¿CÓMO SE UTILIZA ESTE LIBRO?
Anuncio

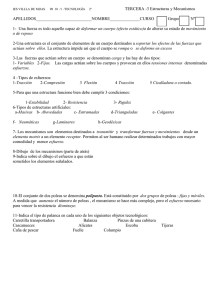
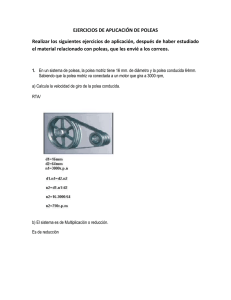
¿CÓMO SE UTILIZA ESTE LIBRO? 4 PRESENTACIÓN DE LA UNIDAD De manera didáctica y amena, se definen brevemente los conceptos que vamos a estudiar, además se presentan unas cuestiones iniciales que establecen los conocimientos básicos para afrontar el desarrollo y aprendizaje de la materia y un esquema de los contenidos de la unidad. Se parte de conocimientos generales para alcanzar los más complejos. ¿Recuerdas qué es…? • ¿Sabrías identificar una excéntrica y una leva? • ¿Qué se entiende por aparejos y polipastos? • ¿Podrías citar tres operadores mecánicos que transformen el movimiento circular en rectilíneo? 1. Manivelas. 2. Cigüeñales y bielas. 3. Excéntricas y levas. 4. Poleas. 5. Otros sistemas de transmisión y transformación de movimiento. 5 A 6 cm 6 0 18 12 CÓMO SE USA EL CD Material de apoyo al estudio y conocimiento de la materia. Contiene entre otros: animaciones, actividades relacionadas con los contenidos del libro, presentaciones, resúmenes que sirven de guía para el desarrollo de la materia y software relacionado con la materia (Crocodile 3D). Muchos de los operadores mecánicos utilizados por el ser humano son capaces de transmitir y transformar el movimiento de forma simultánea, como ocurre con los cigüeñales y bielas, levas, piñones y cremalleras, etc. Del mismo modo, algunas de estas máquinas se han diseñado con objeto de multiplicar el esfuerzo que sobre ellas se realiza, como es el caso de las poleas, aparejos, etcétera. Los contenidos de esta Unidad son: DESARROLLO DE LA UNIDAD Las unidades desarrollan los contenidos a través de las imágenes, prácticas y experiencias. Se utilizan diagramas de flujo, recuadros de «Recuerda» y «Sabías que...», consejos, normas de comportamiento en el aula y en el taller, lecturas complementarias, prácticas, actividades y resúmenes que facilitan la asimilación de la materia. MECANISMO DE TRANSMISIÓN Y TRANSFORMACIÓN DE MOVIMIENTO 01 5 4 6 cm 6 cm Fig. 5.13 Sistema de transmisión simple por correas. ECUACIONES DE EQUILIBRIO EN SISTEMAS DE TRANSMISIÓN ENTRE POLEAS Si observas detenidamente la Figura 5.13 y la comparas con las ruedas de fricción anteriores, comprobarás cómo ambos sistemas se pueden considerar idénticos. Lo único que los diferencia es que, en este caso, las poleas, al encontrarse alejadas, se unen mediante una correa de transmisión, de esta forma, al ser los diámetros de las poleas idénticos a los de sus tambores asociados, cada vez que la polea motriz de una vuelta, la polea receptora dará 1/4 de vuelta. Esta situación provoca que la correa de transmisión y ambos contrapesos, situados en los extremos de las cuerdas arrolladas en los distintos tambores, se desplacen 6 cm. Con esta experiencia se demuestra que ambas poleas poseen la misma velocidad lineal; es decir, cada una de ellas recorre linealmente la misma distancia. Esto hace que las longitudes recorridas por ambas poleas se puedan igualar, obteniéndose nuevamente la ecuación de equilibrio del sistema, cuya expresión y consideraciones son idénticas a la que conseguimos antes para las ruedas de fricción. π · d1 · n1 = π · d2 · n2 n2 d1 d1 Simplificando obtenemos: ] =] o lo que es lo mismo n2 = ] · n1 n1 d2 d2 Caso práctico En una transmisión simple se desea conocer el número de vueltas por minuto de la polea receptora conocidos los diámetros de sus poleas (motrices y receptora), así como las revoluciones del motor. Si aplicamos la ecuación de equilibrio del sistema y seguimos los pasos descritos obtenemos el resultado de 20 rpm (revoluciones por minuto). d1 = 2 mm n1 = 1 000 vueltas / minuto Fig. 5.14 n2 = ¿? d2 = 100 mm Transmisión simple de reducción. Este sistema de transmisión simple tiene como limitación el que en aquellos casos en los que se desea conseguir una fuerte reducción, ésta no se puede lograr en una sola etapa, ya que el tamaño, peso y precio desproporcionado que una transmisión de estas características podría alcanzar, la hacen totalmente inviable. Por este motivo en la industria (o nosotros mismos a la hora de realizar nuestras construcciones) se utilizan, con cierta frecuencia, transmisiones de movimiento en varias etapas. La transmisión propuesta tiene una relación de transmisión: 66 2 n2 = — — — · 1 000 100 Aquéllas formadas por la unión de varias transmisiones simples; de esta forma se consigue en poco espacio fuertes reducciones de velocidad, al tiempo que se aumenta la potencia transmitida. d2 = 50 mm 4 2 En la Figura 5.15 se ha representado la transmisión de un movimiento en dos etapas, en ella se aprecia cómo el mecanismo está constituido en realidad por la asociación de dos transmisiones simples. n1 = 1000 rpm d1 = 5 mm d4 = 48 mm ¿n4? 3 d3 = 12 mm En la primera transmisión formada por las poleas de diámetros d1 y d2 se puede observar cómo la polea motriz de diámetro d1 = 5 mm gira a 1 000 rpm, movimiento que, a través de la correa, es transmitido a la polea número 2 de diámetro d2 = 50 mm, imprimiendo en esta última una velocidad de giro n2 que en el ejemplo propuesto toma el valor de 100 rpm. Observa cómo el valor obtenido cumple la ecuación general de equilibrio de una transmisión simple. Segunda transmisión (poleas 3 y 4) 1 n2 = n3 = 100 rpm Primera transmisión (poleas 1 y 2) Fig. 5.15 Sistema de transmisión del movimiento por correas en dos etapas. n2 d1 d1 =] A n2 = ] · n1 ] n1 d2 d2 En la segunda transmisión nos encontramos con las poleas de diámetros d3 y d4, siendo la polea n.º 3 la motriz (polea de la que parte el movimiento), mientras que la polea receptora es la n.º 4. Por otro lado, y debido a que las poleas n.º 2 y n.º 3 se encuentran unidas solidariamente en el mismo eje, se cumple que ambas giran a la misma velocidad; es decir: n2 = n3 (en nuestro ejemplo n2 = n3 = 100 rpm) Tercera transmisión (poleas 5 y 6) Segunda transmisión (poleas 3 y 4) Primera transmisión (poleas 1 y 2) d5 Aplicando la ecuación de equilibrio se obtiene una expresión idéntica a la primera, pero con los subíndices de las poleas que intervienen en este caso (comprueba cómo, en el ejemplo de la figura, si se sustituyen éstos por los valores propuestos se obtiene un resultado de 25 rpm). Eje n.º 2 d3 Eje n.º 1 n11 dd11 d d4 3 ·n n4 = ] 2 Fig. 5.16 Empleando el mismo motorcillo es posible elevar cargas cada vez mayores, siempre que se sitúen en ejes que posean una reducción apropiada. Si en esta ecuación se sustituye n2 por la expresión resultante en la primera transmisión, se obtiene la relación de transmisión del sistema propuesto. d d4 d d4 Eje n.º 3 d6 d4 d2 d ·d d2 · d4 d d2 1 3 3 3 1 n4 = ] · n2 = ] ·] · n1 A ordenando A n4 = ] · n1 d1 n2 d1 2 — — —=— — —— — —=— — — d2 n 1 d2 100 De esta forma, y generalizando para cualquier transmisión de movimiento en varias etapas, se obtiene la expresión: Despejando y sustituyendo los valores tendremos: d1 n2 = — — — · n1 d2 Para saber más TRANSMISIÓN DEL MOVIMIENTO EN VARIAS ETAPAS d ·d …d d2 · d 4 … dn n2 = 20 vueltas/minuto Empleando la relación de transmisión anterior se puede observar cómo la polea motriz ha de tener un diámetro muy pequeño, mientras que la polea receptora ha de adoptar dimensiones gigantescas, ya que la relación entre sus diámetros es de 2/100, es decir, de 1/50. 1 3 (n–1) nn = ]] · n1 n2 = 20 vueltas / minuto Una de las características que presentan las relaciones de transmisión de movimiento por etapas, es la posibilidad de aumentar la potencia que es capaz de transmitir un sistema. 67 8 EXPERIENCIAS Prácticas desarrolladas En los siguientes apartados se proponen varios ejemplos desarrollados para que, a través de su análisis, puedas familiarizarte con el programa, a la vez que practicas con las funciones básicas de este tipo de aplicaciones. El método de trabajo que se plantea consiste en que reproduzcas los ejemplos propuestos, los cuales te permitirán, simultáneamente, profundizar en el bloque de Técnicas de expresión y comunicación y Electricidad. Posteriormente, y una vez concluidas las actividades planteadas, deberás elaborar los ejercicios propuestos, especialmente los planteados en el cuaderno de trabajo, y aquellos que tu profesor te proponga. Finalmente, ya estarás preparado para resolver y comprobar, a través de sencillas simulaciones, cuantos diseños quieras incorporar en tus maquetas y prototipos. Recuerda que vamos a utilizar el programa, Crocodile Clips, pero podríamos haber utilizado cualquier otro programa, ya que los principios en los que se basan suelen ser comunes a todos ellos. 8 Selecciona de la Barra principal, el botón Salidas de luz 9 Haz clic sobre el botón Luz de señal y, por arrastre, sitúa el operador en lugar del Área de trabajo que desees. . 8 Ya tenemos los operadores. Ahora nos queda unirlos con los conductores apropiados, para ello deberás: 10 9 Con el botón izquierdo del ratón, haz clic sobre el extremo del operador en el que desees conectar el conductor. En ese momento surge una bobina de hilo que, al desplazarte por el área de trabajo, irá «extendiendo» un conductor, hasta que llegues al otro extremo del operador que deseas conectar. Sólo tendrás que hacer clic y tendrás ambos operadores conectados. Se componen de prácticas a realizar para la asimilación de conocimientos teóricos adquiridos en cada unidad. 10 Nota: Cada vez que quieras efectuar un cambio de dirección, deberás hacer clic con el botón izquierdo del ratón. Simulación del circuito 11 Para simular y comprobar el funcionamiento de nuestro circuito únicamente deberemos accionar el operador de maniobra que, en este caso, es el interruptor. Podrás comprobar cómo se enciende la lámpara de nuestro circuito. 12 Finalmente, salva este ejercicio con el nombre de Elect-1. A. Simulación de circuitos eléctricos 1 Experiencia 1 2 11 Lampara gobernada a través de un interruptor, (continuación). Fig. 8.6 • Lámpara gobernada a través de un interruptor Siguiendo los pasos descritos en el apartado anterior: 4 Entra en el programa de aplicación Crocodile . Clips 2 Selecciona de la Barra principal, el botón Suministros de Energía . 3 Haz clic sobre el botón Pila y, arrastrando, sitúa el operador en lugar del Área de trabajo que desees. Para eso deberás: 1 Abrir el menú Archivo. 4 Pulsa el botón Volver a la barra principal regresa a la barra principal. 2 Seleccionar Guardar como. 3 5 Selecciona, de la Barra principal, el botón Interruptores . Indicar el lugar donde quieres guardar el archivo. 4 Especificar el nombre del archivo (en este caso Elect-1). 5 Hacer clic en Aceptar. 3 5 7 6 6 Fig. 8.5 7 Lámpara gobernada a través de un interruptor. Cómo guardar ejercicios realizados con Crocodile Clips El proceso para salvar un ejercicio con este programa es similar al que debemos realizar con cualquier otro programa que trabaje bajo Windows. De esta forma podrás asignar a tus diseños el nombre y la dirección que mejor se adapten a tus necesidades, facilitándote así su identificación o, simplemente, para visualizarlos si así lo deseas. 1 y Haz clic sobre el botón Interruptor unipolar de una vía . Ahora, por arrastre, sitúa el operador en el lugar deseado. 1 2 5 4 Pulsa nuevamente el botón Volver a la barra principal y regresa a la barra principal. 98 Fig. 8.7 13 3 99 Guardar ejercicios realizados con Crocodile Clips. PROYECTOS PROYECTOS CON OPERADORES MECÁNICOS. AMPLIACIÓN IV PROYECTOS PARA CONSTRUIR En este apartado se proponen distintos proyectos para construir, así como los procedimientos, las técnicas y los detalles más importantes para facilitarte su construcción. No es necesario que construyas todos los proyectos propuestos. Tu profesor será quien seleccione y establezca el orden en el que debes realizarlos. PROYECTOS CON OPERADORES MECÁNICOS DE TRANSMISIÓN Y TRANSFORMACIÓN DE MOVIMIENTOS • PROPUESTA I. PROYECTO CON BIELAS, CIGÜEÑALES Y RUEDAS EXCÉNTRICAS. PARQUE INFANTIL Teniendo en cuenta los detalles constructivos propuestos en esta Unidad y con un poco de imaginación, paciencia, habilidad y combinando adecuadamente distintos operadores (bielas, excéntricas, balancines, cigüeñales...), podrás diseñar, construir y automatizar fácilmente un parque infantil. Observa que en el diseño propuesto hemos utilizado principalmente el alambre y el contrachapado para construir los distintos operadores, si bien, por la dificultad que entraña el proyecto, tal vez sea interesante que en algunos casos utilices operadores comerciales. Consulta esta posibilidad con tu profesor. • PROPUESTAS 1 Y 2. PROYECTOS CON BIELA Y CORREDERA Ensamblamos todos los conocimientos adquiridos en todas las unidades, trasladándolos en la realización de un proyecto real donde se ve la utilidad global del estudio de todo lo aprendido en cada una de las unidades. Bielas de alambre Con un poco de imaginación y combinando adecuadamente el operador biela con otros dispositivos podrás diseñar y construir divertidos mecanismos. Biela Hilo Muelle Hembrilla Interruptor de clic-clac Corredera oscilante • PROPUESTAS 3 Y 4. PROYECTOS CON BIELA Y LEVA • PROPUESTA II. PROYECTO CON REDUCTORA. PUENTE LEVADIZO El análisis del proyecto te permitirá obtener los detalles necesarios para que, una vez adaptados a tus necesidades, puedas realizar la construcción de un puente levadizo similar al modelo que te presentamos. Biela Leva Esquema eléctrico Interruptor de marcha 172 El análisis detallado de cada una de las propuestas te permitirá obtener los datos necesarios para realizar su construcción. 173 ACTIVIDADES Del cuaderno de trabajo Realiza las actividades correspondientes a esta Unidad denominadas «Simuladores» propuestas en tu cuaderno de trabajo. ACTIVIDADES FINALES 8 De grupo 01 Realizad una ficha técnica explicando los distintos operadores que surgen al pulsar el botón Interrupsituado en la Barra principal. Clasificadas por tores categorías y por la función que realizan. Búsqueda de información Busca información y realiza un trabajo sobre algún programa industrial empleado actualmente para efectuar la simulación de circuitos a través del ordenador. 02 Pulsad el botón Componentes de entrada situados en la Barra principal y proceded a identificar los operadores que muestra el sistema, a través de sus botones, al ejecutar esta acción. Al final de la unidad, se dispone de preguntas ordenadas por grado de dificultad, de cara a conocer la asimilación de contenidos, tanto de forma teórica como práctica; individual o colectiva. Diseño y simulación de circuitos y prototipos con Crocodile Clips Utilizando un ordenador y el programa Crocodile Clips, realiza el diseño de los circuitos y prototipos siguientes: 01 Se desea dotar de movimiento giratorio alternativo a una noria. El sistema dispondrá de un interruptor general de parada, un interruptor inversor de giro y dos pulsadores de marcha, uno para el sentido de giro a izquierdas y el otro para el giro a derechas. 02 Unos alumnos han construido el prototipo de un semáforo que funciona manualmente y desean comprobar si pueden simular el automatismo de encendido empleando dos conmutadores. 03 Identifica y describe, en cada uno de los casos, cómo se encuentran asociados y el comportamiento previsible de los distintos receptores al actuar sobre los elementos de maniobra representados. Finalmente, emplea el programa Crocodile Clips para reproducirlos y comprobar si tus hipótesis son correctas. a) b) d) c) e) 105