Langlois, Emilio - Universidad Tecnológica Nacional
Anuncio

UNIVERSIDAD TECNOLÓGICA NACIONAL
Facultad Regional Bahía Blanca
Departamento Ingeniería Mecánica
MECÁNICA
RACIONAL
Alumno: Langlois Emilio
Profesor Titular: Dr. Ing. Liberto Ercoli
TRABAJO FINAL
-2009-
Ingeniería Mecánica U.T.N.-F.R.B.B
Langlois Emilio
Mecánica Racional
2009
PROBLEMA 1: Cinemática y cinética del cuerpo rígido
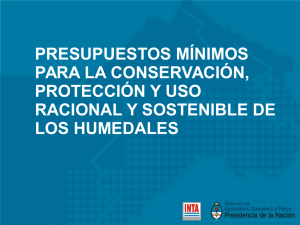
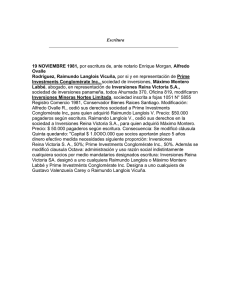
El eje de giro de la turbina mostrada es horizontal, y está alineada con el eje
longitudinal del barco. Su masa es de 400 kg y esta montada sobre los
rodamientos A y B. Su centro de masa es G y los radios de giro kx = ky= 0,5m;
kz = 0.3 m.
Gira a 200 rad/seg con respecto al barco, el cual está impreso de una rotación
instantánea
, correspondiente a los movimientos de rolido,
viraje y cabeceo, respectivamente.
a = 0,8 m
b = 1.3 m
2
Ingeniería Mecánica U.T.N.-F.R.B.B
Langlois Emilio
Mecánica Racional
2009
Determinar:
1) Invariante escalar, vectorial y tipo de movimiento
2) Velocidad y aceleración de un punto que está situado a 25 cm por debajo de
G
3) Energía cinética de la turbina
4) Reacciones en A y B cuando el barco sólo rola , vira o cabecea. Explicar los
resultados en cada caso
5) Graficar el elipsoide de inercia en G.
3
Ingeniería Mecánica U.T.N.-F.R.B.B
Langlois Emilio
Mecánica Racional
2009
Resolución:
1) Invariante vectorial
El vector rotación ω , es la resultante de todas las rotaciones que afectan al
sistema y será la misma cualquiera sea el centro de reducción adoptado, por
ello es que se le suele llamar invariante vectorial del sistema. Por lo dicho
anteriormente, el invariante vectorial está dado por la expresión:
Siendo las diferentes velocidades que afectan al sistema, que para nuestro
caso de estudio son:
ω1={0,0,0.2}
ω2={0,0.8,0}
ω3={1.4,0,0}
ωt={0,0,200}
De esta manera el invariante vectorial será:
{1.4,0.8,200.2}
Invariante escalar
Los vectores velocidad de un sistema material rígido proyectados en un
determinado instante sobre la dirección del vector rotación, son una constante
que recibe el nombre de invariante escalar, y viene dado por:
Donde Vi es la velocidad de cualquier punto del cuerpo y
En nuestro caso como G es un punto del eje de rotación ,
4
es el versor de .
Ingeniería Mecánica U.T.N.-F.R.B.B
Langlois Emilio
Mecánica Racional
2009
Los invariantes vectorial y escalar son de gran importancia ya que nos definen
el tipo de movimiento. Si el invariante escalar es igual a cero, entonces hay
dos posibilidades, que v sea perpendicular a o como en nuestro caso que G
sea un punto del eje de rotación. El tipo de movimiento resultante que tenemos
es un movimiento de rotación instantánea (rotaciones concurrentes).
Decimos que las rotaciones son concurrentes cuando existe un punto (en
nuestro caso G) al cual concurren todas.
2) Cálculo de velocidad y aceleración del punto P
Para calcular la velocidad de P que se encuentra 25 cm por debajo de G
utilizaremos la expresión:
Donde
es el vector desde G a P
Y
{1.4,0.8,200.2}
= {50.05,0.,-0.35}
El cálculo fue realizado por el método absoluto.
A continuación vamos a comprobar que el invariante escalar antes calculado
verifica el mismo resultado
5
Ingeniería Mecánica U.T.N.-F.R.B.B
Langlois Emilio
Mecánica Racional
2009
Suponiendo que no hay aceleración angular γ, la aceleración de P, es:
También calculada por el método absoluto.
3) utilizando los radios de giro, sacamos los momentos de inercia
Siendo m la masa y kx, ky, kz los radios de giro
La expresión da la energía cinética para un sistema rígido :
Donde Iwwg es el momento de inercia de la turbina respecto de su eje de
rotación w.
En nuestro caso al ser un movimiento de rotación la energía cinética queda
resumida a:
Como las componentes de la rotación coinciden con los ejes principales de
inercia, la expresión anterior puede ser sustituida por:
4) Cálculo de las reacciones
a) Cuando el barco sólo rola:
En este caso el
(de rolido) y (de la turbina) tienen la misma dirección
por lo cual no se generan momentos dinámicos asociados, por lo tanto las
reacciones que soporta el sistema son las estáticas, sólo el propio peso.
6
Ingeniería Mecánica U.T.N.-F.R.B.B
Langlois Emilio
Mecánica Racional
2009
y
el vector que va desde G a A y de G a B respectivamente.
Siendo
Con estos podemos calcular las reacciones y comprobar lo antes mencionado.
Para el cálculo se utiliza el software Mathematica (a continuación se adjuntan
los cálculos).
{-1.3 Ray+0.8 Rby,1.3 Rax-0.8 Rbx,0}
{{Ray→1493.33,Rby→2426.67}}
{{Rax→0.,Rbx→0.}}
rga y rgb están en metros y el peso en N, por lo cual las reacciones Rax, Ray,
Rbx y Rby están en N.
b) Cuando el barco sólo vira:
A diferencia del caso anterior las rotaciones
y
(de viraje) forman entre
sí un angulo de 90 grados produciendo un momento giroscópico en la
dirección que vale
y que origina las reacciones. Los cálculos se
adjuntan a continuación:
7
Ingeniería Mecánica U.T.N.-F.R.B.B
Langlois Emilio
Mecánica Racional
2009
{{Rax→0.,Rbx→0.,Ray→-1249.52,Rby→5169.52}}
Como se puede observar las reacciones han cambiado, porque existe el
momento giroscópico, produciendo un aumento de las reacciones.
b) Cuando el barco sólo cabecea:
Este caso es similar al anterior solo que
y generan un momento en la
dirección de originando reacciones dinámicas horizontales solamente.
{{Rax→-4800.,Rbx→4800.,Ray→1493.33,Rby→2426.67}}
8
Ingeniería Mecánica U.T.N.-F.R.B.B
Langlois Emilio
Mecánica Racional
2009
Cabe destacar que a la hora de dimensionar o calcular reacciones es muy
importante tener en cuenta los efectos que produce la disposición de las
rotaciones ya que las fuerzas en juego pueden aumentar considerablemente
debido a los momentos giroscópicos. En la vida cotidiana es frecuente que
estos efectos se crucen, un ejemplo de esto puede ser cuando utilizamos una
amoladora de mano, cuando la giramos (cambiamos la dirección de la
velocidad de rotación propia o espín mediante una presesión), podemos sentir
que la amoladora tiende a irse de nuestras manos, producto del momento
giroscópico resultante.
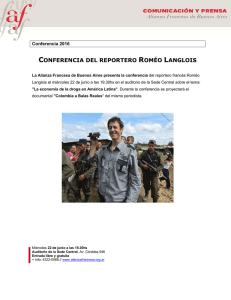
5) Elipsoide de inercia en G
La geometría del elipsoide de inercia define por completo las propiedades
Inerciales del cuerpo respecto de cualquier punto. Es decir, representa
gráficamente el tensor de inercia en un punto
Ahora:
es la expresión de una superficie cuádrica centrada en G. Según nuestro tensor
de inercia, resulta reemplazando en la expresión anterior
Además, la ecuación canónica de un elipsoide es:
Siendo a, b y c los semiejes del elipsoide
9
Ingeniería Mecánica U.T.N.-F.R.B.B
Langlois Emilio
Mecánica Racional
2009
Finalmente, mediante el paquete Graphics`ContourPlot3D` del software
Mathemática 7.0, realizamos la gráfica del elipsoide de inercia.
A continuación se adjunta la hoja de cálculo para la obtención de dicha
gráfica:
10
Ingeniería Mecánica U.T.N.-F.R.B.B
Langlois Emilio
Mecánica Racional
2009
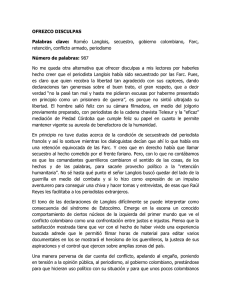
Proyección en el plano x-y:
y
0.2
0.1
0.0
x
0.1
0.2
0.2
0.1
0.0
0.1
0.2
Proyección en el plano z-x
z
0.2
0.1
0.0
x
0.1
0.2
0.2
0.1
0.0
11
0.1
0.2
Ingeniería Mecánica U.T.N.-F.R.B.B
Langlois Emilio
Mecánica Racional
2009
Proyección en el plano z-y
z
0.2
0.1
0.0
y
0.1
0.2
0.2
0.1
0.0
12
0.1
0.2
Ingeniería Mecánica U.T.N.-F.R.B.B
Langlois Emilio
Mecánica Racional
2009
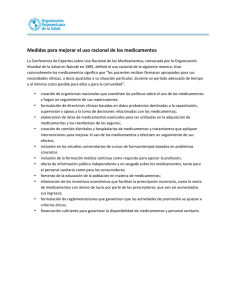
PROBLEMA 2: Vibraciones mecánicas
El motor eléctrico de masa M = 30 kg descansa en reposo sobre un aislador de
vibraciones compuesto por cuatro resortes en paralelo, cada cual con una
rigidez k = 200 N/m y un amortiguador cuyo factor de amortiguamiento es
c/cc = 0,15. Si el motor R no está balanceado, de modo que el efecto sea
equivalente al de una masa m = 4 kg localizada 60 mm fuera del eje de
rotación, y gira a una velocidad angular w = 10 rad/seg, determinar:
a) Ecuación del movimiento de M
b) Fuerza en el resorte y el amortiguador cuando t = 1 seg
c) Frecuencia circular reducida y pseudoperíodo
d) Ley horaria del movimiento estable de M si en t = 0 es x = 0,1 m y v =
0. Graficar y(t), v(t) y a(t)
13
Ingeniería Mecánica U.T.N.-F.R.B.B
Langlois Emilio
Mecánica Racional
2009
e) Ubicar la condición de funcionamiento del motor en las gráficas de
amplitud: wf/wn-c/cc y fase: wf/wn-c/cc
a) Consideremos el sistema mecánico Amortiguador-Masa-Resorte
Fo cos wf t
Utilizando la segunda Ley de Newton del movimiento: la aceleración de
cualquier cuerpo rígido es directamente proporcional a la fuerza que actúa
sobre él e inversamente proporcional a la masa del cuerpo, es decir
F=ma
Haciendo el diagrama de cuerpo libre de la masa en el modelo
surge que sobre dicha masa actúan tres fuerzas: la fuerza del resorte (FR), la
fuerza del amortiguador (FR) y una fuerza externa (FE).
Podemos establecer las siguientes relaciones para modelar las fuerzas tanto del
resorte como del amortiguador:
14
Ingeniería Mecánica U.T.N.-F.R.B.B
Langlois Emilio
Mecánica Racional
2009
Resorte
FR = k (y2 − y1)
Amortiguador
Con la hipótesis simplificativa de que la fuerza del amortiguamiento viscoso
es proporcional a la velocidad.
FA = c (y’2− y´1)
Donde k y c son las constantes del resorte y el amortiguador respectivamente
y las comillas indican derivadas con respecto al tiempo.
Atendiendo a lo anterior y apoyados en la segunda ley de Newton del
movimiento, tendremos pues que si queremos analizar el desplazamiento
vertical de la masa, el modelo matemático que lo describe se obtiene como
sigue
- Fr – Fa + Fe(t) = m a
15
Ingeniería Mecánica U.T.N.-F.R.B.B
Langlois Emilio
Mecánica Racional
2009
Como
FR = k y
FB = c y’
a = y’’
Entonces
M y’’+ c y’ + ky = FE(t)
Donde m, k y c son constantes y FE es la fuerza externa (excitación del
sistema). La anterior es una ecuación diferencial lineal con coeficientes
constantes no homogénea en general. En caso de que FE = 0 se dice que es un
movimiento libre mientras que si FE
0 se define como un movimiento
forzado.
En el caso de nuestro problema, la fuerza de excitación es distinta de cero por
lo cual estamos en un caso de vibración forzada.
Los datos del problema son los siguientes:
M = 30 kg
K = 200 N/m
m = 4kg
e = 60mm
w = wf = 10rad/seg
Los cuatro resortes están colocados en paralelo, por lo cual la K equivalente
es:
Keq = 800 N/m
La frecuencia circular natural del sistema viene dada por:
Wn=
= 5,16 rad/seg
Se la llama natural porque es la frecuencia propia con la que vibra el sistema
al dejarlo libre.
16
Ingeniería Mecánica U.T.N.-F.R.B.B
Langlois Emilio
Mecánica Racional
2009
Como ya habíamos mencionado anteriormente la ecuación de movimiento de
M es:
(1)
Para resolver esta ecuación nos falta encontrar: c y F0
Siendo c y cc el coeficiente de amortiguamiento y amortiguamiento crítico
respectivamente, con estos datos podemos resolver la ecuación diferencial:
y[t] = yh[t] + yp[t]
La solución de la homogénea va a ser calculada con el software Mathematica:
{{y[t]
t]}}
-0.774597 t C[2] Cos[5.10555 t]+ -0.774597 t C[1] Sin[5.10555
Donde C[1]y C[2] son las constantes de integración
Pasamos a determinar una solución particular de la no-homogénea .
Proponemos como solución a:
. Por consiguiente:
17
Ingeniería Mecánica U.T.N.-F.R.B.B
Langlois Emilio
Mecánica Racional
2009
Reemplazando en:
Igualando los coeficientes de los senos y cosenos:
Resolvamos este sistema:
multiplicamos a la primer ecuación por
Sumando m. a m. obtenemos
18
y la dividimos por
Ingeniería Mecánica U.T.N.-F.R.B.B
Langlois Emilio
Mecánica Racional
2009
- Si c = 0, obtenemos la solución correspondiente a “Vibraciones forzadas de
un sistema sin amortiguamiento”.
En efecto resulta:
B=0 y
La solución general de la ecuación homogénea asociada a la ecuación (1) con
c = 0, es:
Y así llegamos a la solución del problema c = 0 que es la de las vibraciones
forzadas de un sistema no amortiguado.
- Si c ≠ 0
Vamos ahora al caso general en el que existe un amortiguamiento viscoso c.
La solución particular yp de (1) viene dada por:
19
Ingeniería Mecánica U.T.N.-F.R.B.B
Langlois Emilio
Mecánica Racional
2009
(2)
en nuestro caso
La solución de la ecuación es
Y[t] = yh[t] + yp[t] =
Con las condiciones iníciales podremos determinar las constantes.
b) La fuerza en el resorte cuando t = 1 seg, es:
FR = 6.04982 N
La fuerza en el amortiguador cuando t = 1 seg, es proporcional a la velocidad;
con el Mathematica obtenemos la derivada de la posición y
0.0220613 Cos[10 t]+0.10443 Sin[10 t]
= -0.0753233
Fa= -0.0112985
Por lo tanto para la fuerza del resorte como para la del amortiguador se utiliza
la parte particular de la resolución de la ecuación diferencial (yp).
20
Ingeniería Mecánica U.T.N.-F.R.B.B
Langlois Emilio
Mecánica Racional
2009
c) β es la frecuencia circular natural reducida y como
, cuanto más pequeño es c, es mayor β y por lo tanto las
oscilaciones, más rápidas. T es el pseudoperíodo =
Nótese que cuando
y resulta el movimiento de vibraciones
libres sin amortiguamiento.
En nuestro caso β= 5.10555
y T= 1.23066[seg]
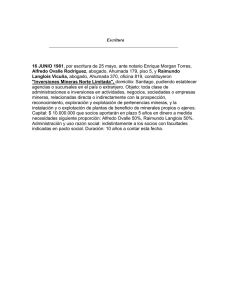
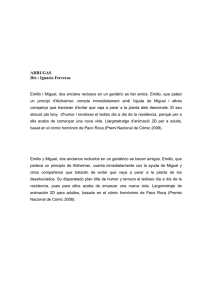
d) Gráfica del movimiento de M:
21
Ingeniería Mecánica U.T.N.-F.R.B.B
Langlois Emilio
Mecánica Racional
2009
Y
0.10
0.05
1
2
3
4
5
2
3
4
5
t seg
0.05
m
V
seg
0.2
1
0.2
0.4
22
t seg
Ingeniería Mecánica U.T.N.-F.R.B.B
Langlois Emilio
a
Mecánica Racional
2009
m
seg2
3
2
1
1
2
3
4
5
1
Para realizar las gráficas fue utilizado el software Mathematica 7.0; derivando
la posición de la solución de la ecuación diferencial (y(t)), obteniendo la
velocidad de M y derivando nuevamente, su aceleración.
23
t seg
Ingeniería Mecánica U.T.N.-F.R.B.B
Langlois Emilio
Mecánica Racional
2009
f) En nuestro caso, se puede observar que estamos lejos de la zona de
resonancia (
, condición indeseada), obteniendo un valor del
coeficiente de amplificación menor a 0,5. Significa que la fuerza
aplicada dinámicamente es menos de la mitad que si se la aplicara
estáticamente. Esta gráfica es la correspondiente a
M
3.0
2.5
2.0
1.5
1.0
0.5
f
0.5
1.0
1.5
24
2.0
2.5
3.0
n
Ingeniería Mecánica U.T.N.-F.R.B.B
Langlois Emilio
Mecánica Racional
2009
rad
3.0
2.5
2.0
1.5
1.0
0.5
f
0.5
1.0
1.5
2.0
2.5
3.0
Este gráfico de fases indica que el desfasaje entre la entrada al sistema FE(t) y
la salida y(t), es cercano a los 180 grados.
25
n
Ingeniería Mecánica U.T.N.-F.R.B.B
Langlois Emilio
Mecánica Racional
2009
Software utilizados:
• Microsoft Word 2007
• Mathemática 7.0
Bibliografía
• Monografía de la Cátedra, Mecánica Racional, Prof. Ing. Liberto Ercoli,
2007.
• Dinámica, Mecánica para ingenieros; Meriam J.L., Reverte.
• Dinámica, Ingeniería Mecánica; R.C.Hibbeler
• Mecánica; Luis Roque Argüello, Answer Justin Time.
• Dinámica, Mecánica para ingenieros; Shames Irving H., Prentice-Hall.
• Mecánica Vectorial; Beer-Johnston.
26