Corriente alterna - IES Gabriela Mistral
Anuncio

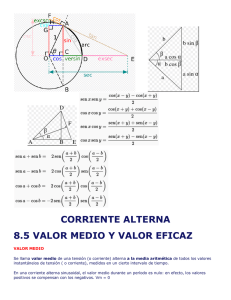
MÁQUINAS DE CORRIENTE ALTERNA - Página 1 Corriente alterna Introducción. Definiciones. Una corriente alterna senoidal es aquella que cambia de sentido en el tiempo y que toma valores según la función matemática seno, repitiéndose de forma periódica. Esto significa que, a diferencia de la corriente continua, las la polaridad cambia periódicamente, circulando las cargas en un sentido durante un tiempo y el sentido contrario durante notro tiempo. Además, el valor de la tensión toma distintos valores, tanto positivos como negativos en cada fracción del tiempo. Características de la señal alterna A continuación se indican otros valores significativos de una señal sinusoidal: - Frecuencia ( f ): Es el número de veces que se repite un ciclo en un segundo. Se mide en Hertzios [Hz], en Europa es de 50 Hz. Hay países en los que la frecuencia es 60 Hz. f = 1 / T (Hz) - Período ( T ): Es el tiempo que tarda en producirse un ciclo, en los países donde la frecuencia es de 50 Hz el ciclo de la tensión de red es de 1/50 = 0,02 segundos, es decir, cada 20 ms se repite la forma de onda. Se representa con la letra T y se mide en segundos. T = 1 / f (seg.) - Valor instantáneo ( V(t)): Es el valor que toma la señal (tensión o intensidad) en un instante, t, determinado. V(t) = Vmax * sen(w t) Donde w es la velocidad angular o pulsación, medida en radianes por segundo: w = 2 π rad/seg. - Valor máximo o amplitud (Vmax): Es el máximo valor que toma la señal en un periodo, coincide con el valor de cresta o picos de la señal. Ve representa por una letra mayúscula con el subíndice max. - Valor pico a pico (Vpp): Diferencia entre su pico o máximo positivo y su pico negativo. MÁQUINAS DE CORRIENTE ALTERNA - Página 2 - Valor medio (Vmed): Valor del área que forma con el eje de abcisas partido por su período. El valor medio se puede interpretar como la componente de continua de la onda sinusoidal. El área se considera positiva si está por encima del eje de abcisas y negativa si está por debajo. Como en una señal sinusoidal el semiciclo positivo es idéntico al negativo, su valor medio es nulo. Por eso el valor medio de una onda sinusoidal se refiere a un semiciclo. Mediante el cálculo integral se puede demostrar que su expresión es la siguiente: - Valor eficaz (V): Su importancia se debe a que este valor es el que produce el mismo efecto calorífico que su equivalente en corriente continua. Matemáticamente, el valor eficaz de una magnitud variable con el tiempo, se define como la raíz cuadrada de la media de los cuadrados de los valores instantáneos alcanzados durante un período En la literatura inglesa este valor se conoce como R.M.S. (root mean square, valor cuadrático medio), y de hecho en matemáticas a veces es llamado valor cuadrático medio de una función. En el campo industrial, el valor eficaz es de gran importancia ya que casi todas las operaciones con magnitudes energéticas se hacen con dicho valor. De ahí que por rapidez y claridad se represente con la letra mayúscula de la magnitud que se trate (I, V, P, etc.). Matemáticamente se demuestra que para una corriente alterna senoidal el valor eficaz viene dado por la expresión: √ Ventajas de la señal alterna: Frente a la corriente continua, la alterna presenta las siguientes ventajas: - Los generadores de CA (alternadores) son más eficaces y sencillos que los de CC (dinamos). - La tecnología necesaria para el transporte de energía a grandes distancias es mucho más económica y accesible en alterna que en continua. - Los receptores de CA son más numerosos y utilizables en casi todas las aplicaciones. - La conversión de CA en CC no presenta complicaciones. Además, frente a otros tipos de onda, la señal senoidal tiene las siguientes propiedades: - La función seno se define perfectamente mediante su expresión matemática. - Es fácil de operar. - Se genera en los alternadores sin grandes dificultades. - Su elevación y reducción, necesarias para reducir las pérdidas de energía, se realiza con altos rendimientos y bajo coste mediante los transformadores. Componentes en C.A. Resistencia, Condensador y Bobina En corriente alterna existen componentes cuya oposición al paso de corriente es proporcional a la frecuencia de la corriente, de forma que al variar esta presentan un valor de resistencia distinto. A esa resistencia, que es variable con la frecuencia, se le llama impedancia ( Z ) y suele estar constituida por dos términos: la resistencia, que no varía con la frecuencia y la reactancia ( X ) que es el término que indica la resistencia que presenta un determinado componente para una frecuencia . Se cuantifica mediante un número complejo: Z = R + jX MÁQUINAS DE CORRIENTE ALTERNA - Página 3 En el que: Z es la impedancia del elemento en alterna medida en Ω R es la resistencia del elemento en alterna medida en Ω X es la reactancia del elemento en alterna medida en Ω La reactancia del elemento recibe el nombre de inductancia ( XL ) cuando es producida por una bobina y capacitancia ( XC ) cuando la produce un condensador. Ambas reactancias dependen de un valor característico del elemento (el coeficiente de autoinducción L en las bobinas y la capacidad C en los condensadores) y de la frecuencia, valiendo: A continuación veremos la diferencia entre ambas. Circuito con resistencia pura. Una resistencia pura, conectada a un generador de corriente alterna, la tensión y la intensidad se encuentran en fase entre ellas, por lo que su comportamiento es igual al de una corriente continua del mismo valor eficaz. Así, para calcular la intensidad podemos aplicar la ley de Ohm sin restricciones: Circuito con bobina pura. La mayor parte de los receptores están formados por bobinas, especialmente en aquellos en los que sea necesaria la producción de un campo magnético, (motores, transformadores, fluorescentes, electroimanes, etc). En la mayoría de los casos se desprecia la parte resistiva de la bobina y se considera solo la parte inductiva (XL). Cuando una bobina se conecta a una fuente de corriente alterna se origina un desfase de 90 grados entre la tensión y la intensidad, adelantándose la tensión a la intensidad . La intensidad puede calcularse mediante la ley de Ohm, sustituyendo la resistencia por la reactancia inductiva: En corriente continua la bobina se comporta como un conductor de muy baja resistencia, ya que al no existir variación de campo magnético por tratarse de una tensión continua, no se produce fuerza contraelectromotriz que se oponga a la intensidad. Circuito con condensador puro. Cuando un condensador de conecta a una red de corriente alterna, ocurre similar a cuando se conecta una bobina, pero en este caso es la intensidad la que MÁQUINAS DE CORRIENTE ALTERNA - Página 4 se adelanta a la tensión un valor de 90 grados. De la misma forma puede calcularse la intensidad mediante la ley de Ohm, sustituyendo la resistencia por la reactancia capacitativa: ⁄ Potencia en sistemas alternos. El factor de potencia. En corriente alterna la potencia entregada depende de la naturaleza de la carga conectada al circuito y más concretamente del desfase que provoque la carga entre la tensión y la corriente que circula por el circuito. Si la carga es resistiva pura, la tensión y la corriente están en fase, en este caso la potencia es siempre de signo positivo (ya que tensión y corriente tienen el mismo signo en cada instante) y su valor es el producto de los valores eficaces de la tensión por la corriente. Si la tensión y la corriente no están en fase (debido a que la carga no es resistiva pura), habrá momentos en los que tengan distinto signo, por ello la potencia será negativa en algunos instantes. La potencia negativa es potencia que la carga entrega al generador, es decir, es potencia que circula por la línea pero que no se transforma en trabajo. Aparentemente, la potencia total -área encerrada por la gráfica de P- tendrá el mismo valor en ambos casos, pero ya que solo la potencia positiva es la que nuestra carga aprovecha, la potencia útil para nuestro circuito será solo el área encerrada por las partes positivas. Así pues el vector que representa la parte positiva sumado con el de la parte negativa me dará como resultado un vector que representará la potencia total que circula por la línea, denominada Potencia Aparente y representada por la letra S, sus unidades son VA (Voltiamperios) y responde en todo momento al producto de la tensión y la intensidad. S = V·I (VA) Mientras a la potencia aprovechada por la carga se la conoce como Potencia Activa, se representa por P y sus unidades son los W (watios). La potencia negativa, debida a la presencia de cargas capacitivas e inductivas en el circuito, recibe el nombre de Potencia Reactiva, se representa por Q y se mide en VAR (Voltiamperos reactivos) El ángulo que formarán los vectores que representan la potencia activa y la que circula por los conductores se designa con la letra φ, y coincide con el ángulo que forman la tensión y la corriente en un circuito. A partir del triángulo rectángulo que forman las potencias se puede establecer que: MÁQUINAS DE CORRIENTE ALTERNA - Página 5 P = S·Cos φ ó lo que es lo mismo, P = V·I·Cos φ Al Cos φ se le conoce como factor de potencia (factor que multiplica la potencia aparenta para obtener la activa). Éste, que siempre es menor o igual a la unidad, representa la relación entre la potencia entregada a la carga y la potencia consumida (y por tanto aprovechada) por la misma. Cuanto más pequeño sea el factor de potencia menor será la potencia aprovechada. Las compañías eléctricas sancionan económicamente a los consumidores con factores de potencia por debajo de 0,9, ya que ocasiona pérdidas al circular por la línea más potencia de la necesaria y tener que sobredimensionar los conductores. Circuito R-L-C En general un circuito tendrá una componente resistiva, otra capacitiva y otra inductiva, La impedancia total del circuito será la suma vectorial de los tres componentes. ⃗ ⃗⃗ ⃗⃗⃗⃗⃗ ⃗⃗⃗⃗⃗ La representación gráfica de esta suma sería el siguiente triángulo: Aplicando Pitágoras se pueden establecer las siguientes ecuaciones: Al multiplicar cada componente del circuito por la corriente que circula por el mismo, se obtiene el llamado triángulo de tensiones, que represente la suma de las caídas de tensión en los componentes (VR, VXL, VXC) y la tensión V aplicada al circuito. De este triángulo se desprende: Si ahora se multiplican otra vez por la intensidad cada uno de los lados del triángulo se obtiene el llamado triángulo de potencias. De este triángulo se desprende que: la expresión Por lo que la potencia en alterna vendrá dada por , tal y como se ha comentado anteriormente. Para mejorar el factor de potencia de una instalación habrá que disminuir el valor de Q, haciendo que ( , o al menos lo más aproximado posible a ese valor. Para conseguir eso normalmente se insertarán condensares en el circuito para modificar el valor de . MÁQUINAS DE CORRIENTE ALTERNA - Página 6 Frecuencia de resonancia. La resonancia eléctrica es un fenómeno que se produce en un circuito en el que existen elementos reactivos (bobinas y capacitores) cuando es recorrido por una corriente alterna de una frecuencia tal que hace que la reactancia se anule. Para ese valor de frecuencia se cumple que: , es decir √ Generación de la corriente alterna Las compañías eléctricas generadoras producen energía eléctrica; transforman algún tipo de energía (hidráulica, nuclear, térmica, etc) en movimiento rotatorio que aplicado a un alternador produce energía eléctrica alterna. Ese flujo generará en la bobina, según la ley de Faraday, una f.e.m igual a la variación del flujo en el tiempo, es decir: E = Vmax · sen(wt) De esto se deduce que la f.e.m generada en una bobina que gira en el interior de un campo magnético es proporcional al seno, o sea, es una señal alterna senoidal. El alternador es una máquina de iguales características que un generador de corriente continua, pero que en lugar de delgas tiene anillos, por lo que no se produce cambio de sentido de la corriente y se obtienen semiperiodos negativos. En la imagen se observa la corriente inducida sobre un conductor que gira con velocidad angular w en el interior de un campo magnético. En las zonas de cercanas a 0 y a Π, las cantidad de líneas de flujo magnético cortadas por el conductor en su desplazamiento es prácticamente nula, de ahí que la f.e.m generada sobre el sea también nula. Al acercarse el conductor a las zonas Π/2 y 3Π/2, la cantidad de líneas cortadas es máximo, generando por lo tanto la máxima f.e.m. La frecuencia obtenida por el generador será por lo tanto función de la velocidad de giro del rotor, por lo que esta velocidad interesa que sea lo mas constante posible. El recorrido del conductor será también el recorrido del extremo del faso o vector que representa en todo momento el valor de la corriente alterna. MÁQUINAS DE CORRIENTE ALTERNA - Página 7 Corriente alterna trifásica. La potencia de la corriente alterna fluctúa. Para uso doméstico, por ejemplo en bombillas, esto no supone un problema, dado que el cable de la bombilla permanecerá caliente durante el breve intervalo de tiempo que dure la caída de potencia. De hecho, los tubos de neón, fluorescentes y las pantallas de tubo parpadearán, aunque más rápidamente de lo que el ojo humano es capaz de percibir. Sin embargo, para el funcionamiento de motores, es útil disponer de una corriente que aporte una potencia constante. De hecho, es posible obtener una potencia constante de un sistema de corriente alterna teniendo tres líneas de tensión con corriente alterna funcionando en paralelo, y donde la corriente de fase está desplazada 1/3 de ciclo, es decir, desfasadas 120º entre ellas. A cada una de estas fases se la conoce como R, S y T (L1, L2 y L3). En la práctica se utiliza sólo corriente alterna trifásica para aplicaciones industriales o de gran potencia y monofásica para aplicaciones domésticas o de pequeña potencia. Las ventajas que reporta la utilización de corriente trifásica frente a la monofásica sonlas siguientes; con un solo alternador creamos tres tensiones, en vez de una. Para transportar tres tensiones monofásicas necesitamos 6 conductores, frente a los 3 de la corriente trifásica. Se ahorra en conductor y se reducen las perdidas de transporte. La posibilidad de disponer de dos tensiones, una más elevada o de línea y otra más reducida o de fase. Sencillez de fabricación de algunas máquinas, como los motores trifásicos, así como mayor rendimiento de estas máquinas frente a las monofásicas. En cualquier instante la suma aritmética de los 3 valores es cero, no así la suma vectorial. Si realizamos la suma vectorial en diferentes instantes obtenemos Un vector de magnitud constante y gira a una velocidad constante de una vuelta por periodo. Por lo tanto si aplicamos estas corrientes a tres bobinas desfasadas 120º obtendremos un campo magnético giratorio. Velocidad de giro del campo magnético La velocidad de giro del campo magnético vendrá dada por la expresión: Donde f es la frecuencia de la corriente en Hz, p son los pares de polos del motor y n la velocidad de giro en rpm. Así pues la velocidad de giro del campo magnético depende de la frecuencia de la corriente, 50 Hz en Europa y del número de polos de la máquina. Esta velocidad será la de giro del motor, por lo que ésta será una velocidad fija en este tipo de motores. Para cambiarla hay que variar la frecuencia de la corriente, lo que se logra con equipos electrónicos, normalmente caros, por lo que para aplicaciones que requieran mucha variación de velocidad se usan motores de corriente contínua. MÁQUINAS DE CORRIENTE ALTERNA - Página 8 MOTORES DE CORRIENTE ALTERNA Motor Universal. El motor universal es un tipo de motor que puede ser alimentado con corriente alterna o con corriente continua, es indistinto. Sus características principales no varían significativamente, sean alimentados de una forma u otra. Por regla general, se utilizan con corriente alterna. Este tipo de motor se puede encontrar tanto para una máquina de afeitar como para una lavadora, esto da una idea del margen de potencia y velocidad en que pueden llegar a ser construidos. En general son los usados en electrodomésticos y maquinas herramienta y presentan un buen par de arranque, ya que los bobinados del estator y del rotor están conectados en serie a través de unas escobillas. El principio de funcionamiento es el mismo que el del motor de corriente continua. Motores Asíncronos o motor de inducción. El motor asíncrono fue creado es su forma más simple por Nikola Tesla en 1885. Dos años más tarde se construyó una máquina con el rotor en forma de jaula de ardilla, el de rotor bobinado se desarrolló a principio del siglo XX. La diferencia del motor asíncrono con el resto de los motores eléctricos radica en el hecho de que no existe corriente conducida a uno de sus devanados (normalmente al rotor). La corriente que circula por el devanado del rotor se debe a la fuerza electromotriz inducida en él por el campo giratorio; por esta razón, a este tipo de motores se les designa también como motores de inducción. La denominación de motores asíncronos obedece a que la velocidad de giro del motor no es la de sincronismo, impuesta por la frecuencia de la red. Hoy en día se puede decir que más del 80% de los motores eléctricos utilizados en la industria son de este tipo, trabajando en general a velocidad prácticamente constante. No obstante, y gracias al desarrollo de la electrónica de potencia (inversores y cicloconvertidores), en los últimos años está aumentando considerablemente la utilización de este tipo de motores a velocidad variable. La gran utilización de los motores asíncronos se debe a las siguientes causas: construcción simple, bajo peso, mínimo volumen, bajo coste y mantenimiento inferior al de cualquier otro tipo de motor eléctrico. Hay dos tipos básicos de motores asíncronos: - Motores de jaula de ardilla: el devanado del rotor está formado por barras de cobre o aluminio, cuyos extremos están puestos en cortocircuito por dos anillos a los cuales se unen por medio de soldadura o fundición. - Motor de rotor bobinado: el devanado del rotor de estos motores está formado por un bobinado trifásico similar al del estátor, con igual número de polos. Un motor de rotor bobinado a igualdad de potencia y clase de protección, es más costoso, menos robusto y exige un mantenimiento mayor que uno de jaula de ardilla. No obstante, frente a este último posee fundamentalmente dos ventajas, que en algunos casos concretos resultan determinantes: las características del circuito eléctrico del rotor pueden ser modificadas en cada instante desde el exterior, y la tensión e intensidad del rotor son directamente accesibles a la medida o al control electrónico. MÁQUINAS DE CORRIENTE ALTERNA - Página 9 Principio de funcionamiento. Cuando se alimenta el estátor de un motor asíncrono con un sistema trifásico de tensiones de frecuencia f1, se origina en el entrehierro un campo magnético giratorio de amplitud constante cuya velocidad es, como se ha visto antes n=60f/P. Esta velocidad recibe el nombre de velocidad de sincronismo y se representa por ns. En los conductores del rotor, el campo giratorio inducirá unas fuerzas electromagnéticas, que al estar el devanado en cortocircuito darán lugar a unas corrientes. Éstas en presencia de un campo magnético, determinan que sobre los conductores actúen unas fuerzas, las cuales producen un par, que de acuerdo a la ley de Lenz, hace que el rotor tienda a seguir el campo del estátor. La velocidad de giro del rotor (n) no podrá igualar a la de sincronismo ns, ya que entonces no se produciría la variación de flujo en el devanado del rotor y no se induciría ninguna fuerza electromagnética. Se denomina deslizamiento (s), a la velocidad relativa del campo giratorio respecto del rotor, expresado en tanto por uno de la velocidad del campo, es decir: si se expresa en términos absolutos sería s = ns – n (rpm). El valor del deslizamiento aumenta con la carga, pero eso hace que aumente el par ya que al aumentar el deslizamiento se induce mayor corriente en el rotor y esto provoca un mayor par. En general el par será proporcional al deslizamiento ya que a mayor deslizamiento, la velocidad de giro relativa del estator con respecto al rotor producirá mayores corrientes inducidas y mayor par. Esto es así hasta el par máximo del motor, una vez superado el motor pierde fuerza y se puede llegar a parar. Por otro lado cuando la velocidad de giro es próxima a la de sincronismo, el par es prácticamente nulo. El efecto conseguido es el mismo que si el rotor estuviera quieto y el campo magnético girara a la velocidad s (ns-n), por lo que la relación entre esta velocidad y la frecuencia de de la corriente inducida en el rotor (fr) responderá a la ecuación: de la velocidad de sincronismo .Operando entre esta ecuación y la , se llega a la conclusión de que , o lo que es lo mismo: fr = f·s donde fr es la frecuencia de las corrientes del rotor y f la de la red eléctrica o de las corrientes del estator. Motores Síncronos. La característica principal de este tipo de motores es que trabajan a velocidad constante que depende solo de la frecuencia de la red y de otros aspectos constructivos de la máquina. A diferencia de los motores asincrónicos, la puesta en marcha requiere de maniobras especiales a no ser que se cuente con un sistema automático de arranque. Si un motor síncrono, por exceso de carga pierde la velocidad de sincronismo, se para. La máquina síncrona es una máquina reversible ya que se puede utilizar como generador de corriente alterna o como motor síncrono. Está constituido por dos devanados independientes. Un devanado inductor, alimentado por corriente continua, que da lugar a los polos de la máquina y que se coloca en el rotor. Un devanado inducido distribuido formando un arrollamiento trifásico recorrido por corriente alterna. Principio de funcionamiento Si a un alternador trifásico se le retira la máquina motriz y se alimenta su estator mediante un sistema trifásico de corriente alterna se genera en el estator un campo magnético giratorio a la velocidad ns. Si en estas circunstancias, con el rotor parado, se alimenta el devanado del mismo con corriente continua se produce un campo magnético rotórico fijo, delante del cual pasa el campo MÁQUINAS DE CORRIENTE ALTERNA - Página 10 magnético del estator. Los polos del rotor están sometidos ahora a atracciones y repulsiones en breves periodos de tiempo, por parte de los polos del estator pero el rotor no consigue girar, a lo sumo vibrará. Este tipo de motor no arranca por sí solo. Los métodos de arranque son sol siguientes: 1.- Arranque por medio de la reducción de la frecuencia eléctrica. Se disminuye mucho la frecuencia de la corriente del estator, en esas circunstancias el rotor es capar de empezar a girar lentamente. A partir de este punto se puede incrementar la frecuencia hasta el valor nominal. 2.- Arranque con un motor externo. Al llevar el rotor a la velocidad de sincronismo, haciéndolo girar mediante un motor auxiliar, al enfrentarse polos de signo opuestos se establece un enganche magnético que les obliga a seguir girando juntos, pudiendo ahora retirar el motor auxiliar. Este enganche magnético se produce ya que el campo giratorio estatórico arrastra por atracción magnética al rotor en el mismo sentido y velocidad. El motor auxiliar puede ser mucho mas pequeño ya que sólo debe hacer girar al motor en vacio. 3.- Arranque con devanados de amortiguamiento o arranque automático. Es el método mas usado, consiste en disponer durante la construcción de motor, de unas barras situadas en los polos del rotor, que harán la función de jaula de ardilla durante el arranque. Cuando el motor esta girando a la velocidad asíncrona en vacio, se aplica corriente continua a las bobinas del rotor y se establece la velocidad de sincronismo. El motor como condensador síncrono Una de las aplicaciones mas curiosas de estos motores es que si se les sobreexcita, consumen energía reactiva. Por este motivo solían usarse en vacío y sobreexcitados. Conexión de un motor trifásico Las posibles conexiónes de las tres bobinas que presentan un motor trifásico en su placa de bornas(que veremos mas adelante) son en estrella o en triángulo, denominados así por la forma que adoptan las bobinas de cada fase al conectarlas. Según se observa, el valor de la intensidad de fase y de la de línea es igual en la conexión en estrella, pero no en triángulo. Con las tensiones ocurre exactamente al revés, la tensión de línea es igual a la de fase en la conexión triángulo, pero no en la estrella. Conexión Triángulo (∆) La tensión de fase es igual a la de línea VF=VL En cuanto a la intensidad tenemos que en cada nudo, la suma de intensidades entrantes ha de ser igual a la suma de intensidades salientes (se sobreentiende que se trata de una suma vectorial). MÁQUINAS DE CORRIENTE ALTERNA - Página 11 En el nudo de la fase R tenemos que: ⃗⃗⃗⃗ ⃗⃗⃗⃗⃗⃗ ⃗⃗⃗⃗⃗⃗ o lo que es lo mismo ⃗⃗⃗⃗ ⃗⃗⃗⃗⃗⃗ ⃗⃗⃗⃗⃗⃗ Del diagrama vectorial se desprende que: √ , siendo tenemos , esto ocurre en todos los nudos, por lo √ que se puede decir que √ Es decir la intensidad de fase se ve reducida en raíz de tres con respecto a la de línea. Por lo tanto en una conexión en triángulo tenemos que: √ Conexión Estrella (λ) La intensidad de fase es igual a la de línea IF=IL En cuanto a las tensiones tenemos que en una de las ramas: ⃗⃗⃗⃗⃗⃗⃗ ⃗⃗⃗⃗⃗⃗⃗⃗ ⃗⃗⃗⃗⃗⃗⃗ Del diagrama vectorial se desprende que: √ , siendo tenemos , esto ocurre en todas las ramas, por lo que se √ puede decir que √ Es decir la tensión de fase se ve reducida en raíz de tres con respecto a la de línea. Por lo tanto en una conexión en estrella tenemos que: √ Potencia en un motor trifásico La potencia de un motor trifásico será tres veces la potencia de una de las fases, por lo que: P = 3·VF·IF.Cosφ Las mediciones de consumo de corriente y de entrega de tensión se efectúan sobre valores de línea, por lo que, en una conexión triángulo: ( ⁄ ) √ o lo que es lo mismo √ En una conexión estrella tenemos que ( ⁄ ) √ o lo que es lo mismo √ MÁQUINAS DE CORRIENTE ALTERNA - Página 12 Placa de bornes de un motor trifásico. Arranque estrella triángulo En la conexión estrella se puentean las conexiones W2, U2 y V2, en ese caso tenemos que: √ La conexión estrella se usa durante el arranque del motor, ya que se reduce la tensión de fase y por tanto se limita la intensidad de arranque, recordemos que: Ia=VF/RF (ya que E’=0). Una vez alcanzado el 80% o más de la velocidad nominal se cambiará la conexión a triángulo. La conexión en estrella se realizará también para conectar un motor 3~230 V a una red de 380V, ya que la red trifásica de 230 V está en desuso. En la conexión triángulo se unen las bornas U1 con W2, V1 con U2 y W1 con V2, en este caso tenemos que: √ La conexión triángulo proporciona mas par y más velocidad pero también mas consumo. Ya que IF=(VF-E’)/RF, si VF , IF . Si se requiere un gran par de arranque se puede arrancar directamente en triángulo, pero hay que tener en cuenta que la intensidad de arranque será muy elevada, 1,73 veces la de estrella (que para intensidades elevadas es importante - no es lo mismo 100A que 173A). El arranque estrella-triángulo se realiza mediante contactores, tal y como se muestra en la figura. Primero se conecta KM3 (λ) e inmediatamente después KM1, el motor arranca en estrella. Transcurridos unos segundos se desconecta KM3 y se conecta KM4 (∆), el motor ahora funciona en conexión triángulo. El cambio de conexiones se realiza automáticamente mediante el uso de un temporizador.