m - Conicyt
Anuncio

·~~ ~lv\_
UNIVERSIDAD DE CHILE
FACULTAD DE CIENCIAS FÍSICAS Y MATEMÁTICAS
-~~· DEPARTAMENTO DE FÍSICA
EFECTOS MACROSCÓPICOS DE LAS FLUCTUACIONES EN
UN BAÑO BACTERIANO DILUIDO
TESIS PARA OPTAR AL GRADO DE MAGÍSTER
EN CIENCIAS, MENCIÓN FÍSICA
CÉSAR ANDRÉS PARRA ROJAS
ftiCIDIDO
Pr~f.lfítffti 'lfl'tiutón CIPitll Humano AYanzado
OZABR 2019
m
l
-:¡BERTRÁ~tn¡wta~M~"'''''""'"''"................i ................................
PROFESOR GUÍA
RODRIGO SOTO
$5
W 1 1.....
111 _
ML
Oe$tfnl).l:. .~.l,,~,•·••"·'''"'"'
MIEMBROS DE LA COMISIÓN EVALUADORA
NICOLÁS MUJICA FERNÁNDEZ
ALEJANDRO VALDIVIA HEPP
SERGIO RICA MERY
Este trabajo ha sido financiado por la Beca de Magíster CONICYT
SANTIAGO DE CHILE
Diciembre 2012
~-..,...,,......................
Le savant n 'étudie pas la nature paree que cela est utile;
il l'étudie paree qu 'il y prend plaisir et il y prend plaisir
paree qu 'elle est be !le. Si la nature n 'était pas be !le, elle ne
vaudrait pas la peine d'étre connue, la viene vaudrait pas
la peine d'étre vécue.
Henri Poincaré
Matemático y físico francés
n
Resumen
Un baño bacteriano consiste en un fluido en el que nadan bacterias. Este nado produce agitaciones en el sistema, induciendo un campo de velocidades en él. En esta tesis, se presenta un estudio
hidrodinámico de las fluctuaciones en un baño bacteriano en aproximación diluida, y los efectos de
éstas sobre la agitación del sistema y la difusión de trazadores pasivos sumergidos en él.
Debido a su tamaño y velocidades típicas de propulsión, las bacterias se encuentran en un régimen de bajo número de Reynolds, por lo que están sometidas a condiciones de fuerza y torque total
nulos, y la dinámica del fluido en que se propulsan está descrita por las ecuaciones de Stokes. Así,
la perturbación que una bacteria ejerce en el fluido puede aproximarse como un dipolo de fuerza
puntual. El campo de velocidades inducido en el fluido por este dipolo da origen a interacciones
entre bacterias. Además, éstas experimentan colisiones, las cuales dominan a altas concentraciones,
dando origen a una transición hacia una fase de nado colectivo de tipo nemática.
El modelo estudiado consiste en la extensión de una teoría cinética previa, a partir de la cual
se obtienen ecuaciones hidrodinámicas para los campos de densidad, orientación y tensor dipolar
de las bacterias en dos dimensiones, las que se linealizan en fase isotrópica, cerca de la transición
nemática. Se calcularon los modos propios del sistema, además de las correlaciones entre los campos en espacio de Fourier.
A partir del campo de velocidades inducido por las bacterias en el fluido se obtuvo su energía cinética, de donde pudo extraerse una temperatura activa del sistema, la cual depende de
acoplamientos entre las componentes del tensor dipolar. Se encontró que esta temperatura diverge
logarítmicamente con el tamaño del sistema por la presencia misma de las bacterias, mientras
que las correlaciones entre ellas tienen el mismo comportamiento para tamaños grandes del sistema, y depende de la intensidad de las fluctuaciones. Este resultado fue extendido a tres dimensiones, donde ambas contribuciones resultan convergentes, dependiendo solamente de las escalas
microscópicas. Por otro lado, la velocidad cuadrática media corresponde a un caso particular del
tensor de correlaciones espaciales de velocidad. Se encontró en este caso que el modelo predice la
formación de vórtices en el sistema tanto en dos como en tres dimensiones.
Finalmente, se estudió de forma numérica la difusión de una partícula pasiva siendo arrastrada
por el campo de velocidades generado por las bacterias en el fluido. Los resultados obtenidos para
el coeficiente de difusión inducida indican que éste crece con el cuadrado del tamaño del sistema, lo
cual puede explicarse de manera simple considerando la dependencia de los tiempos de correlación
de las fluctuaciones con los valores propios del modelo. En función de la cercanía del sistema a la
densidad crítica, en cambio, el coeficiente de difusión inducida no tiene una dependencia clara para
los tamaños estudiados, pues esta dependencia se hace evidente sólo a tamaños muy grandes.
III
Agradecimientos
Este trabajo no hubiera sido posible sin la ayuda de ciertas personas, las que han estado a mi
lado y me han soportado durante todo este tiempo.
Quisiera agradecer en primer lugar a mi profesor guía, Rodrigo Soto, por su gran- ¿dije "gran"?
¡infinita! -paciencia y comprensión, por estar siempre dispuesto, porque fue una ayuda invaluable
para conseguir llegar hasta el final. Gracias por lidiar con mi déficit atencional a nivel de objetivos
de vida, por aguantar mi desaparición, por invitarme a Londres y dejarme viajar a Cracovia. Señor,
es ud. un gran científico, académico y, por sobre todo, persona. Sépalo.
Porque sin el sucio dinero no somos nada, agradezco a la Beca de Magíster CONICYT por
financiar este trabajo. También a los proyectos FONDECYT 1100100 y Anillo ACT 127, porpermitinne asistir a conferencias y viajar a terminar la tesis. Además, se usó el cluster del Departamento de Física (CIMAT-SCAT) de la Universidad de Chile. Mención especial al CIMAT y al
Chicago-Chile Materials Collaboration Program por darme, dos veces, la oportunidad de irme de
intercambio a Estados Unidos.
Por otro lado, me es imposible no agradecer a mis amigos, los que han contribuido a mantener
(¿?) mi salud (¿ ?) mental a lo largo de este proceso. A la Feña, Rodrigo, Manu y Lucho, mis ex
compañeros de Soliloquio. A mis compañeros y amigos de la oficina: la Frau, Chuki, Javier, Nico,
la Vicina, Nacho, Pancho, Tefa, Ale, Fran, Ulises, Santa, Seba y, porque era como de la oficina,
Marchi; como dijo uno de ustedes, son casi buenas personas. A los grandes, a los únicos, a los
incomparables Ariel, Bimbo, Malito, Álvaro y Conti, por todos los años que van y todos los que
vendrán; porque es menester. También a Fifo y la Cote, porque trotar con ellos fue mi mayor motivación para salir de la cama en los momentos de mayor estrés.
Finalmente, quiero dar gracias a mis padres y hermano por estar siempre presentes, por confiar
en mí y apoyarme en todo desde el comienzo. Sé que jamás habría llegado a este punto de no ser
por ustedes.
Special thanks to Ola for reminding me ofthe randomness oflife; for true happiness, love and
freedom.
A todos ustedes, gracias por su apoyo, compañía y cariño. Gracias por el café, el pool, la
cerveza, la música y las lecciones de vida. Muchas gracias por todo.
IV
,
Indice general
1. Introducción
1.1. Fluidos a bajo número de Reynolds y nado de bacterias
1.2. Aproximación dipolar y clasificación de nadadores
1.3. Fases de una suspensión bacteriana . . . . . . . . .
1.4. Agitación y difusión inducida de trazadores pasivos
1.5. Teoría cinética e hidrodinámica .
1.6. Caracterización de fluctuaciones
1.7. Metodología de trabajo . . . . .
1
1
2
5
5
6
7
7
9
2. Modelo hidrodinámico 2D
2.1. Introducción . . . . . .
2.2. Obtención del modelo hidrodinámico
2.3. Valores y vectores propios deL. . . .
2.4. Factores de estructura estáticos . . . .
2.4.1. Factores de estructura exactos
2.4.2. Solución aproximada para A y k pequeños .
13
17
22
24
28
3. Temperatura activa
3 .l. Introducción . . . . . . . . . . . . . . .
3.2. Cálculo de la temperatura . . . . . . . .
3.3. Resultado para Tcorr a partir del modelo
3.3.1. 2D. . . . . . .
3.3.2. Extensión a 3D . . . . . . . . .
35
35
38
41
42
44
4. Correlaciones espaciales de velocidad
4.1. Introducción . . . . . . . . . .
4.2. Cálculo general . . . . . . . .
4.3. Resultado a partir del modelo .
4.3.1. 2D. . . . . . .
4.3.2. Extensión a 3D . . . .
46
46
47
48
48
52
5. Difusión de una partícula en el campo de velocidades generado por las bacterias
5.l. Introducción .
5.2. Algoritmo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3. Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3.1. Coeficiente de difusión en función del tamaño del sistema
5.3.2. Coeficiente de difusión en función de la cercanía a la densidad crítica
57
57
59
63
63
66
V
9
6. Conclusiones
6.1. Trabajo futuro . . . . . . . .
6.1.1. Difusión inducida . .
6.1.2. Fuerzas tipo Casimir
68
69
69
69
Bibliografía
71
A. Expansión en modos de Fourier angulares
74
B. Expresiones analíticas exactas para los polinomios P n y Qn
76
C. Expresión analítica para el punto de inflexión de
D. Antitransformada de Fourier de Pij,k
G15
80
81
VI
,
lndice de figuras
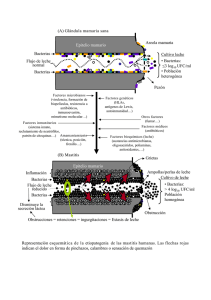
1.1. a) Dimensiones típicas de una bacteria propulsada por la rotación de sus flagelos; b)
campo dipolar de velocidades generado por un nadador tipo pusher (sentido de las
flechas se invierte para el caso de un puller); e) movimiento tipo run-and-tumble;
d) tanto pushers como pullers orientan su dipolo de fuerza en dirección de un flujo
impuesto, de manera que éste es reforzado por los pushers, mientras que los pullers
lo retardan. Imagen tomada sin autorización de [8]. . . . . . .
2.1. Valores propios ;¡I..- 3 en función de k, para A= 10-3 y D 1 =O. . . . . . . . . . . .
2.2. Valores propios A4 •5 en función de k, para A= 10-3 y D 1 =O. . . . . . . . . . . . .
2.3. Comparación entre los valores propios exactos (A) para el caso D¡ =O y los encontrados de forma perturbativa (A). . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.4. Régimen de validez de las expresiones (2.62) y (2.63) para distintos valores de A.
El valor que se muestra para k' corresponde a la expresión (2.66). . . . . . . . . . .
2.5. Comparación entre los valores propios obtenidos con D¡ =O y D¡ = 0.01. . . . . .
2.6. Factores de estructura G'I!a'I!ik,cp) en ifJ = rc/6, para A= 10-5 . Los puntos corresponden a la solución numérica de la Ecuación (2.74), mientras que la línea continua
representa las Ecuaciones (2.86) a la (2.91 ). . . . . . . . . . . . . . . . . . . . . .
2.7. (Continuación) Factores de estructura G'I!a'I!p(k,cp) en ifJ = rc/6, para A= 10-5 . Los
puntos corresponden a la solución numérica de la Ecuación (2.74), mientras que la
línea continua representa las Ecuaciones (2.86) a la (2.91). . . . . . . . . . . . . .
2.8. (a) Ubicación de las raíces más pequeñas de det(M) en función de A y (b) ajuste
de ellas con los valores de losan (Ecuaciones (2.122) a la (2.124)).
2.9. G¡ exacto (azul) y aproximado (rojo) para distintos valores de A.
2.10. G2 exacto (azul) y aproximado (rojo) para distintos valores de A.
2.11. G5 exacto (azul) y aproximado (rojo) para distintos valores de A.
2.12. 06 exacto (azul) y aproximado (rojo) para distintos valores de A.
2.13. Gs exacto (azul) y aproximado (rojo) para distintos valores de A.
2.14. G¡5 exacto (azul) y aproximado (rojo) para distintos valores de A.
3.1. Solución exacta para Tcorr en dos dimensiones en función deL= k*L/2rc (rojo),
junto a las expresiones obtenidas para tamaños grandes (azul) y Eequeños (verde). .
3.2. Solución exacta para Tcorr en tres dimensiones en función deL= k*L/2rc (rojo),
junto a las expresiones obtenidas para tamaños grandes (azul) y pequeños (verde). .
4.1. Funciones de correlación de velocidades transversal y longitudinal en dos dimensiones cuando L « k*- 1 . Importa observar los cambios de signo, por lo que la escala
vertical es irrelevante. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
VII
3
18
19
19
20
21
26
27
29
32
32
33
33
34
34
43
45
50
4.2. Tamaño caracterí~tico de los vórtices (puntos azules) en 2D cuando L « k*- 1 y
ajuste lineal con L (línea roja). . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4.3. Funciones de correlación de velocidades transversal y longitudinal en dos dimensiones cuando L » k*- 1. Importa observar los cambios de signo, por lo que la escala
vertical es irrelevante. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
4.4. Tamaño caracterí~tico de los vórtices (puntos azules) en 2D cuando L » k*- 1 y
ajuste lineal con L (línea roja). . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
4.5. Funciones de correlación de velocidades transversal y longitudinal en tres dimensiones cuando L « k*- 1. Importa observar los cambios de signo, por lo que la escala
vertical es irrelevante. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
4.6. Tamaño caracterí~tico de los vórtices (puntos azules) en 3D cuando L « k*- 1 y
ajuste lineal con L (línea roja). . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
4.7. Funciones de correlación de velocidades transversal y longitudinal en tres dimensiones cuando L » k*- 1. Importa observar los cambios de signo, por lo que la escala
vertical es irrelevante. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
4.8. Tamaño caracterí~tico de los vórtices (puntos azules) en 3D cuando L » k*- 1 y
ajuste lineal con L (línea roja). . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
5.1. Campos 'Pa(k) en función del tiempo para k= f..k para a) el intervalo completo de
simulación y b) una pequeña porción. . . . . . . . . . . . . . . . . . . . . . . . . 61
5.2. Trayectoria típica de la partícula en el campo de velocidades del fluido, en el intervalo [0, T]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
5.3. Desplazamiento cuadrático medio de la partícula, promediado sobre 20 to distintos
y 5 realizaciones del ruido, para a) todo el intervalo [0, T /20] y b) tiempos muy
cortos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
5.4. Coeficiente de difusión inducida en función del tamaño del sistema entre L = 10
y L =50 (cruces rojas); y ajuste con escalamiento cuadrático (línea verde) para
A = 0.1, Do = 0.03, D¡ = 0.0 l. Se omiten las barras de error, que son más pequeñas
que los símbolos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
5.5. Coeficiente de difusión inducida en función del tamaño del sistema entre L = 10 y
L =50 (cruces rojas); y ajuste con escalamiento cúbico (línea verde) para A= 0.3,
Do= 10, D¡ = 0.1. Se omiten las barras de error, que son más pequeñas que los
símbolos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
5.6. Coeficiente de difusión inducida en función de A. Se omiten las barras de error, que
son más pequeñas que los símbolos. . . . . . . . . . . . . . . . . . . . . . . . . . 67
VIII
Capítulo 1
Introducción
Durante las últimas décadas, ha crecido enormemente el interés por entender la dinámica de
organismos autopropulsados tales como bacterias, pájaros y peces, las interacciones entre ellos y
con otros objetos. La compresión de los fenómenos que se presentan en estos sistemas requiere de
diversas herramientas de la física. La mecánica de fluidos se utiliza para describir el movimiento
de partículas individuales; en efecto, la autopropulsión y las interacciones entre cuerpos son resultado de acoplamientos fluido-sólido. Además, se recurre a herramientas de física estadística con el
objetivo de deducir comportamientos colectivos originados a partir de las interacciones entre estas
partículas. Este problema de muchos cuerpos ha sido motivado por la biología, que busca comprender cómo esta locomoción afecta procesos tales como la reproducción humana [1] o la infección
bacteriana [2]. Sin embargo, existe también interés práctico por el desarrollo de nadadores artificiales que pudiesen llevar a cabo tareas específicas en sistemas microfluídicos [3], además de la
posible utilización de las fluctuaciones generadas por las partículas autopropulsadas en el sistema
para extraer trabajo [4].
Los sistemas de organismos autopropulsados forman parte de lo que se denomina materia activa. Este tipo de materia se caracteriza por tratarse de sistemas particulados (compuestos por un
conjunto discreto de elementos), cada uno de los cuales es un motor que transfonna continuamente
energía de un reservorio (en este caso el alimento de las bacterias) en movimiento. Esta energía
es luego disipada por colisiones o interacciones viscosas. Desde el punto de vista de la física estadística, la materia activa se encuentra en todo momento en condiciones fuera del equilibrio, con
un flujo termodinámico permanente en cada elemento del sistema. Las propiedades tensoriales de
estos sistemas son también novedosas, pues el flujo de energía genera una dirección de movimiento
dada por la orientación de las partículas, dando origen a dinámicas colectivas con fuente de ruido
vectorial en el momentum.
1.1.
Fluidos a bajo número de Reynolds y nado de bacterias
Una categoría particular dentro de los organismos autopropulsados la constituyen las bacterias y
algas unicelulares. Éstas, por su tamaño micrométrico, las velocidades de propulsión típicas (unas
decenas de micrones por segundo) y el hecho de transportarse en agua, están en un régimen de
1
bajo número de Reynolds. Este número corresponde a una cantidad adimensional que compara la
magnitud de las fuerzas inerciales con la de las fuerzas viscosas, y se define como
Re= pVL
(1.1)
1]
donde V es alguna velocidad típica y Luna longitud típica, mientras que p representa la densidad
del fluido y 1J la viscosidad de éste.
Dentro de esta categoría, la bacteria Escherichia coli (E. coli) ha sido objeto de estudio en una
gran variedad de procesos biológicos y biomecánicos [5]. Las dimensiones del cuerpo celular y
sus velocidades típicas son, respectivamente, del orden de 1 Jlm (ver Figura 1.1a) y 10 Jlm/s; por
lo tanto, si consideramos que estas bacterias se encuentran sumergidas en agua (p = 1 g/cm 3 y
5
1] = 1o- 2 g 1cm S), su nado estará descrito por un número de Reynolds del orden de 1o- .
Por otra parte, la evolución de los campos de densidad y velocidades del fluido se describe por
medio de las ecuaciones de Navier-Stokes. En el caso de un fluido incompresible, considerado en
este trabajo, éstas están dadas por
au
P-¡¡¡ + p(u ·V') u= -V'p + ryV'2 u + F
V'·u=O
(1.2)
(1.3)
donde pes la presión, u el campo de velocidades del fluido y F la fuerza por unidad de volumen actuando externamente sobre éste. En el límite Re « 1, estas ecuaciones se simplifican notablemente,
tomando la forma lineal
-V'p+ryV' 2 u+F =O
(1.4)
V'·U=Ü
(1.5)
Éstas expresiones son las denominadas ecuaciones de Stokes. A partir de estas ecuaciones, se
puede demostrar que los objetos inmersos en un fluido a bajo Re están sometidos a condiciones
de fuerza y torque total nulos [6], y que el desplazamiento experimentado por una bacteria una
vez que ha dejado de propulsarse es varios órdenes de magnitud menor a su tamaño, por lo que
puede decirse que se detiene instantáneamente [7]. Luego, los efectos inerciales son despreciables
en relación a los efectos de viscosidad.
1.2.
Aproximación dipolar y clasificación de nadadores
Una consecuencia de lo anterior es que la presión y campo de velocidades generados por un nadador en un fluido a bajo número de Reynolds sólo depende de las configuraciones que éste adopte,
2
b
a
'-, \Z,
1
1
"-,
Up
~--~\
/\!">~'§
/\
~--
~
1
Up
~--
- ~-
\'l-~"'
d
e
Clockwise rotation
of any motor:
bundle unravels
t
-' ()¡-,
-- J
J t
'•:'
Flagellar bundle
rotates anticlockwise
Figura 1.1: a) Dimensiones típicas de una bacteria propulsada por la rotación de sus flagelos; b)
campo dipolar de velocidades generado por un nadador tipo pusher (sentido de las flechas se invielie para el caso de un puller); e) movimiento tipo run-and-tumble; d) tanto pushers como pullers
orientan su dipolo de fuerza en dirección de un flujo impuesto, de manera que éste es reforzado por
los pushers, mientras que los pullers lo retardan. Imagen tomada sin autorización de [8].
adopte, y no de qué tan rápido sea su movimiento, ya que no existe dependencia temporal en las
ecuaciones de Stokes. Por lo tanto, un nadador no puede desplazarse en un fluido a bajo Re por
medio de movimientos recíprocos, resultado propuesto por Purcell [9] y que es conocido como teorema de la almeja (scallop theorem). Purcell consideró el mecanismo de propulsión de una almeja
(alto Re), que abre lentamente su concha para luego cerrarla de forma brusca y propulsarse expulsando el agua hacia atrás, y notó que un microorganismo no podría propulsarse de la misma
manera, pues la simetría temporal del movimiento haría que al abrir la concha éste se moviera hacia atrás tanto como avanzó al cerrarla. Propuso, además, distintas formas de romper esta simetría.
Una de ellas es que los microorganismos posean un brazo flexible que cambie de forma al regresar
a la configuración inicial; esta técnica es utilizada por los espermatozoides, que "golpean" el fluido
con un movimiento tipo látigo [10]. La otra es la utilización de un flagelo de forma helicoidal cuya
rotación empuje el fluido hacia atrás, y corresponde a la forma en que se propulsan las bacterias
como la E. coli.
La E. coli posee alrededor de seis flagelos unidos a diferentes puntos de su cuerpo celular, cada uno con un motor rotatorio en su base. Cuando estos motores rotan en sentido opuesto a las
manecillas del reloj, los flagelos actúan unidos y propulsan a la bacteria. Como ésta se encuentra
bajo condiciones de fuerza total nula, su cuerpo debe ejercer una fuerza sobre el fluido opuesta a la
que ejercen los flagelos y de igual magnitud, siendo la diferencia de geometría entre el cuerpo y los
flagelos la que rompe la simetría del movimiento. Como resultado neto de su propulsión, la bacteria
describe una caminata aleatoria con trayectorias aproximadamente rectas. Esta caminata se alterna
con rápidas reorientaciones aleatorias, que ocurren cuando los motores rotan en el sentido de las
3
manecillas del reloj, separando los flagelos y volviéndolos a unir en otra dirección [11]. Este tipo
de movimiento es conocido como run-and-tumble, y se muestra en la Figura 1.1 c.
Por otra parte, dado que las bacterias poseen "cabeza" y "cola", se trata de partículas polares y
su movimiento puede caracterizarse en función de un vector director. A bajo número de Reynolds,
las perturbaciones que una bacteria genera en el fluido se pueden calcular como una expansión
multipolar de la fuerza que ésta ejerce sobre él. A primer orden, la bacteria se homologa a un
dipolo de fuerza de intensidad ero, el cual es un tensor simétrico, orientado según el vector director
de la bacteria [12]. Esta aproximación permite clasificar a las bacterias como la E. coli y laBacillus
subtilis como pushers (ero < 0), pues éstas perturban el fluido desde su extremo posterior para
propulsarse. El caso contrario, en que la perturbación se realiza desde la parte anterior del nadador,
corresponde a los pullers (ero > 0), siendo un ejemplo de esto el alga Chlamydomonas reinhardtii.
El campo de velocidades producido en un fluido por un nadador a bajo Re toma, entonces, la forma
(ver Capítulo 3)
U¡(r)
= S¡J,k(r- ro)eronJnk
(1.6)
donde n es el vector de orientación del nadador y SiJ,k(x) representa el gradiente del tensor de
Oseen, dado en tres dimensiones por
~
~iJ(x)
1 1(
= 8m¡ ~
OiJ
X¡Xj)
-7
(1.7)
y se observa que decae con el inverso de la distancia. Así, el campo descrito por la ecuación (1.6)
decae con el inverso de la distancia al cuadrado. En la Figura 1.1 b se observa el campo de velocidades producido por un nadador tipo pusher; para un puller, la dirección del campo estará invertida
con respecto al caso anterior. Se puede observar, a partir de las líneas de campo, que un nadador
tipo pusher se siente atraído por otro nadando junto a él, mientras que se ve repelido por uno que
nada delante de él; el efecto es contrario en el caso de los pullers.
Debido a la condición de torque nulo las bacterias presentan, además del dipolo de fuerza, un
dipolo de torque, pues su cuerpo debe generar sobre el fluido un torque opuesto al de los flagelos;
sin embargo, el efecto de este segundo dipolo es menos importante. En efecto, para el caso tridimensional, el campo de velocidades producido por el dipolo de torque decae con el inverso de la
distancia al cubo; mientras que, como vimos, el campo debido al dipolo de fuerza decae con el
inverso de la distancia al cuadrado.
Los efectos macroscópicos producidos por estas partículas en una suspensión activa son distintos dependiendo del tipo de nadador del que se trate. En efecto, una suspensión de pullers se comporta esencialmente como una suspensión pasiva con una viscosidad efectiva mayor en relación a
la viscosidad del fluido, mientras que una suspensión de pushers presenta una viscosidad efectiva
reducida [12]. Esta diferencia puede entenderse a raíz del signo del dipolo de fuerza, notando cómo se orientan las partículas ante un flujo impuesto (ver Figura 1.1d). Además, una suspensión de
pushers difiere notoriamente de una suspensión pasiva, presentando interesantes propiedades como
4
inestabilidades hidrodinámicas y formación de patrones, lo cual no se observa en el caso de los
pullers [13].
1.3.
Fases de una suspensión bacteriana
La E. coli al nadar genera perturbaciones de largo alcance en el fluido, las cuales decaen como
el inverso de la distancia al cuadrado en tres dimensiones. Estas perturbaciones son las responsables de un tipo de interacción entre bacterias, pues se debe entender que ellas nadan con respecto
al fluido que, a su vez, no esta quieto sino en movimiento debido a la propulsión de las bacterias
1msmas.
Además de las interacciones hidrodinámicas, las bacterias también pueden colisionar. Estas colisiones requerirían una descripción de su geometría en la escala submicrométrica (posiblemente
hasta decenas de nanómetros); sin embargo, experimentos [14] y simulaciones [15] muestran que
su efecto neto es provocar un alineamiento de a pares entre ellas. Este alineamiento es producto
de interacciones cercanas no reversibles entre las bacterias; el porqué ocurre no es trivial, y existe
evidencia controversia! respecto a si los efectos puramente hidrodinámicos son capaces de producirlo [15, 16].
Para concentraciones bajas, caso en que dominan las interacciones de largo alcance, el sistema
se encuentra en fase isotrópica y las bacterias se orientan de manera aleatoria en el fluido. Cuando la
concentración es lo suficientemente alta, en cambio, los alineamientos entre partículas comienzan
a hacerse más y más relevantes y el baño bacteriano experimenta una transición hacia orientaciones
colectivas, similar a la de un cristal líquido nemático [17]. Este orden nemático no tiene fijo el vector director, lo que provoca que éste presente grandes fluctuaciones en su dirección para grandes
longitudes de onda. Su dinámica corresponde a un modo de Goldstone asociado al quiebre espontáneo de la simetría continua [ 18]. Al considerar la dinámica colectiva de las bacterias el vector
director se acopla a su velocidad promedio, de manera que ésta también puede presentar grandes
fluctuciones. La componente longitudinal de las fluctuaciones de velocidad produce por último
grandes fluctuaciones de densidad. Estas fluctuaciones se manifiestan en lo que ha sido llamado
giant density fluctuations, en las cuales la varianza en el número de bacterias en un volumen finito
va como N 2 y no como N, que corresponde al resultado clásico de la termodinámica [19].
1.4.
Agitación y difusión inducida de trazadores pasivos
Las fluctuaciones en un sistema como éste, en la cercanía de la transición nemática, pueden
tener grandes amplitudes y correlaciones de largo alcance. En dicho caso, pueden generar efectos
macroscópicos interesantes. El primero que se desea estudiar es la agitación inducida en el fluido,
es decir, su velocidad cuadrática media, que se podría interpretar como una temperatura activa del
fluido. En sistemas granulares con correlaciones de largo alcance se obtuvo que la agitación divergía con el tamaño del sistema de manera logarítmica [20].
5
Por otra parte, la agitación que producen las bacterias en el fluido tiene también un efecto importante sobre la dinámica de partículas pasivas (e.g. partículas de látex) presentes en él, induciendo
una difusión extra que se superpone a la difusión puramente termal obtenida en un fluido pasivo. Estudios experimentales acerca de la interacción de partículas pasivas con un baño bacteriano
muestran que existe una difusión inducida sobre dichas partículas, y se observa que el desplazamiento de estas partículas se comporta de forma superdifusiva para tiempos cortos, mientras que
para tiempos suficientemente largos el comportamiento corresponde a difusión normal [21]. Variando la concentración de las bacterias y su movilidad, fue posible determinar que la difusión inducida
es proporcional a la concentración de bacterias y su velocidad media [22]. Luego, si la agitación
del fluido es grande, puede provocar un aumento de la difusión inducida, de manera similar a lo
que ocurre en fluidos turbulentos. Desde el punto de vista teórico, este resultado se puede entender
en términos de interacciones binarias entre las bacterias y las partículas pasivas, para lo cual un
análisis de teoría cinética predice el escalamiento observado [7]. En esta tesis, se pretende estudiar
esta difusión mediante un modelo hidrodinámico para el campo de velocidades inducido por las
bacterias en el fluido y su influencia en el desplazamiento de las partículas pasivas, para un sistema
en fase isotrópica.
Ambos efectos, temperatura activa y difusión inducida, se estudiarán en relación a su dependencia con el tamaño del sistema considerado y con qué tan cerca se encuentra éste de la transición
hacia el nado colectivo de las bacterias.
1.5.
Teoría cinética e hidrodinámica
Para describir colectivamente estos sistemas se han formulado modelos hidrodinámicos y teorías cinéticas. Los modelos hidrodinámicos son ecuaciones a derivadas parciales para un conjunto
limitado de campos. Estas ecuaciones son nonnalmente deducidas en base a argumentos de simetría
o a partir de ecuaciones cinéticas y han sido capaces de describir algunas propiedades colectivas
como la transición nemática. Además son suplementadas con términos de ruido en el formato de
Landau y Lifhshitz de la hidrodinámica fluctuante [23]. Los modelos cinéticos consideran normalmente que las bacterias nadan libres salvo por interacciones cercanas que las alinean [24]. Con esto
ha sido posible predecir la inestabilidad nemática. También se incluye la reorientación bacteriana
debido a los cizalles [13], lo que ha permitido calcular la viscosidad efectiva de una suspensión
diluida de bacterias [12].
En [24] se describe un modelo cinético que incluye interacciones de a pares que dan lugar al
alineamiento mutuo. El modelo consiste en una ecuación en dos dimensiones para f(r,cp,t), la densidad de número de bacterias en r, orientadas según cp, en un instante t. A partir de esta ecuación
se realiza un procedimiento usual en teoría cinética consistente en la expansión en modos cinéticos (en este caso, componentes de Fourier angulares). Se obtienen entonces ecuaciones para un
conjunto de modos que se organizan jerárquicamente, bastando unos pocos de ellos para describir
la evolución del sistema [24]. Estajerarquización es particularmente válida cerca del punto crítico
nemático, dando lugar entonces a una hidrodinámica. Los campos encontrados son la densidad de
bacterias y su orientación local.
6
1.6.
Caracterización de fluctuaciones
Landau y Lifshitz expandieron el formalismo de Langevin para el caso de campos que evolucionan con ecuaciones de tipo hidrodinámico [23]. Esta extensión agrega fluctuaciones en las leyes
constitutivas con amplitudes determinads por las relaciones de fluctuación-disipación. Con estas
ecuaciones es posible estudiar la dinámica lineal de las fluctuaciones en tomo a un estado estacionario hidrodinámico. En particular es posible estudiar la intensidad, acoplamiento y los tiempos y
longitudes de correlación de las fluctuaciones. Como el promedio de las fluctuaciones es nulo, cualquier efecto no nulo se genera en acoplamientos no lineales entre los distintos campos fluctuantes.
Dependiendo del observable (sus simetrías por ejemplo), se reduce el número de modos acoplados
de manera considerable. El estudio se hará en la fase homogénea previa a la inestabilidad nemática pues de esta forma el estado de referencia es isótropo, lo que simplifica el análisis. Usando
esta herramienta es posible calcular la amplitud de las fluctuaciones de los modos hidrodinámicos
encontrados a partir de la teoría cinetica.
l. 7.
Metodología de trabajo
La metodología de este trabajo será teórica, usando las herramientas de la teoría cinética, la
hidrodinámica fluctuante y la teoría de acoplamiento de modos.
Al tener muchas bacterias, el flujo generado en el fluido es la superposición de los flujos de todas
las bacterias; se pretende determinar el efecto de esta superposición sobre la energía cinética del
fluido. En una aproximación continua, se encuentra que las correlaciones de velocidad en el fluido
están dadas por las correlaciones del tensor dipolar de las bacterias, de manera que la velocidad
cuadrática media está dada por
(u2(r))cx Jdr Jdr¡ Jdr2Fijk(r-r¡)Fum(r-r2)(sj!c(r¡)s¡m(r2))
(1.8)
con F¡;k la parte simétrica en jk de 'B¡J,k· Así, la teoría cinética presentada en [24] será extendida
de dos maneras: primero, se incluirá en la hidrodinámica la evolución del tensor dipolar de fuerza,
pues es el campo relevante; además, se agregará el efecto de las fluctuaciones en el sistema. Así, se
aplicarán los métodos de la hidrodinámica fluctuante para determinar las correlaciones espaciales
del tensor dipolar en un baño de bacterias en fase isotrópica. Este procedimiento se realizará en
espacio de Fourier, y las transformadas de Fourier de las correlaciones espaciales se denominan
factores de estructura estáticos. Estos resultados serán, luego, aplicados al cálculo de la energía
cinética del sistema, de donde se puede obtener una temperatura activa.
Por otra parte, se estudiará el efecto de la agitación del fluido sobre la difusión de una partícula
pasiva inmersa en él. En este caso, el coeficiente de difusión va a depender de correlaciones espaciotemporales de velocidad de la forma
U¡;(tis)
= (u¡(x,t)u¡(x,tls))
7
(1.9)
con u(x, tis) la velocidad en el instante s del elemento de fluido que pasa por la posición x en el
instante t [25]. Estas correlaciones no pueden obtenerse a partir de los factores de estructura, y su
cálculo análitico directo es extremadamente complicado, por lo que el análisis se hará de forma
numérica.
En sistemas similares, estas técnicas ya han sido utilizadas para calcular agitación del fluido [20] y difusión [26].
Esta tesis se encuentra organizada de la siguiente manera: en el Capítulo 2 se extiende la teoría
cinética para incluir el efecto de las fluctuaciones en el sistema, y se obtiene una hidrodinámica
para la evolución de los campos de densidad, orientación y tensor dipolar de fuerza; se calculan
los modos propios del sistema y las correlaciones estáticas entre los campos. En el Capítulo 3 se
deriva una expresión general para la temperatura activa del sistema en función de las correlaciones
entre los campos, utilizando la forma que toma el campo de velocidades del fluido generado por un
dipolo de fuerza puntual y calculando la energía cinética de éste; luego, se aplican los resultados
obtenidos en el Capítulo 2 para dichas correlaciones y se obtiene un valor particular. Este mismo
procedimiento se repite en el Capítulo 4 para el caso más general del tensor de correlación del campo de velocidades del fluido. Finalmente, en el Capítulo 5, se resuelve numéricamente el modelo
presentando en el Capítulo 2 para obtener el campo de velocidades del fluido y estudiar la difusión
de una partícula pasiva puntual siento arrastrada por éste.
8
Capítulo 2
Modelo hidrodinámico 2D
Resumen
En este capítulo, se presenta un modelo hidrodinámico fluctuante para los
campos de densidad, orientación y tensor dipolar de las bacterias, para un
sistema bidimensional en fase isotrópica, cerca del punto crítico que da origen
a la inestabilidad nemática. Este modelo se deriva a partir de una extensión
de la teoría cinética presentada en [24], la cual no contempla la evolución del
tensor di polar ni el efecto de las fluctuaciones no termales en el sistema.
Se calculan los valores propios del modelo en espacio de Fourier en la aproximación de grandes longitudes de onda, pues interesan los efectos de largo
alcance en el sistema. Se encuentra que dos de ellos presentan comportamiento
crítico, dando cuenta de la inestabilidad nemática; otro es puramente difusivo,
mientras que existen dos de decaimiento.
Por otra parte, se obtienen las correlaciones entre los campos fluctuantes
mediante el cálculo de los factores de estructura estáticos del sistema. Este
cálculo se realiza de forma exacta, utilizando las formas tensoriales de los
factores de estructura, quedando éstos determinados por un conjunto de
funciones escalares, algunas de las cuales divergen cuando el sistema se acerca
a la inestabilidad. Además, se obtienen expresiones aproximadas para estas
funciones en el límite de grandes longih1des de onda cuando la suspensión
posee una densidad cercana a la crítica.
2.1.
Introducción
Para estudiar la dinámica de las bacterias en el fluido, recurrimos a un modelo cinético para la
función distribución JO de éstas. Las variables que usaremos para describir este sistema serán la
posición de las bacterias y su orientación. A Re = O, la velocidad de las bacterias puede obtenerse
como función de sus posiciones, por lo que no se trata de una variable independiente y el momentum no corresponde a una variable del espacio de fase. Consideramos, entonces, un modelo simple
9
que reproduce la dinámica de las bacterias y da cuenta de la inestabilidad nemática de la suspensión
en dos dimensiones [24]
otf(r, cp, t) = Dro~f(r, cp, t) +o¡ [D¡joj/(r, cp,t)]- V· [/(r, cp,t)u(r, cp, t)] + 1 +oq; [/(r, cp,t)g(r,cp,t)]
(2.1)
En la expresión anterior, f(r, cp, t) representa el número de bacterias por unidad de volumen que
se encuentran en la posición r y orientadas en dirección n = (cos cp, sincp) en un instante de tiempo
t dado, normalizada de manera que la cantidad fdrdcp corresponde a un número de bacterias; los
primeros dos términos a la derecha dan cuenta de la difusión rotacional y espacial de las bacterias,
resultado promedio de las fluctuaciones termales en el sistema que dan origen a su movimiento
Browniano, mientras que el tercero es un término advectivo, con u la velocidad de las bacterias; 1
es una contribución debida a colisiones entre pares de bacterias; finalmente, se agrega un término
fluctuante que representa los efectos no deterministas de origen no termal en el sistema mediante
un ruido g de intesidad r, el cual conserva el número de bacterias y que supondremos Gaussiano y
delta-correlacionado, i. e.,
(g(r,cp,t)) =O
(g(r, cp,t)g(r' ,cp', t'))
(2.2)
= fb (r- r')b (cp- cp') b (t- t')
(2.3)
Este ruido entra de forma multiplicativa en la ecuación para f pues corresponde a fluctuaciones
debidas a la presencia de las bacterias, como por ejemplo el tumbling de éstas, a diferencia de las
fluctuaciones termales que dan origen a los términos de difusión.
La función distribución está normalizada de manera que
J
dcp f(r, cp, t)
1
- () Jdcpf(r,cp,t)n
p r,t
1
- () Jdcpf(r,cp,t)nn
p r,t
= p(r, t)
(2.4)
= r(r,t)
(2.5)
= 0(r,t)
(2.6)
donde p(r, t) es la densidad de número local de bacterias, r(r, t) el vector orientación local y 0(r, t)
el tensor dipolar local. Interesarán en el cálculo las correlaciones entre dichos campos, en particular
las del tipo (pp), (p0) y (00).
Se debe destacar que el tensor dipolar es simétrico, por lo que ®xy
vector director n es unitario, i.e., n = /n/ = 1, de donde
Tr(0) =-1
p
I
dcpfn 2 =-1
p
=1
I
= ®yx·
Además, como el
1
dcpf= -p
p
(2.7)
10
Así, la traza de 0 está fija y es igual a la unidad. Luego, el tensor dipolar tiene solamente dos
grados de libertad.
Para el tensor de difusión espacial se tiene
n·n
D lj.·- D¡¡n·n
l j ·+D.(~··-'- U¡}
l j ·)
(2.8)
*
que corresponde a la descripción usual para un sistema isotrópico. Típicamente, D¡¡ D _1_, debido a
la forma alargada de las bacterias. Por otra parte, la velocidad de la bacteria i-ésima está dada por
U¡(r,cp,t) = Uo +von(cp,t) +
_¿ Uij(r,cp,t)
(2.9)
f!=i
con uo la velocidad propia del fluido, que supondremos en reposo (uo = 0), vo la velocidad de propulsión de las bacterias a lo largo de su vector director n y uu la velocidad inducida por la bacteria
j-ésima en la bacteria i-ésima. Consideraremos un sistema con suficientes bacterias como para que
la interacción entre ellas esté dominada por las colisiones, por lo que en esta aproximación despreciaremos los efectos hidrodinámicos, que dominan a largas distancias, y los trataremos únicamente
como ruido. Luego,
u¡(r,cp,t)
~
von(cp,t)
(2.10)
Finalmente, consideraremos un sistema diluido en el sentido del límite de Boltzmann-Grad, i.e.,
supondremos que la fracción de volumen ocupada por las bacterias es muy pequeña, de manera que
las interacciones colisionales se dan solamente de a pares. En esta aproximación, cuya validez se
verá más adelante, el término colisiona! es de tipo Boltzmann [27] y puede escribirse como [24]
JJJ
7[
1=
dr¡
2
dw [ w(r¡,r2,c,b+ ;,c,b- I)!(r 1,c,D+ ;,t)f(r2,cp- ;,r)s(r¡ ;r -r)
dr2
-7[
-W(r¡ ,r2,c,b,cp- w)f(r¡ ,cp,t)j(r2,c,b -w,t)o(r2- r)]
(2.11)
donde W representa la tasa de colisiones entre pares de bacterias. Supondremos que cada una de
estas colisiones es completamente inelástica, dando origen a un alineamiento entre las partículas
involucradas, cuya posición y orientación después de la colisión estarán dadas por los promedios
de sus posiciones y orientaciones antes de ella. Por simplicidad, además, consideraremos una tasa
de la forma W(r¡,r2,c.bJ,c.b2) =go(r¡ -r2), i.e., interactúan las bacterias que se encuentran en una
misma posición, sin importar su orientación inicial. Así,
11
Jdw lf(r,cp+ ;)!(r,cp- ;)-f(r,cp)f(r,cp-w)j
7r
8tf = Dr8~ +8¡DiJ8Jf- V· (fvon) +g
+8q,(f?)
-Jr
(2.12)
A partir de esta ecuación se obtendrá la hidrodinámica de los campos a estudiar. Dimensionalmente, como f tiene unidades de densidad, puede verse que la expresión anterior escala como
atP ~ (gp)p
(2.13)
Luego, para que el termino colisiona! sea relevante, se necesita que gp sea finito. Vemos, además, que
g~
distancia 2
.
tzempo
(2.14)
Así, un escalamiento natural para este parámetro será
g~v 0 b
(2.15)
con b un tamaño característico para las bacterias. Se requiere entonces que gp ~ vobp sea finito. Si
hacemos b---? O, entonces necesariamente p---? oo, por lo que la aproximación de (2.11) es válida
incluso para altas concentraciones.
Por otra parte, se puede estimar con cuántas otras bacterias interactúa hidrodinámicamente cada
una de ellas, definiendo el camino libre medio como
1
lm ~ pb
(2.16)
Luego, el número de bacterias en un camino libre medio estará dado por
1
N¡~ P (pb)2
v2
o
p-
~ (vopb)
2
(2.17)
Vimos que el denominador de esta expresión es finito. Así como p---? oo, se tiene que N 1 ---? oo.
Se ve, entonces, que a altas concentraciones cada bacteria interactúa hidrodinámicamente con un
gran número de otras; sin embargo, estos efectos se anulan entre sí en fase isotrópica, donde las
bacterias se orientan aleatoriamente. Luego, la interaccion promedio es aproximadamente nula y
puede incluirse en el término de ruido, simplificando (2.9).
12
2.2.
Obtención del modelo hidrodinámico
Queremos encontrar expresiones para la evolución de los campos p, T¡ y 0¡1, para lo cual seguiremos el procedimiento de expansión en modos de Fourier angulares descrito en [24], de forma
que
1
7r l...Jm(r,t)eimif;
2
1
q(r, </J, t) = 7r
qm(r, t)eimif;
2
f(r,<(J,t)
=
2..
(2.18)
(2.19)
fm(r,t)
= Jd</JJ(r,<(J,t)e-imif; =p(r,t)(e-imif;)
(2.20)
qm(r,t)
= Jd</Jq(r,<(J,t)e-imif;
(2.21)
Se obtenie (ver Apéndice A)
·
(
~
(nm
. ) +Do'il2 fm+2
D¡ (8xx-8yy ) Vm+2+fm-2)
fm+
Drm2 +gfo ) fm=gúfm-JiJS
2-]7r
j
va [
.
] im
.
+ zD¡8x8y(fm+2fm-2)- 2 8xVm+1 + fm-1) + z8y(fm+1- fm-1) + 7rfoqm
2
(2.22)
Este modelo da lugar a una ecuación tipo Ginzburg-Landau para el vector director promedio T,
que posee un punto crítico en Pe = nDrl (4 -n)g, tras el cual se origina la inestabilidad nemática
[24]. Este punto crítico puede visualizarse de mejor manera escribiendo la parte determinista de la
ecuación para f¡, a partir de (2.22), sin dependencia espacial y hasta orden lineal
.
f1
(4-n)
)
= (g-7r-p-Dr
f1
(2.23)
donde Jo= p en este caso representa simplemente la densidad promedio del sistema, y !1 =p (Tx- iTy)
(ver (2.20)). Así, para densidades menores a Pe, el sistema se encontrará en fase isotrópica, y la solución estable tendrá T = O y 0 = K; esta solución se vuelve inestable para densidades mayores a
Pe, donde T =1= O y el sistema experimenta un quiebre espontáneo de simetría (la dirección del nado
colectivo es aleatoria).
Adimensionalizamos el modelo de manera que
t~Drt
r
r~-
l
gp
p~­
Dr
13
(2.24)
(2.25)
(2.26)
vo
vo ~ Drl
Do
Do~ Drf2
D¡
D¡ ~ Drl2
~
(2.27)
(2.28)
(2.29)
(2.30)
~~-
Dr
r
r~ Drf2
(2.31)
donde l representa el largo característico de las bacterias y es una escala natural del sistema, mientras que la otra corresponde a Dr. Existen, entonces, cinco parámetros adimensionales en este problema, correspondientes a p, v0 , Do, D 1 y r. El primero de ellos corresponderá, como veremos más
adelante, a nuestro parámetro de control, pues nos importará el comportamiento de las fluctuaciones en función de qué tan cerca se encuentre el sistema de la densidad crítica Pe· Para la velocidad
adimensional de propulsión de las bacterias, un valor representativo corresponde a vo = 0.2 [28],
mientras que D 1 = 1/96 y Do = 3D¡ son valores conocidos de física de polímeros para partículas
alargadas rígidas [24]; usaremos para gráficos y simulaciones los valores Do = 0.03 y D¡ = 0.01.
Finalmente, el valor de res desconocido, pero los efectos estudiados en este trabajo dependen linealmente de este parámetro, por lo que sólo tendrá una influencia de escala.
Cerca de la transición nemática, la evolución del sistema estará determinada por las primeras
componentes de la expansión en Fourier. Además, notamos que los campos que nos interesa estudiar están descritos completamente por fo, Ji y fz. En efecto, además de los valores vistos para Jo
y Ji , se tiene
Jz =P (E>xx -
0yy - 2i0xy)
(2.32)
Las expresiones encontradas pueden invertirse de manera que
(2.33)
p=fo
1
Tx
Tx
E>xx- 0yy
= p-Refi
(2.34)
1
= --Imfi
(2.35)
p
1
= p-Refz
1
2p
0xy = --Imfz
E>xx+E>yy = 1
14
(2.36)
(2.37)
(2.38)
En [24] se estudia la evolución del sistema hasta
lml = 1, separando la escala de manera que
j2 =O; en este caso extenderemos el modelo para dar cuenta de la evolución de .f2. Buscaremos un
modelo lineal en los campos, de manera que no nos interesará el valor que toma .h en función de
Jo,!,2 cuando }3 =O, el cual entra no linealmente en la ecuación. Así, truncando la serie de forma
que fm =O para
lml;::: 3, se tiene
jJ =Do \¡2 p+ D¡ (axx -a}Y) [P( ®xx- 0})1 )] +4D¡BxBy (Pexy)
-vo [ax(prx)+By(Pry)]
Bt [P(Tx -iTy )]
(2.39)
= (Ep-I)p(Tx- iTy)- 3:p2 (0xx- ®yy -2i®xy )(rx + iTy)
1
2
+Do'V [P(Tx- iTy )] + ~ (axx -Byy) [P(rx + iTy )] + D¡BxBy [P(ry- irx)]
- ~ [ax [p(1 + ®xx -®}Y -2i®xy )] + iBy [P(®xx- 0})1 -2i®xy -1 )]]
i
(2.40)
+ 2npg¡
Bt [p(®xx- ®yy -2i®xy)]
= -(p+4)p(®xx- ®}Y-2i®xy) + /
(rx- iTyt + ;pg2
+DoV2 [p(®xx-®}Y-2i®xy)]+ ~ (axx-a}Y)p-iD¡BxByp
1
-
~ [ax[P(Tx-iTy)]-tay[P(Tx-iTy)]]
(2.41)
con E= (4-n)/n = p~ 1 • Linealizamos en tomo a una densidadp* cercana, pero menor, a la densidad
crítica
p=p*+op
p* :S Pe
(2.42)
de manera que el sistema se encuentra en fase isotrópica, por lo que
T¡
= O+T¡
1
®¡j
(2.43)
-
= 20ij + ®¡j
(2.44)
En las expresiones anteriores, op, T¡ y ®u representan campos fluctuantes de promedio nulo,
i.e.,
(op(r, t))
=o
(2.45)
(r¡(r, t))
=o
(2.46)
(0u(r,t)) =O
(2.47)
15
-
Definiendo E>o
-
-
=(E>xx- E>yy)/2, 0¡ = E>.xy se tiene, a primer orden en los campos fluctuantes,
6p =Do V2 Op + 2D¡p* (Oxx- Oyy) E>o + 4D¡p* OxOy0! - vop* (OxTx + Oy Ty)
l
.
Tx
D¡ (Oxx-Oyy ) Tx+DroxOyTy-2
vo [Ox (op
= -ATx+DoV2 Tx+T
p* +20o ) +2oy0r -
.
Ty
D ¡ ( Oxx -oyy ) Ty +DroxOyTx- vo [2ox01 +oy ( Op
= -Ary +Do V2 Ty- T
p* -20o
2
2
.
D 1 ( a -a ) óp v0 ( - a r ) __
1 ~:1
E>o=-BE>o+DoV
E>o+XX
yy p*- - a r
X X
Y y
7fs2
4
.
E>r
4
2
Dr aop
1 ¡:R
= -BE>r +DoY'2 E>r +-o
- - vo
- (aX r y +oyr X ) __
X y p*
7fS2
2
4
2
(2.48)
17ff,1 (2.49)
1
2
)l - 217ff,
R
1
(2.50)
(2.51)
(2.52)
donde A= 1- Ep*, B = p* +4, f,~ = Ref,m, f,~ = Imf,m, y se ha suprimido la barra de T¡ para simplificar la notación. Vemos que A cambia de signo en p* =Pe, dando origen a la inestabilidad antes
mencionada; mientras, B se mantiene siempre positivo, por lo que no se trata de un parámetro crítico.
Por otra parte, se debe destacar que la ecuación para p no presenta término fluctuante. Esto se
debe a que la ecuación de conservación del número de bacterias es exacta.
Usando la transformada de Fourier espacial
h(k,t)= Jdrh(r,t)e-ik·r
h(r,t)
= -1-2
(2n)
I
dkh(k,t)e 1"k ·r
A
(2.53)
(2.54)
se tiene un sistema de la forma
o'l' = -L. '1' + 17
at
(2.55)
= ($p, Tx, Ty, Go, é¡)
(2.56)
con
'1'
1(
A A A A)
17 =- 2n O,f,{,r,f,r,f,r,f
16
(2.57)
Dok2
ivokx
2p*
--
L=l
A+D0 k2 + ~
(k~-ky)
1
2D¡p* (/?; -ky) 4D¡p*kxky
ivop*ky
ivop*kx
D¡kxky
ivokx
ivoky
-ivoky
ivokx
--
ivoky
2p*
D¡kxky
D¡ ( 2 2)
4p* kx -ky
¡. k
:¡zvo
x
¡. ky
-:¡lVO
B+Do~
o
D¡
2kxky
p*
¡. ky
:¡lVO
¡. k
:¡lVO
x
o
B+Dok2
A +Dok2 -
~~
(ki -k;)
(2.58)
2.3.
Valores y vectores propios de L
Nos interesa la dinámica de grandes longitudes de onda del sistema, pues ésta puede dar lugar
a efectos macroscópicos. Por esta razón, buscamos los valores propios deL para k« l. Notemos
que podemos escribir
L =Lo +kL¡ +~L2
(2.59)
Así, resolvemos el problema de valores propios L · 'P = A'P de manera perturbativa usando
(2.59) y expandiendo
'P ='Po +k'P¡ +~'1'2 +0(12)
(2.60)
A= Ao +kA¡+~ A2 +0(12)
(2.61)
Para simplificar el cálculo analítico, supondremos que D 1 = O. Esto quiere decir que D 11 = D _1_,
i.e., no estamos considerando el efecto la forma alargada de las bacterias en la difusión espacial de
las mismas. Se obtiene, entonces, para los valores propios,
1
A
=IDo+~ ]k' +O(k')
(2B-3A)~l
A2 =A+ [Do- 4A(B-A)o ~ +0(12)
3
A =A+
[no+ 4(~A) ]k' +O(k')
17
(2.62)
(2.63)
(2.64)
Re.\
0.0035
:: l
-
A'
-
A'
"""·
A3
0.0020
0.0015
0.0010
0.0005
0.00
0.06
0.04
0.02
0.08
0.1 o
k
Im A
0.015
0.010
0.005
- 0.005
~~
~
0.04
0.06
0.08
0.1 o
k
-0.010
-0.015
Figura 2.1: Valores propios A1... 3 en función de k, para A = 10- 3 y D 1 =O.
A4,5
=B +
[D - 4(B-A)
.v6 lk2 +0(k3)
0
(2.65)
Luego, a este orden, existe un modo puramente difusivo (A 1) que no cambia cualitativamente
al acercar el sistema a la transición nemática (A ---> O); dos modos críticos (A 2•3 ) que se vuelven
inestables en A = O, dando cuenta de la transición al nado colectivo; y dos de relajación (A 4·5 ) que
no modifican su comportamiento, pues B se mantiene positivo en todo momento. Las Figuras 2.1 y
2.2 ilustran los valores propios Al ... 3 y A4 •5 , respectivamente, para A = 1o- 3 . Con este mismo valor
para A se muestra, en la Figura 2.3, la desviación de los valores propios encontrados de manera
perturbativa con respecto a sus valores exactos, para aquellos en que ésta puede apreciarse.
Se observa que la aproximación para la parte difusiva de A1•2 , que parece divergir cuando A --->O,
es válida sólo hasta k = k', donde k' cod·esponde al punto en que Rd 1 = Rd 2 ; para k > k', este
término no presenta divergencia conA (v¿r Figura 2.4). Usando las expresiones aproximadas (2.62)
y (2.63), se encuentra
1
18
Re ,t 4 ,s
10
4
10
w- 3 y D¡
Figura 2.2: Valores propios /!4 •5 en función de k, para A=
Re
k
=O.
A
0.0010
0.0008
,t'
/
;t2
0.0006
,."'
''\
"""e-<"
A'
0.0004
A'
0.0002
.,.., ....
0.001
0.002
.-"
......... .....
0.003
,
.
"~c•""'~~ .. !'r<..,.,
, ... , ..
0.004
/
//
.;"' ,,
/
0.005
0.006
k
Figura 2.3: Comparación entre los valores propios exactos(/!) para el caso D¡ =O y los encontrados
de fon11a perturbativa (A).
k'~
4A 2 (A -B)
(5A -4B)v6
(2.66)
Por otra parte, se puede ver que el efecto de D¡ es netamente cuantitativo, modificando la intensidad de la componente difusiva de los distintos modos, sin verse afectado su comportamiento.
La Figura 2.5 muestra los valores propios obtenidos con D¡ = 0.01 y los compara con aquellos para
D¡ =0.
Para los vectores propios, con D 1 = O, encontramos de forma perturbativa
19
Re A
Re ,\
IJOX
1
o.oc.l
0006
'
~
~
0004
0.1
0.2
OJ
0.4
05
ll.6
k
0.01
0.03
004
005
().()6
k
(b) A = 1o- 2 , k' ~ 5 x 1o- 2
(a) A= 10- 1, k'~ 5x 10- 1
Re,\
Re,\
() 0010 !----___
0.0001
O.OOOti¡
o.oooor,l
().()()()61
~
~
().()()()4
().()()()2
ll.OOI
(}.(J02
().(){)]
(),004
0.005
~
~
0,()0004
0.00002
O.ll06
k
L
0.0001
(e) A= 10-3 , k'~ 5 X 10-3
().()002
0.0003
().()004
-1.
_J.
_j
0.0005
~
..L_-
j
k
().()()()(,
(d) A= 10-4 , k'~ 5 X 10-4
Figura 2.4: Régimen de validez de las expresiones (2.62) y (2.63) para distintos valores de A. El
valor que se muestra para k' corresponde a la expresión (2.66).
o
ivokcos<ft
2p"A
tpl = (1 +C
l
k)l
1
_ivoksin<P
2p*A
1
o
o
+
1
o
1 1
vók2 cos(2</>)
SABp*
o
J
1
v5k2 sin(2</>)
(2.67)
8A8p*
ivokp*
-A-
coscp
2
I.J' = (1 +C2k)l
sincp
(2.68)
1
ivok cos(2</>)
4(8-A)
ivok sin(2</>)
4(8-A) ...
20
Re A 1
O.OOOR
Re A 2
~
1
0.0010)
~
1
O.OOOH i
0.0006!
1
~
0.0006
¡_
1
0.0004
!
1
A (D¡ =O)
---
0.0004 i
A 1 ( D¡ =0.01)
¡
1
1
0.0002
1
0.0002 '
0.02
0.04
0.06
O.OK
0.10
k
0.02
0.06
0.04
A'( D¡ =O)
A 2 (D¡=O.OI)
O.OR
0.10
811
1011
k
Re A 4 • 5
Re A 3
350
--
0.0012 i
300
0.0010
--
1
250
1
O.OOOH
1
--
j
0.00061
--
0.00041
A'( D¡ =O)
A'(D¡=O.OI)
A 4 • 5 ( D¡ =0)
A 4 ( D¡ =0.01)
A 5 ( D¡ =0.01)
-
21111
150
100
0.0002 :
50
0.02
0.04
0.06
O.OR
0.10
k
211
60
411
k
Figura 2.5: Comparación entre los valores propios obtenidos con D 1 =O y D 1 = 0.01.
o
sinif¡
\f/
3
= (1
+ C3k) 1
-cosif¡
ivok sin(2rp)
(2.69)
1
4(8-A)
ivokcos(2rp)
4(8-A)
o
v6k 2p* cos(21,6)
ivokcosrp
o
8(8-A)
8-A
\f/4
= (1 +C4 k)l
_ivoksinrp
8-A
+
o
1
o
o
o
21
1
(2.70)
v6e p* sin(2<f>)
B(B-A)
' "k:,,.1
B-A
'!'5 = (1 +Csk)l
ivo:~~s<P
1
o
1+1
o
o
o
1
o
1
(2.71)
donde los Cn son constantes de normalización y k= (kcos<ft,ksin<ft). Se observa que cada uno de
los modos presenta contribuciones a todos los campos.
2.4.
Factores de estructura estáticos
Para determinar la intensidad de las fluctuaciones, calculamos los factores de estructura estáticos del sistema, definidos como
Ga,s(k) =v-I ('I'a(k)'I'fi(k)) =v-I ('I'a(k)'I',s(-k))
(2.72)
y que corresponden a las transformadas de Fourier de las correlaciones entre los campos, dadas por
Ga,s(x)
=~
J
dr ('I'a(r)'I',s(r + x))
donde la integral en r representa un promedio espacial y
factores de estructura cumplen la ecuación [20]
O
(2.73)
es un promedio sobre el ruido. Estos
L·G+G·Lt =C
(2.74)
donde
Ca,s(k)o(t- t')
= v- 1 ( 1Ju,(k, t)ry,s( -k, t'))
y se usó que
22
(2.75)
'l'~(k, t) =
J
dr '1' a(r, t)eik·r
= '1' a( -k, t)
(2.76)
ya que los 'I'a(r,t) corresponden a campos reales. Usando (2.3) y (2.21), vemos que
(~n (k, t)~m (-k, t')) =
J
dr¡ dr2d~1 dt/>2 e-in,P¡-ik·r¡ e-ümh+ik·r 2 (~(r¡, ~~, t)~ (r2, ~2 ,t'))
= ro(t-t') fdr¡d~¡ e-i(n+m),P¡
= 2nfVo(t-t')on,-m
(2.77)
Así, se calculan los elementos de la matriz de ruidos
e
(r¡1 '71 > = o
(2.78)
1
1 ( 1 1)
1 1
1
)
1
r
,
('72'72) = 4n2 ~1~1 = 4n2 \2i (~1 -~-1) 2i (~1 -~-I) = 8n2 <~1~-1) = 4n Vo(t- t)
1
1 ( RR)
1 11
1
)
1
f
(TJ3'73)=4n2 s\~1 =4n2\2(g1+q-¡)2(q1+q-1) =8n2(q¡q-1)=4nVc5(t-t)
1
1 ( 1 1)
1 1
1
)
1
r
,
(r¡4r¡4) = JT2 g2~2 = JT2 \ /~2 -~-2) /6 -q-2) = Jr2 (6~-2) = JTVo(t-t)
2
2
4
4
4
8
(r¡sr¡s) =
1
1 ( R R)
1 11
1
)
1
f
n ~2g2 = n2 \2(g2 -q-2)2(q2 -~-2) = Jr2 <6~-2> = JTVo(t-t)
4
4 2
4
8
(2.79)
(2.80)
(2.81)
(2.82)
1 ( R ¡)
1 11
1
)
i
(r¡2T]3)= 4n2 g 1 ~ 1 = 4n2\2(q 1 +~-I)2i(q 1 -g_ 1 ) =-16n2(-(q¡~_ 1 )+(q1 q_¡))=O
(2.83)
1 ( R ¡)
1 11
1
)
i
JT g2~2 = JT2 \2 (q2 +~-2) i (6 -q-2) = - Jr2 (-(~2~-2) + (q2~-2)) =O
4 2
2
4
16
(2.84)
(r¡4r¡s) =
Todos los Caf3 que invulucran gn y qm con n *±m resultan nulos. Luego, de (2.75),
o
o
e=~~
o
4 JT o
o
El hecho que C 11
oo
1 o
o 1
oo
oo
oo
oo
oo
1 o
o 1
= O es consecuencia de que la ecuación para op es exacta.
23
(2.85)
2.4.1.
Factores de estructura exactos
Para resolver la Ecuación (2.74), utilizaremos la forma tensorial de los factores de estructura,
los cuales tendrán un rango igual al de la multiplicación de los campos involucrados. Además, en
fase isotrópica, los tensores de rango par e impar serán pares e impares en k, respectivamente.
Recordando que, dado que todos los campos son reales, 6(-k) = 6*(k), se cumple que 6'I'a'I',s es
par (real puro) en k para af3 = 11, 22, 33, 44, 55, 14, 15, 23, 45 e impar (imaginario puro) para
af3 = 12, 13, 24, 25, 34, 35, donde los campos están numerados de acuerdo a (2.56). Usaremos,
entonces, que los 6'-P"' 'Pp tienen las siguientes formas tensoriales
6 opop(k)
~
GopT/k)
~
Gope1k(k)
~
= 61 (k)
(2.86)
~
kj
= iG2(k)k
(2.87)
~
~
kjkk
~
~
kjkk
= G3(k)6Jk + G4(k)--¡;;:¡-
(2.88)
GTJTk(k)
= Gs(k)6Jk + G6(k)--¡;;:¡-
(2.89)
~
~
~
(
) ~
k1kéz)
= ki ( G7(k)kJ6kz
+ Gs(k) kk6Jz + kzoJk + G9(k)¡z¡-
(2.90)
GT1ek1(k)
6e1ke1m(k)
= 6IO(k)OjkO!m + 6¡¡ (k) (Oj!cO!m + Oj[Okm + OjmÓk!) + 612(k) (Ojkkzkm + Ozmkjkk)
+ 613(k) (Ojkkzkm + Ozmkjkk + Oj!kkkm + Ojmkkkz + Ok!kjkm + OkmkJkl)
~
+ G¡4(k)
donde los
kjkkkzkm
k4
(2.91)
6n, n = l .. . 14 son funciones que sólo dependen del módulo k de k. Con esto,
6opop(k)
= 6¡(k)
(2.92)
= icoscp62(k)
6opTy(k) = isincp62(k)
6oPTx(k)
~
cos(2cp) ~
G4(k)
2
~ (k)
6 opG 1 (k) -_ sin(2cp) G4
2
6rxr/k) = 6s(k) + cos 2 cp66(k)
~
sin(2cp) ~
Grxr/k) =
G6(k)
2
~
(
~
coscpcos(2cp) ~
)
Grxe 0 (k) = i cosifJGs(k)+
G9(k)
2
Gope 0 (k)
=
24
(2.93)
(2.94)
(2.95)
(2.96)
(2.97)
(2.98)
(2.99)
A
GTxe 1(k)
A
GTyTy(k)
A
GTye0 (k)
A
GTye 1 (k)
=i
(
•
A
•
= Gs(k) + sm
=i
=i
cosif;sin(2if;)
G9(k)
2
A
A
smif;Gs(k) +
(
(
•
2
A
A
(2.101)
ifJG6(k)
A
-smif;Gs(k) +
A
cosif;Gs(k)+
sincpcos(2if;)
G9(k)
2
A
sinif;sin(2if;)
G9(k)
2
A
cos2(2if;)
G¡4(k)
4
Ge e (k)_- sin(2cp)cos(2if;) G14 (k)
0 1
4
sin2(2if;)
Ge 1e 1 (k) = G¡s(k) +
G14(k)
4
A
Ge0 e 0 (k)
(2.100)
)
A
A
= G¡s(k) +
A
A
)
)
(2.102)
(2.103)
(2.104)
(2.105)
(2.106)
donde G¡ 5 (k) = G 11 (k)+ G13(k). Notemos que la cantidad de funciones necesarias para caracterizar
el sistema se reduce al escribirJos factores de estructura en función de los campos 0o y 0¡, pues
todos los términos con ÓJk en e1k desaparecen. Reemplazando en (2.74) y resolviendo el sistema
de ecuaciones de 15x15, se obtiene
(;
(k)
1
= P¡ (k)
Q¡(k)
(2.107)
6 2(k) = P2(k)
(2.108)
6 4(k) = P4(k)
(2.109)
= Ps(k)
(2.110)
Q¡(k)
Q¡(k)
Gs(k)
Qs(k)
6 6(k) = P6(k)
(2.111)
= Ps(k)
(2.112)
Q6(k)
G (k)
8
Qs(k)
G9(k)
= P9(k)
G14(k)
= P¡4(k)
Q6(k)
Q6(k)
G¡s(k)
= P¡s(k)
Q¡s(k)
(2.113)
(2.114)
(2.115)
con los polinomios Pn y Qn dados por las expresiones (B.1) a la (B.9) y (B.10) a la (B.13), respectivamente. Resolviendo numéricamente la Ecuación (2.74) se obtienen la Figuras 2.6 y 2.7, donde
puede verse que la solución encontrada tensorialmente es correcta. Se observa, además, que existe
una separación de escala entre las intensidades de los distintos G'P"' 'Vfi"
25
Gopop
G""'·'
k
k
Gope 0
Go,.,.
k
k
Gope 1
GTx
T.\
k
k
GTx
GTx
Ty
®o
k
k
-41101
Figura 206: Factores de estructura G't'o:'f'ik, rp) en rp = n/6, para A= 10- 5 Los puntos corresponden a
la solución numérica de la Ecuación (2 74 ), mientras que la línea continua representa las Ecuaciones
(2086) a la (2091)0
o
o
26
GTy
Gr, e,
Ty
í
"'"1
k
Gry
0
'"
Gr,
0
ns
'"
k
01
k
k
Ge 0
0o
Ge, e,
"'
'"'"'!
k
001141
"·""'li
""J
11~
k
k
"'
Figura 2.7: (Continuación) Factores de estructura 6\va'Pf3(k,cp) en cp = n/6, para A= 10-5 . Los puntos conesponden a la solución numérica de la Ecuación (2.74), mientras que la línea continua
representa las Ecuaciones (2.86) a la (2.91).
27
2.4.2.
Solución aproximada para A y k pequeños
En la sección anterior se encontró la solución exacta para los factores de estructura estáticos
del sistema. Sin embargo, como se puede apreciar en el Apéndice B, su forma analítica hace que
sea extremadamente complicado realizar cálculos a partir de ellos. Luego, se hace necesario buscar
una simplificación.
La Ecuación (2.74) también puede escribirse como
M(k) · x(k)
= b(k)
(2.116)
con x = (6'P¡'l'p····G'P 1 'P5 ,Gq¡2 'f'p····Gq¡2 q¡5 , ••• ,Gq¡5 'f'p····G'P5 'Ps). La solución de (2.116) tendrá
la forma
det(Mn)
Xn
= det(M)
(2.117)
donde Mn es la matrix que se forma al reemplazar la columna n-ésima de M por el vector b.
Los factores de estructura se obtienen como transformadas de Fourier de las correlaciones, por
lo que la intensidad de éstas estará dominada por los polos de los Xn. Interesan, por tanto, los ceros
de det(M). Además, los efectos de gran longitud de onda estarán dados por los ceros del determinante con k pequeño. En particular, serán de importancia aquellos que se hacen pequeños a medida
que el sistema se acerca a la densidad crítica, i. e., cuando A se acerca a cero.
El detenninante de M será un polinomio en k 2 que puede escribirse en función de sus ceros
como
det(M) =M
n
(~- ~r"
(2.118)
n
donde mn corresponde a la multiplicidad de la raíz ~ del determinante, y M es una constante.
Calculando numéricamente los ceros de det (M) en función de A para A pequeño se obtiene que
aquellos que se anulan en A= O escalan como (ver Figura 2.8)
!?a= o
10' = -a¡A 2
JS, 3 = -a2,3A
Xn
(2.119)
(2.120)
(2.121)
De las soluciones exactas calculadas en 2.4.1 se puede ver que todos los numeradores de los
cancelan el polo ubicado en k= O. Introduciendo las expresiones anteriores en el determinante
28
k2
":':~ti'"~:~~~~··••••••••••••••••••••••••t
• ':>. x•Jó·.<·;:;;, .o.ooooJ·
'
'
<~
,,
~
. o.ooooJs
~
'·
10·
X
- J.
X!()'(,
X
~
.
•
'
k
10·
2
o
k 2
1
Jo- 6
ki
- 2. X JO.''
- 2.5
.-
'
7
- 5.
- 1.5 X
~
A
o.oooor
.............................
6
1
k
2
3
k
2
4
(a)
k2
o~-"1~"'==-;:.;<:¡¡j=------;----l-l.0-00-0J_ _ _
O.O_O_OIJ-J5_ _ _ _
0.1...,111bí!
- J.
X
Jo-'
- 2. X 10" H
- 3.
X
k,;
JO"'
k2
1
ki
- 4. X 10·'
1
- 5. X 10" 11
'!
ki
(b)
Figura 2.8: (a) Ubicación de las raíces más pequeñas de det(M) en función de A y (b) ajuste de
ellas con los valores de los a 11 (Ecuaciones (2.122) a la (2.124)).
29
y resolviendo analíticamente para los ceros al orden más pequeño en A para el caso D¡
encuentra
4
a¡
= O,
se
(2.122)
=2
vo
64 -12n
a2=---------------
(2.123)
a3=--------------
(2.124)
2(64 -12n)Do + (4 -n)v6
64 -12n
(64 - 12n)Do + (4 - n)v6
Por otra parte, analizando el comportamiento de los factores de estructura para k pequeño, se
observa que las intensidades máximas (;M de las funciones que los componen y los puntos kM
donde éstas se alcanzan escalan de la forma
AM
G¡ =
p*2~r
o
kM =0
(2.125)
6!j ~A-112
kM~ ik2i
(2.126)
AM
r
Gs = 8nA
kM =0
(2.127)
(2.128)
ctt ~ A-1/2
~ ~ lk2,3l
kM~ jk3j
G~ ~A-112
kM~ ik23i
(2.130)
AM
r
G¡s = 8nB
kM =0
(2.131)
4nA (2ADo +
6;Y ~A-
v6)
1
(2.129)
donde no fue posible obtener una expresión simple para G4 y G¡4; sin embargo, veremos más
adelante que estas funciones no son relevantes para los efectos que se desea estudiar. Luego, existen
intensidades que divergen cuando A --7 Opara algunos campos, haciendo que las correlaciones entre
ellos se hagan arbitrariamente grandes al acercar el sistema a la transición nemática. Se debe notar
que tanto p* como B dependen de valor de A; sin embargo, cuando éste es pequeño ambos pueden
tratarse como independientes al orden dominante, por lo que 6 15 no diverge. Además, 6 1 decae
con el polo en k2 y Gs con el polo en k3, mientras que G¡s evoluciona más lentamente, dependiendo
de un polo mayor k*. Así, escribimos de manera aproximada
G¡(k)
~~nA
*2r [
1
1 )
+qª
[_!1}:_)
1+qª
62 (k)~l:hrA -1/2
Ós(k)
~ s:A L:qj l
30
(2.132)
(2.133)
(2.134)
q2 ) (___!j}___)
G6(k) ~ g6rA-i ( 1 +q~
1 +q~
(2.135)
G8 (k) ~ @sfA -1/2 (___!j}___)
1 +q~
(2.136)
G¡s(k)
~ 8:B ( 1 +1q*2)
(2.137)
donde qn = k/lknl, y los @n son constantes que no dependen de A. Nuevamente, no fue posible
determinar la dependencia de G9 con los qn, pero esta función tampoco será necesaria. Numéricamente se ve que la ubicación de k* es esencialmente independiente de A para A pequeño, y se puede
encontrar este punto notando que
=o
iPG¡sl
ok2
k=k*/
(2.138)
V3
Coll_§_iderando el caso A = D¡ =O y derivando la Ecuación (2.115) se encuentra que, analíticamente, k corresponde a la solución real positiva de la ecuación
O= -B(4BDo +v6) (32B D6 + 30BDov6 + 5v6)+ 6Do (-64B D~ + 68B D6Vo +40BDov6 + 5v~)J?
2
3
2
+24D~ (32B 2D6 + 74BDov6 + 15v6)k4 +448Db (8BDo + 3Vo)k6 +3072D6k8
(2.139)
la cual se muestra en (C.l) y da como resultado k* ~ 15.5 para vo = 0.2, Do= 0.03. Graficando,
para distintos valores de A, las expresiones (2.132) a la (2.137) se obtienen las Figuras 2.9 a la 2.14.
Se grafica G¡s en un dominio más grande, tal que su decaimiento sea notorio. Podemos ver que se
reproducen correctamente el escalamiento y orden de magnitud observados en cada caso.
31
A
G1
G1
]()()~1000
!({)¡
'
(i()¡
(¡(1()1·
401
4()(11
20'
200
1
',
0.4
1~0 k
()(,
1
0.4
(a) A= 10-2
(b) A=
1:n
k
1.0
k
¡o- 3
A
G1
G1
10010101
1111100!1
].{)()()(}
0.4
0.6
0.~
\0
k
1
02
Figura 2.9:
'"
1'!>
(d) A= 10- 5
(e) A = 10-4
G1 exacto (azul) y aproximado (rojo) para distintos valores de A.
G2
G2
1
O.(i
0.2
0.1(
10
k
0.2
0.4
1.0
k
-o.sl
-0.01
-0.\l!
.----->
(b)A=10- 3
(a) A= 10-2
A
G2
G2
().4
_,
----=----
1
()(,
1.1o
k
-5
-lO
-4!
-15
-20
-15
-<1
(e) A= 10-4
Figura 2.10:
i
(d) A= 10- 5
G2 exacto (azul) y aproximado (rojo) para distintos valores de A.
32
Gs
Gs
;1
1
20
'"
1
1
10
k
os
02
(a) A= 10-2
(b) A=
Gs
1~0 k
10-3
Gs
2000
02
04
116
fU\
1.!;
i
k
02
(d) A=
(e) A= 10-4
Figura 2.11:
04
06
O.H
10-
k
10-5
G5 exacto (azul) y aproximado (rojo) para distintos valores de A.
A
A
G6
G6
0.2
"'
04
" )~() k
1.0
0.4
k
(b) A= 10-3
(a) A= 10-2
A
G6
G6
02
1.6
O.H
1:0
k
0.6
()8
):()k
101
zol,
(e) A= 10-4
(d) A = 10-s
Figura 2.12: G6 exacto (azul) y aproximado (rojo) para distintos valores de A.
33
Gs
(]007
0005
0.004
(1 00~
11002
02
1~0-
/o k
'"
(a) A= ¡o-2
0.4
(b) A=
w-
k
3
Gs
!1.!1711
0.06.
(1
()~
!·.
0\5
1~0 k
0.6
(d) A =
(e) A= 10-4
Figura 2.13:
~
!16
02
'
""
w-s
10
k
Gs exacto (azul) y aproximado (rojo) para distintos valores de A.
Gts
Gts
o.oosl1
0.004¡·
0.(103
'
00021
1
0.001:
().()()]
ro
(a) A=
1
20
15
k
20
w-2
(b) A=
w-
(d) A=
10-5
k
3
A
G¡s
Gts
O.(HI51·
0004
0.()(0
0003!~-"'
0002
0.002:
'"10'1
]()
15
1~
2!1 k
15
(e) A= 10-4
Figura 2.14:
2~; k
G¡s exacto (azul) y aproximado (rojo) para distintos valores de A.
34
Capítulo 3
Temperatura activa
1
Resumen
En este capítulo, se encuentra una exprekión para la temperatura activa de la
suspensión bacteriana en función de la ehergía cinética del fluido, a partir de
la expresión para el campo de velocidades inducido por las bacterias en él.
Esta temperatura presenta dos contribuciones: una de ellas es un término de
autoenergía, correspondiente a la correlabón de una bacteria consigo misma;
mientras que la otra representa las correlaciones entre bacterias diferentes. La
primera de estas contribuciones diverge logarítmicamente con el tamaño del
sistema en dos dimensiones, mientras qu'e en el caso tridimensional posee un
máximo que depende únicamente de las ~scalas microscópicas.
1
1
1
1
1
Por otra parte, la expresión encontrada paia la contribución de las correlaciones
a la temperatura activa es independiente del modelo y corresponde a
Tcorr ex:
Jdk
G¡s(k)
k2
donde G¡ 5 es una de las funciones escalares que componen los factores de
estructura del sistema. Utilizando, luego, el resultado obtenido a partir del
modelo del Capítulo 2 para esta función, se encuentra que la contribución de
las correlaciones crece cuadrática y linealmente para sistemas pequeños en
dos y tres dimensiones, respectivamente; para sistemas grandes, en cambio, se
encuentra la misma dependencia que la de la autoenergía.
3.1.
Introducción
Las bacterias, al nadar, agitan el fluido induciendo un campo de velocidades en él. Queremos
calcular la temperatura del fluido, la cual es una medida de esta agitación. Si bien el sistema se encuentra fuera del equilibrio termodinámico, es posible definir una "temperatura activa" en función
35
-
su energía cinética promedio. Para un sistema termodinámico de N partículas se sabe que
-
N
(K)= d2kBT
(3.1)
donde K corresponde a la energía cinética, d a la dimensión del espacio y T a la temperatura,
mientras que kB es la constante de Boltzmann. Para el caso del fluido considerado, dividiendo por
el número de partículas de éste, se obtiene
dkBTact
22
1
= 2 (K)
N =N
=m~
f
dr
I (-
dr p(r)u 2 (r) )
(u2 (r))
(3.2)
con p = mN /V la densidad del fluido, que se supone incompresible, y
de éste.
m la masa de una partícula
Necesitamos una expresión para el campo de velocidades u(r) del fluido. A bajo número de
Reynolds, la hidrodinámica está descrita por las ecuaciones de Stokes, que relacionan los campos
de presión y velocidades de la forma
-Vp+7]V2 v+F =O
(3.3)
V·v=O
(3.4)
donde 17 es la viscosidad del fluido y F la fuerza aplicada a éste por unidad de volumen. Queremos
encontrar una solución para este sistema tanto en dos como en tres dimensiones. Para el caso
particular de una fuerza puntual se tiene, por linealidad, [6]
F¡
p
= F/5(r)8¡j
=PjFj
(3.5)
(3.6)
(3.7)
V¡= 'B¡jFj
con 'B¡j el tensor de Oseen. Reemplazando las expresiones anteriores en (3.3) y (3.4),
=o
(3.8)
o¡'Bu =O
(3.9)
-o¡pj + 1Jou'Bu + o(r)ou
Transformando en Fourier estas ecuaciones, con la convención definida en (2.53), se obtiene
=o
ik¡Bu =o
-ik¡h -1]1?-Sij + Oij
36
(3.10)
(3.11)
Multiplicando (3.10) por k¡ y usando (3.11)
ikj
Pj=-k2
(3.12)
Reemplazando lo anterior en (3.10),
A
S¡j(k)
1 (
= 1Jk2 ou-
k¡kj)
k2
(3.13)
Con este resultado se obtiene, a partir de (3.7), el campo de velocidades generado por una fuerza puntual en un fluido a bajo Re.
Por otra parte, la perturbación que ejerce una bacteria sobre un fluido a bajo Reynolds se puede
interpretar, a primer orden, como un dipolo de fuerza puntual de intensidad ero (que posee unidades
de energía), de tal manera que el campo de velocidades inducido por ella en el fluido es [7]
U¡(r)
= Bij,k(r- ro)S jk
(3.14)
donde ro es la posición de la bacteria y S jk el stresslet producido por ella, definido como
S jk = cron¡nk
(3 .15)
con n el vector director de la bacteria. Supongamos, ahora, un volumen V de fluido con N bacterias,
cuyas posiciones y orientaciones denotamos por r(n) y u(n) (n = l .. .N), respectivamente. El campo
de velocidades del fluido estará dado por
u¡(r)
=
J
dr' Bij,k(r- r')sjk(r')
(3.16)
V
donde Sjk(r) es, ahora, una densidad de stresslet en el punto r debida a todas las bacterias, i.e.,
N
Sjk(r)
= .L:croo(r-r(n))n)n)nkn)
n=l
37
(3.17)
3.2.
Cálculo de la temperatura
Utilizando las ecuaciones (3 .2) y (3 .16),
Tact
= dl:B ~
JJ J
dr
dr¡
dr2 Bij,k(r- r¡ )Bu,m(r- r2) (sj!,(r¡)szm(r2))
(3.18)
Los s jk son simétricos en jk, por lo que sólo importará la parte simétrica en estos índices de
BiJ,h a la que denominaremos Fijk· De la ecuación (3.13), la transformada de Fourier de la derivada
de B¡j queda
sij,k(k)
= ryk2
ikk (o·. k¡kj)
l j - k2
(3.19)
y, con esto, se obtiene
~
i (
k¡kjkk)
P.·"(k)
=
- k·o·"+ho··-2-lj
2ryk2
J l
" lj
k2
(3.20)
Calculando la antitransformada de Fourier de la expresión anterior, Fijk(x), mediante el procedimiento detallado en el Apéndice D, se encuentra
1 X¡ (
XjXk)
2D
-4 2 Oj!c- 2-2
7r7] X
Fijk(x)
X
=
(3.21)
1 x·z (
8nry x3 Oj!,- 3
x·xk
~2
)
:
3D
Notemos que esta expresión es simétrica y tiene traza nula en los índices jk. Por otra parte, Sjk(r)
se relaciona con los campos macroscópicos obtenidos promediando localmente (coarse-graining)
de la forma
Sjk(r)
= crop(r)0j!,(r)
(3.22)
Al orden dominante en los campos fluctuantes,
(s jk(r¡)Szm(r2))
= c?o ((p* + Op(r¡)) ( ~Ojk + ejl,(r¡)) (p* + op(r2)) ( ~Ozm + G¡m(r2)))
p*2
p*
= cTJo [ ¿¡OjkOfm + cf2. (op(r¡)c5p(r2)) OjkO!m
+ ~ (Cop(r¡) + op(r2)) (ejk(r¡)ozm + Gtm(r2)ojk )) + p* 2 ( ejk(r¡)G,m(r2))]
(3.23)
38
De (3.18), como F¡¡k(x)ó¡k =O,
Tact
=
;B
aip*
2
~ Jdr Jdr¡ Jdr2Fi¡k(r-r¡)Fum(r-r2)(G¡k(r¡)Gtm(r2))
(3.24)
Es interesante notar que la cercanía del sistema a la inestabilidad nemática no debería tener un
efecto importante sobre Tact, pues las fluctuaciones en la orientación local T de las bacterias 1!_0
contribuyen a la energía cinética del fluido, y sólo interesan las correlaciones entre los campos 0,
cuyas transformadas de Fourier corresponden a los factores de estructura Ge1ke1m. Sin embargo,
estas correlaciones no dan cuenta de las contribuciones individuales de las bacterias a la energía
cinética del fluido, las cuales existen aun en ausencia de fluctuaciones. Esto se debe a que la correlación de una bacteria consigo misma se pierde al hacer el coarse-graining en orientación previo al
cálculo de la correlación. Microscópicamente,
S¡k(r¡ )stm(r2)
c5(r¡ - r(n))ó(r2- r(m))n)n)nkn)n~m)n~1 )
= ai I
n,m
= ai [ó(r¡ -r2) Ió(r¡ -r(n))n)n)nkn)n~n)n~) + Ió(r¡ -r(n))ó(r2 -r(m))n)n)nkn)n~m)n~m)]
n
= aió(r¡ -
#m
ó(r¡ - r(n))n)n)nkn)njn)n~) +correlaciones
r2) I
(3.25)
n
donde el segundo término representa las correlaciones entre los campos promediados macroscópicamente. Reemplazando en (3.18),
Tact
f f
= -d1
iii(B o-6
N
dr
dr¡ E¡¡k(r-r¡)E¡¡ m(r-r¡) ~ ó(r 1 -r(n))n(n)n(n)n(n)n(n) + T
'
L...J
'
j
k
¡
m
corr
n
= diii(Bl V
dr
o-6 L...J
~J
n
iii(B -V
o-6
= -d1
If
n
-
=
2
;_B ~ I
f
dr¡ E¡¡ k(r -r¡)E¡¡ m(r -rl)ó(r¡- r(n))n(n)n(n)n(n)n(n) + T
'
'
j
k
¡
m
corr
drE¡J·k(r-r(n))n(~)n(n)-;:.l
(r-r(n))n(n)n(n)+T
'
J
k ~z ,m
¡ m
corr
J
drE¡¡,k (r -r(n))n)n)nkn)Eil,m (r- r(n))n~n)n~) + Tcorr
n
-- dk
iii V1 L...J
~Jdr U 2 (r) + Tcorr
B
_m
N
- dkB V
n
fdr u2(r) + Tcorr
= Tself + Tcorr
(3.26)
donde Tself corresponde a la contribución microscópica de las bacterias a la energía cinética y Tcorr
a las contribución macroscópica debida a las fluctuaciones, dada por la ecuación (3.24). Desarrollando,
39
Tcorr
m c?aP*2 V1
= dks
JJ J
dr
dr¡
(- - )
dr2Fijk(r- r¡)Fum(r- r2) E>jk(r¡)0tm(r2)
(3.27)
= :_B c?ap* 2~ Jdr Jdx Jdr¡Fijk(r-r¡)Fum(r-r¡ -x)(e1k(r¡)Btm(r 1 +x))
(3.28)
m c?ap* 21V
= dks
(3.29)
= dl:s c?ap* 2
JJ
(- -
dr¡ Hjktm(x) 0j!,(r¡)0¡m(r 1 +x)
dx
)
J
(3.30)
dxHJklm(x)Ge1ke1m(x)
con
J
Hjklm(x)
=
Hjklm(k)
= ft;1k(k)Fum(k)
dy Fijk(y)Fum(Y- x) =
J
(3.31)
dy F'ijk(y)Fum(Y- x)
(3.32)
Utilizando (3.20) se obtiene
~
Hjklm
1 [1
= 4r¡2k2
k2 (kjktOkm+kJf(m0kt+kkktOjm+kkkmOJl)-4kjk~¡km
l
(3.33)
Volviendo a (3.30) se encuentra que, en d dimensiones,
Tcorr
m CJQP
2 *2 - -1d
= -dl
(B
(2n)
m CJQP
2 *2
1
= dks
( n)d
2
m CTQP
?. *
1
= dks
( n)d
2
2
J
dxHj!dm(X)
J 0~
J
J
dk e1kelm(k)
~
~ ke1 (k)
dke ik·x Ge
J
l
m
dxeik-x Hjk!m(X)
~
dkGe1~ce 1m(k)Hj!dm( -k)
(3.34)
Usando la forma tensorial de Ge1kelm presentada en la Sección 2.4,
Ge1kelm (k)
= ÓIO(k)OjkO!m + G¡¡ (k) (OjkOtm + OjtOkm + OjmOkt) + G12(k) (Ojétkm + Otmkjkk)
+ G13(k) (ó}étkm + O¡mkjkk + Ojlkkkm + Ojmkkkt + Oktkjkm + Okmkjkt)
~
+ G¡4(k)
con G¡¡ + G13
kjkkktkm
(3.35)
'A
= G¡s, se obtiene
T
-
2 *2
_ .!!!._ a-op
corr - dl<:s 1]2
~
d -1 Jdk G 15 (k)
(2n)d
k2
40
(3.36)
Se debe destacar que la expresión para Gejketm es general, por lo que el resultado obtenido en
(3.36) para la contribución de las fluctuaciones a la temperatura del sistema será independiente del
modelo hidrodinámico utilizado para los campos.
Por otro lado, en dos dimensiones,
T2D
self
= ...!!!._0"2 N
1
2kB o V 16n2r¡2
m0"6p*
= 32n2kBr
f
1 (
(x. ni
dx x2 1-2~
)2
J ~J
dx
1
dcf¡ ( 1 -2 cos2 cP )2
m0"2 *
_
oP (L)
- 32nkBr log ;;
(3.37)
donde se ha usado que N/ V= p*, y se ha integrado entre un x mínimo Xmin =a y un x máximo
= L, con L el tamaño del sistema y a un cut-off microscópico correspondiente a la escala en
que las bacterias inyectan energía a éste. Repitiendo el cálculo en tres dimensiones, se obtiene
Xmax
f
f
= iii~p* f
T3D - ...!!!._0"2
N
1
self- 3kB O V 64n2ry2
96
nkB7J2
1
dx x2
dx _!_ ( 1-3 (x. n)2)2
.:0
x2
2 2
de ( 1 - 3 cos e)
= llm0"6P* (~ _ .!.)
768kB7]2 a
(3.38)
L
Así, la contribución microscópica de las bacterias a la energía cinética del sistema diverge
logarítmicamente con el tamaño de éste en 2D, mientras que en 3D no presenta divergencia, siendo
dominada por las escalas pequeñas.
3.3.
Resultado para
Tcorr
a partir del modelo
Tenemos, en la ecuación (3.36), una expresión general para Tcorr, la cual depende del modelo
hidrodinámico sólo a través del valor particular de G¡ 5 (k) en dicho modelo. En el modelo bidimensional presentado en el Capítulo 2, esta función está dada por (2.115), y vimos que es posible
aproximarla de manera que
r
G¡s(k)
1
~ 8nB ( 1 + ~22)
Luego,
41
1
(3.39)
2
2
Tcorr
- cr p* r d- 1
- ..!!!_ o
- dks 8m¡2 B (2n)d
f
1
1
dk--k2 ( 1 + ~~22)
(3.40)
Notemos que los k son de la forma 2n/x, con x en espacio real. Luego, siL representa el tamaño
del sistema, i.e., es la escala más grande posible, entonces existe un k mínimo dado por km in= 2n /L.
Además, la expresión anterior converge para k ----7 oo tanto en dos como en tres dimensiones, por lo
que no será necesario introducir la escala microscópica a.
Por otra parte, como B y k* no corresponden a parámetros críticos en nuestro modelo, este
resultado será esencialmente independiente de qué tan cerca de la transición nemática se encuentre
el sistema, i.e., no presentará divergencia cuando A ----7 O, lo cual es consistente con el hecho que
no existe contribución a la energía cinética del fluido por parte de las fluctuaciones en el vector
director local. Por lo tanto, no es posible aumentar la temperatura activa a voluntad por medio de
la modificación de la densidad numérica promedio de bacterias.
Finalmente, extenderemos este resultado al caso tridimensional valiéndonos del hecho que las
expresiones en espacio de Fourier son independientes de la dimensión, y que esta dependencia sólo
aparece al aplicar la antitransformada definida en (2.54). Así, calcularemos Tcorr en 3D a partir de
(3 .40), donde se ha utilizando la expresión para G¡s del modelo 2D.
3.3.1.
2D
De la ecuación (3.40),
-
2
- .!!!._
Tcorr -
cr p*
o
2
r
kB 32n2r¡2 B
J
1
1
dk - -----::--:k
(1 + .!C)
~2
To 1
= -2
og (1 + _1_k*2
4n2 L2)
(3.41)
con
- zp *zr
mcr
0
To
= 32n2ksr¡2B
(3.42)
Podemos ver que el comportamiento de este resultado en función del tamaño del sistema depende de la relación entre éste y la escala definida por k*, por lo que analizaremos su comportamiento
en casos límite.
Sistemas pequeños, L « k*- 1
Cuando el tamaño del sistema es mucho más pequeño que la escala en que decaen las correlaciones dadas por G¡ 5 , la expresión encontrada en (3.41) toma la forma
42
Tcorr
To
/
/
/
/
/
/
/
/
1
1
1
1
1
1
o
2
4
6
8
L
Figura 3.1: Solución exacta para Tcorr en dos dimensiones en función deL =k* L/2lf (rojo), junto a
las expresiones obtenidas para tamaños grandes (azul) y pequeños (verde).
Tcorr
To
1 1 *2L2
87f2
--~-¡(
(3.43)
Se debe notar, sin embargo, que con los valores utilizados para va, Do y D¡ no es posible alcanzar este régimen de tamaños pequeños, pues la escala definida por k* en espacio real toma el
valor 27f1k* ~ 0.4, donde las unidades están dadas por el largo l de las bacterias, según la ecuación
(2.25). Por lo tanto, este caso se incluye sólo como referencia, y puede darse para algún otro tipo
de nadador con distinta geometría y velocidades de propulsión.
Sistemas grandes, L » k*- 1
Para el caso de tamaños grandes, se obtiene que el término dominante en (3 .41) conesponde a
(k*L)
2lf
Tcorr
--~log-
To
(3.44)
Recordando, de (3.37), que Tse!f en dos dimensiones escala logarítmicamente con el tamaño
del sistema para cualquier valor de éste, notamos que el efecto de las con-elaciones en la energía
cinética del fluido crece rápidamente en comparación a la contribución microscópica para tamaños
pequeños; mientras que para sistemas grandes este efecto se regulariza, siendo ambas contribuciones del mismo orden en función de L.
43
3.3.2.
Extensión a 3D
En el caso tridimensional, la ecuación (3.40) queda
1
=-;
To
k
Tcorr
f
1
dk(--2:_)
1 + k*z
= ~ -arctan(~~)
(3.45)
donde, ahora,
To
m(J"6P*2rk*
= ---=--24n3kB1J2 B
(3.46)
Sistemas pequeños, L « k*- 1
Para tamaños pequeños se encuentra, a partir de (3 .45),
Tcorr
To
~ J_k*L
2n
(3.47)
Sistemas grandes, L » k*- 1
Ahora, para tamaños grandes,
Tcorr
7f
To
2
2n
k*L
(3.48)
Análogamente al caso bidimensional, la contribución de las correlaciones a la energía cinética
del fluido crece más rápido que la de la autoenergía en función del tamaño del sistema paratamaños pequeños. Para tamaños grandes, en cambio, ambas contribuciones resultan esencialmente
independientes deL, y la de origen microscópico será la dominante si k*- 1 »a, i.e., si la escala
definida por k* es mucho más grande que la escala de inyección de energía.
44
Tcorr
To
1
/
/
1
1
1
o
'
1
1
1
3
2
4
5
6L
Figura 3.2: Solución exacta para Tcorr en tres dimensiones en función deL= k* L/2n (rojo), junto
a las expresiones obtenidas para tamaños grandes (azul) y pequeños (verde).
45
Capítulo 4
Correlaciones espaciales de velocidad
Resumen
En este capítulo, se calcula el tensor de correlaciones espaciales del campo de
velocidades inducido por las bacterias en el fluido. Éste se puede descomponer
en correlaciones longitudinales y transversales, siendo estas últimas las que
permiten obtener información acerca de la formación de vórtices en el sistema.
En efecto, un cambio de signo en las correlaciones transversales dará cuenta
de la presencia de vórtices, mientras que el tamaño característico de dichos
vórtices estará dado por la posición donde las correlaciones transversales
alcanzan su valor mínimo.
A partir del campo de velocidades producido en el fluido por las bacterias,
se encuentra una expresión general para el tensor de correlaciones, dado en
espacio de Fourier por
gij(k)
= gj_(k) ( Oij- k¡kj)
k2
1
1
gj_ (k) = !1 k2 { 1 + .fs!_
k*2
donde !1 = o-6p* 2 r /8nB1]2. Utilizando el modelo descrito en el Capítulo 2,
se obtiene que éste predice la formación de vórtices en el sistema, cuyo
tamaño escala linealmente con el tamaño de éste. Este comportamiento es,
cualitativamente, el mismo en dos y tres dimensiones.
4.1.
Introducción
Nos interesa calcular, ahora, las correlaciones espaciales de velocidad del fluido, a partir de
las cuales podemos determinar la aparición o no de vórtices en el sistema. Dichas correlaciones se
46
definen como
gíJ(x) =
+J
(4.1)
dr ( u¡(r)u1(r + x))
Para un sistema isótropo, una forma general de descomponer giJ es
X¡Xj)
X¡Xj
gíJ(x) = g_¡_(x) (OiJ ----¡¡:- + g¡¡(x)--¡¡-
(4.2)
donde g_¡_ representa las correlaciones de velocidad en la dirección transversal a la distancia, mientras que g 11 corresponde a las correlaciones longitudinales. Un cambio de signo hacia valores negativos en estas funciones es una señal de la existencia de escalas en las cuales el campo de velocidades
del fluido se encuentra anticorrelacionado. En particular, valores negativos de g_¡_ darán cuenta de
la formación de vórtices en el sistema, mientras que la posición en que se alcanza su valor mínimo
corresponderá al tamaño característico de dichos vórtices. Analizamos el comportamiento de estas
correlaciones tanto en dos como en tres dimensiones en función del tamaño del sistema.
4.2.
Cálculo general
Utilizando (3.16) podemos reescribir la ecuación (4.1) como
g¡J(x)=
~ Jdr Jdr¡ Jdr2Sik,!(r-r¡)SJm,n(r+x-r2)(skl(r¡)smn(r2))
(4.3)
de donde identificamos
dkBTcorr
=g¡¡(Ü)
(4.4)
Así, es fácil ver de (3.34) que
~
gíj(k)
2 *2
= OQP
Gekt8m
~
~
11
(k)H¡jklmn( -k)
(4.5)
con
f¡ijklmn(k)
= P;k¡(k)Fjmn(k)
1 [1
= 4r¡2k2 k2 (kkkmOjnO¡¡ + kénOjmO¡¡ + k¡kmOjnOi!c + k¡knOjmOik)
_3._
k kk k k k k
)
k¡/(kklkjkmkn
k,4 (kkk·k
J m n + l j m n + m ¡kkkl + knkikkl(f + 4
¡,6
47
j
(4.6)
Reemplazando la expresión anterior en (4.5) y desarrollando, se obtiene
_ cr20p *2 G~ 15 (k)
r¡2
k2
~
(
g¡j(k) -
o·. _ kk
_!_}_ )
k2
lJ
=gj_(k) ( O¡J- k·k·)
k2
~
l
}
(4.7)
Nuevamente esta expresión es independiente del modelo hidrodinámico utilizado para los campos involucrados. Además, se debe destacar que, al igual que en el caso de la temperatura, g¡J sólo
depende de las correlaciones representadas por 61 5 , resultando irrelevante cualquier otro tipo de
estructura entre las bacterias.
Por otra parte, notamos que en espacio de Fourier las correlaciones de velocidad sólo tienen
componente transversal; sin embargo, esto no necesariamente se replicará en el espacio real. Para encontrar la antitransformada de (4.7), usamos la ecuación (4.2) y repetimos el procedimiento
descrito en el Apéndice D, encontrando el sistema de ecuaciones
(d -1)gj_(x) + g¡¡(x)
g¡¡(x)
4.3.
= (d -1)~ Jdkeik·xgj_(k)
(27!")
= - -1d
(2n)
f dkeikx~· gj_(k) (
(k·xf)
-
1- -
k2x2
=h(x)
(4.8)
=h(x)
(4.9)
Resultado a partir del modelo
Utilizando la expresión obtenida previamente para 6 15 , queda
1
gj_(k)
1
= !-:..k2 {1 + :.22
(4.10)
2
donde !'-:.. = c?Qp* r f8nBrj2. Con esto, y las ecuaciones (4.8) y (4.9), calculamos las correlaciones
de velocidad tanto en dos como en tres dimensiones en los casos límite para el tamaño del sistema,
L « k*- 1 y L » k*- 1•
4.3.1.
2D
Sistemas pequeños, L « k*- 1
Para el caso de tamaños pequeños, se tendrá que km in = 2n 1L » k*, por lo que solamente los k
grandes contribuyen a las integrales. Así, podemos aproximar
48
gj_(k)
~
k*2
/'-,.1(4
(4.11)
Las ecuaciones (4.8) y (4.9) en dos dimensiones toman la forma
l¡ (x)
~ ~k* 2 Jdkfdt,beikxcosrp_!__
(4.12)
JJ
(4.13)
(2n)2
2
f..
h(x) ~ --k*
2
(2n)
dk
k3
·2 tP
dt,Veikxcosrpsm
k3
Integrando las expresiones anteriores entre kmin e infinito, se obtiene
2
2 4
22
2
2 + 8x2 log (7fX)
,. nk*- [4L
nx 2F3 ( 1 1· 2 3 3· -n x
l¡(x) ~ -/'--+
8(y-1)x
(2n)2 16 n 2
L
L2
' ' ' ' ' L2
(4.14)
2 +12x2 log/'-,. nk* [ --+3(4y-5)x
12L2
(nx) --2F3
~x
(
I2 (x)~---11·2 3 4 ·~x2
- - )]
(2n)2 96
n2
L
L2
' ' ' ' ' L2
(4.15)
)l
4
2
Donde 2F3 es la Función Hipergeométrica Generalizada y y= 0.577216 ... la constante de
Euler-Mascheroni. Notemos que en el límite de distancias muy cortas (x --7 O) se cumple
- _1- lím l¡
2mkBTo x--->0
= _1_k*2 L 2 = Tcorr
8n2
To
(4.16)
por lo que se recupera el resultado obtenido en la Sección 3.3.1 para Tcorr en el caso L « k*- 1 .
Por otra parte, se tiene de (4.8) para la correlación transversal,
f.. nk*2[12L2
(nx) +
~x4
x2 )
g.l(x)~-- 2-+3(12y-ll)x2 +36x2 log- [ 2F3 ( 1,1;2,3,4;-(2n) 2
n
L
L2
4L 2
96
-62F3(1,1;2,3,3;-
:~2 )]]
(4.17)
Graficando las funciones correlación (ver Figura 4.1) se observa que existen zonas de valores
negativos en g.1_, por lo que el modelo predice formación de vórtices en dos dimensiones cuando
L « k*. El tamaño característico xv d~ los vórtices, correspondiente a la posición del mínimo
negativo de g.1_, se grafica en función deL= k* L/27!.._ en la Figura 4.2, observándose un escalamiento
lineal. La pendiente de la curva xv =k* xv /2n vs. L corresponde a
xv
~
0.39L
49
(4.18)
g"
g.L
L
X
X
Figura 4.1: Funciones de correlación de velocidades transversal y longitudinal en dos dimensiones
cuando L « k*- 1. Importa observar los cambios de signo, por lo que la escala vertical es irrelevante.
xv
0.20
0.15
0.10
0.15
0.20
0.30
o.so L
Figura 4.2:_Tamaño característico de los vórtices (puntos azules) en 20 cuando L « k*- 1 y ajuste
lineal con L (línea roja).
50
Sistemas grandes, L » k*- 1
Para tamaños grandes se tiene que km in «k*, por lo que contribuyen al¡ e ]z tanto los k grandes
como los pequeños. Escribimos, entonces, de manera aproximada
!!:2
gj_(k) ~
k< k*
(4.19)
k*2
\ ! !¡¿+-
k> k*
Luego,
11(x)
~~
[ Jk* dkfd<t>eikxcosl¡!>~ +k*2 Joodkfd<t>eikxcosl¡!>_!_1
(2Jr)2
k
k
(4.20)
~~
[ Jk* dkfd<t>eikxcosl¡!>sin2
(27r)2
k
(4.21)
3
kmin
]z(x)
k*
kmin
</>
_
+k*2 Joodkfd<t>eikxcosl¡!>sin2 </>]
k3
k*
de donde se encuentra
JTk*2
( 1,1;2,2,2;-x2k*2)J
L 2 2F3 ( 1,1;2,2,2;- ~x2) -42F3
l¡(x)~ ( fl7r) 2 [ 2Jrlog (k*L)
JT +x2 [JT3
2
4
0
2
2 2
4
2 2
[64+ 32k* x [cr-1) + log(
J-k* x4 2F3 ( 1, 1;2,3,3;- x :* )]]
(4.22)
+
~
k~x)
x2k*2)J
]z(x)~ ( !!
7r) [ Jrlog (k*L)
JT +x2 [ ~
L 2F3 ( 1,1;2,2,3;- JT2X2) - JTk*2 2F3 ( 1,1;2,2,3;-2
16
4
2 2
4 2
0
2 2
4 4
2 2
+ ; [ 192 + 12k* x [(4y- 5) + 4log( k;x) J-k* x 2F3 (1, 1;2, 3,4;- x :* )
(4.23)
l
3 4
En este caso, cuando x
---7
O,
1
,
(k*L) +-=--+1 Tcorr 1
---hml¡=log2mksTo x-.o
2JT
2
To
2
(4.24)
Vemos que no se recupera el resultado de la Sección 3.3.1, existiendo una contribución extra.
Esto puede deberse a que la aproximación definida en (4.19) pierde validez para k cercanos a k*. A
pesar de esto, se mantiene la dependencia logarítmica en k* L.
De (4.8),
51
g,
g_,_
L X
L
X
Figura 4.3: Funciones de correlación de velocidades transversal y longitudinal en dos dimensiones
cuando L » k*- 1 . Importa observar los cambios de signo, por lo que la escala vertical es irrelevante.
r (k*L)
(
JT2X2)l
g1_(x)~ ( ~n) 2 [JTlog
JT +x2 r[ 7!'3L 2 r[4~3 (1,1;2,2,2;- JT2X2)
L 2 -2F3 1,1;2,2,3;2
4
2
0
¡42F3 (1, 1;2,2,2;-x2k*2)
( 1, 1;2,2,3;-~k*2)
- - jl]
4
4
2k*2)
+ JT ¡192+12k* ~ ¡(12y-11)+12log (k*x)l
T +k* x ¡ (1,1;2,3,4;-~
384
JTk*2
-~
2F3
2
4 4
2
k*
-62F3 ( 1,1;2,3,3;--4
X
2
)lll
JJJ
2F3
(4.25)
En la Figura 4.3 se muestran las funciones correlación para el caso L »k* y se observa que,
al igual que en el caso anterior, existe formación de vórtices. El tamaño de estos también escala
linealmente con el tamaño del sistema en este caso, como puede verse en la Figura 4.4. En este
caso, se obtiene
xv ~ 0.29L
4.3.2.
Extensión a 3D
Sistemas pequeños, L «
k*- 1
Utilizando (4.11 ),
52
(4.26)
xv
!50
100
70
50
150
son
300
200
L
Figura 4.4:_Tamaño característico de los vó1iices (puntos azules) en 20 cuando L » k*- 1 y ajuste
lineal con L (línea roja).
]¡ (x)
.
2
2
~ --2nk*
L'l
(2n)3
I I
dk
de
?I I
L'l
h(x) ~ --2nk*(2n )3
dk
.
ikxcos(J sme
JZ2
de. ikxcosesm3e
e
.
----¡z2
e
(4.27)
(4.28)
Integrando entre k 111 ¡11 e infinito,
2
l
. (2nx)
n) 2n k*
l¡(x) ~ ( 2L'l
L +L 2 sm
L -2n2 x2 ( n-2SI. (2nx))]
L
(4.29)
n x 2nLxcos (2nx)
2 3 4 2
2
2
2
h(x)
k*: 3 12nLx( 2n2 x 2 - L 2 ) cos ( nx) + L 2 (L 2 + 2n2 x 2 ) sin( nx)- 4n4 x 4 (n- 2 Si ( nx))]
(2n )16n x
L
L
L j
(4.30)
~ ~2n
l
con
J si~t
X
Si(x)
=
dt
(4.31)
o
Para x
-7
O se obtiene
' J¡
3mkBTO x--->0
- - - : - - 1llTI
Tcorr
= -1 k*L = -
2n
To
(4.32)
recuperando el resultado de la Sección 3.3.2 para la contribución de las correlaciones a la temperatura del sistema.
Para la correlación transversal se encuentra
53
g,
g_,_
L
X
L
X
Figura 4.5: Funciones de cotTelación de velocidades transversal y longitudinal en tres dimensiones
cuando L « k*- 1.Importa observar los cambios de signo, por lo que la escala vertical es ilTelevante.
g_1_(x)
2
2
~ ~2n
k*: 3 [2nLx( 6n 2x 2 + L2) cos ( nx) + L2 (6n 2x 2 - L2) sin( nx)
(2n)
32n x
L
L
-12n4 x4 (n-2Si( ~x))J
2
(4.33)
Se observa que también existe formación de vó1iices en tres dimensiones para L « k*- 1, y su
tamaño característico se comporta linealmente con L (ver Figuras 4.5 y 4.6), teniéndose
xv ~ 0.48L
(4.34)
Sistemas grandes~ L » k*- 1
A partir de (4.19), las integrales l¡ eh quedan
]¡(X)~
211
1 Jk'
--27!'
dk
~~3
J
·¡, ,
dee/(XCOS<7
S1118 + /(' 2 JDO dk
{j
•
kmin
h(x)
~ ~27!'1
~~3
. ••
J .,
/,sine
dee/I(XCOSu_?_
~
(4.35)
k*
DO
fdkfdeeikxcose sin3 &+k*2 fdkfdeeikxcosesin3 e
k*
~
kmin
k*
Resolviendo lo anterior, se obtiene
54
(4.36)
xv
0.20
0.15
0.!0
/
0.15
0.20
0.30
0.50
L
Figura 4.6: Tamaño característico de los vó1iices (puntos azules) en 3D cuando L « k*- 1 y ajuste
lineal con L (línea roja).
Cu
g,_
L X
L
X
Figura 4. 7: Funciones de correlación de velocidades transversal y longitudinal en tres dimensiones
cuando L » k*- 1• Importa observar los cambios de signo, por lo que la escala vertical es irrelevante.
[ 1rk* -+
x k" cos (~~)
)]
l¡(x) ~ ( 2l'i
1r) 21rl-/(X+:;:1 [.
sm (k*)
x -2 s·(27rx)j
1 T
+ (2:;:+"k"·2 x )s·(¡'·
1 ,(·x J
2
2 3
1
h(x)~~27r 2 2 [2~k*x(2+k* 2 ~)cos(k*x)+27r2 (-2+k* 2 x2 )sin(k*x)
(27r)
47r k* x3
2
+k*
2
2
2
r-47rLxcos ( ~x) + 2L 2sin( ~x) + 7r2x2 ( -7rk* 2x 2 -
8Si
(4.37)
( 2~x) + 2 (4 + k* 2 x 2 ) Si (k* X])) jj
(4.38)
y, en el límite x ---+ O,
1
,
3mkBTo x--'>0
27r
k*L
------ hm 11 = 2 - -
Tcorr (
=- + 2--7r2 )
To
(4.39)
lo cual, como en el caso bidimensional, no reproduce de manera exacta el resultado de la Sección
55
xv
1511
11111
1511
300
200
51111
L
1
Figura 4.8:_Tamaño característico de los vórtices (puntos azules) en 30 cuando L » k*- y ajuste
lineal con L (línea roja).
3.3.2 para Tcon·; sin embargo, nuevamente se recupera la dependencia en k* L.
Finalmente,
g-L(x)
~
1. ? ~ 4rrLxk*2 cos (2rrx)
*? 2 sm
. (2rrx)
-b,-1 2rr
- 2k-L
(2rr)8rr2k*-x3
L
L
2
2
+rr2 [2k* x( -2 + 3k* x2 )cos(k* x) + 2(2 + 3k* x2)sin(k*x)
2 2
2 2
+k* x 1-3rrk* x
-
8Si( 2 ~x) + (8 + 6k* 2x2 )Si(k*x) 111
(4.40)
En las Figuras 4.7 y 4.8 se puede ver que, en este último caso, el si~ema también presenta
formación de vórtices, y el comportamiento de su tamaño en función de L es nuevamente lineal,
con
xv
~
0.37L
(4.41)
En resumen, se observa gráficamente que el comportamiento cualitativo de las correlaciones
espaciales de velocidad es esencialmente el mismo en dos y tres dimensiones, tanto para tamaños grandes como para tamaños pequeños del sistema. La correlación transversal de velocidades
presenta un cambio de signo, dando cuenta de la formación de vó1iices; mientras que el tamaño característico de estos vórtices, conespondiente a la posición del mínimo de g-L, se compmia
linealmente con el tamaño del sistema en todos los casos estudiados.
56
Capítulo 5
Difusión de una partíc~la en el campo de
velocidades generado por las bacterias
Resumen
En este capítulo, se estudia numéricamente la difusión inducida por las
bacterias sobre una partícula pasiva sumergida en el fluido. Se considera el
caso de una partícula puntual, cuya velocidad está dada en cada instante por
la velocidad del fluido en la posición en que ésta se encuentra, y que viene
dada en función de los campos de densidad y tensor dipolar de las bacterias.
Resolviendo el sistema de ecuaciones encontrado en el Capítulo 2 para los
campos, se obtiene la velocidad u del fluido en la posición R de la partícula.
Así, se calcula el desplazamiento cuadrático medio de ésta, y se obtiene el
coeficiente de difusión como la pendiente de la curva (M2 (t)) versus t.
Se encuentra que la difusión crece cuadráticamente con el tamaño del sistema
en las regiones del espacio de parámetros donde existe una separación de
escala entre los valores propios del modelo, siendo uno de ellos mucho más
pequeño que el resto; en cambio, cuando existen contribuciones de varios
valores propios, este crecimiento se vuelve cúbico.
Por otra parte, la dependencia de la difusión con la cercanía del sistema a la
densidad crítica no es clara cuando los valores propios se encuentra acoplados.
Se espera, sin embargo, que ésta disminuya al aumentar la concentración de
bacterias en el rango de parámetros donde existe una separación de escala entre
los valores propios.
5.1.
Introducción
Estudiamos ahora el efecto de las fluctuaciones sobre la difusión de una partícula pasiva arrastrada por el campo de velocidades inducido por las bacterias en el fluido. En particular, nos interesa
determinar cómo esta difusión se ve afectada por el tamaño L del sistema y por la cercanía de éste
57
a la transición nemática.
El coeficiente de difusión de una partícula puede definirse, según la fórmula de Einstein [29],
como
jj = ~~~ 2~t (M2(t))
(5.1)
(M
2 (t)) es el desplazamiento cuadrático medio de ésta, t el tiempo y d la dimensión del
donde
espacio. Si la partícula posee una velocidad v(t), se puede escribir
J
t
~R(t) =
dt' v(t')
(5.2)
o
de donde se obtiene la fórmula de Green-Kubo [29],
I
00
D-
= 21d
dt(v(O) ·v(t))
(5.3)
o
Para el caso de una partícula pasiva en el campo de velocidades del fluido, podemos considerar
que ésta es puntual y que su velocidad en cada instante estará dada por el campo de velocidades del
fluido en la posición R donde ésta se encuentra, i. e.,
R(t) =u (R(t))
(5.4)
Luego, el cálculo analítico de esta difusión presenta grandes dificultades, pues involucra correlaciones espacio-temporales de velocidad de la forma
UiJ(t/s)
= (u¡(x,t)uj(x,t/s))
(5.5)
donde u(x, t/s) representa la velocidad en el instantes del elemento de fluido que pasa por la posición x en el instante t [25]. Estas correlaciones se denominan Lagrangianas. Luego, las correlaciones de velocidad calculadas en el Capítulo 4 (correlaciones Eulerianas) a partir de los factores de
estructura estáticos obtenidos en el Capítulo 2 no nos son útiles en este caso. Tampoco son útiles
los factores de estructura dinámicos,
Ga,B(k, t) = ('Pa(k, O)'P,B( -k, t))
58
(5.6)
que, si bien representan la evolución temporal de los campos, no incluyen el seguimiento del elemento de fluido que se necesita en (5.5). Sin embargo, resultan útiles para obtener órdenes de
magnitud.
Analíticamente, este problema ha sido resuelto de forma aproximada para sistemas turbulentos,
los cuales han sido extensamente estudiados y son bien conocidos. Así, se han encontrado aproximaciones para las correlaciones Lagrangianas para formas analíticas simples de las correlaciones
Eulerianas o aproximaciones de éstas derivadas a partir de argumentos de simetría o escala [30].
Otra forma en que podrían encontrarse la correlaciones Lagrangianas a partir de las Eulerianas
corresponde a medir estas últimas experimentalmente, junto con el desplazamiento cuadrático medio [30].
En el caso del sistema que estamos considerando, no se cuenta con argumentos suficientes para
definir a priori una aproximación. Por lo tanto, la difusión de la partícula pasiva se estudiará de
forma numérica.
5.2.
Algoritmo
El campo de velocidades del fluido depende de los campos de densidad y tensor dipolar de las
bacterias de la fonna,
u¡(r) = O"o
J
dr' Fijk(r- r')p(r')®jk(r')
(5.7)
V
lo cual se obtiene a partir de las ecuaciones (3 .16) y (3 .22), recordando que Fijk corresponde a la
parte simétrica en jk de '8ij,k· Así, para obtener u, integramos numéricamente el modelo presentado
en el Capítulo 2 para la evolución de los campos en dos dimensiones
8'1'
-=-L·'I'+1J
8t
'1' = (tp,ix,iy,Go,é¡)
1
1] = -27r (o,~f,~f,~~,~n
1'\
.....
"
(5.8)
(5.9)
"
(5.10)
Para esto, utilizamos una grilla discreta k= (kx, ky) tal que kx, ky E [ -2rr, 2rr] y 11kx =11ky = 11k =
2rr / L, con L el tamaño del sistema, e integramos explícitamente. En cada punto se tendrá, para la
parte derterminista, una integral tipo Euler
'P~+l)(k)
= (óaj3-MLaj3(k))'P~n)(k)
59
(5.11)
Debemos agregar los términos fluctuantes a la expresión anterior. Vimos en 2.4 que los r¡a son
independientes entre sí. Escribiendo r¡cy(k) = aa(k) + iba(k) tenemos, por ejemplo,
az(k, t) =- 41n
bz(k,t) =-
Luego, como (,;~J(r 1 ,t)g~J(rz,t'))
f
4~i Jdrg{(r,t)(e-ik·r -eik·r)
= nfo(r¡
~ (a2 (k, t)az(q, t')) = ~7r ~o(t _ t')
1
drg{ (r, t) (e-ik·r + eik·r)
(5.12)
(5.13)
-rz)o(t-t'),
J
dr (e-i(k+q)·r + e-i(k-q)·r + ei(k-q)·r + ei(k+q)-r)
= ~ o(t- t') (Ok,q + ok,-q)
(5.14)
~ (bz(k,t)bz(q,t')) = ;no(t-t')(ok,q -ok,-q)
(5.15)
~ (az(k, t)bz(q, t')) =O
(5.16)
Es decir, las partes real e imaginaria de cada componente del ruido están descorrelacionadas.
Además, las correlaciones entre k y -k aparecen por el hecho que r¡a( -k) = r¡~(k) = aa(k)- iba/k).
El caso de los demás r¡a es análogo; luego, debemos resolver la ecuación
tp~~+ 1 \k) = (oa,e-L1tLa,e(k))tp~)(k)- ~Xa(k)
(5.17)
donde XI (k) = O y las partes real e imaginaria de X2 ... 5 (k) son números aleatorios no correlados
entre sí con una distribución de probabilidad gaussiana de promedio nulo y desviación cuadrática
unitaria (distribución N(O, 1)). Además, se cumple tpa( -k) = tp~(k) y x a( -k) =x7/k).
Resolvemos (5.17) con los parámetros vo = 0.2, Do= 0.03, D¡ = 0.01 y r = 1.0; además de condiciones iniciales nulas tanto para los campos como para la posición de la partícula y M = 5 x 1o-2 .
Por otra parte, para asegurar que los campos evolucionan por un período lo suficientemente
largo, escogemos un tiempo total T de simulación tal que
T;::: 100:-l- 1
(5.18)
donde A es el valor propio más pequeño de L en k = L1k, el cual dará origen a la evolución más
lenta. La Figura 5.1 muestra los campos en función del tiempo para k = L1k y un L dado, y se puede
ver que T es mucho mayor que el tiempo característico de las fluctuaciones.
60
2.5 ¡ - : - - - , - - - - - - - - , - - - - - - - , - - - - , - - - 'PJ-------a)
'!'2
2
1.5
1\
1
1
1
1
1
.
1
'!'3
'P4
o·~ ~r /i/' j, ,¡,! ~ tt .~. Jil.uj,,i¡~: J.,l:t~ }~,J»~:~~ ~'l\)
11
'
1
Ir
/!1
1
r·~·'~Pf\/'vi){J';~:¡¡wll\~~;t~ r~,r~Ji:)F , ~l,jfl"¡i':\/ r,
1.¡,
.¡\
-0:~ ~
-1. 5 Hl
-2
-2.5
¡¡):,\
1
/'f
1
,11
1
1
n
1
1
L
'----L-----'-----'------'-----'------'
o
250
500
750
1000
1250
1500
t
2
~-~-~-~-~---~--~-~-~
b)
1.5
1
0.5
o
\i:·\.
\\•·,
i
/.-
.... 1\r
¡·~.
\)
..
-0.5
-1 ~-~-~-~-~--~----'----~-~
500
510
520
530
540
550
560
570
580
t
Figura 5.1: Campos 'Pa(k) en función del tiempo para k= f..k para a) el intervalo completo de
simulación y b) una pequeña porción.
61
Así, calculamos la velocidad del fluido para cada par (kx,ky). Utilizando (5.7) en espacio de
Fourier, a orden lineal,
u(k)
= CJoP * frijk(k)e jk(k)
(5.19)
A partir del modelo para los campos y la expresión para Fijk de la ecuación (3.20) se obtiene
ílx(k)
CJ0 p* iky [20o(k)kxky- 0¡ (k) (''S:2
= -r¡lS )]
(5.20)
uy(k)
CJop" ikx [20o(k)kxky- 0¡ (k) ('?
,2)]
= --r¡JS:- 'S
(5.21)
A
0
0
Luego,
u(R(n)) = ~ ¿ u(k)eik·R(n)
(5.22)
k
Se debe notar que no se requiere conocer el campo de velocidades del fluido en cada punto del
espacio, sino solamente en la posición donde se encuentra la partícula pasiva, por lo que el cáculo
se simplifica bastante. Además, la forma en que se define la expresión anterior y la discretización
(kx,ky) = 11k(n,m), con !1k = 2n/L y n, m enteros, aseguran la existencia de condiciones de borde
periódicas en el sistema. En efecto,
u(x+ L,y+ L)
= ~ ¿ u(2nn/L,2nm/L)ei(2l"(x+L)+ 21m(y+L))
n,m
1 ~ (2
2Tfm )ei2n(n+m)
=V L.,¡
u nn/L,2nm/L)e1·(2""
yx+yy
A
n,m
V¿ u(2nn/L,2nm/L)ei(21''x+21"'Y)
=1
n,m
= u(x,y)
(5.23)
El movimiento de la partícula en función del tiempo estará dado, entonces, por
R(n+l)
= R(n) +11tu(R(n))
(5.24)
Una trayectoria típica r(t) puede verse en la Figura 5.2. Con esto, definimos
M 2(to, t)
= [x(to + t)- x(to)] 2 + [y(to + t)- y(to)] 2
62
(5.25)
50
40
30
20
-
~
'-'
.-,
"'
10
o
-1 o
-20
-30
-40
-50
-50
-40
-30
-20
-10
o
10
20
30
40
50
x(t)
Figura 5.2: Trayectoria típica de la partícula en el campo de velocidades del fluido, en el intervalo
[0, T].
y, finalmente, promediando sobre distintos t0 y realizaciones del ruido obtenemos ( l:!..R 2 (t) ). Un resultado típico para esta cantidad se muestra en la Figura 5.3. Se observa que para tiempos largos el
desplazamiento es esencialmente difusivo, escalando linealmente con el tiempo. Para tiempos muy
cortos, en cambio, el desplazamiento escala como t2 , lo cual corresponde al régimen balístico de la
partícula.
A pmiir de ( tlR 2 (t)) extraemos, finalmente, el coeficiente de difusión inducida D;n como la
pendiente de la curva.
5.3.
Resultados
5.3.1.
Coeficiente de difusión en función del tamaño del sistema
Utilizando un valor fijo A = 0.1, couespondiente a un sistema con un 90% de la densidad crítica
Pe, calculamos D;n para distintos valores de L. La Figura 5.4 muestra un escalamiento cuadrático
entre el coeficiente de difusión inducida y el tamaño del sistema.
El crecimiento de D;n en función de L es esperable pues, a medida que aumenta el tamaño del
sistema, aumentan también los tiempos de con-elación de las fluctuaciones, los cuales escalan como
63
Figura 5.3: Desplazamiento cuadrático medio de la pmiícula, promediado sobre 20 to distintos y 5
realizaciones del ruido, para a) todo el intervalo [0, T /20] y b) tiempos muy cortos.
64
3.5
1
·-L
3
1
2.5
.~
Q
01)
.T
1-
2 f1.5
o
..........
1
T
1
0.5
o
2logL+a
--t-0.5
2.2
2.4
2.6
3
2.8
3.2
3.4
3.6
3.8
4
logL
Figura 5.4: Coeficiente de difusión inducida en función del tamaño del sistema entre L = 10 y
L =50 (cruces rojas); y ajuste con escalamiento cuadrático (línea verde) para A= 0.1, Do= 0.03,
D 1 = 0.01. Se omiten las banas de enor, que son más pequeñas que los símbolos.
el inverso de los valores propios del operador de evolución. Como vimos en el Capítulo 2, estos
valores propios tienen la fonna aproximada
A'
~[Do+~ \k' +O(k')
(5.26)
2
(2B- 3A)v
,t2 =A+ Do- 4A(B- A)o
r
3
,t =A+ [no+
,t4,s=B+[D0
1J? + O(k3)
(5.27)
v6
]1?-
+0(~)
(5.28)
v6
l!?-+O(k3)
(5.29)
4(B-A)
4(B-A)
y los A I ... 3 se hacen pequeños para k~ O cerca de la transición nemática. El efecto neto, entonces,
al aumentar L es la aparición de contribuciones de modos con k cada vez más pequeño, lo que
conesponde a tiempos de con-elación cada vez más grandes.
Por otra pmie, el exponente cuadrático puede explicarse suponiendo que la contribución dominante a la difusión viene dada por el valor propio más pequeño en la escala más grande posible,
A1(2n / L ). El tiempo de correlación asociado escala precisamente como L 2 . Sin embargo, esto se
debe a que existe una separación de escala entre A1 y los demás valores propios en la región escogida del espacio de parámetros, haciéndose el primero aproximadamente un tercio del siguiente
65
3
+2
'"'-'
e$ o 1
o
bJ)
1
T
........
-1
1
-2¡
3logL +a
+
-3
2.2
2.4
2.6
2.8
3
3.2
3.4
3.6
3.8
4
logL
Figura 5.5: Coeficiente de difusión inducida en función del tamafio del sistema entre L = 1Oy L = 50
(cruces rojas); y ajuste con escalamiento cúbico (línea verde) para A= 0.3, Do= 10, D¡ = 0.1. Se
omiten las banas de enor, que son más pequefias que los símbolos.
cuando L
= 20, y un orden de magnitud menor cuando L = 30.
Cuando no se cumple esta separación de escala, el acoplamiento entre los distintos modos da
origen a un comportamiento no trivial de D¡n con L. En la Figura 5.5 se observa un escalamiento
cúbico para una región del espacio de parámetros donde ,1 1 se hace aproximadamente un tercio del
siguiente valor propio recién en L = 50. Por ahora, no tenemos una explicación para el exponente
encontrado en este caso.
5.3.2.
Coeficiente de difusión en función de la cercanía a la densidad crítica
Ahora estudiamos la dependencia de D¡11 en A, considerando L = 10 fijo. Se escogió este valor
particular de L pues el costo computacional del cálculo escala como L 4 , donde una contribución
de orden L 2 viene del número de puntos de la discretización, mientras que la otra conesponde al
tiempo de simulación T definido en (5 .18), pues Aescala como f..k- 2 .
En la Figura 5.6 se muestran los resultados obtenidos. No se observa una dependencia clara en
este caso, lo cual se debe a que el valor del k más pequeño posible ya es lo suficientemente grande
para que la parte difusiva sea la dominante en los valores propios, por lo que la dependencia con A
del ténnino de orden cero en ,1 23 no influye apreciablemente; y también lo suficientemente grande
para que esta parte difusiva no presente una fuerte dependencia en A, estando fuera del régimen
donde las ecuaciones (5.26) y (5.27) son válidas (ver Figura 2.4).
66
0.05
1
T
o
-0.05
1
1
1
T
;::
~
-0.1
o
........
-+·
-0.15
-0.2
1+
-0.25
-14
-13
-12
-11
-10
-9
-8
-7
-6
-5
-4
logA
Figura 5.6: Coeficiente de difusión inducida en función de A. Se omiten las barras de error, que son
más pequeñas que los símbolos.
Así, para detenninar la dependencia de D¡17 con A es necesario explorar, entonces, tamaños del
sistema muchísimo más grandes. En este régimen, se espera que el tiempo de correlación de las
fluctuaciones dependa esencialmente de A1, debido a la separación de escala entre los valores propios. De la ecuación (5.26), se ve que este valor propio se hace más grande para un L dado a medida
que el sistema se acerca a la densidad crítica, por lo que el coeficiente de difusión inducida debería
presentar un comportamiento creciente con A.
67
Capítulo 6
Conclusiones
En esta tesis, se presentó un modelo hidrodinámico simple para estudiar los efectos de las fluctuaciones en un baño bacteriano en aproximación diluida, correspondiente a una extensión de la
teoría cinética presentada en [24]. Este modelo fue aplicado para los casos particulares de la temperatura del fluido y la difusión inducida de una partícula pasiva sumergida en él.
En el Capítulo 2 se extendió la teoría cinética de [24], de manera de incluir los efectos de las
fluctuaciones, así como también obtener una ecuación hidrodinámica para la evolución del tensor dipolar de fuerza, además de aquellas para la densidad y orientación locales de las bacterias.
A partir de esta hidrodinámica, se obtuvo un modelo lineal para las fluctuaciones de los campos
con respecto a sus valores de equilibrio en fase isotrópica, cerca de la transición nemática. Luego,
se calcularon los modos propios del sistema en la aproximación de grandes longitudes de onda,
además de las intensidades de las correlaciones entre los campos tanto en forma exacta como aproximada para grandes longitudes de onda y densidades cercanas a la crítica.
En el Capítulo 3 se obtuvo, por medio del cálculo de la energía cinética del fluido, la contribución de las bacterias a la temperatura de éste, la cual se divide en dos partes: una de ellas corresponde a la agitación producida en el fluido por la sola presencia de las bacterias en él, mientras que
la otra está dada por la correlación entre los campos de velocidades inducidos por las bacterias. La
primera de estas contribuciones es independiente del modelo colectivo utilizado y diverge logarítmicamente con el tamaño del sistema en dos dimensiones, mientras que para el caso tridimensional
no presenta divergencia y sólo depende de las escalas microscópicas. Para la contribución de las
correlaciones se derivó, primero, una expresión general, encontrándose que al orden dominante ésta depende solamente de las correlaciones entre las componentes del tensor dipolar de fuerza de
las bacterias. Luego, se aplicó el modelo del Capítulo 2, y se obtuvo que la contribución de las
correlaciones a la temperatura crece rápidamente como el cuadrado del tamaño del sistema para
tamaños pequeños, mientras que para tamaños grandes presenta divergencia logarítmica. Además,
escala linealmente con la intensidad de las fluctuaciones del sistema y no presenta comportamiento
crítico al acercarse éste a la transición nemática.
En el Capítulo 4 se abordó el caso más general del tensor de correlaciones espaciales del campo
de velocidades inducido por las bacterias en el fluido, encontrándose una expresión para éste que,
nuevamente, es independiente del modelo utilizado. Luego, se evaluó este resultado aplicando el
modelo descrito en el Capítulo 2, encontrando que éste predice la existencia de escalas en el fluido
68
que se encuentran anticorrelacionadas en velocidad, dando cuenta de la formación de vórtices en
el sistema. Este comportamiento es, cualitativamente, esencialmente el mismo para sistemas tanto
bidimensionales como tridimensionales, sin importar el tamaño de éstos.
Finalmente se estudió de forma numérica, en el Capítulo 5, la difusión de una partícula pasiva
puntual inmersa en el fluido, siendo arrastrada por el campo de velocidades inducido en él por las
bacterias. Se encontró, para las regiones del espacio de parámetros (A,L) que fueron exploradas,
que el coeficiente de difusión inducida escala con el cuadrado del tamaño del sistema cuando éste es lo suficientemente grande para que domine sólo el más pequeño de los valores propios del
modelo; mientras que el escalamiento se hace cúbico para tamaños pequeños del sistema, cuando
los modos se acoplan entre sí. Por otra parte, el coeficiente de difusión inducida no presenta una
dependencia clara en función de la cercanía del sistema a la densidad crítica que origina la inestabilidad nemática, debido a que el tamaño escogido para éste es demasiado pequeño, y se espera un
crecimiento de D¡n en función de A para tamaños lo suficientemente grandes.
6.1.
Trabajo futuro
6.1.1.
Difusión inducida
Se debe recorrer de manera más acabada el espacio de parámetros (A,L) y determinar el comportamiento del coeficiente de difusión inducida en las diferentes regiones de éste. A partir de esto
se pueden verificar, en particular, los efectos de la separación de escala entre los modos propios
del sistema para valores lo suficientemente grandes de L respecto a A; por ejemplo, ver si ésta da
origen a una disminución del coeficiente de difusión inducida éste a medida que el sistema se acerca a la transición nemática. Además de esto, es posible buscar una forma simple de comprender,
teóricamente, los escalamientos encontrados para el coeficiente de difusión inducida en los distintos casos, en especial la dependencia cúbica en L que se observa cuando los valores propios del
sistema no se encuentran lo suficientemente separados.
6.1.2.
Fuerzas tipo Casimir
Cuando las fluctuaciones hidrodinámicas son de largo alcance, y se sumergen objetos en el fluido, éstos limitan las posibles fluctuaciones. Esta limitación de las flucutaciones puede dar lugar a
una modificación de la presión. Así, se genera una fuerza neta sobre los objetos, análogamente a lo
que ocurre con las fuerzas de Casimir. Estas fuerzas han sido deducidas para los casos de fluidos
críticos [31] y cristales líquidos [32], ambos sistemas en equilibrio. También se han calculado en
sistemas fuera del equilibrio utilizando el método de acoplamiento de modos [33].
El tensor de presiones generado por las bacterias en un fluido puede escribirse en función de
los campos densidad y tensor dipolar de fuerza, cuyas correlaciones fueron calculadas en el Capítulo 2. Por lo tanto, el modelo descrito en esta tesis puede aplicarse para calcular la influencia de
69
las fluctuaciones en el tensor de presiones del fluido por medio del acoplamiento de modos y, con
esto, determinar la aparición de fuerzas tipo Casimir entre obtejos sumergidos en él. Actualmente
ya se cuenta con una expresión final a evaluar, y sólo falta definir correctamente las condiciones
de borde impuestas por los objetos en el fluido para luego realizar el cálculo de la fuerza sobre ellos.
70
Bibliografía
[1] S. Suarez, y A. Pacey, Sperm transport in the female reproductive tract, Human Reprod.
Update 12, 23 (2006).
[2] G. L. Cooper, A. L. Schiller, y C. C. Hopkins, Possible role ofcapillary action in pathogenesis
of experimental catheter-associated dermal tunnel infections, J. Clin. Microbiol. 26, 8 (1988).
G. Harkes, J. Dankert y J. Feijen, Bacteria! migration along salid surfaces, Appl. Enviran.
Microbiol. 58, 1500 (1992).
[3] M. Kim, y K. Breuer, Enhanced diffusion dueto motile bacteria, Phys. Fluids 16 (2004).
[4] Andrey Sokolov, Mario M. Apodaca, Bartosz A. Grzybowski, e Igor S. Aranson, Swimming
bacteria power microscopic gears, Proc. Natl. Acad. Sci. U. S.A. 107, 969 (2009).
[5] H.C. Berg, E. coli in Motion, (Springer, 2003).
[6] J. Happel, y H. Brenner, Low Reynolds Number Hydrodynamics: with special applications to
particulate media, (Springer, 2009).
S. Kim and S .J. Karilla, Microhydrodynamics: Principies and Selected Applications, (Dover,
2005).
[7] J. Dunstan, Modelo hidrodinámico de bacterias interactuando con superficies y partículas
micromeétricas, Tesis de Magister, Universidad de Chile, 2010.
[8] Donald L. Koch, y Ganesh Subramanian, Collective Hydrodynamics of Swimming Microorganisms: Living Fluids, Annu. Rev. Fluid Mech. 43, 637 (2011).
[9] E. M. Purcell, Life at low Reynolds number, Am. J. Phys. 45, 3 (1977).
[10] K. E. Machin, Wave propagation alongjfagella, J. Exp. Biol. 35, 796 (1958).
[11] A. Ishihara, J. E. Segall, S. M. Block, y H. C. Berg, Coordination ofjfagella onfilamentous
cells ojEscherichia coli, J. Bacteriol. 155, 228 (1983).
H. C. Berg, Random Walks in Biology (Princeton University Press, Princeton, NJ, 1993).
[12] David Saintillan, Extensional rheology ofactive suspensions, Phys. Rev. E 81, 056307 (20 10).
David Saintillan, The Dilute Rheology of Swimming Suspensions: A Simple Kinetic Model
Experimental Mechanics 50, 1275 (2010).
[13] David Saintillan, y Michael J. Shelley, Instabilities and Pattern Formation in Active Particle Suspensions: Kinetic Theory and Continuum Simulations, Phys. Rev. Lett. 100, 178103
(2008).
71
David Saintillan, y Michael J. Shelley, Jnstabilities, patternformation, and mixing in active
suspensions, Phys. Fluids 20, 123304 (2008).
[14] Andrey Sokolov, Igor S. Aranson, John O. Kessler, y Raymond E. Goldstein, Concentration
Dependence ofthe Collective Dynamics ofSwimming Bacteria, Phys. Rev. Lett. 98, 158102
(2007).
[ 15] l. Llopis, e l. Pagonabarraga, Hydrodynamic interactions in squirmer motion: Swimming with
a neighbour and close toa wall, J. ofNon-Newtonian Fluid Mech., 165, 946 (2010).
[16] l. Pagonabarraga, e l. Llopis, Cooperative Ejj"ects in Biological Suspensions: From Filaments
to Propellers, Lecture Notes in Physics 752, pp 133-152 (2008).
[17] J. Toner, y Y. Tu, Flocks, herds, and schools: A quantitative theory offlocking, Phys. Rev. E
58, 4828 (1998).
[18] D. Forster, Hydrodynamic Fluctuations, Broken Symmetry, and Correlation Functions, (HarperCollins Canada, 1994).
[19] S. Ramaswamy, R.A. Simha, y J. Toner, Active nematics on a substrate: Giant number fluctuations and long-time tails, Europhys. Lett. 62, 196 (2003).
V. Narayan, S. Ramaswamy, y N. Menon, Long-Lived Giant Number Fluctuations in a Swarming Granular Nematic, Science 317, 105 (2007).
[20] T. P. C. van Noije et al., Randomly driven granular fluids: Large-scale structure, Phys. Rev.
E 59, 4326 (1999).
[21] X.-L. Wu, y A. Libchaber, Particle Diffusion in a Quasi-Two-Dimensional Bacteria/ Bath,
Phys. Rev. Lett. 84, 3017 (2000).
[22] G. Miño, T. E. Mallouk, T. Darnige, M. Hoyos, J. Dauchet, J. Dunstan, R. Soto, Y. Wang, A.
Rousselet, y E. Clement, Enhanced diffusion dueto active swimmers ata sol id surface, Phys.
Rev. Lett.106, 048102 (2011).
[23] L.D. Landau, y E.M. Lifshitz, Fluid Mechanics, Pergamon Press, Oxford (1984).
[24] Igor S. Aranson, y Lev S. Tsimring, Patternformation ofmicrotubules and motors: lnelastic
interaction ofpolar rods, Phys. Rev. E 71, 050901R (2005).
Igor S. Aranson, y Lev S. Tsimring, Theory of self-assembly of microtubules and motors,
Phys. Rev. E 74, 031915 (2006).
[25] Robert H. Kraichnan, Dispersion ofparticle pairs in homogeneous turbulence, Phys. Fluids
9, 1937 (1966).
[26] A. Donev, J. B. Bell, A. de la Fuente, y A. L. Garcia, Dif.fusive Transport Enhanced by Thermal Velocity Fluctuations, Phys. Rev. Lett. 106, 204501 (2011).
[27] Joel H. Ferziger, y H. G. Kaper, Mathematical theory oftransport processes in gases, (NorthHolland, 1972).
R.L. Liboft: Kinetic Theory, (Springer; 3rd edition, 2003).
72
[28] Igor S. Aranson, Andrey Sokolov, John O. Kessler, y Raymond E. Goldstein, Model for dynamical coherence in thinfilms ofself-propelledmicroorganisms, Phys. Rev. E 75, 040901R
(2007).
[29] R. Kubo, M. Toda, y N. Hashitsume, Statistical Physics JI: Nonequilibrium Statistical Mechanics, (Springer; 2nd edition, 2003).
[30] P. G. Saffman, An approximate calculation of the Lagrangian auto-correlation coefficient for
stationary homogeneous turbulence, Appl. Sci. Res. A 11, 245 (1962).
T. S. Lundgren, Turbulent pair dispersion and sea lar diffusion, J. Fluid Mech. 111, 27 (1981 ).
[31] M. Krech, The Casimir Effect in Critica! Systems (World Scientific, Singapore, 1994).
[32] A. Ajdari, L. Peliti, y J. Prost, Fluctuation-induced long-rangeforces in liquid crystals, Phys.
Rev. Lett. 66, 1481 (1991).
A. Ajdari, B. Duplantier, D. Hone, L. Peliti, y J. Prost, "Pseudo-Casimir" effect in liquid
crystals J. Phys. II 2, 487 (1992).
[33] C. Cattuto, R. Brito, U. Marini Bettolo Marconi, F. Nori, y R. Soto Fluctuation-Induced Casimir Forces in Granular Fluids, Phys. Rev. Lett. 96, 178001 (2006).
P. Rodriguez-Lopez, R. Brito, y R. Soto, Dynamical approach to the Casimir effect Phys. Rev.
E 83,031102 (2011).
73
Apéndice A
Expansión en modos de Fourier angulares
A partir de la ec. (2.12)
7[
8tf = Dra;¡ +8¡D¡¡8¡j- V· (fvon) + g J dw [!(r,cp+ ;)f(r,cp- ~)- f(r,cp)f(r,cp-w) J+8~(fg)
-7[
(A.l)
multiplicando por e-imifJ e integrando en cp, se obtiene
81
(f dcpfe-im~) = -m Dr (f dcpfe-imifJ) f dcp [Do
2
- vo V·
+
(f
V2 + D¡ (axx -aY.Y )cos(2cp) + 2D¡8x8ysin(2cp) ]fe-im~
dcp fne-imifJ) + J dcpe-imifJ 8cp(fg)
7[
+g Jdcp Jdw
[f(cp+~)f(cp- ;)-f(cp)f(cp-w)]e-imifJ
(A.2)
-7[
donde Do= (D11 +DJJ/2 y D¡ = (D¡¡-DJ..)/2. Expandiendo jy gen sus modos de Fourier angulares,
utilizando (2.20) y (2.21), podemos reescribir (A.2) como
8tfm
= -m2 Drfm +Do V2 fm + ~¡
+ iD¡8x8y
(axx -8yy) J
dcpf(e-i(m+l)~ +e-i(m-!)~)
I
dcp f(e-i(m+!)~- e-i(m-1)~)- ~ [ax (J dcp f(e-i(m+!)ifJ + e-i(m-l)ifl))
+iay (J dcp f(e-i(m+l)ifJ -e-i(m-l)ifl))] +
+ (2!)2
f d4>
Ídw
-7[
~:
f
dcpg(Jo + f¡ei~ + .. .)e-im~
[If¡eil(~+!!f) ¿jjeif(~-!!j)- ¿f¡eil~ LiJeif(~-w)]e-imifJ
1
J
74
1
J
(A.3)
Notemos que
IT
IT
_L fdcpe-imc/Jfdw ~ f¡eil(c/J+!!f) ~ J:·eiJ(c/J-!!f)
9~
~
1
-rr
~
1
1
= _L fdif;e-imifJfdw ~ f¡J:·ei(l+j)c/Jei(!-j)!fj
1
9~
= ;;rr J
-rr
~
l,1
dcpe-imifJ If¡JJei(l+j)c/Js l(l-j) ~J
l,j
= g IJJJm-jS (;rr;- j;rr)
(A.4)
j
con
S(x)= smx
(A.5)
X
Análogamente
Jdw ~
IT
_L Jdcpe-imifJ
(2;rr)2
~
1
-rr
IT
f¡eilc/J
~ J:·eij(cfJ-w) = _L fdcpe-imc/Jfdw ~ f¡J:·ei(l+j)c/Je-ijw
~
.~
(2;rr)2
1
1
-rr
11
!,1
= ~ fdcpe-imc/J l._.fifoeilc/J
2;rr
1.
·1
=~k
~0
Por otra parte,
f difJ§(fo + f¡eic/J + · .. )e-imc/J
~1o5m
(A.7)
Reemplazando en (A.3)
· + ( Drm2 + gfo ) fm
fm
~
(nk
= g ~fk-jf)S
2- ]7r. )+Do V2fm + D¡
2
(Oxx -Oyy ) (fm+2 + fm-2)
1
· .
+ zD¡oxoy(fm+2- fm-2)-
.
] im
2vo [Ox(fm+I + fm-I) + zoy(fm+lfm-l) + ;rrfo5m
2
(A. S)
75
Apéndice B
Expresiones analíticas exactas para los
polinomios rpn y Qn
Las siguientes expresiones corresponden a los polinomios rpn y Qn, que aparecen en las ecuaciones (2.1 07) a la (2.115), y a partir de los cuales se obtiene la solución exacta para las funciones
escalares que constituyen los factores de estructura estáticos Gaf3·
P 1(k)
= p* 2 r[8B 2 (A +B)v6 +4 (8A 2 (A +B)Df + (B2 (10Do -D¡) + 8A 2 D¡ + 6AB(Do +D¡) ]v6
+(2A + 3B)vÓ]~ + 2 [8ADf(lOADo +6BDo +3AD¡ +2BD¡) + [8(A +4B)D6
+6(10A +B)DoD¡ + 15(A +B)Df]v6 + 15DovÓ]k4 + [sDf [B(2Do + D¡)(4Do + D¡)
+A (32D6 +20DoD¡ +Di)]+ (32D~ + 80ffoD¡ + 86DoDf -9DÜv6]k6
-4Dj(2Do + D¡) ( -16D6- 8DoD¡ + Di)k8 ]
P 2 (k)
= -p*vork [8B2 (A + B)Do + 2 [4B(3A + 5B)D6 + 8A(A + 2B)D0D 1 -
(B.1)
2(A + B)(4A + B)Dj
+ [4A(Do -D¡) +B(6Do +D¡)Jifo]~ + [8B(2Do -D¡)(2Do +D¡)2 + 8A (2D~ + IOD6D 1
4
-7DoDf -3Di)+ (30D6 -9DoD¡ -14Di)v6]k +4(8DÓ + 16D~D¡ -6D6Df -9DoD~
6
(B.2)
-2Di)k ]
P4(k)
= -p*r~ [32A 2 (A + B)DoD¡ +4 [B 2 (-Do +D¡) +4A 2 (Do + D¡) +AB(-2Do + 5D¡) ]v6
+2(4A -B)vÓ + [ 16ADoD¡(lOADo +6BD0 +3AD¡ +2BD¡) +2 [lü(2A -B)D6
+(43A +23B)DoD¡ +4(3A +B)Di]v6 + (9Do + 14D¡)vÓ]l?
+ [8DoD¡ [B(2Do +D¡)(4Do +D¡)+A (32D6 +20DoD¡ +Di)]
+(16D~ + 110D6D¡ +27DoDf + 8DDv6]k4 +4DoD¡(2Do +D¡)(16D6 + 8D 0D 1 -Di)k6 ]
(B.3)
76
Ps(k)
P 6 (k)
= r[4B(A +B) + [4(A + 3B)Do -2BD¡ + 5v6]J? + 2Do(4Do -D¡)k4 ]
(B.4)
= -['/? [32B\A +B)2 [2AD 0D¡ +(Do +D¡)v6] +4B [8B(A +B)D¡ [4(2A 2 + 5AB + B 2 )D6
+B(A +B)DoD¡ -A(A +B)D7] +4[8B(A +B)(A +2B)D6 + (8A 3 +37A 2 B+39AB2 + 15B3 )D0D 1
-(A +B) 2 (4A +3B)Di]v6 +2 [(8A 2 + 9AB+ 6B 2 )Do +B(14A +9B)D 1]v6 + (4A -B)v~]J?
+2 [8BD¡ [4(5A 3 + 34A 2 B+49AB2 + 16B 3 )D~ + 8B(A +B)(A +2B)D6D 1
-(6A 3 +24A 2 B +25AB2 + 6B3 )DoDi -B(A +Bi DfJ +4 [4B(5A 2 + 26AB +25B2 )D~
+4 (4A 3 + 55A 2 B + 89AB 2 + 33B3 )D6D 1 - ( 12A 3 + 98A 2 B + 138AB2 + 49B 3 )D0 Df
+B(-8A 2 + 5AB + 7B 2 )Dnv6 +2
[s (2A
2
+ 11AB + 8B 2 )D6 +B(l01A + 94B)DoD¡
-4(2A 2 + 9AB + 8B2 )Di)v6 + (l2AD 0 + l3BD 0 - 8AD 1 +23BD 1 )v~]k4 + [8D 1 [ 16 (A 3
+17A 2 B+45AB 2 + 25B3 )D6 +4B(5A 2 +26AB +25B2 )D~D 1 -4(2A 3 +22A 2B +44AB2
+21B 3 )D6Df -B(6A 2 + 20AB + l3B 2 )DoDf + B 2 (3A +2B)Di] +4 [ 16(A 2 + 12AB
+19B 2 )D6 +4(75A 2 +325AB + 187B2 )D~D¡ -4(46A 2 + 159AB +87B2 )D6Df + ( -30A 2
-16AB+ 51B2 )DoDi -B(6A + l3B)Di]v6 + 2 [4(35A + 64B)D~ +4(39A + 97B)D6D 1
-(l43A +217B)DoDI + (-23A + 22B)Df]v6 + (3Do -2D¡)(16D0 +21D¡)v~]k6
+ [4D¡ [64 (3A 2 + 19AB + 19B 2 )D~ + 16 (A 2 + 12AB+ 19B2 )D6D¡ -4(24A 2 + ll9AB
+l06B2 )D~Di -8(A 2 + 8AB+ 8B2 )D6D~ +6B(3A +4B)DoDi -B2 Di) + 8[16(2A
+ 7B)D~ +4(91A + 131B)D6D¡- (220A + 281B)D~Di + (-32A + 21B)D6Df- (5A + 19B)DoDi
+2BDi)v6 + (304D6 + 512D6D¡ -456D6Di -3DoDi -19Di)v6]k8 + 2D0 [8AD 0D 1 (48D6
+8DoD¡ -3Di)(2D6 -Di)+2BD¡ (896D~ +224D6D¡ -456D~Di -70D6Di +44DoDi
-3Di) + ( 128D~ + 1024D6D¡ -632D6Di -38D6Di -64DoDi + 11Di)v6jk10 + 8D6(4D0
-D¡)D¡ (2D6-ni)(16D6+8D 0 D 1 -Di)k 12 ]
Ps(k)
= vf'k[ -4A + B + ( -3Do + 2D¡)l2]
77
(B.5)
(B.6)
P 9 (k)
= vfP (8B [4A (4A 3 + 8A 2 B- 3AB2 -
2B3 )DoD 1 -2 [A 2 B(2Do- 9D¡) -4A\Do + D¡)
+B\Do +D¡) +AB2 (2Do +DI) ]v~ +A(4A -B)v6] +4 (4DI [2 (4A 4 +40A 3 B+20A B 2
2
-18AB3 -3B4 )ifo +A (-4A 3 -8A 2 B+B3 )DoDI +AB2 (7A +2B)Dn +2 [4A 3 (2Do
-D 1)(Do +DI)-2B\7Do -D¡)(Do +D¡) +A 2 B(24D~ +79DoD¡ -5Di)+AB2 (-24D6
+25DoDI +4Di)]v~ + [A 2 (8Do -4D¡) -B2 (8Do + 7D¡) +AB(llDo + 15D¡) ]v6]~
+2 (4D 1 [4(32A 3 + 101A 2 B -10AB2 -20B3 )D6 +2 (-28A 3 - 32A 2 B+4AB2 +B3 )D~D¡ +2 ( -4A 3
+9A 2 B+20AB 2 +3B 3 )DoDi -AB(4A +B)Di) +2 [A 2 (56D6 + 90D6D¡ -47DoDi- 8Dn
+2AB(4D6 + 118D~D¡ -9DoDi +3D{)-B2 (76D6 +34D~D¡ -13DoDi + lODÜ]~
+[A (26D~ + 11D0 D 1 -lüDi)+B( -28ifo- 5D0D 1 + 13Di)]v6]k4 + (8D 1 [4(78A + 74AB
2
-31B2 )D6 -2 (68A 2 + 35AB -4B 2 )D6D¡ +2 ( -12A 2 + 22AB + 13B2 )D6Di
-B(7A +B)DoDj -2B2Di] +2 [8(12A -13B)D6 +4(71A + 16B)D6D¡ -6(27A +4B)D6Df
+(2A -13B)DoDi + (4A + 21B)Di]~ + (-24D6 -4D~D¡ + 9DoDf + 14DÜv6]k6 + D¡ [8 [8(34A
+ B)D6 - 22( 6A + B)DÓD¡ + 8(-3A + 2B)D6Df + (4A + B)D6Dj + (2A - B)DoDi + BDi]
+(120DÓ -188D6D¡ +44D6Df +45DoDj + 8Di)v6]k8 +4DoD¡ (128D6- 88D6D 1
-32D6Df + 16D6D~ + 8DoDi +DDk
78
10
]
(B.7)
P¡4(k)
= fk4 [ 128A 5DoD~ +256A 4 BDoD~ + 128A 3B2 DoD~ + 128A 4 DoD¡v~ + 160A 3BDoD¡v~
-96A 2 B 2 DoD¡ifo -48AB3 DoD¡ifo +64A 4 D~ifo + 144A 3 BD~v~ + 96A B 2 d¡ifo + 16AB3D~ifo
2
2
2
+ 32A 3 DovÓ- 16A 2 BDovÓ- 16AB2 DovÓ- 8B 3 DovÓ + 64A 3D¡ vÓ + 96A BD¡ vó- 16AB D¡ vó
-8B3D¡vÓ + 16A 2 v~ -4ABv~ + 2 [32A 2 (A + B)D 0 D~[8(2A +B)Do +(A +B)D¡]
+4D 1 [-AB 2 (52D~ -44D 0D 1 +Di) -B 3 (8D~ -3D0D 1 +DT)+A 3 (108D~ + 59D0D 1
+4Di) +A 2 B(52D~ + 108D0 D 1 + 9Di)]v~ + 2 [4(7A -5AB -3B2 )D6 + (96A 2 + 35AB
2
-13B2 )DoD¡ + 2(5A +B)(A +2B)Dijvó + [-8B(Do +D¡) +A(13Do + 18D¡)]v~]~
+2 [ 16AD 0 D~ [4(25A 2 +26AB+ 5B 2 )D~ +4(A + B)(3A + B)D0 D 1 -(2A +B) 2D~]
+2D 1 [4 ( 120A 2 + AB- 24B 2 )D~ + 8(A + B)(43A + 9B)D6D 1 + ( 13A 2 - 2AB -16B 2 )D 0 D~
- (16A 2 + 8AB + 3B2 )Dnv~ + [4(12A -13B)D~ +4(69A -4B)D~D¡ +4(23A
+15B)DoD~ -(7A +22B)DnvÓ -2(3D0 -7D¡)(D0 +D¡)v~]k4 + D¡ [ 16D0D¡ [ 16 (19A 2 + 12AB
+B 2 )D~ +4(13A 2 + lOAB +B 2 )D~D¡ -4(3A +BfDoD~- B(2A + B)Df] +2 [ 160(5A -B)DÓ
+4(227A + 123B)D~D 1 -4(22A +27B)D~Df- (47A + lOB)DoDf -4(A +2B)Di]ifo
+(64D~ + 176D~D¡ -54DoDT +39Df)vÓ]k6 +D¡ [sD D [64(7A +2B)DÓ +32(3A
0
1
+B)D~D 1 -4(27A + lOB)D~DT -4(A +2B)D0 Df +(3A +2B)Di] + (384D6 + 864DÓD¡
-300D~D~ +28D~Df -25DoDi + 12Di)v~)k8 +4Do(2Do -D¡)(4Do -D¡)D~(2D 0 +D 1)(16D6
+8D 0D¡ -DT)k10 ]
(B.8)
= r[ 16A(A +B)+ ( 16(3A +B)Do -8(2A +B)D¡ +5v6]~ +4(8D6 -6DoD1 +Di)k4j
P¡s(k)
(B.9)
Q¡(k)
= 2n[2B(2ADo +ifo) + [2BDo(2Do +D¡) +A (4D6 -2Di) + (3Do -2D¡)ifo]~
+(2D0 +D 1 )(2D~- DT)k4] [8AB(A +B) + 2 [8A 2D 0 +4AB(6D0 +DI)+ 3Av6
+B [2B(4Do +D¡)+v6]]~ + [ 16ADo(4Do +D 1)+B(64D6 +24D0D 1 -2Di)
4
+(12Do + 7D¡)v~]k +4Do (16D6 + 8DoD¡ -Di)k6]
(B. lO)
Q 5 (k)
= 4n [2(A + B) + (4Do- D¡)~] [4A (B +Do~)+~ [v~ + 2(2Do- D¡) (B +Do~)]]
Q6(k)
(B.ll)
= [2(A +B) + (4Do -DI)~] [4A (B+ Do~)+~ [ifo +2(2Do -D¡) (B+Do~)]]Q¡(k)
(B.12)
Q¡s(k)
= 4Qs(k)
79
(B.13)
Apéndice C
Expresión analítica para el punto de
inflexión de G1s
A
En el caso A= D 1 =O, la solución real positiva de la ecuación (2.139), como función de los
parámetros, corresponde a
-
¡¿. =-
7(8BDo + 3Va)
192D~
+!$o+~
2
64000B 3 D6 +31680B 2 D~Va + 29160BDovci +4779v~
1~+------~--------~--------~----~
442368D~ -fJ(O
(C.1)
donde
<Ko
=
l
-;
1
X1
2
1
49D 30 ( 8BDo + 3v¡j?.) - 48D03 ( 32B2D 02 + 74BDov20 + 15v4)
0
9216D70
s 2 1 3 24D~~ (16BDo + 3~)(124B2 D~ + 28BDov~ -vci) + 5213 241(¡]
(C.2)
= [-2D~~ (16BDo +3~)(3200B 4Dci -2680B 3D6~ -2508B 2 D~vci -594BDov~ -45v~)
+D~v~ (2BDo +v~)(16BDo + 3v~)(10240000B 6 D~ + 10740480B 5D6v~ + 10812240B4Dciv6
+5897760B3D6v~ + 1528184B2D~v~ + 182680BDovÓ0 + 8085vÓ2 )
80
1/2]1/3
(C.3)
Apéndice D
"
Antitransformada de Fourier de Fij,k
Escribimos una forma tensorial general para F¡;k(x), válida para un sistema isotrópico
F¡1k(x)
X¡XjXk
= F¡ (x)x¡op, + F2(x)xJoik + F3(x)xkoiJ + F4(x)--21
= -(2n)
-d
J
X
~ (k)
dke ik·x FiJk
(D.l)
Multiplicando esta expresión por OJk, o¡¡0 OiJ y x1xkfx 2 se obtiene, para F¡, F2, F3 y F4, el
sistema de ecucaciones
(D.2)
dF¡ +F2 +F3 +F4 =O
F¡ +dF2 +F3 +F4
= d-1 _!_~ fdkeik·x(k·x)
(D.3)
F¡ +F2 +dF3 +F4
= d-1 _!_~ fdkeik·x(k·x)
(D.4)
(2n)d x2 21]
k2
(2n)d x2 21]
k2
F¡ +F2 +F3 +F4 = _ 1 _ _!_~ fdkeik·x
(2n)d x41]
r~ (k·x) _ (k·x)
l
k2
3
---¡;¡-
j
(D.5)
donde se usó que
como aparece en la ecuación (3.20). Llamando J¡ y h a las integrales que aparecen en las expresiones anteriores,
dF¡ +F2 +F3 +F4 =O
.
d-1 1 l J
p 1 +dF2 +F3 +F4 = (2n)d x2 27] 1
p 1 +F2 +dF3 +F4
d-1 1 i J
= (2 n)d x2 21]
- __
1_ _!_~h
F¡ +F2 +F3 +F4- (2n)d x41]
81
1
(D.6)
(D.7)
(D.8)
(D.9)
con
J¡
ri
2D
(D.lO)
= 2~i
h=
3D
r~
2n2ix
2D
(D.ll)
3D
Así, en dos dimensiones,
(D.12)
2F¡ +F2 +F3 +F4 =O
1
F¡ +2F2 +F3 +F4 = - - 2
(D.l3)
4m]X
1
F¡ +F2 +2F3 +F4
= - - -2
F¡ +F2 +F3 +F4
= - - -2
(D.l4)
4m¡x
1
4nr¡x
(D.15)
mientras que en el caso tridimensional se tiene
(D.16)
3F¡ +F2 +F3 +F4 =O
1
F¡ +3F2 +F3 +F4
= - - -3
(D.17)
F¡ +F2+3F3+F4
= - - -3
(D.18)
F¡ +F2 +F3 +F4
= - - -3
(D.19)
4nr¡x
1
4nr¡x
1
4nr¡x
Finalmente, resolviendo estos sistemas de ecuaciones y reemplazando en (D.1),
1X¡ (
XjXk)
0·¡,-2-
4nr¡ x2
Fijk(x)
J'
x2
2D
=
(D.20)
1X¡ (
XjXk)
0·¡,-38nr¡ x 3 1 '
x2
82
3D