x xx - Core
Anuncio

ESCUELA POLITÉCNICA NACIONAL
Facultad de Ingeniería Eléctrica
Métodos Numéricos
M É T O D O S N U M É R I C O S
OBJETIVOS GENERALES:
Desarrollar algoritmos existentes y útiles para la resolución de problemas que se presentan
en el estudio de la Ingeniería.
Propender a la implementación de ciertos algoritmos, que sirven para realizar ejercicios de
aplicación inmediata, mediante el uso de un lenguaje de programación de alto nivel,
aplicado a un micro computador.
1. INTRODUCCIÓN AL ANÁLISIS DE ERRORES
Un algoritmo es un procedimiento que describe sin ninguna ambigüedad, una sucesión finita
de pasos a realizarse en un orden específico.
Para obtener resultados confiables, es necesario imponer criterios que garanticen que el
algoritmo se mueva en un marco de estabilidad.
Así por ejemplo, un criterio que se impone a un algoritmo, es que cambios pequeños en los
datos iniciales, produzcan correspondientemente cambios pequeños en los resultados
finales, llamándose a este tipo algoritmos ESTABLES, lo que implica una acumulación de
error aceptable; mientras que si no se cumple dicho criterio se tienen algoritmos
INESTABLES, los mismos que provocarían una acumulación exagerada del error con la
consecuencia de tener respuestas fuera de la realidad.
Una forma de analizar el tipo de error, que puede provocar un algoritmo, es mediante una
función que detecte el comportamiento de dicho error, esto es a través del cálculo de la
magnitud del mismo en cada proceso numérico.
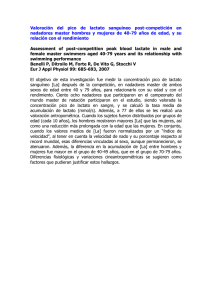
Así, suponiendo que En representa la función que determina el crecimiento del error
después de n operaciones subsecuentes, se pueden definir los siguientes modelos de
funciones de error:
a) Si: | En | Cn, donde C es una constante independiente de n.
Esta expresión señala un crecimiento LINEAL del error.
b) Si: | En | Kn, para alguna K 1
En este caso se tiene un crecimiento EXPONENCIAL del error.
Ing. Oscar E. Cerón A.
OECA _ 1
ESCUELA POLITÉCNICA NACIONAL
Facultad de Ingeniería Eléctrica
Métodos Numéricos
| En |
Crecimiento exponencial
x
x
o
x
Crecimiento lineal
o
o
x
o
o
x
o
o
n
1
2
3
4
5
6
........
Ejemplo: Evaluar la función dada por la expresión, para x = 1.0 y n = 0,1,2, …..
n1
n
2
3
x
x
x
x
x
f n ( x) n!e 1 x
.......
2
!
3
!
(
1
)!
n
n!
El razonamiento lógico es que para x , el límite de f n ( x ) para n es 0.
Así entonces, una forma de evaluar f n ( x ) viene dada por la siguiente expresión:
x
x2 x3
x n 1 x n
f n ( x ) n ( n 1)!e 1 x
.......
, donde
2!
3!
( n 1)! n!
n 1
2
3
x
x
x
x
f n1 ( x ) ( n 1)!e 1 x
. .. ... .
, por lo que
2 ! 3!
( n 1)!
f n ( x ) n f n 1 ( x ) x
n
n 1 ,2 . . .
Esta última expresión corresponde al algoritmo para evaluar f n ( x ) .
La tabla que se muestra a continuación, permite ver los valores que va tomando f n ( x )
conforme n va creciendo, mediante el algoritmo correspondiente a la expresión dada y el
valor verdadero.
Ing. Oscar E. Cerón A.
OECA _ 2
ESCUELA POLITÉCNICA NACIONAL
Facultad de Ingeniería Eléctrica
n
0
1
2
3
.
.
.
9
10
.
n(1) verdadera
1,7183
0,71828
0,43656
0,30969
.
.
.
0,10991
0,09913
.
0
Métodos Numéricos
n(1) algoritmo
1,7183
0,71830
0,43660
0,30980
.
.
.
6,7040
66,040
.
Conclusión: A medida que aumenta n, n(1) también aumenta, por lo que se trata de un
algoritmo inestable.
Además se puede deducir que el error depende exclusivamente del algoritmo
y no de las aproximaciones provocadas por la máquina de cálculo.
En general, un proceso numérico involucra errores, que dependerán de la capacidad
numérica de la máquina de cálculo, del cambio de base y del tipo de algoritmo.
Así, se tiene el llamado ERROR POR REDONDEO, originado por la capacidad numérica
de la máquina, lo que implica una representación aproximada de los números enteros o
reales verdaderos.
Además se considera el ERROR POR TRUNCAMIENTO, el mismo que es originado en
parte por el cambio de base en la representación de los números dentro de la máquina y
fundamentalmente debido al modelo del algoritmo.
Una forma de analizar este tipo de errores, es mediante la representación normalizada de los
números reales, conocida con el nombre de ARITMÉTICA REAL, esto es:
exponente
n
0.d1d2d3.............dk x 10
base decimal
mantisa
donde: 1 d1 9
0 di 9 i = 2, ......, k
Entonces, cualquier número real positivo Y puede ser normalizado en la siguiente forma:
Ing. Oscar E. Cerón A.
OECA _ 3
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
n
Y = 0.d1d2d3 ......... dkdk+1 dk+2 ......... x10
Ahora, suponiendo que Y esté representado dentro del rango numérico de la máquina,
entonces se pueden presentar los siguientes casos:
n
a)
Eliminando los dígitos dk+1 dk+2 ........, se tiene que Y Y* = 0.d1d2 ...... dkx10 ,
donde se provoca el error por truncamiento.
b)
Eliminando los dígitos dk+1 dk+2 ........, una vez que se aplique uno de los criterios
dados a continuación:
(*) Si dk+1 5 se agrega 1 a dk redondeo hacia arriba.
(**) Si dk+1 5 se retira dk+1 dk+2 ..... redondeo hacia abajo.
n
Se ve que: Y Y* = 0.12 ........ kx10 , donde se presenta error por redondeo.
Ejemplo: Representar en forma normalizada con 5 dígitos de aproximación.
= 3.14159265.......... = 0.314159265....... x10
Entonces: 0.31415x10
0.31416x10
presenta un error por truncamiento.
presenta un error por redondeo.
El tratamiento de valores numéricos, en lo relativo a una comparación, puede ser hecho en
base a los conceptos de un ERROR ABSOLUTO o de un ERROR RELATIVO.
Así, si Y* es una aproximación de Y, entonces se tiene lo siguiente:
a | = | Y - Y* | ERROR ABSOLUTO
| r | = | (Y - Y*)/Y | ERROR RELATIVO
|
Tomando la forma normalizada de los números reales, el error relativo vendrá dado por:
n
|r |
| r |
0. d1d2 ...... d k d k 1 ....10 0. d1d2 ..... d k 10
0. d1d2 ........ dk d k 1 .......10
0. d k 1d k 2 ....10
0. d1d 2 .....10
nk
n
n
n
0. d k 1d k 2 ......
10
, donde
k
0. d1d 2 ..........
De acuerdo a la última expresión y puesto que d1 0, entonces el mínimo valor del
denominador es 0.1, mientras que el numerador está acotado por 1, por lo que se tiene:
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
4
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
|r |
1
10 k
0.1
| r | 10 -k+1 error relativo por truncamiento.
Se puede demostrar también que
|r |
1
10 k 1 error relativo por redondeo.
2
n
Si dk+1 5 Y* = 0.d1d2 ...... dkx10
Sugerencia:
n
Si dk+1 5 Y* = 0.d1d2 ...... dkx10 + 10
n-k
Por otro lado, el uso continuo de la aritmética real de redondeo, lleva a la siguiente
proposición:
“ El número Y* aproxima a Y con k CIFRAS O DÍGITOS SIGNIFICATIVOS si k
-k
es un entero positivo, para lo cual: | (Y-Y*)/Y | 5x10
”
Así, una aproximación de Y* a Y con 4 cifras significativas, de las cantidades numéricas
propuestas, vendrá dado por:
Y * 1000
5 10 4 999.5 Y* 1000.5
1000
a)
Y = 1000
b)
Y = 10000
c)
Y = 5000 4997.5 Y* 5002.5
d)
Y = 9990 9985.005 Y* 9994.995
Y * 10000
5 10 4 9995 Y* 10005
10000
Para: a) y b) hay una concordancia con la definición de cifras significativas, mientras que
c) y d) puede no corresponder con la idea intuitiva de cifras significativas.
En la siguiente tabla se listan los ejemplos anteriores y otros más considerando la mínima
cota superior de |Y - Y*| denotando por max|Y - Y*|, cuando Y* concuerda con Y en cuatro
cifras significativas, esto es:
Y
max|Y-Y*|
0.1
0.00005
0.5
0.00025
100
0.05
1000
0.5
5000
2.5
9990
4.995
10000
5.0
Finalmente, es posible también estudiar el error desde el punto de vista estadístico, en razón
de que el cálculo del error acumulado al final del proceso es muy complejo (sólo en ciertos
casos puede considerarse como una suma de errores).
Así, la ecuación de transmisión de error viene dado por:
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
5
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
xi = (x1,x2,x3,........,xn), donde: xi son las variables.
El error de xi debido al error de cada xi viene dado por:
f xi
xi 0
n
Error absoluto: a ai
i 1
Error relativo: r
donde:
0
n
1
f xi
i 1
0
ri
xi
0
f xi
xi
0
valor esperado o más probable.
2. EVALUACIÓN DE UN POLINOMIO Y SUS DERIVADAS EN ARGUMENTO REAL
Considerando el polinomio de grado n en la variable x:
n
pn ( x ) ai x i a 0 a1 x a 2 x 2 ...... a n 1 x n 1 a n x n
i0
donde:
a 0 , a1 , a 2 ,...... .
Dicho polinomio puede ser evaluado en xo de las siguientes formas:
a)
pn ( x ) a 0 a
1 x 0 a 2 x 0 x 0 a 3 x 0 x 0 x 0 ...... a n x 0 .... x 0
1
2
3
n
El número de operaciones para llegar a evaluar pn ( x ) será:
n sumas
n(n 1)
1 + 2 3 n
2
b)
productos
3
x0n
x02
x0
2
n 1
pn ( x) a0 a1 x0 a2 x0 x0 a3 x0 x0 ......an x0 x0
1
2
2
2
donde el número de operaciones será:
n sumas
1 + 2 2 2 1 2(n 1) 2n 1 productos
n-1
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
6
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
pn ( x 0 ) a 0 a1 a 2 x 0 a 3 x 02 ........ a n 1 x 0n 2 a n x 0n 1 x 0
c)
a 0 ( a1 ( a 2 a 3 x 0 ........ a n 1 x 0n 3 a n x 0n 2 ) x 0 ) x 0
a 0 ( a 1 (a 2 ( a 3 ........ ( a n 1 a n x 0 ) x 0 ) x 0 ) x 0 .......) x 0
n sumas
para lo cual se requieren :
n productos
La última forma de evaluación se le conoce con el nombre de EVALUACIÓN
ENCESTADA, la misma que resulta ser la más adecuada por considerar el menor número
de operaciones.
Aplicando el PROCESO RECURSIVO en la última expresión, se tiene que:
bn = an
bn-1 = an-1 + bnX0
bn-2 = an-2 + bn-1X0
bi = ai + bi+1X0 i = (n-1), (n-2), .......,1, 0
b0 = a0 + b1X0 pn ( X 0 )
2.1.
ALGARITMO DE HORNER
Basado en la técnica de la DIVISIÓN SINTÉTICA de pn(x) (x - X0), por lo tanto:
an
an-1
bn X 0
an-1 + bn X 0
an
an-2
an-2
bn-1 X 0
+ bn-1 X 0
ai
bi1 X 0
ai + bi +1 X 0
al
b2 X 0
al + b2 X 0
bn
bn-1
bn2
bi
b
1
Coeficientes de pn-1( x) qn-1( x)
entonces:
para:
a0
b1 X 0
a0 + b1 X 0
X0
R0 b0 = residuo
pn ( x)
R0
qn-1 ( x)
, donde: pn ( x) ( x - X 0 )qn-1 ( x) R0
x X0
x X0
x = X 0 pn ( X 0 ) = R0 = b0 = a0 bl X 0
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
7
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
Repitiendo la división para qn-1(x), se tendrá lo siguiente:
bn
bn-1
bn-2
bi
b2
b1
bn
cn X 0
bn-1+cn X 0
cn-1 X 0
bn-2+cn-1 X 0
ci 1 X 0
bi+ci+1 X 0
c3 X 0
b2+c3 X 0
c2 X 0
b1+c2 X 0
c
cn
cn-1
cn2
ci
2
Coeficientes de qn-2 ( x) n-2 ( x)
donde:
para:
X0
R1 c1 = residuo
qn-1 ( x)
R1
n-2 ( x )
q n-1 ( x) ( x-X 0 ) n-2 ( x) R1
x X0
x X0
x = X 0 q n-1 ( X 0 ) = R1 = c1 = b1 c2 X 0
Repitiendo consecutivamente el proceso de la división, hasta agotar con el grado del
polinomio, se tendrá lo siguiente:
pn(x) = (x - X0) qn-1(x) + R0
Ec.1
qn-1(x) = (x - X0) n-2(x) + R1
Ec.2
n-2(x) = (x - X0) Sn-3(x) + R2
Ec.3
Sn-3(x) = (x - X0)tn-4(x) + R3
.
.
Ec.4
Ahora, sustituyendo Ec.2 en Ec.1: pn(x) = (x - X0) [(x - X0) n-2(x) + R1] + R0
= (x - X0)2 n-2(x) + (x - X0)R1 + R0
derivando: pnI ( x ) 2( x - X 0 ) n-2 ( x ) ( x X 0 ) 2 nI 2 (x) + R1
para x X 0 pnI ( X 0 ) q n 1 ( X 0 ) = c1
En general, sustituyendo Ec.2, Ec.3, Ec.4,…………………en Ec.1 se tiene que:
pn ( x ) ( x - X 0 ) n Rn ( x X 0 ) n 1 Rn-1 +................+( x - X 0 ) 2 R2 + ( x - X 0 ) R1 + R0
Derivando sucesivamente esta última expresión y evaluando en x = X0 , se tiene:
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
8
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
pn ( X0 ) R0
pn ( X0 ) qn-1 ( X 0 ) R1
I
pn ( X 0 ) 2! n-2 ( X0 ) 2! R2
II
pn ( X 0 ) 3!Sn-3 ( X0 ) 3!R3
III
pn ( X0 ) 4!tn-4 ( X0 ) 4! R4
IV
(i )
pn ( X 0 ) i!Ri i = 01
, ,........,n
pn ( X0 ) n!Rn Rn = an
( n)
n
RESUMEN: Evaluación de pn ( x ) ai x i y sus derivadas en X0.
i 0
Entrada: n (grado del polinomio), ai (coeficientes), X0 (argumento real)
Salida: Z k pn( k ) ( X 0 ) k = 0,1,....,n
ALGORITMO: Considerar: bn= an
Calcular: Zn = pn( n ) ( X 0 ) n ! a n
Para: k = 0,1,2,................., n-1
Hacer: i = n-1, n-2,................, k
Calcular: bi = ai + bi+1X0
Calcular: Zk = pn( k ) ( X 0 ) k !bk
2.2.
IMPLEMENTACIÓN
Uno de los procedimientos para la implementación del Algoritmo de Horner es a través de
un arreglo matricial, esto es:
A = [ai j ](n+1) (n+2)
Matriz de coeficientes
donde: Primera columna:
ei-1 = a(i, 1) => i = 1, 2, ........., n+1
Ultima fila:
en = a(n+1, j) => j = 2, 3, ........., n+2
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
9
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
Elemento general:
ei-1 = a(i, j) = a(i, j-1) + a(i+1,j) X0
donde: j = 2, 3, .........................., n+1
i = n, n-1, ......................, j-1
Evaluación: pn( k 1) ( X 0 ) ( k 1)! a ( k , k 1)
k 1, 2,.................., n 1
j
1
a0
a1
a2
a3
i
1
2
3
4
i+1
2
R0 = b0
b1
b2
b3
3
n+2
R1 = c1
c2
c3
ai bi = ai + bi+1X0 ci = bi + ci+1X0
n-1 an-2
n an-1
n+1 an
bn-2
bn-1
bn = an
cn-2
cn-1
cn = bn
Rn = an
Ejemplo.- Evaluar p4(x) = 2x4- 3x2 + 3x - 4 y sus derivados en Xo = -2
j
i
1
2
3
4
5
1
-4
3
-3
0
2
2
10 = R0
-7
5
-4
2
3
4
-49 = R1
21
45 = R2
-8
-12
2
2
5
6
-16 = R3
2
2 = R4
donde: p4(-2) = R0 =10 y todas las derivadas:
p4I ( 2) R1 49
p4II ( 2) 2!R2 90
p4III ( 2) 3!R3 96
p4IV ( 2) 4!R4 48
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
10
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
n
Ejemplo.- Describir un proceso de almacenamiento de los coeficientes de pn ( x ) ai x i
i 0
y de todos los residuos de las divisiones sintéticas, en un vector de longitud 2n+1
a0
a1
a2
1
2
3
ai
i+1
Coeficientes de pn(x):
bi = a(i+1,1)
i = 0, 1, 2, .................., n
Coeficientes de la primera división sintética:
C(2n+1-i) = a(i,1) = a[2(n + 1) - i,1] + a[2(n+1)-i+1,1] Xo
i = n+2, n+3, ……., 2n+1
Coeficientes de las siguientes divisiones sintéticas:
an-2
an-1
an
Rn-1
Rn-2
n-1
n
=Rn
n+2
n+3
Para k = 2n, 2n-1, ............................., n+2
Hacer: i = n+2, n+3,..........., k
Calcular: C(2n+1-i) = a(i, 1) + a(i-1, 1) X0
Residuos de las divisiones sintéticas:
Ri
Ri = a(2n+1 - i , 1)
R2
R1
R0
2n-1
2n
2n+1
i = 0, 1, 2, ................, n
Evaluación de pn(x) y sus derivadas:
pn(i ) ( X 0 ) i !a ( 2 n1i ,1) i 0,1,2,........, n
3. SOLUCIÓN DE ECUACIONES DE UNA VARIABLE
Se trata de un búsqueda de raíces, determinando valores de la variable x que satisfagan la
ecuación f(x) = 0.
Una solución de la ecuación se le conoce con el nombre de raíz de f(x) = 0
Los métodos de determinación de raíces se basan en PROCESOS ITERATIVOS, que
consisten en aproximaciones, paso a paso, hacia la raíz de la ecuación.
3.1.
MÉTODOS ITERATIVOS DE UNIÓN
Son métodos que se basan en el siguiente procedimiento:
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
11
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
Valor inicial: x0
Aproximaciones: x1 = x0 + 0
x2 = x1 + 1
.
.
.
xi
=
xi-1 + i-1
Condiciones de tolerancia:
i = 1, 2, .........hasta que satisfaga cualquier
condición de tolerancia.
xi xi 1 a
xi xi 1
r xi 0
xi
f ( xi ) f
Se trata de métodos simples, los mismos que garantizan convergencia. Dependen
exclusivamente de una adecuada elección del intervalo donde se encuentra la raíz y de la
condición de tolerancia que se le imponga.
Así, si f(x) es continua en [a, b] y además cumple que f(a)f(b) < 0, entonces S (a , b) , tal
que f(S) = 0 (Consecuencia del Teorema del Valor Intermedio).
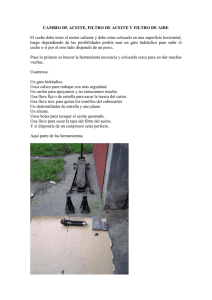
3.1.1. ALGORITMO DE BISECCIÓN
Es un método que divide, repetidamente, en la mitad a los subintervalos de [a, b],
desechando en cada paso la mitad de subintervalo que no contenga la raíz (como es lógico).
Geométricamente se tiene lo siguiente:
f(x)
f(b)
x3 x4
x
a
f(a)
x1
x2
b
S (raíz)
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
12
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
Asì:
Io = [a, b] intervalo inicial donde está la raíz (S).
Io = b - a ancho del intervalo inicial.
x1
a b
punto medio del intervalo inicial.
2
f (a ) f ( x1) 0 ?
condición para elección del nuevo intervalo (subintervalo)
f ( x1) f (b) 0 ?
I1 = [b = x0, x1] nuevo intervalo
ba
ancho del nuevo intervalo
2
x 0 x1
punto medio del nuevo intervalo
x2
2
f ( x1) f ( x 2) 0 ?
condición para elección de otro intervalo
f ( x 2 ) f ( x 0) 0 ?
.
.
I1
así sucesivamente hasta un k-ésimo intervalo Ik = [xk-1, xk ], cuyo ancho esta dado por:
Ik
ba
, el mismo que debe cumplir con una condición de tolerancia.
2k
RESUMEN: Evaluación de f(x) = 0
ENTRADA: [a, b] (intervalo), (tolerancia), k (máximo # de iteraciones).
SALIDA : xi (solución aproximada) S o un mensaje de fracaso.
ALGORITMO: Para: i = 1, 2, ….., k
xi 2 a
x i 1 b
Hacer:
Calcular: xi
x i 2 x i 1
2
Probar si: f(xi-2)f(xi) < 0 a = xi-2 y b = xi
de lo contrario:
a = xi y b = xi-1
Chequear si: |b - a| < x ó |f(xi)| < f
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
13
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
Una forma aproximada de determinar el número de iteraciones que se deben hacer para que
se consiga una aproximación con una tolerancia , puede ser obtenido en base a la siguiente
relación:
Ik
ba
2k
k
1 b a
ln
ln 2
donde k representa una cota del número de iteraciones.
Ejemplo: Determinar una raíz (valor aproximado) de la ecuación f(x) = x3 + 4x2 - 10,
mediante Bisección, considerando una tolerancia | r | < 10-4.
Definición del intervalo: si a = 1 f(1) = -5
b = 2 f(2) = 14
Entonces el intervalo: I0 = [1, 2] contiene al menos una raíz de la ecuación.
El cuadro de valores presentado a continuación, muestra los cálculos correspondientes al
proceso iterativo.
xi-1
a=1.0
1.0
1.25
1.25
.
.
1.3648
1.3650
Ii
1
2
3
4
.
.
12
13
xi-2
b=2.0
1.5
1.5
1.375
.
.
1.3652
1.3652
xi
x1=1.5
1.25
1.375
1.3125
.
.
1.3650
1.3651
f(xi)
2.375
-1.79687
0.16211
-0.84839
.
.
-0.00396
-0.00194
|r| = | (xi-xi-1)/xi |
0.33333
0.20000
0.09090
0.04762
.
.
0.00018
8.9421*10-5
donde: x13 = 1.365112305 S f(x13) 0
Así el valor correcto de S (raíz) con 10 cifras significativas es: 1.365230013.
Entonces x13 tiene una aproximación correcta con 4 CIFRAS SIGNIFICATIVAS.
Por otro lado, calculando el número de iteraciones (k) que llevan a una aproximación de la
raíz con 4 cifras significativas, se tiene que:
k
1 2 1
ln
13 Iteraciones
ln 2 10 4
Lo que concuerda con la tabla de valores anterior.
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
14
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
Para el mismo ejemplo, si se quiere una aproximación a la raíz con una tolerancia de 10-5,
entonces:
k
1 2 1
ln
17 Iteraciones
ln 2 10 5
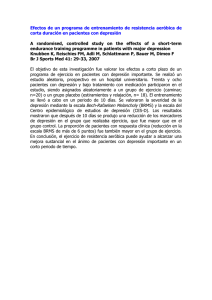
3.1.2. ALGORITMO DE FALSA POSICIÓN
Conocido también como algoritmo de REGULA FALSI, el mismo que está basado en el
criterio geométrico de la pendiente de la secante.
Entonces geométricamente se tiene:
f(x)
f(b)
B
a
x2
x1
x3
x
m1
m2
m3
S
b
A
f(a)
D
raíz
C
Donde: I0 = [a, b] intervalo inicial donde hay al menos una raíz
m1
f (b) f (a ) f (b) 0
pendiente de la secante AB
ba
b x1
donde: x1
a f (b) b f (a )
primera aproximación
f (b) f (a )
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
15
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
f (a ) f ( x1) 0 ?
condición para elección del nuevo intervalo
f ( x1) f (b) 0 ?
I1 = [b = x0, x1] nuevo intervalo
m2
f ( x 0) f ( x1) f ( x 0) 0
x0 x2
x 0 x1
x2
x 0 f ( x1) x1 f ( x 0)
f ( x1) f ( x 0)
pendiente de la secante CB
nueva aproximación
f ( x1) f ( x 2) 0 ?
condición para elección del nuevo intervalo
f ( x 2 ) f ( x 0) 0 ?
.
.
.
así sucesivamente hasta un k-ésimo intervalo Ik = [xk-1, xk]
donde: x k 1
x k 1 f ( x k ) x k f ( x k 1)
f ( x k ) f ( x k 1)
que es una aproximación que debe cumplir con una condición de tolerancia.
En este método es posible obtener un menor número de iteraciones que en el método
anterior. Los modelos de tolerancia para este caso, son los mismos que se aplican siempre,
esto es:
| x k+1 - x k | <
a
x k 1 x k
r
x k 1
| f(xk+1) | < f
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
16
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
RESUMEN: Evaluación de f(x) = 0
ENTRADA : Intervalo [a, b], tolerancia , # máximo de iteraciones k
SALIDA : xi S ó mensaje de fracaso
ALGORITMO:
Para: i = 1, 2, ….., k
xi 2 a
x i 1 b
Hacer:
Calcular: xi
xi 2 f ( xi 1) xi 1 f ( xi 2)
f ( xi 1) f ( xi 2)
Probar si: f(xi-2)f(xi) < 0 a = xi-2 y b = xi
de lo contrario:
a = xi y b = xi-1
Chequear si: |b - a| < x ó |f(xi)| < f
Ejemplo.- Determinar una raíz aproximada de la ecuación f(x) = Cos(x) - x, mediante el
algoritmo de Falsa Posición, considerar una tolerancia en la función | f | < 10-5.
Definición del intervalo: Para a = 0 f(0) = 1
b = 1 f(1) = -0.459698
Por lo tanto el intervalo inicial es: I0 = [0, 1]
Aplicando el algoritmo se obtienen los resultados presentados a continuación.
Ii
1
2
3
4
5
xi-1
a = 0.0
0.685073
0.736299
0.738945
0.739078
xi-2
b = 1.0
1.0
1.0
1.0
1.0
xi
x1=0.685073
0.736299
0.738945
0.739078
0.739085
f(xi)
0.089299
0.00466004
0.000233926
1.17192E-05
5.87047E-07
| f |
> 10E-5
> 10E-5
> 10E-5
> 10E-5
< 10E-5
donde: x5 = 0.7390847824 S f(x5 ) 0
Así, el valor correcto de S (raíz) con 8 cifras significativas es: 0.73908513…., por lo que x5
tiene una aproximación correcta con 5 CIFRAS SIGNIFICATIVAS.
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
17
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
3.2.
MÉTODOS ITERATIVOS DE PUNTO FIJO
Se trata de determinar la solución de una ecuación de la forma:
x = g(x)
A una solución de esta ecuación se le conoce como PUNTO FIJO de la función g(x).
Así, si g(x) es continua en [a, b] y además es diferenciable en (a, b), entonces S (a, b) tal
que:
S = g(S)
Geométricamente se tiene lo siguiente:
y
y=x
g(S)
y = g(x)
x
a
S
b
Las raíces de f(x) = 0, son las soluciones que corresponden precisamente a los puntos fijos
de x = g(x), puesto que de f(x) se pueden obtener x y g(x), esto es:
f(x) = x - g(x) = 0 x = g(x)
El proceso iterativo, en estos métodos, consiste en ir evaluando x varias veces hasta tener
una buena aproximación a la raíz, basándose en la ecuación x = g(x).
Así: * Valor inicial: x0
* Aproximaciones: x1 = g(x0)
x2 = g(x1)
.
.
.
xi = g(xi-1) i = 1, 2, ….., hasta que se cumpla con una
condición de tolerancia (error).
* Condiciones de Tolerancia: |xi - xi-1| < a
xi xi 1
r
xi
|xi - g(xi)| < f
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
18
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
Estos procesos no siempre convergen, por lo que se requiere de alguna condición que en
cierto grado garantice un acercamiento a la raíz. Además la elección de g(x) debe ser tal que
haga la convergencia tan efectiva como sea posible.
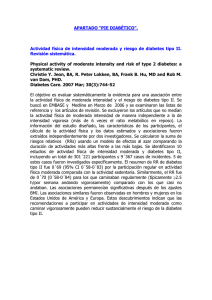
Las gráficas presentadas a continuación señalan la convergencia y la no convergencia del
proceso iterativo.
y
g(xo)
g(x2)
y=x
g(S)
g(x1)
y = g(x)
a
x0
x2
S
(raíz)
x1 b
x
y
g(xo)
y=x
g(S)
g(x1)
.
y = g(x)
x2 a x0 s
(raíz)
x1
b
x
3.2.1. CONDICIONES DE CONVERGENCIA EN LOS LÍMITES DEL
INTERVALO
Una iteración i-ésima dada por: xi S i , también: xi 1 S i 1 donde: S es la raíz y
i la tolerancia.
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
19
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
Es evidente entonces, que para la convergencia, se cumpla con una condición de
acercamiento a la raíz, lo cual se puede expresar, en función de los errores en cada paso
iterativo, de la siguiente forma:
i
i 1
.... 2 1
0
condición básica de convergencia.
Por otro lado, debido al criterio de punto fijo, se tiene que: xi g( xi 1) , entonces:
S i g ( S i 1) ,
cuya expansión en SERIES DE TAYLOR de la función g
alrededor de S, viene dada por:
S i g ( S ) g , ( S )[( S i 1) S ]
g ,, ( S )
g ,,, ( S )
[( S i 1 ) S ] 2
[( S i 1 ) S ] 3 ............
2!
3!
Sabiendo que se cumple S = g(S), entonces: i
g ,, ( S ) 2
g ,,, ( S ) 3
g ( S ) i 1
i 1
i 1 ......
2!
3!
,
Esta última expresión puede ser sometida a una serie de condiciones, esto es:
Condición N1
g’(S) 0
i-1 pequeño 2 i 1 , 3i 1 ,.... 0
para lo cual : i g ( S )i 1
donde:
i g ( S ) i 1
i < i 1 , por lo tanto: i g ( S ) i 1 < i 1 , donde: g ( S ) 1
pero
Por lo tanto en los valores límites del intervalo (a, b) se tiene que:
a
g ( x) b 0 y
Condición N2
g ( x)
a
b
1
g’(S) = 0
g’’(S) 0
i-1 pequeño
condiciones de convergencia de primer orden
g (S ) 2
i 1
2!
1
g ( S ) 2 i 1
2!
entonces: i
i
i 1 , donde: g ( S )
2!
i 1
Por lo tanto en los valores límites del intervalo (a, b) se tiene que:
a
a
g ( x) b 0 , g ( x) b 0 y g ( x)
a
b
2
condiciones de convergencia de
segundo orden.
Condición N3
g’(S) = g’’(S) =0
g’’’(S) 0
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
20
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
i-1 pequeño
entonces :
g ( S ) 3
i 1
3!
1
g ( S ) 3 i 1
3!
i
i
i 1 , donde: g ( S )
3!
2 i 1
Por lo tanto en los valores límites del intervalo (a, b) se tiene que:
a
a
a
g ( x) b g ( x ) b 0 , g ( x ) b 0 y
g ( x)
a
b
3!
condiciones de convergencia
2
de tercer orden
Así sucesivamente, sin embargo debe señalarse que los procedimientos iterativos que
cumplen con la condición de convergencia de segundo orden son los más adecuados.
3.2.2. ALGORITMO DE PRIMER ORDEN
Se trata de un proceso iterativo de punto fijo que cumple con las condiciones de
convergencia de primer orden.
Es decir que g(x) debe ser definida de manera que por lo menos cumpla con las condiciones:
a
g ( x ) b 0 y g ( x)
a
b
1 , puesto que S es desconocido.
RESUMEN: Evaluación de x = g(x) que cumple con las condiciones de convergencia de
primer orden.
ENTRADA: Valor inicial x 0 (a , b) , Tolerancia
iteraciones k
, número máximo de
SALIDA: xi S o mensaje de fracaso.
ALGORITMO: Para: i = 1, 2, ...., k
Calcular: xi = g(xi-1)
Chequear si: xi xi 1 x
ó
f ( xi ) f
Ejemplo: Para la ecuación f(x) = x3 + 4x2 - 10 = 0 que tiene una raíz en [1, 2], definir 5
formas diferentes de g(x) sin probar ninguna condición de convergencia de primer
orden. Asumir para todos los casos x0 = 1.5 y obtener la raíz. Escribir las
conclusiones de acuerdo a los resultados obtenidos.
Definiciones de g(x)
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
21
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
I)
x = g1(x) = x - x3 - 4x2 + 10
II)
10
x = g2(x) = 4 x
x
III)
x = g3(x) =
IV)
10
x = g4(x) =
4 x
V)
x = g5(x) = x
1/2
1
1/ 2
10 x 3
2
1/2
x 3 4 x 2 10
3x2 8 x
la tabla de valores presenta las 5 alternativas de g(x) y los cálculos correspondientes a las
aproximaciones a la raíz
i
0
1
2
3
4
5
.
.
10
15
20
30
I
II
1,5
-0,875
6,732
-469,7
1,03E+08
1,5
0,8165
2,9969
(-8,65)1/2
III
1,5
1,28695
1,40254
1,34546
1,37517
1,36009
.
.
1,36541
1,36522
1,36523
1,36523
IV
1,5
1,34840
1,36738
1,36496
1,35526
1,36523
.
.
1,36523
1,36523
V
1,5
1,37333
1,36526
1,36523
1,36523
Conclusión: Siendo la raíz real S = 1.365230013, las alternativas III, IV y V han dado
excelentes resultados, mientras que el caso I provoca divergencia y el caso II
se torna indefinido.
Así, para el caso (I)
g1(x) = x - x3 - 4x2 + 10
g’1(x) = 1 - 3x2 - 8x 0 en [a = 1 y b = 2]
pero: x = a = 1.001 g , 1 (1001
. ) 1
x = b =1.999 g , 1 (1.999) 1
demostrándose que no se cumple con la condición de convergencia de primer orden.
3.2.3. ALGORITMO DE SEGUNDO ORDEN
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
22
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
Se trata de un proceso iterativo de punto fijo que cumple con las condiciones de
convergencia de segundo orden.
Uno de los algoritmos más conocidos y poderosos en la búsqueda de raíces de la ecuación
f(x) = 0 es el llamado ALGORITMO DE NEWTON - RAPHSON, el cual define una
función g(x) que cumple con las condiciones de convergencia de segundo orden.
Así, si f(x) es continua y diferenciable en [a, b] y además siendo xi-1 una buena aproximación
a la raíz S, tal que f ’(xi-1) 0, entonces f(x) expandida en Series de Taylor alrededor de S
viene dada por:
f ( x ) f ( xi 1 ) f ( xi 1 )[ x xi 1 ]
f ( x i 1 )
f ( xi 1 )
[ x x i 1 ] 2
[ x xi 1 ]3 ...
2!
3!
asumiendo además que: x = xi S, entonces f(S) f(xi-1) + f ’(xi-1)[xi - xi-1] = 0, donde:
x i x i 1
f ( x i 1 )
g ( x i 1 )
f ( x i 1 )
la última expresión puede ser obtenida de la siguiente gráfica
f(x)
a = xo
S
x3
x2
x1
x
Primera tangente (en x0) f ( x 0 )
f ( x0 )
f ( x0 )
x1 x 0
primera aproximación
x1 x 0
f ( x0 )
Segunda tangente (en x1) f ( x1 )
f ( x1 )
f ( x1 )
x 2 x1
segunda aproximación
x1 x 2
f ( x1 )
Así sucesivamente hasta que se cumpla con un criterio de convergencia.
En general se puede asumir una función de punto fijo de la forma: g ( x ) x
f ( x)
f ( x)
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
23
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
la misma que cumple con los criterios de convergencia de segundo orden, como se
demuestra a continuación:
g( x ) x
f ( x)
f ( x)
[ f ( x )]2 f ( x ) f ( x ) f ( x ) f ( x )
g ( x) 1
[ f ( x )]2
[ f ( x )]2
g ( S )
f (S) f (S)
0 puesto que f(S) = 0 y f ’(S) 0
[ f ( S )]2
para: x = S
También
[ f ( x )]2 f ( x ) f ( x ) [ f ( x )]3 f ( x ) 2 f ( x )[ f ( x )]2 f ( x )
g ( x)
[ f ( x )]4
para: x = S
g (S )
además:
g (S )
f (S)
0 puesto que f ’(S) y f ’’(S) 0
f (S )
f (S )
2
f (S)
i 1
La eficacia del algoritmo de Newton - Raphson radica en la buena elección del valor inicial.
La convergencia es relativamente rápida comparada con los métodos anteriores.
RESUMEN: Evaluación de la ecuación x = g(x) que cumple con las condiciones de
convergencia de segundo orden.
ENTRADA: Valor inicial x0 (a , b) , Tolerancia , # max. de iteraciones k.
SALIDA: xi S o mensaje de fracaso.
ALGORITMO: Para i = 1, 2, ......, k
Chequear si f ’(xi-1) 0
Calcular: xi = xi -1 -
f ( xi -1 )
f ( xi -1 )
Probar si: xi xi 1 x ó
f ( xi ) f
Ejemplo: Determinar una raíz de la ecuación x = Cos(x) mediante Newton - Raphson,
considerando una tolerancia
y
x 10 4
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
24
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
y=x
y = Cosx
o
/2
S
x
En la gráfica se observa que en el intervalo [0, /2] existe un punto fijo S.
Entonces:
f(x) = Cos(x) - x
f ’(x) = -(Sen(x) +1)
donde :
xi xi 1
Cosxi 1 xi 1
Senxi 1 1
La tabla de valores presenta los cálculos de las aproximaciones, obtenidas en base al modelo
de la última expresión iterativa.
i
1
2
3
4
xi-1
xo = 0
1.0
0.75036
0.73911
xi
f(xi)
-0.45970
-0.018923
4.6456E-05
-2.8473E-10
1
0.75036
0.73911
7.39E-01
| x |
1.0
0.24964
0.011251
2.7757E-05
Por tanto: x4 = 0.7390851334 S f(x4) 0
3.2.4. ALGORITMO DE LA SECANTE
Se basa en Newton - Raphson y Falsa Posición. Es un método que de alguna manera evita
la evaluación de f ’(x) en cada aproximación. Además la elección del valor inicial no es tan
crítica.
f ( x ) f ( xi 1 )
Así, partiendo de: f ( xi 1 ) lim
x xi 1
x xi 1
y asumiendo que: xi-2 es una buena aproximación a la raíz.
Entonces:
x xi 2
puesto que:
x i x i 1
f ( xi 1 )
f ( xi 1 )
f ( x i 1 )
f ( xi 2 ) f ( x i 1 )
xi 2 xi 1
x i x i 1
( x i 2 x i 1 ) f ( x i 1 )
f ( x i 2 ) f ( x i 1 )
g ( x i 1 , x i 2 )
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
25
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
La función g ( x i 1 , x i 2 ) no es continua, por lo que este método realmente no es de punto
fijo, sin embargo cumple con las condiciones de convergencia, esto es: S =g(S) y además es
posible demostrar que:
i 21
f (S)
f ( S ) i 1 i 2
i 21
donde:
f ( s)
f ( s)
f (S)
f (S)
i 1 i 2
2
i 1
i1
, condición parecida a la del método de Newton - Raphson.
Gráficamente se pueden observar las aproximaciones del método de la Secante
f(x)
xo
x2
x3
x
S
x4
x1
a) Aproximaciones convergentes
f(x)
xo
x2
x3
S
x1
x
x4
b) Aproximaciones divergentes
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
26
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
Ejemplo: Determinar la raíz de f(x) = Cos(x) - x mediante el método de la Secante,
considerando | x | 10-4
Aproximaciones iniciales:
xo = 0.5
x1 = /4
( xi 1 xi 2 )(Cosxi 1 xi 1 )
(Cosxi 1 xi 1 ) (Cosxi 2 xi 2 )
además:
x i x i 1
donde:
f ( xi ) Cosxi xi
La tabla de valores presenta los cálculos correspondientes al ejemplo.
i
0
1
2
3
4
xi
0.5
/4
0.73638
0.73906
0.73909
f(xi)
0.37758
-0.078291
0.0045177
4.5177*10-5
-2.6982*10-8
ax
0.2854
0.04901
0.002674
2.7010*10-5
donde: x4 S f(x4) 0
3.3.
SOLUCIÓN DE ECUACIONES POLINOMIALES
Pese a que en el capítulo anterior (Solución de Ecuaciones de una variable) se involucra la
ecuación polinómica, no está por demás hacer un análisis más detallado del modelo
polinomial, en cuanto tiene que ver con el análisis de las características de sus raíces así
como también de la ubicación en el plano complejo y sobre todo el desarrollo de Algoritmos
específicos para determinar dichas raíces.
El análisis se basa en la consideración de la ecuación polinomial del tipo dado por:
n
pn ( x ) a i x i 0 {ai } a n 0
i 0
Según el Teorema Fundamental del Algebra, una ecuación polinomial pn(x) = 0 tiene
constantes únicas: 1, 2, 3, ……., k (reales y/o complejas) y enteros positivos m1, m2, m3,
……, mk, tal que:
k
m
i 1
i
n (grado del polinomio) y además se tiene:
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
27
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
pn ( x ) a n ( x 1) m1 ( x 2 ) m2
( x 2 ) mk 0
siendo las constantes: k las raíces de pn(x) = 0 y mk la multiplicidad de la raíz
a n 1
y
k a
n
Además se tiene que:
( 1) n a o
k
an
También se ha demostrado que todas las raíces de pn(x) = 0 se hallan localizadas en el anillo
complejo dado por:
a0
a0
x
an
an
max a a
i
0
donde:
max a i a n
Ejemplo: Determinar el anillo complejo donde se ubican todas las raíces del polinomio
dado por p3 ( x ) x 3 3x 2 5x 2 0
max1, 3, 5 5
donde:
max3, 5, 2 5
entonces:
2
51
x
5 2
1
2
7
x 6
y
x
6
2/7
Por otro lado, una forma de reducir el área del anillo complejo, es mediante la manipulación
de los coeficientes del polinomio de tal manera que se obtenga un polinomio normalizado
equivalente al original, así dado el polinomio:
pn ( x ) a n x n a n1 x n 1 a1 x a 0
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
28
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
donde:
pn ( x )
a
a
a
x n n1 x n1 1 x 0
an
an
an
an
entonces el polinomio normalizado viene dado por:
qn ( x ) x n An1 x n 1 A1 x A0
Ai
ai
i n 1, n 2, ,0
an
dividiendo el polinomio normalizado para la constante hn ,se tiene:
n
A x
qn ( x ) x
n 1
n
h
h
h h
considerando:
n 1
A1 x A0
h n 1 h h n
A0
1 , entonces:
hn
n
qn ( x)
x x
x
q n Bn 1
n
h h
h
h
n 1
x
B1 1
h
x
y h
q n ( y ) y n Bn 1 x n 1 B1 x 1
B Ai i n 1, n 2, ,1
i h n 1
El polinomio q n ( y ) es equivalente al polinomio pn ( x ) , por lo que el anillo complejo viene
dado por:
max 1, B , B , , B
1
n 1
n 2
1
1
y
, donde
1
1
max Bn 1 , Bn 2 , , 1
k Bn 1
k ( 1) n
y además se tiene que:
y
Ejemplo:
Transformar el polinomio del ejemplo anterior de manera que tenga al menos
una raíz menor que la unidad.
3
2
p3 ( x ) x
5
3 x
12
3
h
h
h h
h
donde:
x 2
n
h h
h 3 2
2
2
2
h 2 3
3 1
h
1
3
h 2
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
29
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
por lo que:
max1, 2.38, 315
. 315
.
q3 ( y ) y 2.38 y 315
. y 1
. , 1 315
.
max2.38, 315
3
2
entonces el anillo complejo vendrá determinado mediante los límites dados por:
315
. 1
1
x
y
0.24 4.15
315
. 1
1
h
Es conveniente tener una idea del tipo de raíces que tiene un polinomio, así, según la
REGLA DE DESCARTES es posible analizar alternativas en cuanto al número de raíces
reales positivas y/o negativas, según el siguiente criterio:
Se procede a ordenar el polinomio, respecto a la potencia de x, en forma ascendente o
descendente, así, considerando:
pn ( x ) a n x n a n1 x n 1 a1 x a 0
se procede a contar el número de veces que cambia el signo de los coeficientes, siguiendo
un recorrido en el mismo sentido, entonces:
q = # de cambios de signo en pn(x),
q, = # de cambios de signo en pn(-x)
con lo cual se forman los conjuntos de valores pares:
(q - r) 0, 2, …., q
(q, - r, ) 0, 2, …., q,
donde se obtiene:
r = # de raíces reales “positivas” de pn(x)
r, = # de raíces reales “negativas” de pn(x)
finalmente se harán todas las combinaciones entre los valores de r y r, para analizar las
alternativas de raíces reales probables que tendrá el polinomio pn(x).
Ejemplo: Analizar las alternativas probables de las raíces reales del polinomio dado por:
p4 ( x ) x 4 x 3 2 x 2 6 x 4
Puesto que el polinomio está ordenado, entonces: q = 1
además:
entonces:
p4 ( x ) x 4 x 3 2 x 2 6 x 4 donde q, = 3
(1 - r) = 0
(3 - r,) = 0, 2
r=1
r, = 3, 1
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
30
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
por lo tanto, las alternativas probables serán:
I) 1 raíz real “positiva” y 3 raíces reales “negativas”
II) 1 raíz real “positiva” y 1 raíz real “negativa”
donde la característica común, en las dos alternativas, es que el polinomio tendrá al menos
1 raíz real “positiva” y 1 raíz real “negativa”.
En efecto, el polinomio descompuesto en sus factores, viene dado por:
p4 ( x ) x 4 x 3 2 x 2 6 x 4 ( x 1)( x 2)( x 2 2 x 2)
donde se puede confirmar la característica común analizada.
3.3.1. ALGORITMO DE NEWTON - HORNER
Es un método para determinar raíces reales de un polinomio pn(x) n 3
Para aplicar este método es conveniente que el polinomio tenga al menos una raíz real y que
el valor inicial xo sea elemento del anillo complejo.
El proceso consta de los siguientes pasos:
x 0 valor inicial
pn ( x 0 ) pn, ( x 0 ) evaluación mediante Horner
p (x )
x1 x 0 n, 0 evaluación mediante Newton
pn ( x 0 )
Así sucesivamente se van determinando nuevas aproximaciones a la raíz. Cabe señalar que
el proceso es semi - iterativo, por lo que debe cumplir con una de las condiciones de parada
(condición de error o tolerancia).
n
Por otro lado, si se tiene un polinomio normalizado: pn ( x ) a i x i , donde a n 1 , una
i 0
forma de elegir un valor inicial que esté dentro del anillo complejo, es mediante el análisis
de la característica común, obtenida de aplicar la Regla de Descartes, la misma que señalará
si la raíz real es positiva o negativa, para lo cual se elige el signo correspondiente en la
siguiente relación:
x0
a0
a1
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
31
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
n
RESUMEN: Evaluación de pn ( x ) ai x i 0 normalizado.
i 0
ENTRADA: Coeficientes ai , Tolerancia , # máximo de iteraciones k,
valor inicial x 0
a0
a1
SALIDA: xi r o Mensaje de fracaso.
ALGORITMO:
Para i = 1, 2, ……, k
Chequear si: pn' ( xi 1 ) 0 .
Calcular: xi xi 1
pn ( xi 1 )
.
pn' ( xi 1 )
Probar si: x i xi 1 x ó pn (x i ) p .
Ejemplo: Determinar las raíces reales de la ecuación: x 4 x 3 2x 2 6x 4 0 ,
considerar una tolerancia p 10 3 .
Valor inicial: x 0
4
0,6666...
6
Evaluación de p4 ( x 0 ) p4' ( x 0 ) 0 mediante HORNER:
i
j
1
2
3
1
-4
-0.9876…
p 4 (0.666... )
2
-6
-4.5185…
-3.1851…
p4' ( 0.666...) 0
3
-2
-2.222….
-2.0
4
1
0.3333…
-0.3333…
5
1
1
1
Primera aproximación mediante NEWTON:
x1 0.666...
0.9876...
0.9767...
3.185...
Evaluación de p4 ( x1 )
p4' ( x1 ) 0 mediante HORNER:
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
32
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
i
j
1
2
3
1
-4
-0.06926…
2
-6
-4.02432…
-2.9583…
3
-2
-2.02271…
-1.0914…
4
1
0.02325…
-0.9534…
5
1
1
1
x 2 0.9767...
Segunda aproximación:
Evaluación de p4 ( x 2 )
p 4 (0.9767... )
p4' ( 0.9767...) 0
0.06926...
100015
.
...
2.9583...
p4' ( x 2 ) 0
1
2
1
-4
0.000472845
p4 (x 2 ) 10 3 cumple con la tolerancia impuesta
2
-6
-3.999842444
.
3
-2
-1.99984237
4
1
-0.0001576055
5
1
1
i
j
Según esto ya no hace falta el cálculo de p4 ( x 2 ) , puesto que el proceso de búsqueda de la
raíz ha terminado.
Por lo tanto: x2 1000157605
.
es una aproximación a la raíz real.
Si se procede a DEFLACIONAR la ecuación dada, se tiene lo siguiente:
.
)( x 3 0.0001576055x 2 199984237
.
p4 ( x ) ( x 1000157606
x 3.999842444).
Repitiendo el proceso anterior para la ecuación cúbica, se tiene:
Valor inicial: x 0
3.999842444
2.00007...
199984237
.
con lo cual se tiene: p3 ( x 0 ) 0.0001576055
p3 ( x 0 ) 10 3 .
DEFLACIONANDO nuevamente, se tiene finalmente que:
( x 1000157606
.
)( x 2.000078858)( x 2 1999842394
.
x 1999842419
.
) 0.
En términos reales, la descomposición en factores de la ecuación es:
p 4 ( x ) (x 1)( x 2)( x 2 2x 2).
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
33
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
3.3.2. ALGORITMO DE NEWTON - BAIRSTOW
Es un método para determinar raíces reales y/o complejas de un polinomio p n ( x ) n 3.
Este método define un FACTOR CUADRATICO de la forma: x 2 ux v , cuyas raíces
pueden ser reales o complejas, dependiendo de los valores de u, v.
n
Considerando el polinomio de la forma:
p n ( x ) a i x i a n 0.
i0
y mediante una división sintética de p n (x ) para x 2 ux v , se tiene lo siguiente:
pn ( x )
x ux v
2
q n 2 ( x )
(x u)b1 b0
x 2 ux v
, con lo que
p n ( x ) ( x 2 ux v )q n 2 (x ) ( x u)b1 b0
donde: q n 2 (x ) b2 b3 x ..... bn 2 x n 4 bn 1 x n 3 bn x n 2
así, reemplazando q n 2 ( x ) en p n (x ) , se tiene que:
p n ( x ) (b0 ub1 vb2 ) (b1 ub2 vb3 )x ... (bn 2 ubn 1 vbn ) x n 2 (bn 1 ubn )x n 1 bn x n
según lo cual se obtienen las siguientes relaciones recursivas:
bn a n
bn 1 a n 1 ubn
bn 2 a n 2 ubn 1 vbn
b j a j ub j 1 vb j 2 j n 2, ... ,0
b1 a 1 ub2 vb3 f (u, v )
b0 a 0 ub1 vb2 g (u, v )
Entonces el método para la obtención de raíces reales y/o complejas, consiste en determinar
valores de u v tales que hagan que b1 b0 sean iguales a cero, con lo que:
p n ( x ) ( x 2 ux v )q n 2 (x ).
f ( u, v ) 0
Por lo tanto debe resolverse el sistema de ecuaciones:
g ( u, v ) 0
Para resolver el sistema de ecuaciones se usa el ALGORITMO DE NEWTON en 2
variables dado por el siguiente desarrollo:
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
34
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
Si f (u, v ) g ( u, v ) son funciones continuas y diferenciables en el intervalo a , b y además
sean ui 1 v i 1 buenas aproximaciones a las raíces s t respectivamente, tales que
f `(ui 1 , v i 1 ) g `(ui 1 , v i 1 ) 0 , entonces la expansión en series de Taylor de las
funciones f (u, v ) g ( u, v ) alrededor del punto (s, t) viene dada por:
f
f ( u, v ) f ( ui 1 , v i 1 )
u
g ( u, v ) g ( u , v ) g
i 1
i 1
u
donde:
f
u
g
u
i 1
[ u ui 1 ]
i 1
[u ui 1 ]
i 1
f
v
g
v
[ v v i 1 ]
i 1
[ v v i 1 ]
i 1
f
v
además:
g
v
f (ui 1 , v i 1 )
u
g (ui 1 , vi 1 )
u
i 1
f (ui 1 , vi 1 )
v
g (ui 1 , vi 1 )
v
i 1
i 1
u ui s
Por otro lado considerando:
, entonces:
v vi t
f
f ( s, t ) 0 f (ui 1 , vi 1 ) (ui ui 1 )
u
g ( s, t ) 0 g (u , v ) (u u ) g
i 1
i 1
i
i 1
u
ui
donde:
vi
Wi
f
f
ui 1 u i 1 v i 1
vi 1
g
g
Wi 1
u i 1 v i 1
(vi vi 1 )
i 1
f
v
g
( v i v i 1 )
v
i 1
i 1
i 1
1
f (ui 1 , vi 1 )
g (ui 1 , vi 1 )
H (Wi 1 )
Ji11
entonces: Wi Wi 1 J i11 H (Wi 1 )
ecuación matricial iterativa de punto fijo de
segundo orden, conocido como NEWTON en 2
variables. J : Jacobiano.
Ahora, derivando las expresiones de b j , dentro de un proceso iterativo, se tiene que:
bn
u
0
i 1
bn1
u
bn
i 1
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
35
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
bn 2
u
bn 3
u
bn(i11) ui 1
i 1
bn(i21) ui 1
i 1
bj
u
b j(i11) ui 1
También :
b2(i 1) ui 1
i 1
i 1
bn
v
i 1
bn 2
v
bn 3
v
bn 4
v
vi 1
i 1
u
b2
u
bn1
v
b3
u
b
v i 1 2
u
i 1
j n 3,....,0
i 1
i 1
f
u
g
u
i 1
i 1
i 1
0
i 1
i 1
bn 2
v
bn(i11) ui 1
i 1
bn(i21) ui 1
i 1
b j(i21) ui 1
b3(i 1) ui 1
i 1
b2(i 1)
i 1
bn 3
v
i 1
vi 1
i 1
b j 1
i 1
b1
v
b0
v
u
i 1
i 1
i 1
b j 2
vi 1
v i 1
bn 1
u
bn
bj
v
bn 2
u
b
ui 1 1
u
b1(i 1)
i 1
b j 1
i 1
b1
u
b0
u
bn 1
u
v
b2
v
b
ui 1 1
v
vi 1
i 1
v i 1
i 1
bn 2
v
i 1
b j 2
v
b3
v
b
v i 1 2
v
i 1
j n 4,....,0
i 1
i 1
f
v
g
v
i 1
i 1
i 1
cambiando de variables, se tiene :
bn1
u
cn bn a n
i 1
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
36
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
bn 2
u
bn 3
u
cn(i11) bn(i11) ui 1cn
i 1
cn( i21) bn(i21) ui 1cn( i11) vi 1cn
i 1
b j 1
u
c (ji 1) b (j i 1) ui 1c (ji11) vi 1c (ji21) j n 2, n 3,....,1
i 1
b1
u
b0
u
c2(i 1) b2(i 1) ui 1c3( i 1) vi 1c4(i 1)
i 1
c1(i 1) b1(i 1) ui 1c2(i 1) vi 1c3(i 1)
i 1
También, y puesto que :
bn 2
v
bn 3
v
bn 4
v
b1
v
b0
v
g
u
Ec. 1
i 1
Ec. 2
i 1
bn a n , entonces :
i 1
cn bn a n
i 1
cn(i11) bn( i11) ui 1cn
i 1
cn(i21) bn(i21) ui 1cn(i11) v i 1cn
i 1
b j 2
v
bn 2
v
f
u
c (ji 1) b (j i 1) ui 1c (ji11) vi 1c (ji21) j n 2, n 3,....,2
i 1
c3(i 1) b3(i 1) ui 1c4(i 1) vi 1c5(i 1)
i 1
c2(i 1) b2(i 1) ui 1c3(i 1) vi 1c4(i 1)
i 1
f
v
g
v
Ec. 3
i 1
Ec. 4
i 1
Por lo tanto, reemplazando las expresiones Ec.1, Ec.2, Ec.3 y Ec.4 en la ecuación matricial
iterativa de punto fijo de NEWTON, se tiene lo siguiente:
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
37
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
ui ui 1 c2(i 1)
(i 1)
vi vi 1 c1
1
c3( i 1) b1(i 1)
c2( i 1) b0(i 1)
c2(i 1) b1(i 1) c3(i 1) b0(i 1)
u
u
i 1
i
J (i 1)
c1(i 1) b1(i 1) c2(i 1) b0(i 1)
donde: vi vi 1
J ( i 1)
( i 1) 2
c1(i 1) c3(i 1)
J (i 1) c2
El proceso iterativo avanzará hasta que se cumpla con una condición de tolerancia, como:
ui ui 1
vi vi 1
a
,
ui ui 1
ui
vi vi 1
vi
r
,
f (ui , vi )
g (ui , vi )
H
,
b1(i 1)
b0(i 1)
b
así, el polinomio toma la siguiente forma:
pn ( x ) ( x 2 ui x vi )q n(i21) ( x ) , donde:
q n(i21) ( x ) b2(i 1) b3( i 1) x b4( i 1) x 2 bn(i11) x n 3 bn(i 1) x n 2
Entonces qn-2(x) es un polinomio obtenido de la deflación de pn(x) a través del factor
cuadrático (x2 - ui x - vi).
Por otro lado, si pn(x) = 0 entonces para el caso de raíces complejas, el factor cuadrático
tendrá la forma dada por:
( x j )( x j )
u 2
donde: x 2 2x ( 2 2 )
2
2
v
Además una aproximación inicial de (u0, v0) debe ser lo más cercana a (s, t)
n
RESUMEN: Evaluación de la ecuación pn ( x ) ai x i 0
i 0
ENTRADA: Coeficientes ai, Aproximación inicial (u0, v0), Tolerancia , # máximo
de iteraciones k.
SALIDA:
(ui, vi) (s, t) ó Mensaje de fracaso.
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
38
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
ALGORITMO:
Para i = 1, 2, ...., k
Considerar: cn(i 1) bn(i 1) a n
bn(i11) a n1 ui 1bn(i 1)
cn(i11) bn( i 11) ui 1cn(i 1)
Hacer: j n 2, n 3, ,0
Calcular: b (j i 1) a j ui 1b (j i 11) vi 1b (j i21)
Hacer: j n 2, n 3, ,1
Calcular: c (ji 1) b (j i 1) ui 1c (ji11) vi 1c (ji21)
Chequear si: J (i 1) c2( i 1)
2
c1(i 1) c3(i 1) 0
Calcular: ui ui 1
1
c2(i 1) b1(i 1) c3(i 1) b0(i 1)
J (i 1)
v i v i 1
1
c1(i 1) b1(i 1) c2(i 1) b0(i 1)
J (i 1)
Probar si: ui ui 1 v i vi 1 W o
f (ui , v i ) g (ui , vi ) H
Ejemplo:
Determinar las raíces del polinomio p3(x) = x3 - x2 + x - 2 = 0 mediante el
Algoritmo de Newton - Bairstow, considerar (u0, v0) = (0.5, -1.5) y una
tolerancia H 10-3.
coeficientes: c3 = b3 = a3 = 1
a2 = - 1, a1 = 1, a0 = - 2
entonces:
b2(i 1) a 2 ui 1b3
c2(i 1) b2( i 1) ui 1c3
b1(i 1) a1 ui 1b2(i 1) vi 1b3
c1( i 1) b1(i 1) ui 1c2( i 1) vi 1c3
b0(i 1) a 0 ui 1b1(i 1) vi 1b2(i 1)
además:
c2(i 1) b1(i 1) c3(i 1) b0(i 1)
u
u
i 1
i
J (i 1)
c1(i 1) b1(i 1) c2(i 1) b0(i 1)
vi vi 1
J ( i 1)
( i 1) 2
c1(i 1) c3(i 1)
J (i 1) c2
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
39
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
Por lo tanto, el resumen de cálculos se presenta en la siguiente tabla:
i
0
b2(i-1)
-
1 -0,5
C2(i-1)
0,0
b1(i-1)
-0,75
b0(i-1)
-1,625
C1(i-1)
-2,25
J(i-1)
2,25
i
0,5
i
-1,5
-0,22222 -0,75000
2 -1,22222 -1,44444 0,52160 -1,19925 0,09259 1,99383 -0,44582 -1,59458
3 -1,44582 -1,89164 0,05000 0,28319 -0,70125 4,27956 -0,35755 -1,47760
4 -1,35755 -1,71510 0,00779 0,00313 -0,85657 3,79814 -0,35321 -1,47794
5 -1,35321 -1,70641 0,00002 -0,00004 -0,87521 3,78706 -0,35321 -1,47797
Entonces:
Así:
u5 0.35321 s
.
t
v5 147797
p3(x) = (x2 + 0.35321x + 1.47797)(x - 1.35321) r1 = - 0.17660 + j1.20282
r2 = - 0.17660 - j1.20282
r3 = 1.35321
3.3.3. EVALUACIÓN DE POLINOMIOS Y SUS DERIVADAS EN ARGUMENTO COMPLEJO
Como una consecuencia del método Newton - Bairstow, se pueden evaluar polinomios y
sus derivados en argumento complejo.
Así, considerando el argumento complejo de la forma: = + j, entonces se pueden tener
cualquiera de las siguientes alternativas:
1) Si: = r (raíz del polinomio pn(x)) b1 = b0 = 0
2) Si: r b1 b0 0
Además si se forma un factor cuadrático cuyas raíces sean j, entonces mediante el
criterio de la división sintética, se tiene lo siguiente:
pn(x) = (x2 - ux - )qn-2(x) + b1(x - u) + b0
donde: pn() = b1( - u) + b0 = b1( + j - 2) + b0
= + j
u = 2
pn() = (b0 - b1) + jb1
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
40
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
Por otro lado, siendo:
pn(x) = (x2 - ux - )qn-2(x) + (x - u)b1 + b0, entonces:
p’n(x) = (2x - u)qn-2(x) + (x2 - ux -)q’n-2(x) + b1, donde:
qn-2(x) = (x2 - ux - )n-4(x) + (x - u)c3 + c2
por lo que si es raíz del factor cuadrático (x2 - ux - ), entonces:
p’n() = (2 - ) ( - )c3 + c2 + b1
p’n() = (b1 - 22c3) + j(2c2 - 2c3)
Ejemplo:
Evaluar el polinomio p3(x) = x3 - 6x2 + 11x - 6 y su derivada en = 3 - j4.
donde: = 3
= -4
= 2 = 6
v = - 2 - 2 = -25
además: c3 = b3 = a3 = 1
a2 = -6
a1 = 11
a0 = -6
entonces:
b2 = a2 + b3 = - 6 + 6*1 = 0
c2 = b2 + c3 = 0 + 6*1 = 6
también:
b1 = a1 + b2 + vb3 = -14
b0 = a0 + b1 + vb2 = -90
por lo tanto, reemplazando los valores obtenidos en las fórmulas del polinomio y su primera
derivada, se tiene respectivamente lo siguiente:
p3(3 - j4) = (b0 - 3b1) - j4b1
= (-90 - 3(-14)) - j4(-14) = - 48 + j56
p’3(3 - j4) = (b1 - 2(-4)2c3) + j(2(-4)c2 - 2(3)(-4) c3)
= (-14 - 32) + j(-48 + 24) = - 46 - j24
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
41
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
4. SOLUCIÓN DE SISTEMA DE ECUACIONES
Se han desarrollado métodos directos para la solución de sistemas lineales, y métodos
iterativos para la solución de sistemas tanto lineales como no lineales.
Un sistema lineal de ecuaciones viene expresado en la siguiente forma:
E1: a11 x1 + a12 x2 + ....... + a1n xn = b1
E2: a21 x1 + a22 x2 + ....... + a2n xn = b2
:
:
En: an1 x1 + an2 x2 + ....... + ann xn = bn
En un sistema lineal, es posible aplicar una secuencia de operaciones que permitan
transformar al sistema original en otro que contenga el mismo conjunto de soluciones.
Las operaciones básicas, pueden ser las siguientes:
( Ei) (E’i) 0
(Ei + Ej) (E’i)
(Ei) (Ej) (E’i)
En forma matricial, un sistema lineal viene dado por:
a12 ........ a1n x1 b1
a11
a 22 ........ a 2n x 2 b2
a 21
a n2 ........ a nn x n bn
a n1
X
B
A
donde: AX = B A es una matriz cuadrada (#ecuaciones = # incógnitas)
X es un vector de incógnitas
B es un vector de términos independientes (B para solución única)
Por otro lado un sistema no lineal, viene expresado en la siguiente forma:
f1(x1, x2, ....... ,xn) = 0
f2(x1, x2, ....... ,xn) = 0
.
.
fn(x1, x2, ........ ,xn) = 0
F(X) =
donde: f1, f2, ......., fn se llaman funciones coordenadas de F.
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
42
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
4.1.
MÉTODOS DIRECTOS PARA LA SOLUCIÓN DE UN SISTEMA DE ECUACIONES LINEALES
Son métodos que proporcionan una respuesta en un número fijo de pasos y se hallan sujetos
fundamentalmente a errores de redondeo.
4.1.1. ALGORITMO DE ELIMINACIÓN GAUSSIANA
Es un método a través del cual se consigue triangularizar el sistema lineal, obteniéndose:
E1, : a11, x1 a12, x 2 a1, n x n b1,
E 2, :
,
a 22
x 2 a 2, n x n b2,
,
a nn
x n bn,
E n, :
Por lo tanto el sistema original: AX = B se transforma en AºX = Bº , donde:
Aº es una matriz triangular superior.
El proceso de triangularización paso a paso es el siguiente:
k = 0 Sistema original: n filas (i) y n columnas (j)
a110 a120 a130
0
0
0
a 23
a 21 a 22
0
0
0
a 31 a 32 a 33
0
0
0
a
n1 a n 2 a n 3
a10n x b10
1 0
0
a 2n x 2 b2
a 30n x 3 b30
0
0
x
bn
a nn
n
E10
E 20
E 30
E n0
k = 1 Eliminación de la primera columna (j = 1) a partir de la segunda fila (i = 2, 3, … )
Para: a110 0
a110 a120
1
0 a 22
1
0 a 32
0 a1
n2
a130 a10n x b10
1
1
a 23
a 21n x 2 b21
1
a 33
a 31n x 3 b31
1
1
x
bn
a n13 a nn
n
E10
E 21
E 31
E n1
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
43
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
a0
donde: Ei0 i01 E10
a11
E
1
i
para i = 2, 3, …., n
k = 2 Eliminación de la segunda columna (j = 2) a partir de la tercera fila (i = 3, 4, … )
a110 a120 a130
1
1
a 23
0 a 22
2
0 a 33
0
0
0 a n23
0
0
Para: a 22
a1
donde: Ei1 1i 2 E 21
a 22
E
2
i
a10n x b10
1
a 21n x 2 b21
a 32n x 3 b32
2
2
a nn
x n bn
E10
E 21
E 32
E n2
para i = 3, 4, …., n
Así, sucesivamente hasta completar con toda la triangularización del sistema lineal, esto es:
a110 a120 a130
1
1
a 23
0 a 22
2
0 a 33
0
0
0
0
Para: a kkk1 0
a k 1
donde: Eik 1 ikk 1 E kk 1
a kk
a10n x b10
1
a 21n x 2 b21
a 32n x 3 b32
n 1
n 1
a nn
x n bn
E
k
i
E10
E 21
E 32
E nn1
para: k = 1, 2, ….., n-1
i = k+1, k+2, ….., n
Ahora haciendo una sustitución hacia arriba, se tiene lo siguiente:
xn
1
a
x n 1
x n 2
n 1
nn
(bnn 1 )
1
a
n2
n 1,n 1
1
a
n 3
n 2 ,n 2
(bnn12 a nn12,n x n )
(bnn23 a nn23,n1 x n1 a nn23,n x n )
.
.
.
xi
1
(bii 1
i 1
aii
n
a
i 1
ij
xj )
para i = n-1, n-2, ….., 1
j i 1
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
44
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
k 1 a ikk1 k 1
Ei k 1 E k
a kk
Finalmente, según la expresión:
E
k
i
se deducen las siguientes expresiones válidas:
a ikk1 k 1
a a k 1 a kj
a kk
donde:
k 1
aik k 1
k
k 1
bi bi k 1 bk
a kk
k
ij
k 1
ij
k 1, 2, , n 1
i k 1, , n
j k , , n
RESUMEN: Solución de un Sistema Lineal AX = B
ENTRADA: n (# de ecuaciones = # de incógnitas), aij (coeficientes), bi
(términos independientes)
SALIDA:
ALGORITMO:
x1, x2, ….., xn ó mensaje de que el sistema lineal no tiene
solución única.
Considerar: A (a ij0 ) n*n
B (bi0 ) n*1
Para: k = 1, 2, ….., n-1
Probar sí: a kkk1 0
Hacer: i = k+1, k+2, ….., n
Hacer: j = k, k+1, ….., n
a k 1
Calcular: aijk aijk 1 ikk 1 a kjk1
a kk
a k 1
bik bik 1 ikk 1 bkk 1
a kk
Calcular: x n
1
a
n 1
nn
(bnn 1 )
Para: i = n-1, n-2, ….., 1
Calcular: xi
1
(bii 1
i 1
aii
n
a
i 1
ij
xj )
j i 1
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
45
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
Ejemplo: Resolver el sistema lineal, mediante Eliminación Gaussiana, usando aritmética de
redondeo a 2 cifras significativas.
4x1 + x2 + 2x3 = 9
2x1 + 4x2 - x3 = -5
x1 + x2 - 3x3 = -9
4 1 2 x1 9
2 4 1 x 2 5
1 1 3 x 3 9
X
B
A
Donde:
Considerando la matriz ampliada (AB) = C y efectuando operaciones consecutivas, se
tiene lo siguiente:
9
5
9
4 1 2
0
C 2 4 1
1 1 3
E10
E
1
2
0
0 a 21
E 2 0 E10
a11
0
0 a 31
E E 3 0 E10
a11
1
3
primera eliminacion
4
1
C 0
0
1
35
.
0.75
2 9.5
35
. 11
2
9
E10
E 21
a1 1
E 32 E 31 32
E
1 2
a
22
segunda eliminacion
4
C2 0
0
entonces: x 3
35
. 2 9.5
0 31
. 9
1
1 2
(b3 )
2
a 33
2
1
3.1
9
E 10
E 21
E 32
tercera eliminacion
( 9) 2.9
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
46
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
x2
1 1
1
x3 )
(b2 a 23
1
a 22
x1
1 0
(b1 a120 x 2 a130 x 3 ) 41 (9 ( 11
. ) 2(2.9)) 11
.
a110
1
3.5
( 9.5 2(2.9)) 11
.
La solución exacta del sistema es:
1
X 1
3
4.1.2. ALGORITMO DE GAUSS - JORDAN
Es un método basado en el de Eliminación Gaussiana. La matriz A es transformada en
matriz identidad, obteniéndose lo siguiente:
E1: x1 b1
E 2 : x 2 b2
E n x n bn
donde: AX = B
A’X = B’
A’ = I
Asumiendo el sistema original como sigue:
a110
0
a 21
0
a n1
a120
0
a 22
a n02
C110
a10n b10
0
a 20n b20
C21
0
0
bn0
a nn
C n1
Entonces: Para k = 1
1
0
C21
0
C n1
donde: C
1
1j
C121
C220
Cn02
C10j
C110
C120
C220
Cn02
C10n C10( n 1)
C20n C20( n1)
0
Cnn0 Cn( n1)
C0
Normalización de la primera fila (i = 1) con C110 0
C11n C11( n 1)
C20n C20( n1)
0
Cnn0 Cn ( n1)
para: j = 1, 2 , ..., n+1
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
47
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
Eliminación de elementos de la primera columna (j = 1) excepto el elemento de la
primera fila (i = 1)
1 C121 C11n C11( n1)
1
1
1
0 C22 C2 n C2 ( n 1)
1
1
1
C
0
C
C
n ( n 1)
n2
nn
donde:
Cij1 Cij0 C11j Ci01
C1
para: i = 2 , 3, ..., n
j = 1, 2, …, n+1
Para k = 2
Normalización de la segunda fila (i = 2) con C220 0
1 C121 C11n C11( n1)
2
2
0 1 C2 n C2 ( n1)
1
1
1
0 Cn 2 Cnn Cn ( n1)
2
2j
donde: C
1
0
0
C21 j
1
C22
para: j = 2 , 3, ..., n+1
Eliminación de elementos de la segunda columna (j = 2) excepto el elemento
de la segunda fila (i = 2)
0 C12n C12( n 1)
1 C22n C22( n 1)
2
0 Cnn2 Cn( n 1)
donde:
C2
Cij2 Cij1 C22 j Ci12
para: i = 1, 3, 4 , ..., n
j = 2, 3, …, n+1
Así, sucesivamente hasta completar con la eliminación de elementos.
En general se tiene lo siguiente:
Para: k = 1, 2, ...., n con Ckk( k 1) 0
(k )
Normalización: Ckj
Ckj( k 1)
Ckk( k 1)
j = k, k+1, ...., n+1
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
48
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
Eliminación: Cij
(k )
Cij( k 1) Ckj( k ) Cik( k 1)
i = 1, 2, 3, ...., n ( i k)
j = k, k+1, ...., n+1
Además: xi C
( n)
i ( n 1)
i =1, 2, ...., n
Cabe señalar que este método requiere de un mayor número de operaciones, respecto al de
Eliminación Gaussiana, por lo que los errores de aproximación serán mayores.
RESUMEN: Solución de un sistema lineal AX = B
ENTRADA: n (#de ecuaciones = # de incógnitas), Cij (Coeficientes de matriz
aumentada).
SALIDA: x1, x2, ...., xn o Mensaje de que el sistema lineal no tiene solución
única.
ALGORITMO:
Considerar: C(0) = (Cij( 0) ) nx ( n 1)
Para: k = 1, 2, ....., n
Probar si: ( Ckk( k 1) ) 0
Hacer: i = 1, 2 ,..., n (i k)
Para: j = k, k+1, ..., n+1
Calcular: C
(k )
kj
Ckj( k 1)
Ckk( k 1)
Cij( k ) Cij( k 1) Ckj( k ) Cik( k 1)
Para: i = 1, 2,...., n
Calcular:
X i Ci((nn)1)
Ejemplo: Resolver el sistema lineal mediante Gauss - Jordan, usando aritmética de
redondeo a 2 dígitos.
4 X 1 X 2 2 X 3 9
2 X 1 4 X 2 X 3 5
X X 3 X 9
2
3
1
4 1 2 9
C 2 4 1 5
1 1 3 9
Efectuando operaciones consecutivas de eliminación de elementos, se tiene lo siguiente:
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
49
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
Efectuando operaciones consecutivas de eliminación de elementos, se tiene lo siguiente:
4 1 2
0
C 2 4 1
1 1 3
9
5
9
E 10
E11 0
C11
E E
1
2
0
2
C210
0 E11
C11
C310
E 31 E 30 0 E11
C11
primera eliminacion
1
1
C 0
0
0.5 2.2
2.0 9.4
3.5
0.75 3.5 11
0.25
C121
E12 E11 1 E 22
C22
E 21
E 22 1
C22
1
C32
E 32 E 31 1 E 22
C22
segunda eliminacion
1
2
C 0
0
0.64 2.9
1 0.57 2.7
0 31
. 9
0
C132
E13 E12 2 E 33
C33
2 C232 3
E E2 2 E3
C33
3
2
E 32
E 2
33
C
3
3
tercera eliminacion
por lo tanto:
1
C3 0
0
0
1
0
.
0 10
.
0 10
1 2.9
x1 C143 10
.
donde:
x 2 C243 10
.
x 3 C343 2.9
4.1.3. ALGORITMO DE FACTORIZACIÓN
Es un método por medio del cual la matriz A se descompone en el producto de dos
matrices, una triangular inferior y otra triangular superior, así:
AX = B
A = LU, donde:
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
50
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
L lij
nxn
U U ij
entonces:
i 1,...., n 1
0
j i 1,...., n
l i 1,...., n
ij
j 1,...., i
nxn
i 1,...., n
uij
j i ,...., n
0 i 2,...., n
j 1,...., i 1
AX B
Matriz triangular inferior
Matriz triangular superior
LUX B , donde:
LY B Y
UX Y X
Así, entonces el método consiste en factorizar la matriz A y luego despejar de cada sistema
los vectores Y y X en forma consecutiva .
Por lo tanto:
a11
a 21
.
.
a n1
a12
.
.
a 22
.
.
.
.
an2
.
.
a1n l11
a 2 n l21
. .
. .
a nn ln1
0
.
.
l22
.
.
.
.
.
ln2
.
0 u11
0 0
. .
. .
lnn 0
u12
.
.
u22
.
.
.
.
.
.
0
u1n
u2 n
.
.
unn
según lo cual se tienen n2+n incógnitas y solamente n2 ecuaciones obtenidas al aplicar el
producto matricial, dado por:
n
aij =
l
k 1
ik
u kj
Bajo esta incompatibilidad, se asume uno de los siguientes criterios válidos:
a) l11 = l22 = ......... = lnn = 1
Criterio de DOOLITTLE
b) l11 = u11, l22 = u22,........., lnn = unn
c) u11 = u22 = ......... = unn = 1
Criterio de CHOLESKI
Criterio de CROUT
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
51
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
Asumiendo el criterio de DOOLITTLE, se tiene:
a11
a 21
.
.
a n1
a12
.
.
a 22
.
.
a1n 1
a 2 n l21
. .
. .
a nn ln1
.
.
an2
.
.
0
.
.
1
.
.
.
.
ln2
.
.
0 u11
0 0
. .
. .
1 0
u12
.
.
u22
.
.
.
.
.
.
0
u1n
u2 n
.
.
unn
donde:
a11 = u11
a12 = u12 ................................a1n = u1n
a21 = l21u11
.
.
an1 = ln1u11
a22 = l21u12 + u22 ....................a2n = l21u1n + u2n
.
.
an2 = ln1u12 +ln2u22 ................ann = ln1u1n + ln2u2n + .... + unn
Por lo tanto:
ai1
li1
u11
u a
1j
1j
i 2,............, n
además para: k = 2, ....., n
y
j 1,..........., n
ukk 0 , entonces :
k 1
1
i k 1,......, n
aik lim umk
lik
ukk
m 1
k 1
j k ,......, n
l km umj
u kj a kj
m 1
Por otro lado, según el sistema LY = B, se tiene lo siguiente:
y1 b1
i 1
yi bi lij y j
j 1
i 2,..., n
Finalmente, de acuerdo al sistema UX = Y, se tiene que:
1
x
(y )
n
unn n
x 1 y
i uii i
n
u
j i 1
ij
xj
i n 1,....,1
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
52
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
RESUMEN: Solución de un sistema lineal AX = B
ENTRADA: n (# de ecuaciones = # de incógnitas), aij (coeficientes), bi
(términos independientes).
SALIDA:
x1, x2, ....., xn ó Mensaje de que el sistema lineal no tiene solución
única:
ALGORITMO:
Considerar u11 = a11 0
Para: k = 2,...., n
Asumir: u1k = a1k
Calcular: lk1 = ak1 / u11
Para k = 2,...., n
Hacer: j = k,...., n
k 1
Calcular: ukj a kj lkm umj
m 1
Probar si: ukk 0
Hacer:
i = k + 1, ...., n
Calcular: lik
k 1
1
aik lim umk
ukk
m 1
Asumir: y1 = b1
Para: i = 2, ....., n
i 1
Calcular: yi = bi lij y j
j 1
Asumir: xn = yn / unn
Para: i = n-1,.......,1
1
y
Calcular: xi
uii i
n
x
ij j
u
j i 1
Ejemplo: Resolver el sistema lineal de ecuaciones mediante factorización
criterio de DOOLITTLE y aritmética de redondeo a 2 dígitos .
usando el
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
53
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
4 x1 x 2 2 x 3 9
2 x1 4 x 2 x 3 5
x x 3 x 9
2
3
1
4 1 2
A 2 4 1
1 1 3
donde:
4 1 2 1
2 4 1 l21
1 1 3 l31
así:
0
1
l32
0 u11
0 0
1 0
u12
u22
0
u13
u23
u33
a11 = 4 = u11
a12 = 1 = u12
a13 = 2 = u13
a21 = 2 = l21u11
a22 = 4 = l21u12 + u22
a23 = -1 = l21u13 + u23
a31 = 1 = l31u11
a32 = 1 = l31u12 + l32u22
a33 = -3 = l31u13 + l32u23 + u33
por lo que:
LY = B
1
0 0 y1 9
1 0 y 2 5
0.5
0.25 0.21 1 y 3 9
donde: y1 = 9
y2 = (-5 - 0.5y1) = -9.5
y3 = (-9 - 0.25y1 - 0.2y2) = -9.2
además: UX = Y
4 1
2 x1 9
.
0 35
2 x 2 9.5
. x 3 9.2
0 0 31
1
9.2 3.0
.
31
1
x2
9.5 2 x3 10.
35
.
1
x1 9 x 2 2 x 3 10
.
4
x3
donde:
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
54
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
4.1.4. PIVOTACIÓN
En los algoritmos analizados, se requiere efectuar divisiones para términos como akk 0 o
Ckk 0, los mismos que en los procesos numéricos deben ser de valores tales que no alteren
los resultados y se obtenga soluciones aceptables.
Así, si estos términos son de bajo valor, la división dará como resultado un valor alto, con el
consiguiente error de redondeo.
En los procesos numéricos se trata de evitar divisiones para términos de bajo valor, por ser
causantes de provocar acumulaciones excesivas de redondeo.
Entonces, es conveniente buscar términos de un valor relativamente alto, para evitar que el
error de redondeo rebase los límites permitidos.
El término de valor relativamente alto se llama PIVOTE y el proceso de búsqueda y
reordenamiento del pivote se llama PIVOTACIÓN.
La búsqueda y reordenamiento del pivote puede ser hecho de las siguientes formas:
Mediante movimiento de filas y columnas (Pivotación Completa).
Mediante movimiento de filas (Pivotación Parcial).
Para el caso de pivotación parcial, el pivote debe ser buscado dentro de la columna y
ubicado en el sitio donde se lo requiera.
El ejemplo expuesto a continuación pone de manifiesto el efecto de la pivotación.
Ejemplo: La solución exacta del sistema lineal es: x1 = 10 x2 = 1. Mediante Eliminación
Gaussiana, determinar la solución aproximada usando aritmética de redondeo a
4 dígitos y considerando: a) El arreglo original, b) Pivotación Parcial.
E1: 0.003000x1 + 59.14x2 = 59.17
E2: 5.291x1 - 6.130x2 = 46.78
a) a110 0.003000
0.003000 59.14 59.17
6130
46.78
.
5.291
E10
0
a 21
E E ( 0 ) E10
a11
1
2
0
2
5.291
0.003
1764
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
55
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
según lo cual se obtiene:
59.14 59.17
0.003000
0
104300104400
x 2 1.001
donde
x1 10
se puede observar que la solución no concuerda con la verdadera, esto se debe al valor alto
del término divisor.
b) PIVOTE: a 021 5.291 , para lo cual: E2 E1
Entonces:
6130
.
46.78
5.291
0
0.003000 59.14 59.17 E 1 E 0 ( a11 ) E 0
2
1
1
0
a 21
E 20
0.003
5.291
0.000567
según lo cual se obtiene:
x 2 1.000
donde
x1 10.00
5.291 6.13046.78
59.14 59.14
0
Esta solución concuerda con la verdadera, por lo tanto, la solución aceptable es la que se
aplica pivotación.
Una buena elección de la ecuación que contenga el verdadero PIVOTE, para cuando se
aplica pivotación parcial, se hace por medio de la técnica de PIVOTEO ESCALONADO
EN COLUMNA.
Básicamente esta forma de encontrar el verdadero PIVOTE, se aplica a S.E.L. cuyas
ecuaciones han sufrido alteraciones en su escala, perdiéndose de esa manera la referencia
común del Sistema.
Así, considerando:
i = 1, 2, …., n
Si = maxaij j = 1, ...., n
aik
entonces, siendo k la columna de pivotación, la relación: max
, indica que el pivote
si
esta en la ecuación Ei
Para el caso de Eliminación Gausiana se tiene:
k = 1, 2, …., n-1
i = k, …., n
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
56
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
Si = max aij
aik
entonces: max
si
j = k, ....., n
indica que el pivote está en la ecuación Ei en la columna k
en la cual se aplica pivotación.
Ejemplo: Resolver el sistema lineal mediante Eliminación Gausiana, aritmética de
redondeo a 4 dígitos y pivotación parcial.
E 1: 30.00 x1 591400 x 2 591700
E 2: 5.291x1 6.6130 x 2 46.78
0
= 30.00
a) PIVOTE a11
30.00 591400 591700
E10
0
a 21
.
46.78 1
5.291 6130
0
E 2 E 2 ( 0 ) E10
a11
según lo cual se obtiene:
30.00 591400 591700
104300104400
0
5.291
30.0
.
01764
x 2 1.001
donde
x1 10
0
se puede observar que la solución no concuerda con la verdadera, esto se debe a que a11
no
es un PIVOT VERDADERO.
b) Aplicando pivotación escalonada en la primera columna, se tiene:
E1:
S1 = max{30.00, 591400} = 591400
E2:
S2 = max{5.291, 6.130} = 6.130
donde:
a11
30.00
=
0.5073x10 4
591400
s1
a 21
5.291
=
0.8631
s2
6130
.
entonces:
a 11 a 21
0.8631, que indica que E2 tiene el pivote verdadero en la
max
,
S1 S 2
primera columna.
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
57
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
Por lo tanto, haciendo cambio de filas: E2 E1, se tiene:
.
46.78
E 20
5.291 6130
0
30.00 591400 591700 E 1 E 0 ( a11 ) E 0
1
1
2
0
a 21
30.0
5.291
5.670
según lo cual se obtiene:
.
46.78
5.291 6130
591400591400
0
x2 1.000
donde
x1 10.00
Esta solución concuerda con la verdadera, por lo tanto, la solución aceptable es la que se
aplica pivotación escalonada por columna.
Todo esto es justificable, puesto que la ecuación E1 es la misma que la del ejemplo anterior
afectada por el factor 104, lo cual no cambia la característica del sistema lineal, pero oculta
la verdadera referencia del Sistema de Ecuaciones.
4.1.5. SISTEMA DE ECUACIONES LINEALES MAL CONDICIONADO
Un sistema mal condicionado es aquel en el cual, al hacer ligeros cambios en los términos,
se provoca grandes diferencias en la solución.
El ejemplo que se desarrolla a continuación, muestra la característica de un sistema mal
condicionado.
Ejemplo: Determinar la solución de los sistemas, mediante factorización.
a)
10 x1 8 x 2 4.00003x 3 42.00006
6 x1 6 x 2 3.00001x 3 30.00002
6 x 4 x 2.00002 x 22.00004
1
2
3
b)
10 x1 8 x 2 4.00003x 3 42
6 x1 6 x 2 3.00001x 3 30
6 x 4 x 2.00002 x 22
1
2
3
Para los dos sistemas, se tiene lo siguiente:
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
58
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
10 8 4.00003 1 0 0 u11 u12 u13
6
6
3
.
00001
l
21
1
0
0
u
22
u
23
6 4 2.00002 l 31 l 32 1 0 0 u33
donde:
10 u11
6 l21u11
6 l31u11
8 u12
6 l21u12 u22
4 l31u12 l32 u22
4.00003 u13
3.00001 l21u13 u23
2.00002 l31u13 l32 u23 u33
entonces:
1
0
0
L 0.6
1
0
0.6 0.6666666667 1
10 8
4.00003
0.599992
U 0 1.2
6
0 0 3.333333x10
Así para el sistema a) se tiene que:
1
0
0 y 1 42.00006
1
0 y 2 30.00002
0.6
0.6 0.666... 1 y 3 22.00004
y1 42.00006
y 2 4.799984
y 3 6.666667 x106
10 8
42.00006
x 3 2.0000003
4.00003 x 1
4.799984 x 2 2.99999985
.
0.599992 x 2
0 12
6
x 1 1.0
0 0 3.33... x10 x 3 6.666667 x10 6
Para el sistema b) se tiene:
1
0
0
1
0
0.6
0.6 0.666... 1
y 1 42
y 1 42
y 2 30 y 2 4.8
y3 0
y 3 22
10 8
4.00003
.
0.599992
0 12
6
0 0 3.33... x10
x 1 42
x3 0
x 2 48 x 2 4
x1 1
x3 0
Según los resultados, se puede deducir que pequeños cambios en un sistema provocan
grandes diferencias en las soluciones. Por lo tanto el sistema resuelto es un sistema mal
condicionado (ILL - CONDITIONED).
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
59
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
4.1.6. ANÁLISIS DEL ERROR EN SISTEMAS DE ECUACIONES LINEALES
Es necesario hacer un análisis cuantitativo del error, para tener una idea clara del grado de
aproximación a la solución real .
Así, el sistema lineal: AX B , tendrá un vector solución aproximada Xa y un vector
solución real Xr, para lo cual se definen las siguientes condiciones:
E X r X a Vector de errores absolutos
AX a B Vector de errores residuales
Además, se tiene que: AX r B , con lo que al reemplazar en las definiciones anteriores
se llega a lo siguiente:
E A1
Por otro lado, para tener una idea del acercamiento entre vectores o matrices, es necesario
usar definiciones de NORMAS, con lo cual se puede hacer un análisis del error al trabajar
con vectores o matrices.
NORMA VECTORIAL
. que tiene las siguientes propiedades:
Es una función representada por
X 0
X R n
para
X 0 X 0
X X
R X R n
para
para R n
X Y X Y
Se definen 3 tipos de Normas Vectoriales que cumplen con las propiedades anteriores, esto
es:
n
Norma 1:
X
1
| xi |
Norma 2 ó Euclidiana:
Norma Infinito:
i 1
n
X
xi
1/ 2
2
E
i 1
X max | xi |
1 i n
Por lo tanto, los valores Xr Xa estarán cercanos entre sí a medida que X r X a sea de
un valor pequeño o lo suficientemente cercano a una tolerancia establecida.
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
60
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
NORMA MATRICIAL
Es una función correspondiente a la anterior con las siguientes propiedades:
A 0
A 0 A
A A
A B A B
AB A B
donde A B son matrices
En este caso las normas se definen de la siguiente manera:
Norma 1
A
1
m ax
1 j n
Norma Euclidiana: A
Norma Infinito: A
n
|a
E
i 1
ij
máximo de la suma absoluta de c/columna
|
n n
| a ij |2
i 1 j 1
1/ 2
n
m ax
1 i n
|a
j1
ij
|
máximo de la suma absoluta de c/fila
También, las matrices A B están cercanos entre sí, cuando A B es pequeña.
Por otro lado se define el NÚMERO DE CONDICIÓN de la matriz A mediante la siguiente
expresión:
Cond( A) || A|||| A 1 || || AA 1 ||
así, de acuerdo al tipo de norma, se tiene: || AA 1 ||1, 1 Cond ( A) 1
|| AA 1 || E n
Cond ( A) n
Ahora, retomando la expresión: E = Xr - Xa = - A-1 y aplicando NORMAS, se tiene:
|| X r X a || || A 1 |||| ||
También: A X r B
(1)
A || X r || B
1
|| X r ||
A
B
(2)
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
61
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
Multiplicando (1) (2) miembro a miembro se obtiene lo siguiente:
|| X r X a ||
|| ||
|| A|||| A 1 ||
|| B||
|| X ||
r Cond(A)
r
|| ||
COTA SUPERIOR DEL ERROR RELATIVO
entonces: r Cond( A)
|| B||
En general los límites o cotas del error relativo vienen dados por:
|| ||
|| ||
1
r Cond ( A)
Cond ( A) || B||
|| B||
La evaluación de estos límites o cotas de error dependen fundamentalmente del cálculo de
A-1, lo cual está sujeto a errores de redondeo dependientes del grado de precisión con que
se efectúen las operaciones matemáticas.
Se ha demostrado que usando aritmética de redondeo a t dígitos mediante Eliminación
Gaussiana, el vector residual para una aproximación Xa, viene dado por:
|| || 10 t || A|||| X a ||
además al considerar el sistema: - AE = , donde: E = Xr -Xa y asumiendo una solución
aproximada Ea, entonces:
1
E a A 1 A 1 AX a B
A
B A 1 AX a
X
r
Xa
por lo tanto: E a X r X a A 1 A 1
A 1 1 0 t A X a
10 t || X a || Cond ( A)
donde: Cond(A) 10t
Ea
Xa
relación que no depende del cálculo de A-1
Ejemplo: Determinar la cota superior del error relativo provocado en el sistema lineal
dado, mediante Eliminación Gaussiana y aritmética de redondeo a 5 dígitos.
3.3330 15920 10.333 x1 15913
2.2220 16.710 9.6120 x 2 28.544
.
.
.
51791
16852
15611
x 3 8.4254
Considerando el caso crítico en el que se provoque un mayor error, esto es sin hacer
pivoteo escalonado de columna, se tiene lo siguiente:
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
62
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
3.3330 15920 10.333 15913 3.3330 15920 10.333 15913
10596 16.501 10580
2.2220 16.710 9.6120 28.544 0
.
51791
.
16852
.
8.4254 0
74514
.
6.5250 7444.9
15611
3.3330 15920 10.333 15913
0
10596 16.501 10580
0
5.0790 4.7000
0
donde: X a
x 3 0.92538
x 2 0.99991
x1 12001
.
1.2001
15913
3.3330 15920 10.333 12001
.
Además: = AXa - B 2.2220 16.710 9.6120 0.99991 28.544
.
51791
.
16852
.
0.92538 8.4254
15611
0.00518
donde: 0.27413
.
018616
= 0.27413
Considerando el sistema lineal: AE = - y resolviendo mediante Eliminación Gaussiana y
aritmética de redondeo a 5 dígitos, se tiene:
3.3330 15920 10.333 0.00518
2.2220 16.710 9.6120 0.27413
.
51791
.
16852
.
018616
.
15611
donde: E a
Entonces:
0.20008
E a 8.9987 x10 5
0.074607
= 0.20008
Cond A 10 5
Ea
Xa
10 5
0.200078
16672
1.2001
con lo que la cota superior del error relativo viene dado por:
|| X r X a ||
|| ||
r Cond ( A)
|| X r ||
|| B||
0.27413
0.28720
r 16672
15913
También es posible obtener la cota superior del error relativo, mediante la expresión:
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
63
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
r || A | | || A 1 | |
donde: A 1
- 1.1701x10 -4
6.2782x10 -5
- 8.6631x10 -5
B
- 1.4983x10 -1
1.2124x10 -4
1.3846x10 -1
8.5416x10 -1
- 3.0662x10 -4
- 1.9689x10 -1
|| A 1 || 10041
.
además: A = 15934, entonces Cond(A) = (15934)(1.0041) = 15999, valor bastante
aproximado al anterior, por lo que no será necesario invertir la matriz A.
0.27413
0.27561
Finalmente: r 15999
15913
4.1.7. SISTEMA DE ECUACIONES LINEALES CON TÉRMINOS
COMPLEJOS
Considerando el modelo siguiente:
a11 jb11
a 21 jb21
a n1 jbn1
a12 jb12
a 22 jb22
a n2 jbn 2
a1n jb1n x1 j y1 c1 j d 1
a 2n jb2 n x 2 j y 2 c2 j d 2
a nn jbnn x n j y n cn j d n
Separando la parte real e imaginaria, se tiene:
a11 a12 a1n
a 21 a 22 a 2 n
a n1 a n 2 a nn
(aij )
b11 b12 b1n x1
b21 b22 b2 n x 2
j
bn1 bn 2 bnn x n
X
(bij )
y1 c1
y2
c2
j
y n cn
Y
C
d1
d2
j
dn
D
donde: [(aij) + j(bij)][X + jY] = [C + jD]
finalmente realizando operaciones matriciales y resumiéndolas en una forma matricial
ampliada, se tiene:
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
64
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
a
ij
b
ij
bij X
aij Y
C
D
Este último sistema, corresponde a un arreglo matricial con términos reales y puede ser
resuelto por cualquier método directo analizado.
4.1.8. INVERSIÓN DE MATRICES
Aplicando los criterios desarrollados para la solución de un sistema lineal de ecuaciones, es
posible realizar la inversión matricial.
Así, dado el sistema lineal: AX = B, la matriz A puede ser invertida manteniendo el mismo
modelo, esto es:
AA 1 I
a11
a 21
a n1
donde: AA-1 = A[X1, X2,
....,
a12
a 22
a n2
a1n x11
a 2n x 21
a nn x n1
X1
x12 x1n 1 0
x 22 x 2 n 0 1
x
0 0
n 2 x nn
X2
Xn
I1 I2
0
0
1
In
Xn ] = [I1, I2, ....., In]
Según lo cual, aplicando a cada uno de los métodos directos analizados, se tiene que:
Eliminación Gaussiana:
AA -1 = I
[A I] [C D]
donde: C es una matriz triangular superior
D es una matriz triangular inferior
Gauss - Jordan:
AA -1 = I
Factorización:
AA-1= I A = LU LUA-1 = I
[A I] [I A-1]
LY = I
UA-1 = Y
Ejemplo: Invertir la matriz A mediante los procesos directos de Eliminación Gaussiana,
Gauss - Jordan y Factorización; usando aritmética de redondeo a 2 dígitos.
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
65
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
1 2 3
A 1 0 2
2 1 3
Considerando: A
1
x11
x 21
x 31
x13
x 23 X 1
x 33
x12
x 22
x 32
1 0 0
I 0 1 0 I 1
0 0 1
I2
I3
X2
X3
a) Eliminación Gausiana:
1 2 3 1 0 0 1 2
3 1 0 0 1 2
3 1
0 0
1 0 2 0 1 0 0 2
5 1 1 0 0 2
5 1
1 0
. 0.5 15
. 1
2 1 3 0 0 1 0 3 9 2 0 1 0 0 15
1 2
3 x11 x12 x13 1
0
donde: 0 2
5 x 21 x 22 x 23 1
1
. x 31 x 32 x 33 0.5 15
.
0 0 15
X1 X2 X3
C
D1 D2
0
0
1
D3
Tomando los correspondientes elementos, se debe resolver cada uno de los sistemas:
CX 1 D1
CX 2 D2
CX 3 D 3
x 0.33
x 0.32
x 0.65
x 10
.
x 3.0
x 3.0
x 0.67
.
x 17
.
x 14
31
21
11
entonces:
A
1
32
22
12
donde:
33
23
13
0.65 3.0 13
.
17
.
0.32 3.0
. 0.67
0.33 10
b) Gauss - Jordan:
1 2 3 1 0 0
1 0 2 0 1 0
2 1 3 0 0 1
1 2
3 1 0 0
0 2
5 1 1 0
0 3 9 2 0 1
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
66
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
1 2
3 1
0 0 1 0 2.0 0
. 0
10
0.5 0
0 1 2.5 0.5 0.5 0 0 1 2.5 0.5
0 3 9 2 0 1 0 0 15
. 0.5 15
.
1
1 0 2.0 0 10
.
0 1 0 0 0.66 3.0 13
.
0 0 1 0 0.32 3.0
17
.
0 1 2.5 0.5 0.5
1 0.33 10
. 0.67 0 0 1 0.33 10
. 0.67
0 0
donde:
A
1
0.66 3.0 14
.
17
.
0.32 3.0
. 0.67
0.33 10
c) Factorización:
1 2 3 1 0 0 u11 u12 u13
1 0 2 l 21 1 0 0 u22 u23
2 1 3 l 31 l 32 1 0 0 u33
1
0 0
donde: L = 1 1 0
. 1
2 15
1 2
3
U = 0 2 5
.
0 0 15
además:
y11
Y = y 21
y
31
Y1
entonces:
También:
y12 y13
y 22 y 23
y 32 y 33
Y2 Y3
A
-1
x11
= x 21
x 31
X1
x12 x13
x 22 x 23
x 32 x 33
X2 X3
LY1 = I1
LY2 = I2
LY = I3
y11 = 1
y21 = 1
y31 = -0.5
y12 = 0
y22 = 1
y22 = 1.5
y13 = 0
y23 = 0
y33 = 1
UX1 = Y1
UX2 = Y2
UX3 = Y3
x31 = 0.33
x21 = -0.32
x11 = 0.66
x32 = -1.0
x22 = 3.0
x12 = -3.0
x33 = -0.67
x23 = 1.7
x13 = -1.4
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
67
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
Donde:
4.2.
A
1
0.66 3.0 14
.
0.32 3.0
17
.
. 0.67
0.33 10
MÉTODOS ITERATIVOS PARA LA SOLUCIÓN DE SISTEMAS DE ECUACIONES
Son métodos que partiendo de valores iniciales: X 1( 0) , X 2( 0) ,..... X n( 0) , se van consiguiendo
aproximaciones a la solución mediante procesos iterativos.
4.2.1. MÉTODOS ITERATIVOS PARA LA SOLUCIÓN DE SISTEMAS LINEALES
Son procedimientos que basados en el desdoblamiento de la matriz A, convierten al sistema
lineal AX B en un sistema equivalente de la forma:
X MX V
donde:
M matriz
V vector
Así, la sucesión de aproximaciones se genera a través de la expresión dada por:
X ( k ) M X ( k 1) V k 1,...... hasta que cumpla algún criterio de tolerancia
Por otro lado, la matriz A se desdobla en las matrices D, L U de la forma:
A D L U
D
L
U
matriz diagonal principal de A
matriz triangular inferior de A
matriz triangular superior de A
4.2.1.1. ALGORITMO DE JACOBI
Considera el sistema lineal: AX B D L U X B , donde:
DX L U X B
1
1
X
L
B
(
D
D
U
) X
VJ
MJ
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
68
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
Así, la expresión iterativa está dada por: X ( k ) M J X ( k 1) V J , donde:
MJ
VJ
además: k = 1, ..... hasta que: X
(k )
X
( k 1)
matriz de Jacobi
vector de Jacobi
a o también
X ( k ) X ( k 1)
X (k)
r
Mediante la interpretación del modelo matricial, el método de Jacobi consiste en despejar de
cada ecuación i-ésima la variable Xi . Entonces para aii 0, se tiene:
a x
b
x a a
n
i
i
ii
j 1
j i
ij
j
i 1,...., n
ii
cuya forma iterativa está dada por:
x
(k)
i
n
1
( k 1)
i 1,....., n
aii bi jj1i aij x j
RESUMEN: Solución de un sistema lineal AX B
ENTRADA: n (# de ecuaciones = # de incógnitas), aij (Coeficientes), bi
(términos independientes), X(0) (vector inicial), (tolerancia), T
(# máximo de iteraciones ) .
SALIDA: Solución aproximada x1, x2, ....., xn ó Mensaje de fracaso.
ALGORITMO:
Para: k = 1, ....., T
Hacer: i = 1, ....., n
Probar si: aii 0
Calcular:
x
(k)
i
n
1
( k 1)
aii bi jj 1i aij x j
Chequear si: X ( k ) X ( k 1) a o a su vez
X ( k ) X ( k 1)
X (k )
r
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
69
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
Resolver el sistema lineal mediante Jacobi, considerando X(0) = 0 y un error
relativo en Norma infinito < 10-3.
Ejemplo
E 1: 10 x1 x 2 2 x 3 6
E 2 : x1 11x 2 x 3 3x 4 25
E 3: 2 x1 x 2 10 x 3 x 4 11
E 4 : 3x 2 x 3 8 x 4 15
Despejando xi de cada ecuación Ei, se tiene lo siguiente:
1
6 x2 2 x3
10
1
25 x1 x 3 3x 4
x2
11
1
x3
11 2 x1 x 2 x 4
10
1
x 4 15 3x 2 x 3
8
x1
Así, la primera iteración vendrá dada por:
1
( 0)
( 0)
6 x 2 2 x 3 0.6
10
1
(1)
( 0)
( 0)
( 0)
x2 11 25 x1 x3 3 x4 2.2727
1
(1)
( 0)
( 0)
( 0)
x3 10 11 2 x1 x2 x4 11.
1
(1)
( 0)
( 0)
.
x4 8 15 3 x2 x3 1875
x
(1)
1
Las siguientes iteraciones provocan valores dados en la siguiente tabla:
k
(k)
x1
x2(k)
x3(k)
x4(k)
2
1.0473
1.7159
-0.8052
0.8852
3
0.9326
2.0533
-1.0493
1.1309
4
………
8
9
10
1.0152
1.0006 0.9997 1.0001
1.9537
1.9987 2.0004 1.9998
-0.9681
-0.9990 -1.0004 -0.9998
0.9739
0.9989 1.0006 0.9998
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
70
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
X (10) X ( 9 )
donde:
X (10)
8.0 x 104
4.0004 x 10 4 10 3
19998
.
entonces el vector solución es:
.
, 19998
.
, 0.9998, 0.9998
x (10) 10001
t
4.2.1.2. ALGORITMO DE GAUSS - SEIDEL
Se basa en las mismas características del algoritmo de Jacobi, esto es:
AX B D L U X B , donde:
D L X UX B
M G matriz de Gauss Seidel
1
1
X
D
L
U X
D
L
B
V G vector de Gauss Seidel
MG
VG
La expresión iterativa en este algoritmo viene dada por:
X ( k ) D1 L X ( k ) U X ( k 1) B k 1,.....
hasta que cumpla con una
condición de tolerancia.
La interpretación del modelo matricial iterativo, dice que se debe despejar de cada i-ésima
ecuación la variable xi y el cálculo numérico depende de valores actuales y valores
anteriores.
Entonces para aii 0, se tiene que:
x
(k)
i
i 1
1
(k )
b
a
i
ij x j
aii jj 1i
n
a x
j i 1
ij
( k 1)
j
i 1,..., n
RESUMEN: Solución de un sistema lineal AX B
ENTRADA: n (# de ecuaciones = # de incógnitas), aij (coeficientes), bi
(términos independientes), X(0)(vector inicial), (tolerancia),
T (# máximo de iteraciones).
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
71
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
SALIDA: Solución aproximada x1, x2 ,…, xn ó mensaje de fracaso.
ALGORITMO:
Para: k = 1, …, T
Hacer: i = 1, …, n
Probar si: aii 0
Calcular:
Chequear si:
x
(k)
i
i 1
1
(k )
b
aii i j 1 aij x j
j i
X ( k ) X ( k 1)
X ( k ) X ( k 1)
X (k)
Ejemplo:
a
n
a x
j i 1
ij
( k 1)
j
ó a su vez
r
Resolver el sistema lineal del ejemplo anterior, bajo las mismas condiciones
pero mediante Gauss - Seidel.
La primera iteración vendrá dada por:
x
=
1
10
(6 + x2( 0) - 2 x3( 0) ) = 0.6
x
=
1
11
(25 +
x
=
1
10
(-11 - 2 x1(1) + x2(1) + x4( 0) ) = - 0.9873
x
=
1
8
(1)
1
(1)
2
(1)
3
(1)
4
x
(1)
1
+ x3( 0) - 3 x4( 0) ) = 2.3272
(15 - 3x2(1) + x3(1) ) = 0.8789
Los valores obtenidos en las siguientes iteraciones, se presentan en la tabla:
k
(k)
x1
x2(k)
x3(k)
x4(k)
2
1.030
2.037
-1.014
0.9844
3
1.0065
2.0036
-1.0025
0.9983
X ( 5) X ( 4 )
donde:
X
( 5)
4
1.0009
2.0003
-1.0003
0.9999
5
1.0001
2.0000
-1.0000
1.0000
0.0008
4 x10 4 10 3
2.0000
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
72
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
4.2.1.3. CONDICIÓN DE CONVERGENCIA PARA LOS MÉTODOS
ITERATIVOS DE JACOBI Y GAUSS-SEIDEL EN SISTEMAS
LINEALES
Puesto que para ambos métodos la expresión matricial iterativa es del mismo modelo,
entonces se tiene que:
X ( k ) = MX ( k -1) + V
También:
X ( k 1) = MX ( k -2) + V
será una expresión válida.
Por lo tanto, restando las dos expresiones se tiene lo siguiente:
k)
( k 1)
( k 1)
)
X (
X
X ( k 2
)
X
M (
(
k
)
E
E ( k 1)
entonces el proceso va a la convergencia si: E (k) E (k-1)
por lo que:
E (k) M E (k-1) E (k-1)
donde:
M 1 condición de convergencia.
Jacobi: D-1 (L+U) 1
Gauss - Seidel: (D - L)-1 U 1
Para los dos métodos, el hecho de que M 1, implica que la matriz A deba ser de
DIAGONAL DOMINANTE, esto es que:
n
| aii | | aij | i 1, , n
j 1
j i
Así, en los ejemplos anteriores se puede observar esta última característica de convergencia.
Por otro lado, si la matriz A no es de diagonal dominante, en sistemas pequeños hay la
incertidumbre en la convergencia, mientras que en sistemas grandes definitivamente no hay
convergencia.
4.2.2. MÉTODOS ITERATIVOS PARA LA SOLUCIÓN DE SISTE MAS NO LINEALES
Son métodos basados en las características de punto fijo.
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
73
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
4.2.2.1.
ALGORITMO DE JACOBI
Dado el sistema no lineal F(X) = , se despeja de cada i-ésima función la variable xi, así :
f1(x1, x2, ..., xn ) = 0
x1 = g1(x2, x3 , ..., xn )
f2(x1, x2, ..., xn ) = 0
.
.
fi(x1, x2, ..., xn ) = 0
.
.
fn(x1, x2, ..., xn ) = 0
x2 = g2(x1, x3, ..., xn )
xi = gi(x1, x2, ..., xi -1, xi+1, ..., xn )
xn = gn(x1, x2, ..., xn-1 )
Cuya forma iterativa se resume en la expresión dada por:
X(k) = G(X(k-1)) k = 1,... hasta que cumpla con una condición de tolerancia.
Ejemplo: Resolver el sistema de ecuaciones no lineales mediante el algoritmo de Jacobi,
considerando X(0) = (0.1, 0.1, -0.1)t y un error absoluto en la Norma infinito
10-5 .
f 1 ( x1 , x2 , x3 ) = 3 x1 - Cos( x2 x3 ) - 0.5 = 0
f 2 ( x1 , x2 , x3 ) = x12 - 81( x2 + 01
. ) 2 + Sen( x3 ) + 1.06 = 0
10 3
f 3 ( x1 , x2 , x3 ) = e - x1 x2 + 20 x3 +
0
3
Despejando xi de cada ecuación fi, se tiene la primera iteración dada por:
x
x
x
(1)
1
= g1 ( x2( 0) , x3( 0) ) =
1
3
(1)
2
= g 2 ( x1( 0) , x3( 0) ) =
1
9
(1)
3
Cos( x2( 0)
x
( 0)
3
) +
1
6
= 0.49998333
1
( x1( 0) ) 2 + Senx3( 0) + 106
.
01
. 0.00944115
( 0) ( 0)
10 - 3
= g 3 ( x1( 0) , x2( 0) ) = - 201 e - x1 x2 = - 0.52310127
20
2
Los valores obtenidos en las iteraciones sucesivas se presentan en la siguiente tabla:
k
x1(k)
2 0.49999593
x2(k)
0.00002557
x3(k)
-0.52336331
x(k) - x(k-1)
2.3x10-4
3 0.50000000
0.00001234
-0.52359814
1.2x10-5
4 0.50000000
0.00000003
-0.52359847
3.1x10-7
5 0.50000000
0.00000002
-0.52359877
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
74
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
Por lo tanto el vector solución viene dado por:
X(5) = (0.50000000, 0.00000002, - 0.52359877) t
4.2.2.2. ALGORITMO DE GAUSS-SEIDEL
Se basa en las mismas características iterativas de Jacobi, con la diferencia de que el valor
actual depende de valores precalculados y valores anteriores.
Así, la forma iterativa se resume en la expresión dada por:
X(k) = G(X(k) , X(k-1) )
k = 1,... hasta que cumpla con una condición de
tolerancia.
Ejemplo: Resolver el sistema no lineal del ejemplo anterior, bajo las mismas condiciones
pero mediante Gauss - Seidel.
Despejando xi de cada función fi, se tiene la primera iteración dada por:
x
= g1 ( x2( 0) ,
x
x
= g 2 ( x1(1) ,
x
x
= g 3 ( x1(1) ,
x
(1)
1
(1)
2
(1)
3
( 0)
3
( 0)
3
(1)
2
) =
1
3
Cos( x2( 0)
) =
1
9
( x
(1)
1
x
( 0)
3
) +
1
6
= 0.49998333
) 2 + Senx3( 0) + 106
.
1
2
01
. 0.02222979
( 1) ( 1)
10 - 3
) = - 201 e - x1 x2 = - 0.52304613
20
Los valores de las siguientes iteraciones se presentan en la tabla:
k
x(k)
2 0.49997747
x2(k)
0.00002815
x3(k)
-0.52359807
x(k) - x(k-1)
2.8x10-5
3 0.50000000
0.00000004
-0.52359877
3.8x10-8
4 0.50000000
0.00000000
-0.52359877
Entonces, el vector solución será: X(4) = (0.50000000, 0.000000000, -0.52359877) t
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
75
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
4.2.2.3.
ALGORITMO DE NEWTON
Se vio que para el caso unidimensional, el método iterativo de Newton definía la función de
punto fijo dada por:
g( x ) = x -
f ( x)
f '( x )
Mediante un enfoque similar, si se tiene el caso n-dimensional (sistema de ecuaciones no
lineales), la función toma el siguiente modelo:
G ( X ) = X - F' ( X )]-1 F ( X )
donde: F’(X) = J(X)
por lo tanto:
Jacobiano (matriz de derivadas parciales)
G ( X ) = X - J -1 ( X ) F ( X )
cuyo proceso de iteración funcional, surge de seleccionar el vector inicial X(0) lo
suficientemente cercano a la solución y de que J-1(X) exista, con lo cual:
X ( k ) = G ( X ( k-1) ) = X ( k-1) - J -1 ( X ( k-1) ) F ( X ( k-1) )
donde:
f
f1
1
x n X ( k-1)
x1 X ( k-1)
J -1 ( X ( k-1) )
fn
fn
x
x
(
k1
)
(
k1
)
1 X
n X
1
Una debilidad clara del método de Newton, se presenta en la inversión del Jacobiano en
cada paso iterativo. Sin embargo se puede evitar dicha inversión., considerando el siguiente
procedimiento:
X ( k ) X ( k 1) J 1 ( X ( k 1) ) F ( X ( k 1) )
donde:
k)
( k 1)
1
( k 1)
X (
) F ( X ( k 1) )
X
J (X
Y ( k 1)
entonces:
J ( X ( k 1) )Y ( k 1) F ( X ( k 1) ) sistema lineal
además:
X ( k ) X ( k 1) Y ( k 1)
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
76
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
Ejemplo: Resolver el sistema no lineal del ejemplo anterior, considerando las mismas
condiciones, pero mediante Newton.
El Jacobiano estará dado por :
3
J ( X ) 2 x1
x2
x Senx x
x Senx x
162( x 0.1) Cosx
x x
xe
20
3
2
3
2
2
2
3
3
1 2
1
El modelo de la primera iteración vendrá dado por:
3
x3( 0) Senx ( 02)x3( 0) x2( 0) Senx2( 0) x3( 0) x1(1) x1( 0)
2 x1( 0)
x2(1) x2( 0)
.)
Cosx3( 0)
162( x2( 0) 01
(1)
( 0 ) ( 0)
( 0) ( 0 )
x x ( 0)
20
x1( 0) e x1 x2
x2( 0) e x1 x2
3
3
0
(
)
(
)
0
Y
J( X )
1
( 0)
( 0)
( 0)
3 x1 Cosx2 x3
2
. ) 2 Senx3( 0) 106
.
( x1( 0) ) 2 81( x2( 0) 01
e x1( 0 ) x2( 0 ) 20 x ( 0) 10 3
3
3
F ( X ( 0) )
donde los valores obtenidos en esta primera y consiguientes iteraciones vienen dados en la
tabla:
k
x
(k)
1
x
(k)
2
x
X ( k ) X ( k 1)
(k)
3
1
0.50003702
0.01946686
-0.52152047
2
0.50004593
0.00158859
-0.52355711
3
0.50000034
0.00001244
-0.52359845
4
0.50000000
0.0000000
-0.52359877
5
0.50000000
0.0000000
-0.52359877
1.79*10E-2
1.58*10E-3
1.24*10E-5
0
Entonces, el vector solución es :
X ( 5) (0.50000000 0.0000000 0.52359877) t
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
77
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
5. INTERPOLACIÓN (APROXIMACIONES)
Los tipos de Interpolación que se analizan son:
Interpolación Estadística
Interpolación Polinomial
La Interpolación Estadística considera n puntos o pares de valores (xi, yi) obtenidos como
resultado de algún proceso estadístico o de medición. Con dichos valores se define un
polinomio de grado m (m n) o una función f(x) que pase lo más cerca posible de los
puntos conocidos.
El gráfico de la figura muestra una nube de puntos y la tendencia expresada como un
polinomio o una función.
y
(xn, yn)
pm(x) ó f(x)
(xi, yi)
(x1, y1)
x
Este tipo de Interpolación permite la EXTRAPOLACIÓN.
Por otro lado, la Interpolación Polinomial se origina de una función tabulada (con un
relativo bajo número de valores) y trata de aproximarle a un polinomio de grado n que pase
por los n+1 puntos o pares de valores [xi, f(xi)] conocidos de la tabla.
El gráfico de la figura muestra un conjunto de puntos a través de los cuales pasa un
polinomio de interpolación.
y
[x2,f(x2)]
[x4,f(x4)]
p3(x)
[x3,f(x3)]
[x1,f(x1)]
x
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
78
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
Este polinomio pn(x) proporciona una fórmula para el cálculo de valores intermedios que no
constan en la tabulación inicial dada.
5.1. INTERPOLACIÓN ESTADÍSTICA
Las curvas de ajuste (polinomios o funciones) conllevan un error de aproximación, dado
por:
i = pm(xi) - yi
ó
i = 1, 2, …, n
i = f(xi) - yi
En este tipo de interpolación se trata de minimizar las máximas diferencias o diferencias
grandes (i ) entre el polinomio o la función y el valor de yi, para lo cual se define una
función de error cuadrático de aproximación, dada por:
n
F
2
i
i 1
El proceso de minimizar esta función se conoce con el nombre de los “MINIMOS
CUADRADOS”.
Por otro lado, si la aproximación es por medio de pm(x), la Interpolación Estadística toma el
nombre de “REGRESIÓN POLINOMIAL” y si la aproximación es a través de f(x) toma el
nombre de “REGRESION NO POLINOMIAL”.
Además se define el “COEFICIENTE DE REGRESIÓN”, dado por :
p
n
2
i 1
m
( xi ) y
y
n
i 1
i
y
2
2
,
2
f ( x ) y
n
ó
1 n
donde : y y i
n i 1
2
i
i 1
y
n
i 1
i
y
2
Finalmente se habla de la “BONDAD DEL AJUSTE” si se hace un gráfico del polinomio o
función, el cálculo de los errores de aproximación y el cálculo del Coeficiente de Regresión;
todos esto para tener una idea clara del modelo de aproximación utilizado.
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
79
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
5.1.1. REGRESIÓN POLINOMIAL
m
pm ( x ) a k x k , donde m n
Considerando al polinomio:
k 0
n
entonces:
F pm ( x i ) yi
i 1
2
Puesto que los ak son las incógnitas, entonces:
F
0 , proporcionará un sistema de m+1
aj
ecuaciones con m+1 incógnitas.
2
Por lo tanto:
m
F a k xik y i
i 1 k 0
donde:
n
m
F
2 a k x ik yi xij 0
a j i 1 k 0
n
n
entonces:
m
a
i 1 k 0
m
finalmente:
k
x
n
k j
i
a x
k 0
k
i 1
j 0,1,...., m
n
xi j yi
k j
i
i 1
n
j
x i yi
i 1
j 0,1,..., m
n
Desarrollando la última expresión y considerando , se tiene lo siguiente:
i 1
a 0 xi0 a1 xi1 a 2 xi2 ................ a m xim xi0 yi
a 0 xi1 a1 xi2 a 2 xi3 ................ a m xim1 xi1 yi
a 0 x im a1 xim1 a 2 xim 2 ................ a m xi2 m xim yi
cuya forma matricial viene dada por:
n
xi
m
xi
xi
xi2
...........
xi2
xi3
...........
xim1
xim 2 ...........
xim a 0 yi
xim1 a1 xi y i
m
x i2m a m xi y i
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
80
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
Este último sistema lineal puede ser resuelto por cualquier proceso analizado anteriormente,
sin embargo es conveniente que el grado del polinomio no sea alto, puesto que los
elementos de la matriz cada vez son más altos, por lo que hay riesgo de tener un error
considerable y el peligro de no llegar a la solución.
Se recomienda entonces que: m 4
m
RESUMEN: Ajuste de curvas mediante un polinomio pm ( x ) a k x k
k 0
ENTRADA: m (grado del polinomio), n (# de puntos), (xi , yi) pares de
valores de los n puntos.
SALIDA:
pm(xi), i i = 1, 2, ......, n
ALGORITMO: Para: j = 1, 2, ........, m+1
Considerar: aj-1
incógnitas
n
Calcular: b j xi j 1 yi
términos independientes
i 1
Hacer: k = 1, 2, ........, m+1
n
Calcular: C jk xik j 2
coeficientes
i 1
Resolver: Sistema lineal por cualquier método y obtener
las incógnitas ak.
Para: i = 1, 2,........, n
m
Evaluar: pm ( xi ) a k xik
k 0
Calcular: i pm ( x i ) y i
Como una aplicación particular, se tiene la REGRESIÓN LINEAL (m = 1), donde :
pm ( x ) a 0 a1 x
n
donde:
xi
xi
xi2
a 0 yi
a1 . xi y i
resolviendo el sistema, se obtiene:
xi2 yi xi xi yi
a0
n xi2 ( xi ) 2
a1
n xi yi x i y i
n xi2 ( xi ) 2
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
81
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
además se tiene que: 2
a 0 y i a1 xi yi
yi2
1
2
yi
n
1
2
yi
n
Ejemplo: Aproximar los puntos dados a una recta. Analizar la bondad del ajuste.
y
xi
1
yi
0.5
6
2
2.5
5
3
2
4
4
4
3
5
3.5
2
6
6
1
7
5.5
1
donde:
2
3
4
5
n=7
y 3.428
xi 28
yi 24
x i2 140
xi yi 119.5
7
entonces:
28
6
7
x
28 a 0
24
=
140 a1
119.5
7 28 24
7 28 24
Aplicando Eliminación - Gaussiana, se tiene:
~
28 140 119.5
0 28 23.5
donde:
a1 = 0.8393
a0 = 0.07143
por lo tanto: p1(x) = 0.07143 + 0.8393 x
—> ecuación de una recta.
La bondad del ajuste se puede analizar por medio de la siguiente tabla:
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
82
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
xi
yi
p1(xi)
1
2
3
4
5
6
7
0.5
2.5
2.0
4.0
3.5
6.0
5.5
24
0.911
1.75
2.59
3.43
4.27
5.11
5.95
7
28
i 2
0.1689
0.5625
0.3481
0.3249
0.5929
0.7921
0.2025
2.9919
[p1(xi)- y ]2
6.34
2.82
0.704
1.6x10-19
0.704
2.82
6.34
19.723
(yi- y )2
8.58
0.862
2.041
0.326
0.0051
6.612
4.291
22.714
1
p ( x ) y
7
=
2
donde:
1
i 1
2
i
=
7
(y
i 1
i
y) 2
19.723
= 0.86832
22.714
En la figura se representan tanto los puntos dados como aquellos correspondientes a la
regresión lineal..
Ejemplo: Ajustar los datos de la tabla a un polinomio de segundo grado (parábola).
Hacer el análisis de la bondad del ajuste.
xi
yi
n
xi
xi 2
xi
2
3
xi x i
donde:
así:
0.00001
1.0000
0.25
1.2840
0.5
1.6487
0.75
2.1170
1.0
2.7183
yi
xi 2 a 0
x i 3 a1 = x i y i
2
xi 4 a2
xi yi
n=5
xi 2.5
yi 8.768
x i 2 1875
.
xi yi 5.4514
x i 3 15625
.
x i 2 yi 5.7843
xi 4 13828
.
y 1.7536
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
83
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
8.768
2.5
1875
.
5
5.4514
.
15625
.
2.5 1875
4.4015
.
15625
.
13828
.
1875
entonces:
a 2 0.8437
a1 0.8641
a 0 10052
.
por lo tanto: p2(x) = 1.0052 + 0.8641x + 0.8437x2
ecuación de una parábola.
La bondad del ajuste se aprecia en la siguiente tabla y gráfico.
xi
yi
p1(xi)
0.00001
0.25
0.5
0.75
1.0
1.0000
1.2840
1.6487
2.1170
2.7183
8.768
1.0052
1.2740
1.6482
2.1279
2.7130
5
2.5
i 2
0.2704x10-4
1x10-4
0.25x10-6
0.11881x10-3
0.2809x10-4
0.27419x10-3
[p1(xi)- y ]2
0.5601
0.2300
0.01111
0.1401
0.9204
1.8618
(yi- y )2
0.5679
0.2205
0.0110
0.1321
0.9306
1.8621
i 1
donde: 2
18618
.
0.99984
18621
.
y
3
2
1
x
0.25 0.5
0.75 1.0
5.1.2. REGRESIÓN NO POLINOMIAL
Dependiendo de la tendencia que tenga la nube de puntos, será posible hacer
aproximaciones mediante funciones, sean estas del tipo exponencial, racionales,
trigonométricas, etc.
Así, si la tendencia es del tipo exponencial, se puede considerar los modelos siguientes:
f ( x ) Ae BX
f ( x ) AX B
, donde: A y B son incógnitas
Por ejemplo el tratamiento de una de estas funciones, puede ser el siguiente:
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
84
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
f ( x ) Ae BX
—>
donde: Y = a0 + a1 x
ln f ( x ) ln
A
Bx
a0 a1
Y
—> se trata de una regresión lineal, para lo cual:
a
A= e 0
B = a1
además en los cálculos se debe considerar que: Yi = ln yi
Ejemplo: A los terminales de una caja negra se mide la variación de voltaje en el tiempo,
obteniéndose los siguientes valores:
ti (s)
vi(V)
0
0
0.2
1.8
0.5
3.9
1.0
6.3
1.5
7.8
2
8.7
3
9.5
4
9.8
5
9.9
8
10.0
Ajustar dichos valores a una función del tipo: V = a + be-t.
n
Siendo a y b las incógnitas, entonces:
F=
(a be
i 1
donde:
ti
vi ) 2
n
dF
2 (a be ti vi ) 0
da
i 1
n
dF
2 (a be ti vi )e ti 0
db
i 1
por lo tanto:
así:
n
t
e i
e ti a vi
e 2 ti b e ti vi
n = 10
e ti 3.2268
vi 67.7
e 2 ti 2.2445
e ti vi 9.7972
entonces, resolviendo el sistema lineal, dado por:
3.2268 67.7
10
3.2268 2.2445 9.7972
b 10.0128
a 10.0009
por lo que: V = 10.0009 - 10.0128 e-t
además:
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
85
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
ti
vi
Vi
0
0
-0.0119
0.2
1.8
1.8031
0.5
1.0
1.5
2.0
3
4
3.9
6.3
7.8
8.7
9.5
9.8
3.9278 6.3174 7.7667 8.6458 9.5024 9.8175
5
9.9
9.9334
8
10.0
9.9975
2 0.999988
donde:
5.2. INTERPOLACIÓN POLINOMIAL
Se trata de aproximar una función f(x) tabulada a otras funciones de fácil manipulación,
como son: polinomios, funciones trigonométricas, exponenciales o racionales.
Siendo lo más usual el uso de polinomios, entonces dada una función tabulada [xi, f(xi)], se
construye un polinomio único pn(x) que pase exactamente por n+1 puntos, esto es:
pn(xi) = f(xi) fi —> i = 0, 1, ......, n
5.2.1. TÉCNICA MATRICIAL
n
Considerando: pn(x) = a k x k , donde
k 0
m in ( x i ) x m a x ( x i )
(lo cual no permite extrapolar).
Entonces, considerando n+1 pares de valores [xi, f(xi)], el polinomio único que pasa por
dichos puntos será:
n
a
k 0
k
xik f i
—>
i = 0, 1, ......, n
a 0 a1 x 0 a 2 x 02 ........ a n x 0n f 0
donde:
a 0 a1 x1 a 2 x12 ........ a n x1n f 1
a 0 a1 x n a 2 x n2 ........ a n x nn f n
cuya forma matricial viene dada por:
1 x 0 x 02 ........ x 0n
n
2
1 x1 x1 ........ x1
1 x n x n2 ........ x nn
a0 f 0
a1 f 1
an f n
MATRIZ DE VANDERMONDE
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
86
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
Debido a la forma de la matriz de potencias, es conveniente que n no sea alto, por lo que se
recomienda que n 4 .
n
RESUMEN: Aproximación mediante un polinomio interpolante pn(x) =
a
k 0
k
xk
ENTRADA: n (grado del polinomio), x0 (argumento de evaluación), [xi, f(xi)]
pares de valores de n+1 puntos.
SALIDA:
pn(x0)
ALGORITMO:
Para:
i = 1, 2, ......, n+1
Considerar: ai-1 —> incógnitas
bi = f(xi) —> términos independientes
Hacer:
j = 1, 2, ......., n+1
Calcular: Cij = xij-1
—> Coeficientes
Resolver: Sistema lineal por cualquier método y obtener las
incógnitas ak.
n
Evaluar: pn(x0) =
a
k 0
k
x 0k
Un caso particular de la Interpolación Polinomial es la llamada INTERPOLACIÓN
LINEAL (n = 1), donde:
p1(x) = a0 + a1x
entonces:
1 x0 a0 f 0
1 x1 a1 f 1
resolviendo el sistema se tiene:
a0
x1 f 0 x 0 f 1
x1 x 0
a1
donde: p1 x
x1 f 0 x 0 f 1 f 1 f 0
x
x1 x 0
x1 x 0
f1 f 0
x1 x 0
ecuación de una recta que pasa por
los puntos ( x 0 , f 0 ) ( x1 , f 1 )
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
87
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
Ejemplo: La función de BESSEL de primera clase de orden cero viene tabulada por los
valores en varios puntos. Mediante la definición de un polinomio interpolante de
primero y segundo orden, obtener el valor de la función en x = 1.5.
xi
f(xi)
1.0
0.7651977
1.3
0.6200860
1.6
0.4554022
1.9
0.2818186
Puesto que el polinomio a definirse debe ser evaluado en 1.5, entonces para n = 1, se
tendrá que:
x 0 13
.
x1 16
.
Para el caso n = 2, se tendrá que tomar tres puntos alrededor de 1.5, esto es:
Alternativa I: x0 = 1.0
x1 = 1.3
x2 = 1.6
Alternativa II: x0 = 1.3
x1 = 1.6
x2 = 1.9
Así, para INTERPOLACIÓN LINEAL, se tendrá: p1 ( x ) = a 0 + a 1 x , donde:
1 1.3 a 0 0.6200860
1 1.6 a1 0.4554022
a1 = - 0.548946
resolviendo se tiene:
a 0 = 1.333716
entonces:
p1 ( x ) = 1.333716 - 0.548946 x
p1 (1.5) = 1.333716 - 0.548946(1.5) = 0.5102908
Para INTERPOLACIÓN CUADRÁTICA, se tiene: p2 ( x ) = a 0 + a 1 x + a 2 x ² , donde:
1 x0
1 x1
1 x2
x0 2 a0 f 0
x12 a1 f 1
x2 2 a2 f 2
.
1.0 a 0 0.7651977
1 10
Alternativa I: 1 1.3 169
. a 1 0.620086
. 2.56 a 2 0.4554022
1 16
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
88
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
a 2 = - 0.1087339
a1 = - 0.2336177
a 0 = 1.107549
resolviendo se obtiene:
por lo tanto p2(1.5) = 1.107549 - 0.2336177(1.5) - 0.1087339(1.5)² = 0.5124715
1 13
. 169
. a 0 0.620086
Alternativa II: 1 16
. 2.56 a1 0.4554022
. 3.61 a 2 0.2818186
1 19
Resolviendo el sistema y evaluando el polinomio se obtiene: p2 (1.5) = 0.5112857
Finalmente, se sabe que el valor real de la función dada en 1.5 es: f(1.5) = 0.5118277, lo
cual permite concluir que en general, mientras mas alto es el grado del polinomio
interpolante, mejor será la aproximación.
5.2.2. POLINOMIO DE LAGRANGE
Otra forma de efectuar aproximaciones es mediante el uso del polinomio interpolante de
Lagrange.
El modelo del polinomio de interpolación viene dado por:
n
Pn ( x )
L
K 0
K
( x) f
K
x xj
donde: L K ( x )
j 0 x K x j
n
polinomio de Lagrange de grado n
jK
Puesto que el polinomio pasa por los n + 1 puntos, entonces:
Pn(xi) = fi
1
para lo cual: L K xi
0
i = 0, 1, ..., n
para
ik
para
i j
Al igual que en el modelo matricial (Vandermonde), también en este modelo de Lagrange,
el grado del polinomio no debe ser alto, así es conveniente que n 4.
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
89
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
Este método de interpolación por Lagrange, a más de permitir evaluar la función en valores
que no constan en la tabla min( xi ) max ( xi ) , se usa preferentemente cuando los xi
“no están IGUALMENTE ESPACIADOS”.
n
RESUMEN: Aproximación mediante un polinomio: Pn ( x )
L
K 0
K
( x) f K
ENTRADA: n (grado del polinomio interpolante), (argumento de
evaluación), [xi, f(xi)] pares de valores de n + 1 puntos.
SALIDA:
pn()
ALGORITMO:
Para: K = 0, 1, ........, n
Considerar:
f K f (xK )
xj
L K ( )
j 0 x K x j
n
Calcular:
jK
Calcular:
Pn ( )
n
L
K 0
K
( ) f K
Un caso particular es cuando: n = 1 (Interpolación Lineal por Lagrange), esto es:
1
P1 ( x )
L
K 0
K
( x ) f K L0 ( x ) f 0 L1 ( x ) f 1
x xj
x x1
donde: L0 ( x )
x 0 x1
j 0 x0 x j
1
j 0
x x j x x0
L1 ( x )
x1 x 0
j 0 x1 x j
1
j 1
entonces:
P1 ( x )
x x1
x x0
f0
f
x 0 x1
x1 x 0 1
donde presentando de otra forma, se tiene que:
P1 ( x )
x1 f 0 x 0 f 1 f 1 f 0
x
x1 x 0
x1 x 0
es un polinomio similar al obtenido
en el modelo matricial.
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
90
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
Todo esto implica que el polinomio de interpolación es único, premisa con la que se partió
para el análisis de interpolación polinomial.
Ejemplo:
Usando la función de Bessel tabulada, del ejemplo anterior, obtener
polinomios interpolantes de primero y segundo orden mediante el modelo de
Lagrange. Evaluar los polinomios en = 1.5
P1 ( x ) = L0 ( x ) f 0 + L1 ( x ) f 1 ; donde: xo = 1.3
x1 = 1.6
L0 x
x 16
.
1
x 16
.
13
. 16
.
0.3
L1 x
x 13
.
1
x 13
.
16
. 13
.
0.3
entonces:
fo = 0.620086
f1 = 0.4554022
p1 ( x ) = 1.333716 - 0.548946 x
p1 (1.5) = 0.5102968
P 2 ( x ) = L0 ( x ) f 0 + L1 ( x ) f 1 + L2 ( x ) f 2 ; donde:
Alternativa I: x0 = 1.0
x1 = 1.3
x2 = 1.6
fo = 0.7651977
f1 = 0.6200860
f2 = 0.4554022
Alternativa II: xo = 1.3
x1 = 1.6
x2 = 1.9
fo = 0.6200860
f1 = 0.4554022
f2 = 0.2818186
Alternativa I:
L0 ( x )
( x x1 )( x x 2 )
1
( x 13
. )( x 16
. )
( x 13
. )( x 16
. )
( x 0 x1 )( x 0 x 2 ) (10
. 13
. )(10
. 16
. ) 018
.
L1 ( x )
( x x 0 )( x x 2 )
1
( x 10
. )( x 16
. )
( x 10
. )( x 16
. )
0.09
( x1 x 0 )( x1 x 2 ) (13
. .10
. )(13
. 16
. )
L2 ( x )
( x x 0 )( x x1 )
1
( x 10
. )( x 13
.)
( x 10
. )( x 13
. )
( x 2 x 0 )( x 2 x1 ) (16
. 10
. )(16
. 13
. ) 018
.
donde: p2 ( x ) = 1.107549 - 0.2336177 x - 0.1081339 x ²
p2 (1.5) = 0.5124715
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
91
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
Alternativa II:
L0 ( x )
( x 16
. )( x 19
. )
1
( x 16
. )( x 19
. )
(13
. 16
. )(13
. 19
. ) 018
.
L1 ( x )
( x 13
. )( x 19
. )
1
( x 13
. )( x 19
. )
(16
. 13
. )(16
. 19
. )
0.09
L2 ( x )
( x 13
. )( x 16
. )
1
( x 13
. )( x 16
. )
(19
. 13
. )(19
. 16
. ) 018
.
donde: p2 ( x ) = 1.230874 - 0.4055603x - 0.04944333x ²
p2 (1.5) = 0.5112857
5.2.3. FÓRMULAS DE INTERPOLACIÓN DE NEWTON
Dependiendo de las características de los puntos [xi, f(xi)] tabulados, Newton ha
desarrollado fórmulas de Interpolación Polinomial, tanto para valores de xi con intervalo de
separación constante, como para cuando los valores de xi no mantienen un orden lógico ni
una separación constante.
5.2.3.1. DIFERENCIAS FINITAS
Concepto usado para definir un polinomio de interpolación en el caso en que los valores de
xi mantienen un orden lógico y una separación constante, esto es:
xi - xi-1 = h
puntos igualmente espaciados.
Las Diferencias Finitas se definen de la siguiente forma:
f ( x ) f ( x h) f ( x )
2 f ( x ) f ( x h) f ( x )
diferencias finitas de primer orden
diferencias finitas de segundo orden
‘
‘
‘
k f ( x ) k 1 f ( x h) k 1 f ( x )
Cambiando de notación y considerando:
diferencias finitas de k-ésimo orden
fi f(xi )
i = 0, 1,......, n
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
92
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
Se tiene: f ( xi ) f ( x i h) f ( xi ) f i f i 1 f i
f ( xi ) f ( x i h) f ( xi ) f i f i 1
.
.
.
2
2
i 0,1........, n 1
f i i 0,1......, n 2
k 2,3,...., n
k f ( xi ) k 1 f ( xi h) k 1 f ( xi ) k f i k 1 f i 1 k 1 f i
i 0,1,...., n k
Es posible resumir todas las Diferencias Finitas en una tabla como la siguiente:
xi
x0
fi
f0
x1
f1
x2
f2
x3
f3
.
.
.
.
.
.
fi
f0
f1
f2
2f i
2f 0
2f 1
3fi …………………. nfi
3f 0
nf 0
xn-3
fn-3
xn-2
fn-2
xn-1
fn-1
xn
fn
fn-3
fn-2
fn-1
2fn-3
2fn-2
3fn-3
Es importante notar que las Diferencias Finitas permiten calcular aproximaciones a las
derivadas de (x), puesto que según el Teorema del Valor Medio, se tiene que:
f ( x ) f ( x h) f ( x ) hf ( ), donde: x < < x + h
En general:
k f ( x ) h k f
k
( ), donde: x < < x + kh
RESUMEN: Cálculo de Diferencias Finitas de todos los órdenes
ENTRADA: n(# máx de orden ), [xi, (xi)] pares de valores de n+1 puntos
k 1,2,......, n
SALIDA : k f i
i 0,1,...., n k
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
93
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
ALGORITMO:
Considerar: o= (x0)
Para: i = 1, 2,……., n
Considerar: i = (xi)
Calcular: i-1 = i - i-1
Para: k = 2, 3,…….., n
Hacer: i = 0,1,…., n-k
Calcular: k f i k 1 f i 1 k 1 f i
x
Ejemplo: La función f ( x )
Cos( z ) dz , viene tabulada con los valores dados en la tabla.
0.1
Calcular todas las Diferencias Finitas de todos los órdenes.
xi
i
0.2
0.09944
0.3
0.19787
0.4
0.29479
0.5
0.38968
i
2i
3i
0.09843
-0.00151
0.09692
-0.00052
-0.00203
0.09489
Para desarrollar la Fórmula de Newton en función de las Diferencias Finitas, se parte de un
modelo de polinomio, dado por :
pn ( x ) C0 C1 ( x x 0 ) C2 ( x x 0 )( x x1 ) C3 ( x x 0 )( x x1 )( x x 2 )
+ Cn ( x x 0 )( x x1 ) ( x x n1 )
Ahora, partiendo del hecho de que el polinomio de interpolación es único, esto es:
pn ( xi ) f i
i 0,1,.........., n
entonces:
pn ( x 0 ) f o Co
pn ( x1 ) f 1 C0 C1 ( x1 x o )
pn ( x 2 ) f 2 C0 C1 ( x 2 x o ) C2 ( x 2 x o )( x 2 x1 )
pn ( x n ) f n C0 C1 ( x n x o ) C2 ( x n x o )( x n x1 ) C3 ( x n x o )( x n x1 )( x n x 2 ) .......
+ Cn ( x n x 0 )( x n x1 )...........( x n x n 1 )
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
94
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
Además, siendo que: xi xi 1 h , entonces
f 0 C0
f 1 C0 C1 (h)
f 2 C0 C1 (2h) C2 (2h 2 )
f 3 C0 C1 (3h) C2 (6h 2 ) C3 (6h 3 )
f n C0 C1 (nh) C2 (n)(n 1)h 2 C3 (n)(n 1)(n 2)h 3 ....... Cn (n! h n )
Despejando de cada i la correspondiente Ci y haciendo sustituciones sucesivas, se tiene:
C0 f 0
1
C1 ( f 1 f 0 )
h
1
1
C2 2 f 2 f 0 2( f 1 f 0 ) 2 ( f 2 2 f 1 f 0 )
2h
2h
1
1
C3 3 f 3 f 0 3( f 1 f 0 ) 3( f 2 2 f 1 f 0 ) 3 ( f 3 3 f 2 3 f 1 f 0 )
6h
6h
1
C4
( f 4 f 3 6 f 2 4 f1 f 0 )
4!h 4 4
Cn
1
n!h n
n(n 1)
n(n 1)(n 2)
n 2 n(n 1)
f
f
(
1
)
f 2 (1) n1 nf 1 (1) n f 0
f
nf
n
n
1
n
2
n
3
2!
3!
2!
Ahora, según el concepto de Diferencias Finitas, se tiene lo siguiente:
f 0 f 1 f 0
2 f 0 f 1 f 0 f 2 f 1 ( f 1 f 0 ) f 2 2 f 1 f 0
3 f 0 2 f 1 2 f 0 f 2 f 1 ( f 1 f 0 ) f 2 2 f 1 f 0 f 3 f 2 2( f 2 f 1 ) f 1 f o
f 3 3 f 2 3 f1 f 0
4 f 0 3 f 1 3 f o 2 f 2 2 f 1 ( 2 f 1 2 f o ) 2 f 2 2 2 f 1 2 f o f 4 4 f 3 6 f 2 4 f 1 f 0
n
n
n f 0 n 1 f 1 n1 f o n 2 f 2 2 n 2 f 1 n 2 f 0 ( 1) n f ( n k )
k
k 0
n
n!
donde
Coeficiente Binomial o Factorial de Newton.
k k !( n k )!
Según todo esto, los coeficientes Ci tendrán los siguientes modelos:
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
95
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
Co f 0
1
C1 f 0
h
1
C2 2 2 f 0
2h
1 3
C3
f0
3! h 3
1
C4
4 f 0
4 !h 4
1
n
Cn
n f0
n !h
Por lo tanto el polinomio de interpolación de Newton, toma la siguiente forma:
1
1
1 3
pn ( x ) f 0 ( x x 0 ) f 0 ( x x 0 )( x x1 ) 2 2 f 0 ( x x 0 )( x x1 )( x x 2 )
f 0
h
2h
3!h 3
1 n
( x x 0 )( x x1 )( x x 2 ) ( x x n 1 )
fo
n! h n
x x0
Considerando : s
, entonces:
h
x x1 x ( x 0 h) x x 0
1 s 1
h
h
h
x x 2 x ( x 0 2h) x x 0
2 s2
h
h
h
x x n1 x ( x 0 (n 1)h) x x 0
n 1 s n 1
h
h
h
Por lo tanto:
(x x0 )
( x x0 ) ( x x1 ) 2 f 0 (x x0 ) ( x x1 ) (x x2 ) 3 f 0
pn ( x) f 0
f 0
2
3!
h
h
h
h
h
h
( x x0 ) (x x1 ) (x x2 ) (x xn1 ) n f o
.
h
h
h
h
n!
2
3
f0
f0
n f o
s(s 1)(s 2)
s(s 1)(s 2)(s n 1)
pn ( x) f 0 sf 0 s(s 1)
2
3!
n!
n
s
entonces: pn ( x ) f 0 k f 0 FÓRMULA DE NEWTON
k 1 k
s s( s 1)( s 2).........( s k 1)
donde:
k!
k
n
También:
pn ( ) f 0 Ck k f 0
k 1
Ck
1 k 1
(s i )
k ! i 0
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
96
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
Según la fórmula, se puede evaluar el polinomio en un punto (min(xi) < < max(xi)), con
una precisión que se requiera, o a su vez se puede limitar el grado del polinomio según la
condición dada por:
S k
f 0 , donde: n = k-1
k
RESUMEN: Polinomio de Interpolación de Newton
ENTRADA: n(grado del polinomio), (argumento de evaluación), [xi, f(xi)]
pares de valores de n+1 puntos al inicio de la tabla alrededor de
.
SALIDA: pn()
ALGORITMO:
Calcular: Diferencias Finitas
x0
Considerar: s
x1 x 0
Para: k = 1, 2,….., n
1 k 1
Calcular: Ck ( s i )
k ! i 0
n
Calcular: pn ( ) f 0 Ck k f 0
k 1
Ejemplo:
Considerando la función tabulada del ejemplo anterior, determinar el valor de
(0.25) y (0.48) mediante un polinomio interpolante de Newton de segundo orden.
s
s
En general: p2 ( x ) f 0 f 0 2 f o
1
2
a) Para = 0.25 x0 = 0.2
x1 = 0.3
x2 = 0.4
además:
s
x 0 0.25 0.2
0.5
01
.
h
s s
0.5
1 1!
s s( s 1)
.
0125
2!
2
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
97
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
entonces: p2 (0.25) = 0.09944 + (0.5)(0.09843) + (-0.125)(-0.00151)
p2 (0.25) = 0.14884 f (0.25)
b) Para: = 0.48
s
además:
x0
h
0.48 0.3
18
.
01
.
s s
. ,
18
1 1!
entonces:
x0 = 0.3
x1 = 0.4
x2 = 0.5
s s s 1
0.72
2!
2
p2 (0.48) = 0.19787 + (1.8)(0.09692) + (0.72)(-0.00203)
p2 (0.48) = 0.37086 f (0.48)
5.2.3.2. DIFERENCIAS DIVIDIDAS
Concepto usado para definir un polinomio de interpolación en el caso en que los valores de
x i no mantienen un orden lógico ni una separación constante.
Las Diferencias Divididas se definen de la siguiente forma:
f [ xi , xi 1 ]
f i 1 f i
xi 1 xi
f [ xi , xi 1 , xi 2 ]
i 0,1,...., n 1
Diferencias Divididas de primer orden.
f [ xi 1 , xi 2 ] f [ xi , x i 1 ]
i 0,1,...., n 2 Dif. Div. de 2° orden.
xi 2 xi
f [ x i , xi 1 ,..., xi k ]
f [ xi 1 , xi 2 ,..., xi k ] f [ xi , xi 1 ,..., x i k 1 ]
x i k xi
Diferencias Divididas de k-ésimo orden.
para: i = 0, 1, ….., n-k
k 1
También: f [ x i , xi 1 ,..., xi k ]
j i
fi
k = 1, 2,…, n; i = 0, 1,..., n-k
k i
(x
mi
m j
j
xm )
Es posible resumir todas las Diferencias Divididas en una tabla como la siguiente:
xi
fi
f [xi , xi+1]
f [xi , xi+1 , xi+2] ………………
f [xi , xi+1 ,…., xi+n]
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
98
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
x0
f0
x1
f1
x2
f2
x3
f3
:
f [x0 , x1]
f [x0 , x1 , x2]
f [x1 , x2]
f [x1 , x2 , x3]
f [x2 , x3]
:
:
:
f [x0 , x1 , …. , xn]
xn-2
:
fn-2
xn-1
fn-1
xn
fn
f [xn-2 , xn-1]
f [xn-2 , xn-1 , xn]
f [xn-1 , xn]
RESUMEN: Cálculo de Diferencias Divididas de todos los órdenes.
ENTRADA: n (# máx. de orden), [xi, f(xi)] pares de valores de n + 1 puntos.
SALIDA: f [xi, xi+1 ,…., xi+n]
ALGORITMO:
k 1,2,..., n
i 0,1,..., n k
Para: i = 0, 1, ….., n
fi f(xi )
di i = fi
k = 1, 2, …, n
Considerar:
Para:
Hacer: i = 0, 1, …., n-k
Calcular: d i ,k i
d i 1, k i d i ,k i 1
x k i xi
Ejemplo: Una función viene tabulada con los valores dados en la tabla. Calcular todas las
Diferencias Divididas de todos los órdenes.
i
fi
1
0
f [xi , xi+1]
f [xi , xi+1 , xi+2]
f [xi , xi+1 , xi+3]
0.46209813
4
1.3862944
- 0.051873116
0.20273255
6
1.7917595
0.0078655415
- 0.020410950
0.18232160
5
1.6094379
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
99
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
La fórmula de Newton en función de las Diferencias Divididas, viene dada por:
pn(x)= f0+f [x0,x1](x-x0)+f [x0,x1,x2](x-x0)(x-x1)+...+f [x0,x1,…,xn](x-x0)(x-x1)…(x-xn-1)
n
k 1
k 1
j 0
También: pn ( x ) f 0 d 0, k ( x x j ) ,
donde:
d 0, k f [ x 0 , x1 ,..., x k ]
Ejemplo: Usando la tabla de diferencias del ejemplo anterior, determinar f(2) mediante un
polinomio interpolante de tercer orden.
Se tiene:
p3(x) = f0 + f [x0,x1](x-x0) + f [x0,x1,x2](x-x0)(x-x1) + f [x0,x1,x2,x3](x-x0)(x-x1)(x-x2)
dónde:
x0 = 1
x1 = 4
x2 = 6
x3 = 5
f0 = 0
f [x0,x1] = 0.46209813
f [x0,x1,x2] = -0.051873116
f [x0,x1,x2,x3] = 0.0078655415
entonces:
p3(2) = 0 + 0.46209813(2-1) + (-0.051873116)(2-1)(2-4) + (0.0078655415)(2-1)(2-4)(2-6)
p2(3) = 0.62876869
f (2)
5.2.4. ERROR EN EL POLINOMIO DE INTERPOLACIÓN
Al usar un polinomio de interpolación y evaluarlo en un punto ( xi < < xi+1 ), se tendrá
un error de aproximación o de interpolación más o menos considerable y que dependerá del
grado de dicho polinomio.
Así, la expresión básica del error, viene dada por:
donde: e n(x) = 0
x = xi
e n(x) 0
x xi ,
e n(x) = f(x) - pn(x)
para: i = 0, 1,…., n
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
100
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
Por otro lado, para el caso de una función, la expansión completa en Series de Taylor
presenta un término de error de truncamiento dado por:
en
f ( n 1) ( )
( x xi ) n 1
(n 1)! i 1
( xi < < xi+1 )
Una expresión similar se obtiene para un polinomio de interpolación de NEWTON de orden
n-ésimo, esto es:
f ( n 1) ( )
( x x 0 )( x x1 ).....( x x n1 )( x x n )
en
(n 1)!
mín
x < < max x
Para entender esta última expresión, es conveniente establecer una equivalencia entre las
Diferencias Finitas y Divididas, de la siguiente forma:
puesto que el polinomio interpolante es único, entonces se establecen las relaciones
dadas por:
f [x0,x1] =
1
f f ' ( )
h 0
f [x0,x1,x2] =
1
1
2
f ' ' ( )
2 f0
2 !h
2!
f [x0,x1,….,xn] =
1
1
n
f
n f0
n!
n !h
f [x0,x1,….,xn,xn+1] =
donde:
mín
(n)
( )
1
1
n 1
f0
f
n 1
(n 1)!
(n 1)! h
( n 1)
( )
x < < max x
n
Por lo tanto:
en f [ x 0 , x1 ,...., x n , x n1 ] ( x x j )
j 0
Según esto, se puede decir que el término de error viene dado por el término siguiente del
polinomio de Newton.
n
(
)
[
,
,...,
,
]
(x x j )
e
x
f
x
x
x
x
n
0
1
n
n 1
j 0
En resumen se tiene:
s n 1
s n1 n1
e ( x )
( )
h f
f0
n
n 1
n 1
ó también:
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
101
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
Ejemplo: En base a la tabla de Diferencias Divididas del ejemplo anterior, determinar el
error de un polinomio de interpolación de segundo orden en x = 2.
2
Entonces: e2 ( x ) f [ x 0 , x1 , x 2 , x 3 ] ( x x j )
j 0
dónde:
f [x0, x1, x 2, x 3] = 0.0078655415
x0 = 1,
por lo tanto:
x1 = 4,
x2 = 6
e2(2) = 0.0078655415(2 - 1)(2 - 4)(2 - 6) = 0.062924332
x
Ejemplo: La función: f ( x ) sen 2 (u)du viene tabulada con los siguientes valores:
0
xi
fi
0.1
0.0003326
0.2
0.0026454
0.3
0.0088393
0.4
0.0206609
0.5
0.0396321
a) Determinar un polinomio de interpolación de tercer grado, mediante el proceso
matricial de Vandermonde y eliminación Gaussiana con pivotación completa.
b) Determinar las cotas del error del polinomio interpolante, mediante Newton Horner para determinar las raíces.
a) El modelo del polinomio viene dado por: p3(x) = a0 + a1x + a2x2 + a3x3 entonces,
mediante Vandermonde se tiene:
1
1
1
1
x0
x 02
x1
x12
x2
x 22
x3
x 32
x 03 a 0 f 0
x13 a1 f 1
x 23 a 2 f 2
x 33 a 3 f 3
donde:
x0
x1
x2
x3
.
01
0.2
0.3
0.4
f0
f1
f2
f3
así, aplicando Eliminación Gaussiana se tiene:
pivot
1 01
. 0.01 0.001 0.0003326
. 0.01 0.001 0.0003326
1 01
0 01
. 0.03 0.007 0.0023128
0.0026454
1 0.2 0.04 0.008
0 0.2 0.08 0.026 0.0085067
1 0.3 0.09 0.027 0.0088393
.
0.063 0.0203283
0 0.3 015
.
0.064 0.0206609
pivot
1 0.4 016
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
102
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
1 01
.
0.01
0.001 0.0003326
.
0.063 0.0203283
0 0.3 015
pivot
0 0
0.02
0.014 0.0044633
0 0 0.02 0.016 0.0050455
1 01
. 0.01 0.001
0.063
0 0.3 015
.
0 0 0.02 0.014
0 0
0 0.002
0.0003326
0.0203283
0.0044633
0.0005822
donde: a3 = 0.2911
a2 = 0.019395
a1 = -0.0030675
a0 = 0.0001543
por lo tanto: p3(x) = 0.0001543 - 0.0030675 x + 0.0030675 x2 + 0.2911 x3
b)
Puesto que la expresión de error viene dada por:
e3 ( x )
f (( 4))
4!
3
(x x
j 0
j
) 01
. 0.4
entonces los límites del error pueden expresarse de la siguiente forma:
3
IV
min f ( x ) min
j 0
4!
asi:
3
(x x j )
IV
máx f ( x ) máx
e3 ( x )
(x x
j 0
j
)
4!
f I(x) = Sen2 (x)
f II(x) = Sen (2x)
f III(x) = 2 Cos (x)
f IV(x) = -4 Sen (2x)
min f ( x ) 0
x0
max f ( x ) 4
x 0.7854
IV
IV
Para este caso los valores de x están fuera del intervalo 0.1, 0.4 , por lo que es necesario
determinar el min y el máx de f (IVx ) usando el min y el máx local respectivamente, así :
min local: x = 0.1 min f IV(x) = 0.7947
max local: x = 0.4 maxf IV(x) = 2.8694
por otro lado:
3
(x x
j 0
j
) ( x 01
. )( x 0.2)( x 0.3)( x 0.4) x 4 x 3 0.35x 2 0.05x 0.0024
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
103
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
d 3
( x x j ) 0 4 x 3 3x 2 0.7 x 0.05
dx j 0
entonces:
donde, al aplicar Newton - Horner con: x0 = 0 (valor inicial), en la expresión:
x k 1
4 x k 3 3x k2 0.7 x k 0.05
xk
12 x k2 6 x k 0.7
se obtienen los siguientes resultados:
xk
ai
0.0714
0.1131
0.1326
0.1378
-0.05 -0.0138
0.7
0.5061
-3
- 2.7143
4
4
-0.0034
0.4120
-2.5478
4
-0.0006
0.3725
-2.4695
4
-0.00003
0.3625
-2.4487
4
entonces: 4x3 - 3x2 + 0.7x - 0.05 = (x - 0.1378)(4x2 - 2.4487x + 0.3625) = 0
donde las raíces son: xA = 0.1378
xB = 0.2507
xC = 0.3615, todas estas raíces están dentro del intervalo [0.1, 0.4]
3
por lo tanto:
(x
j 0
A
3
(x
j 0
x j ) 0.0001
B
x j ) 5.62 x10 5
C
x j ) 0.0001
3
(x
j 0
3
3
min ( x x j ) 10 4
donde:
máx ( x x j ) 5.62 x10 5
j 0
j 0
finalmente, los límites del error del polinomio interpolante, vienen dados por:
0.7947 x5.62 x105
2.8694 x104
e3 ( x )
4!
4!
186
. x10 6 e3 ( x ) 12
. x10 5
x
Ejemplo:
La función: f(x) =
e
u2
du viene dado por la siguiente tabla de valores:
0
xi
0.1
0.3
0.5
0.7
0.9
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
104
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
fi 0.09950 0.29078 0.46063 0.59997 0.70557
a)
a)
Determinar f(0.4) mediante un polinomio de interpolación de 3er orden que utilice
diferencias divididas.
b)
Estimar el error del polinomio de interpolación p3(0.4)
p3(x) = fo + fxo,x1(x-x0) + fxo,x1,x2(x-x0)(x-x1) + fxo,x1,x2,x3(x-x0)(x-x1)(x-x2)
fxi,xi+1
fi
xi
0.1 0.09950
fxi,xi+1,xi+2
fxo,x1,x2,x3
0.95640
0.3 0.29078
-0.26788
0.84925
0.5 0.46063
-0.18917
-0.38138
0.69670
0.7 0.59997
0.9 0.70557
entonces:
no utilizado
por no ser necesario
f(0.4) p3(0.4), donde:
p3(0.4) = 0.09950 + 0.95640(0.4 - 0.1) - 0.26788(0.4 - 0.1)(0.4 - 0.3) 0.18917(0.4 - 0.1)(0.4 - 0.3)(0.4 - 0.5)
p3(0.4) = 0.37895
b)
e3(0.4) = fx0, x1, x2, x3, x4 (0.4 - x0)(0.4 - x1)(0.4 - x2)(0.4 - x3 )
entonces:
xi
fi
0.1 0.09950
fxi,xi+1
fxi,xi+1,xi+2
fxo,x1,x2,x3
fxo,x1,x2,x3,x4
0.95640
0.3 0.29078
-0.26788
0.84925
0.5 0.46063
-0.18917
-0.38138
0.69670
0.7 0.59997
-0.0001
-0.18920
-0.40030
0.73673
0.4 0.37895
por lo tanto: e3(0.4) = -0.0001(0.4 - 0.1)(0.4 - 0.3)(0.4 - 0.5)(0.4 - 0.7)
e3(0.4) = - 9 x 10-8
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
105
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
6. DIFERENCIACIÓN E INTEGRACIÓN NUMÉRICA
Puesto que:
f(x) pn(x)
f ( x ) a p n ( x )
a
b
b
f ( x )dx pn ( x )dx
a
a
d
d
E D dx f ( x ) pn ( x ) a dx en ( x ) en (a )
a
b
b
E f ( x ) p ( x ) dx e ( x )dx
n
a n
I a
Además: en(x) = f(x) - pn(x)
Considerando: g n ( x ) f [ x 0 , x1 ,..... x n , x ] , entonces:
g n ( x)
Pero:
g n ( x x ) g n ( x )
lim
g n ( x , x x )
x 0
( x x ) x
x 0
lim
g n ( x , x x ) f [ x 0 , x1 ,........, x n , x , x x )]
también:
g´n(x) = lim fx0, x1,......, xn, x, x+x = fx0, x1,......, xn, x, x
x 0
por lo que se concluye que:
Por otro lado se tiene que:
y en consecuencia:
d
f [ x 0 , x1 ...., x n , x ] f [ x 0 , x1 ,...... x n , x , x ]
dx
f [ x 0 , x1 ,....., x n , x ]
f [ x 0 , x1 ,....., x n , x , x ]
f (( n)1)
(n 1)!
f (( n)2 )
(n 2)!
donde: , pertenecen al intervalo en el que se realiza la interpolación.
6.1. FÓRMULAS DE DIFERENCIACIÓN
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
106
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
n
d
d n
d
en ( x ) f [ x 0 , x1 ,...... x n , x ] ( x x j ) f [ x 0 , x1 ,....., x n , x ] ( x x j )
dx
dx j 0
dx
j 0
e n ( x ) f [ x 0 , x1 ,...... x n , x ]W ( x ) f [ x 0 , x1 ,..... x n , x , x ]W ( x )
e n ( x )
f (( n)1)
(n 1)!
W ( x)
f (( n) 2 )
(n 2)!
W ( x)
Así, se tiene:
en (a )
f ( n1) ( )
f ( n 2) ()
W (a )
W (a )
(n 1)!
(n 2)!
min xi ( , ) max xi
Esta última expresión se puede simplificar si se tienen puntos igualmente espaciados y si se
escoge “a” de tal forma que:
I) W(a) = 0
II) W ’(a) = 0
La primera condición W(a) = 0 se logra si: xi = a, para lo cual se tiene:
W ( x ) ( x x 0 )( x x1 )........( x xi 1 )( x a )( x xi 1 )........( x x n )
xa
( x a)
donde:
W ( x)
( x x 0 )( x x1 ) ( x xi 1 )( x xi 1 ) ( x x n ) Q( x )
xa
W ( x ) Q( x )( x a )
entonces:
W ( x ) = Q ( x )( x - a ) + Q( x )
por lo que:
W (a ) 0 W (a ) Q(a ) (a x 0 )(a x1 ) (a xi -1 )(a xi +1 ) (a x n )
por lo tanto:
en ( a )
f ( n 1) ( ) n
(a x j )
(n 1)! j 0
j i
La segunda condición W ’(a) = 0 se logra si n es impar, de manera que:
x0 , x1 , ............ ,
n 1
2
n
n 1
2
, ............., xn 1 , xn
a (simétrico a los xi)
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
107
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
a x 0 x n a
a x1 x n 1 a
a x 2 x n 2 a
entonces:
a x x a
k
n k
a x n2 1 x n n21 a
(*)
donde:
W ( x ) [( x x 0 )( x x n )][( x x1 )( x x n 1 )][( x x 2 )( x x n 2 )]...[( x x n 1 )( x x n n 1 )]
2
2
n 1
2
W ( x ) ( x x k )( x x n k )
k 0
a x k x n-k a
de (*)
x n - k 2a - x k
entonces: ( x x k )( x 2a x k ) ( x a ) 2 (a x k ) 2
n 1
2
por lo tanto: W (a ) (a x k ) 2 , con lo que se puede demostrar que W ’(a) = 0
k 0
n 1
2
( n 2 )
según lo cual:
en (a )
f
()
(a x k ) 2
(n 2)! k 0
6.1.1. PRIMERA DERIVADA
FÓRMULAS: (n = 1)
f ( x ) p1 ( x ) = f 0 f [ x 0 , x1 ]( x - x 0 )
f ( x ) p ( x ) = f [ x 0 , x1 ]
CASO I:
x0 a
x1 a + h
f ( x1 ) f ( x 0 )
x1 x 0
f (a )
f (a )
f ( x1 ) f ( x 2 )
x1 x 2
f ( a + h) - f ( a )
h
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
108
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
f ( ) 1
f ( )
f ( )
(a - x j )
(a - x1 )
(a - a - h)
2! j =0
2!
2
e1 (a) =
j0
e1 (a ) = -
CASO II:
h
f ( )
2
a < < a+h
x 0 a h
x 1 x 0 2h
x1 a h
f / (a )
f ( a h) f ( a h)
2h
f () 0
f ( )
f ( )
e1 (a ) =
(a - x k ) 2
(a - x 0 ) 2
( a - a + h) 2
3! k 0
3!
6
e1 (a ) = -
h2
f ( )
6
a- h a +h
FÓRMULAS: (n = 2)
f ( x ) p2 ( x ) f 0 f [ x 0 , x1 ]( x - x 0 ) f [ x 0 , x1 , x 2 ]( x - x 0 )( x - x1 )
f 0 2 f 0
f ( x ) p2 ( x ) f [ x 0 , x1 ] f [ x 0 , x1 , x 2 ][2 x - ( x 0 - x1 )] =
(2 x - x 0 x1 )
h
2h 2
f ( a )
f 0 2 f 0
(2a - x0 x1 )
h
2h 2
x0 a
CASO I: x1 a + h
x a + 2h
2
f 0 2 f
f 0 2 f 0
f (a )
2 ( 2a - a - a - h) =
h
h
2h
2h
donde: f (a)
e2 (a) =
2 f 0 2 f 0 2( f 1 f 0 ) ( f 2 2 f 1 f 0 )
2h
2h
3 f 0 4 f 1 f 2 3 f (a) 4 f (a h) f (a 2h)
2h
2h
f ( ) 2
f ( )
f ( )
(a x j )
(a x1 )(a x2 )
(a a h)(a a 2h)
3! j 0
6
6
j 0
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
109
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
e2 (a ) =
h2
f ( )
3
x0 a - h
CASO II: x1 a
x a + h
2
a a + 2h
f ( a)
donde: f (a )
e2 (a ) =
f 0 2 f 0
(2a - x0 - x1 )
h
2h 2
f 0 2 f 0
2 f 0 2 f 0
(
2
a
a
h
a
)
h
2h 2
2h
2( f 1 f 0 ) ( f 2 2 f 1 f 0 ) f 2 f 0
f (a h) f (a h)
2h
2h
2h
f ( ) 2
f ( )
f ()
(a x j )
(a x 0 )(a x 2 )
(a a h)(a a h)
3! j 0
6
6
j 1
h2
e2 (a ) = f ()
6
a -h a +h
OBSERVACIÓN: Para el CASO II (n = 2), tanto f (a ) como e2 (a ) son exactamente
los mismos que el CASO II con (n = 1), esto se debe a que los xi, se
hallan simétricamente espaciados respecto al “a”. Lo que se deduce,
que al usar puntos de interpolación simétricamente espaciados, se
obtienen fórmulas de “ORDEN SUPERIOR”.
Si se quiere diferenciar en el último punto de la tabla, así por ejemplo: x2 = a, x1 = a - h, x0 =
a - 2h, es necesario deducir otras fórmulas siguiendo el mismo proceso anterior.
6.1.2. SEGUNDA DERIVADA
f ( x ) = pn ( x ) en ( x )=pn ( x )+f [ x 0 ,x1 ,.........,x n ,x ]W ( x )
f ( x ) = pn( x ) f [ x 0 ,x1 ,.........,x n ,x ]W ( x )+f [ x 0 ,x1 ,..........,x n ,x ] W ( x )
pn( x ) f [ x 0 ,x1 ,.......,x n ,x ]W ( x )+2 f [ x 0 ,x1 ,......,x n ,x ]W ( x )+f [ x 0 ,x1 ,......,x n ,x ]W ( x )
f ( x ) = pn( x ) f [ x 0 ,x1 ,.......,x n ,x,x ]W ( x )+2 f [ x 0 ,x1 ,......,x n ,x,x ]W ( x )+f [ x 0 ,x1 ,......,x n ,x ]W ( x )
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
110
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
FÓRMULAS: (n = 2)
f (a ) p2( x ) f [ x 0 ,x1 ,x 2 ,a,a ]W ( a)+2 f [ x 0 ,x1 ,x 2 ,a,a ]W ( a )+f [ x 0 ,x1 ,x 2 ,a ]W ( a)
entonces: p2 ( x ) f 0 f [ x 0 ,x1 ]( x-x 0 ) f [ x 0 ,x1 ,x 2 ]( x-x 0 )( x-x1 )
f 0 f [ x 0 ,x1 ]( x-x 0 ) f [ x 0 ,x1 ,x 2 ]( x 2 ( x 0 x1 ) x+x 0 x1 )
donde: p2( x ) 2 f [ x 0 ,x1 ,x 2 ]
p2(a ) 2 f [ x 0 ,x1 ,x 2 ]
Por otro lado: W ( x ) = ( x-x 0 )( x-x1 )( x-x 2 )
W (a ) = (a - x 0 )(a x1 )(a - x 2 )
x 3 ( x 0 x1 x 2 ) x 2 ( x 0 x1+x 0 x 2+x1 x 2 ) x - x 0 x1 x 2
W (a ) = 3a 2 2( x 0+x1+x 2 )a+( x 0 x1+x 0 x 2+x1 x 2 )
W (a ) = 6a 2( x 0+x1+x 2 )
también:
4
( )
4!
f ()
f [ x 0 ,x1 ,x 2 ,a ] =
3!
f [ x 0 ,x1 ,x 2 ,a,a ] =
f
min x
( , ) max x
x0 a
CASO I: x1 a+h
x a+2h
2
f (a)=2 f x 0 ,x1 ,x 2 +f x 0 ,x1 ,.....,x n , x,x (a-a )(a-a-h)(a-a-2h)+
+2
f
( )
f ()
3a 2 2(3a 3h)a a (a h) a (a 2h) (a h)(a 2h)
6a 2(3a 3h)
4!
3!
( 4)
h 2 (4)
Simplificando, se tiene: f (a )=2 f [ x 0 ,x1 ,x 2 ]+
f ( ) hf ()
6
2 f 0
f 2 2 f1 f 0
f [ x 0 , x1 , x 2 ]
puesto que:
2
2h
2h 2
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
111
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
entonces:
f (a )
h2
e2 (a ) =
f
6
( 4)
f (a 2h) 2 f (a h) f (a )
h2
( )-hf ()
x0 a - h
CASO II: x1 a
x a+ h
2
+2
f
f (a )=2 f [ x 0 ,x1 ,x 2 ]+f [ x 0 ,x1 ,.....,x n , x,x ](a - a+h)(a - a )(a - a - h) +
( )
f ()
3a 2 2(a-h+a+a+h)a (a h)a (a-h)(a h)+a (a h)
6a 2(3a )
4!
3!
( 4)
Simplificando, se tiene: f (a ) = 2 f [ x 0 ,x1 ,x 2 ] -
entonces:
f (a )
e2 (a ) = -
h2
f
12
(4)
( )
f (a h) 2 f (a ) f (a-h)
h2
h2
f
12
(4)
( )
Ejemplo: Dada la función f(x) = ex , determinar f ´(0) y f ´´(0) para los siguientes valores
de h: 1, 0.1, 0.01, 0.001, 0.0001, 0.00001, mediante fórmulas que correspondan
a polinomios de 1ro o 2do grado y puntos simétricos.
Las fórmulas son:
f ( a h ) f (a h )
f (a )
2h
f ( a h ) 2 f ( a ) f (a h )
f (a )
h2
puesto que a = 0, entonces:
f (0)
f (0)
h2
ED ( f )
f ()
6
h2
ED ( f )
f
12
(4)
( )
f ( h) f ( h)
2h
f (h) 2 f (0) f ( h)
h2
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
112
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
entonces aplicando las fórmulas con cada valor de h, se obtiene lo siguiente:
h
1
0.1
0.01
0.001
0.0001
0.00001
f ´(0)
1.1752012
1.0016675
1.0000167
1.0000002
1.0000000
1.0000001
f ´´(0)
1.0861613
1.0008336
1.0000083
0.9999990
0.9999000
0.9900000
h2
por otro lado para h 0, entonces si: 0 f´´´() 1 E D ( f )
6
2
h
0 f (4)() 1 E D ( f )
12
x
Ejemplo: Dada la función g ( x ) e s ds , determinar:
2
0
a) g(0.1), g(0.3), g(0.5), por medio de la fórmula Compuesta del Trapecio y
considerando un h = 0.1.
b) g ( 01
. ) en base a los valores tabulados de a), mediante fórmulas que
involucren a todos los datos y provoquen el menor error.
a) Puesto que f ( s) e s , entonces según la fórmula Compuesta del Trapecio, se tiene:
2
para: a = 0, b = 0.1, h = 0.1
.)
g (01
m 1
. ) 01
. fi
f (0) f (01
i 1
.)
entonces: g (01
donde: m
0.1 0
0.1
1
0
2
01
. 0
. ) 01
. fi
f (0) f (01
e e ( 0.1) 0.09950
2
i 1
para: a = 0, b = 0.3, h = 0.1
m 1
g (0.3)
f (0) f (0.3) 01. f i
i 1
donde: m
0.3 0
0.1
3
2
2
2
0
e e ( 0.3) 0.1 e ( 0.1) e ( 0.2 ) 0.29078
para: a = 0, b = 0.5, h = 0.1
entonces: g (0.1)
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
113
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
g (0.5)
m 1
f (0) f (0.5) 01
. fi
i 1
entonces: g (0.1)
donde: m
0.5 0
0.1
5
0
2
2
2
2
2
e e ( 0.5) 0.1 e ( 0.1) e ( 0.2 ) e ( 0.3) e ( 0.4 ) 0.46063
b) Según los valores obtenidos, se tiene la siguiente tabla:
xi
gi
0.1
0.09950
0.3
0.29078
0.5
0.46063
La fórmula de Diferenciación que involucre todos los datos e implique el menor error viene
dada por:
n=2
xo = a = 0.1
x1 = a + h = 0.3
f (a )
4 f ( a h ) 3 f ( a ) f ( a 2h )
2h
x2 = a + 2h = 0.5
entonces:
g (01
.)
4 g (01
. ) g (0.5)
. 0.2) 3g (01
. ) g (01
. 0.4) 4 g (0.3) 3g (01
0.40399
2(0.2)
0.4
6.2. INTEGRACIÓN NUMÉRICA
b
b
Puesto que f ( x ) = Pn ( x ) + en ( x ) , entonces:
a
f ( x ) dx =
b
Pn ( x)dx +
e
a
a
n
( x ) dx
n
pero: en(x) = f [ x 0 ,x1 ,.....,x n ,x ] ( x-x j )
j =0
Si [a, b] [c, d] Intervalo de interpolación [ x 0 , x1 ,....., x n ]
n+1 puntos,
b
entonces:
EI =
f [ x 0 , x1 ,.....,x n , x ] W ( x )dx
a
donde, dependiendo del comportamiento de W(x), la integral pude tomar las siguientes
formas:
a) Si W(x) no cambia de signo en [a, b]
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
114
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
Puesto que f ( x 0 , y 0 , z0 ) 0.5 y 0 0.5 * 4 2 es continua en [a, b], se puede aplicar el
teorema del segundo valor medio de las integrales definidas, esto es:
=
y1 y 0 hf ( x 0 , y 0 , z0 ) 4 0.5 * ( 2) 3
g ( x 0 , y 0 , z0 ) 4 01
. y 0 0.3z0 4 01
. * 4 0.3 * 6 18
.
(a, b)
z1 z0 hg ( x 0 , y 0 , z0 ) 6 0.5 * 18
. 6.9
donde: EI
=
f ( x1 , y1 , z1 ) 0.5 y1 0.5 * 3 15
. y 2 y1 hf ( x1 , y1 , z1 ) 3 0.5 * ( 15
. ) 2.25
(c, d) c < < d
b) Si W(x) cambia de signo en [a, b]
Eligiendo el punto xn+1 [a, b], con lo cual se tiene la siguiente identidad:
g ( x1 , y1 , z1 ) 4 01
. y1 0.3z1 4 01
. * 3 0.3 * 6.9 163
.
z2 z1 hg ( x1 , y1 , z1 ) 6.9 0.5 * 163
. 7.715
h
y i 1 yi [ K 1 2( K 2 K 3) K 4]
donde:
=
6
K 1 f ( x i , y i , zi )
=
h
z i 1 z i [ L 1 2 ( L 2 L 3 ) L 4 ]
+
6
para lo cual:
EI =
+ K 2 f ( x h , y h K 1, z h L1)
i
i
i
L1 g ( xi , yi , zi )
2
2
2
En este caso es posible hacer simplificaciones, pero un caso particularmente deseable ocurre
cuando:
b
W(x)dx = 0
a
entonces:
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
115
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
EI
=
h
h
h
K 3 f ( x i , y i K 2 , zi L 2 )
h
h
h
2
2
2
L 3 g ( x i , y i K 2 , zi L 2 ) +
2
2
2
K 4 f ( xi h, yi hK 3, zi hL 3)
así:
EI =
L 4 g ( xi h, yi hK 3, zi hL 3)
n
Si se escoge el punto x n+1 de tal manera que V ( x) ( x xn 1 )
( x x j ) no cambie de signo en [a,
j 0
b], entonces de acuerdo al teorema del segundo valor medio de las integrales definidas, se tiene que:
Donde:
6.2.1. FÓRMULAS BÁSICAS
a.
Eligiendo
Puesto que x [a,b] W(x) 0
entonces: W(x) no cambia de signo en [a, b}
Por lo tanto:
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
116
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
A esta fórmula se le conoce con el nombre de fórmula del RECTÁNGULO, cuya interpretación geométrica
viene dada por el gráfico
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
117
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
b. Eligiendo
puesto que
entonces: W(x) cambia de signo en [a, b]
Según lo cual se tiene
por lo tanto
Ahora se debe elegir x1 para que V(x) no cambie de signo.
Así, eligiendo: x1 = x0 V(x) = (x – x0) 0 x [ a,b ]
Entonces:
reemplazando los límites y reduciendo términos semejantes se llega finalmente a la expresión:
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
118
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
FORMULA DEL PUNTO MEDIO
entonces
eligiendo
pueso que
entonces:
W(x) 0, x [ a,b] no cambia de signo.
Por lo tanto:
simplificando la expresión se llega a lo siguiente:
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
119
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
En cuanto al error se tiene que:
reemplazando los límites y reduciendo términos semejantes, se tiene:
Eligiendo
Entonces
por lo tanto W(x) cambia de
signo en [a, b]
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
120
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
b
Según esto se puede demostrar que: W ( x) dx 0 , con lo que la expresión de error vendrá dada por:
a
Ahora se debe elegir x para que V(x) no cambie de signo.
Así, eligiendo:
Entonces
realizando la
siguiente expresión:
integración se llega finalmente a la
Ahora para evaluar p1(x), se usa una combinación de las fórmulas de punto medio y del trapecio, asociadas
a p2(x)
Entonces sumando I + ½ II, se tiene:
Puesto que: p2 (1 ) k p2 ( 2 ) k , por ser un polinomio de grado 2, entonces:
''
''
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
121
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
b
a
p 2 ( x ) dx
2
(b a ) p 2
3
p
a b
2
2 (a)
p2 (b )
4
Además p2(x) interpola a f(x) en los puntos: a ,
ab
2
y b, por lo que:
p2 a 2 b f a 2b
p2(a) = f(a)
p2(b) = f(b)
b
así, entonces:
f ( x )dx
a
b
f ( x )dx
a
(b a )
6
(b a ) f
3
2
f a 4 f b , donde:
a b
2
( )
( )
f (a) 4 f f (b) FÓRMULA BÁSICA DE SIMPSON 1/3
a b
2
f(x)
parábola
b
p
2
( x )dx
a
x
a
6.2.2.
ab
2
b
FÓRMULAS COMPUESTAS
Puesto que las fórmulas desarrolladas anteriormente dependen de (b - a), entonces si este es
muy grande también los errores serán considerables, por lo que es conveniente más bien
dividirle en subintervalos más pequeños e iguales.
así:
xO = a
x1 = a + h
.
.
xi = a + ih
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
122
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
.
.
xm = a + mh = b
ba
es el número de subintervalos correspondientes a los (m+1) puntos.
donde: m =
h
xi - xi-1 = h
además:
Por tanto, en cada subintervalo se pueden aplicar cualquiera de las “fórmulas básicas”, esto
es:
xi
xi
xi 1
xi 1
b
m
xi
i 1
xi 1
f ( x)dx p
donde:
f ( x )dx
a
xi
( x )dx
n
en ( x )dx
xi 1
m
pn ( x )dx E I i
i 1
a) Utilización de la fórmula básica del Rectángulo:
xi
pn ( x )dx ( xi xi 1 ). f ( xi 1 )
xi 1
xi
x
en ( x )dx
i 1
f '(i )
( xi xi 1 ) 2
2
i (xi-1, xi)
Puesto que: xi = a + ih
xi
xi-1 = a + (i - 1)h
fi-1 f(xi-1)
pn ( x )dx hf i 1
xi 1
xi
xi 1
b
Por lo tanto:
m
f ( x)dx hf
i 1
a
m
i 1
i 1
en ( x )dx
f '(i ) 2
h
2
f ' (i ) 2
h
2
Si f ´(x) es continua en [a, b] y en base al teorema del valor medio para las integrales
definidas, pero aplicándolo en forma discreta a un sumatorio, se tiene que:
b
m
a
i 1
f ( x)dx h
h2
f i 1 f ' ( n )
i 1 2
m
(a, b)
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
123
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
b
m
f ( x )dx h f i 1 f ' ( )
i 1
a
b
donde:
mh 2
2
m=
ba
h
m
f ( x )dx h f i 1
FÓRMULA COMPUESTA DEL RECTÁNGULO
i 1
a
f '()
(b a ) h
2
b
EI =
además:
e
n
( x )dx
a
(a, b)
f(x)
xi
pn ( x)dx
xi 1
x
a
h
b
b) Utilización de la fórmula básica del Punto Medio:
xi
f ( x)dx ( x
i
xi 1 ) f
x
xi 1
b
donde:
f ( x)dx hf
a
m
m
i 1
i 1/ 2
x
i i 1
2
i 1
f ''(24 ) ( x x
f ' ' (i ) 3
h
24
i
i
i 1
)3
f i 1/ 2 f
x
x
i i 1
2
Usando nuevamente una modificación del teorema del valor medio para integrales definidas
y si f ”(x) es continua en [a, b], se tiene:
b
m
f ( x)dx h f
a
b
donde:
a
i 1
i 1/ 2
mh 3
f ' ' ()
24
m
ba
h
m
f ( x )dx h f i 1/ 2
FÓRMULA COMPUESTA DEL PUNTO MEDIO
i 1
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
124
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
b
además:
EI =
e
n
a
( x )dx
f ''()
(b a )h 2
24
=> (a, b)
f(x)
xi
pn ( x)dx
xi 1
x
a
h
b
c) Utilización de la fórmula básica del Trapecio:
xi
f ( x )dx
xi 1
m
m f ' ' (i ) 3
h m
f ( x )dx f i 1 f i
h
i 1 12
2 i 1
i 1
b
donde:
f ''(i )
1
( x i xi 1 )( f i 1 f i )
( x i xi 1 ) 3
2
12
a
m
f
pero:
i 1
i 1
f0 + f1 + f2 + ...... + fm-2 + fm-1
m
f
i 1
i
m
entonces:
f
i 1
b
así:
a
f1 + f2 + ...... + fm-1 + fm
m
i 1 f i f 0 + 2(f 1 + f 2 + ..... + f m-1 ) + f m = f 0 + f m + 2
i 1
m 1
f
i 1
i
m 1
m
f ' ' (i ) 3
h
f ( x )dx ( f 0 f m ) h f i
h
2
12
i 1
i 1
Aplicando los mismos criterios anteriores y además: f0 = f(a) y fm = f(b), se tiene:
b
a
m 1
m
h
h3
f ( x )dx [ f (a ) f (b)] h f i f ' ' ()
2
i 1
i 1 12
(a, b)
m 1
h
donde: f ( x )dx [ f (a ) f (b)] h f i FÓRMULA COMPUESTA DEL TRAPECIO
2
i 1
a
b
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
125
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
b
además:
EI =
e
n
( x )dx
a
f ''( )
(b a ) h 2
12
(a, b)
d) Utilización de la fórmula básica de SIMPSON 1/3:
Siguiendo un proceso similar a lo hecho con las otras fórmulas básicas, mediante el uso de
la fórmula básica de Simpson 1/3, se llega a la siguiente FÓRMULA COMPUESTA DE
SIMPSON 1/3, dada por:
b
a
m2
m 1
h
f
a
f
b
f
f i 1/ 2
(
)
(
)
2
4
f ( x )dx
i
3
i 2 ,4 ,...
i 1, 3,...
f IV ()
h
EI =
(b a )
2
180
además:
4
(a, b)
x
Ejemplo: Dada la función g ( x ) e s ds y en base a los valores tabulados, determinar
2
0
0.5
g ( x)dx
mediante fórmulas que involucren a todos los datos y provoquen el
0.1
menor error.
xi
gi
0.1
0.09950
0.3
0.29078
0.5
0.46063
Las fórmulas que involucren a todos los datos e impliquen el menor error, vienen dadas por:
xo = a = 0.1
x1 a 2 b 0.3
b
f ( x)dx
a
ba
6
f (a ) 4 f (
a b
2
) f (b) Fórmula de Simpson 1/3
x2 = b = 0.5
0.5
donde:
g ( x)dx 0.56 0.1 g(0.1) 4 g(0.3) g(0.5) 0.11488
0.1
También, mediante la fórmula Compuesta del Trapecio, se tiene:
m 1
b
f ( x)dx f (a) f (b) h f
h
2
a
i 1
i
m 0.50.20.1 2
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
126
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
0.5
donde:
.
g ( x)dx 02.2 g (01. ) g (0.5) 0.2 g (0.3) 0114169
0.1
7. SOLUCIÓN NUMÉRICA DE ECUACIONES DIFERENCIALES
ORDINARIAS DE PRIMER ORDEN
Una solución de una Ecuación Diferencial Ordinaria (EDO) es una función específica de
la variable independiente y de los parámetros. Así por ejemplo la EDO de primer orden
dada por:
dy
xy
dx
donde: y es la variable dependiente
x es la variable independiente
tiene una solución:
y 2e x x 1
para las condiciones (x0 = 0, y0 = 1)
Por otro lado, una EDO de segundo orden puede transformarse en un Sistema de
Ecuaciones Diferenciales Ordinarias (SEDO) de primer orden, así por ejemplo:
d2y
dy
A2 2 A1
A0 y 0
dx
dx
dy
considerando: z
dx
entonces:
A2
dz d 2 y
dx dx 2
dz
A1 z A0 y 0
dx
A
A
dz
1 z 0 y
dx
A2
A2
por lo tanto, se tiene el SEDO dado por:
dy
dx z
dz Cz Dy
dx
cuyas condiciones iniciales son (x0, y0, z0)
En general se trata de resolver una EDO de la forma:
dy
f ( x, y)
dx
cuya solución general está dada por: y = F(x)
Una EDO de este tipo, asocia con cada punto (xi, yi), la existencia del gradiente dado por:
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
127
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
dy
dx
f ( xi , yi )
xi , yi
siempre y cuando f(x, y) sea continua y uniforme en el intervalo de los puntos (xi, yi).
7.1.
MÉTODO DE EULER
y
y = F(x)
yi+1
verdadero
yi01
predicho
yi
x
xi
xi+1
La ecuación de la pendiente en (xi, yi) viene dado por:
dy
dx
por otro lado, si:
xi , yi
y yi
f ( xi , yi )
x xi
y yi01
x x i 1
y yi ( x xi ) f ( xi , yi )
y i 1 yi01 yi ( xi 1 xi ) f ( xi , yi )
Generalizando las aproximaciones para un intervalo [a, b] en el que los xi mantienen una
separación consecutiva de un valor h, entonces:
y i 1 yi hf ( x i , yi )
donde: f(xi, yi) corresponde a la EDO evaluada en (xi, yi)
Ejemplo: Determinar la solución analítica y numérica de la EDO dada por
y , 4e 0.8 x 0.5 y , en el intervalo [0, 4] con un h = 0.5
Considerar las condiciones iniciales:
La solución analítica viene dada por: y
4
1.3
x0 0
y0 2
(e 0.8 x e 0.5x ) 2e 0.5x
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
128
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
Mientras que el proceso numérico está dado por:
f ( xi , yi ) 4e 0.8 xi 0.5 y i
yi 1 yi hf ( xi , yi )
Algunos pasos se presentan a continuación:
(x0, y0) = (0, 2)
f ( x 0 , y 0 ) 4e 0.8 x0 0.5 y 0 f (0,2) 4e 0.8*0 0.5 * 2 3
y1 y 0 hf ( x 0 , y 0 ) y1 2 0.5 * 3 3.5
(x1, y1) = (0.5, 3.5)
f ( x1 , y1 ) 4e 0.8 x1 0.5 y1 f (0.5,35
. ) 4e 0.8*0.5 0.5 * 3.5 4.217
y 2 y1 hf ( x1 , y1 ) y 2 3.5 0.5 * 4.217 5.609
(x2, y2) = (1.0, 5.609)
f ( x 2 , y 2 ) 4e 0.8 x2 0.5 y 2 f (1.0,5.609) 4e 0.8*1.0 0.5 * 5.609 6.098
y 3 y 2 hf ( x 2 , y 2 ) y 3 5.609 0.5 * 6.098 8.658
La tabla presenta los resultados mediante el cálculo analítico y el proceso numérico:
xi
0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
Analítico
2.0
3.7515
6.1946
9.7070
14.844
22.427
33.677
50.412
75.339
EULER
2.0
3.5
5.6086
8.6576
13.133
19.756
29.595
44.243
66.071
% error relativo
0
6.7
9.46
10.81
11.52
11.91
12.12
13.24
12.3
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
129
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
80
70
Amplitud
60
50
Analítico
40
EULER
%error
30
20
10
0
0
0.5
1
1.5
2
2.5
3
3.5
4
Intervalo
Conclusiones: Mientras más pequeño es el h el error será menor. Sin embargo pueden haber
casos de inestabilidad, donde exista un crecimiento del error.
7.2.
MÉTODO MODIFICADO DE EULER
Determina un gradiente o pendiente en xi y otro en xi+1 , luego obtiene el promedio de
estos gradientes, dando como resultado una mejor aproximación al gradiente obtenido por
el método simple de Euler en el intervalo (xi, xi+1).
pendiente = f ( x i 1 , yi01 )
y
y = F(x)
pendiente promedio
yi+1
pendiente = f ( xi , yi )
y
o
i 1
yi
x
xi
xi+1
El esquema representa a un modelo PREDICTOR - CORRECTOR
Así, el gradiente en xi será:
yi, f ( xi , y i )
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
130
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
para lo cual se tiene: y i01 yi hf ( xi , y i )
Ecuación predictora
Además el gradiente en xi+1 viene dado por: y i,1 f ( xi 1 , yi01 )
según lo cual el gradiente promedio será:
por lo tanto:
y i 1 y i
donde: y i 1 yi
yi, y i,1
f ( xi , yi ) f ( x i 1 , yi01 )
2
2
h
f ( xi , yi ) f ( x i 1 , yi01 )
2
h
f ( xi , yi ) f ( xi 1 , yi hf ( xi , yi ))
2
Ecuación correctora
Ejemplo: En base al modelo de la EDO del ejemplo anterior, determinar la solución
numérica mediante el método modificado de Euler.
proceso numérico:
f ( xi , yi ) 4e 0.8 xi 0.5 yi
0
yi 1 yi hf ( xi , y i )
f ( xi 1 , y i01 ) 4e 0.8 xi 1 0.5 yi01
y y h f (x , y ) f (x , y0 )
i
i
i
i 1
i 1
i 1
2
A continuación se desarrollan algunos pasos del proceso numérico.
(x0, y0) = (0, 2)
f ( x 0 , y 0 ) 4e 0.8 x0 0.5 y 0 4e 0.8*0 0.5 * 2 3
0
y1 y 0 hf ( x 0 , y 0 ) 2 0.5 * 3 3.5
f ( x1 , y10 ) 4e 0.8 x1 0.5 y10 4e 0.8*0.5 0.5 * 3.5 4.2173
y y h f ( x , y ) f ( x , y 0 ) 2 0.5 3 4.2173 3.8043
0
0
0
1
1
2
1
2
(x1, y1) = (0.5, 3.8043)
f ( x1 , y1 ) 4e 0.8*0.5 0.5 * 3.8043 4.0651
0
0.5 * 4.0651 5.8369
.
y 2 38043
0
0.8*1.0
0.5 * 5.8369 5.9837
f ( x 2 , y 2 ) 4e
y 38043
02.5 4.0651 5.9837 6.3165
.
2
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
131
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
(x2, y2) = (1.0, 6.3165)
f ( x 2 , y 2 ) 4e 0.8*1.0 0.5 * 6.3165 5.7439
0
y 3 6.3165 0.5 * 5.7439 9.1885
0
0.8*1.5
0.5 * 9.1885 8.6857
f ( x 3 , y 3 ) 4e
y 6.3165 0.5 5.7439 8.6857 9.9239
2
3
Así sucesivamente, hasta completar con el intervalo de análisis.
La tabla, que se presenta a continuación, resume todo el proceso numérico. Se presentan
los resultados analíticos y aquellos obtenidos mediante Euler y Euler Modificado; además se
presentan los errores relativos porcentuales para cada método.
xi
Analítico
Euler
0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
2.0
3.7515
6.1946
9.7070
14.844
22.427
33.677
50.412
75.339
2.0
3.5
5.6086
8.6576
13.133
19.756
29.595
44.243
66.071
EULER
MODIFICADO
2.0
3.8043
6.3165
9.9241
15.196
22.976
34.515
51.677
77.238
% error rela- % error relativo
tivo Euler
E. Modificado
0
0
6.7
1.41
9.46
1.97
10.81
2.24
11.52
2.37
11.91
2.45
12.12
2.49
13.24
2.51
12.3
2.52
Por otro lado, en el caso de EDO polinomiales, por ejemplo:
f ( x , y ) 2 x 3 12 x 2 20 x 8.5 , se puede aplicar el modelo dado por:
y i 1 yi
7.3.
h
f ( xi ) f ( xi 1 )
2
MÉTODOS DE RUNGE - KUTTA
Estos métodos tienen la exactitud del esquema de la Serie de Taylor sin necesidad del
cálculo de derivadas de orden superior.
El modelo general viene dado por:
donde: ( xi , yi , h)
y i 1 yi ( xi , yi , h)h
es una función de incremento y puede interpretarse como el promedio
de la gradiente en un intervalo (xi, yi).
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
132
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
a1 K1 a 2 K 2 a n K n
Así,
donde los
a son constantes y los K vienen dados por:
K1
K 2
K3
K n
i
i
f ( xi , yi )
f ( xi p1h, yi q11 K1h)
f ( xi p2 h, y i q 21 K1h q 22 K 2 h)
f ( xi pn h, yi q n1,1 K1h q n 1, 2 K 2 h q n 1,n 1 K n 1h)
Como se observa, las Ki son relaciones recurrentes.
son determinados eligiendo el valor de n y
Por otro lado, los valores de ai , pi y qi , j
comparando y i 1 yi (a1 K1 a 2 K 2 a n K n )h con y i 1 yi ( xi , yi , h)h , donde
se expande en Series de Taylor de orden n.
Así, la ecuación y i 1 yi ( xi , yi , h)h con la función expandida en Series de Taylor,
viene dada por:
h2
y i 1 yi f ( xi , yi )h f ' ( x i , yi )
(h 3 )
2
término de error
( x i , y i , h) f ( x i , y i ) f ' ( x i , y i )
donde:
h
2
(h
)
2
término de error
f '( xi , y i )
además:
f f dy
dy
f ( xi , y i )
dx
x y dx
También la expansión en Series de Taylor de la función f ( xi , yi ) viene dada por:
f ( xi , yi ) f ( xi , yi )
f
f
2
(h
)
x
y
término de error
Por lo tanto, para n 1, se tiene lo siguiente:
y i 1 yi f ( xi , yi )h Serie de Taylor de primer orden
También:
y i 1 yi a1 K1h K1 f ( x i , yi )
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
133
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
Comparando, la Serie de Taylor de primer orden con la última expresión obtenida, se tiene
que a1 = 1, por lo que:
y i 1 yi f ( xi , yi )h
Método de Euler
Para n 2 :
y i 1
f f dy h 2
yi f ( xi , yi ) h (
)
x y dx 2
Serie de Taylor de segundo orden
K1 f ( xi , yi )
por otro lado: y i 1 yi (a1 K1 a 2 K 2 )h
K 2 f ( xi p1h, y i q11 K1h)
donde: f ( xi p1h, yi q11 K1h) f ( x i , yi ) p1h
f
f
q11 K1h
x
y
por lo que: yi 1 yi a1 K1h a 2 K 2 h
f
y i a1h f ( xi , y i ) a 2 h f ( xi , yi ) p1h
q11 K1h
x
y i a1h f ( xi , yi ) a 2 h f ( x i , y i ) a 2 p1h 2
f
y
f
f
a 2 q11 K1h 2
x
y
f
y i (a1 a 2 )h f ( xi , yi ) a 2 p1
a 2 q11 K1
x
f 2
h
y
f
f 2
y i (a1 a 2 )h f ( xi , yi ) a 2 p1
a 2 q11 f ( xi , yi )
h
x
y
Finalmente, comparando la Serie de Taylor de segundo orden con esta última expresión, se
obtiene lo siguiente:
a1 a 2 1
1
a 2 p1 2
a q 1
2 11 2
Para resolver este último sistema, es necesario dar un valor a una de las incógnitas, con lo
se tendrá una familia de Métodos de Segundo Orden.
7.3.1. MÉTODOS DE RUNGE - KUTTA DE SEGUNDO ORDEN
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
134
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
a1 21
Para a2 1 p1 1
2
q 1
11
por lo que:
y i 1 yi (a1 K1 a 2 K 2 )h y i ( 12 K1 12 K 2 )h
K1 f ( xi , yi ) gradiente al incio del intervalo ( xi , xi 1 )
donde:
K 2 f ( xi h, yi hK1 ) gradiente al final del intervalo ( xi , xi 1 )
a este método se le conoce con el nombre de MÉTODO DE HEUN
a1 0
Para a2 1 p1 12
1
q11 2
por lo que:
y i 1 yi (a1 K1 a 2 K 2 )h yi K 2 h
K1 f ( x i , yi )
donde:
1
1
K 2 f ( xi 2 h, yi 2 hK1 )
método conocido con el nombre de MÉTODO MEJORADO DEL POLÍGONO
a1 13
Para a2 2 p1 34
3
3
q11 4
por lo que:
y i 1 yi (a1 K1 a 2 K 2 )h y i ( 13 K1 23 K 2 )h
K1 f ( x i , yi )
donde:
3
3
K 2 f ( xi 4 h, yi 4 hK1 )
conocido con el nombre de MÉTODO DE RALSTON - RABINOWITZ
7.3.2. MÉTODOS DE RUNGE - KUTTA DE ORDEN SUPERIOR
Para n 3 , una versión común viene dada de la siguiente forma:
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
135
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
y i 1 yi 16 ( K1 4 K 2 K 3 )h
K1 f ( xi , yi )
donde: K 2 f ( xi 21 h, yi 12 hK1 )
K f ( x h, y hK 2hK )
1
2
i
i
3
Para n 4 , un método clásico viene dado por:
y i 1 yi 16 ( K1 2 K 2 2 K 3 K 4 )h
K1
K
2
donde:
K3
K 4
f ( xi , yi )
f ( xi 21 h, yi 12 hK1 )
f ( xi 21 h, yi 21 hK 2 )
f ( xi h, yi hK 3 )
Para n 5 , el MÉTODO DE BUTCHER (1964) viene dado por:
y i 1 y i
K1
K
2
K 3
donde:
K4
K5
K 6
1
90
(7 K1 32 K 3 12 K 4 32 K5 7 K 6 )h
f ( xi , yi )
f ( xi 41 h, y i 14 hK1 )
f ( xi 41 h, yi 81 hK1 81 hK 2 )
f ( xi 21 h, y i 12 hK 2 hK 3 )
f ( xi 43 h, yi 163 hK1 169 hK 4 )
f ( xi h, yi 73 hK1 27 hK 2 127 hK 3 127 hK 4 87 hK5 )
NOTA: Se pueden disponer de Métodos de Runge - Kutta de orden superior, tal como el
de BUTCHER, pero en general la ganancia obtenida en exactitud por métodos de
orden superior, se contrapone con la complejidad y esfuerzo de cálculo.
Ejemplo: Resolver la EDO del ejemplo anterior, mediante el método de Runge - Kutta de
segundo orden en la versión del Polinomio Mejorado.
x0 0
y , 4e 0.8 x 0.5 y Condciones iciales
y0 2
Intervalo = [0, 4], paso = 0.5
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
136
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
Proceso numérico:
0.8 xi
0.5 yi
K1 f ( xi , yi ) 4e
x 0 x 1 h
2
i
i
0
1
yi yi 2 hK1
0
K f ( x 0 , y 0 ) 4e 0.8 x i 0.5 y 0
i
i
i
2
yi 1 yi hK 2
Algunos pasos se detallan a continuación:
(x0, y0) = (0, 2)
K 4e 0.8 * 0 0.5 * 2 3
1
x 00 0 12 * 0.5 0.25
0
1
y0 2 2 * 0.5 * 3 2.75
0.8 * 0.25
0.5 * 2.75 35106
.
K 2 4e
y 2 0.5 * 35106
.
3.7553
1
(x1, y1) = (0.5, 3.7553)
K 4e 0.8 * 0.5 0.5 * 3.7553 4.0896
1
x10 0.5 12 * 0.5 0.75
0
1
y1 3.7553 2 * 0.5 * 4.0896 4.7778
0.8 * 0.75
0.5 * 4.7778 4.8996
K 2 4e
y 3.7553 0.5 * 4.8996 6.2051
2
(x2, y2) = (1.0, 6.2051)
K 4e 0.8 * 1.0 0.5 * 6.2051 5.7996
1
x 20 10
. 12 * 0.5 125
.
0
1
y2 6.2051 2 * 0.5 * 5.7996 7.655
0.8 * 1.25
0.5 * 7.655 7.0456
K 2 4e
y 6.2051 0.5 * 7.0456 9.7279
3
La tabla presenta el resumen de resultados mediante el cálculo analítico y el proceso
numérico:
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
137
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
xi
0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
Analítico
2.0
3.7515
6.1946
9.7070
14.844
22.427
33.677
50.412
75.339
R-K-2
2.0
3.7553
6.2051
9.7279
14.880
22.486
33.770
50.555
75.556
% error relativo
0
0.101
0.169
0.215
0.245
0.264
0.276
0.283
0.288
8. SISTEMA DE ECUACIONES DIFERENCIALES ORDINARIAS
Un S.E.D.O. de primer orden viene expresado de la siguiente forma:
y1
f 1 ( x , y1 , y 2 ,.., y n )
x
y2
f 2 ( x , y1 , y 2 ,.., y n )
x
.
.
yn
fn ( x , y1 , y 2 ,.., y n )
x
La solución del S.E.D.O. requiere de n condiciones iniciales de y en el valor inicial de x.
El procedimiento de solución del S.E.D.O. consiste en aplicar uno de los métodos
numéricos para la solución de una E.D.O., en forma secuencial a cada una de las E.D.O..
Ejemplo: Resolver el S.E.D.O. mediante EULER y R - K de 4to. ORDEN. Considerar el
intervalo [0,2], un valor de incremento h = 0.5 y las condiciones iniciales ( x0 = 0,
y0 = 4, z0 = 6).
y
0.5 y
x
z
4 01
. y 0.3z
x
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
138
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
a)
EULER:
Proceso numérico:
f ( xi , yi , zi ) 0.5 y i
y i 1 yi hf ( x i , yi , zi )
g ( x i , yi , zi ) 4 01
. yi 0.3 zi
zi 1 zi hg ( xi , yi , zi )
Algunos pasos se desarrollan a continuación :
( x0 = 0, y0 = 4, z0 = 6)
f ( x 0 , y 0 , z0 ) 0.5 y 0 0.5 * 4 2
y1 y 0 hf ( x 0 , y 0 , z0 ) 4 0.5 * ( 2) 3
g ( x 0 , y 0 , z0 ) 4 01
. y 0 0.3z0 4 01
. * 4 0.3 * 6 18
.
z1 z0 hg ( x 0 , y 0 , z0 ) 6 0.5 * 18
. 6.9
( x1 = 0.5, y1 = 3, z1 = 6.9)
f ( x1 , y1 , z1 ) 0.5 y1 0.5 * 3 15
.
y 2 y1 hf ( x1 , y1 , z1 ) 3 0.5 * ( 15
. ) 2.25
g ( x1 , y1 , z1 ) 4 01
. y1 0.3z1 4 01
. * 3 0.3 * 6.9 163
.
z2 z1 hg ( x1 , y1 , z1 ) 6.9 0.5 * 163
. 7.715
La siguiente tabla resume los pasos del proceso numérico:
xi
0
0.5
1.0
yi
4
3
2.25
zi
6
6.9
7.715
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
139
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
1.5
2.0
b)
1.6875
1.265625
8.44525
9.0940875
R-K 4to. ORDEN:
Proceso Numérico:
h
y i 1 yi [ K 1 2( K 2 K 3) K 4]
6
h
z i 1 z i [ L 1 2 ( L 2 L 3 ) L 4 ]
6
donde:
K 1 f ( x i , y i , zi )
L1 g ( xi , yi , zi )
h
h
h
K 2 f ( xi , yi K 1, zi L1)
2
2
2
h
h
h
L 2 g ( xi , yi K 1, zi L1)
2
2
2
h
h
h
K 3 f ( x i , y i K 2 , zi L 2 )
2
2
2
h
h
h
L 3 g ( x i , y i K 2 , zi L 2 )
2
2
2
K 4 f ( xi h, yi hK 3, zi hL 3)
L 4 g ( xi h, yi hK 3, zi hL 3)
El desarrollo de algunos pasos se detallan a continuación :
( x0 = 0, y0 = 4, z0 = 6)
K 1 f ( x 0 , y 0 , z0 ) 0.5 y 0 0.5 * 4 2
L1 g ( x 0 , y 0 , z0 ) 4 01
. y 0 0.3z0 4 01
. * 4 0.3 * 6 18
.
h
h
h
K 2 f ( x 0 , y 0 K 1, z 0 L1) f (0.25, 35
. , 6.45) 0.5 * 3.5 175
.
2
2
2
L 2 g (0.25, 35
. , 6.45) 4 01
. * 35
. 0.3 * 6.45 1715
.
h
h
h
K 3 f ( x 0 , y 0 K 2, z 0 L 2) f (0.25, 35625
.
, 6.42875) 0.5 * 3.5625 -1.78125
2
2
2
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
140
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
L 3 g (0.25, 35625
.
, 6.42875) 4 01
. * 35625
.
0.3 * 6.42875 1715125
.
K 4 f ( x 0 h, y 0 hK 3, z0 hL3) f (0.5, 3109375
.
, 6.8575625) 0.5 * 3109375
.
= - 1.5546875
L 4 g (0.5, 3109375
.
, 6.8575625) 4 01
. * 3109375
.
0.3 * 6.8575625 163179375
.
entonces:
h
0.5
y1 y 0 [ K 1 2( K 2 K 3) K 4 ] 4
[ 2 2( 175
. 1.78125) 15546875
.
]
6
6
= 3.115234375
h
0.5
z 1 z 0 [ L 1 2( L 2 L 3 ) L 4 ] 6
[18
. 2(1.715 1715125
.
) 1.63179375]
6
6
= 6.857670313
( x1 = 0.5, y1 = 3.12, z1 = 6.86 )
K 1 f (0.5, 312
. , 6.86) 0.5 * 312
. 156
.
L1 g (0.5, 312
. , 6.86)) 4 01
. * 312
. 0.3 * 6.36 163
.
K 2 f ( x1
h
h
h
, y1 K 1, z1 L1) f (0.75, 2.73, 7.27) 0.5 * 2.73 1363
.
2
2
2
L 2 g (0.75, 2.73, 7.27) 4 01
. * 2.73 0.3 * 7.27 1548
.
h
h
h
K 3 f ( x1 , y1 K 2, z1 L2) f (0.75, 2.77, 7.24) 0.5 * 2.77 1.387
2
2
2
L 3 g (0.75, 2.77, 7.24) 4 01
. * 2.77 0.3 * 7.24 1549
.
K 4 f ( x1 h, y1 hK 3, z1 hL3) f (10
. , 2.42, 7.63) 0.5 * 2.42 1211
.
L 4 g (10
. , 2.42, 7.63) 4 01
. * 2.42 0.3 * 7.63 1468
.
entonces:
h
0.5
y 2 y1 [ K 1 2( K 2 K 3) K 4 ] 312
. [ 156
. 2( 1.363 1.387) 1.211]
6
6
= 3.12 - 0.689 = 2.426171303
h
0.5
z 2 z1 [ L1 2( L 2 L3) L4] 6.86
[1.63 2(1548
.
1549
. ) 1.468]
6
6
= 6.86 + 0.774 = 7.632105674
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
141
ESCUELA
POLITÉCNICA
NACIONAL
Buy Now
to
Create
PDF without Trial
Watermark!!
Facultad de Ingeniería Eléctrica
Métodos Numéricos
La siguiente tabla resume los pasos del proceso numérico:
xi
0
0.5
1.0
1.5
2.0
yi
4
3.115234375
2.426171303
1.8895231
1.4715768
zi
6
6.857670313
7.632105674
8.3268860
8.9468651
Ing. Oscar E. Cerón A.
OECA _
Created by eDocPrinter
PDF Pro!!
142
ESCUELA POLITÉCNICA NACIONAL
Facultad de Ingeniería Eléctrica
MétodosWatermark!!
Numéricos
Buy Now to Create PDF without Trial
CONTENIDO:
Pág. N°
Objetivos generales …………………………………………………………………………
1
1. Introducción al análisis de errores ………………………………………………………
1
2. Evaluación de un polinomio y sus derivadas en argumento real ………………………..
6
2.1. Algoritmo de Horner ……………………………………………………………….
7
2.2. Implementación …………………………………………………………………….
9
3. Solución de ecuaciones de una variable ………………………………………………..
11
3.1. Métodos de Unión …………………………………………………………………
11
3.1.1. Algoritmo de Bisección ……………………………………………………..
12
3.1.2. Algoritmo de Falsa Posición …………………………………………………
15
3.2. Métodos iterativos de Punto Fijo …………………………………………………..
18
3.2.1. Condiciones de convergencia en los límites del intervalo ……………………
19
3.2.2. Algoritmo de Primer Orden …………………………………………………
21
3.2.3. Algoritmo de Segundo Orden ……………………………………………….
23
3.2.4. Algoritmo de la Secante ……………………………………………………..
25
3.3. Solución de Ecuaciones Polinomiales ………………………………………………
27
3.3.1. Algoritmo de Newton - Horner ……………………………………………..
31
3.3.2. Algoritmo de Newton - Bairstow ……………………………………………
34
3.3.3. Evaluación de polinomios y sus derivadas en argumento complejo …………
40
4. Solución de Sistema de Ecuaciones …………………………………………………….
42
4.1. Métodos Directos para la solución de un Sistema de Ecuaciones Lineales ………..
43
4.1.1. Algoritmo de Eliminación - Gaussiana ………………………………………
43
4.1.2. Algoritmo de Gauss - Jordan ………………………………………………..
47
4.1.3. Algoritmo de Factorización …………………………………………………
50
4.1.4. Pivotación …………………………………………………………………..
55
4.1.5. Sistema de Ecuaciones Lineales mal condicionado …………………………
58
4.1.6. Análisis de error en Sistema de Ecuaciones Lineales ……………………….
60
4.1.7. Sistema de Ecuaciones Lineales con términos complejos …………………..
64
4.1.8. Inversión de Matrices ……………………………………………………….
Created by eDocPrinter PDF Pro!!
Ing. Oscar E. Cerón A.
OECA _ 143
65
ESCUELA POLITÉCNICA NACIONAL
Facultad de Ingeniería Eléctrica
MétodosWatermark!!
Numéricos
Buy Now to Create PDF without Trial
Pág. N°
4.2. Métodos Iterativos para la solución de Sistemas de Ecuaciones ………………….
68
4.2.1. Métodos Iterativos para la solución de Sistemas Lineales ………………….
68
4.2.1.1. Algoritmo de Jacobi …………………………………………………
68
4.2.1.2. Algoritmo de Gauss - Seidel ………………………………………..
71
4.2.1.3. Condición de convergencia para los Métodos Iterativos de Jacobi y
Gauss - Seidel en Sistemas Lineales ………………………………..
73
4.2.2. Métodos Iterativos para la solución de Sistemas No Lineales ……………..
73
4.2.2.1. Algoritmo de Jacobi …………………………………………………
74
4.2.2.2. Algoritmo de Gauss - Seidel ………………………………………..
75
4.2.2.3. Algoritmo de Newton ………………………………………………
76
5. Interpolación (Aproximaciones) ………………………………………………………
78
5.1. Interpolación Estadística …………………………………………………………
79
5.1.1. Regresión Polinomial ……………………………………………………….
80
5.1.2. Regresión No Polinomial ……………………………………………………
84
5.2. Interpolación Polinomial …………………………………………………………
86
5.2.1. Técnica Matricial ……………………………………………………………
86
5.2.2. Polinomio de Lagrange ……………………………………………………..
89
5.2.3. Fórmulas de Interpolación de Newton ………………………………………
92
5.2.3.1. Diferencias Finitas………………………………………………………
92
5.2.3.2. Diferencias Divididas …………………………………………………..
98
5.2.4. Error en el Polinomio de Interpolación ……………………………………..
100
6. Diferenciación e Integración Numérica ..……………………………………………..
106
6.1. Fórmulas de Diferenciación ……………………………………………………..
107
6.1.1. Primera Derivada …………………………………………………………..
108
6.1.2. Segunda Derivada ………………………………………………………….
110
6.2. Integración Numérica ……..……………………………………………………
114
6.2.1. Fórmulas Básicas ………………………………………………………….
116
6.2.2. Fórmulas Compuestas …………………………………………………….
121
7. Solución numérica de Ecuaciones Diferenciales Ordinarias de Primer Orden ………
126
7.1. Método de Euler ……………………………………………………………….
127
Created by eDocPrinter PDF Pro!!
Ing. Oscar E. Cerón A.
OECA _ 144
ESCUELA POLITÉCNICA NACIONAL
Facultad de Ingeniería Eléctrica
MétodosWatermark!!
Numéricos
Buy Now to Create PDF without Trial
Pág. N°
7.2. Método Modificado de Euler ……………………………………………………
129
7.3. Métodos de Runge - Kutta ………………………………………………………
131
7.3.1. Métodos de Runge - Kutta de Segundo Orden …………………………..
133
7.3.2. Métodos de Runge - Kutta de Orden Superior …………………………..
134
8. Sistema de Ecuaciones Diferenciales Ordinarias …………………………………….
Created by eDocPrinter PDF Pro!!
Ing. Oscar E. Cerón A.
OECA _ 145
137