Determinación de la Distancia de un Objeto Empleando un
Anuncio

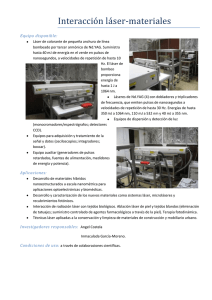
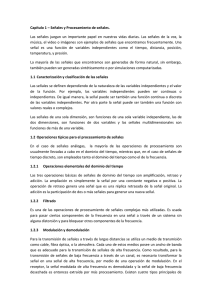
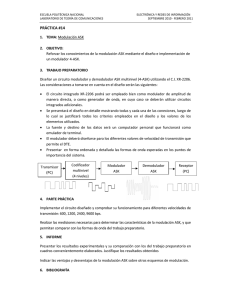
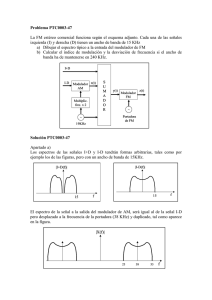
Encuentro de Investigación en IE, 5 — 7 de Abril, 2006 Encuentro de Investigación en Ingeniería Eléctrica Zacatecas, Zac, Abril 5 — 7, 2006 DETERMINACION DE LA DISTANCIA DE UN OBJETO EMPLEANDO UN LASER DE PULSOS Determinación de la Distancia de un Objeto Empleando un Láser de Pulsos Noé Villezcas Armendáriz Miguel A. Álvarez Cabanillas Centro de Investigación y Desarrollo de Tecnología digital – Instituto Politécnico Nacional Av. del Parque No. 1310 Mesa de Otay, Tijuana Baja California, México, C.P. 22518 TEL +(664) 6237069, ext. 82833, correo-e: nvillezcas@citedi.mx, malvarez@citedi.mx Resumen — En este trabajo se desarrolló el estudio de la determinación de la posición de un objeto empleando pulsos luminosos. Para la detección se emplearon códigos Barker de longitud once. La distancia se obtuvo mediante la correlación de la señal transmitida y la señal recibida. Se empleo la modulación DPSK para la transmisión de la información. Para modular la información se emplea el modulador Mach-Zehnder haciendo uso del efecto electro óptico. Se calculó la atenuación de la señal debido a la dispersión en la atmósfera. Abstract — A study of a technique is developed to detect position of some object using optical pulses. Barker codes are employed to detection, distance is measured correlating transmitted signal and receiver signal. DPSK modulation is used to transmit information. To modulate data a Mach-Zhender Modulator based on electro-optic effect is used. Scattering attenuation is calculated and presented. Palabras clave --- Cálculo distancia, Código Barker, Lidar, atenuación, Radar Láser. I. INTRODUCCION L OS sistemas actuales usados para realizar la medición de distancias de un objeto, usan técnicas basadas en LIDAR (Light Detection and Ranking). Estas técnicas tienen como principio fundamental el uso de algún dispositivo óptico para la detección de la posición. Los dispositivos ópticos pueden ser un láser o un diodo emisor de luz infrarroja. Existen varios métodos de medición que se han desarrollado para la estimación de dichas distancias, muchos de estos métodos se basan en la modulación de la potencia óptica. Para este tipo de técnica el láser es la mejor opción. Una manera de llevar a cabo la determinación de la distancia es midiendo el tiempo que le toma a la señal viajar desde que sale del transmisor, golpea con el objeto y es interceptada por el receptor. Esta técnica es llamada medición de tiempo de vuelo por pulsos (TOF, Time of-flight). Esta técnica de medición por tiempo de vuelo tiene aplicaciones específicas en la industria como: medición de niveles en silos y contenedores, caracterizar una superficie [1], todo esto además de la medición de distancias. En la medición de distancias empleando láser, se aplican 2 principios fundamentales. El primero de ellos es el de medición por medio de pulsos, mencionado anteriormente. El segundo es el de medición de distancias en base a la diferencia de fase que existe entre la señal transmitida y la señal reflejada por la superficie del objeto bajo estudio[2]. En la mayoría de los sistemas actuales se usa principalmente la medición por medio de pulsos. II. ATENUACION DE LA SEÑAL La transmisión de señales electromagnéticas a frecuencias ópticas a través de la atmósfera (Propagación en espacio libre), se ve afectada por la atenuación que sufre la señal debido a varios factores. En esta sección calculamos las pérdidas que sufre la señal debido principalmente a: 1 176 Encuentro de Investigación en IE, 5 — 7 de Abril, 2006 aerosoles a una altura h sobre el nivel del mar ( m -3 ). Obtenemos el coeficiente de extinción atmosférica, BT , hasta una altura máxima de 30 Km. sobre el nivel del mar. Se calcula hasta esta altura acuerdo al modelo de la ITU [3]. En esta altura deja de ser considerable la dispersión de Rayleigh. Pérdidas por dispersión: la dispersión de la señal en la atmósfera de debe a la redirección de la energía debido a las partículas presentes a lo largo de la trayectoria de la señal. Este tipo de fenómeno se presenta cuando el tamaño de las partículas presentes en la atmósfera es equivalente a la longitud de onda de la señal incidente. Dependiendo de la relación entre el diámetro de la partícula y la longitud de onda se clasifica el tipo de dispersión presente. La dispersión de Mie se presenta cuando el diámetro de las partículas presentes en la atmósfera es comparable, o igual en tamaño a la longitud de onda de la señal electromagnética incidente. Es causada principalmente por las partículas de agua suspendidas en la atmósfera.La dispersión de Rayleigh se presenta cuando el tamaño de las partículas presentes a lo largo de la trayectoria de la señal, tienen un diámetro menor que la longitud de onda de la señal electromagnética incidente. Este tipo de dispersión ocurre debido a la interacción entre la señal y los gases atmosféricos. BR (h) = σ R nR (h) x103 Km -1 (1) σ R es la sección transversal de la dispersión de Rayleigh ( m 2 ), nR (h) es el numero de densidad atmosférica ( m -3 ). Estos coeficientes se encuentran reportados de manera experimental en tablas dentro de la recomendación de la ITU-R 1622 [3]. Los coeficientes varían con respecto a la longitud de onda de la señal y a la altura. Ahora obtenemos el coeficiente de la dispersión de Mie de la siguiente manera : BA ( h) = BA (0)nA (h) nA (0) Km -1 (2) BA (0) es el coeficiente de dispersión por aerosoles ( Km -1 ), nA (h) es el numero de densidad por Km -1 (3) Ahora obtenemos el coeficiente de relación de extinción Q de la siguiente forma: Q= 30 ∑ B (h)∆h h = ho (4) T Y por último calculamos la atenuación total debido a la dispersión, α: α= 4.3429 Q sin θ dB/Km (5) A continuación se muestra la grafica de la atenuación, con el parámetro ajustado de ángulo de elevación = 75*. 10 Atenuacion especifica (dB/Km) El modelo para calcular la atenuación especifica debido a este tipo de perdidas esta basado en las recomendaciones de la ITU[3]. Este modelo es válido para frecuencias entre 20 THz y 375 THz. Los parámetros requeridos para este modelo son: La longitud de onda de la señal (λ en µ m) el ángulo de elevación ( θ ) y la altura sobre el nivel del mar ( hE en Km.). Primero obtenemos los coeficientes de la dispersión de Rayleigh, con incrementos en la altura de 1Km, de la siguiente forma: BT = BR (h) + BA (h) 10 10 10 10 Atenuacion de la senal debido a la dispersion 2 1 0 -1 -2 0.5 1 1.5 2 2.5 3 Longitud de onda (Micrometers) 3.5 Figura 1. Atenuación de la señal contra la longitud de onda. III. ECUACION DEL RADAR LASER En esta sección se describen los parámetros que se toman en cuenta al momento de la recepción de la señal de acuerdo a la formula del radar láser. 4 Encuentro de Investigación en IE, 5 — 7 de Abril, 2006 La ecuación del Radar Láser nos muestra que la potencia recibida es función de la potencia transmitida, de la reflectividad que presenta el objeto, la longitud de onda a la que se esta operando, el tamaño de la apertura de la antena, en este caso la divergencia del haz, y de las perdidas debido a la propagación de la señal así como a las perdidas que presenta el sistema[4]. La ganancia en la apertura del transmisor puede ser expresada por el ángulo solidó en esteradianes del ancho del haz del transmisor ( (θT ) 2 . Esta ecuación solo es valida para el caso de la apertura en campo lejano. La región de campo lejano es conocida mediante la relación 2 D 2 / λ (Fraunhofer). Psig = Donde PT PT GT σ π D 2 α ⋅η SYS 4π R 2 4π R 2 4 (6) es la potencia transmitida (W), GT = 4π / θT2 es la ganancia de la antena transmisora (dB), θT = K a λ / D es el ancho del haz transmisor, R es la distancia a la cual se encuentra el objeto (m), D diámetro de apertura del receptor (m), σ = 4π ρT dA / Ω es la sección transversal del objeto RCS ( m 2 ), ρT es la reflectividad del objeto, dA es el área del objeto, Ω es el ángulo sólido de dispersión del objeto, α y η SYS son las perdidas debido a la propagación de la señal y perdidas debido al sistema. IV. RELACION SEÑAL A RUIDO (S/R) Este parámetro nos indica la relación que existe entre la potencia de la señal reflejada con respecto al ruido. Este parámetro S/R nos ayuda a saber que tanta potencia es la mínima que detectaremos de acuerdo a los parámetros de nuestro sistema. SN R = 2 S 2 Psig 4 kT B S N E P B + 2 q IB + R 2 (7) 2 Donde S es la eficiencia del detector (A/W), Psig es la potencia reflejada (W), k es la constante de Boltzman (1.381 x 10−23 J/K), B es el ancho de banda del sistema (Hz), T es la temperatura absoluta, NEP es la potencia equivalente de ruido y R la resistencia de carga. σR = c 2 B 2 SNR (8) 177 Podemos conocer la exactitud de nuestro sistema por medio de la ecuación anterior. V. MODULACIÓN En esta sección se describe el tipo de modulación que se emplea para transmitir la información. Existen 2 métodos de modulación principales en este tipo de sistemas. Uno de ellos es la modulación directa del trasmisor, que consiste de un láser y su controlador. En este tipo de modulación una trama de datos es directamente modulada por el controlador del láser, mientras este láser emite una salida en respuesta a los niveles lógicos ‘1’ o ‘0’. Una gran variedad de esquemas de modulación se han empleado, siendo el más usado el esquema de modulación directa de la intensidad de la luz por datos, llamado encendido-apagado (OOK, on-off Keying). Este a su vez puede tomar 2 formas: con regreso a cero (RZ) y sin regreso a cero (NRZ). En la forma RZ el ancho del pulso de la señal óptica es menor que su periodo de bit. En la forma NRZ el ancho del pulso óptico ocupa todo el periodo del bit. La desventaja que presenta este método es que conforme se incrementa la velocidad de transmisión y ancho de banda (ancho de pulso menor) aparecen oscilaciones en la señal. Estas oscilaciones causan el fenómeno conocido como ‘Chirping’, que es la dispersión de la señal, incrementando la taza de error de bit (BER). El otro método de modulación es el conocido como modulación externa, consiste de un láser, su controlador y un modulador externo. Este tipo de moduladores presentan una ganancia mayor y una baja figura de ruido, pero necesitan un láser más potente y una señal eléctrica para controlarlo. En este tipo de modulaciones el láser se mantiene con una salida constante (CW, onda continua). El modulador externo modula la intensidad de la señal óptica de acuerdo a un voltaje externo aplicado. Usando el método de modulación externa para lograr un mayor ancho de banda, entre otras características, se usa la modulación de tipo DPSK (Corrimiento de Fase Diferencial, Differential Phase Shift Keying). Aquí los datos primeros son codificados en una forma diferencial. En esta codificación los datos pasan a través de una compuerta lógica XOR (OR exclusiva). En esta compuerta la salida es conectada a una de las entradas, esta configuración hace la función de checar el bit 178 Encuentro de Investigación en IE, 5 — 7 de Abril, 2006 actual (b) y uno anterior (a). Después la salida es invertida. Guía de onda contactos Ein/2 V1(t) LiNbO3 Ein Eout bEin/2 Figura 2. Codificación datos en DPSK. La modulación DPSK puede ser generada usando un modulador Mach-Zehnder. Este tipo de modulador es el más popular para implementar la modulación de la intensidad óptica. Usa el efecto Electro-Óptico debido a que es fabricado con un material llamado cristal de Lithium Niobate (LiNb O3 ) que toma ventaja de su fuerte coeficiente electro óptico. Un parámetro importante dentro de este modulador es el voltaje Vπ , el cual es el voltaje necesario para hacer los cambios de fase en la señal óptica. Los datos a la entrada de este modulador deben de ser amplificados a 2 Vπ . Figura 3. generación de señal DPSK. La señal emitida por el láser A0 cos( wt − φ ) es insertada en el modulador por medio de una guía de onda donde a la entrada es separada en proporciones iguales en cada uno de los brazos. A lo largo de esta guía la fase de la señal óptica puede ser modulada aplicando un voltaje. Si las señales ópticas están en fase después de propagarse a través de estos brazos, la salida resulta en máxima intensidad, mientras que si se encuentran fuera de fase la intensidad en la salida es mínima. Debido a que los datos fueron codificados diferencialmente (Figura 2), un ‘0’ lógico es representado con un cambio de fase entre ‘0’ y ‘ π ’ entre los bits de datos consecutivos en la portadora de la señal óptica. No existe ningún cambio de fase entre bits consecutivos en la portadora para representar un ‘1’ lógico [5]. Figura 4. Modulador Mach-Zehnder. Donde Eout = Ein jπ v1 (t ) /Vπ e + be jπ v2 ( t ) / Vπ 2 (9) representa la potencia de salida de este modulador, FTMZ = cos( π 2Vπ (v1 (t ) − v2 (t )) e jπ ( v1 (t )+ v2 (t )) / 2Vπ (10) Esta fórmula representa la función de transferencia del modulador. Una de las principales ventajas que ofrece este sistema es que convierte las variaciones de fase a variaciones de intensidad. Siendo esto muy útil ya que mantiene la fase constate a lo largo de la trayectoria de la señal. Una forma de analizar las características de la señal que estamos generando es por medio del llamado diagrama de ojo. Las señales formadas de pulsos contienen cantidades de energía considerables en los armónicos. Esta energía es relacionada al tiempo de translación del pulso (rise and fall time) y a la duración del pulso. Tiempos de transición rápidos y duración de pulsos muy cortos crean armónicos con niveles de energía más grandes. Esto es indeseado en sistemas de comunicación causando varios problemas. En telecomunicaciones, un diagrama de ojos es una imagen de osciloscopio en la cual una señal digital en un sistema de transmisión es muestreada repetidamente y aplicada a la entrada vertical de dicho instrumento. Mientras tanto la tasa de datos es usada para disparar el barrido horizontal del osciloscopio. Figura 5. Trama de bits y su correspondiente diagrama de ojo (Eye Diagram). 179 Encuentro de Investigación en IE, 5 — 7 de Abril, 2006 En este diagrama analizamos la información más importante a cerca de la salida de la señal. La altura en la parte central de la apertura del ojo mide el margen de ruido, entonces, esta apertura vertical nos mide la calidad de la señal. Midiendo el grosor de la línea en la parte de arriba del diagrama se puede analizar la distorsión de la señal y el ruido puede ser analizado en la salida. La distancia de un objeto es determinada por medio del tiempo que tarda en viajar la señal electromagnética, desde que sale del dispositivo óptico, golpea con el objeto y regresa al receptor. Debido a que conocemos la velocidad a la cual se propagan las ondas electromagnéticas en el espacio libre 3 x108 m/s, podemos conocer el tiempo (t) que tarda la señal en recorrer cierta distancia R. Empleando la relación 2R/c (c = 3 x108 m/s) despejamos el factor (R) para obtener la distancia del objeto [2]: R= Figura 6. diagrama de ojo (Eye Diagram). En la modulación directa, se emplean pulsos de corriente que se suministran al láser para que este genere una salida como respuesta a estos impulsos. Este tipo de modulación no requiere ninguna codificación especial. Introducimos los datos que queremos modular directamente al sistema, estos pueden ser ya el código específico que deseamos. La única consideración aquí, es encontrar un acoplamiento entre los pulsos o datos que vamos a transmitir y el láser. Este acoplamiento sirve como modulador de la señal. Este método es el denominado encendido-apagado (OOK, On-off Keying) que mencionamos anteriormente. c ⋅t 2 (11) Los códigos Barker son un tipo especial de secuencia binaria óptima que se emplean para la compresión de impulsos de radar, ya que la función de auto correlación da lóbulos laterales pequeños. Mediante la modulación en fase podemos dividir un impulso en un número determinado de subimpulsos. Estos subimpulsos tienen todos la misma duración, y su fase vendrá determinada por un código específico. Los códigos empleados usualmente son binarios, lo que significa que solo hay dos fases diferentes, 0º y 180º. Los códigos binarios son secuencias de 0 y 1 ó 1 y -1 que vienen dados por la fase del subimpulso correspondiente. Existen diferentes longitudes de código Barker, estas son de 2, 3, 4, 5, 7, 11 y hasta 13 bits. Entre mayor sea la longitud de este código la correlación de la señal será maximizada. La función de correlación es máxima cuando el código transmitido y el código recibido son iguales. Figura 7. Salida del láser, modulado directamente, con una velocidad respuesta típica de 5 ns. Figura 8. Autocorrelación código Barker. VI. CALCULO DE LA DISTANCIA En esta sección se describe el método empleado para calcular la distancia de un objeto. Se emplean códigos Barker y se obtiene la correlación de la señal transmitida y reflejada para calcular la distancia. La correlación de una señal discreta se expresa de la siguiente forma: d (td ) = α ∑ s ( n) s ( n − t a =−α d ) (12) 180 Encuentro de Investigación en IE, 5 — 7 de Abril, 2006 Donde s(n) es la señal transmitida y s(n- td ) es la señal reflejada. avalancha. Los parámetros del laser se basaron en el dispositivo L7060-02 de Hamamatsu. 4 10 VII. RESULTADOS 3 10 Se desarrollo un programa y algoritmo para calcular el tiempo que le toma a la señal viajar desde que sale del transmisor y es detectada por el receptor. Para esto se calcula la correlación de la señal y se encuentra el tiempo de retraso. Los parámetros que caracterizan nuestro sistema fueron los siguientes: una potencia radiada de 3W, ancho de pulso de 100ns, el área del receptor de 7.0 mm 2 , la efectividad del receptor de 0.5 (A/W), una anchura del haz transmisor ( θT = 10o ), una reflectividad de 40% y una longitud de onda de 960nm. Consideramos 20dB de perdidas generales, empleamos el código barker de longitud 11, [1 1 1 1 -1 -1 1 -1 -1 1 -1]. Figura 9. Código Barker longitud 11. Obtenemos la correlación de la señal transmitida y reflejada empleando el código Barker descrito. Para este caso no se introdujo ningún error en la detección al momento de la simulación. Se puede observar que el nivel del lóbulo principal con respecto a los lóbulos secundarios es muy superior, siendo este de un nivel de 11, mismo numero de secuencias del código. Figura 10. Correlación de la señal Tx y Rx. La simulación se llevo a cabo dentro del laboratorio únicamente usando matlab. Los parámetros de recepción fueron basados en el dispositivo S2384 de Hamamatsu, que corresponde a un foto diodo de 2 10 ) B d( R N S 1 10 0 10 -1 10 0 10 1 10 Exactitud (cm) 2 10 Figura 11. Exactitud vs SNR. VIII. CONCLUSIONES Se calculó la distancia de un objeto utilizando códigos Barker y la correlación de la señal. Se plantearon los parámetros principales que conforman la detección de la distancia de un objeto empleando pulsos. Dependiendo de la precisión que se requiera tener, se emplea el método de modulación del láser, en este caso se consideró la modulación externa. Los códigos Barker facilitan el procesamiento de la señal ya que maximizan el lóbulo principal de la función de correlación, minimizando los lóbulos laterales. REFERENCIAS [1] Palojarvi P, Maaata J, “Integrated Time-ofFlight Laser Radar”, IEEE Transaction on ins trumentation and measurement, Vol. 46, No. 4, August 1997 [2] Wehr A., Airbone laser scanning-an Introduction and overview. ISPR Journal of Photogrammetry & Remote sensing 54 (1998) [3] ITU, Unión Internacional de Telecomunicaciones, Recomendación ITU-R 1622 y ITU-R 1621. [4] Jelalian A., Laser Radar System, Artech House, 1992. [5] Optical Intensity Modulators for Digital and Analog Applications, IEEE Journal of Lightwave Technology, vol 21, No 9, 2003 [6] Lidar Design, Use, and Calibration Concepts for Correct Enviroment Detection, IEEE Transaction of Robotics and Autonomation, Vol 16 No 6, 2000 [7] Bassem R, Elsherbeni A., “Matlab Simulation for Radar system Design” Editorial CHAPMAN & HALL/CRC Press, 1997