La carrera de los redondos - UAM-I
Anuncio

La carrera de los redondos
Angel Manzur Guzm¶an
Departamento de F¶³sica, CBI, UAM-I
e-mail: amg@xanum.uam.mx
Recibido: 11 de octubre de 2004.
Aceptado: 9 de ediciembre de 2004.
ta recientemente [1,2] son: planteamiento y an¶alisis cualitativo, an¶
alisis matem¶
atico, e interpretaci¶on
f¶³sica de la soluci¶
on. Cada uno de estos pasos consiste de varias partes; por ejemplo, casos particulares, casos l¶³mite y aplicaciones pueden ser analizados en el u
¶ltimo paso principal.
Introducci¶
on
El estudio de la f¶³sica es necesario y obligatorio para estudiantes de las carreras de ciencias b¶
asicas
y de ingenier¶³a, lo cual exige dedicaci¶on para lograr dominar los conceptos y las t¶ecnicas requeridas para ser competente en esta materia. Para entender a fondo los conceptos, el estudiante debe aplicarlos en la resoluci¶on de problemas. A su vez, para resolver los problemas, debe tener una adecuada comprensi¶on de los conceptos. As¶³, el estudiante debe avanzar por un doble camino: comprensi¶
on
de los conceptos y resoluci¶on de problemas. La manera en que se puede saber con certeza que se entienden los conceptos es a trav¶es de su aplicaci¶
on correcta en la resoluci¶on de problemas.
Aqu¶³ se presenta la obtenci¶
on de la soluci¶
on de un
problema de mec¶
anica elemental donde se han seguido los pasos principales propuestos. La intenci¶
on en este art¶³culo es ilustrar con un ejemplo el
proceso de c¶
omo resolver un problema de mec¶anica elemental y, principalmente, de c¶
omo interpretar
la soluci¶
on.
Problema [3,4]
Un plano inclinado forma un ¶
angulo µ con la horizontal. En su parte superior se encuentran varios cuerpos de densidad de masa uniforme, pero cada uno
tiene diferente geometr¶³a: esfera s¶
olida, esfera hueca, cilindro s¶
olido o disco y cilindro hueco o aro.
Los cuerpos son soltados simult¶
aneamente y ruedan sin resbalar, >cu¶
al llega primero a la parte inferior del plano?
Con la resoluci¶on de problemas se busca que el estudiante identi¯que los temas de f¶³sica y matem¶
aticas
que no maneja y a los cuales debe dedicar m¶
as trabajo; que interprete la soluci¶on algebraica y la utilice para predecir resultados; que sea capaz de calcular el efecto producido en el resultado cuando var¶³an
los valores de algunos par¶ametros, y que pueda generalizar las condiciones de un problema para valorar
otros efectos y resultados. En general, se busca desarrollar habilidades. No basta con encontrar la respuesta al problema planteado, sino que al interpretar el resultado se puede comprender mucho m¶
as sobre la f¶³sica involucrada y se puede lograr una comprensi¶
on plena de la materia.
Planteamiento y an¶
alisis cualitativo
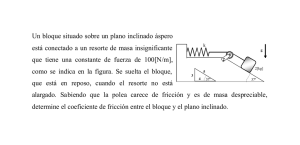
En la ¯gura 1 (p¶
ag. 2) se ilustran los cuerpos que
van a empezar a rodar sobre el plano inclinado.
Debido a que la caracter¶³stica principal que distingue a estos cuerpos es la distinta distribuci¶on de
la masa, es de esperarse que el momento de inercia (I) (tambi¶en llamado inercia de rotaci¶on) tenga un efecto importante en la velocidad con que
cada uno llega a la parte inferior del plano inclinado, y tambi¶en en la aceleraci¶
on con que cada uno se traslada. En su movimiento de traslaci¶
on cada uno de estos cuerpos rueda respecto a un
eje horizontal, que pasa por su centro de masa y
que es perpendicular a la direcci¶
on del movimiento
traslacional.
Las habilidades que se requieren para resolver problemas se adquieren resolviendo problemas. Debido
a que los problemas de f¶³sica pueden parecer dif¶³ciles, conviene tener una gu¶³a que indique c¶
omo proceder. La gu¶³a indica los pasos principales, as¶³ como
sus partes relevantes, y el orden en que deben llevarse a cabo; proporciona elementos que sirven para veri¯car si los resultados intermedios y ¯nales son correctos. Los pasos principales de una gu¶³a propues-
Para responder a la pregunta enunciada en el problema se pueden seguir varios caminos diferentes: calcular la velocidad de traslaci¶
on que el cuerpo tiene al
63
64
ContactoS 55, 63{66 (2005)
Figura 1. Una esfera s¶
olida, una esfera hueca, un disco y un cilindro hueco est¶
an listos para empezar a rodar.
llegar a la parte inferior del plano inclinado, y para ello conviene usar la conservaci¶on de la energ¶³a
mec¶
anica; o calcular la aceleraci¶on con que el cuerpo
se traslada por el plano inclinado, y para ello conviene usar la din¶
amica producida por las fuerzas y torcas. El cuerpo que llega primero es el que tiene mayor velocidad o mayor aceleraci¶on. Tambi¶en se puede responder calculando el tiempo que tarda el cuerpo en su carrera a lo largo del plano inclinado. Resolvamos el problema mediante estos tres caminos.
mgh =
mv 2
Iv 2
+
;
2
2R2
(1)
de aqu¶³ se obtiene que la velocidad de traslaci¶
on del
centro de masa es
v=
r
2gh
;
1+k
(2)
I
donde se ha de¯nido k = mR
ametro
2 como el par¶
adimensional que identi¯ca al cuerpo.
An¶
alisis matem¶
atico
Energ¶³a. Llamaremos gen¶ericamente como \el cuerpo" a cualquiera de ellos. Cuando inicialmente el
cuerpo est¶
a en reposo a una altura h, toda su energ¶³a
mec¶
anica es potencial. Esta es igual a mgh, si se toma como energ¶³a potencial cero el nivel en que el
cuerpo se separa del plano, que es donde su centro de masa est¶a por encima de la mesa a una altura
igual a su radio (R) (ver ¯gura 2). En cambio, cuando el cuerpo pierde contacto con el plano inclinado toda su energ¶³a mec¶anica es cin¶etica, la cual consta de dos partes: una de traslaci¶on y una de rotaci¶
on.
La energ¶³a cin¶etica de traslaci¶on del centro de ma2
, y la energ¶³a cin¶etica de rotaci¶on (respecsa es mv
2
2
to al eje) es I!2 , donde v es la velocidad de traslaci¶
on y ! es la velocidad angular. Usaremos estos mismos s¶³mbolos de las velocidades para indicar sus valores cuando el cuerpo llega a la parte inferior del
plano inclinado. La condici¶on de que el cuerpo rueda sin resbalar se escribe como v = !R, de tal maIv2
nera que la energ¶³a de rotaci¶on es 2R
2 . Al igualar la
energ¶³a mec¶
anica en la parte superior con la energ¶³a
en la parte inferior, se obtiene que
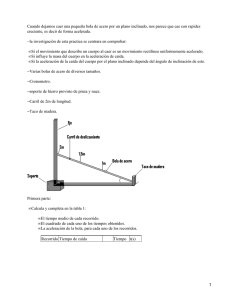
Din¶
amica. Las fuerzas que act¶
uan sobre el cuerpo
son el peso mg, la fuerza normal (N ) que ejerce el
plano inclinado y la fuerza de fricci¶
on est¶
atica (f ),
como se indica en la ¯gura 2.
Figura 2. Fuerzas que act¶
uan sobre el cuerpo que rueda.
Escogemos un sistema de referencia cuyos ejes est¶en
orientados de tal manera que uno sea perpendicular al plano inclinado y el otro apunte hacia abajo y paralelo al plano inclinado. La ecuaci¶
on del movimiento de traslaci¶
on del centro de masa, en la direcci¶
on perpendicular al plano inclinado, es
La carrera de los redondos.
Angel Manzur Guzm¶
an.
N ¡ mgcosµ = 0;
(3)
y en la direcci¶on paralela al plano inclinado es
mg sen µ ¡ f = ma:
(4)
La fuerza de fricci¶on es la u
¶nica que produce torca
respecto al eje de giro. Por tanto, la ecuaci¶
on de
movimiento para la rotaci¶on respecto al eje es
f R = I®
Ia
R
(6)
Sustituyendo este valor de f en la ecuaci¶
on (4), se
obtiene que la aceleraci¶on del centro de masa es
a=
g sen µ
;
1+k
donde nuevamente se us¶o k =
(7)
I
.
mR2
Tiempo. Como ya calculamos la aceleraci¶on del cuerpo paralela al plano inclinado y result¶o ser una cantidad constante, entonces podemos usar las ecuaciones
cinem¶
aticas para el movimiento uniformemente acelerado. Llamemos z a la posici¶on del centro de masa medida a lo largo de un eje paralelo al plano inclinado (separado del plano una distancia igual al radio R) desde la parte superior del plano y positiva hacia abajo, y l a la longitud del plano inclinado. La posici¶on como funci¶on del tiempo es
z=
at2
:
2
(8)
A partir de esta ecuaci¶on podemos conocer el tiempo T en que el cuerpo llega a la posici¶on z = l; el resultado es
T =
r
2l
;
a
al sustituir el valor de a dado por (7), se obtiene que
T=
s
Tambi¶en se puede calcular T a partir de la ecuaci¶
on cinem¶
atica para la velocidad. Derivando la posici¶
on z (ecuaci¶
on (8)) respecto al tiempo se obtiene la velocidad: vz = at. Esta velocidad es positiva siempre, pues el cuerpo se mueve en la direcci¶
on en que z crece; en el tiempo T su magnitud est¶
a dada por la f¶
ormula (2). Usando (2) y (7)
se obtiene
v
T= =
a
(5)
La condici¶
on de rodamiento sin deslizamiento, en
t¶erminos de las aceleraciones lineal (a) y angular (®),
es a = ®R; de modo que la ecuaci¶on para el movimiento rotacional es
fR =
65
2l(1 + k)
:
g sen µ
(9)
s
2h(1 + k)
:
g sen2 µ
Este resultado es el mismo que se obtuvo en (9) pues
h = l sen µ.
Interpretaci¶
on f¶³sica de la soluci¶
on
Las expresiones para la velocidad (dada en (2)) y para la aceleraci¶
on (dada en (7)) son v¶
alidas para cualesquiera de los cuerpos. El cuerpo que llega primero a la parte inferior del plano inclinado es aqu¶el que
I
tiene el valor de k = mR
as peque~
no, pues es en
2 m¶
ese caso que se obtiene el valor mayor tanto para
la velocidad como para la aceleraci¶
on. Este resultado tambi¶en lo predice la expresi¶
on (9), donde el menor tiempo de la carrera lo logra el cuerpo que tenga
el valor m¶
as peque~
no de k. Para saber de cu¶al cuerpo se trata, se debe conocer el valor de I. En la tabla
siguiente aparecen los valores de k para los distintos
cuerpos.
cuerpo
esfera s¶
olida
cilindro s¶
olido o disco
esfera hueca o cascar¶
on esf¶erico
cilindro hueco o aro
k=
I
mR2
2
5
1
2
2
3
1
Seg¶
un el valor de k registrado en la tabla, la esfera s¶
olida gana la carrera pues llega primero a la
base del plano inclinado, le sigue el disco, despu¶es
el cascar¶
on esf¶erico y el cilindro hueco o aro llega
en u
¶ltimo lugar. Es interesante hacer notar que este resultado, representado por las f¶
ormulas (2), (7)
o (9), no depende de las dimensiones de los objetos, ni de la masa; s¶
olo depende de la forma en
que su masa est¶
a distribuida, es decir, del momento
de inercia.
Es interesante observar que la energ¶³a cin¶etica de
Iv2
rotaci¶
on en la parte inferior del plano inclinado 2R
2,
kmv 2
expresada como 2 (ver la ecuaci¶
on (1)), tiene el
mismo valor que la energ¶³a cin¶etica de traslaci¶on s¶olo
en el caso del aro o cilindro hueco pues k = 1 para
este cuerpo; en cambio, para cualquiera de los otros
66
ContactoS 55, 63{66 (2005)
3 cuerpos, la energ¶³a cin¶etica de rotaci¶on es menor
que la energ¶³a cin¶etica de traslaci¶on, pues para ellos
k < 1.
2. A. Manzur. Pasos para la resoluci¶
on de problemas. 2. Revista Mexicana de F¶³sica, 47(2), 175,
2001.
La fuerza de fricci¶on es la causante de que exista el
movimiento de rodamiento. Estamos a un paso de
poder calcularla. Sustituyendo en la ecuaci¶on (6) el
valor de la aceleraci¶on dado en (7), se obtiene para
la fuerza de fricci¶on la expresi¶on siguiente
3. R. Resnick, D. Halliday y K. S. Krane. F¶³sica. Volumen 1, quinta edici¶
on en ingl¶es (cuarta edici¶
on en espa~
nol). CECSA, M¶exico, 2002.
Problema resuelto 9-11, pregunta 9-27, ejercicio 9-25 y problema resuelto 12-8.
f=
k
mg sen µ:
1+k
Nuevamente aqu¶³ se observa el importante efecto que
tiene el momento de inercia. No todos los cuerpos
sienten la misma fuerza de fricci¶on, es decir, la fuerza de fricci¶
on depende de la geometr¶³a del cuerpo rodante. Esta caracter¶³stica de la fuerza de fricci¶on, para el caso de cuerpos que rotan, tambi¶en se discute en la referencia 5.
Bibliograf¶³a
1. A. Manzur. Pasos para la resoluci¶on de problemas. Contactos, No. 38, 45, 2000.
4. M. Alonso y E. J. Finn. F¶³sica, volumen I: mec¶
anica. Addison-Wesley Iberoamericana, M¶exico, 1986. Ejemplo 10.9.
5. A. Manzur. Fuerza tangencial de contacto en
movimiento de rodamiento. Revista Mexicana
de F¶³sica, 38, 478, 1992.
cs