(DFIG).
Anuncio
.")
Análisis de los efectos ante perturbaciones eléctricas y
mecánicas en el generador de inducción de doble
alimentación (DFIG).
TITULACIÓN: Grado Ingeniería Eléctrica
AUTOR: José Manuel Torres Olmedo
DIRECTOR: José Antonio Barrado Rodrigo
FECHA: 09/2013
Análisis de los efectos ante perturbaciones eléctricas y
mecánicas en el generador de inducción de doble
alimentación (DFIG).
1. ÍNDICE GENERAL
TITULACIÓN: Grado Ingeniería Eléctrica
AUTOR: José Manuel Torres Olmedo
DIRECTOR: José Antonio Barrado Rodrigo
FECHA: 09/2013
2
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
1. Índice general
ÍNDICE GENERAL
2 Memoria ................................................................... 8
2.1
Objetivo del proyecto .................................................................................. 8
2.2
Alcance.......................................................................................................... 8
2.3 Normas y referencias ................................................................................... 8
2.3.1
Normas aplicadas ................................................................................. 8
2.3.2
Bibliografía ........................................................................................... 8
2.3.3
Programas informáticos ....................................................................... 8
2.4 Introducción en sistemas de conversión de energía eólica a eléctrica .... 9
2.4.1
Energía eólica ....................................................................................... 9
2.4.2
Aerogeneradores ................................................................................... 9
2.4.2.1 Clasificación de los aerogeneradores ............................................... 9
2.4.2.1.1 Según tipo de orientación del eje ............................................... 9
2.4.2.1.2 Según tipo de orientación respecto al viento ........................... 11
2.4.2.1.3 Según el número de palas ......................................................... 12
2.4.2.1.4 Según tipo de generador ........................................................... 14
2.4.2.2 Características constructivas .......................................................... 17
2.4.3
Principios de conversión de energía eólica ....................................... 20
2.4.3.1 Introducción .................................................................................... 20
2.4.3.2 Potencia disponible del viento ........................................................ 20
2.4.3.3 Potencia extraída por un aerogenerador ........................................ 22
2.4.3.3.1 Ley de Betz ................................................................................ 22
2.4.3.3.2 Coeficiente máximo de potencia ............................................... 24
2.4.3.3.3 Velocidad especifica TSR (λ) .................................................... 24
2.4.3.3.4 Coeficiente de potencia (Cp) .................................................... 24
2.4.3.3.5 Potencia extraída por el aerogenerador .................................. 25
2.4.4
Curva potencia- velocidad y punto de máxima potencia.................. 25
2.5 El generador asíncrono doblemente alimentado (DFIG) ....................... 27
2.5.1
Introducción........................................................................................ 27
2.5.2
Principio de funcionamiento .............................................................. 27
2.5.2.1 Máquina de inducción ..................................................................... 27
2.5.2.2 Convertidor ..................................................................................... 28
2.5.2.3 Crowbar........................................................................................... 29
2.5.2.4 Balance de potencias ....................................................................... 30
2.5.3
Transformada de Park........................................................................ 32
2.5.4
Ecuaciones en régimen dinámico del generador DFIG ................... 33
2.6 Estudio de las perturbaciones en el aerogenerador ................................ 34
2.6.1
Perturbaciones mecánicas .................................................................. 34
2.6.1.1 Variaciones bruscas de la velocidad del viento .............................. 34
2.6.1.2 Perturbación debido al paso de la pala por la torre....................... 34
2.6.2
Perturbaciones eléctricas ................................................................... 35
2.6.2.1 Huecos de tensión ............................................................................ 35
2.6.2.1.1 Introducción ............................................................................. 35
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
1. Índice general
2.6.2.1.2 Causantes de los huecos de tensión ......................................... 35
2.6.2.1.3 Tipologías de huecos de tensión .............................................. 36
2.7 Modelado del sistema DFIG en Simulink® ............................................. 41
2.7.1
Modelo aerogenerador ....................................................................... 41
2.7.2
Curva de potencia ............................................................................... 42
2.7.3
Modelo del generador DFIG .............................................................. 45
2.7.4
Modelo de control lado rotor (RSC)................................................... 47
2.7.5
Modelo del Pitch control .................................................................... 50
3 Resultados de simulación del modelo DFIG.........54
3.1
Funcionamiento en condiciones nominales ............................................. 55
3.2
Balances de potencia.................................................................................. 57
3.3
Pitch control ............................................................................................... 59
3.4 Resultado ante perturbaciones mecánicas .............................................. 61
3.4.1
Cambio brusco de la velocidad del viento en forma de rampa, ........ 61
3.4.2
Cambio brusco de la velocidad del viento en forma de escalón,....... 63
3.4.3
Efecto de la sombra de la torre sobre las aspas ................................. 65
3.5 Resultado ante perturbaciones eléctricas ................................................ 67
3.5.1
DFIG sometido a huecos de tensión tipo A, C, D, F y G profundidad
del 10 %
67
3.5.2
DFIG sometido a huecos de tensión tipo A, C, D, F y G profundidad
del 50 %
71
3.5.4
DFIG sometido a huecos de tensión A, C, D, F y G profundidad del
90 %
75
3.6
Respuesta ante protección Crowbar ........................................................ 79
3.7
Conclusiones ............................................................................................... 81
Tarragona, a 6 de Septiembre de 2013.
EL TÉCNICO:
José Manuel Torres Olmedo
4
Análisis de los efectos ante perturbaciones eléctricas y
mecánicas en el generador de inducción de doble
alimentación (DFIG).
2. MEMORIA
TITULACIÓN: Grado Ingeniería Eléctrica
AUTOR: José Manuel Torres Olmedo
DIRECTOR: José Antonio Barrado Rodrigo
FECHA: 09/2013
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
2. Memoria
INDICE MEMORIA
2 Memoria ................................................................... 8
2.1
Objetivo del proyecto .................................................................................. 8
2.2
Alcance.......................................................................................................... 8
2.3 Normas y referencias ................................................................................... 8
2.3.1
Normas aplicadas ................................................................................. 8
2.3.2
Bibliografía ........................................................................................... 8
2.3.3
Programas informáticos ....................................................................... 8
2.4 Introducción en sistemas de conversión de energía eólica a eléctrica .... 9
2.4.1
Energía eólica ....................................................................................... 9
2.4.2
Aerogeneradores ................................................................................... 9
2.4.2.1 Clasificación de los aerogeneradores ............................................... 9
2.4.2.1.1 Según tipo de orientación del eje ............................................... 9
2.4.2.1.2 Según tipo de orientación respecto al viento ........................... 11
2.4.2.1.3 Según el número de palas ......................................................... 12
2.4.2.1.4 Según tipo de generador ........................................................... 14
2.4.2.2 Características constructivas .......................................................... 17
2.4.3
Principios de conversión de energía eólica ....................................... 20
2.4.3.1 Introducción .................................................................................... 20
2.4.3.2 Potencia disponible del viento ........................................................ 20
2.4.3.3 Potencia extraída por un aerogenerador ........................................ 22
2.4.3.3.1 Ley de Betz ................................................................................ 22
2.4.3.3.2 Coeficiente máximo de potencia ............................................... 24
2.4.3.3.3 Velocidad especifica TSR (λ) .................................................... 24
2.4.3.3.4 Coeficiente de potencia (Cp) .................................................... 24
2.4.3.3.5 Potencia extraída por el aerogenerador .................................. 25
2.4.4
Curva potencia- velocidad y punto de máxima potencia.................. 25
2.5 El generador asíncrono doblemente alimentado (DFIG) ....................... 27
2.5.1
Introducción........................................................................................ 27
2.5.2
Principio de funcionamiento .............................................................. 27
2.5.2.1 Máquina de inducción ..................................................................... 27
2.5.2.2 Convertidor ..................................................................................... 28
2.5.2.3 Crowbar........................................................................................... 29
2.5.2.4 Balance de potencias ....................................................................... 30
2.5.3
Transformada de Park........................................................................ 32
2.5.4
Ecuaciones en régimen dinámico del generador DFIG ................... 33
2.6 Estudio de las perturbaciones en el aerogenerador ................................ 34
2.6.1
Perturbaciones mecánicas .................................................................. 34
2.6.1.1 Variaciones bruscas de la velocidad del viento .............................. 34
2.6.1.2 Perturbación debido al paso de la pala por la torre....................... 34
2.6.2
Perturbaciones eléctricas ................................................................... 35
2.6.2.1 Huecos de tensión ............................................................................ 35
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
2. Memoria
2.6.2.1.1 Introducción ............................................................................. 35
2.6.2.1.2 Causantes de los huecos de tensión ......................................... 35
2.6.2.1.3 Tipologías de huecos de tensión .............................................. 36
2.7 Modelado del sistema DFIG en Simulink® ............................................. 41
2.7.1
Modelo aerogenerador ....................................................................... 41
2.7.2
Curva de potencia ............................................................................... 42
2.7.3
Modelo del generador DFIG .............................................................. 45
2.7.4
Modelo de control lado rotor (RSC)................................................... 47
2.7.5
Modelo del Pitch control .................................................................... 50
7
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
2. Memoria
2
Memoria
2.1
Objetivo del proyecto
Este proyecto tiene como objetivo realizar un estudio de los efectos ante
perturbaciones eléctricas y mecánicas de la máquina de inducción doblemente alimentada
(DFIG). Para analizar dichos efectos se desarrollará un modelo en Simulink de una turbina
eólica con un DFIG, y se realizaran una serie de simulaciones con el propósito de
comprender su funcionamiento en régimen dinámico frente a las perturbaciones
mencionadas.
2.2
Alcance
En este proyecto se realizara lo siguiente:
2.3
Comprender la conversión de energía eólica a eléctrica
Analizar las distintos tipos de sistemas de conversión (aerogeneradores).
Comprender el funcionamiento de un generador DFIG
Modelar el generador DFIG en Simulink.
Analizar perturbaciones mecánicas.
Analizar perturbaciones eléctricas.
Normas y referencias
2.3.1 Normas aplicadas
UNE-EN 50160:2011: Características de la tensión suministrada por las redes
generales de distribución.
P.O.12.3: Requisitos de respuesta frente a huecos de tensión de las instalaciones
eólicas (REE)
2.3.2 Bibliografía
[1] Sistemas eólicos de producción de energía eléctrica; J.L.Rodriguez, J.C. Burgos, S.
Arnalte; Editorial Rueda 2003.
[2] Máquinas eléctricas; Jesus Fraile Mora; Editorial McGraw Hill, Sexta edición 2008.
[3] A.Rolán, “Estudio del efecto de los huecos de tensión en el generador de inducción
doblemente alimentado”. Tesis doctoral, Departament d’Enginyeria Elèctrica,
Universitat Politècnica de Catalunya, Novembre de 2011.
[4] Isabel Gamarra Rodríguez, “Control de un generador doblemente alimentado para
turbinas eólicas”; Proyecto final de carrera; Universitat Politècnica de Catalunya,
Junio de 2009.
[5] B. Wu, Y. Lang, N. Zargari and S. Kouro, Power Conversion and Control of Wind
Energy Systems, John Wiley & Sons, Inc., 2011.
[6] M.H.J. Bollen, Understanding power quality problems: Voltage sags and
interruptions; Nueva York: IEEE Press, 2000.
[7] J.G. Slootweg, H. Polinder y W. L. Kling; Representing wind turbine electrical
generating systems in fundamental frequency simulations; IEEE
[8] Cuaderno de aplicaciones técnicas nº12: Plantas eólicas; ABB
2.3.3 Programas informáticos
-
SimPowerSystems de Simulink (Matlab R2010b)
8
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
2. Memoria
2.4
Introducción en sistemas de conversión de energía eólica a eléctrica
2.4.1 Energía eólica
La energía eólica es la energía renovable más madura y desarrollada. Genera
electricidad a través de la fuerza del viento, mediante la utilización de la energía cinética
producida por efecto de las corrientes de aire. Se trata de una fuente de energía limpia e
inagotable, que reduce la emisión de gases de efecto invernadero y preserva el
medioambiente.
La energía eólica ha sido aprovechada desde la antigüedad para mover los barcos
impulsados por velas o hacer funcionar la maquinaria de molinos al mover sus aspas. Desde
principios del siglo XX, produce energía eléctrica a través de los aerogeneradores. La energía
eólica mueve una hélice y, mediante un sistema mecánico, hace girar el rotor de un generador
que produce energía eléctrica. [1]
2.4.2 Aerogeneradores
2.4.2.1 Clasificación de los aerogeneradores
Los aerogeneradores se pueden clasificar según estos criterios:
2.4.2.1.1 Según tipo de orientación del eje
a) Aerogeneradores de eje vertical – VAWT (Vertical Axis Wind Turbine): El eje de
rotación se encuentra perpendicular a la dirección del viento. Las principales ventajas
de este tipo de turbinas son la ausencia de sistemas de orientación y
direccionamiento. Dentro de esta familia de turbinas se encuentran dos tipos:
a. Aerogenerador Savonius: Es el modelo más simple de aerogenerador y consta
de dos (o cuatro) chapas verticales, sin perfil de ala y curvadas en forma de
semicilindro (Figura 1). También se denomina "aerogenerador de resistencia"
ya que el par motor sobre el eje está generado por la diferencia de resistencia
(fricción) que las superficies verticales dispuestas simétricamente respecto al
eje ofrecen al viento. Las principales características del aerogenerador
Savonius son:
Aerogenerador “lento”.
Poca eficiencia.
Utilizable con vientos de poca intensidad y en un rango limitado
Necesidad de un control de velocidad adecuado para mantener la
eficiencia dentro de unos valores aceptables.
Imposibilidad de reducir la superficie aerodinámica en caso de
velocidad superior a la nominal debido a sus palas fijas.
Necesidad de una estructura robusta que resista los vientos extremos
Válido solo para aplicaciones de poca potencia
Poco ruidoso.
9
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
2. Memoria
Figura 1: Aerogenerador Savonius
b. Aerogenerador Darrieus: Son aerogeneradores de eje vertical y de
"sustentación", ya que las superficies expuestas al viento presentan un perfil
de ala capaz de generar una distribución de la presión a lo largo de la pala y,
por tanto, un par en el eje de rotación. Con relación a los aerogeneradores de
“resistencia” Savonius, los de tipo Darrieus (y todos los aerogeneradores de
"sustentación") proporcionan una mayor eficiencia al tener menos pérdidas
por fricción. No obstante, un aerogenerador Darrieus es incapaz de arrancar
por sí solo dado que, independientemente de la velocidad del viento, el par
de arranque es nulo: como consecuencia, este aerogenerador necesita un
dispositivo auxiliar. Las principales características del aerogenerador
Darrieus son:
Aerogenerador “rápido”.
Eficiencia menor que los aerogeneradores de eje horizontal.
Adaptación a los cambios de dirección del viento.
Eficiente para vientos con una notable componente vertical de la
velocidad.
Utilizable con vientos de poca intensidad y un rango limitado.
Necesidad de un dispositivo mecánico para el paro de la turbina.
Utilizable para aplicaciones de gran potencia.
Poco ruidoso y con vibraciones que se limitan a la cimentación.
Capaz de funcionar con vientos turbulentos.
Figura 2: Aerogenerador Darrieus
10
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
2. Memoria
b) Aerogeneradores de eje horizontal – HAWT (Horizontal Axis Wind Turbine):
Son los aerogeneradores más utilizados. Su eje de rotación se encuentra paralelo al
terreno y a la dirección del viento. Su principal ventaja es que se puede aprovechar
mejor las corrientes de aire y permiten obtener una eficacia más elevada. Este tipo
de aerogeneradores tiene diversas familias en función de numero de palas,
orientación respecto al viento, etc... donde se explicaran con mayor énfasis en los
siguientes apartados.
Figura 3: Aerogeneradores de eje horizontal
2.4.2.1.2 Según tipo de orientación respecto al viento
A barlovento: Los aerogeneradores de eje horizontal a barlovento, llamados así
porque el viento encuentra antes el rotor que la torre, tienen una mayor eficiencia que
los aerogeneradores a sotavento, ya que no presentan interferencias aerodinámicas
con la torre. En cambio, tienen el inconveniente de no alinearse autónomamente con
relación al viento, por lo que necesitan una aleta direccional o un sistema de
orientación.
A sotavento: Los aerogeneradores de eje horizontal a sotavento acusan los efectos
negativos de la interacción torre-rotor, pero se alinean autónomamente y pueden
utilizar un rotor flexible para resistir los vientos fuertes.
Figura 4: Tipo de orientación respecto al viento
11
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
2. Memoria
2.4.2.1.3 Según el número de palas
a) Monopala: Permite una mayor velocidad de rotación, reducción de masas y costes
de material, en las palas, en la caja multiplicadora y en el generador. Tienen el
inconveniente de necesitar un equilibrado muy preciso con un contrapeso de
compensación, y existe un mayor riesgo de desequilibrio aerodinámico y vibraciones
con la aparición de cargas de fatiga. También aumenta la generación de ruidos. Del
orden del doble que un rotor tripala
Figura 5: Aerogenerador monopala
b) Bipala: Reduce el coste de material y equipos respecto del rotor tripala, pero presenta
también la desventaja respecto a éste ultimo de un mayor nivel de esfuerzos
dinámicos. De forma similar a rotor monopala se producen esfuerzos mecánicos
originados por la variación del perfil de la velocidad del viento con la altura. Además
estos rotores presentan respecto a los tripalas un mayor nivel de vibraciones y de
ruido.
Figura 6: Aerogenerador bipala
12
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
2. Memoria
c) Tripala: Presentan como principal ventaja la de un giro más suave y uniforme debido
a las propiedades de su momento de inercia, por lo que se minimiza la inducción de
esfuerzos sobre la estructura. Además gira a menor velocidad que los rotores mono
y bipala, disminuyéndose los esfuerzos de la fuerza centrífuga, el nivel de
vibraciones y la producción de ruido. En la actualidad el rotor tripala es la
configuración más usada en turbinas eólicas rápidas dedicadas a la generación de
electricidad.
Figura 7: Aerogeneradores tripala
d) Multipala: Los rotores multipala se caracterizan por tener un numero de palas que
puede variar de 6 a 24 y por lo tanto una solidez elevada. Presentan elevados pares
de arranque y una reducida velocidad de giro. La velocidad lineal en la punta de las
palas de estas máquinas, en condiciones de diseño, es del mismo orden que la
velocidad del viento incidente. Estas características hacen que la aplicación
fundamental de estas turbinas haya sido tradicionalmente el bombeo de agua. No se
utilizan en aplicaciones de generación de energía eléctrica debido a su bajo régimen
de giro [3].
Figura 8: Aerogenerador multipala
13
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
2. Memoria
2.4.2.1.4 Según tipo de generador
a) Generador asíncrono de jaula de ardilla: Un generador asíncrono de jaula de ardilla
puede funcionar como generador eléctrico de velocidad prácticamente constante,
como se puede observar en la figura 9.
Este generador presenta las ventajas de tener mayor fiabilidad, robustez y menor
precio, debido a la ausencia de contactos rozantes y la sencillez del rotor. El
inconveniente es que para poder generar a velocidad variable se necesita un
convertidor de frecuencia conectado entre el estator y la red, donde dicho convertidor
deberá ser de gran potencia debido a que tendrá que rectificar toda la potencia
generada.
Figura 9: Generador asíncrono jaula de ardilla
b) Generador asíncrono con control de deslizamiento: Este tipo de sistemas constituye
la tecnología más simple de los aerogeneradores de velocidad variable. En ellos se
realiza un control del deslizamiento de un generador de inducción de rotor bobinado
a través de la regulación de una resistencia conectada a su circuito rotórico. El empleo
de sistemas de este tipo permite controlar de forma dinámica el par electromagnético
del generador en un margen de velocidad comprendido entre la velocidad de
sincronismo y una velocidad del 10% supersíncrona, sin la necesidad de modificar
la frecuencia de la fuente conectada al estator del generador. [1]
a. Mediante resistencias rotóricas: Este sistema consiste en conectar una
resistencia variable o reóstato en el rotor del generador, donde se podrá
modificar la resistencia total que presenta el circuito del rotor.
En la siguiente imagen se puede observar que variando el valor de la
resistencia externa conectada al rotor, es posible desarrollar un par
determinado a distintas velocidades, cuanto mayor sea el valor de la
resistencia obtenemos mayor rango de velocidades a la que podremos
generar.
14
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
2. Memoria
Figura 10: Generador asíncrono con control de deslizamiento mediante resistencias
rotóricas y característica par velocidad
b. Con recuperación de la energía: En los sistemas descritos en el apartado
anterior, parte de la energía mecánica que el generador absorbe por el eje se
disipa en la resistencia externa conectada al rotor. Sin embargo, existe una
variante de este método en la que la energía eléctrica generada en el rotor de
la máquina, en lugar de ser disipada en unas resistencias, se restituye a la red,
aumentado con ello la potencia generada. Este método es conocido como
método Scherbius estático.
Figura 11: Generador asíncrono con control de deslizamiento mediante recuperación
de energía
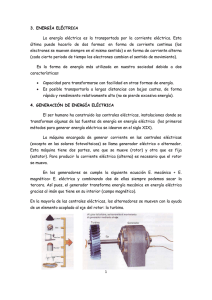
c) Generador asíncrono doblemente alimentado: Este sistema trata de un generador de
inducción de rotor devanado, alimentado por un convertidor compuesto por dos
convertidores electrónicos CA/CC reversibles. El propósito de lo anterior es generar
una tensión de valor eficaz y frecuencia constante aunque su eje gire a velocidad
variable, en régimen subsíncrono o supersíncrono. A diferencia de los sistemas
explicados en el apartado anterior con el convertidor conectado al lado del rotor (CR)
se puede regular la amplitud, frecuencia y fase de la tensión aplicada al rotor, lo cual
permite realizar un control vectorial de la máquina para regular el par
electromagnético y el factor de potencia del aerogenerador en un amplio rango de
velocidades de giro, por otra parte el convertidor del lado de la red (CG) hace posible
15
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
2. Memoria
realizar una regulación de las potencias activas y reactivas, lo cual permite extraer o
inyectar potencia activa generada por el rotor de la máquina y controlar la potencia
reactiva intercambiada entre este convertidor y la red. [1] Este será el generador de
estudio en este proyecto
Figura 12: Generador asíncrono doblemente alimentado
d) Generador síncrono con excitación independiente: Se trata de un generador síncrono
con rotor devanado, conectado a un convertidor de frecuencia para una conversión
inmediata a corriente continua. También disponen de un convertidor de frecuencia
entre el estator y la red que permite variar la frecuencia de salida del generador, de
tal manera que permite generar a velocidad variable.
Figura 13: Generador síncrono con excitación independiente
e) Generador síncrono con imanes permanentes: Los generadores síncronos con
imanes permanentes constituyen unas de las alternativas más interesantes en
generación eólica a velocidad variable. La implementación de imanes permanentes,
permite eliminar los anillos rozantes y las perdidas en el devanado del rotor. Otra
ventaja es la reducción de tamaño de la máquina, la posibilidad de construir maquinas
con un gran número de polos con la consecuencia de poder eliminar la caja
multiplicadora y reducir las pérdidas mecánicas. Una de las características de esta
máquina es la robustez y fiabilidad que presenta, utilizándose mucho en parques
eólicos offshore.
16
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
2. Memoria
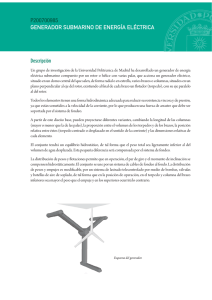
2.4.2.2 Características constructivas
Como se explicó en los apartados anteriores existen muchas variantes de
aerogeneradores, sin embargo la tecnología actual de los aerogeneradores ha evolucionado
hacia el aerogenerador de eje horizontal, tripala, orientadas a barlovento y con torre tubular.
Debido a este motivo, se analizara a continuación los componentes de este tipo de máquina.
Figura 14: Componentes de un aerogenerador
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11. Frenos mecánicos
12. Generador
13. Convertidor de potencia y
dispositivos eléctricos de control y
protección
14. Transformador
15. Anemómetros
16. Estructura de la góndola
17. Torre de soporte
18. Mecanismo actuador de orientación
Pala
Soporte de pala
Actuador del ángulo de paso
Buje
Cubierta
Soporte principal
Eje principal
Luces de señalización aérea
Multiplicador
Dispositivos hidráulicos de
refrigeración
A continuación describiremos cada una de las partes de la estructura de un
aerogenerador:
a) La torre.
Es la parte que soporta la góndola y el rotor. Normalmente suelen ser de longitud
elevada, ya que la velocidad del viento es mayor cuánto más lejos estamos del nivel del
suelo. Pueden ser tubulares o de celosía. Las primeras son más seguras para el personal de
mantenimiento, ya que disponen de una escalera interior que llega hasta la parte superior de
la turbina. Las segundas, aunque son más inseguras, tienen un coste es mucho más barato.
17
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
2. Memoria
b) La góndola.
Es un habitáculo que contiene los componentes más importantes de un aerogenerador,
como el multiplicador o el generador eléctrico. Se puede acceder a ella desde la torre de la
turbina.
c) El multiplicador.
Con el eje de baja velocidad a su izquierda y el de alta velocidad a su derecha, el
multiplicador permite que el segundo gire 50 veces más rápido que el primero.
d) El eje de baja velocidad.
Se trata de un eje que conecta el buje del rotor al multiplicador. Por dentro del eje
encontramos unos conductos del sistema hidráulico usados para los frenos aerodinámicos.
e) El buje del rotor.
El buje ("hub" en inglés) es el elemento al que van unidas las palas. Situado en la parte
frontal del aerogenerador, acoplado al eje de baja velocidad, es el único elemento exterior
que gira. Se le suele unir los rodamientos de pala, que minimizan el rozamiento de las palas.
Normalmente se fabrica con acero fundido.
f) El eje de alta velocidad.
Si gira con la velocidad adecuada, este eje es el que permite que el generador eléctrico
funcione. Dicha velocidad equivale aproximadamente a 1500 revoluciones por minuto (min1
). Además, lleva acoplado, por si falla el freno aerodinámico, un freno de disco mecánico
de emergencia.
g) El generador eléctrico.
Se considera un generador eléctrico a todo aquél dispositivo que pueda mantener una
diferencia de potencial eléctrico entre sus bornes (polos o terminales). Gracias a la acción de
un campo magnético, un generador consigue su objetivo, transformar energía mecánica en
eléctrica. En los aerogeneradores, el generador suele ser asíncrono o de inducción.
h) Las palas del rotor.
Son las responsables de "capturar" el viento y transmitir su potencia al buje. Existen
de muchos tamaños y diseños, dependiendo normalmente de la potencia que se quiera
generar.
i) La unidad de refrigeración.
Consiste en un ventilador eléctrico que enfría el generador. Contiene también una
unidad refrigerante por aceite o por agua, que se usa para enfriar el propio aceite del
multiplicador.
18
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
2. Memoria
j) El controlador eléctrico.
Se trata de un ordenador el cual monitoriza las condiciones del aerogenerador, y
controla el mecanismo de orientación (que vigila la dirección del viento mediante la
veleta).Si ocurre cualquier problema en el aerogenerador, como, por ejemplo, un
sobrecalentamiento en el multiplicador, automáticamente para el aerogenerador y "llama" al
operario encargado de la turbina a través de un módem.
k) El anemómetro y la veleta.
El anemómetro es un dispositivo usado para medir la velocidad del viento. La veleta
es un aparato para comprobar la dirección del viento. En un aerogenerador, las señales
eléctricas del anemómetro las utiliza el controlador electrónico para conectar el
aerogenerador cuando el viento alcanza los 5 m/s. Asimismo, si el viento sobrepasa los 25
m/s, el ordenador parará el aerogenerador para proteger la turbina y sus alrededores. Las
señales enviadas por la veleta son utilizadas por el controlador para girar el aerogenerador
en contra del viento.
19
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
2. Memoria
2.4.3 Principios de conversión de energía eólica
2.4.3.1 Introducción
La energía eólica es la energía obtenida del viento, es decir, aquella que se obtiene de
la energía cinética generada por efecto de las corrientes de aire y así mismo las vibraciones
que el aire produce. Para transformar dicha energía cinética del aire en energía eléctrica se
utilizan aerogeneradores, esta energía depende de la interacción entre las palas del rotor y el
viento, transformando la energía cinética del viento en energía mecánica y por ultimo
transformando esta última en eléctrica.
2.4.3.2 Potencia disponible del viento
La energía cinética ‘Ec’ de una masa de aire ‘m’ que se mueve a una velocidad ‘v1’
constante viene dada por la expresión:
𝐸𝑐 =
1
· 𝑚 · 𝑣1 2
2
(0)
Figura 15: Volumen formado por la superficie de las aspas en un determinado
tiempo
Para calcular la masa de aire que pasa, se considera el volumen (V) que atraviesa la superficie
(S) de las aspas en un tiempo (t). En el dibujo, ese volumen es del cilindro, cuya base es la
superficie de las aspas, y la altura es el producto de la velocidad del aire por el tiempo:
𝑉 = 𝑆 · (𝑣 · 𝑡)
(1)
La masa de aire que pasa en un tiempo ‘t’ será el producto de la densidad por el
volumen de aire que pasa en ese tiempo:
𝑚=𝜌· 𝑉
(2)
De tal forma, que substituyendo nos queda que:
𝐸𝑐 =
1
· 𝜌 · 𝑆 · 𝑣1 3 · 𝑡
2
20
(3)
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
2. Memoria
Y sabiendo que la potencia es la energía con respecto al tiempo:
𝑃𝑑𝑖𝑠𝑝 =
𝐸
1
= · 𝜌 · 𝑆 · 𝑣1 3
𝑡
2
(4)
Como se puede observar en la ecuación [4], la potencia disponible ‘Pdisp’ varia con el
cubo de la velocidad del viento, ya que los demás términos de la ecuación se mantienen
constantes.
Por ejemplo, tomando una densidad estándar al nivel del mar de: 𝜌 =1.225 kg /m, y una
superficie con valor unitario, tenemos:
𝑣1 = 5 𝑚/𝑠
⇒
𝑃𝑑𝑖𝑠𝑝 = 76 𝑊⁄𝑚2
𝑣1 = 6 𝑚/𝑠
⇒
𝑃𝑑𝑖𝑠𝑝 = 132 𝑊⁄𝑚2
𝑃𝑑𝑖𝑠𝑝 = 210 𝑊⁄𝑚2
Por la tanto, con incrementos de viento de 1 m/s, obtenemos aumentos de potencia entre el
60% y 70%.
𝑣1 = 7 𝑚/𝑠
⇒
Por otra parte, tomando un valor constante de viento, como por ejemplo 7 m/s, podemos
calcular el área y por lo tanto el diámetro para varias potencias.
𝑃 = 1𝑘𝑊
⇒
𝑆 = 4,7 𝑚2
𝑃 = 10𝑘𝑊
⇒
𝑆 = 47,6 𝑚2
⇒ 𝐷 = 7,8𝑚
𝑃 = 20𝑘𝑊
⇒
𝑆 = 95,2𝑚2
⇒ 𝐷 = 11𝑚
⇒ 𝐷 = 2,5𝑚
Figura 16: Potencia en función del área de barrido [8]
21
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
2. Memoria
2.4.3.3 Potencia extraída por un aerogenerador
2.4.3.3.1 Ley de Betz
Para calcular la potencia aprovechada por el rotor del aerogenerador, debemos utilizar
la ley de Betz, La teoría de Betz se basa en las siguientes hipótesis:[8]
El conjunto de las palas del aerogenerador equivale a un "disco poroso" de
espesor nulo, disco actuador con un número infinito de palas.
La masa de aire que fluye a través del disco permanece separada de la masa
que lo rodea.
La masa de aire fluye solo en dirección longitudinal.
La deceleración del aire en el disco actuador se distribuye uniformemente en
toda la sección del disco.
En las secciones suficientemente lejanas aguas arriba y aguas abajo la presión
es igual a la atmosférica.
Aparte del aerogenerador, el flujo eólico no encuentra obstáculos ni antes ni
después.
El viento es estacionario y su intensidad permanece constante con la altura.
No se producen efectos rotativos sobre la masa de aire.
Se desprecia la compresibilidad del aire, es decir, la densidad se considera
constante.
Figura 17:
Aplicando la ley de conservación de la masa tenemos que:
𝑚̇ = 𝜌 · 𝐴1 · 𝑣1 = 𝜌 · 𝑆 · 𝑣𝑎𝑣𝑔 = 𝜌 · 𝐴2 · 𝑣2
(5)
Donde 𝑣1 es la velocidad en la parte frontal del rotor y 𝑣2 es la velocidad
aguas abajo del rotor, y 𝑣𝑎𝑣𝑔 es la velocidad a la que el dispositivo de alimentación
de fluido 𝜌 es la densidad del fluido, y 𝑆 es la sección de la turbina.
La potencia viene determinada por las siguientes expresiones:
𝑃 =
𝑑𝐸
𝑑𝑥
=𝐹
= 𝐹 · 𝑣𝑎𝑣𝑔
𝑑𝑡
𝑑𝑡
22
(6)
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
2. Memoria
La fuerza ejercida sobre el viento por el rotor puede ser escrito como:
𝑃 = 𝐹 · 𝑣𝑎𝑣𝑔 = (𝑚̇ · ∆𝑣) · 𝑣𝑎𝑣𝑔 = 𝜌 · 𝑆 · 𝑣𝑎𝑣𝑔 2 · (𝑣1 − 𝑣2 )
(7)
y la potencia calculada mediante la energía cinética viene determinada por:
𝑃 =
𝑑𝐸
1
= = · 𝜌 · 𝑆 · 𝑣𝑎𝑣𝑔 · (𝑣1 − 𝑣2 )2
𝑑𝑡
2
(8)
igualando la ecuación [7] por la ecuación [8], tenemos:
1
· 𝜌 · 𝑆 · 𝑣𝑎𝑣𝑔 · (𝑣1 − 𝑣2 )2
2
1
𝑣𝑎𝑣𝑔 2 · (𝑣1 − 𝑣2 ) = · 𝑣𝑎𝑣𝑔 · (𝑣1 − 𝑣2 )2
2
1
𝑣𝑎𝑣𝑔 = · (𝑣1 + 𝑣2 )
2
𝜌 · 𝑆 · 𝑣𝑎𝑣𝑔 2 · (𝑣1 − 𝑣2 ) =
(9)
( 10 )
( 11 )
sustituyendo la ecuación [7] con [11]:
𝑃=
=
𝑑𝐸 1
= · 𝜌 · 𝑆 · (𝑣1 + 𝑣2 ) · (𝑣1 − 𝑣2 )2
𝑑𝑡 4
1
𝑣2 2
𝑣2
𝑣2 3
· 𝜌 · 𝑆 · 𝑣1 3 · (1 − ( ) + ( ) − ( ) )
4
𝑣1
𝑣1
𝑣1
( 12 )
y derivando la función e igualando-la a cero que 𝑃 alcanza su valor máximo cuando:
𝑣2 1
=
𝑣1 3
( 13 )
8
· 𝜌 · 𝑆 · 𝑣1 3
27
( 14 )
Sustituyendo queda:
𝑃𝑚𝑎𝑥 =
23
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
2. Memoria
2.4.3.3.2 Coeficiente máximo de potencia
Se define el coeficiente de potencia Cp (o coeficiente de eficiencia) como la relación
entre la potencia máxima extraída y la potencia disponible del viento:
8
8
3
𝑃𝑚𝑎𝑥 27 · 𝜌 · 𝑆 · 𝑣1
𝐶𝑃 =
=
= 27 = 0,59
1
1
𝑃𝑑𝑖𝑠𝑝
3
2 · 𝜌 · 𝑆 · 𝑣1
2
Donde 𝐶𝑃 = 0,59 es conocido
fundamental:
( 15 )
como el límite de Betz y expresa concepto
"La máxima potencia teórica extraíble de una corriente de aire con un
aerogenerador ideal no puede superar el 59% de la potencia disponible del viento
incidente".
El coeficiente de potencia es en función del ángulo de inclinación de la pala (β) y de
la velocidad especifica TSR (λ).
2.4.3.3.3 Velocidad especifica TSR (λ)
La relación de velocidad específica o periférica Tip-Speed-Ratio (λ), es un término
que sirve para comparar el funcionamiento de máquinas eólicas diferentes, por lo que
también se le suele denominar velocidad específica.
El TSR indica que la periferia de la pala circula a una velocidad TSR veces mayor que
la velocidad del viento ‘v’ y es la relación entre la velocidad periférica de la pala (𝑅𝑡𝑢𝑟𝑏𝑖𝑛𝑎 ·
𝜔𝑡𝑢𝑟𝑏𝑖𝑛𝑎 ) y la velocidad del viento, en la forma:
𝜆=
𝑅𝑡𝑢𝑟𝑏𝑖𝑛𝑎 · 𝜔𝑡𝑢𝑟𝑏𝑖𝑛𝑎
𝑣𝑣𝑖𝑒𝑛𝑡𝑜
( 16 )
2.4.3.3.4 Coeficiente de potencia (Cp)
El coeficiente de potencia puede ser calculado de forma aproximada con la siguiente
expresión matemática:
𝑐𝑝 (𝛽, 𝜆) = 𝐶1 · (𝐶2 ·
𝜆1 =
1
1
−𝐶 ·
− 𝐶3 · 𝛽 − 𝐶4 · 𝛽 𝐶5 − 𝐶6 ) · 𝑒 7 𝜆1
𝜆1
1
1
𝐶9
−
𝜆 + 𝐶8 · 𝛽 1 + 𝛽 3
( 17 )
( 18 )
donde:
o β = es el ángulo de paso de pala
o λ = velocidad especifica (TSR)
o Los coeficientes c1…..c9 dependen del tipo de turbina eólica, y será
suministrado por el fabricante.
24
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
2. Memoria
2.4.3.3.5 Potencia extraída por el aerogenerador
Sabido de que la potencia extraída por un aerogenerador es:
1
𝑃𝑎𝑒𝑟𝑜 = 𝑐𝑝 (𝛽, 𝜆) · · 𝜌 · 𝑆 · 𝑣1 3
2
( 19 )
La potencia eléctrica se pude calcular con la siguiente expresión:
1
𝑃𝑒 = 𝜂𝑒 · 𝜂𝑚 · 𝑐𝑝 (𝛽, 𝜆) · · 𝜌 · 𝑆 · 𝑣1 3
2
( 20 )
Donde:
𝜂𝑚 es el rendimiento mecánico global de toda la transmisión, desde el rotor
hasta el generador eléctrico pasando por el multiplicador.
𝜂𝑒 es el rendimiento del generador eléctrico.
2.4.4 Curva potencia- velocidad y punto de máxima potencia
La principal ventaja de los generadores a velocidad variable es que están diseñados
para trabajar a una velocidad óptima en función de la velocidad de viento para obtener el
punto máximo de potencia, a esto se le conoce como seguimiento del punto máximo de
potencia (en inglés maximum power point tracking o MPPT).
La base del MPPT es que dada una velocidad de viento, existe una potencia máxima
que es posible extraer si se hace girar el rotor eólico a una determinada velocidad. Sin
embargo en la práctica se suele extraer la potencia óptima, ya que a determinadas
velocidades de viento no interesa extraer la potencia máxima. [3]
Todo esto se expresa en la siguiente imagen, donde se puede observar tres zonas de
trabajo:
Parking Mode: Zona donde la velocidad de la turbina es inferior a la velocidad
mínima (en el caso de la imagen 0.4 pu), por lo tanto, no se extraerá potencia
del viento.
Generator Control: Zona donde la velocidad de la turbina esta entre la
velocidad máxima y mínima (en el caso de la imagen entre 0.4 pu y 1.0 pu),
por lo tanto se extraerá la potencia máxima u optima en función de la velocidad
del viento. En esta zona cabe destacar la importancia del control del generador
para lograr el MPPT.
25
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
2. Memoria
Pitch Control: Zona donde la velocidad de giro es superior a la velocidad
máxima (en el caso de la imagen 1.0 pu), entonces se limita la potencia
disponible al valor de potencia nominal, variando el ángulo de paso de pala (β).
Figura 18: Curvas Potencia-Velocidad del aerogenerador y MPPT
26
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
2. Memoria
2.5
El generador asíncrono doblemente alimentado (DFIG)
2.5.1 Introducción
El generador de inducción doble alimentado (DFIG) es una máquina de inducción de
velocidad variable, muy utilizada en generadores eólicos. Esta máquina puede generar una
tensión de valor eficaz y frecuencia constante aunque se eje gire a velocidad variable. Para
ello se alimenta el devanado del rotor con un convertidor de frecuencia compuesto por dos
convertidores electrónicos CA/CC reversibles (RSC y GSC). El convertidor RSC permite
realizar un control vectorial de la máquina para regular el par electromagnético y el factor
de potencia del generador en un amplio rango de velocidades. Por otro lado el convertidor
GSC hace posible la regulación independiente de la potencia activa y reactiva, lo que permite
extraer o inyectar la potencia activa generada por el rotor y controlar la potencia reactiva
intercambiada entre el convertidor y la red.[3]
Figura 19: Generador inducción doblemente alimentado
2.5.2 Principio de funcionamiento
2.5.2.1 Máquina de inducción
El principio de funcionamiento del generador asíncrono se basa en crear mediante la
alimentación del estator un campo magnético en el entrehierro giratorio a la velocidad de
sincronismo. La velocidad de este campo está directamente relacionada con la frecuencia de
las corrientes estatóricas y con el número de pares de polos de la máquina, mediante la
expresión:
𝜔𝑠 =
2 · 𝜋 · 𝑓𝑆
𝑝
( 21 )
Si se alimenta el rotor con un sistema trifásico de tensiones de frecuencia 𝑓𝑟 , el rotor
también creara un campo magnético que girara a una velocidad:
𝜔𝑟 =
2 · 𝜋 · 𝑓𝑟
𝑝
27
( 22 )
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
2. Memoria
De tal forma que la combinación de ambas velocidades será la velocidad mecánica del
eje de la máquina (𝜔𝑚 ):
𝜔𝑚 = 𝜔𝑠 − 𝜔𝑟
( 23 )
También con estas ecuaciones se puede obtener el deslizamiento, que es lo que define
el cuadrante de funcionamiento de la máquina:
𝑠=
𝜔𝑠 − 𝜔𝑚 𝜔𝑟
=
𝜔𝑠
𝜔𝑠
( 24 )
Figura 20: Régimen de funcionamiento en función de la relación Par-Velocidad
De la última igualdad también podemos deducir que:
𝑓𝑟 = 𝑠 · 𝑓𝑠
( 25 )
Cuando la velocidad angular del rotor es mayor que la velocidad síncrona, el
deslizamiento es negativo. En este caso el rotor entrega energía eléctrica, es lo que se conoce
como modo de generación supersíncrono.
En el caso contrario, cuando la velocidad del rotor es menor que la velocidad de
síncrona, la velocidad angular del deslizamiento es positiva por lo que el rotor recibe energía
eléctrica de la red. Este hecho es conocido como modo de generación subsíncrono.
.
2.5.2.2 Convertidor
El DFIG es una máquina asíncrona con un rotor bobinado al que se puede acceder
desde el exterior a partir de unos anillos rozantes situados en su eje. Así, tanto el estator
como el rotor se pueden alimentar de manera independiente.
28
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
2. Memoria
Como se puede observar en la figura 19, el estator queda conectado directamente a la
red, y el rotor está conectado a la red mediante un convertidor AC-DC-AC reversible o backto-back, que nos permitirá inyectar al rotor corrientes de amplitud, fase y frecuencia deseadas
para realizar el control vectorial de la máquina.
Este convertidor consta de 2 partes:
RSC (Rotor-side converter): El RSC es el convertidor conectado al lado del
rotor. El conversor del lado del rotor controla independientemente la potencia
activa y reactiva de la máquina. Este control se realiza a través de los ejes d-q
(transformada de Park). De esta forma, la componente q de la corriente del
rotor Irq es usada para controlar la potencia reactiva, y la componente d de la
corriente del rotor Ird i es usada para controlar el torque de la turbina eólica,
por lo tanto, su velocidad.
GSC (Grid-side converter): El GSC es el convertidor conectado al lado de la
red. El conversor del lado de la red es el que mantiene el voltaje DC en un valor
predefinido, independiente de la magnitud y dirección de la potencia del rotor,
y además garantiza que la operación del conversor sea con un factor de
potencia de 1, es decir, que no genere ni consuma potencia reactiva. Esto
significa que el convertidor del lado de la red intercambia solo potencia activa
con la red, por lo tanto, la transmisión de potencia reactiva desde la máquina
doblemente alimentada hacia la red se realiza a través del estator.
2.5.2.3 Crowbar
Las caídas de tensión en la red se pueden producir por diferentes motivos:
Cortocircuitos en algún lugar del sistema de distribución.
Operaciones de conmutación asociados con desconexión temporal del
suministro.
Flujos de corrientes elevados causados por el arranque de grandes motores.
Por saturación de transformadores.
Las caídas en la tensión llevan a fallos de corto circuito causados mayormente
por equipos de desconexión. Estos fallos pueden ser simétricos (trifásicos o de
fase a tierra).o asimétricos (monofásicos o bifásicos o bifásicos a tierra).
La magnitud de las caídas de tensión en un punto del sistema depende
principalmente del tipo de fallo, de la distancia del fallo, de la configuración
del sistema y de la impedancia de la red.
Dependiendo del tipo de fallo las magnitudes de las caídas de tensión de cada fase
podrían ser igual en fallos simétricos o desiguales en fallos asimétricos. Hasta ahora para
evitar las elevadas corrientes en el sistema se aplica un crowbar en la parte del generador
conectado al rotor cuando las corrientes exceden un límite.
Mientras que el convertidor es cortocircuitado, el generador opera como un
generador normal de inducción. La velocidad de la máquina puede ser mayor que la
sincrónica antes del fallo, cuando este se produce la máquina se acelera. El punto de
29
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
2. Memoria
operación de la máquina es excedido durante el fallo en la red, al operar a velocidad
supersíncrona.
Cortocircuitando el rotor mediante una resistencia y una inductancia en serie se
consigue que el punto de funcionamiento opere a mayores velocidades y se reduce el
consumo de potencia reactiva de la máquina. Después de un tiempo el circuito de protección
es desconectado para seguir con la operación normal.
Figura 21: Protección Crowbar
2.5.2.4 Balance de potencias
Los convertidores son necesarios para que la energía fluya en ambas direcciones ya
que estos generadores necesitan tanto de potencia reactiva como potencia activa para
funcionar, ya que el rotor puede recibir o entregar potencia a la red, además la potencia
reactiva, es necesaria para crear su campo magnético. El convertidor conectado al rotor debe
operar en ambos sentidos, justificación por la que se deben emplear convertidores
bidireccionales (back-to-back). [4]
Una de las características propias del sistema DFIG es su balance de potencias. Tras
realizar un sencillo análisis de las expresiones anteriores se llega a la conclusión de que
cuando el generador actúa a velocidades inferiores a la nominal (s > 0) la potencia del rotor
tendrá signo contrario a la potencia activa y, por tanto, el rotor absorberá energía del
convertidor. Cuando el generador actúe a velocidades superiores a la de sincronismo el rotor
entregará energía y la potencia global del generador será la generada por el estator más la
generada por el rotor.
La potencia activa mecánica de la turbina, es proporcional al par mecánico y a la
velocidad del rotor:
𝑃𝑚 = 𝑇𝑚 · 𝜔𝑚
( 26 )
La potencia activa proveniente del estator es proporcional al par electromagnético y a
la velocidad de sincronismo:
𝑃𝑠 = 𝑇𝑒 · 𝜔𝑠
30
( 27 )
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
2. Memoria
Despreciando las pérdidas del generador se obtiene que:
𝑇𝑚 = 𝑇𝑒
𝑃𝑚 = 𝑃𝑠 + 𝑃𝑟
( 28 )
El par mecánico es igual al par electromagnético. La potencia activa mecánica es la
suma de la potencia activa del estator y la potencia activa del rotor. Al despejar la potencia
del rotor de (1.10) se deduce que la diferencia entre la potencia mecánica total y la potencia
del estator dan lugar a la potencia del rotor. Al sustituir las potencias por sus ecuaciones, la
potencia del rotor resulta:
𝑃𝑟 = 𝑇𝑚 · 𝜔𝑚 − 𝑇𝑒 · 𝜔𝑠
( 29 )
Finalmente se concluye que la potencia del rotor es proporcional a la velocidad de
deslizamiento y a la potencia del estator. La ecuación anterior se reescribe como:
𝑃𝑟 = −𝑠 · 𝑃𝑠
( 30 )
Como se ha demostrado, por el convertidor del rotor circula únicamente una pequeña
proporción de la potencia total de la máquina. Esta depende del deslizamiento al que la
máquina esté funcionando. Esta es la razón de que este tipo de generadores sean adecuados
para aplicaciones donde el rango de variación de la velocidad sea pequeño, como es el caso
de los aerogeneradores.
Figura 22: DFIG con balance de potencias en régimen subsíncrono y supersíncrono
31
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
2. Memoria
2.5.3 Transformada de Park
La transformación de Park o D-Q convierte las componentes ‘abc’ del sistema trifásico
a otro sistema de referencia ‘dq0’. El objetivo de la transformación consiste en convertir los
valores trifásicos ‘abc’, variables senoidalmente en el tiempo, a valores constantes ‘dq0’, en
régimen permanente.
La ventaja es que se simplifica el modelo matemático de la máquina. Las variables abc
son senoidales en el tiempo, sin embargo las variables dq0 son constantes. La componente
d es la componente de directa, q es la componente en cuadratura y 0 es la componente de
secuencia cero.
Para facilitar su comprensión, en la Figura 23 se puede visualizar los ejes de un sistema
de coordenadas ‘abc’ y ‘dq’ en caso de considerar un sistema trifásico equilibrado.
Figura 23: Sistemas de referencia ‘dq’ y ‘abc’ de secuencia directa
La transformación desde el eje de coordenadas ‘abc’ hacia el sistema de coordenadas
‘dq0’ se logra mediante la siguiente matriz:
2𝜋
2𝜋
)
𝑐𝑜𝑠 (𝜃 + )
3
3
𝑣𝑑
𝑣𝑎
2𝜋
2𝜋
2
[ 𝑣𝑞 ] = √ · −𝑠𝑖𝑛(𝜃) −𝑠𝑖𝑛 (𝜃 − ) −𝑠𝑖𝑛 (𝜃 + ) · [𝑣𝑏 ]
3
3
3
𝑣0
𝑣𝑐
1
1
1
[ √2
]
√2
√2
𝑐𝑜𝑠(𝜃)
𝑐𝑜𝑠 (𝜃 −
32
( 31 )
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
2. Memoria
2.5.4 Ecuaciones en régimen dinámico del generador DFIG
o Ecuaciones de tensión:
𝑑
𝜑 + 𝜔𝑠 · 𝜑𝑑𝑠
𝑑𝑡 𝑞𝑠
𝑑
𝑉𝑑𝑠 = 𝑅𝑠 · 𝑖𝑑𝑠 + 𝜑𝑑𝑠 − 𝜔𝑠 · 𝜑𝑞𝑠
𝑑𝑡
𝑑
𝑉𝑞𝑟 = 𝑅𝑟 · 𝑖𝑞𝑟 + 𝜑𝑞𝑟 + 𝜔𝑟 · 𝜑𝑑𝑟
𝑑𝑡
𝑑
𝑉𝑑𝑟 = 𝑅𝑟 · 𝑖𝑑𝑟 + 𝜑𝑑𝑟 − 𝜔𝑟 · 𝜑𝑞𝑟
𝑑𝑡
𝑉𝑞𝑠 = 𝑅𝑠 · 𝑖𝑞𝑠 +
( 32 )
( 33 )
( 34)
( 35 )
donde 𝜔𝑠 es la velocidad síncrona y 𝜔𝑟 es la diferencia entre la velocidad síncrona
y la velocidad mecánica de giro del rotor 𝜔𝑟 = 𝜔𝑠 − 𝜔𝑚 .
o Ecuaciones de flujo:
𝜑𝑞𝑠 = 𝐿𝑠 · 𝑖𝑞𝑠 + 𝐿𝑚 · 𝑖𝑞𝑟
( 36 )
𝜑𝑑𝑠 = 𝐿𝑠 · 𝑖𝑑𝑠 + 𝐿𝑚 · 𝑖𝑑𝑟
( 37 )
𝜑𝑞𝑟 = 𝐿𝑟 · 𝑖𝑞𝑟 + 𝐿𝑚 · 𝑖𝑞𝑠
( 38 )
𝜑𝑑𝑟 = 𝐿𝑟 · 𝑖𝑑𝑟 + 𝐿𝑚 · 𝑖𝑑𝑠
( 39 )
𝐿𝑠 = 𝐿𝑙𝑠 + 𝐿𝑚
( 40 )
𝐿𝑟 = 𝐿𝑙𝑠 + 𝐿𝑚
( 41 )
donde:
o Par electromagnético:
𝑇𝑒 =
3
· 𝑃 · (𝜑𝑑𝑠 𝑖𝑞𝑠 − 𝜑𝑞𝑠 𝑖𝑑𝑠 )
2
( 42 )
o Potencia eléctrica:
3
· (𝑉𝑑𝑠 𝑖𝑑𝑠 + 𝑉𝑞𝑠 𝑖𝑞𝑠 )
2
3
𝑄𝑠 = · (𝑉𝑞𝑠 𝑖𝑑𝑠 − 𝑉𝑑𝑠 𝑖𝑞𝑠 )
2
𝑃𝑠 =
33
( 43 )
( 44 )
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
2. Memoria
Figura 24: Esquema equivalente en ejes d-q del generador de inducción doblemente
alimentado
2.6
Estudio de las perturbaciones en el aerogenerador
2.6.1 Perturbaciones mecánicas
En este apartado se estudiaran las perturbaciones mecánicas, que directamente o
indirectamente desencadenan una perturbación en la parte de generación eléctrica.
2.6.1.1 Variaciones bruscas de la velocidad del viento
Las perturbaciones debidas a cambios bruscos de la velocidad del viento o ráfagas, se
traduce a un cambio en la amplitud y el ángulo de ataque (β) de la velocidad del viento
incidente sobre los perfiles o palas. En zonas de viento superior a la nominal del
aerogenerador, la turbina es poco sensibles al efecto de las ráfagas ya que están diseñadas
para que sus perfiles entren en pérdida aerodinámica. [4]
Por otro lado, en aerogeneradores basados en el control del MPPT, el punto máximo de
potencia es calculado mediante la velocidad del viento instantánea, de modo que cuando se
produce un cambio brusco en la velocidad del viento, también se produce un cambio brusco
en las consignas de control de la máquina, dando origen a respuestas más lentas en el sistema
de control.
2.6.1.2 Perturbación debido al paso de la pala por la torre
La perturbación debido al paso de la pala por la torre o sombra de torre, se debe cuando
la pala pasa cerca de la torre, la presencia de la torre crea un cambio de presión entra esta y
la pala, generando una perturbación en el par. Este efecto depende de la orientación de la
máquina (sotavento o barlovento), de la geometría de la pala y del número de Reynols del
fluido.
34
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
2. Memoria
Esta perturbación es más acusado cuando el rotor eólico está orientado a sotavento, es
por este motivo que la mayoría de aerogeneradores esta situados a barlovento. Esta
perturbación no es importante por su magnitud sino por su elevado número de ciclos al que
se ve sometido la pala a lo largo de su vida útil.
2.6.2 Perturbaciones eléctricas
Las perturbaciones eléctricas pueden ser debidas a cambios en la forma de onda,
magnitud o frecuencia en un instante de tiempo. Una de las perturbaciones eléctricas más
importantes es el hueco de tensión. Cabe notar que su efecto no es tan peligroso como una
interrupción (pérdida total de la tensión), sin embargo se producen más huecos que
interrupciones. En consecuencia se estudiara en el presente proyecto los efectos de los
huecos de tensión.
2.6.2.1 Huecos de tensión
2.6.2.1.1 Introducción
El hueco de tensión es una reducción brusca de la tensión de alimentación a un valor
situado entre el 90 y el 1% de la tensión declarada, seguida del restablecimiento de la tensión
después de un corto período de tiempo. Por convenio, un hueco de tensión tiene una duración
de entre 10 ms (medio ciclo a 50 Hz) y 1 minuto. Los huecos de tensión se pueden dar en
una, dos o tres fases. La Asociación Española de Normalización y Certificación (AENOR)
en la norma UNE-EN 50160, define que:
“Un hueco de tensión es una disminución brusca de la tensión de alimentación a un
valor situado entre el 90% y el 1% de la tensión declarada Uc, seguida del restablecimiento
de la tensión después de un corto lapso de tiempo. Por convenio, un hueco de tensión dura
de 10 ms a 1 min. La profundidad de un hueco de tensión es definida como la diferencia
entre la tensión eficaz mínima durante el hueco de tensión y la tensión declarada. Las
variaciones de tensión que no reducen la tensión de alimentación a un valor inferior al 90%
de la tensión declarada Uc no son consideradas como huecos de tensión.
2.6.2.1.2 Causantes de los huecos de tensión
La norma UNE-EN 50160 indica que los huecos de tensión son generalmente debidos
a faltas (cortocircuitos) producidos en la red eléctrica.
Según M. H. J. Bollen las causas que originan los huecos de tensión se pueden agrupar
en dos grandes categorías:
Faltas (cortocircuitos) producidas en la red: debidas a descargas atmosféricas
o a contactos accidentales de los animales con las líneas eléctricas, entre otros.
Las faltas son los huecos más severos que se pueden producir. Además, son las
causas más comunes que provocan huecos de tensión en los terminales de las
instalaciones eólicas de producción de energía eléctrica
Sobrecargas: debidas básicamente al arranque de grandes cargas (potencia
elevada) como motores o a la conexión a la red de transformadores.
35
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
2. Memoria
Al producirse un hueco de tensión en la red, un efecto típico sobre las cargas
conectadas a la misma es la aparición de picos de intensidad tras la recuperación de la
tensión, esto conlleva a apariciones de grandes picos de par en las máquinas de inducción,
oscilaciones en el eje mecánico de giro y posibles daños en los equipos conectados a dicho
eje.
Por otro lado, cuando aparecen estas sobreintensidades a consecuencia de los huecos
de tensión, actúan las protecciones desconectando las cargas de la red. De este modo se
protegen los componentes más sensibles a las perturbaciones eléctricas, como los
convertidores electrónicos.
2.6.2.1.3 Tipologías de huecos de tensión
Los huecos de tensión se pueden clasificar en función del tipo de falta (trifásica, fasetierra, fase-fase, y fase-fase-tierra) y en qué punto de conexión común (PCC) se comete la
falta, en la figura 25 muestra un sistema eléctrico donde se muestra 3 puntos de conexión
común, a distinto nivel de tensión debido a los transformadores con conexión triangulo (D)
– estrella (y), La carga se corresponde al generador doblemente alimentado. [3]
Figura 25: Sistema eléctrico con tres niveles de tensión para la clasificación de los
huecos de tensión [3]
Los huecos de tensión se clasifican en 7 tipologías dependiendo en que PCC se comete
la falta, tipo de falta, y la transmisión de los huecos a los otros niveles de tensión, los huecos
quedan clasificados en la siguiente tabla:
Tabla 1: Clasificación de los huecos de tensión en función de la falta y de su
localización. [3]
36
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
2. Memoria
Finalmente los huecos se pueden dividir en dos categorías:
Huecos simétricos: son debidos a faltas trifásicas, las cuales producen la misma
reducción de tensión en las tres fases y cuyo desfase es de 120º. El único hueco
simétrico es el A.
Huecos asimétricos: son debidos a las faltas monofásicas o bifásicas, las cuales
no producen la misma reducción de tensión en las tres fases y cuyo desfase no
tiene por qué ser 120º. Los huecos asimétricos son: B, C, D, E, F y G.
37
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
2. Memoria
Figura 26: Modelo de huecos de tensión en variable de fase y diagrama fasorial. [3]
38
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
2. Memoria
Figura 27: Modelo de huecos de tensión en variables temporales y representación
temporal. [3]
39
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
2. Memoria
Tabla 2: Componentes simétricas de los huecos de tensión abruptos [3]
Los huecos de tipo B y E son los únicos tipos de huecos que tienen componente
homopolar. Al considerar la máquina conectada en estrella con neutro aislado,
significa que por el neutro no circulara corriente, por lo que la suma de las tres
corrientes de fase es cero en todo momento, en consecuencia no existe corriente
homopolar en las corrientes. Por este motivo no se estudiaran los tipos de huecos B
y E.
40
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
2. Memoria
2.7
Modelado del sistema DFIG en Simulink®
2.7.1 Modelo aerogenerador
Como se explicó con anterioridad un aerogenerador viene expresado por la siguiente
expresión matemática:
1
𝑃𝑎𝑒𝑟𝑜 = 𝑐𝑝 (𝛽, 𝜆) · · 𝜌 · 𝑆 · 𝑣1 3
2
En este trabajo se modelizará un aerogenerador
características:
Características
( 45 )
tripala con las siguientes
Valor
Potencia nominal
1,5 MW
Radio del rotor eólico
36,5 m
Velocidad de giro máxima
20 min-1
Velocidad de giro mínima
13 min-1
Velocidad nominal de viento
11 m/s
Relación de transmisión del tren de engranajes
1:90
Tabla 3: Características de la turbina eólica a estudiar
Por otro lado los coeficientes que permite calcular el coeficiente de potencia en
función, se ha obtenido de J.G. Slotweg [7]. Estos coeficientes se muestran a continuación:
c1
c2
c3
c4
c5
c6
c7
c8
c9
0.73
151
0.58
0.002
2.14
13.2
18.4
-0.02
-0.003
Tabla 4: Constantes para el cálculo del coeficiente de potencia de la turbina [7].
Figura 28: Modelo de la turbina de viento en Simulink
41
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
2. Memoria
2.7.2 Curva de potencia
Una vez obtenido el modelo de la turbina de viento en Simulink, se realizara una serie
de simulaciones variando la velocidad de viento y la velocidad de rotación del generador,
con el fin de obtener la curva Potencia-Velocidad.
Para ello, se ha utilizado el modelo de la turbina anterior (mpp.mdl) y el archivo .m
siguiente (mppt.m):
w=[0:0.1:30]; %vector de velocidades de la turbina
wind=[4:25]; %vector de velocidades de viento
Pot=zeros(13,1);
Par=zeros(13,1);
Potmax=zeros(13,1);
Torqueref=zeros(13,1);
for i=1:length(wind)
v=wind(i);
for j=1:length(w)
wt=w(j);
sim('mpp.mdl')
Pot(i,j)=Potencia(1,1);
Par(i,j)=Torque(1,1);
end
k=max(Pot(i,:));
f(i)=find(Pot(i,:)==k);
Torqueref(i)=Par(i,f(i));
Potmax(i)=Pot(i,f(i));
wr(i)=w(f(i));
end
figure(1)
plot(w,Pot(1,:),w,Pot(2,:),w,Pot(3,:),w,Pot(4,:),w,Pot(5,:),w,Pot(6,:),w,
Pot(7,:),w,Pot(8,:),w,Pot(9,:),w,Pot(10,:),w,Pot(11,:),w,Pot(12,:),w,Pot(
13,:)); legend('4 m/s','5 m/s','6 m/s','7 m/s','8 m/s','9 m/s','10
m/s','11 m/s','12 m/s','13 m/s','14 m/s','15 m/s','16 m/s','17
m/s','location','NorthEastOutside');grid on; hold on
Este archivo .m arrancara el modelo en Simulink primero tomara el primer valor de
velocidad de viento, luego ira variando la velocidad del generador desde 0 min-1 hasta 2500
min-1, guardará los valores de potencia obtenidos y tomara otro valor de velocidad de viento
y volverá a variar las velocidades del generador.
42
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
2. Memoria
Por ultimo una vez acabado el bucle, se realizará un plot de los resultados obtenidos:
Figura 29: Curva Potencia-Velocidad y seguimiento del MPPT de la turbina a estudiar
Teniendo en cuenta las velocidades de rotación máximas y mínimas de la turbina (20
y 13 min-1) y la potencia nominal de la turbina (1,5 MW) se definen las tres zonas de
operación de la turbina:
o Zona A: Para velocidades de viento comprendidas entre 0-5 m/s el
aerogenerador no extraerá potencia.
o Zona B: Entre velocidades de viento comprendidas entre 5-11 m/s el
aerogenerador extraerá potencia en función de la velocidad del viento y la
velocidad de rotación de la máquina. En esta zona entra en juego el control del
generador.
o Zona C: Para velocidades de viento superiores a 11 m/s, la potencia extraída
será constante, limitada a su valor nominal (1,5 MW) debido al control de
ángulo de paso o Pitch Control.
Por otra parte se ha trazado el seguimiento del máximo punto de potencia (línea roja
gruesa). Cabe destacar que para velocidades de viento de 5 y 6 m/s se ha optado por escoger
el punto de potencia óptima debido a que el punto de máxima potencia queda fuera del rango
de velocidad de la turbina.
De la misma manera se puede obtener la curva de Potencia-Velocidad del generador o
Par-Velocidad del generador, debido que existe una relación de transmisión 1:90, para
adaptar la velocidad de giro de la turbina a la del generador.
43
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
2. Memoria
Como se puede observar en la imagen 30 para cada punto de máxima potencia le
pertenece un par, que el control del generador deberá de imponer para extraer la máxima
potencia.
Figura 30: Relación entre curva Potencia-Velocidad y Par-Velocidad
Estos resultados se guardarán en una tabla, debido a que más adelante, cuando
hablemos del control de la máquina se necesitara un par de referencia para que la maquina
opere a máxima potencia.
Velocidad viento
4 m/s
5 m/s
6 m/s
7 m/s
8 m/s
9 m/s
10 m/s
=< 11 m/s
Par de referencia (MPPT)
0
375,70
1522,0
2900,0
4253,76
5392,77
6626,0
8200,0
Velocidad turbina [min-1]
0
13,45
13,72
14,16
14,72
16,22
18,11
19,45
Velocidad generador [min-1]
0
1210
1235
1275
1325
1460
1630
1750
Deslizamiento
1
0,193
0,176
0,150
0,116
0,002
-0,008
-0,1666
Tabla 5: Tabla de valores de referencia obtenidas del MPPT
Para valores de velocidades intermedias se ha optado por hacer una extrapolación, con
el bloque de la librería de Simulink: Lookup Table.
44
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
2. Memoria
2.7.3 Modelo del generador DFIG
El generador de inducción doblemente alimentado (DFIG) es una máquina de
inducción de velocidad variable, muy utilizada en generadores eólicos.
Se trata de una máquina de inducción de rotor bobinado cuya principal diferencia
respecto a la máquina de inducción clásica consiste en que el rotor está conectado a la red
a través de un convertidor electrónico back-to-back.
Este convertidor AC/DC/AC consta normalmente de un convertidor lado rotor y
otro lado red, ligados por un condensador que actúa como fuente de continua , Gracias
a este convertidor, la máquina puede operar en un rango mayor de velocidad de giro
del rotor que la máquina clásica, el rango de velocidades abarca tanto la velocidad
subsíncrona, síncrona, como supersíncrona, Es por ello que el DFIG se adapta mejor a la
variabilidad intrínseca del viento.
En este trabajo se estudiara una máquina de inducción con rotor devanado de 1,5MW
con las características siguientes:
Características de la máquina de inducción con rotor devanado:
Características
Valor
Potencia nominal
1,5 MW
Tensión nominal
690 V
Corriente nominal estator
1068,2 A
Corriente nominal rotor
1125,6 A
Frecuencia nominal
50 Hz
Pares de polos
2
Rango de velocidades
1200-1750 min-1
Resistencia del estator
2,650 mΩ
Resistencia del rotor
2,630 mΩ
Inductancia de dispersión del estator
0,168 mH
Inductancia de dispersión del rotor
0,133 mH
Inductancia magnetizante
5,475 mH
Constante de inercia
Tabla 6: Características del generador de inducción doblemente alimentado a
estudiar
El rotor de la máquina estará alimentado por un convertidor back-to-back, impulsado por
IGBT’s como se muestra en la imagen 30.
El convertidor empleado es el modelo IGBT, convertidor de corriente alterna AC/DC/AC,
basado en Modulación por ancho de pulsos (PWM), Se divide en dos componentes:
Convertidor conectado al rotor (RSC)
Convertidor conectado a la red (GSC)
45
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
2. Memoria
El convertidor conectado a la red, trabaja siempre a la frecuencia de la misma, Mientras
que el convertidor conectado al rotor, trabaja a frecuencia variable, dependiendo del punto
de operación de la turbina.
Normalmente se conecta un condensador entre los terminales DC del convertidor
bidireccional, el cual actúa como fuente de tensión en continua, Otra función es la de
convertir la corriente alterna que proviene de la red (o del rotor) a continua, donde será
almacenada por el condensador durante un periodo determinado, posteriormente ésta se
convierte en alterna para ser inyectada al rotor o a la red.
El estator de la máquina y el convertidor están conectados a un transformador de triple
devanado debido a que la máquina y el convertidor están alimentados a tensiones distintas.
Figura 31: Modelo completo en Simulink
1.
2.
3.
4.
5.
6.
7.
8.
Red trifásica de36 kV, 50Hz.
Transformador: Triple devanado, Tensiones: 36kV / 690 V / 120 V,
Turbina de viento.
Máquina de inducción de rotor devanado.
Convertidor Back-to-Back.
Filtro de red.
Control GSC (Grid side converter).
Control RSC (Rotor side converter).
46
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
2. Memoria
2.7.4 Modelo de control lado rotor (RSC)
Para realizar el control se ha basado en el capítulo 8 del libro Power Conversion and
Control of Wind Energy Systems [5].
El control del convertidor del lado del rotor, tiene como objetivo controlar el par del
generador y la potencia reactiva del estator de la máquina. Para ello, actúa sobre los
devanados del rotor aplicando la tensión necesaria en cada momento.
La componente de eje cuadratura de la corriente del rotor (Irq) representa la
corriente de excitación y permite controlar la potencia reactiva del generador,
la cual generalmente se anula,
La componente de eje en directo de la corriente del rotor (Idr) representa la
corriente de par y permite controlar el par electromagnético con el fin de seguir
el punto de máxima potencia de la turbina eólica
Por este motivo, tenemos que reescribir las ecuaciones del par electromagnético y
potencia reactiva en función de la corrientes rotóricas,
Como se ha observado en el apartado 2,5,4 el par electromagnético puede ser
expresado por la siguiente expresión matemática:
3
𝑇𝑒 = 𝑃(𝜑𝑑𝑠 𝑖𝑞𝑠 − 𝜑𝑞𝑠 𝑖𝑑𝑠 )
2
( 46 )
donde el flujo del estator queda definido por:
𝜑𝑑𝑠 = 𝐿𝑠 𝑖𝑑𝑠 + 𝐿𝑚 𝑖𝑑𝑟
( 47 )
𝜑𝑞𝑠 = 𝐿𝑠 𝑖𝑞𝑠 + 𝐿𝑚 𝑖𝑞𝑟
( 48 )
despejando las intensidades del estator de la ecuación anterior:
𝑖𝑑𝑠 =
𝜑𝑑𝑠 − 𝐿𝑚 𝑖𝑑𝑟
𝐿𝑠
( 49 )
𝑖𝑞𝑠 =
𝜑𝑞𝑠 − 𝐿𝑚 𝑖𝑞𝑟
𝐿𝑠
( 50 )
sustituyendo las ecuaciones [49] y [50] en la ecuación [46] queda que :
𝑇𝑒 =
3𝑃𝐿𝑚
· (−𝑖𝑞𝑟 𝜑𝑑𝑠 + 𝑖𝑑𝑟 𝜑𝑞𝑠 )
2𝐿𝑠
47
( 50 )
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
2. Memoria
La tensión en el estator en estado estacionario puede ser expresada de la siguiente
manera:
𝑣⃗𝑠 = 𝑅𝑠 𝑖⃗𝑠 + 𝑗𝜔𝑠 𝜑
⃗⃗𝑠
( 51 )
𝑣𝑑𝑠 + 𝑗𝑣𝑞𝑠 = 𝑅𝑠 (𝑖𝑑𝑠 + 𝑖𝑞𝑠 ) + 𝑗𝜔𝑠 (𝜑𝑑𝑠 + 𝜑𝑞𝑠 )
( 52 )
en ejes d-q es:
aislando los flujos de la expresión anterior tenemos:
𝜑𝑑𝑠 =
𝑣𝑞𝑠 − 𝑅𝑠 𝑖𝑞𝑠
𝜔𝑠
𝜑𝑞𝑠 = −
𝑣𝑑𝑠 − 𝑅𝑠 𝑖𝑑𝑠
𝜔𝑠
( 53 )
( 54 )
sustituyendo las ecuaciones [53] y [54] en la ecuación [50] tenemos que:
𝑇𝑒 =
𝑣𝑞𝑠 − 𝑅𝑠 𝑖𝑞𝑠
3𝑃𝐿𝑚
𝑣𝑑𝑠 − 𝑅𝑠 𝑖𝑑𝑠
· [−𝑖𝑞𝑟 (
) + 𝑖𝑑𝑟 (−
)]
2𝐿𝑠
𝜔𝑠
𝜔𝑠
𝑣𝑞𝑠 = 0
𝑇𝑒 =
3𝑃𝐿𝑚
· (𝑅𝑠 𝑖𝑞𝑠 𝑖𝑞𝑟 + 𝑅𝑠 𝑖𝑑𝑠 𝑖𝑑𝑟 −𝑖𝑑𝑟 𝑣𝑑𝑠 )
2𝐿𝑠 𝜔𝑠
( 55 )
( 56 )
( 57 )
despreciando resistencia estatórica 𝑅𝑠 por su bajo valor, el par electromagnético queda
expresado en función de la intensidad rotórica:
𝑇𝑒 = −
3𝑃𝐿𝑚
𝑖 𝑣
2𝐿𝑠 𝜔𝑠 𝑑𝑟 𝑑𝑠
( 58 )
por otro lado, la potencia activa y reactiva, como ya se vio en el apartado 2.5.4, puede
ser calculada por:
3
· (𝑉𝑑𝑠 𝑖𝑑𝑠 + 𝑉𝑞𝑠 𝑖𝑞𝑠 )
2
3
𝑄𝑠 = · (𝑉𝑞𝑠 𝑖𝑑𝑠 − 𝑉𝑑𝑠 𝑖𝑞𝑠 )
2
𝑃𝑠 =
48
( 59 )
( 60 )
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
2. Memoria
𝑣𝑞𝑠
sustituyendo las ecuaciones [49] y [50] en [59] y [60] teniendo en cuenta que
=0 :
3
𝜑𝑑𝑠 − 𝐿𝑚 𝑖𝑑𝑟
· (𝑣𝑑𝑠
)
2
𝐿𝑠
( 61 )
𝜑𝑞𝑠 − 𝐿𝑚 𝑖𝑞𝑟
3
𝑄𝑠 = − · 𝑣𝑑𝑠
2
𝐿𝑠
( 62 )
𝑃𝑠 =
y sustituyendo los flujos estatóricas en la ecuación anterior :
3𝑣𝑑𝑠 𝐿𝑚
𝑃𝑠 = − (
) 𝑖𝑑𝑟
2𝐿𝑠
( 63 )
3𝑣𝑑𝑠 2 + 3𝐿𝑚 𝑖𝑞𝑟 𝑣𝑑𝑠
𝑄𝑠 =
2𝐿𝑠 𝜔𝑠
( 64 )
aislando las intensidades rotóricas:
𝑖𝑑𝑟 = −
𝑖𝑞𝑟 =
2𝐿𝑠
𝑃
3𝑣𝑑𝑠 𝐿𝑚 𝑠
2𝐿𝑠
𝑣𝑑𝑠
𝑄𝑠 −
3𝑣𝑑𝑠 𝐿𝑚
𝜔𝑠 𝐿𝑠
( 65 )
( 66 )
Podemos ver que podemos controlar la potencia activa o el par electromagnético de
la máquina regulando la corriente del rotor 𝑖𝑑𝑟 , y la potencia reactiva regulando la corriente
del rotor 𝑖𝑞𝑟 .
Figura 32: Modelo del control RSC [5]
49
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
2. Memoria
En la figura anterior se puede observar el principio de funcionamiento del control. Se
mide el ángulo de posición del rotor θr mediante un encoder ubicado en su eje. El ángulo de
deslizamiento para realizar la transformada de las corrientes del rotor en ejes d-q se obtiene
mediante: θslip= θs- θr. Los bloques de transformación abc/dq permite transformar las
corrientes en abc a ejes d-q estacionarias y viceversa. Se hace una medición del par
electromagnético de la máquina y se compara con el par de referencia proporcionado por el
MPPT, lo mismo ocurre con la potencia reactiva se mide y se compara con el valor de
referencia, luego se calcula las corrientes de estos valores de referencia y se comparan con
las corrientes medidas en el rotor, en la salida del controlador PI tenemos las tensiones del
rotor de referencia que serán transformadas en tres fases de referencia ‘abc’ que se utilizarán
como señal de referencia modulación en el PWM. El bloque PWM genera las señales de
activación periódica para el convertidor del lado del rotor.
Figura 33: Modelo del control RSC en Simulink
2.7.5 Modelo del Pitch control
Al aumentar la velocidad del viento aumenta la energía capturada por la turbina, Si es
demasiado alta el controlador hace girar la palas, modificando el ángulo, Las palas se desvían
de la dirección del viento.
La figura 34 ilustra el diagrama de bloques del sistema empleado, Se compara la
velocidad actual del rotor (wg), con la velocidad máxima que alcanza la turbina cuando
captura la mayor energía posible, en el punto máxima que alcanza ’ W. Ref ’, a partir de
entonces la potencia de salida de la turbina no puede aumentar. El valor del ángulo es
proporcional a la desviación de velocidad de la turbina.
Figura 34: Control Pitch Angle en Simulink
50
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
2. Memoria
Tarragona, a 6 de Septiembre de 2013.
EL TÉCNICO:
José Manuel Torres Olmedo
51
Análisis de los efectos ante perturbaciones eléctricas y
mecánicas en el generador de inducción de doble
alimentación (DFIG),
3. RESULTADOS DE LAS SIMULACIONES
TITULACIÓN: Grado Ingeniería Eléctrica
AUTOR: José Manuel Torres Olmedo
DIRECTOR: José Antonio Barrado Rodrigo
FECHA: 09/2013
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
3. Resultados
ÍNDICE RESULTADOS DE SIMULACION
3 Resultados de simulación del modelo DFIG. ......54
3.1
Funcionamiento en condiciones nominales ............................................55
3.2
Balances de potencia.................................................................................57
3.3
Pitch control ..............................................................................................59
3.4 Resultado ante perturbaciones mecánicas .............................................61
3.4.1
Cambio brusco de la velocidad del viento en forma de rampa, .......61
3.4.2
Cambio brusco de la velocidad del viento en forma de escalón ......63
3.4.3
Efecto de la sombra de la torre sobre las aspas ................................65
3.5 Resultado ante perturbaciones eléctricas ...............................................67
3.5.1
DFIG sometido a huecos de tensión tipo A, C, D, F y G profundidad
del 10 % .....................................................................................................................67
3.5.2
DFIG sometido a huecos de tensión tipo A, C, D, F y G profundidad
del 50 % .....................................................................................................................71
3.5.4
DFIG sometido a huecos de tensión A, C, D, F y G profundidad del
90 % ...........................................................................................................................75
3.6
Respuesta ante protección Crowbar .......................................................79
3.7
Conclusiones ..............................................................................................81
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
3. Resultados
3
Resultados de simulación del modelo DFIG
A continuación se realizara una serie de simulaciones del sistema explicado en el
apartado anterior bajo distintas condiciones, para observar y comprender el funcionamiento
y las distintas respuestas de este sistema de generación eólica, Estas simulaciones darán a
lugar a los siguientes 5 apartados:
1) En condiciones nominales: Se realizara una simulación del DFIG a condiciones
nominales de viento, es decir, sin cambio brusco de velocidades ni
perturbaciones.
2) Balances de potencias: Se someterá al generador a dos rangos distintos de
velocidades para poder destacar (8 y 12 m/s), de esta forma se podrá observar
el balance de potencias característico de este sistema.
3) Pitch control: Se someterá al aerogenerador a una velocidad creciente desde 5
m/s (velocidad de arranque) hasta 20 m/s (velocidad de corte), de tal manera
que se podrá observar cómo se limita la potencia a la potencia máxima del
aerogenerador.
4) Ante perturbaciones mecánicas: Se someterá al sistema a las siguientes
perturbaciones mecánicas:
a) Cambio brusco de la velocidad del viento en forma de rampa.
b) Cambio brusco de la velocidad del viento en forma de escalón.
c) Efecto de la sombra de la torre sobre las aspas.
5) Ante perturbaciones eléctricas: Se someterá al sistema a huecos de tensión en
distintas tipologías y profundidades, de esta forma se podrá observar cómo
responde el sistema.
54
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
3. Resultados
3.1
Funcionamiento en condiciones nominales
En este apartado, se ha realizado una simulación del sistema bajo condiciones
nominales, es decir sin ninguna perturbación ya sea eléctrica o mecánica, Las condiciones
a la que se ha sometido el sistema son las siguientes:
Velocidad viento: 9-11 m/s con variaciones lentas
Potencia reactiva de referencia Qs= 0
Tiempo de simulación = 10 s
Observaciones:
En la siguiente imagen se puede ver las respuestas en el siguiente orden:
1)
2)
3)
4)
5)
6)
Velocidad del viento [m/s]
Velocidad del generador [min-1]
Potencia activa (rojo), potencia reactiva (azul) [W]
Par de referencia (azul) y par real (rojo) [N·m]
Potencia reactiva referencia (azul) y potencia reactiva real (rojo) [VAr]
Intensidad rotor [A]
Como puede apreciarse en las siguientes imágenes, se observa variaciones de
velocidad del generador en función de la velocidad del viento, y como la máquina
genera potencia activa a velocidad variable como se comentó anteriormente en la
memoria del presente proyecto. Por otro lado se observa que la potencia reactiva
generada por la máquina se mantiene constante a cero.
También se puede observar una comparativa entre el par real de la máquina y
el par de referencia con el propósito de observar si el control de la máquina
cumple con los valores de referencia. Como puede observarse el par de referencia
(línea azul), va variando respecto al tiempo, esto es debido a que la velocidad del
viento también varía, de tal modo que para cada valor de velocidad del viento se
calcula un par de referencia para que la máquina opere a máxima velocidad
(MPPT). Puede verse como el par real sigue los valores de la par referencia en
todo momento, independientemente de que se produzcan cambios de velocidad
del viento o del par de referencia, con lo cual el control de la máquina funciona
correctamente. De la misma forma ocurre con la potencia reactiva generada por
la máquina.
Referente a las corrientes del rotor se observa que a medida que aumenta la
velocidad de la máquina aumenta la frecuencia de estas, y que aumentan en
magnitud cuando la máquina extrae mayor potencia.
55
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
Intensidad rotor [A]
Potencia reactiva
[W]
Par [Nm]
Potencia [W]
Velocidad [min-1]
Velocidad viento [ms]
3. Resultados
Figura 35: Comportamiento dinámico del generador doblemente alimentado sometido variaciones
normales de viento.
56
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
3. Resultados
3.2
Balances de potencia
En este apartado, se ha realizado una simulación del sistema bajo un cambio brusco
de velocidad de viento (de 8 m/s a 10 m/s), de tal forma que la máquina operará en régimen
subsíncrono para velocidad de viento igual a 8 m/s y pasara a operar a régimen
supersíncrono a velocidad de viento igual a 10 m/s, Las condiciones a la que se ha sometido
el sistema son las siguientes:
Velocidad viento: 8-10 m/s con variación brusca en t=2 s
Potencia reactiva de referencia Qs= 0
Tiempo de simulación = 4 s
Observaciones:
En la siguiente imagen se puede ver las respuestas en el siguiente orden:
1)
2)
3)
4)
5)
Velocidad del viento [m/s]
Velocidad del generador [min-1]
Potencia activa estator (rojo), potencia reactiva estator (azul) [W]
Potencia activa rotor (rojo), potencia reactiva rotor (azul) [W]
Intensidad rotor [A]
Como se puede ver en la siguiente imagen la simulación comienza con una
velocidad de viento de 8 m/s, con lo cual, el generador opera a una velocidad
subsíncrona (1325 min-1), En t=2 s la velocidad del viento aumenta hasta los 10
m/s de forma brusca, donde el generador operara a una velocidad supersíncrona
(1625 min-1).
A lo que potencia en el estator se refiere se puede observar como la potencia
reactiva cumple con la consigna de referencia (Qs= 0) e incluso cuando la
máquina sufre un cambio brusco velocidad (t=2 s),
La potencia activa aumenta en t=2,2 s, debido al aumento de la velocidad del
viento.
Se puede observar que en régimen subsíncrono la potencia del rotor es negativa
(el rotor absorbe de la red) y para régimen supersíncrono la potencia es positiva
(el rotor cede potencia hacia la red).
En la imagen de intensidades del rotor puede verse un cambio en las intensidades
debido al cambio de régimen de operación de subsíncrono a supersíncrono (t=2
s).
57
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
Intensidad rotor [A]
Potencia rotor [W]
Potencia estator [W]
Velocidad [min-1]
Velocidad viento [ms]
3. Resultados
Figura 36: Comportamiento dinámico del generador doblemente alimentado sometido a vientos
en forma escalón para analizar el balance de potencias.
58
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
3. Resultados
3.3
Pitch control
En este apartado, se ha realizado una simulación del sistema bajo un aumento de la
velocidad del viento en forma de rampa desde 5 m/s (velocidad de arranque) hasta 20 m/s,
Las condiciones a la que se ha sometido el sistema son las siguientes:
Velocidad viento: 5-20 m/s con variación lenta en forma de rampa
Potencia reactiva de referencia Qs= 0
Tiempo de simulación = 10 s
Observaciones:
En la siguiente imagen se puede ver las respuestas en el siguiente orden:
1)
2)
3)
4)
5)
Velocidad del viento [m/s]
Velocidad del generador [min-1]
Potencia activa estator (rojo), potencia reactiva estator (azul) [W]
Pitch control [ º ]
Intensidad rotor [A]
Puede verse como a medida que la velocidad del viento incrementa la velocidad
del generador incrementa hasta que el Pitch control detecta la velocidad
máxima del generador (1750 min-1), modificando el ángulo de paso de la pala
para que no supere la velocidad máxima.
De la misma forma ocurre con la potencia activa, incrementa en función del
incremento de la velocidad del viento, hasta alcanzar el valor máximo, donde
actuara el Pitch control manteniendo constante la potencia activa
independientemente de la velocidad del viento.
Referente a la potencia reactiva, cumple con el valor de la consigna de
referencia (Qs= 0).
Referente al Pitch control, el ángulo es de 0º hasta que para t=4,25 s la consigna
de control detecta la velocidad máxima de referencia, con lo que el Pitch
control aumentará el ángulo a medida que la velocidad del viento aumenta,
manteniendo constante la velocidad y la potencia de la máquina.
Las intensidades del rotor aumentan a medida que aumenta la potencia
entregada o la velocidad de la máquina, Por otro lado se puede observar en
t=2,75 s, el cambio de operación de subsíncrono a supersíncrono.
59
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
Intensidad rotor [A]
Pitch control [º]
Potencia [W]
Velocidad
[min-1]
Velocidad viento [ms]
3. Resultados
Figura 37: Comportamiento dinámico del generador doblemente alimentado sometido velocidad
en forma de rampa desde la velocidad de arranque hasta la velocidad de corte
60
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
3. Resultados
3.4
Resultado ante perturbaciones mecánicas
3.4.1 Cambio brusco de la velocidad del viento en forma de rampa,
En este apartado, se ha realizado una simulación del sistema bajo a variaciones bruscas
de la velocidad del viento en forma de rampa. Las condiciones a la que se ha sometido el
sistema son las siguientes:
Velocidad viento: Aleatoria con variaciones bruscas en forma de rampas
Potencia reactiva de referencia Qs= 0
Tiempo de simulación = 10 s
Observaciones:
En la siguiente imagen se puede ver las respuestas en el siguiente orden:
1)
2)
3)
4)
5)
6)
Velocidad del viento [m/s]
Velocidad del generador [min-1]
Potencia activa (rojo), potencia reactiva (azul) [W]
Par de referencia (azul) y par real (rojo) [N·m]
Potencia reactiva referencia (azul) y potencia reactiva real (rojo) [VAr]
Intensidad rotor [A]
Puede observarse como la máquina está sometida a cambios bruscos de
velocidad siguiendo aproximadamente la forma triangular de la velocidad del
viento, operando la máquina a velocidad subsíncrona y supersíncrona.
A lo que potencias se refiere, se puede observar como la potencia reactiva se
mantiene casi constante a cero en todo momento, mientras que la potencia
activa varía en función de la velocidad del viento.
También se observa como el par electromagnético de la máquina cumple con
el par electromagnético de referencia impuesta por el MPPT para que el
generador pueda extraer la máxima potencia.
Por otro lado la potencia reactiva también cumple con su valor de referencia
(Qs= 0).
Puede verse los cambios de subsíncrono a supersíncrono fácilmente mirando
la intensidad del rotor para tiempos iguales a t=1,6 s ; t=2,75 s ; t=4,80 s ; t=
6,6 s ; t=7,9 s y t=9,5 s . Por otro lado la magnitud de estas varía en función
de la potencia extraída.
61
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
Intensidad rotor [A]
Potencia reactiva [W]
Par ref., vs Par real
[Nm]
Potencia [W]
Velocidad [min-1]
Velocidad viento [ms]
3. Resultados
Figura 38: Comportamiento dinámico del generador doblemente alimentado sometido a cambios
bruscos de viento en forma de rampa.
62
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
3. Resultados
3.4.2 Cambio brusco de la velocidad del viento en forma de escalón,
En este apartado, se ha realizado una simulación del sistema bajo a variaciones bruscas
de la velocidad del viento en forma de. Las condiciones a la que se ha sometido el sistema
son las siguientes:
Velocidad viento: Aleatoria con variaciones bruscas en forma de escalones.
Potencia reactiva de referencia Qs= 0
Tiempo de simulación = 10 s
Observaciones:
En la siguiente imagen se puede ver las respuestas en el siguiente orden:
1)
2)
3)
4)
5)
6)
Velocidad del viento [m/s]
Velocidad del generador [min-1]
Potencia activa (rojo), potencia reactiva (azul) [W]
Par de referencia (azul) y par real (rojo) [N·m]
Potencia reactiva referencia (azul) y potencia reactiva real (rojo) [VAr]
Intensidad rotor [A]
Puede observarse los cambios bruscos en forma de escalón a la que se
ha sometido el generador desde la velocidad mínima nominal (1250 min-1)
hasta la velocidad máxima nominal (1750 min-1).
Referente a las potencias, cabe destacar que para cambios bruscos
de velocidad de viento, se puede observar picos en la potencia reactiva,
incumpliendo el valor de referencia.
Lo mismo sucede comparando el par de referencia (rojo) con el par
real (azul), cuando se somete a cambios bruscos de velocidad de viento en
forma de escalón, al control del par le resulta más difícil cumplir con el valor
de referencia.
Referente a la intensidad rotórica
no se observa ninguna
sobreintensidad que pueda afectar al convertidor o a la máquina, por otra
parte, como en los apartados anteriores puede verse el cambio de subsíncrono
a supersíncrono.
63
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
Intensidad rotor [A]
Potencia reactiva [W]
Par [Nm]
Potencia [W]
Velocidad [min-1]
Velocidad viento [ms]
3. Resultados
Figura 39: Comportamiento dinámico del generador doblemente alimentado sometido a cambio
bruscos de viento en forma de escalón.
64
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
3. Resultados
3.4.3 Efecto de la sombra de la torre sobre las aspas
En este apartado, se ha realizado una simulación sometiendo al generador a una
velocidad de viento constante, pero perturbando el par del aerogenerador, debido al paso de
la pala por la torre del aerogenerador,
Velocidad viento: Constante a 12 m/s
Perturbación del par: +/- 30% del par que experimenta la máquina
Potencia reactiva de referencia Qs= 0
Tiempo de simulación = 10 s
Observaciones:
En la siguiente imagen se puede ver las respuestas en el siguiente orden:
1)
2)
3)
4)
5)
6)
Velocidad del viento [m/s]
Velocidad del generador [min-1]
Potencia activa (rojo), potencia reactiva (azul) [W]
Par de referencia (azul) y par real (rojo) [N·m]
Potencia reactiva referencia (azul) y potencia reactiva real (rojo) [VAr]
Intensidad rotor [A]
En la velocidad de viento no se observa ninguna perturbación, se
mantiene constante, debido a que la perturbación se produce cuando las palas
pasan por delante de la torre del aerogenerador, provocando un cambio de
presión que afecta al par.
Se observa una pequeña disminución de la velocidad cada vez que la
pala pasa por delante de la torre, pero no un aumento, esto se debe por la
actuación del pitch control donde limita la velocidad.
También sufre la misma perturbación la potencia activa pero de
manera más reducida.
65
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
Intensidad rotor [A]
Par [Nm]
Potencia [W]
Velocidad [min-1]
Velocidad viento [ms]
3. Resultados
Figura 40: Comportamiento dinámico del generador doblemente alimentado sometido a el efecto
de sombra de la torre.
66
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
3. Resultados
3.5
Resultado ante perturbaciones eléctricas
3.5.1 DFIG sometido a huecos de tensión tipo A, C, D, F y G profundidad del 10 %
En este apartado se analiza el comportamiento dinámico del generador de inducción
doblemente alimentado bajo las siguientes condiciones:
Hueco de tensión abrupto tipo: A,C,D,F y G, profundidad del 10%, duración 500ms
Aerogenerador a máxima potencia (punto de trabajo más desfavorable).
Por lo que respecta a la evolución temporal del par electromagnético, potencia activa
(línea roja), potencia reactiva (línea azul), intensidad del rotor, y de la velocidad de la
máquina cabe destacar lo siguiente:
Se puede distinguir dos etapas, inicio del hueco y recuperación del hueco de tensión,
donde los efectos de las perturbaciones de maximizan.
En el caso de la velocidad del generador, en el instante donde el hueco se produce se
observa un aumento brusco pero reducido de la velocidad, seguido de una
disminución lenta, hasta que el hueco desparece, originando una bajada de velocidad
brusca pero reducida. Seguidamente el control del DFIG vuelve a imponer a la
máquina la velocidad de referencia.
Para el par electromagnético se observa un comportamiento distinto cuando el hueco
es simétrico (tipo A) o asimétrico (tipo C, D, F y G). Cuando el hueco es asimétrico
durante todo el periodo de la falta se observa un rizado en el par electromagnético,
este efecto se puede observar también en la velocidad del generador, en las potencias
y en las intensidades del rotor pero de forma menos pronunciada.
Por otro lado cabe destacar que en la tipología de hueco tipo A, dan a lugar a picos
más elevados que en las otras tipologías.
67
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
3. Resultados
Tipo A : Tensión residual 90%, Duración: 500ms
Tipo C : Tensión residual 90%, Duración: 500ms
Figura 41: Comportamiento dinámico del generador doblemente alimentado sometido a huecos de tensión
tipo A (izquierda) y tipo C (derecha)
68
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
3. Resultados
Tipo D : Tensión residual 90%, Duración: 500ms
Tipo F : Tensión residual 90%, Duración: 500ms
Figura 42: Comportamiento dinámico del generador doblemente alimentado sometido a huecos de tensión
tipo D (izquierda) y tipo F (derecha)
69
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
3. Resultados
Tipo G : Tensión residual 90%, Duración: 500ms
Figura 43: Comportamiento dinámico del generador doblemente alimentado sometido a huecos de tensión
tipo G (izquierda),
70
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
3. Resultados
3.5.2 DFIG sometido a huecos de tensión tipo A, C, D, F y G profundidad del 50 %
En este apartado se analiza el comportamiento dinámico del generador de inducción
doblemente alimentado bajo las siguientes condiciones:
Hueco de tensión abrupto tipo: A,C,D,F y G, profundidad del 50%, duración 500ms
Aerogenerador a máxima potencia (punto de trabajo más desfavorable).
Por lo que respecta a la evolución temporal del par electromagnético, potencia activa
(línea roja), potencia reactiva (línea azul), intensidad del rotor, y de la velocidad de la
máquina cabe destacar lo siguiente:
Se puede distinguir dos etapas, inicio del hueco y recuperación del hueco de tensión,
donde los efectos de las perturbaciones de maximizan.
En el caso de la velocidad del generador, igual que en el apartado anterior, en el
instante donde el hueco se produce se observa un aumento brusco de la velocidad,
seguido de una disminución lenta para huecos asimétricos , hasta que el hueco
desparece, originando una bajada de velocidad brusca pero reducida. Seguidamente
el control del DFIG vuelve a imponer a la máquina la velocidad de referencia.
Para el par electromagnético se observa un comportamiento distinto cuando el hueco
es simétrico (tipo A) o asimétrico (tipo C, D, F y G). Cuando el hueco es asimétrico
durante todo el periodo de la falta se observa un rizado en el par electromagnético,
este efecto se puede observar también en la velocidad del generador, en las potencias
y en las intensidades del rotor pero de forma menos pronunciada.
En este tipo de profundidades puede observarse como los efectos son más atenuados
en el momento de la recuperación de la falta que cuando se produce esta.
Por otro lado cabe destacar que en la tipología de hueco tipo A, dan a lugar a picos
más elevados que en las otras tipologías.
Se observa que a mayor profundidad de hueco de tensión, los efectos que estos crean
son más elevados.
Por otro lado cabe destacar que los huecos C y D producen unas perturbaciones muy
semejantes, de la misma forma que ocurre con los huecos tipo F y G.
71
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
3. Resultados
Tipo A : Tensión residual 50%, Duración: 500ms
Tipo C : Tensión residual 50%, Duración: 500ms
Figura 44: Comportamiento dinámico del generador doblemente alimentado sometido a huecos de tensión
tipo A (izquierda) y tipo C (derecha)
72
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
3. Resultados
Tipo D : Tensión residual 50%, Duración: 500ms
Tipo F : Tensión residual 50%, Duración: 500ms
Figura 45: Comportamiento dinámico del generador doblemente alimentado sometido a huecos de tensión tipo
D (izquierda) y tipo F (derecha)
73
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
3. Resultados
Tipo G : Tensión residual 50%, Duración: 500ms
Figura 46: Comportamiento dinámico del generador doblemente alimentado sometido a huecos de tensión tipo
G (izquierda),
74
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
3. Resultados
3.5.4 DFIG sometido a huecos de tensión A, C, D, F y G profundidad del 90 %
En este apartado se analiza el comportamiento dinámico del generador de inducción
doblemente alimentado bajo las siguientes condiciones:
Hueco de tensión abrupto tipo: A,C,D,F y G, profundidad del 90%, duración 500ms
Aerogenerador a máxima potencia (punto de trabajo más desfavorable).
Por lo que respecta a la evolución temporal del par electromagnético, potencia activa
(línea roja), potencia reactiva (línea azul), intensidad del rotor, y de la velocidad de la
maquina cabe destacar lo siguiente:
Se puede distinguir dos etapas, inicio del hueco y recuperación del hueco de tensión,
donde los efectos de las perturbaciones de maximizan.
En el caso de la velocidad del generador, igual que en el apartado anterior, en el
instante donde el hueco se produce se observa un aumento brusco muy de la
velocidad, seguido de una disminución lenta para huecos asimétricos , hasta que el
hueco desparece, originando una bajada de velocidad brusca pero reducida.
Seguidamente el control del DFIG vuelve a imponer a la máquina la velocidad de
referencia.
Para el par electromagnético se observa un comportamiento distinto cuando el hueco
es simétrico (tipo A) o asimétrico (tipo C, D, F y G). Cuando el hueco es asimétrico
durante todo el periodo de la falta se observa un rizado en el par electromagnético,
este efecto se puede observar también en la velocidad del generador, en las potencias
y en las intensidades del rotor pero de forma menos pronunciada.
Referente a las corrientes del rotor cabe destacar que durante el hueco de tensión,
aumenta la frecuencia de estas, debido al aumento de la velocidad de la máquina.
En este tipo de profundidades puede observarse como los efectos son más atenuados
en el momento de la recuperación de la falta que cuando se produce esta.
Por otro lado cabe destacar que en la tipología de hueco tipo A, dan a lugar a picos
más elevados que en las otras tipologías.
Se observa que a mayor profundidad de hueco de tensión, los efectos que estos crean
son más elevados.
Por otro lado cabe destacar que los huecos C y D producen unas perturbaciones muy
semejantes, de la misma forma que ocurre con los huecos tipo F y G.
75
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
3. Resultados
Tipo A : Tensión residual 10%, Duración: 500ms
Tipo C : Tensión residual 10%, Duración: 500ms
Figura 47: Comportamiento dinámico del generador doblemente alimentado sometido a huecos de tensión
tipo A (izquierda) y tipo C (derecha)
76
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
3. Resultados
Tipo D : Tensión residual 10%, Duración: 500ms
Tipo F : Tensión residual 10%, Duración: 500ms
Figura 48: Comportamiento dinámico del generador doblemente alimentado sometido a huecos de tensión
tipo D (izquierda) y tipo F (derecha)
,
77
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
3. Resultados
Tipo G : Tensión residual 10%, Duración: 500ms
Figura 49: Comportamiento dinámico del generador doblemente alimentado sometido a huecos de tensión
tipo G (izquierda),
78
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
3. Resultados
3.6
Respuesta ante protección Crowbar
En este apartado se analiza el comportamiento dinámico del generador de inducción
doblemente alimentado bajo las siguientes condiciones:
Hueco de tensión abrupto tipo: A, profundidad del 90%, duración 500ms
Aerogenerador a máxima potencia (punto de trabajo más desfavorable).
Por lo que respecta a la evolución temporal de la intensidad del rotor, intensidad del
convertidor del rotor, potencia activa (línea roja) y reactiva (línea azul) y de la velocidad de
la maquina cabe destacar lo siguiente:
Referente a la respuesta del generador de inducción doblemente alimentado sin
protección crowbar, se observa que cuando se produce la falta y cuando se despeja,
aparecen unos picos de corriente muy elevados en el rotor de la máquina, de la
misma forma que ocurre en el convertidor conectado a él. Estas sobreintensidades
pueden afectar al convertidor, para proteger a dicho convertidor, se dispone de un
dispositivo de protección crowbar.
Analizando las respuestas del generador doblemente alimentado con protección
crowbar, se observa que cuando se produce la falta y cuando se despeja, vuelve
aparecer unos picos elevados de corriente en el rotor de la máquina de la misma
forma que ocurría cuando la máquina no disponía del crowbar, pero las
sobreintensidades en el convertidor del rotor desaparecen, ya que durante la falta este
queda desconectado del rotor. En ese periodo de tiempo la máquina pasa a funcionar
como si un generador de jaula de ardilla se tratase (rotor cortocircuitado).
En lo que respecta a las potencias de la máquina, se observa que el consumo de
potencia reactiva es muy elevado cuando la máquina no dispone de la protección
crowbar, en cambio con protección crowbar, el consumo es considerablemente
menor.
79
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
3. Resultados
Sin protección Crowbar
Con protección Crowbar
Figura 50: Comparativa del comportamiento dinámico del generador doblemente alimentado con y sin
protección crowbar frente huecos de tensión tipo A, profundidad del 90%.
80
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
3. Resultados
3.7
Conclusiones
En el presente proyecto se ha realizado un estudio de los efectos ante perturbaciones
eléctricas y mecánicas sobre un generador de inducción doblemente alimentado. Una vez
finalizado se ha llegado a una serie de conclusiones:
En el sistema que se ha estudiado se combinan sistemas mecánicos con sistemas
eléctricos. Las variables que componen el sistema tiene mucha dependencia unas de
otras.
Se ha observado la importancia del seguimiento del punto máximo de potencia
(maximum power point tracking-MPPT), para aprovechar la máxima potencia
disponible del viento.
Se ha comprendido porque el DFIG, es uno de los sistemas más utilizados en la
eólica, ya que conseguimos generar a velocidad variable y controlar la potencia
reactiva generada.
Se ha comprobado la ventaja de trabajar en ejes d-q, ya que simplifican el modelo
matemático de la máquina y el control de la misma.
Se ha observado como a velocidades por encima de la nominal, actúa el Pitch control,
limitando la velocidad y con ello la potencia permitiendo la continuación de la
generación sin afectar peligrosamente al generador.
Se ha comprobado que en la máquina DFIG frente a huecos de tensión, aparecen
unos picos de corriente en el rotor de la máquina que son perjudiciales para el
convertidor del lado del rotor. También aparecen unos picos en el par
electromagnético y aceleraciones de la maquina pudiendo dañar mecánicamente esta.
Se ha comprobado que habilitando al convertidor del rotor el sistema de protección
Crowbar, logramos proteger el convertidor de una posible rotura originadas por
sobreintensidades en el rotor pero no protegemos al devanado del rotor.
Se ha comprobado el buen funcionamiento del control del DFIG, incluso ante
perturbaciones mecánicas como eléctricas.
81
Análisis de los efectos ante perturbaciones eléctricas y mecánicas en el generador de inducción de doble alimentación
3. Resultados
Tarragona, a 6 de Septiembre de 2013.
EL TÉCNICO:
José Manuel Torres Olmedo
82