Projecte 6: Robot hexápodo
Anuncio

ROBOT HEXÁPODO
AUTORES:
NESTOR SORLI MARTINEZ DE ORAA
PEDRO FERNÁNDEZ GÓMEZ
TITULACIÓN: INGENIERÍA TÉCNICA EN ELECTRÓNICA INDUSTRIAL
DIRECTOR: PERE PONSA ASENSIO
DEPARTAMENTO: ESAII
FECHA: 28 de Mayo del 2003
!
#
'(
)# &
( -
#
" #
& * ( " ( #
+ (
" #
*+
&
" #
$%& # ' (
,
.(
)#!
,
0 (
(&,
/
$%& #
2 # #
#
$
#
*
$%& # '
" #
#
) # .# ')&
$%& # ,
(&
.(
(
&
& #
# '
)(
# #
!( #
( " #
1#
(& ( )#
# #
#!
,45
#
,4 7
3,4
" ,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,6
!
" #
, , ,4
*+ +(
, , ,4
*+
,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,6
#
,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,8
( # ,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,9
, ,3,4 *+ * # #
#,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,9
, ,:,4
,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,, ;
#%
!
(
:,4 7
6,4
&
(& #
" #
&
,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,
) &
*+ &
" ,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,
. ,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,, 3
6, , ,4
*
#
<,4 7 ( & * (
.(
,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,, 3
$%& # ( #
(&,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,, 6
<, , ,4 / (
<, , ,4
8,4
(&,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,, <
##%
,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,, <
,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,, ;
8, ,
# & $( # #)
8, , , 5 !
,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,, ;
,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,, ;
8, , ,
!
. ,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,
8, , ,3
!
. 2
8, , ,:
# ,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,, :
8, ,
#
8, ,3
# .
8, ,3,
$$,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,
= (& >,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,, :
*
8, ,3, ?@ =?
# #,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,, :
# ,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,, 6
@
)
#
>,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,, 6
3
8, ,3,3
&& ,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,, <
8, ,:
#
8, ,:,
" ,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,, <
.4
"(
8, ,:,
#
8, ,6
#
# 5
8, ,6,
#
8, ,6,3
. )
9, ,
(
,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,, 8
,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,, A
. ,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,, A
& ,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,, 9
#
1,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,3;
8, ,<, ?
,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,3;
A,4 7 (
(
,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,, 8
" ,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,, 8
8, ,6,: 2
9,?
"
8, ,6,
8, ,<
,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,, <
"
4
,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,3
" ,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,3
& # ( .(
;,47
" #
,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,3
$%& # ,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,3:
;, , ?
#
;, , 7
#
$%& # ,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,36
,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,3A
;, ,3 7 (
1
& * (
;, ,: 7 (
1
*
;, ,6
(
& * ( #
# ,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,:
# ,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,:3
$%& # ,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,::
:
1. INTRODUCCIÓN:
#
B A; #
# '# #
*
1 '. # (
.
#
&
*#
(
###
/ & #
# '
(
& ## # &
#!0
( #
( "
$%& # ! ( ) .
# #/
& #
( #
( "
.
1#
&
#
" #
& ')
& (
/
#
(& # #
& # ## %
&
# .
# (
"
&
(& (
" #
& #
( ,
. 0
.
(".
#
#
#
$%& # #
(
# /
'
#
" #
( .(
&
)
.
&
(
# #!0
=
*
!
* ( * >'&
7
" #
'& ' /
#
#C '
.
& #
,
# ' #
(& # #
( & # & 1 '
% '
( *
/
.
& &
#
(&
&
,
" )
(
(& (
& )
( "'& #
(
( /
#
&
,,,
1'
/
#
( ) (&
( &
2. Clasificación de robots con patas
7?
*+ -
(
#
*+
&
&
.(
&
&
3&
:&
& # ( #
5D57 75E
2
*+
#
?
&
#
*+
#
& * (
-
(
(%
.(
&
*
5
#%
(%
*
.(
+
!
6&
<&
*+
8&
A&
* #
#
#
2 #
2 #
32 #
(&
6
!*
& #
.
& &
" #
# '
#
$%& #
(%
1# ,
<
?2
G
?
!
#
&
#
#
(&%
# &
*+
8H(
%(
#
?
#
8 (
#
,
#& . . /
/
& (
(
&/ B (
* # (&
'
* #
*
(& ,
# B # '& #
.
#
(
)
1#
#!0
=
>#
&# #
)
& "
!( (
:;;; .
)
'& #
/ &#
# $&
,
(
0& #
7 &
#
# B#
. 1 )
( # #
# # ,
#
(
(
(
?
. # ##
F) '& #
# ' (
# (% (
#
( ,
(
#
5 '
(
(
'
& $( # (
% #
#
&
/
5
"* #
F) !
#
. 0
#
&
# # #
%
)#
# &
,7 # &
3* # #
#,
1 # #
(
# #
*
$
#
%* # & )
3#
&
(
'&
& #
/
,
8
#
&
$&#
#
&
#&
(
#
# '
*
# &
(
# ,
& #
(
(
(&
#& # # #
* # #
( . ###
&
)#
%
/
/
'
# 0/ #
#
)
&
"
!C
(& ,
)(
( #
#!
'#!
%#
#
& # &
(& # ,
'
(%
&
( .
(&
(
#
( .(
4& '
)
(& '
(& #
#
# #
"
(
"
#
& ,
(
&
*
#
#
" #
& !
(
)
A
"
&#
&
# &
. * " &
'# & #
&
# # #
# ' /
& &
*
( . ## )
# #,
&
#
#
.* "
( %(
77
!"
'
#
!
'
& # % ') (% '
1
&
(
(%*
!"
#
&
#
&
&)
!
(
# / & )
& !
, # (% #
# &
" #
'3
"(
)
#
# "&
,
1
* #
# #
)& #
$ . '#
* '*
& # ' .
(
'
& "(
"&
* # )
#
",
#
2 # #
" !
#
?
" #
$%& # #
* # #
#
0*# )
%
& # ( .(
/ & &
$%& # #
* # #
#
/
&
)/
&
$ (
& #
. 1
&
*
# ,
/
&
# ,?
!*
& # ##
%
"
(
9
2 # #
?
(&
#
#
$%& #
' (
#
# * # #
+(
#
#(
,7
#
( )
1#
&
.(
' /
.
& # $%& # & # (
##%
&
/
& * ( " (% #!
* ( ( .(
,
(%
&
(&
# B #
1 ( #
# # # #!
&
%
'
$
!% !%
1
'
#
$%& #
( ) (&
# #
!
#
* ( ( ) (& # = * ( * >'
& #
'/
& # #
!( " #
! #
/
(
#!
#&
#
& '
#
& # $%& # .
& #
/ & '
( )
& ,
&" '% "
#%
( #
'
. .%.
&
/
*
&
!
#
#
&
& #
/
&
&
#%
& " =
#
>,
El movimiento lineal puede pasarse a rotacional con una biela.
;
3. Diferentes materiales empleados en las estructuras:
?
) (
(
( # ,,,
)
(
(& # .
/
#
" #
)(
,
(
1 # '(
/
7 # &
%! ( # &
B' # '
( 0 &
#
!
" #
(%
/
&
"
/
1# ' ( - !
#
#
,
'&%
(& # % (
#
1
" #
)
(
(& # &
" #
&
&
(
( # & & "* ! #(
')
.
(
# #
,? &
%
# #
* # #
,
(
(
'
& #
& 1
& (
# #
(
'
'
(
I
# #!0
#
,
!( #
/
#
4. Construcción de las patas y tipos según aplicación.
?
&
&
# B
#, # #
$ ( #(
# B
1
&
&
*+
&
(&
# #
)# #
(
#
/
.) ( .
0*#
.
$%& #
( . # #. # ,
(% * # #
/ ( ,
#'
(
.
) ( - *+
* # #
* # # ( . # #')
(
%
( .(
/
&
* # #
#
&
3* # #
#
&
1
$%& #
* # # ( . # #'
# B
& ! &
& #
( . %
, ? !* (
&
(
' ( )
1# &
,
& ( ) !
# /
1
$%& # ?
# &
'
&
# ##
&
& 1
%( ' / & ( #
!( " #
* ( #
,
5. Servomotores
. (
' *
A;* # ,
?
( .
'
= * #>(
(&
&
. & #
& # *
# #
.
(
#!
# &
#
&
" )
'
(&
%
"
&
#&
( # #
# ## *
#
(
(
#
,
(
( #
# &
0
#
,
(
&
" #
,
&
&
& #
( &
#
&#
#
# A;J'&
'# & # # #
# .
( .
# #'# (
&
#
& # ( #!
&
",
/
(
$%& # ,
*
# 3<;J&
(
(
@
D ( # &
*
#
#
"
#
(
? /
)
*
! 1
!
& #
#
@
K#
4 LK#
4
3
& #
# #
7 (
*
#
7 (
)&B
2
#
7 *M B
'&
(&
(&
# ! 1
7 (
.
#
"
##
' . '(
( (
.
' ,
#!
=*
? ! 1
*
!
D N O ,7 (
# *
*
! 1 L & & #
&
N O L,
&
#(
),
( .(
& &
*
#
#
>,
.& # ( #!
!
&
#
)
( ) /
? .
# #)
*
* /
&
#
*
7 N ) , 7
#
#
# B# &
. &-## ,
.
&
# " 3
# #& 3 )
(
& # !(
# '&
( ) /
#
# .
! 1
.
#
*
& # (
'
( 1
#!
#
#
#
(&
#
3
# ## ( ) '
(
P
'
(
*
*
#
# # ) &
#
&
'/ *
L
*
&
(
.
(
'
P
# ( ),
*
# .
# A#
*
(
& #
(
# ,
&
(
.
## (
# 7 '
(
,
*
,
# " 9
# ## ( ) ,
,7
!
# #, ? #
#
:,
*
#
#
#
:
7
#
.(
6. COMO PROGRAMAR UN HEXAPODO MEDIANTE BASIC STAMPS:
?
57
(&
&/ B
(& #
.
#
>,
& * ( #
& # *
( (
(&(
#
&
5L & #
# #
(
&
"(
' , Q "
&
(&
4 '
(
# '
( )
).
,
(
)
*
$
57 =
57'
# '
#
.
(&
(
& * (
,?
&
?4 . '
(
'?
'&
'
(&
( '
&
5L
& #
)' 4 3
C F'
& !/
#(
(
,?
#
(
?
(&
% #&
#.
( B ).
## ' #
.
&
( (
# B "* '/
* # # .
'
# '
')
57,
& * (
57
(
#
( (
'
0# &
&
&,
&
&R R
. 1)
1
&
" #
#
&
5L
#
#
&
&
, 7 (
57
(
#
'- & #
& * ( # ) & * ( # (
# . '
# ##
( (
' (
( ) 0#
57 ,
& * (
57
(&' #, " #
5
7
(&
)
!C
# &
# )#
*
& * ( ,
6
?
57
#
(& 5=
(& 5@ , >&
& ( # # ;;;
L *, ?
1 "' (
# 6;; <;;
*
+%
*
,-
.- -
? &
##%
$& (
",
#
-
A&
57
)
5L ' (
# A; ;;
(& 55&
<&
5L )# &
& ( # # :;;;
)
L *,
!
-
&
1"
( -'
$" ,
# #
& . .
4
(&
+
,
&
% & &
$& (
",
&
)
9
? #
" #
S
# &
,
&,
* # # .
T"
&
,=
L
4
(&>
,
<
+ &
=
( # #
)
$
*
(& ,
(0 ( )
(
",
! >O
#!
#!
#
/
& #
& # !
457'
Microcontroladdor
Velocidad en la
ejecución de
programas
&
(
#
) &
& )
4
'
(&@ 4
Microchip PIC 16C56
457'
4
Microchip
PIC 16C57
& * (
#
(&
",
#
,
4
Scenix
SX28AC/SS
( #
#!
#
4
Scenix
SX28AC/SS
4.000
4.000
10.000
2.000 instrucciones/seg instruccione instrucciones/se instrucciones/s
s/seg
g
eg
Velocidad del
procesador
4 Mhz
20 Mhz
Tamaño de la
memoria de programa
EEPROM
256 Bytes
2k Bytes
Tamaño de la
memoria RAM
32 Bytes (6 for I/Os y 26
para variables)
Scratch Pad RAM
N/E
N/E
N/E
63 Bytes
Número de
Entadas/Salidas
8
16
16
16
Intensidad a 5v
2mA modo Run y 20 uA
modo Sleep
Source / Sink Current
por I/O
20 mA / 25 mA
20 mA / 25
mA
Nº pines del Socket
conector
14 Pin Dip
24 Pin Dip
24 Pin Dip
24 Pin Dip
Nº de comandos
PBASIC
32
36
36
39
Interface requerida
para la programación
desde el PC
Puerto Paralelo 3002,4Kbaud
Serial 30050 Kbaud
Serial 300-50
Kbaud
Serial 305-115
Kbaud
20 Mhz
50 Mhz
8 x 2k Bytes c/u. 8 x 2k Bytes
(16k Bytes)
c/u. (16k Bytes)
32 Bytes (6
32 Bytes (6 for
for I/Os y
I/Os y 26 para
26 para
variables)
variables)
32 Bytes (6 for
I/Os y 26 para
variables)
7mA modo
20mA modo Run 60mA modo
Run y 50
y 100 uA modo Run y 200 uA
uA modo
Sleep
modo Sleep
Sleep
30 mA / 30 mA 30 mA / 30 mA
8
Tipo de Software
editor de texto usado
en el PC
/0%
"
!
*
&# (
STAMP.EXE (DOS)
1
( .
(&
(
# (
!
4,
(
, 4, 5
#C
R
,:4,
&
(
0& '
= & #
#
#
.
! 1
R
/
/
#
(&
(& )
(&, =?
( # ')
? #'
&
!%
( .
(
,7
/ # B( ,
(&
'
= ; (,>&
R !C
(& &
( .(
%
#& # # # ( #
7>
(&=
(
# "(
#'
&
! &
(&
, 4,
4,
0&
.
(&
R
,34,
STAMP2.E
STAMP2.EXE STAMP2SX.EX
XE (DOS) o
(DOS) o
E (DOS) o
STAMPW.E
STAMPW.EXE STAMPW.EXE
XE
(Windows)
(Windows)
(Windows)
( .
!
(&5'55'
55' 55
& (
/
>
' ,>
$& (
,
(
, 4,
!C / #
#& # #
(& /
(&'
(&55
(&55 =
(&5&
7,
#
(&, $ #, # R
R ( #!
& * ( # #(
" /
(%
OO>,
& * ( /
#, # "' %
#
# ( .
,(
7' &
%
(
*
R
#C
,7 *
!C &
>
( (
%
& / B & * ( =& #
1
#
/ &
& * (
(&, $ )
,
&
(&
#
! #R
, 4,
(& '& #
& * ( /
. #
#
#, & # $& (
& * ( / (
(
'( #! #
(%
,?
&
( . % (
( # R&
, 7 (
R,
A
*
( .(
#
#
(
(&55#
+(
(
;;&
;;;&
+(
A6 ) 6
;)<6636,
#
(&5')
U . N& ;
U . N& ;
U . N& ;
!
!
!
N
8;
N
8;
N
A;
&
;'6;
&
;'
3;;
&
;'
8;;
&
;
&
;
&
;
$
!
$
N
8;
!
$
N
8;
!
N
A;
&
;';;
&
;'3;;
&
;'
3 ;;
&
;
&
;
&
;
$
$
*
$
*
* (
(&45
(&4
*
* (
(&455
* (
(&4554
9
7. Sensores
'
!(
( (
#
.
.
*
(% /
( (
#&
-
. # B# &
'/
(
&
#& .
' 7' 7 '?
>')
1 " #
,, #
(&
?
.
" #
"
%
(
&
#
! ')
( ## ,
'
. * "
( # #
" ,
!
&
(
# (% #
1
#
(
/
+
& ! ' (
!( "
' ( & #
*
&
!( "
" '.
2
#
!( " #
( *
! )( & ,
1# ( #
/
(&
. ,
#
.
#
(& # #
&
'
#
1 " #
/ . 0
##
(&
( *
3
-
'
",
-
)
& . =
! "
# ( # ( * # / '
#
# . 1(% &
' # .
(&
( #
/
' # '/
.
* (
' ,,,
#&
#
7
)
* ( #
'& /
#
#
'# . " '# & $( # # #
,,,
# #)
#
$
#
%
!
'
"
'&
-
& "
#
# & . SHARP IS471F (
!
# 1 ( ,
&
( # # L# ( # #
* #
)
.- #
&
:
# # ?
# !
$
'( # #
B /
( %'&
& # &
5 :8 D /
& ,7 #
+ !
#
(
L & & #
1( #
! # )# ( # # &
.
#
&
/ & % .
B
& #
!
(
!
,
# 15 ( # #
# &
1 ( #
D
(
& #
( #
,7
# 5 )&
*
&
(
.(
1#
(&
!
,
7 ( & # .
/ ( '
@ )2 # & . (
' &
# (
$
,
#
&
"(
(
#
&
"(
( )
#
/ & # #
/ ( .(
(
&
(
&
# # #
)
.
#
'(%
%
,
!
&
)3 )
# /
/
#
#
1( # &
# #
&
:
,
;
&
4
&
&
5 )
"(
'&
.
#
')
#
#
*+
" "
6
(
# !
(
#&
# ,A ((, )
*
(
#
" #
&
& #0
#
/
' #
%
&
! $" ,
/ .(
# .
#
(
.
# / .
,
*
# # (
( #
# &
V7
#
# #
!
&
#
* # # #
,
) 0
#
#
#
#
* #
( &
.
L )
# &
# ,
&/ B # & .
!( #
)
&
/
/
* ##
# # 96; (, ) !
&
) &
# (
( ( #
"' #
% & # # !
#
& # &
((,
!* . (
# # (
#
#&
!
"
1/
# 7 Q8;(
# ) !
#
=
(
&
#
# # #
>
)
# #
#
&
' 0&
,
!
# %( '
(
1 ! # # (
& &
,?
" !
#& .
"* ) .
# ( # &
# # # 1 ! # ' 0& &
# #*
& #0 &
#& #
**
( ) 0
# #* &
&
( ') /
# ## # & . )
&
#
. " #
#
*
( .
#
=. $&
"
/ ( # ?
>,
.
&
( (
*
#
(& ! # &
!* #
( #
(& # '
# #
# (
B
# #
&
$"
# #
/
V7
# ,
7% "
# #
?
## #
( .
#
& !
(
( #
(&
).
1
# &
1 " ( '
0
!
#
(
) /
% #
# #
(
>,
#/
?
# # ? 36A .
# ;@ &
.# #
(
#& #
; 6@ !
,
4
7 (+ (
'# # &
5
(
&
(
1#
& (
W
)
(
.
#
#
!
" "
6
#
& &
#& # # # ( #
2
" !
#&
/
#
.# ##
7% "
#
(
)
# &
"*
(
;
3'
3@ &
=&, , 8:? :>&
#
# #
= !! >&
",
# &
1 " # ;F /
. . (
(%
=
* # #
& !
!
#
.
#,
/
&
.
**
.
# ;F =
B #
#
&
(
( . ( /
#
# # LM358 &
.
,
#
%* #
1# '
&
# # #
#
)&
. "*
'
/ & #
!( &
# .
?#
#
" # 0
#
( -, 7
#
#
&
#& . #
! $" &
& " #
1# 1/
#
# & #
"* '#*
. (
1 !
& ( # #
# (
) # 1! ( #
+
)
(
'
1.
#
)
#
%*
#
" #& # # #
#
) 0 #
) # 1 #
+
&
!
# 5'
'
#
&
#
!
6 (,
#
( -
( ## #
* #'
1&
.# &
&
0
%
!
1/
# 1 !
/
#
&
& " #
)& &
&
# # & .,
1 #%
&
#
%* #
& " #
1# 1,
& # # # ( #
*#
(
#
# ( #
( #
( #
"*
77
&# # #
( #
(
*# & .
!
#
#*
.
# #
(
& &
# (
#
%#
( # " #
(
! ,
Rango de medida
Datasheets
GP2D-02
; A; (,
GP2D-05
; A; (,=#'(
GP2D-12
; A; (
GP2D-15
#,
GP2D-120 :
: (# !
3; (,
%
# (
-
#
/
( ## ,
$
)
#
%*
.
,
#
%# A
( #
)# & # # #
(
,
&
&
1
#
Tipo de salida
*
A
& ,>?"*
"*
=;43@>
"*
=;43@>
?"*
Usos: Debido a su gran rango de medida este sensor es adecuado para detectar obstáculos reflectantes
como paredes, usado en robots de exploradores para los de laberintos entre otros.
Ideas y mejoras: Debido a su gran directividad se puede montar un sensor GP2Den un servo y así tener un
radar de IR cubriendo de esta manera un radio de 180º aprox.
3
Descripción: Los ultrasonidos son vibraciones del aire de la misma naturaleza que el sonido audible pero
8
de una frecuencia mas elevada que parte de 20 000 Hz hasta 5.10 Hz. no audibles estos por el oído
humano. Se alcanzan longitudes de onda que se aproximan a la luz visible.
Funcionamiento: Para producirlos se utilizan las propiedades piezoeléctricas del cuarzo. Es capaz de
detectar objetos y calcular la distancia a la que se encuentran, enviando un pulso de frecuencia y midiendo
la anchura del pulso de retorno.
Usos: Se utilizan en la obtención de emulsiones fotográficas de grano muy fino, en sondeos acústicos
(detección de fisuras, mediciones, etc.. ), como bactericidas y como limpiadores de superficies entre otros.
2
-
!"#
(&
" "
6
&
7% "
/
(
(%
#
#&
# #
(
&
*
(
( #
*+
#
*# ,
&
# # &
&
(+ =7>) # & = > %
& #
&
#
(&
&/ B &
& #
&
" # &
#
. = >' & #
# '& /
)
&/ B
'
#
! #
# #
&
# #) /
5 )
& $ &
7.1.3.
(
(
(
&
#
" #
# #
(
(
& #
(& #
%
%
&
)
%
#&
#
,
( ) #
.
)
(&
#
#
!
" #
&
)
& (
#
)
#
(&
&
,
" !
& "
#
4
.
(
#
&
(& &
#
(0 ( # 0
#
#
,
1
,
SENSORES DE VELOCIDAD:
& # #
.
# ##
(
* '&
&
"
# #
& #
( # " # .
## *
#
(
/ ( .
&
#
, ? ! ( (% & &
#
.
# ## * #
(
'
1 &
# (
(& #
# / / (
.
# # * ') /
.
*
. # ( # #
"
! " # .
# ## * #
'
:
&
(
/ .
#
! ( ( )!
/ -.
# #*
#
')& # *
$
( .- #
#
1 (
& #
& ! #
# % .
#&
#
( ## ,
. &
&
!*
( #
"
"
& #
#
(
,
# (
( ## ,
&
#
# (
# ## (
,
.
" & #0
&
# *
(& ( * - ! =
# &
(& ( * - ' / & .
#&
&
. & #
#
*
.
# #'
#
'# & # # # !
## * ,
!
*0 '& &
/
.
*
#
( # .
# #'& # (
. *
'
& #
( %
&
#
&
#
/
(
)/
.
& #
#
1 (
#
*0
!% (
!* ,
(
(
>,
,
/
*
.
(
" # ;'
6 X'&
( #'
'
& *
/
& #
( #
&
%
.
# #
#
## *
"
,
$
%!&" !'
()$
*
+ "&%,- )!"#
& #
&
&
( *(
/ . 0(
#
&
" ?@ , ?
?@
#
+
( *& (
!( # .
I
+
/
#
#& . ) .
# #. (
( #,
)
#
.
#&
#
&
#
,
) # D # )'
&
#
#!
#
&
& &
(
(& ( * /
% ( # ,
/
+
(% & (
'
(
(& " & #
& . # &
( .(
# #
+ ,
0' ( #(
#!
# &
&
& # ( ##
.
##
/
( .#
+
)'&
*
'
(
#
-,
6
?
#
& ! ,
)
(
& !
!
&& ( #
.
##
#
. " # # & 1(
!
#
& !
/
% ( . #
#
( ( 0 ( '# #
(&
#
!
#
# (
% ,
7 (
& # &
#
' .1
( #
"
* (0 .
# # # (". >,
&
1
(&
" # # ! # !
-
7.1.4.
&
& #
#
! 1/
# .
#
& *(
"*
(
! 1
'
# (
# (
#
'
"
(
# '&
# &
.
( ) (&
(&
&
#
(&
.
.
.
# ## .
###
# ## .
(".
#
+
& )% #
" ( # &
&
/
!
#
B
& ! = &
#
B
,
' & #
#
#
,
') /
') /
!( " #
& #
( .(
,
"
"
!# &
'
$& (
/
1
#
# ( # & "
& #
* # ( (
# ( # .
# #' & .
#
1 ')
&
"*
( '
" & .
#
#
/
)
! 1
.
# &
* # /
* # & ## # " *
&
)
/
# ( (
#
/
( #
#
( ) (&
,
.
(#
&- # '*
"
! 1 &- #
/
#
"
"
#
&
*
,
,
(&
B #
( .(
'
&- # # & - #
#,
#
# &
" &
# &
"
! 1 #
(
( .(
#
# /
( .(
B #
&
" #
/
( #
# &- # ( #
!
, (
&
" ,? &
(
' & &
"
"
<
/
#
" !( # &
%&
(- /
( (
)
#
& #
"
(&
&
6 2 Y4 '
6 2, 7 #
. #
" #
& #
# (
# #& '
-#
.,
+
& #
(&
) *
,
#
. # ##
# (& '
( #
1
*
# #
& "'
*+
# &
( (
/ & (
.
#,7
0
"
$ :@ '7
$ 6;
( '
$ ; ( ' (&
4 ; A6J7, (
8 $6 ((,
/
2 (
8
0
" "
6
# (
&
#
# # (
7% "
" !
(
/
)
%*
#
,
& #
/
#
#
1)
( ## #
%*
# (
) / #
(
!
/
( ## /
. * #'
1 ( #
# '
& .
# &
#
.
#! " /
#
&
"
&
( # #
" #
,7
+
#
0'/
(
&
&
1'/
*
/
# # * ,
#
&
,
( -
& ,
# #
(
& &
&
,
#
)
&
& &
8
0
1
#!
( (
& /
'
#.#
1
#! " #
0
#
#
" !
$
/ #& # # %*
.
@ N@
# #
#
(
&
#!
"#*
#
" # # '
+ '
# # *
2
" "
6 7
7% "
') / # &
" $ ,
=&
# >')
#!
"#* 2 ),
*
#!
,
# #
.
@ 3N √3@
(".
* #,
# *
!
=C > / @ N@
#
(".
B
#
# * ')
# # :;; 1'
1( %
)
*
!
*
! ,
#
",
# ! # 9;J
=C > /
#
=C > / @3 N√3@
!
# ! #
=C
;J=
>
=/Y ;>> @ N√3@
==C
=/Y :;>>
A
8, ,6,:,
? *
&
#& . /
)#
( #
%* # * #
*
&
( ) #.
) (&
'&
#
& & ##
, #
(
1 # * . 1 $& (
#
*
# (
)
* ,7 #
# *
#
*
"
'
.
/
0#
&
&
& ' *
&
&
# ( #
%* # * #
,
)(
& #
( ( &
& '
*
# &
#
( /
( 1,
%#
,
9
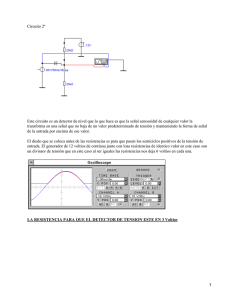
2 *
.49
Se usan para detectar niveles de luz ambiente o seguimiento de luces o linternas, así pues podemos crear
un seguidor de luz con varias LDR dispuestas alrededor del robot y hacer que este siga una luz directa que
le enfoque, también pueden usarse para encender los focos o luces de balizamiento del robot en ausencia
de luz.
3
Descripción: La LDR (Light Dependent Resistor) o resistencia dependiente de la luz, como su propio
nombre indica es una resistencia que varia su valor en función de la luz que incide sobre su superficie.
Contra mas sea la intensidad de luz que incida en la superficie de la LDR menor será su resistencia y contra
menos luz incida mayor será la resistencia. La forma externa puede variar de la mostrada en esta foto ya
que este modelo en concreto no es muy común pero la función es la misma.
Funcionamiento: Para hacernos un medidor de luz ambiental o una fotocélula que encienda un
determinado proceso en ausencia o presencia de luz podremos hacerlo de dos maneras, usando un
amplificador operacional para detectar y ajustar la sensibilidad y punto en que se dispara la salida como en
el caso del CNY70 mostrado mas arriba o bien hacerlo como se muestra en el siguiente circuito, que es en
base a un disparador trigger schmitt TTL que conformara una señal totalmente compatible TTL para ser
aplicada a un microcontrolador o puerta lógica compatible.
El circuito consta de un divisor de tensión formado por la LDR, una resistencia y un disparador trigger
schmitt inversor modelo 74LS14. Como la LDR varia en función de la luz, la señal de salida del divisor
también lo hará y cuando pase el umbral de disparo del trigger schmitt este cambiara el estado de su salida
según corresponda.
3;
Los umbrales de disparo para el 74LS14 son de 0,9 y 1,7 voltios, esto quiere decir que cuando la señal en la
entrada del disparador supere los 1,7 voltios se tomara como un 1 lógico en la entrada y la salida al ser
inversa tomara el nivel lógico bajo o 0 voltios, si el voltaje de entrada baja por debajo de 0,9 voltios se
tomara como un 0 lógico en la entrada con lo que la salida tomara un nivel lógico 1.
El problema que se comentaba en la explicación del CNY70 radica en la distancia en voltios entre el umbral
de disparo alto y bajo, que es de 0,8 voltios entonces imaginemos que si la luz recibida en el sensor va
incrementando hasta llegar a los 1,7 voltios y rebosarlos este será el punto de activación pero no se
desactivara al volver a pasar por este punto, ya que la salida del circuito no se desactivara hasta que no se
baje por debajo del umbral de 0,9 voltios, esto hay que tenerlo muy en cuenta ya que para algunos casos
donde los niveles a detectar sean muy distantes como por ejemplo detectar niveles de todo o nada o luz y
oscuridad puede dar igual pero si lo que se quiere es activar algún circuito en un determinado nivel de luz y
desactivarlo justo cuando ese nivel ya no exista, entonces el circuito ya no es valido y será mejor usar el
circuito basado en amplificador operacional en modo comparador de tensiones.
Nota: El circuito integrado 74LS14 dispone en su interior de 6 puertas inversoras trigger schmitt, así que hay
que tener especial cuidado en no dejar ninguna entrada no usada al aire, esto es sin conexión alguna ya
que la puerta empezara a oscilar y podría causar la destrucción de dicha puerta, para que esto no suceda
hay que conectar todas las entradas a un nivel lógico estable, normalmente a GND. Las salidas se dejaran
como es lógico al aire ya que tendrán el nivel lógico inverso que en su entrada.
Usos: Las LDR se usan para detectar niveles de luz ambiente o seguimiento de luces o linternas, así pues
podemos crear un seguidor de luz con varias LDR dispuestas alrededor del robot y hacer que este siga una
luz directa que le enfoque, también pueden usarse para encender los focos o luces de balizamiento del
robot en ausencia de luz.
Ideas y mejoras: Una mejora es sustituir la resistencia fija del divisor de tensión por una variable de valor
adecuado, para poder ajustar el umbral de disparo. Podemos construir hexápodo que siga la luz.
8. COMUNICACIÓN ROBOT-USUARIO
" .
&
#
&
#
&
0/ #
, (
(&
?7 ' & * (
%
"
?7
("#
/
"
# #
57
(&5#
:; "
< *;
&
(
"
57
!
=
+
& & )
/
0 5L 'Y6 .
7 )
')
(&,
(& '& (& ( R
*
"
R
SEROUT 0,N2400,("hello")
?
#
&
#
&
=4
$ <4
0/ # /
#
(
0/ #
,>44 K 89 ;
&
&
&
(&>
=:4
(& , =
$ ;4
,>44 K 89 9
3
9. LOCOMOCIÓN
?
( "
&
*
&
( &
" ) /
/
%
)# %( (
, * # # #!
#&
* /
$%& # ( '# & # #
#
/
),
(
#
# * # #
#'& # (
( .(
* ( #
Z
.(
!% ['
& #
(&
( 0(
(
(
( . # ##
& ') (% (&
/ ( /
( # (
" ( &
&
%#
%
/ & # # /
'&
#&
#!
& #
)
1
# ( #
* ( * (&
'
) *
(
( .(
#
&
(
&
)
&
#
*
"#* # * ( &
!
#
,?
#
( #
*
*
( .(
(
# # (
&
!
#
. 1'#
!( /
#
&
*
( '
#
" (
'&
&
!
/ &
#C )
(& #
!C ,
9.1
?
"" !
!
& # ( .(
0& # ,
"
"" !
?
*
0
#
%
%
#
$%& #
#
.(
7 # +& # )
.(
,
&
& #
( .(
* #
.# # /
'
/
#
#
(& (
/
&
.
'
,
#
3
"
&
#
"" !
>
& # ( .(
'
(&
#
& # & - & # (&
"6
%
(
#
#
(& #
#
$%& #
(& 1
#
') )
D
&
& #
#
%
# &
,
/
/ &# & #(
( .(
0& # )
*
'& #
# &
&
# &
# #
&
)
&
%
'
( .
" #
&
%
#
,
(
1
#
(&
/
!
!
,
(
'(
&
# &.
1
'& (
/ &(
&
( #
# +& # ,
##
& #(
,
, ?
#
&
&
1/
##
&
*
&
&( &
#
%
*
)( #
&
,
. #
') &
&
( #
"'
%
&
#
33
D
& #
# && &
&
# &
D
3 ?
&
#
& #
D : ? &
(& ( # #
# &
,
D
&
6 ?
D
<
)&
&
#
#
%
*
.
*
&
&
&
'
"'
"
#
&
' ( #
(
')
&
&
*
,
# &
#
&
(
*
*
(
,
& #
!
" #
. #
( #
,
&
&
#
') &
# &
10.
) ( # ')
&
1/ #
&.
*
)#,
#
)&
' &
(
/
"'
+
" #
&
(
( #
#
+
,
Construcción de un robot hexápodo.
7
#
#
(
(
# #
1/ # &
$%& # / # & # %#
*
# ( .(
1
( .(
,
.(
#
&
)
1
#
( .(
'
&
" # (
&
# @7 # 3 (( #
:
# ((-
A
(
A
:>
3 # ;((
(&
# (-
#
&
(#
&
) ;$ 98 ((= ( B
3 # 6((
#
<
&
# (-
#
#
3
3
# '
: ((
(
# <;$ A (( =& $,>
3:
?
.
!% !%
& <'
$ /
' 1 (
@7 # 3(('/
# &
'
"(
)!% #
1 ' # (% #
& (
#
* #
!
, ( - & #
1
( & #
!
# .# '( # #
&#' (
(
& 1
(
#
!* ,
& & # ##
(
. #
# #
(% # '/
# %
,
. 1 *#
(
D*
, &
#
# # 6;X,
Q
#
&
#
& 1 '
# ! #
. 1/
/
,
(
&*#
1 (
& # &
" #
&
(
#
(
#
( ( '&
'
( #
1'
#
$%& #
.
,
&*(
)
#
(
' * #(
#
.
( (
& !
.
36
D
,
.
&
!
(
.(
#
!
! #
#
& #
)
,
D 3,
# .
.(
&
&
&
#
) (
! #
& #
/
%
&
" & & ,
&
#
( .(
'&
/
#
&
(
& #
.
!
*
' (
1 #
&
&
!
)
1(
/
& !
& '
.
# /
#
,
7
)# #
#
#
.
%*
$ ( ) !
!
/
0(
# # & . (
&
!
: )6 /
.
*
( .(
1
) ! # '&
(
&
/
& 1
" #
1#
( #
(& '
&%
,
?
& #
&
#
@7 & /
(&
&
(
'
#
! 6'
& .
( .
#
# ;(( &
;
&
'
#
/
& ( /
&
&
& 1 / & # &*
$%& # ,
;(( #
(
& #
' & #
!% (
'
# & .
#
/ #
&
#
3<
D
:, D " #
&
.(
' )/ &
(
#
/
# &
&)
D 6,
! #
.(
/
# )
&
"
& # &
&
(
.
(
&
#
38
,
?
" %"
!
. 1(
# '
!
#
!( # &
1 # &
& (
9
#
(
#
& * ( # &
57 <DA8<
& # /
#
. &
# (% & & #
#& # # .
3 '
# # #
G4
(
0
7< ) 78 # (
#
#
#
# #
(
6 =2 >#
=
># G4 , @
#
1 # 6
.
# (
(
#
!
& &#
# ,
.
9
# * ( #
57 <DA8<
(
1)
' (
/
D
<,
& . (
#
57,
*
& * (
# #
# 8&D&
# )
# 7? & & .
#
( ,
#
# # '
1#
# &
" ')& + (
&
#
# # ' 1 #
' # '
: =2 >#
G4
$" # D *
/
)
3)
0
1
0
# (
=
>#
,
D*
G4
, 7
4
3,
) 9
$
#
#
&
#
3A
D*
,
/ (
-
#
&
#
#
$%& #
39
# (%
# #
#
>G:'G6 ) G< &
0
'
) \
, 0( (
G;&
#
#
(
G 'G
"*
#*
)
& .(
.- #
& &#
#
$%& # ,
*
& " & !
!*
:
& # .
#
#
&
(
&
.(
#
' 1/ # )
&
& .
&
$#
(
$%& #
0
3' :' 6 ) <,
0
;)
'/ & #
1
&
# #
(
G < )G 8 %
#
# 33; ( & & #
?
/
(
G\
3
0
;&
#
#
# ' *+
## # & *
#
&
')
(
# (
#
&
(&
=&
.(
G8'GA '
G9 )
&
(
) 3
(
/
& #
( # ,
( B
&
&
,
#
#
#
#
&
,
&
,
:;
(
* (
,
#
:
? #
,
,
3,
:,
%!""@
,
. -
&(
* # (
&L
LCCC, , 1L& L& ^ , (
57 # C # 7 , $ ) !
* (
!*
(
" &
& * (
*
&L
LCCC,(
& , (L # #
A8<4;:, $
#
/
.
A8<4;:, $ & * ( #
&
",
#
& * (
A8<4;:, $
& * (
( (
# & * ( =;$ D;:4;$ DDD>,
;$;;;: # ( (
;$ DD ) #
# ( (
/
;$ !;:,
( & # ( (
#
& # ( (
*
& #
&
#
C ]
#
# /
6< ) #
&
#
& * ( & #%
& # #
&
"
" #
# & * ( # % #
&
# ( (
;$ !;;
57 <DA8<LA88
D *,6
#
( -
#
#
/
(
!*,6
# ,=AH ) >
:
? $
-. 9- .- - A-
,
&(
(
,
#
*
( "
1
57 # C
#'
(
&
,
.
.-
# #
* # & * ( #
# # 7
)/
&
&
7( #
*
'
' 1(
& * ( # Z * [! C '
(
C
&L
LCCC,(
& , (L
(
/
(
!* <,
D*
3,
#
)
.1
<,
(
.
###
( "
# '
9 ;;' &
#
(
"'
(&
(
#
7
)
(
(
# & * (
"#* $ # ( / / (
*
(
'&
(& ?7 , $,
& * (
#
.#
!
& * (
' /
& # .
"#* # & * (
*
&
#
" # 7 # 'D * 8,
.1
#
& * (
*
&
"
,
D*
:,
* #(
*+
.
6,
. .(
&
1 #
" #
*'&
8
) & * (
*
(
# # #
* =0
1 >)! 1
&
# #
'
& * ( #
#
57,
& #,
,
:3
? (
A - -
-B4
. C 3-
&( & * ( /
1 %
( .(
&
" #
' # & 1
&
"
&
" #
,
&
$ (
!1
' )/
,
? #
*
&
0
B
/
#
& #
$%& # ' ( 1 #
) * #(
$ ( ! & &
#
.
( .(
#
.(
/ & #
.
*+
. /
(
!*
*
1
& " & #
#(
B '
# # %
.
#
& " ) A.
(& /
#
*
( .(
' # ( /
(&
#
#
; # ;'
6( '# (
(& /
#
*
& "
.
,
,
&(
/ (
;( =:;
*
*
>'
( .(
%
* * ( # & * (
(
(%
(& /
!*
B
1
A,
#
(
.
(& / . (
/ &
# .
1
(%
(&
",
9,
::
#
( )
(
.1 *#
& * (
(
) (&
! .(
1
/
/
& % ( )! 1
(
.
;= ;;
*
# '& # (
.(
! " & #,
# & 1(
( % '# (
#
(& >,
#
#
&
#
.
(&
/
:6
:<
:8
:A