05-Protocolo de reconstrucción
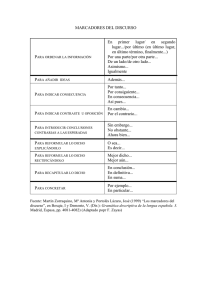
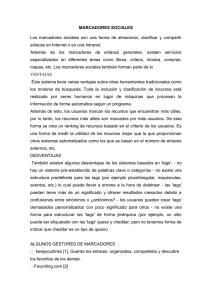
Anuncio

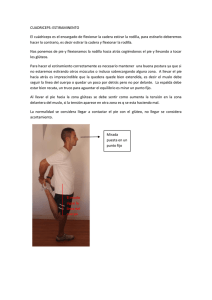
4. PROTOCOLO DE RECONSTRUCCIÓN En este capítulo se detallan los modelos de reconstrucción utilizados para la representación del cuerpo humano. En primer lugar se describen las características generales de los modelos multicuerpo del esqueleto humano. Seguidamente se detalla el modelo Plug in Gait utilizado, parámetros del modelo, marcadores y geometría empleada. Por último, se incluyen las modificaciones aplicadas al modelo PiG. Por un lado se utilizó el sistema de corrección de la rodilla, KAD, desarrollado por la empresa Vicon Motion System. Por otro lado, se aplicó el modelo desarrollado en el Departamento de Mecánica de la Universidad de Sevilla, Plug in Gait Modified, cuya única variación consiste en la adición de 4 marcadores. 4.1. MODELOS DEL CUERPO HUMANO Durante la marcha, los segmentos del modelo se rigen por movimientos no lineales, de ahí que el sistema multicuerpo sea una aproximación muy adecuada para el sistema esquelético. La precisión de cualquier simulación es tan buena como su modelo. A la hora de asumir un modelo mecánico del cuerpo humano se asumen ciertas condiciones [1]: Cada segmento tendrá su masa localizada en su centro de gravedad. Las coordenadas locales del centro de gravedad de cada segmento permanece fijo durante el movimiento. Las articulaciones son consideradas como pares esféricos. El momento de inercia respecto de su centro de masa es constante durante el movimiento. Figura 14. Modelo del cuerpo humano [2]. 23 Tomando como referencia el modelo de Newington [10], se define nuestro modelo del cuerpo humano como una serie de segmentos, unidos por una serie de articulaciones. Estos segmentos son idealizaciones de los huesos del esqueleto humano y no coinciden necesariamente con su misma longitud, diferenciándose entonces, la longitud biomecánica y la longitud anatómica. En este proyecto nos centraremos únicamente en el tren inferior del cuerpo humano, de ahí que definamos nuestro modelo biomecánico de pelvis abajo. El modelo de cuerpo completo se compone de 7 segmentos; dos pies, dos piernas, dos muslos y la pelvis. El modelo mecánico tiene, por tanto,24 grados de libertad en total: Tres grados de libertad de traslación para la pelvis, que define el punto de referencia del cuerpo. Tres grados de libertad de rotación para cada segmento (consideramos uniones esféricas en las articulaciones) [3]. A pesar de que las articulaciones presentan superficies de contacto de mayor complejidad, para simplificar las tomaremos como superficies esféricas, como se vio en el capítulo anterior [3]. La simulación de la cadera y la rodilla como una superficie esférica permite cumplir con los movimientos de flexión/extensión, abducción/aducción y rotación interna y externa. El tobillo posee dos ejes de giro, que suponen dos giros tipo bisagra. Debido a la complejidad de la posición de estos giros, se modela la articulación como una superficie esférica. 4.2. MODELO PIG El modelo Plug in Gait está basado en el modelo Newington [10] y cuenta con el menor número de marcadores posibles, de forma que quede definido el modelo con la menor perturbación para el sujeto. El modelo Plug in Gait necesita los siguientes marcadores en el tren inferior para la simulación del cuerpo: Cadera: LASI, RASI, LPSI, RPSI Piernas: RTHI, RKNE, RTIB, LTHI, LKNE, LTIB Pies: RANK, RTOE, RHEE, LANK, LTHE, LHEE 24 La primera letra R o L de cada marcador se corresponde con derecha e izquierda respectivamente Figura 15. Modelo PiG [19] Para llevar a cabo la reconstrucción del modelo del tren inferior, son necesarios también los siguientes datos: Masa corporal. Altura. Longitud de las piernas. Ancho de la rodillas. Ancho del tobillos. A continuación detallaremos el protocolo de reconstrucción PiG de Vicon [18], definiendo los sistemas de coordenadas y sus orientaciones. Se toma como eje X en color rojo, Y en verde y Z en azul en las representaciones. Se toma el eje Z como vertical en la reconstrucción de la cadera, de forma que el sujeto se desplaza en el plano XY. Pelvis La pelvis es el primer segmento en ser creado en la reconstrucción [18]. En primer lugar se crea el sistema de coordenadas de la pelvis a partir de los marcadores LASI, RASI, LPSI, RPSI en la captura estática, definido en la figura siguiente. 25 Figura 16. Reconstrucción de la pelvis PiG [18] Calculo Dirección Origen 1º eje definido Y 2º eje definido Z 3º eje definido X Lateral, de dcha a izq. Ortogonal al plano definido por Vertical, hacia arriba LASI, RASI, LPSI, RPSI Producto vectorial entre los vectores unitarios Y y Z Tabla 1. Sistema de referencia de la cadera Para el cálculo del centro de la cadera se utiliza el modelo de Newington [10]. Se emplea una aproximación por regresión para encontrar un vector que conecte el origen de la pelvis con la cadera. Como primera aproximación a la situación de los centros de las caderas, se aplica el método predictivo [10]. Mediante la aproximación de una regresión se busca el vector que conecta el origen del sistema de coordenadas de la pelvis con los centros de las caderas. Dicha regresión se basa en la distancia “inter-ASIS” y la longitud de la pierna. Figura 17. Método predictivo [10] 26 Las coordenadas locales del centro de la cadera izquierda en sistema de coordenadas de la pelvis son: Siendo: Una vez los centros de la cadera se han situado, el sistema de coordenadas local de la rodilla puede situarse. La dirección de los ejes permanece constante respecto al sistema ya definido, pero el origen se desplaza hasta el punto medio de los centro de las caderas. Figura 18. Reconstrucción de la pelvis, PiG [18] Calculo Dirección Origen 1º eje definido Y 2º eje definido Z 3º eje definido X Lateral, de dcha a izq. Ortogonal al plano definido por LASI, RASI, LPSI, RPSI Producto vectorial entre los vectores unitarios Y y Z Vertical, hacia arriba Tabla 2. Sistema de referencia local final de la pelvis 27 Muslo Definidos los centros de las caderas, el siguiente paso es la determinación de los centros de de las rodillas para poder definir por completo los segmentos de los muslos. La ubicación de los centros de articulación de las rodillas se establece en la captura estática: Figura 19. Reconstrucción del muslo, PiG [18] El centro de la rodilla, KJC, se encuentra a una distancia KO (KO=ancho de la rodilla + diámetro del marcador/2) del marcador KNE en el plano formado por los marcadores KNE, THI y HJC y en la dirección perpendicular al vector que une HJC con KJC, como se aprecia en la Figura 19. Para la definición del sistema de coordenadas del muslo, se siguen las siguientes pautas: Cálculo Dirección Origen 1º eje definido Z 2º eje definido X 3º eje definido Y Vertical, ascendente Ortogonal al plano definido por HJC, KJC,THI Producto vectorial entre los vectores unitarios Z y X Anterior Lateral, de dcha a izq. Tabla 3. Sistema de referencia local del muslo [18] Pierna El centro del tobillo, AJC, se determina en la captura estática a partir de los marcadores ANK y del centro de la rodilla KJC. Definiendo el plano formado por AJC, TIB y KJC, en la perpendicular a la línea que une KJC y AJC y a una distancia AO, se encuentra el centro del tobillo AJC. Siendo AO=ancho del tobillo + diámetro del marcador/2. 28 Figura 20. Reconstrucción de la pierna, PiG [18] Definiendo el sistema de coordenadas local de la pierna: Calculo Dirección Origen 1º eje definido Z 2º eje definido X 3º eje definido Y Vertical, ascendente Ortogonal al plano definido por KJC, AJC, TIB Producto vectorial entre los vectores unitarios Z y X Anterior Lateral, de dcha a izq. Tabla 4. Sistema de referencia local de la pierna Pie Al igual que los segmentos anteriores, el tobillo queda definido mediante marcadores reales y virtuales. En este caso se utilizan los marcadores HEE y TOE y el centro del tobillo AJC definido anteriormente. Dicha reconstrucción se aprecia en la Figura 21: Figura 21. Reconstrucción del pie, PiG [18] 29 Calculo Dirección Origen 1º eje definido Z 2º eje definido Y 3º eje definido X Posterior Ortogonal al plano definido por KJC, AJC, HEE Producto vectorial entre los vectores unitarios Y y Z Lateral, de dcha a izq. Vertical, ascendente Tabla 5. Sistema de referencia local del pie 4.3. MODIFICACIONES AL PIG El modelo PiG puede acarrear errores al realizar la reconstrucción que resultan insalvables una vez se ha realizado la captura del movimiento. Parte de estos errores se deben a la sensibilidad del modelo a pequeñas desviaciones en la colocación de los marcadores en el sujeto, en especial en el muslo. Estas desviaciones pueden suponer grandes variaciones en la situación y orientación de los planos que ayudan a definir los centros de las rodillas. Se tiene como resultado grandes diferencias en las coordenadas de los centro de las articulaciones y cambios en las orientaciones de los ejes. Estos errores no son visibles hasta el procesado de los datos, de forma que no es posible la modificación en la colocación del marcador y repetición de la medida. Por otro lado, los centros de los tobillos se ven igualmente afectados, ya que para su definición se parte de los centros de las rodillas, ya erróneos. Se tiene finalmente un modelo poco fiable, dando lugar a errores importantes en la cinemática del modelo, especialmente en la aducción. En este proyecto se estudian otras modificaciones a este modelo cuyo objetivo es solventar estos problemas de forma que se afine la medida y se obtengan resultados más precisos. En primer lugar veremos el modelo incluyendo el Knee Alignment Device, KAD, diseñado por Vicon Motion System®. Este sistema se ayuda de un dispositivo que pretende ajustar con mayor precisión la posición de la rodilla. En segundo lugar, introduciremos el modelo Plug in Gait modificado. Este modelo no sólo pretende mejorar la posición del centro de rotación de la rodilla, sino que incluye el mismo tratamiento al tobillo. Por último, se incluye el modelo de optimización global aplicado en el proceso y el método funcional para la determinación de la posición del centro de rotación de la cadera. El método de optimización global, GOM, mide el error cometido en la distribución de la toma de datos y devuelve una compensación al error cometido. Por otro lado el método funcional permite una mejor definición de los centros de las caderas, de forma que se obtenga un modelo más preciso. 30 4.3.1. KAD La colocación de la mayoría de los marcadores coincide con puntos estratégicos y fácilmente distinguibles del cuerpo humano. Sin embargo, los marcadores de medio muslo, TIB, pueden resultar difíciles de colocar correctamente y el error cometido es únicamente visible al final del posprocesado. Pequeñas desviaciones en la colocación de este marcador pueden resultar en grandes errores en la determinación del centro de la rodilla, de hasta 3cm, e incluso cambiando la orientación de los ejes del segmento [3]. Figura 22. Centros de rotación de la rodilla, Nexus Software El KAD es un dispositivo guía que se acopla mediante un muelle a la rodilla del sujeto durante la captura estática, Figura 23. Permite una mejor definición de los ejes que ayudan a definir el centro de la rodilla sin que afecte de forma tan crítica las posibles pequeñas variaciones en la posición del marcador del muslo THI. Debe considerarse que el eje del KAD debe coincidir con el eje de flexión de la rodilla durante su colocación. Figura 23. Dispositivo KAD 31 Como se aprecia en la Figura 24, el protocolo con KAD crea un marcador virtual KNE equidistante de los marcadores del KAD. La dirección de la línea conectando la posición del marcador virtual con el marcador KAX perpendicular del KAD es el eje de flexión de la rodilla. A continuación se crea el plano frontal con los marcadores de la rodilla KNE y KAX y el centro de la cadera HJC. Seguidamente se crea el plano frontal basado en el marcador del muslo THI. Por último se calcula la rotación del eje a partir de los dos planos frontales, como se aprecia en la Figura 24. Figura 24. Sistema de alineación KAD Figura 25. Rotación de la rodilla con el KAD Esta rotación aplicada el segmento del muslo, debe considerarse también a la hora de definir la pierna. Se tiene entonces una rotación aplicada a todo el conjunto como se ve en la Figura 25. 32 Figura 26. Rotación del tobillo Estos ejes deben considerarse a la hora de definir los sistemas de referencia del modelo PiG. De esta forma se consigue mayor consistencia en el modelo. 4.3.2. MODELO PIGMOD Para solventar los problemas producidos al determinar los centros de las rodillas y tobillos, en [3] se modificó el modelo PiG, añadiendo marcadores que permitan una mejor determinación de esos centros y de sus sistemas de referencia y por tanto disminuir ese error. El objetivo de este modelo consistía en mejorar el PiG de forma similar al KAD, pero sin necesidad de ningún dispositivo externo. El PiGmod consigue mejorar la ubicación de los centros de las rodillas y tobillos así como las orientaciones de sus ejes, de forma que consigue un modelo más eficiente que con la utilización única del KAD. Como valor añadido, los marcadores adicionales son necesarios únicamente durante la captura estática, de forma que durante las capturas de la marcha son eliminados y no perturban al sujeto. Esta última característica es especialmente importante al realizar estos estudios sobre niños, ya que es más difícil la colaboración de niños y la adquisición de capturas válidas si se utilizan excesivos marcadores. El modelo Plug in Gait modificado consta básicamente de los mismos marcadores que el PiG normal, añadiendo a la medida cuatro marcadores de apoyo para el caso del treninferior. Necesitamos entonces los siguientes marcadores: Cadera: LASI, RASI, LPSI, RPSI Piernas: RTHI, RKNE,RKNI, RTIB, LTHI, LKNE, LKNI, LTIB Pies: RANK,RINK, RTOE, RHEE, LANK, LINK, LTHE, LHEE 33 Figura 27. Modelo PiGmod A continuación se detalla las modificaciones al modelo PiG. Las definiciones de los sistemas de coordenadas y sus orientaciones se mantienen, modificándose únicamente la determinación de los centros de las articulaciones de las rodillas y los tobillos [3]. Ambos procesos para la pelvis y el pie se mantienen constantes, incluyendo sus orientaciones y los centros de las caderas. Se debe por tanto reconstruir únicamente los muslos y piernas del modelo. Muslo Para la correcta definición de la rodilla se utiliza un marcador extra KNI, colocado en el epicóndilo medio de la misma durante la captura estática. El eje de la flexión queda definido por los marcadores KNE y KNI, y el centro de la rodilla, KJC, es el punto central contenido en ese vector. 34 Figura 28. Reconstrucción del muslo, PiGmod Para la definición del sistema de coordenadas, se sustituye el plano formado por KJC, HJC y THI, por el plano formado por KNE, KNI, HJC. El ángulo formado corrige la posición del muslo y es calculado durante la captura estática y posteriormente aplicado durante la marcha. Este ángulo también puede ser calculado durante la marcha a partir de KNE y KNI, pero a veces el marcador interior KNI debe ser retirado ya que obstaculiza la marcha normal del sujeto. Calculo Dirección Origen 1º eje definido Z 2º eje definido X 3º eje definido Y Vertical, ascendente Ortogonal al plano definido por HJC, KNE, KNI Producto vectorial entre los vectores unitarios Z y X Anterior Lateral, de dcha a izq. Tabla 6. Sistema de referencia del muslo Pierna Al igual que en el caso anterior, el centro de rotación del tobillo, AJC, se determina en la captura estática a partir de los marcadores ANK y INK, como el punto central sobre el vector que une ambos marcadores. 35 Figura 29. Reconstrucción de la pierna, PiGmod Definiendo el sistema de coordenadas local de la pierna de la misma manera: Calculo Origen Dirección AJC 1º eje definido Z AJC -> KJC Vertical, ascendente 2º eje definido X Anterior 3º eje definido Y Ortogonal al plano definido por KJC, AJC, KNI Producto vectorial entre los vectores unitarios Z y X Tabla 7. Sistema de referencia de la pierna 36 Lateral, de dcha a izq. 4.4. MÉTODO DE OPTIMIZACIÓN GLOBAL Este método sirve para estimar la posición y orientación de los segmentos a partir de los marcadores resolviendo un problema de optimización donde se minimiza la distancia entre la posición del marcador determinada por el modelo y la posición del marcador obtenida en la captura de movimiento. Permite medir el error en la distribución de toma de datos y devolver una compensación al error mecánico cometido, por ello puede considerarse como una optimización global del sistema. Para tratar los elementos individuales, son necesarios una serie de parámetros específicos (coordenadas locales de los marcadores definidos en el modelo), determinados en la captura estática del sujeto y que se mantienen constantes. Los valores residuales de los errores de cada marcador y de cada segmento se calculan en cada instante y para cada uno de ellos. Para cada segmento se llega a su error : Siendo el residual promedio en un segmento. También es necesario definir los pesos asignados a cada segmento para representar los errores arrastrados por los marcadores de dicho segmento, ya que algunos segmentos presentan errores mayores que otros. Los errores cometidos en el muslo son bastante mayores a los cometidos en la pierna o el pie por ejemplo, de ahí que los pesos asignados al muslo sean mucho menores a los de los otros dos segmentos. De esta forma se consiguen reducir los errores y que todo el sistema sea fiable. Siendo el marcador segmento se define como: del segmento con número total de marcadores. El peso del Se tiene un problema de optimización no lineal que debe ser implementado en Matlab®: Siendo: la matriz de giro del sistema, el vector de posición local del segmento, las coordenadas locales de los marcadores definidos en el modelo, el peso del error del segmento , el número de marcadores del segmento y las restricciones cinemáticas del modelo. En este proyecto se aplica el método de optimización global sobre el modelo PiGmod. De esta forma, se comparan los resultados en posición, velocidad y aceleración del problema 37 cinemático inverso resuelto con el modelo PiGmod, con la aplicación del GOM (apartado 5.3.2) y sin ningún método de optimización (apartado 5.3.1). 4.5. MÉTODO FUNCIONAL PARA LA DETERMINACIÓN DE LA CADERA Este método calcula el centro de la esfera que mejor define la trayectoria de los marcadores situados en el muslo durante una serie de rotaciones de rodilla. Para poder realizar este método, se colocaban tres marcadores sobre el muslo y se pedía a los sujetos que realizaran una serie de movimientos circulares con cada pierna. El centro de rotación de la cadera se define como un punto P cuyas coordenadas son s’PPEL, que son las incógnitas del problema [3]. Su definición de la posición global queda como: rP = rPEL + APEL s’PPEL Figura 30. Método funcional [3] Cada marcador j pegado al muslo queda definido por su posición global rj y se considera a una distancia radj del punto P. Si suponemos un movimiento esférico perfecto del muslo respecto a la cadera, cada marcador debería quedar a una distancia constante del punto P. Es decir a cada instante se debe satisfacer: (ri + Ai s’PPEL - rj)2 – radj2 = 0 Siendo: ri el vector de posición global del centro de la cadera, Ai la matriz de giro, s’PPEL vector de posición local del centro de la cadera, rj vector de posición global del marcador j y radj radio de giro del marcador j resptecto al punto P. 38 Para la correcta determinación del centro de la cadera se aplica un método de minimización de la función cuadrática anterior, partiendo de los datos obtenidos por el método predictivo: Siendo el vector de posición del marcador M1,2 ó 3 . De esta forma se consigue determinar el centro de rotación de la cadera con menor error, como es el caso de tan solo 13 mm de posible error en un adulto varón [15]. 39 40