Tp 3 - Facultad de Ingeniería
Anuncio

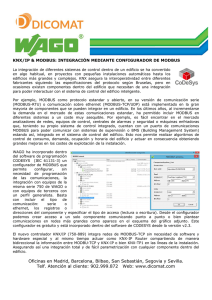
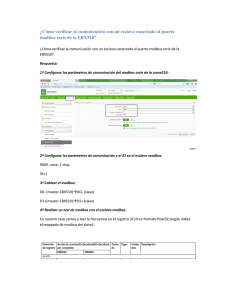
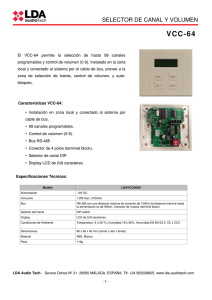
UNIVERSIDAD DE BUENOS AIRES FACULTAD DE INGENIERÍA DEPARTAMENTO DE ELECTRÓNICA LABORATORIO 6: REDES INDUSTRIALES 66.48 – SEMINARIO DE REDES ALUMNOS Grupo: • Orlandi, Guido 78602 • Veira Tassara, Alejandro Agustín 79458 2° CUATRIMESTRE 2005 Índice Objetivos Definiciones Fieldbus (bus de campo) Mecanismo de Schedulling Bus AS-I CAN (Control Area Network) DeviceNet Modbus Profibus Anexo RS 422 RS 485 RS 232 Objetivos El objeto del siguiente trabajo es presentar una breve descripción de las redes utilizadas en el ambiente industrial. En comparación con la amplia difusión del estándar 802.3/Ethernet-TCP/IP, no existe en el ambiente industrial un estándar ni una solución de amplia difusión. La respuesta a las necesidades consiste en un conjunto de diversas soluciones propietarias que aplican distintos métodos de acceso al medio, etc. Surgen dos preguntas intuitivas: que requiere una Red Industrial (a diferencia de una red de datos) y por que los estándares de redes de datos no son apropiados. A continuación intentaremos encontrar un conjunto de respuestas satisfactorias a las preguntas anteriores. Los buses que vamos a describir son solo algunos de los existentes, pero dado a que no existe un estándar, sino que se trata en general de protocolos propietarios, elegimos estos debido a su amplia utilización en el mercado, a nuestro entender. Existen también otras redes muy conocidas. Definiciones Una Red Industrial es utilizada en un sistema de producción, se encarga de conectar distintos procesos de aplicación con el propósito de asegurar la explotación de la instalación. La red debe cumplir las siguientes condiciones: • • • Red de tiempo real: la información debe poder se enviada en el momento que se genera e idealmente debe llegar en el mismo momento que se genera. Aunque esto último no se cumple exactamente, si se puede pedir a una red industrial una demora en la emisión y arribo de los datos mucho mayor que a una red convencional para datos. Provee servicio bajo restricciones temporales: lo cual implica que un dato, dependiendo de su prioridad puede tener que ser entregado en un tiempo determinado, fijo (algo que no puede darse en una red Ethernet). Identificación de prioridades: Para priorizar la entrega de determinados datos sobre otros. A diferencia de una red convencional de datos, en la Red Industrial los recursos son utilizados por procesos cuyo servicio ya está definido y en muchos casos tiene un tiempo de respuesta crítico. En vista esto, la red debe proveer un sistema de distribución de tráfico determinístico. Si se piensa en el método tradicional de entrega de datos de Ethernet, el CSMA-CD, se comprende que ante la posibilidad de que otro usuario este utilizando el medio, habrá que “esperar” que este termine, para agravar las cosas este tiempo de espera no esta definido, sino que depende de las necesidades del usuario y de la aplicación, además en caso de que dos terminales transmitan a la vez y haya colisión, deberá retransmitirse pasado un cierto tiempo, no determinado, pudiendo darse el caso inclusive de que alguno de los terminales “desista” de enviar sus datos. Esto es lo que se conoce como método de acceso al medio aleatorio. En contraposición un medio de acceso determinístico asegura a cada proceso un instante de acceso y un intervalo de tiempo durante el cual puede transmitir determinado, y además garantiza una demora acotada en el tiempo de acceso al medio. Todos estos parámetros se fijan de acuerdo a la prioridad y las necesidades del proceso. Según nuestra consideración de Red Industrial hay que decir que además de interactuar con los distintos procesos, además esta conectada con redes de datos, permitiendo acceder a la información del control de la industria desde terminales conectados a la Internet o a una red IP-Privada. El siguiente gráfico muestra como se da esa interacción. Para conectar la FAN con la LAN se colocan un gateway capaz de “traducir” los protocolos de las distintas redes. Cabe aclara que, en la mayoría de los casos, más allá de la red de supervisión no se puede actuar sobre ningún parámetro de la red industrial, simplemente esta para ser consultado a modo informativo. La conexión de la LAN con la WAN se realiza en general a través de más de un firewall para garantizar la seguridad y confidencialidad de los datos industriales. En lo que sigue nos concentraremos en las partes más baja de la imagen, la Red de Campo y la Red de Control de Procesos. Fieldbus (bus de campo) La primera red que se ve de abajo hacia arriba es la red que se encarga de conectar los que se conoce como dispositivos de campo (PLCs, controladores, sensores, actuadores, etc.) distantes entre si. Esto es un bus de campo, el objetivo de un bus de campo es sustituir las conexiones punto a punto, utilizadas en tiempos pasados, entre los elementos de campo y el equipo de control, hoy reemplazadas típicamente con redes digitales, bidireccionales, multipunto, montadas sobre un bus serie. Solución centralizada tradicional Solución distribuida con bus de campo con salida a redes de datos Los buses de campo tienen ventajas frente a las soluciones centralizada en cuanto al costo y las facilidades del diseño, la instalación y la futura ampliación. Además mucho de los procesos de control y señalización de la comunicación que antes debían estar incluidos en los controladores hoy pueden distribuirse en los diversos dispositivos de campo, simplificando tareas. Por otro lado si un dispositivo de campo requiere algún dato de otro D.C. puede pedírselo directamente, sin necesidad de pedírselo al controlador, ya que están conectados sobre el mismo bus. Aquí surgen otra vez los conceptos analizados antes, de tiempo de respuesta determinístico por parte de la red o el bus de campo. En lo que resta del trabajo nos encargaremos de analizar los diversos estándares y protocolos de acceso al medio en buses de campo, en orden creciente de complejidad. Requisitos de un fieldbus (bus de campo): 1. Transportar pequeños paquetes de datos en un tiempo acotado, el tamaño de los datos es corto para ocupara lo menos posible la red (Ethernet no cumple este requisito). 2. Transmitir datos periódicos antes de que vuelvan a ser muestreados, los componentes en régimen toman datos de manera periódica y deben transmitirlos antes de renovar dichos datos. 3. Transmitir datos aperiódicos en un tiempo acotado. 4. Indicar la si la frecuencia con que se muestrea un dato está acorde a la importancia de ese dato (consistencia temporal), es de vital importancia controlar este parámetro y poder ajustar la red para cumplir los requisitos de consistencia temporal. 5. Poseer medios para determinar el orden en el que se produjeron los datos esporádicos. 6. Soportar transmisiones punto a punto y multipunto. 7. Soportar los ambientes industriales, en general las redes de datos no tienen los medios físicos (cables, conectores, etc. que puedan ser utilizados en ambientes industriales). Ethernet-TCP/IP como bus de campo Como dijimos antes gracias a la gran difusión de Ethernet junto a TCP/IP, a lo largo del tiempo han intentado utilizar esto protocolos en ambientes industriales. Hace más de 20 años aparecieron soluciones como MAP, FACTOR entre otras; todas ellas fueron descartadas por el factor de aleatoriedad que introducía ethernet con TCP/IP. Hoy gracias a la aparición de Switchs que limitan los dominios de colisión, el aumento de las velocidades y la posibilidad de introducir mecanismo de priorización se volvió a pensar en utilizarlas. La siguiente tabla muestra las contras y las soluciones de la utilización de Ethernet con TCP/IP en relación a los requerimientos de un bus de campo. Contras Tamaño mínimo de la trama de 64bytes Método de acceso CSMA-CD Poca capacidad para detallar prioridades Demasiado delay al detectar-corregirretransmitir ante eventuales errores (puesto que es el nivel de enlace el que se Soluciones No es grave a altas velocidades La red se puede subdividir en dominios de colisión colocando switchs y minimizar los problemas ocasionados por el acceso el medio encarga de esto, genera mucho tiempo de procesamiento). Muestreo periódico de datos, requiere mucha complejidad y demora mucho Se puede hacer implementando algoritmos de sincronización a nivel de procesos. Se puede agregar un timestamp para verificar coherencia temporal. No se puede saber el orden relativo de los eventos esporádicos Los cables y conectores estándar no soportan la condiciones industriales Ethernet usa topología de árbol que resulta mas compleja que la utilizada por otros buses Se requiere mayor complejidad computacional para implementar TCP que para otros buses industriales Se debe cablear por separado la alimentación de los equipos Se puede transmitir en modo broadcast Están apareciendo cables y conectores especiales para dicho tipo de ambientes Se ve que sigue comportándose de manera aleatoria la red, además no se puede garantizar la consistencia temporal (solo verificarla), no se puede saber el orden de los eventos, no hay un mecanismo rápido de retransmisión, no hay cableado para alimentación, y además el cableado especial para ambientes industriales es mas caro y complejo que el convencional. Aún hoy utilizar Ethernet con TCP/IP como bus de campo presenta muchos inconvenientes. Queda limitada su funcionalidad a otras partes dentro de la red industrial. Después de ver el estándar de Ethernet y sus múltiples fallas como bus de campo se ve que es necesario definir nuevas tecnología para que puedan cumplir los requisitos necesarios, las siguientes son algunas soluciones desarrolladas con este fin. Las soluciones propuestas utilizan Mecanismos de Schedulling, Redes tipo token-ring, y mecanismos de acceso al medio que definen prioridades. Mecanismo de Schedulling Un mecanismo desarrollado para cumplir las condiciones de bus de campo antes mencionadas es el Schedulling. Este mecanismo, en contraposición con el de CSMACD, consiste en dividir el tiempo en slots y asignar un tiempo de inicio u offset para que cada tarea transmita sus datos dentro de su slot comenzando en su tiempo asignado, así la red presenta un comportamiento determinístico. Además se deja un slot destinado a comunicaciones no programadas dentro del cual puede transmitir cualquier proceso que lo necesite, dentro de ese slot la red presenta un comportamiento aleatorio. Este mecanismo requiere de una sincronización de los procesos, además de un gestor de red que asigne los recursos que le corresponde a cada uno. La siguiente figura ilustra la implementación del mecanismo. El éxito en la implementación de este mecanismo en un bus de campo depende del control de acceso al medio y la velocidad de transferencia. Bus AS-I (ACTUATOR SENSOR INTERFACE) El estándar AS-I comprende la capa física y de acceso al medio. Utiliza un modelo Master-Slave en contraposición con el modelo Cliente-Servidor. En este modelo el Maestro realiza un ciclo de polling obligando a cada esclavo a enviarle sus datos, de a uno por vez, cada esclavo puede tener conectados de uno a cuatro dispositivos. El ciclo entero de polling esta dentro del orden los 5ms, esto impone una restricción a la cantidad de esclavos que se pueden manejar por Maestro y la cantidad de información que cada esclavo puede transferir. El sistema completo consta de: • Maestro que soporta hasta 31 esclavos a una distancia de 300 metros (con repetidoras cada 100m) El maestro puede ser un PLC, en este caso se controla directamente la planta programando el PLC; o puede colocarse Gateway (AS-I), a través del cual se envían los datos I/O tomados del bus de campo a protocolos de capa superior como Profibus, DeviceNet, etc. • Esclavos que pueden ser: Unidades I/O con 4 entradas/salidas digitales para conectar sensores, actuadores, etc.; o dispositivos con chip AS-I integrados. • Fuente de alimentación • Cableado especialmente diseñado para ambientes industriales, en el mismo cable se transportan los datos y la alimentación para los esclavos y los sensores. El bus AS-I soporta configuraciones en red, en línea, en rama y en árbol. CAN (Controller Area Network) CAN es un protocolo definido por las normas ISO11898 e ISO16845 que garantizan el correcto intercambio de datos. CAN se basa en un mecanismo de broadcast con un protocolo orientado a mensajes. Cada mensaje tiene un identificador que es único dentro de la red. El identificador lleva asociada una prioridad que es fundamental en el arbitraje del medio. Método de acceso al medio – Transmisión en tiempo real En la transmisión en tiempo real, los mensajes que se transmite llevan distintos datos que dependiendo del tipo que sea deben ser entregados con mayor frecuencia y/o menor delay que otros. De alguna manera es necesario comparar los mensaje y determinar cual es de mayor prioridad. Esto se lleva a cabo utilizando una técnica conocida como CSMA-APM que se encarga de arbitra el medio de la siguiente manera: Igual que en el caso de Ethernet los nodos que desean transmitir sus mensajes sensan el medio y si no está ocupado pueden transmitir. A diferencia de Ethernet las tramas de CAN no poseen direcciones origen y destino sino que tienen un campo de arbitraje (y se difunden en modo broadcast a todas las otras terminales). En el supuesto que dos o más nodos transmitan simultáneamente, se producirá una colisión, en este caso el medio determina en base al campo de arbitraje cual de los nodos que transmitió simultáneamente tiene derecho a ganar el medio. Esto se determina en función de la prioridad de cada nodo, que viene determinado por el identificador que lleva el mensaje. El bus CAN se comporta como una compuerta AND donde cada entrada lleva conectada un nodo, dependiendo del resultado de la operación lógica entre los campos de arbitraje de todos los nodos que trasmiten simultáneamente es que se determina quien gana el medio y tiene la mas alta prioridad. La siguiente figura muestra como se arbitra el medio mediante CSMA-AMP El que tiene el identificador menor es el que tiene la mayor prioridad y por ende gana el medio. La siguiente figura muestra la trama que utiliza CAN Los campos tienen las siguientes funcionalidades: • • • • • • • Identificador: Identifica el mensaje y su prioridad. En “CAN base frame” este campo tiene 11bits y permite un total de 2048 mensajes distintos, en “CAN extended” tiene 29bits y permite un total de 500 millones de mensajes. Start of Frame: indicando el comienzo de la trama. RTR (remote erminal ct request): Identifica si es un dato enviado o un pedido de datos (se ve que el pedido de un dato es de menor prioridad que un dato enviado). El RTR + Identificador forman el campo de arbitraje. IDE: Utilizado para distinguir entre CAN base o extended. Data length code (DLC): Utilizado para saber la longitud de los datos enviados o la cantidad de datos solicitados dependiendo del RTR. Data: Campo conteniendo los datos enviados. CRC: Es un control de errores de la trama. • ACK: Lo utilizan los nodos que reciben la información correctamente para confirmarla. Utilizan el ACK de la misma trama que reciben y lo cambia de estado. • • EOF: Maraca el final de la trama. IFS: Debe llevar como mínimo un número de bits definidos como el mínimo “espacio” entre tramas. En CAN base la longitud de las tramas debe ser: 44 bits < long. De trama < 111 bits (Esto da un troughtput del 58% del bitrate, además cumple la condición de generar paquetes pequeños de datos en el bus de campo) Control de errores: CAN implementa 3 mecanismos para detectar errores: 1. Un código de redundancia cíclico (CRC), para verificar la integridad de las tramas. 2. Chequeo de las tramas, comprándolas con el tipo y la longitud que deben tener. 3. Control por parte del receptor del ACK. 4. Monitoreo del bus, las estaciones que transmiten saben si lo que se inserta en el medio es el dato que se desea transmitir y en caso de no coincidir avisan del error. 5. Utilización de bit stuffing. En caso de encontrar uno mas de estos errores, se genera una trama de error avisando al resto de las terminales que se difundió en el medio una trama con error, previniendo a los otros nodos de no aceptar mensajes “fallados”. Luego de esto el nodo que emitió los datos debe retransmitir. En el caso de que una estación detecte localmente que está generando gran cantidad de errores, tiene la capacidad de desconectarse del bus si que esto afecte a los otros nodos. La detección es posible gracias a que CAN permite detectar los errores esporádicos y también los permanentes. Definiciones del protocolo CAN • Dentro del modelo OSI ocupa las capas Data Link Layer y Phisical Layer. • CAN utiliza codificación NRZ junto con bit stuffing. • CAN utiliza un sistema sincrónico bit a bit. Puesto que el único delimitador de para sincronismo se encuentra al principio de la trama es necesario a lo largo de esta resincronizar. Para esto se agrega dentro del tiempo de bit una buffer antes y uno después del intervalo de muestreo además de segmento de sincronismo y un delay, como se ve a continuación. Se pueden distinguir entonces 2 sincronizaciones, una en el comienzo de la trama y una resincronización a lo largo de la misma. • Las velocidades van desde los 20kbit/s hasta 1Mbit/s, dependiendo de la longitud del bus. • Existen bridges y repetidores para aumentar la longitud de bus. • Se utilizan gateways para interactuar con protocolos de nivel superior. Aplicaciones CAN originalmente se diseño para el control dentro de automóviles, hoy además se utiliza control de aviones y barcos, en la automatización de industrias y en equipamiento médico entre otras. DeviceNet DeviceNet es un estándar estable para redes industriales que utiliza CAN para su Data Link Layer y CIP (common industrial protocols) para sus capas de nivel superior. Sigue igual que CAN un estándar de productor-consumidor montado sobre una red digital que permite priorización de los mensajes. Además brinda una cualidad única como ser incluir en el cableado de red la tensión de alimentación, pudiendo alimentarse los distintos dispositivos de ahí mismo. Capa Física D.N. utiliza una topología de bus en línea de la cual se pueden derivar otras líneas con nodos. También define un conjunto de velocidades acorde al tipo de cable y las distancias (junto con conectores de uso industrial), que se puede ver en la siguiente tabla. Network Size 125 KBPS 250 KBPS 500 KBPS er Trunk Length Thin Trunk Length Flat Trunk Length Maximum Drop Length Cumulative Drop Length 500 100 420 6m 156 250 m (820 ft) 100 m (328 ft) 200 m (656 ft) 6 m (20 ft) 78 m (256 ft) 100 m (328 ft) 100 m (328 ft) 75 m (246 ft) 6 m (20 ft) 39 m (128 ft) m (1,640 ft) m (328 ft) m (1,378 ft) (20 ft) m (512 ft) Table 2: The end-to-end network distance varies with data rate and cable thickness. Data link layer Como ya dijimos antes, utiliza CAN en esta capa. Capas de red y transporte D.N. requiere que se establezca primero una conexión entre los dispositivos que van a intercambiar información. Para eso se usan los mensajes UCMM o UP. Una vez establecida la conexión, esta es utilizada para transferir información entre nodos. Una vez que se ha establecido la conexión, el protocolo de D.N. se transporta dentro de los 11bit del campo identificación de CAN, esto es una ventaja porque no ocupa lugar en el campo de datos CAN. A continuación mostramos el formato D.N. encapsulado dentro de CAN. El campo de identificación esta dividido en: un MAC ID que identifica la conexión y un Message ID que identifica el mensaje (junto con su prioridad) dentro de la conexión. Los distintos dispositivos pueden ser clientes, servidores o ambos y a su vez cualquiera puede ser productor y/o consumidor. Cada nodo se su vez es el responsable manejar sus identificaciones (MAC ID) y la identificación de sus mensajes. La ventaja de esto es que no se requiere de un registro centralizado de nodos, los cuales a su vez pueden ser agregados o descartados sin necesidad de actualizaciones. Además existe un algoritmo encargado de controlar que no existan MAC´s ID repetidas. Capas superiores – CIP CIP ocupa las capas de sesión, presentación y aplicación en DeviceNet. Es un protocolo de mensajeria (intercambio de mensajes), orientado a conexión donde a cada conexión se le asigna una identificación (CID), en el caso de ser unidireccional, o dos identificaciones en el caso de ser bidireccional. Cada nodo se modela como una colección de objetos. Cada objeto pertenece a una clase (Ej. Drivers, Sensores de temperatura, etc) y se identifica cada uno por su instancia dentro de la clase. Un objeto/instancia o toda una clase poseen atributos o variables que los describen; servicios o comandos y conductas o reacciones que se especifican ante determinados eventos. Además de la gestión de las conexiones, CIP se encarga de intercambiar mensajes entre los diversos objetos. Los mensajes pueden ser: • Implícitos: entre una o más aplicaciones consumidoras y un productor (unidireccional). Está especialmente pensado para datos de control cuyos tiempos son críticos. • Explícitos: provee una conexión punto a punto, bidireccional. Es más lenta que la anterior, un extremo debe solicitarle al otro los datos que necesita. CIP en la capa de aplicación: Le presenta al usuario una lista de los nodos, con sus objetos y a su vez la clase, los servicios, los atributos y las distintas reacciones de estos últimos. CIP en la capa de presentación: Se encarga de “traducir” los datos ingresados por el usuario en datos que pueda entender la capa inferior. CIP en la capa de sesión: Lleva un control de las conexiones abiertas, además se encarga de rutear los datos. En esta capa se colocan la MAC ID del nodo en el que se encuentra el objeto, el número de clase e instancia y el servicio requerido, de modo que la capa inferior (capa de transporte) pueda realizar el ruteo. Aunque estudiamos CIP como protocolo adicional de DeviceNet, también se implementa sobre Ethernet-TCP/IP. Desde ya que siguen siendo válidas todos los inconvenientes que presenta esta tecnología en el control industrial. No obstante lo cual nos muestra lo similares que resultan ser las dos redes. Modalidad Maestro-Esclavo Además de la modalidad peer-to-peer o modelo de cooperación ya estudiada. D.N. permite la modalidad Maestro-Esclavo similar a la del Bus AS-I. Esto es útil cuando se sabe de antemano la frecuencia con la que va a transmitir un dispositivo. Esta modalidad soporta 3 tipos de operación: 1. Polled: Cada esclavo espera recibir el “output data” del maestro y devolverle los datos (en unicast o multicast), en una secuencia de tiempo específica. Así la red presenta un comportamiento determinístico. 2. Cíclico: Cada dispositivo produce y envía de manera periódica sus datos. 3. Change-of-State: Los dispositivo envía datos ante un cambió de estado. Comparación DeviceNet vs. Ethernet DeviceNet Ethernet Tamaño de trama pequeña acorde a los requisitos de un bus de campo. Implementa un sistema de priorización rápido y sofisticado que arbitra el medio. Tamaño de trama grande para el estándar de buses de campo. Implementa un sistema de priorización que introduce mayor delay y no resuelve quien gana el medio. Requiere planeamiento y management de la red para agregar o quitar dispositivos. Simplemente configura y toma los datos de la red. Puede cubrir toda una industria. No hay límites de distancia pudiendo utilizarse diversos medios de transporte (satélite, ATM). Lo tráficos que no corresponden a procesos productivos deben ser filtrados para que no interfieran. Costos bajos por la gran popularidad de Ethernet. Solo datos, pero a mayor velocidad. Simplemente se agregan o quitan los dispositivos de la red. Provee diagnostico de los dispositivos. Abarca un área “reducida” de trabajo. La distancia queda limitada por la velocidad y por la potencia. No se requiere filtrar distintos tipos de tráfico, puesto que solo acepta lo que es DeviceNet. Costos bajos de tecnología CAN El cable lleva datos y alimentación. MODBUS En su definición inicial Modbus era una especificación de tramas, mensajes y funciones utilizada para la comunicación con los PLCs Modicon. Modbus puede implementarse sobre cualquier línea de comunicación serie y permite la comunicación por medio de tramas binarias o ASCII con un proceso interrogación-respuesta simple. Debido a que fue incluido en los PLCs de la prestigiosa firma Modicon en 1979, ha resultado un estándar de facto para el enlace serie entre dispositivos industriales. Modbus Plus define un completo bus de campo basado en técnica de paso de testigo. Se utiliza como soporte físico el par-trenzado o fibra óptica. Es un protocolo utilizado en comunicaciones vía módem-radio, para cubrir grandes distancia a los dispositivos de medición y control, como el caso de pozos de petróleo, gas y agua. Velocidad a 1200 baudios por radio y mayores por cable. Estructura de la red Medio Físico El medio físico de conexión puede ser un bus semidúplex (half duplex) (RS-485 o fibra óptica) o dúplex (full duplex) (RS-422, BC 0-20mA o fibra óptica). (Ver Anexo) La comunicación es asíncrona y las velocidades de transmisión previstas van desde los 75 baudios a 19.200 baudios. La máxima distancia entre estaciones depende del nivel físico, pudiendo alcanzar hasta 1200 m sin repetidores. Acceso al Medio La estructura lógica es del tipo maestro-esclavo, con acceso al medio controlado por el maestro. El número máximo de estaciones previsto es de 63 esclavos más una estación maestra. Los intercambios de mensajes pueden ser de dos tipos: • Intercambios punto a punto, que comportan siempre dos mensajes: una demanda del maestro y una respuesta del esclavo (puede ser simplemente un reconocimiento («acknowledge»)) . • Mensajes difundidos. Estos consisten en una comunicación unidireccional del maestro a todos los esclavos. Este tipo de mensajes no tiene respuesta por parte de los esclavos y se suelen emplear para mandar datos comunes de configuración, reset, etc. PROTOCOLO La codificación de datos dentro de la trama puede hacerse en modo ASCII o puramente binario, según el estándar RTU (Remote erminal ct Unit). En cualquiera de los dos casos, cada mensaje obedece a una trama que contiene cuatro campos principales, según se muestra en la figura 1. La única diferencia estriba en que la trama ASCII incluye un carácter de encabezamiento («:»=3AH) y los caracteres CR y LF al final del mensaje. Pueden existir también diferencias en la forma de calcular el CRC, puesto que el formato RTU emplea una fórmula polinómica en vez de la simple suma en módulo 16. Con independencia de estos pequeños detalles, a continuación se da una breve descripción de cada uno de los campos del mensaje: Número de esclavo (1 byte): Permite erminal ct un máximo de 63 esclavos con direcciones que van del 01H hasta 3FH. El número 00H se reserva para los mensajes difundidos. Código de operación o función (1 byte): Cada función permite transmitir datos u órdenes al esclavo. Existen dos tipos básicos de órdenes: • Ordenes de lectura/escritura de datos en los registros o en la memoria del esclavo. • Ordenes de control del esclavo y el propio sistema de comunicaciones (RUN/STOP, carga y descarga de programas, verificación de contadores de intercambio, etc.) Campo de subfunciones/datos (n bytes): Este campo suele contener, en primer lugar, los parámetros necesarios para ejecutar la función indicada por el byte anterior. Estos parámetros podrán ser códigos de subfunciones en el caso de órdenes de control (función 00H) o direcciones del primer bit o byte, número de bits o palabras a leer o escribir, valor del bit o palabra en caso de escritura, etc. Palabra de control de errores (2 bytes): En código ASCII, esta palabra es simplemente la suma de comprobación (‘checksum’) del mensaje en módulo 16 expresado en ASCII. En el caso de codificación RTU el CRC se calcula con una fórmula polinómica según el algoritmo mostrado en la figura 2. En la capa 7 del modelo OSI que provee comunicación cliente servidor entre dispositivos conectados en distintos tipos de buses o redes. La comunidad e Internet puede acceder a Modbus mediante el puerto reservado TCP/IP 502. Es actualmente utilizado usando: • • • TCP/IP over Ethernet Transmisión serial asincrónica sobre distintos tipos de medios (cable , fibra, radio) MODBUS PLUS, una red de alta velocidad con token. Referencias: RFC 791, Internet Protocol, Sep81 DARPA Abreviaturas ADU BSD HDLC HMI IETF I/O IP MAC MB MBAP MSL PDU PLC TCP Application Data Unit Berkeley Software Distribution High level Data Link Control Human Machine Interface Internet Engineering Task Force Input/Output Internet Protocol Medium Access Control MODBUS Protocol MODBUS Application Protocol Maximum Segment Lifetime Protocol Data Unit Programmable Logic Controller Transport Control Protocol Contexto El Protocolo Modbus permite la fácil comunicación entre todo tipo de arquitecturas de red. Todo tipo de dispositivos (PLC, HMI, Panel de Control, Controlador, control de Movimiento, I/O Device…) pueden usar Modbus para iniciar una operación remota. La misma comunicación puede ser tanto en línea serial como en redes Ethernet TCP/IP. Los gateways permiten la comunicación entre varios tipos de buses o redes usando el protocolo Modbus. Descripción General Se define una unidad de datos de protocolo (PDU) independiente de las capas de comunicación inferiores. Se pueden incluir en distintos buses algunos campos adicionales en la unidad de datos de aplicación (ADU) La ADU es creada por el cliente que inicia la transacción Modbus. La función indica al servidor que tipo de acción tomar. El Modbus aplication protocol establece el formato de un request iniciado por un cliente. El campo de función de una unidad de datos Modbus esta codificado en 1 byte. Los códigos validos van del 1 al 255 decimal (128-255 reservados para excepciones). Cuando un mensaje es enviado desde un Servidor a un Cliente la el campo de función de código le indica que acción debe tomar. (0 no es valido). También se pueden agregar subfunciones para definir múltiples acciones. El campo de datos de los mensajes enviados de cliente a servidor contiene información adicional que el servidor usa para tomar la acción definida en el código de función. El campo de datos puede ser 0 de largo en algunos tipos de respuestas. El tamaño del PDU esta limitado por el tamaño limite proveniente de la primera implementación en Serial Line network (máx. RS485 ADU =256 bytes) PDU serial line communication = 256 – Server address (1 byte) – CRC (2 bytes) = 253 bytes. Entonces: RS232 / RS485 ADU = 253 bytes + Server address (1 byte) + CRC (2 bytes) = 256 bytes. TCP MODBUS ADU = 253 bytes + MBAP (7 bytes) = 260 bytes. Se definen 3 paquetes: • • • MODBUS Request PDU MODBUS Response PDU MODBUS Exception Response PDU Codificación de datos Se usa una “big-Endian” representación para direcciones y datos. Esto quiere decir que cuando una cantidad numérica más larga que un simple byte es transmitida, el byte más significativo se manda primero. Modelo de Direcciones En un PDU cada dato es erminal cta de 0 a 65535 Transacción Una vez que el request fue procesado por el servidor, una respuesta es construida Según el resultado del proceso se construyen dos tipos de respuestas: • Una respuesta positiva: El código de función de respuesta = código de función de request • Una respuesta negativa El objetivo es proveer al cliente información relevante concerniente al error detectado durante el proceso El código de función de respuesta = código de función de request + 0x80 El código de excepción es provisto para indicar el motivo del error Respuestas de Excepciones Si un cliente envía un request a un Server espera una respuesta normal. Una de los cuatro posibles eventos puede ocurrir: • • • • Si el servidor recibe un request sin error de comunicación y puede manejar la consulta normalmente devuelve una respuesta normal. Si el servidor no recibe un request debido a un error de comunicación no devuelve ninguna respuesta. El cliente procesara el timeout del request Si el servidor recibe un request, pero detecta un error de comunicación (parity, LRC, CRC,…), no devuelve respuesta. El cliente procesara el timeout del request Si el servidor recibe un request sin error de comunicación, pero no puede manejarlo (ej. Si el request es leer una salida existente o registro), el servidor va a devolver una respuesta de excepción para informar al cliente de la naturaleza del error. El mensaje de respuesta de excepción tiene dos campos que lo diferencian de la respuesta normal: Campo de código de función: En una respuesta normal, el servidor responde el código de función del request original. Todos los códigos de función tienen un bit mas significativo en 0 (los valores están todos debajo del 80 hexadecimal). En una respuesta de excepción, el servidor setea este bit en 1. Por lo que la respuesta será el número de función más 80. Con el MSB seteado, el programa de aplicación del cliente puede reconocer la respuesta de excepción y examinar el campo de datos del código de excepción. Campo de Datos: En una respuesta normal, el servidor debe retornar datos o estadísticas en el campo (cualquier información que haya sido pedida). En una excepción, el servidor devuelve un código de excepción en el campo de datos. MODBUS Mensajes de Excepción Code Name Meaning 01 ILLEGAL FUNCTION El código de función recibido en la consulta no es una acción posible para el servidor. O porque el código de función es solo aplicable en los dispositivos mas nuevos y no esta implementado en el dispositivo elegido, o bien puede indicar que el servidor esta en el estado incorrecto como para procesar un request de este tipo. 02 ILLEGAL DATA ADDRESS La dirección de datos recibida en la consulta no es permitida para el servidor. 03 ILLEGAL DATA VALUE Un valor contenido en la consulta del campo de datos no contiene un valor possible para el servidor. Ej, el largo 04 SLAVE DEVICE FAILURE Se produjo un error irreparable cuando el servidor trataba de realizar el request. 05 ACKNOWLEDGE Completa el mensaje para saber si el proceso fue finalizado. O para saber si se recibió un request. 06 SLAVE DEVICE BUSY El dispositivo esta retransmitir mas tarde 08 MEMORY PARITY ERROR Al tratar de leer o escribir en memoria se detecta un error de paridad. 0A GATEWAY UNAVAILABLE 0B GATEWAY TARGET Indica que no se obtuvo respuesta del DEVICE dispositivo que se quiere alcanzar. FAILED TO RESPOND Generalmente quiere decir que el dispositivo no esta presente en la red. ocupado se debe PATH Indica que el gateway no fue capaz de encontrar un camino para el ermin de entrada al ermin de salida requerido. Esto quiere decir generalmente que esta desconfigurado o sobrecargado. MODBUS EN TCP/IP Es una variante o extensión del protocolo Modbus que permite utilizarlo sobre la capa de transporte TCP/IP. De este modo, Modbus-TCP se puede utilizar en Internet, de hecho, este fue uno de los objetivos que motivó su desarrollo (la especificación del protocolo se ha remitido a la IETF=Internet Engineering Task Force). En la práctica, un dispositivo instalado en Europa podría ser EEUU o cualquier otra parte del mundo. erminal cta desde Las ventajas para los instaladores o empresas de automatización son innumerables: • Realizar reparaciones o mantenimiento remoto desde la oficina utilizando un PC, reduciendo así los costes y mejorando el servicio al cliente. • El ingeniero de mantenimiento puede entrar al sistema de control de la planta desde su casa, evitando desplazamientos. • Permite realizar la gestión de sistemas distribuidos geográficamente mediante el empleo de las tecnologías de Internet/Intranet actualmente disponibles. Modbus/TCP simplemente encapsula una trama Modbus en un segmento TCP. TCP proporciona un servicio orientado a conexión fiable, lo que significa que toda consulta espera una respuesta. El servicio de mensajes Modbus provee dispositivos en una red Ethernet TCP/IP una comunicación Cliente/Servidor entre Este modelo cliente/servidor esta basado en cuatro tipo de mensajes: • MODBUS Request, • MODBUS Confirmation, • MODBUS Indication, • MODBUS Response MODBUS Request es el mensaje enviado en la red por el cliente para iniciar una transacción. MODBUS Indication es el mensaje request recibido en el lado del Servidor. MODBUS Response es el mensaje request enviado por el Servidor. MODBUS Confirmation es el mensaje request recibido en el lado del Cliente. Este servicio es usado para el intercambio en tiempo real: • Entre dos aplicaciones de dispositivos. • Entre una aplicación de un dispositivo y otro dispositivo. • Entre aplicaciones HMI/SCADA y otros dispositivos. • Entre una PC y un programa de un dispositivo que da servicios online. Documentos de referencia RFC 1122 Requirements for Internet Hosts – Communication Layers Descripción del Protocolo Un sistema de comunicación Modbus TCP/IP debe incluir diferentes tipos de dispositivos: • • Un Cliente y un Servidor Modbus TCP/IP conectados a una red TCP/IP La interconexión entre dispositivos como bridge, router o gateway para interconexión entre la red TCP/IP y una sub red de línea serial que permita conexiones del Cliente y Servidor Modbus Serial Line. Recordando el PDU de Modbus Unidad de datos de aplicación Modbus en TCP/IP Ahora veremos el encapsulado de una respuesta o request Modbus cuando es transportado en una red Modbus TCP/IP. Un header dedicado es usado en TCP/IP para identificar el Unidad de datos de aplicación Modbus. Es llamado header MBAP (MODBUS Application Protocol header). El header posee algunas diferencias comparado con la unidad de datos de aplicación RTU Modbus usado en línea serial: • • • El campo “slave address” usualmente usado en línea serial es reemplazado por un byte “Unit identifier” dentro del MBAP header. Este campo es usado para comunicar vía dispositivos como bridges, routers y gateways que usan una dirección IP para soportar múltiples unidades Modbus independientes Todos los request y respuestas están diseñadas de manera tal que el receptor pueda verificar que el mensaje termino. Para códigos de función donde Modbus PDU tiene un largo fijo, el código de función solo es suficiente. Para códigos de función que lleven una cantidad de datos variables en el request o en la respuesta, el campo de datos incluye un byte de conteo. Cuando es transportado en TCP, se lleva información adicional del largo en el header MBAP para permitir al receptor reconocer los límites del mensaje aunque este haya sido dividido en múltiples paquetes para la transmisión. La existencia de reglas de largo implícitas y explicitas y el uso del código de chequeo de error CRC-32 (en Ethernet) resultan en una chance infinitesimal de detectar mensajes con error. Descripción del Header Campos Identificador de transacción Largo 2 bytes Identificador de Protocolo 2 Bytes Largo 2 Bytes Identificador de Unidad 1 Byte Descripción Identifica la transacción de respuesta o request 0= Protocolo Modbus Cliente Servidor Inicializado por Recopiado por el cliente el servidor del request recibido Inicializado por Recopiado por el cliente el servidor del request recibido Numero de los Inicializado por Inicializado por siguientes el el servidor Bytes cliente(request) (response) Identificación Inicializado por Recopiado por de un esclavo el cliente el servidor del remoto request conectado en recibido una línea serial o en otros buses Modelo de la arquitectura • • Communication Application LayerTCP Management Layer- Administra el establecimiento y el fin de la conexión y administra el flujo de la información en conexiones TCP establecidas o Connection Management – se encarga de administrar globalmente los mensajes de las conexiones TCP. La aplicación de usuario administra las conexiones TCP por si mismo o la administración de la conexión es totalmente realizada por este modulo y entonces es transparente a nivel de aplicación de usuario. o Access Control Module- En algunos contextos, la accesibilidad a datos internos de los dispositivos debe ser prohibida para algunos hosts. Es por eso que se necesita un modo de seguridad. • TCP/IP Stack Layer – Puede ser parametrizado para adaptar el control de flujo de datos, la administración de direcciones y la administración de conexiones de a distintos limites específicos para un producto o un sistema. Generalmente se usa el socket BSD para administrar las conexiones TCP. • Resource management and Data Flor Control- Para equilibrar el flujo de mensajes de datos de entradas con las salidas entre el cliente y el servidor, el mecanismo de data erm control es implementado en todas las capas. Esta basado básicamente en el control de flujo de TCP con el agregado de un control de flujo de datos en la capa de link y también en la capa de aplicación de usuario. TCP CONECTION MANAGEMENT La comunicación Modbus requiere el establecimiento de una conexión TCP entre Cliente y Servidor. Esta puede ser activada explícitamente por el modulo de aplicación de usuario o automáticamente por el modulo de administración de conexión TCP. En el primer caso una interfaz de programa de aplicación debe ser provisto en el modulo de aplicación de usuario para manejar completamente la conexión. Esto le da flexibilidad pero requiere un buen manejo de TCP/IP. En el segundo caso es completamente invisible para la aplicación de usuario. El modulo de administración de conexión de TCP es el que se encarga de establecer una nueva conexión TCP cuando esta es requerida. Si el numero de conexiones llega al máximo para abrir una conexión nueva se cierra las mas antigua. Para terminar una conexión el cliente debe iniciar el procedimiento de cerrado de conexión. PROFIBUS En el año 1987, las firmas alemanas Bosch, Klöckner Möeller y Siemens iniciaron un proyecto de desarrollo de una arquitectura de comunicaciones industriales que permitiera la interconexión de equipos de distintos fabricantes. Esta fue la base de un grupo de trabajo al que se integraron otras grandes empresas tales como ABB, AEG, Landis&Gir, etc., algunas universidades y organizaciones técnicas estatales, entre ellas la propia VDE y el Ministerio Federal de Investigación Alemán. Se formaron varios grupos de trabajo en distintas áreas, cuya tarea esencial fue la de desarrollar un sistema abierto de comunicaciones apto para integrar desde los sencillos transductores y elementos de campo, pasando por los autómatas y controles numéricos hasta llegar al nivel de los mini ordenadores para diseño y gestión de la producción. El primer objetivo fue sólo el diseño de un bus de campo con una estructura abierta y un protocolo compatible que permitiera enlazar con una red adoptada como base en los niveles superiores (MAP), con lo que resultó el proyecto de normas y protocolos que se estudiarán con más profundidad en apartados posteriores. A partir del año 1990 se abrió la posibilidad para cualquier usuario o empresa de integrarse en un consorcio denominado PROFIBUS Nutzerorganisation, que a través de diversos comités sigue desarrollando y dando soporte al nivel de aplicación y certificación de productos. PROFIBUS es actualmente el líder de los sistemas basados en buses de campo en Europa y goza de una aceptación mundial. Sus áreas de aplicación incluyen manufacturación, automatización y generación de procesos. PROFIBUS es un bus de campo normalizado internacional que fue estandarizado bajo la norma EN 50 170. Esto asegura una protección óptima tanto a los clientes como a los vendedores y asegura la independencia de estos últimos. Hoy en día, todos los fabricantes líderes de tecnología de automatización ofrecen interfaces PROFIBUS para sus dispositivos. La variedad de productos existentes incluye más de 1500 elementos y servicios, de los cuales 400 están certificados, asegurando un funcionamiento sencillo y correcto incluso en redes de diferentes fabricantes. PROFIBUS ha sido usado satisfactoriamente en alrededor de 200.000 aplicaciones en todo el mundo y se han instalado más de 2.000.000 dispositivos. Contexto PROFIBUS es un bus de campo erminal que acoge un amplio rango de aplicaciones en fabricación, procesado y automatización. La independencia y franqueza de los vendedores está garantizada por la norma EN 50 170. Con PROFIBUS los componentes de distintos fabricantes pueden comunicarse sin necesidad de ajustes especiales de interfaces. PROFIBUS puede ser usado para transmisión crítica en el tiempo de datos a alta velocidad y para tareas de comunicación extensas y complejas. Esta versatilidad viene dada por las tres versiones compatibles que componen la familia PROFIBUS: PROFIBUS define toda una red de Comunicación industrial, desde el nivel físico hasta el de aplicación, integrando al máximo las técnicas de comunicación previamente definidas y consolidadas. Todos los grupos de usuarios se unen bajo la Organización PROFIBUS erminal ctar (PI), que con más de 750 miembros es la organización de buses de campo más grande del mundo. PROFIBUS emplea un protocolo implementado en la capa 2 del modelo OSI. El control de acceso al medio o MAC se basa en el principio de comunicación Maestro – Esclavo (estación activa – estación pasiva), y entre Maestros mediante Token passing, siendo el Maestro clase l un controlador (típicamente, un PLC), el clase 2 un sistema de monitoreo o configuración (PC o panel HMI). Un esclavo DP es un dispositivo periférico que se encarga de reunir la información de entrada y enviar dicha información como salida al controlador (maestro clase 1) ante su pedido; pueden ser tanto señales simples como dispositivos inteligentes. De este modo, podríamos pensar en una red PROFIBUS DP en la cual un PLC es uno de los maestros, mientras que otro puede ser una PC en la cual corre una aplicación SCADA. Los esclavos pueden ser instrumentos de campo, estaciones remotas, islas de válvulas, posicionadores, PLCs, switchgears, drives, transmisores HART, etc. El controlador central (maestro) puede leer cíclicamente la información de entrada de sus esclavos, y escribir también en forma cíclica la información de los campos de salida de los mismos. El tiempo de ciclo de bus en una configuración extensa de 512 bits de señales de input/output promedia 1ms en 12Mbit/seg de velocidad de transferencia. Las funciones de diagnóstico garantizan que aun a 12Mbits/segundo haya un constante monitoreo y seguridad de la información transmitida. • PROFIBUS PA (Process Automation). Para control de proceso y cumpliendo normas especiales de seguridad para la industria química (IEC 1 1 15 8-2, seguridad intrínseca). Apta para la conexión de instrumentación de campo y actuadores en entornos normales y EX. • Diseñado para automatización de procesos. • Permite la conexión de sensores y actuadores a una línea de bus común incluso en áreas especialmente protegidas. • Permite la comunicación de datos y energía en el bus mediante el uso de 2 tecnologías (norma IEC1158-2). • PROFIBUS DP (Decentralized Periphery/Periferia Distribuida) Para la descentralización de señales y controladores. Orientado a sensores/actuadores enlazados a procesadores (PLCS) o terminales. • Optimizado para alta velocidad. • Conexiones sencillas y baratas. • Diseñada especialmente para la comunicación entre los sistemas de control de automatismos y las entradas/salidas distribuidas. • PROFIBUS FMS (Fieldbus Message Specification). Para comunicación entre células de proceso o equipos de automatización. La evolución de Profibus hacia la utilización de protocolos TCP/IP para enlace al nivel de proceso hace que este perfil esté perdiendo importancia. • Solución general para tareas de comunicación a nivel de célula. • Gran rango de aplicaciones y flexibilidad. • Posibilidad de uso en tareas de comunicación complejas y extensas. Medio Físico La tecnología de transmisión más usada es la RS 485, conocida habitualmente como H2. Su área de aplicación comprende aquellas aplicaciones donde prima su simplicidad, la velocidad de transmisión y lo barato de la instalación. Se usa un par diferencial con cable trenzado, previsto para comunicación semi-duplex, aunque también puede implementarse con fibra óptica y enlaces con estaciones remotas vía módem o vía radio. La velocidad de transmisión varía entre 9.6Kbits/s y 12Mbits/s. Al conectar varias estaciones, hay que comprobar que el cable de las líneas de datos no sea trenzado. El uso de líneas apantalladas es absolutamente esencial para el logro de una alta inmunidad del sistema en ambientes con emisiones altas de electromagnetismo (como en la fabricación de automóviles). El apantallamiento se usa para mejorar la compatibilidad electromagnética (CEM). Bus El elemento esencial del bus es el nodo. PROFIBUS prevé la existencia de dos tipos de nodos: • Activos: son nodos que pueden actuar como maestro del bus, tomando enteramente el control del bus. • Pasivos: son nodos que únicamente pueden actuar como esclavos y, por tanto, no tienen capacidad para controlar el bus. Estos nodos pueden dialogar con los nodos activos mediante un simple mecanismo de pregunta-respuesta, pero no pueden dialogar directamente entre sí. Aparte de estos dos tipos de nodos, existen otros dos bloques esenciales en la arquitectura del bus: • Expansiones E/S: este tipo de bloques constituyen la interfaz con las señales de proceso y pueden estar integrados tanto en un nodo activo como en un nodo pasivo. • Repetidores: los repetidores ejecutan el papel de simples transceptores bidireccionables para regenerar la señal. Su diferencia esencial con los estudiados en el caso del BITBUS es que no se requieren señales de control (RTS+, RTS-) para conmutar el sentido de la línea de datos, ya que el sistema de codificación en PROFIBUS es del tipo NRZ (por niveles) y las velocidades son más bajas. Características de las redes PROFIBUS • La misma topología, protocolo y estructura de red. • Adaptación a diferentes baudrates, desde 9,6Kbits/seg hasta 12Mbits/seg, permiten adaptar la comunicación a cada requisito tecnológico. • Enorme capacidad de procesamiento de diagnóstico. • Adaptación a diferentes medios como fibra óptica (para largas distancias o ambientes con perturbaciones), cable de cobre en RS485 o para entornos Ex (con riesgos de explosión) donde se requiere enviar la energía por el mismo cable de señal. • Reconfiguración online sin caída del maestro y reemplazo con energía. • Independiente de marca: cualquier componente de cualquier marca puede hablar con otro que adhiera al estándar PROFIBUS. Conclusiones: Aunque a lo largo del trabajo se dio la impresión de que los estándares industriales compiten comercialmente con los estándares de datos, esto no es del todo cierto. Si bien es cierto que por simplicidad y difusión tecnológica se está tratando de aplicar estándares de datos en el control industrial, lo cierto es que tanto los actuales estándares industriales como los de datos encuentran su lugar en las redes industriales. No toda la información es utilizada siempre para el control de la planta sino que muchas veces se utiliza a título informativo, es en esos caso cuando se puede aplicar perfectamente los estándares de datos y es por eso que existen muchas soluciones tecnológicas para lograr la interacción de las redes industriales con las redes de datos. Cuando uno piensa en redes de datos suele pensar en 2 o tres estándares muy difundidos y en pos de eso suele quitarle importancia a otras tecnologías ya en desuso (Token Ring, TDMA). El error radica en pensar exclusivamente las redes en función del transporte de datos digamos triviales en comparación con lo visto en este trabajo. En cuanto a la gran diversidad de protocolos y estándares industriales, se puede decir que buscan alcanzar una meta inalcanzable. Como en todas las soluciones de ingeniería siempre está el compromiso de fondo es necesario buscarlo, teniendo en cuanta que en este ambiente las fallas pueden tener repercusiones muy severas. Anexo RS-422 El RS-422 conocido originalmente como EIA-422 es un interfaz o sistema de comunicación serie que consiste en 4 hilos con transmisión full-duplex y línea diferencial. Permite conectar más de un dispositivo a la línea de transmisión. La comunicación diferencial permite una mayor velocidad que el RS-232 permitiendo hasta 10Mbits/seg. Cuando solo se usan 2 hilos en half-duplex line se denomina EIA-485 o RS-485. La longitud máxima del cable son 1200 metros. No puede implementar una autentica red multipunto, como si hace el RS-485 pero sí permite que un ordenador controle por el mismo bus hasta 10 dispositivos. RS-485 El Estándar RS-485 La norma RS-485 está siendo la aplicación fundamental para conexiones multipunto en la industria. La RS-485 es la única que permite una red de nodos múltiples con comunicación bidireccional con un solo par de cables trenzados, no todos los estándares combinan esta capacidad con el buen rechazo al ruido, con excelente velocidad de transmisión de datos, con gran longitud del cable de interconexión, y la robustez general del estándar. Por estas razones, existe una gran variedad de uso de las aplicaciones con RS-485 para la transmisión de datos entre aparatos en sectores como: • • • • • • • Automoción Informática Robótica Repetidores celulares Fabricantes de PLCs Fabricantes de Sinópticos Etc. Aunque la RS-485 es sumamente popular, los fabricantes de productos que quieren incorporar esta norma, deben aprender y comprender los problemas de la interconexión con la RS-485. La RS-485 es de bajo coste, bidireccional, multi-punto, interconexión con fuerte rechazo del ruido, buena tasa y rapidez de transmisión de datos, alta velocidad en la transmisión de datos y un rango del modo común ancho. La norma especifica las características eléctricas de transmisores y receptores para la transmisión diferencial multi-punto de datos, no hace referencia ni especifica el protocolo, si el código, las características mecánicas del conector y las conexiones de los pines (pinout). La EIA (Electronic Industries Association) Technical Recommendation ermin TR30, especificó la norma RS-485 en el año 1983. La Telecommunitcations Industry Association (TIA) es ahora la responsable para las revisiones futuras. La RS-485 se está revisando actualmente, en su revisión y después de una votación la norma revisada pasará ha llamarse “ANSI TIA/EIA-485-A”. Conceptos técnicos Existen, por lo menos, 10 conceptos técnicos que se deben repasar antes de aplicar la norma, que son: • • • • • • • • • • La forma de los nodos Las configuraciones La media de erminal ctares Velocidad de los datos y la longitud del cable Terminales y adaptadores Diferencial único y parámetros de RS-485 Blindajes y tierras Modo de protección Especial-función transmisor-receptor Relación fallo-seguridad La forma de los Nodos El estándar RS-485 permite su uso en redes múltiples de gran velocidad si tenemos en cuenta las siguientes recomendaciones: 1. Cada bus o red no debe tener más de 32 cargas. 2. El control direccional de los repetidores es complejo, pero se puede solucionar por hardware, por consiguiente, una estimación algo conservadora es que, sin usar los transceptores especiales, una red puede incluir 32 transceptores. Datos Técnicos ESPECIFICACIONES Modo de trabajo Número Total de Emisores y Receptores en Una Línea Máxima Longitud del Cable Velocidad Máxima de transmisión de Datos Tensiones Máximas de Salida Nivel de la Señal de Salida (Carga Min.) Con Carga Nivel de la Señal de Salida (Carga Max.) Con Carga Resistencia de Carga (Ohms) Max. Corriente en Estado Z Alto Alimentación conectada Max. Corriente en Estado Z Alto Alimentación desconectada RS-485 Diferencial 1 EMISOR 32 RECEPTORES 4000 FT. (1.200 m.) 10 Mb/s -7V a +12V +/-1.5V +/-6V 54 +/-100µA +/-100µA Velocidad de Cambio (Max.) Tensiones de entrada del Receptor Sensibilidad de entrada del Receptor Resistencia de entrada del Receptor (Ohms) N/A -7V a +12V +/-200mV >=12k min. Instalación y Conexionado Para la instalación del bus RS-485 debemos tener en cuenta las siguientes consideraciones: • Longitud máxima del bus RS485: 1200 m aprox. (sin amplificadores). Para mas distancias, es posible utilizar amplificador, que regenera y amplifica la señal. • Cable a utilizar: Se pueden instalar buses RS-485 usando cable de pares trenzados. La impedancia característica del cable puede variar entre 100 o 120ohm. Es recomendable la utilización de cable UTP cat.5 o superior. • Evitar el paso del bus cerca de cables y equipos de potencia, ya que estos producen inducciones electromagnéticas que pueden provocar mal funcionamiento en el sistema y en algunos casos incluso la avería de los equipos. • El bus RS-485 es un bus serie, nunca instale los equipos en estrella o anillo. El estándar RS-485 es el único que permite que múltiples nodos se comuniquen bidireccionalmente sobre un único par de cables. Ningún otro estándar combina esta capacidad con un equivalente rechazo de ruido, longitud de cable y, en general, robustez. Es necesaria una buena interconexión de los equipos como indica el siguiente esquema: Norma de comunicación TIA/EIA-232-E Norma RS-232 El estándar RS-232 es una de las normas de comunicación serie asíncrona más popular y es ampliamente aceptada en la industria. Esta norma es utilizada para la comunicación entre modems, impresoras, ordenadores, etc. Fue definida como estándar por la Asociación de Industrias Electrónicas (EIA) y la letra final de su denominación indica la versión. La RS-232 toma en cuenta las características mecánicas, eléctricas, funcionales y de procedimientos típicos de un protocolo orientado al enlace físico punto a punto. Este estándar se basa en comunicación asíncrona, es decir, los datos pueden ser transmitidos en cualquier momento, por lo que deben tomarse precauciones para sincronizar la transmisión con la recepción. La Transmisión En la transmisión bit a bit la línea se mantiene en estado latente (no transmisión) y el envío de la información se realiza enviando un bit de inicio (siempre en nivel bajo), seguido de 5,6,7,u 8 bits de datos, un bit adicional de paridad y 1, 1.5 o 2 bits de parada. Esta secuencia permite reconocer el inicio de la transmisión, los datos, así como la integridad de la misma y la finalización del envío. Para que dos dispositivos puedan hacer efectivo el intercambio de información se requiere, además, que cada una de ellos utilice las mismas características de transmisión, entre estas características están la velocidad que pueden ser de: 110 bps, 300 bps, 600 bps, 900 bps, 1200 bps, 2400 bps, 4800 bps, 9600 bps, 19200 bps. Estas velocidades han sido ampliadas en la versión RS-232-E. El Puerto RS-232 El estándar establece además las características físicas y mecánicas del conector, el tipo de dispositivo (emisor o receptor), las características eléctricas de la conexión y los mecanismos de sincronización de la comunicación. El conector es un DB25 (conector de 25 contactos), aunque en la práctica se suele utilizar un DB9, en los que están definidos cada uno de los contactos dependiendo del tipo de dispositivo. El DTE (Equipo erminal de Datos) lleva instalado el conector macho y el DCE (Equipo de Comunicación de Datos) dispone del conector hembra. Subir Referencias: • • • • • www.CAN-CIA.org www.profibus.org www.automatas.org Modbus Application Protocol - www.modbus-IDA.org Modbus Messaging Implementation Guide V1.0a -www.modbusIDA.org • Comunicaciones Industriales, Profesor Manuel Jiménez Buendía, Universidad Politécnica de Cartagena, Dpto. de Tecnología Electrónica • Tema 9: REDES LOCALES EN ENTORNOS INDUSTRIALES. BUSES DE CAMPO- Ingeniería de Sistemas y Automática, Universidad de Oviedo • ANALISIS DEL ESTADO DEL ARTE DE LOS BUSES DE CAMPO APLICADOS AL CONTROL DE PROCESOS INDUSTRIALES,Dr. Ing. Héctor Kaschel C. e Ing. Ernesto Pinto L., Fac. de Ingeniería, Depto. de Ingeniería Eléctrica ,Universidad de Santiago de Chile E-mail: hkaschel@lauca.usach.cl e.pinto@ieee.org