Dominio de la Frecuencia
Anuncio

Dominio de la Frecuencia
Sistemas Electrónicos de Control
Álvaro Gutiérrez
17 de Marzo de 2015
aguti@etsit.upm.es
www.robolabo.etsit.upm.es
N
Índice
1 Introducción
2 Representaciones Gráficas
Diagrama de Bode
Diagrama de Nyquist
3 Estabilidad
Criterio de estabilidad de Nyquist
Margen de Fase y Margen de Ganancia
Ancho de banda
Resonancia
4 Sintonización de PID
Método 1 de Ziegler-Nichols
Método 2 de Ziegler-Nichols
Interpretación en el dominio de la frecuencia
Ziegler-Nichols Modificado
5 TeleLaboratorio-Discretización
N
1 Introducción
2 Representaciones Gráficas
Diagrama de Bode
Diagrama de Nyquist
3 Estabilidad
Criterio de estabilidad de Nyquist
Margen de Fase y Margen de Ganancia
Ancho de banda
Resonancia
4 Sintonización de PID
Método 1 de Ziegler-Nichols
Método 2 de Ziegler-Nichols
Interpretación en el dominio de la frecuencia
Ziegler-Nichols Modificado
5 TeleLaboratorio-Discretización
N
Introducción
N
I
El análisis en el dominio de la frecuencia hace referencia
a la respuesta en régimen permanente a una entrada
sinusoidal
I
Los datos se pueden obtener sobre el sistema físico sin
disponer del modelo matemático
I
Las represntaciones más usadas son las de Bode,
Nyquist y Nichols
Régimen Permanente
I
Sea
x(t) = Xsen(ωt)
I
donde
G(s) =
I
Y(s)
es estable
X(s)
entonces
yss (t) = Ysen(ωt + φ)
I
donde
Y = X |G(jω)| y φ = G(jω)
I
por lo tanto
Y(jω) y G(jω) =
|G(jω)| = X(jω) N
Y(jω)
X(jω)
1 Introducción
2 Representaciones Gráficas
Diagrama de Bode
Diagrama de Nyquist
3 Estabilidad
Criterio de estabilidad de Nyquist
Margen de Fase y Margen de Ganancia
Ancho de banda
Resonancia
4 Sintonización de PID
Método 1 de Ziegler-Nichols
Método 2 de Ziegler-Nichols
Interpretación en el dominio de la frecuencia
Ziegler-Nichols Modificado
5 TeleLaboratorio-Discretización
N
1 Introducción
2 Representaciones Gráficas
Diagrama de Bode
Diagrama de Nyquist
3 Estabilidad
Criterio de estabilidad de Nyquist
Margen de Fase y Margen de Ganancia
Ancho de banda
Resonancia
4 Sintonización de PID
Método 1 de Ziegler-Nichols
Método 2 de Ziegler-Nichols
Interpretación en el dominio de la frecuencia
Ziegler-Nichols Modificado
5 TeleLaboratorio-Discretización
N
Diagrama de Bode - Introducción
I
Formado por 2 gráficas:
I
I
I
I
Para la ganancia K
I
I
N
Logaritmo de la magnitud de la función de transferencia:
20log |G(jω)|
Ángulo de fase
Ambas con el eje de la frecuencia logarítmico
Magnitud: 20log(K)
Fase: 0◦
Diagrama de Bode - Integradores
I
Para factores integrales ((jω)−1 )
I
I
N
Magnitud: −20log(ω) (-20 dB/dec)
Fase: −90◦
Diagrama de Bode - Integradores
I
Para factores integrales ((jω)−1 )
I
I
N
Magnitud: −20log(ω) (-20 dB/dec)
Fase: −90◦
Diagrama de Bode - Derivadores
I
Para factores derivativos ((jω))
I
I
N
Magnitud: 20log(ω) (20 dB/dec)
Fase: 90◦
Diagrama de Bode - Derivadores
I
Para factores derivativos ((jω))
I
I
N
Magnitud: 20log(ω) (20 dB/dec)
Fase: 90◦
Diagrama de Bode - Sist. de 1er order
I
Para factores de primer orden ((1 + jωT)−1 )
I
ωT << 1
I
I
I
ωT >> 1
I
I
I
N
Magnitud: 0
Fase: 0◦ en ω = 0
Magnitud: −20log(ω) (-20 dB/dec)
Fase: −45◦ en frecuencia esquina (ω = 1/T )
Fase: −90◦ en ω → ∞
Diagrama de Bode - Sist. de 1er order
I
Para factores de primer orden ((1 + jωT)−1 )
I
ωT << 1
I
I
I
ωT >> 1
I
I
I
N
Magnitud: 0
Fase: 0◦ en ω = 0
Magnitud: −20log(ω) (-20 dB/dec)
Fase: −45◦ en frecuencia esquina (ω = 1/T )
Fase: −90◦ en ω → ∞
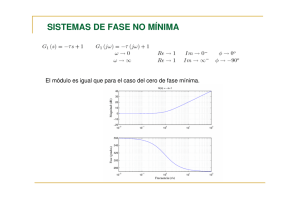
Diagrama de Bode - Sist. de 2o orden
I
Para factores cuadráticos ((1 + 2ξ(jω/ωn ) + (jω/ωn )2 )−1 )
I
ω << ωn
I
I
I
ω >> ωn
I
I
I
I
Magnitud: −40log(ω/ωn ) (-40 dB/dec)
Fase: −90◦ en frecuencia esquina (ω = ωn )
Fase: −180◦ en ω → ∞
Frecuencia de resonancia:
I
I
N
Magnitud: 0
Fase: 0◦ en ω = 0
p
1 − 2ξ 2 ; 0 ≤ ξ ≤ 0.707
1
Mr = |G(jωr )| = p
; 0 ≤ ξ ≤ 0.707
2ξ 1 − ξ 2
ωr = ωn
Diagrama de Bode - Sist. de 2o orden
N
Diagrama de Bode - Ejemplo
I
Ejemplo:
I
N
G(s) =
10(s + 3)
s(s + 2)(s2 + s + 2)
Diagrama de Bode - Ejemplo
I
Ejemplo:
I
N
G(s) =
10(s + 3)
s(s + 2)(s2 + s + 2)
1 Introducción
2 Representaciones Gráficas
Diagrama de Bode
Diagrama de Nyquist
3 Estabilidad
Criterio de estabilidad de Nyquist
Margen de Fase y Margen de Ganancia
Ancho de banda
Resonancia
4 Sintonización de PID
Método 1 de Ziegler-Nichols
Método 2 de Ziegler-Nichols
Interpretación en el dominio de la frecuencia
Ziegler-Nichols Modificado
5 TeleLaboratorio-Discretización
N
Diagrama de Nyquist - Introducción
I
El diagrama de Nyquist es una representación en
coordenadas polares de la magnitud de G(jω) con
respecto al ángulo de fase de G(jω) cuando ω varía de 0 a
∞
I
Los ángulos de fase son positivos si se miden en el
sentido contrario a las agujas del reloj
I
Los ángulos de fase son negativos si se miden en el
sentido de las agujas del reloj
I
Cada punto del diagrama representa un valor de G(jω)
para una determinada ω
I
Ventaja: Representa en una gráfica las características de
la respuesta en frecuencia para todo el rango de ω
I
Desventaja: No indica claramente la contribución de todos
los factores de la FT en lazo abierto
N
Diagrama de Nyquist - Integral y Derivativo
I
Integral:
I
I
I
1
1
1
= −j =
−90◦
jω
ω
ω
Diagrama de Nyquist: Eje imaginario negativo
G(jω) =
Derivativo:
I
I
G(jω) = jω = ω 90◦
Diagrama de Nyquist: Eje imaginario positivo
N
Diagrama de Nyquist - 1er orden
I
G(jω) =
I
I
1
1
=√
−tan−1 ωT
1 + jωT
1 + ω2T 2
1
1
G(j0) = 1 0◦ y G(j ) = √ −45◦
T
2
G(jω) = 1 + jωT =
I
√
1 + ω 2 T 2 tan−1 ωT
√
1
G(j0) = 1 0◦ y G(j ) = 2 45◦
T
N
Diagrama de Nyquist - 1er orden
I
G(jω) =
I
I
1
1
=√
−tan−1 ωT
1 + jωT
1 + ω2T 2
1
1
G(j0) = 1 0◦ y G(j ) = √ −45◦
T
2
G(jω) = 1 + jωT =
I
√
1 + ω 2 T 2 tan−1 ωT
√
1
G(j0) = 1 0◦ y G(j ) = 2 45◦
T
N
Diagrama de Nyquist - 2o orden
I
G(jω) =
I
I
I
1
; ξ>0
ω
ω
1 + 2ξ(j ) + (j )2
ωn
ωn
limω→0 G(jω) = 1 0◦ y limω→∞ G(jω) = 0 −180◦
1
Si ω = ωn → G(jωn ) =
−90◦
2ξ
G(jω) = 1 + 2ξ(j
I
ω
ω
) + (j )2 ; ξ > 0
ωn
ωn
limω→0 G(jω) = 1 0◦ y limω→∞ G(jω) = ∞ 180◦
N
Diagrama de Nyquist - 2o orden
I
G(jω) =
I
I
I
1
; ξ>0
ω
ω
1 + 2ξ(j ) + (j )2
ωn
ωn
limω→0 G(jω) = 1 0◦ y limω→∞ G(jω) = 0 −180◦
1
Si ω = ωn → G(jωn ) =
−90◦
2ξ
G(jω) = 1 + 2ξ(j
I
ω
ω
) + (j )2 ; ξ > 0
ωn
ωn
limω→0 G(jω) = 1 0◦ y limω→∞ G(jω) = ∞ 180◦
N
Diagrama de Nyquist - Formas generales
I
Tipo 0:
I
I
I
Tipo 1:
I
I
I
G(j0) = finito y sobre ele eje real positivo. Fase(0)
perpendicular al eje real
G(j∞) = 0. Fase (∞) tangente a uno de los ejes
G(j0) = ∞. Fase(0) = −90◦
G(j∞) = 0. Fase (∞) tangente a uno de los ejes
Tipo 2:
I
I
G(j0) = ∞. Fase(0) = −180◦
G(j∞) = 0. Fase (∞) tangente a uno de los ejes
N
Conclusiones en lazo cerrado
I
I
|
G(jω1 )
OA
|=
1 + G(jω1 )
PA
G(jω1 ) − 1 + G(jω1 ) = φ − θ
N
1 Introducción
2 Representaciones Gráficas
Diagrama de Bode
Diagrama de Nyquist
3 Estabilidad
Criterio de estabilidad de Nyquist
Margen de Fase y Margen de Ganancia
Ancho de banda
Resonancia
4 Sintonización de PID
Método 1 de Ziegler-Nichols
Método 2 de Ziegler-Nichols
Interpretación en el dominio de la frecuencia
Ziegler-Nichols Modificado
5 TeleLaboratorio-Discretización
N
1 Introducción
2 Representaciones Gráficas
Diagrama de Bode
Diagrama de Nyquist
3 Estabilidad
Criterio de estabilidad de Nyquist
Margen de Fase y Margen de Ganancia
Ancho de banda
Resonancia
4 Sintonización de PID
Método 1 de Ziegler-Nichols
Método 2 de Ziegler-Nichols
Interpretación en el dominio de la frecuencia
Ziegler-Nichols Modificado
5 TeleLaboratorio-Discretización
N
Introducción
I
Determina la estabilidad de un sistema en lazo cerrado a
partir de la respuesta en frecuencia en lazo abierto
I
Se basa en el teorema de la transformación de la teoría
de variable compleja
El criterio de estabilidad se supone para un sistema que
pueda materializarse físicamente:
I
I
I
Causal, el orden del denominador es mayor que el del
numerador
lims→∞ 1 + G(s)H(s) = constante
N
Criterio de estabilidad de Nyquist
I
Si la FT en lazo abierto G(s)H(s) tiene P polos en el
semiplano derecho del plano s, y lims→∞ G(s)H(s) = cte.,
para que el sistema sea estable, el lugar geométrico
G(jω)H(jω) para ω ∈ [−∞, ∞] debe rodear P veces el
punto −1 + j0
I
Podemos resumirlo en:
I
I
I
I
Z =N+P
Z = número de ceros de 1 + G(s)H(s) en el semiplano
derecho del plano s
N = número de rodeos en el sentido de las agujas del reloj
del punto −1 + j0
P = número de polos de G(s)H(s) en el semiplano derecho
del plano s
N
Ejemplos I
I
G(s)H(s) =
K
(T1 s + 1)(T2 s + 1)
N
Ejemplos II
I
G(s)H(s) =
K
s(T1 s + 1)(T2 s + 1)
N
Ejemplos III
I
G(s)H(s) =
K(T2 s + 1)
s2 (T1 s + 1)
N
Ejemplos IV
I
G(s)H(s) =
K
s(T1 s − 1)
N
Ejemplos V
I
G(s)H(s) =
K(s + 3)
; K>1
s(s − 1)
N
Ejemplos VI
I
G(s)H(s) =
K(s + 0.5)
(s3 + s2 + 1)
N
1 Introducción
2 Representaciones Gráficas
Diagrama de Bode
Diagrama de Nyquist
3 Estabilidad
Criterio de estabilidad de Nyquist
Margen de Fase y Margen de Ganancia
Ancho de banda
Resonancia
4 Sintonización de PID
Método 1 de Ziegler-Nichols
Método 2 de Ziegler-Nichols
Interpretación en el dominio de la frecuencia
Ziegler-Nichols Modificado
5 TeleLaboratorio-Discretización
N
Margen de Fase y Margen de Ganancia I
I
Margen de Fase: Cantidad de retardo de fase adicional en
la frecuencia de cruce de ganancia requerida para llevar el
sistema al borde de la inestabilidad (MF = 180◦ + φ)
I
Margen de Ganancia: El inverso de la magnitud |G(jω)|
en la frecuencia (ω1 ) a la cual el ángulo de fase es −180◦
1
)
(MG =
|G(jω1 )|
N
Margen de Fase y Margen de Ganancia II
N
Margen de Fase y Margen de Ganancia III
I
G(s)H(s) =
K
; K = 10 y K = 100
s(s + 1)(s + 5)
N
Margen de Fase y Margen de Ganancia III
I
G(s)H(s) =
K
; K = 10 y K = 100
s(s + 1)(s + 5)
N
1 Introducción
2 Representaciones Gráficas
Diagrama de Bode
Diagrama de Nyquist
3 Estabilidad
Criterio de estabilidad de Nyquist
Margen de Fase y Margen de Ganancia
Ancho de banda
Resonancia
4 Sintonización de PID
Método 1 de Ziegler-Nichols
Método 2 de Ziegler-Nichols
Interpretación en el dominio de la frecuencia
Ziegler-Nichols Modificado
5 TeleLaboratorio-Discretización
N
Ancho de banda I
I
Frecuencia de corte: La frecuencia (ωb ) a la que la
magnitud de respuesta en frecuencia en lazo cerrado está
3 dB por debajo del valor de frecuencia cero
I
Ancho de banda: El rango de frecuencias donde
0 ≤ ω ≤ ωb
I
Recordemos que:
π−β
tr =
ωd
I
I
I
N
ξ ↑→ tr ↑
ξ ↑→ Bw ↓
tr ∝ 1/Bw
Ancho de banda II
I
I
1
s+1
1
GII (s) =
3s + 1
GI (s) =
N
Ancho de banda II
I
I
1
s+1
1
GII (s) =
3s + 1
GI (s) =
N
1 Introducción
2 Representaciones Gráficas
Diagrama de Bode
Diagrama de Nyquist
3 Estabilidad
Criterio de estabilidad de Nyquist
Margen de Fase y Margen de Ganancia
Ancho de banda
Resonancia
4 Sintonización de PID
Método 1 de Ziegler-Nichols
Método 2 de Ziegler-Nichols
Interpretación en el dominio de la frecuencia
Ziegler-Nichols Modificado
5 TeleLaboratorio-Discretización
N
Resonancia I
I
I
Frecuencia de resonancia: La frecuencia (ωr ) a la que la
magnitud de respuesta en frecuencia en lazo cerrado tiene
un máximo.
Magnitud de resonancia: La magnitud del pico de
resonancia.
I
I
p
1 − 2ξ 2 ; 0 ≤ ξ ≤ 0.707
1
; 0 ≤ ξ ≤ 0.707
Mr = |G(jωr )| = p
2ξ 1 − ξ 2
ωr = ωn
N
Conclusiones
I
MF, MG y Mr → amortiguamiento del sistema
I
ωMF , ωr y BW → velocidad de la respuesta transitoria
I
ωr ↑→ par de polos dominantes lazo cerrado con ξ ↓
I
ωr ↓→ par de polos dominantes lazo cerrado con ξ ↓
I
ξ ↓→ ωd ' ωr ∝ 1/tr
I
Mr ∝ Mp
I
tr ∝ 1/BW
I
Mp ∝ 1/ξ → MF ∝ ξ → MF ∝ 1/Mp
I
tr ∝ MG
N
1 Introducción
2 Representaciones Gráficas
Diagrama de Bode
Diagrama de Nyquist
3 Estabilidad
Criterio de estabilidad de Nyquist
Margen de Fase y Margen de Ganancia
Ancho de banda
Resonancia
4 Sintonización de PID
Método 1 de Ziegler-Nichols
Método 2 de Ziegler-Nichols
Interpretación en el dominio de la frecuencia
Ziegler-Nichols Modificado
5 TeleLaboratorio-Discretización
N
1 Introducción
2 Representaciones Gráficas
Diagrama de Bode
Diagrama de Nyquist
3 Estabilidad
Criterio de estabilidad de Nyquist
Margen de Fase y Margen de Ganancia
Ancho de banda
Resonancia
4 Sintonización de PID
Método 1 de Ziegler-Nichols
Método 2 de Ziegler-Nichols
Interpretación en el dominio de la frecuencia
Ziegler-Nichols Modificado
5 TeleLaboratorio-Discretización
N
Método 1 de Ziegler-Nichols
I
Basado en la respuesta al escalón
I
Válido para sistemas donde la planta no contiene ni
integradores (tipo 0) ni polos dominantes complejos
conjugados
P
PI
GPID (s) = 0.6T
(s + 1/L)2
s
PID
KP
τI
τD
T
L
T
0.9
L
T
1.2
L
∞
L
0.3
2L
0
N
0
0.5L
Método 1 de Ziegler-Nichols
I
I
1
(s + 1)3
Para un escalón unitario obtenemos que L = 0.81 y T = 3.7
Los parámetros del PID serían: K = 5.48, τI = 1.62 y
τD = 0.41
Sea G(s) =
Step Response
1.8
1.6
1.4
1.2
Amplitude
I
1
0.8
0.6
0.4
0.2
0
0
10
20
30
40
Time (sec)
50
60
N
70
80
1 Introducción
2 Representaciones Gráficas
Diagrama de Bode
Diagrama de Nyquist
3 Estabilidad
Criterio de estabilidad de Nyquist
Margen de Fase y Margen de Ganancia
Ancho de banda
Resonancia
4 Sintonización de PID
Método 1 de Ziegler-Nichols
Método 2 de Ziegler-Nichols
Interpretación en el dominio de la frecuencia
Ziegler-Nichols Modificado
5 TeleLaboratorio-Discretización
N
Método 2 de Ziegler-Nichols I
I
Basado en la respuesta en frecuencia
I
Válido para sistemas donde existen oscilaciones
mantenidas para un valor de Kcr
GPID (s) =
4 2
(s +
)
Pcr
0.075Kcr Pcr
s
KP
τI
τD
P
0.5Kcr
0
PI
0.45Kcr
PID
0.6Kcr
∞
1
Pcr
1.2
0.5Pcr
N
0
0.125Pcr
Método 2 de Ziegler-Nichols - Ejemplo
I
I
I
1
s(s + 1)(s + 2)
√
2π
= 4.44
Kcr = 6 y ωcr = 2 → Pcr =
ω
KP = 0.6Kcr = 3.6, τI = 0.5Pcr = 2.22 y τD = 0.125Pcr = 0.56
1
(s + 0.9)2
H(s) = 3.6(1 +
+ 0.56s) ' 2
2.22s
s
G(s) =
Step Response
1.6
1.4
1.2
Amplitude
I
1
0.8
0.6
0.4
0.2
0
0
2
4
6
8
10
12
Time (sec)
14
16
18
N
20
1 Introducción
2 Representaciones Gráficas
Diagrama de Bode
Diagrama de Nyquist
3 Estabilidad
Criterio de estabilidad de Nyquist
Margen de Fase y Margen de Ganancia
Ancho de banda
Resonancia
4 Sintonización de PID
Método 1 de Ziegler-Nichols
Método 2 de Ziegler-Nichols
Interpretación en el dominio de la frecuencia
Ziegler-Nichols Modificado
5 TeleLaboratorio-Discretización
N
Interpretación en el Diagrama de Nyquist I
I
Sabemos que
G(jω) = X(ω) + jY(ω)
I
Para ω0 , seleccionamos un punto (A) en el Diagrama de
Nyquist
A ≡ G(jω0 ) = X(ω0 ) + jY(ω0 )
N
Interpretación en el Diagrama de Nyquist I
I
Sabemos que
G(jω) = X(ω) + jY(ω)
I
Para ω0 , seleccionamos un punto (A) en el Diagrama de
Nyquist
A ≡ G(jω0 ) = X(ω0 ) + jY(ω0 )
I
I
Modificando la ganancia (Kp ) desplazamos un punto
radialmente con respecto al origen
Movimientos ortogonales se producen modificando Ti y/o
Td
N
Interpretación en el Diagrama de Nyquist II
N
Interpretación en el Diagrama de Nyquist II
N
Interpretación en el Diagrama de Nyquist II
N
Interpretación en el Diagrama de Nyquist II
N
Interpretación en el Diagrama de Nyquist III
I
Im[G(j ω )]
Re[G(j ω )]
P
P
D
N
Interpretación en el Diagrama de Nyquist III
N
Interpretación en el Diagrama de Nyquist III
N
Interpretación en el Diagrama de Nyquist III
N
Interpretación en el Diagrama de Nyquist IV
I
¿Qué ocurre con el
diagrama de Nyquist?
N
Interpretación en el Diagrama de Nyquist IV
Nyquist Diagram
−4
x 10
7
¿Qué ocurre con el
diagrama de Nyquist?
6
5
Imaginary Axis
I
4
3
2
1
1
G(s) =
(s + 1)(s + 2)(s + 3)
0
−1
−8
−6
−4
−2
0
Real Axis
N
2
4
6
−5
x 10
Interpretación en el Diagrama de Nyquist IV
Nyquist Diagram
−4
x 10
7
¿Qué ocurre con el
diagrama de Nyquist?
6
5
Imaginary Axis
I
4
3
2
1
1
G(s) =
(s + 1)(s + 2)(s + 3)
0
−1
−8
−6
−4
−2
0
Real Axis
N
2
4
6
−5
x 10
Interpretación en el Diagrama de Nyquist IV
Nyquist Diagram
−4
x 10
7
¿Qué ocurre con el
diagrama de Nyquist?
6
5
Imaginary Axis
I
4
3
2
1
1
G(s) =
(s + 1)(s + 2)(s + 3)
0
−1
−8
−6
−4
−2
0
Real Axis
N
2
4
6
−5
x 10
Interpretación en el Diagrama de Nyquist IV
Nyquist Diagram
−4
x 10
7
¿Qué ocurre con el
diagrama de Nyquist?
6
5
Imaginary Axis
I
4
3
2
1
1
G(s) =
(s + 1)(s + 2)(s + 3)
0
−1
−8
−6
−4
−2
0
Real Axis
N
2
4
6
−5
x 10
Interpretación en el Diagrama de Nyquist IV
Nyquist Diagram
−4
x 10
7
¿Qué ocurre con el
diagrama de Nyquist?
6
5
Imaginary Axis
I
4
3
2
1
1
G(s) =
(s + 1)(s + 2)(s + 3)
0
−1
−8
−6
−4
−2
0
Real Axis
N
2
4
6
−5
x 10
Interpretación en el Diagrama de Nyquist IV
Nyquist Diagram
−4
x 10
¿Qué ocurre con el
diagrama de Nyquist?
6
5
Imaginary Axis
I
7
4
3
2
1
G(s) =
(s + 1)(s + 2)(s + 3)
1
0
−1
−8
−6
−4
−2
0
Real Axis
N
2
4
6
−5
x 10
Interpretación en el Diagrama de Nyquist IV
Nyquist Diagram
−4
x 10
¿Qué ocurre con el
diagrama de Nyquist?
6
5
Imaginary Axis
I
7
4
3
2
1
G(s) =
(s + 1)(s + 2)(s + 3)
1
0
−1
−8
−6
−4
−2
0
Real Axis
N
2
4
6
−5
x 10
Interpretación del 2◦ método de ZN I
R(s)
E(s)
+
−
H(s)
U(s)
G(s)
Y(s)
G(s) =
N
1
(s + 1)(s + 2)(s + 3)
Interpretación del 2◦ método de ZN I
R(s)
E(s)
+
−
U(s)
H(s)
G(s)
Y(s)
G(s) =
Im[KpG(j ω )]
Re[KpG(j ω )]
−1
KP < 0.39
N
1
(s + 1)(s + 2)(s + 3)
Interpretación del 2◦ método de ZN I
R(s)
E(s)
+
−
U(s)
H(s)
G(s)
Y(s)
G(s) =
Im[KpG(j ω )]
Im[KpG(j ω )]
Re[KpG(j ω )]
−1
Re[KpG(j ω )]
−1
KP < 0.39
0.39 ≤ KP < 60
N
1
(s + 1)(s + 2)(s + 3)
Interpretación del 2◦ método de ZN I
R(s)
E(s)
+
−
U(s)
H(s)
G(s)
Y(s)
G(s) =
1
(s + 1)(s + 2)(s + 3)
Im[KpG(j ω )]
Im[KpG(j ω )]
Re[KpG(j ω )]
−1
Im[KpG(j ω )]
Re[KpG(j ω )]
Re[KpG(j ω )]
−1
−1
KP < 0.39
0.39 ≤ KP < 60
KP = 60
N
Interpretación del 2◦ método de ZN II
I
¿Qué ocurre para ωcr ?
I
En ωcr → (−1/Kcr , 0)
KP
τI
τD
P
0.5Kcr
0
PI
0.45Kcr
PID
0.6Kcr
∞
1
Pcr
1.2
0.5Pcr
N
0
0.125Pcr
Interpretación del 2◦ método de ZN
I
PI
G(jωcr ) = −1/Kcr → G(jωcr )Gc (jωcr ) = −0.45 + j0.08
I
PID
G(jωcr ) = −1/Kcr → G(jωcr )Gc (jωcr ) = −0.6 − j0.28
I
Nyquist
Diagram
System:
untitled1
Real: −0.443
Imag: 0.084
Frequency (rad/sec): 1.75
0.5
0
System: G
Real: −0.246
Imag: 0.000499
Frequency (rad/sec): 1.75
System: untitled2
Real: −0.595
Imag: −0.278
Frequency (rad/sec): 1.75
−0.5
−1
−1.5
Imaginary Axis
I
−2
−2.5
−3
−3.5
−4
−4.5
−5
−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
Real Axis
N
2
1 Introducción
2 Representaciones Gráficas
Diagrama de Bode
Diagrama de Nyquist
3 Estabilidad
Criterio de estabilidad de Nyquist
Margen de Fase y Margen de Ganancia
Ancho de banda
Resonancia
4 Sintonización de PID
Método 1 de Ziegler-Nichols
Método 2 de Ziegler-Nichols
Interpretación en el dominio de la frecuencia
Ziegler-Nichols Modificado
5 TeleLaboratorio-Discretización
N
Ziegler-Nichols Modificado (ZNM) I
1. Seleccionar un punto A del diagrama de Nyquist de la
planta
2. Seleccionar un punto B del conjunto ’controlador +
planta’ donde queremos mover A
3. Observar si puede ser desplazado mediante un P, PI, PD o
PID y seleccionar el más adecuado
4. Calcular los parámetros del controlador
N
Ziegler-Nichols Modificado (ZNM) II
I
I
I
I
Sea A = G(jωo ) = ra ej(π+φa )
Sea B = G(jωo )Gc (jωo ) = rb ej(π+φb )
Sea Gc (jωo ) = rc ej(φc )
Igualando términos tenemos:
I
I
I
I
rb ej(π+φb ) = ra rc ej(π+φa +φc )
rb
rc =
ra
φc = φb − φa
Para un PI:
I
Para un PD:
I
1
τI = −
ωo tgφc
I
τD =
I
KP = rc cosφc
I
KP = rc cosφc
I
tgφc
ωo
Para un PID (τD = ατI ):
I
I
I
1
= tgφc → {τD = ατI } →
ωo τI
2
2
τI αω0 − τI ω0 tgφc − 1 = 0
KP = rc cosφc
p
1
τI =
(tgφc + 4α + tg2 φc )
2ωo α
ωo τD −
N
Ziegler-Nichols Modificado (ZNM) III
I
¿Cómo seleccionar el punto deseado (B) ?
N
Ziegler-Nichols Modificado (ZNM) III
I
I
¿Cómo seleccionar el punto deseado (B) ?
ZN2 sugiere desplazar,para un PID, el punto (−1/Kcr , 0) a
(-0.6, -0.28) correspondiendo con: rb = 0.66 y φb = 25◦
N
Ziegler-Nichols Modificado (ZNM) III
I
I
I
¿Cómo seleccionar el punto deseado (B) ?
ZN2 sugiere desplazar,para un PID, el punto (−1/Kcr , 0) a
(-0.6, -0.28) correspondiendo con: rb = 0.66 y φb = 25◦
Pessen sugiere desplazarlo a (−0.2, −0.26) o
(−0.2, −0.21), correspondiendo con rb = 0.41 y φb = 61◦ o
rb = 0.29 y φb = 46◦ respectivamente
Step Response
1.6
1.4
G(s) =
1
s(s + 1)(s + 2)
Amplitude
1.2
1
0.8
0.6
0.4
ZN2
PE1
PE2
0.2
0
0
5
10
15
20
Time (sec)
25
30
N
35
40
Ejemplo I
I
Ejemplo:
G(s) =
I
1
(s + 1)(s + 12 )(s + 41 )
Especificaciones:
I
I
MF = 50◦
ess |escalón = 0
N
Ejemplo II
G(s) =
1
(s + 1)(s + 12 )(s + 41 )
Step Response
Step Response
1.8
1.6
φb=50°
rb=1/Mg ∼ 0.71
1.6
1.4
1.4
1.2
1.2
Amplitude
Amplitude
1
1
φ =10°
0.8
0.8
b
r =0.1
°
b
φb=20
0.6
rb=0.3
0.6
φ =30°
r =0.5
b
b
°
φb=40
0.4
rb=0.7
0.4
φ =50°
r =0.9
b
b
rb=1.1
°
φb=60
0.2
0.2
r =1.3
°
b
φb=70
0
0
5
10
15
Time (sec)
20
25
30
0
0
5
10
15
Time (sec)
20
N
25
30
Ejemplo III
I
Ejemplo:
G(s) =
I
1
(s + 1)3
Especificaciones:
I
I
I
5 % ≤ Mp ≤ 10 %
ts ≤ 5s (2 %)
ess |escalón = 0
N
1 Introducción
2 Representaciones Gráficas
Diagrama de Bode
Diagrama de Nyquist
3 Estabilidad
Criterio de estabilidad de Nyquist
Margen de Fase y Margen de Ganancia
Ancho de banda
Resonancia
4 Sintonización de PID
Método 1 de Ziegler-Nichols
Método 2 de Ziegler-Nichols
Interpretación en el dominio de la frecuencia
Ziegler-Nichols Modificado
5 TeleLaboratorio-Discretización
N
Telelaboratorio-Discreto
I
z = esT
I
T ≥ 30 ∗ BW
Recordemos que:
I
I
I
T z
τD z − 1
+
GPID,D (z) = KP 1 +
T z
τI z − 1
Por lo tanto:
I
I
KP
T
τI
KP τD
KD =
T
KI =
N
Conclusiones
I
I
I
El método de ZNM permite una sintonización de
parámetros en el dominio de la frecuencia
Es más flexible que los métodos 1 y 2 de ZN
Desventajas:
I
I
I
I
Se posiciona un único punto del diagrama
Las propiedades del sistema en lazo cerrado pueden
modificarse bruscamente
Es necesario estudiar la forma final del diagrama
Cuidado con la bibliografía:
N
Conclusiones
I
I
I
El método de ZNM permite una sintonización de
parámetros en el dominio de la frecuencia
Es más flexible que los métodos 1 y 2 de ZN
Desventajas:
I
I
I
I
Se posiciona un único punto del diagrama
Las propiedades del sistema en lazo cerrado pueden
modificarse bruscamente
Es necesario estudiar la forma final del diagrama
Cuidado con la bibliografía:
N
MATLAB
I
Diagrama de Bode: bode(num,den)
I
Ejes: w=logspace(-2,3,100) → bode(num,den,w)
I
Diagrama de Nyquist: nyquist(num,den)
I
Ejes: axis([Re1 Re2 Im1 Im2 ])
I
Margen de Fase y Ganancia: [Gm,pm,wcp,wcg]=
margin(num,den)
N
Gracias
GRACIAS
N
Gracias
GRACIAS
N