algunos pacientes presentan patologı́as que requieren la aplicación combinada
de distintos tratamientos, quirúrgicos o no. De esta forma, se realizan cirugı́as
combinadas de catarata con glaucoma; queratoplastia y catarata, etc [Palomino,
2008].
112
Modelado del ojo humano y tratamientos refractivos
En el caso del queratocono, los tratamientos de implante de segmentos de anillos corneales intraestromales (ICRS) y cross-linking (CXL) del colágeno corneal,
expuestos en los apartados anteriores, se está valorando en la actualidad su aplicación
de forma combinada con el objetivo de sumar sus efectos para tratar de detener la
evolución de la patologı́a.
Chan et al. [2007] realizaron un estudio comparativo de dos grupos de casos de
pacientes con queratocono, uno tratado con implantación de segmentos Intacs y otra
con la misma técnica seguida de CXL. En el grupo tratado con ambas técnicas se
obtuvo mejores resultados que en el grupo tratado únicamente con la inserción de
ICRS: mayor reducción del astigmatismo y mejora de la refracción.
La observación clı́nica sugiere que el efecto de aplanamiento corneal de la aplicación combinada de los tratamientos de ICRS y CXL puede ser aditivo. Sin embargo, no se ha descrito la forma óptima de llevar a cabo el procedimiento. La
simultaneidad o no de ambos tratamientos, el periodo óptimo entre uno y otro y el
orden en que deben realizarse es todavı́a motivo de estudio. Si se realiza primero
la cirugı́a de inserción de ICRS, puesto que en algunos se alcanza el máximo efecto
de aplanamiento a los seis meses de su implantación, parece lógico esperar como
mı́nimo este plazo antes de efectuar un tratamiento de CXL.
En conclusión, a pesar de la demostrada efectividad de estos dos tratamientos de
forma aislada, mejorando los parámetros clı́nicos y refractivos de córneas ectásicas,
todavı́a es pronto para afirmar con rotundidad que la combinación de inserción de
ICRS y CXL sea verdaderamente exitosa para controlar la evolución del queratocono
y sus consecuencias sobre la calidad de vida del paciente, por lo que se debe seguir
investigando hasta alcanzar pautas óptimas que garanticen la máxima efectividad y
mı́nimo riesgo, a largo plazo.
Capı́tulo 4
Modelado numérico de los tejidos
del globo ocular
El comportamiento mecánico de los tejidos del globo ocular se puede enmarcar
dentro del correspondiente al grupo de los tejidos biológicos blandos. Dicho comportamiento ha sido ampliamente estudiado en la bibliografı́a por diversos autores como
Lanir [1979]; Fung [1993]; Pioletti [1997]; Provenzano et al. [2002], etc. y en concreto, para el tejido corneal (Pinsky and Datye [1991]; Bryant and McDonnell [1996];
Pandolfi and Manganiello [2006], etc) o para el modelado del cristalino humano
(Dubbelman et al. [2003]; Burd et al. [2006]; Ljubimova et al. [2007]; Burd [2009],
etc). Actualmente, está cientı́ficamente aceptado que una formulación lagrangiana
hiperelástica anisótropa es capaz de reproducir el comportamiento elástico de este
tipo de tejidos ante cargas fisiológicas. Este modelo de comportamiento ha sido
comúnmente utilizado en biomecánica, por ejemplo por Weiss et al. [1996], Peña
et al. [2006a], para la simulación del comportamiento de ligamentos; por PérezDel-Palomar and Doblaré [2006], para el cartı́lago; por Holzapfel and Gasser [2000],
para la simulación del comportamiento de las paredes arteriales; y por Alastrué et al.
[2006] en el de la córnea. En los primeros apartados de este capı́tulo, se exponen
las principales caracterı́sticas mecánicas de los tejidos biológicos blandos y las ecuaciones que definen el comportamiento hiperelástico anisótropo. En el apartado 4.4
se describe una metodologı́a para la imposición de las tensiones residuales en tejidos
biológicos de geometrı́as complejas, en el contexto de la Mecánica Computacional,
y que en el caso particular de la córnea permitirá establecer las condiciones iniciales
en el proceso de simulación de las diferentes técnicas quirúrgicas presentadas en el
Capı́tulo 6.
Dado que hay situaciones mecánicas en las cuales esta formulación elástica es
incapaz de simular numéricamente algunos procesos experimentados por estos tejidos, también se describe un modelo de comportamiento dependiente del tiempo, es
decir, viscohiperelástico. Este modelo de comportamiento es necesario cuando se
pretenden simular numéricamente ciertas técnicas quirúrgicas, como ocurre en la
determinación de la curvatura final de la córnea después del proceso post-operatorio
de una cirugı́a LASIK para la corrección de la miopı́a, o bien para caracterizar
113
Modelado del ojo humano y tratamientos refractivos
114
(a)
(b)
Figura 4.1: (a) Representación esquemática de la curva tensión vs. deformación. (b)
Curvas obtenidas por Hoeltzel et al. [1992] para córnea de oveja, conejo y humano.
el comportamiento mecánico del tejido ante diferentes velocidades de deformación,
por ejemplo para la simulación numérica de la medida de parámetros biomecánicos
corneales mediante ORA (ver apartado 2.3.1).
4.1
Comportamiento mecánico de los tejidos blandos
El desarrollo de modelos constitutivos lo más realistas posibles requiere el conocimiento de las propiedades y de la respuesta mecánica de los tejidos. En este
apartado se resumen las propiedades y fenómenos mecánicos más representativos
del comportamiento de los tejidos blandos, y por ende del tejido corneal, escleral
y del cristalino. Para un conocimiento más extenso se recomienda consultar los
trabajos de Fung [1993]; Humphrey [2002] y las referencias citadas (Weiss et al.
[1996]; Holzapfel and Gasser [2000], etc.).
Propiedades elásticas. En general, tienen un comportamiento anisótropo debido a la orientación preferencial de las fibras de colágeno. Desde el punto de
vista microscópico, son materiales heterogéneos, como consecuencia de su estructura
variable en cada punto. Ante cargas fisiológicas normales experimentan grandes deformaciones. Su comportamiento no-lineal se ha atribuı́do al patrón ondulado de
las fibrillas de colágeno y al patrón no alineado de las fibras individuales. La Figura
4.1 (a) representa, de forma esquemática, la curva tensión vs. deformación elástica
tı́pica de los tejidos biológicos blandos, donde se observa que la curva puede dividirse
en tres fases:
Capı́tulo 4. Modelado numérico de los tejidos del globo ocular
115
Figura 4.2: Ensayo de apertura de ángulo en una arteria carótida.
• La región OA o “pie” de la curva puede presentar hasta un 5, 5% de deformación en el tejido corneal (Figura 4.1 (b)). El rango fisiológico, en el cual el
tejido funciona normalmente, pertenece a la región inicial de este tramo. En la
fase OA del ensayo, fuerzas iniciales de pequeña magnitud provocan un gran
alargamiento, debido a que el arrollamiento de las fibras es fácil de deshacer.
Se interpreta a menudo como la región en la cual las ondulaciones de las fibras
se enderezan en la dirección de la carga aplicada.
• En la región lineal AB las fibras, ya enderezadas, se alargan elásticamente.
A partir de este momento, se necesita una mayor fuerza para provocar un
alargamiento de las mismas. El valor tangente se toma como la rigidez elástica
del tejido a partir del cual puede calcularse el módulo elástico del mismo. Debe
tenerse en cuenta, sin embargo, que éste será un valor instantáneo, en función
de la velocidad de deformación del ensayo, dada la naturaleza viscoelástica de
estos tejidos que se comenta posteriormente.
• En la región BC la relación entre tensión y deformación deja de ser lineal. En
ese momento, se produce la desorganización de las fibras, ası́ como la rotura
de las mismas. La curva termina al producirse la rotura del tejido.
Finalmente, el elevado porcentaje de agua les confiere un comportamiento prácticamente incompresible. Junto a la complejidad estructural de estos materiales, es
necesario añadir que sus propiedades mecánicas se ven fuertemente influenciadas por
otros factores como la topografı́a, edad, especie, contenido de humedad, temperatura, pH, velocidad de deformación, etc. Por este motivo, la estandarización de los
ensayos conlleva una gran dificultad, siendo necesario trabajar con valores promedio
y asumir una amplia variación en los mismos.
Tensiones residuales. En general, los tejidos no se encuentran libres de tensiones
en la configuración de referencia. Estas tensiones iniciales son debidas fundamentalmente al crecimiento, remodelación, daño o deformaciones viscoplásticas que se
desarrollan durante toda la vida, comenzando en el inicio de la formación de los
tejidos y órganos durante la gestación [Fung, 1993].
116
Modelado del ojo humano y tratamientos refractivos
Figura 4.3: Apertura de córnea de cerdo.
Por ejemplo, como puede observarse en la Figura 4.2, cuando un vaso sanguı́neo
se corta transversalmente sufre una contracción en la dirección longitudinal, y si
dicho corte se realiza longitudinalmente en anillo, éste se abre relajando las tensiones circunferenciales. La misión de estas tensiones residuales es reducir la tensión
circunferencial interna y el gradiente de tensiones en la pared arterial bajo tensiones fisiológicas [Chaudhry et al., 1997]. Otro ejemplo de estas tensiones puede
observarse en los ligamentos, en los cuales, cuando son desinsertados, se modifican
su geometrı́a y tamaño, relajándose hasta alcanzar un estado de equilibrio libre de
tensiones [Gardiner et al., 2001].
Análogamente, puede observarse que, al practicar una incisión longitudinal según
un eje aleatorio de una córnea, las dos partes en que queda dividida modifican la
curvatura de su periferia incidida, lo que indica que se han liberado las tensiones
existentes en esa región del tejido. La Figura 4.3 muestra este ensayo en una córnea
de cerdo. Como puede deducirse de las Figuras 4.2 y 4.3, las tensiones iniciales en el
tejido corneal son muy pequeñas comparadas con las existentes en la carótida, si bien
los trabajos de Heistand et al. [2006] y David and Humphrey [2007] muestran que
la cápsula anterior de cerdo está significativamente pretensionada bajo condiciones
normales (entre un 10 y un 12% biaxialmente).
Fenómenos inelásticos. La mayorı́a de estos tejidos muestran un comportamiento
viscoelástico (tensión dependiente de la velocidad de deformación), el cual es atribuido a la interacción tangencial del colágeno con la matriz de proteoglicanos, es
decir, la matriz actúa como un lubricante viscoso entre las fibras de colágeno. Ası́
mismo, si el tejido se carga hasta una longitud determinada y ésta se mantiene
constante, se observa que, con el tiempo, la tensión se relaja desde la tensión inicial
hasta la tensión de equilibrio, como muestra la Figura 4.4. Otro ensayo interesante
consiste en realizar ciclos de carga y descarga a velocidad de deformación constante,
dejando cortos periodos de relajación entre cada ciclo. Se observa que las curvas
correspondientes a los ciclos realizados se van desplazando hacia la derecha, con un
aumento de la región del “pie”, una disminución de la histéresis, y un aumento de la
pendiente de la región lineal de las curvas. La disminución de la histéresis significa
Capı́tulo 4. Modelado numérico de los tejidos del globo ocular
1
λ=1.0789
λ=1.1089
λ=1.1388
λ=1.1689
λ=1.199
0.8
σf/σ0
117
0.6
0.4
0.2
0
200
400
600
tiempo
(a) Relajación
800
1000
(b) Influencia de la velocidad
Figura 4.4: Comportamiento viscoelástico del tejido corneal.
Figura 4.5: Histologı́a de la cabeza de nervio óptico de mono. El ojo izquierdo (figura
izquierda), bajo PIO normal de 10 mmHg. En el ojo derecho (figura derecha) se
provocó un aumento súbito de PIO hasta 30 mmHg, mantenida durante 15 minutos,
causando daño en el tejido y una deformación permanente en la lamina cribosa
[Bellezza et al., 2003].
que la energı́a mecánica consumida en cada ciclo disminuye, mientras que el aumento
de pendiente en la región lineal indica un aumento de la rigidez del material. Por
otra parte, el ensayo de relajación de tensión para cada uno de los ciclos citados,
muestra que la carga relajada aumenta después de cada uno de ellos. En estos casos
se dice que el tejido está precondicionado. La razón del precondicionamiento reside
en el carácter viscoelástico de estos tejidos y en los cambios que tienen lugar en su
estructura durante los primeros ciclos. Al cabo de un cierto número de ciclos se alcanza el equilibrio. Por último, el comportamiento del tejido depende de la velocidad
de deformación, encontrándose que, para altas velocidades, estos tejidos se rigidizan
para evitar que las fibras de colágeno alcancen deformaciones excesivas que puedan
dar lugar al daño del tejido (Figura 4.4). En la Figura 4.4 (b) puede observarse
que, a mayor velocidad de ensayo, el tejido corneal muestra un comportamiento más
rı́gido.
Crecimiento y remodelación. Los tejidos tienen la capacidad de modificar su
estructura y comportamiento en función del ambiente y los estı́mulos mecánicos,
Modelado del ojo humano y tratamientos refractivos
118
biológicos o quı́micos que los rodean Taber [1995]. El crecimiento tiene lugar cuando
se producen cambios en la masa y/o volumen tanto de las células como de la matriz extracelular, y la remodelación, cuando se produce una modificación de la microestructura sin modificar su tamaño y forma. Un ejemplo del fenómeno de daño
puede apreciarse en la Figura 4.5, en la que un aumento brusco de la PIO causa
daño en los tejidos de la cabeza del nervio óptico, provocando un glaucoma.
4.2
Modelado del comportamiento elástico
En este apartado se resumen las ecuaciones que definen el modelo de comportamiento hiperelástico anisótropo habitualmente empleado en la simulación de
tejidos biológicos blandos. Dicho modelo estructural se plantea en el marco de la
mecánica del continuo no lineal, y teniendo en cuenta la posibilidad de ser incorporado en un código de elementos finitos. Para ello, se ha considerado la descomposición octaédrico-desviadora del gradiente de deformación, propuesta inicialmente
por Flory [1961] y generalizada por Simo and Taylor [1991], para evitar problemas
numéricos debidos a la incompresibilidad inherente a dichos tejidos, es decir, J ' 1.
La anisotropı́a se define en función de invariantes que dependen del tensor de deformación y de las direcciones de comportamiento preferencial del material, tal como
propuso Spencer [1954].
4.2.1
Descripción de la deformación
En la formulación de Mecánica de Medios Continuos se entiende por sólido tridimensional, Ω, a un subconjunto de R3 cuyos puntos se identifican mediante sus
coordenadas en un sistema de referencia. Matemáticamente, podemos interpretar lo
anterior a través de una función biunı́voca de tres componentes ϕo aplicada sobre
el sólido Ω tal que, a cada punto P ∈ Ω, adscribe tres valores que corresponden a
las coordenadas de dicho punto P en el sistema de referencia elegido, es decir
ϕo : Ω → R3
ϕo ≡ X;
ϕIo = X I
(4.1)
A ϕo la denominaremos configuración inicial del sólido Ω0 , configuración de referencia o configuración indeformada. A lo largo del movimiento del sólido, la posición
de cada uno de los puntos del mismo va variando; la configuración correspondiente
define las coordenadas de los puntos del sólido en ese instante Ωt respecto a un
sistema de referencia (que en general también puede variar con el tiempo) a través
de una expresión similar a (4.1), es decir
ϕt : Ω → R3
ϕt ≡ x;
ϕIt = xi
con t ∈ I ∈ R
(4.2)
Capı́tulo 4. Modelado numérico de los tejidos del globo ocular
119
A ϕt la denominaremos configuración actual del sólido Ωt o configuración deformada.
Dado un movimiento ϕt : Ω → R3 C 1 −regular (es decir, con derivada primera
continua y con inversa, asimismo, con derivada primera continua), se define el gradiente de deformación, F, como el campo tensorial sobre la configuración indefordx
, siendo J ≡ detF > 0 el jacobiano de la transformación
mada ϕo (Ω), F = dX
φ : ϕ 0 → ϕt .
Siguiendo a Flory [1961], definimos la siguiente descomposición multiplicativa
del gradiente de deformación
1
F = J 3 F̄,
1
F̄ = J − 3 F
− 32
C = F̄T F̄
C = FT F,
C̄ = J
b = FFT ,
b̄ = J − 3 b = F̄F̄T
2
(4.3)
(4.4)
(4.5)
1
El término J 3 I representa la deformación volumétrica y F̄ la deformación desviadora. Denotamos por F̄, C̄ y b̄ al gradiente de deformación y los tensores de
deformación Cauchy-Green por la derecha e izquierda modificados, respectivamente.
Para considerar la anisotropı́a del material, la dirección de la fibras en un punto
X ∈ Ω0 se define por un vector unitario m0 (X), |m0 | = 1. Se supone que las fibras
se mueven de forma conjunta con la matriz extracelular, por lo que, el alargamiento
λ de la fibra definido como la relación entre las longitudes de las fibras en las configuraciones deformada y de referencia puede ser expresado mediante
λm(x, t) = F(X, t)m0 (X)
λ2 = m0 .FT F.m0 = m0 .C.m0
(4.6)
donde m es el vector unitario que define la fibra en la configuración deformada
(Figura 4.6).
De forma similar, puede definirse la cinemática de otra familia de fibras definida
por su vector direccional particular n0 . Como se vio en el Capı́tulo 2, el comportamiento de la córnea queda definido por dos familias de fibras, mientras que la
cápsula del cristalino queda definida por una única familia.
4.2.2
Respuesta tensional hiperelástica
Para caracterizar un proceso isotermo en materiales reversibles, sin disipación
de energı́a, se suele postular la existencia de una única representación de la función
densidad energı́a de deformación desacoplada Ψ [Simo and Taylor, 1985]. A partir de
la hipótesis cinemática (4.3) y siguiendo a Spencer [1954], ésta puede definirse para
materiales con dos familias de fibras preferenciales en función de nueve invariantes
dependientes de los tensores C̄, M, N con la definición de los tensores estructurales
M = m0 ⊗ m0 y N = n0 ⊗ n0 .
De igual forma que el gradiente de deformación, la energı́a de deformación desa-
Modelado del ojo humano y tratamientos refractivos
120
Figura 4.6: Definición de la anisotropı́a en función del vector m0
(a)
(b)
Figura 4.7: (a) Lamelas que componen el estroma corneal [Pinsky et al., 2005]. En
cada lamela, las fibras de colágeno transcurren paralelas, embebidas en una matriz
extrafibrilar y unidas entre sı́ por proteoglicanos. La dirección de las fibras en cada
lamela se indica según el vector A. (b) Aumento ×6.200 de la superficie de colágeno
corneal (imagen de Komai and Ushiki [1991a] en Studer et al. [2010]). La flecha roja
indica los enlaces denominados cross-links entre fibras adyacentes.
Capı́tulo 4. Modelado numérico de los tejidos del globo ocular
121
Figura 4.8: Direcciones de las fibras de colágeno. Izquierda: familias m0 y n0
de la córnea, que representan las direcciones ortogonales superior-inferior y nasaltemporal, respectivamente. Derecha: familia n0 del limbo, que presenta una orientación circunferencial.
coplada se expresa como
Ψ = Ψvol (J) + Ψ̄(C̄, m0 ⊗ m0 , n0 ⊗ n0 )
= Ψvol (J) + Ψ̄(I¯1 , I¯2 , I¯4 , I¯5 , I¯6 , I¯7 , I¯8 , I¯9 )
(4.7)
con Ψvol y Ψ̄ la parte volumétrica y desviadora de la función densidad de energı́a de
deformación, respectivamente y
1
2
I¯1 = tr C̄, I¯2 = (tr (C̄)2 − tr C̄ )
2
2
¯
I4 = m0 .C̄.m0 , I¯5 = m0 .C̄ .m0 , I¯6 = n0 .C̄.n0
2
I¯7 = n0 .C̄ .n0 , I¯8 = m0 .C̄.n0 , , I¯9 = (n0 .m0 )2
(4.8)
I¯1 y I¯2 son el primer y segundo invariante del tensor simétrico de Cauchy-Green
por la derecha modificado y I¯4 , . . ., I¯9 los pseudo-invariantes que caracterizan la
anisotropı́a asociada a las fibras. I¯4 y I¯6 tiene un claro significado fı́sico ya que
se definen como la longitud de la fibras al cuadrado, I¯5 y I¯7 están asociados a la
deformación transversal de las fibras, I¯8 representa la interacción entre las dos familias de fibras y I¯9 es realmente una constante que sólo depende de la configuración
inicial y no de la deformación. Es norma habitual en biomecánica omitir la dependencia de la función Ψ de los invariantes I¯5 , I¯7 , I¯8 y I¯9 , como consecuencia de la
fuerte correlación de I¯5 con I¯4 y de I¯7 con I¯6 , y que tampoco se suele considerar la
interacción entre las dos familias de fibras [Pinsky and Datye, 1991; Pandolfi and
Manganiello, 2006]. Con esto se consigue disminuir el número de parámetros del
material y, por lo tanto, facilitar el ajuste con los resultados experimentales, además
de trabajar únicamente con aquellos que poseen interpretación fı́sica. En lo que
sigue, se planteará la formulación únicamente considerando los invariantes I¯4 y I¯6 .
La respuesta en tensiones se puede obtener a partir de la función densidad energı́a
Modelado del ojo humano y tratamientos refractivos
122
de deformación teniendo en cuenta la desigualdad de Clausius-Planck
1
Dint = −Ψ̇ + S : Ċ ≥ 0
2
(4.9)
mediante
S=2
2
∂Ψ
= Svol + S̄iso = JpC−1 + J − 3 (I − 1/3C−1 ⊗ C) : S̄
∂C
2
= JpC−1 + J − 3 DEV [S̄]
(4.10)
donde p es la presión hidrostática, DEV el operador desviador en descripción material y S̄ el tensor de tensiones de Piola-Kirchhoff modificado [Holzapfel and Gasser,
2000]
p=
dΨvol (J)
dJ
S̄ = 2
∂ Ψ̄(C̄, m0 , n0 )
∂ C̄
(4.11)
El valor del segundo tensor de Piola-Kirchhoff en función de los invariantes I¯1 ,
I¯2 , I¯4 y I¯6 viene dado por
∂ Ψ̄
S =JpC−1 + 2[( ¯
∂ I1
∂
Ψ̄
I¯6 ¯ n0 ⊗ n0 −
∂ I6
∂ Ψ̄
∂ Ψ̄
∂ Ψ̄
+ I¯1 ¯ )1 − ¯ C + I¯4 ¯ m0 ⊗ m0 +
∂ I2
∂ I2
∂ I4
1 ∂ Ψ̄ ¯
∂ Ψ̄ ¯
∂ Ψ̄
∂ Ψ̄ ¯
( ¯ I1 + 2 ¯ I2 + ¯ I4 + ¯ I¯6 )C−1 ]
3 ∂ I1
∂ I2
∂ I4
∂ I6
(4.12)
El tensor de tensiones de Cauchy σ es 1/J veces el empuje (push-forward ) de S
(σ = J −1 χ∗ (S)), o en notación indicial, σij = J −1 FiI FjJ SIJ . Utilizando la relación
entre el operador DEV [•], definido en la descripción material, y el operador dev[•],
definido en la espacial [Simo and Hughes, 1998]
J −2/3 F(DEV [•])FT = dev[F̄(•)F̄T ]
(4.13)
se obtiene la descripción espacial de (4.12), es decir, el tensor de Cauchy
σ = p1 +
∂ Ψ̄(C̄, m0 , n0 ) T
2
F̄ ]
dev[F̄
J
∂ C̄
(4.14)
con 1 el tensor identidad de segundo orden. Operando, se obtiene
∂ Ψ̄
∂ Ψ̄
∂ Ψ̄
2 ∂ Ψ̄ ¯ ∂ Ψ̄
[( ¯ + I1 ¯ )b − ¯ b2 + I¯4 ¯ m ⊗ m + I¯6 ¯ n ⊗ n
J ∂ I1
∂ I2
∂ I2
∂ I4
∂ I6
∂ Ψ̄
∂ Ψ̄
1 ∂ Ψ̄
∂ Ψ̄
− ( ¯ I¯1 + 2 ¯ I¯2 + ¯ I¯4 + ¯ I¯6 )1]
3 ∂ I1
∂ I2
∂ I4
∂ I6
σ =p1 +
(4.15)
Capı́tulo 4. Modelado numérico de los tejidos del globo ocular
4.2.3
123
Tensor de comportamiento elástico
Para obtener la solución numérica del problema no lineal empleando una técnica
iterativa tipo Newton, es necesario obtener la linealización de las ecuaciones constitutivas. Dicha técnica fue introducida en el campo de la mecánica de sólidos por
Hughes and Pister [1978].
Conocido el segundo tensor de tensiones de Piola-Kirchhoff S en un punto, su
variación con respecto al tensor de Cauchy-Green por la derecha C puede escribirse
en la forma
1
(4.16)
dS = C : dC
2
∂S(C)
(4.17)
C=2
∂C
con C el tensor elástico en la configuración material [Ogden, 1996]. Partiendo de
la ecuación (4.10) se obtiene la contribución volumétrica y desviadora del tensor
respectivamente
∂Svol
∂ S̄
+2
(4.18)
C = Cvol + C̄ = 2
∂C
∂C
donde Cvol y C̄ pueden escribirse de la forma siguiente [Simo and Hughes, 1998]
∂p
∂J
∂C−1
+J
+ 2Jp
)
∂C
∂C
∂C
= Jp̃C−1 ⊗ C−1 − 2JpC−1 ¯ C−1
Cvol = 2C−1 ⊗ (p
∂ Ψ̄
4 4 ∂ Ψ̄
⊗ C̄−1 + C̄−1 ⊗
)+
C̄ = − J − 3 (
3
∂ C̄
∂ C̄
4
1 −1
4 4 ∂ Ψ̄
: C̄)(I−1
⊗ C̄−1 ) + J − 3 C̄w̄
+ J−3 (
C − C̄
3
3
∂ C̄
4 ∂ 2 Ψ̄
∂ 2 Ψ̄
∂ 2 Ψ̄
−1
−1
− [(
: C̄) ⊗ C̄ + C̄ ⊗ (
: C̄)]
C̄w̄ = 4
∂ C̄∂ C̄ 3 ∂ C̄∂ C̄
∂ C̄∂ C̄
∂ 2 Ψ̄
4
: C̄)C̄−1 ⊗ C̄−1
+ (C̄ :
9
∂ C̄∂ C̄
(4.19)
(4.20)
(4.21)
−1
−1 −1
−1 −1
= −C−1 ¯ C−1 = − 21 (CIK
con IC −1 = ∂C
CJK ). Por conveniencia, se
CJL + CIL
∂C
introduce la función escalar p̃, definida por
p̃ = p + J
dp
dJ
(4.22)
con la ecuación constitutiva para p dada por (4.11.a).
El tensor elástico en la configuración espacial, denotado por C , se define como el
Modelado del ojo humano y tratamientos refractivos
124
empuje (push-forward ) de C escalado por el factor J −1 , esto es
C
= J −1 χ∗ (C),
Cabcd
= J −1 FaA FbB FcC FdD CABCD
(4.23)
Operando, se obtiene la expresión volumétrica y desviadora en la configuración
deformada
(4.24)
C = C vol + C̄
con
C vol
= (p̃1 ⊗ 1 − 2pI),
p̃ = p + J
dp
dJ
(4.25)
2
2
= tr(σ̄)P − (1 ⊗ σ̄ + σ̄ ⊗ 1) + C w̄
(4.26)
3
3
: σ siendo P el tensor proyección en la configuración espacial
C̄
el valor de σ̄ =
respectivamente
P
P
1
=I− 1⊗1
3
(4.27)
es el empuje (push-forward ) de C̄w̄ . Operando llegamos a la expresión del tensor
constitutivo desviador (4.28) expresado en función de los invariantes I¯1 , I¯2 , I¯4 y I¯6 .
C̄ w̄
C̄
4
2
[(Ψ̄1 + Ψ̄2 I¯1 )I¯1 − Ψ̄2 (I¯12 − 2I¯2 ) + Ψ̄4 I¯4 +
= − (devσ ⊗ 1 + 1 ⊗ devσ) −
3
3J
1
Ψ̄6 I¯6 ](I − 1 ⊗ 1) + 4[(Ψ̄11 + 2Ψ̄12 I¯1 + Ψ̄2 + Ψ̄22 I¯12 )b̄ ⊗ b̄−
3
(Ψ̄12 + Ψ̄22 I¯1 )(b̄ ⊗ b̄2 + b̄2 ⊗ b̄) + Ψ̄22 (b̄2 ⊗ b̄2 ) − Ψ̄2 Ib̄ +
(Ψ̄14 + Ψ̄24 I¯1 )I¯4 (b̄ ⊗ m ⊗ m + m ⊗ m ⊗ b̄)+
(Ψ̄16 + Ψ̄26 I¯1 )I¯6 (b̄ ⊗ n ⊗ n + n ⊗ n ⊗ b̄)−
Ψ̄22 I¯4 (b̄2 ⊗ m ⊗ m + m ⊗ m ⊗ b̄2 )+
Ψ̄44 I¯42 (m ⊗ m ⊗ m ⊗ m) − Ψ̄22 I¯6 (b̄2 ⊗ n ⊗ n + n ⊗ n ⊗ b̄2 )+
Ψ̄66 I¯62 (n ⊗ n ⊗ n ⊗ n)−
4
[(Ψ̄11 I¯1 + Ψ̄12 I¯12 + Ψ̄12 I¯2 + Ψ̄2 I¯1 + 2Ψ̄22 I¯1 I¯2 + Ψ̄14 I¯4 + Ψ̄24 I¯1 I¯4 +
3
Ψ̄16 I¯6 + Ψ̄26 I¯1 I¯6 )b̄ − (Ψ̄12 I¯1 + 2Ψ̄22 I¯2 + Ψ̄2 + Ψ̄24 I¯4 + Ψ̄26 I¯6 )b̄2 +
(Ψ̄14 I¯1 + 2Ψ̄22 I¯2 + Ψ̄44 I¯4 )m ⊗ m ⊗ b̄ + (Ψ̄16 I¯1 + 2Ψ̄22 I¯2 +
Ψ̄66 I¯6 )n ⊗ n ⊗ b̄+
1 ⊗ ((Ψ̄11 I¯1 + Ψ̄12 I¯2 + Ψ̄12 I¯2 + Ψ̄2 I¯1 + 2Ψ̄22 I¯1 I¯2 + Ψ̄14 I¯4 + Ψ̄24 I¯1 I¯4 +
1
Ψ̄16 I¯6 + Ψ̄26 I¯1 I¯6 )b̄ − (Ψ̄12 I¯1 + 2Ψ̄22 I¯2 + Ψ̄2 + Ψ̄24 I¯4 + Ψ̄26 I¯6 )b̄2 +
(Ψ̄14 I¯1 + 2Ψ̄24 I¯2 + Ψ̄44 I¯4 )m ⊗ m) + (Ψ̄16 I¯1 + 2Ψ̄26 I¯2 + Ψ̄66 I¯6 )n ⊗ n)]+
4
[((Ψ̄11 − Ψ̄12 )I¯12 + 2Ψ̄2 I¯2 + 4Ψ̄22 I¯22 + 4Ψ̄12 I¯1 I¯2 + 2Ψ̄14 I¯1 I¯4 +
9
(4.28)
2Ψ̄16 I¯1 I¯6 + 4Ψ̄24 I¯2 I¯4 + Ψ̄44 I¯42 + 4Ψ̄26 I¯2 I¯6 + Ψ̄66 I¯62 )1 ⊗ 1]
Capı́tulo 4. Modelado numérico de los tejidos del globo ocular
125
2
donde se ha utilizado la notación Ψ̄i = ∂∂IΨ̄¯i y Ψ̄ij = ∂∂I¯i ∂Ψ̄I¯j y con (Ib̄ )ijkl = − 21 (b̄ik b̄jl +
b̄il b̄jk ).
Si el material se considera incompresible, es decir, el volumen de material no cambia
durante la deformación, se cumple que J = 1. En la formulación anterior habrı́a
entonces que sustituir Ψvol , que depende del Jacobiano, por la restricción de incompresibilidad multiplicada por un multiplicador de Lagrange p adecuado. De esta
forma p ya no está definida mediante una ecuación constitutiva como en (4.11.a),
sino que pasa a ser una incógnita del problema. En este caso es habitual recurrir a
una formulación mixta (u, p, θ) en elementos finitos para la resolución del problema
[Simo, 1987]. Con la condición de incompresibilidad J = 1, se tiene
1
Ψ = p(I3 − 1) + Ψ̄
2
S =pJC −1 + S̄
σ =p1 + σ̄
C =pJ(C −1 ⊗ C −1 − 2IC −1 ) + C̄
C
4.2.4
=p(1 ⊗ 1 − 2I) + C̄
(4.29)
Modelos hiperelásticos para los tejidos del globo ocular
La mayorı́a de los modelos propuestos son modelos fenomenológicos, es decir,
que describen del tejido a nivel macroscópico capturando la respuesta del mismo
a nivel fisiológico a partir del ajuste de ensayos experimentales. La mayorı́a de
ellos describen la función densidad de energı́a de deformación a través de funciones
exponenciales, polinomiales o logarı́tmicas. Algunas de estas funciones tienen el
inconveniente de que, para algunas combinaciones de parámetros de material, no son
convexas o continuas, y por tanto, prácticamente no son empleadas en el modelado
de tejidos. En este apartado se presentan las funciones utilizadas en la tesis para el
modelado de los tejidos del globo ocular. Para cada uno de los tejidos se muestra
un ejemplo de la capacidad de estas funciones para reproducir el comportamiento
de datos experimentales obtenidos a partir de ensayos experimentales.
Córnea
Dado el carácter exponencial claramente marcado de las curvas de comportamiento obtenidas para la córnea, el modelo de comportamiento que se emplea
habitualmente para ésta es el modelo de Holzapfel en su versión simplificada y que
Modelado del ojo humano y tratamientos refractivos
126
Figura 4.9: Curvas tensión-alargamiento obtenidas para una muestra de tejido
corneal.
fue propuesto por primera vez para el modelado de córnea por Alastrué et al. [2006]
C1 ¯
C2 ¯
(I1 − 3) +
(I2 − 3)+
2
2
C5
C3
{exp[C4 (I¯4 − 1)2 ] − 1} +
{exp[C6 (I¯6 − 1)2 ] − 1}
+
2C4
2C6
Ψ̄ =
(4.30)
En la Figura 5.5 se puede observar la capacidad del modelo para ajustar los resultados experimentales.
Limbo
Se utiliza el mismo modelo de comportamiento presentado para la córnea, pero
con una única familia de fibras que presentan dirección circunferencial. Los valores
asignados a los parámetros se muestran en la Tabla 4.1.
Ψ̄ =
C1 ¯
C2 ¯
C3
(I1 − 3) +
(I2 − 3) +
{exp[C4 (I¯4 − 1)2 ] − 1}
2
2
2C4
(4.31)
Esclera
Para modelar el comportamiento del tejido escleral se ha utilizado el modelo
hiperelástico neo-hookeano. En este caso se asume isotropı́a, por lo que no se con-
Capı́tulo 4. Modelado numérico de los tejidos del globo ocular
Córnea
Limbo
Esclera
C1 (M P a)
0,1
0,1
35
C2 (M P a)
0,0
0,0
-32
D(M P a−1 )
1 · 10−5
1 · 10−5
1 · 10−5
C3 (M P a)
0,234
0,234
0,0
C4
29,917
29,917
0,0
127
C5 (M P a)
0,234
0,0
0,0
C6
29,917
0,0
0,0
Tabla 4.1: Valores de los parámetros del modelo de comportamiento utilizado para
los tejidos de córnea, limbo y esclera [Hoeltzel et al., 1992; Buzard, 1992; Holzapfel
and Gasser, 2001].
(a)
Figura 4.10: Comportamiento de la cápsula anterior humana en el ensayo de inflado [Pedrigi et al., 2007]. Las curvas de presión vs. deformación de Green con
respecto a la configuración libre de cargas representan las direcciones meridional y
circunferencial.
sidera la contribución de direcciones preferenciales de las fibras de colágeno.
Ψ̄ =
C1 ¯
C2 ¯
(I1 − 3) +
(I2 − 3)
2
2
(4.32)
Cristalino
Desde un punto de vista mecánico, se considera a la cápsula del cristalino como un
material compuesto blando, que consiste en una red de fibras de colágeno sumergidas
en una matriz. El comportamiento mecánico de la red de fibras de colágeno está
determinado por la dirección de las fibras, el patrón geométrico de la estructura y
las deformaciones que sufre el material. Se ha comprobado en ensayos con cápsulas
bovinas que la red tridimensional de colágeno presenta orientaciones preferentes
en las direcciones en las que se aplica la tensión, debido a una reorientación de
Modelado del ojo humano y tratamientos refractivos
128
las fibras [Roveri et al., 1979]. Sin embargo, lo que es más importante, en los
estudios realizados por Pedrigi et al. [2007] se concluye que la cápsula del cristalino
exhibe variaciones regionales de las caracterı́sticas del material, consistentes en un
aumento de la rigidez del material en la dirección circunferencial comparada con
la dirección meridional. Además, esta rigidez es cada vez mayor con la distancia
al polo, al aproximarse al ecuador debido al aumento en el espesor de la cápsula,
verificada en los estudios realizados por Fisher and Pettet [1972]. Esta variación de
las propiedades del material según la dirección es la que se pretende simular mediante
el uso de un modelo de material hiperelástico cuasi-incompresible y anisótropo. Esta
caracterı́stica de los tejidos blandos ha sido observada en numerosos estudios, en
particular, Ryan y Humphrey afirman que se puede lograr alcanzar un campo de
tensiones casi homogéneo si el tejido es progresivamente más rı́gido en la dirección
circunferencial, en relación con la meridional [Humphrey, 2002], precisamente lo que
ocurre en la cápsula. Por ello, la función de energı́a de deformación utilizada para
la cápsula, considerando una familia de fibras en dirección circunferencial centrada
en los polos, es la siguiente
Ψ̄ =
C1 ¯
C3
(I1 − 3) +
{exp[C4 (I¯4 − 1)2 ] − 1}
2
2C4
(4.33)
mientras que los tejidos de núcleo y córtex se han supuesto isótropos, considerando
Ψ̄ =
4.3
C1 ¯
(I1 − 3)
2
(4.34)
Particularización del modelo 3D al elemento
membrana
A la hora de abordar el modelado mediante elementos finitos de distintas estructuras del globo ocular, nos encontramos con tejidos que presentan un espesor
despreciable frente a los tejidos circundantes. Una posible alternativa serı́a despreciar su contribución mecánica, lo cual es factible siempre que su rigidez sea inferior
a la de los otros tejidos. Esta situación se ha planteado al despreciar la contribución
de diversas membranas corneales frente al estroma en el modelado de córnea: epitelio, membrana de Bowman, membrana de Descemet y endotelio. Sin embargo, no es
posible despreciar la contribución de las estructuras que aportan rigidez, como es el
caso de la cápsula, en el cristalino. En este caso se ha optado por modelar el tejido
capsular mediante elementos membrana, por lo que las tensiones normales en la
dirección del espesor se consideran despreciables. Por lo tanto, las seis componentes
del tensor de tensiones considerado en la formulación 3D (expresiones 4.12 y 5.1)
se han de reducir en la formulación de membrana o lámina, por lo que la condición
de tensiones nulas en el espesor del elemento ha de ser incorporada si se trabaja
Capı́tulo 4. Modelado numérico de los tejidos del globo ocular
129
Figura 4.11: Se utiliza para cualquier instante un sistema local de base ortonormal
ei , donde e1 y e2 están en la superficie de la membrana y e3 es normal a la membrana.
La base del sistema se define por el convenio estándar usado en Abaqus para una
base en una superficie en el espacio.
con la ley constitutiva planteada en 3D (expresiones 4.18 y 4.24) para materiales
hiperelásticos anisótropos. Este ha sido el esquema seguido en esta tesis, para el
cual se ha empleado el algoritmo propuesto por Klinkel and Govindjee [2002]. Las
caracterı́sticas principales de este método frente a los propuestos por de Borst [1991]
y Dvorkin et al. [1995] son:
• El algoritmo de tensión plana garantiza la convergencia cuadrática ya que la
matriz de rigidez tangente que se obtiene con el método de Newton-Raphson
para cada iteración es consistente.
• El esquema propuesto es aplicable a formulaciones elementales arbitrarias (elementos barra, placa, lámina, etc.) utilizando la misma ley 3D del material.
De hecho, la reformulación de la ley de comportamiento en función del estado
tensional condicionado por el tipo de elemento ha quedado obsoleta.
• La formulación de elementos finitos sigue siendo robusta y eficiente, ya que
únicamente se ha implementado una interfase entre la formulación del elemento
y la ley constitutiva 3D.
• Este algoritmo puede utilizarse para leyes constitutivas tanto en pequeñas
como en grandes deformaciones.
A continuación se describe el algoritmo formulado para incorporar el modelo
constitutivo al elemento tipo membrana, teniendo en cuenta su implementación en
el código ABAQUS/Standard. Este código usa un sistema local de coordenadas,
definido por los vectores e1 y e2 situados en el plano y el vector e3 normal al plano.
Estos vectores de referencia giran con los movimientos de sólido rı́gido y las deformaciones son expresadas en el sistema local.
El gradiente de deformación F en notación matricial viene dado por:
Modelado del ojo humano y tratamientos refractivos
130
F11 F12 0
F = F21 F22 0
0
0 F33
(4.35)
por lo que las componentes C33 y b33 del tensor de deformaciones de Cauchy Green
por la derecha y la izquierda no son nulas, ası́ como las componentes S33 y σ33 .
Para comenzar con el algoritmo, la ley constitutiva 3D se expresa agrupando los
tensores de tensión y deformación en los términos no nulos Sm = (S11 , S22 , S12 , S13 ,
S23 )T y los que tendrı́an que ser nulos Sz = (S33 ) = 0.
µ
dSm
dSz
¶
µ
=
Cmm Cmz
Czm Czz
¶µ
dCm
dCz
¶
(4.36)
Para desarrollar el algoritmo de imposición de tensión plana de forma local,
partimos de la ecuación (4.36) y consideramos que Sz = 0 y Cz es la componente
desconocida del tensor de deformación. Expresamos la tensión en serie de Taylor
(i)
S(i+1)
= S(i)
z
z +
∂Sz
(i)
∂Cz
.
∆Cz + ... = 0
(4.37)
donde el superı́ndice i indica el número de la iteración local; en las iteraciones
sucesivas se va modificando la componente en z del tensor de deformación de Green
por la derecha, Cz hasta alcanzar la condición de Sz = 0. Despreciando los términos
(i)
(i)
de alto orden en la ecuación (4.37) obtenemos Czz = ∂Sz(i) y con ello la deformación
∂Cz
incremental
−1 (i)
∆Cz = −[C(i)
zz ] Sz
(4.38)
con lo que la deformación en la siguiente iteración viene dada por
C(i+1)
= C(i)
z
z + ∆Cz
(4.39)
La matriz de rigidez tangente, utilizada en cada iteración en el algoritmo de
Newton-Raphson, podrı́a estar asociada con la variación de Sm con respecto a Cm
pero dependerá del estado de deformación completo C. Para obtener la matriz de
rigidez tangente consistente, con la condición de tensión impuesta for la formulación
del elemento, en este caso concreto que la tensión sea nula en el espesor de la
membrana, la matriz de rigidez tangente se ha de condensar. Si dCz = 0, de la
segunda ecuación de (4.36) obtenemos
dCz = −C−1
zz Czm + dCm
(4.40)
Insertando (4.40) en la primera ecuación de (4.36) se obtiene
dSm = Cpsc dCm
con
Cpsc = [Cmm − Cmz C−1
zz Czm ]
(4.41)
Capı́tulo 4. Modelado numérico de los tejidos del globo ocular
131
Tabla 4.2: Algoritmo implementado en EF
(n)
1. Inicializar los valores en el último estado de equilibrio: b(i)
z = bz
2. Actualizar los valores de las tensiones y del tensor elástico: u(i) ⇒ C (i) , σ (i)
(i)
3. Evaluar las tensiones: kσz k < tol? En caso af irmativo, ir al paso 6.
(i)
(i)
−1
4. Actualizar las deformaciones: b(i+1)
= b(i)
z
z − [C zz ] σz
5. i=i+1, Ir al paso 2.
6. Almacenar los valores: F(i)
z = J
−1
3
q
b(i)
z
7. Calcular del tensor elástico en la configuración espacial:
C psc
= [C mm − C mz C −1
zz C zm ]
donde Cpsc es la matriz de rigidez tangente correspondiente al elemento membrana.
En la Tabla 4.2 se resume el algoritmo de adaptación propuesto por Klinkel
and Govindjee [2002] y que ha sido implementado en el código Abaqus mediante la
subrutina UMAT, para poder modelar el comportamiento anisótropo descrito en el
apartado anterior, utilizando elementos membrana.
4.4
Incorporación de la pretensión
Como se indica en el apartado 4.1, los tejidos biológicos blandos no se encuentran
libres de tensiones en su configuración de referencia, sino que están sometidos a
niveles importantes de pretensión inicial en estados de carga fisiológicos. La misión
de estas tensiones residuales depende del tipo de tejido. En el caso de la cápsula del
cristalino, sirve para mantener las curvaturas de mayor potencia óptica en el estado
acomodado, libre de tensiones según la teorı́a de von Helmholtz [1924]; en el caso
de los ligamentos, proporciona estabilidad a la articulación en ausencia de cargas
externas [Fung, 1993]; para el caso de arterias, las tensiones residuales reducen la
tensión circunferencial interna y el gradiente de tensiones en la pared arterial.
Debido a la no-linealidad de dichos tejidos y al carácter exponencial de su
curva de comportamiento, el hecho de no incluir tensiones residuales en los modelos mecánicos computacionales puede dar lugar a errores muy grandes en el cálculo
de tensiones. Otro problema adicional relacionado con las tensiones residuales es
la determinación de las propiedades del tejido. Para vasos, por ejemplo, pueden
emplearse numerosas técnicas experimentales, pero existen dos que son las más
132
Modelado del ojo humano y tratamientos refractivos
frecuentemente empleadas: ensayos uniaxiles y/o biaxiales del tejido; y ensayo de
inflado. En los primeros, las propiedades mecánicas del tejido se obtienen de una
muestra libre de tensiones y, por tanto, para el modelado numérico es necesario
conocer la configuración libre de tensiones e incorporar la pretensión inicial. Dicha
configuración se suele obtener, por ejemplo, a partir del denominado “ensayo de
apertura del ángulo” que consiste en determinar el ángulo de apertura de un anillo
tras un corte longitudinal. A partir de este dato, es posible determinar, de manera
aproximada, la pretensión inicial del anillo [Fung, 1993]. Si por el contrario, los ensayos de caracterización se realizan con el “ensayo de inflado”, en el cual se registra
la modificación del radio del vaso completo con la presión aplicada, las propiedades
mecánicas se obtienen para una muestra que no está libre de tensiones, pero cuyo
valor numérico se desconoce [Peña et al., 2006b].
En modelos numéricos, normalmente, las tensiones residuales se imponen partiendo de la configuración libre de tensiones (anillo arterial abierto o ligamentos fuera
de sus inserciones) y aplicando las condiciones de contorno necesarias se obtiene la
configuración de referencia (anillo cerrado o ligamento en su posición fisiológica). A
partir de este punto, las condiciones fisiológicas, tales como, como presión (vasos)
o flexión (ligamentos) y los análisis posteriores se realizan como un paso de carga
posterior [Gasser et al., 2002; Hirokawa and Tsuruno, 2000].
La córnea humana in vivo está sometida a tensiones en todo su espesor que
equilibran la presión intraocular, manteniendo la estabilidad morfológica adecuada.
Las medidas corneales in vivo, por tanto, están tomadas en presencia de dicha presión
intraocular, siendo desconocida la geometrı́a libre de tensiones. Es necesario, por
tanto, la incorporación de dichas tensiones presentes en el tejido para disponer de
un modelo que reproduzca las condiciones fisiológicas y, de esta forma, su respuesta
ante simulaciones de patologı́as o cirugı́as pueda ser realista [Pinsky and Datye,
1991].
4.4.1
Metodologı́a para la inclusión de tensiones residuales
Para describir la configuración actual de deformación del material, incluyendo
los efectos de la deformación debido a las tensiones iniciales, se introducen tres
configuraciones: a) el estado libre de tensiones Ωf s , b) el estado de referencia o
configuración libre de cargas Ω0 , c) el estado deformado actual Ωt . Si pensamos
en un ligamento, la configuración libre de tensiones serı́a la correspondiente al ligamento diseccionado del hueso, el estado de referencia serı́a el correspondiente al
ligamento en su inserción natural y la configuración actual vendrı́a representada por
la deformación producida por las cargas externas.
El gradiente de deformación total correspondiente a la configuración actual Fr
definido a partir de la configuración libre de tensiones que suponemos admite una
Capı́tulo 4. Modelado numérico de los tejidos del globo ocular
133
Figura 4.12: Descomposición multiplicativa debido a tensiones residuales
descomposición multiplicativa (Figura 4.12):
Fr = FF0
(4.42)
donde F0 representa el gradiente de deformación correspondiente a la deformación
inicial (transformación de Ωf s a Ω0 ) y F representa el gradiente de deformación de
la configuración inicial Ω0 a la deformada Ωt . La descomposición del gradiente de
deformación fue inicialmente planteada por Skalak [1981] para modelar en grandes
deformaciones el crecimiento en tejidos blandos y utilizada de forma continua para
tratar el crecimiento y la reabsorción de tejidos biológicos [Taber and Eggers, 1996;
Taber and Humphrey, 2001]. La aplicabilidad de esta descomposición del gradiente de deformación en el contexto computacional ha sido ampliamente comprobada
[Gardiner and Weiss, 2003; Lin and Schomburg, 2003].
La tensión inicial en la configuración de referencia σ 0 se obtiene como una función
de F0 a partir de la función densidad de energı́a de deformación Ψ partiendo de Ωf s
·
¸
∂ΨΩf s (C)
2
|C=C0 FT0
σ 0 = F0
J0
∂C
(4.43)
con C0 = FT0 F0 . Ψ se define en la configuración libre de tensiones. Esta función Ψ
se obtiene a partir de ensayos experimentales de muestras de tejido que, por tanto,
se encuentran libres de tensiones.
La tensión total en la configuración deformada σ r se puede obtener como una
función de Fr = FF0 a partir de la función densidad de energı́a de deformación de
la configuración libre de tensiones Ψ partiendo de Ωf s
·
¸
∂ΨΩf s (Cr )
2
FTr
σ r = Fr
Jr
∂Cr
(4.44)
con Cr = FTr Fr .
El segundo tensor elástico, en este caso, se obtiene partiendo de la configuración
Modelado del ojo humano y tratamientos refractivos
134
Figura 4.13: Proceso iterativo para la incorporación de las tensiones residuales en
la córnea
Ωf s de forma la estándar
4.4.2
∂ 2 ΨΩf s (Cr )
C=4
∂Cr ∂Cr
(4.45)
Reproducción de las condiciones iniciales
En el caso de la córnea humana, el estado libre de tensiones es desconocido e imposible de determinar experimentalmente. Únicamente se conoce la geometrı́a real
de la córnea in vivo, cuando la presión intraocular (PIO) actúa sobre el tejido. Con
el fin de subsanar este problema, se propone un método iterativo para la estimación
de un F0 que dé lugar a un estado tensional que equilibre la PIO [Lanchares et al.,
2008].
El método propuesto se basa en la idea de que la pretensión inicial debe equilibrar
a la PIO en la configuración de referencia, es decir, la pretensión debe ser tal que
al introducir la PIO en la configuración de referencia, los desplazamientos deben ser
nulos. En la Figura 4.13 puede verse el esquema del proceso iterativo. Inicialmente,
la configuración de referencia Ω0 se encuentra libre de tensiones, de tal forma que el
gradiente de deformación inicial toma el valor F00 = I. Si sobre esta configuración
se aplica la PIO, se obtiene una configuración deformada Ω1 sobre la que aparece
un estado tensional que equilibra a la PIO, siendo F10 el gradiente de deformación
Capı́tulo 4. Modelado numérico de los tejidos del globo ocular
135
Figura 4.14: Izquierda: Distribución de tensiones iniciales (MPa) en el modelo, que
equilibra a una PIO de 15 mmHg. Derecha: Distribución de desplazamientos, en
milı́metros.
correspondiente. En la siguiente iteración, se toma como gradiente de deformación
inicial F10 de tal forma que tras la aplicación de la PIO sobre Ω0 , se obtiene una
nueva configuración Ω2 con un gradiente de deformación F20 correspondiente a un
nuevo estado tensional. El proceso iterativo continúa hasta que los desplazamientos
obtenidos tras la aplicación de la PIO son prácticamente nulos, tomándose entonces
n−1
como gradiente de deformación inicial Fn0 = Fn−1
. La Figura 4.13 muestra, de
n F0
forma esquemática, este proceso.
La Figura 4.14 muestra las tensiones iniciales obtenidas según este proceso para
el modelo de córnea esférico propuesto (ver Capı́tulo 6). Se alcanzan valores de
1.42×10−2 MPa para unos valores de desplazamientos en la última iteración del
orden de 10−5 mm.
4.5
Modelado del comportamiento viscohiperelástico
La mayorı́a de los tejidos biológicos blandos, al igual que otros materiales empleados en ingenierı́a, son inelásticos. La dependencia con el tiempo de su comportamiento mecánico ha sido estudiada ampliamente en la bibliografı́a. Ası́, podemos
citar los trabajos de Puso and Weiss [1998] y Johnson et al. [1996] en ligamentos y
tendones; de Humphrey [1995] en vasos sanguı́neos; de Kaliske [2000] y Boyce et al.
[2007] en la córnea.
136
Modelado del ojo humano y tratamientos refractivos
(a) Kelvin-Voigt
(b) Maxwell
Figura 4.15: Modelos generalizados de Kelvin-Voigt y Maxwell, compuestos por N
conjuntos muelle-amortiguador.
La relajación y la fluencia son dos ejemplos tı́picos de procesos irreversibles gobernados por estados sin equilibrio, alcanzándose el estado de equilibrio con el tiempo.
El comportamiento viscoelástico también viene caracterizado por la histéresis, es decir, las curvas de carga y descarga del material no coinciden. La histéresis representa
la energı́a no recuperada cuando el material es cargado hasta un punto determinado
y luego descargado. Para un estudio más detallado de la viscoelasticidad, tanto en
régimen lineal como no-lineal, se puede consultar los textos de Christensen [1982] y
Simo and Hughes [1998], entre otros muchos.
El modelo de Maxwell (N conjuntos de un amortiguador colocado en serie con
un muelle) y el modelo de Kelvin-Voigt (N conjuntos de un amortiguador colocado
en paralelo con un muelle), son dos modelos mecánicos habitualmente utilizados
para explicar la viscoelasticidad lineal, en concreto, la relajación y fluencia respectivamente. Ambos se muestran en la Figura 4.15.
En esta sección, se modifica el modelo de comportamiento hiperelástico, para
tener en cuenta la viscoelasticidad.
4.6
Modelo viscohiperelástico anisótropo
En este apartado se presenta la extensión del modelo generalizado de KelvinVoigt (Figura 4.15 (a)) a problemas tridimensionales hiperelásticos anisótropos isotermos en grandes deformaciones. En lo que sigue, consideraremos que la viscoelasticidad afecta únicamente a la parte desviadora, ya que nos centraremos en materiales
cuasi-incompresibles [Peña et al., 2007a].
Al igual que planteó Simo [1987] en elastómeros, se postula la existencia de
una función de energı́a libre de Helmholtz desacoplada Ψ(C, Q) para materiales
Capı́tulo 4. Modelado numérico de los tejidos del globo ocular
(a) Relajación relajación de tensiones
137
(b) Influencia de la velocidad
Figura 4.16: Comportamiento viscoelástico del tejido corneal.
biológicos blandos con dos familias de fibras, de la forma
Ψ=
Ψ0vol (J)
0
+ Ψ̄ (C̄, m0 ⊗ m0 , n0 ⊗ n0 ) −
n
X
1
i=1
2
C̄ : Qi + Ξ(
n
X
Qi )
(4.46)
i=1
donde Ψ0vol y Ψ̄0 son la parte volumétrica y desviadora de la función energı́a elástica
inicial Ψ0 , y Qi , i = 1, ..., n, un número finito de variables internas (no observables)
definidas en la configuración de referencia y Ξ es una función dependiente de las
variables internas. Aunque [0, t] es el intervalo de tiempo de interés, por conveniencia se suele introducir el intervalo de tiempo extendido (−∞, 0] y se considera
las variables internas Qi : (−∞, 0]. Qi pueden ser interpretadas como tensiones no
equilibradas, en el sentido de no equilibrio termodinámico, y permanecen inalteradas
ante movimientos de sólido rı́gido [Simo and Hughes, 1998].
Recordando la restricción de la segunda ley de la termodinámica, en la forma
de la desigualdad de Clausius-Planck (expresión (4.9)), podemos obtener el segundo
tensor de Piola-Kirchhoff y la disipación mecánica [Marsden and Hughes, 1994]
n
2
∂Ψ(C, m0 , n0 , Qi )
∂ Ψ̄0 (C̄, m0 , n0 ) X
−
Qi ] =
= JpC−1 + J − 3 DEV [2
S =2
∂C
∂ C̄
i=1
=S0vol
+
S0iso
−J
− 32
n
X
DEV [
Qi ]
(4.47)
i=1
Dint = −
n
X
∂Ψ(C, m0 , n0 , Qi )
i=1
∂Qi
n
X
1
∂Ξ(Qi )
: Q̇i =
[ C̄ −
] : Q̇i ≥ 0
2
∂Qi
i=1
(4.48)
La condición de equilibrio termodinámico implica que para t −→ −∞ las tensiones
(4.47) están en equilibrio, lo cual significa que Qi = 0, i = 1, .., n. Consecuentemente, la disipación en el equilibrio es nula, (4.48).
138
Modelado del ojo humano y tratamientos refractivos
Teniendo en cuenta la ecuación (4.13) podemos obtener el tensor de tensiones de
Cauchy
(
)
n
∂ Ψ̄0 (C̄, m0 , n0 ) X
1
−
Qi F̄T ]
σ = p1 + dev[F̄ 2
(4.49)
J
∂ C̄
i=1
4.7
Ecuaciones de Evolución para las variables internas
Para describir un proceso viscoelástico es necesario especificar las ecuaciones de
evolución de manera que la desigualdad (4.48) sea satisfecha. Para tener en cuenta
la contribución a la viscoelasticidad de la matriz extracelular y de las fibras de
colágeno, seguimos el procedimiento propuesto por Holzapfel and Gasser [2001] y
dividimos las variables internas en
Qi =
9
X
Qij
(4.50)
j=1j6=3
donde Qi1 y Qi2 representan la contribución isótropa de la matriz, asociada a los
invariantes I¯1 y I¯2 y Qi4 , . . . , Qi9 representan la contribución anisótropa de las dos
familias de fibras, asociada a los invariantes I¯4 , . . . , I¯9
Formulamos la siguiente evolución lineal de las variables internas Qij [Simo, 1987]
Q̇ij +
γij
1
Qij =
DEV [2δ Ψ̄0(j) ]
τij
τij
lim Qij = 0
(4.51)
t→−∞
con γij ∈ [0, 1], parámetros del material, τij > 0, el tiempo de relajación asociado a
0 ∂ I¯
cada variable γij y δ Ψ̄0(j) = ∂∂Ψ̄I¯j ∂ C̄j .
La solución de la ecuación lineal (4.51) viene dada por la integral de convolución
[Peña et al., 2007a]
γij
Qij (t) =
τij
Z
t
exp[
−∞
−(t − s)
]DEV [2δ Ψ̄0(j) ]ds
τij
(4.52)
La función Ξ puede ser determinada mediante la ecuación de equilibrio termodinámico [Simo, 1987], siendo claro que, dada la ecuación de evolución (4.51), el
Capı́tulo 4. Modelado numérico de los tejidos del globo ocular
139
equilibrio se alcanza para
Q̇ij = 0
Qij = γij DEV [2δ Ψ̄0(j) ]
=⇒
n
9
X
X
∂δ Ψ̄0(j)
= 0 =⇒
∂Qij
i=1
∂Ξ
1
]=0
[− C̄ +
2
∂Qij
j=1,j6=3
(4.53)
La ecuación (4.53) define Ξ como la transformación de Legendre de la función Ψ0iso
en el sentido de que
9
n
9
X
X
X
1
0(j)
Qij ]
Ξ(Qij ) =
[
[−2γij δ Ψ̄ ] + C̄ :
2
i=1 j=1,j6=3
j=1,j6=3
(4.54)
Sustituyendo (4.52) en (4.47) e integrando por partes, el valor del segundo tensor
de Piola-Kirchhoff queda definido por la siguiente expresión:
S =JpC
−1
+J
− 32
9
X
[(1 −
j=1,j6=3
+
n
X
9
X
n
X
©
ª
γij )DEV 2δ Ψ̄0(j) (C̄, m0 , n0 ) ]+
i=1
Z
2
[J − 3 γij
t
exp[
−∞
i=1 j=1,j6=3
ª
−(t − s) d ©
]
DEV [2δ Ψ̄0(j) (C̄, m0 , n0 )] ds]
τij
ds
(4.55)
Qi alcanzará su valor de equilibrio (4.53) cuando τtij −→ ∞, por lo que la tensión
de equilibrio correspondiente será una fracción de la tensión inicial, es decir,
lim S = JpC
t
τij
−→∞
−1
+J
− 32
9
X
[(1 −
j=1,j6=3
n
X
©
ª
γij )DEV 2δ Ψ̄0(j) (C̄, m0 , n0 ) ]
(4.56)
i=1
La expresión del tensor de tensiones de Cauchy, en función de la integral de
convolución, viene dada por
9
n
X
©
ª
1 X
[(1 −
γij )dev F̄[2δ Ψ̄0(j) (C̄, m0 , n0 )]F̄T ]+
σ =p1 + [
J j=1,j6=3
i=1
Z
n
9
t
X X
©
ª
−(t − s) d
] {dev F̄[2δ Ψ̄0(j) (C̄, m0 , n0 )]F̄T }]ds]
+
[γij
exp[
τij
ds
−∞
i=1 j=1,j6=3
(4.57)
4.7.1
Algoritmo de integración temporal
En este apartado se plantea, de forma resumida, el algoritmo de actualización
de la tensión total (4.55) idóneo para su implementación en un código de elementos
Modelado del ojo humano y tratamientos refractivos
140
finitos. Dicho algoritmo numérico fue inicialmente propuesto por Herrmann and
Peterson [1968] y Taylor et al. [1970], y posteriormente modificado por Simo [1987].
La idea clave es transformar la representación de convolución, presentada en la
sección anterior, en una fórmula recursiva en dos pasos, trabajando con las variables
internas almacenadas en los puntos de la cuadratura de la malla de elementos finitos
[Simo and Hughes, 1998].
Inicialmente, definimos en el algoritmo una nueva variable interna auxiliar asociada a la historia
Z t
ª
−(t − s) d ©
(ij)
]
DEV [2δ Ψ̄0(j) (C̄, m0 , n0 )(s)] ds
H =
exp[
(4.58)
τij
ds
−∞
Consideramos [t0 , T ] ⊂ R, con t0 < T , el intervalo de tiempo de interés. Sin
S
perdida de generalidad, tomamos t0 = −∞, y n∈I [tn , tn+1 ], como una partición
(tiempo de discretización) del intervalo cerrado [t0 , T ] con I un subconjunto de
números naturales y ∆tn = tn+1 − tn el incremento de tiempo asociado. Desde
un punto de vista algorı́tmico, el problema queda definido en un formato inducido
por la deformación y consideramos que en los tiempos tn y tn+1 todas las variables
cinemáticas relevantes son conocidas.
Teniendo en cuenta la propiedad de semigrupo de la función exponencial y la
propiedad aditiva de la integral sobre el intervalo de integración y usando la regla
del punto medio para aproximar la integral (4.58) sobre [tn , tn+1 ] llegamos a la
fórmula recursiva de actualización [Simo and Hughes, 1998]
(ij)
Hn+1 = exp[
−∆tn (ij)
−∆tn 0(j)
]Hn + exp[
](S̄n+1 − S̄0(j)
n )
τij
2τij
(4.59)
0(j)
donde S̄n+1 = DEV [2δ Ψ̄0(j) (C̄, m0 , n0 )(s)] es la tensión inicial correspondiente a
0(1)
0(2)
cada Ij , es decir, S̄n+1 y S̄n+1 representan la contribución debida a la matriz ex0(4)
0(9)
tracelular y S̄n+1 . . . S̄n+1 la contribución de las dos familias de fibras (4.12).
Introduciendo el valor de la nueva variable interna (4.59) en (4.55), se obtiene la
aproximación algorı́tmica del segundo tensor de Piola-Kirchhoff
Sn+1 =Jn+1 pn+1 C−1
n+1
+
− 32
Jn+1
9
X
[(1 −
−2
9
n
X
X
j=1,j6=3 i=1
0(j)
γij )S̄n+1 ])+
i=1
j=1,j6=3
3
+ Jn+1
n
X
(ij)
[γij {DEV [Hn+1 ]}]
(4.60)
Capı́tulo 4. Modelado numérico de los tejidos del globo ocular
141
Y, por lo tanto, también el tensor de tensiones de Cauchy
σ n+1 =pn+1 1 +
+
9
X
1
Jn+1
9
X
1
Jn+1
[(1 −
n
X
i=1
j=1,j6=3
n
n
X
[γij
¾
∂ Ψ̄0(j) (C̄n+1 , m0 , n0 ) T
]F̄n+1 ]+
γij )dev F̄n+1 [2
∂ C̄
½
o
(ij)
dev[F̄n+1 [Hn+1 ]F̄Tn+1 ]
]
(4.61)
j=1,j6=3 i=1
Es necesario realizar una linealización consistente con la finalidad de preservar
la convergencia cuadrática en la resolución del problema mediante el método de
Newton [Hughes, 2000]. Para simplificar el procedimiento recursivo de actualización
conviene reescribir la expresión (4.59) siguiendo Simo and Hughes [1998]
−∆tn 0(j)
−∆tn (ij)
]Hn − exp[
]S̄n
τij
2τij
−∆tn 0(j)
]S̄n+1
= H̃(ij)
n + exp[
2τij
H̃(ij)
= exp[
n
(ij)
Hn+1
(4.62)
(4.63)
con lo cual la expresión de los tensores tensión (4.60) y (4.61) queda
Sn+1 =
− 32
Jn+1 pn+1 C−1
n+1 +Jn+1
σ n+1 = pn+1 1 +
9
X
9
X
n
X
0(j)
[(1−γj +νj )S̄n+1 +
γij {DEV
i=1
j=1,j6=3
[(1 − γj +
0(j)
νj )dev[σ n+1 ]
+
j=1,j6=3
donde γj =
Pn
i=1
γij y νj =
Pn
i=1
n
1 X
Jn+1
[H̃(ij)
n ]}] (4.64)
γij {dev[h̃(ij)
n ]}]
(4.65)
i=1
n
]. Conviene señalar que el término
γij exp[ −∆t
2τij
(ij)
H̃n es constante en el tiempo tn+1 con lo cual se simplifica el proceso de linealización
[Peña et al., 2007a].
Usando (4.18) y (4.64) se obtiene la matriz de rigidez tangente en la configuración
material
Cn+1 =C0vol n+1
+
9
X
0(j)
[(1 − γj + νj )Ciso
n+1 +
j=1,j6=3
n
2 − 34 X
(ij)
−1
−1
γij {DEV [H̃(ij)
− Jn+1
n ] ⊗ C̄n+1 + C̄n+1 ⊗ DEV [H̃n ]−
3
i=1
1 −1
−1
−(H̃n(ij) : C̄)(I−1
C n+1 − C̄n+1 ⊗ C̄n+1 )}]
3
(4.66)
Modelado del ojo humano y tratamientos refractivos
142
y aplicando (4.23), su expresión en la configuración espacial
C n+1
=C 0vol
n+1 +
9
X
0(j)
[(1 − γj + νj )C iso
n+1 +
j=1,j6=3
−
2
3Jn+1
n
X
(ij)
γij {dev[h̃(ij)
n ] ⊗ 1n+1 + 1n+1 ⊗ dev[h̃n ]−
i=1
1
−tr[h̃n(ij) ](I − 1 ⊗ 1)}]
3
(ij)
(ij)
(4.67)
donde h̃n = F̄n+1 H̃n F̄Tn+1 .
La resolución numérica del problema ası́ planteado, hace necesario el conocimiento de las variables Hn y S̄0n para el tiempo tn+1 . Si ∆tn fuese constante, no
0(j)
serı́a necesario almacenar S̄n siendo únicamente preciso calcular y almacenar H̃n ,
lo cual implica un menor coste computacional. Desafortunadamente, los tejidos
biológicos blandos sufren grandes deformaciones, siendo conveniente usar incrementos de tiempo variables.
Los parámetros viscoelásticos, τij y γij , se determinan ajustando el modelo a
los resultados experimentales. En la Tabla 4.3 se resume la implementación en un
código de elementos finitos del algoritmo numérico descrito por Peña et al. [2007a].
Capı́tulo 4. Modelado numérico de los tejidos del globo ocular
Tabla 4.3: Algoritmo implementado en EF
1. Base de datos en cada punto de integración
(j)
(ij)
{S̄n , {Hn } i = 1 . . . N y j = 1 . . . N
2. Cálculo del tensor de tensiones de Cauchy elástico inicial
n
o
0(j)
0(j)
,m0 ,n0 )
1
T
dev F̄n+1 [2 ∂ Ψ̄ (C̄∂n+1
]
F̄
devn+1 [σ n+1 ] = Jn+1
n+1
C̄
3. Actualización de las variables internas
0(j)
0(j)
S̄n+1 = F̄n+1 (Jn+1 dev[σ n+1 ])F̄Tn+1
(ij)
H̃n
(ij)
0(j)
n
n
]Hn − exp[ −∆t
]S̄n
= exp[ −∆t
τij
2τij
(ij)
0(j)
(ij)
n
]S̄n+1
Hn+1 = H̃n + exp[ −∆t
2τij
4. Cálculo del tensor de tensiones de Cauchy
(Jn+1 )
|n+1
pn+1 = dΨvoldJ
P
(j)
(ij)
h̃n = ni=1 γij dev[F̄n+1 H̃n F̄Tn+1 ]
P
(j)
(ij)
h̃n = ni=1 γij tr[F̄n+1 H̃n F̄Tn+1 ]
P
0(j)
σ n+1 = pn+1 1 + 9j=1,j6=3 [(1 − γj + νj )dev[σ n+1 ] +
(j)
1
h̃ ]
Jn+1 n
5. Cálculo del tensor elástico tangente inicial
c0vol
0(j)
n+1
y ciso
n+1
6. Introducción de los efectos viscoelásticos
P
0(j)
ciso n+1 = 9j=1,j6=3 [(1 − γj + νj )ciso n+1 −
(j)
(j)
(j)
2
[h̃n ⊗ 1n+1 + 1n+1 ⊗ h̃n − h̃n (I − 31 1 ⊗ 1)]}]
− 3Jn+1
7. Cálculo del tensor elástico tangente
cn+1 = c0vol
n+1
+ ciso
n+1
143
144
Modelado del ojo humano y tratamientos refractivos
Capı́tulo 5
Caracterización de las propiedades
de material de los tejidos
En este capı́tulo se describen los ensayos realizados en laboratorio para la caracterización de los tejidos corneal y escleral. Los tejidos biológicos blandos suelen
mostrar, en general, un comportamiento no-lineal y una componente viscoelástica.
En concreto, el comportamiento del tejido corneal está muy influenciado por las
orientaciones preferenciales de las fibras de colágeno en su seno estromal, mostrando
un comportamiento anisótropo dependiente, además, de la velocidad de deformación.
Con el fin de establecer un modelado correcto del comportamiento de los tejidos
corneal y escleral, y su caracterización, se realizan ensayos monotónicos de tracción
uniaxial, y ensayos cı́clicos de relajación, para analizar su comportamiento viscoelástico.
Debido a la dificultad de conseguir tejido humano, se ha utilizado fundamentalmente tejido de ojos de cerdos sanos procedentes del matadero local y de la Facultad
de Veterinaria de la Universidad de Zaragoza. La disponibilidad de córnea humana
se limita únicamente a córneas de donante procedentes del Banco de Tejidos de
Aragón no aptas para su implante por haber sufrido daño endotelial, siendo muy
pocas las unidades que se han podido obtener para su estudio. También se han podido realizar ensayos de esclera humana sana, siendo utilizadas muestras extraı́das
del anillo de tejido de donante resultante tras la escisión del botón corneal implantado al paciente de queratoplastia. En este capı́tulo se describen dos modelos de
ajuste de los parámetros que caracterizan el comportamiento hiperelástico y viscohiperelástico, a partir de los ensayos de tracción uniaxial y de ciclos de relajación.
En resumen, los tejidos estudiados mediante el análisis de las curvas obtenidas
en los ensayos de laboratorio, son: córnea sana, córnea con tratamiento de crosslinking para estimular la creación de enlaces entre fibras de colágeno, y esclera.
Posteriormente, se ha realizado la identificación de los parámetros que caracterizan el comportamiento no lineal con grandes deformaciones de los distintos tejidos
estudiados.
Finalmente, se indican las propiedades de material de los tejidos de cristalino
(cápsula, núcleo y córtex) obtenidas de la bibliografı́a, que son posteriormente utilizadas en la simulación numérica presentada en el Capı́tulo 7. Dichas propiedades
145
146
Modelado del ojo humano y tratamientos refractivos
han sido tomadas de la bibliografı́a debido a la imposibilidad de realización de estos
ensayos en nuestro laboratorio por falta de equipamiento adecuado.
5.1
5.1.1
Metodologı́a de la realización de ensayos
Obtención de los tejidos
El objeto del presente capı́tulo es la caracterización de los tejidos corneal y
escleral mediante ensayos en laboratorio, para el posterior modelado del ojo humano.
La evidente dificultad de conseguir estos tejidos de especie humana conducen a que el
número de casos ensayados con tejido humano (corneal y escleral) sea muy reducido.
Por este motivo surge la necesidad de utilizar tejidos de otras especies.
La mayorı́a de estudios que se encuentran en la bibliografı́a han sido realizados
utilizando ojos de cerdo, por la similitud microestructural y funcional de la córnea
de cerdo con la humana [Spoerl et al., 1998; Hayes et al., 2008; Elsheikh et al.,
2008]. Autores como Zeng et al. [2001] y Wollensak et al. [2003b] concluyeron que
el tejido corneal de ambas especies muestra respuesta a la tracción y curvas de
comportamiento tensión vs deformación similares.
Las caracterı́sticas morfológicas y microestructurales de la córnea humana se
describen en el Capı́tulo 2. A nivel microestructural, la principal diferencia entre la
córnea humana y la porcina reside en que la córnea de cerdo se compone de cuatro
capas: epitelio, estroma, membrana de Descemet y endotelio; es decir, carece de
membrana de Bowman entre epitelio y estroma [Jay et al., 2008]. Desde el punto
de vista biomecánico, esta membrana no aporta rigidez al tejido corneal, por lo que
a nivel estructural no constituye una diferencia significativa entre las córneas de
ambas especies.
Otra diferencia entre la córnea de cerdo y la humana se encuentra en la geometrı́a. A simple vista, la córnea humana presenta un contorno circular, mientras que
la de cerdo tiene apariencia ovalada con un extremo más prolato, siendo el diámetro
horizontal medio de 14,5 mm y el vertical de 12,5 mm. El espesor corneal varı́a
entre 1 mm y 1,5 mm, siendo considerablemente superior al humano (entre 550 µm
y 600 µm).
Una última diferencia que parece existir entre la córnea porcina y la humana
es la orientación preferencial de las fibras de colágeno en el estroma. Mientras que
la córnea humana muestra orientaciones preferenciales vertical (superior-inferior) y
horizontal (nasal-temporal) en el área central de la córnea y circunferencial en su
periferia [Aghamohammadzadeh et al., 2004; Boote et al., 2005; Hayes et al., 2007b;
Meek and Boote, 2009] (ver Capı́tulo 2), la córnea de cerdo parece presentar diferentes orientaciones [Hayes et al., 2007a], según se puede observar en la Figura 5.1
obtenida a partir de los patrones de difracción de rayos X de una córnea sana de
cerdo. La correlación entre la microestructura y el comportamiento biomecánico de
Capı́tulo 5. Caracterización de las propiedades de material de los tejidos
147
Figura 5.1: Diagrama vectorial representativo de la orientación preferencial de las fibras de colágeno en la córnea de cerdo, determinada mediante patrones de difracción
de rayos X [Hayes et al., 2007a]. Los vectores, cuya longitud indica la cantidad de
colágeno orientada según la dirección indicada en ese punto, se escalan según el factor mostrado por la barra de color. La lı́nea azul discontinua representa la posición
del limbo.
los tejidos sugiere que la córnea de cerdo y la humana deberı́an mostrar diferente comportamiento, dando lugar a una aparente incongruencia [Meek and Boote,
2009], puesto que los ensayos realizados muestran una evidente similitud, como se
ha comentado anteriormente.
Ensayos realizados en córneas humanas, en las direcciones vertical (superiorinferior), horizontal (nasal-temporal) y a 45o muestran mayor rigidez en las direcciones vertical y horizontal que en direcciones oblı́cuas [Elsheikh et al., 2008], lo que
demuestra una anisotropı́a basada en estas dos direcciones ortonormales. Ensayos
realizados con tejido corneal porcino muestran una rigidez similar en las direcciones
horizontal y vertical, siendo ligeramente superior a las obtenidas para orientaciones
diagonales [Elsheikh and Alhasso, 2009].
En resumen, a pesar de la aparente diferencia de disposición preferencial de
las fibras de colágeno en el estroma corneal entre las especies humana y porcina, el
comportamiento biomecánico en las direcciones más rı́gidas en ambos casos, es decir,
horizontal y vertical, parecen ser similares. Por ello, la mayorı́a de autores utilizan
ojos de cerdo para estudiar el comportamiento del tejido corneal considerándolo
análogo al de la córnea humana.
Los ensayos que se presentan en este capı́tulo se realizan con tejidos de diversa
procedencia. Por una parte, se han obtenido ojos de cerdo procedentes del matadero
municipal, que corresponden a individuos de edad aproximada de 6 meses y peso
alrededor de 150 Kg. También se ha dispuesto de ojos de cerdo procedentes de la
Facultad de Veterinaria de la Universidad de Zaragoza, cuya edad rondaba los 3
148
Modelado del ojo humano y tratamientos refractivos
meses y pesaban alrededor de 30 Kg.
Se han realizado ensayos con tejido de córneas humanas que presentaban daño
endotelial. Por último, han sido ensayadas muestras de tejido escleral humano sano,
procedente del tejido donante circundante al botón corneal implantado en cirugı́as
de queratoplastia.
5.1.2
Traslado y mantenimiento
Los ojos de cerdo procedentes de matadero fueron ensayados entre 1 y 3 horas
post-portem. Los ojos de cerdo procedentes de la Facultad de Veterinaria fueron ensayados en menos de 15 horas post-mortem. En todos los casos, se conservó el globo
ocular completo, sumergido en suero fisiológico y mantenido a una temperatura de
4o C.
Las muestras humanas, tanto las patológicas procedentes de quirófano (recogidas
en el instante de su disección) como los tejidos de donante, se trasladaron y mantuvieron en medio de conservación (Optisol, Chiron Ophthalmics, Irvine, California),
a 4o C de temperatura.
Todas las córneas incluidas en este estudio presentaban el epitelio intacto y no
tenı́an indicios de edema.
5.1.3
Extracción de la probeta
Antes de proceder a la extracción de la probeta se asegura la disposición de los
materiales necesarios, que son los siguientes:
• Methocel 2% (OmniVision GmbH, Punchheim, Alemania). Esta sustancia,
hidroxipropil-metilcelulosa de alta viscosidad, es utilizada en la consulta oftalmológica para la protección corneal durante el examen con lentes de exploración. Su aplicación en la preparación de los tejidos para la realización de
ensayos se ha mostrado adecuada, por su capacidad de regular la cantidad de
agua en el tejido corneal. El endotelio corneal es la membrana responsable de
la absorción de nutrientes procedentes del humor acuoso y su bombeo al interior del tejido corneal, no vascularizado. De esta forma, si se altera el endotelio
o su entorno, mediante la exposición del endotelio al ambiente, se produce una
alteración de la hidratación corneal, pudiendo sufrir swelling o edema [Bryant
and McDonnell, 1998; Borja et al., 2004] si el medio es húmedo, o disminución
de su contenido en agua, si el medio es seco.
• Troquel de corte. La imagen 5.2 muestra las piezas que componen el troquel
con el que se corta la forma definitiva del tejido para su posterior ensayo. Las
dos partes laterales son simétricas, y la central representa el cuello, cuya forma
y dimensiones se troquelan en el tejido. Entre las tres piezas se amarran dos
Capı́tulo 5. Caracterización de las propiedades de material de los tejidos
149
Figura 5.2: Las figuras muestran las partes que componen el troquel de corte de
la probeta. Las dos partes laterales son simétricas, y la central representa el cuello
troquelado en el tejido. Entre las tres piezas se amarran dos cuchillas, que por su
flexibilidad se adaptan a la curvatura del troquel.
cuchillas, que por su flexibilidad son capaces de adaptarse a la curvatura del
troquel. La pieza central tiene una anchura mı́nima de 2 mm y una longitud
de 10 mm que permite el corte en forma de “hueso” de la probeta de tejido. La
utilización del troquel de corte permite lograr que todas las probetas utilizadas
presenten uniformidad dimensional.
• Instrumental. Se utiliza instrumental quirúrgico convencional, como bisturı́es,
tijeras, pinzas, etc.
• Papel de lija. Para un correcto amarre de la probeta entre las mordazas de
la máquina de ensayos, y para evitar deslizamientos que alteren el resultado,
se fijan pequeñas porciones de papel de lija, con la parte rugosa enfrentada al
tejido, a ambos extremos de la probeta. A estos fragmentos de papel de lija
se les denomina tabs.
• Adhesivo de cianoacrilato. Este adhesivo se utiliza para la fijación de los tabs
en los extremos de la probeta. El tejido debe estar limpio y seco para asegurar
la correcta fijación. Se eliminan los restos de grasa con algodón humedecido en
alcohol, y la humedad mediante papel de celulosa. El adhesivo de cianoacrilato
se adhiere con rapidez, sin más que posicionar correctamente el tab contra el
tejido, ejerciendo una ligera presión.
El procedimiento de obtención de la probeta de tejido corneal se realiza según
se muestra en la Figura 5.3. Se comienza por retirar los músculos oculares y restos
de tejido graso y conjuntiva de todo el globo ocular. A continuación, se corta el
nervio óptico a nivel de la superficie del globo. Debe determinarse el eje de interés
para el ensayo, el horizontal (nasal-temporal) en caso de ojo de cerdo, mediante la
identificación de vasos cuya posición sea reconocible, o bien, en ausencia de capilares visibles, marcar dicho eje con un rotulador quirúrgico con el fin de extraer la
probeta alineada según una de las direcciones preferentes de las fibras de colágeno.
150
Modelado del ojo humano y tratamientos refractivos
Figura 5.3: Extracción de una probeta de tejido corneal de un ojo de cerdo. Tras
seccionar el nervio óptico, se practican dos cortes en forma de cruz (a). Se extrae el
cuerpo vı́treo y se extiende la esclera (b) para determinar la orientación preferente
(nasal-temporal) y extraer la probeta en esa dirección.
A continuación se practica una pequeña incisión con la punta del bisturı́ en el punto
de inserción del nervio óptico, con el objetivo de despresurizar el globo y facilitar su
disección. A partir de esa incisión, realizar un corte en forma de cruz según indica
la Figura 5.3 (a).
A través de esta apertura en cruz se extrae el interior del globo: cuerpo vı́treo,
procesos ciliares, cristalino, coroides e iris. Desde el momento en que la parte posterior de la córnea (endotelio) queda expuesta, se aplica metilcelulosa de alta viscosidad (Methocel 2%, OmniVision GmbH, Punchheim, Alemania). De esta forma
se regula la cantidad de agua en el tejido corneal, evitando que el tejido evacúe su
contenido en agua, secándose, ası́ como que se produzca swelling, que consiste en la
absorción de agua del medio, provocando un aumento de volumen del tejido corneal.
Los extremos que no pertenecen a la banda de interés (dirección del eje seleccionado) se eliminan según los cortes indicados por la Figura 5.3 (b), es decir, los
extremos superior e inferior; de esta forma, se obtiene una banda lo más plana posible. A continuación, se posiciona correctamente la muestra de tejido en el troquel y
se procede a practicar el corte que configurará la probeta.
La longitud del tejido corneal a ensayar viene determinada por el diámetro horizontal de la córnea (como se ha explicado anteriormente, en la córnea de cerdo el
diámetro horizontal es mayor que el vertical). El ancho de la probeta a priori es
de 2 mm, que es la distancia mı́nima entre las dos cuchillas portadas por el troquel.
Sin embargo, puesto que el tejido tiene un elevado contenido en agua y a pesar de
la presencia de Methocel, se produce en cierta medida el fenómeno de swelling, que
altera las medidas de anchura y espesor de la probeta de tejido corneal.
En los dos extremos de la probeta, en las caras anterior y posterior, se fijan tabs
de papel de lija. Los tabs tienen geometrı́a rectangular, dimensiones aproximadas
de 10×6 mm y se colocan de forma que la parte granulada quede en contacto con el
tejido escleral, haciendo coincidir el extremo del tab con el lı́mite corneal. Se aplica
Capı́tulo 5. Caracterización de las propiedades de material de los tejidos
151
Figura 5.4: Probeta de tejido corneal de cerdo. Los tabs se posicionan sobre la
esclera a partir del limbo, asegurando que el tejido ensayado es únicamente córnea.
una ligera presión durante 10 segundos para asegurar su correcta fijación. Se utiliza
un total de cuatro tabs en cada probeta. Se evita el contacto del adhesivo con el
tejido corneal, pues éste se degrada en presencia de cianoacrilato, y la probeta debe
ser desechada. La Figura 5.4 muestra una probeta de tejido corneal preparada para
la realización del ensayo, una vez fijados los tabs.
Para establecer las dimensiones correctas de la probeta deben tomarse medidas
de longitud, anchura y espesor. La longitud de la probeta es la distancia entre ambos
extremos de la córnea, es decir, idealmente coincide con el diámetro corneal, y a su
vez, con la distancia entre tabs; pero su valor real se determina finalmente como la
distancia entre mordazas. La anchura es la medida del cuello mı́nimo de la muestra,
idealmente a la altura de su plano medio. El espesor se determina mediante un
micrómetro digital (Mitutoyo Absolute Digimatic, Mitutoyo Corporation, U.S.A.).
Cada una de ellas se toma tres veces, y se toma el valor promedio de las tres medidas.
La obtención de la probeta de tejido escleral es más sencilla que la de córnea. El
tejido escleral presenta una estructura compleja en la que no existe uniformidad de
las orientaciones preferentes de las fibras de colágeno [Komai and Ushiki, 1991b; Girard et al., 2008]. Por este motivo, las probetas se han extraı́do en dos orientaciones
distintas, según muestra la Figura 5.5, son las siguientes:
• Transversal antero-posterior, a partir de 2 mm del limbo (lı́nea roja de puntos
en la Figura 5.5, izquierda), en la que el tejido presenta menor espesor en la
sección media que en los extremos
• Coronal en las regiones superior e inferior, a 10 mm del limbo (lı́nea azul de
puntos en la Figura 5.5, izquierda), presentando espesor casi uniforme en su
sección media.
152
Modelado del ojo humano y tratamientos refractivos
Figura 5.5: Posición de la extracción de probetas de tejido escleral de un ojo de cerdo.
Las orientaciones de disección son: transversal anteroposterior (lı́nea roja de puntos)
y coronal en las regiones superior e inferior (lı́nea azul de puntos) aproximadamente
a 10 mm del limbo, cuyo espesor es prácticamente constante, según se puede observar
en el gráfico [Kretschmann et al., 2003].
Tras la extracción de las bandas de tejido escleral en ambas orientaciones, se
utiliza el troquel de corte para configurar la probeta según las dimensiones y forma
establecidas. La colocación de tabs en los extremos de la probeta de tejido escleral se
ha realizado de forma que la longitud de tejido a ensayar, y por lo tanto, la distancia
entre los extremos más próximos de tabs opuestos, sea de aproximadamente 15 mm.
Posteriormente a la realización de los ensayos, no se observa dependencia de los
resultados obtenidos con la orientación de extracción, por lo que este tejido se asume
como isótropo en el modelado de su comportamiento.
5.1.4
Realización del ensayo de tracción uniaxial
Las probetas de tejido se ensayan de inmediato tras su disección. Se realizan
los ensayos de tracción uniaxial bajo control de desplazamiento en un equipo INSTRON 5548, utilizando una célula de carga de fondo de escala 10 N. Para evitar
que el tejido pierda su hidratación durante el ensayo, se utiliza un humidificador
ultrasónico, que proporciona vapor al recinto de ensayo, manteniendo la humedad y
la temperatura constante a 25o C. Al estar el tejido protegido por Methocel, el efecto
de swelling que se produce es desprecible.
La preparación de la máquina se realiza antes de comenzar los ensayos. Los
parámetros de ensayo se introducen en el software que gestiona la máquina, indicando las dimensiones de la muestra y las condiciones del ensayo: número de ciclos
de preacondicionamiento y carga máxima en dichos ciclos, velocidad de máquina en
el ensayo y condiciones de finalización (rotura de la muestra).
Los ciclos de preacondicionamiento se realizan con el objetivo de alinear las
Capı́tulo 5. Caracterización de las propiedades de material de los tejidos
153
Figura 5.6: Realización del ensayo de tracción en la máquina INSTRON 5548 con
tejido humano patológico del botón corneal extraı́do en una queratoplastia. La
imagen ampliada (derecha) muestra el amarre de la probeta, para el que se utilizan
pinzas acopladas a las mordazas, debido al pequeño tamaño de la muestra.
fibras de colágeno en la dirección de la carga, obteniendo un estado de referencia
para la posterior realización del ensayo que, a pesar de no reproducir las condiciones
fisiológicas en el tejido, sı́ reconfigura en parte su microestructura [Boyce et al.,
2007]. La realización de ciclos de preacondicionamiento es frecuente en ensayos
realizados con tejidos biológicos blandos [Carew et al., 2004; Doehring et al., 2004;
Boyce et al., 2007].
Los ensayos de tracción uniaxial se realizan a una velocidad de deformación
constante de 0,2%·seg−1 . La velocidad introducida en la máquina para el desplaza0,2
· L·60 mm·min−1 , siendo L la distancia
miento de la mordaza se calcula como 100
entre las mordazas tras ser amarrada la probeta en las mismas. En el caso de probetas de tejido corneal, la longitud viene determinada por el diámetro de la córnea
en la dirección de la probeta.
Las muestras se someten a tres ciclos de carga/descarga hasta 0,3 N antes de
ser ensayados a rotura, con el fin de lograr un acondicionamiento de las fibras en
la dirección de la carga, es decir, en la orientación longitudinal de la probeta. Los
, donde L0 es la distancia inicial
datos de alargamiento se obtienen como λ= L0L+∆L
0
entre mordazas y ∆L es el desplazamiento de la mordaza superior. La tensión de
Cauchy se obtiene como σ = NAλ , donde N es la carga aplicada y A el área final de la
sección transversal de la probeta, que en materiales incompresibles es A = Aλ0 . Los
datos de carga y desplazamiento se registran hasta el final del ensayo, en el punto
de rotura de la probeta.
Se debe indicar que en el caso de algunas muestras de córnea humana patológica,
procedente de paciente de queratoplastia, el botón corneal extraı́do es de tamaño
muy reducido (diámetro de 7-8 mm), lo que dificulta la fijación de tabs. Se realizan
Modelado del ojo humano y tratamientos refractivos
154
12
10
C1
C2
C3
C4
C5
C6
C7
C8
C9
10
8
σ (Mpa)
σ (Mpa)
15
6
4
5
C1
C2
C3
C4
C5
C6
C7
C8
C9
C−Mean
2
0
1
1.1
1.2
λ
1.3
1.4
0
1
(a) Datos iniciales
1.05
1.1
λ
1.15
1.2
1.25
(b) Datos truncados
Figura 5.7: (a) Curvas tensión de Cauchy vs alargamiento de tejido corneal de cerdo
obtenidas experimentalmente mediante ensayo de tracción uniaxial. (b) Curvas
experimentales truncadas a σ = 10 MPa. La curva media se muestra en azul oscuro.
los ensayos utilizando unas pinzas para la sujección del tejido a las mordazas de la
máquina (Figura 5.6).
5.2
Resultados de los ensayos
Se han realizado ensayos de tracción uniaxial con tejido corneal y escleral, de
cerdo y de humano. A continuación se describen los resultados obtenidos de dichos
ensayos en forma de curvas tensión de Cauchy vs alargamiento.
5.2.1
Tejido corneal
En el estudio de tejido corneal sano sin tratamiento se han utilizado nueve muestras extraı́das de córneas de ojos de cerdos procedentes de la Facultad de Veterinaria
de la Universidad de Zaragoza. Los individuos tenı́an una edad aproximada de 3
meses y su peso era de 30 Kg, aproximadamente. Las muestras han sido etiquetadas
como TCC (Tejido Corneal de Cerdo) y numeradas de TCC1 a TCC9. La Figura
5.7 (a) muestra las curvas obtenidas mediante el ensayo de tracción. Puesto que
no todas las muestras rompen en un mismo punto, se ha considerado los puntos
de rotura de todas las probetas y que se presentan en la Tabla 5.1, para determinar el valor de tensión de rotura. Posteriormente las curvas se han truncado a un
mismo valor de tensión (10 MPa) para obtener la curva media. Los valores medios
en el punto de rotura son: alargamiento λR = 1, 215 ± 0, 052 y tensión de Cauchy
σR = 10, 984 ± 3, 552 MPa. Para realizar el ajuste de la zona que presenta comportamiento elástico, las curvas han sido truncadas en σ = 10 MPa, según se observa
en la Figura 5.7 (b).
Capı́tulo 5. Caracterización de las propiedades de material de los tejidos
Muestra
TCC1
TCC2
TCC3
TCC4
TCC5
TCC6
TCC7
TCC8
TCC9
Media
SD
λR
1,2902760
1,1414268
1,1655325
1,1747052
1,1785045
1,2212087
1,2451626
1,2390436
1,2770831
1,2147714
0,0522762
155
σR (MPa)
13,0423435
5,7723782
6,1728864
11,401972
11,3562726
10,1992954
9,9750371
16,920743
14,0162098
10,9841264
3,5519512
Tabla 5.1: Tensión de Cauchy y deformación en el punto de rotura.
12
5
σ (MPa)
10
8
6
4
2
0
1
1.1
1.2
λ
1.3
(a) Datos iniciales
1.4
1.5
4
σ (MPa)
E1
E2
E3
E4
E5
E6
E7
E8
E9
E10
E11
3
2
1
0
1
E2
E4
E5
E6
E7
E8
E9
E10
E11
1.05
λ
1.1
1.15
(b) Datos truncados
Figura 5.8: (a) Curvas experimentales tensión de Cauchy vs alargamiento de especı́menes de esclera de cerdo. (b) Curvas truncadas a λ = 1, 14. Las muestras
TEC01 y TEC03 han sido eliminadas.
5.2.2
Tejido escleral
En el estudio de tejido escleral se han utilizado once muestras extraı́das de ojos
de cerdos procedentes del matadero local. Los individuos tenı́an una edad aproximada de 6 meses y su peso era de 150 Kg, aproximadamente. Las muestras han sido
etiquetadas como TEC (Tejido Escleral de Cerdo) y numeradas de TEC01 a TEC11.
Asimismo, se ha realizado el ensayo de tejido escleral humano procedente del anillo
que rodea a la córnea de donante, que es desechado tras disecar el botón corneal
utilizado en cirugı́as de queratoplastia. Se dispuso de tres muestras, codificadas
como TEH (Tejido Escleral Humano) y etiquetadas como TEH1, TEH2 y TEH3.
La Figura 5.8 (a) muestra las curvas obtenidas mediante el ensayo de tracción
realizado con tejido escleral de cerdo. Puesto que no todas las muestras rompen en
un mismo punto, se ha considerado los puntos de rotura de todas las probetas, presentados en la Tabla 5.2. Los valores medios en el punto de rotura son: alargamiento
λR = 1, 187 ± 0, 037 y tensión de Cauchy σR = 5, 403 ± 2, 119 MPa. Como se puede
observar en la Figura 5.8 (a), las probetas TEC01 y TEC03 muestran un compor-
Modelado del ojo humano y tratamientos refractivos
156
Muestra
TEC01
TEC02
TEC03
TEC04
TEC05
TEC06
TEC07
TEC08
TEC09
TEC10
TEC11
Media
SD
λR
1,175786
1,132803
1,114826
1,259176
1,219029
1,194941
1,181305
1,171532
1,199097
1,175786
1,154774
1,187605
0,036767
σR (MPa)
4,888654
3,062373
4,542097
8,655878
6,841481
3,372606
3,11753
6,465002
7,852219
4,888654
4,370186
5,402881
2,119334
Muestra
TEH1
TEH2
TEH3
λR
1,163060
1,203705
1,213076
σR (MPa)
9,087605
18,706962
6,075560
Media
SD
1,193280
0,026588
11,754122
6,075560
Tabla 5.2: Tensión de Cauchy y deformación en el punto de rotura de algunos
especı́menes de tejido escleral. La tensión media y la desviación tı́pica no consideran
las muestras descartadas, TEC01 y TEC03.
25
25
EH1
EH2
EH3
15
10
5
0
1
EH1
EH2
EH3
20
σ (MPa)
σ (MPa)
20
15
10
5
1.1
1.2
λ
1.3
(a) Datos iniciales
1.4
1.5
0
1
1.05
1.1
λ
1.15
1.2
(b) Datos truncados
Figura 5.9: (a) Curvas experimentales tensión de Cauchy vs alargamiento de especı́menes de esclera humana. (b) Curvas truncadas a λ = 1, 2.
tamiento extraño respecto a las demás curvas, por lo que se han excluido del estudio.
Se ha tomado un valor de corte λ = 1, 14 obteniéndose las curvas truncadas que se
muestran en la Figura 5.8 (b).
Las curvas correspondientes a la realización del ensayo con tejido escleral humano se muestran en la Figura 5.9 (a). Los puntos de rotura de estos especı́menes
se incluyen también en la Tabla 5.2, siendo los valores medios de alargamiento
λR = 1, 193 ± 0, 026 y tensión de Cauchy σR = 11, 754 ± 6, 075 MPa. Se ha tomado
un valor de corte de λ = 1, 2 obteniéndose las curvas truncadas mostradas en la
Figura 5.9 (b).
Capı́tulo 5. Caracterización de las propiedades de material de los tejidos
(a)
157
(b)
Figura 5.10: (a) Para facilitar el manejo del ojo de cerdo durante el tratamiento
de cross-linking, los músculos se fijan mediante agujas a una careta rı́gida. (b) La
córnea se impregna con riboflavina (Vitamina B2), sustancia que se caracteriza por
su pigmento amarillo y que actúa como fotosensibilizador.
5.2.3
Tejido corneal con tratamiento de cross-linking
El tratamiento de cross-linking (CXL) de colágeno corneal se ha llevado a cabo
según el protocolo convencional, expuesto en el Capı́tulo 3. En este estudio se pretende no sólo determinar el cambio de propiedades que provoca en el tejido corneal
sano el aumento de los enlaces entre fibras de colágeno mediante este tratamiento
según los parámetros estándar de aplicación, sino también el efecto de duplicar el
tiempo de irradiación. Por este motivo, se ha llevado a cabo el tratamiento de
córneas para dos tiempos de irradiación ultravioleta A (UVA): 30 minutos, que es
el tiempo de exposición según el protocolo estándar, y 60 minutos.
Realización del tratamiento de cross-linking
Los ojos, cuya obtención y mantenimiento se realiza según se indica en el apartado
5.1, fueron tratados mediante CXL corneal previamente a la realización del ensayo de
tracción uniaxial. Para facilitar el manejo del globo ocular durante todo el proceso,
los músculos oculares se fijan a una máscara de “porexpán” (poliestireno expandido),
según muestra la Figura 5.10, (izquierda). Todas las córneas son desepitelizadas por
medios mecánicos y en las mismas condiciones. Las córneas se impregnan con riboflavina (Vitamina B2) al 0,1% (RICROLIN, Sooft Italia), mediante la instilación
de una gota cada 5 minutos durante un tiempo total de 30 minutos (Figura 5.10,
derecha). Una vez observada la presencia de tinción amarillenta en la cámara anterior, lo que indica la penetración de riboflavina en todo el espesor corneal, se procede
a la radiación UVA (λ=370 nm, 3 mW·cm2 ) con el equipo CBM-X-LINKER (CSO,
Italia) que se muestra en la Figura 5.11. Tras el periodo de irradiación, 30 ó 60 minutos, se procede a la realización del ensayo mecánico de tracción, según se expone
Modelado del ojo humano y tratamientos refractivos
158
Figura 5.11: El equipo de radiación ultravioleta-A (UVA) permite visualizar la
córnea durante su tratamiento (izquierda). El tratamiento debe llevarse a cabo en
ausencia de luz directa debido a la fotosensibilidad de la riboflavina, la cual muestra
fluorescencia ante la radiación UVA (derecha).
Grupo
A
B
C
Muestras
TCT03, TCT04, TCT07, TCT14, TCT15
TCT01, TCT02, TCT06, TCT10, TCT13
TCT05, TCT08, TCT09, TCT11, TCT12
Tiempo de Tratamiento
30 min
60 min
Tabla 5.3: Grupos de estudio de tejido corneal de cerdo para el estudio del efecto
de tratamiento con cross-linking de colágeno.
en el apartado 4.2.
Resultados de los ensayos con tejido corneal tratado
En este estudio se han utilizado 15 muestras extraı́das de córneas de ojos de
cerdos procedentes del matadero local. Los individuos tenı́an una edad aproximada
de 6 meses y su peso era de 150 Kg, aproximadamente. Las muestras han sido
etiquetadas como TCT (Tejido Corneal con Tratamiento) y numeradas de TCT01
a TCT15. Se han establecido tres grupos distintos para su comparación, según se
muestra en la Tabla 5.3: grupo A, grupo control, en el que no se ha realizado ningún
tratamiento; grupo B, en el que las muestras han sido tratadas según el tiempo de
irradiación determinado por el protocolo estándar, es decir, 30 minutos; grupo C,
en el que la irradiación a la que se sometieron las muestras fue más prolongada, de
60 minutos.
Se dispuso, a su vez, de dos muestras de córnea humana procedentes del Banco
de Tejidos de Aragón. Dichas córneas fueron descartadas para su implante en pacientes por haberse producido muerte de células endoteliales. Esta muerte celular
no afecta al tejido corneal a nivel estructural, por lo que es válido para su ensayo
en laboratorio. Las muestras se etiquetan como CHT1 y CHT2, siendo aplicado el
tratamiento estándar de cross-linking a la primera de ellas, y dejando la segunda
como muestra control. La edad de los donantes de CHT1 y CHT2 era 76 y 79 años,
respectivamente.
Capı́tulo 5. Caracterización de las propiedades de material de los tejidos
σ (MPa)
10
5
0
1
1.1
1.2
λ
1.3
1.4
C5
C8
C9
C11
C12
C1
C2
C6
C10
C13
C3
C7
C14
C4
C15
1.5
7
C5
C8
C9
C11
C12
C1
C2
C6
C10
C13
C3
C7
C14
C4
C15
6
5
σ (MPa)
15
159
4
3
2
1
0
1
1.05
1.1
λ
1.15
1.2
Figura 5.12: (a) Curvas experimentales tensión de Cauchy vs alargamiento de especı́menes de córnea de cerdo para el estudio del tratamiento de cross-linking. (b)
Curvas truncadas a λ = 1, 18. Las muestras pertenecientes al grupo A (Control)
se representan en azul; del grupo B (tratamiento 30 min.), en verde; del grupo C
(tratamiento 60 min.), en rojo.
Muestra
TCT01
TCT02
TCT03
TCT04
TCT05
TCT06
TCT07
TCT08
TCT09
λR
1,553680
1,186766
1,139580
1,230192
1,228547
1,240038
1,240584
1,228652
1,239941
σR (MPa)
6,284221
6,941113
1,424184
5,427947
3,831295
11,273923
3,824304
5,796096
4,826154
Muestra
TCT10
TCT11
TCT12
TCT13
TCT14
TCT15
Muestra
CHT1
CHT2
λR
1,228361
2,116497
1,205182
1,287078
1,264128
1,172870
λR
1,178987
1,217196
σR (MPa)
6,425816
4,450005
2,926687
6,095509
7,767163
2,807921
σR (MPa)
4,887140
7,422814
Tabla 5.4: Tensión de Cauchy y deformación en el punto de rotura en las muestras
de tejido corneal de cerdo para el estudio del tratamiento (TCTi) y córneas humanas
(CHT1 y CHT2).
La Figura 5.12 (a) muestra las curvas obtenidas mediante el ensayo de tracción
con el tejido corneal de cerdo. Puesto que no todas las muestras rompen en un mismo
punto, se ha considerado los puntos de rotura de todas las probetas presentados
en la Tabla 5.4. Los valores medios de alargamiento (λR ) y tensión (σR ) son de
1, 2448 ± 0, 092 y 5, 3401 ± 2.386 MPa, respectivamente. Se ha tomado el valor de
corte λ = 1, 18 obteniéndose las curvas truncadas que se muestran en la Figura 5.12
(b).
Las curvas obtenidas mediante el ensayo de las córneas humanas se muestran
en la Figura 5.13 (a). La curva correspondiente a la muestra previamente tratada,
CHT1, se representa en color verde, mientras que la muestra CHT2 se representa
mediante una curva azul. Los valores de rotura de alargamiento y tensión se han
incluido en la Tabla 5.4. Para facilitar la comparación de estas curvas con las
obtenidas para el tejido corneal de cerdo, se han truncado ambas a un mismo valor
de λR = 1, 18 (Figura 5.13 (b)). Puede observarse un comportamiento similar al
obtenido para la especie porcina, siendo el efecto del tratamiento con irradiación
UVA de 30 minutos una considerable rigidización del tejido.
Modelado del ojo humano y tratamientos refractivos
160
15
7
CH1
CH2
6
5
10
σ (MPa)
σ (MPa)
CH1
CH2
5
4
3
2
1
0
1
1.1
1.2
λ
1.3
1.4
0
1
1.05
1.1
λ
1.15
1.2
Figura 5.13: (a) Curvas experimentales tensión de Cauchy vs alargamiento de especı́menes de córnea humana para el estudio del tratamiento de cross-linking. (b)
Curvas truncadas a λ = 1, 18. La muestra CHT1 (con tratamiento) se muestra
en color verde; la muestra CHT2 (sin tratamiento), en azul. Se observa un efecto
análogo al obtenido en el tejido corneal porcino.
5.3
Comportamiento del tejido
Los resultados experimentales anteriormente descritos evidencian un comportamiento no-lineal del tejido corneal [Woo et al., 1972; Boyce et al., 2007; Nguyen
et al., 2008]. Este hecho, junto con el análisis de los estudios histológicos, sugieren que debe proponerse un modelo hiperelástico transversalmente isótropo. En
primer lugar, los especı́menes experimentan grandes deformaciones ante pequeños
valores de carga. En segundo lugar, se observa una alta no-linealidad del tejido. Por
lo tanto, debe establecerse un modelo mecánico adecuado para modelar de forma
apropiada este comportamiento mecánico. Además, el tejido se asume incompresible, es decir, I3 = J 2 = 1, [Ogden, 2001]. Dicho modelo ha sido utilizado para
tejidos biológicos blandos anisótropos por Weiss et al. [1996]; Holzapfel and Gasser
[2000]; Peña et al. [2007b], entre otros, y para tejido corneal en concreto, por Pinsky
and Datye [1991]; Hoeltzel et al. [1992]; Bryant and McDonnell [1996]; Pandolfi and
Manganiello [2006], etc.
5.3.1
Respuesta hiperelástica anisótropa de los tejidos blandos
En el Capı́tulo 4 se expone detalladamente el modelo de comportamiento hiperelástico anisótropo cuasi-incompresible utilizado para modelar el tejido corneal, por
lo que en este apartado únicamente se hará referencia a la expresión de la tensión
de Cauchy necesaria para ajustar los datos experimentales.
El tensor de tensiones de Cauchy se determina mediante la expresión:
Capı́tulo 5. Caracterización de las propiedades de material de los tejidos
∂ Ψ̄
∂ Ψ̄
2 ∂ Ψ̄ ¯ ∂ Ψ̄
[( ¯ + I1 ¯ )b̄ − ¯ b̄2 + I¯4 ¯ m ⊗ m
J ∂ I1
∂ I2
∂ I2
∂ I4
∂ Ψ̄
1 ∂ Ψ̄
∂ Ψ̄
− ( ¯ I¯1 + 2 ¯ I¯2 + ¯ I¯4 ]
3 ∂ I1
∂ I2
∂ I4
161
σ =p1 +
(5.1)
(J)
la presión hidrostática; 1 el tensor identidad de segundo orden y
con p = dΨvol
dJ
T
b̄ = F̄F̄ el tensor modificado de Cauchy-Green por la izquierda. I¯1 y I¯2 son el
primer y segundo invariante del tensor simétrico modificado de Cauchy-Green C̄
(obsérvese que I3 = J y I¯3 = 1). Finalmente, el pseudo-invariante I¯4 caracteriza la
respuesta constitutiva de las fibras [Spencer, 1954]:
I¯4 = C : M = λ2m
(5.2)
donde M es el tensor estructural asociado a la dirección de las fibras, M = m0 ⊗
m0 , siendo m0 el vector unitario en la dirección de las fibras de colágeno en la
configuración deformada.
Para poder estimar el tensor de tensiones de Cauchy es necesario definir una
función densidad de energı́a de deformación Ψ adecuada, adaptada a las caracterı́sticas del tejido corneal que muestran los datos experimentales. Diversos modelos pueden ser propuestos para reproducir el comportamiento del tejido observado
experimentalmente. En este apartado, propondremos dos funciones distintas:
(a) Modelo de Weiss modificado [Martins et al., 2008]. El modelo está basado en la función de densidad de energı́a de deformación (SEF) propuesta
por Weiss et al. [1996], que ha sido modificada para obtener las expresiones
analı́ticas de dicha SEF (expresión (5.3)). Esta SEF ha sido utilizada anteriormente por Calvo et al. [2009] para modelar el tejido vaginal.
Ψ̄ = C1 (I¯1 − 3) + Ψ̄f
Ψ̄f = 0
I4 < I¯40
C3
¯ ¯
(expC4 (I4 −I40 ) −C4 (I¯4 − I¯40 ) − 1)
I¯4 > I¯40 y I¯4 < I¯4ref
C4
p
(5.3)
I¯4 > I¯4ref
Ψ̄f = 2C5 I¯4 + C6 ln(I¯4 ) + C7
Ψ̄f =
I¯1 representa el primer invariante modificado del tensor modificado de CauchyGreen [Spencer, 1954], I¯4 > I¯40 caracteriza la respuesta mecánica en la dirección de las fibras y I¯4ref caracteriza el alargamiento al cual las fibras de
colágeno comienzan a alinearse; C1 > 0, C3 > 0, C5 > 0, y C6 < 0 son
parámetros con unidades de tensión, C4 > 0 es un parámetro adimensional.
Se ha supuesto que la energı́a de deformación correspondiente a los términos de
Modelado del ojo humano y tratamientos refractivos
162
anisotropı́a únicamente contribuyen a la respuesta mecánica global del tejido
cuando se alarga, es decir, I¯4 > I¯40 . C5 , C6 y C7 refuerzan la continuidad de
la deformación, tensión y derivadas.
(b) Modelo de Holzapfel. Según el modelo de Holzapfel and Gasser [2000], se
plantea la siguiente SEF:
Ψ̄ = C1 (I¯1 − 3) + Ψ̄f
Ψ̄f = 0
I¯4 < I¯40
Ψ̄f =
+
C3
exp{[C4 {(I¯4 − 1)2 ] − 1}+
2C4
C5
exp{[C6 {(I¯6 − 1)2 ] − 1}
2C6
I¯4 > I¯40
(5.4)
Tomaremos C5 = C3 y C6 = C4 pues en el tejido corneal las fibras de colágeno
dispuestas en las orientaciones horizontal y vertical presentan similares caracterı́sticas mecánicas.
5.3.2
Estimación de los parámetros
Los resultados experimentales provienen de un ensayo de tracción uniaxial en la
1
dirección de las fibras con n = ez , por tanto λz = λ, λx = λy = λ− 2 y I4 = λ2 , el
tensor de tensión de Cauchy σe es diagonal con σzz = σ, σxx = σyy = 0 [Merodio
and Goicolea, 2007].
El ajuste de los datos experimentales se realiza utilizando una implementación
del algoritmo de minimización de Levenberg-Marquardt [Marquardt, 1963]. Este
algoritmo, ampliamente utilizado para el ajuste de datos experimentales [Holzapfel
et al., 2005], se basa en la minimización de una función objetivo χ2 que toma la
forma representada por la expresı́ón (5.5) para el test de tracción uniaxial:
2
χ =
n h
X
¡
σ − σΨ
¢2 i
i
(5.5)
i=1
donde σi y σiΨ representan la medida y los valores ajustados de tensión para el punto
i-ésimo, respectivamente. La calidad de los ajustes ha sido evaluada mediante el
cálculo del coeficiente de determinación R2 . El error cuadrático medio normalizado
ε, ecuación (5.6), también se calcula para cada ajuste.
q
ε=
χ2
n−q
µ
(5.6)
Capı́tulo 5. Caracterización de las propiedades de material de los tejidos
163
En esta ecuación, q es el número de parámetros de la SEF, n − q es el número de
n
1 P
[σ] .
grados de libertad y µ es la tensión media definida como µ =
n i=1 i
Se han realizado dos aproximaciones distintas. Por un lado, se ajusta cada curva
experimental, resultando 9 conjuntos de parámetros para el tejido corneal (ajuste
de los datos). La media y la desviación tı́pica de cada parámetro también han
sido calculadas (parámetros promedio). Por otra parte, se ha realizado el ajuste
de la curva media de las obtenidas experimentalmente (ajuste de datos promedio),
resultando un conjunto de parámetros para la caracterización del tejido corneal.
12
6
Experimental
Analytical
5
3
4
2
2
1
0
1
0
1
1.05
1.1
λ
1.15
1.2
1.25
(a) TCC1
10
1
1.05
1.1
λ
0
1
1.15
6
10
4
2
2
0
1
1.2
(d) TCC4
10
Experimental
Analytical
λ
1.1
0
1
1.15
1.05
1.1
λ
1.15
1.2
1.25
(f) TCC6
12
Experimental
Analytical
10
Experimental
Analytical
8
σ (MPa)
8
6
6
4
4
2
2
0
1
1.05
(e) TCC5
12
1.2
6
2
1.15
1.15
8
6
4
1.1
λ
1.1
λ
12
Experimental
Analytical
4
1.05
1.05
(c) TCC3
8
σ (MPa)
σ (MPa)
3
2
12
Experimental
Analytical
8
σ (MPa)
4
(b) TCC2
12
0
1
Experimental
Analytical
5
σ (MPa)
6
10
6
4
σ (MPa)
σ (MPa)
8
7
Experimental
Analytical
σ (MPa)
10
1.05
1.1
λ
1.15
(g) TCC7
1.2
1.25
0
1
1.05
1.1
λ
(h) TCC8
1.15
1.2
(i) TCC9
Figura 5.14: Curvas tensión de Cauchy vs alargamiento, experimental (+ azul) y
analı́tica (lı́nea roja) según el modelo de Martins et al. [2008], para los especı́menes
de córnea de cerdo TCC1-9.
Modelado del ojo humano y tratamientos refractivos
164
10
10
Experimental
Analytical
8
6
σ (MPa)
σ (MPa)
8
4
4
2
0
1
6
2
1.05
1.1
λ
(a)
1.15
1.2
0
1
1.05
1.1
λ
1.15
1.2
1.25
(b)
Figura 5.15: (a) Ajuste de los parámetros de la curva media, en rojo, de las obtenidas
experimentalmente (cruces en azul). (b) Curva media (±SD), en azul, vs curva de
la media de los parámetros, en rojo.
Tejido corneal sano
Las curvas tensión vs alargamiento obtenidas mediante el ensayo de las muestras
de este tejido que se han presentado en el apartado 5.2.1, se analizan según los
dos modelos de SEF expuestos anteriormente: el modelo de Calvo et al. [2009] y el
modelo de Holzapfel and Gasser [2000].
La Tabla 5.5 muestra los resultados de la estimación de los parámetros para el
tejido corneal, incluyendo el ajuste de datos y los parámetros promedio, siguiendo el modelo de Martins et al. [2008]. En todos los casos, los valores de R2 son
próximos a la unidad, y valores muy pequeños de ε confirman la bondad del ajuste.
Los valores medios de los parámetros son C1 = 0, 060990 ± 0, 174900 MPa; C3 =
0, 261266±0, 318669 MPa; C4 = 11, 470649±5, 286081; C5 = 79, 841628±18, 921317
MPa, C6 = −85, 804281 ± 20, 335977 MPa, C7 = −79, 585241 ± 18, 865225 MPa,
I¯40 = 1, 014734 ± 0, 007849, I¯4ref = 1, 234331 ± 0, 007561. La Figura 5.14 muestra
la relación tensión-alargamiento analı́tica obtenida para cada curva experimental.
En la Figura 5.15 (a) se muestra el ajuste de los parámetros correspondientes
a la curva media de las obtenidas experimentalmente, representada por cruces en
color azul. La Figura 5.15 (b) muestra dicha curva media, en azul, superpuesta a
la obtenida mediante la media de los parámetros, en rojo. Se observa que ambas
curvas son considerablemente diferentes. Los diversos parámetros caracterizan el
comportamiento de forma conjunta, por lo que su consideración aislada en forma de
media de todas las muestras no constituye una buena aproximación.
Un segundo análisis se ha llevado a cabo para estimar los parámetros según
el modelo de Holzapfel and Gasser [2000]. En la Tabla 5.6 se indican los valores
de los parámetros obtenidos para algunos especı́menes de córnea de cerdo y los
valores promedio. En todos los casos, los valores de R2 son próximos a la unidad,
y valores pequeños de ε confirman la bondad del ajuste. Los valores medios de los
Capı́tulo 5. Caracterización de las propiedades de material de los tejidos
Muestra
TCC1
TCC2
TCC3
TCC4
TCC5
TCC6
TCC7
TCC8
TCC9
T CCmean
Media
SD
C1
0,001000
0,001000
0,001000
0,001000
0,001000
0,001000
0,014680
0,001000
0,527233
0,001000
0,060990
0,174900
C3
0,005473
0,406863
0,970214
0,168696
0,162633
0,045214
0,074217
0,507223
0,010857
0,034520
0,261266
0,318669
C4
20,143758
6,634709
3,959437
10,709041
10,876257
14,210116
11,689393
7,126896
17,886231
17,391738
11,470649
5,286081
C5
67,280417
73,175652
54,313911
104,443870
105,911207
77,569069
61,610820
98,997480
75,272223
74,065549
79,841628
18,921317
C6
-73,247988
-77,613598
-57,144590
-112,235422
-113,852558
-83,881032
-66,338992
-105,391962
-82,532384
-79,325159
-85,804281
20,335977
C7
-67,009498
-72,997908
-54,208297
-104,115804
-105,576207
-77,294101
-61,409622
-98,741089
-74,914646
-73,866251
-79,585241
18,865225
Ī40
1,000000
1,002001
1,020100
1,018081
1,018081
1,018081
1,018081
1,018081
1,020100
1,020100
1,014734
0,007849
Ī4ref
1,232100
1,229881
1,232100
1,232100
1,232100
1,232100
1,232100
1,232100
1,254400
1,199025
1,234331
0,007561
165
R2
0,997019
0,996923
0,996124
0,997236
0,999364
0,998268
0,997817
0,998254
0,996601
0,992219
0,997512
0,001004
Tabla 5.5: Parámetros de material mediante ajuste según modelo de Martins et al.
[2008] obtenidos para el tejido corneal. R2 es el coeficiente de determinación, cuyo
valor óptimo es la unidad; y ² es el error cuadrático medio normalizado. Ci , I¯40 ,
I¯4ref es el conjunto de parámetros del ajuste de los datos experimentales; Cmean son
los parámetros del ajuste de los datos promedio. Los valores están en MPa.
Muestra
TCC1
TCC3
TCC4
TCC5
TCC6
Media
SD
C1
0.002500
0.002500
0.002500
0.002500
0.002500
0,002500
0,000000
C3
4.085619
4.368111
4.045027
4.372525
3.704159
4,115088
0,2756104
C4
7.243825
3.368968
7.587589
6.861596
3.686321
5,749660
2,047680
R2
0.986953
0.980597
0.980674
0.978098
0.960737
0,977412
0,009879
²
0.102534
0.119959
0.143438
0.138301
0.18679
0,138582
0,032325
Tabla 5.6: Parámetros de material de algunos especı́menes de córnea de cerdo sana
mediante ajuste por el modelo de Holzapfel.
(a) TCC1
(b) TCC3
(d) TCC5
(c) TCC4
(e) TCC6
Figura 5.16: Curvas tensión de Cauchy vs alargamiento, experimental (+ azul) y
analı́tica (lı́nea roja) según el modelo de Holzapfel, para los especı́menes de córnea
de cerdo TCC1,TCC3-6.
ε
0,058131
0,051252
0,056140
0,056797
0,024853
0,042962
0,047035
0,027326
0,038354
0,048538
0,044761
0,012475
Modelado del ojo humano y tratamientos refractivos
166
Muestra
TEC01
TEC02
TEC03
TEC04
TEC05
TEC06
TEC07
TEC08
TEC09
TEC10
TEC11
T ECmean
Media
SD
C1
10,5994
0,5109
4,5834
0,0010
0,0450
0,0010
0,0010
0,0010
0,6013
0,0241
1,0596
0,6641
0,2494
0,3854
C3
0,0011
0,5103
4,8760
1,2793
0,0265
0,3773
0,1413
0,4313
0,0448
1,2647
1,6869
0,1111
0,6403
0,3127
C4
0,0011
5,9705
0,5502
2,6344
15,8167
4,5096
8,0250
6,9097
14,5567
3,2921
2,5940
11,9410
7,1454
4,9395
C5
0,0000
30,7556
22,8253
46,6774
47,1953
23,5788
24,3750
53,4083
58,0706
33,5199
27,5898
31,7883
38,3523
13,1030
C6
0,0000
-32,1716
-24,0838
-50,3223
-50,6868
-24,6998
-25,6116
-55,9680
-62,2645
-34,3948
-28,3321
-33,4234
-40,4946
14,3144
C7
0,0000
-30,7189
-22,7706
-46,4988
-47,0568
-23,5409
-24,3352
-53,3275
-57,9060
-33,5018
-27,5781
-31,7405
-38,2738
13,0500
Ī40
1,0201
1,0609
1,0404
1,0609
1,0201
1,0201
1,0201
1,0201
1,0201
1,0201
1,0404
1,0404
1,0314
0,0180
Ī4ref
1,0404
1,1664
1,3225
1,3225
1,2100
1,2100
1,1881
1,1881
1,2100
1,1449
1,1236
1,1664
1,1960
0,0564
R2
0,9966
0,9999
0,9994
0,9986
0,9994
0,9991
0,9996
0,9992
0,9991
0,9985
0,9986
0,9996
0,9991
0,0005
ε
0,0397
0,0088
0,0163
0,0291
0,0195
0,0276
0,0147
0,0191
0,0230
0,0304
0,0322
0,0173
0,0227
0,0079
Muestra
TEH1
TEH2
TEH3
Media
SD
C1
3,2120
1,8517
0,5281
1,8639
1,3420
C3
0,1151
0,2145
0,4049
0,2448
0,1473
C4
18,3341
14,9359
5,3628
12,8776
6,7262
C5
45,9753
106,2486
47,4327
66,5522
34,3858
C6
-47,3781
-111,0095
-50,5715
-69,6530
35,8513
C7
-45,9498
-106,1237
-47,2985
-66,4573
34,3587
Ī40
1,0201
1,0201
1,0201
1,0201
0,0000
Ī4ref
1,1025
1,1449
1,2544
1,1673
0,0784
R2
0,9987
0,9993
0,9991
0,9990
0,0003
ε
0,0236
0,0173
0,0211
0,0207
0,0032
Tabla 5.7: Parámetros de material del modelo obtenidos para el tejido escleral de
cerdo (TEC01-11) y de humano (TEH1-3). Ci , I¯40 , I¯4ref es el conjunto de parámetros
del ajuste de los datos experimentales; R2 es el coeficiente de determinación, cuyo
valor óptimo es la unidad; y ² es el error cuadrático medio normalizado. T ECmean y
T EHmean son los parámetros del ajuste de los datos promedio obtenidos para tejido
de cerdo y de humano, respectivamente. TEC01 y TEC03 no se han considerado
para la media y la desviación tı́pica. Los valores de los parámetros están en MPa.
parámetros son C1 = 0, 002500 ± 0, 00000 MPa; C3 = 4, 115088 ± 0, 2756104 MPa;
C4 = 5, 749660 ± 2, 047680. La Figura 5.16 muestra la relación tensión-alargamiento
analı́tica según el modelo de Holzapfel and Gasser [2000] obtenida para cada curva
experimental.
De las Figuras 5.14 y 5.16 se puede deducir que el modelo de Martins et al. [2008]
realiza un ajuste mucho más preciso del comportamiento del tejido que el logrado por
el modelo de Holzapfel and Gasser [2000], especialmente en la zona del “talón” tras
la región inicial de la curva. El valor medio del coeficiente de determinación es, en
el primer caso, de 0,9975 [Martins et al., 2008], y en el segundo, de 0,9774 [Holzapfel
and Gasser, 2000]. Por este motivo, los tejidos que se analizan posteriormente se
han ajustado únicamente mediante el modelo de Martins et al. [2008].
Tejido escleral
La Tabla 5.7 muestra los resultados de la estimación de los parámetros para el
tejido escleral, incluyendo el ajuste de datos y los parámetros promedio, siguiendo el
modelo de Martins et al. [2008]. En todos los casos, los valores de R2 son próximos a
la unidad, y valores muy pequeños de ε confirman la bondad del ajuste. Los valores
medios de los parámetros son: C1 = 0, 2494 ± 0, 3854 MPa; C3 = 0, 6403 ± 0, 3127
MPa; C4 = 7, 1454±4, 9395; C5 = 38, 3523±13, 1030 MPa, C6 = −40, 4946±14, 3144
MPa, C7 = −38, 2738±13, 0500 MPa, I¯40 = 1, 0314±0, 0180, I¯4ref = 1, 1960±0, 0564.
Capı́tulo 5. Caracterización de las propiedades de material de los tejidos
(a) TEC01
(b) TEC02
(c) TEC03
(d) TEC04
(e) TEC05
(f) TEC06
(g) TEC07
(h) TEC08
(i) TEC09
167
Figura 5.17: (a-i) Curvas tensión de Cauchy vs alargamiento, experimental (+ azul)
y analı́tica (lı́nea roja) según el modelo de Martins et al. [2008], para algunos especı́menes de esclera (TEC01-TEC09).
La Figura 5.17 muestra la relación tensión-alargamiento analı́tica según el modelo
de Martins et al. [2008] obtenida para cada curva experimental. Las muestras TEC01
y TEC03 son muy diferentes de las demás, no observándose la región del “talón”
inicial, por lo que ambas han sido descartadas y no han sido consideradas para la
obtención de la curva media ni en el cómputo de la media de los parámetros.
La Figura 5.18 (a) representa las curvas correspondientes a las probetas consideradas, es decir, TEC02 y TEC04-11, ya que TEC01 y TEC03 se han descartado,
como se ha comentado anteriormente. Se representa, a su vez, la curva media (en
Modelado del ojo humano y tratamientos refractivos
168
5
σ (MPa)
4
3
2
1
0
1
E2
E4
E5
E6
E7
E8
E9
E10
E11
1.05
λ
1.1
1.15
Figura 5.18: (a) Curva media de las obtenidas con los especı́menes TEC02, TEC04TEC11 de esclera de cerdo. (b) Ajuste de la curva media según el modelo de comportamiento de Martins et al. [2008].
azul) obtenida para el comportamiento del tejido escleral de cerdo, procediéndose
al ajuste de los parámetros de dicha curva media, según se muestra en la Figura
5.18 (b), en la que los valores medios de las curvas se representan mediante cruces
en azul, y la curva analı́tica, en lı́nea continua de color rojo. El ajuste logrado es
apreciablemente preciso (R2 =0,9991).
Respecto al tejido escleral humano, se ha realizado el ajuste de las curvas experimentales y los valores obtenidos para los parámetros del modelo se incluyen también
en la Tabla 5.7. Sin embargo, según lo expuesto en el apartado 5.2.2, carece de sentido caracterizar el tejido únicamente con los resultados experimentales de estas tres
muestras.
Tejido corneal con tratamiento de cross-linking
El principal interés de este estudio es el de analizar el efecto del tratamiento de
cross-linking sobre el tejido corneal. Con este fin se clasificaron las muestras en tres
grupos de tratamiento, como se expuso en el apartado 5.2.3. De esta forma, se ha
realizado el análisis de las curvas medias correspondientes a cada grupo de estudio.
Los resultados de la estimación de los parámetros para cada uno de los grupos considerados se recogen en la Tabla 5.8. Se incluyen tanto los valores del ajuste correspondientes al modelo de Martins et al. [2008] como los parámetros promedio. Dichos
valores medios de los parámetros son: para el grupo A, C1 = 0, 0340 ± 0, 0467 MPa;
C3 = 0, 7547 ± 1, 4014 MPa; C4 = 8, 1707 ± 6, 8692; C5 = 31, 0488 ± 5, 2036 MPa,
C6 = −34, 5433±6, 3263 MPa, C7 = −30, 7832±5, 1640 MPa, I¯40 = 1, 1281±0, 1657,
I¯4ref = 1, 3465 ± 0, 1961; para el grupo B, C1 = 1, 2268 ± 1, 4526 MPa; C3 =
0, 3564 ± 0, 3355 MPa; C4 = 8, 8346 ± 7, 3214; C5 = 40, 1116 ± 15, 2319 MPa,
C6 = −42, 8850 ± 16, 7791 MPa, C7 = −39, 9996 ± 15, 1656 MPa, I¯40 = 1, 0447 ±
0, 0337, I¯4ref = 1, 2278 ± 0, 0243; para el grupo C, C1 = 0, 0337 ± 0, 0455 MPa;
C3 = 0, 1358 ± 0, 0908 MPa; C4 = 9, 5602 ± 3, 9948; C5 = 29, 4370 ± 6, 5048 MPa,
C6 = −31, 7718±7, 1117 MPa, C7 = −29, 3358±6, 4756 MPa, I¯40 = 1, 0611±0, 0290,
I¯4ref = 1, 2455 ± 0, 0199.
Capı́tulo 5. Caracterización de las propiedades de material de los tejidos
Muestra
TCT03
TCT04
TCT07
TCT14
TCT15
T CTmean,Control
Media
SD
C1
0,0010
0,0664
0,0010
0,0010
0,1005
0,0010
0,0340
0,0467
C3
0,1902
0,2568
0,0653
0,0058
3,2554
0,2811
0,7547
1,4014
Muestra
TCT01
TCT02
TCT06
TCT10
TCT13
T CTmean,30min
Media
SD
C1
3,0861
2,4770
0,5522
0,0176
0,0010
0,0010
1,2268
1,4526
C3
0,9092
0,3588
0,0091
0,2861
0,2186
0,6780
0,3564
0,3355
Muestra
TCT05
TCT08
TCT09
TCT11
TCT12
T CTmean,1h
Media
SD
C1
0,0010
0,0010
0,0714
0,0942
0,0010
0,0010
0,0337
0,0455
C3
0,0771
0,1559
0,2108
0,2246
0,0108
0,1387
0,1358
0,0908
Grupo A: Sin tratamiento
C4
C5
C6
C7
4,7648
32,0285
-39,9091
-31,1111
6,9108
35,5619
-38,3473
-35,4424
8,8985
23,6087
-25,5051
-23,5233
19,2849
35,8780
-38,6685
-35,7644
0,9943
28,1670
-30,2867
-28,0748
5,8709
27,7941
-29,8896
-27,7065
8,1707
31,0488
-34,5433
-30,7832
6,8692
5,2036
6,3263
5,1640
Grupo B: Tratamiento CXL 30 minutos
C4
C5
C6
C7
3,1158
30,4822
-31,7547
-30,4410
5,3972
31,5544
-331583
-31,4989
21,6129
65,5916
-70,8433
-65,3754
7,1773
43,0323
-46,4331
-42,8855
6,8699
29,8975
-32,2358
-29,7972
4,1894
47,6634
-50,5449
-47,5437
8,8346
40,1116
-42,8850
-39,9996
7,3214
15,2319
16,7791
15,1656
Grupo C: Tratamiento CXL 1 hora
C4
C5
C6
C7
8,6476
25,6852
-27,7304
-25,5934
8,9946
39,8937
-43,2214
-39,7449
6,9350
29,4124
-31,7180
-29,3134
6,7451
29,5257
-31,8250
-29,4274
16,4787
22,6678
-24,3640
-22,6001
7,7468
29,1905
-31,4835
1,0609
9,5602
29,4370
-31,7718
-29,3358
3,9948
6,5048
7,1117
6,4756
169
Ī40
1,4161
1,0816
1,0404
1,0000
1,1025
1,0816
1,1281
0,1657
Ī4ref
1,6900
1,2544
1,2544
1,2110
1,3225
1,2544
1,3465
0,1961
R2
0,9977
0,9993
0,9991
0,9976
0,9996
0,9994
0,9987
0,0009
ε
0,1256
0,0251
0,0276
0,0448
0,0187
0,0247
0,0484
0,0442
Ī40
1,0201
1,0201
1,0201
1,0816
1,0816
1,0201
1,0447
0,0337
Ī4ref
1,2100
1,2100
1,2100
1,2544
1,2544
1,2544
1,2278
0,0243
R2
0,9994
0,9995
0,9986
0,9998
0,9996
0,9987
0,9994
0,0005
ε
0,0164
0,0166
0,0325
0,0150
0,01756
0,0303
0,0196
0,0073
Ī40
1,0404
1,0816
1,0816
1,0816
1,0201
1,2544
1,0611
0,0290
Ī4ref
1,2544
1,2544
1,2544
1,2544
1,2100
0,9991
1,2455
0,0199
R2
0,9992
0,9994
0,9995
0,9999
0,9992
0,0309
0,9994
0,0003
ε
0,0273
0,0239
0,0213
0,0107
0,0288
0,0224
0,0072
Tabla 5.8: Parámetros de material de tejido corneal correspondientes a los distintos
grupos de tratamiento de cross-linking. Ci , I¯40 , I¯4ref es el conjunto de parámetros
del ajuste de los datos experimentales; R2 es el coeficiente de determinación, cuyo
valor óptimo es la unidad; y ² es el error cuadrático medio normalizado. TCTmean
son los parámetros del ajuste de los datos promedio; Media y SD son la media y la
desviación tı́pica de los valores de cada grupo. Los valores de las constantes están
en MPa.
La Figura 5.19 muestra la relación tensión-alargamiento analı́tica obtenida para
las curvas experimentales correspondientes a las muestras TCT01-09. Las curvas
medias correspondientes a los diversos grupos se muestran en la Figura 5.20 (a). El
Grupo A, grupo control, está formado por las muestras ensayadas sin tratamiento
(curva azul); el Grupo B, por las muestras tratadas durante un periodo de exposición
de 30 minutos (curva verde), y el Grupo C, las muestras tratadas durante un periodo
de exposición de una hora (curva roja). Las curvas correspondientes al ajuste de
los parámetros del modelo de Martins et al. [2008] de cada uno de los grupos se
muestran en las Figuras 5.20 (b), (c) y (d).
En la Figura 5.20 (a) se observa que el tratamiento de cross-linking según la
aplicación del protocolo estándar (irradiación UVA de 30 minutos) logra rigidizar
considerablemente el tejido debido a la creación de nuevos enlaces entre las fibras
de colágeno [Spoerl et al., 1998], mientras que si se realiza una aplicación más prolongada, de 60 minutos, el tejido muestra un comportamiento elástico similar al del
tejido no tratado, quedando las curvas superpuestas. Este hecho podrı́a explicarse
por la posible destrucción de los enlaces de colágeno creados durante los primeros
30 minutos o bien de los presentes previamente al tratamiento, lo que indica que
un tratamiento más prolongado del indicado por el tratamiento estándar no debe
aplicarse en caso de patologı́as corneales ectásicas, en las que el tejido está más debil
Modelado del ojo humano y tratamientos refractivos
170
(a) TCT01
(b) TCT02
(c) TCT03
(d) TCT04
(e) TCT05
(f) TCT06
(g) TCT07
(h) TCT08
(i) TCT09
Figura 5.19: Curvas tensión de Cauchy vs alargamiento, experimental (+ azul) y
analı́tica (lı́nea roja) según el modelo de Martins et al. [2008], para algunos especı́menes de tejido corneal con tratamiento de cross-linking (a-h) y la media (i).
Capı́tulo 5. Caracterización de las propiedades de material de los tejidos
(a) Curvas medias
(c) 30 minutos
171
(b) 1 hora
(d) Control
Figura 5.20: (a) Ajuste por el modelo de Martins et al. [2008] de las curvas medias
de los tres grupos: irradiación UVA durante un periodo de exposición de 1 hora
(rojo), de 30 minutos (verde) y grupo control (azul). (b), (c) y (d) Ajuste de los
parámetros de las curvas medias de dichos grupos.
que en una córnea sana.
Se realizó un análisis estadı́stico del diferente comportamiento entre los grupos,
determinando la tensión correspondiente a la curva media de cada grupo para un
valor de deformación de 12%, considerándose diferencias estadı́sticamente significativas para valores de p<0,05. Se concluye que la rigidización del tejido provocada
por el tratamiento de cross-linking, con un tiempo de exposición de 30 minutos respecto al grupo control, es estadı́sticamente significativa (p=0,028 para λ = 12%).
De la misma forma, la aplicación de tratamiento de cross-linking, con un tiempo
de exposición de 60 minutos respecto al grupo de tratamiento con exposición de 30
minutos, es también estadı́sticamente significativa (p=0,0278 para λ = 12%). El
comportamiento del tejido tratado con un tiempo de exposición de 60 minutos es
similar al del tejido sin tratamiento, como demuestra un elevado valor del parámetro
p entre estos dos grupos de estudio (p=0,441 para λ = 12%).
Las curvas correspondientes a las dos córneas humanas ensayadas, CHT1 y
172
Modelado del ojo humano y tratamientos refractivos
(a) CHT1
(b) CHT2
Figura 5.21: Curvas tensión de Cauchy vs alargamiento, experimental (+ azul) y
analı́tica (lı́nea roja) según el modelo de Martins et al. [2008], para las dos córneas
humanas ensayadas.
CHT2, se muestran en la Figura 5.21. Ambas muestran un comportamiento similar al obtenido para los grupos correspondientes a córnea de cerdo: CHT1, con
tratamiento mediante irradiación UVA de 30 minutos (Figura 5.21 (a)) y CHT2, sin
tratamiento (Figura 5.21 (b)), considerablemente menos rı́gida que la córnea tratada
CHT1 (por ejemplo, la curva correspondiente a la córnea tratada requiere 4 MPa
para una deformación del 15%, mientras que la córnea sin tratamiento, 3 MPa).
5.4
Determinación de las propiedades viscoelásticas
del tejido corneal
Para caracterizar la viscoelasticidad del tejido corneal, en este estudio se ha
diseñado una metodologı́a que permite determinar las propiedades viscoelásticas del
tejido mediante un único ensayo mediante el cual se obtiene tanto el efecto de la
velocidad como las curvas de relajación de tensiones. Las probetas de tejido se
obtienen según la metodologı́a explicada en el apartado 5.1. El comportamiento
viscoelástico del tejido corneal se ajustará con el modelo viscohiperelástico descrito
en el Capı́tulo 4.
5.4.1
Realización del ensayo de viscoelasticidad mediante
ciclos de relajación
Los ensayos experimentales realizados consistieron en la realización de sucesivos
ciclos de relajación de tensiones sobre el tejido corneal en la dirección longitudinal
según la disposición de las fibras de colágeno. El ensayo comienza realizando tres
ciclos de preacondicionamiento, al igual que los realizados en el ensayo monotónico
(ver apartado 5.1.4). Dichos ciclos se ejecutan a una velocidad de 0,95 mm·min−1
hasta alcanzar una carga de 0,3 N. Posteriormente, se realiza un periodo de relajación
Capı́tulo 5. Caracterización de las propiedades de material de los tejidos
(a)
173
(b)
Figura 5.22: Ensayo de relajación de tensiones. (a) Carga (N) vs tiempo (s). (b)
Tensión de Cauchy (MPa) vs alargamiento.
de 15 minutos. A continuación, se ejecutan nuevamente tres ciclos de carga hasta un
valor de 0,3 N, a una velocidad de máquina de 20 mm·min−1 , valor que se mantendrá
hasta la finalización del ensayo. Tras los ciclos de preacondicionamiento, sigue un
periodo de relajación de 15 minutos. La última fase del ensayo consiste en realizar
cinco ciclos de carga-relajación. El parámetro fijado para la finalización del ensayo
es un alargamiento final de λ=1,15 por lo que se debe incrementar, en cada uno de
=0,03. Tras cada ciclo de carga se produce un ciclo de
los cinco ciclos, ∆λ = 1,15−1
5
relajación de 15 minutos de duración.
La Figura 5.22 representa el ensayo de relajación de tensiones para un especı́men
de córnea de cerdo: (a) carga aplicada vs tiempo, (b) curva tensión de Cauchy
vs deformación. En ambas figuras se pueden apreciar los dos ciclos iniciales de
preacondicionamiento a baja y alta velocidad, y los cinco ciclos de relajación. A
partir de la Figura 5.22 (b) podemos construir las curvas envolventes tensión de
Cauchy vs deformación correspondientes a los cinco valores de tensión de pico (σ0 )
y los cinco valores de tensión elástica (σf ) mostradas en la Figura 5.23. En esta figura
se incluye la media y la desviación tı́pica de los tres ensayos realizados, observándose
poca variabilidad de los resultados. Además, para cada especı́men se obtienen las
curvas de relajación, correspondientes a cada uno de los cinco niveles de deformación
aplicados (Figura 5.24) y son normalizadas mediante la expresión
S=
tension en t
σt
+ = +
tension en t0
σ0
(5.7)
según la cual, la tensión normalizada se obtiene como el cociente entre el valor de
tensión de Cauchy en cada instante σt y el valor de la tensión inicial del ciclo, σ0+ .
Analizando la desviación tı́pica de las curvas de las Figuras 5.23 y 5.24 se observa muy poca variabilidad entre las curvas experimentales de las tres muestras
Modelado del ojo humano y tratamientos refractivos
174
Figura 5.23: Curva media de las obtenidas mediante ensayo de relajación con tejido
corneal de cerdo. En azul, curva envolvente de valores de pico, σ0 , correspondiente
a velocidad rápida. En rojo, curva correspondiente a velocidad lenta, envolvente de
los valores asintóticos σf alcanzados al final de cada ciclo de relajación.
1
1
1
lambda1131
lambda2131
0.8
lambda1
lambda1
σf/σ0
σf/σ0
139
mean
0.6
0.6
lambda2138
0.9
lambda2139
0.8
lambda2
mean
0.4
σf/σ0
lambda1138
0.8
lambda3131
lambda3138
lambda3139
lambda3
mean
0.7
0.6
0.4
0.2
0.2
0
200
400
600
tiempo
800
0.5
0
0
1000
200
(a) λ1 = 1, 0789
400
600
tiempo
800
1000
0.4
0
(b) λ2 = 1, 1089
1
lambda4138
mean
σf/σ0
lambda4
0.7
lambda5138
0.9
lambda4139
0.8
lambda5139
0.85
lambda5
mean
0.8
800
1000
λ=1.0789
λ=1.1089
λ=1.1388
λ=1.1689
λ=1.199
lambda5131
0.95
σf/σ0
lambda4131
0.8
σf/σ0
400
600
tiempo
(c) λ3 = 1, 1388
1
0.9
0.6
0.75
0.6
0.4
0.7
0.5
0.4
0
200
0.65
200
400
600
tiempo
800
(d) λ4 = 1, 1689
1000
0
200
400
600
tiempo
(e) λ5 = 1, 1990
800
0.2
0
200
400
600
Tiempo
800
1000
(f) λ1 − λ5
Figura 5.24: Ensayo de relajación con especı́menes de córnea de cerdo para distintos
alargamientos.
Capı́tulo 5. Caracterización de las propiedades de material de los tejidos
175
analizadas.
Según se observa en la Figura 5.24, el porcentaje de relajación obtenido depende
del nivel de deformación aplicado. Se obtiene mayor relajación de tensiones cuanto
menor es la deformación impuesta. Por ejemplo, para el mayor nivel de deformación
(1,1990) se produce un porcentaje de relajación de 35% aproximadamente, y para
el menor nivel de deformación (0,0789), la relajación es de un 70%, según se puede
observar en la Figura 5.24 (f). Por tanto, la relajación de tensiones es no-lineal y
depende del nivel de deformación impuesto.
5.4.2
Modelo de viscoelasticidad. Estudio de la bondad del
modelo
Con el objetivo de ilustrar el funcionamiento y capacidad del modelo propuesto
para reproducir los fenómenos viscoelásticos del tejido corneal, a continuación se
muestra un ejemplo de ajuste de parámetros a partir de las curvas experimentales
obtenidas en el apartado anterior.
El ajuste de los datos experimentales se realizó a través de la minimización de
una función objetivo (5.8) mediante el algoritmo de Levenberg-Marquardt, donde σ
son los datos experimentales obtenidos para la tensión de Cauchy, σ Ψ es la tensión
de Cauchy en cada punto i obtenida por el modelo, y n es el número de datos
h¡
¢
¡
¢
¡
¢i
Ψ 2
2
n
Ψ 2
Ψ 2
χ = Σi=1 σe − σe i + σvs − σvs i + σvl − σvl i
(5.8)
donde σe es la parte elástica de la tensión, σvs la parte viscoelástica correspondiente
a la respuesta a corto plazo y σvl la parte viscoelástica correspondiente a la respuesta
a largo plazo, y que se definen a continuación.
La bondad del ajuste se obtuvo calculando el coeficiente
R2 = 1 −
¡
¢2
Σni=1 σ − σ Ψ i
Σni=1 (σ − µ)2i
(5.9)
donde σ y σ Ψ representan los valores de la tensión experimentales y ajustados,
respectivamente para cada punto i y µ la media de las tensiones experimentales µ =
Σn
i=1 (σ)i
. También se ha calculado la medida del error medio cuadrado normalizado
n
ε mediante
q
ε=
χ2
n−q
µ
(5.10)
donde q es el número de parámetros de la función densidad de energı́a, con lo que
n − q es el número de grados de libertad.
Aunque la Figura 5.24 (f) evidencia un comportamiento no-lineal, dependiente
del nivel de deformación aplicado, en este caso el ajuste se ha realizado considerado
una relajación lineal, tomando la curva media, que corresponde a λ=1,1388.
Modelado del ojo humano y tratamientos refractivos
176
La parte elástica del modelo ha sido ajustada suponiendo que la aplicación de
la carga es prácticamente instantánea (por ejemplo, 20 mm/min) y que el tejido es
incompresible [Carew et al., 1968]. En este caso, la función densidad de energı́a utilizada ha sido la correspondiente al modelo de Holzapfel and Gasser [2000] (expresión
(5.16)).
La tensión de Cauchy σe viene dada por
1
2
2
σe = 2C1 [λ − ] + 2C3 expC4 (λ −1) λ2 (λ2 − 1)
λ
(5.11)
Los parámetros estimados en (5.11) alimentan el modelo viscohiperelástico para
ajustar la dependencia de los datos experimentales a la velocidad de deformación y
la relajación de tensiones. El estado de equilibrio se ajusta asumiendo que la carga
es aplicada cuasi-estáticamente (por ejemplo, 1%·min−1 de deformación [Elsheikh
et al., 2008], aproximadamente 0,003 mm·min−1 ). Con ello, la expresión de la tensión
en el equilibrio se puede calcular como
1
σe =(1 − γm1 − γm2 )[C1 (λ − )+
λ
2
2
2
+2(1 − γf1 − γf2 )C3 λ expC4 (λ −1) (λ2 − 1)
(5.12)
Durante el proceso de relajación de tensiones, el término de la tensión de la
integral (4.52) es independiente del tiempo (constante dentro de la integral), y por
tanto, durante el ensayo únicamente la parte exponencial evoluciona con el tiempo.
t
t
2 exp− τm
(exp τm (γm − 1) − γm )(C1 λ)(λ3 − 1)−
σe = −
2
λ
− 2C3 exp
− τt
f
2 −1)
(expC4 (λ
t
)(exp τf (γf − 1) − γf )λ2
(5.13)
Los ajustes de parámetros que se muestran a continuación han sido realizados
para dos familias de variables internas, N = 2, que corresponde al caso unidimensional de un muelle en serie con dos elementos de Kelvin. En la Tabla 5.9 pueden
verse los parámetros ajustados para los ensayos realizados, correspondientes a las
curvas envolventes mostradas en la Figura 5.23. La Figura 5.25 (a) representa el
ajuste de las curvas envolventes a alta y baja velocidad. A alta velocidad, o velocidad de ensayo, el ajuste es óptimo, mientras que a baja velocidad se obtiene un
ajuste peor por ser la tensión dependiente de la deformación, como se ha comentado
anteriormente. La Figura 5.25 (b)) muestra la curva de relajación experimental
frente al ajuste realizado. Al tomar N = 2, el modelo es capaz de ajustar tanto
el primer tramo de la curva (en 125 segundos se produce el 35% de la relajación)
como el tramo final, prácticamente lineal, aunque se obtiene un error de ajuste en el
extremo final de la curva. Los resultados obtenidos pueden considerarse admisibles
puesto que el valor de R2 es cercano a 1 (R2 = 0, 9848).
Capı́tulo 5. Caracterización de las propiedades de material de los tejidos
177
1
σ Normalizada
0.9
0.8
Relajación exp
Relajación ajuste
0.7
0.6
0.5
0.4
0
500
Tiempo
(a)
1000
(b)
Figura 5.25: Ajuste de los resultados experimentales.
C1 (MPa)
C3 (MPa)
C4
R2
ε
0,01
1
γm
3,4367
2
γm
1,1074
1 (sec)
τm
0,9848
2 (sec)
τm
0.1152
γf1
τf1 (sec)
γf2
τf2 (sec)
0,7113
0,2886
9,9998
199,9999
0,2315
9,9465
0,2452
199,9698
Tabla 5.9: Parámetros elásticos y viscohiperelásticos para el tejido corneal.
En la bibliografı́a apenas se encuentran estudios de viscoelasticidad de tejido
corneal. Nyquist [1968] fue el primero en realizar ensayos con tejido corneal, determinando el módulo elástico de la córnea y observando un comportamiento viscoelástico no lineal. Boyce et al. [2007] realizó ensayos de ciclos de relajación con
córnea de bovino a bajos niveles de deformación (en zona fisiológica) a distintas velocidades, proponiendo un modelo de comportamiento viscoelástico que no llegaba
a reproducir los resultados experimentales. Observó que, cuanto mayor era la velocidad de ensayo, más rı́gido era el comportamiento del tejido. Además, mediante
la realización de ensayos de creep, se obtenı́a mayor deformación bajo mayores valores de carga. Este efecto observado en el ensayo de creep es análogo al obtenido
en los ensayos de relajación, según los cuales el tejido se relaja más cuanto menor
sea la deformación impuesta. Elsheikh et al. [2008] realizaron ensayos de tracción
uniaxial con muestras tomadas en distintas orientaciones de córneas de cerdo, a dos
velocidades de deformación (500%·mm−1 y 1%·mm−1 ) observando que, al igual que
sucede en otros tejidos blandos, el comportamiento es más rı́gido a mayor velocidad
[Ettema et al., 1998]. Estos resultados son similares cuantitativamente a los que
se han obtenido en el apartado anterior, donde la curva envolvente correspondiente
a alta velocidad es más rı́gida que la de baja velocidad (Figuras 5.23 y 5.25 (a)).
Cualitativamente, Elsheikh et al. [2008] obtuvo que el comportamiento a alta velocidad, para valores de alargamiento entre 10% y o 5%, es un 25% más rı́gido que
a baja, frente a un 40% obtenido en los presentes ensayos (Figuras 5.23, 5.25 (a)).
Esta diferencia puede deberse al diferente rango de velocidades de ensayo, siendo la
178
Modelado del ojo humano y tratamientos refractivos
máxima de nuestro ensayo de 20 mm·mm−1 que equivale, aproximadamente, a una
velocidad de deformación de 105%·mm−1 .
Finalmente, debe indicarse que en este estudio se ha realizado el ajuste de la
curva media de las cinco obtenidas. Para poder ajustar de forma simultánea las
cinco curvas de relajación serı́a necesario definir γi y τi en función de la deformación
[Peña et al., 2007a; Calvo et al., 2009].
5.5
Determinación de las propiedades de los tejidos del cristalino
Propiedades de núcleo y córtex
En la bibliografı́a existen pocos estudios de las propiedades de los tejidos que
componen el cristalino humano (cápsula, córtex y núcleo). Dichas propiedades no
pueden medirse in vivo, y las medidas in vitro no logran reproducir las condiciones
fisiológicas.
Los primeros trabajos que estimaron las propiedades de material del cristalino
fueron realizados por Fisher [1971], analizando la forma que adoptaba el cristalino
situado sobre un plato giratorio, al someterlo a distintas velocidades de giro en torno
a su propio eje. Fisher asumió ciertas hipótesis, entre las cuales, que la superficie
del cristalino es de sección elı́ptica, el núcleo es esférico y que núcleo y córtex tienen
un comportamiento de material elástico lineal e isótropo, deduciendo expresiones en
función de la edad para el cálculo del módulo de Young de córtex y núcleo.
Fisher [1971] utilizó 40 cristalinos humanos para la determinación del módulo de
Young del núcleo, EN , obteniendo el polinomio de mejor ajuste:
EN = an + bn A + cn A2 + dn A3
(5.14)
siendo A la edad del paciente y los valores de los coeficientes, cuyas unidades son
N
, son an = 0, 640, bn = −3, 529 × 10−3 , cn = 4, 286 × 10−4 , dn = 1, 518 × 10−5 . De
m2
forma similar, Fisher estableció el módulo de Young del córtex, EC , en función de
la edad:
E C = a c + bc A + cc A 2
(5.15)
donde A es la edad del paciente y los valores de los coeficientes, cuyas unidades son
N
, son ac = 0, 46, bc = 1, 45 × 10−1 , cc = −1, 484 × 10−3 .
m2
En el Capı́tulo 7 se realiza la simulación del mecanismo de acomodación utilizando modelos de cristalino humano de edades 30, 40 y 50 años. Se ha estimado
el módulo de Young de núcleo y córtex utilizando las expresiones (5.14) y (5.15).
Los valores correspondientes a esas tres edades de EN y EC son 5,5825×10−4 y
3,5000×10−3 Pa (30 años); 7,8460×10−4 y 3,9000×10−3 Pa (40 años); 1,3000×10−3
y 4,0000×10−3 Pa (50 años).
Capı́tulo 5. Caracterización de las propiedades de material de los tejidos
Núcleo
Núcleo
Núcleo
Córtex
Córtex
Córtex
30
40
50
30
40
50
C1
9,3667·10−5
1,3164·10−4
2,1637·10−4
5,8295·10−4
6,5195·10−4
6,7114·10−4
años
años
años
años
años
años
D
C3
214,96 0
152,94 0
93,06
0
34,54
0
30,88
0
30,00
0
179
C4
0
0
0
0
0
0
Tabla 5.10: Propiedades de material de núcleo y córtex. C1 y C3 en MPa; D en
M P a−1 ; C4 adimensional.
Para modelar el comportamiento de los tejidos del cristalino se ha utilizado un
modelo hiperelástico, neo-hookeano para la matriz isótropa, y basado en Holzapfel
and Gasser [2000] para la contribución de las fibras, cuya SEF es la siguiente:
Ψ̄ =
C1 ¯
C3
(I1 − 3) +
{exp[C4 (I¯4 − 1)2 ] − 1}
2
2C4
(5.16)
siendo los parámetros de material correspondientes a este modelo, C1 y D:
C1 =
E
4(1 + ν)
D=
6(1 − 2ν)
E
(5.17)
Los valores obtenidos de estos parámetros para núcleo y córtex a las edades de estudio se encuentran en la Tabla 5.10. Tanto el núcleo como el córtex se han supuesto
isótropos, hipótesis válida a priori para el núcleo, por la degradación y pérdida
de direccionalidad de las fibras, pero no para el córtex, en el que las fibras están
claramente orientadas (ver apartado 2.1). Sin embargo, al no encontrarse caracterizadas las propiedades de dichas fibras en bibliografı́a, se ha supuesto isotropı́a,
por lo que en ambos materiales C3 = C4 = 0. Aunque ambos tejidos tienen un
alto contenido en agua, es decir, pueden considerarse incompresibles, debe imponerse cuasi-incompresibilidad para evitar problemas computacionales, por lo que se
ha asignado un valor de 0,499 para el módulo de Poisson en todos los casos [Burd
et al., 2002].
Algunos autores han cuestionado los resultados de Fisher, afirmando que comete
errores sistemáticos en la determinación del módulo de Young de córtex y núcleo
[Weeber et al., 2005; Burd et al., 2006], llevándole a la conclusión de que el córtex
es más rı́gido que el núcleo. Sin embargo, los trabajos de Heys et al. [2004] y Weeber et al. [2007] concluyen que en personas jóvenes, el córtex es más rı́gido que el
núcleo, aumentando ambos su rigidez con la edad a distinto ratio y produciéndose
la inversión en torno a los 30 [Heys et al., 2004] o los 49 [Weeber et al., 2007] años,
cuando el núcleo comienza a hacerse mucho más rı́gido que el córtex. En las simulaciones que presentamos se ha utilizado el valor del módulo de Young estimado según
Fisher para la edad de 30 años, por lo que se puede considerar una aproximación
Modelado del ojo humano y tratamientos refractivos
180
(a)
(b)
Figura 5.26: (a) Gráfica tension vs deformación de tejido capsular de distintas
edades obtenida por Krag et al. [1997]. (b) Ajuste de las curvas de comportamiento
obtenidas por Krag et al. [1997] mediante el modelo hiperelástico de Holzapfel and
Gasser [2000].
válida. Para las edades más avanzadas (40 y 50 años), el valor estimado según
Fisher se utiliza únicamente como semilla para los cálculos iterativos realizados con
el objeto de determinar las propiedades de ambos tejidos a dichas edades.
Propiedades de material de la cápsula
El tejido de la cápsula del cristalino ha sido estudiado mediante ensayos de dos
tipos: tracción uniaxial e inflado. S. Krag y T.T. Andreassen realizaron ensayos de
tracción uniaxial con anillos de tejido de cápsula anterior y posterior humana, observando que ambos tejidos presentan un comportamiento en grandes deformaciones,
y que su rigidez aumenta con la edad hasta los 35 años, edad en la que se detiene
esta tendencia; además, la cápsula posterior es menos rı́gida que la anterior [Krag
et al., 1997; Krag and Andreassen, 2003a,b].
La Figura 5.26 (a) muestra las curvas de comportamiento obtenidas por Krag
et al. [1997] en los ensayos de tracción uniaxial de cápsula anterior humana. En la
Figura 5.26 (b) se muestra el ajuste de los parámetros de material según el modelo
hiperelástico neo-hookeano indicado anteriormente (expresión 5.16). El ajuste se ha
realizado para las edades de 39 y 65 años, obteniéndose valores muy similares de los
parámetros de material, que se muestran en la Tabla 5.11.
En los modelos de cristalino desarrollados en el Capı́tulo 7 se han asignado al
tejido capsular las propiedades de material obtenidas para 39 años (Tabla 5.11),
aplicada a los modelos de 30, 40 y 50 años, asumiendo las hipótesis de que el tejido
capsular anterior y posterior presentan las mismas propiedades de material, y que
éstas apenas varı́an en este rango de edades.
Humphrey [2002] y David et al. [2007] realizaron ensayos de inflado con tejido
Capı́tulo 5. Caracterización de las propiedades de material de los tejidos
39 años
65 años
C1
0.2160
0.2160
D
0.2835
0.2835
C3
0.0339
0.0387
181
C4
9.7406
8.6782
Tabla 5.11: Parámetros de material obtenidos mediante el ajuste de las curvas de
comportamiento obtenidas por Krag et al. [1997] para la cápsula anterior a las edades
de 39 y 65 años. C1 y C3 en MPa; D en M P a−1 ; C4 adimensional.
(a)
(b)
Figura 5.27: (a) Comportamiento de la cápsula anterior humana en el ensayo de
inflado [Pedrigi et al., 2007]. Las curvas de presión vs deformación de Green con
respecto a la configuración libre de cargas. Se representan las direcciones meridional
y circunferencial. (b) Modelado de la distribución de las fibras en el tejido capsular.
capsular de cerdo, en los cuales se observaba un comportamiento no lineal en grandes
deformaciones. Posteriormente, Pedrigi et al. [2007] realizaron los mismos ensayos
con tejido capsular humano. Tanto las curvas obtenidas de presión vs deformación,
que se muestran en la Figura 5.27 (a), como los parámetros estimados, muestran que
la dirección circunferencial presenta mayor rigidez que la meridional en el entorno
del ecuador, y menor al aproximarse hacia los polos.
Aunque el ensayo de inflado representa las condiciones fisiológicas mejor que el
de tracción, la dificultad de determinar los parámetros de material es mayor, pues
no existe una solución analı́tica para el modelo hiperelástico de Holzapfel. Mediante simulaciones con el modelo se han estimado dichos parámetros, pero difieren
significativamente de los obtenidos mediante el ensayo de tracción presentados anteriormente. Los resultados de Pedrigi et al. [2007] sirven de base en este trabajo para
el modelado de la cápsula, que se considera anisótropa con una dirección preferencial
de las fibras.
En esta tesis, no se ha considerado la viscoelasticidad para el modelado de los tejidos del cristalino, debido a la elevada desproporción entre las constantes de tiempo
de viscoelasticidad y el tiempo de carga de interés en este estudio. Se han analizado
los estados inicial y final de equilibrio, no el proceso desde una configuración a otra.
En conclusión, la cápsula anterior del cristalino humano muestra una anisotropı́a
182
Modelado del ojo humano y tratamientos refractivos
C1 (M P a)
Núcleo
9, 3667 · 10−5
Córtex
5, 8295 · 10−4
Cápsula
0,2160
D(M P a−1 ) C3 (M P a)
C4
214,96
0
0
34,54
0
0
0,2835
0,0339
9,7406
Tabla 5.12: Valores de los parámetros del modelo hiperelástico neo-hookeano para
núcleo y córtex [Fisher, 1971] y cápsula [Krag et al., 1997; Krag and Andreassen,
2003a] correspondientes al cristalino humano a la edad de 30 años.
fuertemente dependiente de la región [Pedrigi et al., 2007], por lo que parece que
un modelo constitutivo anisótropo no lineal es el que mejor representa su comportamiento. En este estudio se ha aplicado un modelo hiperelástico e isótropo para
núcleo y córtex, y transversalmente isótropo con una familia de fibras al tejido
capsular, según se muestra en la figura 5.27 (b). Además, el tejido se considera
cuasi-incompresible, como se muestra en el Capı́tulo 4, en el que se desarrolla el
modelo de comportamiento utilizado. Los valores de los parámetros C1 , D, C3 y C4
del tejido capsular se han tomado de los resultados experimentales obtenidos por
Krag et al. [1997]; Krag and Andreassen [2003a]. En la Tabla 6.2 se muestran los
parámetros asignados a los tres tejidos, núcleo, córtex y cápsula, para el modelo de
cristalino de edad 30 años.
5.6
Discusión y conclusiones
En este capı́tulo se han presentado ensayos en laboratorio para la determinación
del comportamiento de los tejidos corneal y escleral de las especies porcina y humana.
Se ha realizado el ajuste de los parámetros utilizando dos modelos i.e. Martins et al.
[2008] y Holzapfel and Gasser [2000].
En la Figura 5.28 (a) se muestran las curvas medias obtenidas para tejido corneal
de cerdo de 3 y 6 meses de edad, y de esclera de cerdo de 6 meses de edad. Como
se indicó en el apartado 5.1, se han utilizado dos grupos de estudio de ojos sanos:
los de individuos de 3 meses de edad y peso aproximado de 30 Kg, y los de 6 meses
de edad y peso aproximado de 150 Kg. Para establecer comparaciones entre los
comportamientos de los distintos tejidos, la Figura 5.28 (b) recoge los valores de
tensión de de Cauchy correspondientes a valores de alargamiento de 6%, 8%, 10% y
12%, tomados de las tres curvas.
Para una edad determinada (en este caso, 6 meses) el tejido escleral es más
rı́gido que el corneal. En concreto, para alargamientos del 6%, 8%, 10% y 12%
requiere valores de tensión de Cauchy superiores en un 74%, 68%, 59% y 54%,
respectivamente.
La córnea de cerdo joven (3 meses) se muestra más rı́gida que la de cerdo de
mayor edad (6 meses). En concreto, para alargamientos del 6%, 8%, 10% y 12%
Capı́tulo 5. Caracterización de las propiedades de material de los tejidos
183
7
CC 3 meses
CC 6 meses
EC 6 meses
6
σ (MPa)
5
4
3
λ
2
1
0
1
1.05
1.1
λ
(a)
1.15
1.2
1,06
1,08
1,10
1,12
CC 3m
0,50
1,02
2,01
3,30
σ(MPa)
CC 6m EC 6m
0,18
0,7
0,40
1,25
0,80
1,95
1,25
2,7
(b)
Figura 5.28: (a) Curvas medias tensión de Cauchy (MPa) vs alargamiento obtenidas
experimentalmente: tejido corneal de cerdo de 3 meses de edad (magenta), tejido
corneal de cerdo de 6 meses de edad (azul, lı́nea continua), tejido escleral de cerdo
(azul, lı́nea discontinua). (b) Valores de tensión de Cauchy, en MPa, correspondientes a distintos valores de alargamiento en las curvas experimentales medias.
requiere valores de tensión de Cauchy un 60% superiores (0,5 MPa, 1,02 MPa, 2,01
MPa y 3,3 MPa córnea de 3 meses, frente a 0,18 MPa, 0,4 MPa, 0,8 MPa y 1,25
MPa correspondientes a la córnea de 6 meses de edad).
La Figura 5.29 muestra las curvas medias experimentales obtenidas con tejido
corneal y escleral de cerdo junto con las curvas de tejidos de humano. La curva
correspondiente a esclera humana (lı́nea roja discontinua) es la media de las tres
que se presentaron en el apartado 5.2.2, mientras que la curva de tejido corneal
humano (lı́nea roja continua) corresponde a un único espécimen correspondiente a
la muestra CHT2 (79 años de edad) presentada en el apartado 5.2.3 como muestra
control (sin tratamiento). La conclusión más evidente es que, al igual que sucede
con los tejidos de especie porcina, la esclera humana es más rı́gida que la córnea.
Asimismo, se puede observar que la curva experimental del tejido corneal humano
de edad avanzada (79 años) se encuentra entre las dos curvas de córnea de cerdo,
correspondientes a la edades de 3 y 6 meses.
Según el trabajo presentado en este capı́tulo, el comportamiento de un tejido
obtenido experimentalmente puede ser ajustado, con mayor o menor precisión, por
distintos modelos matemáticos. La bondad del ajuste va ligada generalmente a
una mayor complejidad de la SEF y, consecuentemente, a un mayor número de
parámetros por determinar.
La Figura 5.30 muestra las curvas medias experimentales junto con las curvas
de comportamiento asignadas a córnea y esclera en las simulaciones presentadas en
el Capı́tulo 6. Puesto que la esclera se ha modelado como material isótropo, y en
Modelado del ojo humano y tratamientos refractivos
184
7
CC 3 meses
CC 6 meses
EC 6 meses
CH sana
EH media
6
σ (MPa)
5
4
3
λ
2
1,06
1,08
1,10
1,12
1
0
1
1.05
1.1
λ
1.15
1.2
σ(MPa)
CH EH
0,40 1,90
0,70 3,20
1,10 4,80
1,80 6,40
(b)
Figura 5.29: Curvas medias experimentales tensión de Cauchy, en MPa, vs
alargamiento, de tejidos corneal y escleral de cerdo y humano. Tejido corneal de
cerdo de 3 meses de edad (azul, lı́nea de puntos); tejido corneal de cerdo de 6 meses
de edad (azul, lı́nea continua); tejido escleral de cerdo (azul, lı́nea discontinua);
tejido corneal humano (rojo, lı́nea continua) y tejido escleral humano (rojo, lı́nea
discontinua).
7
6
σ (MPa)
5
4
CC 3 meses
CC 6 meses
EC 6 meses
CH sana
EH media
C Holzapfel
E Holzapfel
3
2
1
0
1
1.05
1.1
λ
1.15
1.2
Figura 5.30: Curvas medias experimentales tensión de Cauchy, en MPa, vs
alargamiento, de tejidos corneal y escleral de cerdo y humano, junto al ajuste de
el modelo de Holzapfel para córnea (negro, lı́nea continua) y esclera (negro, lı́nea
discontinua).
Capı́tulo 5. Caracterización de las propiedades de material de los tejidos
185
consecuencia, no se ha caracterizado los parámetros C3 a C6 correspondientes a las
direcciones de las fibras, la curva no presenta el “talón” caracterı́stico. La curva de
comportamiento de tejido corneal se obtiene mediante el ajuste por el modelo de
Holzapfel and Gasser [2000]. Se observa que, a partir de un valor determinado del
alargamiento aproximadamente el 14%, el material se rigidiza considerablemente,
presentando un comportamiento casi lineal. Como aproximación es más preciso el
modelo de Martins et al. [2008], pues logra ajustar la curva experimental completa
(Figuras 5.14, 5.17, 5.19, 5.20, 5.21). Sin embargo, conlleva una mayor complejidad,
pues deben estimarse un mayor número de parámetros. El modelo de Holzapfel and
Gasser [2000] es válido para reproducir las condiciones in vivo, pues en situaciones
patológicas llegan a alcanzar los 6×10−3 MPa (50 mmHg), muy por debajo del
tramo lineal del modelo. Por lo tanto, este modelo reproduce de forma correcta el
comportamiento de los tejidos en condiciones fisiológicas.
186
Modelado del ojo humano y tratamientos refractivos
Capı́tulo 6
Simulación numérica de
tratamientos refractivos
La cirugı́a refractiva tiene como objeto la corrección de defectos refractivos del
ojo basándose en la ley de refracción de Snell. Puesto que “la córnea no es un trozo
de plástico” [Roberts, 2000], es posible remodelar la morfologı́a corneal, induciendo
un cambio de su curvatura que modifica la potencia óptica y corrige el defecto
refractivo.
En este capı́tulo se presenta la simulación numérica de diversos tratamientos
refractivos que han sido expuestos en el Capı́tulo 3. Se comienza por describir
cómo se realiza el modelado biomecánico del globo ocular, presentando diversos
modelos cuya utilización depende de la aplicación concreta que se desee realizar. A
continuación, se estudia desde el punto de vista biomecánico diversos tratamientos
refractivos. En primer lugar, se realizan simulaciones de cirugı́a incisional para la
corrección del astigmatismo, reproduciendo un nomograma de incisiones relajantes
en córnea clara o arcuatas, que permite validar el modelo propuesto desde el punto
de vista de la corrección astigmática, ası́ como plantear una metodologı́a para el
análisis aberrométrico de los resultados postquirúrgicos obtenidos. Posteriormente
se utiliza el modelo, ya validado, para la simulación de diversas incisiones en el lı́mite
corneo-escleral o incisiones relajantes limbares, analizando sus efectos. Se realizan
también simulaciones de cirugı́a de ablación láser para corrección de la miopı́a, con
el fin de determinar si existe una influencia de la PIO del paciente en los resultados
refractivos de la cirugı́a.
Finalmente, se estudian los tratamientos utilizados hoy en dı́a para el queratocono, es decir, el implante de segmentos de anillos intraestromales y el tratamiento
de cross-linking del colágeno corneal, realizándose el estudio de ambos tratamientos
de forma individual y combinada, en el orden citado y en el inverso.
6.1
Modelado del ojo humano
El modelado del ojo humano, como el de cualquier órgano que sea objeto de
estudio, debe comenzar por determinar el objetivo y alcance de la simulación. De
187
188
Modelado del ojo humano y tratamientos refractivos
esta forma se establece el nivel de detalle tanto geométrico como de mallado, o de
cualquier otro aspecto que forme parte de la fase de desarrollo del modelo.
A la hora de abordar el modelado del globo ocular, o más concretamente, de la
córnea, se puede optar por dos estrategias: utilizar un modelo genérico, válido para
reproducir y extraer resultados de aplicación a toda la población, o bien, reproducir
un modelo personalizado, que permita estudiar el caso particular de un paciente
especı́fico.
En este apartado se exponen las dos estrategias. Se comienza por presentar diferentes modelos genéricos de córnea sana, basándose en diversas geometrı́as, desde la
más sencilla, la esfera, hasta una más compleja y real correspondiente a un elipsoide
de no revolución. Se presenta además, una metodologı́a para el modelado personalizado de la geometrı́a corneal. Para el desarrollo de los modelos de ojo utilizados en
las simulaciones de tratamientos refractivos de esta tesis se ha comenzado modelando
la córnea de forma aislada, según la superficie base de interés, y posteriormente se
han acoplado los elementos circundantes no refractivos (limbo, hemisferio anterior
escleral).
6.1.1
Modelado de la geometrı́a base
En este apartado se presentan los modelos de la capa externa del hemisferio anterior de globo ocular, compuesta por córnea, limbo y esclera, utilizados para las
diferentes simulaciones que han sido objeto de esta tesis. Para el desarrollo de los
distintos modelos de córnea utilizados posteriormente en las simulaciones, se han
utilizado aproximaciones de la geometrı́a corneal propuestas por distintos modelos ópticos, que han sido tomadas de Navarro et al. [2005]. Estas aproximaciones
geométricas se describen a continuación.
En el modelado de la córnea, la superficie anterior corneal se representa habitualmente como z = S(x, y), donde z es la sagita o elevación en la dirección del eje
de medida o queratométrico, idealmente alineado con el eje óptico en una medición
perfecta. Dicha superficie se expresa como la suma de dos términos, según indica la
expresión (6.1):
z ≡ S(x, y) = b(x, y) + r(x, y)
(6.1)
donde b(x,y) es la superficie base o regular, y r(x,y) es el residuo, que representa las
irregularidades locales y/o globales de la topografı́a con respecto al modelo de base
regular b(x,y).
Para representar la geometrı́a base pueden utilizarse diversos modelos, caracterizados por distintos parámetros. En todos los casos se pretende que el modelo
base sea capaz de capturar las caracterı́sticas esenciales de la córnea media, y al
mismo tiempo haga que los valores del residuo, es decir, las irregularidades, sean
mucho menores que la superficie base. De esta forma se logra que la superficie
base b(x,y) proporcione una buena descripción global de la topografı́a y, por lo
tanto, de las propiedades ópticas de la córnea. Como se verá en posteriormente, la
Capı́tulo 6. Simulación numérica de tratamientos refractivos
(a)
(c)
189
(b)
(d)
Figura 6.1: Algunas superficies cónicas utilizadas como base para el modelado de la
geometrı́a corneal. (a) Esfera. (b) Superficie tórica. (c) Elipsoide de revolución en
torno al eje z. (d) Elipsoide de no revolución con semiejes a, b, c.
descripción matemática y el ajuste del residuo se realizan, habitualmente, mediante
una expansión en polinomios de Zernike.
En los modelos de elementos finitos desarrollados se ha utilizado el modelado de
la geometrı́a corneal como superficie base, también denominada regular. La mayor
parte de estos modelos se deduce de la expresión de la bicónica (ecuación (6.2)):
z=
cx x2 + cy y 2
q
1 + 1 − (1 + Qx )c2x x2 − (1 + Qy )c2y y 2
(6.2)
En esta expresión, la ságita z se representa en función de cuatro parámetros: las
curvaturas horizontal y vertical (cx y cy , respectivamente) que se obtienen como la
inversa de los radios: cx = R1x y cy = R1y , y las dos constantes cónicas Qx y Qy . Los
Modelado del ojo humano y tratamientos refractivos
190
demás modelos se obtienen particularizando la expresión (6.2) a los distintos casos:
• Modelo esférico (Figura 6.1 (a)). En este caso, Rx = Ry = R. Las conicidades
son nulas, Qx = Qy = 0. La esfera base se denomina habitualmente BFS (Best
Fit Sphere) y es una aproximación muy utilizada por su sencillez.
• Cónica de revolución o elipse corneal (Figura 6.1 (c)). Se obtiene cuando los
parámetros son iguales en x e y: Rx = Ry = R y Qx = Qy = Q.
• Superficie tórica (Figura 6.1 (b)). La forma circular de esta superficie a lo
largo de los ejes x e y hace que las conicidades sean nulas: Qx = Qy = 0.
• Modelo bicónico. Es el más general, ya que no se imponen restricciones en
ninguno de sus cuatro parámetros. La ecuación (6.2) representa esta superficie, pero suponiendo que el eje astigmático (el de mayor curvatura, y por
tanto, mayor potencia óptica) esté situado a 0o o a 90o , no admitiendo otra
orientación. Schwiegerling and Snyder [1998] aplican una rotación a la superficie alrededor del eje, para determinar el eje de astigmatismo, aunque la
introducción de un quinto parámetro hace el modelo más complicado.
• Elipsoide de no revolución (Figura 6.1 (d)). Esta superficie, similar a la forma
de un melón, viene determinada por sus tres semiejes ortogonales a, b y c,
según la expresión:
x2 y 2 z 2
+ 2 + 2 =1
(6.3)
a2
b
c
La elipsoide de revolución es también un caso particular de la bicónica (ecuación
(6.2)) en el que las dos constantes de conicidad no son independientes, sino
2
que están relacionadas a través de los semiejes, según las relaciones: Rx = ac ,
2
2
2
Ry = bc , Qx = ac2 − 1 y Qy = cb2 − 1.
La elipsoide es menos general que la bicónica, por tener relacionados sus
parámetros entre sı́, pero tiene la gran ventaja de ser una superficie de segundo grado, mientras que la bicónica es de orden cuatro.
6.1.2
Modelos de elementos finitos
En esta tesis se han utilizado dos de las geometrı́as base presentadas anteriormente para el desarrollo del modelo de elementos finitos de la córnea: la geometrı́a
esférica y la elipsoide. Ambos modelos se describen a continuación.
Modelo de geometrı́a esférica
La córnea humana, como es bien conocido, no presenta geometrı́a esférica aún
en casos de emetropı́a. Es decir, siempre existe un cierto nivel de astigmatismo,
Capı́tulo 6. Simulación numérica de tratamientos refractivos
191
Figura 6.2: Modelo de elementos finitos de hemisferio anterior de globo ocular correspondiente a la geometrı́a de aproximación esférica para aplicación a cirugı́a incisional. Se compone de 12.928 elementos hexaédricos y 27.604 nodos siguiendo un
patrón de mallado radial y concéntrico.
normalmente con mayor radio de curvatura horizontal que vertical [Navarro et al.,
2006a]. Sin embargo, la geometrı́a esférica es razonablemente próxima a la elipsoide
real que presenta la córnea emétrope [Calossi, 2007] y en bibliografı́a el modelo de
aproximación esférica es utilizado de forma general mediante modelos axisimétricos
[Pinsky et al., 2005; Alastrué et al., 2006; Cabrera et al., 2006b; Pandolfi et al.,
2009; Gefen et al., 2009]. A continuación se presenta el desarrollo de un modelo
compuesto por córnea, limbo y esclera con aproximación a geometrı́a esférica, que
es utilizado posteriormente para la simulación de diversas cirugı́as refractivas.
A pesar de ser el modelo más sencillo, el modelo de geometrı́a esférica presenta
una gran ventaja en la simulación de la cirugı́a incisional para la corrección del
astigmatismo: permite simular todos los niveles correctivos de forma inversa, es decir, inducir un nivel de astigmatismo similar a la corrección que la misma técnica
quirúrgica provocarı́a en una córnea con ese nivel de astigmatismo previo. De esta
forma, el modelo esférico permite realizar un número ilimitado de simulaciones. Si
se realizara el proceso inverso, es decir, el de corrección de astigmatismo, el modelo
deberı́a presentar el grado de astigmatismo en cuestión, por lo que deberı́a crearse
un modelo geométrico distinto para cada variación de los parámetros de la cirugı́a
por analizar. Un razonamiento análogo puede realizarse respecto a la cirugı́a de
corrección de miopı́a por ablación láser, por lo que se utiliza el modelo de geometrı́a
esférica para el estudio mediante simulación numérica de esta técnica quirúrgica.
Todos los tejidos del modelo, córnea, limbo y esclera, se han modelado considerando geometrı́a de revolución. El modelo representa la mitad anterior de la
capa externa del globo ocular. Se ha asignado un radio anterior de 7,5 mm [Cabrera
Modelado del ojo humano y tratamientos refractivos
192
Figura 6.3: Representación bidimensional (izquierda) y tridimensional (derecha) de
las capas corneales de ablación utilizadas en el mallado del modelo. De la más
externa a la más interna, las capas representadas corresponden a la corrección de
niveles de miopı́a de 2D (cian), 4D (magenta), 6D (amarillo), 8D (naranja) y 10D
(rojo).
Corrección (D)
t0 (mm)
2
4
0,02387 0,04774
6
0,071618
8
0,09549
10
0,11936
Tabla 6.1: Valores de la profundidad de ablación t0 correspondientes la corrección
miópica de 2, 4, 6, 8 y 10 D; diámetro de ablación de 6 mm.
et al., 2006b] a la superficie anterior de la córnea, un diámetro de 12,0 mm [Pinsky
and Datye, 1991; Bryant and McDonnell, 1996], espesor axial 550 µm, y espesor en
la periferia corneal de 650 µm [Pinsky and Datye, 1991], resultando una superficie
posterior cónica con radio apical de 6,04 mm y conicidad Q de -1,35. El limbo
consiste en un anillo que rodea la córnea, cuyo diámetro interior es de 12,0 mm y el
exterior de 12,5 mm, y su espesor aumenta de 6,5 mm en el lı́mite corneal hasta 1
mm en el escleral. La geometrı́a de la esclera se considera de revolución, con radio
externo de 13 mm y 1 mm de espesor. El diseño de la geometrı́a y posterior mallado por elementos finitos se realizaron mediante los paquetes de software comercial
Cubit 10.1 [Sandia National Laboratories, 2006] e I-DEAS v.9 [Structural Dynamics
Research Corporation, 2001].
Para la simulación de cirugı́a incisional, el mallado se realiza según un patrón
radial y concéntrico, que permite simular incisiones de distinta longitud (grados de
arco), ası́ como reproducir incisiones con distancia variable respecto del eje óptico
(zona óptica). El modelo se compone de 12.928 elementos hexaédricos de 8 nodos
C3D8H y 27.604 nodos, y se muestra en la Figura 6.2. Al ser un modelo de revolución, el mallado de la zona central en todo el espesor corneal se compone de
elementos prismáticos de base triangular, C3D6H.
Para realizar un mallado del modelo adecuado para la simulación de cirugı́a
refractiva con láser excı́mer para la corrección de la miopı́a, debe estimarse en primer
lugar la profundidad de ablación correspondiente a cada nivel de corrección miópica.
En este estudio se ha estimado dicha profundidad de ablación mediante la expresión
(3.1) propuesta por Munnerlyn et al. [1988].
Capı́tulo 6. Simulación numérica de tratamientos refractivos
193
Se realiza la simulación numérica de cirugı́a refractiva mediante ablación láser
para la corrección de cinco niveles de miopı́a, de valores 2, 4, 6, 8 y 10 D. En este
estudio se toma un valor común de 6 mm para el diámetro de ablación S [Lombardo
et al., 2006; Ahn et al., 2009]. El valor obtenido mediante la expresión (3.1) para
la profundidad de ablación t0 correspondiente a cada caso de corrección miópica se
muestra en la Tabla 6.1. Estos valores se utilizan para generar el mallado del modelo
mediante capas de elementos en el tejido bajo la superficie anterior de la córnea que
serán eliminadas sucesivamente durante la simulación, en cada uno de los steps de
cálculo. Cada capa tiene una profundidad apical igual al valor de t0 estimado para
cada incremento de corrección de 2D. Es decir, para la corrección de 2D se eliminará
una capa de elementos, mientras que para la corrección de 10D, se eliminarán las
cinco capas establecidas en la malla.
Modelo de geometrı́a elipsoide
La superficie elipsoide de no revolución viene determinada en forma canónica por
los tres semiejes a, b y c correspondientes a las tres orientaciones cartesianas x, y,
z, siendo z el eje óptico, según la expresión (6.3), y su morfologı́a corresponde a la
Figura 6.1 (d). El modelo elipsoide es capaz de representar tanto la conicidad como
la toricidad de la cónica, es decir, puede reproducir el astigmatismo mediante las
diferentes curvaturas entre el meridiano de mayor poder refringente y su perpendicular.
Figura 6.4: La superficie base corneal se obtiene mediante un corte por un plano
coronal del extremo más prolato del elipsoide de no revolución, obteniéndose una
superficie de base elı́ptica cuyo eje mayor es igual al diámetro corneal (φcornea ). La
dirección del semieje mayor de dicha elipse ( φ2 ) se considera como eje x (horizontal).
De esta forma, la córnea presenta un ligero astigmatismo a favor de la regla. El eje
z define el eje óptico.
194
Modelado del ojo humano y tratamientos refractivos
Figura 6.5: Modelo de elementos finitos de hemisferio anterior de globo ocular correspondiente a la geometrı́a de aproximación elipsoide para aplicación a cirugı́a
incisional. Se compone de 34.552 elementos hexaédricos tipo C3D8H y de 43.783
nodos.
La córnea normal sana muestra un ligero astigmatismo. Generalmente, el eje de
mayor radio de curvatura es el horizontal (de ahı́ la denominación “a favor de la
regla”, según se ha expuesto en el Capı́tulo 2), siendo el semieje horizontal (nasaltemporal) mayor que el vertical (superior-inferior). La Figura 6.4 muestra la obtención de la superficie corneal a partir del elipsoide de no revolución. Al realizar
un corte del extremo más prolato del elipsoide por un plano coronal, se obtiene la
superficie corneal como un casquete elipsoidal de base elı́ptica, con semiejes a’, b’,
cuyo eje mayor es igual al diámetro mayor corneal (2a0 = φcornea ). La dirección del
) se considera como eje x (horizontal), es
semieje mayor de dicha elipse (a0 = φcornea
2
decir, la curvatura horizontal es menor que la vertical, de tal forma que la córnea
presenta un ligero astigmatismo a favor de la regla. El eje z define el eje óptico.
En el presente estudio, se asigna a los semiejes del elipsoide a, b y c valores de
10,43 mm, 10,27 mm y 14,26 mm, respectivamente, estimados por Navarro et al.
[2005] para una córnea sana promedio. Se ha tomado un valor para el diámetro
mayor corneal φcornea = 2a0 de 12 mm [Bryant and McDonnell, 1996] igual que el
tomado para el modelo esférico. El diámetro corneal en la dirección del eje y, 2b’,
es menor que el horizontal y viene determinado por la relación existente entre los
0
correspondientes semiejes del elipsoide completo a, b: ab0 = ab . La cara posterior
corneal se establece como una superficie cónica en la que, al igual que el modelo
esférico, el espesor apical se toma de 550 µm y el espesor en el lı́mite limbar es de
660 µm.
El modelo se utiliza en la simulación de incisiones arcuatas para la corrección
del astigmatismo, por lo que se ha creado un mallado según un patrón radial y
concéntrico similar al del modelo esférico, que consta de 34.552 elementos hexaédricos
tipo C3D8H y de 43.783 nodos (Figura 6.5). El modelo permite realizar el proceso
Capı́tulo 6. Simulación numérica de tratamientos refractivos
195
Figura 6.6: Medidas corneales de un paciente tomadas por el topógrafo Orbscan
(Bausch&Lomb). Las imágenes superiores son los mapas de elevación o topografı́as
de las superficies anterior (izquierda) y posterior (derecha); junto a cada una de ellas
se muestra el radio de la esfera de mejor ajuste (BFS). La imagen inferior derecha
muestra el mapa queratométrico, y la inferior derecha, la paquimetrı́a, estimación
del espesor corneal.
inverso, es decir, partir de una córnea esférica e inducir en ella un grado de astigmatismo determinado.
6.1.3
Modelo personalizado de córnea
En los apartados anteriores se han presentado diversos modelos para la realización
de simulaciones de tratamientos refractivos sobre córneas comunes para el estudio,
desde el punto de vista biomecánico, de dichos tratamientos. Sin embargo, una de las
aplicaciones más interesantes de la simulación numérica es, conocidos los efectos del
tratamiento en cuestión, elegir los parámetros más adecuados, o bien el tratamiento
más adecuado de entre varios propuestos, para un determinado paciente. Para ello
se requiere la reproducción fiel de la córnea del paciente, con las particularidades de
su caso concreto, que permita realizar simulaciones de las diversas posibilidades de
tratamiento que se planteen. Por ello, en este apartado se propone una metodologı́a
para el desarrollo de un modelo personalizado de la geometrı́a corneal.
El proceso comienza con la obtención, mediante topografı́a, de las superficies
de la córnea del paciente. Los topógrafos, descritos en el Capı́tulo 2, analizan la
superficie anterior corneal mediante la medida de elevación de miles de puntos en
196
Modelado del ojo humano y tratamientos refractivos
Figura 6.7: La imagen superior muestra la reproducción de la superficie posterior de
la córnea de un paciente a partir de las medidas tomadas por el topógrafo Orbscan de
Bausch&Lomb (caso presentado en la Figura 6.6). La imagen central representa la
esfera de mejor ajuste (BFS), cuyo radio es 7,35 mm, utilizada para la representación
topográfica de dicha superficie mediante el mapa de elevación posterior. La imagen
inferior es la representación de la elevación, mediante la diferencia de los puntos de
la superficie y la BFS, para su posterior adaptación al modelo biomecánico.
dicha superficie, y estiman el relieve de la superficie posterior. Los resultados se
muestran en forma de mapas de color, representando la elevación de las superficies
corneales anterior y posterior, el espesor corneal y la queratometrı́a. En esta tesis
se ha trabajado con el equipo Orbscan (Bausch&Lomb). La Figura 6.6 muestra
la información en forma de mapas de color que ofrece dicho aparato tras analizar
la superficie corneal de un paciente. Las dos imágenes superiores son los mapas
de elevación o topografı́as correspondientes a las superficies anterior (izquierda) y
posterior (derecha). La superficie base utilizada es la BFS, cuyo radio se muestra
junto a cada uno de los mapas de elevación. La imagen inferior derecha muestra el
mapa queratométrico, y la inferior derecha, la paquimetrı́a corneal.
A partir del mapa de elevación de la superficie corneal del paciente, se procede
a reproducir dicha superficie mediante un software implementado en MatLab (The
MathWorks, Inc.). Se genera una red bidimiensional de puntos equidistantes, similar
a la utilizada por el escáner del topógrafo. En el caso de Orbscan consiste en una
matriz de 101×101 puntos entre -5 y 5 mm centrados en el ápex en las direcciones
X e Y, a intervalos de ∆x=∆y=0,1 mm. A cada punto se le asigna una cota similar
a la elevación medida, que puede ser positiva o negativa según se encuentre por
encima o por debajo de la BFS.
La imagen superior de la Figura 6.7 muestra la superficie reproducida. La escala
Capı́tulo 6. Simulación numérica de tratamientos refractivos
197
Figura 6.8: Las superficies corneales del paciente tomadas por topografı́a se acoplan
al modelo numérico, reproduciendo la geometrı́a real corneal.
de color representa la cota o elevación de los puntos de dicha superficie respecto
a la BFS. La BFS utilizada para la estimación de la elevación en cada punto de
medida, cuyo radio indica el topógrafo (en este caso, 7,35 mm) se muestra en la
imagen central de la Figura 6.7. La imagen inferior de la Figura 6.7 muestra la
reproducción de la elevación, que es la diferencia respecto a la BFS (imagen central)
de la superficie corneal (imagen superior), es decir, el residuo como diferencia de
cotas entre la superficie corneal y la superficie base. Puede observarse que el patrón
de la imagen inferior, que es la diferencia de la medida de superficie respecto a la
BFS de radio 7,35 mm, coincide con el de la topografı́a del aparato (Figura 6.6
superior derecha), mostrando un área alargada y ligeramente excéntrica.
Finalmente, las elevaciones anterior y posterior obtenidas a partir de los mapas
topográficos se adaptan a las superficies correspondientes del modelo base seleccionado, bien el esférico (apartado 6.1.2) o bien, el más realista elipsoide de revolución (apartado 6.1.2), que es utilizado como “molde” para acoplar las superficies.
Este proceso se logra mediante la suma de la elevación (positiva, si está por encima
de la BFS o negativa si está por debajo) de cada uno de los puntos de la red de
medida, proyectados sobre las superficies anterior y posterior del modelo. Esta fase
se muestra de forma esquemática en la Figura 6.8.
Una vez obtenido el modelo personalizado, pueden realizarse las simulaciones
Modelado del ojo humano y tratamientos refractivos
198
del tratamiento o tratamientos que se barajen como opciones para el paciente en
cuestión.
6.2
Modelo constitutivo del material
En el Capı́tulo 5 se ha presentado una metodologı́a para la obtención de las
propiedades de material del tejido corneal y escleral mediante ensayos realizados
en laboratorio, utilizando dos modelos de comportamiento para el ajuste de los
parámetros correspondientes. Sin embargo, al no ser muestras de tejido humano,
en este capı́tulo se ha optado por utilizar valores de las propiedades de material de
córnea [Hoeltzel et al., 1992; Holzapfel and Gasser, 2001] y esclera humana [Buzard,
1992] tomados de bibliografı́a para las simulaciones de diversos tratamientos que se
realizan en este capı́tulo.
Los tejidos han sido ajustados utilizando el modelo de comportamiento propuesto
por Holzapfel [2000], siendo la función densidad de energı́a de deformación Ψ la
indicada por la expresión (6.4) (ver Capı́tulo 4):
C1 e
1
C3
Ln(J)2 +
(I1 − 3) +
exp{[C4 {(Ie4 − 1)2 ] − 1}+
2D
2
2C4
C3
exp{[C4 {(Ie6 − 1)2 ] − 1}
+
2C4
Ψ=
(6.4)
Los valores asignados a los parámetros C1 , C2 , D, C3 , C4 , C5 y C6 para los tres
tejidos considerados, córnea, limbo y esclera, se muestran en la Tabla 6.2.
Según se expone en el Capı́tulo 2, en el área central corneal se presentan dos
direcciones preferenciales: vertical (superior-inferior) y horizontal (nasal-temporal);
en el limbo o periferia corneal, las fibras se disponen de forma circunferencial; la
esclera puede considerarse isótropa. Las familias de fibras de colágeno m 0 y n 0
se han definido en el modelo mediante vectores unitarios en las direcciones de las
fibras estimados en los puntos de Gauss. Para definir dichos vectores se ha utilizado
un software implementado en MatLab (The MathWorks, Inc.), que calcula en cada
punto de integración de cada elemento del modelo las componentes de un vector
unitario en la dirección correspondiente. En los elementos de la córnea, para cada
elemento se definen dos vectores unitarios en cada punto de integración: uno, de
componentes en x y z, y otro, de componentes en y y en z, siendo z el eje óptico, que
representan las orientaciones nasal-temporal y superior-inferior, respectivamente.
Para el limbo se define una única familia de fibras, con componentes en x e y, y
componente z nula, de los vectores unitarios en cada punto de integración de cada
elemento, representando ası́ la dirección tangencial.
Las fibras se caracterizan por los parámetros C3 , C4 (primera familia, m 0 ) y C5 ,
C6 (segunda familia n 0 ). Como se ha indicado, el limbo sólo presenta una dirección
Capı́tulo 6. Simulación numérica de tratamientos refractivos
Córnea
Limbo
Esclera
C1 (M P a)
0,1
0,1
35
C2 (M P a)
0,0
0,0
-32
D(M P a−1 )
1 · 10−5
1 · 10−5
1 · 10−5
C3 (M P a)
0,234
0,234
0,0
C4
29,917
29,917
0,0
199
C5 (M P a)
0,234
0,0
0,0
C6
29,917
0,0
0,0
Tabla 6.2: Valores de los parámetros del modelo hiperelástico para los tejidos de
córnea, limbo y esclera [Hoeltzel et al., 1992; Buzard, 1992; Holzapfel and Gasser,
2001].
preferencial de las fibras, por lo que C5 = C6 = 0.
El modelo de material utilizado se encuentra implementado en una subrutina
de usuario de Abaqus [Hibbit et al., 2005]. La introducción de las propiedades de
material en el archivo de input para el cálculo por elementos finitos se ha realizado
de la siguiente forma:
*MATERIAL, NAME=DOSFFIBRAS
*USER MATERIAL,CONSTANTS= 32
1.0, 1e-5, 0.1, 0.0, 0.0, 0.0, 0.0, 0.2339985
29.9172, 0.2339985, 29.9172, 1.0, 0.0, 0.0, 0.0, 0.0
0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0
1.0, 1.0, 0.0, 0.0, 0.0, 0.0, 1.0, 0.0
*SOLID SECTION,ELSET=CORNEA,MATERIAL=DOSFFIBRAS
*MATERIAL, NAME=UNAFFIBRAS
*USER MATERIAL,CONSTANTS= 32
1.0, 1e-5, 0.1, 0.0, 0.0, 0.0, 0.0, 0.2339985
29.9172, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 0.0
0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0
1.0, 1.0, 0.0, 0.0, 0.0, 0.0, 1.0, 0.0
*SOLID SECTION,ELSET=LIMBO,MATERIAL=UNAFFIBRAS
*MATERIAL, NAME=SINFIBRAS
*USER MATERIAL, CONSTANTS=32
0.0, 1e-5, 35, -32, 0.0, 0.0, 0.0, 0.0
0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0
0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0
0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0
*SOLID SECTION,ELSET=ESCLERA,MATERIAL=SINFIBRAS
De esta manera se han definido los materiales DOSFFIBRAS, UNAFFIBRAS y
SINFIBRAS, en los cuales se consideran dos familias de fibras, una sola familia o
material no fibrado, asignándose a los tejidos de córnea, limbo y esclera, respectivamente.
200
Modelado del ojo humano y tratamientos refractivos
Figura 6.9: Izquierda: Distribución de tensiones iniciales (MPa) en el modelo, que
equilibra a una PIO de 15 mmHg. Derecha: Distribución de desplazamientos, en
milı́metros.
6.3
Condiciones iniciales y de contorno
Las condiciones fisiológicas reales se reproducen en el modelo antes de proceder
a la simulación de la cirugı́a. Para ello, se introduce una PIO de 15 mmHg, alcanzándose un estado tensional que equilibra ese valor de PIO. El proceso completo
se detalla en el apartado 4.4.1.
Las condiciones de contorno que se imponen al modelo son las siguientes: los
desplazamientos de los nodos que pertenecen al plano coronal medio del globo
únicamente están impedidos en dirección axial y tangencial, teniendo permitidos
únicamente los desplazamientos en dirección radial. Los nodos pertenecientes al eje
óptico, incluı́do el ápex corneal, tienen permitidos únicamente los desplazamientos
a lo largo del eje óptico (eje z en la Figura 6.10).
La presión intraocular (PIO) se aplica como carga uniformemente distribuida en
la superficie interior del modelo, el cual se ha recubierto interiormente de elementos membrana M3D4 de espesor 0,01 mm, que constituyen el grupo PRESION2D.
Dicha membrana se modela como un material muy blando, con módulo de Young
0,001 MPa y coeficiente de Poisson 0,4, transmitiendo ası́ toda la presión al elemento
hexaédrico sobre el que está definido el elemento membrana. La definición de material de dicha membrana en el archivo de input para el cálculo mediante Abaqus
[Hibbit et al., 2005] se realiza de la siguiente forma:
Capı́tulo 6. Simulación numérica de tratamientos refractivos
201
Figura 6.10: Condiciones de contorno impuestas al modelo. Bajo el efecto de la
presión intraocular, los nodos del plano coronal medio tienen permitidos únicamente
los desplazamientos en dirección radial; los nodos pertenecientes al eje óptico,
únicamente en la dirección axial (eje z ).
*MATERIAL, NAME=MEM
*ELASTIC, TYPE=ISOTROPIC
0.001, 0.4
*MEMBRANE SECTION, ELSET=PRESION2D, MATERIAL=MEM
0.01
y la aplicación de la PIO:
*DLOAD
PRESION2D, P, 2.33E-3
El valor de la PIO varı́a según el paciente y otras condiciones, como la hora
del dı́a. En las simulaciones se le asigna un valor de 15 mmHg (2,33×10−3 MPa),
valor medio en el rango considerado normal en condiciones fiológicas sanas (10-21
mmHg) y utilizado para la simulación numérica por diversos autores [Shin et al.,
1997; Deenadayalu et al., 2006; Cabrera et al., 2006a; Gefen et al., 2009].
6.4
Cirugı́a incisional I: Arcuatas
La cirugı́a incisional es una técnica para la corrección del astigmatismo que ha
sido presentada en el Capı́tulo 3. Aunque económica y sencilla, este tipo de cirugı́a
presenta el problema de la variabilidad de los resultados. Los nomogramas, en
202
Modelado del ojo humano y tratamientos refractivos
los que se recogen los parámetros incisionales recomendados para cada caso, están
basados en resultados estadı́sticos y no consideran todos los factores biomecánicos
que pueden influir en el resultado.
Es difı́cil obtener un nomograma adecuado que pueda ser utilizado como referencia universal para la obtención del equivalente esférico deseado y eliminación total
del astigmatismo [Cristóbal et al., 2006], debido a la variedad de factores que pueden
alterar el resultado y que no pueden ser considerados en los nomogramas. Una misma
cirugı́a con los mismos parámetros incisionales (longitud, zona óptica, profundidad,
etc) puede conducir a distintos resultados refractivos por haberse realizado sobre
otro paciente (en cuyo caso, las propiedades del tejido varı́an según su edad, sexo,
etc) o simplemente por la inexactitud de ser una técnica manual sujeta a ciertas
incertidumbres en su ejecución.
Por todo ello surge la necesidad de estudiar los parámetros incisionales recogidos
en los nomogramas y otros no considerados, como las propiedades de material del
tejido corneal, que pueden ser significativamente diferentes entre pacientes con un
mismo nivel de astigmatismo. Este estudio permitirá una planificación de la cirugı́a
refractiva incisional adaptada al paciente y que minimice la incertidumbre del resultado. Un estudio biomecánico previo a la cirugı́a serı́a muy conveniente para indicar
el efecto que cada parámetro y su error pueden tener sobre el resultado refractivo
final de forma objetiva e independiente del factor humano (paciente y cirujano).
Para las simulaciones de cirugı́a incisional se ha utilizado el modelo biomecánico de
córnea esférica.
6.4.1
Simulación de la cirugı́a
Las simulaciones de cirugı́a de arcuatas se realizan sobre el modelo de geometrı́a
esférica presentado en el apartado 6.1.2. Debido a la geometrı́a esférica, el modelo no
presenta astigmatismo previo a la cirugı́a. El astigmatismo inducido quirúrgicamente
no depende directamente del valor de astigmatismo de la córnea antes de la cirugı́a
incisional. Es decir, una incisión que, según el nomograma, corrija 2D de astigmatismo, será capaz de dejar emétrope a una córnea con ese nivel de astigmatismo, y
además, una córnea con 6D presentarı́a 4D si se le practicara la misma incisión. Por
lo tanto, en este estudio se considera que el nivel de astigmatismo provocado por
las incisiones simuladas es similar a la corrección que se lograrı́a en una córnea con
ese mismo grado de astigmatismo preoperatorio. Previamente a la simulación, se
reproducen en el modelo las condiciones fisiológicas según se muestra en el apartado
6.3.
Al no existir un eje de mayor curvatura, en el modelo se han realizado las incisiones según se muestra en la Figura 6.24, a 0o , es decir, centradas sobre el eje
horizontal (eje x ) que representa la dirección nasal-temporal; el eje vertical (eje y)
representa la dirección superior-inferior y el eje z coincide con eje óptico. Las inci-
Capı́tulo 6. Simulación numérica de tratamientos refractivos
203
Figura 6.11: Esquema representativo de incisiones curvas en córnea clara o arcuatas.
El cı́rculo negro central representa la pupila; el cı́rculo azul, la córnea; en blanco, la
esclera. Las incisiones mostradas tienen 90o de longitud de arco, zona óptica 6 mm,
realizadas a 0o (centrados en el eje x, dirección nasal-temporal); el eje y representa la
dirección superior-inferior; el eje z es el eje óptico. Izquierda: una incisión. Derecha:
dos incisiones enfrentadas.
siones de la Figura 6.24 son arcuatas de 90o de longitud posicionadas en una zona
óptica de 6 mm.
El cálculo ha sido realizado con Abaqus v6.5 [Hibbit et al., 2005]. El primer
step de cálculo consiste en la introducción de las tensiones iniciales en el modelo
mediante el tensor F 0 , previamente estimado en un proceso iterativo (ver apartado
6.3) y la aplicación de la PIO (15 mmHg) en su superficie interna, obteniendo ası́
las condiciones iniciales previas a la cirugı́a.
Los nodos situados en las interfaces donde se van a realizar las incisiones son duplicados inicialmente. Las superficies a las que pertenecen se definen como superficie
máster y superficie esclava, y permanecen unidas entre sı́ mediante un contacto rı́gido
durante el primer step. Para imponer el contacto se comienza por definir las superficies máster y esclava mediante las caras de los elementos que van a ser separados
al simular la apertura del tejido. Puesto que algunas simulaciones deben reproducir
incisiones enfrentadas, se definen dos conjuntos de superficies de contacto, a las que
se denomina MASTERW y SLAVEW, centradas en el eje de abscisas hacia valores
negativos, y MASTERE y SLAVEE, en el mismo eje pero en valores positivos. La
definición del contacto se realiza mediante las instrucciones:
*SURFACE INTERACTION, NAME=UNIDOSW
*FRICTION, ROUGH
*SURFACE BEHAVIOR, NO SEPARATION
*CONTACT PAIR, INTERACTION=UNIDOSW
SLAVEW, MASTERW
y de forma análoga:
204
Modelado del ojo humano y tratamientos refractivos
Radio a.c. (mm)
DI
DN I
D
1,5
46,6742
52,2665
5,5923
2
2,5
3
46,3530 45,9839 45,6027
52,0702 51,8242 51,5580
5,7172 5,8403 5,9553
Tabla 6.3: Influencia del área central (a.c.) considerada para el ajuste del radio de
curvatura, incisiones pareadas de 90o , en el astigmatismo inducido.
No incisiones
Longitud
D Simulación
D nomograma
% Error
1
45o
1,47
1,5
2,0
1
60o
2,13
2,25
5,3
2
45o
3
3
0,0
1
90o
2,72
3
9,3
2
60o
4,5
4,5
0,0
1
90o
5,95
6
0,8
Tabla 6.4: Cambio astigmático inducido en los 6 casos simulados, comparados con
el valor indicado por el nomograma de Lindstrom [Chu et al., 2005].
*SURFACE INTERACTION, NAME=UNIDOSE
*FRICTION, ROUGH
*SURFACE BEHAVIOR, NO SEPARATION
*CONTACT PAIR, INTERACTION=UNIDOSE
SLAVEE, MASTERE
En el siguiente step, y bajo la aplicación del mismo valor de PIO, se elimina el
contacto entre las superficies provocando la apertura del tejido, simulando de esta
forma la realización de la incisión. Para ello, se introducen los comandos:
*MODEL CHANGE, TYPE=CONTACT PAIR, REMOVE
SLAVEW, MASTERW
SLAVEE, MASTERE
Con el fin de evaluar la capacidad del modelo para reproducir las correcciones
astigmáticas producidas por la cirugı́a incisional, se han llevado a cabo simulaciones
de distintas incisiones en córnea clara o arcuatas indicadas por el nomograma de
Lindstrom [Chu et al., 2005] en una zona óptica de 6 mm y de una profundidad del
90% del espesor corneal (Figura 6.24). Las incisiones, al igual que en la cirugı́a, se
practican en un plano perpendicular a la superficie anterior corneal.
6.4.2
Cambio astigmático inducido: estimación
Tras la simulación de la cirugı́a incisional debe estimarse el cambio astigmático
inducido, en dioptrı́as. Los meridianos astigmáticos principales, que corresponden
a los de máxima y mı́nima curvatura y son ortogonales entre sı́, se utilizan para
calcular el astigmatismo de la córnea después de realizarse las incisiones. Se realiza
Capı́tulo 6. Simulación numérica de tratamientos refractivos
205
Figura 6.12: Distribución de desplazamientos (mm) en la córnea después de la simulación de las incisiones de profundidad 90%, longitud 45o (izquierda), 60o (centro)
y 90o (derecha).
un ajuste de la posición, en la configuración deformada, de los nodos que pertenecen
a la superficie anterior corneal y están dentro de una zona óptica de 6 mm (Figura
6.13). Se estiman dos radios de curvatura, uno para cada eje, y posteriormente
se utiliza la expresión de Munnerlyn et al. [1988] para el cálculo de las dioptrı́as
(ecuación (6.5)):
n−1
(6.5)
D∼
=
R
donde R es el radio de curvatura, en metros, a lo largo de cada uno de los meridianos
astigmáticos principales, es decir, el incidido y el ortogonal a él; y n es el ı́ndice de
refracción de la córnea, cuyo valor es 1,377.
Al utilizar esta expresión se ha considerado únicamente la contribución de la
superficie anterior corneal, por lo que la elección del valor del parámetro n no es
evidente. La córnea constituye una barrera protectora y un medio refringente de
separación entre el interior del ojo y su entorno. Su ı́ndice de refracción tiene un
valor de 1,377. El ı́ndice de refracción del aire es 1, y el del humor acuoso, 1,336.
La potencia óptica de la córnea se estima por la reflexión de la luz al atravesar las
superficies anterior y posterior de la córnea, que constituyen dos superficies de separación entre distintos medios refringentes, es decir, entre el aire y el tejido corneal
(superficie anterior) y entre el tejido corneal y el humor acuoso (superficie posterior).
Este cálculo puede simplificarse asumiendo que la córnea es una única superficie
refringente, con un ı́ndice de refracción equivalente de 1,3375, valor utilizado por los
queratómetros (ver apartado 2.3.1).
Dicho valor corresponde aproximadamente al ı́ndice de refracción del humor
acuoso [Munnerlyn et al., 1988], y mientras las dos superficies corneales modifiquen
206
Modelado del ojo humano y tratamientos refractivos
Figura 6.13: Nodos de la superficie anterior corneal según los ejes incidido (izquierda)
y su perpendicular (derecha), antes (o) y después (x) de la simulación de las incisiones.
su curvatura de forma solidaria, el ı́ndice del humor acuoso determina la potencia
óptica efectiva de la córnea. Sin embargo, si la superficie posterior de la córnea
permanece indeformada mientras se modifica la superficie anterior, debe considerarse el verdadero ı́ndice de refracción de la córnea, es decir, 1,377, por lo que se ha
considerado este valor que en el presente análisis [Munnerlyn et al., 1988].
El poder de refracción depende del diámetro de la zona central utilizada para el
ajuste del radio de curvatura R. Con el fin de observar la dependencia del resultado
de cambio astigmático con la zona de ajuste considerada, se han realizado variaciones
del tamaño de dicha zona entre 3 mm de diámetro, que corresponde al área más
pequeña estimada por los mapas queratométricos de equipos convencionales (algunos
de ellos expuestos en el Capı́tulo 2), hasta un diámetro de 6 mm, igual a la zona
óptica de las incisiones simuladas.
Cuanto mayor es el área de ajuste, más nodos se utilizan para estimar el radio de
curvatura, por lo que el ajuste deberı́a ser más preciso; sin embargo, al alejarse del
eje óptico se está considerando la contribución de nodos que no son tan influyentes
en la refracción como los que están más cerca de la pupila; el nivel óptimo de
compromiso entre estos dos aspectos no está claro a priori y debe ser analizado.
Como se muestra en la Tabla 6.3, el resultado depende significativamente del área
de ajuste. Para el caso simulado de dos incisiones enfrentadas de 90o de longitud, se
obtienen resultados de 5,5923 D y 5,9553 D estimados utilizando un radio de área
de ajuste de 1,5 mm y 3 mm, respectivamente. Esto supone una diferencia del 6%,
equivalente a 0,36 D. Cuanto mayor es el área considerada, más se asemejan los
resultados del modelo a los indicados por el nomograma [Chu et al., 2005]. Por lo
tanto, en adelante se utiliza un área central de 6 mm de diámetro para la estimación
de las dioptrı́as.
Los valores de cambio astigmático inducido por los distintos casos de cirugı́a
incisional simulados se muestran en la Tabla 6.4. Todas las incisiones se realizaron
en zona óptica de 6 mm y se utilizó ese mismo valor de diámetro para el área
central de estimación del radio de curvatura. Los resultados son similares a los del
nomograma de Lindstrom [Chu et al., 2005], obteniéndose errores del 2% o inferiores,
Capı́tulo 6. Simulación numérica de tratamientos refractivos
Casos
C 3 , C4
C3 × 2, C4
C3 /2, C4
C 3 , C4 × 2
C3 , C4 /2
C3
C4
0,234 29,917
0,468 29,917
0,117 29,917
0,234 59,834
0,234 14,9585
207
∆D
%∆D
6
4,5761 23,73%
7,1951 19,91%
5,9169 1,38%
5,9796 0,34%
Tabla 6.5: Cambio astigmático (∆D) inducido por dos arcuatas enfrentadas en zona
óptica de 6 mm, profundidad de 90% del espesor y longitud de arco 90o , considerando
las variaciones indicadas de los parámetros C3 y C4 .
excepto en los casos de una incisión de 60o (error de 5,3%) y una incisión de 90o
(9,3%).
6.4.3
Influencia de la rigidez del material
Con el fin de evaluar la influencia de las propiedades mecánicas del tejido corneal
en los resultados refractivos de la cirugı́a, se realizan simulaciones de incisiones
enfrentadas en zona óptica de 6 mm, longitud 90o de arco y profundidad de 90%
del espesor corneal, cuya corrección astigmática teórica según el nomograma de
Lindstrom es de 6 D, considerando la modificación de los valores de los parámetros
C3 , C4 , C5 y C6 , que representan la rigidez aportada por las fibras de colágeno.
Como se expone en el Capı́tulo 5, se toma C5 = C3 y C6 = C4 , asignando ası́ las
mismas propiedades a las dos familias de fibras correspondientes a las orientaciones
vertical y horizontal. Las variaciones introducidas consisten en aumentar un 100%
o disminuir un 50% cada uno de los dos parámetros citados, de forma aislada. En
la Figura 6.14 se observan las curvas de comportamiento correspondientes a cada
caso. Como es obvio, el parámetro C3 tiene una influencia significativamente mayor
que C4 , afectando directamente a la rigidez del material, mientras que C4 modifica
fundamentalmente la no-linealidad del comportamiento.
La Tabla 6.5 muestra los valores de los parámetros en los casos considerados,
y los resultados de cambio astigmático inducido correspondiente. Un aumento del
100% en el valor de C3 provoca una modificación de un 23% en el astigmatismo
inducido por las incisiones, mientras que su disminución en un 50% causa un 20%
de error en la corrección obtenida. Los resultados obtenidos en los dos casos de
variación de C4 son mucho más discretos. Un aumento en un 100% causa un cambio
del 1% en la corrección astigmática esperada.
De este análisis se concluye la variabilidad que puede aparecer en los resultados de
corrección de astigmatismo entre diferentes pacientes a pesar de realizarse incisiones
de las mismas caracterı́sticas, debido a que las propiedades del tejido corneal puede
presentar variaciones para cada paciente.
Modelado del ojo humano y tratamientos refractivos
208
Figura 6.14: Las curvas de color muestran el comportamiento de material corneal
obtenido mediante la variación de los parámetros C3 y C4 . La curva negra discontinua representa el caso considerado inicialmente, sin variación de dichos parámetros
(k1 = 0, 234 y k2 = 29, 917). Los casos considerados son: C3 × 2 (azul), C3 /2 (cian),
C4 × 2 (verde) y C4 /2 (magenta).
6.4.4
Resultados ópticos según el Método de Trazado de
Rayos
Modelo óptico
La simulación numérica por el método de elementos finitos proporciona el desplazamiento de los nodos pertenecientes a las superficies anterior y posterior de la
córnea, correspondientes al epitelio y endotelio, respectivamente. Todos los nodos
de las superficies anterior y posterior corneal que pertenezcan a la “zona óptica”,
área central de la córnea denominada ası́ por ser la que determina la óptica corneal,
se consideran para la estimación de la refracción de la córnea tras la simulación de la
cirugı́a. En el presente estudio, al igual que en el método anterior, se ha establecido
una zona óptica de 6 mm de diámetro.
El análisis óptico consiste en la construcción de un modelo óptico de la lente en
cuestión (en este caso, la córnea) reproduciendo su geometrı́a. Posteriormente se
realiza el trazado de rayos, en el que se observa y analiza la imagen formada por los
rayos que penetran en el sistema óptico modelado. Para configurar el modelo óptico
de córnea, se ajustan las topografı́as anterior y posterior con un modelo paramétrico
[Navarro et al., 2006a], que consiste en un elipsoide de no-revolución (ver apartado
6.1.2) más una expansión de polinomios de Zernike. La expansión polinomial de
Zernike, que en el presente análisis se considera hasta séptimo grado, permite la
Capı́tulo 6. Simulación numérica de tratamientos refractivos
209
representación de las irregularidades de la superficie corneal respecto a la forma
general de la elipsoide utilizada como superficie base.
La introducción de las aberraciones en el modelo mediante la expansión polinomial de Zernike es especialmente importante debido a que, según muestra la
experiencia clı́nica, la cirugı́a refractiva induce aberraciones de distinto grado relacionadas con las irregularidades y asimetrı́as corneales postquirúrgicas.
El software para el modelado óptico realizado en esta tesis fue implementado
en MatLab (The MathWorks, Inc.) por Navarro et al. [2009]. Los parámetros
correspondientes al ajuste del modelo son: los radios de curvatura a lo largo de los
meridianos horizontal (nasal-temporal) y vertical (superior-inferior), Rx y Ry , respectivamente; las constantes cónicas a lo largo de esos mismos meridianos, Qx y Qy ,
todos ellos correspondientes al modelo bicónico (ecuación (6.2)), y los coeficientes de
Zernike, que reproducen las irregularidades de las topografı́as respecto al elipsoide
definido por los cuatro parámetros anteriores. Valores significativamente altos de
los coeficientes de Zernike representan modos de deformación en la córnea tras la
cirugı́a que podrı́an causar considerables aberraciones de alto orden (HOA, High
Order Aberrations).
Análisis mediante trazado de rayos
Una vez obtenidos los parámetros del modelo óptico, estos parámetros son utilizados como entradas para el software de trazado de rayos Zemax (Zemax Development Corp.), que permite calcular el astigmatismo y las aberraciones de alto orden o
HOA. En el presente estudio, las HOA se expresan según los estándares del American
National Standards Institute.
En el astigmatismo, causado por la falta de simetrı́a de revolución, el foco no es
un punto, sino que se desdobla en dos segmentos focales separados por el denominado
intervalo de Sturm. La longitud del intervalo de Sturm es el valor del astigmatismo,
que puede medirse tanto en dioptrı́as como en milı́metros. En ojos normales, cada
dioptrı́a equivale a una longitud de 0,37 milı́metros a lo largo del eje óptico. Las dos
focales de Sturm, sagital y tangencial, son segmentos de luz perpendiculares entre
sı́ y cuya longitud es proporcional tanto al astigmatismo como al diámetro de la
pupila. El haz de luz, al irse propagando desde la focal sagital hacia el centro del
intervalo cuando el astigmatismo es positivo (al contrario si es negativo), pasa de
lineal a ovalado y se va haciendo más redondo hasta que en el centro del intervalo de
Sturm adopta una forma aproximadamente circular, denominada cı́rculo de mı́nima
confusión. A partir de ahı́ vuelve a ovalarse en la dirección perpendicular y se va
alargando hasta formar el segmento de la focal tangencial, que es perpendicular a la
sagital. El nombre “tangencial” se debe a que todos los rayos que pasan por un plano
paralelo al dibujo (rayos tangenciales) focalizan en un punto del segmento tangencial,
mientras que todos los rayos de un plano perpendicular al dibujo focalizan en un
punto de la focal sagital.
210
Modelado del ojo humano y tratamientos refractivos
Figura 6.15: Imagen superior: Modelo óptico de las superficies corneales anterior
y posterior. Los rayos inciden en la córnea y tras la refracción, convergen al foco.
Imagen inferior: Diagrama de impacto de los rayos en planos coronales a diferentes
distancias axiales.
Capı́tulo 6. Simulación numérica de tratamientos refractivos
211
La representación de la imagen óptica formada por la irradiación de un objeto
puntual brillante puede realizarse en forma de gráficos de la función de dispersión de
punto PSF (point spread function). Este tipo de representación permite enfocar distintos planos del intervalo de Sturm mediante la modificación del estado refractivo
del sistema óptico, utilizando lentes esféricas con valores de dioptrı́as determinados.
Un ojo emétrope esférico tendrı́a enfocado el cı́rculo de mı́nima confusión en su
retina. Dentro del intervalo de Sturm, la calidad de imagen se mantiene bastante
homogénea, aunque la diferencia entre los semiintervalos anterior y posterior, separados por el cı́rculo de mı́nima confusión, es la visión de los detalles horizontales y
verticales. La existencia del intervalo de Sturm supone un aumento de la profundidad de foco igual al valor del astigmatismo, que en combinación con la aberración
esférica y la aberración cromática, puede ayudar a paliar la presbicia. En general,
un aumento de profundidad de foco permite relajar los requisitos de enfoque y por
lo tanto, el esfuerzo acomodativo, cuando la tarea visual a desarrollar no es especialmente exigente. Sin embargo, el tener una mayor profundidad de foco supone un
importante coste en cuanto a calidad visual, que se traduce en un emborronamiento
de la imagen y produce pérdida de visión de los detalles en la dirección del eje de
astigmatismo, y es mayor cuanto mayor sea el diámetro de la pupila, siendo muy
perjudicial en visión nocturna (gran amplitud de pupila). En conclusión, el astigmatismo, al igual que el desenfoque y la aberración esférica, aumenta la profundidad
de foco a costa de disminuir la calidad óptica y por tanto, visual.
Para el cálculo del astigmatismo efectivo (no paraxial, sino con diámetro de
pupila de 6 mm) se ha minimizado el error cuadrático medio RMS de la amplitud
del diagrama de impacto en cada dimensión, tanto en horizontal (X) como en vertical (Y), siendo Z el eje óptico, obteniéndose el intervalo de Sturm en dioptrı́as. Se
supone que el astigmatismo es regular, a lo largo del eje horizontal o del vertical,
al igual que lo es en el modelo biomecánico. El trazado de rayos se muestra en la
Figura 6.15, en la que los rayos de luz atraviesan las curvaturas anterior y posterior
corneal, obteniéndose el llamado diagrama de impacto, que representa la dispersión
de los puntos provocados al impactar los rayos sobre planos verticales posicionados a distintas distancias axiales. De esta forma se puede obtener el intervalo de
Sturm, como la distancia axial entre los focos horizontal y vertical y por tanto, el
astigmatismo de esa córnea.
Para el estudio mediante trazado de rayos se debe establecer el valor de diámetro
de pupila, que representa el tamaño del área por la que penetran los rayos al modelo óptico. En el presente análisis se ha considerado una pupila de diámetro 6
mm. Además, se ha realizado un análisis paraxial como referencia para su comparación. En el ojo humano, la pupila aumenta su tamaño cuando el entorno está
poco iluminado (visión nocturna) y disminuye en entornos de alta iluminación, que
corresponderı́an a la hipótesis paraxial.
212
Modelado del ojo humano y tratamientos refractivos
Parámetros geométricos
Radio curvat.
Const. cónica
Astigmatismo inducido (D)
Aberración(µm)
Incisiones Rx (mm) Ry (mm) Qx
Qy
Nomograma Paraxial z.o. 6 mm Esférica Coma Tetrafoil RMS
Inicial
7.50
7.50
0.00
0.00
0.0
0
0
0.446
0.000
0.000
0.000
45o x1
7.59
7.40
-0.13 -0.096
1.5
1.30
1.43
0.370
-0.247 -0.810 -0.576
o
60 x1
7.64
7.33
-0.18 -0.083
2.5
1.96
2.31
0.350
-0.451 -1.240 -0.766
90o x1
7.76
7.32
-0.39 -0.129
3.0
2.65
3.27
0.251251 -0.730 -1.380 -0.474
45o x2
7.69
7.31
0.25 -0.210
3.0
2.53
2.81
0.297
0.000
0.000
-1.127
60o x2
7.83
7.23
-0.41 -0.280
4.5
3.64
4.41
0.206
0.039
0.362
-1.421
o
90 x2
8.03
7.16
-0.80 -0.290
6.0
5.01
6.44
0.070
0.000
0.000
-0.910
HOA
0.446
1.21
1.66
1.69
1.29
1.55
1.09
Tabla 6.6: Resultados de geometrı́a, astigmatismo inducido y HOA.
Figura 6.16: Topografı́as resultantes de la simulación de incisiones arcuatas (con
respecto a la esfera de referencia). El cı́rculo (izquierda) muestra la superficie corneal
completa (diámetro 12,0 mm) para el caso de dos incisiones enfrentadas de 60o de
longitud de arco. Los cuadros representan los 6 casos simulados. La escala de color
de la derecha corresponde al caso de incisiones pareadas de 90o .
Aberraciones inducidas por la cirugı́a
La Tabla 6.6 muestra los parámetros geométricos (radios de ajuste Rx , Ry y constantes cónicas Qx , Qy ), el astigmatismo inducido (∆D) y las aberraciones inducidas
(esférica, coma y trefoil; RMS y HOA), tras la simulación de las incisiones curvas
del nomograma de Lindstrom [Chu et al., 2005] de 6 mm de zona óptica. Los casos
presentados aquı́ son: una incisión simple o dos enfrentadas de longitudes de 45o ,
60o y 90o de arco.
Todos los datos recogidos en la Tabla 6.6 y en las Figuras 6.16 a 6.20 se calculan
para incisiones practicadas a 6 mm de zona óptica. La Figura 6.16 muestra los mapas
de elevación o topografı́as con respecto a la superficie esférica de mejor ajuste (BFS),
que en este caso es la superficie anterior, esférica, de la configuración indeformada.
Por tanto, el mapa representa los desplazamientos de los puntos de la superficie
corneal en direcciones paralelas al eje óptico, causados por la simulación de la cirugı́a
de arcuatas. La escala de color de la Figura 6.16 corresponde con el caso de incisiones
de 90o , con un desplazamiento máximo de aproximadamente 60,0 µm que se produce
en la zona de la incisión. Estos desplazamientos máximos son menores de 35,0 µm
y 50,0 µm para las incisiones de 45o y 60o , respectivamente, independientemente de
si la incisión es simple o pareada (Tabla 6.6 y Figura 6.16).
Capı́tulo 6. Simulación numérica de tratamientos refractivos
213
Figura 6.17: Radios de curvatura según los meridianos horizontal Rx y vertical Ry
(gráfica superior) y constantes cónicas Qx y Qy (gráfica inferior) de la superficie
anterior corneal para los 6 casos analizados. La lı́nea de puntos representa el valor
Q óptimo que consigue la mı́nima aberración óptica.
214
Modelado del ojo humano y tratamientos refractivos
Figura 6.18: Predicción de cambio astigmático según el modelo vs valor nominal
según el nomograma de Lindstrom [Chu et al., 2005]. Se muestran estimaciones
paraxiales, astigmatismo efectivo para 6 milı́metros de pupila y valores de referencia
según el nomograma (x=y).
Figura 6.19: Aberraciones de alto orden representadas como interferogramas de
bandas, para los 6 casos analizados. De izquierda a derecha: incisiones de 45o , 60o
y 90o de longitud de arco. Los interferogramas superiores e inferiores corresponden
a una sola incisión o dos pareadas, respectivamente.
Capı́tulo 6. Simulación numérica de tratamientos refractivos
215
Figura 6.20: Modos de aberración más significativos causados por la simulación de
la cirugı́a de arcuatas: aberración esférica, coma, trefoil, tetrafoil y RMS total.
El gráfico superior de la Figura 6.17 compara los radios de curvatura de la configuración corneal deformada tras la simulación de las incisiones, a lo largo de los
meridianos horizontal y vertical de la superficie anterior, Rx y Ry , respectivamente.
Como se puede esperar, la diferencia entre ellos (toricidad) aumenta con la longitud
de las incisiones y con el número de incisiones. El efecto óptico de esta diferencia
es el astigmatismo (Figura 6.18). El gráfico inferior de la Figura 6.17 muestra las
constantes cónicas resultantes correspondientes a los meridianos horizontal y vertical de la superficie anterior, Qx y Qy . Puesto que se utiliza un modelo inicial
esférico para realizar la simulación, ambos valores iniciales de conicidad son cero.
La cirugı́a incisional de arcuatas modifica las constantes cónicas en la zona óptica
haciendo que tomen valores más negativos, lo cual significa que la morfologı́a global
adopta la forma de una elipsoide de simetrı́a. La elipsoide se vuelve más prolata, es
decir, su constante cónica Q se hace más negativa, conforme aumenta el número y
longitud de las incisiones, lo que podrı́a tener un importante efecto en la aberración
esférica. La lı́nea de puntos de la Figura 6.17 inferior representa el valor teórico
óptimo de la constante óptica, Q=-0,528, que es el que logra minimizar el valor de
la aberración esférica [Atchison and Smith, 2000]. Como consecuencia, se observa
que las incisiones arcuatas disminuyen la aberración esférica de la córnea, o incluso
hipercorrigen en casos de altos niveles de astigmatismo. Otros modos de deformación mostrados en la Figura 6.16 se representan mediante coeficientes de Zernike
en el modelo de superficie. Más adelante se analiza su efecto sobre la calidad visual
resultante.
216
Modelado del ojo humano y tratamientos refractivos
En la superficie posterior de la córnea se producen cambios y deformaciones similares a los comentados para la superficie anterior. Estos datos no se incluyen
aquı́ para evitar la redundancia; sin embargo, tanto la superficies anterior como la
posterior han sido consideradas en el diseño del modelo óptico. Aunque la superficie
posterior corneal tiene un efecto menor en el comportamiento global de la córnea
(aproximadamente un 10%), este efecto no debe ser ignorado.
En la Figura 6.18 se muestra el cambio astigmático obtenido en los casos simulados por el modelo frente al valor nominal según el nomograma de Lindstrom [Chu
et al., 2005]. Para cada caso se calculan dos valores diferentes de astigmatismo:
(1) paraxial y (2) efectivo, para una pupila de 6 mm, igual a la zona óptica de
las incisiones. En presencia de aberraciones de alto orden, HOA, según las Figuras
6.19 y 6.20, el astigmatismo efectivo depende del diámetro de pupila. Por lo tanto,
estos dos valores de astigmatismo, (1) y (2), representan los dos casos extremos.
El astigmatismo paraxial corresponde a una pupila pequeña (aproximadamente 0,1
mm de diámetro), y el caso de 6 mm corresponde al astigmatismo efectivo calculado
para un diámetro de pupila igual a la zona óptica de las incisiones. Para valores
intermedios de diámetro de pupila, el astigmatismo tomarı́a valores entre las dos
lı́neas de la Figura 6.18.
Existe una coincidencia bastante precisa entre los resultados de astigmatismo
efectivo obtenidos por simulación numérica y los indicados por el nomograma estimados para una pupila de 6,0 mm. Sin embargo, los valores paraxiales reflejan
una cierta infracorrección. Puesto que la aproximación paraxial es muy grosera para
córneas tras la cirugı́a, los valores estimados según la hipótesis paraxial son poco
realistas. Tamaños de pupila comunes, de 3,0 a 4,0 mm, tendrı́an valores inferiores
pero más próximos al caso de 6,0 mm. En la Figura 6.18 se observa que las gráficas
de predicción astigmática frente al valor nominal no son lineales, especialmente para
un diámetro de pupila de 6,0 mm. La pendiente muestra una tendencia a aumentar
con el nivel de astigmatismo inducido, pasando de la infracorrección en los casos que
requieren una baja corrección astigmática, a la hipercorrección en casos de más de
5 D.
Además, el modelo predice valores ligeramente distintos para el astigmatismo inducido en el caso de corrección de 3 D cuando se realizan dos incisiones enfrentadas
en lugar de una incisión aislada (punto doble en la gráfica), incluso aunque la longitud de las incisiones fuera la misma. Dos incisiones de 45o dan lugar a cierta
infracorrección (-0,19 D), mientras que una sencilla de 90o produce hipercorrección
(+0,27 D).
Las aberraciones de alto orden o HOA resultantes de los casos de simulación se
muestran en las Figuras 6.19 y 6.20 y en la Tabla 6.6. La Figura 6.19 muestra los
frentes de onda representados mediante interferogramas para los 6 casos analizados.
Se observa un elevado número de bandas, que indica la presencia de altos valores
de HOA con valores pico-valle de diversas longitudes de onda. Los interferogramas
superiores, correspondientes a una sola incisión, muestran falta de simetrı́a y ten-
Capı́tulo 6. Simulación numérica de tratamientos refractivos
217
dencia a formar un patrón triangular, por lo que las aberraciones predominantes son
coma y trefoil.
Los interferogramas inferiores, correspondientes a dos incisiones enfrentadas, son
mucho más simétricos y muestran cuatro lóbulos, caracterı́sticos de la aberración de
tetrafoil. En este caso, los valores de coma y trefoil son inferiores. La cantidad
total de HOA no parece diferir mucho entre los 6 casos analizados. Sin embargo,
existe una diferencia significativa entre los resultados de una sola incisión y lo de
dos incisiones enfrentadas. Con dos incisiones (interferogramas inferiores), la calidad
óptica en la zona central de 3,00 a 4,00 mm de diámetro parece buena, con un bajo
número de bandas, y la mayorı́a de las bandas tiende a concentrarse en la periferia.
Además, la calidad parece mejorar con la longitud de las incisiones, siendo el caso
de longitud 90o el que presenta una mayor zona central libre de aberraciones.
Los valores numéricos de los modos de aberración más significativos y el valor
total RMS se muestran como diagrama de barras en la Figura 6.20. La córnea inicial,
antes de las incisiones, es esférica y por tanto muestra únicamente aberraciones
esféricas (Figura 6.20). Como verificación, se observa que el RMS global (barra
negra) es similar a la aberración esférica (barra blanca). Tras una incisión sencilla,
aparece coma negativo, trefoil y tetrafoil. Estas aberraciones generadas por una
sola incisión tienden a incrementarse al aumentar la longitud de corte. Para el
caso de dos incisiones enfrentadas, sin embargo, el tetrafoil negativo es claramente
predominante. El RMS total es inferior que en el caso de una sola incisión, y el
RMS no aumenta con la longitud de corte. Las incisiones de mayor longitud logran
una cantidad menor de HOA, como indica el interferograma inferior derecho de la
Figura 6.19.
En conclusión, las incisiones arcuatas parecen inducir una cantidad importante
de HOA. El RMS total aumenta sustancialmente y varı́a dependiendo del número
de incisiones y de su longitud, pero este cambio no es monotónico con las dioptrı́as
de astigmatismo corregido. Los modos de aberración cambian con el número de incisiones. Coma y trefoil son predominantes en el caso de una sola incisión, mientras
que tetrafoil está presente en todos los casos, pero es mayor si se realizan dos incisiones enfrentadas. La aberración esférica parece disminuir, como se podrı́a esperar
al observar los valores negativos de las constantes cónicas de la superficie corneal
(Figura 6.20).
6.4.5
Resultados en tensiones
El modelo numérico ofrece resultados adicionales al clı́nico para interpretar los
resultados de la cirugı́a. Las tensiones generadas por las incisiones en el tejido
corneal deben analizarse en cuanto a magnitud y patrones de distribución. En la
Figura 6.21 se muestra la distribución de tensión principal máxima para incisiones
pareadas de longitud 45o , 60o y 90o . Es evidente que, a mayor longitud de incisión,
mayor es la tensión máxima que se produce en la córnea, pudiendo dar lugar a daño
218
Modelado del ojo humano y tratamientos refractivos
Figura 6.21: Tensión principal máxima (MPa). Incisiones enfrentadas de profundidad 90% del espesor corneal, y longitudes de arco 45o izquierda), 60o (centro) y 90o
(derecha).
Figura 6.22: Dos posibilidades según el nomograma [Chu et al., 2005] para corregir
3 D de astigmatismo: incisiones enfrentadas de longitud de arco 45o frente a una
sencilla de 90o . Izquierda: tensión principal máxima (MPa). Derecha: distribución
de deformación principal máxima.
Capı́tulo 6. Simulación numérica de tratamientos refractivos
(a)
219
(b)
Figura 6.23: Mapas queratométricos del modelo tras la simulación de incisiones
arcuatas, profundidad del 90% del espesor corneal, zona óptica 6 mm. (a) Dos
incisiones de 45o . (b) Una incisión de 90o . La escala de color muestra la variación
queratométrica entre 0 D (colores frı́os) y 65 D (colores calientes) utilizada para la
representación en cada punto.
en el tejido corneal.
Un ejemplo de la utilidad de este modelo se presenta a continuación. Para conseguir un cambio astigmático de 3 D, según el nomograma de Lindstrom [Chu et al.,
2005] existen dos opciones: dos incisiones enfrentadas de 45o de longitud de arco, o
una sencilla de 90o . En la Figura 6.22 se muestra la distribución de tensión principal máxima y de deformaciones para cada caso. El valor máximo de la tensión
principal máxima en el caso de una sola incisión de 90o es 4,64×10−2 MPa, un 44%
superior que el valor máximo para dos incisiones de 45o , cuyo valor es 3,26×10−2
MPa. Esto significa que el tejido puede sufrir mayor daño y como consecuencia,
tardar más tiempo en cicatrizar. Por otra parte, es interesante observar el mapa de
contorno de deformación principal máxima. El cirujano probablemente elegirı́a la
opción de realizar dos incisiones a 45o , puesto que la queratometrı́a tras la cirugı́a
serı́a más uniforme que en el caso de realizar un solo corte de doble longitud. Parece
que pueda existir una correlación entre la distribución de deformaciones y el mapa
queratométrico posterior a la cirugı́a. La Figura 6.22 (derecha) muestra distribuciones más o menos concéntricas a los bordes de las incisiones, para ambos casos
(una incisión de 90o e incisiones pareadas de 45o ).
La Figura 6.23 muestra los mapas queratométricos representados a partir de la
geometrı́a deformada de la simulación de (a) dos incisiones enfrentadas de 45o y
(b) una incisión de 90o . Dichos mapas han sido obtenidos mediante un software
implementado en Matlab (The MathWorks, Inc.) en el cual se estima el radio de
curvatura Ri de cada nodo i de la superficie anterior del modelo, tras la simulación
de la cirugı́a, estimándose el valor queratométrico, en dioptrı́as, según la expresión
Modelado del ojo humano y tratamientos refractivos
220
. El mapa se grafica utilizando una escala de color en la que los colores
Di = 1,377−1
Ri
calientes representan valores elevados, y los frı́os, valores pequeños. En ambos casos
de simulación se puede apreciar un cambio en la intensidad de la tonalidad azul de
la periferia a la zona central corneal, que representa un incremento de unas 6 D
(entre 15 y 21 D, aproximadamente, en la escala de color mostrada). Se observa una
analogı́a entre la distribución de tensión máxima principal mostrada en la Figura
6.21 y la queratometrı́a, siendo los valores máximos en ambos casos los correspondientes a la posición de las incisiones, y disminuyendo de forma gradual en el área
circundante.
El análisis mediante trazado de rayos predice valores ligeramente distintos para
el astigmatismo inducido por ambos casos. Dos incisiones de 45o dan lugar a cierta
infracorrección (-0,19 D), mientras que una sencilla de 90o produce hipercorrección
(+0,27 D), como muestra la Figura 6.18. Este resultado indica que el desdoblamiento
de una incisión larga en dos más cortas provoca una respuesta mecánica diferente: la
distribución de tensiones y deformaciones que se obtiene al practicar dos incisiones
enfrentadas es diferente a la resultante de una sola incisión de mayor longitud. Como
resultado, el astigmatismo inducido es menor.
6.4.6
Discusión
Se ha realizado un análisis mediante el método de elementos finitos de incisiones
relajantes curvas en córnea clara o arcuatas para la corrección de distintos niveles
de astigmatismo, reproduciendo algunos de los casos recogidos en el nomograma de
Lindstrom [Chu et al., 2005]. La potencia óptica después de la simulación de las
incisiones se ha estimado, en una primera aproximación, considerando únicamente
la superficie anterior corneal mediante una expresión sencilla (ecuación (6.5)), pero
capaz de proporcionar resultados realistas del cambio astigmático inducido y de
poner en consideración la validación del modelo. Posteriormente se ha realizado
un análisis de la refracción postquirúrgica mediante el método del trazado de rayos,
construyendo un modelo óptico a partir de la geometrı́a deformada de las superficies
corneales anterior y posterior, resultantes de la simulación numérica de la cirugı́a.
Los resultados obtenidos por simulación numérica de las incisiones coinciden con
los indicados por los casos del nomograma de Lindstrom [Chu et al., 2005] reproducidos, por lo que se puede considerar el modelo validado para realizar simulaciones de
cirugı́a refractiva incisional, al menos como una primera aproximación.
Se han realizado algunas simplificaciones en el modelado y simulación del ojo
humano. La simulación mediante el MEF considera la presión fisiológica que actúa
en el interior del globo ocular, PIO, pero se han despreciado otras acciones presentes
en el estado fisiológico, como son la gravedad y la acción de los músculos, cuya
influencia en este estudio refractivo se puede considerar irrelevante. Como se ha
comentado anteriormente, se ha realizado la hipótesis de asumir esfericidad de la
superficie corneal antes de la cirugı́a, siendo 0 D su nivel de astigmatismo.
Capı́tulo 6. Simulación numérica de tratamientos refractivos
221
Según indica la evidencia clı́nica, la modificación de la curvatura corneal mediante cualquier técnica de cirugı́a refractiva (incisional, ablación laser) no depende
de la curvatura preoperatoria, dado que en la planificación de la cirugı́a ésta no
es considerada, y los parámetros son estimados según el nivel de defecto refractivo
a corregir. Esto indica que el astigmatismo inducido quirúrgicamente no depende
directamente del valor de astigmatismo de la córnea antes de la cirugı́a incisional, lo
que justifica la hipótesis de partida utilizada en este estudio. El modelo esférico, en
el que todos los meridianos tienen la misma curvatura, no presenta astigmatismo.
Por ello se considera que el cambio astigmático inducido coincide con la corrección
que se producirı́a en una córnea astigmática, pues su valor es independiente de las
curvaturas iniciales de ambos meridianos, el incidido y el ortogonal a él.
Esta simplificación tiene como consecuencia que la simulación realizada reproduce el proceso inverso al real, es decir, se ha provocado astigmatismo en lugar de
corregir un astigmatismo preoperatorio. La independencia de los resultados respecto a las curvaturas preoperatorias puede ser especialmente relevante en casos de
córneas con alto grado de astigmatismo, como las que han sido intervenidas mediante
queratoplastia penetrante (PKP), siendo buenas candidatas a la cirugı́a incisional.
Para estimar la validez de las simplificaciones geométricas, se ha realizado una
simulación con un modelo más realista de geometrı́a corneal elipsoide. El modelo
elipsoide utilizado se ha presentado en el apartado 6.1.2. Se ha realizado la simulación de dos arcuatas enfrentadas de 90o de longitud de arco, 6 mm de zona óptica y
profundidad del 90% del espesor. El astigmatismo resultante fue 4.8 D paraxial y 6.3
D efectivo para un diámetro de pupila de 6 mm., resultados ligeramente inferiores
a los obtenidos para la esfera (5,0 D y 6,44 D, respectivamente). Estas pequeñas
diferencias (de 0,20 D o inferiores) sugieren que las predicciones realizadas utilizando
el modelo esférico no cambian significativamente respecto a considerar modelos más
aproximados a la geometrı́a corneal real. Además, en la práctica clı́nica se obtienen
diferencias superiores entre el valor esperado y el inducido, probablemente debidas
a la superposición de incertidumbres debidas a distintas causas: el factor cirujano,
las diferentes caracterı́sticas morfológicas de cada córnea (topografı́a, paquimetrı́a)
o bien, un comportamiento biomecánico diferente del tejido corneal entre los distintos pacientes. El acuerdo entre el astigmatismo efectivo obtenido por simulación
numérica y el indicado por el nomograma de Lindstrom [Chu et al., 2005] sugiere que
esta metodologı́a puede ser utilizada en la predicción de los resultados de la cirugı́a
incisional, incluso en el diseño de nuevos nomogramas, con independencia de las
caracterı́sticas del paciente o del cirujano. Por ejemplo, el modelo podrı́a aplicarse
al desarrollo de un nomograma de cirugı́a incisional de arcuatas realizadas con láser
de femtosegundo. Otra aplicación directa del modelo optomecánico podrı́a ser el estudio de los efectos de otro tipo de incisiones, como las incisiones relajantes limbares
que se analizan en el siguiente apartado, o diferentes incisiones perforantes para la
cirugı́a de catarata, cuyo efecto astigmático debe ser considerado en la planificación
de la cirugı́a.
222
Modelado del ojo humano y tratamientos refractivos
Las simulaciones mecánica y óptica se realizan de forma secuencial. El modelo
de elementos finitos predice la nueva geometrı́a de la córnea y, con dicha geometrı́a,
el modelo óptico determina el cambio astigmático entre el estado inicial y el final.
No se considera el comportamiento viscoelástico, los estados de transición entre el
inicial y el final no han sido representados y los resultados corresponden únicamente
al estado final en equilibrio. El modelo optomecánico no tiene en cuenta los procesos
de curado o los cambios a nivel celular que se producen en el entorno de la incisión.
Por tanto, nuestros resultados sugieren que la mayorı́a de los efectos observados de
las incisiones, en cuanto a los resultados refractivos, podrı́an explicarse únicamente
por la respuesta elástica del material corneal.
Las simulaciones de cirugı́a incisional mediante elementos finitos predicen cambios en la topografı́a con desplazamientos axiales máximos entre 35,0 µm y 60,0 µm,
dependiendo de la longitud de las incisiones. Estos desplazamientos disminuyen en
puntos alejados de la incisión, y provocan la deformación de la superficie corneal. El
meridiano incidido se aplana y el perpendicular a él aumenta su curvatura, causando
un cambio cilı́ndrico (astigmatismo) y, si el factor de acoplamiento no se mantiene
1/1, se induce además un cambio esférico (miopı́a o hipermetropı́a). Sin embargo,
la distribución de deformaciones en la superficie corneal ofrece una respuesta más
compleja que la diferencia de curvaturas entre ambos meridianos (el incidido y su ortogonal), y este hecho podrı́a tener un fuerte impacto en la calidad óptica resultante
tras la cirugı́a, causando aberraciones que se estiman mediante el análisis óptico.
El análisis de las topografı́as resultantes tras las incisiones muestra cambios en la
toricidad corneal, que es el objetivo de las incisiones relajantes, es decir, modificar
curvaturas perpendiculares entre sı́. Sin embargo, la cirugı́a induce otras deformaciones en la superficie corneal que tienen repercusión en su comportamiento óptico.
La zona óptica se hace más prolata, es decir, adopta valores de la constante cónica
Q más negativos. Dependiendo de la simetrı́a (según se practique un solo corte o
dos enfrentados), los modos de deformación causan HOA de simetrı́a extraña (coma
y trefoil) o casi simétricas (tetrafoil). Otros estudios recientes [Guirao et al., 2004;
Pesudovs et al., 2005; Marcos et al., 2007] concluyen que el uso de incisiones perforantes para la cirugı́a de catarata de longitud 3,2 mm en el área superior inducen
este tipo de aberraciones.
El aumento del valor global postquirúrgico de HOA es importante. El valor
del error de frente de onda RMS para zona óptica de diámetro 6 mm siempre es
mayor de 1,0 mm (en el rango de 1,09 a 1,69 mm). Comparado con valores de una
córnea normal, las arcuatas aumentarı́an las HOA corneales en un factor entre 2 y
3. Este aumento es similar al que se induce, según se ha observado clı́nicamente, en
otros tipos de cirugı́a refractiva como laser in situ keratomileusis (LASIK) [MorenoBarriuso et al., 2001]. Aunque el valor total de las HOA inducidas puede ser similar
en cirugı́a incisional que en LASIK, la naturaleza de las deformaciones inducidas es
totalmente diferente, y por tanto los modos de deformación también lo son. Por
ejemplo, se sabe que la técnica LASIK incrementa la aberración esférica y el coma,
Capı́tulo 6. Simulación numérica de tratamientos refractivos
223
mientras que trefoil y tetrafoil parecen estar asociadas a las incisiones periféricas.
Nuestro modelo optomecánico indica que las incisiones arcuatas inducen un cambio astigmático (aberraciones de bajo orden) e incrementan notablemente las HOA.
La estimación paraxial proporciona menores valores de corrección debido a la presencia de HOA. Es un efecto bien conocido que coincide con resultados de otros estudios
previos, y esto conduce una importante conclusión: la aproximación paraxial es demasiado grosera para calcular la potencia óptica en ojos reales. En otras palabras,
en ojos postquirúrgicos en los cuales las HOA pueden ser significativamente más
altas, la aproximación paraxial puede proporcionar predicciones erróneas. El diseño
de modelos mediante diversos métodos numéricos de simulación (elementos finitos,
trazado de rayos) son herramientas esenciales que pueden ser aplicados como alternativas a los nomogramas (basados en resultados estadı́sticos) para realizar análisis
realistas, capaces de predecir resultados tanto de astigmatismo como de HOA.
Además de proporcionar información muy útil para la planificación quirúrgica,
los modelos realistas pueden ser particularizados mediante la incorporación de los
datos tomados del paciente [Navarro et al., 2006b]. La cirugı́a incisional es una candidata especialmente interesante para el modelado y simulación numérica, porque
en la realidad los resultados son altamente dependientes del factor humano (caracterı́sticas del paciente, experiencia y factor humano del cirujano), ofreciendo resultados menos predecibles que otras técnicas, como LASIK. En este contexto, deberán
realizarse trabajos futuros para establecer el papel de variables como la topografı́a,
la paquimetrı́a o la PIO, e incrementar el nivel de personalización del modelo.
6.5
6.5.1
Cirugı́a incisional II. Incisiones relajantes limbares
Introducción
A continuación se presenta un estudio de la cirugı́a incisional para corrección
del astigmatismo practicada en el lı́mite corneo-escleral, comúnmente denominado
limbo. Se utiliza el mismo modelo biomecánico de geometrı́a esférica presentado
en el apartado 6.1.2, que ya ha sido utilizado anteriormente para la simulación de
cirugı́a de arcuatas.
En el apartado anterior se ha realizado la validación del modelo, mediante la
reproducción de un nomograma utilizado universalmente, el nomograma de Lindstrom [Chu et al., 2005]. En este apartado se presenta una aplicación de dicho modelo para el estudio de la influencia de cada parámetro caracterı́stico de la cirugı́a
incisional, ası́ como su uso para casos no reproducidos especı́ficamente. El objetivo de este apartado es el estudio, mediante simulación numérica, del efecto de
algunos parámetros considerados en los nomogramas de incisiones relajantes, tanto
limbares como queratotomı́as arcuatas no penetrantes, que se asocian generalmente
224
Modelado del ojo humano y tratamientos refractivos
Figura 6.24: Esquema representativo de incisiones limbares para corrección de astigmatismo. El cı́rculo negro central representa la pupila; el cı́rculo azul, la córnea; en
blanco, la esclera; la periferia corneal (lı́nea gris) constituye el lı́mite corneo-escleral
o limbo. Las incisiones mostradas tienen 90o de longitud de arco, realizadas a 0o
(centrados en el eje x, dirección nasal-temporal); el eje y representa la dirección
superior-inferior; el eje z es el eje óptico. Izquierda: una incisión. Derecha: dos
incisiones enfrentadas.
a la cirugı́a de catarata. Para ello se realizará el análisis de la variación de cada
parámetro de forma aislada, permaneciendo los demás constantes. Por lo tanto se
aportará un punto de vista basado en la biomecánica corneal como complemento
al criterio clı́nico basado en la experiencia, lo que se espera contribuya a un mejor
conocimiento de la cirugı́a incisional, y por tanto, del control de sus resultados, dependiendo de las caracterı́sticas del paciente y del factor cirujano. Puesto que el
uso de nomogramas lleva a cierta impredecibilidad y escasa reproducibilidad de los
resultados, el objetivo a largo plazo de la simulación mediante modelos biomecánicos
serı́a la reproducción personalizada de cada caso, que indicarı́a los parámetros más
adecuados para cada paciente concreto. En el presente estudio se ha estimado el
efecto de la variación de los siguientes parámetros: zona óptica, longitud de la incisión y profundidad de corte, contrastándose los resultados con los de otros autores.
6.5.2
Simulación de las IRL
Al igual que en la simulación de cirugı́a de arcuatas, puesto que el modelo ha
sido simplificado a geometrı́a esférica, el cambio astigmático producido por la simulación de la cirugı́a se supondrá del mismo valor que la corrección astigmática que
inducirı́an esas incisiones en una córnea tórica con ese valor de astigmatismo preoperatorio. Esta suposición no puede hacerse para algunos casos, tales como córneas
con queratocono, caracterizadas por tejido debilitado y adelgazado, cuya respuesta
a la cirugı́a incisional es impredecible, debiendo evitarse por tanto practicar esta
técnica en presencia de ciertas patologı́as.
Para poder estimar los efectos de cada parámetro incisional (longitud, profundidad, distancia al centro corneal) de forma aislada, los demás parámetros definitorios de la cirugı́a incisional deben permanecer invariables. Además, la simulación
Capı́tulo 6. Simulación numérica de tratamientos refractivos
225
numérica permite realizar la simulación sobre un ojo que presenta las mismas caracterı́sticas biomecánicas en todos los casos, desvinculando el resultado de las caracterı́sticas particulares de cada paciente. Previamente a la simulación, se reproducen en
el modelo las condiciones fisiológicas iniciales según se muestra en el apartado 6.3).
Realizaremos la simulación en dos pasos: la aplicación de la PIO en la cara interna
del modelo, y posteriormente, la apertura del tejido en la posición correspondiente
a las incisiones. Los desplazamientos y la distribución de tensiones resultante de la
simulación se analiza a continuación, ası́ como el cambio astigmático inducido. La
simulación se realizó para un conjunto de incisiones de distintas longitudes, profundidades y distancia al centro corneal.
Los cortes se han practicado en un plano perpendicular a la superficie anterior de
la córnea. Los nodos situados en las interfaces donde se van a realizar las incisiones
son duplicados inicialmente. Las superficies a las que pertenecen se definen como
superficie máster y superficie esclava, y permanecen unidas entre sı́ mediante un
contacto rı́gido durante el primer step. Para imponer el contacto se comienza por
definir las superficies máster y esclava mediante las caras de los elementos que van
a ser separados al simular la apertura del tejido. Puesto que algunas simulaciones
deben reproducir incisiones enfrentadas, se definen dos conjuntos de superficies de
contacto, a las que se denomina MASTERW y SLAVEW, centradas en el eje de
abscisas hacia valores negativos, y MASTERE y SLAVEE, en el mismo eje pero en
valores positivos. La definición del contacto se realiza mediante las instrucciones:
*SURFACE INTERACTION, NAME=UNIDOSW
*FRICTION, ROUGH
*SURFACE BEHAVIOR, NO SEPARATION
*CONTACT PAIR, INTERACTION=UNIDOSW
SLAVEW, MASTERW
y de forma análoga:
*SURFACE INTERACTION, NAME=UNIDOSE
*FRICTION, ROUGH
*SURFACE BEHAVIOR, NO SEPARATION
*CONTACT PAIR, INTERACTION=UNIDOSE
SLAVEE, MASTERE
En el siguiente step, y bajo la aplicación del mismo valor de PIO, se elimina el
contacto entre las superficies provocando la apertura del tejido, simulando de esta
forma la realización de la incisión. Para ello, se introducen los comandos:
*MODEL CHANGE, TYPE=CONTACT PAIR, REMOVE
SLAVEW, MASTERW
SLAVEE, MASTERE
226
Modelado del ojo humano y tratamientos refractivos
Zona óptica 10 mm, Profundidad 90%
Longitud
∆D
45o
1,2
60o
1,4
90o
1,9
Tabla 6.7: Cambio astigmático inducido por la simulación de IRL para tres valores
de longitud de la incisión. La longitud se representa como los grados de arco (o )
abarcados por la incisión curva.
La estimación del astigmatismo inducido mediante la simulación de las incisiones
se realiza de forma análoga a la indicada en el apartado 6.4.2, mediante la expresión
propuesta por Munnerlyn et al. [1988] basada en el cambio de curvaturas de los
ejes de mayor y menor refringencia. Serı́a posible realizar un estudio aberrométrico
mediante el método de trazado de rayos, similar al realizado en el apartado 6.4.4;
sin embargo, dicho análisis queda fuera del alcance de este de este estudio, que
está enfocado únicamente a la influencia de ciertos parámetros incisionales en la
corrección del astigmatismo. La práctica clı́nica, generalmente, también obvia las
demás aberraciones producidas, pues el paciente adapta su sentido visual a las nuevas
caracterı́sticas ópticas de su ojo, “entrenando” su cerebro durante el postoperatorio.
6.5.3
Variación de la longitud de la incisión
El cambio astigmático obtenido tras la simulación de incisiones de distinta longitud se muestra en la Tabla 6.7.
Los resultados obtenidos muestran que al aumentar la longitud de la incisión,
expresada como la longitud del arco abarcado, mayor es el cambio astigmático inducido. Se inducen cambios astigmáticos de 1,2 D, 1,4 D y 1,9 D para incisiones de
45o , 60o y 90o realizadas en una zona óptica de 10 mm y a una profundidad del 90%
del espesor. La Figura 6.25 muestra estos resultados. Se ha utilizado como curva
de regresión para ajustar los valores obtenidos en las tres simulaciones una función
polinómica de segundo orden. La tendencia de mayor efecto con mayor longitud de
incisión aumenta hasta los 100o de arco, en que se alcanza una ası́ntota.
6.5.4
Variación de la profundidad de la incisión
La profundidad de corte tiene una gran influencia en el cambio astigmático producido (ver Tabla 6.8). A mayor profundidad, mayor efecto se induce. Se realizaron
simulaciones de incisiones pareadas a una zona óptica de 7,5 mm y 90o de longitud,
causando astigmatismos de 0,7 D, 2,6 D y 4,4 D para profundidades de 40%, 75%
y 90% del espesor corneal. La Figura 6.26 muestra los resultados correspondientes,
en la que se utiliza una función exponencial para ajustar los valores obtenidos.
Capı́tulo 6. Simulación numérica de tratamientos refractivos
227
Figura 6.25: Curva de regresión de los resultados obtenidos para la simulación de
IRL de longitudes 45o , 60o y 90o , zona óptica 10 mm y 90% de profundidad. La
tendencia aumenta con la longitud de la incisión hasta 100o de longitud de arco, en
que se alcanza un valor asintótico.
Zona óptica 7,5 mm, Longitud 90o
Profundidad
∆D
40%
0,7
75%
2,6
90%
4,4
Tabla 6.8: Cambio astigmático inducido por la simulación de IRL para distintos
valores de la profundidad de la incisión, indicada mediante el porcentaje (%) del
espesor corneal en la zona de localización de las incisiones.
228
Modelado del ojo humano y tratamientos refractivos
Figura 6.26: Incisiones pareadas de longitud 90o , zona óptica 7,5 mm. Curva exponencial de regresión que ajusta los valores de corrección obtenidos por simulación
numérica, 0,7 D, 2,6 D y 4,4 D, para 40%, 75% y 90% del espesor corneal. De
acuerdo a estos resultados de simulación, para corregir 1,5 D deberı́an realizarse
incisiones pareadas al 60% de profundidad.
Figura 6.27: Vista en sección de la distribución de tensiones (MPa) en el tejido para
incisiones limbares de profundidad de 40%, 75% y 90% del espesor corneal.
Capı́tulo 6. Simulación numérica de tratamientos refractivos
Longitud 90o , Profundidad 90%
Zona óptica
∆D
7,5 mm
4,4
229
10 mm
1,9
Tabla 6.9: Cambio astigmático inducido por la simulación de IRL para zona óptica
de 7,5 mm y 10 mm.
Figura 6.28: Distribución de desplazamientos, en milı́metros, en el modelo de elementos finitos del ojo tras la simulación de incisiones enfrentadas de 90o de arco y
profundidad del 90% del espesor corneal; zona óptica de 10 mm (izquierda) y de
7,5 mm (derecha). Cuanto mayor es la distancia de las incisiones al centro corneal,
más pequeños son los desplazamientos que se producen, por lo que el efecto de las
incisiones es menor.
La Figura 6.27 muestra un corte coronal de la córnea tras la simulación de los
casos indicados de simulación de incisiones limbares. La tensión principal máxima
aumenta con la profundidad de la incisión, produciéndose una concentración de
tensiones en el el tejido correspondiente a la máxima profundidad de corte.
6.5.5
Variación de la zona óptica
La zona óptica es el factor que muestra mayor influencia. Cuanto más próximas
se practiquen las incisiones al ápex corneal, mayor efecto astigmático se produce.
En la Tabla 6.9 se muestran los resultados obtenidos para los casos de incisiones de
longitud 90o y 90% de profundidad, para zonas ópticas de 10 y 7,5 mm, obteniéndose
valores de 1,9 D y 4,4 D, respectivamente.
Los nomogramas de IRL no especifican la zona óptica en la que deben ser
230
Modelado del ojo humano y tratamientos refractivos
realizadas las incisiones porque el tamaño de la córnea de cada paciente es distinto, siendo el diámetro corneal delimitado por el limbo y como consecuencia, la
posición de la incisión limbar. En consecuencia, la longitud de la incisión debe
expresarse como los grados de arco abarcados, y no como longitud de corte. El
efecto astigmático inducido por incisiones limbares de un mismo grado de arco en
dos córneas de distinto tamaño es similar. En la córnea de mayor diámetro las
incisiones estarı́an más alejadas del ápex pero la longitud de corte serı́a mayor,
equilibrándose ambos efectos.
La simulación numérica permite predecir el cambio astigmático que se producirı́a
en un paciente especı́fico porque tanto el diámetro corneal como los grados de arco
de la incisión pueden ser parámetros de diseño del modelo.
6.5.6
Comparación con resultados clı́nicos
Para poder evaluar los resultados obtenidos de la simulación numérica con el
modelo biomecánico presentado se ha recurrido tanto a la experiencia clı́nica como
a la bibliografı́a. Cualitativamente, los resultados obtenidos confirman las tendencias
observada en la práctica clı́nica de cirugı́a incisional: el cambio astigmático inducido
aumenta al aumentar la profundidad de corte, al disminuir la zona óptica y al
aumentar la longitud de la incisión.
Tanto la experiencia clı́nica como la simulación numérica indican que el aumento
de longitud de la incisión produce un mayor cambio astigmático, pero sólo hasta
una longitud de arco de 100o . A partir de esta longitud, ambos meridianos se
aplanan. Como muestra la Figura 6.25, este efecto se reproduce también en el modelo biomecánico. Por tanto, si deber corregirse más de 2 dioptrı́as de astigmatismo
(o de 3 dioptrı́as, en los casos de cirugı́a de catarata, en que la incisión principal
puede causar un efecto astigmático aproximado de 1 D), las incisiones deben realizarse más próximas al eje óptico, es decir, a una menor zona óptica, por lo que se
realizan incisiones no limbares sino curvas en córnea clara (arcuatas). En cuanto
a la profundidad de la incisión, la curva de regresión (Figura 6.26) muestra un
efecto que ha sido también observado clı́nicamente: al aumentar la profundidad de
la incisión, el cambio astigmático inducido no aumenta linealmente sino de forma
exponencial, ası́ que las incisiones de poca profundidad ofrecen un mayor control
sobre el resultado y mayor estabilidad.
Una validación cuantitativa del modelo es más difı́cil de conseguir. Principalmente porque la cirugı́a incisional se realiza de forma manual, lo que hace que los
resultados dependan del factor humano. Éste y otros factores, como la calidad del
corte o la calibración de la incisión hacen que sea difı́cil lograr reproducibilidad
de los resultados. Además, existen otros factores cuya influencia no ha podido ser
cuantificada hasta el momento, asociados a las caracterı́sticas del paciente, según su
edad, refracción y propiedades biomecánicas corneales.
Akura et al. [2001] publicó sus resultados de 13 pacientes (Tablas 6.10 y 6.11)
Capı́tulo 6. Simulación numérica de tratamientos refractivos
Caso
IRL
1
2
3
4
5
6
IRL + catarata
7
8
9
10
11
12
13
231
Edad (años)
Long. incisión (o )
Profundidad (%)
Z.O. (mm)
Cambio astigmático (D)
73
74
62
63
57
57
2x90
2x90
2x90
2x90
2x90
2x90
40
40
50
50
60
60
8,2
7,4
7,5
8,0
7,2
7,4
0,53
0,79
2,09
2,15
3,30
2,87
84
68
70
75
75
84
95
2x90
2x90
2x90
2x90
2x90
2x90
2x90
40
40
50
50
50
60
75
7,0
7,7
7,5
8,0
8,0
7,3
7,5
1,14
1,25
2,04
1,58
1,76
3,33
4,44
Tabla 6.10: Resultados de IRL de los casos presentados por Akura et al. [2001],
simples o combinadas con cirugı́a de catarata.
Profundidad (%)
40
50
60
75
Valor medio (D) 0,93 ± 0,33 1,92 ± 0,24 3,17 ± 0,26 4,44
Tabla 6.11: Valor medio de los resultados de IRL obtenidos por Akura et al. [2001].
La profundidad se indica como porcentaje del espesor corneal en la posición de la
incisión.
para incisiones pareadas de 90o de longitud en zonas ópticas entre 7,0 y 8,2 mm y
profundidad de incisión entre 40% y 75% de espesor corneal, realizadas de forma
aislada o combinada con cirugı́a de catarata. El efecto astigmático inducido por la incisión perforante de la facoemulsificación debe ser añadido al causado por la incisión
principal de la facoemulsificación. Debido a la variabilidad de las condiciones, los
resultados no se pueden generalizar. El autor sugiere que existe una relación lineal
entre el cambio astigmático y la profundidad de las incisiones, medida como porcentaje del espesor corneal, considerando todos los casos. Sin embargo, si los casos
simultáneos a cirugı́a de catarata se analizan por separado de los que no realizaron
dicha cirugı́a, la linealidad no es tan obvia. La Figura 6.29 representa gráficamente
estos resultados.
Si se comparan los resultados de Akura et al. [2001] con aquellos obtenidos por
simulación numérica, puede observarse que para una zona óptica de 7,5 mm, incisiones pareadas de 90o de longitud y profundidad de 40% del espesor corneal,
los resultados son bastante próximos: 0,7 D estimadas por la simulación frente a
0,93±0,33 D según Akura et al. [2001]. Los mismos parámetros incisionales para una
profundidad del 60% causó un cambio astigmático de 2 D según nuestra simulación
numérica frente a 3,17±0,26 D según Akura et al. [2001]. El resultado de simulación
numérica es menor, pero puede ser explicado porque las incisiones de Akura et al.
[2001] fueron realizadas a una zona óptica menor de 7,5 mm, que es el valor utilizado
en los casos simulados.
232
Modelado del ojo humano y tratamientos refractivos
Figura 6.29: Relación entre la profundidad de la incisión y el cambio astigmático tres
meses después de la cirugı́a según los resultados de Akura et al. [2001]. Los cı́rculos
representan los resultados de incisiones independientes, mientras que los cuadrados
representan el resultado de las incisiones combinadas con cirugı́a de catarata.
Finalmente, para incisiones de profundidad de 75% los resultados son bastante
distintos que los de Akura et al. [2001]: 2,6 D según la simulación numérica frente
a 4,44 D obtenidas por este autor. Este resultado puede no ser una referencia
válida, pues es un valor correspondiente a un caso, no un resultado estadı́stico de un
número representativo de casos, además de estar condicionado por que esta cirugı́a
fue simultánea a una facoemulsificación en la que el efecto de la incisión principal
ha podido influenciar de forma relevante el cambio astigmático postquirúrgico.
Los resultados obtenidos por simulación de las incisiones a una zona óptica de
10 mm no pueden ser validados por no estar documentados en bibliografı́a. Sin
embargo, el resultado de simulación muestra que el efecto astigmático provocado por
las incisiones limbares no es elevado: 1,9 D inducido por una incisión de longitud
90o de arco, que es el máximo valor obtenido entre los casos reproducidos. Si pueden
inducirse cambios astigmáticos hasta 1,9 D, aproximadamente 2 D, utilizando IRL,
al considerar a su vez la contribución de la incisión principal de la cirugı́a de catarata
y sumarse los efectos de ambas, resulta que puede provocarse un cambio astigmático
máximo de 3 D.
Capı́tulo 6. Simulación numérica de tratamientos refractivos
6.5.7
233
Comparación con diversos nomogramas. Consideración
de otros parámetros
Los resultados, como se ha visto, reproducen los efectos clı́nicamente observados.
En este apartado se comparan diversos nomogramas y cómo ponderan el efecto
de los parámetros considerados en este estudio, es decir, longitud de la incisión,
profundidad y zona óptica, junto con otros parámetros a tener en cuenta, como la
edad y el tipo de astigmatismo previo a la cirugı́a.
El nomograma de Cristóbal et al. [2006] considera el caso de incisiones limbares
asociadas a la incisión principal de la cirugı́a de catarata, por lo que dichas incisiones
limbares se utilizan para completar el efecto astigmático conseguido por la incisión
perforante principal. Aquellos casos en que se requiere una corrección astigmática
mayor de 3 D, el nomograma indica la realización de arcuatas, que son incisiones
curvas más próximas al centro corneal que el lı́mite limbar, cuyo efecto es mayor
que el de las IRL. Como se ha indicado, este valor coincide con el resultado obtenido
por simulación. Otro autor, Budak et al. [2001], indica que las IRL son efectivas en
casos de hasta 2,00 D de astigmatismo. Por tanto, se puede considerar validados los
resultados numéricos obtenidos.
La experiencia de la mayorı́a de autores muestra que el efecto de la cirugı́a
incisional aumenta al aumentar la edad [Bayramlar et al., 2003; Wang et al., 2003].
Este hecho se recoge en los nomogramas: tanto Nichamin [2006] como Cristóbal
et al. [2006] indican que debe realizarse una disminución en la longitud o en la
profundidad de la incisión, respectivamente, al aumentar la edad del paciente. La
influencia de la edad es debida probablemente a la modificación de las propiedades
biomecánicas del tejido corneal con la edad. Esta influencia de la edad no ha sido
recogida en el modelo biomecánico.
Respecto a la profundidad de la incisión, tanto Cristóbal et al. [2006] como
Nichamin [2006] incluyen este parámentro en sus nomogramas en un mismo sentido, considerando que al aumentar la profundidad de la incisión, mayor es el efecto
obtenido. El resultado de simulación confirma este efecto. Nichamin [2006] modifica la profundidad de corte según la paquimetrı́a, siendo inicialmente el 90% para
todos los casos. Cristóbal et al. [2006] modifica la profundidad según el tipo de
astigmatismo y la edad del paciente. Es recomendable realizar una paquimetrı́a
de la periferia corneal previa a la cirugı́a incisional, pues esta medida puede evitar perforaciones inesperadas [Budak et al., 2001]. Los métodos más comunes para
realizar paquimetrı́a periférica son la topografı́a de no-contacto y la paquimetrı́a ultrasónica, ambas presentadas en el Capı́tulo 2. Por una parte, la paquı́metrı́a de no
contacto realizada por topógrafos (Orbscan, Visante) no son capaces, por lo general,
de medir más de 8-9 mm de diámetro corneal. La paquimetrı́a prelimbar sólo puede
estimarse en caso de córneas pequeñas. Además, la medida de la paquimetrı́a con
estos equipos no es precisa, aunque su estimación es aceptable. Por otra parte, los
paquı́metros de ultrasonidos aportan una medida precisa en el punto medido, pero
Modelado del ojo humano y tratamientos refractivos
234
el valor exacto de la posición de la sonda de medida se desconoce. Es recomendable
verificar que la paquimetrı́a topográfica en el área en la que se van a realizar las incisiones coincide con la paquimetrı́a ultrasónica intraoperatoria. Debe mencionarse
que las córneas con paquimetrı́a periférica demasiado delgada no deben ser objeto
de cirugı́a incisional.
Una discusión similar a la realizada con la profundidad de corte puede realizarse
acerca del tipo de astigmatismo. El astigmatismo en contra de la regla requiere
incisiones más profundas (según Cristóbal et al. [2006]) o más largas (según Nichamin
[2006]). Este aspecto no ha sido incluido en el modelo biomecánico porque la córnea
se simplificó a geometrı́a esférica, por lo que no hay ningún meridiano más curvo
que los demás.
La simulación numérica ofrece un amplio rango de posibilidades que añadir a
las ya recogidas en los nomogramas. El efecto de cada parámetro incisional puede
ser estimado de forma aislada y optimizado para cada caso. Por ejemplo, si debe
corregirse un astigmatismo de 1,5 D (Figura 6.26) y el cirujano oftalmólogo decide
realizar incisiones pareadas de 90o de arco en una zona óptica de 7,5 mm, la simulación numérica indica que la profundidad de la incisión debe ser 60% del espesor
de esa zona de la córnea. Como se ha mencionado anteriormente, la correlación
de todos los resultados de simulación no es lineal, por lo que se ha realizado un
ajuste exponencial de los tres casos simulados. Obviamente, cada caso especı́fico
puede ser reproducido en el modelo y estimar el cambio astigmático provocado. El
resultado postquirúrgico debe ser analizado no sólo en cuanto al cambio astigmático
inducido, sino también considerando la agudeza visual, para lo cual podrı́a realizarse
un análisis por métodos ópticos, como el presentado en el apartados anterior correspondiente a la simulación de cirugı́a de arcuatas. Se diseñarı́a un modelo óptico a
partir de la geometrı́a corneal deformada obtenida mediante simulación numérica,
estimando posteriormente las aberraciones producidas por la cirugı́a mediante el
método de trazado de rayos.
6.5.8
Discusión
En este estudio se ha realizado una revisión bibliográfica de los nomogramas de
IRL para corrección del astigmatismo, con el propósito de establecer lı́neas comunes
entre ellos y discutir la influencia de parámetros que, o no se consideran, o se consideran de forma distinta en los distintos nomogramas. El astigmatismo preoperatorio,
el número de incisiones y la longitud de las incisiones son parámetros que todos los
autores consideran. El tipo de astigmatismo (a favor de la regla, en contra de la
regla u oblı́cuo), la edad y la profundidad de la incisión son parámetros relevantes
para obtener el resultado óptimo de las incisiones.
Por otra parte, el modelado biomecánico permite aislar la influencia de un solo
parámetro incisional, aportando ası́ un punto de vista adicional al clı́nico para decidir
los valores de los parámetros en la planificación quirúrgica.
Capı́tulo 6. Simulación numérica de tratamientos refractivos
235
Mediante simulación de cirugı́a incisional se han reproducido los efectos que se
conocen por la práctica clı́nica: cuanto más profunda, más larga y más próxima al
ápex corneal se realice la incisión, mayor efecto astigmático causa.
Los resultados de simulación fueron los siguientes: para incisiones de 45o , 60o
y 90o , zona óptica de 10 mm y profundidad 90% del espesor corneal en esa zona,
se inducen valores de astigmatismo de 1,2, 1,4 y 1,9 D. Incisiones pareadas en zona
óptica de 7,5 mm y 90o de longitud causan cambios astigmáticos de 0,7, 2,6 y 4,4
D a profundidades de 40%, 75% y 90% del espesor corneal. Incisiones pareadas de
90o de longitud y 90% de profundidad en zona óptica de 10 mm y 7,5 mm causan
un cambio asigmático de 1,9 y 4,4 D, respectivamente.
Se ha validado el nomograma de Cristóbal et al. [2006] en cuanto a la necesidad
de realizar arcuatas en aquellos casos en que el astigmatismo preoperatorio supera
las 3 D.
Según se ha expuesto, el efecto astigmático inducido aumenta con la longitud
de la incisión, pero sólo hasta alcanzar los 100o de longitud (Figura 6.25), por lo
tanto este parámetro no puede ser aumentado y hay que recurrir a la modificación
de otro parámetro, como la zona óptica, cuya disminución significa que la incisión
no es limbar, en el lı́mite corneo-escleral, sino arcuata, en córnea clara.
La variación de la profundidad de la incisión también reproduce los resultados
esperados. Incisiones menos profundas, aunque menos efectivas, son más recomendables para la estabilidad, por lo que es un parámetro que debe ser optimizado.
Finalmente, debe indicarse que el factor humano está siempre presente en las cirugı́as
practicadas de forma manual, y por lo tanto, cada cirujano debe establecer sus
propias correcciones estadı́sticas basadas en su historial de resultados con el fin de
optimizar los resultados a la hora de afrontar la cirugı́a.
6.6
6.6.1
Cirugı́a refractiva con láser excı́mer: PRK
Introducción
LASIK y PRK son técnicas de frecuente aplicación en cirugı́a refractiva con láser
excı́mer para la corrección de miopı́a, hipermetropı́a y astigmatismo, que han sido
presentadas en el Capı́tulo 3. En general, el cirujano introduce en el computador
que gestiona el láser excı́mer los datos de refracción del paciente, y éste calcula los
parámetros de la ablación.
No todos los pacientes presentan unas mismas caracterı́sticas, por el contrario,
existen factores que varı́an de un paciente a otro. La presión intraocular (PIO),
el espesor corneal o la respuesta elástica de la córnea son algunos de ellos. En
el presente estudio se propone que, en la planificación quirúrgica de cirugı́a láser,
deben considerarse dichos factores para la correcta estimación de los parámetros
de ablación. Idealmente, en un modelo de elementos finitos personalizado, tanto
236
Modelado del ojo humano y tratamientos refractivos
la geometrı́a (topografı́a anterior y paquimetrı́a) como la presión intraocular reproducirı́an la córnea del paciente mediante la topografı́a y tonometrı́a, respectivamente.
Asimismo, para una fiel reproducción del comportamiento del tejido corneal del paciente, serı́a deseable poder estimar las propiedades de material medidas in vivo,
que en la actualidad puede realizarse mediante el ORA (ver apartado 2.3.1).
El alcance de este estudio es determinar la influencia del valor de la PIO del
paciente en los parámetros de ablación. Con este objetivo se ha simulado la cirugı́a
refractiva con láser excı́mer para corrección de miopı́a sobre un modelo de ojo humano. El modelo es el correspondiente a la geometrı́a esférica presentado en el
apartado 6.1.2. Se han realizado simulaciones de cinco casos de ablación corneal,
correspondientes a cinco niveles distintos de miopı́a: 2, 4, 6, 8 y 10 dioptrı́as.
6.6.2
Simulación de la cirugı́a
Para el tallado corneal se realiza una ablación del tejido mediante equipos de láser
excı́mer, los cuales incorporan en su propio software el cálculo de los parámetros de
ablación. El cirujano oftalmólogo debe introducir los datos del paciente en dicho
equipo, pero su labor no queda limitada al manejo de dichos equipos a nivel de
usuario, sino también la verificación, desde su experiencia clı́nica, de que el aparato
procesa correctamente esa información, supervisando los parámetros de ablación
estimados por el software del aparato.
Para la simulación de la cirugı́a que se presenta en este apartado se ha utilizado
el modelo de elementos finitos de geometrı́a esférica (apartado 6.1.2), en el que se
ha creado un mallado adecuado a la simulación de cirugı́a de ablación láser para
corrección miópica.
Previamente a la simulación, se reproducen en el modelo las condiciones fisiológicas según se muestra en el apartado 6.3. Se han realizado simulaciones de
ablación de tejido corneal para la corrección de miopı́a de cinco niveles: 2D, 4D, 6D,
8D y 10D, utilizando Abaqus v6.5 [Hibbit et al., 2005]. El cálculo se desarrolla en 6
steps. En el primer step se aplica la PIO de valor 15 mmHg sobre la membrana que
recubre interiormente el modelo.
En el segundo y posteriores steps del cálculo, en presencia del mismo valor de
presión fisiológica, se realiza la eliminación sucesiva de las cinco capas de elementos,
de la más externa a la más interna, para la simulación de corrección desde 2D hasta
10D. Tras la eliminación de elementos que se realiza en cada step, la curvatura
anterior se modifica adoptando una geometrı́a deformada en la que se equilibra la
PIO. Los elementos pertenecientes a las cinco capas de ablación constituyen los
grupos DIOP2, DIOP4, DIOP6, DIOP8 y DIOP10, respectivamente. Los comandos
utilizados son los siguientes. En el step 2:
*MODEL CHANGE, TYPE= ELEMENT, REMOVE
DIOP2
Capı́tulo 6. Simulación numérica de tratamientos refractivos
237
Figura 6.30: Nodos del lecho estromal tras la simulación de ablaciones corneales de
2, 4, 6, 8 y 10 D, PIO de 15 mmHg. Los puntos negros representan la superficie
anterior corneal. El número de nodos considerados para el ajuste del radio son 11 y
19, según se tome un radio de área central rac de 1,5 mm o 2,5 mm, respectivamente.
Análogamente, se utiliza la misma lı́nea de comando para eliminar las capas de
elementos DIOP4, DIOP6, DIOP8 y DIOP10 en el step 3, step 4, step 5 y step 6,
respectivamente.
6.6.3
Importancia de la introducción de las tensiones iniciales
La Figura 6.9 muestra la distribución de desplazamientos presente en el modelo
previa a la simulación de la ablación laser, en la que las tensiones del tejido equilibran un valor de PIO de 15 mmHg (izquierda) frente al modelo sin la introducción
de dichas tensiones (derecha). En ambos casos, la distribución sigue un patrón similar, pero los valores son cuatro órdenes superiores en el caso de que la configuración
inicial sea libre de tensiones: 9,663×10−2 mm frente a 6,688×10−5 mm.
Tras la simulación de las sucesivas etapas de ablación de tejido corneal, se alcanza
una configuración en equilibrio de tensiones en la que la geometrı́a deformada de
la superficie anterior determina la potencia óptica corneal. Las coordenadas de los
nodos pertenecientes a la superficie anterior corneal que estén dentro de la zona
óptica se ajustan mediante mı́nimos cuadrados para obtener el radio de curvatura
(Figura 6.30). A partir de este radio se puede calcular la potencia óptica en dioptrı́as
de dicha superficie, según la expresión (6.5) propuesta por Munnerlyn et al. [1988].
La Figura 6.30 muestra, en lı́nea de puntos, la curvatura de la superficie ante-
Modelado del ojo humano y tratamientos refractivos
238
Figura 6.31: Las gráficas representan el cambio en dioptrı́as de la simulación de
cirugı́a refractiva con láser excı́mer con (izquierda) y sin (derecha) la introducción
previa de tensiones iniciales en el modelo, PIO de 15 mmHg. Los cı́rculos representan la corrección esperada; los rombos y los cuadrados, los resultados estimados
utilizando un radio de área de ajuste de 1,5 mm y 2,5 mm, respectivamente.
Corrección esperada
2D
4D
6D
8D
10 D
SIN TENSIONES INICIALES
rac = 1, 5mm
rac = 2, 5mm
3,308
-0,072
4,798
1,464
6,286
2,997
7,646
4,439
9,024
5,908
CON TENSIONES INICIALES
rac = 1, 5mm
rac = 2, 5mm
3,323
3,412
4,795
4,948
6,261
6,477
7,593
7,912
8,931
9,370
Tabla 6.12: Valores de corrección de miopı́a (D) obtenidos por simulación numérica
de la simulación con (izquierda) y sin (derecha) introducción de las tensiones iniciales
en el modelo antes de la simulación. PIO de 15 mmHg. Los resultados varı́an
dependiendo del radio de área central (rac ) considerado.
rior corneal antes de la simulación, que reproduce la configuración in vivo bajo la
distribución de tensiones iniciales y PIO de 15 mmHg. Las otras cinco curvaturas
representan los nodos utilizados para el ajuste del radio de curvatura R. Se han considerado dos valores para el radio del área central rac : 1,5 mm y 2,5 mm. El tamaño
considerado del área central determina el número de nodos centrales utilizados para
la estimación de R y el posterior cálculo de la corrección miópica. Se consideraron
los dos valores indicados de rac porque algunos topógrafos utilizan estas áreas para
estimar la topografı́a y la paquimetrı́a y para realizar el cálculo de la queratometrı́a.
La simulación de cirugı́a para corrección de cinco niveles de miopı́a se realizó con
y sin introducción previa de la distribución de tensiones iniciales que compensa la
acción de la PIO. Los valores obtenidos para el cambio dióptrico en ambas situaciones
se recogen en la Tabla 6.12 y se pueden observar en la Figura 6.31. En el caso en
que se consideran las tensiones iniciales, los resultados coinciden con los valores
esperados de corrección de miopı́a para 6, 8 y 10 D. Para los otros dos casos, 2
Capı́tulo 6. Simulación numérica de tratamientos refractivos
239
Figura 6.32: Corte transversal de la córnea en el que se muestra la distribución de
tensión principal máxima (MPa) tras ablaciones corneales para la corrección de 2D
(izquierda) y 10 D (derecha) de miopı́a, PIO de 15 mmHg.
D y 4 D, los resultados predicen una hipercorrección de la miopı́a. Este resultado
puede ser interpretado por la observación empı́rica de Dupps and Wilson [2006],
según la cual, ablaciones poco profundas producen un aplanamiento del área central
de la córnea, pero si la ablación es profunda se produce cierto incurvamiento de
dicha región corneal debida a un lecho residual más delgado, unido a que el material
corneal es más rı́gido en capas profundas, lo que inducirı́a una menor corrección que
la esperada.
Si las tensiones iniciales no se introducen en el modelo, los resultados muestran
una fuerte dependencia del radio considerado para el área central de ajuste, como
puede esperarse de la distribución de desplazamientos que se ha presentado previamente (Figura 6.9). Como conclusión, se debe considerar las tensiones fisiológicas
iniciales en el modelo antes de realizar la simulación de la cirugı́a, no sólo porque se
reproducen las condiciones in vivo, sino también porque se obtienen resultados de
corrección miópica más coherentes.
La Figura 6.32 muestra la distribución de tensiones correspondiente a los casos
de 2 D y 10 D de ablación láser. Aunque los valores máximos de tensión principal
máxima se localizan en la periferia corneal, se observa el valor alcanzado en el centro
de la nueva cara anterior (superficie de lecho estromal) tras la eliminación de tejido,
para evaluar el efecto de la ablación laser.
En la Tabla 6.13 se muestran los valores de tensión principal máxima que aparecen en cada step de 2D de corrección, desde la ablación de 2 D hasta la de 10 D. En
este área óptica, la tensión principal máxima aumenta del caso de menor nivel de
miopı́a, 2 D, al de mayor, 10 D, en el que el máximo valor alcanzado es 2,07×10−2
MPa. En cada step de la simulación se elimina una capa central de elementos de
Modelado del ojo humano y tratamientos refractivos
240
SmaxP ral (M P a)
∆SmaxP ral (%)
2D
1,50×10−2
−
4D
1,60×10−2
6,67
6D
1,73×10−2
8,12
8D
1,89×10−2
9,25
10D
2,07×10−2
9,52
Tabla 6.13: Tensión principal máxima en el área central del lecho estromal después
de la simulación de la ablación, PIO de 15 mmHg, e incremento en % correspondiente
a cada step de 2 D.
la superficie anterior corneal, provocando una modificación en la curvatura y una
disminución en el espesor de la córnea. Por lo tanto, aparece una concentración de
tensiones en esta región y, si el lecho estromal se hace demasiado delgado o el valor
de la tensión alcanza valores muy altos, puede provocarse daño en el tejido.
El valor máximo de las tensiones iniciales obtenido para un valor medio de PIO
de 15 mmHg es 0,03 MPa y se alcanza en la periferia corneal.
Se obtienen diferencias entre la corrección obtenida por la simulación y la indicada por la expresión teórica [Munnerlyn et al., 1988]. Ese hecho indica que el valor
de la PIO tiene influencia en la potencia óptica post-quirúrgica de la córnea, por lo
que la profundidad de la ablación debe ser optimizada en cada caso de acuerdo al
valor de la PIO de cada paciente especı́fico. Además, la PIO no sólo determina la
potencia óptica post-quirúrgica de la córnea, sino también el valor de las tensiones
iniciales del tejido. Esto implica que la cirugı́a aplicada a diferentes ojos actúa bajo
distintas condiciones, en tejido corneal con más o menos nivel de tensión, lo que
puede modificar los resultados refractivos de la cirugı́a. En este estudio queda en
evidencia la importancia de introducir las tensiones iniciales en el modelo previamente a la simulación de la cirugı́a, lo cual es evidente a partir de condiciones de
contorno irreales.
6.6.4
Importancia de la PIO en los resultados refractivos
El mismo análisis se realiza para otros dos valores de PIO: 10 mmHg y 21 mmHg.
En ambos casos, la distribución de tensiones iniciales se introduce en el modelo
previamente a la simulación de la cirugı́a. La Figura 6.33 representa la corrección
miópica obtenida. Para los tres valores de PIO considerados, la corrección estimada
utilizando un valor pequeño del radio de área central (1,5 mm) coincide con los
resultados obtenidos por la expresión (6.5) de Munnerlyn mucho mejor que si se
utiliza un mayor radio (2,5 mm). Para la presión más alta de las introducidas (21
mmHg) se obtiene una infracorrección de la miopı́a, para los casos de 8 D y 10 D
más significativa que en menores valores de PIO.
Para las simulaciones con el menor valor de PIO (10 mmHg), los valores de
tensión principal máxima obtenidos en el centro del lecho estromal son: 1,23×10−2 ,
1,29×10−2 , 1,38×10−2 , 1,49·10−2 y 1,61×10−2 MPa tras la ablación de niveles de
miopı́a de 2, 4, 6, 8 y 10 D. Para el caso de 21 mmHg, los valores obtenidos fueron
Capı́tulo 6. Simulación numérica de tratamientos refractivos
241
Figura 6.33: Las gráficas representan la corrección de miopı́a resultante de la simulación para los casos de 2, 4, 6, 8 y 10 D, con valores de PIO de 10 mmHg (izquierda)
y 21 mmHg (derecha).
2,5·10-2, 2,65×10−2 , 2,86×10−2 , 3,08×10−2 y 3,31×10−2 MPa para corrección de 2,
4, 6, 8 y 10 D, respectivamente. Valores altos de PIO provocan concentraciones de
tensión más elevadas en el área central tras la cirugı́a.
El tejido corneal ha sido modelado como material hiperelástico. Sin embargo, los
resultados muestran una relación lineal con el aumento del valor de PIO. Este efecto
es debido a que, en el rango de PIO fisiológica sana (10-21 mmHg) y hasta valores de
30 mmHg, el comportamiento del tejido córneal es prácticamente lineal. La Figura
6.34 muestra la curva de comportamiento tensión principal vs. alargamiento del
modelo de material que se ha asignado a la córnea. La región inicial, cuyos valores
de tensión principal son del orden de 10−2 MPa correspondientes al rango de PIO
fisiológica sana, es casi lineal. Este efecto ha sido observado experimentalmente
y aceptado por diversos autores [Bryant and McDonnell, 1996; Gefen et al., 2009;
Studer et al., 2010].
6.6.5
Discusión
Al describir la simulación de la cirugı́a, se ha referido tanto a cirugı́a LASIK
como a PRK. La diferencia básica entre las dos técnicas es la creación, o no, del
flap antes de la ablación. Se ha simulado la cirugı́a refractiva con láser excı́mer con
un modelo en el que el epitelio no se considera. Puesto que la PRK se aplica tras
desepitelizar la córnea, nuestra simulación corresponde a esta técnica. La simulación
de LASIK supondrı́a crear un flap, por tanto, parte del tejido estromal serı́a eliminado antes de la ablación (entre 70 y 100 micras), modificando la curvatura inicial
de la superficie anterior corneal sobre la cual se va a iniciar la ablación. Esto podrı́a
causar diferencias en los resultados de simulación obtenidos.
Existen algunos estudios anteriores de simulación de cirugı́a láser para corrección
Modelado del ojo humano y tratamientos refractivos
242
(a)
(b)
Figura 6.34: (a) Curva de comportamiento tensión principal vs. alargamiento del
modelo de material asignado a la córnea. (b) La región inicial (valores de tensión
principal del orden de 10−2 MPa), correspondiente al rango de PIO fisiológica sana
(10-21 mmHg), es casi lineal.
de miopı́a, ofreciendo diferentes resultados. Alastrué et al. [2006] observó infracorrección para todos los casos de corrección que simularon, (entre 2D a 10 D); sin
embargo, en este trabajo no se consideró la introducción de las tensiones iniciales en
el modelo. Por otra parte, Pandolfi et al. [2009] realizaron simulaciones de corrección
miópica mediante ablación laser para una córnea con -3D; obteniendo una pequeña
dependencia de la corrección miópica asociada al aumento de PIO y resultando una
infracorrección para valores de PIO mayores de 15 mmHg, lo cual está de acuerdo
con los resultados de este estudio.
Se ha observado mediante las simulaciones de cirugı́a refractiva por ablación
láser realizadas, que cuanto mayor es la profundidad de ablación, mayores valores
de tensión se alcanzan en la zona central del lecho estromal. Este hecho confirma la
indicación clı́nica de que, puesto que la ablación provoca una disminución del espesor
corneal, el paciente debe ser descartado como candidato a esta cirugı́a si no tiene
una paquimetrı́a preoperatoria suficiente que asegure un estroma residual suficiente
tras la cirugı́a. La concentración de tensiones generada en la córnea central tras la
ablación láser puede causar ectasia, Haze u otras complicaciones.
La metodologı́a presentada es una herramienta útil para estimar el valor óptimo
de la profundidad de ablación para un paciente especı́fico. Al planificar la cirugı́a, se
simuları́a mediante la introducción de la PIO medida del paciente por tonometrı́a.
Se obtendrı́a mediante simulación numérica el resultado post-quirúrgico, resultando
una corrección total, una infracorrección o una hipercorrección. En estos dos últimos
casos, deberı́a modificarse el valor de la profundidad, aumentado o disminuido según
el resultado. Sucesivas simulaciones culminarı́an en la obtención del valor óptimo
Capı́tulo 6. Simulación numérica de tratamientos refractivos
243
para este parámetro.
6.7
Tratamientos combinados para el queratocono:
cross-linking + inserción de segmentos intraestromales
En el Capı́tulo 3 se expone brevemente la patologı́a del queratocono y la problemática de su tratamiento. Por el interés que despierta esta patologı́a a nivel
mundial, está siendo investigada en busca de un protocolo efectivo de tratamiento
que permita detener, o incluso retraer, su evolución con el fin de mejorar la calidad
de vida del paciente y retrasar o evitar la necesidad de una queratoplastia.
En este apartado se realiza un análisis mediante simulación numérica de los
efectos de ambos tratamientos, aislados y combinados, con la inquietud de poder
aportar a la investigación clı́nica un criterio biomecánico en el que poderse apoyar
para establecer el protocolo de actuación en el tratamiento del queratocono.
El desarrollo del modelo geométrico y de elementos finitos de una córnea con
queratocono, utilizado posteriormente en las simulaciones, se expone a continuación.
En dicho modelo se considera el adelgazamiento del tejido del vértice del cono y un
entorno de 2 mm de radio con centro en dicho vértice. Se ha realizado una simplificación en morfologı́a frente a un queratocono real: se ha modelado con geometrı́a
de revolución, es decir, el cono alineado con el eje óptico, aunque es más habitual
que el queratocono se presente en el cuadrante inferior-nasal o inferior-temporal.
Previamente a la simulación, se reproducen en el modelo las condiciones fisiológicas, introduciendo una distribución de tensiones iniciales que equilibran la
PIO. Se ha utilizado en todos los casos un valor medio de PIO de 15 mmHg.
Se comienza por exponer las simulaciones realizadas de los tratamientos de inserción de segmentos intraestromales de anillos corneales (ICRS) y cross-linking de
colágeno corneal (CXL), por separado. Posteriormente, se realizan simulaciones
de la combinación de ambos tratamientos, intercambiando el orden de aplicación:
tratamiento de CXL previo a la inserción de ICRS, y viceversa.
6.7.1
Modelo patológico de queratocono
En el Capı́tulo 3 se presentaba el queratocono, una patologı́a que causa degeneración morfológica y estructural del tejido corneal. En este apartado se realiza
un estudio mediante simulación numérica de los distintos tratamientos propuestos
para esta patologı́a, tanto de forma individual como combinada. Con este fin, se
ha desarrollado un modelo de elementos finitos de queratocono, que se describe a
continuación.
El queratocono es una patologı́a caracterizada por la variabilidad de las caracterı́sticas refractivas, biomecánicas y morfológicas que presenta. Sin embargo, existen
244
Modelado del ojo humano y tratamientos refractivos
Figura 6.35: Simplificación realizada en el modelado geométrico del queratocono. En
un queratocono, el ápex, punto central de la superficie anterior corneal, no coincide
con el vértice del cono, punto que presenta el mı́nimo espesor corneal. En nuestro
modelo se asume que ambos puntos coinciden y están alineados con el eje óptico.
ciertas caracterı́sticas comunes que indican la presencia de queratocono, como son
la protrusión evolutiva del tejido corneal en forma de cono y el adelgazamiento del
tejido en el área afectada. En base a estas caracterı́sticas comunes, y asumiendo
ciertas simplificaciones, se ha desarrollado un modelo de elementos finitos de córnea
con queratocono. La simplificación más significativa consiste en que, aunque el
queratocono se presenta en la región infero-temporal o infero-nasal de la córnea,
en el modelo desarrollado no se ha considerado el descentramiento del cono. La
Figura 6.35 muestra esta aproximación. El modelo simplificado permite determinar
los efectos absolutos de cada tratamiento analizado, independientemente de la particularidad de la morfologı́a de cada caso, para poder observar el efecto producido
de forma aislada y objetiva.
El vértice del cono, habitualmente llamado “thinnest” por ser el punto más
delgado de la córnea ectásica, presenta flaccidez y adelgazamiento. En la geometrı́a
desarrollada, este punto coincide con el ápex a causa de la simetrı́a de revolución. El
adelgazamiento del tejido depende del estado de evolución del queratocono, pudiendo
llegar al 75% del espesor [Gefen et al., 2009]. Se ha asignado un valor de 300 µm al
espesor apical.
El entorno del ápex se ha modelado como un área circular con centro en el ápex
de diámetro 4 mm. Este tejido presenta un espesor creciente, entre el espesor apical
y el correspondiente al tejido sano no adelgazado por la patologı́a. Aunque cada
caso presenta valores muy diferentes y es una patologı́a que presenta irregularidades
morfológicas difı́ciles de simplificar, se ha modelado el cono de esta forma, basándose
en estudios de Hayes et al. [2007b]. Las aproximaciones geométricas indicadas se
pueden observar en la Figura 6.35.
El mallado del modelo, dada la geometrı́a de revolución, se ha realizado por revolución, con mallado más fino en el área del queratocono. La malla consta de 7.840
elementos hexaédricos C3D8H y 10.155 nodos. En la Figura 6.36 (b) se muestra el
modelo de elementos finitos de queratocono desarrollado, en el que se reproduce a
Capı́tulo 6. Simulación numérica de tratamientos refractivos
245
Figura 6.36: Modelo de elementos finitos de córnea sana (izquierda) y de queratocono
(derecha), en el que se puede observar la protrusión en forma de cono.
forma de un cono con simetrı́a de revolución, causado por la protrusión del tejido
patológico debilitado y adelgazado. El ápex se sitúa en el eje óptico, alineado con el
centro de la pupila. La protrusión en forma de cono es apreciable en comparación
con el modelo esférico de córnea sana (Figura 6.36 (a)).
En el queratocono, las fibras de colágeno presentan orientaciones anormales, pero
se cree que no es la única causa de la degradación del tejido, pudiendo intervenir
también el deslizamiento entre lamelas [Hayes et al., 2007b].
La Figura 6.37 muestra, mediante un mapa vectorial, la orientación preferencial
de las fibras de colágeno en una córnea con queratocono obtenida mediante rayos X
por Hayes et al. [2007b]. La lı́nea negra continua indica el área de mayor elevación
corneal, y la lı́nea azul discontinua, el área de mayor adelgazamiento del tejido. Se
observa una distribución anormal de la orientación de las fibras de colágeno en el
área del cono, mientras que en zonas alejadas de él, el patrón de orientación es el de
una córnea sana (ver Capı́tulo 2).
Para modelar el comportamiento del tejido corneal sano, se le asignan los valores
de los parámetros indicados en el Capı́tulo 4 según el modelo propuesto de comportamiento hiperelástico cuasi-incompresible anisótropo. Al tejido del área del ápex,
de diámetro 0,4 mm, se le asigna un mismo valor de C1 , que representa el comportamiento de la matriz isótropa de sustancia fundamental; a los parámetros C3 y
C4 , que representan la anisotropı́a del tejido debida a la orientación de las fibras de
colágeno, se les asigna un valor nulo puesto que en este área la masa de colágeno está
muy disminuida respecto al resto de la córnea, y además existe entrecruzamiento
de las lamelas situadas a distintas profundidades y las orientaciones de las fibras de
colágeno no presentan una distribución preferencial coherente [Hayes et al., 2007b].
Modelado del ojo humano y tratamientos refractivos
246
Figura 6.37: Orientación preferencial de las fibras de colágeno en una córnea con
queratocono severo (K= 63,2 D) [Hayes et al., 2007b]. La lı́nea negra delimita el
área de mayor elevación de la superficie anterior corneal; la lı́nea discontinua azul
delimita el área de tejido adelgazado.
S, Max. Principal
(Avg: 75%)
+3.312e−02
+2.916e−02
+2.520e−02
+2.125e−02
+1.729e−02
+1.333e−02
+9.373e−03
+5.415e−03
+1.458e−03
−2.500e−03
−6.458e−03
−1.042e−02
−1.437e−02
U, Magnitude
+8.853e−06
+8.115e−06
+7.378e−06
+6.640e−06
+5.902e−06
+5.164e−06
+4.427e−06
+3.689e−06
+2.951e−06
+2.213e−06
+1.476e−06
+7.378e−07
+0.000e+00
Figura 6.38: Distribución de tensión máxima principal [MPa] (izquierda) y de desplazamientos [mm] (derecha) en el modelo de queratocono tras la introducción de las
tensiones iniciales para reproducir las condiciones fisiológicas, previa a la simulación
de los tratamientos.
Capı́tulo 6. Simulación numérica de tratamientos refractivos
247
El tejido circundante al ápex tiene propiedades intermedias entre el tejido sano y
el tejido del vértice del cono, por lo que se ha asignado a las propiedades de las
direcciones preferenciales de fibras de colágeno, C3 y C4 , valores intermedios entre
los de ambos tejidos.
Las condiciones iniciales y de contorno se imponen de forma análoga a los anteriores modelos, según se ha explicado previamente en el apartado 6.3, mediante
la estimación y posterior introducción en el modelo del tensor gradiente de deformación F 0 n que equilibra el valor de la PIO, carga aplicada a la superficie interior
del modelo, cuyo valor es 15 mmHg.
6.7.2
Implante de segmentos de anillos intraestromales
Los segmentos intraestromales de anillos corneales (ICRS) son implantes que se
utilizan para regularizar la morfologı́a corneal y estabilizar la córnea ectásica. Esta
técnica se describe en el Capı́tulo 3.
Los ICRS se fabrican en polimetilmetacrilato (PMMA), por ser un material inerte
y biocompatible. Sus propiedades de material son las siguientes: Módulo de Young
E= 3.300 MPa y Coeficiente de Poisson ν= 0,4. En las simulaciones que aquı́ se
presentan, este material se ha modelado como elástico lineal. La definición del
material de los segmentos, correspondiente a los grupos de elementos SEGMEN1 y
SEGMEN2, en el archivo de input para su cálculo mediante Abaqus [Hibbit et al.,
2005] se realiza de la siguiente forma:
*MATERIAL, NAME=PMMA
*ELASTIC, TYPE=ISOTROPIC
3300, 0.4
*SOLID SECTION, ELSET=SEGMEN1, MATERIAL=PMMA
*SOLID SECTION, ELSET=SEGMEN2, MATERIAL=PMMA
Se realiza un análisis por elementos finitos de la implantación de dos ICSR de
longitud 160o , sección de geometrı́a hexagonal y espesor 0,3 mm, insertados en zona
óptica de 5,4 mm. La simulación se lleva a cabo con el modelo de elementos finitos
descrito anteriormente. Bajo un valor de PIO de 15 mmHg, introducido como
carga uniformemente distribuida en la superficie interior del modelo en el primer
step de cálculo, se procede a simular la tunelización (step 2 y step 3) y posterior
inserción de los anillos (step 4). Las instrucciones de Abaqus v6.5 [Hibbit et al., 2005]
correspondientes son las siguientes: Eliminación de material en el seno estromal :
*MODEL CHANGE, TYPE= ELEMENT, REMOVE
QUITAR1, QUITAR2
Ampliación del hueco tunelado mediante desplazamientos impuestos, en coordenadas
cilı́ndricas, a los nodos que lo delimitan, estableciendo valores de desplazamiento con
248
Modelado del ojo humano y tratamientos refractivos
Figura 6.39: Distribución de desplazamientos (mm) en planta (izquierda) y corte
sagital (derecha) del modelo de queratocono tras el implante de ICRS.
Figura 6.40: Distribución de tensión principal máxima (MPa) en planta (izquierda)
y corte sagital (derecha) del modelo de queratocono tras el implante de ICRS.
componente radial y axial tal que el hueco adquiera las dimensiones suficientes para
alojar la sección del anillo. Dichos nodos forman los grupos UP y DOWN.
*BOUNDARY, OP=MOD
UP, 1, 1, 0.15
UP, 3, 3, 0.15
DOWN, 1, 1, 0.0
DOWN, 3, 3, 0.0
Finalmente, se introducen los segmentos en el hueco creado:
*MODEL CHANGE, TYPE=ELEMENT, ADD
SEGMEN1, SEGMEN2
Capı́tulo 6. Simulación numérica de tratamientos refractivos
249
Figura 6.41: Detalle de la distribución de tensión principal máxima (MPa) en un
corte sagital (derecha) del modelo de queratocono tras el implante de ICRS, en el
que se puede observar que la mayor concentración de tensiones se produce en el
entorno del implante.
Los resultados de la simulación se muestran en las Figuras 6.39, 6.40 y 6.41.
Se observa una concentración de tensiones en el seno estromal que rodea al anillo,
debida a la compresión que el implante ejerce sobre el tejido circundante que lo aloja.
También se observa la presencia de un gradiente de tensiones a lo largo del espesor
en la zona central de la córnea, en la cual, la parte más externa está sometida a
tracción y la interna, a compresión. Este efecto está producido por los anillos y se
traduce en un aplanamiento de dicha zona central de la córnea. El mismo efecto
se puede observar también en la distribución de desplazamientos en la dirección del
eje óptico (Figura 6.39, derecha), en la cual el desplazamiento negativo (hacia el
interior del ojo) del área central de la córnea y el positivo del tejido circundante a
los segmentos, indican que se produce aplanamiento en el área central corneal.
6.7.3
Tratamiento de cross-linking de colágeno corneal
El tratamiento de CXL del colágeno corneal se presenta también en el Capı́tulo
3. La simulación de este tratamiento se ha realizado mediante la modificación de
las propiedades de material del tejido corneal tratado.
El tratamiento de CXL hace más rı́gido el tejido. Según diversos estudios, se
estima que el aumento inducido en la rigidez del tejido varı́a según las especies: 85%
en conejos, 70% en cerdos y significativamente mayor, de un 320%, en humanos
[Wollensak et al., 2003b; Wollensak and Iomdina, 2009b]. Estos valores han sido
obtenidos en ensayos in vitro, mediante ensayos de tracción uniaxial. La cuantificación in vivo del incremento de rigidez que causa este tratamiento en la córnea
humana no ha sido documentada en la bibliografı́a.
El haz de luz UVA con el que se irradia la córnea para inducir el cross-linking de
colágeno tiene un diámetro de 9 mm. Puesto que el queratocono se ha modelado en
250
Modelado del ojo humano y tratamientos refractivos
Figura 6.42: Parámetros de material utilizados para el modelado del queratocono y
del tejido corneal sano, antes y después del tratamiento de CXL de colágeno.
un área circular de diámetro 4 mm, tras el tratamiento de CXL se distinguen dos
zonas concéntricas de tejido tratado, con distintas propiedades: el tejido afectado
por el queratocono, de diámetro 4 mm, y el anillo de tejido sano que rodea al
patológico, de anchura 2,5 mm, hasta un diámetro de 9 mm.
Para asignar valores a los parámetros de material de los distintos tejidos implicados tras el tratamiento de CXL de colágeno corneal, se ha aplicado el incremento
indicado para tejido humano de 300% basado en resultados experimentales, a los
parámetros de referencia de cada tejido: queratocónico y corneal sano.
Los valores de los parámetros asignados a cada tejido modelado se exponen en
la descripción del modelo, presentado en el apartado 6.2. Tras el tratamiento de
CXL se han estimado los nuevos parámetros, según el razonamiento que se ha dado
anteriormente, incrementando en un 300% el valor previo al tratamiento. Los valores correspondientes a los parámetros C1 , C3 y C4 correspondientes al modelo
de comportamiento hiperelástico de Holzapfel [2000] para estos casos se muestran
en la Tabla 6.14. Como se puede apreciar en las curvas de comportamiento de
la Figura 6.42, el tejido queratocónico tras la generación de enlaces de colágeno
mediante el tratamiento CXL presenta una rigidez algo superior a la del tejido sano
sin tratamiento.
Las distribuciones de tensiones y desplazamientos resultantes de la simulación
numérica del tratamiento de CXL de colágeno corneal se muestran en la figura 6.43.
El efecto de este tratamiento es la modificación de las propiedades de material del
tejido corneal; al estar sometido permanentemente a la PIO durante este cambio,
Capı́tulo 6. Simulación numérica de tratamientos refractivos
Tejido corneal
Sano
Sano con Tto. CXL
QC ápex
QC entorno ápex
QC con Tto. CXL
251
Parámetros de material
C1
C3
C4
0,1 0,234
29,917
0,3 0,702
89,751
0,1
0
0
0,1 0,115
15
0,3 0,345
45
Tabla 6.14: Valores de los parámetros de material para los diversos tejidos presentes
en la córnea queratocónica, antes y después de tratamiento de cross-linking del
colágeno corneal. Las curvas de comportamiento se muestran en la Figura 6.42.
Figura 6.43: Distribución de tensión principal máxima (MPa) (izquierda) y desplazamientos (mm) (derecha) en el modelo de queratocono tras tratamiento de CXL
de colágeno.
252
Modelado del ojo humano y tratamientos refractivos
Figura 6.44: Configuración deformada (azul) superpuesta a la indeformada
(naranja), que presenta morfologı́a cónica, tras el tratamiento de CXL sobre el
queratocono. Según los resultados de simulación numérica, la geometrı́a corneal se
deforma durante el tratamiento, logrando una moderada regularización de la morfologı́a corneal.
las tensiones se redistribuyen, causando un cambio en la morfologı́a y logrando
regularizarla. Este cambio morfológico es apreciable en la sección corneal mostrada
en la Figura 6.44. En ella se muestra en sección la configuración de la córnea
deformada, en azul, superpuesta a la indeformada, en verde. El cuerpo del cono se
incurva, adquiriendo una geometrı́a más próxima a la esférica.
La distribución de tensiones adopta una forma de rombo o diamante similar a la
que presenta la distribución de las fibras en mapas de anisotropı́a realizados según
la orientación preferencial de las fibras observada en mediciones por rayos X [Hayes
et al., 2007b]. Esto se debe a la simetrı́a del modelo, por lo que no incorpora las
irregularidades y asimetrı́as de un queratocono real.
6.7.4
Tratamientos combinados
La reproducción aislada de cada uno de los tratamientos presentados, la inserción
de ISCR y CXL de colágeno corneal, reproduce los efectos conocidos en cuanto a la
biomecánica de la córnea. La inserción de ICRS causa un aplanamiento de la zona
corneal central que delimitan. A nivel clı́nico, este aplanamiento viene marcado
por el valor de la miopı́a postoperatoria, pues está directamente relacionado con
la longitud axial del ojo. En la simulación numérica, este aplanamiento se puede
cuantificar como la disminución de la profundidad de cámara anterior (anterior
chamber depth, ACD), que es la distancia entre el endotelio y la cápsula anterior
Capı́tulo 6. Simulación numérica de tratamientos refractivos
ACD
K
Sim K
Preoperatorio
3,38 ±0,30
48,85 ±4,68
5,95 ±2,60
Postoperatorio
3,34 ±0,33
46,43 ±4,17
3,66 ±2,20
∆
-0,04
-2,42
-2,29
253
p
<0,05
<0,05
<0,05
Tabla 6.15: Los resultados clı́nicos reflejan la disminución de profundidad de cámara
anterior (ACD) causada por la cirugı́a de inserción de ICRS, que tiene un efecto
hipermetropizante, es decir, corrige la miopı́a.
del cristalino. Este hecho ha sido verificado posteriormente realizando el análisis
estadı́stico en pacientes, cuyo resultado se muestra en la Tabla 6.15. La creación de
enlaces de colágeno mediante tratamiento de CXL causa un incremento en la rigidez
del tejido, por lo que se produce una redistribución de las tensiones del tejido y
se modifica de forma moderada la geometrı́a corneal, regularizando su morfologı́a
(Figuras 6.43 y 6.44).
El tratamiento combinado de cross-linking de colágeno corneal y la inserción
de ICRS para el tratamiento del queratocono es un tema de elevado interés en la
investigación actual de la cirugı́a refractiva. Sin embargo, como se expone en el
Capı́tulo 3, no se ha llegado a un protocolo estándar en cuanto a la aplicación
combinada de ambas técnicas, por lo que la metodologı́a desarrollada puede ser de
interés para establecer dicho protocolo.
Las Figuras 6.45 y 6.46 muestran las distribuciones de tensiones y desplazamientos en el modelo de queratocono si se realiza un tratamiento de CXL y posteriormente se implantan dos ICRS similares a los descritos en el apartado anterior, y
el tratamiento realizado en orden inverso, es decir, si inicialmente se realiza la implantación los segmentos y posteriormente se aplica el tratamiento de CXL.
Cualitativamente se observan los mismos efectos que la inserción de ICRS, es decir, hipermetropización y aplanamiento. Para cuantificar el efecto de aplanamiento,
se considera la disminución provocada en la ACD. En la Figura 6.47 aparece en
sección la configuración indeformada de la córnea con queratocono, en amarillo,
superpuesta a la configuración deformada tras la inserción de los ICRS, en azul.
Se observa una disminución de la profundidad de cámara anterior (ACD) asociada
al efecto de aplanamiento de los implantes, indicada por valores negativos de los
desplazamientos. El nodo en rojo, situado en el centro del endotelio, se desplaza
hacia el interior, 5,634×10−2 mm, que es la medida en la que disminuye la ACD.
La medida en que disminuye la ACD en los tres casos de inserción de ICRS son:
-0,056 mm, en el caso de tratamiento aislado con ICRS; -0,237 mm, si se realiza un
tratamiento de CXL previo a la inserción de implantes; -0,045 mm, si se aplica el
tratamiento de CXL posteriormente. Los valores de tensión principal máxima, en
esos casos, son: 0,1501 MPa, 2 MPa y 0,03 MPa, respectivamente; el valor máximo
corresponde al caso de implante de ICRS con tratamiento previo de CXL, caso en
254
Modelado del ojo humano y tratamientos refractivos
Figura 6.45: Distribución de tensión principal máxima (MPa) (izquierda) y desplazamientos (mm) (derecha) en el modelo de queratocono tras tratamiento de CXL
de colágeno corneal y posterior inserción de ICRS. Las concentraciones de tensiones
aparecen en el tejido corneal del entorno de los implantes.
Figura 6.46: Distribución de tensión principal máxima (MPa) (izquierda) y desplazamientos (mm) (derecha) en el modelo de queratocono tras la inserción de ICRS y
posterior tratamiento de CXL de colágeno.
Capı́tulo 6. Simulación numérica de tratamientos refractivos
255
Figura 6.47: La figura representa la geometrı́a del queratocono (en amarillo) antes
del implante de ICRS y la deformada (en azul) tras el implante. Se observa una
disminución de la profundidad de cámara anterior (ACD) asociada al efecto de
aplanamiento de los implantes. El nodo rojo, situado en el centro del endotelio, se
desplaza hacia el interior 5,634×10−2 mm, que es la medida en la que disminuye la
ACD.
el que los segmentos se implantan en un tejido mucho más rigido que el de la córnea
sin tratamiento previo. La mayor disminución de ACD y el mayor valor de tensiones
se producen en el mismo caso, que es el tratamiento de CXL previo a la inserción
de ICRS. Esto significa que es el que mayor efecto de aplanamiento y aporte estructural al tejido, por lo que debe ser la opción más acertada desde el punto de vista
biomecánico para la aplicación de estos dos tratamientos de forma combinada.
6.7.5
Discusión
Se han realizado simulaciones de la inserción de dos segmentos intraestromales
enfrentados en combinación con el tratamiento de cross-linking de colágeno corneal.
Tras la simulación, los resultados son similares a los observados clı́nicamente,
mostrados en la Tabla 6.15. La inserción de ICRS induce una aplanación del área
central corneal causando un efecto hipermetropizante. El proceso de CXL causa
mayor rigidez en el tejido débil y fláccido, aumentando su fortaleza estructural y
confiriendo mayor solidez a la morfologı́a corneal.
La combinación de las dos técnicas de tratamiento conduce a una regularización
de la córnea patológica, en cuanto a morfologı́a (recuperación en parte de la forma
degenerada por la protusión del cono) y respecto a la biomecánica (comportamiento
del tejido corneal). Por tanto, se espera que con la combinación de ambas técnicas
se logre estabilizar el astigmatismo irregular y retrasar la evolución de la patologı́a.
256
Modelado del ojo humano y tratamientos refractivos
Según los resultados biomecánicos, se logra un mayor efecto en el caso de combinar las técnicas de inserción de ICRS y tratamiento de CXL que realizando cada
uno de ellos de forma aislada, por lo que la combinación de ambos tratamientos es
recomendable desde el punto de vista biomecánico. La disminución de ACD causada
por la inserción de ICRS es mayor si se realiza previamente un tratamiento de CXL
que haya aumentado la rigidez del tejido.
El mayor valor de tensión se produce en el caso de aplicación del tratamiento de
CXL y la posterior inserción de los ICRS. Esto se debe a que el tejido tratado con
CXL es más rı́gido, por tanto ofrece más resistencia a la inserción de los segmentos.
Esto causa cierta oposición por parte de algunos cirujanos oftalmólogos, pues ven
en el material endurecido por el tratamiento de CXL una dificultad añadida a la
cirugı́a de implantación de ICRS [Cezón, 2009]. Sin embargo, su experiencia podrı́a
suplir con creces esta dificultad, si se demostrara clı́nicamente la indicación de los
resultados biomecánicos obtenidos, adoptándose esta secuencia como la combinación
más efectiva de los dos tratamientos.
Puesto que el efecto logrado por la inserción de ICRS es mayor si se ha practicado
previamente el tratamiento de CXL (menor ACD, mayor valor de tensiones) los
resultados de simulación numérica proponen que la técnica de inserción de ICRS
tendrı́a menor efecto en casos de queratocono avanzado, debido a que el tejido está
más debilitado. Sin embargo, se debe indicar que los tratamientos de ICRS y sobre
todo, de CXL, no están aún adaptados al estado de avance de queratocono, por lo
que debe seguirse investigando con el fin de lograr optimizar los parámetros de los
tratamientos para cada estadio de la patologı́a o, idealmente, para cada paciente.
Los estudios clı́nicos deben, a su vez, marcarse como objetivo la acotación de los
riesgos y optimizar el protocolo de actuación de esta combinación de tratamientos
para el queratocono.
6.8
Caracterización in vivo de la viscoelasticidad
del tejido corneal: ORA.
La aparición reciente del aparato Ocular Response Analizer, Reichert Ophthalmic
Instruments, Inc., Depew, New York, en adelante ORA, cuyo funcionamiento se
describe en el Capı́tulo 2, permite estudiar el comportamiento del tejido corneal in
vivo.
El aparato proporciona valores de diversos parámetros que caracterizan la rigidez
y elasticidad del material, de los cuales la Histéresis Corneal (CH) y el Factor de
Resistencia Corneal (CRF) son los más relevantes. Se propone a continuación un
método para determinar la viscoelasticidad del tejido corneal humano in vivo a
partir de las medidas de CH y CRF tomadas por el ORA.
Capı́tulo 6. Simulación numérica de tratamientos refractivos
6.8.1
257
Simulación de la medida realizada por ORA
El modelo de elementos finitos utilizado para esta simulación es el de geometrı́a
esférica que ha sido presentado en el apartado 6.1.2. Previamente a la simulación,
se reproducen las condiciones fisiológicas y se imponen las condiciones de contorno
como se indica en el apartado 6.3.
Para llevar a cabo la simulación de la medición de los parámetros CH y CRF,
se ha utilizado una subrutina de usuario para material viscohiperelástico correspondiente al modelo descrito en el Capı́tulo 5. El cálculo se realiza con Abaqus v6.5
[Hibbit et al., 2005] y consta de dos steps. El primer step consiste en la aplicación
de la PIO de valor 15 mmHg. En el segundo step, en presencia del mismo valor
de PIO, se introduce una carga CHAIRE en dirección opuesta al eje óptico (0,0,-1)
que representa el chorro de aire de 3 mm de diámetro incidente sobre la superficie
anterior corneal. Los elementos que componen el área central corneal dentro de
un diámetro de 3 mm constituyen el grupo HIST, siendo su cara externa la que
recibe la presión del aire. El valor de dicha carga sigue una distribución en forma
de campana, alcanzando un valor máximo a 10 ms del comienzo del proceso, siendo
20 ms la duración total. El valor máximo de la carga Pmaxima no se ha dado a
conocer por la empresa que comercializa el aparato, únicamente que dicho valor es
función de P1 (presión correspondiente al primer aplanamiento). Puesto que las
especificaciones del equipo indican un valor máximo de presión de pulso de aire de
60 mmHg, se puede acotar dicho valor máximo, considerando que se encuentra en el
rango establecido entre la presión fisiológica y el valor máximo, es decir, entre 10 y
60 mmHg. La curva en forma de campana introducida se ha escalado de forma que
su valor máximo sea 1, con el fin de poder realizar simulaciones a distintos valores
de Pmaxima con sólo modificar el valor de la amplitud de la carga.
*AMPLITUDE, NAME=CHAIRE
0.0, 0.0, 7.0, 12.5E-02, 9.5, 25.0E-02, 10.5, 37.5E-02
11.5, 0.5, 12.0, 62.5E-02, 12.5, 75.0E-02, 13.5, 87.5E-02
14.0, 94.0E-02, 14.5, 99.0E-02, 15.0, 1.0,15.5, 99.0E-02
16.0, 94.0E-02, 16.5, 87.5E-02, 17.5, 75.0E-02,18.0, 62.5E-02
18.5, 0.5, 19.5, 37.5E-02, 20.5, 25.0E-02, 23.0, 12.5E-02
25.0,0.0
...
*DLOAD
PRESION2D, P, 2.33E-3
*DLOAD, AMPLITUDE=CHAIRE
HIST-F1, TRVEC1, 2E-3, 0, 0, -1
La Figura 6.49 muestra varios instantes de la simulación del proceso de aplicación
del impulso de aire (step 2, compuesto de 40 frames). Los desplazamientos en la
zona central de la córnea van aumentando según aumenta la presión ejercida por
258
Modelado del ojo humano y tratamientos refractivos
Figura 6.48: La curva verde de la imagen izquierda representa la presión (sin indicar
la dimensión) ejercida por el chorro de aire durante el proceso de medición del
aparato. La derecha muestra los puntos considerados para establecer la carga en
función del tiempo, escalado a un valor máximo de 1, siendo el proceso completo de
20 ms.
el aire, hasta alcanzar un máximo en 8,908·10−1 mm, momento en que el tejido
comienza la recuperación de su morfologı́a, desplazándose hacia el exterior.
6.8.2
Metodologı́a para la estimación de los parámetros de
viscoelasticidad in vivo
El valor de histéresis corneal CH corresponde a la diferencia de las presiones
en los aplanamientos de entrada y salida, CH = P1 − P2 . El valor del factor de
resistencia corneal CRF se estima como: CRF = P1 − (0, 7 × P2 ) [Kotecha et al.,
2006]. De esta forma, durante la medida de los parámetros CH y CRF del paciente
se obtienen las presiones de aplanamiento, P1 y P2 .
Para proceder al ajuste de los parámetros de viscoelasticidad, γ y τ , correspondientes a la matriz y fibras que componen la estructura corneal, se van a realizar
ciertas simplificaciones, pues en principio deberı́an estimarse ocho parámetros (cua1
2
1
2
tro para la matriz y cuatro para las fibras: γm
, γm
, τm
, τm
, γf1 , τf1 , γf2 , τf2 ) que
constituyen un número de variables demasiado elevado para ser ajustadas con dos
únicos parámetros de referencia (P1 y P2 ).
En el Capı́tulo 5 se ha presentado la estimación de los parámetros de viscoelasticidad a partir de ensayos realizados en laboratorio. Se utilizaba un modelo de
Kelvin con N = 2, por lo que la matriz se caracterizaba mediante dos conjuntos
2
1
2
1
. Aquı́ se tomará un único conjunto (N = 1) γm ,
y τm
, τm
, γm
de parámetros, γm
τm . Se realizará, a su vez, la hipótesis de que ambas familias de fibras presentan las
mismas propiedades viscoelásticas, por lo que γf1 = γf2 = γf y τf1 = τf2 = τf . De esta
forma el número de parámetros por determinar se reduce a cuatro: γm , τm , γf , τf .
El proceso de obtención de los parámetros consiste en optimizar el error cometido
en las presiones de aplanamiento P1 y P2 , mediante simulaciones sucesivas de la
toma de medidas del paciente, según se describe en el apartado anterior (6.8.1),
Capı́tulo 6. Simulación numérica de tratamientos refractivos
259
Figura 6.49: Proceso de simulación de la medida de CH y CRF por el ORA. Se muestra la distribución de desplazamientos en la región central corneal, produciéndose
un movimiento hacia el interior, seguido de la recuperación del tejido con desplazamientos hacia el exterior.
260
Modelado del ojo humano y tratamientos refractivos
modificando los valores asignados a los parámetros por estimar (γm , τm , γf , τf ) en
el sentido adecuado, puesto que γ representa “cuánto” se relaja el tejido, y τ el
tiempo de relajación.
La estimación de los parámetros correspondientes al modelo de Kelvin con N = 2,
1
2
1
2
es decir, γm
, γm
, τm
, τm
, γf1 , τf1 , γf2 , τf2 , es compleja debido al alto número de
parámetros por estimar a partir de un único punto de medida de aplanamiento
corneal, el punto central. Serı́a necesario obtener un registro de los desplazamientos
de diversos puntos de la superficie anterior corneal durante el proceso de medida
de CH. La reproducción mediante simulación numérica de dicho proceso permitirı́a
entonces determinar, mediante un análisis inverso, los valores óptimos para dichos
parámetros. Sin embargo, en la actualidad ningún aparato comercial proporciona
esta información.
Capı́tulo 7
Simulación de la acomodación y
estudio de la presbicia
7.1
Introducción
El mecanismo de acomodación y su declive gradual con la edad es objeto de
continuo interés en la investigación clı́nica y biomédica. Según se expone en el
Capı́tulo 2, una de las principales dificultades para su estudio y modelado es la
falta de acuerdo sobre su mecanismo fisiológico, dando lugar a diversas teorı́as [von
Helmholtz, 1924; Schachar et al., 1993; Coleman, 1970]. En este trabajo se aplica la
teorı́a de Helmholtz, por ser la de mayor aceptación. Ensayos realizados por diversos
autores, ex vivo [Glasser and Campbell, 1998] e in vivo [Brown, 1973; Koretz et al.,
2002; Dubbelman et al., 2005], parecen confirmar que la teorı́a de Helmholtz es la
más realista de entre las propuestas.
Con este fin se plantea una metodologı́a para la reproducción computacional del
mecanismo de acomodación del ojo humano. Se presenta un modelo paramétrico de
cristalino humano, capaz de reproducir la geometrı́a correspondiente a una edad y
estado de acomodación determinados. El modelo de elementos finitos del cristalino
humano se ha desarrollado con dos objetivos concretos: por una parte, estimar las
fuerzas ciliares que actúan durante el proceso de acomodación; por otra, suponiendo
que ese valor de las fuerzas no se modifica con la edad [Hermans et al., 2008],
determinar las propiedades de material que presentan los tejidos a diferentes edades.
En esta tesis, a modo de ejemplo, se han considerado las edades de 40 y 50 años. Las
geometrı́as de los modelos correspondientes a cada edad y estado de acomodación
se han tomado de bibliografı́a, según se indica en el Capı́tulo 5.
7.2
7.2.1
Modelo paramétrico de cristalino humano.
Modelo geométrico paramétrico.
El cristalino humano es uno de los órganos más difı́ciles de modelar, no tanto
por la complejidad de su geometrı́a, sino por su capacidad de modificar su potencia
261
262
Modelado del ojo humano y tratamientos refractivos
óptica según los requerimientos de visión. El modelado de este órgano debe considerar el cambio dióptrico asociado al proceso de acomodación entre los estados
acomodado y desacomodado (configuraciones indeformada y deformada, respectivamente, si se sigue la teorı́a de Helmholtz) para enfocar objetos cercanos y lejanos,
respectivamente. La edad es también un factor que debe tenerse en cuenta en el
modelado biomecánico del cristalino, ya que no sólo modifica la geometrı́a de ambos
estados al aumentar el tamaño del cristalino por el crecimiento continuado de capas
externas de fibras, sino que también introduce cambios en la capacidad acomodativa y por lo tanto, en el rango dióptrico de acomodación, que disminuye de forma
asociada a la edad.
En los modelos paramétricos, la geometrı́a queda caracterizada por un cierto
número de parámetros, debiendo considerarse el menor número de parámetros que
sea capaz de realizar una descripción realista y fiel del objeto de estudio [Navarro
et al., 2005]. En el presente trabajo se ha desarrollado un modelo paramétrico
de cristalino humano, en el que los dos parámetros son la edad y el estado de
acomodación, determinado como las dioptrı́as de acomodación: cero dioptrı́as en el
estado completamente desacomodado, y el máximo de rango dióptrico acomodativo,
determinado por la edad, en el estado totalmente acomodado.
Geometrı́a externa
La Figura 7.1 muestra un esquema de la geometrı́a básica del cristalino utilizada
en esta tesis. Para su desarrollo se ha utilizado el método propuesto por Hermans
et al. [2008], que consiste en representar las curvaturas anterior y posterior en el
entorno del eje óptico según modelos ópticos, con el fin de reproducir las propiedades
refractivas, y adaptar el radio ecuatorial a las medidas estimadas correspondientes
a la edad y estado de acomodación. La principal diferencia con dicho autor es la
utilización en nuestro modelo de una superficie cónica en lugar de un plano como
superficie central divisoria entre las partes anterior y posterior del cristalino. Como
resultado, los ecuadores de núcleo y cortex recaen sobre planos diferentes, como
demuestran recientes resultados experimentales [Jones et al., 2005].
A diferencia del modelo desarrollado por Hermans, las superficies externas del
cristalino en nuestro modelo se han construido mediante la unión de tres partes,
como resultado de la combinación de diversas medidas experimentales de las zonas
central [Dubbelman and van der Heijde, 2001] y ecuatorial [Schachar et al., 1993].
La parte intermedia ha sido estimada mediante interpolación con el fin de garantizar
continuidad en las superficies.
La parte central de las superficies anterior y posterior z1 , en rojo en la Figura
1, es una cónica con simetrı́a de revolución (ecuación 7.1), siendo C1 la curvatura y
Q1 la constante cónica.
z1 = z0 +
C 1 x2
p
1 + 1 − (Q1 + 1)C12 x2
(7.1)
Capı́tulo 7. Simulación de la acomodación y estudio de la presbicia
263
Figura 7.1: Parámetros de la geometrı́a del cristalino utilizados para definir el modelo de elementos finitos.
De acuerdo a Schachar et al. [1993] el contorno ecuatorial z3 , representado en
verde en la Figura 1, se modela como un arco de circunferencia de radio re (ecuación
7.2) que conecta las superficies anterior y posterior y se posiciona en el ecuador de
acuerdo al radio del cristalino Rlens , estimado previamente.
z3 =
p
re2 − (x − Rlens + re )2
(7.2)
Según Schachar et al. [1993], la proporción entre re y Rlens es un valor constante
( Rlens = 0.1208), ası́ como los valores de los ángulos anterior y posterior que definen
la longitud del arco ecuatorial: (θant = 63o , θpos = 37o ).
re
La parte central del cristalino z1 y el contorno ecuatorial z3 deben unirse para
completar la geometrı́a externa. Las curvas z2 (en azul en la Figura 7.1) son cónicas
diseñadas para garantizar continuidad con las curvaturas central y ecuatorial, y se
corresponden con la siguiente expresión (ecuación 7.3):
z2 = z0 +
C2 x2
p
1 + 1 − (Q2 + 1)C22 x2
(7.3)
Los puntos de conexión se etiquetan como P1 entre las curvas z1 y z2 , y P2 entre
las curvas z2 y z3 . Según Hermans et al. [2008], P1 se sitúa en x=2,5 mm en la parte
anterior y en x=2 mm en la posterior. Como se ha explicado previamente, P2 se
posiciona según θant y θpos [Schachar et al., 1993]. Los valores calculados para C2,ant
y Q2,ant son 0,1021 y 1,1302, respectivamente. Las expresiones utilizadas para z2,pos ,
Q2,pos y C2,pos se obtienen de forma similar a z1,ant , Q1,ant y C1,ant . Dichos valores
fueron 0,0036 y 53,5284 para C2,pos and Q2,pos , respectivamente.
264
Modelado del ojo humano y tratamientos refractivos
Nuestro modelo introduce una mejora con respecto a la geometrı́a propuesta por
Hermans. La interfaz entre las mitades anterior y posterior del cristalino no corresponde en la realidad a un plano sino a una superficie cónica [Jones et al., 2005].
En nuestro modelo se ha considerado una cónica como superficie ecuatorial según
propuso Navarro et al. [2007a]. A partir de esta curva se obtuvo una superficie
cuadrática de revolución.
Las interfaces entre núcleo y cortex, anterior y posterior, se suponen concéntricas
a las superficies externas del cortex. No se utilizan redondeos ecuatoriales para el
núcleo. El espesor total del cristalino, T T , se determina mediante el espesor de
la mitad anterior tant y el de la mitad posterior tpos . La Figura 7.1 muestra estos
parámetros, ası́ como el espesor de cortex anterior ACT , espesor de cortex posterior
P CT y el espesor del núcleo N T , como la suma de el espesor de núcleo anterior
AN T y espesor de núcleo posterior P N T .
Rosen et al. [2006] estimó que hay una proporción de 0,7 entre los espesores
anterior y posterior, medidos como las distancias desde los polos anterior y posterior
al ecuador. Este factor, junto con la expresión para el espesor total del cristalino
T T que se muestra en la Tabla 7.1, se utilizó para calcular el espesor de núcleo y
cortex a diferentes edades y estados de acomodación.
Edad y acomodación
El modelo geométrico que se ha descrito es paramétrico respecto a la edad, es
decir, permite establecer la geometrı́a del cristalino (córtex y núcleo) para una edad
determinada. Para ello, se deben particularizar todos los parámetros correspondientes a la edad de interés. Para la geometrı́a externa, se ha utilizado las expresiones
de Dubbelman et al. [2005] según se muestra en la Tabla 7.1, en la que A es la
edad en años y D representa el cambio de dioptrı́as que se produce en el proceso de
acomodación.
Para la amplitud de acomodación se ha utilizado la ley empı́rica propuesta por
Weale [1992] (ecuación 7.4) la cual asigna la máxima respuesta de acomodación, en
dioptrı́as, a cada edad.
D = 15 − 0, 25A
(7.4)
Esta expresión indica que la amplitud de acomodación disminuye a un ritmo
de 0.25 D por año, prediciendo una acomodación de 0 D al llegar a la edad de 60
años. Este hecho ha sido verificado posteriormente por otros autores [Glasser and
Campbell, 1998].
El diámetro ecuatorial del cristalino humano no se puede medir in vivo, pues
el ecuador del cristalino permanece oculto tras el iris, ası́ que se utilizaron datos
tomados de bibliografı́a de medidas in vitro. De acuerdo a la teorı́a de Helmholtz, y
como sugieren los estudios experimentales, se ha supuesto que el cristalino in vitro
está libre de las fuerzas que el cuerpo ciliar ejerce sobre él, y se corresponde con la
configuración del estado totalmente acomodado. En este estudio se han utilizado
Capı́tulo 7. Simulación de la acomodación y estudio de la presbicia
Cant [mm]−1
Qant
Cpos [mm]−1
Qpos
ACT [mm]
N T [mm]
P CT [mm]
T T [mm]
Rnucleo [mm]
Rlens [mm]
Función de Regresión
(12, 7 − 0, 058A)−1 + 0.0077D
−4 − 0, 5D
(5, 90 − 0, 013A)−1 + 0, 0043D
-3
0, 51(±0, 04) + 0, 0116(±0, 007)A + 0, 0040D
2, 11(±0, 04) + 0, 0030(±0, 001)A + 0, 0400D
0, 33(±0, 04) + 0, 0082(±0, 007)A + 0, 0006D
2, 95 + 0, 0228A + 0, 045D
D
)
3, 05 + (0, 5542 − 0, 0091A)(1 − 15−0,25D
0, 0069(±0, 001)A + 4, 35(±0, 07)
7, 5D
0,14899
-7,75
0,21374
-3
0,89
2,49
0,58
3,96
3,05
4,56
265
0D
0,09124
-4
0,18149
-3
0,87
2,19
0,57
3,63
3,33
4,84
∆
0,5775
-3,75
0,3225
0
0,02
0,3
0,01
0,6
-0,28
0,28
Tabla 7.1: Parámetros geométricos del cristalino en función de la edad A, en años,
y del rango de dioptrı́as de acomodación D [Dubbelman et al., 2003, 2005; Brown,
1973] y valores asignados a dichos parámetros para el modelo correspondiente a la
edad de 30 años en los estados totalmente acomodado y desacomodado (columnas
de la derecha). Delta (∆) indica el incremento.
datos medidos por Rosen et al. [2006] de 37 cristalinos correspondientes a edades
comprendidas entre 20 y 99 años, obteniendo la ecuación de regresión empı́rica para
Rlens que se muestra en la Tabla 7.1.
Strenk et al. [1999] determinó el máximo desplazamiento del ecuador de la lente
en función de la edad. Se apreció un declive gradual de dicho desplazamiento máximo
con la edad con la consiguiente disminución de la amplitud de acomodación. Se han
utilizado los valores de dicho autor para estimar el valor de 4Rlens mostrado en la
Tabla 7.1.
Geometrı́a del núcleo
Para la diseñar la geometrı́a del núcleo se utilizaron datos in vivo de Dubbelman
et al. [2003]. Este autor observó que el crecimiento del cortex con la edad es mucho
mayor que el del núcleo, lo cual coincide con el continuo crecimiento de nuevas fibras
en la capa más externa de la superficie del cortex. Sus resultados se muestran en la
Tabla 7.1. A la vista de sus resultados, se dedujo que el espesor del cortex, tanto anterior como posterior, no cambia apreciablemente con la acomodación. Como consecuencia, el cambio observado en el espesor total del cristalino se debe prácticamente
en su totalidad al núcleo. Si se comparan las proporciones de cambio de N T (0.04
mm/D) y de T T (0.045 mm/D) resulta que CT permanece prácticamente constante.
Para establecer la geometrı́a del núcleo se tomó el valor medido por Brown [1973]
para el radio periférico del cristalino. Para finalizar, se utilizaron dos curvas anterior
y posterior para el diseño de la interfaz córtex-núcleo, desde las curvas centrales
hasta el punto de la superficie media indicado por el radio del núcleo. Se siguió un
Modelado del ojo humano y tratamientos refractivos
266
proceso similar al explicado para la geometrı́a externa de la lente, aunque para el
modelado del núcleo no se estableció ningún redondeo ecuatorial.
Espesor de la cápsula
El espesor capsular varı́a con la posición radial y aumenta con la edad [Fincham,
1937; Fisher and Pettet, 1972]. Fisher y Pettet [Fisher and Pettet, 1972] estimaron
el espesor capsular de cristalinos humanos correspondientes a diferentes edades, 22,
37 y 47 años, medido en micras y tomado sobre la superficie capsular, con origen el
ecuador (Figura 7.2).
Figura 7.2: Medidas de espesor capsular a distintas edades tomadas por Fisher and
Pettet [1972].
Basándose en las medidas de Fisher, Burd et al. [2002] propuso polinomios de
quinto grado (ecuación 7.5) para estimar el espesor capsular en función de la distancia al ecuador, ajustando los coeficientes para cada edad. La Figura 7.3 muestra
los parámetros utilizados.
Espesor(µm) = a + b · η + c · η 2 + d · η 3 + e · η 4 + f · η 5
(7.5)
De esta forma, para la superficie anterior de la cápsula (−1 < η < 0), el valor de
η = −s/sa donde s es la distancia medida a largo del perfil de la curvatura anterior
de la lente y sa es el valor de s en el polo anterior, y para la superficie posterior de
Capı́tulo 7. Simulación de la acomodación y estudio de la presbicia
(a) Definición de la variable η.
267
(b) Medidas de espesor capsular para las
edades de 30, 40 y 50 años.
Figura 7.3: Variación del espesor capsular en función de su posición relativa al
ecuador.
la cápsula (0 < η < 1), η = s/sp donde s es la distancia medida a largo del perfil
de la curvatura posterior de la lente y sp es el valor de s en el polo posterior. Para
reproducir el espesor capsular del cristalino a diferentes edades medido por Fisher,
basta con interpolar los valores de los coeficientes.
EDAD
20 años
29 años
50 años
a
18.4513
21.1281
20.8296
b
-6.2115
-5.7352
-21.5153
c
-30.5628
-32.2456
-19.9900
d
3.2279
-2.4825
32.0542
e
16.8491
17.4894
7.6268
f
0.8222
4.7970
-16.4690
Tabla 7.2: Valores de los coeficientes de la función polinómica para el cálculo del
espesor de la cápsula.
El espesor de la cápsula anterior es mayor que el de la posterior, y ambos aumentan con la edad. Para el modelo de 30 años de edad, el espesor capsular se consideró
de 10.87 µm en el polo anterior, aumentando hacia la zona ecuatorial hasta un valor
de 20 µm, y disminuyendo hacia el polo posterior hasta alcanzar un valor de 3.159
µm. En el modelo de 40 años, los valores asignados para los polos anterior y posterior fueron 13.37 µm y 3.454 µm, respectivamente, y para el modelo de 50 años,
15.88 µm y 3.75 µm. Los coeficientes del polinomio utilizados para cada edad se
recogen en la Tabla 7.2.
7.2.2
Modelo de Elementos Finitos.
La Figura 7.4 muestra el proceso seguido para obtener el modelo de elementos
finitos del cristalino a partir de los parámetros geométricos anteriormente expuestos.
Modelado del ojo humano y tratamientos refractivos
268
(a)
(b)
(c)
Figura 7.4: Desarrollo del modelo tridimensional de elementos finitos del cristalino
a los 30 años de edad. El modelo se compone de cápsula, córtex y núcleo (a)
Modelo bidimensional del cristalino. La geometrı́a en el estado acomodado (rojo) se
superpone a la del estado totalmente desacomodado (azul). (b) Superficies obtenidas
por revolución alrededor del eje óptico. (c) Modelo de elementos finitos.
El contorno bidimensional (Figura 7.4(a)) correspondiente a cada edad de interés,
30, 40 y 50 años, fue obtenido utilizando el software comercial MATLAB y utilizado
como geometrı́a de base para el mallado mediante el software I-DEAS v.9. De
esta forma, se obtienen las superfices de revolución alrededor del eje óptico (Figura
7.4(b)) y posteriormente, se crea el volumen tridimensional de elementos finitos
(Figura 7.4(c)).
El modelo obtenido de elementos finitos se compone de 24.000 elementos sólidos
hexaédricos C3D8H, de los cuales 12.000 corresponden al córtex y los restantes
12.000, al núcleo. La cápsula se modela de forma independiente y está compuesta
por 2.000 elementos membrana M3D4 de espesor variable, según se ha expuesto en
el apartado anterior, asignando un valor de espesor a cada elemento capsular según
su posición radial. La malla utilizada en la simulación se muestra en la Figura 7.4,
en la cual la parte roja corresponde al núcleo, la gris al córtex y la púrpura a la
cápsula.
Capı́tulo 7. Simulación de la acomodación y estudio de la presbicia
7.3
269
Hipótesis
Para poder realizar un modelo adaptativo del cristalino, cuya geometrı́a y propiedades correspondan con las determinadas por otros autores, se han realizado algunas
hipótesis que se indican a continuación.
1. Se supone válida la teorı́a acomodativa de von Helmholtz [1924]. Por tanto el
cristalino, en su estado acomodado (visión cercana), está libre de las tensiones
generadas por la relajación del músculo ciliar y transmitidas a través de la
zónula. Es decir, se considera que las fuerzas de acomodación no actúan en
este estado [Burd et al., 2002].
2. Se considera que la presbicia está originada en su mayor parte por la disminución progresiva de elasticidad de los tejidos que componen el cristalino, es
decir, se desprecian los factores extra-lenticulares. Si bien es cierto que esta
patologı́a no es atribuible a una única causa, la imposibilidad de determinar in
vivo la responsabilidad de cada factor de forma aislada justifica su estimación
mediante simulación numérica [Burd et al., 2002].
3. La reducción de la movilidad del músculo ciliar con la edad no disminuye la
magnitud de la fuerza ejercida por la zónula. La capacidad de contracción de
dicho músculo a lo largo de la vida se considera aquı́ invariable [Strenk et al.,
2005]. Esta reducción de movilidad se produce en edades muy avanzadas.
4. Se asigna valor nulo al desplazamiento global del cristalino en la dirección
del eje óptico durante el proceso de acomodación simulado. De esta forma se
puede imponer la condición de que la resultante de las componentes de las
fuerzas ciliares en dicha dirección ha de ser nula [Hermans et al., 2006].
5. La geometrı́a real de el cristalino acomodado in vivo no coincide con exactitud
con la geometrı́a medida in vitro al ser separado de la zónula y observado de
forma aislada. Sin embargo, las medidas in vivo existentes en la bibliografı́a
conllevan ciertos errores de medida, por lo que se supone que ambas configuraciones coinciden en forma y dimensiones [Manns et al., 2004].
6. Se realiza la hipótesis de que las propiedades elásticas del tejido capsular permanecen constantes con la edad, dentro del rango de deformaciones que se
producen durante la acomodación, menos de un 10% [Krag et al., 1997; Krag
and Andreassen, 2003a,b].
7. Los tejidos del córtex y del núcleo pierden propiedades elásticas con la edad,
es decir, se hacen más rı́gidos [Heys et al., 2004; Weeber et al., 2007]. Además,
son materiales prácticamente incompresibles, al estar formados en su mayor
parte por agua [Ljubimova et al., 2007].
270
7.4
Modelado del ojo humano y tratamientos refractivos
Cargas y condiciones de contorno
Para establecer las condiciones de contorno se realizaron ciertas aproximaciones.
Como se ha expuesto anteriormente, se adopta la teorı́a de von Helmholtz [1924], asumiendo que en el estado totalmente acomodado el cristalino está libre de tensiones.
Es decir, las fuerzas que ejerce el músculo ciliar sobre el cristalino, transmitidas
por la zónula de Zinn, modifican su geometrı́a aplanando las superficies anterior y
posterior y alcanzado ası́ el estado desacomodado. La traslación del cristalino a lo
largo del eje óptico (coincidente con su eje geométrico de revolución) causada por
el movimiento antero-posterior del músculo ciliar es despreciable para el alcance
de este estudio, pues todos los órganos implicados se desplazan conjuntamente, no
habiendo desplazamientos relativos entre ellos.
Las condiciones de contorno impuestas al modelo de elementos finitos son las
siguientes:
• Los nodos situados a lo largo del eje óptico sólo pueden moverse a lo largo de
dicha dirección, teniendo impedidos los desplazamientos radiales o azimutales.
• Los nodos situados en el ecuador tienen impedidos los movimientos a lo largo
del eje óptico.
• Para obtener una configuración final en equilibrio estático y, por tanto, el
movimiento antero-posterior (en dirección axial) sea nulo, la suma de las componentes axiales de las fuerzas debe ser nula [Hermans et al., 2006].
Las fibras de la zónula, aunque no han sido incluidas como tales en el modelo,
han sido consideradas para establecer el área de aplicación y la orientación de las
fuerzas ciliares sobre la superficie de la cápsula donde se insertan dichas fibras.
El área de aplicación de las fuerzas consta de tres bandas: anterior, ecuatorial y
posterior [Glasser and Kaufman, 1999]. La banda ecuatorial se centra en el ecuador
del cristalino; la banda anterior está ubicada sobre la cápsula anterior a 1,5 mm
del ecuador, y la banda posterior a 1,25 mm [Streeten, 2003] del ecuador, sobre la
cápsula posterior. La anchura de las bandas anterior y posterior es 0,4 mm y 0,5
mm, respectivamente [Ludwig, 2001]. La anchura de la zona ecuatorial, por falta de
datos en bibliografı́a, se ha tomado similar a la banda posterior, 0,5 mm. La Figura
7.5 muestra las direcciones de aplicación de las fuerzas ciliares y la localización de
las bandas donde las zónulas se insertan a la cápsula. Los valores de las distancias
de dichas bandas al ecuador del cristalino, Xant , Xpos , Yant , Ypos se muestran en la
Tabla 7.3.
Las fuerzas ciliares se aplican como una fuerza por unidad de superficie uniformemente distribuida sobre las tres bandas indicadas de la cápsula. Las fuerzas
anterior, ecuatorial y posterior tienen un total de seis componentes (una radial y
una axial, cada una); sin embargo, como se ha indicado anteriormente, se impone
que la suma de las componentes axiales sea nula. Puesto que la fuerza ecuatorial no
Capı́tulo 7. Simulación de la acomodación y estudio de la presbicia
271
Figura 7.5: Posición de las bandas de inserción de las fibras zonulares en las que se
aplican las fuerzas ciliares, en la dirección de dichas fibras.
Banda
Anterior
Posterior
Ecuatorial
X (mm)
1.50
1.25
0.00
Y (mm)
1.04
1.29
0.00
Ancho (mm)
0.4
0.5
0.5
Tabla 7.3: Posición respecto al ecuador y anchura de las bandas de inserción zonular
anterior y posterior, mostradas en la Figura 7.5.
tiene componente axial, las componentes axiales anterior y posterior deben ser igual
en módulo, resultando un total de cuatro componentes como incógnitas. Se utiliza
un proceso iterativo para determinar el conjunto de valores de las componentes de
las fuerzas que logran modelar el cristalino hasta alcanzar la geometrı́a del estado
desacomodado, minimizando el error descrito en función de parámetros geométricos
entre la configuración resultante y la configuración que se debe alcanzar, establecida
previamente para el modelo de 30 años de edad y estado totalmente desacomodado
(ver apartado 7.2.2). Este proceso de cálculo se describe en el siguiente apartado.
7.5
7.5.1
Simulación del mecanismo de acomodación humano
Determinación de las fuerzas ciliares
Para determinar la magnitud de las fuerzas ciliares que actúan en el cristalino
humano se sigue la metodologı́a propuesta por Hermans et al. [2006], que consiste
en la aplicación de un conjunto de fuerzas, descritas en el apartado anterior, sobre
el modelo desarrollado de elementos finitos de cristalino humano, obteniéndose la
272
Modelado del ojo humano y tratamientos refractivos
configuración deformada.
Se establece una función de coste W definida como el error de mı́nimos cuadrados
similar a la propuesta por Hermans, en la que se consideran los errores relativos de
cuatro parámetros geométricos para valorar la correspondencia entre la geometrı́a
deformada y la que previamente se ha establecido para el estado desacomodado.
Estos parámetros son el espesor total T T , la curvatura anterior Cant , la constante
cónica anterior Qant y la curvatura posterior Cpos . Puesto que la asfericidad de la
superficie anterior es una propiedad geométrica de segundo orden, se le ha asignado
un factor de peso diez veces más pequeño que las curvaturas anterior y posterior y
el espesor total del cristalino. La ecuación (7.6) muestra la función de coste W.
W = ECant +
1
· EQant + ECpos + ET T
10
(7.6)
Para calcular la función de coste después de cada iteración, se determina el
desplazamiento de los nodos de las superficies anterior y posterior del córtex ubicados
en el entorno del eje óptico, en un radio de 2,5 mm para la zona anterior y de 2
mm para la posterior. A continuación se ajustan las curvas definidas por dichos
nodos en la configuración deformada, estimando los valores de radio y curvatura
correspondientes.
Se aplican diversas combinaciones de valores de las componentes de las fuerzas
ciliares para determinar la combinación óptima que minimiza la función de error
W mediante un proceso iterativo. Se utiliza como valor inicial 0,081 N [Hermans
et al., 2006]. El valor resultante del presente estudio debe ser distinto, puesto que se
considera los materiales hiperelásticos e incorpora mejoras geométricas del modelo
con respecto al utilizado por el citado autor. Las variaciones realizadas sobre los
valores iniciales son las siguientes: Θant , kFant k, Θpos , Θant , kFec k, Θant , kFant k,
Θpos , kFec k. El proceso se detiene al obtener un valor mı́nimo del error que no
disminuye modificando los parámetros considerados en las anteriores iteraciones.
La Figura 7.6 muestra los errores correspondientes a todos los casos de cálculo
planteados. El mı́nimo se alcanza para un valor total de la fuerza de 0,07887 N.
Los valores obtenidos para las componentes de las fuerzas ciliares se muestran en la
Tabla 7.4.
Cuando la función de coste alcanza un mı́nimo, las curvaturas anterior y posterior de la geometrı́a deformada son prácticamente coincidentes con las curvaturas
anterior y posterior previamente establecidas, correspondientes a la geometrı́a deformada del cristalino en el estado totalmente desacomodado. Los valores obtenidos
para estos parámetros se encuentran en la Tabla 7.5.
El valor estimado de las fuerzas necesarias para lograr el cambio de morfologı́a
desde el estado acomodado al no-acomodado es 0,078 N, cinco veces mayor que 0,015
N, estimado por Fisher [1977]. Sin embargo, los resultados de simulación numérica
están de acuerdo con los obtenidos por otros trabajos de simulación del proceso de
acomodación mediante elementos finitos. Burd et al. [2002] obtuvo valores de las
Capı́tulo 7. Simulación de la acomodación y estudio de la presbicia
273
Figura 7.6: Las curvas representan el error total obtenido en los distintos casos
simulados de combinación de las componentes de las fuerzas ciliares.
Fant,x (N )
0,02516
Fant,y (N )
-0,016339
Θant
33o
Fec,x (N )
0,040
Fpos,x (N )
0,01371
Fpos,y (N )
0,016339
Θpos
50o
Fcil (N )
0,07887
Tabla 7.4: Valores óptimos de las componentes de las fuerzas ciliares correspondientes al proceso de desacomodación obtenidos mediante simulación numérica para el
modelo de 30 años de edad.
fuerzas ciliares que oscilaban entre 0,08 y 0,1 N; Hermans et al. [2006] obtuvo un
valor de 0,081 N. Estos valores son ligeramente superiores a los que se han obtenido
en el presente trabajo, pero estos autores no tuvieron en cuenta la variación del
espesor capsular con la posición radial, considerándolo constante para las superficies
anterior y posterior del cristalino, resultando de menor rigidez que en el modelo aquı́
propuesto.
Las Figura 7.7 muestra el ajuste realizado de las superficies anterior y posterior
del cristalino tras la simulación del proceso mediante elementos finitos. En las
imágenes superiores, la curva verde representa la cónica de ajuste de los nodos de la
zona óptica en la superficie anterior (a) y posterior (b). En las figuras inferiores se
representa la misma curva de ajuste, superpuesta a las curvaturas de referencia, en
lı́nea discontinua, que han sido descritas previamente para las superficies anterior
y posterior del modelo de 30 años de edad, correspondientes al estado totalmente
desacomodado. Se ha considerado un área central de radio 2,5 mm en la cara
anterior y 2 mm en la posterior, para comparar la coincidencia de las superficies de
referencia con las obtenidas mediante la simulación numérica. Se puede observar
Modelado del ojo humano y tratamientos refractivos
274
(a)
(b)
(c)
(d)
Figura 7.7: Curvaturas anterior y posterior del modelo de cristalino de 30 años de
edad. Todas las dimensiones están en milı́metros. Curvas cónicas de ajuste, en
verde, de los nodos correspondientes al área central de las superficies anterior (a) y
posterior (b). Curvas de ajuste, en verde, de las superficies anterior (c) y posterior
(d), superpuestas a la curvatura de referencia (lı́nea negra discontinua).
que la curvatura posterior del cristalino se ajusta la curvatura de referencia, pero
el ajuste de las curvaturas anteriores no es tan bueno en la periferia. El radio de
ajuste en el ápex coincide, pero el valor de la constante cónica Q no parece ser
suficientemente preciso.
La Figura 7.8 muestra la distribución de deformaciones en la cápsula para la
configuración deformada del modelo de elementos finitos correspondiente a la edad
de 30 años. El mayor valor en la cápsula (LE = 0, 0703) se indica el valor de la
deformación unidimensional λprincipal = eLE = e0,0703 = 1, 0728 que corresponde a
un 7,28%. Este valor confirma que el tejido capsular tiene un comportamiento en
grandes deformaciones, lo que confirma la suposición inicial de modelar el tejido
capsular como material hiperelástico. La Figura 7.9 muestra la distribución de la
tensión principal máxima en la cápsula, correspondiente al estado no acomodado
del modelo de 30 años de edad. El valor máximo corresponde al entorno del polo
Capı́tulo 7. Simulación de la acomodación y estudio de la presbicia
W
0,006
Cant [mm]−1
0,09696
kant
3,78
Cpos [mm]−1
0,1745
275
T T [mm]
3,573
Tabla 7.5: Valor del error cometido W y de los parámetros geométricos correspondientes a la última iteración del proceso de minimización.
Figura 7.8: Distribución de la deformación logarı́tmica en la cápsula, correspondiente
a la configuración deformada del modelo de 30 años.
posterior, donde el tejido capsular es más delgado. La tensión disminuye al aproximarse al ecuador, de 1, 603 · 10−1 a 8, 284 · 10−2 MPa, tendencia que se corresponde
con el espesor creciente del tejido capsular.
Figura 7.9: Distribución de la tensión principal máxima (MPa) en la cápsula, correspondiente al estado no-acomodado del modelo de 30 años.
La Figura 7.10 muestra la distribución de tensión principal máxima en el córtex
y en el núcleo correspondiente a la geometrı́a deformada (estado no acomodado) del
modelo de elementos finitos de 30 años de edad. El valor máximo (5, 526·10−4 MPa)
es entre 2 y 3 órdenes de magnitud más pequeño que los valores obtenidos para la
276
Modelado del ojo humano y tratamientos refractivos
Figura 7.10: Distribución de la tensión principal máxima (MPa) en córtex y núcleo,
correspondiente a la geometrı́a deformada del modelo de 30 años.
cápsula, debido a la diferencia de rigidez entre ambos.
7.5.2
Modificación de las propiedades de los tejidos con la
edad
Una vez estimadas las fuerzas ciliares para la edad de 30 años, se desarrollan
modelos de elementos finitos correspondientes a las edades de 40 y 50 años, para los
estados acomodado y desacomodado, siguiendo la misma metodologı́a. Los valores
obtenidos para las fuerzas ciliares pueden considerarse próximos a la realidad, y se
supone la hipótesis de que permanecen invariables con la edad. Se realizaron procesos iterativos con los modelos de 40 y 50 años de edad para estimar las propiedades de
material en cada caso. Para ello, se realizaron sucesivas modificaciones de los valores
de los parámetros de material para obtener la combinación óptima que proporciona
el mejor ajuste geométrico al modelo desacomodado previamente establecido.
La rigidez de la cápsula del cristalino en el rango de bajas deformaciones aumenta
con la edad Krag et al. [1997]; Pedrigi et al. [2007]. Sin embargo, para los cálculos
realizados con los modelos de edad de 40 y 50 años se ha supuesto que las propiedades
del tejido capsular permanecen constantes. Esta suposición adquiere cierta validez
dado que es muy pequeña la variación de las propiedades de material capsular en el
rango de años de nuestro estudio, entre 30 y 50 años [Ziebarth et al., 2008].
Optimización de las propiedades del núcleo
Para el modelo de cristalino de 40 años de edad se ha llevado a cabo un proceso
iterativo consistente en sucesivos cálculos, correspondientes a diferentes valores de
propiedades de material del núcleo, expresadas en función del valor del parámetro C1 ,
permaneciendo constante el valor de ese parámetro del córtex C1,cortex en 5, 74 · 10−4
MPa y obteniéndose un valor óptimo de C1,nucleo = 2, 85·10−4 MPa. En la figura 7.11
Capı́tulo 7. Simulación de la acomodación y estudio de la presbicia
277
Figura 7.11: Error obtenido mediante la variación de las propiedades de material
del núcleo, permaneciendo constantes las propiedades del córtex, en el modelo de 40
años.
se observa que el comportamiento del núcleo corresponde, como se podı́a esperar,
con el proceso de endurecimiento observado empı́ricamente, de manera que para
un valor de rigidez óptimo, las curvaturas de las superficies de la configuración
deformada se aproximan a las esperadas; por debajo de este valor de C1,nucleo , el
error aumenta debido a la excesiva deformación del cristalino, y por encima de
este valor, el error aumenta debido a que las fuerzas ciliares no logran producir la
suficiente deformación. Las curvas de ajuste de los nodos correspondientes a ambas
superficies se muestran en la Figura 7.12, en lı́nea verde continua. Se observa que
la superficie posterior se aproxima mejor que la superficie anterior a la curvatura
esperada (lı́nea negra discontinua).
El mismo proceso iterativo ha sido realizado con el modelo de cristalino de 50
años de edad. Se ha mantenido constante para todos los casos C1,cortex = 5, 74 · 10−4
MPa y se ha considerado la variación de las propiedades de material (C1 ) del núcleo.
La Figura 7.13 muestra la función de error obtenida en cada iteración, obteniéndose
un mı́nimo del error para C1,nucleo = 6, 32 · 10−4 MPa. Este valor es mayor que
el obtenido para edades inferiores, 30 años y 40 años, lo cual indica una continua
rigidización del tejido que compone el núcleo del cristalino. Las funciones cónicas
que ajustan las coordenadas de los nodos se representan en la figura 7.14.
Optimización de las propiedades del córtex
Un análisis similar al realizado para la variación de las propiedades de material
del núcleo se ha realizado para la optimización de las propiedades de material del
córtex, de forma independiente al comportamiento de los demás tejidos presentes en
278
Modelado del ojo humano y tratamientos refractivos
Figura 7.12: Curva de ajuste, en lı́nea verde continua, de los nodos de la zona óptica
pertenecientes a las superficies anterior (izquierda) y posterior (derecha) obtenidas
mediante simulación numérica, al modificar las propiedades del núcleo. La lı́nea
negra discontinua representa las curvaturas de referencia establecidas previamente
para el modelo de cristalino de edad 40 años. Dimensiones en milı́metros.
Figura 7.13: Error obtenido mediante la variación de las propiedades de material
del núcleo, permaneciendo constantes las propiedades del córtex, en el modelo de 50
años.
Capı́tulo 7. Simulación de la acomodación y estudio de la presbicia
279
Figura 7.14: Curva de ajuste, en lı́nea verde continua, de los nodos de la zona óptica
pertenecientes a las superficies anterior (izquierda) y posterior (derecha) obtenidas
mediante simulación numérica, al modificar las propiedades del núcleo. La lı́nea
negra discontinua representa las curvaturas de referencia establecidas previamente
para el modelo de cristalino de edad 50 años. Dimensiones en milı́metros. Dimensiones en milı́metros.
el modelo, para las dos edades consideradas, 40 y 50 años.
Para determinar el valor óptimo de C1,cortex a la edad de 40 años, se ha realizado un conjunto de cálculos utilizando el modelo correspondiente a esa edad. Se
han asignado distintos valores al valor de C1 del córtex, manteniendo C1,nucleo =
7, 50 · 10−5 MPa constante. Los resultados se muestran en las Figuras 7.15 y 7.16.
Se alcanza un mı́nimo de la función de error para un valor de C1,cortex = 2, 51 · 10−3
MPa. Fisher [1971] obtuvo un valor para el módulo de Young de 3, 9 · 10−3 MPa,
que según la expresión 5.17 corresponde a un valor de C1,cortex = 6.54 · 10−4 MPa,
considerablemente inferior al obtenido por nuestro modelo, por lo que se puede
concluir que la variación de las propiedades del córtex por sı́ mismas no logran
justificar el proceso de pérdida de acomodación.
Para determinar las propiedades del córtex a la edad de 50 años se sigue un
procedimiento análogo al anterior. El valor resultante de C1,cortex que optimiza la
función de error es mucho más alto de lo esperado, casi 3·10−2 MPa según muestra la
Figura 7.17, por lo que se considera que no es posible alcanzar la solución mediante
la variación de las propiedades del córtex manteniendo constantes las del núcleo.
Optimización de las propiedades de núcleo y córtex de forma conjunta
El cambio conjunto de las propiedades de material de núcleo y córtex ha sido
evaluado siguiendo el mismo procedimiento que el utilizado para los dos tejidos de
forma independiente. Se han obtenido las curvas de error correspondientes a la
variación de las proiedades de material (C1 ) del córtex para tres valores distintos
de C1 del núcleo, obteniéndose las tres curvas correspondientes. Posteriormente, se
determina el punto en que se alcanza el mı́nimo error.
Para la edad de 40 años se ha estimado la función de error correspondiente a
Modelado del ojo humano y tratamientos refractivos
280
Figura 7.15: Error obtenido mediante la variación de las propiedades de material
del córtex, permaneciendo constantes las propiedades del núcleo, en el modelo de 40
años..
tres valores diferentes de C1,nucleo , 9, 17 · 10−4 MPa, 6, 37 · 10−4 MPa y 2, 85 · 10−3
MPa, obteniéndose tres curvas de error mediante la variación de las propiedades de
material del córtex (Figura 7.18). El valor mı́nimo del error corresponde al mismo
valor de C1,nucleo que el determinado anteriormente, y C1,cortex = 1, 34 · 10−3 MPa.
Valores superiores o inferiores de rigidez del núcleo conducen a valores mayores del
error, como muestran las otras dos curvas. Se observa también que, cuanto mejor se
ajusta el valor del núcleo, menor es el valor de C1,cortex , que alcanza el mı́nimo error
global. Esta tendencia podrı́a indicar la existencia de valores de C1,cortex que dieran
lugar a menores valores del error que el obtenido con los tres casos considerados.
Los parámetros de material utilizados para caracterizar los distintos tejidos del
cristalino a la edad de 40 años, se recogen en la Tabla 7.6. Los valores del error
obtenidos mediante la simulación numérica para estos materiales se recogen en la
Tabla 7.7.
Núcleo 40 años
Córtex 40 años
C01
2, 8523 · 10−4
1, 3423 · 10−3
C10
0,0
0,0
D
70,59
15,00
C3
0,0
0,0
C4
0,0
0,0
Tabla 7.6: Propiedades de material de los tejidos que forman el núcleo y el córtex,
determinadas mediante simulación numérica, para la edad de 40 años. Todos los
valores están en MPa salvo el valor de C4 que es adimensional y D, en M P a−1 .
Para la edad de 50 años se ha seguido una metodologı́a similar. El resultado
se muestra en la figura 7.20. En ella se puede observar que el error alcanza un
Capı́tulo 7. Simulación de la acomodación y estudio de la presbicia
281
Figura 7.16: Curva de ajuste, en lı́nea verde continua, de los nodos de la zona óptica
pertenecientes a las superficies anterior (izquierda) y posterior (derecha) obtenidas
mediante simulación numérica, al modificar las propiedades del córtex. La lı́nea
negra discontinua representa las curvaturas de referencia establecidas previamente
para el modelo de cristalino de edad 40 años. Dimensiones en milı́metros.
error
Valores simulación 0,0156
Valores teóricos
-
Cant (mm−1 ) kant
0,0988
3,63
0,0963
4,00
Cpos (mm−1 ) T T (mm)
0,1642
3,784
0,1859
3,874
Tabla 7.7: Valor del error cometido y de los parámetros geométricos ajustados a la
malla después de la aplicación de las fuerzas ciliares para el modelo de 40 años.
valor asintótico, es decir, la variación en las propiedades del córtex puede no afectar
de manera significativa a la solución global, puesto que el error es independiente
del valor de C1,cortex . Estos resultados indican que, a edades avanzadas, el comportamiento del córtex no influye en la variación de la geometrı́a del cristalino provocada
por el proceso de acomodación, y la progresión de la presbicia se debe únicamente
al endurecimiento del núcleo. En la figura 7.21 se muestra el ajuste realizado de las
curvaturas anterior y posterior tras la optimización conjunta de C1,nucleo y C1,cortex
mediante simulación con el modelo de cristalino de edad 50 años.
Los parámetros de material estimados para los tejidos de cristalino a la edad
de 50 años se recogen en la Tabla 7.8. Los errores obtenidos tras las simulaciones
realizadas con estos valores de los parámetros de estos material se muestran en la
Tabla 7.9.
Núcleo 50 años
Córtex 50 años
C01
6, 3255 · 10−4
-
C10
0,0
-
D
31,83
-
C3
0,0
-
C4
0,0
-
Tabla 7.8: Propiedades de material de los tejidos que forman el núcleo y el córtex,
determinadas mediante simulación numérica, para la edad de 50 años. Todos los
valores están en MPa salvo el valor de C4 que son adimensionales y D, en M P a−1 .
282
Modelado del ojo humano y tratamientos refractivos
Figura 7.17: Gráfica con el valor del error cometido cuando se varı́a el parámetro
C1 del córtex sin alterar las propiedades del núcleo para 50 años.
error
Valores simulación 0,02061
Valores teóricos
-
Cant (mm−1 ) kant
0,0974
3,60
0,1020
4,00
Cpos (mm−1 ) T T (mm)
0,1631
3,96
0,1905
4,11
Tabla 7.9: Valor del error cometido y de los parámetros geométricos ajustados a la
malla después de la aplicación de las fuerzas ciliares para el modelo de 50 años.
Resultados de simulación para las edades de 40 y 50 años
Para las edades de 40 y 50 años, la simulación mediante de elementos finitos
muestra una distribución de tensión principal máxima similar a la obtenida para el
modelo de 30 años de edad, con valores máximos de 9, 6 · 10−2 MPa y 6, 197 · 10−2
MPa, respectivamente, para la cápsula, y 1, 364 · 10−3 MPa y 2, 050 · 10−3 MPa
para núcleo y córtex. La tendencia observada de tensión creciente en el interior del
cristalino y decreciente en la cápsula al aumentar la edad, durante el proceso de
acomodación, se debe al aumento del espesor capsular con la edad.
La Figura 7.22 muestra el cambio geométrico del cristalino durante un proceso
de desacomodación de -7,5 D en un modelo general de elementos finitos de cristalino
humano; la geometrı́a deformada se muestra superpuesta a la indeformada. Se
pueden observar los cambios en los distintos parámetros: radios de curvatura anterior
y posterior, asfericidad, espesor y radio ecuatorial.
En la Tabla 7.10 se muestran los cambios de espesor de córtex anterior ACT
y posterior P CT , y del núcleo N T que provoca el proceso de acomodación, tanto
los valores estimados por Dubbelman et al. [2003] como los resultados de simulación numérica. Los resultados numéricos confirman las observaciones empı́ricas:
la variación del espesor total del cristalino causada por el proceso de acomodación
se debe principalmente al cambio en el espesor del núcleo: N T cambia 0,3 mm
Capı́tulo 7. Simulación de la acomodación y estudio de la presbicia
283
Figura 7.18: Error obtenido mediante la variación de C1,cortex para tres valores
distintos de C1,nucleo , 9.18 · 10−5 MPa (añil), 2.85 · 10−4 MPa (magenta) y 6.37 · 10−4
MPa (verde), en el modelo de 40 años.
mientras que T T cambia 0,33 mm según Dubbelman, y 0,234 mm frente a 0,387
mm, según los resultados de simulación. En ambos casos, tanto Dubbelman como
la simulación numérica, se obtienen valores de un mismo orden de magnitud. Hay
una pequeña discrepancia entre los resultados experimentales de Dubbelman, en
que el espesor del córtex permanece prácticamente constante, y los obtenidos por
simulación numérica, que predicen un cambio no despreciable durante el proceso de
acomodación. Este pequeño desacuerdo puede ser debido a la incertidumbre de las
medidas experimentales y a las simplificaciones adoptadas en nuestro modelo.
El radio del cristalino, Rlens , aumenta entre las 7,5 D del estado acomodado y
las 0 D correspondientes al estado totalmente desacomodado. Con el modelo de 30
años, la simulación proporciona un incremento de 0,32 mm (desde 4,56 mm hasta
4,88 mm), algo mayor que 0,28 mm estimado por Strenk et al. [1999]. El cambio en
Rlens obtenido para 40 y 50 años es de 0,24 mm y 0,17 mm, respectivamente.
La Figura 7.23 muestra la dependencia casi lineal entre los radios de curvatura
anterior y posterior y la fuerza aplicada. Las expresiones empı́ricas de ambos radios
en función de la fuerza aplicada, en Newtons, son Rant (F ) = 44, 72 · F + 6, 71 y
Rpos (F ) = 11, 21 · F + 4, 71. Los correspondientes coeficientes de regresión son
R2 = 0, 9983 y R2 = 0, 9903. El mismo análisis se realiza para las edades de 40 y 50
años. Para el modelo de 40 años de edad, los radios anterior y posterior obtenidos son
Rant (F ) = 31, 813·F +7, 3206, Rpos (F ) = 11, 254·F +4, 8426, y los correspondientes
coeficientes de regresión son R2 = 0, 9925 y R2 = 0, 9936, respectivamente.
Para el modelo de 50 años de edad, los radios anterior y posterior, en función de
la fuerza, son Rant (F ) = 20, 459 · F + 8, 1851 y Rpos (F ) = 7, 3749 · F + 5, 0518, y
Modelado del ojo humano y tratamientos refractivos
284
Figura 7.19: Curva de ajuste, en lı́nea verde continua, de los nodos de la zona óptica
pertenecientes a las superficies anterior (izquierda) y posterior (derecha) obtenidas
mediante simulación numérica, al modificar las propiedades del córtex para un valor
óptimo de Enucleo = 1, 7 · 10−3 MPa. La lı́nea negra discontinua representa las
curvaturas de referencia establecidas previamente para el modelo de cristalino de
edad 40 años. Dimensiones en milı́metros.
ACT [mm]
N T [mm]
P CT [mm]
CT [mm]
T T [mm]
Rlens [mm]
7, 5D
0,89
2,49
0,58
1,47
3,96
4,56
0D (F EM )
0,804
2,256
0,513
1,317
3,573
4,88
0D (Dubbelman)
0,87
2,19
0,57
1,44
3,63
4,84
∆ (F EM )
0,086
0,234
0,067
0,153
0,387
0,32
∆ (Dubbelman)
0,02
0,3
0,01
0,03
0,33
0,28
Tabla 7.10: Cambio del espesor de córtex anterior ACT , núcleo N T , córtex posterior
P CT y córtex CT , causado por el proceso de acomodación a la edad de 30 años.
Valores obtenidos por simulación numérica para su comparación con los medidos por
Dubbelman et al. [2003]. Se muestra también el cambio en el radio del cristalino.
los coeficientes de regresión correspondientes, R2 = 0, 9964 y R2 = 0, 999, respectivamente.
Respecto al cambio en las propiedades de material con la edad, se han realizado
dos procesos iterativos, correspondientes a las edades de 40 y 50 años. Los valores
resultantes para los parámetros de material se muestran en la Tabla 7.11. C1 representa la rigidez del material, mientras que D1 es un coeficiente de penalización para
minimizar numéricamente el cambio volumétrico. Tanto el córtex como el núcleo
se hacen más rı́gidos con la edad. El córtex a la edad de 40 años es 1,8 veces más
rı́gido que a la edad de 30, y a los 50 años es 1,8 veces más rı́gido que a los 40. El
núcleo a los 40 años triplica la rigidez que tenı́a a los 30, y a los 50 duplica la que
tenı́a a los 40.
Capı́tulo 7. Simulación de la acomodación y estudio de la presbicia
285
Figura 7.20: Error obtenido mediante la variación de C1,cortex , para tres valores
distintos de C1,nucleo , 9, 18 · 10−5 MPa (añil), 8.40 · 10−4 MPa (violeta) y 6.37 · 10−4
MPa (marrón), en el modelo de 50 años.
Figura 7.21: Gráfica con la geometrı́a final de las superficies anterior (izquierda)
y posterior (derecha) alcanzada variando las propiedades del núcleo y del córtex
simultáneamente y comparación con la teórica para 50 años, las unidades están en
milı́metros.
7.6
Discusión
En este trabajo se presenta el desarrollo de un modelo de elementos finitos del
cristalino humano para estimar tanto las fuerzas ciliares que actúan en el proceso de
acomodación, como el cambio de propiedades de material de núcleo y córtex con la
edad. Para las simulaciones se han utilizado tres modelos, correspondientes a tres
edades, 30, 40 y 50 años, en estado acomodado. Además, se han construido otros
tres modelos en el estado totalmente desacomodado a esas mismas edades, que se
utilizan como geometrı́a de referencia para estimar la función de error de cada caso
calculado.
El modelo de 30 años de edad, para el cual se han tomado las propiedades de
material de la bibliografı́a, se ha utilizado para estimar el valor de las fuerzas ciliares.
Modelado del ojo humano y tratamientos refractivos
286
Figura 7.22: Geometrı́as deformada (rellena) e indeformada (rejilla) correspondientes al modelo EF de 30 años.
30 años
40 años
50 años
Córtex C1
0, 58295 · 10−3
1, 3423 · 10−3
2, 5168 · 10−3
Córtex D
34,54
15,00
8,00
Núcleo C1
0, 93667 · 10−4
2, 8523 · 10−4
6, 3255 · 10−4
Núcleo D
214,96
70,59
31,83
Tabla 7.11: Propiedades de material obtenidas para núcleo y córtex correspondientes
a los modelos de cristalino de edades de 40 y 50 años, comparadas con los valores
correspondientes al modelo de 30 años de edad. C1 en MPa y D en MPa−1 .
Posteriormente, se han realizado cálculos de forma iterativa para poder estimar los
valores de las propiedades de material a las edades de 40 y 50 años, bajo la hipótesis
de que dichas fuerzas no varı́an de forma significativa con la edad.
Tanto la geometrı́a como la metodologı́a utilizada se basa en trabajos otros autores (Burd et al. [2002]; Hermans et al. [2008]; Schachar et al. [1993]). Se han
realizado ciertas aportaciones que mejoran los modelos anteriores, consiguiendo presentar un modelo más realista. La mejora más relevante en cuanto a geometrı́a es la
introducción de una superficie ecuatorial no plana [Burd et al., 2002; Navarro et al.,
2007a]. El modelado exterior podrı́a haberse basado en algún modelo óptico más
compacto, por ejemplo el propuesto por Kasprzak [2000], que consiste en una sola
función capaz de reproducir toda la superficie, desde los polos hasta el redondeo
ecuatorial. Se ha optado por construir el modelo por partes, tomando cada parte
de distintos trabajos, con el objetivo de obtener un modelo paramétrico, en función
de la edad y del estado de acomodación.
Algunos modelos ópticos reproducen únicamente el área central, correspondiente
a la zona óptica del cristalino. Sin embargo, para desarrollar un modelo de elementos
finitos, el extremo ecuatorial debe ser también diseñado mediante un redondeo (no
medible in vivo por estar situado detrás del iris) capaz de unir las superficies anterior
y posterior, tangente al diámetro ecuatorial del cristalino. Se utiliza la aproximación
propuesta por Schachar et al. [1993]. La geometrı́a resultante no presenta excesiva
complejidad y permite la parametrización del modelo, logrando mayor realismo.
Capı́tulo 7. Simulación de la acomodación y estudio de la presbicia
287
Figura 7.23: Radio de curvatura de las superficies anterior y posterior del cristalino
obtenidos mediante la aplicación de las fuerzas ciliares. Se observa una regresión
casi lineal entre los radios de curvatura anterior y posterior y la fuerza aplicada,
representada mediante las expresiones Rant (F ) = 44, 72 · F + 6, 71 y Rpos (F ) =
11, 21 · F + 4, 71, F en Newtons.
Los tejidos vivos muestran un comportamiento en grandes deformaciones. Sin
embargo, una consulta bibliográfica muestra que los tejidos del cristalino han sido
hasta la fecha modelados como material elástico lineal [Burd et al., 2002; Ljubimova
et al., 2007; Hermans et al., 2008]. La principal aportación del presente estudio
es la utilización de un modelo de comportamiento hiperelástico cuasi-incompresible
para modelar los tejidos del cristalino humano: cápsula, córtex y núcleo. Se supone
cuasi-incompresibilidad debido al alto contenido en agua de todos los tejidos, siendo
introducida en el modelo mediante el coeficiente de penalización D, cuyos valores se
muestran en la Tabla 7.11. El incremento total de volumen del modelo fue de 0,71%
en el caso de 30 años de edad. Se ha llevado a cabo un análisis de sensibilidad para
valorar la influencia del parámetro D, aumentando el volumen en 2,72% y 4,25% para
valores crecientes de D: 171,43 (córtex) y 1.074 (núcleo), 342,86 (córtex) y 2.149,57
(núcleo), respectivamente. Como se puede esperar, cuanto más compresible es el
material, mayor es el cambio de volumen. La incompresibilidad del cristalino es
comúnmente aceptada [Kasprzak, 2000].
Núcleo y córtex se han supuesto materiales isótropos a pesar de estar caracterizados por una estructura organizada de fibras, por la imposibilidad de asignar
valores a los parámetros que caracterizan el comportamiento de material de dichas fibras. El saco capsular se considera anisótropo, con una familia preferencial de fibras
orientada de forma circunferencial. La simulación numérica proporciona un valor
288
Modelado del ojo humano y tratamientos refractivos
resultante de 7,28% de deformación para la cápsula, valor que confirma la hipótesis
inicial de que dicho tejido se modele como material hiperelástico, y confirma la falta
de rigor cometida si se considera material elástico lineal.
La dificultad principal del modelo consiste en estimar las propiedades de material. Debido a la escasez de datos en la bibliografı́a en cuanto a propiedades de
núcleo y córtex, se han tomado los valores estimados por Fisher [1971], a pesar de
que otros autores [Weeber et al., 2005; Burd et al., 2006] cuestionan la metodologı́a
de los experimentos de dicho autor, argumentando que la interpretación de sus resultados conduce a errores sistemáticos en la estimación de las propiedades de material
de ambos tejidos. Puesto que no se encuentra documentada ninguna medida o estimación de las propiedades de material de las fibras de colágeno de núcleo y córtex,
ambos tejidos han sido modelados como materiales isótropos. Por el contrario, se
han realizado múltiples estudios de las propiedades de material de la cápsula [Krag
and Andreassen, 2003a; Pedrigi et al., 2007] trabajos que han sido utilizados para
caracterizar el modelo aquı́ presentado.
Se ha realizado un análisis de la influencia de la posición de la inserción de
las zónulas ciliares en la cápsula del cristalino. Se desarrolló un modelo especı́fico
del cristalino para llevar a cabo este estudio, en el cual las bandas de inserción
eran más anchas que en el modelo que se ha presentado, finalmente utilizado para
la simulación. En el modelo para evaluación de la posición de las inserciones, las
bandas tienen mayor anchura de forma que llegaban a unirse cada una de ellas con la
contigua, es decir, la anterior con la ecuatorial y ésta, con la posterior, formando ası́
una única banda de inserción y por tanto, de aplicación de la fuerza uniformemente
distribuida. Los resultados de simulación mostraron muy pequeñas variaciones del
error total con respecto a la distribución que se planteó inicialmente, y por lo tanto,
una influencia despreciable.
En este estudio se ha supuesto que las fuerzas necesarias para modificar la geometrı́a entre los estados acomodado y no-acomodado permanece constante con la
edad. Algunos autores apoyan esta hipótesis [Hermans et al., 2008], pero no es
comúnmente aceptada. Para evaluar el efecto de la variación de las fuerzas ciliares
con la edad, se han aplicado valores hasta un 150% mayores que el estimado como
necesario para conducir al cristalino desde el estado acomodado al totalmente desacomodado. Se observó un aumento lineal de los radios anterior y posterior (Figura
7.23), que conduce a situaciones de acomodación negativa para valores de fuerzas
ciliares mayores de 0,078 N. Sin embargo, este efecto se amortigua para altos valores
de la fuerza, que también es observado en los modelos de edades 40 y 50 años. Es
posible que el aumento de las fuerzas ciliares, al causar una acomodación negativa,
pueda ayudar a compensar la “lens paradox” [Brown, 1973], que consiste en que
la potencia óptica del cristalino permanece constante a pesar del incremento de las
curvaturas anterior y posterior con la edad.
Se ha obtenido la expresión del radio de curvatura R, anterior y posterior, en
Capı́tulo 7. Simulación de la acomodación y estudio de la presbicia
289
Figura 7.24: Predicción de acomodación vs fuerza aplicada, según los resultados de
simulación.
función de la fuerza ciliar aplicada obtenida mediante simulación por elementos
finitos. Si se iguala esta expresión con la experimental que determina el radio de
curvatura R, anterior y posterior, en función del cambio dióptrico D obtenido por
el mecanismo de acomodación, se obtiene una expresión del rango dióptrico de acomodación D en función de la fuerza F, dando lugar a dos expresiones, correspondientes a las superficies anterior y posterior.
La Figura 7.24 muestra la acomodación predicha por la simulación numérica en
función de la fuerza ciliar aplicada, para las superficies anterior y posterior. Mientras
que la curva media predice de forma bastante precisa el comportamiento esperado
de los datos de Dubbelman, la simulación por elementos finitos predice un comportamiento ligeramente distinto para las superficies anterior y posterior. La superficie
anterior subestima los valores de acomodación al aumentar la fuerza, mientras que
el efecto opuesto, una sobreestimación de la acomodación, se obtiene mediante la
estimación por la superficie posterior. Esta discrepancia entre ambas curvas puede
interpretarse como un desacuerdo entre los ritmos de cambio de las curvaturas anterior y posterior durante el proceso de acomodación. Para corregirlo, serı́a necesario
que ambas curvas coincidieran y evitar ası́ esta inconsistencia residual. Si se acepta
que el resultado de la simulación numérica es correcto, se deberı́a modificar ligeramente los parámetros de los datos experimentales, aumentando el ritmo de cambio
de la curvatura posterior con la acomodación. La estrategia opuesta serı́a modificar los parámetros del modelo numérico. Puesto que la fuerza total se aplica de
forma radial, cualquier modificación del modelo de elementos finitos requerirı́a la
modificación de la geometrı́a (no podrı́a obtenerse un ajuste mejor modificando
únicamente las propiedades de material) pero en todos los casos se deberı́a suponer
290
Modelado del ojo humano y tratamientos refractivos
alguna modificación de los parámetros geométricos experimentales para obtener un
perfecto acuerdo entre el modelo y los datos experimentales.
De acuerdo a las imágenes obtenidas por cámara de Scheimpflug de la estructura interna del cristalino [Dubbelman et al., 2003], el espesor del córtex parece
permanecer constante durante el proceso de acomodación, siendo el cambio de espesor del núcleo la causa principal de la variación del espesor total T T . Este efecto
también se observa en la simulación numérica. Sin embargo, Dubbelman et al. [2003]
sugiere que ACT y P CT permanecen constantes durante la acomodación, lo que no
ha sido reproducido en nuestra simulación. Los valores de la variación del espesor
de núcleo y córtex obtenidas por simulación numérica y medidas por Dubbelman
et al. [2003] son del mismo orden de magnitud. El desacuerdo en los valores puede
ser debido a la incertidumbre en las medidas experimentales y/o a las hipótesis o
simplificaciones tomadas en nuestro modelo.
El incremento de Rlens que se obtiene de la simulación, para el modelo de edad
30 años, es de 0,32 mm frente a los 0,28 mm estimados según Strenk et al. [1999].
El radio ecuatorial no se ha incluido como factor a considerar en la construcción de
la función de coste, lo que podrı́a causar esta discrepancia. La incertidumbre en la
medida experimental podrı́a por sı́ misma explicar esta discrepancia. El cambio en
Rlens para los modelos de 40 y 50 años fue de 0,24 mm y 0,17 mm, respectivamente.
La tendencia observada con la edad de tensión creciente en el interior del cristalino y decreciente en la cápsula, durante el proceso de acomodación, puede deberse
al aumento de espesor del tejido capsular con la edad, dado que este resultado se ha
obtenido suponiendo que las fuerzas ciliares no se modifican con la edad [Hermans
et al., 2008].
Los resultados obtenidos por simulación numérica confirman que tanto córtex
como núcleo aumentan su rigidez con la edad. A pesar de las suposiciones adoptadas en este trabajo (fuerzas ciliares constantes con la edad, movimiento axial nulo
durante el proceso de acomodación, etc.) estos resultados corroboran la clásica
hipótesis de que los tejidos del cristalino aumentan su rigidez con la edad siendo
una importante causa, si no la principal, de la presbicia.
La metodologı́a desarrollada propone una potente herramienta para predecir
cambios acomodativos considerando la geometrı́a, propiedades de material, aplicación de fuerzas adecuadas, etc. Su aplicación futura no sólo puede llevar a un
mejor conocimiento de las causas de la presbicia, sino también al desarrollo de una
técnica capaz de restablecer la capacidad acomodativa.
Capı́tulo 8
Conclusiones y desarrollo futuro
En este capı́tulo se resume el trabajo de investigación realizado y las principales
conclusiones obtenidas. En primer lugar, se muestra un resumen de esta tesis. A
continuación, se exponen las principales conclusiones obtenidas. Posteriormente, se
detallan las aportaciones originales resultantes del trabajo desarrollado. Se enumeran los resultados de investigación en forma de publicaciones y participaciones
en congresos. Finalmente, se plantean las lı́neas futuras de investigación como continuación de esta tesis.
8.1
Resumen de la tesis
En esta tesis se ha propuesto el desarrollo de una metodologı́a de modelado de
córnea y cristalino para la simulación numérica de tratamientos refractivos. El paso
previo a la creación de un modelo debe ser siempre el establecimiento de los objetivos
que se persiguen con la simulación. Si se desea realizar un análisis generalista, con
el fin de extraer conclusiones válidas para un colectivo, deberán utilizarse valores
promedio tanto de los parámetros geométricos que definan el modelo geométrico,
como de las propiedades de material que caracterizan su comportamiento. Por el
contrario, si se desea estudiar el caso de un paciente especı́fico, se debe reproducir
fielmente tanto la geometrı́a como el comportamiento de la córnea de dicho paciente.
En esta tesis se proponen las herramientas para poder llevar a cabo cualquiera de
estos dos planteamientos de análisis. Se han propuesto distintos modelos genéricos
que permiten analizar los efectos aislados de parámetros caracterı́sticos de cirugı́a
incisional para corrección del astigmatismo, desvinculando los resultados de la variabilidad caracterı́stica de cada paciente y del factor cirujano. Se ha analizado la
posible influencia de la PIO en los resultados postquirúrgicos de cirugı́a láser para
corrección de la miopı́a. Asimismo, se ha realizado un estudio de los tratamientos
combinados para el queratocono, estableciendo la secuencia óptima de aplicación
de los tratamientos de cross-linking de colágeno corneal e inserción de segmentos
intraestromales de anillos corneales.
Por otra parte, un estudio particular de un paciente requerirı́a la incorporación a
un modelo personalizado de la geometrı́a de su córnea, tomada mediante topografı́as
291
Modelado del ojo humano y tratamientos refractivos
292
anterior y posterior, según se ha propuesto. El material deberı́a ser caracterizado de
forma personalizada para el paciente, proceso que se realizarı́a mediante la toma de
los parámetros CH y CRF con el equipo ORA (Reichert Ophthalmic Instruments,
Inc., Depew, New York), que se utilizarı́an para determinar, mediante el proceso iterativo de optimización indicado, los parámetros que caracterizan la viscoelasticidad
del tejido corneal del paciente según el modelo constitutivo propuesto.
Finalmente, la metodologı́a desarrollada para el modelado paramétrico del cristalino humano y la simulación numérica del proceso de acomodación han permitido
cuantificar las fuerzas ciliares que actúan durante dicho proceso, asumiendo la teorı́a
de Helmholtz, determinando de esta forma las propiedades de material de los tejidos
para las edades de estudio y su correspondiente pérdida de elasticidad con la edad,
como principal causa de la presbicia.
8.2
Conclusiones
Las conclusiones más relevantes de esta tesis se pueden dividir en dos aspectos
diferenciados, uno relativo a las conclusiones numéricas y mecánicas, y otro relativo
a las conclusiones clı́nicas.
8.2.1
Conclusiones mecánicas
• Se ha demostrado que el Método de los Elementos Finitos es una herramienta
útil y potente que permite el estudio de sistemas biológicos con coste reducido
en comparación con el análisis experimental de especı́menes reales.
• Se ha demostrado que el modelo de comportamiento propuesto para el tejido
corneal, que incorpora su carácter anisótropo, viscohiperelástico y cuasi-incompresible es capaz de caracterizar la respuesta del mismo en grandes deformaciones.
• Las condiciones fisiológicas pueden ser reproducidas en el modelo mediante la
introducción de las tensiones iniciales presentes en el tejido in vivo, de forma
previa a la simulación numérica del tratamiento en cuestión.
• Los parámetros de material del tejido corneal in vivo pueden ser determinados
a partir la medición de los parámetros CH y CRF de la córnea del paciente
mediante el equipo ORA (Ocular Response Analyzer, Reichert Ophthalmic
Instruments, Inc., Depew, New York).
• El acoplamiento de los modelos biomecánico y óptico permite predecir las
aberraciones inducidas quirúrgicamente.
Capı́tulo 8. Conclusiones y desarrollo futuro
293
• La creación de un modelo de cristalino humano paramétrico, en cuanto a edad
y estado acomodativo, permite la simulación del proceso de acomodación a
cualquier edad, ası́ como la estimación de propiedades de material mediante
un proceso iterativo de análisis inverso.
8.2.2
Conclusiones clı́nicas
• Se ha demostrado que el tratamiento de cross-linking del colágeno corneal
debe aplicarse durante un tiempo de exposición de radiación UVA no superior
al establecido por el tratamiento estándar (30 minutos), bajo los parámetros
normales de dicho tratamiento (impregnación de riboflavina al 0,1%, λ = 370
nm, 3 mW/cm2 ). Una prolongación del tiempo de exposición produce un
efecto contrario al esperado, debilitando el tejido, lo que debe advertir a la
comunidad clı́nica de los riesgos que ello implica, ası́ como la realización de un
retratamiento (segunda sesión) posterior.
• Se ha observado que puede existir cierta analogı́a entre la distribución de
tensiones en el tejido corneal tras la simulación de la cirugı́a incisional y el
mapa queratométrico postquirúrgico, por lo que la simulación podrı́a ser una
importante herramienta de predicción refractiva y de selección de parámetros
incisionales adecuados.
• Se ha propuesto una metodologı́a para nomogramas no discretos, es decir,
para la determinación de los valores de parámetros incisionales en casos de
necesidad de corrección de valores dióptricos intermedios entre los recogidos
por los nomogramas.
• La cirugı́a refractiva para corrección de la miopı́a mediante ablación láser debe
considerar la PIO del paciente como factor a tener en cuenta en la determinación de los parámetros de ablación, con el fin de evitar una infracorrección
superior a la esperada, o bien una hipercorrección inesperada.
• Según la simulación numérica de los tratamientos combinados para el queratocono, el implante de segmentos intraestromales logra mayor efecto de
aplanamiento y regularización de la morfologı́a corneal si se aplica previamente
el tratamiento de cross-linking del colágeno corneal.
• Los tejidos del cristalino aumentan su rigidez con la edad. Este cambio de sus
propiedades mecánicas es capaz, por sı́ mismo, de provocar la presbicia, puesto
que ante similar capacidad funcional del músculo ciliar, es decir, igual valor
de fuerzas ciliares aplicadas sobre la cápsula del cristalino, éste no es capaz de
adaptar su forma a la requerida para el cambio dióptrico acomodativo.
294
8.3
Modelado del ojo humano y tratamientos refractivos
Aportaciones originales
En esta tesis se han realizado las siguientes aportaciones originales:
• Se ha realizado un modelado geométrico personalizado de la córnea humana,
siendo únicamente aproximaciones la geometrı́as utilizadas hasta ahora en bibliografı́a. Esto supone, no sólo la capacidad de simular las distintas opciones
de tratamiento quirúrgico y la optimización de los parámetros asociados, sino
también el poder realizar un análisis de resultados mucho más realista, que
incluya todas las irregularidades topográficas del paciente, mediante un análisis
de aberrometrı́a para determinar la calidad visual post-quirúrgica.
• Se ha determinado la viscoelasticidad del tejido corneal mediante diversos
ensayos en laboratorio, en córnea de cerdo, de tracción uniaxial a distintas
velocidades, ası́ como ensayos de relajación. En la bibliografı́a se encuentran
únicamente ensayos de tracción uniaxial, a una determinada velocidad pero
siempre constante, independientes de la viscoelasticidad del tejido, o bien ensayos de creep sin más valores con los que ser constrastados.
• El logro más destacable de esta tesis es la determinación de las propiedades
del tejido corneal in vivo. Se ha propuesto un método para el ajuste de las
propiedades de material del paciente según el modelo constitutivo formulado.
El hecho de que se realicen a partir de medidas in vivo supone dos importantes
logros: el realizarlo en el mismo tejido que se desea realizar la simulación,
esto es, córnea humana en estado fisiológico, y el poder personalizarlo, siendo
valores correspondientes al paciente en cuestión con su patologı́a asociada, si
la hubiere.
• Se ha particularizado un modelo de comportamiento viscohiperelástico anisótropo 3D para tejidos blandos a membrana. En esta tesis se han aplicado estos
modelos a los tejidos corneal y capsular, respectivamente.
• Se han incorporado al modelo las tensiones iniciales presentes en los tejidos,
reproduciendo ası́ las condiciones fisiológicas. Para ello se ha establecido un
proceso iterativo que puede ser aplicado a cualquier modelo de tejido blando
que utilice este tipo de formulación, previamente a la simulación objeto de
estudio.
• Se ha realizado el modelado más completo existente en la bibliografı́a del cristalino humano, al modelar por separado y de forma realista, las partes que lo
componen. En la bibliografı́a se encuentra generalmente como un análisis de
elementos finitos bidimensional (sobre elemento lámina en lugar de hexaedro).
Además se ha asignado un comportamiento hiperelástico anisótropo a los distintos tejidos, siendo la aproximación a material elástico lineal e isótropo la
comúnmente utilizada en la bibliografı́a.
Capı́tulo 8. Conclusiones y desarrollo futuro
295
• Con esta simulación tan realista del cristalino humano, se contribuye al estudio
de las causas de la presbicia, patologı́a que afecta a la práctica totalidad de
la población a la edad de 65 años, y cuyos mecanismos de desarrollo todavı́a
permanecen sin descubrir en nuestros dı́as, siendo varias las teorı́as formuladas
en bibliografı́a pero ninguna demostrada cientı́ficamente.
• Se ha aportado a la práctica clı́nica oftalmológica las siguientes contribuciones:
– La cirugı́a refractiva con láser PRK, practicada según los parámetros
convencionales, produce una infracorrección para altos valores de astigmatismo (más de 6 D) si el paciente tiene un valor alto de PIO (en torno
a 21 mmHg).
– Una forma de cuantificar el efecto producido por la inserción de ICRS es
la disminución de profundidad de cámara anterior.
– El tratamiento más efectivo para el queratocono desde el punto de vista
biomecánico, es decir, que consigue mayor efecto de aplanamiento, es la
combinación de los tratamientos de CXL del colágeno corneal y posterior
implante de ICRS, y en este orden.
8.4
Resultados de investigación
Esta tesis ha dado lugar a la publicación de artı́culos en revistas Journal Citation Reports, ası́ como otras publicaciones y divulgación de trabajos en congresos,
nacionales e internacionales. A continuación se enumeran estos resultados de investigación.
Publicaciones indexadas JCR
1. Biomechanical properties analysis after corneal collagen cross-linking in
relation to ultraviolet A irradiation time. E. Lanchares, M. A. del Buey,
J. A. Cristóbal, L. Lavilla, B. Calvo. GRAEFES ARCH. CLIN. EXP.
OPHTHALMOL. En revisión.
2. Hyperelastic modelling of the crystalline lens: accommodation and presbyopia. E. Lanchares, B. Calvo, R. Navarro, M. Doblaré. ANN. BIOMED.
ENG. En revisión.
3. Corneal biomechanical properties in normal, regular astigmatic, and keratoconic eyes. M.A. Del Buey, José A Cristóbal, Francisco J. Ascaso, L.
Lavilla, E. Lanchares. J. CATARACT REFR. SURG. En revisión.
4. Effect of limbal relaxing incisions during phacoemulsification surgery based
on nomogram review and numerical simulation. J.A. Cristóbal, M.A. Del
Buey, J. Ascaso , E. Lanchares, B. Calvo, M. Doblaré. CORNEA, 28(9),
1042-1049, 2009.
296
Modelado del ojo humano y tratamientos refractivos
5. Lower- and higher- order aberrations predicted by an opto-mechanical
model of arcuate keratotomy for astigmatism. R. Navarro, Fernando
Palos, E. Lanchares, B. Calvo, J.A. Cristóbal. J. CATARACT REFR.
SURG., 35(1), 158-165, 2009.
6. Biomechanical properties of the cornea in Fuchs corneal dystrophy. M.A.
Del Buey, J.A. Cristóbal, Ascaso J., L. Lavilla, E. Lanchares. INVEST.
OPHTH. VIS. SCI. 50(7), 3199-3202, 2009.
7. Finite element simulation of arcuates for astigmatism correction. E. Lanchares, B. Calvo, J.A. Cristóbal, M. Doblaré, J BIOMECH, 41(4), 797805, 2008.
Congresos Internacionales
Se han presentado 18 trabajos en 10 congresos internacionales:
• A numerical model of the eye for simulation of corneal surgery and corneal
biomechanical properties. M.A. del Buey, E. Lanchares, J.A. Cristóbal,
B. Calvo, F.J. Ascaso, C. Palomino, L. Lavilla, M. Doblaré. European
Association for Vision and Eye Research EVER. Crete, Greece, 2010.
• Effect of a 60-minute riboflavine ultraviolet-A-induced cross-linking treatment on the stiffness of porcine corneal tissue. E. Lanchares, M. A. del
Buey, J. A. Cristóbal, B. Calvo, L. Lavilla, P. Casas, C. Palomino.XXVIII
Congress of the European Sociey of Cataract and Refractive Surgeons
ESCRS. Paris, 2010.
• Comparative biomechanical analysis of combined treatments for keratoconus. M. A. del Buey, E. Lanchares, J. A. Cristóbal, B. Calvo, L.
Lavilla. ASCRS Symposium and Congress Boston, MA., 2010.
• Comparative Study of the Biomechanical Properties in Spherical Refractive Errors. M.A. Del Buey , J.A. Cristóbal, E. Lanchares, L. Lavilla, E.
Ruiz de Gopegui, A. Mateo. ASCRS Symposium and Congress Boston,
MA., 2010.
• Numerical simulation of the keratoconic cornea and effect of the treatment
techniques. E. Lanchares, M. del Buey, J.A. Cristóbal, B. Calvo, L. Lavilla. XXVII Congress of the European Sociey of Cataract and Refractive
Surgeons ESCRS. Barcelona, 2009.
• Biomechanical properties of the cornea in eyes with moderate-high hyperopia in comparison with emetropic eyes. M. del Buey, J.A. Cristóbal,
L. Lavilla, E. Lanchares, A. Mateo. XXVII Congress of the European
Sociey of Cataract and Refractive Surgeons ESCRS. Barcelona, 2009.
Capı́tulo 8. Conclusiones y desarrollo futuro
297
• Numerical computation of the ciliary forces for the human accommodation
process. E. Lanchares, B. Calvo, R. Navarro, M. Doblaré. Wavefront and
Presbyopic Refractive Correction Congress. Alicante, 2009.
• Biomechanical properties of the cornea in moderate-high hyperopia. M.
del Buey, L. Lavilla, J.A. Cristóbal, E. Lanchares, B. Calvo, Ascaso
J. Wavefront and Presbyopic Refractive Correction Congress. Alicante,
2009.
• Computational simulation of the accommodation process and loss of accommodation with ageing. E. Lanchares, J.A. Cristóbal, M. del Buey, C.
Palomino Bautista, B. Calvo, L. Lavilla. XXVI Congress of the European
Society of Cataract and Refractive Surgeons ESCRS. Berlin, 2008.
• Corneal resistance factor (CRF) and corneal hysteresis (CH) associated
with glaucoma damage. M. del Buey, L. Lavilla, J.A. Cristóbal, E. Lanchares, C. Palomino Bautista, B. Calvo. XXVI Congress of the European
Society of Cataract and Refractive Surgeons ESCRS. Berlin, 2008.
• Opto-mechanical model of curved incisions for astigmatism correction.
E. Lanchares, B. Calvo, M. Doblaré, R. Navarro, 16th Congress of the
European Society of Biomechanics. ESB. Lucerne, 2008.
• The use of the Reichert ocular response analyser to establish the relationship between biomechanical properties and ocular pathology. M. del Buey,
J.A. Cristóbal, L. Lavilla, C. Palomino Bautista, E. Lanchares. ARVO
2008 Anual Meeting. Fort Lauderdale, 2008.
• Opto-mechanical model of curved incisions for astigmatism correction.
E. Lanchares, F. Palos, B. Calvo, R. Navarro, M. Doblaré. ARVO 2008
Anual Meeting. Fort Lauderdale, 2008.
• Measurements of objective scatter index (OSI) in LASIK patients. C.
Palomino Bautista, J.A. Cristóbal, D. Carmona, A. Castillo Gómez , M.
del Buey, E. Lanchares, S. Luque, J. Pujol, M. Vilaseca. ARVO 2008
Anual Meeting. Fort Lauderdale, 2008.
• Simulation of curved incisions for astigmatism correction.ISBN:978-8001-03762-1. A. Perez-del Palomar, E. Lanchares, B. Calvo, M. Doblaré.
Modelling of Heterogeneous Materials with Applications in Construction
and Biomedical Engineering MHM. Prague, 2007.
• Finite Element ocular model for the simulation of the corneal relaxing incisions. M. del Buey, E. Lanchares, J.A. Cristóbal, B. Calvo, M. Doblaré,
J. Mateo. XXV Congress of the European Society of Cataract and Refractive Surgeons ESCRS. Stockholm, 2007.
• The use of the Reichert ocular response analyser to establish the relationship between ocular hysteresis, corneal resistance factor and ocular
Modelado del ojo humano y tratamientos refractivos
298
pathology. M. del Buey, J.A. Cristóbal, E. Lanchares, A. Mayer, E. del
Prado, M. Rojo. XXV Congress of the European Society of Cataract and
Refractive Surgeons ESCRS. Stockholm, 2007.
• A numerical model of the eye for simulation of refractive surgery and
corneal properties. E. Lanchares, M. del Buey, J.A. Cristóbal, B. Calvo,
M. Doblaré, L. Lavilla. XXV Congress of the European Society of Cataract
and Refractive Surgeons ESCRS. Stockholm, 2007.
Congresos Nacionales
Se han realizado 15 participaciones en 10 congresos nacionales:
• Simulación numérica de los tratamientos combinados para el queratocono.
E. Lanchares, M.A. Del Buey, J.A. Cristóbal, B. Calvo. 25 Congreso de
la Sociedad Española de Cirugı́a Oftalmo Implanto Refractiva SECOIR.
Cádiz, 2010.
• Sesión cientı́fica: Biomecánica del cristalino en relación con lentes acomodativas. E. Lanchares (ponente). Sevilla Refractiva 2009 y 2o Congreso
de la Keratoconus Society. Sevilla, 2009.
• Sesión cientı́fica: Comportamiento estructural de la córnea con queratocono. E. Lanchares (ponente). Sevilla Refractiva 2009 y 2o Congreso de
la Keratoconus Society. Sevilla, 2009.
• Modelado numérico del proceso de acomodación del cristalino humano.
B. Calvo, E. Lanchares, R. Navarro, M. Doblaré, Congreso de Métodos
Numéricos en Ingenierı́a METNUM. Barcelona, 2009.
• Simposio: Córnea: Biomecánica y remodelamiento corneal. E. Lanchares
(ponente). 23 Congreso de la Sociedad Española de Cirugı́a Oftalmo
Implanto Refractiva SECOIR. Madrid, 2008.
• Simulación numérica del refuerzo estructural de segmentos intracorneales
sobre la biomecánica corneal. E. Lanchares, M. del Buey, B. Calvo, M.
Doblaré, 23 Congreso de la Sociedad Española de Cirugı́a Oftalmo Implanto Refractiva SECOIR. Madrid, 2008.
• Acoplamiento Biomecánico-Óptico para la simulación de cirugı́a refractiva. E. Lanchares, B. Calvo, R. Navarro, M. Doblaré, VIII Congresso
de Métodos Numéricos em Ingenharia - Congresso Ibero- Latinoamericano Sobre Métodos Computacionais Em Engenharia 2007 Conference,
Sociedad Española de Métodos Numéricos en Ingenierı́a SEMNI. Porto,
2007. Actas del VIII Congreso de Métodos Numéricos en la Ingenierı́a,
pp: 67 ISBN: 978-972-8953-16-4.
Capı́tulo 8. Conclusiones y desarrollo futuro
299
• Nuestra experiencia con lente Acrysoft tóricas. S. Valdyi, J.A. Cristóbal,
M. del Buey, E. Lanchares, D. Pérez, XVIII Congreso de la Sociedad
Aragonesa de Oftalmologı́a. Zaragoza, 2007.
• Córnea biomecánica modelado MEF y aplicaciones. E. Lanchares, M.
del Buey, J.A. Cristóbal, B. Calvo, M. Doblaré, XVIII Congreso de la
Sociedad Aragonesa de Oftalmologı́a. Zaragoza, 2007.
• Validación de modelo numérico ocular mediante simulación de incisiones
relajantes. M. del Buey, J.A. Cristóbal, E. Lanchares, 83 Congreso de la
Sociedad Española de Oftalmologı́a. Las Palmas, 2007.
• Diseño biomecánico de globo ocular para simulación numérica de cirugı́a
refractiva y propiedades corneales. E. Lanchares, M. del Buey, J.A.
Cristóbal, 83 Congreso de la Sociedad Española de Oftalmologı́a. Las
Palmas, 2007.
• Desarrollo de un modelo biomecánico de globo ocular para simulación
de cirugı́a refractiva. E. Lanchares, J.A. Cristóbal, M. Doblaré, Javier
Mateo Gabas, 22 Congreso de la Sociedad Española de Cirugı́a OftalmoImplanto Refractiva SECOIR. Benidorm, 2007.
• Simulación de incisiones relajantes corneales mediante el método de los
elementos finitos. A. Mateo, E. Lanchares, B. Calvo, D. Pérez, 22 Congreso de la Sociedad Española de Cirugı́a Oftalmo Implanto Refractiva
SECOIR. Benidorm, 2007.
• Hacia el modelado integral del ojo y de la respuesta visual. R. Navarro,
E. Pailos, F. Palos, P. Rodrı́guez, L. González, J. Aporta, B. Calvo, E.
Lanchares, J. Hernández, R. Valerio, VIII Reunión Nacional de Óptica,
2006.
• Simulación por elementos finitos de incisiones arcuatas para la corrección
del astigmatismo. E. Lanchares, B. Calvo, J.A. Cristóbal, M. Doblaré,
XXIV Congreso Anual de la Sociedad Española de Ingenierı́a Biomédica
CASEIB. Pamplona, 2006. Programa cientı́fico y libro de resúmenes, p.
151, ISBN 84-9769-159-8.
• Simulación por elementos finitos de la deformación del pecho para planificación quirúrgica. E. Lanchares, A. Pérez-del Palomar, B. Calvo, J.
Herrero, M. Doblaré, XXIV Congreso Anual de la Sociedad Española
de Ingenierı́a Biomédica CASEIB. Pamplona, 2006. Pamplona, 2006.
Programa cientı́fico y libro de resúmenes, p. 139, ISBN 84-9769-159-8.
Otras publicaciones
• The effect of intraocular pressure on the outcome of myopic photorefractive keratectomy: a numerical approach. E. Lanchares, B. Calvo, M.A.
300
Modelado del ojo humano y tratamientos refractivos
Del Buey, José A Cristóbal, M. Doblaré. J. HEALTHCARE ENG., 1(3),
461-476, 2010.
• Simulación biomecánica de segmentos intraestromales para mejorar la estabilidad estructural de la córnea. J.A. Cristóbal, M.A. del Buey, E.
Lanchares, B. Calvo. En: Queratocono: pautas para su diagnóstico y
tratamiento. Autor: Roberto Albertazzi. Ediciones Cientı́ficas Argentinas, 2010, pp 273-286. ISBN: 9789879758571.
• ¿Qué necesita el ojo para acomodar?. J.A. Cristóbal, M.A. del Buey, E.
Lanchares. En: Cirugı́a de la presbicia. Sociedad Española de Cirugı́a
Ocular Implanto-Refractiva, 2010, pp. 67-78. ISBN: 978-84-933144-8-4
• Simulación numérica del refuerzo estructural de segmentos intracorneales
sobre la biomecánica corneal. M.A. Del Buey, E. Lanchares, J.A. Cristóbal.
En: Técnicas de modelado corneal. Sociedad Española de Cirugı́a Ocular
Implanto-Refractiva, 2009, pp.263-270. ISBN: 978-84-933144-7-7
• Modelado biomecánico del tejido corneal. J.A. Cristóbal, E. Lanchares,
M.A. Del Buey, B. Calvo. En: Técnicas de modelado corneal. Sociedad
Española de Cirugı́a Ocular Implanto-Refractiva, 2009, pp. 51-59. ISBN:
978-84-933144-7-7
• Simulación numérica de la cirugı́a de incisiones relajantes sobre la córnea
humana. B. Calvo, E. Pena, V. Alastrué, E. Lanchares. En: Corrección
del astigmatismo. Sociedad Española de Cirugı́a Ocular Implanto-Refractiva, 2006, pp. 241-250. ISBN: 84-933144-4-7
Premios y reconocimientos
• Cornea. Posters of Special Interest. “Comparative Biomechanical Analysis of Combined Treatments for Keratoconus”. M.A. del Buey,
E. Lanchares, J.A. Cristóbal, B. Calvo, L. Lavilla. American Society
of Cataract and Refractive Surgeons (ASCRS) Symposium & Congress.
Boston, MA. April 9-14, 2010.
• Premios MSD-SEG de Investigación en Oftalmologı́a. Primer
Premio a la mejor publicación en Glaucoma.
“Biomechanical
properties of the cornea in Fuchs corneal dystrophy”. M.A. del Buey,
J.A. Cristóbal, Ascaso J., Lavilla L., E. Lanchares. INVEST. OPHTH.
VIS. SCI. 50(7), 3199-3202, 2009.
• 2nd Place Best Free Paper Presentation: “Numerical computation of
the ciliary forces for the human accommodation process”. E. Lanchares,
B. Calvo, R. Navarro, M. Doblaré. Lens Refractive and Wavefront Summit. Alicante, Spain. 7th March 2009.
Capı́tulo 8. Conclusiones y desarrollo futuro
301
• Premio a la mejor comunicación libre: “Simulación de incisiones
relajantes corneales mediante el método de elementos finitos”. A. Mateo,
E. Lanchares, B. Calvo, D. Pérez. 22 Congreso de la Sociedad Española
de Cirugı́a Ocular Implanto-Refractiva. Benidorm. 9, 10, 11 y 12 de
Mayo de 2007.
Menciones en prensa
• El Periódico de Aragón, 15 Enero 2009, sección I+Dear, pp.
4-5. “Buscando la perfección en cirugı́a ocular”. F. Mantecón.
• El Periódico de Aragón, 1 Enero 2008, sección I+Dear, p. 3.
“Más precisión en la cirugı́a ocular”. D. Lumbreras.
8.5
Lı́neas futuras
El trabajo desarrollado en esta tesis es el primero desarrollado en el Grupo de
Estructuras y Modelado de Materiales (GEMM, I3A, Universidad de Zaragoza) en
relación con el ojo humano, en el cual se han aglutinado diversos temas de interés
clı́nico, óptico y biomecánico, estableciendo una metodologı́a para su modelado. En
el futuro, serı́a de interés poder continuar desarrollando, desde el punto de vista
mecánico, algunos de los aspectos ya abordados.
A continuación se presentan algunas lı́neas de investigación cuya motivación
surge a partir de esta tesis, todas ellas de alto interés tanto clı́nico como computacional.
• El desarrollo de un modelo de comportamiento más complejo, en el que se
incorpore la cicatrización del tejido tras la cirugı́a, permitirı́a un análisis de los
parámetros relacionados con el postoperatorio, como el tiempo de cicatrización
y la posibilidad de opacificación o fibrosis que pueda afectar a la calidad visual
del paciente.
• Serı́a de interés la reproducción completa de un tratamiento quirúrgico en un
paciente real, realizando el proceso propuesto completo, desde la creación del
modelo personalizado y la estimación de los parámetros de material corneal
in vivo, hasta la interpretación de los resultados de simulación de la cirugı́a,
con el fin de perfeccionar todo el proceso, ası́ como de realizar los reajustes
necesarios.
• Una reproducción más completa del mecanismo de acomodación permitirı́a el
estudio y optimización del diseño de anclajes de lentes intraoculares pseudofáquicas acomodativas con el fin de optimizar la transmisión de las fuerzas
ciliares a la óptica de la lente, logrando el desplazamiento anteroposterior
necesario para el cambio dióptrico requerido en la acomodación.
302
Modelado del ojo humano y tratamientos refractivos
Figura 8.1: Modelado numérico de diversos tejidos del globo ocular.
• El desarrollo de un modelo biomecánico que acople al modelo paramétrico de
cristalino propuesto las estructuras circundantes involucradas en el mecanismo
de acomodación, es decir, fibras zonulares, procesos ciliares y músculo ciliar,
podrı́a contribuir de forma significativa a un mejor conocimiento del proceso
de acomodación del cristalino humano, ası́ como de las causas de la presbicia,
pues permitirı́a realizar simulaciones en las que cada uno de esos elementos
pudiera modificar su funcionalidad fisiológica, cuantificándose en qué medida
puede ser responsable de la pérdida de acomodación con la edad.
• Un diseño del globo ocular completo, que incorpore en su interior todos los
órganos involucrados en el proceso de acomodación (cristalino, fibras zonulares,
procesos ciliares y músculo ciliar), ası́ como la inserción posterior del nervio
óptico permitirı́a proceder al estudio de diversas patologı́as, refractivas o no,
como serı́a el caso del daño causado en las fibras nerviosas provocado por el
glaucoma (Figura 8.1).
Bibliografı́a
Aghamohammadzadeh, H., Newton, R. H., and Meek, K. M. (2004). X-ray scattering used to map the preferred collagen orientation in the human cornea and
limbus. Structure, 12:249–256.
Ahearne, M., Yang, Y., Then, K. Y., and Liu, K. K. (2007). An indentation technique to characterize the mechanical and viscoelastic properties of human and
porcine corneas. Annals of Biomedical Engineering, 35(9):1608–1616.
Ahn, J., Yang, H., Lew, H. M., and Kim, E. K. (2009). Comparison of the topographic ablation zone after photorefractive keratectomy for myopia using two
different excimer lasers. Eye, In Press.
Akura, J., Matsuura, K., and Hatta, S. (2001). Clinical application of full-arc,
depth-dependent, astigmatic keratotomy. Cornea, 20:839–843.
Alastrué, V., Calvo, B., Peña, E., and Doblaré, M. (2006). Biomechanical modelling
of refractive corneal surgery. ASME J Biomech Eng, 128:150–160.
Anderson, K., El-Sheikh, A., and Newson, T. (2004). Application of structural
analysis to the mechanical behaviour of the cornea. J. R. Soc. Interface, 1:3–15.
Antón, A., Andrada, M. T., Mayo, A., Portela, J., and Merayo, J. (2009). Epidemiology of refractive errors in an adult European population: the Segovia study.
Ophthalmic Epidemiol., 16(4):231–7.
Arba-Mosquera, S. and De-Ortueta, D. (2009). Analysis of optimized profiles for
‘aberration-free’ refractive surgery. Ophthalmic Physiol Opt, 29(5)):535–48.
Ascaso, F. J., Cristóbal, J. A., and Lizana, J. (2001). Cataracts in Ancient Egypt.
J Cataract Refract Surg, 27:1714–1715.
Atchison, D. A. and Smith, G. (2000). Optics of the Human Eye. ButterworthHeinnemann, Oxford, UK.
Barraquer, J. I. (1964). Conducta de la córnea frente a los cambios de espesor
(contribución a la cirugı́a refractiva). Arch Soc Am Oftalmol Optom, 5:81–87.
303
304
Modelado del ojo humano y tratamientos refractivos
Barraquer, R. I., De-Toledo, M. C., and Torres, E. (2004). Distrofias y degeneraciones corneales. Ed. Espax Publicaciones Médicas. Barcelona.
Bayramlar, H., Daglioglu, M. C., and Borazan, M. (2003). Limbal relaxing incisions
for primary mixed astigmatism and mixed astigmatism after cataract surgery. J
Cataract Refract Surg, 29:723–728.
Beckman, H., Fuller, T. A., Boyman, R., Mandell, G., and Nathan, L. E. (1980).
Carbon dioxide laser surgery of the eye and adnexa. Ophthalmology, 87(10):990–
1000.
Belaidi, A. and Pierscionek, B. K. (2007). Modeling internal stress distributions in
the human lens: Can opponent theories coexist? Journal of Vision, 7(11):1:1–12.
Bellezza, A. J., Rintalan, C. J., Thompson, H. W., Downs, J. C., Hart, R. T.,
and Burgoyne, C. F. (2003). Deformation of the lamina cribrosa and anterior
scleral canal wall in early experimental glaucoma. Invest. Ophthalmol. Vis. Sci.,
44:623–637.
Belmonte, J. (2005). Cirugı́a del astigmatismo. Microcirugı́a ocular, 2:1714–1715.
Bertasso, J. F. K. A. M. and Neider, M. W. (1987). Slit-lamp studies of the rhesus
monkey eye: Ii. changes in crystalline lens shape, thickness and position during
accommodation and aging. Exp Eye Res, 45:317–326.
Bito, L. Z. and Miranda, O. C. (1989). Accommodation and presbyopia. In: Reinecke
RD, Ed. Ophthalmology Annual. New York: Raven Press.
Blavatskaya, E. D. (1968). Intralamellar homoplasty for the purpose of relaxation
of refraction of the eye. Arch Soc Am Oftalmol Optom, 6:311–325.
Boote, C., Dennis, S., Huang, Y., Quantock, A., and Meek, K. M. (2005). Lamellar
orientation in human cornea in relation to mechanical properties. Journal of
Structural Biology, 149:1–6.
Boote, C., Dennis, S., Newton, R. H., Puri, H., and Meek, K. M. (2003). Collagen
fibrils appear more closely packed in the prepupillary cornea: Optical and biomechanical implications. Investigative Ophtalmology & Visual Science, 44 (7):2941–
2948.
Boote, C., Hayes, S., Jones, S., Quantock, A. J., Hocking, P. M., Inglehearn, C. F.,
Ali, M., and Meek, K. M. (2008). Collagen organization in the chicken cornea
and structural alterations in the retinopathy, globe enlarged (rge) phenotype - An
X-ray diffraction study. Journal of Structural Biology, 161:1–8.
Bores, L. D. (2007). The nexus. www.e-sunbear.com.
BIBLIOGRAFÍA
305
Borja, D., Manns, F., Lamar, P., Rosen, A., Fernandez, V., and Parel, J. M. (2004).
Preparation and hydration control of corneal tissue strips for experimental use.
Cornea, 23(1):61–66.
Born, M. and Wolf, E. (1999). Principles of optics: electromagnetic theory of propagation, interference and diffraction of light. 7th Edition. Cambridge University
Press.
Bouchet, A. and Cuilleret, J. (1979). Anatomı́a descriptiva, topográfica y funcional.
Vol. 2, Cara, cabeza, órganos de los sentidos. Editorial Médica Panamericana,
Buenos Aires.
Boyce, B. L., Jones, R. E., Nguyen, T. D., and Grazier, J. M. (2007). Stresscontrolled viscoelastic tensile response of bovine cornea. J Biomech, 40:2367–2376.
Brown, N. (1973). Change in shape and internal form of the lens of the eye on
accommodation. Experimental Eye Research, 15:441–459.
Brown, N. P. (1974). The change in lens curvature with age. Exp Eye Res, 19:2789–
2800.
Bryant, M. R. and McDonnell, P. J. (1996). Constitutive laws for biomechanical
modeling of refractive surgery. ASME J Biomech Eng, 118:473–481.
Bryant, M. R. and McDonnell, P. J. (1998). A triphasic analysis of corneal swelling
and hydration control. ASME Journal of Biomechanical Engineering, 120:370–
381.
Bryant, M. R., Szerenyi, K., Schmotzer, H., and McDonnell, P. J. (1994). Corneal
tensile strength in fully healed radial keratotomy wounds. Invest. Ophthalmol.
Vis. Sci., 35(7):3022–3031.
Budak, K., Yilmaz, G., Aslan, B. S., and Duman, S. (2001). Limbal relaxing incisions
in congenital astigmatism: 6 month follow-up. J Cataract Refract Surg, 27:715–
719.
Buratto, L., Ferrari, M., and Genisi, C. (1993). Keratomileusis for myopia with
the excimer laser (Buratto technique): short-term results. Refract Corneal Surg.,
9:130–133.
Burd, H. J. (2009). A structural constitutive model for the human lens capsule.
Biomech Model Mechanobiol, 8:217–231.
Burd, H. J., Judge, S. J., and Cross, J. A. (2002). Numerical modelling of the
accommodating lens. Vision Research, 42:2235–2251.
306
Modelado del ojo humano y tratamientos refractivos
Burd, H. J., Wilde, G. S., and Judge, S. J. (2006). Can reliable values of Young’s
modulus be deduced from Fisher’s spinning lens measurements? Vision Research,
46:2235–2251.
Buzard, K. A. (1992). Introduction to biomechanics of the cornea. Refract Corneal
Surg, 8:127–138.
Cabrera, D., Niazy, A. M., Kurtz, R. M., Djotyan, G. P., and Juhasz, T. (2006a).
Biomechanical model of corneal transplantation. J Ref Surg, 22(3):293–302.
Cabrera, D., Niazy, A. M., Kurtz, R. M., Djotyan, G. P., and Juhasz, T. (2006b). A
finite element model for ultrafast laser-lamellar keratoplasty. Ann. Biomed. Eng.,
34:69–183.
Cabrera, D., Niazy, A. M., Kurtz, R. M., Djotyan, G. P., and Juhasz, T. (2006c).
Finite-element simulation of corneal applanation. J Cataract Refract Surg,
32(7):1073–4.
Calossi, A. (2007). Corneal asphericity and spherical aberration. J. Refractive
Corneal Surgery, 23:505–514.
Calvo, B., Martins, P., Mascarenhas, T., M.Doblare, Natal-Jorge, R. M., and Ferreira, A. (2009). On modelling damage process in vaginal tissue. J Biomech,
42:642–651.
Camellin, M. (2003). Laser epithelial keratomileusis for myopia. J Refract Surg,
19(6):666–70.
Carew, E. O., Garg, A., Barber, J. E., and Vesely, I. (2004). Stress relaxation
preconditioning of porcine aortic valves. Ann Biomed Eng., 32(4):563–572.
Carew, T. E., Vaishnav, R. N., and Patel, D. J. (1968). Compressibility of the
arterial wall. Circ Res, 23:61–86.
Cezón, J. (2009). Técnicas de modelado corneal. Desde la ortoqueratologı́a hasta el
cross-linking. Monografı́as de la Sociedad Española de Cirugı́a Ocular ImplantoRefractiva. Madrid, Spain.
Chan, C. C., Sharma, M., and Wachler, B. S. (2007). Effect of inferior-segment
Intacs with and without C3-R on keratoconus. J Cataract Refract Surg, 33(1):75–
80.
Chaudhry, H. R., Bukiet, B., Davis, A., Ritter, A. B., and Findley, T. (1997).
Residual stress in oscillating thoracic arteries reduce circumferential stresses and
stress gradient. J Biomech, 30:57–62.
BIBLIOGRAFÍA
307
Christensen, R. M. (1982). Theory of the Viscoelasticity. Dover Publications, New
York.
Chu, Y., Hardten, D., Lindquist, T., and Lindstrom, R. (2005). Astigmatic keratotomy. Duane’s Ophthalmology. Lippincott Williams and Wilkins, Philadelphia.
Coleman, D. J. (1970). Unified model for accommodative mechanism. Am J Ophthalmol, 69:1063–1079.
Coleman, D. J. (1986). On the hydraulic suspension theory of accommodation.
Trans Am Ophthalmol Soc UK, 84:846–868.
Colin, J. (2006). European clinical evaluation: Use of intacs for the treatment of
keratoconus. J Cataract Refract Surg, 32:747–755.
Colin, J., Cochener, B., Savary, G., and Malet, F. (2000). Correcting keratoconus
with intracorneal rings. J Cataract Refract Surg, 26:1117–1122.
Crawford, K. S., Kaufman, P. L., and Bito, L. Z. (1990). The role of the iris in
accommodation of rhesus monkeys. Inv Ophthalmol Vis Sci, 31:2189–2190.
Cristóbal, J. A. (2001). Incisiones corneales relajantes asociadas. En: Facoemulsificación y emetropı́a. Fernández-Vega L. Monografı́as de la Sociedad Española de
Cirugı́a Ocular Implanto-Refractiva. Madrid, Spain.
Cristóbal, J. A. (2006). Corrección del astigmatismo. Monografı́as de la Sociedad
Española de Cirugı́a Ocular Implanto-Refractiva. Madrid, Spain.
Cristóbal, J. A., del Buey, M. A., and Mateo, A. (2006). Astigmatismo y Catarata.
En: El Libro de Cristalino de las Américas. Centurión V, Nýcoli C, Villar-Kuri
J. Ed. Santos, Brazil.
Croft, M. A., Glasser, A., Heatley, G., McDonald, J., Ebbert, T., Dahl, D. B.,
Hadkarni, N. V., and Kaufman, P. L. (2006). Accommodative ciliary body and lens
function in rhesus monkeys, I: normal lens, zonule and ciliary process configuration
in the iridectomized eye. Inv Ophthalmol Vis Sci, 47:3.
Croft, M. A., Tamm, E., and Jungkunz, W. (1992). Age related loss of ciliary muscle
mobility in the rhesus monkey: role of the choroid. Arch Ophthalmol, 110:871–876.
Crouch, J. R., Merriam, J. C., and Crouch, E. R. (2005). Finite element model of
cornea deformation. In: Medical Image Computing and ComputerAssisted Intervention (MICCAI). Duncan, J. S., Gerig, G. (Eds.). Springer, Berlin, Heidelberg.
David, G. and Humphrey, J. D. (2007). Finite element model of stresses in the anterior lens capsule of the eye. Computer Methods in Biomechanics and Biomedical
Engineering, 10:237–243.
308
Modelado del ojo humano y tratamientos refractivos
David, G., Pedrigi, R. M., Heistand, M. R., and Humphrey, J. D. (2007). Regional
multiaxial mechanical properties of the porcine anterior lens capsule. Journal of
Biomechanical Engineering, 129:97–104.
de Borst, R. (1991). The zero-normal-stress condition in plane-stress and shell
elastoplasticity. Commun. Appl. Num. Meth., 7:29–33.
Deenadayalu, C., Mobasher, B., Rajan, S. D., and Hall, G. W. (2006). Refractive
change induced by the lasik flap in a biomechanical finite element model. J Refract
Surg, 22(3):286–292.
del Buey, M. A., Cristóbal, J., Lavilla, L., Ascaso, F. J., Lanchares, E., Remón,
L., and Mateo, A. (2009a). Biomechanical properties of the cornea in moderatehigh congenital astigmatism, keratoconus and normal eyes. In Program Summary,
ARVO Anual Meeting.
del Buey, M. A., Cristóbal, J. A., Ascaso, F. J., Lavilla, L., and Lanchares, E.
(2009b). Biomechanical properties of the cornea in Fuchs’ corneal dystrophy.
Invest Ophthalmol Vis Sci, 30:3199–3202.
Djotyan, G. P., Soong, H. K., Mian, S., Fernández, D. C., Kurtz, R. M., and Juhasz,
T. (2006). Finite-element modeling of posterior lamellar keratoplasty: Construction of theoretical nomograms for induced refractive errors. Ophthalmic Res,
38:329–334.
Doehring, T. C., Carew, E. O., and Vesely, I. (2004). The effect of strain rate on
the viscoelastic response of aortic valve tissue: a direct-fit approach. Ann Biomed
Eng., 32(2):223–32.
Drexler, W., Baumgartner, A., and Findl, O. (1997). Biometric investigation of
changes in the anterior eye segment during accommodation. Vision Research,
37:2789–2800.
Dubbelman, M., Sicam, V. A. D. P., and van der Heijde, G. L. (2006). The shape
of the anterior and posterior surface of the aging human cornea. Vision Research,
46:993–1001.
Dubbelman, M. and van der Heijde, G. L. (2001). The shape of the aging human
lens: curvature, equivalent refractive index and the lens paradox. Vision Research,
41:1867–1877.
Dubbelman, M., van der Heijde, G. L., and Weeber, H. A. (2005). Change in
shape of the aging human crystalline lens with accommodation. Vision Research,
45:117–132.
BIBLIOGRAFÍA
309
Dubbelman, M., van der Heijde, G. L., Weeber, H. A., and Vrensen, G. F. J. M.
(2003). Changes in the internal structure of the human crystalline lens with age
and accommodation. Vision Research, 43:2363–2375.
Dupps, W. J. and Wilson, S. E. (2006). Biomechanics and wound healing in the
cornea. Experimental Eye Research, 83:3199–3202.
Dvorkin, E., Pantuso, D., and Repetto, E. (1995). A formulation of the MITC4
shell element for finite strain elasto-plastic analysis. Computer Methods in Applied
Mechanics and Engineering, 125:17–40.
Elsheikh, A. and Alhasso, D. (2009). Mechanical anisotropy of porcine cornea and
correlation with stromal microstructure. Experimental Eye Research, 88:1084–
1091.
Elsheikh, A., Brown, M., Alhasso, D., Rama, P., Campanelli, M., and GarwayHeath, D. (2008). Experimental assessment of corneal anisotropy. J Refract Surg,
24(2):178–187.
Elsheikh, A. and Wang, D. (2007). Numerical modelling of corneal biomechanical
behaviour. Comput. Methods in Biomech. and Biomed. Eng., 10(2):85–95.
Elsheikh, A., Wang, D., Brown, M., Rama, P., Campanelli, M., and Pye, D. (2007a).
Assessment of corneal biomechanical properties and their variation with age. Current Eye Research, 32:11–19.
Elsheikh, A., Wang, D., Kotecha, A., Brown, M., and Garway-Heath, D. (2006).
Evaluation of Goldmann applanation tonometry using a nonlinear finite element
ocular model. Ann Biomed Eng, 34(10):1628–40.
Elsheikh, A., Wang, D., and Pye, D. (2007b). Determination of the modulus of
elasticity of the human cornea. J Refract Surg, 23(8):808–18.
Ettema, G. J. C., Gohb, J. T. W., and Forwooda, M. R. (1998). A new method
to measure elastic properties of plastic-viscoelastic connective tissue. Medical
Engineering & Physics, 20(4):308–314.
Fincham, E. F. (1937). The mechanism of accommodation. British Journal of
Ophthalmology, Suppl.8:5–80.
Fisher, R. F. (1969). Elastic constants of the human lens capsule. Journal of
Physiology - London, 201:1.
Fisher, R. F. (1971). The elastic constants of the human lens. Journal of Physiology
- London, 212:147.
310
Modelado del ojo humano y tratamientos refractivos
Fisher, R. F. (1977). The force of contraction of human ciliary muscle during accommodation. Journal of Physiology - London, 270:51.
Fisher, R. F. (1982). The vitreous and lens in accommodation. Trans Ophthalmol
Soc UK, 102:318–322.
Fisher, R. F. (1983). Is the vitreous necessary for accommodation in man? Br J
Ophthalmol, 67:206.
Fisher, R. F. and Pettet, B. E. (1972). The postnatal growth of the capsule of the
human crystalline lens. Journal of Anatomy, 112 (2):207–214.
Flory, P. J. (1961). Thermodynamic relations for high elastic materials. Transaction
of the Faraday Society, 57:829–838.
Foster, C. S., Azar, D. T., and Dohlman, C. H. (2005). The Cornea. Scientific
Foundations and Clinical Practice. Lippincott Williams and Wilkins. Philadelphia, USA.
Fung, Y. C. (1993). Biomechanics. Mechanical propeties of living tissues. SpringerVerlag. New York, USA.
Gabelt, B. T., Kaufman, P. L., and Polansky, J. R. (1990). Ciliary muscle muscarinic
binding sites, choline acetyltransferase and acetylcholinesterase in aging rhesus
monkeys. Invest Ophthalmol Vis Sci, 31:2431–2436.
Gabler, B., Winkler-Von-Mohrenfels, C., Dreiss, A. K., Marshall, J., and Lohmann,
C. P. (2002). Vitality of epithelial cells after alcohol exposure during laser-assisted
subepithelial keratectomy flap preparation. J Cataract Refract Surg, 28:1841–
1846.
Gardiner, J. C. and Weiss, J. A. (2003). Subjet-specific finite element analysis of
the human medial collateral ligament during valgus knee loading. J Orthopaed
Res, 21:1098–1106.
Gardiner, J. C., Weiss, J. A., and Rosenberg, T. D. (2001). Strain in the human
medial collateral ligament during valgus lading of the knee. Clin Orthop Relat R,
391:266–274.
Gasser, T. C., Schulze-Bauer, C. A. J., and Holzapfel, G. A. (2002). A threedimensional finite element model for arterial clamping. ASME J Biomech Eng,
124:355–363.
Gefen, A., Shalom, R., Elad, D., and Mandel, Y. (2009). Biomechanical analysis of
the keratoconic cornea. J Mech Behav Biomed Mater, 2(3):224–36.
BIBLIOGRAFÍA
311
Girard, M. J. A., Downs, J. C., Burgoyne, C. F., and Suh, J. K. F. (2008). Experimental surface strain mapping of porcine peripapillary sclera due to elevations of
intraocular pressure. J Biomech Eng, 130(4):041017.
Glasser, A. (2010). Improved understanding of accommodative anatomy offers hope
for presbyopes. ESCRS Eurotimes, 15(2):13.
Glasser, A. and Campbell, M. C. W. (1998). Presbyopia and the optical changes in
the human crystalline lens with age. Vision Research, 38:209–229.
Glasser, A. and Campbell, M. C. W. (1999). Biometric, optical and physical changes
in the isolated human crystalline lens with age in relation to presbyopia. Vision
Res, 39(11):1991–2015.
Glasser, A., Croft, M. A., Brumback, L., and Kaufman, P. L. (2001). Ultrasound biomicroscopy of the aging rhesus monkey ciliary region. Optom Vis Sci,
78(6):417–24.
Glasser, A. and Kaufman, P. L. (1999). The mechanism of accommodation in primates. Ophthalmology, 106 (5):863–872.
Goncharov, A. V., Nowakowski, M., Sheehan, M. T., and Dainty, C. (2008). Reconstruction of the optical system of the human eye with reverse ray-tracing. Opt
Express, 16(3)):1692–703.
Gray, H. (1858). Henry Gray’s Anatomy of the Human Body. United Kingdom.
Grytz, R. (2008). Numerical modeling and remodeling of human eye tissues as biomechanical structures at multiple scales. PhD thesis, Ruhr-Universitaet Bochum.
Guirao, A., Tejedor, J., and Artal, P. (2004). Corneal aberrations before and after
small-incision cataract surgery. Invest Ophthalmol Vis Sci, 45:4312–4319.
Hafezi, R., Kanellopoulos, J., Wiltfang, R., and Seiler, T. (2007). Corneal collagen
crosslinking with riboflavin and ultraviolet A to treat induced keratectasia after
laser in situ keratomileusis. J Cataract Refract Surg, 33(12):2035–40.
Hayes, D., O’Brart, D., Lamdin, L., Doutch, J., Samaras, K., Marshall, J., and
Meek, K. (2008). Effect of complete epithelial debridement before riboflavinultraviolet-A corneal collagen crosslinking therapy. J Cataract Refract Surg,
34(4):657–61.
Hayes, S., Boote, C., Lewis, J., Sheppard, J., Abahussin, M., Quantock, A. J.,
Purslow, C., Votruba, M., and Meek, K. M. (2007a). Comparative study of
fibrillar collagen arrangement in the corneas of primates and other mammals.
Anat Rec, 290(12):1542–50.
312
Modelado del ojo humano y tratamientos refractivos
Hayes, S., Boote, C., Tuft, S. J., Quantock, A. J., and Meek, K. M. (2007b). A
study of corneal thickness, shape and collagen organisation in keratoconus using
videokeratography and X-ray scattering techniques. Experimental Eye Research,
84(3):423–434.
Heistand, M. R., Pedrigi, R. M., Dziezyc, J., and Humphrey, J. D. (2006). Redistribution of strain and curvature in the porcine anterior lens capsule following a
continuous circular capsulorhexis. J Biomech, 39(8):1537–1542.
Hermans, E. A., Dubbelman, M., van der Heijde, G. L., and Heethaar, R. M. (2006).
Estimating the external force acting on the human eye lens during accommodation
by finite element modelling. Vision Research, 46:3642–3650.
Hermans, E. A., Dubbelman, M., van der Heijde, G. L., and Heethaar, R. M. (2008).
Change in the accommodative force on the lens of the human eye with age. Vision
Research, 48:119–126.
Hermans, E. A., Pouwels, P. J. W., Dubbelman, M., Kuijer, J. P. A., van der Heijde,
R. G. L., and Heethaar, R. M. (2009). Constant volume of the human lens and
decrease in surface area of the capsular bag during accommodation: an MRI and
Scheimpflug study. Invest Ophthalmol and Vis Sci., 50:281–289.
Herrmann, L. R. and Peterson, F. E. (1968). A numerical procedure for viscoelastic
stress analysis. In: Proceedings of the Seventh Meeting of ICRPG Mechanical
Behaviour Working Group. Orlando.
Heys, K. R., Cram, S. L., and Truscott, R. J. W. (2004). Massive increase in the
stiffness of the human lens nucleus with age: the basis for presbyopia. Molecular
Vision, 10:956–63.
Hibbit, Karlsson, and Sorensen, I. (2005). Abaqus user’s guide, v. 6.5. HKS inc.
Pawtucket, RI, USA.
Hirokawa, S. and Tsuruno, R. (2000). Three-dimensional deformation and stress distribution in an analytical/computational model of the anterior cruciate ligament.
J Biomech, 33:1069–1077.
Hjortdal, J. O. and Jensen, P. K. (1992). In situ mechanical behavior of the human cornea as evaluated by simultaneous measurements of corneal strain, corneal
surface contour, and corneal thickness. Invest. Ophthalmol. Vis. Sci., 33:895.
Hjortdal, J. O. and Jensen, P. K. (1995). In vitro measurement of corneal strain,
thickness, and curvature using digital image processing. Acta Ophthalmol. Scand.,
73:5–11.
BIBLIOGRAFÍA
313
Hoeltzel, D. A., Altman, P., Buzard, K. A., and Choe, K. (1992). Strip extensiometry for comparison of the mechanical response of bovine, rabbit and human
corneas. J Biomech. Eng., 114(2):202–15.
Holzapfel, G. A. (2000). Nonlinear Solid Mechanics. Wiley, New York.
Holzapfel, G. A., Gasser, C. T., Sommer, G., and Regitnig, P. (2005). Determination of the layer-specific mechanical properties of human coronary arteries with
non-atherosclerotic intimal thickening, and related constitutive modelling. Am J
Physiol Heart Circ Physiol, 289:H2048–H2058.
Holzapfel, G. A. and Gasser, T. C. (2000). A new constitutive framework for arterial
wall mechanics and a comparative study of material models. J Elasticity, 61:1–48.
Holzapfel, G. A. and Gasser, T. C. (2001). A viscoelastic model for fiber-reinforced
composites at finite strains: Continuum basis, computational aspects and applications. Comput. Methods Appl. Mech. Engrg, 190:4379–4403.
Hughes, T. J. R. (2000). The finite element method: Linear static and dynamic
finite analysis. Dover, New York.
Hughes, T. J. R. and Pister, K. S. (1978). Consistent linearization in mechanics of
solids and structures. Comput Struct, 8:391–397.
Humphrey, J. D. (1995). Mechanics of the arterial wall: Review and directions.
Critical Rev Biomed Engr, 23:1–162.
Humphrey, J. D. (2002). Continuum biomechanics of soft biological tissues. Proc.
R. Soc. Lond. A, 175:1–44.
Iseli, H. P., Thiel, M. A., Hafezi, F., Kampmeier, J., and Seiler, T. (2008). Ultraviolet
A/riboflavin corneal cross-linking for infectious keratitis associated with corneal
melts. Cornea, 27(5):590–4.
Jay, L., Brocas, A., Singh, K., , Kieffer, J. C., Brunette, I., and Ozaki, T. (2008). Determination of porcine corneal layers with high spatial resolution by simultaneous
second and third harmonic generation microscopy. Optics Express, 16(21):16284–
16293.
Jayasuriya, A. C., Ghosh, S., Scheinbeim, J. I., Lubkin, V., Bennett, G., and
Kramer, P. (2003). A study of piezoelectric and mechanical anisotropies of the
human cornea. Biosensors and Bioelectronics, 18:381–387.
Jin, H., Rabsilber, T., Ehmer, A., Borkenstein, A. F., Limberger, I. J., Guo, H., and
Auffarth, G. U. (2009). Comparison of ray-tracing method and thin-lens formula
in intraocular lens power calculations. J Cataract Refract Surg, 35(4)):650–62.
314
Modelado del ojo humano y tratamientos refractivos
Johnson, G. A., Livesay, G. A., Woo, S. L. Y., and Rajagopal, K. I. R. (1996). A
single integral finite strain viscoelastic model of ligaments and tendons. ASME J
Biomech Eng, 118:221–226.
Jones, C. E., Atchison, D. A., Meder, R., and Pope, J. M. (2005). Refractive index
distribution and optical properties of the isolated human lens measured using
magnetic resonance imaging (MRI). Vision Research, 45:2352–2366.
Kaliske, M. (2000). A formulation of elasticity and viscoelasticiy for fibre reinforced
material at small and finite strains. Comput. Methods Appl. Mech. Engrg, 185:225–
243.
Kasprzak, H. T. (2000). New approximation for the whole profile of the human
crystalline lens. Ophthalmic and Physiological Optics, 20:31–43.
Kaufmann, C., Peter, J., Ooi, K., and Phipps, S. (2005). Limbal relaxing incisions
versus on-axis incisions to reduce corneal astigmatism at the time of cataract
surgery. J Cataract Refract Surg, 31:2261–2265.
Küchle, H. J. and Busse, H. (1982). Manual de oftalmologı́a. Salvat, Barcelona.
Kim, S. Y., Sah, W. J., Lim, Y. W., and Hahn, T. W. (2002). Twenty percent alcohol
toxicity on rabbit corneal epithelial cells: electron microscopic study. Cornea,
21:388–392.
Klinkel, S. and Govindjee, S. (2002). Using finite strain 3d-material models in beam
and shell elements. Engineering Computations, 19(8):902–921.
Kohnen, T. (2000). The ASCRS honouring of Albrecht von Graefe. American Society
of Cataract and Refractive Surgery. Graefe’s Archive for Clinical and Experimental Ophthalmology, 238 (9):807.
Kohnen, T. and Koch, D. (2005). Essentials in Ophthalmology. Cataract and Refractive Surgery. Springer. Berlin, Heidelberg.
Komai, Y. and Ushiki, T. (1991a). The three-dimensional organization of collagen
fibrils in the human cornea and sclera. Invest. Ophthalmol. Vis. Sci., 32(8):2244–
2258.
Komai, Y. and Ushiki, T. (1991b). The three-dimensional organization of collagen fibrils in the human cornea and sclera. Invest. Ophthalmol. Visual Sci.,
32(8):2244–2258.
Koretz, J. F., Bertasso, A. M., and Neider, M. W. (1988). Preliminary characterization of human crystalline lens geometry as a function of accommodation and
age. Opt Soc Am Tech Digest Ser, 3:130–133.
BIBLIOGRAFÍA
315
Koretz, J. F., Cook, C. A., and Kaufman, P. L. (2002). Aging of the human lens:
changes in lens shape upon accommodation and with accommodative loss. J. Opt.
Soc. Am. A-Optics & Image Science, 19(1):144–151.
Koretz, J. F. and Handelman, G. H. (1988). How the human eye focuses. Sci Am,
259(1):92–99.
Koretz, J. F., Handelman, G. H., and Brown, N. P. (1984). Analisys of human
crystalline lens curvature as a function of accommodation and age. Vision Res,
24:1141–1151.
Koretz, J. F. and Kaufman, P. L. (1990). Scheimpflug slit-lamp photographic characterization of the aging of the human crystalline lens and the development of
presbyopia. Opt Soc Am Tech Digest Ser, 3:160–163.
Kotecha, A., Elsheikh, A., Roberts, C. R., Zhu, H., and Garway-Heath, D. F. (2006).
Corneal thickness- and age-related biomechanical properties of the cornea measured with the ocular response analyzer. Invest Ophthalmol Vis Sci, 47(12):5337–
47.
Krag, S. and Andreassen, T. T. (1996). Biomechanical measurements of the porcine
lens capsule. Exp. Eye Res., 62:253–260.
Krag, S. and Andreassen, T. T. (2003a). Mechanical properties of the human lens
capsule. Progress in Retinal and Eye Research, 22:749–767.
Krag, S. and Andreassen, T. T. (2003b). Mechanical properties of the human posterior lens capsule. Invest Ophthalmol Vis Sci, 44(2):691–696.
Krag, S., Olsen, T., and Andreassen, T. (1997). Biomechanical characteristics of
the human anterior lens capsule in relation to age. Invest Ophthalmol Vis Sci,
38:357–363.
Kretschmann, H. J., Kaufman, P. L., and Alm, A. (2003). Adler. Fisiologı́a del ojo.
Elsevier España.
Krueger, R. R., Ramos-Esteban, J. C., and Kanellopoulos, A. J. (2008). Staged
intrastromal delivery of riboflavin with UVA cross-linking in advanced bullous
keratopathy: laboratory investigation and first clinical case. J Refract Surg,
24(7):730–6.
Kuszak, J. R., Zoltoski, R. K., and Silvertson, C. (2004). Fibre cell organization in
crystalline lenses. Experimental Eye Research, 78:673–687.
Laguna, D. (2000). Consulta Oftalmológica Virtual. www.e-oftalmologı́a.com.
316
Modelado del ojo humano y tratamientos refractivos
Lanchares, E., Calvo, B., Cristóbal, J. A., and Doblaré, M. (2008). Finite element
simulation of arcuates for astigmatism correction. J Biomech, 41(4):797–805.
Lanir, Y. (1979). A structural theory for the homogeneous biaxial stress-strain
relationship in flat collagenous tissues. J Biomech, 12:423–436.
Levy, N. S. (2000). Comparing MRIs with movement artifact (e-letter). Available
at http://www.iovs.org/cgi/eletters/40/6/1162. Invest Ophthalmol Vis Sci.
Lin, R. C. and Schomburg, U. (2003). A finite-viscoelastic-elastoplastic material law
with damage: theoretical and numerical aspects. Comput. Methods Appl. Mech.
Engrg, 192:1591–1627.
Liu, J. and Roberts, C. R. (2005). Influence of corneal biomechanical properties
on intraocular pressure measurement: quantitative analysis. J Cataract Refract
Surg, 31:146–155.
Ljubimova, D., Eriksson, A., and Bauer, S. (2007). Aspects of eye accommodation
evaluated by finite elements. Biomechanics and Modeling in Mechanobiology,
7(2):139–150.
Loayza, F. (1996). Atlas de Anatomı́a Ocular. http://sisbib.unmsm.edu.pe/
bibVirtual/Libros/medicina/Atlas-Ocular/orbita1.htm.
Lombardo, M., Lombardo, G., Manzulli, M., and Serrao, S. (2006). Response of
the cornea for up to four years after photorefractive keratectomy for myopia. J
Refract Surg, 22(2):178–86.
Luce, D. A. (2005). Determining in vivo biomechanical properties of the cornea with
an ocular response analyzer. J Cataract Refract Surg, 31:156–162.
Ludwig, K. (2001). Zonular apparatus, anatomy, biomechanichs and coupling to the
lens. In: Current aspects of human accommodation. R. Guthoff & K. Ludwig
(Eds.). Kaden Verlag, Heidelberg.
Manns, F., Fernandez, V., Zipper, S., Sandadi, S., Hamaoui, M., Hoc, A., and Parel,
J.-M. (2004). Radius of curvature and asphericity of the anterior and posterior
surface of human cadaver crystalline lenses. Experimental Eye Research, 78:39–51.
Manns, F., Parel, J. M., Denham, D., Billotte, C., Ziebarth, N., Borja, D., Fernandez, V., Aly, M., Arrieta, E., Ho, A., and Holden, B. (2007). Optomechanical
response of human and monkey lenses in a lens stretcher. Invest Ophthalmol Vis
Sci, 48:3260–3268.
Marcos, S., Rosales, P., Llorente, L., and Jiménez-Alfaro, I. (2007). Change in
corneal aberrations after cataract surgery with 2 types of aspherical intraocular
lenses. J Cataract Refract Surg, 33:217–226.
BIBLIOGRAFÍA
317
Marquardt, D. W. (1963). An algorithm for least-squares estimation of nonlinear
parameters. Siam J Appl Math, 11:431–441.
Marsden, J. E. and Hughes, T. J. R. (1994). Mathematical Foundations of Elasticity.
Dover, New York.
Martins, P., Pena, E., Calvo, B., Doblare, M., Mascarenhas, T., Jorge, R. N., and
Ferreira, A. (2008). Prediction of nonlinear elastic behavior of vaginal tissue:
Experimental results and model formulation. Ann Biomed Eng, Submitted.
Meek, K. M., Blamires, T., Elliot, G. F., Gyi, T. J., and Nave, C. (1987). The
organization of collagen fibrils in the human corneal stroma: a synchrotron X-ray
diffraction study. Curr. Eye Res., 6:841–846.
Meek, K. M. and Boote, C. (2009). The use of X-ray scattering techniques to quantify
the orientation and distribution of collagen in the corneal stroma. Progress in
Retinal and Eye Research, 28:369–392.
Meek, K. M. and Newton, R. H. (1999). Organization of collagen fibrils in the
corneal stroma in relation to mechanical properties and surgical practice. Journal
of Refractive Surgery, 15:695–699.
Merodio, J. and Goicolea, J. M. (2007). On thermodynamically consistent constitutive equations for fiber-reinforced nonlinearly viscoelastic solids with apllication
to biomechanics. Mech Res Commun, 34:561–571.
Moreno-Barriuso, E., Lloves, J. M., Marcos, S., Navarro, R., Llorente, L., and Barbero, S. (2001). Ocular aberrations before and after myopic corneal refractive
surgery: Lasik-induced changes measured with laser ray tracing. Invest Ophthalmol Vis Sci, 42:1396–1403.
Munnerlyn, C. R., Koons, S. J., and Marshall, J. (1988). Photorefractive keratectomy: A technique for laser refractive surgery. J. Cataract Refract. Surg.,
14:46–52.
Navarro, R., Gonzalez, L., and Hernández, J. L. (2005). Representación canónica
de la superficie corneal. topografı́a promedio. Ver y oı́r, 24:594–606.
Navarro, R., González, L., and Hernández, J. L. (2006a). Optics of the average normal cornea from general and canonical representations of its surface topography.
J. Opt Soc Am, 23(2):219–232.
Navarro, R., González, L., and Hernández-Matamoros, J. L. (2006b). On the prediction of optical aberrations by personalized eye models. Optometry, 83:371–381.
318
Modelado del ojo humano y tratamientos refractivos
Navarro, R., Palos, F., and González, L. M. (2007a). Adaptative model of the
gradient index of the human lens I. Formulation and model of the aging ex-vivo
lens. J. Opt Soc Am, 24(8):2175–2185.
Navarro, R., Palos, F., and González, L. M. (2007b). Adaptative model of the
gradient index of the human lens II. Optics of the accommodating aging lens. J.
Opt Soc Am, 24(9):2911–2920.
Navarro, R., Palos, F., Lanchares, E., Calvo, B., and Cristóbal, J. A. (2009). Lowerand higher-order aberrations predicted by an optomechanical model of arcuate
keratotomy for astigmatism. J Cataract Refract Surg, 35(1):158–65.
Newton, R. H. and Meek, K. M. (1998). The integration of the corneal and limbal
fibrils in the human eye. Biophysical Journal, 75:2508–2512.
Nguyen, T. D., Jones, R. E., and Boyce, B. L. (2008). A nonlinear anisotropic
viscoelastic model for the tensile behavior of the corneal stroma. J. Biomed.
Eng., 130:041020.
Nichamin, L. D. (2006). Astigmatism control. Ophthalmol Clin North Am, 19:485–
493.
Nyquist, G. W. (1968). Rheology of the cornea: Experimental techniques and results.
Exp. Eye Res., 7:183–188.
Ogden, R. W. (1996). Non-linear Elastic Deformations. Dover, New York.
Ogden, R. W. (2001). Nonlinear elasticity, anisotropy, material stability and residual
stresses in soft tissue. Lecture notes. CISM Course on Biomechanics of Soft
Tissue, Udine.
Ortiz, D., Piñero, D., Shabayñek, M. H., Arnalich, F., and Alió, J. L. (2007).
Corneal biomechanical properties in normal, post-laser in situ keratomileusis, and
keratoconic eyes. J Cataract Refract Surg, 33:1371–1375.
Pallikaris, I. G., Katsanevaki, V. J., Kalyvianaki, M. I., and Naoumidi, I. I. (2003).
Advances in subepithelial excimer refractive surgery techniques: epi-lasik. Curr
Opin Ophthalmol, 14:207–212.
Pallikaris, I. G., Papatzanaki, M. E., Siganos, D. S., and Tsilimbaris, M. K. (1991).
A corneal flap technique for laser in situ keratomileusis. human studies. Arch
Ophthalmol, 109:1699–702.
Pallikaris, I. G., Papatzanaki, M. E., Stathi, E. Z., Frenschock, O., and Georgiadis,
A. (1990). Laser in situ keratomileusis. Lasers Surg Med., 10(5):463–468.
BIBLIOGRAFÍA
319
Palomino, C. (2008). Procedimientos combinados en cirugı́a faco-refractiva. Monografı́as de la Sociedad Española de Cirugı́a Ocular Implanto-Refractiva. Madrid,
Spain.
Pandolfi, A., Fotia, G., and Manganiello, F. (2009). Finite element simulations of
laser refractive corneal surgery. Engineering with Computers, 25:15–24.
Pandolfi, A. and Manganiello, F. (2006). A material model for the human cornea:
constitutive formulation and numerical analysis. Biomech Model Mechanobiol,
5(4):237–46.
Peña, E., Calvo, B., Martinez, M. A., and Doblaré, M. (2006a). A three-dimensional
finite element analysis of the combined behavior of ligaments and menisci in the
healthy human knee joint. J Biomech, 39(9):1686–701.
Peña, E., Calvo, B., Martı́nez, M. A., and Doblaré, M. (2007a). An anisotropic viscohyperelastic model for ligaments at finite strains: Formulation and computational
aspects. Int J Solids Struct, 44:760–778.
Peña, E., Martinez, M. A., Calvo, B., and Doblaré, M. (2006b). On the numerical
treatment of initial strains in soft biological tissues. Int J Numer Meth Engng,
68:836–860.
Peña, E., Pérez-Del-Palomar, A., Calvo, B., Martinez, M. A., and Doblaré, M.
(2007b). Computational modelling of diarthrodial joints. Physiological, pathological and pos-surgery simulations. Arch Comput Method Eng, 14(1):47–91.
Pedrigi, R. M., David, G., Dziezye, J., and Humphrey, J. D. (2007). Regional
mechanical properties and stress analysis of the human anterior lens capsule.
Vision Research, 47:1781–1789.
Perkins, E. S. and Hill, D. W. (1981). Fundamentos cientı́ficos de la oftalmologı́a.
Salvat, Barcelona.
Pesudovs, K., Dietze, H., Stewart, O. G., Noble, B. A., and Cox, M. J. (2005).
Effect of cataract surgery incision location and intraocular lens type on ocular
aberrations. J Cataract Refract Surg, 31:725–734.
Peyman, G. A., Larson, B., Raichand, M., and Andrews, A. H. (1980). Modification
of rabbit corneal curvature with use of carbon dioxide laser burns. Ophthalmic
Surg., 11(5):325–329.
Pinsky, P. M. and Datye, V. (1991). A microstructurally-based finite element model
of the incised human cornea. J Biomech, 24(10):907–922.
320
Modelado del ojo humano y tratamientos refractivos
Pinsky, P. M., van der Heide, D., and Chernyak, D. (2005). Computational modeling
of mechanical anisotropy in the cornea and sclera. J Cataract refract surg, 31:136–
145.
Pioletti, D. (1997). Viscoelastic properties of soft tissues. PhD thesis, The University
of Lausanne.
Popiolek-Masajada, A. and Kasprzak, H. (2002). Model of the optical system of the
human eye during accommodation. Ophthalmic Physiol Opt, 22(3):201–8.
Pérez-Del-Palomar, A. and Doblaré, M. (2006). On the numerical simulation of the
mechanical behaviour of articular cartilage. Int J Numer Meth Engng, 67:244–
1271.
Provenzano, P. P., Lakes, R. S., Corr, D. T., and Vanderby, R. (2002). Application
of nonlinear viscoelastic models to describe ligament behavior. Biomech Model
Mechanobiol, 1:45–47.
Puso, M. A. and Weiss, J. A. (1998). Finite element implementation of anisotropic
quasilinear viscoelasticity. ASME J Biomech Eng, 120:162–170.
Rashid, E. R. and Waring, G. O. (1989). Complications of radial and transverse
keratotomy. Surv Ophthalmol., 34(2):73–106.
Richards, C. D. (2005). Fisiologı́a Humana. La base de la Medicina. 2a Edición.
Masson.
Roberts, C. R. (2000). The cornea is not a piece of plastic. J Refract Surg, 16(4):407–
13.
Rodriguez, E. K., Hoger, A., and McCulloch, A. (1994). Stress-dependent finite
growth in soft elastic tissues. J Biomech, 27:455–467.
Rohen, J. W. (1979). Scanning electron microscopic studies of the zonular apparatus
in human and monkey eyes. Invest Ophthalmol Vis Sci, 18:133–144.
Rosen, A. M., Denham, D. B., Fernandez, V., Borja, D., Ho, A., Mannis, F., Parel,
J. M., and Augusteyn, R. C. (2006). In vitro dimensions and curvatures of human
lenses. Vision Research, 46:1002–1009.
Roveri, N., Ripamonti, A., Bigi, A., Volpin, D., and Giro, M. G. (1979). X-ray
difractions study of bovine lens capsule collagen. Biochim Biophys, 626:356–355.
Saad, A., Lteif, Y., Azan, E., and Gatinel, D. (2009). Biomechanical properties of
keratoconus suspect eyes. Invest Ophthalmol Vis Sci, 30:En prensa.
BIBLIOGRAFÍA
321
Sandia National Laboratories (2006). Cubit 10.1 User Documentation. Computational Modeling Sciences Department.
/http://cubit.sandia.gov/helpversion10.1/cubithelp.htmS.
Schachar, R. A. (1992). Cause and treatment of presbyopia with a method for
increasing the amplitude of accommodation. Ann Ophthalmol, 24:445–452.
Schachar, R. A., Huang, T., and Huang, X. (1993). Mathematic proof of Schachar’s
hypothesis of accommodation. Annals of Ophthalmology Clinics, 33 (2):103–112.
Schachar, R. A., Kamangar, F., and Pierscionek, B. K. (2008). Changes in lens
dimensions and refractive index with age and accommodation. Optom Vis Sci.,
85:281–282.
Schneider, H., Bacskulin, A., and Guthoff, R. (2001). History of Accommodation
Research. In: Current Aspects of Human Accommodation. Guthoff, R., Ludwig,
K. (Eds.). Kaden Verlag, Heidelberg.
Schwiegerling, J. and Snyder, R. W. (1998). Custom photorefractive keratectomy
ablations for the correction of spherical and cylindrical refractive error and higherorder aberration. J Opt Soc Am A, 15(9):2572–2579.
Seiler, T., Matallana, M., Sendler, S., and Bende, T. (1992). Does Bowman’s layer
determine the biomechanical properties of the cornea? Refract. Corneal Surg.,
8:139–142.
Shannon, R. (1997). The Art and Science of Optical Design. Cambridge University
Press.
Shin, T. J., Vito, R. P., Johnson, L. W., and McCarey, B. E. (1997). The distribution
of strain in the human cornea. J Biomech, 30:497–503.
Siedlecki, D., Kasprzak, H., and Pierscionek, B. K. (2004). Schematic eye with a
gradient-index lens and aspheric surfaces. Opt Lett, 29(11):1197–9.
Siganos, C. S., Kymionis, G. D., Astyrakakis, N., and Pallikaris, I. G. (2002). Management of corneal ectasia after laser in situ keratomileusis with intacs. Journal
of Refractive Surgery, 18(1):43–46.
Simo, J. C. (1987). On a fully three-dimensional finite-strain viscoelastic damage
model: Formulation and computational aspects. Comput. Methods Appl. Mech.
Engrg, 60:153–173.
Simo, J. C. and Hughes, T. J. R. (1998). Computational Inelasticity. SpringerVerlag, New York.
322
Modelado del ojo humano y tratamientos refractivos
Simo, J. C. and Taylor, R. L. (1985). Consistent tangent operators for rateindependent elastoplasticity. Comput. Methods Appl. Mech. Engrg, 48:101–118.
Simo, J. C. and Taylor, R. L. (1991). Quasi-Incompresible Finite Elasticity in Principal Stretches. Continuum Basis and Numerical Algorithms. Comput. Methods
Appl. Mech. Engrg, 85:273–310.
Sjontoft, E. and Edmund, C. (1987). In vivo determination of young’s modulus of
the cornea. Bulletin of Mathematical Biology, 49:217–232.
Skalak, R. (1981). Growth as a finite displacement field. In: D.E. Carlson and
R.T. Shields, Editors, IUTAM Symposium on Finite Elasticity, Martinus Nijhoff
(1981), pp. 348–355.
Smith, G., Bedggood, P., Ashman, R., Daaboul, M., and Metha, A. (2008). Exploring ocular aberrations with a schematic human eye model. Optom Vis Sci,
85(5)):330–40.
Spencer, A. J. M. (1954). Theory of invariants. In Continuum Physics, pages 239–
253. Academic Press, New York.
Spoerl, E., Huhle, M., and Seiler, T. (1998). Induction of cross-links in corneal
tissue. Exp Eye Res, 66(1):97–103.
Spoerl, E., Mrochen, M., Sliney, D., Trokel, S., and Seiler, T. (2007). Safety of
UVA-riboflavin cross-linking of the cornea. Cornea, 26(4):385–9.
Stafford, M. J. (2001). The histology and biology of the lens. Association of Optometrists, pages 23–30.
Streeten, B. W. (2003). Chapter 14: Anatomy of the zonular apparatus. In: Duane’s
Clinical Ophthalmology. W. Tasman and E. A. Jaeger. Lippincott Williams and
Wilkins, Hangerstown.
Strenk, S. A., Semmlow, J. L., Strenk, L. M., Muñoz, P., Gronlund-Jacob, J., and
DeMarco, J. K. (1999). Age-related changes in human cliliary muscle and lens:
a magnetic resonance imaging study. Investigative Ophthalmology and Visual
Science, 40:1162–1169.
Strenk, S. A., Strenk, L. M., and Guo, S. (2010). Magnetic resonance imaging of
the antoposterior position and thickness of the aging, accommodating, phakic and
pseudophakic ciliary muscle. J Cataract Refract Surg, 36:235–241.
Strenk, S. A., Strenk, L. M., and Koretz, J. F. (2005). The mechanism of presbyopia.
Progress in Retinal and Eye Research, 24:379–393.
Structural Dynamics Research Corporation (2001). I-Deas Tutorials. EDS.
BIBLIOGRAFÍA
323
Studer, H., Larrea, X., Riedwyl, H., and Büchler, P. (2010). Biomechanical model
of human cornea based on stromal microstructure. J Biomech, En prensa.
Taber, L. A. (1995). Biomechanics of growth, remodeling, and morphogenesis. Appl
Mech Rev, 48:487–545.
Taber, L. A. and Eggers, D. W. (1996). Theorical study of stress-modulated growth
in the aorta. J Theor Biol, 180:343–357.
Taber, L. A. and Humphrey, J. D. (2001). Stress-modulated growth, residual stress,
and vascular heterogeneity. ASME J Biomech Eng, 123:528–535.
Tamm, E., Kaufman, P. L., and Lütjen-Drecoll, E. (1988). Age changes in rhesus
monkey ciliary muscle: light and electron microscopy. Exp Eye Res, 47:885–899.
Tamm, E., Lütjen-Drecoll, E., Jungkunz, W., and Rohen, J. W. (1991). Posterior
attachment of ciliary muscle in young, accommodating old, presbyopic monkeys.
Invest Ophthalmol Vis Sci, 32(5):1678–1692.
Taylor, R. L., Pister, K. S., and Goudreau, G. L. (1970). Thermomechanical analysis
of vioscoelastic solids. Int J Numer Methods Engrg, 2:45–59.
Velinsky, S. A. and Bryant, M. (1992). On the computer-aided and optimal design
of keratorefractive surgery. Refractive Corneal Surgery, 8:173–183.
Vito, R. P., Shin, T. J., and McCarey, B. E. (1989). A mechanical model of the
cornea: The effects of physiological and surgical factors on radial keratotomy
surgery. Refract. Corneal Surg., 5(2):82–88.
von Helmholtz, H. (1924). Helmholtz’s treatise on physiological optics (1909). Mechanism of accommodation. Southall J. P. C. (ed.) Vols. I and II. Dover Publications.
New York.
Wang, L., Misra, M., and Koch, D. D. (2003). Peripheral corneal relaxing incisions
combined with cataract surgery. J Cataract Refract Surg, 29:712–722.
Wang, Y., Zhao, K. X., He, J. C., Jin, Y., and Zuo, T. (2007). Ocular higher-order
aberrations features analysis after corneal refractive surgery. Chin Med J (Engl),
120(4)):269–73.
Weale, R. A. (1989). Presbyopia toward the end of the 20th century. Surv. Ophthalmol., 34 (1):15–30.
Weale, R. A. (1992). The senescence of human vision. Oxford: Oxford University
Press, page 61.
324
Modelado del ojo humano y tratamientos refractivos
Weeber, H. A., Eckert, G., Pechhold, W., and van der Heijde, R. G. (2007). Stiffness
gradient in the crystalline lens. Graefe’s Arch Clin Exp Ophthalmol, 245:1357–
1366.
Weeber, H. A., Eckert, G., Soergel, F., Meyer, C. H., Pechhold, W., and van der
Heijde, R. G. (2005). Dynamic mechanical properties of human lenses. Exp Eye
Res., 80(3):425–34.
Wei, X. and Thibos, L. (2008). Modeling the eye’s optical system by ocular wavefront
tomography. Opt Express, 16(25):2490–502.
Weiss, J. A., Maker, B. N., and Govindjee, S. (1996). Finite element implementation
of incompressible, transversely isotropic hyperelasticity. Comput. Methods Appl.
Mech. Engrg, 135:107–128.
Williams, P. L. and Bannister, L. H. (1998). Anatomı́a de Grey: bases anatómicas
de la medicina y la cirugı́a. Edición 38. Harcourt Brace.
Wilson, R. S. (1997). Does the lens diameter increase or decrease during accommodation? human accommodation studies: a new technique using infrared retroillumination video photography and pixel unit measurements. Trans Am Ophthalmol Soc, 95:261–267.
Wollensak, G. (2006). Crosslinking treatment of progressive keratoconus: new hope.
Curr Opin Ophthalmol, 17:356–360.
Wollensak, G., Aurich, H., Pham, D. T., and Wirbelauer, C. (2007). Hydration
behavior of porcine cornea crosslinked with riboflavin and ultraviolet A. J Cataract
Refract Surg, 33(3):516–21.
Wollensak, G. and Iomdina, E. (2009a). Biomechanical and histological changes
after corneal crosslinking with and without epithelial debridement. J Cataract
Refract Surg, 35:540–546.
Wollensak, G. and Iomdina, E. (2009b). Long-term biomechanical properties of
rabbit cornea after photodynamic collagen crosslinking. Acta Ophthalmol, 87:48–
51.
Wollensak, G., Spoerl, E., and Seiler, T. (2003a). Riboflavin/ultraviolet-A-induced
crosslinking for the treatment of keratoconus. Am J Ophthalmol, 135:620–627.
Wollensak, G., Spoerl, E., and Seiler, T. (2003b). Stress-strain measurements of
human and porcine corneas after riboflavin/ultraviolet- A-induced cross-linking.
J Cataract Refract Surg, 29:1780–1785.
Woo, S. L., Kobayashi, A. S., Schlegel, W. A., and Lawrence, C. (1972). Nonlinear
material properties of intact cornea and sclera. Exp Eye Res, 14(1):29–39.
BIBLIOGRAFÍA
325
Young, B. and Heath, J. W. (2000). Wheater´s. Histologı́a funcional. 4a Edición.
Elsevier España.
Zeng, Y., Yang, J., Huang, K., Lee, Z., and Lee, X. (2001). A comparison of biomechanical properties between human and porcine córnea. J Biomech, 34(4):533–7.
Zhivotovsky, D. S. and Vishnevetsky, E. (1971). Eye refraction changes secondary to
implantation of intracorneal plastic lenses in experiments and in clinical practice.
Vestn Oftalmol.
Ziebarth, N. M., Borja, D., Arrieta, E., Aly, M., Manns, F., Dortonne, I., Nankivil,
D., Jain, R., and Parel, J. M. (2008). Role of the lens capsule on the mechanical accommodative response in a lens stretcher. Invest Ophthalmol Vis Sci, 49(10):4490–
6.
326
Modelado del ojo humano y tratamientos refractivos
Índice alfabético
A
C
Aberración
de frente de onda, 86
de rayo, 86
longitudinal, 87
transversal, 87
ACD, 27
Acomodación, 51
Acoplamiento, 91, 98
Afaquia, 58, 67
ALK, 92
Ambliopı́a, 59
Ametropı́a, 25, 57
axial, 57
Anomalı́a de refracción, 58
Aparato
dióptrico, 51
lagrimal, 47
Ápex, 28
Astenopı́a, 59
Astigmatismo, 58
a favor de la regla, 62
en contra de la regla, 62
mixto, 61
oblı́cuo, 62
regular, 61
Auto-refractómetro, 68
Cámara
anterior, 27, 31
posterior, 27, 31
vı́trea, 27
Cápsula, 33
de Tenon, 38, 44
vaginal del bulbo ocular, 38
Córnea, 25, 28
Córtex, 35
Cı́rculo de mı́nima confusión, 215
Capa
epitelial interna, 39
epitelial pigmentaria externa, 39
externa, 25
fibrosa, 25
interna, 25, 40
media, 25
vascular, 25
Catarata, 93
congénita, 94
senil, 94
traumática, 94
Cejas, 46
CH, 73
Chaudhry, 176
Cirugı́a
incisional, 67
lamelar, 91
refractiva, 67
Conducto
de Schlemm, 28
hialoideo de Cloquet, 37
B
BFS, 71, 192
Bicónica, 192
Biomicroscopı́a, 70
327
328
Modelado del ojo humano y tratamientos refractivos
Conjuntiva, 43
Coroides, 25, 39
CRF, 73
Criptas, 40
Cristalino, 32
Cross-linking, 108, 117
Cuerpo
ciliar, 25, 27, 32
vı́treo, 27, 37
CXL, 108, 117
D
Dacriocisto, 47
Deshicencias, 40
Diagrama de impacto, 86
Difracción, 79
Dioptrı́a, 51
Dirección de rayo, 79
Distancia focal, 51
E
extracapsular, 94
intracapsular, 94
F
Fóvea, 42
Facoemulsificación, 67, 95
Facoemulsificador, 95
Factor de Resistencia Corneal, 73
Fascias, 45
Fibras
del cristalino, 35
primarias, 36
secundarias, 36
Fondos de saco, 43
Fornix conjuntivales, 43
Fosa lenticular, 37
Fotorreceptores, 41
Frente de onda, 79
G
Glaucoma, 32
Ectasia, 106
Edema, 127
Emetropı́a, 51
Endotelio corneal, 31
Episclera, 38
Epitelio
corneal, 29
del cristalino, 34
pigmentario retiniano externo, 40
Esclera, 25, 38
Espasmo de acomodación, 58
Estado
acomodado, 52
desacomodado, 52
Estroma
corneal, 29
escleral, 38
Extracción
H
Haze, 105
Hipermetropı́a, 57
axial, 58
latente, 59
manifiesta, 59
Histéresis corneal, 73, 74
HOA, 213
Humor
acuoso, 27, 31
vı́treo, 27, 37
I
ICRS, 108
ÍNDICE ALFABÉTICO
Incisiones
enfrentadas, 99
pareadas, 99
Índice de refracción, 49
IOPCC , 74
IOPG , 74
Iris, 25, 40
L
329
de paquimetrı́a, 71
queratométrico, 72
tangencial, 72
Membrana
conjuntiva, 43
de Bowman, 29
de Descemet, 31
esclerótica, 25, 38
hialoidea, 37
Meridianos principales astigmáticos, 61
Microqueratomo, 91
Microscopı́a
confocal, 77
especular, 76
Miopı́a, 57
Molestia astenóptica, 65
Lágrima, 47
Lámina
elástica posterior, 31
fusca, 39
Lámpara de hendidura, 70
Lamela, 29
LASIK, 93
N
Lente
de contacto, 66
Núcleo, 35
intraocular, 67
Nervio óptico, 27
Lentillas, 66
Neumotonómetro, 69
Ley de Snell, 50, 79
Ligamento suspensorio del cristalino, 27,
32
O
Limbo, 28
LIO, 67
OCT, 78
Longitud
Ocular Response Analyzer, 73
axial, 51
OPL, 80
de trayectoria óptica, 80
Optotipo, 66
ORA, 73
Ora serrata, 40
M
Órbita, 24
Orbscan, 70
Mácula lútea, 42
Órganos anexos, 43
Músculo ciliar, 27, 32, 39
Músculos
oblı́cuos, 44
oculares, 44
rectos, 44
Mapa
axial, 72
de elevación, 71
P
Párpados, 46
Paquı́metro, 73
Patrones topográficos de astigmatismo,
62
330
Modelado del ojo humano y tratamientos refractivos
PIO, 25, 68
Plano
axial, 22
coronal, 22
frontal, 22
horizontal, 22
sagital, 22
transversal, 22
Planos anatómicos, 22
Point Spread Fuction, 86
Polarización, 78
Porción epitelial, 39
Preacondicionamiento, 131
Presbicia, 52, 58, 63
Presión intraocular, 25, 68
PRK, 93
Proceso
de acomodación, 53
de desacomodación, 54
Procesos ciliares, 27, 32, 39
Profundidad de cámara anterior, 27
PSF, 86
Punto
ciego, 42
focal, 51
remoto, 51
Pupila, 31, 40
Q
Queratómetro, 68
Queratocono, 108
R
Rayo, 78
posición de, 79
principal, 80
Reflexión, 79
Refracción, 49, 79
Refractómetro, 68
Residuo, 191
Retina, 25, 40
sensorial interna, 40
Riboflavina, 118
RK, 92
S
Saco
capsular, 33
lagrimal, 47
Saliencias, 40
Segmentos intraestromales, 108, 110
Snell, Ley de, 50, 79
Sturm, intervalo de, 213
Superficie
base, 191
bicónica, 192
regular, 191
tórica, 192
Suturas, 36
Swelling, 127
T
Teorı́a
de Coleman, 56
de Helmholtz, 52, 53
de Schachar, 56
Tomografı́a, 78
de Coherencia Óptica, 78
Tonómetro, 68
de Goldmann, 69
de Perkins, 69
Tonometrı́a, 25
de aplanación, 69
Topógrafo, 70
Topografı́a, 71
U
ÍNDICE ALFABÉTICO
Úvea
anterior, 25
posterior, 25, 39
V
Válvula de Horner, 48
Vı́as laterales excretoras, 48
Vı́treo, humor, 37
Vista cansada, 58
Z
Zónula, 27
de Zinn, 27, 32
Zónulas, 32
Zona óptica, 98, 212
Zonula ciliaris, 27, 32
331