las redes rtk y la ingeniería civil. el proyecto iberef
Anuncio

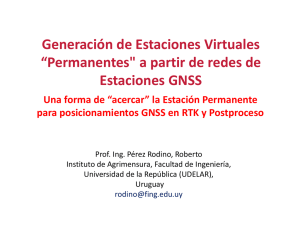
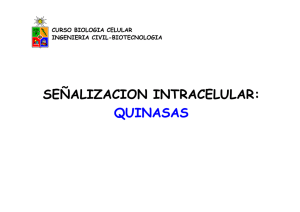
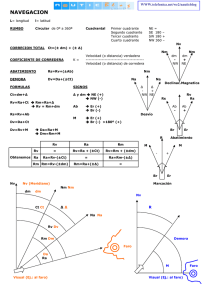
LAS REDES RTK Y LA INGENIERÍA CIVIL. EL PROYECTO IBEREF A. Seco (P)*, J. Peñafiel**, F. Ramírez*, B. García*, M. González de Audícana*, R. García* *Dpto. De Proyectos e Ingeniería Rural de la Universidad Pública de Navarra. **Leica Geosystems, S.A. Andres.seco@unavarra.es RESUMEN Dentro del amplio espectro de los usuarios G.P.S. aquellos con aplicación en ingeniería civil suponen un segmento porcentualmente pequeño pero de gran peso en el sector de los fabricantes de equipos ya que son los usuarios que requieren más altas precisiones y trabajan en tiempo real, lo cual supone la utilización de equipos muy avanzados y caros. El método de medición G.P.S. más habitualmente empleado por este tipo de usuarios es el RTK. Frente al RTK tradicional en los últimos tiempos se han desarrollado las redes RTK que permiten eliminar gran parte de los inconvenientes del RTK tradicional mejorando aspectos tan importantes como la exactitud, fiabilidad, disponibilidad y rendimiento del sistema. En España en la actualidad se está implantando la red IBEREF que pretende ser la primera red RTK nacional a gran escala. Esta red permitirá alcanzar precisiones de entre 1 y 3 cm en cualquier zona del territorio donde se encuentre implantada y revolucionará los actuales métodos de trabajo G.P.S. en obra. INTRODUCCIÓN Los usuarios G.P.S. dentro del campo de la ingeniería civil representan un segmento de usuarios que suponen en la actualidad en torno al 5% del total. El desarrollo de nuevas aplicaciones de esta tecnología se espera que reduzca el peso relativo de este segmento de usuarios hasta situarlo en 2005 en torno al 1% del total [Seco, 2002]. A pesar de esta disminución porcentual sobre el mercado total del G.P.S. este segmento de usuarios está experimentando un notable desarrollo gracias en gran medida al desarrollo de los algoritmos que permiten las observaciones en tiempo real. Esto ha permitido que el G.P.S. pase a ser competitivo con la topografía clásica que hasta hace poco era la única fuente de datos topográficos disponible en el campo de la ingeniería civil. El segmento de usuarios G.P.S. en ingeniería civil presenta una serie de características que lo diferencian del resto de usuarios: 1. Número de usuarios reducido. 2. Se requieren altas precisiones (orden centimétrico). 226 3. Necesidad de trabajar en tiempo real. A pesar de suponer un porcentaje pequeño sobre el número de usuarios totales, este segmento tiene un gran peso económico tanto para las empresas fabricantes de equipos, ya que se requieren aparatos muy costosos, como para las empresas usuarias que emplean estos instrumentos en un sector económico que mueve grandes sumas de dinero, como es la construcción. En la actualidad los estándares de precisión que se manejan en este campo de la actividad humana son los obtenibles con las técnicas de topografía clásica. Estas técnicas topográficas permiten, con los métodos e instrumentación actualmente disponibles alcanzar precisiones centimétricas tanto en planimetría como en altimetría. El requisito de las altas precisiones requeridas condiciona aspectos tan importantes como los métodos de observación G.P.S. empleados, el número de equipos necesarios, etc. FIGURA 1. Métodos de observación G.P.S. y precisiones alcanzables [Peyret, 2000]. Como se puede observar en la figura 1, las precisiones alcanzables en mediciones G.P.S. alcanzan un rango desde los 200 m hasta 1 mm, en función del método de observación empleado. Dadas las precisiones requeridas en ingeniería civil se puede ver que los únicos métodos con aplicación en este campo son los métodos diferenciales basados en la medida de la fase de las señales portadoras. La necesidad de trabajar en tiempo real añade el requisito de disponer de enlace entre los receptores. El método más empleado en este tipo de aplicaciones es el cinemático en tiempo real, más conocido por sus siglas en inglés RTK. EL MÉTODO RTK CLÁSICO El modo cinemático se basa en inicializar el equipo móvil con la resolución de las ambigüedades para luego desplazarse a los puntos de medición que son observados en periodos cortos, habitualmente de unos pocos segundos. Las 227 precisiones nominales de este método se encuentran entre los 1 y 3 cm+1 ppm de E.C.M. en planta y entre los 2 y 4 cm+1 ppm de E.C.M. en altimetría (Leica, 1998), suficiente para la mayoría de las fases de ejecución de una obra. Los mayores inconvenientes de este método son: 1. Durante todo el tiempo que dure la medición, el receptor tiene que mantener permanentemente el contacto con un mínimo de 4 satélites. La pérdida de contacto con los mismos produce la pérdida de las ambigüedades en cuyo caso se deben de volver a determinar antes de continuar con las mediciones, es lo que se denomina iniciar una nueva cadena. 2. La necesidad de disponer de un receptor fijo en un punto de la red geodésica local mientras se trabaja lo que hace necesaria una inversión mayor en equipos. 3. La necesidad de que el receptor móvil reciba en todo momento las correcciones diferenciales emitidas por el receptor fijo. En la actualidad esto se resuelve mediante el empleo de un radioenlace. En condiciones de medición normales este radioenlace tiene un alcance máximo de entre 3 y 7 Km en función de las características de la zona de trabajo, lo cual implica la necesidad de desplazar el receptor fijo a puntos fijos en las zonas de trabajo para garantizar la cobertura de radio. FUENTES DE ERROR EN EL POSICIONAMIENTO RTK De entre todas las fuentes de error propias de las mediciones G.P.S. comentaremos aquellas que tienen especial interés desde el punto de vista de las observaciones RTK [Seco, 2001]: 1. retraso ionosférico.La señal G.P.S. se propaga en el vacío a la velocidad de la luz (c). Sin embargo en la atmósfera su comportamiento es distinto, sufriendo refracción y dispersión. El retraso que sufre la señal G.P.S. es debido en gran medida a la presencia de electrones libres en la atmósfera, TEC (Total Electron Content). Éstos son especialmente abundantes en la ionosfera, entre los 50 y los 1.200 km de altura, por lo que este efecto se asigna en su totalidad a esta franja de la atmósfera [Mansilla et al, 1990]. Esto provoca un retraso de la señal que se traduce en una determinación errónea de la distancia satélite-receptor y por tanto un error de posición. 2. Retraso troposférico. Las señales electromagnéticas de la banda L como es el caso de las señales G.P.S. en la troposfera (hasta los 50 Km de altura), sufren un efecto de refracción. Este efecto depende de factores atmosféricos como la presión, la temperatura y la humedad y varía según la altitud del observador [Capdevila, 1995]. 3. Diferencias en la geometría de la constelación. Debido a la distancia entre receptores, la posición relativa del receptor con respecto de la constelación observada no es exactamente la misma en el fijo que en el móvil. Esto puede inducir que las correcciones diferenciales calculadas en el receptor fijo no sean estrictamente correctas para la posición del receptor móvil. 4. Efecto multisenda. También conocido como efecto multicamino o multipath. Este error se produce cuando la señal del satélite llega al receptor por más de un camino. Este efecto se suele producir cuando el receptor se encuentra cerca de superficies muy reflectivas como las estructuras metálicas. En estos casos el receptor 228 recibe la señal directa del satélite y un lapso de tiempo después la señal reflejada. El receptor interpreta esto como un ruido en la señal y puede inducir un cálculo erróneo de las coordenadas del punto. 5. Difracción de la señal G.P.S. Este efecto se produce cuando el receptor recibe señales de satélites que se encuentran muy bajos sobre el horizonte. Estas señales atraviesan grandes distancias a través de la atmósfera sufriendo este efecto [Bétaille, 2002]. 6. Fallos de radioenlace. El radio de alcance del radioenlace puede verse alterado por la topografía de la zona, la presencia de vegetación, la cercanía de líneas eléctricas, etc. la pérdida del radioenlace imposibilita el trabajo en tiempo real y obliga a la elección de emplazamientos para el receptor fijo con buena cobertura en la zona de trabajo. El RTK al igual que los otros métodos de observación G.P.S. diferencial se basa en la asunción de que los errores que afectan al receptor fijo y al móvil son los mismos. Esta suposición sólo se puede considerar como válida cuando la distancia entre ambos equipos es lo suficientemente corta. En este caso los receptores estarán recibiendo los mismos satélites, con la misma geometría y las fuentes de error podrán ser consideradas al menos de la misma magnitud en ambos equipos. A medida que crece la distancia entre ambos receptores esta suposición es cada vez menos cierta, lo que se traduce en disminuciones de la precisión alcanzable. La distancia habitualmente considerada como límite para esta suposición se suele establecer en los 20 Km. Por encima de esta distancia se recomienda no trabajar y en caso de hacerlo es preferible recurrir a tiempos de observación largos (por encima de los 30 minutos). LAS REDES RTK Una alternativa de gran futuro para el método RTK clásico son las redes RTK. El concepto de las redes RTK se puede representar gráficamente de manera intuitiva. Supóngase una zona de trabajo en la cual disponemos de una red geodésica como se muestra en la figura 2: ZONA DE TRABAJO FIGURA 2. Red geodésica y zona de trabajo. 229 Si el tamaño de dicha zona es lo suficientemente grande obligará a la utilización de diferentes puntos de referencia en función de la zona concreta del territorio sobre la que se esté trabajando pudiendo, en función de las características de la zona, la geometría de la red y de su tamaño y de las condiciones de observación, encontrarse zonas en las cuales las condiciones de observación no sean buenas e incluso zonas sin cobertura. En la figura 3 se muestra un ejemplo de las variaciones en la cobertura de la zona de trabajo en función de que las condiciones de observación varíen por ejemplo en función de la calidad de la constelación o la actividad ionosférica. Frente a este planteamiento, empleado en las mediciones en modo RTK tradicional las redes RTK presentan una gran ventaja. El planteamiento de las mismas se basa en la disposición de receptores G.P.S. fijos sobre puntos de la geodesia local. Esto supone una serie de ventajas: 1. La utilización de un marco de referencia observado con G.P.S. permite disponer de una red geodésica muy coherente facilitando el trabajo topográfico, sobre todo en grandes obras. 2. Modelado mucho más precisa de las fuentes de error que afectan a los receptores G.P.S. Como se ha citado anteriormente los métodos diferenciales clásicos se basan en la suposición de que los errores que afectan al receptor móvil son los mismos que en el caso del receptor fijo. Frente a esta suposición, la disponibilidad de varios receptores fijos en torno a la zona de trabajo, permite un modelado espacial de estos errores por lo que se reduce en gran medida el error que se comete al considerar la magnitud de los errores del móvil iguales que los del fijo. 3. El hecho de usar varios receptores de referencia facilita la resolución de las ambigüedades tanto en el tiempo necesario para su resolución como en la mayor fiabilidad de las mismas. 4. Se reduce en gran medida la dependencia de los errores cometidos de la distancia entre receptores. Esto permite que se pueda trabajar con líneas-base mucho más largas que las tradicionalmente empleadas, siendo posible precisiones de orden centimétrico a distancias incluso de 40-50 Km. 5. La implantación de redes de estaciones fijas G.P.S. a lo largo del territorio permite a los actuales usuarios prescindir del receptor fijo, que puede usarse como móvil con el consiguiente aumento de la rentabilidad de la inversión en el equipo, y el aumento del rendimiento del mismo al desaparecer el inconveniente de la necesidad de desplazar el receptor fijo en función de los cambios de la zona de trabajo. Una consecuencia derivada del aumento de la longitud de las líneas base utilizables es la necesidad de incorporar a los equipos, módems GSM que permitan conectarse a la estación de control del sistema para recibir las correcciones diferenciales en aquellas zonas en donde el radioenlace tradicional no disponga de cobertura. El enlace GSM en la actualidad presenta la ventaja de su gran cobertura, lo cual elimina en gran medida los problemas que actualmente se encuentran los topógrafos en las zonas de difícil geometría tales como vaguadas, etc. 230 ZONA DE TRABAJO Exactitud, Fiabilidad, Disponibilidad Mala Buena a) ZONA DE TRABAJO Exactitud, Fiabilidad, Disponibilidad Mala Buena b) ZONA DE TRABAJO Exactitud, Fiabilidad, Disponibilidad Mala Buena c) FIGURA 3. Grado de cobertura de una zona en función de las condiciones de observación G.P.S. 231 En la actualida existen básicamente dos tipos de modelado de los errores en las redes rtk que son Geo++ GNNET-SMART y VRS [Peñafiel, 2002]. Datos brutos GPS Estación referencia Estación referencia VRS Centro de control de la red Correcciones RTCM via GSM Radio - Comunicacion - Modelación del error - Monitorización - Creación de datos virtuales - Salida RTCM o Estación referencia FKP Datos brutos GPS Estación referencia Estación referencia FIGURA 4. Esquema de una red RTK. Geo++ GNNET-SMART En este tipo de modelación se emplean los datos de todas las estaciones fijas de manera conjunta, generándose un modelo dinámico general del “estado del espacio” así como unos parámetros de corrección de los errores espaciales para cada zona del territorio denominados FKP que el receptor móvil emplea para generar sus correcciones por interpolación. Como ventajas de este sistema se encuentra la posibilidad de un número de usuarios del sistema ilimitado y la unidireccionalidad de la comunicación desde la estación de control a los receptores móviles. VRS En este tipo de modelado el receptor móvil envía su posición a la estación de control del sistema la cual, a partir de la misma, genera unas correcciones como si en la zona próxima al receptor móvil se encontrara una estación de referencia (Virtual Reference Station). Este sistema de modelado implica la bidireccionalidad de la comunicación entre los receptores (el móvil debe enviar su posición al fijo y este a su vez envía las correcciones al móvil). Además el hecho de generar unas correcciones específicas para cada receptor móvil que se encuentre en la zona limita el número de usuarios del sistema y requiere de grandes recursos de computación y de transmisión en la estación de control para la generación y difusión de las correcciones. 232 IBEREF El proyecto IBEREF supone la implantación en el terreno de la primera red RTK de España. Aunque su difusión aún es limitada, se están buscando los apoyos necesarios para la puesta en funcionamiento del mayor número de estaciones de referencia GPS permanentes posibles, con el propósito de dar una cobertura a la comunidad Topográfica/ Cartográfica lo más amplia posible. En la actualidad se dispone de estaciones funcionando en Extremadura, Castilla la Mancha, Cataluña, Madrid y Galicia. Cabe destacar el desarrollo de la red en Madrid en donde en breve se contará con 7 estaciones. En un futuro próximo está prevista la instalación de 3 nuevas estaciones en el País Vasco y una más en Navarra. Como servicios disponibles en la actualidad para los usuarios de IBEREF se encuentra la posibilidad de acceder a la siguiente información: • datos brutos disponibles en WEB/FTP (www.iberef-gps.com). • correcciones diferenciales RTK (formato Leica de tipo FKP). • correcciones RTCM (correcciones estándar) con precisión de unos pocos centímetros. El proyecto está liderado por Leica Geosystems, contándose con apoyos locales de instituciones privadas y públicas con el prestigio adecuado dentro de la comunidad Topográfica, que lideran el proyecto localmente, así como la gestión de estas redes locales de estaciones de referencia GPS. Las estaciones de referencia constan de receptores GPS de doble frecuencia (L1 y L2) preferentemente con antena de tipo choke-ring que registran datos cada 1 segundo. Están dotadas de la capacidad para enviar mensajes RTCM/RTK mediante GSM, radio o de ambos a la vez con el fin de obtener precisión en torno a los 1-3 cm. en cualquier lugar de la Red en tiempo real. Esto permitirá al sistema ofrecer las precisiones requeridas para su utilización en obra. En una fase posterior está previsto dejar estas correcciones en Internet, cuando exista la tarifa plana en las conexiones GPRS y los equipos GPS móviles estén preparados para una conexión en campo a Internet. Esto permitirá una gestión más eficiente de los usuarios del sistema ya que los mismos, en vez de conectarse directamente a la estación de control cuya capacidad de usuarios simultáneos está limitada al número de líneas disponibles, lo harán a través de un servidor del sistema y de la página web creada al efecto. En la actualidad esta posibilidad ya es técnicamente posible aunque su implantación está temporalmente detenida por su alto coste de operación. ESPECTATIVAS DE FUTURO Dadas las evidentes ventajas que presentan las redes RTK frente al método RTK tradicional se espera que tanto IBEREF como otras redes similares tengan una rápida expansión en los próximos años por todo el territorio nacional. Es posible que a pesar de sus evidentes ventajas la implantación de un sistema de este tipo de manera permanente no sea rentable en aquellas zonas donde la 233 actividad constructiva sea escasa. A pesar de ello el sistema en estas zonas sí sería operativo aunque seguramente no se alcanzarían los estándares de precisión que se requieren en construcción aunque sí serían válidos para otras muchas aplicaciones (ordenación del territorio, catastro de rústica, etc.). Los niveles de precisión alcanzables en tales condiciones serían variables en función de factores como la distancia hasta la red RTK más cercana, la geometría respecto de la misma, etc. Para la realización de obras en estas zonas sin embargo sí que podría ser rentable la implantación de micro-redes RTK temporales formadas por estaciones fijas móviles que pudieran ser desplazadas a aquellas obras que, por su envergadura y su alto presupuesto, lo justificaran económicamente. REFERENCIAS Capdevila, J. “Modelos matemáticos de las observaciones G.P.S.” Servicio Regional del IGN, 1995. Bétaille, D. “G.P.S. signal code and phase tracking and multipath mitigation techniques” 1º Jornada G.P.S. Universidad Pública de Navarra, Pamplona, Octubre 2002. Leica AG. “Guía para las mediciones G.P.S. Stop and Go y cineméticas” G.P.S.-System 300, G2-905-Oes-IL.98, 1998 Mansilla, G.A., Ríos, V.H., Manzano, J.R., Lagori, J.F. “Comportamiento diario y latitudinal del tiempo de retardo ionosférico de señales G.P.S. para propagación cuasilongitudinal sobre estaciones de Sudamérica(1)” Revista de Geofísica, nº 46, pp: 159-164, 1990. Peñafiel, J. “Introduction to RTK network solutions” G.P.S. Networks conference, Heerbrugg, 2002. Peyret, F. “The paradigm of computer integrated construction applied to civil-engineering”. Laboratoire Central des Ponts et Chaussées, France, 2000. Seco, A. “Aplicación de tecnología G.P.S. a la generación de los modelos digitales del terreno en ingeniería civil”. Tesis Doctoral. Universidad Pública de Navarra, 2001. Seco, A.“Situación actual del G.P.S. en ingeniería civil en Navarra” 1º Jornada G.P.S. Universidad Pública de Navarra, Pamplona, Octubre 2002. 234