efectos del entrenamiento en juegos de realidad virtual sobre el
Anuncio

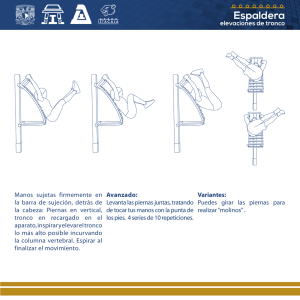
EFECTOS DEL ENTRENAMIENTO EN JUEGOS DE REALIDAD VIRTUAL SOBRE EL CONTROL DEL TRONCO EN UN NIÑO CON PARÁLISIS CEREBRAL AUTORES Garbor J. Barton, Malcolm B. Hawken, Richard J. Foster, Gill Holmes AND Perry B. Buthler; of the Research Institute for Sport and Exercise Sciences, Liverpool John Moores University in Liverpool. REVISTA Journal of NeuroEngineering and Rehabilitation, 2013, publicado en BioMedCentral. ANTECEDENTES No hay evidencia que apoye la hipótesis de que la pelvis y el tronco juegan un papel activo en la marcha, ya que desde el punto de vista tradicional se considera el área core del cuerpo como una "unidad de pasajeros" realizado por las extremidades inferiores, que se denomina la "unidad de locomotora". En estudios prospectivos, se encontró reducción de la fuerza y alteración de la propiocepción alrededor del core (pelvis y tronco), lo que se asocia con un mayor riesgo de lesiones, especialmente alrededor de la rodilla. Esto sugiere que un buen control del movimiento del core es un requisito previo para el buen control uso de los miembros inferiores. Un buen control de la interacción entre el tronco y la pelvis se requiere para llevar a cabo actividades de la vida diaria. A bajas velocidades la pelvis y el tronco se acoplan en el plano transversal y se mueven en fase, pero a medida que aumenta la velocidad de caminar hay una transición en la fase de acoplamiento anti-fase. La retracción del tronco, junto con la protracción de la pelvis en el lado de balanceo de la pierna, aumenta la longitud del paso y por lo tanto, mejora la eficiencia de la marcha. Uno de los problemas principales en la parálisis cerebral es la reducción del control selectivo del movimiento. La alteración control motor selectivo de la pelvis y el tronco dificulta la marcha eficiente y actividades de la vida diaria. MÉTODO El estudio se realizó en un niño con parálisis cerebral y diplejía espástica, quien tenía 10 años de edad, una altura de 1,34 m y un peso de 36 kg. Recibió un entrenamiento durante 6 semanas, 2 veces/semana durante 30 minutos (13 sesiones en total), en un ordenador de juego GPO, desarrollado en el Sistema CAREN (Computer Assisted Rehabilitation Environment, el sistema consiste en una base de movimiento, la captura del movimiento, una pantalla de proyección y un software; actualmente hay tres modelos disponibles los cuales se emplean para necesidades específicas). El ordenador de juego GPO consiste en un programa para el entrenamiento del movimiento del área core (tronco y la pelvis) que puede ser mejorada en la parálisis cerebral, basado en las asistencias que se transfieren a las actividades de la vida diaria. Tiene tres posturas de juego que introducen gradualmente más y más articulaciones de los miembros inferiores piernas para ser controladas. Empleando cámaras Vicon se rastran las rotaciones del tronco y la pelvis, la velocidad de avance del juego se ajusta mediante un algoritmo adaptativo que conduce a una velocidad máxima establecido para las diferentes condiciones. El niño no tenía antecedentes de la intervención quirúrgica, y no recibió fisioterapia convencional o rehabilitación específica del área core. Su Función Motora Gruesa Sistema de Clasificación (GMFCS [27]) tuvo una puntuación de 1, lo que indica que camina en el interior y al aire libre sin limitaciones y puede correr y saltar, pero la velocidad, el equilibrio y la coordinación pueden estar reducidas. Él asiste a la escuela general y no tiene dificultades de aprendizaje. Al examen físico presentaba una contractura en equino de 10° del tobillo derecho y un espasmo de isquiotibiales bilateral con un ángulo poplíteo de 60° también bilateral. Las caderas se compensaron en rotación interna bilateralmente junto con torsión tibial externa. La fuerza muscular se encontraba reducida en los dorsiflexores plantares derechos, extensores de la cadera derecha y de forma bilateral en los abductores de la cadera y en los eversores del pie. Presentaba signos positivos de espasticidad de forma bilateral en los flexores plantares (Tardieu 5 a la derecha y 2 en el lado izquierdo), los isquiotibiales (Tardieu 2) y cuádriceps (signo de Duncan-Ely positivo). La tarea del niño en el juego era utilizar el cuerno en la cabeza de un dragón a punto de reventar unos globos con letras. Después de que el globo objetivo fuera golpeado o perdido, el próximo objetivo aparecería a cierta distancia en frente del dragón en uno de los cuatro lugares imprevisibles (Figura 1). La velocidad de avance del dragón a través de la cueva virtual era controlada por el software del juego, el niño controlaba el movimiento a izquierda y hacia la derecha (velocidad) del dragón mediante la rotación de la pelvis alrededor de un eje vertical en una posición alta arrodillado. Esta posición se utiliza para simplificar requisitos de control mediante la eliminación de la complejidad del movimiento del tobillo. La arrodillada alta asegura que la pelvis y el tronco permanezcan en la misma posición relativa como de si estuviera de pie, dando así una oportunidad de entrenamiento más realista. El movimiento del dragón y la ubicación de los objetivos se limitaban a un solo plano horizontal. Las rotaciones de la pelvis y tronco sobre un eje vertical fueron capturadas mediante el seguimiento de la orientación 3D de dos grupos triangulares de tres marcadores retrorreflectantes colocados sobre la columna torácica y el sacro. Al principio de la primera sesión de entrenamiento, el esquema se le explicó el control del juego y el nivel de entrenamiento del juego, que correspondía a las rotaciones de la pelvis, el dragón no se movía hacia delante. Para cuantificar el acoplamiento entre el tronco y la pelvis, trazo ángulo-ángulo del tronco y la rotación de la pelvis, normalizada con sus respectivos rangos de movimiento durante todas las sesiones, se generaron para las secciones de juego entre objetivos consecutivos. La zona del casco convexo que contiene todos los puntos de datos del desplazamiento de ángulo-ángulo se calculó utilizando la función CONVHULL en MATLAB (The Mathworks, Natick MA, EE.UU.). Esta área se utiliza para cuantificar el nivel de acoplamiento entre el tronco y la pelvis (Figura 2). Los valores bajos de Área indican firmemente en fase o anti-fase de acoplamiento y los valores altos indican una falta de asociación entre la rotación del tronco y de la pelvis. RESULTADOS El trazo ángulo-ángulo de la primera sesión mostró un bajo nivel de acoplamiento en fase entre la pelvis y el tronco, indicada por mayores áreas de la envolvente convexa. Al final de la sexta semana (Sesión 13) del trazo ángulo-ángulo mostró más ajustado el acoplamiento en fase con reducción de áreas de la envolvente convexa que indican una mayor sincronización de la rotación del tronco y la pelvis (Figura 3). Los valores de área no se distribuyeron normalmente, pero un logaritmo natural transformado corrige la distribución (logÁrea). La media, máxima, mínima y la desviación estándar del logÁrea se calcularon sobre todos los objetivos (ensayos) para cada período de las sesiones. La regresión de la media logÁrea contra sesión mostró que media logÁrea se redujo significativamente durante las sesiones de entrenamiento (F1, 11=7,482, p=0,019), Figura 4. El logÁrea máxima no cambia con las sesiones de entrenamiento, pero la media y mínima logÁrea reduce significativamente a medida que progresaba el entrenamiento. La diferencia en las declinaciones visto con los valores máximos y mínimos fue de nuevo presente (Figura 4: regresiones: Mean + 2 × STD F1, 11 = 0.539, p = 0,478, Mean-2×STD F1, 11=15,526, p=0,002). Debido a su distribución espacial, llegó a la mitad del globo objetivo requiriendo menor rotación de la pelvis (objetivos cercanos) para llegar a la otra mitad (objetivos lejanos), Figura 1. La separación de los medios de logÁrea para objetivos cerca y lejos para todas las sesiones, una prueba t pareada mostró que tronco y pelvis en fase de acoplamiento es más fuerte para los objetivos lejanos que para la zona de objetivos (Figura 5), t12=3.259, p = 0,007. Los resultados mostraron que el control central mejoró después del período de seis semanas de entrenamiento. El tronco fue mejor controlado con los movimientos de la pelvis, las rotaciones laterales se controlan mejor que las rotaciones ángulo-ángulo de los segmentos corporales, y las rotaciones en un solo plano fuero más eficientes que las rotaciones en el plano transversal. DISCUSIÓN Durante el período de seis semanas, durante el entrenamiento teniendo como objetivo el movimiento de la pelvis en un paciente con parálisis cerebral, se encontró un desarrollo gradual en el aumento del acoplamiento entre la pelvis y el tronco. Hallazgos previos indican mejor control del movimiento del tronco en comparación con la pelvis en los niños con parálisis cerebral durante el entrenamiento de un juego de computadora basado en el acoplamiento ajustado entre la pelvis y el tronco, parece ser un mecanismo compensatorio lo que permite al niño mejorar el control de la pelvis indirectamente mediante el bloqueo mejor controlado del tronco. Co-contracción, que es la activación simultánea de músculos agonistas y antagonistas, es un motor común que se emplea como estrategia de control utilizada para mejorar la estabilidad y la precisión cuando se realiza una tarea por alguien inexperto. Los niveles de co-contracción disminuyen con el tiempo y la práctica. La reproducción del juego de entrenamiento 2 veces/semana durante 30 minutos más de 6 semanas parece haber dado lugar a la interconexión del tronco y la pelvis, lo que representa la respuesta inicial a la nueva tarea del juego. La intensificación de la exposición al juego por medio del aumento de la frecuencia o la duración de juego, o ambos, puede conducir a la reducción del acoplamiento entre el tronco y la pelvis como el control selectivo de mejoría. Desarrollo de estrategias de compensación para la alteración de movimiento se pueden evitar por la restricción inducida en la terapia de movimiento que inhiben físicamente la compensación forzando de ese modo el uso del movimiento dirigido; tal restricción impide el uso de la rotación del tronco mientras conduce el juego de GPO con la rotación de la pelvis y puede ser proporcionada por el software del juego como un medio para facilitar el uso de la pelvis independiente del tronco. Un mayor nivel de acoplamiento se encontró al utilizar una amplia gama de rotación de la pelvis necesario para alcanzar los objetivos lejanos de la línea media. El niño era capaz de mover la pelvis con menos acoplamiento en fase cuando se requerían pequeños rangos (indicado por mayor logÁrea), pero el movimiento pélvico se vio favorecido por la rotación del tronco en la misma fase para alcanzar los objetivos más lejanos de la línea media (confirmado por menor logÁrea). Los padres del niño evidenciaron una mejor postura en el sedente y el entrenador de natación informó de igual manera una mejoría en el gesto durante la natación. CONCLUSIONES Las mejorías cuantificables indican un buen potencial para la técnica empleada en este estudio con el objetivo de mejorar el control central, que es un requisito previo para un buen control de movimiento de las piernas y los brazos. Se espera que la exposición al juego para reducir el acoplamiento debido a la reducción de co- contracción de los músculos que unen el tronco y la pelvis mejore con el control selectivo logrado con este tipo de entrenamiento, así mismo se espera reducir el tiempo necesario para lograr los movimientos selectivos. La rotación pélvica se favorece por la rotación del tronco en los extremos del rango de rotación de la misma pelvis debido a las restricciones mecánicas, el entrenamiento selectivo del control de la pelvis probablemente sea más productivo entre más cerca al centro de orientación. Elaborado por: YURITZAN ALEJANDRA DEVIA LEÓN RESIDENTE III AÑO MEDICINA DE LA ACTIVIDAD FÍSICA Y EL DEPORTE FUCS – HUISJ – HUSJ