universidad de magallanes facultad de ingeniería departamento de
Anuncio

UNIVERSIDAD DE MAGALLANES
FACULTAD DE INGENIERÍA
DEPARTAMENTO DE ELECTRICIDAD
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL
SISTEMA SCADA EN UNIDADES PURIFICADORAS Y
DESALINIZADORAS.
ÁNGEL OYARZO PÉREZ
2005
UNIVERSIDAD DE MAGALLANES
FACULTAD DE INGENIERÍA
DEPARTAMENTO DE ELECTRICIDAD
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL
SISTEMA SCADA EN UNIDADES PURIFICADORAS Y
DESALINIZADORAS.
Trabajo de titulación presentado en
conformidad a los requisitos para
obtener el título de Ingeniero Civil
Electricista, Mención Electrónica
Industrial.
Profesor Guía: Sr. Jorge Reyes Miranda.
Sr. Adán Saldivia Marín.
ÁNGEL OYARZO PÉREZ
2005
Resumen
El presente trabajo está basado en un proyecto gestado en el Complejo Industrial Methanex Chile, cuyo
objetivo fue modernizar las interfases de operación de los sistemas SCADA de las unidades Purificadoras y
Desalinizadoras (Polishers y Desales respectivamente) de agua del complejo industrial.
El sistema de control local instalado en las unidades Desalinizadoras y Purificadoras de las Plantas II y
III, contaba con un sistema supervisor local ya obsoleto, el cual presentaba principalmente, problemas de
funcionalidad, falta de disponibilidad de actualizaciones y repuestos en caso de falla. Además no permitía
realizar respaldos de las bases de datos de los sistemas en forma remota, sino que éstos últimos se debían
detener para realizar dicha tarea, lo que representaba riesgos que podrían generar algún problema mayor como
por ejemplo, des-configuración del sistema SCADA actual y/o detención de los equipos involucrados (Desales y
Polishers).
Adicionalmente, el Polisher de Planta I, era controlado por un PLC local y accionado mediante un panel
manual, no existiendo monitoreo ni acceso al control local a través de una interfaz de operación y tampoco
supervisión desde el DCS de la Planta I.
Para dar solución a estos problemas, el presente proyecto propuso cambiar, el sistema supervisor local
de las Plantas II y III por el nuevo sistema SCADA CITECT integrados en computadores de tecnología actual, lo
cual permitirá supervisar y acceder al control de los equipos en forma local y realizar respaldos de las bases de
datos en forma remota, asimismo reemplazar las antiguas computadoras industriales por equipos modernos
que cumplen con el estándar de Planta y que son totalmente compatibles con el nuevo sistema proyectado.
En el Polisher de Planta I, no existía ningún sistema de acceso al control y supervisión local automático,
por lo cual se planteó instalar una nueva computadora industrial con el sistema SCADA CITECT. En la unidad
Polisher de Planta I se propuso implementar un control supervisor de esta unidad a través del nuevo DCS Delta
V, en el cual se registran y monitorean las señales del Polisher, tal como ocurre en las otras Plantas del
complejo industrial.
INDICE
ITEM
Pag.
Capítulo 1 – Introducción.
1.1
Objetivo
1
1.2
Situación Actual
1
1.2
Problemas y soluciones.
1
1.3
Alcances del proyecto
2
1.5
Descripción de la Memoria
2
Capítulo 2 – Funcionamiento de las Unidades Desales y Polishers.
2.1
Unidad Desalinizadora.
4
2.2
Unidad Desmineralizadora.
18
Capítulo 3 – Componentes del Sistema Supervisor.
3.1
Sistema SCADA CITECT.
31
3.2
Sistema de control distribuido DCS DeltaV.
43
3.3
PLC MODICON 385E.
53
Capítulo 4 – Implementación del Sistema Supervisor en Planta II y III.
4.1
Configuración de las bases de datos en CITECT, de la unidades Desal y
Polisher.
61
4.2
Diseño de las nuevas interfaces gráficas en SCADA CITECT.
66
4.3
Descripción de las interfaces gráficas.
75
4.4
Configuración del Hardware y Comunicaciones, en CITECT
76
4.5
Modificación de la red de comunicación entre CITECT y los PLC locales.
81
4.6
Modificación del sistema eléctrico, para la instalación del proyecto.
83
4.7
Modificaciones estructurales para el montaje del nuevo sistema.
84
Capítulo 5 – Implementación del Sistema Supervisor en Planta I.
5.1
Configuración de las bases de datos la unidad Polisher en CITECT
89
5.2
Diseño de las nuevas interfaces gráficas en SCADA y DCS DeltaV.
89
5.3
Descripción de las interfaces gráficas.
94
ITEM
Pag.
5.4
Configuración del Hardware y Comunicaciones.
94
5.5
Diseño de la red de comunicación entre el PLC de Polisher de Planta I y el DCS DeltaV.
109
5.6
Modificación del sistema eléctrico, para la instalación de la nueva red de control y del
5.7
sistema SCADA.
114
Modificaciones estructurales para el montaje del nuevo sistema.
115
Capítulo 6 – Conclusiones.
6.1
Conclusiones
117
ANEXOS
Anexo A Simbología ISA
120
Anexo B Sistemas de Comunicación Serial.
125
Anexo C Protocolo MODBUS.
132
Anexo D Glosario de Términos.
141
Anexo E Bibliografía
144
Anexo F Planos CD adjunto.
120
ANEXO A – SIMBOLOGÍA ISA.
A.1
Introducción.
En cada proceso hay pasos o funciones que deben ser medidas y controladas para producir un
producto de calidad. La instrumentación es usada para medir y controlar cada función del proceso. Para
comprender las funciones del proceso es esencial saber cuales dispositivos están incluidos dentro del proceso,
como están configurados dentro de éste y donde están ubicados.
Diagramas de instrumentación de proceso (P&ID Piping and Instrumentation Diagram) entregan la
información señalada por lo cual son esenciales para la descripción del proceso y su instrumentación. Por
ejemplo un P&ID se usa para saber cuales instrumentos están asociados a alguna lógica de control dentro del
proceso. Cada P&ID entrega una vista general del proceso, pero es necesario entender que significa cada
símbolo dentro de un P&ID.
Los P&ID se usan para ilustrar una serie de procesos tales como: petroquímicos, alimenticios, etc. Sin
importar el proceso ilustrado la mayoría de los diagramas usan un formato estándar, como el desarrollado por
ISA (Instrumentation Society of America, actualmente: Instrumentation, System and Automation Society ). El
desarrollo del estándar está basado en la premisa que los símbolos son el lenguaje de la instrumentación y
entender e interpretar éstos es más fácil cuando cada uno habla el mismo idioma.
Teniendo correctamente interpretados estos símbolos y la organización general del diagrama es posible
interpretar casi cualquier diagrama de proceso sin mayor dificultad. Dado que los diagramas de instrumentación
entregan una vista general del proceso y la instrumentación asociada son considerados una importante
herramienta, pues permiten monitorear el proceso y realizar rutinas de trabajos más eficientes, También son
muy útiles en la detección de fallas porque muestran como la instrumentación está comunicada.
Finalmente, entregan la información necesaria para realizar un trabajo en el proceso con toda la
seguridad necesaria.
A.2
Diagrama de Instrumentación (ID).
Un ID es esencialmente un mapa del proceso que entrega una vista general de éste y la
instrumentación asociada, en un formato estándar. En los ID se identifican cada uno de los instrumentos del
proceso, sus funciones y su relación con otros componentes del sistema. Estos diagramas son los llamados
Piping and Instrumentation Diagram (P&ID).
A.3
Símbolos de Funciones e Instrumentos.
Los símbolos de instrumentos, tales como círculos, letras, números y líneas, se usan para entregar la
información sobre el proceso, los símbolos pueden representar los dispositivos en el sistema, identificar la
función de un instrumento, indicar como están interconectados entre ellos o con el proceso.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
121
ANEXO A – SIMBOLOGÍA ISA.
El elemento primario o sensor, es la parte del lazo que mide el valor de una variable de proceso y la
transforma en un valor de salida inteligible para el sistema de control del proceso. El sensor puede estar
separado o no de otro elemento del lazo, por ejemplo un transmisor. El símbolo del elemento primario denota el
tipo de sensor usado para medir la variable de proceso.
A.4
Símbolos de Instrumentación y su interpretación.
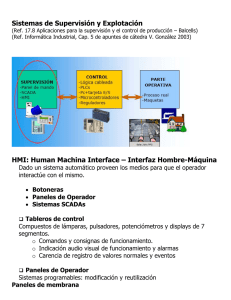
Un círculo en un diagrama de instrumentación es llamado un ‘globo’ o ‘burbuja’. Los círculos se usan
para identificar la función de un instrumento en el proceso, un círculo contiene líneas, letras y números que
identifican la ubicación del instrumento, su función en el proceso y si el instrumento es usado para medir,
indicar, registrar o controlar la variable de proceso. La Figura A1 muestran los símbolos más básicos.
Figura A1. Símbolos básicos de Instrumentación.
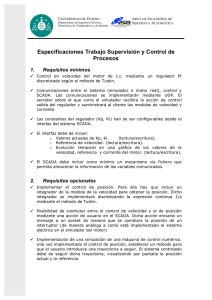
Un círculo indica un único instrumento de campo, si el círculo está encerrado en un cuadrado tiene un
display común o un lazo común con otro instrumento. Los hexágonos se usan para designar funciones
computacionales y un rombo dentro de un cuadrado indica una lógica en un PLC determinado. Los símbolos
también indican como están montados los instrumentos, líneas o ausencia de líneas entregan esta información,
líneas sólidas, dobles o quebradas. Las Figuras A2 y A3 muestran las diferentes combinaciones.
La línea sólida indica que el instrumento está montado en un panel, usualmente con un grupo de instrumentos.
Doble línea indica que el instrumento está en una ubicación auxiliar. Ausencia de línea indica que le
instrumento está montado en el campo, usualmente cerca del punto de medida o cerca del elemento final de
control. Línea quebrada indica que el instrumento está montado detrás de un panel, usualmente no es de fácil
acceso.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
122
ANEXO A – SIMBOLOGÍA ISA.
Figura A2. Símbología ISA.
Figura A3. Simbología ISA.
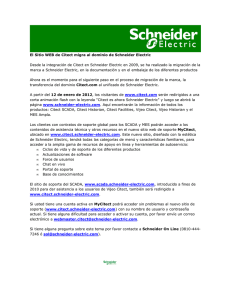
Los números de identificación de instrumentos o ‘tag numbers’ son códigos alfanuméricos que entregan
información específica sobre las funciones de los instrumentos. La identificación de la parte del lazo, del tag, es
generalmente común para todos los instrumentos o funciones de lazo. Sufijos o prefijos se agregan para
completar la información. La figura A4 muestra un ejemplo de configuración de un tag y la tabla A5 entrega un
resumen con la configuración típica de tags de instrumentos.
Figura A4 Configuración de un tag de instrumento.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
123
ANEXO A – SIMBOLOGÍA ISA.
COMBINACIONES DE LETRAS TÍPICAS EN SÍMBOLOS DE INSTRUMENTACIÓN
PRIMERAS LETRAS
PRIMERA
LETRA
MEDIDA O
VARIABLE
INICIAL
DISPOSITIVOS DE
LECTURA
CONTROLADORES
REGISTRO
INDICACIÓN CIEGO
VÁLVULAS
CONT. AUTOACTUADAS
SWITCHES Y DISPOSITIVOS
DE ALARMA
SWITCH
REGISTRO
ALARMA
INDICACIÓN
ALTO
BAJO
ALTO
BAJO
SOLENOIDES,
RELES
TRANSMISORES
SWITCH
REGISTRO
COMBINADO
INDICACIÓN CIEGO
Y
DISPOSITIVOS
COMPUTACIONALES
ELEMENTO
PRIMARIO
PUNTO DE
PRUEBA
CARTUCHO O
PROBETA
AP
AW
A
Análisis.
ARC
AIC
AC
AR
AI
ASH
ASL
AAH
AAL
ASHL
ART
AIT
A T
AY
AE
B
Quemador/
Combustión.
BRC
BIC
BC
BR
BI
BSH
BSL
BAH
BAL
BSHL
BRT
BIT
B T
BY
BE
C
Elección del
Usuario.
D
Elección del
Usuario.
E
Voltaje.
ERC
EIC
EC
ER
EI
ESH
ESL
EAH
EAL
ESHL
ERT
EIT
E T
EY
EE
F
Flujo.
FRC
FIC
FC
FR
FI
FSH
FSL
FAH
FAL
FSHL
FRT
FIT
FT
FY
FE
FQR
FQI
FQSH
FQSL
FQAH
FQAL
FQIT
FQT
FQY
FQE
FFR
FFI
FFSH
FFSL
FFAH
FFAL
FQ
Cantidad de
Flujo.
FQRC
FQIC
FF
Razón de
Flujo.
FFRC
FFIC
FFC
HIC
HC
G
Elección del
Usuario.
H
Manual.
FCV
/
FICV
Corriente.
IRC
IIC
IR
II
ISH
ISL
IAH
IAL
ISHL
IRT
IIT
IT
IY
IE
J
Poder o
Potencia.
JRC
JIC
JR
JI
JSH
JSL
JAH
JAL
JSHL
JRT
JIT
JT
JY
JE
K
Tiempo.
KRC
KIC
KC
KCV
KR
KI
KSH
KSL
KAH
KAL
KSHL
KRT
KIT
K T
KY
KE
L
Nivel.
LRC
LIC
LC
LCV
LR
LI
LSH
LSL
LAH
LAL
LSHL
LRT
LIT
LT
LY
LE
M
Elección del
Usuario.
MSH
MSL
MAH
MAL
N
Elección del
Usuario.
O
Elección del
Usuario.
P
Presión / Vacío.
Presión
Diferencial.
PRC
PIC
PC
PCV
PR
PI
PSH
PSL
PAH
PAL
PDRC
PDIC
PDC
PDCV
PDR
PDI
PDSH
PDSL
PDAH
PDAL
QR
QI
QSH
QSL
QAH
QAL
RR
RI
RSH
RSL
RAH
SR
SI
SSH
SSL
SAH
Q
Cantidad.
QRC
QIC
R
Radiación.
RRC
RIC
RC
S
Velocidad /
Frecuencia.
SRC
SIC
SC
T
Temperatura.
TD
Temperatura
Diferencial.
SCV
PIT
P T
PY
PE
PP
PDIT
PDT
PDY
PE
PP
QSHL
QRT
QIT
QT
QY
QE
RAL
RSHL
RRT
RIT
RT
RY
RE
SAL
SSHL
SRT
SIT
S T
SY
SE
TSHL
TIC
TC
TCV
TR
TI
TSH
TSL
TAH
TAL
TDIC
TDC
TDCV
TDR
TDI
TDSH
TDSL
TDAH
TDAL
UR
UI
V
Vibración /
Análisis de
Maquinarias.
VR
VI
VSH
VSL
VAH
VAL
VSHL
WSHL
W
Peso / Fuerza.
WRC
WIC
W C
WCV
W R
W I
WSH
WSL
WAH
WAL
Peso / Fuerza
Diferencial.
WDRC
WDIC
WDC
WDCV
WDR
WDI
WDSH
WDSL
WDAH
WDAL
ZD
LG
RW
TRT
TIT
TT
TY
TE
TP
TW
TDRT
TDIT
TDT
TDY
TE
TP
TW
UY
W D
Z
PSHL
LW
PRT
TRC
Multivariable.
Y
FG
FP
PDRT
TDRC
U
X
BG
HS
I
PD
BW
APARATO DE
VISUALIZACIÓN
VIDRIO (GLASS)
VRT
VIT
V T
VY
VE
WRT
WIT
W T
W Y
W E
WDRT
WDIT
WDT
WDY
W E
YT
YY
YE
ZRT
ZIT
ZT
ZY
ZE
ZDRT
ZDIT
ZDT
ZDY
ZDE
No clasificado.
Evento / Estado
Presencia.
Posición /
Dimensión.
Medición /
Desviación.
YIC
YC
YR
YI
YSH
YSL
YAH
YAL
ZRC
ZIC
ZC
ZCV
ZR
ZI
ZSH
ZSL
ZAH
ZAL
ZDRC
ZDIC
ZDC
ZDCV
ZDR
ZDI
ZDSH
ZDSL
ZDAH
ZDAL
ZSHL
Tabla A5.Combinación de letras en símbolos de instrumentación
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA EN PURIFICADORAS Y
DESALINIZADORAS.
Angel Oyarzo / 2005
ANEXO A – SIMBOLOGÍA ISA.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS DE PLANTAS I, II Y III.
125
Angel Oyarzo / 2005
125
ANEXO B – SISTEMAS DE COMUNICACIÓN SERIAL.
B.1
Sistemas de comunicación Serie.
Los buses de tipo serie son normalmente más lentos que los del tipo paralelo, pero ellos pueden cubrir
distancias superiores y requieren de un menor número de cables de señal. En la industria son usados con
mayor frecuencia tres estándares de tipo serie, ellos son: RS232, RS422 y RS485.
B.2
Estándar RS-232.
RS232, es un estándar de la “Electronics Industries Association” que data desde 1969. El nombre
verdadero es EIA 232, pero aún se conoce como RS 232, que proviene de Recomended Standard.
Esta norma define una serie de características eléctricas y mecánicas para la comunicación serial. Los
dispositivos que se comunican mediante esta norma se conocen como DTE (Data Terminal Equipment) y DCE
(Data Circuit Terminating Equipment o Data Set).
En la actualidad el protocolo RS 232 se usa generalmente para la comunicación entre dispositivos
inteligentes como computadores o PLC’s, uno de los cuales actúa como maestro y el otro como esclavo. Este
protocolo es ampliamente usado en aplicaciones sencillas, como la conexión directa computador a computador,
o para programar dispositivos inteligentes desde computadores.
Algunas de las principales características de esta norma son Las siguientes:
Ø
Longitud máxima línea de comunicación: 15 metros.
Ø
1 Lógico (marca)
-3 a -15V.
Ø
O Lógico (espacio)
-4-3 a +15V.
La tabla B.1 entrega un listado de la descripción de las patillas (pines) utilizados en esta norma. El
conector estándar usado normalmente es el DB-25. En la Tabla, se describe el significado de las principales
señales, aunque en la práctica solo son esenciales tres: TXD, RXD, y GND.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
ANEXO B – SISTEMAS DE COMUNICACIÓN SERIAL.
126
Tabla B.1 Pin-out de un terminal RS-232.
En la Figura B.1, se muestra una configuración típica que se usa en la mayoría de las aplicaciones de
conexión computador a computador.
Figura B.1 Conexión de terminales de comunicación para conexión RS-232.
B.3
Estándares RS422 y RS485.
Debido a que los sistemas de comunicación RS-422 y RS- 485 tienen características eléctricas
similares se describirán en forma conjunta. Se proporcionaran los conceptos básicos suficientes para
comprender y/o diseñar un sistema basado en un enlace serial RS-422 o RS-485.
Ambas normas, RS-422 y RS-485, usan un par de cables trenzados (2 cables) para cada señal
(transmisión, recepción), se usa el mismo transmisor diferencial con idénticas tensiones. La diferencia principal
es que RS 422 es usado generalmente para conexiones punto a punto, lo que implica que el transmisor está
siempre habilitado, mientras que RS 485 puede ser usado para enlaces señales de varios dispositivos en
cadena, lo que implica de que el transmisor tiene capacidades tri-estado.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
127
ANEXO B – SISTEMAS DE COMUNICACIÓN SERIAL.
B.3.1
Transmisión de Datos con Tensiones Diferenciales Balanceadas.
B.3.1.1 Transmisores Diferenciales Balanceados.
Cuando una señal se transmite en un sistema de transmisión de datos no balanceado, cómo
RS-232, aparece en el conector de la interfaz una tensión con referencia a tierra. Por ejemplo, los
datos trasmitidos (TXD) desde un DTE se medirán en la patilla 2 con respecto a la patilla 7
(tierra). Esta tensión será negativa si la línea está inactiva. y alternará entre niveles positivos y negativos
cuando los datos estén siendo enviados. El receptor RS-232 opera con los rangos de tensión de 3 a 12 Volts
como se muestra en la Figura B.2.
Figura B.2 Circuito RS-232.
El transmisor RS - 232 produce una tensión de salida en el rango de ± (5 a 15) volts. En un sistema de
tensiones diferenciales balanceadas, la tensión producida por el transmisor aparece entre un par de líneas de
transmisión que envían sólo una señal. La Figura B.3 muestra un esquema de un transmisor balanceado y los
voltajes disponibles.
El transmisor balanceado genera una tensión de 2 a 6 volts entre los terminales de salida A y B. Este
tipo de transmisor también cuenta con un terminal C de conexión a tierra. Aunque una adecuada conexión a
tierra es importante, ésta no es usada por el receptor para determinar el estado lógico de los datos. Puede
haber también una línea denominada “enable “; cuya finalidad es conectar o desconectar el transmisor de sus
terminales de salida A y B, Si la señal ‘enable’ esta en estado off se considera que el transmisor está
desconectado de la línea de transmisión. Un transmisor RS-485 debe tener disponible una línea ‘enable’, en
cambio el transmisor RS-422 puede tener esta línea, aunque no siempre es requerida.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
128
ANEXO B – SISTEMAS DE COMUNICACIÓN SERIAL.
Figura B.3. Salida Transmisor diferencial balanceado.
B.3.1.2 Receptores diferenciales balanceados.
El receptor diferencial balanceado sensa el valor de la tensión en la línea de transmisión a través de
los terminales de entrada A y B. También existe el terminal C de conexión a tierra, que en este caso es
necesario para efectuar una conexión adecuada. La Figura B.4 muestra un esquema de un receptor diferencial
balanceado donde se puede visualizar los voltajes relevantes para este tipo de receptor. Si el voltaje diferencial
de entrada V.b es mayor que ±200 mV el receptor tendrá un estado lógico especifico en su terminal de salida.
Si el voltaje de entrada es menor que -200 mV el receptor generará el estado lógico opuesto en su terminal de
salida. Las tensiones de entrada que un receptor balanceado debe sensar son mostradas en la Figura B.4, en
donde un rango de 200 mV a 6 V es requerido para permitir atenuación en la línea de transmisión.
Figura B.4. Receptor Diferencial Balanceado.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
129
ANEXO B – SISTEMAS DE COMUNICACIÓN SERIAL.
B.3.2
Estándar RS-422.
El sistema RS-422 utiliza 2 pares de cables trenzados separados y por lo tanto los datos pueden ser
enviados en ambas direcciones en forma simultánea (full duplex). La Figura B.5 muestra una conexión típica
RS - 422 de 4 hilos entre 2 dispositivos RS - 422. Los dos estados lógicos de las señales son:
Ø
Cuando el terminal A del transmisor es negativo respecto al B, la línea tiene un estado lógico 1 (marca
u 0FF).
Ø
Cuando el terminal A del transmisor es positivo respecto al terminal B, la línea tiene un estado lógico O
(espacio u ON).
Para altas tasas de transmisión de datos es recomendable que la línea de transmisión sea terminada.
una terminación típica se obtiene conectando una resistencia de lOO Ohms, 1/2 Watt. Las características de
impedancia de la línea de transmisión deben ser usadas para determinar la resistencia a emplear, una
resistencia menor a 90 ohms no se debe utilizar. Si la línea de datos es manejada por un transmisor RS - 422
que nunca es desconectado de la línea, entonces no es necesario conectar una resistencia terminal.
Figura B.5 Interfaz RS-422.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
130
ANEXO B – SISTEMAS DE COMUNICACIÓN SERIAL.
B.3.3
Estándar RS-485.
El estándar RS - 485 permite que una línea de transmisión balanceada pueda ser compartida. Hasta
32 pares de transmisores y receptores pueden compartir una misma red de 2 hilos, Muchas de las
características de los transmisores y receptores RS - 485, son las mismas que las de los RS-422. El rango del
voltaje en modo común que el receptor y el transmisor pueden tolerar es incrementado de - 7 a +12 volts.
La Figura B.6 muestra una típica red de 2 cables o línea compartida, se debe notar que la línea de
transmisión tiene resistencias terminales en ambos extremos. También se recomienda conectar la señal a tierra
en un sistema RS - 485 para mantener el voltaje en modo común dentro del rango requerido por el receptor.
Una red RS-485 también puede ser conectada usando una configuración de 4 hilos como se muestra
en la Figura B.7. En una red de este tipo es necesario que uno de los nodos se considere como maestro y
todos los restantes esclavos, La red es conectada de tal forma que todos los nodos esclavos se comuniquen
con el nodo maestro, Los nodos esclavos sólo se pueden comunicar con el maestro. Este tipo de red tiene
varias ventajas sobre otros tipos de redes como por ejemplo:
Ø
Los esclavos nunca escuchan las respuestas de otros esclavos al maestro.
Ø
Un nodo esclavo nunca puede responder por error a otro esclavo.
Figura B.6 Red Típica RS-485 de 2 Hilos.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
ANEXO B – SISTEMAS DE COMUNICACIÓN SERIAL.
131
Figura B.7 Red RS-485 de 4 Hilos.
B.4
Control de un conversor RS- 485 / RS - 232 mediante la señal RTS.
Como se mostró anteriormente, el sistema RS - 485 debe tener un transmisor que se pueda
desconectar de la línea cuando un nodo en particular no está transmitiendo. En un conversor RS - 232 a RS 485, esto generalmente se implementa usando la señal de control RTS desde una puerta serial para habilitar el
transmisor RS - 485. Cuando se usa para controlar la señal RTS, es importante estar seguro de que la señal
RTS esté activa antes de que los datos sean enviados. Del mismo modo, la señal RTS debe estar en el estado
bajo después de que el último bit de datos ha sido enviado. El control de los tiempos es realizado por el
software que maneja la puerta serial y no por el conversor.
Cuando una red RS - 485 es conectada en una configuración de 2 hilos, el receptor de cada nodo será
conectado a la línea, Figura B.6. Si este modelo de conversor es usado en este tipo de red es posible conectar
los receptores de tal modo que estos reciban cuando el transmisor esté enviando datos.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
132
ANEXO C – Protocolo MODBUS.
C.1
Introducción.
El protocolo MODBUS, define una estructura de mensajes que los PLCs pueden reconocer y usar,
independiente del tipo de red sobre la cual se están comunicando. Este protocolo define el proceso de cómo un
controlador solícita accesar a otro dispositivo, cómo éste responde a las solicitudes (query) de otros
controladores o dispositivos, y la forma cómo los errores son detectados y reportados.
El protocolo MODBUS provee el estándar interno que utilizan los PLCs y dispositivos en general para
analizar los mensajes. Durante la comunicación sobre una red MODBUS, el protocolo determina cómo cada
controlador sabrá su dirección, reconocerá un mensaje direccionado a él, determinará la acción a tomar, y
extraerá los datos u otra información contenida en el mensaje. Si una respuesta es requerida, el controlador
construye el mensaje de respuesta y lo envía usando el protocolo MODBUS.
El protocolo MODBUS define la forma en que los mensajes son interpretados y creados, y no la forma
en que estos se transmiten. El modo de transmisión es generalmente señal RS232 o RS485. Aunque los
dispositivos pueden tener un amplio rango de direcciones de red, el protocolo MODBUS sólo acepta en el
rango de 1 a 247. En la figura C. 1, se observa una red MODBUS conformada por tres dispositivos, los cuales
tienen las direcciones 1, 3, y 4. Estas direcciones son arbitrarias y se pueden designar libremente. Se puede
observar además que estos dispositivos son monitoreados por un computador en el cual existe algún programa
de monitoreo que soporta el protocolo MODBUS.
Figura C.1 Ejemplo de una aplicación MODBUS.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
ANEXO C – Protocolo MODBUS.
C.2
133
Comunicaciones sobre una red MODBUS.
Generalmente los puertos usados por los dispositivos que se comunican mediante éste protocolo,
utilizan el estándar RS-232; el cual define el tipo de conector, cableado de patillas, niveles de señales,
velocidad de transmisión, y comprobación de paridad. Los dispositivos pueden ser incluidos en la red
directamente o empleando un módem.
Los dispositivos se comunican mediante la técnica maestro-esclavo, en la cual sólo un dispositivo (el
maestro) puede iniciar transacciones o solicitudes. Los otros dispositivos (esclavos), responden suministrando
los datos requeridos por el maestro, o tomando la acción requerida en la solicitud. Usualmente los dispositivos
maestros son equipos tales como: computadores servidores, interfaces, o dispositivos de programación, los
esclavos son principalmente PLCs.
El maestro puede direccionar a un esclavo individual, o iniciar un mensaje general (broadcast) para
todos los esclavos; en este último caso los esclavos no responden al maestro.
C.3
Ciclo solicitud - respuesta.
El protocolo Modbus establece el formato de las solicitudes del maestro hacia el esclavo direccionado
(o hacia todos). Un código de función define la acción requerida, los datos a ser transmitidos y un campo de
chequeo de errores. La respuesta del esclavo también se construye usando Modbus. Esta contiene campos
confirmando la acción tomada, algún dato retornado y un campo de chequeo de errores. Si ocurrió algún error
en la recepción del mensaje, o si el esclavo no pudo realizar la acción requerida, este construirá un mensaje de
error y lo enviará como respuesta.
Figura C.2 Ciclo: Solicitud – Respuesta de un sistema Maestro – Esclavo.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
ANEXO C – Protocolo MODBUS.
C.3.1
134
La solicitud.
El código de función en la solicitud le dice al esclavo direccionado el tipo de acción a tomar. El campo
de bytes de datos contiene información adicional que el esclavo pueda necesitar para llevar a cabo la acción
requerida. Por ejemplo, la función código 03, solicita al esclavo leer los registros de salida especificados y
comunicar sus contenidos. El campo de datos debe contener la información necesaria para que el esclavo sepa
desde que registro empezar y cuantos debe leer. El campo para chequeo de errores provee al esclavo un
método para verificar la integridad del mensaje recibido.
C.3.2
La respuesta.
Si el esclavo responde en forma normal, el código de función de la respuesta será un eco del código
de función de la solicitud. El byte de datos contiene la información recolectada por el esclavo, como valores de
registros o estados lógicos. Si ocurre algún error, el código de función es modificado para indicar que la
respuesta es una respuesta de error y el byte de datos contendrá un código que describe el error. El campo de
chequeo de errores permite al maestro verificar que el contenido del mensaje sea válido.
C.4
Modos de transmisión.
Los PLCs, controladores o dispositivos que se comunican mediante el protocolo MODBUS, pueden ser
configurados para hacerlo mediante dos modos de comunicación: ASCII o RTU.
La selección del modo ASCII o RTU, concierne sólo a la red MODBUS. Este define el contenido de
bits de los campos del mensaje que es trasmitido serialmente en esta red. El modo de transmisión determina
cómo la información será empaquetada dentro de los campos del mensaje y cómo será posteriormente
decodificada.
C.4.1
Modo ASCII.
Cuando los controladores son configurados para comunicarse utilizando el modo ASCII, cada byte de
8 bits es enviado como 2 caracteres ASCII. La ventaja principal de este modo de transmisión, es que permite
que exista un intervalo de hasta un segundo entre 2 caracteres, sin que esto genere un error.
Ø
Sistema de codificación.
•
Hexadecimal, caracteres ASCII 0.. .9, A. .F.
•
Un carácter hexadecimal contenido en cada carácter ASCII del mensaje.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
ANEXO C – Protocolo MODBUS.
Ø
Bits por byte
•
1 bit de partida (start bit).
•
7 bits de datos, el menos significativo es enviado primero.
•
1 bit para paridad (even/odd), ningún bit para sin paridad.
•
1 bit de parada (stop bit) si existe paridad, 2 bits si no existe.
Ø
Campo para chequeo de errores.
•
Chequeo de redundancia longitudinal (LRC).
C.4.2
135
Modo RTU.
Cuando los controladores están configurados para comunicarse sobre una red MODBUS, usando el
modo RTU (Unidad Terminal Remota), cada byte de 8 bits en un mensaje, contiene 2 caracteres
hexadecimales de 4 bits. La ventaja principal de este modo de transmisión, es que su alta densidad de
caracteres permite un mejor traspaso de datos que el modo ASCII a una misma velocidad (Baud Rate). Los
mensajes deben ser transmitidos en un flujo continuo.
Ø
Sistema de codificación.
•
Binario de 8 bits, hexadecimal 0. 9, A .. 1’
•
2 caracteres hexadecimales contenidos en cada campo de 8 bits del mensaje.
Ø
Bits por Byte.
•
1 bit de partida (start bit)
•
8 bits de datos, el menos significativo es enviado primero.
•
1 bit para paridad (odd/even), ningún bit si no existe paridad.
•
1 bit de parada (stop bit) si existe paridad, 2 bits si no existe.
Ø
Campo de chequeo de errores.
•
Chequeo de redundancia cíclica (CRC).
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
136
ANEXO C – Protocolo MODBUS.
C.5
Construcción del mensaje Modbus.
En cualquiera de los dos modos de transmisión (RTU o ASCII), el dispositivo transmisor pone el
mensaje dentro de un paquete con un principio conocido y un punto final. Esto permite a los dispositivos
receptores comenzar a leer el mensaje desde el principio, leer el campo de la dirección y determinar cual
dispositivo ha sido seleccionado y saber cuando el mensaje ha concluido.
C.5.1
Estructura en modo ASCII.
En el modo ASCII, los mensajes comienzan con con signo dos puntos (: ), y terminan con un retorno
de carro y cambio de línea (carriage return / line feed, CRLF).
Los caracteres permisibles de ser transmitidos en todos los otros campos son hexadecimales O .. 9, A
. F. Los dispositivos unidos a la red MODBUS, continuamente están monitoreando el bus de datos esperando
el carácter “:”, cuando este carácter es recibido, cada dispositivo decodificará el próximo campo (el campo que
contiene la dirección) , para saber si ha sido direccionado.
En un mensaje pueden existir intervalos de hasta un segundo entre caracteres. Si existe un intervalo
mayor a este, el dispositivo receptor asumirá que ha ocurrido un error, La figura B.3 muestra el formato típico
de un mensaje en modo ASCII.
Figura C.3 Mensaje en modo ASCII.
C.5.2
Estructura en modo RTU.
En el modo RTU, el mensaje parte con un silencio de a lo menos 3.5 caracteres, esto es generalmente
implementado como un múltiplo de la velocidad de transmisión que está siendo empleada en la red MODBUS.
(En la figura C.4, se muestra como Tl-T2-T3-T4). El primer campo transmitido es la dirección del dispositivo.
Los caracteres que pueden ser transmitidos son hexadecimales O .. 9 A .. F. Los dispositivos en la
red, están continuamente monitoreando el bus de datos, incluso durante los intervalos de silencio. Cuando el
primer campo (el campo de la dirección) es recibido, cada dispositivo lo decodificará para saber si ha sido
direccionado.
Del mismo modo, después de que el último carácter ha sido transmitido se envía un intervalo de
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
137
ANEXO C – Protocolo MODBUS.
silencio de a lo menos 3.5 caracteres indicando el final del mensaje. Un nuevo mensaje puede comenzar
después de este intervalo.
Figura C.4 Mensaje en modo RTU.
La totalidad del mensaje es transmitido como un flujo continuo. Si antes de completar el mensaje,
ocurre un intervalo de silencio de más de 1.5 caracteres, el dispositivo receptor rechaza el mensaje y asume
que el próximo byte será el campo de dirección de un nuevo mensaje.
Del mismo modo, si un nuevo mensaje comienza antes de 3.5 caracteres, el dispositivo receptor lo
considerará como la continuación de un mensaje anterior.
C.5.3
Estructura del campo de dirección.
El campo de dirección en un mensaje tiene 2 caracteres (ASCII) u ocho bits (RTU). Las direcciones
válidas de dispositivos están en el rango de O a 247 (decimal). El dispositivo maestro direcciona un esclavo en
particular poniendo la dirección de este último en el campo de dirección del mensaje. Cuando el esclavo
responde, éste incluye su propia dirección en el campo de dirección, para que el maestro sepa cual esclavo
está respondiendo.
C.5.4
Manejo del campo del código de función.
El campo del código de función, consta de 2 caracteres en el modo ASCII o de 8 bits en el modo RTU.
Los códigos de función están en el rango de 1 a 255 decimal. De este rango, sólo algunos códigos son
aplicables a todos los PLC.
Cuando el maestro envía un mensaje a algún esclavo, el código de función indica al esclavo
direccionado el tipo de acción a realizar. Como ejemplo se pueden mencionar lectura del estado de salidas o
entradas discretas, lectura de los valores de un grupo de registros análogos o escribir valores a bobinas o
registros.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
138
ANEXO C – Protocolo MODBUS.
Cuando el esclavo responde al maestro, éste usa el código de función para indicar una operación
normal o el tipo de error que ocurrió (respuesta de excepción). En una respuesta normal, el esclavo
simplemente repite el código de función original. Para una respuesta de excepción, el esclavo retorna un
código que es equivalente al código de función original con su bit más significativo en uno lógico.
Por ejemplo, un mensaje desde un maestro a un esclavo, requiriendo leer un grupo de registros,
podría tener el siguiente código:
0000 0011
(03 hexadecimal)
Si el dispositivo esclavo recibe la acción requerida sin error, éste retorna el mismo código como
respuesta. Si ocurre una excepción, éste retorna:
10000011
(83 hexadecimal)
En suma, a esta modificación del código de función en una respuesta de excepción, el esclavo pone
un código único dentro del campo de datos de la respuesta. Este indica al maestro que tipo de error ocurrió o la
razón de la excepción. El programa de aplicación del dispositivo maestro tiene la responsabilidad de manejar
las respuestas de excepción. Algunos procesos típicos son reintentar la comunicación, intentar diagnosticar los
mensajes del esclavo y notificar a los operadores.
C.5.5
Contenidos del campo de datos.
El campo de datos se construye usando conjuntos de dos dígitos hexadecimales, en el rango de 00 a
F E hexadecimal. Estos pueden estar compuestos por un par de caracteres ASCII o por un carácter RTU, de
acuerdo al modo de transmisión señal.
El campo de datos de los mensajes enviados desde un maestro a un esclavo, contiene información
adicional, la cual es utilizada por el esclavo para realizar la acción definida por el código de función. Esto puede
incluir ítems como direcciones de registros análogos y discretos, la cantidad de items a ser manejados y la
cantidad de bytes de datos en el campo.
Por ejemplo, si el maestro pide al esclavo leer un grupo de registros de salida (código 03), el campo de
datos especifica el registro de inicio y cuantos registros leer. Si el maestro envía valores a un grupo de registros
contenidos en el esclavo (código 10 hexadecirnal), el campo de datos especifica el registro de inicio, cuantos
registros escribir, la cantidad de bytes en el campo de datos y los datos que serán escritos en los registros.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
139
ANEXO C – Protocolo MODBUS.
Si no ocurren errores, el campo de datos de la respuesta del esclavo al maestro contiene los datos
requeridos. De ocurrir un error, este campo contiene un código de excepción que la aplicación que está
ejecutando el maestro usa para determinar la acción a tomar.
El campo de datos puede no existir (de largo O) en cierto tipo de mensajes. Por ejemplo, cuando un
maestro solicita a un esclavo responder con su listado de eventos (código OB hexadecimal), el esclavo no
requiere ninguna información adicional. El código de función sólo especifica la acción.
C.5.6
Contenidos del campo de chequeo de errores.
Dos tipos de métodos de chequeo de errores son usados en las redes MODBUS. El contenido del
campo de chequeo de errores depende del método que este siendo usado.
a)
ASCII.
Cuando se utiliza el modo ASCII, el campo de chequeo de errores contiene dos caracteres ASCII.
Estos caracteres son el resultado de un cálculo denominado chequeo de redundancia longitudinal (LRC) que se
desarrolla con los contenidos del mensaje.
b)
RTU.
Cuando se utiliza el modo de transmisión RTU, el campo de chequeo de errores contiene un valor de
16 bits implementado como dos bytes de 8 bits. El valor del chequeo de error es el resultado de un cálculo
llamado chequeo de redundancia cíclica (CRC) desarrollado con los contenidos del mensaje.
El campo CRC se agrega al mensaje como último campo. Cuando se hace esto, el byte menos
significativo del campo es puesto primero, seguido por el byte más significativo. El byte de mayor peso del CDC
es el último byte enviado en el mensaje.
C.6
Funciones MODBUS.
En la tabla C.1 se listan las solicitudes mas comúnmente usadas y sus códigos de función.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
140
ANEXO C – Protocolo MODBUS.
Tabla C.1 Funciones Modbus.
El protocolo MODBUS maneja cuatro tipos de variables; valores discretos de entrada, valores
discretos de salida, variables análogas de entrada, y variables análogas de salida. Para identificar cada uno de
estos tipos de variables, el protocolo MODBUS utiliza una constante que se suma al valor de la dirección de la
variable requerida.
La dirección está en el rango de O al número de valores discretos o registros análogos disponibles
menos uno. La tabla C.2 muestra los valores de las constantes utilizadas por el protocolo MODBUS.
Tabla C.2 Constantes para los distintos tipos de valores Modbus.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
141
ANEXO D GLOSARIO DE TÉRMINOS.
Alarma
Alerta al operador que un evento particular ha ocurrido. El ingeniero de
control define el tipo de alarma que se implementarán en el sistema
como también las propiedades de cada una de ellas.
Algoritmo
Un conjunto de pasos lógicos para resolver un problema o realizar una
tarea. Los algoritmos de los módulos definen como se comporta el
módulo.
Área
Una división lógica del sistema de control de proceso. Las áreas
típicamente representan una ubicación dentro del proceso o funciones
principales del proceso.
Base de Datos (DB).
Una colección organizada de datos para una rápida búsqueda y
respuesta. Colección de datos donde se guarda la configuración del
sistema de control.
Controlador
Dispositivo que ejecuta los algoritmos para controlar los equipos de
proceso y comunicar los datos de proceso dentro del sistema de
control.
DeltaV Explorer
Herramienta de navegación que entrega una visión general del sistema
de control. Ésta permite ver la jerarquía de áreas, nodos y mover a
diferente
áreas
nodos
y
módulos.
DeltaV
Explorer
es
usado
especialmente para copiar y mover módulos dentro del sistema usando
la capacidad ‘drag and drop’ incorporada.
DST
Device Signal Tag. Consiste en la identificación de un instrumento
(Tag) y la señal asociada a él.
Estación de Trabajo
Computador personal el cual corre bajo Win NT o XP. Estación que
maneja hasta 512 canales de entrada-salida desde los diferentes
controladores.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
142
ANEXO D GLOSARIO DE TÉRMINOS.
Estado Step.
Un elemento de uns SFC que contiene un conjunto de acciones, puede
estar activo o inactivo.
Bloque de Función
Una unidad de procesamiento lógico que define la conducta de un
algoritmo o un módulo en particular.
FBD
Function Block Diagram. Diagrama que contiene
múltiples bloques
defunción.
Histórico
Un registro de eventos cronológicos, incluyendo los ajustes y cambios
hechos a un módulo y mostrar que el producto del proceso está bajo
los estándares de fabricación.
I/O
Señal de Entrada-Salida. Recepción y transmisión de una señal o
interfaz.
Módulo
Estructura lógica configurable que se enfoca en los equipos de
proceso. Módulos enlazan algoritmos, condicionales, alarmas, displays,
históricos, y otras características a un equipo. El módulo se configura
para desarrollar la estrategia de control.
Nodo
Un dispositivo dentro de la red de control. Por ejemplo controladores,
switchs, estaciones de trabajo, etc.
ODBC
Open Database Connectivity. Interfaz abierta para la conectividad entre
base
de
datos
que
provee
acceso
a
una
gran
variedad
de
computadoras personales, servidores, mini-computadores, etc.
Operador
Persona que supervisa y controla el funcionamiento del proceso. Puede
ser directamente en el terreno o a través de una interfaz de operador.
Parámetro.
Agrupación lógica de datos tal como una PV o un SP.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
143
ANEXO D GLOSARIO DE TÉRMINOS.
Proceso
Una colección de dispositivos físicos y métodos usados en la
manufacturación de un producto.
Registro
Una colección de datos asociados a un evento, tales como día, hora,
parámetros, nodos, áreas, etc. Los registros pueden ser copiados,
impresos, y exportados y hasta presentados en un gráfico de
tendencias.
SFC
Sequential Function Chart, Diagrama que define una secuencia de
eventos con estados, transiciones y acciones.
Tag
Identificación de un instrumento, válvula, y otros dispositivos de campo.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
144
ANEXO E BIBLIOGRAFÍA.
Bibliografía.
1
ECODYNE Limited:
ECODYNE Manuals, “Operating and Maintenance Manual Condensate
Polishing System”.
2
Aqua Chem Inc:
Water Technologies División, “Operating, Process and Maintenance
Manual”.
3
Methanex Chile:
Departamento de Capacitación, “Manual de Operación Unidades
Desalinizadoras”.
4
Methanex Chile:
Departamento de Capacitación, “Manual de Operación Unidades
Polishers”.
5
CITECT Corporation:
“CITECT HMI System Overview” CITECT Brochure, 2000.
6
CITECT Corporation:
“CITECT v.5 User Guide” CITECT Support, 2000.
7
CITECT Corporation:
“Quick Start User Guide” CITECT Training, 2000.
8
CITECT Corporation:
“CITECT Configuration Guide” CITECT Support, 2000.
9
MODICON Inc.
“System Planning and Instalation Guide for Model 984 381/385”
MODICON Inc. 1992.
10
AEG Schneider Automation:
“Modicon 984 Student Reference Guide” MODICON Inc. 1992.
11
AEG Schneider Automation:
“Modicon Modbus Plus Network Planning and Instalation Guide”
MODICON Inc. 1994.
12
AEG Schneider Automation:
“Modbus Plus and Substation Automation” Schneider Automation
Whitepaper. 1994.
13
MODICON Inc.
“Modicon Modbus Protocol Reference Guide” MODICON Inc. 1992.
14
MODICON Inc.
“984 Programable Controller System Manual” MODICON Inc. 1992.
15
EMERSON PROCESS
“Getting Started with DeltaV Automation Software” Fisher-Rosemount
Systems, Inc. 2002..
16
FISHER-ROSEMOUNT
“Course 7009 DeltaV Operate Implementation” Fisher-Rosemount
Systems, Inc. 2002.
17
FISHER-ROSEMOUNT
“Course 7012 DeltaV Operate Interface” Fisher-Rosemount Systems,
Inc. 2002.
19
FISHER-ROSEMOUNT
“DeltaV Books On-Line” 1994-2001, Fisher-Rosemount Systems, Inc.
20
FISHER-ROSEMOUNT
“DeltaV Ciber System Security” Whitepaper 2005.
21
STUART BOYER
ISA Publication, “Supervisory Control and Data Adquisition 3 Edition”
rd
2004.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
145
ANEXO E BIBLIOGRAFÍA.
nd
22
C.L. ALBERT
ISA Publication, “Fundamentals of Industry Control 2 Edition” 1994.
23
DICK CARO
ISA Publication, “Automation Network Selection 1 Edition” 2003.
24
BÉLA LIPTAK
CRC Press, ISA Publications, “Instrument Engineer’s Handbook 3
th
rd
Edition” 2002.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
1
CAPÍTULO 1 – INTRODUCCIÓN.
Introducción.
1.1
Objetivo.
Mejoramiento del sistema de control supervisor de las unidades Desales y Polishers locales y,
anticipación a los cambios de tecnología y obsolescencia.
1.2
Situación Actual.
En el sistema de acceso al control local de las unidades Desales y Polishers de las Plantas del
complejo, se dispone de una interfaz llamada IC-2000, la cual funciona en computadoras estándar industriales
en ambientes Windows ya no usados en planta. Las unidades desalinizadoras de Planta II, funcionan con el
sistema Panel Mate excepto Polisher de Planta I donde no existe ningún sistema SCADA (“supervisory control
and data adquisition”).
Estas unidades de acceso están aisladas entre sí y para realizar mantenimiento de ellas (Respaldos
(Backup) de sus bases de datos, actualizaciones, etc.) es necesario conectarse en forma local y detener la
supervisión.
Las computadoras utilizadas en Polisher y Desales en Planta II y III están discontinuadas y no existe un
sistema computacional en Polisher de Planta I, que actualmente sólo consta con un PLC y paneles locales de
operación que son accionados manualmente.
1.3
Problemas y Soluciones.
La situación antes descrita origina los siguientes problemas:
Ø Para los equipos actuales no hay disponibilidad de respaldo ni actualizaciones, el software SCADA
IC-2000 esta obsoleto, por lo tanto si ocurriera un problema existe la posibilidad que se pierda el
acceso al control de las unidades, llegando a niveles críticos incluso, detención de éstas.
Ø
Los sistemas actuales se bloquean, debido a la obsolescencia del hardware y software, de estos
equipos.
Ø
Tecnológicamente estos sistemas no cumplen con el estándar de Planta.
Ø
No es posible realizar respaldos de las bases de datos de ellos en forma remota. Además, para realizar
esta tarea actualmente es necesario detener la aplicación y el acceso a la supervisión durante el
respaldo.
Ø
No es posible realizar diagnóstico del sistema en forma remota.
Ø
El Polisher de Planta I no cuenta con un sistema SCADA.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCA DA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
2
CAPÍTULO 1 – INTRODUCCIÓN.
Para resolver los problemas anteriormente mencionados se proponen las siguientes soluciones:
Ø
Actualización del Hardware con los requerimientos mínimos propuestos por el fabricante:
Computadoras de 128MB de RAM, procesador Pentium III de 600 Mhz mínimo, tarjeta de red Ethernet,
Floppy Disk 3.5”, CDRom, en lo posible un único fabricante.
Ø
Actualización del sistema operativo a Windows NT o XP.
Ø
Instalar y actualizar software SCADA CITECT Server de 500 pts, en todas las Unidades.
Ø
Conectar las computadoras de Polisher y Desales de cada Planta a cada PLC del equipo
correspondiente.
Ø
En Planta I implementar un sistema de control supervisor local a través de CITECT, además, en el
nuevo DCS DeltaV implementar el monitoreo de ésta unidad.
1.4
Alcances del trabajo.
El presente trabajo tiene los siguientes alcances:
1.5
Ø
Generar las distintas bases de datos para los sistemas SCADA y DeltaV.
Ø
Diseño de las nuevas interfases gráficas de los equipos HMI (pantallas).
Ø
Configuración del hardware de las distintas unidades en el nuevo sistema SCADA.
Ø
Registro de todas las señales que van a ser monitoreadas en CITECT.
Ø
Diseño de la nueva red de control (CITECT / PLC).
Ø
Modificación del sistema eléctrico para la instalación del nuevo sistema.
Ø
Modificaciones estructurales para el montaje del nuevo sistema.
Descripción de la memoria.
El proyecto desarrollado muestra el procedimiento a realizar para implementar la actualización de las
diferentes interfases de operación de las unidades Desalinizadoras y Purificadoras del complejo y el monitoreo
a través del DCS DeltaV de las señales del Polisher de Planta I.
En principio se entregan antecedentes e información asociada a la problemática para facilitar la
compresión del problema, posteriormente el desarrollo de la solución propuesta, y las conclusiones finales
obtenidas de la experiencia desarrollada.
El capítulo 1 entrega una visión general del problema a solucionar a través del proyecto desde la
presentación del sistema actual con sus componentes hasta los objetivos necesarios de alcanzar para lograr
una solución satisfactoria del problema, que es la implementación del nuevo sistema supervisor SCADA.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCA DA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
3
CAPÍTULO 1 – INTRODUCCIÓN.
El capítulo 2, proporciona la descripción del funcionamiento de las unidades a intervenir como así
también de los componentes del sistema supervisor actualmente en funcionamiento y su interacción con ellas.
El capítulo 3, describe el nuevo sistema SCADA a instalar, y la interconexión con el DCS Delta V, que
son las principales aplicaciones con las que se trabajará dentro del proyecto. Se muestra sus principales
características y da una visión general de las estructuras de cada uno de ellos.
El capítulo 4, presenta el desarrollo de la solución del proyecto para los equipos de Planta II y III.
Describe el diseño de las interfases, la configuración de las bases de datos en el nuevo, la configuración de las
comunicaciones, describe los nuevos componentes y entrega los trabajos a realizar en terreno para la
implementación del nuevo sistema SCADA CITECT.
En el capítulo 5, se hace la misma descripción que en el capítulo anterior, pero para el Polisher de
Planta I. Además se incorporan los trabajos a realizar en el DCS DeltaV, tanto en la configuración de la interfaz
como en el diseño de la comunicación con el PLC.
El capítulo 6, entrega las conclusiones finales de la presente propuesta de ingeniería que moderniza el
sistema de control supervisor de las unidades Desalinizadoras y Purificadoras del complejo industrial.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCA DA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
4
CAPÍTULO 2 – FUNCIONAMIENTO DE LAS UNIDADES DESALINIZADORAS Y PURIFICADORAS.
2.1
Unidad Desalinizadora, Desal.
2.1.1
Descripción General del Proceso.
El sistema evaporador / ebullidor multi etapa de tubo largo, es un sistema diseñado para producir agua
dulce a partir de agua de mar por calentamiento hasta alcanzar el punto de “flash” (ebullir / evaporar). El vapor,
producto de la ebullición, es retirado hacia el haz de tubos condensadores donde se condensa como destilado.
La planta de destilado consta de:
Ø
Un tubo largo y curvado en cada etapa que recorre todo el sistema.
Ø
Sólo una parte del agua de mar que pasa a través de los tubos se condensa en la primera etapa. El
proceso se repite varias veces a medida que el agua de mar avanza de etapa en etapa.
Ø
Al final del proceso, toda la salmuera acumulada fluye, pues por las temperaturas de diseño sólo se
permite que circule una vez por la unidad. Sólo en caso que la temperatura de la salmuera de desecho
sea más baja que la de alimentación, se recicla una porción.
La figura 2.1 muestra un esquema general del proceso de desalinización, brevemente antes descrito.
2.1.2
Principales Equipos asociados a la Unidad.
Estanque Evaporador (Evaporator Vessel).
El estanque evaporador esta dividido en 12 etapas. Éstas están separadas en dos grupos por un
divisor longitudinal, cada grupo está dividido en 6 etapas separadas por placas separadoras, las cuales
separan los estados. Es la cavidad principal donde se recoge el condensado de agua de mar.
Calentador de Salmuera (Brine Heater).
El calentador de salmuera es un intercambiador de calor tipo carcasa, cilíndrico, montado cerca de la
etapa 1. El agua que ha sido calentada dentro de los tubos condensadores, ingresa al calentador donde ésta
es calentada por acción del vapor, que circula por el lado carcasa y entrega su calor al agua nuevamente con la
finalidad de mejorar el proceso de evaporación.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 2 – FUNCIONAMIENTO DE LAS UNIDADES DESALINIZADORAS Y PURIFICADORAS.
5
Figura 2.1 Detalle simplificado del proceso de desalinización.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
6
CAPÍTULO 2 – FUNCIONAMIENTO DE LAS UNIDADES DESALINIZADORAS Y PURIFICADORAS.
Sistema de Vacío (Vacuum System).
El sistema de vacío consiste en un sistema de eyectores de aire de dos etapas, y un eyector inicial
“Hogging”, el cual proporciona el vacío inicial, para la partida del sistema. La función principal de los eyectores
es evacuar el aire y los gases no condensables presentes en la alimentación del agua y cualquier otro aire
presente, puesto que si estos gases no fueran removidos, ellos podrían aislar la transferencia de calor en los
tubos condensadores del evaporador.
Sistema Anti-Incrustaciones (Anti-Scale System ).
Éste consiste en la adición de anti-incrustantes químicos que ayudan a retardar la formación de
incrustaciones alcalinas en las superficies de transferencia de calor. Una solución diluida es mezclada en un
tanque químico e inyectada a través de la bomba para químicos suministrada con el equipo.
Sistema Anti-Espuma (Anti-Foam System).
Surfactantes presentes en el agua de mar ocasionan la o
f rmación de espuma dentro del evaporador,
muchos de ellos microscópicos e imposibles de filtrar. La utilización de agentes químicos anti-espumantes
previene la formación de ésta al ser introducidos en pequeñas cantidades en la alimentación del agua de mar.
Este sistema consiste de un tanque anti-corrosivo con mezclador, un filtro una bomba de suministro y el fitting
necesario. Los químicos son inyectados al sistema a través de la bomba en la entrada de la alimentación del
evaporador. La velocidad y el estrangulamiento de la bomba pueden ser ajustados para permitir el suministro
de una adecuada cantidad de químicos.
Bombas y Motores.
Existen tres bombas principales en este sistema, (ver en la Figura 2.4, para su ubicación):
Ø
Bomba de descarga de salmuera (Brine Blowdown Pump), P-614.
Ø
Bomba de destilado (Distillate Pump), P-615.
Ø
Bomba de condensados (Condensate Return Pump), P-613.
2.1.3
Funcionamiento de la Unidad Desalinizadora.
Cada etapa de la unidad desalinizadora posee un sistema de venteo especialmente diseñado, el cual
permite remover los gases no condensables desde cada una de las etapas, pero no permite la ecualización de
presiones a través de la unidad. Compuertas de salmuera se ubican adjuntas a las placas separadoras y
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
7
CAPÍTULO 2 – FUNCIONAMIENTO DE LAS UNIDADES DESALINIZADORAS Y PURIFICADORAS.
actúan como orificios de flujo, produciendo un sello de líquido entre cada etapa. Un conducto dirige la salmuera
desde la sexta a la séptima etapa (alrededor del divisor longitudinal).
Los demisters (separadores de gotas), conformados por capas de delgadas láminas metálicas
densamente entrelazadas, permiten retirar cualquier partícula líquida de salmuera del vapor condensado, que
pueda empobrecer la calidad del destilado obtenido.
Cada una de las etapas está equipada con un canal de destilado ubicado inmediatamente debajo de
los tubos condensantes, el cual colecta el destilado y lo dirige hacia el ducto de succión de las bombas de
destilado.
La separación ocurre cuando el agua de mar caliente entra a la primera etapa, la cual se mantiene a
una presión menor que la del agua que entra. El calor es captado por el agua y una fracción es convertida a
vapor hasta que la temperatura del agua alcanza la temperatura de saturación correspondiente a la presión de
la etapa. En otras palabras, el agua caliente es separada por una reducción de presión.
El vapor ascendente pasa por demisters que atrapa las gotas de salmuera que puedan estar
mezcladas con el vapor y el vapor puro pasa a condensar al tener contacto con los tubos condensadores. El
proceso de destilación opera desde un bajo vacío en la primera etapa (cercano a la presión atmosférica), hasta
un alto vacío en la última etapa, donde la diferencial de presión es clave para conseguir el flash sucesivo.
El vacío inicial en las etapas es creado por un sistema de eyectores de alta presión, impulsados por
vapor de media presión, y una vez que la planta está operando bajo las condiciones de diseño, el vapor
condensante sobre los tubos mantiene el vacío. El sistema de vacío es posteriormente usado para remover los
gases no condensables liberados durante la operación. La Figura 2.2 muestra un diagrama de flujo elemental
de la unidad donde se aprecia lo anteriormente señalado.
El sistema de un solo paso está diseñado para operar a temperaturas entre 90-105º C, dependiendo
del método de control de incrustaciones empleado. Con el objeto de mantener largos tiempos de operación de
la unidad, es necesario retardar la formación de incrustaciones sobre las superficies de transferencia de calor,
para lo cual se usa un proceso químico anti-incrustante. Debido a que el proceso es diseñado de un solo paso,
el agua solamente es calentada y no concentrada en el interior de los tubos de intercambio.
Desde el punto de vista de eficiencia del proceso, lo más conveniente es alimentar el agua lo mas fría
posible, para aumentar la condensación; y calentarla lo máximo posible, para aumentar la evaporación.
Por otro lado tenemos que el uso de altas temperaturas aumenta la corrosión y la formación de incrustaciones,
fenómenos que afectan la economía del proceso debido al aumento del consumo de aditivos anti-incrustantes,
costos de manutención y calidad de materiales.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
8
CAPÍTULO 2 – FUNCIONAMIENTO DE LAS UNIDADES DESALINIZADORAS Y PURIFICADORAS.
Figura 2.2 Diagrama de flujo elemental de un equipo desalinizador y sus principales componentes asociados.
Las precipitaciones afectan el comportamiento del calentador de salmuera, el cual es observable como
un incremento de la presión del vapor en el calentador, necesaria para mantener la máxima temperatura de
diseño de la salmuera. El calentador de salmuera es diseñado con una determinada tolerancia para estas
precipitaciones, de modo que cuando el calentador está limpio la presión requerida del vapor es menor que la
presión de diseño.
A medida que las precipitaciones se van formando lentamente sobre los tubos del calentador y
disminuye la velocidad de transferencia de calor a través de los tubos, el controlador de temperatura de la
salmuera abre la válvula de vapor para permitir una mayor presión del vapor para condensar en el calentador,
lo cual significa que se está agregando una resistencia adicional causada por las incrustaciones.
De todas maneras, dentro de cierto tiempo la unidad irá perdiendo eficiencia, por lo cual deberá
sacarse de servicio para realizar una limpieza química de las superficies de intercambio de calor, para eliminar
las sales incrustadas en ellas.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
9
CAPÍTULO 2 – FUNCIONAMIENTO DE LAS UNIDADES DESALINIZADORAS Y PURIFICADORAS.
Por lo tanto, a medida que se forman las incrustaciones, la planta puede ser automáticamente
mantenida, pero la presión del vapor lentamente irá aumentando. Si esto se permite que progrese
indefinidamente, la precipitación continuará hasta formar una acumulación tal que bloqueará la transferencia de
calor.
Las precipitaciones pueden alcanzar también a los tubos condensadores. Estas precipitaciones se
manifiestan en un aumento de la diferencial de presión a través de los tubos. A medida que va ocurriendo la
precipitación sobre los tubos, se hace necesario abrir la válvula de control de flujo a la salida del calentador
para mantener la producción requerida también debería alcanzarse. Una disminución en la presión de la
salmuera a la salida del calentador.
Como regla general, estas unidades deberían ser detenidas para ser limpiadas cuando la producción
máxima haya bajado hasta un 90% de su capacidad de diseño, ò cuando la presión en el calentador haya
aumentado hasta un punto tal que la temperatura de condensación sea 5ºC mayor que la de diseño,
aproximadamente.
La limpieza química de la unidad consiste en la circulación de una solución diluida de ácido sulfúrico a
través de las áreas de transferencia de calor, mezclada con una solución de un inhibidor de corrosión, el cual
evita cualquier efecto corrosivo del ácido sobre los materiales de la unidad.
Las gotas de salmuera son removidas desde el vapor por medio de demisters (separadores de gotas) y
el vapor puro condensa sobre los tubos condensadores. El proceso de destilación opera desde un bajo vacío
en la primera etapa hasta un alto vacío en la última etapa, donde la diferencial de presión es la clave para
conseguir el flash sucesivo.
2.1.4
Proceso de Desalinización.
El agua de mar alimentada a las unidades desalinizadoras es tomada desde el cabezal de retorno de
agua de mar, a una temperatura aproximada a los 25 ºC y a una presión cercana a 0.8-0.9 Kg/cm2, filtrada en
las unidades F-602-A/B/C y
descargada a las unidades X-604-A/B (unidades desal) mediante las bombas
reforzadoras P-610-A/B, de las cuales una estará en servicio normalmente y para graficar lo anterior se toma
como ejemplo la configuración del Tren II. Las Figuras 2.3 y 2.4 muestran las unidades desalinizadoras y los
principales equipos involucrados en el proceso. Para las unidades del Tren III la configuración es similar.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
10
CAPÍTULO 2 – FUNCIONAMIENTO DE LAS UNIDADES DESALINIZADORAS Y PURIFICADORAS.
2201-JA/JB/JC/JD
PLANTA I
Tren I
E-601
F.C.W.
E-110
P-606
F-602 A/B/C
3P-708-A/B/C
TV-6840
Tren III
Entrada agua de mar
Salida Salmuera
P-610
PV-6824
PV-6636
PLANTA
DESALINIZADORA
TREN I
2203-J/JA
Retorno agua mar
CIRCUITO SISTEMA DE AGUA DE MAR PLANTA I - II
Figura 2.3 Unidades Desalinizadoras conectadas al circuito de agua de mar de Planta 2.
EYECTORES
SECUNDARIOS
VAPOR DE
MEDIA PRESIÓN
EYECTORES
PRIMARIOS
ANTIFOAM
XV-6780
ANTISCALE
HOGGINS
ANTIFOAM ANTISCALE
Pumps
TCV-6746
VAPOR DE
BAJA PRESIÓN
E-607B
Desuperheater
E-607A
Inter Condenser
After Condenser
Sea water feed
FCV-6707
1
2
3
4
5
6
7
8
9
10 11
12
BRINE HEATER
HCV-6784
HCV-6782
AIT-6760
LCV-6710B
LCV-6710A
P-613
LCV-6716
P-614
Condensate
Pump
Tk. DESAL
TREN I
Blowdown
Pump
Condensate
Dump
LCV-6714B
LCV -6714A
Agua
Potable
Destillate
Dump
Blowdown
out
AIT-6783
P-615
Destillate
Pump
PLANTA DESALINIZADORA
Figura 2.4 Diagrama de flujo de la unidad Desalinizadora.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 2 – FUNCIONAMIENTO DE LAS UNIDADES DESALINIZADORAS Y PURIFICADORAS.
11
Antes de ingresar a las unidades, el agua de mar es químicamente tratada con productos antiincrustantes (anti-scale) y anti-espumantes (anti-foam), los que son inyectados desde unidades de dosificación
individuales. Una fracción del agua descargada por las bombas es desviada antes de ser tratada y alimentada
a los condensadores (inter/after) del sistema de eyectores.
El agua de mar tratada es bombeada a través de los tubos del condensador desde la última etapa (1)
hasta la primera etapa (12), previo control de la temperatura de alimentación a la última etapa, el que se
consigue tomando una fracción de agua de mar fresca desde el cabezal de suministro.
A medida que el agua fluye a través de los tubos, es progresivamente calentada en cada una de las
etapas por medio del vapor separado desde la salmuera y que va condensando sobre la superficie externa de
2
los tubos. El agua de mar sale de los tubos a 1Kg/cm y 88ºC. Para lograr el calentamiento final hasta la
temperatura terminal el agua pasa a través de los tubos del Calentador de Salmuera, que es un intercambiador
de tubo y carcasa de dos pasos montado cerca de la etapa 1, donde el agua pasa por el lado de los tubos y el
2
vapor por el lado de la carcasa. Vapor de baja presión (3.2 Kg/cm y 200ºC), previamente enfriado hasta su
punto cercano a la saturación, es usado como agente calórico en el intercambiador de la alimentación. Se debe
evitar aumentar la temperatura en el calentador de salmuera por sobre la de diseño, 105ºC.
El agua de mar caliente (0.9 Kg/cm2 y 100ºC), desde ahora denominada salmuera, es dirigida a la
última etapa en donde alcanza el punto de saturación a la presión de la etapa, produciéndose la separación del
vapor (flash). La salmuera fluye sucesivamente desde la última hasta la primera etapa, con las consiguientes
separaciones de las fracciones de vapor, y finalmente descargada desde la última etapa por medio de la
bomba de salmuera P-614, al retorno de agua de mar (SWR).
El condensado producido en el calentador de salmuera, a 100ºC, fluye al estanque acumulador de
condensado y posteriormente descargado, mediante la bomba de condensado P-613, para mezclarse con el
destilado producido. Una fracción del condensado se usa en el desrecalentador (desuperheater) del vapor de
entrada.
El perfil de presiones y temperaturas logrado en cada una de las etapas permite que la salmuera se
separe (flashee) y el vapor separado, que es condensado en cada una de las etapas con el agua fría que fluye
por los tubos condensadores, es colectado en un canal localizado debajo de los tubos condensadores. El
destilado fluye desde una etapa a la otra (nuevamente por el hecho que pasa desde una etapa de menor
presión) por medio de dichos canales, hasta llegar a la última etapa. Desde aquí el destilado, a 39ºC, es
tomado por la bomba de destilado P-615 y descargado hasta el estanque de almacenamiento de agua
desalinizada.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
12
CAPÍTULO 2 – FUNCIONAMIENTO DE LAS UNIDADES DESALINIZADORAS Y PURIFICADORAS.
Una fracción del destilado es desviada como alimentación al estanque de agua potable del complejo y
como agua de sello para las bombas P-613/P-614/P-615.
Tanto los sistemas de condensado como de destilado incorporan un monitoreo de calidad, por medio
de un análisis de conductividad en línea. Cuando el valor de conductividad sea mayor a los límites fijados para
la calidad de ambos flujos, los productos serán desviados al cabezal de retorno de agua de mar. Existe además
una indicación de la conductividad del flujo promedio en la línea común hacia el estanque de almacenamiento,
para prevenir su contaminación. El agua desalinizada sale al estanque a un promedio de 51ºC.
Desde las etapas 1,2 y 12 salen líneas de venteo de 2” desde las cuales es posible, por medio de los
eyectores EJ-602A/B y EJ-603A/B, retirar los gases no condensables liberados en cada etapa, y
posteriormente venteados a la atmósfera.
El eyector de primera etapa EJ-602A/B, remueve la mezcla de vapores desde la última etapa del
evaporador al Inter-condenser, éste reduce la carga al eyector de segunda etapa al condensar más vapor
venteado desde las etapas 1, 2 y 6 que son descargados al eyector de primera etapa.
El eyector de segunda etapa EJ-603A/B remueve la mezcla de vapores desde el Inter-condenser al
after-condenser. El after-condenser reduce el venteo final de la mezcla de vapor de agua y gases no
condensables (es decir, reducen el venteo a la atmósfera al mínimo). El after-condenser actúa además como
silenciador.
Los condensadores son del tipo tubo y carcaza, donde el agua de mar proveniente de la alimentación a
la desal fluye por el lado tubos hacia la línea de eliminación de salmuera. Los gases venteados entran por el
lado carcaza y condensan.
El venteo de 3” comunicado al eyector de partida (“Hogging”) permite hacer el vacío necesario para
2
poner en servicio la unidad (0.05 Kg/cm en la etapa 12 en operación normal), previo paso por un silenciador.
El vapor de media presión, agente motriz de los eyectores es suministrado desde el cabezal de MP.
3
3
Cada unidad está diseñada para producir aproximadamente 57 m /h de destilado y 16 m /h de
condensado.
Cada una de las unidades posee un sistema individual de dosificación de productos químicos antiincrustantes y anti-espumantes. Ambas sustancias son bombeadas desde la unidad de preparación /
dosificación hasta la línea de alimentación de agua de mar a la última etapa.
En anexo F, se puede observar todo el proceso de la unidad desalinizadora a través de los P&ID
(Process and Instrumentation Diagram).
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
13
CAPÍTULO 2 – FUNCIONAMIENTO DE LAS UNIDADES DESALINIZADORAS Y PURIFICADORAS.
2.1.5
Control de la Unidad.
2.1.5.1
Ø
Lazos de Control e Instrumentación Asociada.
Control de flujo de agua de alimentación.
1
FIC
6707
Entrada agua de mar desde P-610
Salida destilado hacia P-615
Objetivo: Controlar el flujo de alimentación de agua de mar a las unidades.
Funcionamiento: El flujo del agua alimentada se mide a la entrada de las unidades y alimenta al controlador
FIC-6707 el que posee un setpoint fijado por el operador para determinar la carga de agua a la unidad. De
acuerdo con esto el controlador envía una señal de control a la válvula FCV-6707, para ajustar el flujo
requerido.
Consideraciones especiales: Lazo de control asociado a un interlock de bajo-bajo flujo de alimentación.
Ø
Control de temperatura de la salmuera alimentada a la 1a etapa.
Entrada agua de mar desde P -610
Brine
Heater
TIC
6746
H
TY-6746
1
Objetivo: Controlar la temperatura de la salmuera alimentada a la la etapa de evaporación.
Funcionamiento: La temperatura de la salmuera se mide a la salida del calentador de salmuera y alimenta al
controlador TIC-6746, el que envía una señal de control a la válvula TCV-6746, la que ajusta el flujo de vapor
de baja presión alimentado al calentador de salmuera, para mantener la temperatura requerida.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
14
CAPÍTULO 2 – FUNCIONAMIENTO DE LAS UNIDADES DESALINIZADORAS Y PURIFICADORAS.
Ø
Control de nivel de salmuera
1
FIC
6707
Entrada agua de mar desde P-610
LIC
6716
Objetivo: Controlar el nivel de salmuera en las etapas evaporadoras.
Funcionamiento: El nivel de salmuera se mide en la etapa número 12 y alimenta al controlador de nivel LIC6716, el que enviará una señal de control a la válvula LCV-6716, ubicada a la descarga de la bomba de
salmuera P-614-A/B. El controlar el nivel en la última etapa asegura un correcto inventario de líquido en todas
las etapas, y garantiza una adecuada succión para la bomba de salmuera. Una fracción del flujo de salmuera
es recirculado a la unidad junto con el agua de mar alimentada, mediante un controlador de ajuste manual,
HIC-6784.
Ø
Control de nivel de destilado.
Entrada agua de mar desde P-610
H
L
AI
6783
LCV
6714
XV
6714A
XV
6714B
a retorno de agua de mar
Objetivo: Controlar el nivel de destilado en las etapas evaporadoras.
Funcionamiento: El nivel de destilado se mide en la etapa número 12 y alimenta al controlador de nivel LIC6714, el cual enviará una señal de control, a la válvula LCV 6714, ubicada a la descarga de la bomba de
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
15
CAPÍTULO 2 – FUNCIONAMIENTO DE LAS UNIDADES DESALINIZADORAS Y PURIFICADORAS.
destilado P-615-A/B. El controlar el nivel en la última etapa asegura un correcto inventario de líquido en todas
las etapas, y garantiza una adecuada succión para la bomba de destilado.
Cuando la conductividad del destilado se mantiene dentro de los valores permitidos, la válvula XV -6714A
dirigirá el producto hacia el estanque de almacenamiento de agua desalinizada. En cambio, cuando la
conductividad excede los límites permitidos, el producto es desviado (dampeado) hacia el retorno de agua de
mar, abriendo la válvula XV -6714B y cerrando la válvula XV -6714A. Una fracción del flujo del destilado es
derivado hacia el sistema de agua potable del complejo
Consideraciones especiales: Lazo de control asociado a un interlock que permite, de acuerdo a un análisis de
conductividad, desviar el destilado hacia el retorno ante la presencia de cualquier producto contaminado.
Ø
Control de Nivel de Condensado.
H
L
AI
6781
XV
6781A
Destilado a almacenaje
LCV
6710
XV
6781B
Salmuera a retorno de
agua de mar
Objetivo: Controlar el nivel de condensado en el calentador de salmuera.
Funcionamiento: El nivel de condensado se mide en el acumulador de condensado del calentador de salmuera
y alimenta al controlador de nivel LIC-6710, el cual enviará una señal de control a la válvula LCV-6710, ubicada
a la descarga de las bombas de condensado P-613-A/B. Cuando la conductividad del condensado se mantiene
dentro de los valores permitidos, la válvula XV -6781A dirigirá el condensado hacia el estanque de
almacenamiento de agua desalinizada. En cambio, cuando la conductividad excede los límites permitidos, el
producto es dampeado hacia el retorno, abriendo la válvula XV -6781B y cerrando la válvula XV -6781A. Una
fracción del flujo de condensado es desviado para ser usado como agente saturador del vapor en el
desrecalentador del vapor de baja presión.
Consideraciones especiales:
Lazo de control asociado a un interlock que permite, de acuerdo a un análisis
de conductividad, desviar el condensado hacia el retorno, cualquier producto contaminado.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
16
CAPÍTULO 2 – FUNCIONAMIENTO DE LAS UNIDADES DESALINIZADORAS Y PURIFICADORAS.
Operación
Normal
Low Alarm
High Alarm
Pump Start
Salmuera
%
Destilado
%
Condensado
%
300 mm debajo del piso del
piso del estanque.
48
Media altura del recipiente de
destilado.
29
200 mm sobre el fondo del
recipiente.
24
600 mm debajo del piso del
estanque.
150 mm arriba del piso del
estanque.
150 mm sobre el punto normal
de operación.
29
Línea media de la conexión de
salida del destilado.
Fondo de los tubos.
3
Fondo
del
recipiente
condensado.
Fondo del estanque.
5
150 mm sobre el punto normal
de operación.
47
75
58
57
de
150 mm sobre el punto normal
de operación.
95
52
Tabla 2.3. Set-points, controles de niveles .
2.1.5.2
Ø
Interlocks y Lógicas de Trip.
Identificación: I1, FALL-6707A
Descripción: Bajo-bajo flujo de suministro de agua de mar a la unidad evaporadora.
Objetivo: Asegurar el suministro mínimo de agua de mar para la unidad.
Funcionamiento: El flujo de suministro de agua de mar es medido a la descarga de las bombas P-610A/B, en el indicador FI-6707, desde el cual, cuando se alcanza el setting de bajo-bajo flujo, se activa la
detención automática de la unidad, cerrando la válvula de admisión de agua FCV6707 y la válvula de
admisión de vapor al calentador de salmuera TCV6746.
Setting: 140000 Kg/h.
Ø
Identificación: I2, FALL-6705A
Descripción: Bajo-bajo flujo de suministro de agua de mar a los condensadores del sistema de
eyectores.
Objetivo: Asegurar el suministro mínimo de agua de mar para los condensadores del sistema de
eyectores.
Funcionamiento: El flujo de suministro de agua de mar se mide a la entrada de los condensadores en
el indicador FI-6705, desde el cual, cuando se alcanza el setting de bajo-bajo flujo, se activa el cierre
automático de la válvula de admisión de vapor de media presión a los eyectores, XV -6780.
Setting: 25000 Kg/h.
Ø
Identificación: I3, AIH-6761B
Descripción: Alta conductividad del condensado
Objetivo: Evitar la contaminación del agua desalinizada.
Funcionamiento: La conductividad del condensado se mide a la descarga de la bomba de condensado
e indicada en el elemento AI-6781A. Cuando el valor de conductividad iguala ò exceda el valor límite
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
17
CAPÍTULO 2 – FUNCIONAMIENTO DE LAS UNIDADES DESALINIZADORAS Y PURIFICADORAS.
establecido se activa una señal para desviar al condensado hacia el retorno de agua de mar, cerrando
la válvula XV6781A hacia el estanque de almacenamiento de agua desalinizada y abriendo la válvula
XV6781B hacia el retorno de agua de mar. Cuando la conductividad está bajo el set-point por 30
segundos, las válvulas operan en forma inversa. El switch implementado en el software, permite la
operación automática de las válvulas (AUTO) basada en la medición obtenida desde el AIT-6781, o una
operación manual, que permite desviar en cualquier momento el condensado al retorno, (MANUAL).
Setting: 20 mmho.
Ø
Identificación: I4, AIH-6783B
Descripción: Alta conductividad del destilado
Objetivo: Evitar la contaminación del agua desalinizada.
Funcionamiento: La conductividad del destilado es medida a la descarga de la bomba de destilado e
indicada en el elemento AI-6783A. Cuando el valor de conductividad iguale ó exceda el valor lìmite
establecido se activa una señal para desviar al producto hacia el retorno de agua de mar, cerrando la
vàlvula hacia el estanque de almacenamiento de agua desalinizada XV6783A y abriendo la válvula de
descarga hacia el retorno de agua de mar XV6783B. El switch implementado en el software, permite la
operación automática de las válvulas (AUTO) basada en la medición obtenida desde el AIT-6783, o una
operación manual, que permite desviar en cualquier momento el condensado al retorno, (MANUAL).
Setting: 20 mmho.
Ø
Identificación: I5, AIH-6783B
Descripción: Detención de bomba de salmuera.
Objetivo: Evitar la contaminación del agua desalinizada e inundación de la unidad.
Funcionamiento: Si la bomba de salmuera P-604 se detiene, se cerrará la válvula de entrada de agua
de mar a la unidad FV6707. A este interlock se le puede activar un bypass a la partida de la unidad
usando el HS-6707 A/B.
Setting: Stop P-614.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
18
CAPÍTULO 2 – FUNCIONAMIENTO DE LAS UNIDADES DESALINIZADORAS Y PURIFICADORAS.
2.2
Unidad Desmineralizadora, Polisher.
2.2.1
Descripción General.
El sistema de desmineralización, consiste principalmente en tres estanques desmineralizadores
3
diseñados para un flujo máximo de servicio de 170 m /hr. Adicionalmente cuenta además con una estación de
ácido y soda cáustica más un ventilador que se usa en el proceso de regeneración de la unidad. La Figura 2.5
muestra un esquema simplificado de la conexión de un Polisher, se muestra un solo estanque para simplificar
la unidad. La configuración completa de la unidad se puede ver en el apéndice A P&ID´s.
Estanque
de Soda
Entrada agua
XV-1043
XV-1045
XV-1047
Drenaje agua
XV-1010
FCV-1031
Línea Soda
Resina anionica
Agua Demin
Estanque
de Acido
PCV -1049
XV-1046
Drenaje
Línea de aire
Vapor LS
XV-1012
XV-1044
XV-1050
Línea Acido
XV-1048
Resina cationica
Drenaje
POLISHER
Figura 2.5 Esquema simplificado de un Polisher, o unidad desmineralizadora.
2.2.2
Principales Equipos Asociados a la Unidad.
El sistema comprende los siguientes equipos mayores:
Ø
Tres estanques de limpieza con las camas de mezclas, montadas en una sola unidad.
Ø
Un sistema de ácido completo para el proceso de
regeneración, más bombas de suministros y
estanque de almacenamiento.
Ø
Un sistema de soda cáustica completo para el proceso de regeneración, más bombas de suministros y
estanque de almacenamiento.
Ø
Dos ventiladores de mezcla para el proceso de regeneración.
Ø
Un panel de control local con un PLC e interfaz HMI incorporado.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 2 – FUNCIONAMIENTO DE LAS UNIDADES DESALINIZADORAS Y PURIFICADORAS.
2.2.3
19
Funcionamiento de la Unidad Desmineralizadora.
Toda agua posee sustancias variadas, agrupadas en sólidos suspendidos (removidos por filtración, por
ejemplo), sólidos disueltos (removidos por desalinización, desmineralización, etc), y gases disueltos (removidos
por desaireación).
En el caso de los sólidos disueltos, el agua posee concentraciones variables de sales disueltas que se
disocian en el agua, formando partículas cargadas llamadas iones. La desmineralización es el proceso de
extraer sales minerales inorgánicas del agua por medio de intercambio de iones, o sea, cambiando el ion más
deseable por el menos deseable. Remover estas sales minerales es importante para:
Ø
Evitar las incrustaciones a elevadas temperaturas y presiones.
Ø
Evitar la corrosión.
La desmineralización involucra dos reacciones de intercambio iónico, a saber:
i)
Cationes, tales como calcio, magnesio y sodio, pueden ser disueltos por un intercambio iónico.
Esto ocurre en un intercambiador Catiónico.
ii)
Aniones, tales como sulfato, sílica, carbonato y cloruro, pueden ser disueltos por un intercambio
aniónico. Esto ocurre en un intercambiador catiónico.
Se usan resinas de intercambio, que son polímetros sintéticos con forma esférica que poseen un ion
migratorio y un contra ion estacionario. El ion migratorio tiene la particularidad de intercambiarse por otro ion
mediante el mecanismo de selectividad. Sí el ion migratorio es un anión, la resina de intercambio se denomina
aniónica, extrae del agua los aniones (-), tales como el sulfato, cloruro y sílice. Si es catión, la resina de
intercambio se denomina catiónica y extrae del agua los cationes (+), tales como calcio, magnesio y sodio.
El purificador de condensado, trata el condensado de vapor y le remueve los iones que han sido adquiridos
durante el cliclo del agua. El purificador de condensado es una cama mezcladora, la cual contiene las resinas
catiónicas y aniónicas contenidas dentro de un estanque. En servicio, las resinas están mezcladas en las
camas, Cuando el agua pasa a través de la cama de resinas se produce una sola reacción casi simultánea e
irreversible, produciendo agua con pureza casi teórica.
2.2.4
Proceso de Desmineralización.
El sistema de producción de agua para la producción de vapor, consiste en 3 unidades de
desionización de cama mixta, cada una diseñada para un flujo máximo de 170 m3/h de agua desmineralizada.
Ésta luego de almacenarse en el estanque T-601, se usa como agua de reposición para el des-aireador V-603.
La figura 2.6 presenta una vista de éste proceso, donde se ha simplificado la unidad Polisher, por un único
estanque.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
20
CAPÍTULO 2 – FUNCIONAMIENTO DE LAS UNIDADES DESALINIZADORAS Y PURIFICADORAS.
El flujo de agua hacia los polishers proviene de dos corrientes:
Ø
Del estanque de agua desalinizada, a través de la bomba P-612. El flujo de agua desalinizada es
controlado por la válvula LV-6510 de acuerdo al nivel del estanque T-601. Actualmente se usa para
controlar la carga hacia los Polishers en modo manual.
Ø
Del condensado del proceso que pasa por el enfriador E-604 (intercambiador de calor con FCW),
proveniente del limpiador de condensado de proceso C-601. El flujo es controlado por la válvula LV6111 de acuerdo al nivel del decarbonator y enviado a través de las bombas P-603 A/B.
También puede llegar condensado de vapor alineado a la corriente normal que va al T-601 hacia Polishers.
Este condensado proviene desde el Condensador de superficie E-601 y del condensador E-701.
Tk AGUA
DESAL
TREN III
Condensado
2002-J/JA
P V-6120
Vapor LLP
C-601
E-603
CLOSE
LV-6510
P-612
F V-6100
Línea soplado
Entrada agua
E-604
Drenaje
E-601
P-603
P-604
E-701
Línea Soda
By Pass
Dumping
OPEN
Resina anionica
P-701
Drenaje
Línea de aire
Salida agua
XV-6485A
Línea Acido
T- 601
Resina
Cationica
A PISCINA RED
CONTRA INCENDIO
V-603
XV-6485B
P-605
Drenaje
ALIMENTACIÓN Y SALIDA DE CONDENSADO A TRAVES DE POLISHER
Figura 2.6 Diagrama de Flujo de circuito de agua a través de un Polisher.
Los flujos combinados de todas las fuentes de agua hacia Polishers, entran a los recipientes de
intercambio iónico por el tope, bajando a través de las resinas por un distribuidor interno, y sale de los
intercambiadores por una trampa de resina y recolector interno en el fondo del recipiente. La pureza del agua
tratada es monitoreada en cada polisher por los analizadores de conductividad AI-6465/6466/6467 y los
analizadores de pH ASH/ASL 165 A/B/C. El agua desmineralizada es enviada al estanque T-601 a través de la
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
21
CAPÍTULO 2 – FUNCIONAMIENTO DE LAS UNIDADES DESALINIZADORAS Y PURIFICADORAS.
válvula XV6485A. En la línea de salida común a los tres Polishers, existen los analizadores de conductividad
AI-6468 A/B que monitorean la calidad del agua hacia el T-601, desviando el agua desmineralizada hacia la
piscina de la red contra incendios 2404-A a través de la válvula XV -6485B si la conductividad es muy alta de
acuerdo con los parámetros de diseño. Todo lo anterior puede apreciarse en el apéndice A, P&DI´s.
2.2.4.1
Regeneración.
El ciclo de vida de un Polisher se determina de acuerdo a un alto nivel de conductividad del agua
desmineralizada o de horas de operación, lo que indica que se ha agotado la capacidad de intercambio útil.
El ciclo de regeneración repone la reserva de ácido en la resina de intercambio catiónica, usándose
ácido sulfúrico. Éste extrae los cationes acumulados de cálcio, magnesio, sodio u otros cationes y a cambio
libera una cantidad equivalente de cationes de hidrógeno, lo cual restaura la resina de cationes a su estado de
hidrógeno original.
La resina de intercambio de aniones, es regenerada con soda cáustica. Ésta extrae los aniones
acumulados en forma de sales solubles y restaura la resina de aniones a su estado de hidróxido original.
El ciclo de regeneración trabaja en forma automática, vigilado por temporizadores de pasos
individuales, no permitiendo regenerar más de un Polisher a la vez. Las bombas de ácido y soda no partirán
hasta que se haya establecido un flujo mínimo de agua de dilución y se detendrán si están fuera de los límites
de flujo pre-establecidos. Los temporizadores de paso de soda y ácido no correrán si las bombas de inyección
no están en operación. Las válvulas solenoides neumáticas pueden ser usadas en forma manual si falla el
sistema de control o energía que las alimenta.
2.2.4.2
Factores que Afectan la Regeneración.
Ø
Mala ubicación de la interfase que está entre la resina aniónica (tope) y la resina catiónica (fondo).
Ø
Disminución del flujo y/o concentración de los regenerantes.
Ø
Baja temperatura durante la regeneración.
Ø
Mal enjuague de las resinas.
2.2.4.3
La
Tabla
Proceso de Regeneración.
2.1
muestra
los
pasos
del
proceso
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
de
regeneración
de
la
unidad
desmineralizadora.
Angel Oyarzo / 2005
CAPÍTULO 2 – FUNCIONAMIENTO DE LAS UNIDADES DESALINIZADORAS Y PURIFICADORAS.
22
Tabla 2.1 SECUENCIA DEL PROCESO DE REGENERACIÓN.
Paso
1
2
Tiempo (min)
0.5
25
Descripción del Proceso
Cierre válvula sin flujo.
Lavado en reverso:
Se usa para separar las resinas. 27.4 m3/hr de agua desmineralizada entra al
recipiente en contra flujo (hacia arriba). Esta agua de lavado sale desde el tope
del recipiente hacia la fosa de neutralización.
La cama se expende y las resinas mezcladas son separadas en una cama superior
(aniones) y una cama inferior (cationes ) de acuerdo a la diferencia de densidades
y distribución de los tamaños de las partículas.
3
5
Asentamiento de la cama:
Una vez cortado el flujo de lavado en reverso (cerradas todas las válvulas), la resina se deja
asentar formando un nivel de cama de resina de cationes en el fondo y un nivel de cama de
resina de aniones como nivel superior. Finalizando el asentamiento, se puede observar
claramente la interfaz entre camas en el indicador de nivel local del recipiente (level glass).
4
3
5
25
Confirmación del flujo de agua de dilución:
El agua de dilución proveniente del estanque de agua demin que sale de las desaragas de las
bombas P-605 A/B se divide en dos flujos:
- Flujo de agua demin para la dilución de ácido es medido por el FI-6401 (15 m3/h).
- El flujo de agua demin para la dilución de soda (previamente calentada a 49°C por intercambio
de calor con vapor de baja presión), es medido por el FIC6400 (6.9 m3/h) y mezclada con soda en la
T de soda, para obtener una solución al 4% (medida en el AI-6460) para la regeneración de la resina
de aniones.
Introducción de ácido al 5% (regeneración de cationes) y precalentamiento de la resina de aniones:
- 15 m3/h de agua demin medido en el FI-6401 se mezcla en la T de mezcla de ácido con 0.44 m3/h
app de ácido sulfúrico al 98%, para formar una solución al 5% de ácido (medida en el AI-6461), la
cual es introducida en el fondo del recipiente para fluir corriente arriba a través de la resina de
cationes y regenerarla.
- 6.9 m3/h de agua demin precalienta la resina de aniones hacia el fondo del polisher pasando a
través de la resina de aniones.
- El desecho del regenerante de cationes y el agua de dilución de precalentamiento pasa a través
del recolector de interfaz y va hacia la piscina de neutralización.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Válvula
XV-1017
XV-1012
XV-1014
Observaciones.
Flujo max. Según
piping: 39.5 m3/hr.
XV-1012
XV-1010
XV-1015
Dilución de soda a
49°C.
XV-1012
XV-1010
XV-1015
Desecho a piscina
de neutralización.
Bomba de ácido
E/S.
Angel Oyarzo / 2005
CAPÍTULO 2 – FUNCIONAMIENTO DE LAS UNIDADES DESALINIZADORAS Y PURIFICADORAS.
6
60
7
16
8
23
Introducción de soda al 4% (regeneración de aniones) y desplazamiento del ácido:
- 6.9 m3/h de agua demin, medidos en el FIC-6400 y a 49°C, se mezclan en la T de mezcla de
soda con 1.04 m3/h de soda caustica al 32%, para formar una solución al 4% de soda caustica, pasando hacia el fondo a través de la resina de aniones.
- 15 m3/h de agua demin de dilución en contracorriente (hacia arriba), desplazan las sustancia químicas del regenerante de cationes (paso del ácido a través de la cama de cationes).
- El desecho del regenerante de aniones y el flujo de agua de desechos de ácido fluirán a través del
recolector de interface y van hacia la piscina de neutralización.
Desplazamiento de Soda cáustica y enjuague de cationes:
- 15 m3/h de agua demin de dilución continua hacia arriba a través de la cama de aniones para el
enjuague de cationes.
- 6.9 m3/h de agua demin de dilución continua hacia abajo, a través de la cama de cationes, para
el anjuague de aniones.
- El agua de desecho pasa a través del recolector de interfaz y va hacia la piscina de neutralización.
XV-1012
XV-1010
XV-1015
Desecho a piscina
de neutralización.
Bomba de ácido
E/S.
XV-1012
XV-1010
XV-1015
Desecho a piscina
de neutralización.
30
Enjuague de aniones – Enjuague de cationes:
- 15 m3/h de agua demin continua desde el fondo del recipiente hacia arriba a través de la resina de
cationes.
- Se abre la válvula de entrada de alimentación del polisher (agua desal) XV -1009 para enjuagar la
resina de aniones por medio del flujo normal (52.3 m3/h) hacia abajo a través de la cama.
- El agua de enjuague fluye a través del recolector de interfaz y va hacia la piscina de neutralización.
XV-1012
XV-1015
XV-1009
Desecho a piscina
de neutralización.
9
0.5
10
6
Drenaje
Cierre de válvula:
- Sin flujo.
Drenaje:
El agua es drenada hasta aproximadamente 150 mm sobre la cama de resina. El conmutador de
nivel ubicado 152 mm sobre la línea media del centro del polisher (LS-1008), finalizará el paso del
drenaje. El agua es drenada a la fosa de neutralización.
XV-1016
XV-1013
Desecho a piscina
de neutralización.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 2 – FUNCIONAMIENTO DE LAS UNIDADES DESALINIZADORAS Y PURIFICADORAS.
24
11
1
Elevación de la cama:
27.4 m3/h de agua demin para dilución de ácido es dirigida desde el fondo hacia arriba para
expandir la cama y premezclar las resinas de aniones y cationes.
XV-1012
XV-1013
12
0.5
Enjuague y mezclado de la resina con aire y agua:
- 27 m3/h de agua demin continua por otros 30 seg.
- El soplador de aire comienza a suministrar aire (459 m3/h) hacia el fondo de la cama de la resina
para mezclarla.
- El aire es venteado hacia la atmósfera desde la parte superior del polisher.
XV-1012
XV-1011
XV-1013
Soplado E/S.
13
15
Mezcla de Aire:
Se cierra el flujo en reversa del agua y continúa el mezclado de aire.
XV-1011
XV-1013
Soplado E/S.
14
4
Asentamiento:
Se apaga el soplador de aire y se permite que la cama de la resina mezclada se asiente, drenando
parcialmente el agua a la fosa de neutralización.
XV-1015
XV-1013
Desecho a piscina
de neutralización.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 2 – FUNCIONAMIENTO DE LAS UNIDADES DESALINIZADORAS Y PURIFICADORAS.
25
15
30
Llenado lento:
El agua de dilución de soda cáustica fluye desde la parte superior del polisher para comenzar a
llenarlo. La válvula de venteo permanece abierta para ventear el aire.
XV-1012
XV-1013
16
10
Enjuague de desechos:
El agua desal mas el condensado de proceso continúan entrando al polisher, bajando a través de
la resina mezclada para completar la extracción de las sustancias químicas del regenerante. El
agua de enjuague va hacia la piscina de neutralización.
ACTUALMENTE ETAPA ELIMINADA.
XV-1009
XV-1016
Drenado a piscina
de neutralización.
17
4
Verificación de la conductividad del enjuague:
El flujo del enjuague (52.3 m3/h), continúa por 4 minutos para verificar un nivel aceptable de
conductividad del efluente del polisher, indicada por los analizadores AI-6465/66/67
XV-1009
XV-1016
Drenado a piscina
de neutralización.
Tabla 2.1 Proceso de Regeneración del Polisher.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
26
CAPÍTULO 2 – FUNCIONAMIENTO DE LAS UNIDADES DESALINIZADORAS Y PURIFICADORAS.
2.2.4.3
Conductividad.
Los analizadores de conductividad se utilizan para medir la calidad del agua, de manera de determinar
el agotamiento de las camas des-ionizantes. La conductividad eléctrica de una solución es una medida de
todos los iones presentes. Este instrumento mide el valor absoluto conocido como “resistencia específica”, en
ohms. La resistencia promedio específica de una fuente de agua pura, tal como el condensado, está entre
50000 y 100000 Ω. Como estos valores son muy altos, la concentración se expresa en función de la
conductancia, cuyo valor es el recíproco del anterior y se mide en mhos, típicamente en mmhos.
2.2.5
Control de la Unidad.
2.2.5.1
General.
El sistema de control original provisto consta de un PLC 984 MODICON y una interfaz HMI basada en
un IBM/PC DOS. La interfaz HMI programada entrega un acceso rápido y fácil del operador al proceso, para
acceder a todos los dispositivos del equipo, estanques, bombas, ventiladores y secuencia de regeneración;
también incluye todas las alarmas, estados y gráficos de tendencia necesarios para una operación segura y
eficiente.
2.2.5.2
Operación.
La planta está diseñada para tener dos Polishers en servicio y uno en regeneración o standby. Cuando
un Polisher está en servicio la condición del estanque es monitoreada de diversas maneras, cada Polisher
cuenta con:
a) Un sensor y transmisor de salida de conductividad.
b) Un transmisor de presión diferencial
c) Un transmisor de flujo de entrada, para monitorear el flujo de entrada y contabilizar el volumen de agua
tratada.
Cuando alguna de las medidas anteriores está fuera del rango de diseño, las alarmas son activadas.
Las siguientes alarmas requieren de una acción del operador:
Ø
Conductividad de salida alta: Indica la necesidad de regeneración.
Ø
Alta presión diferencial: Puede indicar la necesidad de un medio lavado en reverso o regeneración.
Ø
Bajo Flujo: Puede indicar la necesidad de retirar la unidad del servicio, para prevenir que se produzca
empastado en el tope del estanque. El flujo se debe mantener sobre 8.4 L/s.
Ø
Volumen Total Tratado: Indica que la unidad trabaja como está diseñada, pero el operador puede
seleccionar entre seguir operando, o comenzar la regeneración y reiniciar los totalizadores, de acuerdo
a su experiencia.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
27
CAPÍTULO 2 – FUNCIONAMIENTO DE LAS UNIDADES DESALINIZADORAS Y PURIFICADORAS.
Cuando se requiere que comience el proceso de regeneración, éste es inicializado manualmente por el
operador a través de la interfaz HMI y realizando los pasos mostrados en la Tabla 2.1. La unidad primero se
debe colocar en “Stand-by” y después comenzar la regeneración. La unidad retorna a “Stand-by” cuando la
regeneración culmina. Cuando el Polisher va a ser puesto en servicio, el operador primero debe seleccionar
“Rinse” para confirmar que los valores de conductividad y pH están dentro de los rangos de operación y
entonces se puede colocar la unidad en servicio.
2.2.5.3
Instrumentación Asociada.
1. TIS 1000
Sensor de temperatura del condensado de entrada, su valor es desplegado en la
C
pantalla de interfaz HMI, cuando la temperatura aumenta sobre 45° .
2. FQS 1001 A,B,C
Indicador de flujo local para cada Polisher, envía el valor al PLC para contabilizar el
flujo acumulado en servicio. Una acumulación superior a 10,700m3 en algún Polisher,
iniciará en el PLC la alarma de Servicio Completado y la unidad deberá ser retirada de
servicio y regenerada.
3. PDIT 1003 A,B,C
Sensa e indica la caída de presión en cada Polisher e inicia la alarma en la interfaz HMI
“Vessel Diff. Press. High”.
4. PDIT 1005 A,B,C
Mide e indica la caída de presión a través de la trampa de resina de cada Polisher e
2
inicia la alarma si ésta se incrementa sobre 1.75Kg/cm .
5. AIT 165 A,B,C
Muestrea a la salida de cada Polisher el contenido de pH. La señal análoga es
transmitida al panel local y vía interface MODBUS es enviada a todos los servicios
requeridos. Un nivel de pH sobre 0.05mg/l iniciará la alarma de “pH High”.
6. AIT 166 A,B,C
Muestrea a la salida de cada Polisher la conductividad. La señal análoga es transmitida
al panel local y vía interfase MODBUS es enviada a todos los servicios requeridos. Un
nivel de conductividad sobre 0.1 mmho/cm iniciará la alarma de “High Conductivity”.
7. LSH/L-1033
Mide el nivel del estanque de ácido. LSH indica cuando el nivel está bajo 6” desde el
tope del estanque, cierra la válvula de llenado XV1041 e ingresa una señal permisivo al
PLC que la regeneración puede ser iniciada. LL indica cuando el nivel está bajo 6”
desde el fondo del estanque de almacenamiento, detiene las bombas de ácido y alarma
el panel de operador.
8. LSH/L- 1034
Mide el nivel del estanque de soda cáustica. Opera de la misma forma descrita para el
LSH/L-1033.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
28
CAPÍTULO 2 – FUNCIONAMIENTO DE LAS UNIDADES DESALINIZADORAS Y PURIFICADORAS.
9. FIT-1031
Transmisor del loop de control de flujo de ácido diluido. El PLC sirve como controlador
de flujo, recibe y compara la señal análoga de entrada y entrega una adecuada salida
para abrir o cerrar la válvula FV1031 en modo AUTO, un retardo de tiempo programado
permite al flujo estabilizarse antes de que la alarma por bajo flujo sea iniciada y la
regeneración sea suspendida (interlock de regeneración).
10.
a) FI-1032
Flujo de soda cáustica, esta señal se utiliza para compararla con el setting de la válvula
XV1050. Si la medida del flujo cae bajo el valor especificado durante la introducción de
soda, se activará la alarma comandada por el FS1032 y la regeneración será
suspendida.
b) TIT/TCV-1038
Control de temperatura de soda diluida. La temperatura es medida por medio del
TIT1038, la señal análoga ingresa al PLC, que actúa como controlador de temperatura,
y envía una señal de salida a la válvula TV1038 en modo AUTO, que controla la
temperatura del vapor de entrada al intercambiador de temperatura que calienta el
agua de dilución de soda. Si la temperatura se eleva por sobre los 55°C, una alarma
será iniciada en el panel de operación y sala de control.
11. AITS 164/163
Estos monitorean la cantidad de químicos diluidos durante la regeneración. La fuerza
del ácido está entre 3% y 5% H2SO4. La fuerza de la soda cáustica está limitada entre
4% y 6% NaOH. Cada uno desplegará el % de dilución durante la regeneración y si los
parámetros anteriores están excedidos, una alarma apropiada, alta o baja, se iniciará
en el panel de operación y sala de control. Las señales análogas son transmitidas al
sistema de control supervisor durante el proceso de regeneración.
2.2.5.4
a)
Panel de Control Principal.
Cada polisher es suministrado con un selector con las posiciones “Service-Standby-Rinse”.
Ø
Service: Aquí la válvula de salida del polisher es abierta, colocando la unidad en servicio.
Ø
Standby: Posición que cierra la válvula de salida, quitando la unidad del servicio.
Ø
Rinse: en esta posición se habre la válvula exterior de enjuague, para permitir el enjuague con agua de
la unidad quitando la suciedad.
b)
Cada unidad es suministrada con un pulsador “Regeneration-Start” el cual permite el inicio de la
regeneración en la unidad seleccionada.
c)
Un selector de control “Jog-Auto-Hold” permite al operador intervenir la unidad durante el ciclo
automático de regeneración para cambiar la duración de algún paso temporalmente y mantenerlo.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
29
CAPÍTULO 2 – FUNCIONAMIENTO DE LAS UNIDADES DESALINIZADORAS Y PURIFICADORAS.
Ø
La posición normal es “Auto”, entregándole el control de los pasos al PLC.
Ø
En la posición “Jog” el programa avanzará un paso en el ciclo de regeneración, cada vez que es
seleccionada esta posición.
Ø
En la posición “Hold”, el programa permanecerá en esta posición, suspendiendo los temporizadores,
hasta que sea seleccionada la posición “Auto” nuevamente.
d)
El selector “Hands-Off-Auto” es suministrado uno para cada uno de los ventiladores y las bombas de
ácido y soda. La posición normal es “Auto” permitiendo al PLC tomar el control de los motores.
e)
Se usa un botón de “Reset” para limpiar los interlocks del proceso de regeneración. Éstos podrían
ocurrir, por ejemplo, si el flujo de ácido o soda bajan demasiado. Un bajo flujo de químicos diluidos y altas
concentraciones de los mismos, podrían provocar alarmas y la regeneración podría ser suspendida en espera
de la corrección del error. El “Reset” permite reiniciar la regeneración desde el punto en que quedó suspendida.
2.2.5.5
Ø
Interlocks, Lógicas de Trip y Alarmas.
Identificación: I65, IASH-6468.
Objetivo: Evitar la contaminación del agua que está en el estanque de almacenamiento.
Funcionamiento: La calidad del agua producida por los Polishers de condensado X-605 A/B/C es
monitoreada por el analizador de conductividad (en línea) AIS-6468 A/B, si la conductividad del agua
excede los límites definidos, se activa una señal hacia las válvulas solenoides, de forma que el agua
contaminada pueda ser desviada hacia la piscina de red contra incendios 2404-A. En este caso, se
cerrará la XV -6485A (flujo de agua hacia el estanque T-601) y se abrirá la XV -6485B (flujo de agua
hacia el 2404-A).
Setting: 1.2mmho.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
30
CAPÍTULO 2 – FUNCIONAMIENTO DE LAS UNIDADES DESALINIZADORAS Y PURIFICADORAS.
Ø
Alarmas.
Las alarmas asociadas al proceso de desmineralización son las siguientes:
TAG
TAH-6440
AAH-6465/66/67
ASH-6460
ASL-6460
ASH-6461
ASL-6461
FQA-6402/03/04
PDAH-1004 A/B/C
PDAH-1006 A/B/C
FAL-6401
FAL-6400
LAL-6412
TAHH-6442
TIC-1038
LAL-6413
UA-6480
AIS-6468 A
Descripción
Alta temperatura de entrada en polishers
Alta conductividad a la salida del polisher A/B/C
Alta concentración de soda cáustica diluida
Baja concentración de soda cáustica diluida
Alta concentración ácido diluida
Baja concentración ácido diluido
Corrida de Servicio completada
Alta presión diferencial del limpiador
Alta presión diferencial trampa de resina
Bajo flujo de dilución de ácido
Bajo flujo de dilución de soda cáustica
Bajo nivel de estanque diario de ácido
Alta temperatura de dilución cáustica
Set point control de temperatura dilución cáustica
Bajo nivel de estanque diario de soda cáustica
Problema común
Alta conductividad de agua desmineralizada
1.2mmho/cm
2
AIS-6468 B
Alta conductividad de agua desmineralizada
1.2mmho/cm
2
ASH-6492 A/B/C
ASL-6492 A/B/C
Alto pH a la salida del limpiador
Bajo pH a la salida del limpiador
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Setting
C
45º
1.2 mmhos
10%
1%
10%
1%
3
13500m
2
1.5 kg/cm
2
1.5 kg/cm
3
12m /hr
3
5m /hr
152mm
C
45°
C
43°
152mm
10.6 (b,c:9)
3 (b,c:9)
Acción
Alarma
Alarma
Alarma
Alarma
Alarma
Alarma
Alarma
Alarma
Alarma
Alarma / Stop
Alarma / Stop
Alarma
Alarma
Alarma
Alarma
Alarma
Alarma / desvío a
2404-A
Alarma / desvío a
2404-A
Alarma
Alarma
Angel Oyarzo / 2005
CAPÍTULO 3
3.1
31
– COMPONENTES DEL SISTEMA DE CONTROL .
Sistema SCADA.
SCADA, es la sigla de la frase “Supervisory Control And Data Adquisition”.
Es la tecnología que le permite al usuario recolectar datos desde uno o más servicios distantes de un proceso
y, enviar instrucciones limitadas de control a aquellos servicios. Éste hace innecesaria la presencia de un
operador en el servicio requerido mientras se encuentra en funcionamiento normal, habitualmente incluye la
interfaz de operador y la aplicación relacionada.
Este sistema permite a un operador de un servicio ó proceso típicamente distante por ejemplo, realizar
cambios en los set-point de los controladores, abrir o cerrar válvulas o switches, monitorear alarmas y recoger
información de la instrumentación del proceso, además de visualizar el servicio o proceso en cuestión.
3.1.2
Elementos del sistema SCADA.
Las figuras 3.1 y 3.2 muestran los principales componentes del sistema SCADA.
Figura 3.1 Componentes principales de un sistema SCADA.
Figura 3.2 Distintas conexiones de una RTU.
El operador, accede al sistema por medio de la interfaz de operador (Operator Interfase), que algunas
veces también es llamada consola o HMI. Ésta consiste de una pantalla gráfica (VDU, Video Interfase Unit) que
muestra “en tiempo real” el proceso y un teclado que le permite al operador enviar comandos hacia el proceso.
El operador interactúa con la unidad principal del sistema (MTU, Master Terminal Unit), también
llamada “server” o “host computer”. La MTU, en los sistemas modernos, siempre esta basada en un PC, y
puede accesar al controlador y monitorear el campo. Las MTU´s deben comunicarse con las RTU´s (Remote
Terminal Unit), las cuales suelen estar ubicadas lejos del control central y cerca del proceso supervisado. Las
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 3
– COMPONENTES DEL SISTEMA DE CONTROL .
32
RTU´s recogen información desde los dispositivos de campo, mantienen esta información disponible en su
memoria hasta que la MTU pregunta por ella, entonces codifican y transmiten la información a la MTU,
adicionalmente cuando la MTU envía alguna señal de control, la RTU decodifica la información y la envía a los
elementos de control del campo para realizar la acción ordenada por la MTU, por ejemplo, ajuste de set-point,
forzamientos, etc.
Las RTU´s más modernas pueden ejecutar lógicas de control locales y sólo enviar la información
necesaria para la supervisión del proceso a la MTU y también poseen la capacidad de comunicación a través
de redes de comunicación industriales, típicamente seriales.
Hay, principalmente, dos formas de comunicación con la MTU, por líneas físicas (telefónicas,
eléctricas, ópticas) y microondas.
Las conexiones entre RTU´s y los dispositivos de campo son hechas, frecuentemente, por líneas
eléctricas (conductores eléctricos). Usualmente las RTU´s suministran la energía necesaria para el
funcionamiento de sensores y actuadores. Dependiendo de la confiabilidad del proceso puede ser necesaria
una UPS (Uninterruptible Power Supply) para asegurar la continuidad de funcionamiento del sistema ante una
falla en la alimentación principal de energía eléctrica.
SCADA es un sistema de dos vías. Con SCADA no solo es posible monitorear lo que sucede en el
proceso sino también tomar alguna acción sobre él. El control supervisor de SCADA hace posible esto ya que
posee licencias de lectura y escritura.
El control supervisor de SCADA y la limitada o intermitente comunicación entre las MTU´s y las RTU´s
hacen la diferencia entre un control supervisor SCADA y otros sistemas de control como un DCS (Distributed
Control System) por ejemplo.
Sin embargo hoy en día, con la aparición de nuevas tecnologías de comunicación, cada vez mas, los
sistemas SCADA se parecen mas a un gran DCS.
3.1.3
CITECT.
Es un sistema de software de automatización industrial que permite la optimización de las operaciones de
producción. Está basado en una arquitectura cliente-servidor, la cual le proporciona características adicionales
tales como:
Ø
manejo inteligente de datos, basado en tareas
Ø
una arquitectura ampliable y flexible, dependiendo de las necesidades del usuario
Ø
redundancia, para asegurar la continuidad del sistema ante fallas en sectores críticos.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 3
3.1.4
33
– COMPONENTES DEL SISTEMA DE CONTROL .
Elementos del Sistema CITECT.
Tres son los elementos que forman CITECT:
Ø
Arquitectura.
Ø
Gráficos.
Ø
Operaciones.
3.1.4.1
Arquitectura.
La arquitectura de CITECT funciona sobre la base de tareas, estas son:
-
E/S:
Gestiona y optimiza todas las comunicaciones.
-
Alarmas:
Monitoriza todo tipo de alarmas: análogas, digitales y SPC.
-
Informes:
Controla, programa y ejecuta operaciones de información.
-
Curvas de Tendencia: Recoge, registra, y gestiona datos de Curvas de Tendencias y SPC.
-
Visualización: La interfaz Hombre-Máquina (HMI), interconecta con otras tareas manteniendo la
visualización, regenerando datos de pantalla y ejecutando comandos.
Debido a la arquitectura de CITECT, éste puede trabajar en forma distribuida, pero también
centralizada como los sistemas SCADA tradicionales, que es la opción elegida para trabajar en este proyecto.
La tarea E/S, se encarga de la comunicación con los dispositivos E/S requerida por las otras tareas. En
este caso, la tarea de E/S hace las veces de servidor de las otras tareas. La Figura 3.3 muestra un esquema
simplificado de la arquitectura de CITECT.
CITECT
Cliente de Visualización
Petición
Cliente
Servidor de Alarmas
Servidor de Informes
Respuesta
Servidor
Servidor de Curvas de Tendencias
Servidor de E/S
BUS
Dispositivos E/S
Figura 3.3 Detalle de la arquitectura de CITECT.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 3
34
– COMPONENTES DEL SISTEMA DE CONTROL .
El servidor de alarmas, reúne y clasifica los datos en bruto solicitados al servidor de E/S. Si aparece
una lista de alarmas, el cliente de visualización solicita los datos específicos de las alarmas al servidor de
alarmas.
Al mostrarse una pantalla, la tarea de visualización (cliente) solicita los datos específicos de la tarea
E/S (servidor). El servidor E/S reúne y clasifica los datos en bruto y responde al cliente de visualización
solamente con los datos solicitados.
Los servidores de Curvas de Tendencia e Informes trabajan de la misma forma que los servidores de
E/S y de Alarmas, proporcionando datos de procesos a sus clientes. Cuando en un informe vayan incluidos
datos de Curvas de Tendencia y Alarmas, el servidor de Informes hará en realidad de cliente de los servicios
de Curvas de Tendencia y Alarmas. Cuando se ejecuta un informe, el cliente de Informes solicitará la
información necesaria al servidor correspondiente.
Todas estas tareas son independientes, realizando su propio procesamiento. Debido a esta
arquitectura, se tiene control sobre los computadores del sistema que realicen cada tarea. Por ejemplo, se
puede asignar un computador para realizar las tareas de visualización, y de informes, mientras que el segundo
computador realiza tareas de visualización, E/S, y Curvas de Tendencia. Lo anterior está visualizado
gráficamente en la Figura 3.3.
CITECT también posee una arquitectura escalable, lo que le permite crecer de acuerdo a las
necesidades, sin tener que modificar el hardware ni el software existentes, así entonces se pueden tener un
sistema sencillo, un SCADA por servicio, hasta sistemas grandes, en los cuales se pueden repartir los clientes
y las cargas de procesamiento. En las Figuras 3.4 y 3.5, se muestran dos diferentes tipos de configuración de
la arquitectura de CITECT.
Visualización, Reportes,
Tendencias, Alarmas, I/O
Figura 3.4 Configuración básica de CITECT contenida en un PC.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 3
35
– COMPONENTES DEL SISTEMA DE CONTROL .
Cliente Administración
Cliente Visualización
Servidor de Alarmas
Cliente Administración
Cliente internet
Servidor de Reportes
Cliente / Server
(Tendencias,
I/O, Internet)
Figura 3.5 Configuración de CITECT conteniendo las tareas en diferentes PC´s.
Otra característica importante de este sistema es su capacidad de soportar redundancia, tanto a nivel
de bases de datos como en el hardware. CITECT incluye soporte total para la redundancia en los Dispositivos
de E/S. Designando un dispositivo como principal y el otro de reserva, CITECT cambia automáticamente de
uno a otro, en caso de ocurrir un fallo. CITECT puede escribir los datos tanto en los Dispositivos de E/S
principales como secundarios. Se pueden utilizar una configuración redundante en dispositivos no diseñados
para redundancia.
La rotura de cables de comunicaciones y los ruidos eléctricos impredecibles son problemas de
comunicación normales. Como respuesta, CITECT permite la utilización de dos cables de comunicación
distintos (funcionamiento por separado) para cada Dispositivo de E/S. Utilizando redundancia de caminos de
comunicación, se reduce al mínimo la posibilidad de cualquier pérdida de comunicación que afecte a la
operación. En la Figura 3.6, se aprecia la configuración redundante de CITECT.
Muchos sistemas SCADA utilizan una LAN para conectar los elementos, pero la comunicación puede
perderse por algo tan simple como una tarjeta de red defectuosa. Citect proporciona una LAN con redundancia
completa. Solamente es necesario instalar dos redes (o más si se desea). Si falla la LAN principal, Citect trata
automáticamente de conectar las otras LAN disponibles no se necesita configuración. La Figura 3.7, muestra la
separación de tareas de CITECT conectado a través de una LAN.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 3
36
– COMPONENTES DEL SISTEMA DE CONTROL .
Figura 3.6 Configuraciones redundantes en CITEC.
Figura 3.7 CITECT conectado a través de una LAN.
3.1.4.2
Comunicaciones.
3.1.4.2.1
Dispositivos de Entrada y Salida (I/O Devices).
En CITECT vienen incluidos mas de 120 drivers para dispositivos de entrada – salida (I/O Devices),
estos
permiten
conectar
sobre
300
diferentes
modelos
de
I/O
devices,
a
saber:
PLC`s,
RTU`s,
microcontroladores, loop controllers, DCS cards, analizadores industriales, instrumentación, etc. Para CITECT
los I/O Devices pueden ser clasificados en dos categorías dependiendo del método de conexión utilizado: Local
o Remoto. Los del tipo Local son conectados directamente al servidor de E/S de CITECT, y los Remotos son
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 3
37
– COMPONENTES DEL SISTEMA DE CONTROL .
conectados a CITECT a través de un medio intermedio, como por ejemplo: enlaces de radio, vía MODEM y
líneas telefónicas, etc.
Las categorías mencionadas anteriormente, Local y Remoto, pueden ser sub-clasificadas en
permanentes, periódicas o por requerimiento.
3.1.4.2.2
Tipos de Comunicación.
CITECT soporta cuatro tipos de comunicaciones con los I/O Devices, a saber:
-
Comunicaciones Seriales.
-
Tarjetas de interfase para PLC`s.
-
Tarjetas de adquisición de datos.
-
DDE Server.
Independientemente si el I/O Device es local o remoto, el método más común de comunicación es el
serial. Típicamente las comunicaciones seriales siguen unos de los tres estándar comunes: RS-232, RS-422 y
RS-485. La Figura 3.8 muestra los diferentes tipos de conexiones para la comunicación con CITECT.
Figura 3.8 Distintas configuraciones de comunicación con CITECT.
3.1.4.2.3
Establecimiento de las comunicaciones.
CITECT se comunica directamente con los I/O Devices de la planta, así entonces, existes tres principales
componentes en este sistema
Ø
El computador Citect (I/O Server).
Ø
Los canales de comunicación.
Ø
Los I/O Devices.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 3
38
– COMPONENTES DEL SISTEMA DE CONTROL .
La Figura 3.9 grafica básicamente como se establece la comunicación entre CITECT y un dispositivo externo.
Canal de Comunicación
(PLC, RTU, etc)
Figura 3.9 Configuración típica entre un dispositivo de planta externo y CITECT.
Para el proyecto se optó por la opción de comunicar CITECT a cada unidad en forma local, con un
monitoreo permanente de las variables principales involucradas en el proceso, a través de comunicaciones
seriales del tipo RTU-Modbus 232.
Además de la comunicación entre CITECT y los I/O Devices físicos, CITECT cuenta con una serie de
protocolos compatibles con Microsoft, lo que le permite a este sistema comunicarse a través del intercambio de
datos con otras aplicaciones compatibles, entre las que se encuentran: ASCII, CSV, dBaseIII, RTF, etc.
Además CITECT puede funcionar como servidor OPC y ODBC, protocolos ampliamente utilizados
industrialmente hoy en día.
3.1.4.2.4
Configuración.
Cada CITECT tiene instalado el mismo software, todos cuentan con la aplicación “Computer Setup
Wizard”, la cual permite configurar y definir las tareas que Citect realizará para cada aplicación, las que se
pueden mencionar como:
Ø
Definir el Rol de la estación como: Servidor y Cliente, sólo Cliente, etc.
Ø
Especificar el proyecto o aplicación específica que correrá en la máquina.
Ø
Definir la máquina como primario o standby.
Ø
Especificar que tareas específicas correrán, Alarmas, Visualización, Reporte, etc.
Ø
Seleccionar las opciones que afectarán la apariencia de la aplicación, barras de tareas, gráficos,
botones, etc.
Ø
Definir el tipo y los protocolos de comunicación con los I/O Devices.
Ø
Definir los distintos niveles de seguridad y privilegios que se implementarán en un proyecto para las
distintas personas involucradas, operadores, supervisores, ingenieros, etc.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 3
3.1.4.2
39
– COMPONENTES DEL SISTEMA DE CONTROL .
Gráficos.
Los gráficos, denominados Interfases Hombre-Máquina (HMI Interface), son un elemento importante
dentro de un sistema SCADA, ya que a través de ellas se puede tener una idea intuitiva del proceso
supervisado. La Figura 3.10 muestra una interfaz creada en CITECT. El operador puede revisar el estado del
proceso o servicio supervisado y a través de ellas enviar las señales correctivas necesarias para él, como por
ejemplo abrir una válvula, cambiar un set-point, etc.
El potencial de los gráficos del sistema SCADA es un factor decisivo para su utilización global. Los
gráficos de Citect garantizan una interfaz de usuario intuitiva y sistemática. Los gráficos de Citect se basan en
un conjunto de objetos sencillos, como rectángulos, elipses, mapas de bits, líneas, texto, símbolos, tuberías y
otros. Todos estos objetos están asociados con un conjunto de propiedades comunes, las que permiten
vincular directamente el comportamiento del objeto a las variables de la planta. Se puede usar el movimiento, la
rotación, el tamaño, el color, el relleno, la visibilidad, etc. de cualquier objeto para tener una representación real
de las condiciones de la producción de la planta, pudiéndose asignar comandos y propiedades táctiles de
forma que el objeto pueda soportar un número de entradas por operador. Todos los objetos son interactivos, de
forma que la interfaz del operador es sencilla, intuitiva, y flexible, y habiéndose desarrollado los gráficos
adecuados se infiere un comportamiento adecuado durante la operación del sistema (Runtime).
Figura 3.10 Interfaz gráfica HMI típica diseñada en CITECT.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 3
40
– COMPONENTES DEL SISTEMA DE CONTROL .
3.1.4.3
Operaciones.
3.1.4.3.1
Comandos.
Como se dijo anteriormente las operaciones principales que son realizadas a través de la interfaz de
operación son la exposición de los datos recolectados desde la planta y el envío de las señales correctivas
enviadas por el operador. Para este efecto CITECT incorpora comandos y controles a la interfaz HMI, los
cuales se pueden ver en la Figura 3.11.
“Comandos por Mouse”: Estos comandos pueden ser asignados a cualquier objeto gráfico dentro de los
displays HMI. Éstos son activados cuando el operador hace un clic sobre el objeto configurado, por ejemplo
una válvula.
Ø
“Deslizadores”: Comandos deslizantes. Todos los objetos gráficos pueden ser configurados como
deslizantes. Éstos permiten al operador cambiar el valor de una variable análoga cambiando la
posición del objeto. Por ejemplo el valor de un set-point puede aumentar o disminuir cambiando la
posición de un objeto, típicamente subir o bajar este.
Ø
“Comandos por Teclado”: CITECT cuenta con 3 tipos de estos comandos.
Comandos Globales, que se pueden ejecutar desde cualquier parte de la aplicación, comandos por
página, que sólo funcionan en la página configurada, y los comandos por objeto, que funcionan cuando
el objeto se ha seleccionado.
Ø
“Objetivos de Pantalla”: Los objetivos de pantalla son zonas activas en la pantalla de fondo donde el
operador puede hacer clic (como un pulsador). Estos pulsadores invisibles permiten más flexibilidad en
el diseño de la interfaz del operador.
Comandos
Deslizantes
Comandos
por Teclado
Comandos
por Ratón
Objetivos
de Pantalla
Figura 3.11 Ejemplo de aplicación de comandos dentro de CITECT.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 3
3.1.4.3.2
41
– COMPONENTES DEL SISTEMA DE CONTROL .
Gráficos de Tendencia.
Se puede registrar y obtener el Gráfico de Tendencia o Curva de Tendencia de cualquier variable de
producción. Una Curva de Tendencia elabora un diagrama de la variación en el tiempo de la variable (volumen
de producción, nivel, temperatura, etc.) o del comportamiento de un dispositivo o de un proceso. Las Curvas de
Tendencia de CITECT se generan a partir de una selección de valores de muestreo. Los valores de muestreo
se representan contra el tiempo y el gráfico resultante da una indicación del comportamiento del proceso. Las
muestras se pueden tomar periódicamente, o cuando ocurran determinados eventos en el sistema. El período
de muestreo puede ser tan bajo como 10 milisegundos, y tan alto como 24 horas. En la Figura 3.12 se aprecia
la interfaz para las curvas de Tendencia que incorpora CITECT en su sistema.
Figura 3.12 Pantalla de Curva de Tendencia construida en CITECT.
3.1.4.3.3
Alarmas.
En todo proceso suceden eventos inesperados que pueden ocasionar algún tipo de falla o mal
funcionamiento en el proceso, todos estos pueden ser monitoreados por CITECT. Las alarmas pueden ser
categorizadas y priorizadas configurando algún tipo de acción específica que el sistema deba realizar cuando
ocurran, por ejemplo accionar alguna bocina, detener alguna máquina, etc. La figura 3.13 muestra la pantalla
de Alarmas de CITECT, configurada con diferentes alarmas.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 3
42
– COMPONENTES DEL SISTEMA DE CONTROL .
Figura 3.13 Pantalla de Alarmas construida en CITECT.
3.1.4.3.4
Reportes.
Un informe o reporte es una exposición o descripción de las condiciones de la planta que se puede
ejecutar periódicamente;
a petición, o solamente cuando ocurra alguna circunstancia (como un cambio de
estado de un bit, cuando se inicia CITECT, o a una hora específica del día). En CITECT, los informes se
pueden generar en cualquier formato deseado, que puede incluir texto, datos históricos y actuales, resultados
de cálculos, etc. Estos se pueden desplegar en una pantalla, imprimir en un archivo o impresora, incluso
enviarlos por e-mail. La figura 3.14, muestra un reporte tipo.
Figura 3.14 Ejemplos de Reportes construidos en CITECT.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 3
43
– COMPONENTES DEL SISTEMA DE CONTROL .
3.2
Sistema de Control Distribuido DCS DeltaV.
3.2.1
Introducción.
El Sistema de Control Distribuido (DCS) del Tren 1, está basado en el Sistema de Control Distribuido
DeltaV de Emerson Process y una amplia variedad de PLCs, cuyo concepto de diseño incorpora la distribución
funcional y física del control de procesos de la planta, sobre la base de tecnología de electrónica digital de
última generación.
3.2.2
Jerarquía de Control.
Desde el punto de vista del control, la arquitectura y organización del DCS es jerarquizada y puede
dividirse en tres niveles, como se ve en la Figura 3.15.
-
Nivel 1. lnterfaz con el proceso y el sistema de control.
-
Nivel 2. Control Supervisor.
-
Nivel 3. Información y Control Gerencial.
ORGANIZACIÓN JERÁRQUICA DEL SISTEMA DE CONTROL DISTRIBUIDO
Equipos y/o sistemas :
Computadores CHIP
Sistema Data Historian
Sistema PI
SQC
Equipos y/o sistemas :
DCS DeltaV
PLC Triconex
PLC MODICON
Equipos y/o sistemas :
Unidades de Polisher
Unidades Desalinizadoras
Compresores de Aire
Planta de N2
Función es optimizar y
apoyar la gestión
INFORMACIÓN
Y
CONTROL
GERENCIAL
Nivel 3
CONTROL
SUPERVISOR
Nivel 2
INTERFACE CON EL
PROCESO Y CONTROL
Nivel 1
Variables de
Control
Variables de
Monitoreo
Variables de
lógicas de
PLC’s
Nivel 0
Gas Natural
Agua de Mar
Control
Local
Aire
Producto en
Especificación
PLANTA DE
METANOL
Aguasdede
Retorno
Aguas
Retorno
y Residuos
Figura 3.15. Organización del Sistema DCS.
3.2.2.1 Nivel 1: Interfase con el proceso de control.
El primer nivel proporciona la interfaz entre el sistema DCS - PLC, con las variables de proceso de la
planta, a través de sus respectivos sensores, transmisores, interruptores de campo, cableado hasta la sala de
control, válvulas y otros elementos de control final e instrumentación asociada. Además se provee el control
básico y especializado que mantiene en operación la planta, vale decir, si los dispositivos que están localizados
en los niveles superiores del DCS presentan falla, éste nivel mantiene el control regulador en forma
independiente de la planta de acuerdo a su configuración, parámetros y modos de operación.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 3
44
– COMPONENTES DEL SISTEMA DE CONTROL .
En la Figura 3.15 se aprecian los tres tipos de variables características en el sistema DCS de la planta:
Ø
Variables de control.
Son señales eléctricas que se miden, comparan con una referencia en una tarjeta de control digital y
que generan una señal de salida a algún elemento de control final (actuador, válvula, etc.) para obtener la
regulación deseada de acuerdo a algún tipo de control predeterminado.
En el DCS del Tren 1 existen varios tipos de controladores digitales encargados de regular las
variables de proceso claves para la operación de la planta. Dada la trascendencia de estos sistemas para la
operación de la planta, se cuenta con un respaldo que es redundante y que opera automáticamente sólo en
caso de falla del que se encuentra en estado activo.
La mayor parte de los lazos de control en los controladores digitales han sido configurados como PID.
Según el tipo de sistema que se está controlando se implementan estrategias de control pre-alimentadas, en
cascada, combinaciones de las anteriores y del tipo multivariable no-lineal.
Los lazos de control más relevantes para la operación de la planta en condición de emergencia, tienen
conectadas directamente a las tarjetas controladoras estaciones de operador, que están ubicadas en el panel
auxiliar de la sala de control. Por lo tanto, en caso de falla en los dispositivos de los niveles superiores es
posible actuar sobre los controladores para mantener la planta operativa.
Ø
Variables de monitoreo.
Son señales análogas (presión, temperatura, nivel, flujo, etc.) o discretas (on, off que permiten
observar el estado de operación de un equipo y están conectadas a tarjetas multiplexoras del antiguo sistema
de control.
El DCS, tiene instaladas tarjetas multiplexoras del tipo de entrada análoga y discreta, Las del tipo
analógico monitorean las variables presión, temperatura, flujo en las áreas de desulfurizacíón, reformador,
compresión, lazo de síntesis, torres de destilación, área de servicios, niveles de estanques, señales de
analizadores de composición en línea, etc.
Las del tipo discreto monitorean estados de operación de bombas, condiciones de conmutación como
ser: presión, temperatura, nivel, posición, indicando un estado normal o de alarma.
Ø
Variables de lógica de PLC.
Pueden ser de tipo análogo o discreto asociadas a un sistema de alarmas en panel, enclavamiento,
sistemas de partida y parada segura de equipos. Deben estar conectadas a módulos de E/S de los PLC en la
planta.
El DCS dispone de varios módulos de E/S correspondientes a diferentes tipos de PLC. A través de
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 3
45
– COMPONENTES DEL SISTEMA DE CONTROL .
estos módulos, los controladores programables pueden obtener la información necesaria y enviar las acciones
de control al proceso.
Los PLC del tren 1, están conectados al DCS DeltaV mediante una interfaz denominada PCIU
(Programable Controller lnterfaz Unit). Este enlace consiste en un par de cables trenzados apantallados, su
comunicación es del tipo serial a una velocidad de 9600 Baudios y usa como método de comunicaciones el
protocolo MODBUS.
En el DCS existe otra interfaz mediante la cual es posible conectar cualquier controlador programable
o dispositivo inteligente que cuente con una puerta de comunicaciones serial del tipo RS-232 ó RS-485 al
Sistema de Control Distribuido. La interfaz se denomina IDI (lnterface para Dispositivos Inteligentes) y es usada
como enlace entre los PLCs y el DCS. Las ventajas de la IDI sobre la PCIU son varias, pero fundamentalmente
la IDI puede comunicar hasta 1152 puntos provenientes de PLC al controlador, el cual los recibe como si se
tratara de datos provenientes desde cualquier tarjeta multiplexora. De esta manera, los datos transmitidos por
los controladores programables están disponibles para cualquier dispositivo en el DCS y pueden ser
monitoreados o controlados.
3.2.3
DCS DeltaV.
El DCS DeltaV está compuesto principalmente de dos partes, Hardware y las herramientas de ingeniería
(Software).
3.2.3.1 Hardware.
El hardware del sistema está compuesto por los siguientes elementos:
Ø
Estaciones de Trabajo
Ø
Red de control (opcionalmente redundante), para la comunicación entre los nodos del sistema.
Ø
Fuentes de poder.
Ø
Controladores DeltaV (opcionalmente redundante), realizan el control local y la administración de los
datos y las comunicaciones entre los dispositivos de E/S (entrada-salida) (tarjetas de interfases
análogas, discretas, etc.) y la red de control.
Ø
Dispositivos de E/S por controlador, que procesan la información proveniente desde los dispositivos del
campo.
Ø
Llaves de licencia. Dispositivo que se conecta en el puerto paralelo del servidor del sistema y que tiene
configuradas las distintas licencias para el DCS, por ejemplo; entradas análogas o discretas se pueden
configurar el sistema, cantidad de estaciones de trabajo, etc.
Las Figuras 3.16 y 3.17 muestran ejemplos de configuración del hardware DeltaV.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 3
46
– COMPONENTES DEL SISTEMA DE CONTROL .
Workstation
10BaseT Cable
Maximum Length 100m (330ft)
Controller
Primary Hub
Secondary Hub
10BaseT Cable
Maximum Length 100m (330ft)
Figura 3.16 Configuración Elemental de un DCS DeltaV con red de control redundante.
Figura 3.17 Diferentes dispositivos de campo conectados a un DCS DeltaV.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 3
Ø
47
– COMPONENTES DEL SISTEMA DE CONTROL .
Terminología.
El control en DeltaV está basado en Módulos. Un módulo es la unidad lógica de control más pequeña
en el sistema. Generalmente un módulo contiene una única entidad de control asociada, por ejemplo, al control
de un loop o un motor y se asocia a un único dispositivo de campo.
Un módulo contiene algoritmos, condiciones, alarmas, display’s, información histórica y otras
características que define el equipo de proceso.
Los Algoritmos son un conjunto de pasos lógicos que definen la secuencia de control que ejecuta el
módulo.
Los Bloques de Función (Function Blocks), son bloques construidos en DeltaV para crear los
algoritmos que realizan el control y monitoreo del proceso. La librería DeltaV contiene plantillas de Bloques de
Función para crear los diferentes algoritmos y éstas tienen una serie de parámetros configurables para
optimizar los nuevos algoritmos. Los bloques de Función pueden ser combinados para crear algoritmos de
control complejos.
Adicionalmente a los Bloques de Función, DeltaV incorpora además el Esquema de Funciones
Secuenciales (Sequential Function Chart, SFC), el cual puede ser utilizado para la creación de algoritmos
secuenciales, que se utilizan en procesos donde el tiempo de proceso varíe en forma secuencial.
Parámetros, son los datos ajustados por el usuario dentro de los algoritmos, que definen sus cálculos
y lógicas. Éstos pueden ser descritos por el tipo de información que ellos entregan, tales como parámetros de
entradas, salidas, etc.
El DCS DeltaV incluye una librería de módulos prefabricados con características básicas. El usuario
puede utilizar éstos módulos y optimizarlos o crear módulos nuevos de acuerdo a las necesidades del proceso.
Los módulos que trabajan juntos realizando el control y monitoreo de una parte específica del proceso,
son agrupados dentro de un Área. Un Área es una división lógica del sistema de control y típicamente
representan una ubicación dentro de la planta, por ejemplo el Área de generación eléctrica. El ingeniero a
cargo de la configuración determina como dividir el sistema en diferente Áreas.
Nodos, son las partes físicas o equipamiento dentro del sistema de control, tal como un controlador o
una unidad de ingeniería. El control del proceso parte por descargar las diferentes configuraciones realizadas
en los módulos dentro de los controladores. Éstas definen como se comporta el controlador y que información
recibe, envía o almacena desde el proceso (dispositivos de campo).
Devices Tags (identificador de dispositivo), representan los instrumentos, válvulas u otros dispositivos
de campo. Un Device Signal Tags (identificador de la señal de un dispositivo) consiste en un Device Tags y
una señal del campo específica relacionada con éste.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 3
48
– COMPONENTES DEL SISTEMA DE CONTROL .
Alarmas, éstas se asignan en cada módulo y alertan al operador que un evento ha ocurrido.
Típicamente cuando alguna de ellas se activa se quiere que el operador realice alguna acción, por esa razón
se configuran audibles y visibles en pantalla.
La Base de Datos, contiene toda la información de configuración
relacionada con el proceso y
permite realizar cambios dentro de ella (fuera de línea), sin afectar el control del proceso. También se pueden
realizar cambios a la base de datos en línea.
La Figura 3.18 ejemplifica la estructura jerárquica del DCS DeltaV.
Figura 3.18 Diagrama básico de la estructura jerárquica del DCS DeltaV.
Ø
Software.
DeltaV incorpora una serie de herramientas que ayudan al ingeniero a configurar, operar, documentar,
y optimizar el proceso. Las herramientas básicas son llamadas herramientas de Ingeniería y de Operación.
Adicionalmente cuenta con herramientas para aplicaciones de Control Avanzado, Instalación y Ayuda en Línea.
DeltaV está desarrollado bajo un ambiente Windows lo que permite acceder a sus distintas
aplicaciones a través de Menús de Aplicación. La figura 3.19 Muestra un ejemplo de acceso a las distintas
aplicaciones.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 3
49
– COMPONENTES DEL SISTEMA DE CONTROL .
Figura 3.19 Acceso a distintas aplicaciones dentro de DeltaV a través de Menús de Aplicación.
3.2.3.2 Herramientas de Ingeniería.
Las principales herramientas de ingeniería son: Configurations Assistant, DeltaV Explorer, Control
Studio, DeltaV Operate y si se cuenta con licencia apropiada Batch Applications, Recipe Studio. Otras incluídas
son: User Manager, Database Administrator, FlexLock, y Systems Preference. A continuación se describen las
más usadas.
Ø
Configurations Assistant.
Herramienta de configuración del sistema, se usa generalmente sólo al principio, cuando el usuario no
está muy familiarizado con el sistema, posteriormente se usa DeltaV Explorer, que es la herramienta usada con
regularidad cuando el sistema está en funcionamiento.
Ø
DeltaV Explorer.
Es similar en apariencia a Windows Explorer, es la herramienta que permite definir los componentes
del sistema, tales como Áreas, Módulos, y Alarmas. Además entrega una visión general del sistema y su
configuración. La Figura 3.20 muestra una vista de ésta herramienta.
Con DeltaV Explorer se pueden hacer muchas cosas, tales como:
-
Crear, copiar o mover módulos.
-
Configurar el hardware del sistema.
-
Definir tipos y prioridades de alarmas.
-
Correr otras aplicaciones, como Control Studio por ejemplo.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 3
50
– COMPONENTES DEL SISTEMA DE CONTROL .
Figura 3.20 DeltaV Explorer.
Ø
Control Studio.
Se usa para diseñar y modificar los módulos y plantillas individuales que llevan a cabo las estrategias
de control. Con esta aplicación se puede, gráficamente, construir un módulo de control arrastrando los
diferentes items de confuguración desde la ‘paleta’ (palette) adecuada hasta el diagrama. Para crear un
algoritmo de control simplemente se conectan los diferentes items dentro del diagrama del módulo.
Control Studio, soporta un rango amplio de conceptos industriales incluyendo Functions Blocks (para
control continuo) y SFC (para control secuencial). Se pueden mezclar items de ambos conceptos dentro del
diagrama del módulo para crear el algoritmo de control. En la Figura 3.21 se ve una vista de Control Studio y
las diferentes partes que lo componen.
Figura 3.21 Ejemplo de una aplicación con Control Studio.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 3
Ø
51
– COMPONENTES DEL SISTEMA DE CONTROL .
Database Administrator.
Esta herramienta le permite a un usuario, con los suficientes privilegios, realizar tareas de mantención
en la base de datos del sistema tales como: copiar, borrar, crear nuevos dispositivos, realizar respaldos, etc.
Ø
FlexLock.
Permite crear escritorios (Desktops) duales en una única estación de trabajo (Windows y DeltaV
Desktops), es decir, se puede trabajar en un ambiente Windows y DeltaV en una misma unidad. El acceso a los
diferentes ambientes está determinado por los privilegios de cada usuario.
Ø
User Manager.
Permite especificar los niveles de accesos para grupos de trabajos o usuarios individuales. Se pueden
definir diferentes tipos roles: Administrador, operador, ingeniero, etc. Y los tipos de privilegios que ellos tendrán
dentro del sistema.
Para crear o modificar módulos, un usuario debe tener configurado el privilegio correspondiente.
Similarmente para descargar cambios a la configuración, se necesita el privilegio adecuado.
Ø
DeltaV Operate.
Esta aplicación funciona en dos modos: Configuración y Operación. En el modo de configuración, se
construyen las interfases gráficas con el proceso a través de las cuales se realiza el monitoreo de la planta. En
el modo de operación, el operador realiza las tareas diarias de mantención y monitoreo del proceso a través de
las interfases gráficas construidas.
En el modo de configuración, se pueden incorporar imágenes, textos, gráficos, animaciones y sonidos
a las interfases que se construyen. DeltaV tiene incorporada una extensa librería con todos éstos objetos,
además de la capacidad de construir nuevos.
En el modo de operación, el operador interactúa con el proceso a través de la aplicación DeltaV
Operate, La alta resolución de las interfases gráficas entregan al operador una información detallada. Las
alarmas se presentan en un banner bajo la interfaz de operación haciendo que el operador ponga su atención
en las alarmas más importantes. La Figura 3.22 muestra una interfaz gráfica creada con DeltaV Operate.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 3
52
– COMPONENTES DEL SISTEMA DE CONTROL .
Figura 3.22 Interfaz gráfica de operador creada con DeltaV Operate.
Ø
Diagnostics.
Provee de información sobre el estado e integridad de los componentes del sistema. Se accede a ésta
herramienta en cualquier momento, en particular después que se ha hecho una modificación, como agregar
algún dispositivo nuevo, cambios en la configuración de algún módulo, etc.
Ø
Process History View.
Esta aplicación despliega en tiempo real datos del proceso, las variables continuas del proceso
configuradas en los diferentes módulos son graficadas en forma de línea sobre el display de ésta aplicación y
los eventos discretos como los sincronizados, son representados en forma tabular en la interfaz. La Figura 3.23
muestra la interfaz gráfica.
Process History View, se usa para verificar el desempeño del proceso en cualquier instante.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 3
53
– COMPONENTES DEL SISTEMA DE CONTROL .
Figura 3.23 Interfaz gráfica de Process History View.
3.3
PLC Modicon 385-E.
3.3.1
Introducción.
En esta sección se describirán los componentes y módulos electrónicos del PLC “MODICON 385-E”
que se utiliza para el control y monitoreo de las plantas desalinizadoras y purificadoras de agua del complejo.
En todas las plantas se utiliza el mismo modelo de PLC, el cual es suministrado por el proveedor de los
equipos. Aquí se dará énfasis en la descripción de la CPU del PLC, sus características técnicas, y formas de
comunicación.
3.3.2
Unidades fundamentales de un PLC.
En la industria actual, el control de procesos y maquinarias es llevado a cabo por modernos
dispositivos electrónicos. Una industria automatizada puede proporcionar una mayor confiabilidad, productos
de mayor calidad, costos reducidos, eficiencia, y flexibilidad. Uno de los componentes fundamentales en la
implementación de la automatización en una industria es el controlador de lógica programable (PLC). Este
dispositivo fue introducido por primera vez en 1970 y es continuamente actualizado sobre la base de los más
modernos componentes electrónicos. Hoy en día, los PLC están diseñados con tecnología de última
generación en microprocesadores y circuitos electrónicos. Su capacidad de comunicación, brinda una gran
flexibilidad tanto al control como al monitoreo de procesos productivos. Debido a la gran capacidad de
comunicación, los PLCs utilizados en una planta industrial pueden estar conectados en red e intercambiar
información y datos. En la Figura 3.24 se muestra un diagrama en bloques generalizado de un controlador de
lógica programable.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 3
54
– COMPONENTES DEL SISTEMA DE CONTROL .
Unidad Central de
Proceso CPU
Controlador
Lógico
Programable
Dispositivo de
Programación
Entrada
Entrada Salida
Instrumentos
de Campo
Figura 3.24 Esquema elemental de un PLC.
Ø
Unidad Central de Procesamiento, CPU.
La CPU es el cerebro detrás de todas las decisiones lógicas tomadas. Lee el estado de señales de
entrada al PLC, toma decisiones basadas en el programa residente en memoria, y envía las acciones de
control a los elementos finales del sistema de control.
Ø
Memorias.
Existen varios tipos de memoria usados en los PLC para almacenar la lógica y los datos, CMOS y
PROM son las mas comúnmente usadas en los controladores. Las memorias CMOS o CMOS RAM
(Semiconductor Complementario de Oxido de Metal), son Memorias de Acceso Aleatorio que proveen un
acceso rápido, de bajo costo, y bajo consumo de energía, que pueden ser leídas y escritas fácilmente.
Desgraciadamente, esta es volátil, y pierde su contenido si falta la energía. Para evitar tener que recargar el
programa cada vez que la energía se pierde (y perder el contenido de los registros y estados lógicos), la
memoria CMOS es usualmente provista de una batería de respaldo. Dado el bajo consumo de energía de la
tecnología CMOS, una sola batería de litio puede mantener el contenido de la memoria sin aplicación de
energía por hasta 8 años.
La otra memoria es la PROM (memoria programable de solo lectura). Esta memoria es de rápido
acceso, bajo costo relativo, y no necesita energía para mantener su contenido. Una desventaja de la PROM es
que su contenido no puede ser fácilmente modificado. Esta puede ser leída repetidamente, pero para escribirla
se requiere de un dispositivo programador especial. Para programar la PROM, su contenido debe ser
totalmente eliminado exponiéndola a una intensa luz ultravioleta, y luego puesta en un programador especial.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 3
Ø
55
– COMPONENTES DEL SISTEMA DE CONTROL .
Elementos de E/S.
Un elemento importante en un PLC son las unidades de Entrada / Salida (E/S). La sección de E/S,
protege a la CPU del ruido eléctrico permitiendo el ingreso de sus señales a través de módulos especialmente
diseñados para esto. Esta sección es donde las señales son filtradas para remover el ruido, los niveles de
tensión son validados, y las decisiones tomadas por la CPU son puestas en operación.
El ruido eléctrico como el producido por las alzas de voltaje en las líneas de tensión, tensiones
inducidas por cargas tales como válvulas solenoides, o interferencia producida por el cableado a campo son
muy comunes en aplicaciones industriales. Ya que la CPU opera a bajos niveles de tensión (aproximadamente
5 volts), este ruido podría tener un serio impacto sobre su operación si llegase a su circuitería interna.
Ø
Dispositivos de Programación.
El Dispositivo de programación se utiliza para ingresar la lógica de control que caracteriza a cada PLC.
A través de esta unidad es posible editar, agregar o modificar partes de la lógica de control como también
monitorear valores de contadores, registros o estados lógicos de contactos de entrada o salida.
Mediante este dispositivo el programa de control puede ser almacenado en disco o recuperado rápidamente en
caso de pérdida de memoria por falla de energía de la batería de respaldo.
Normalmente el dispositivo programador es un computador portátil que mantiene un software de
programación suministrado por el fabricante y conectado al PLC mediante un cable serial a la puerta de
comunicaciones de la CPU.
Antiguamente el dispositivo de programación era un equipo especialmente diseñado para este
propósito que se conectaba directamente a la CPU. Para programar el PLC era necesario utilizar un sistema de
mnemónicos y símbolos complicando considerablemente la programación, con el consiguiente riesgo de error y
costo de tiempo.
3.3.3
Equipamiento Físico del PLC MODICON 385-E.
En esta sección se describirán los elementos principales que componen el PLC MODICON 385-E, que
se encuentra instalado en las unidades desalinizadoras y purificadoras. Se dará importancia a la CPU pues es
el componente que permite comunicarse entre PLC’s, a través de una red MODBUS PLUS; y entre el PLC de
la unidad y el sistema SCADA que supervisará el funcionamiento de las mismas.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 3
Ø
56
– COMPONENTES DEL SISTEMA DE CONTROL .
Racks.
Los módulos del PLC se conectan mediante RACKS. Como se muestra en la Figura 3.25 y 3.27, cada
rack dispone de un slot especial para la conexión de una fuente de poder, localizado a la izquierda del rack, y
de espacio disponible para conectar 6 módulos para el modelo AS-H819-209 que es el instalado en las
unidades.
Cada rack distribuye la energía internamente a cada modulo conectado a él. Todos los racks son
similares, sólo se diferencian por los módulos insertados en él, ya que son éstos los que determinan su función,
dependiendo si la unidad es desalinizadora o purificadora.
Las figuras siguientes muestran un rack de conexión de módulos y uno con módulos de E/S ya
instalados.
Figura 3.25 Diferentes racks de montaje para el PLC de serie 800.
Figura 3.26 Diagrama básico de un rack de serie 800.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 3
57
– COMPONENTES DEL SISTEMA DE CONTROL .
Figura 3.27 Descripción general del montaje de una fuente de poder en un rack de serie 800.
Ø
CPU 984 385-E.
La CPU 385-E es una CPU de rango medio, con una arquitectura modular y expandible, ésta emplea
toda la serie 800 de E/S de MODICON, para su comunicación e interfaz. El modelo “E” soporta toda la serie de
instrucciones de todos los controladores 984 y se programa con el software MODSOFT de MODICON.
La CPU 385-E está construida junto la interfaz de comunicación en un único gabinete. Las Figuras 3.28
y 3.29 muestran una CPU 385-E.
La CPU 385-E posee una capacidad de memoria de usuario de hasta 16KB y 2KB de memoria de
estado, dos puertos de comunicación (uno MODBUS y otro MODBUS PLUS), tiene además una capacidad
total de 512 puntos discretos en I/O (para cualquier combinación), y un total de 2048 registros.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 3
– COMPONENTES DEL SISTEMA DE CONTROL .
58
Figura 3.28 CPU MODICON 385-E.
Figura 3.29. CPU 385-E.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 3
3.3.4
Ø
59
– COMPONENTES DEL SISTEMA DE CONTROL .
Principales características de la CPU 385-E.
Funcionamiento.
Cada CPU 385-E con módulos de E/S, los cuales están conectados directamente a los dispositivos del
campo, los cuales enlazan directamente las variables de proceso a la CPU. La CPU controla la aplicación
basándose en los datos recibidos a través de éstos. Los módulos de entrada aceptan señales eléctricas que
provienen de los distintos dispositivos de campo (transmisores, sensores, etc) y las convierten en señales
eléctricas aceptables para su procesamiento por la CPU. Los módulos de salida reciben señales eléctricas
desde la CPU y las convierten a niveles de voltaje o corriente aceptable para el accionamiento de los
dispositivos de campo (actuadores, switches, etc).
La CPU resuelve las lógicas de control muy rápidamente a intervalos regulares haciendo predecible el
control. La lógica determina que acciones tomar a partir de los datos recibidos y los resultados son expresados
en el cambio de estado de los dispositivos de salida instalados en el campo. La figura 3.30 muestra un
esquema de éste proceso.
Figura 3.30 Esquema funcional de una CPU 385-E.
Ø
Memoria del Sistema.
Toda la memoria de la CPU 385-E está basada en tecnología CMOS con batería de Litio para
respaldar la integridad en caso de falla de energía. Además CPU cuenta con un switch de protección de
escritura.
La CPU 385-E tiene dos tipos de memoria a saber, Executive Firmware y User Logic. La primera es
una memoria del tipo no volátil (ROM) y la segunda es de tipo volátil (RAM) respaldada por baterías. En ésta se
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 3
60
– COMPONENTES DEL SISTEMA DE CONTROL .
guarda el programa de aplicación, los datos de configuración y los estados del sistema, que se actualizan cada
vez que la CPU realiza un scan para resolver la lógica de la aplicación.
Ø
Software.
Todas las CPU 385 son programadas en lógica de escaleras. MODICON adicionalmente incorpora
bloques de función, en los cuales ya están programadas lógicas de uso estándar como por ejemplo el algoritmo
de una función PID.
Ø
Entradas / Salidas (I/O).
La aplicación almacenada y resuelta por la CPU es implementada en el proceso por los módulos I/O.
Éstos están cableados directamente a los dispositivos de salida en la planta y conectados a la CPU por medio
del bus de comunicación del rack.
El subsistema I/O puede ser local (ubicado en el mismo rack que la CPU) o remoto, (ubicado hasta
4.5 Km desde la CPU, dependiendo del tipo de cable). Los I/O locales se comunican con la CPU a través de
cables o el blackplane (bus) del rack. Los I/O remotos se comunican con la CPU a través de interfases remotas
de comunicación instaladas en cada I/O remoto.
Ø
Comunicaciones.
Los dispositivos periféricos, como paneles programadores o computadores con aplicaciones de
configuración y monitoreo, pueden ser conectados directamente a la CPU a través del puerto MODBUS
incorporado en ésta. MODBUS es un protocolo de comunicación basado en el estándar RS-232 y usado para
la adquisición de datos, edición de programas y almacenamiento.
La CPU 385-E incluye además un puerto MODBUS PLUS, que es un protocolo de comunicación token
bus punto a punto, con una velocidad de comunicación de hasta un megabit por segundo. MODBUS PLUS
soporta aplicaciones de datos y operaciones de programación. En la Figura 3.28 se aprecia la ubicación de
ambos puertos en la CPU.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 4 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA II Y III.
4.1
61
Configuración de las bases de datos en CITECT, de las unidades Desal y Polisher.
Los trabajos que se proponen realizar en Planta II y III son, cambiar las actuales interfases HMI PANEL
MATE de MODICON de los equipos Desalinizadores y el PC MITAC que alojaba al sistema SCADA IC2000 del
Polisher, por paneles industriales SIEMENS IL70 Panel PC de 15” (pantalla táctil), en los cuales se instala el
nuevo sistema CITECT por medio del cual se operarán los equipos. En el anexo se pueden ver las
características principales de los nuevos paneles.
Estos nuevos equipos se conectarán a los PLC por medio de la interfaz de comunicación serial del
PLC y del Panel PC, además de las modificaciones eléctricas, estructurales y de comunicación necesarias de
realizar para lograr el correcto funcionamiento de las nuevas modificaciones.
En planta III, las modificaciones que se deben realizar, en el Polisher y Desales, son las mismas
descritas anteriormente, salvo que los equipos a reemplazar son PC’S XYCOM, con el sistema SCADA IC2000.
Para obtener la base de datos que se utilizará en el nuevo sistema SCADA CITECT, primero se rescata
la base de datos desde el programa de cada PLC de la unidad correspondiente y después se debe hacer
corresponder las variables programadas en el antiguo sistema con las que corresponden a cada PLC de cada
unidad, esto es con el fin de programar el nuevo sistema con las mismas variables que están en
funcionamiento.
El objetivo de ingresar la base de datos directamente desde el PLC de cada unidad es:
a) Uniformar cada dispositivo de terreno a un solo TAG, tanto en el PLC como en el sistema de control,
facilitando la ubicación de un dispositivo determinado en caso de ser necesario, así en los planos
P&ID, el PLC y el SCADA aparecerán de la misma forma.
b) Facilitar a futuro la introducción de nuevas variables en el sistema de control local, puesto que la base
de datos correspondiente ya estará ingresada.
Para obtener las bases datos desde los distintos programas de cada PLC, se realizó como a
continuación se indica y, como para todas las unidades fue de la misma forma, sólo se ejemplifica con la base
de datos de la Desal A de Planta III.
Ø
Se debe cargar el programa correspondiente, que para este caso de ejemplo es “Desal3_a”, desde
MODSOFT (software de configuración y desarrollo de los PLC MODICON), el cual debe quedar como muestra
la Figura 4.1.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 4 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA II Y III.
62
Figura 4.1. Muestra como acceder a la lista de TAG’s, registros y comentarios del programa.
Ø
A continuación se debe exportar la base de datos como un archivo de texto, siguiendo los
pasos de las Figuras 4.2 y 4.3.
Figura 4.2. Menú para exportar la base de datos desde Modsoft.
Figura 4.3. Asignando un nombre a la base de datos a exportar.
Obs: Se debe tener cuidado de colocar la extensión al nombre del archivo a exportar desde
MODSOFT.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 4 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA II Y III.
63
El archivo exportado por defecto quedará en el directorio de MODSOFT en la unidad “C” (o donde esté
instalado el programa), y desde allí se abre con “MSExcel”. La Figura 4.4 muestra la ubicación del archivo y la
Figura 4.5 la base de datos exportada una vez abierta en MSExcel.
Figura 4.4. Ubicación del archivo exportado desde MODSOFT.
Figura 4.5. Base de datos exportada, abierta con MSExcel.
Ø
El archivo abierto en MSExcel, se debe guardar con un nombre adecuado y en formato “.xls”.
Una vez, que se ha obtenido la base de datos de la unidad correspondiente, se debe cargar en el nuevo
sistema CITECT, para lo cual se deben realizar los siguientes pasos:
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 4 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA II Y III.
64
1) Se debe crear en CITECT un nuevo proyecto, cuyo nombre es conveniente que tenga relación directa
con el nombre del equipo para poder identificarlo fácilmente. Como el ejemplo que se presenta aquí es el de la
Desalinizadora ‘a’ de Planta III, entonces el proyecto en CITECT se llamará “Desal3a”. La Figura 4.6 muestra
como debe hacerse y en la Figura 4.7 se ve como queda en CITECT el nuevo proyecto.
Figura 4.6 Creación de un nuevo proyecto en Citect.
Figura 4.7. Aspecto del nuevo proyecto.
2) Seguidamente, se debe crear el I/O Device asociado al nuevo proyecto en CITECT, el detalle de este
procedimiento lo muestran las Figuras 4.8, 4.9, 4.10 y 4.11.
Figura 4.8 Creación del IODevice en Citect.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Figura 4.9 Nombrando el nuevo IODevice.
Angel Oyarzo / 2005
CAPÍTULO 4 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA II Y III.
Figura 4.10 Asignando la dirección del PLC.
65
Figura 4.11 Asignando el puerto de comunicación.
En las figuras anteriores sólo se muestran aquellos diálogos modificables para cada caso.
En la Figura 4.8 se ve donde se debe comenzar a crear el nuevo I/O Device del proyecto, se hace
doble click en “Express I/O Device Setup”, donde aparecerá el cuadro que allí se aprecia. Sólo se debe seguir
las instrucciones que aparezcan en pantalla, con excepción de las mostradas en las Figuras 4.9, 4.10, y 4.11.
En la Figura 4.9 se da un nombre al I/O Device, por conveniencia debe ser uno con relación al
proyecto. La Figura 4.10 muestra donde se debe asignar la dirección del PLC al cual se quiere acceder y la
Figura 4.11 muestra donde se configura la puerta de comunicación serial, por la cual se comunicará CITECT
con los PLC’s.
3) Seguidamente se modifica la base de datos del nuevo proyecto creado. Primero se debe abrir en
MSExcel el archivo “variable.dbf”, ubicado en el directorio citect/user/nombre_del_proyecto (que para el
ejemplo es desal3a), al mismo tiempo se debe abrir en Excel el archivo que contiene la base de datos del PLC
(que para este ejemplo se ha llamado “Dbdesal3a.xls”). A continuación se copian las columnas
correspondientes a los TAG’s del PLC en la columna Name, del archivo “variable”, lo mismo debe hacerse con
la columna correspondiente a las direcciones de los registros del PLC, se debe copiar en “ADDR”, y las
descripciones de los TAG’s del PLC se copian en “Comment”, respectivamente. El archivo “variable”, debe
quedar como muestra la Figura 4.12. En el anexo F se encuentra un diagrama de flujo con el detalle de
configuración aquí presentado.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 4 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA II Y III.
66
Figura 4.12 Aspecto de la base de datos configurada en CITECT, “variable.dbf”.
La columna TYPE se completa dependiendo del tipo de dato al cual se está haciendo referencia, si es
un dato discreto se completa con DIGITAL y si es un dato análogo se completa con INT. En la columna UNIT
se debe colocar el nombre del I/O Device correspondiente al proyecto. Los TAG’s faltantes se completaron de
acuerdo a la lógica del dispositivo asociado.
NOTAS IMPORTANTES:
i)
No se debe modificar el tamaño de las columnas del archivo original, de lo contrario el cambio
en la base de datos no será reconocido por CITECT.
ii)
Antes de copiar los datos al archivo “variable” del nuevo proyecto en CITECT, se debe crear el
espacio suficiente, lo anterior se logra ingresando tantos registros en blanco como variables se quieran
introducir en “Variable Tags”, dentro del Proyect Editor de CITECT, de lo contrario CITECT no
reconocerá las nuevas variables.
iii)
Si CITECT no reconoce los cambios realizados dentro de la base de datos del nuevo proyecto, y
ejecutados los pasos anteriores; se debe ejecutar el comando “Pack”, dentro del Proyect Editor, el cual
validará la base de datos modificada.
Finalmente se deben guardar los cambios en el archivo ‘varable.dbf’, con formato dbf y no xls, de lo
contrario los cambios no serán reconocidos.
4.2
Diseño de las nuevas interfases gráficas en el sistema SCADA CITECT.
El diseño de las nuevas interfases gráficas de operador del nuevo sistema de control supervisor local,
están basadas en las que tienen los operadores en sala de control, por lo cual aquí se aplican las mismas
indicaciones, filosofía de funcionamiento, etc. Asimismo, se consideró la configuración de las unidades que
estaban en servicio.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 4 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA II Y III.
67
Las interfases gráficas de operador para las Desalinizadoras son genéricas, es decir, se crearon un
conjunto patrón de ellas y de acuerdo a la particularidad de cada equipo se fueron modificando a medida que
se iban implementando en cada unidad. Lo mismo ocurrió para los Polishers.
Las figuras precedentes muestran el conjunto genérico de interfases gráficas para cada equipo antes
mencionado, dejando establecido que al momento de cargar los proyectos, se debieron hacer las
modificaciones respectivas, como por ejemplo, si alguna válvula o instrumento no existe o está fuera de
servicio en forma permanente.
Allí aparecerán tag’s e indicaciones propias de algún equipo en particular, pero esto es sólo para
mostrar las interfases, pues para cada equipo se deben hacer las modificaciones pertinentes.
Ø
Interfases para las Unidades Desalinizadoras.
Figura 4.13. Interfaz principal de operador.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 4 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA II Y III.
68
Figura 4.14. Interfaz de tendencias.
Figura 4.15. Interfaz de controladores de válvulas.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 4 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA II Y III.
Figura 4.16. Faceplate de controladores.
69
Figura 4.17. Control de válvulas manuales,
con indicador de estado.
Figura 4.18. Interfaz de alarmas y resumen.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 4 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA II Y III.
70
Figura 4.19. Faceplate para válvulas manuales.
Figura 4.20. Interfaz de sintonía y ajuste de alarmas de los controladores.
Figura 4.21. Interfaz para ajuste de alarmas de instrumentos.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 4 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA II Y III.
Ø
71
Interfases de las Unidades Purificadoras.
Figura 4.22. Interfaz principal de operador de los Polisher “Overview”.
Figura 4.23. Interfaz para cada Polisher.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 4 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA II Y III.
72
Figura 4.24. Sistema de Regeneración.
Figura 4.25. Set Point de Alarmas.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 4 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA II Y III.
73
Figura 4.26. Ajustes de tiempos de regeneración.
Figura 4.27. Ajuste de Alarmas y controladores.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 4 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA II Y III.
Figura 4.28. Control de los Ventiladores.
Figura 4.29. Control de bombas.
Figura 4.30. Control de la secuencia de regeneración.
Figura 4.31. Control individual de un estanque de
Polisher.
Figura 4.32. Faceplate para las válvulas de control.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
74
Figura 4.33. Control de Acceso
a pantallas.
Angel Oyarzo / 2005
CAPÍTULO 4 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA II Y III.
4.3
75
DESCRIPCIÓN DE LAS INTERFASES GRÁFICAS.
Ø
Desalinizadoras.
En las figuras anteriores se presentaron las nuevas interfases gráficas para las unidades
desalinizadoras y purificadoras. Las anteriores, como se dijo anteriormente, serán comunes para todos los
equipos sin importar a que Planta pertenezcan, sólo se diferenciarán en los dispositivos con que cada una
cuente.
Para la interfaz principal de las unidades desalinizadoras, se utilizó como modelo principal, las que
actualmente tienen los operadores en sala de control. Las variables a desplegar en éstas se determinarán a
partir de las que actualmente se muestran en los distintos equipos por los sistemas de control locales. Éstas
variables se obtienen directamente desde el IC2000 o PANELMATE, que son los sistemas que actualmente
están en servicio.
Se han agregado algunas otras características como por ejemplo, la incorporación de una pantalla en
la que se muestran todos los controladores a la vez, con pequeños gráficos de tendencia incluidos, para
facilitar el procedimiento de partida (Figura 4.15). Los faceplate de los controladores son similares con los que
cuenta DeltaV junto con la mayoría de sus características, esto se hizo con la finalidad de facilitar su
manipulación (Figura 4.16).
Para el control de las válvulas manuales se ha incorporado faceplates manuales (Figura 4.19), y un
control con indicador de estado (Figura 4.17) para las discretas.
Para el caso de las válvulas proporcionales, el control se realiza a través de los faceplate de control,
Figura 4.16.
También se cuenta con interfases que permiten el ajuste de parámetros en controladores, como
alarmas, permitiendo un manejo fácil para el operador (Figuras 4.18, 4.20, 4.21).
Ø
Polishers.
Al igual que para el caso de las unidades desalinizadoras, aquí las interfases gráficas también están
basadas en las que tienen los operadores en la unidad local y en sala de control, también son genéricas para
todos los equipos.
Para el caso de Planta I, en la cual no existe un control supervisor tipo SCADA para el Polisher, se
utilizaron las mismas interfases, pues el funcionamiento de éste es similar al resto de ellos y, sólo hay
pequeñas variaciones en caso de que algún dispositivo no se encuentre instalado.
Las interfases para las plantas purificadoras constan de: una vista general de los tres Polishers con que
cuenta cada planta actualmente llamada “OVERVIEW” (Figura 4.22), tres interfases que muestran cada
Polisher por separado (Figura 4.23), una interfaz que muestra el sistema de regeneración (Figura 4.24),
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 4 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA II Y III.
76
displays que permiten ver y ajustar los valores de las alarmas y tiempos de regeneración (Figuras
4.25,4.26,4.27), controles para los distintos dispositivos que componen el Polisher, por ejemplo bombas
(Figuras 4.28,4.29,4.30,4.31), faceplate para las válvulas proporcionales (Figura 4.32) y un display de acceso a
las pantallas de configuración (Figura 4.33).
4.4
Configuración del Hardware y Comunicaciones, en CITECT.
Como todas las comunicaciones entre el sistema SCADA CITECT y los PLC que controlan los equipos
se proponen hacer a través de la interfaz serial RS-232. Se presenta a continuación el procedimiento usado
para la configuración de la comunicación entre el sistema SCADA CITECT y un PLC, se asume que es la
misma para todas las interfases.
El primer paso es la configuración del nuevo I/O DEVICE, cuyo procedimiento se mostró al comienzo,
aquí es donde se declara el dispositivo externo al cual se quiere comunicar.
Posteriormente, para la configuración de la comunicación, se debe ir al ‘PROYECT EDITOR’ de
CITECT y en el menú comunicaciones se deben configurar los parámetros que se detallan en la Figura 4.34.
Figura 4.34. Configuración de la comunicación en CITECT.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 4 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA II Y III.
77
En la figura anterior se ven cuatro cuadro de diálogos, los cuales se desprenden del menú
‘COMMUNICATION’.
El primero corresponde al cuadro del ‘I/O SERVER’ (Servidor de Entrada / Salida), en el cual se debe
verificar que se encuentre el nombre del I/O Server que se ha creado para el proyecto actual.
El segundo, corresponde a ‘PORTS’, en el cual se configuran los parámetros de la comunicación serial.
Aquí destacan tres casillas que son importantes describir:
Port Name: Es el nombre que CITECT asigna a la puerta de comunicación.
Port Number: Es el número de la puerta de comunicación.
Board Name: Es el nombre que CITECT le asigna a la tarjeta de comunicación.
Los nombres anteriores son los que se obtienen al trabajar con la puerta COM1 del PC. Es importante
tener esto en cuenta al momento de comunicarse por medio de otras tarjetas seriales adosadas al PC que aloja
a CITECT, para no cometer errores en la configuración del dispositivo de comunicación.
El tercero, es el que corresponde a ‘BOARDS’. Aquí se debe tener cuidado al asignar una tarjeta de
comunicación. En la casilla ‘BOARD NAME’ debe aparecer el mismo nombre que aparece para esta casilla en
el cuadro de diálogo ‘PORTS’, así se asegura que es la misma tarjeta que se está configurando.
El cuarto I/O DEVICES, se refiere al dispositivo externo al cual se quiere acceder. También debe ser
correspondiente el ‘PORT NAME’ con el que aparece en el cuadro de diálogo ‘PORTS’.
Una vez realizados los pasos anteriores, el proceso de configuración de la comunicación está listo.
Ø
Configuración de Variables y Alarmas en CITECT.
Como se recordará, para la creación del I/O DEVICE del proyecto, se modificó la base de datos
agregando las variables necesarias en el archivo ‘variable.dbf’ de CITECT, éste es el primer paso en la
configuración de las variables en CITECT.
Pero, para la configuración de las variables que utilizará CITECT, éstas se deben configurar signando
una etiqueta de configuración a cada una (tag’s), lo cual se realiza ingresando en P
‘ ROYECT EDITOR’ de
CITECT y modificando las propiedades de cada variable ingresada, tal como se ve en las Figuras 4.35 y 4.36.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 4 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA II Y III.
78
Figura 4.35. Configuración de un tag discreto.
Las figuras muestran la configuración de una variable discreta y análoga para CITECT. En ambos
casos en la casilla ‘varible tag name’ aparecerá el tag que tiene asignado el PLC a cada variable, y como para
CITECT es similar, entonces éste será el tag con que trabaje CITECT, en otras palabras; CITECT reconocerá
como propio también ese tag.
El resto de la configuración para cada variable se aprecia en las figuras. El escalamiento de las
variables se obtiene directamente desde el utilizado por IC2000 o PanelMate, según sea el caso.
Para la configuración de los tag’s que CITECT reconocerá como alarmas, se debe proceder en forma similar a
la anteriormente descrita, realizando las siguientes acciones.
Figura 4.36. Configuración de un tag análogo.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 4 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA II Y III.
79
Se debe crear el espacio suficiente en la base de datos de las alarmas para poder asignar las variables
deseadas, para ello en el ‘PROYECT EDITOR’ de CITECT, se despliega el cuadro de diálogo correspondiente
a las alarmas y se hace el espacio necesario en la base de datos, tantas casillas como variables se quieran
configurar.
En el archivo ‘digalm.dbf’ se deben copiar las variables que han sido seleccionadas para ser
reconocidas como variables en CITECT. Aquí sólo se modificarán las columnas correspondientes a ‘Tag’, Desc’
y ‘Var A’, para esta aplicación el resto de las columnas se dejará en blanco.
En la columna ‘Tag’ y ‘Var_A’ se deben copiar los tag asignados a las variables, que deben ser los
mismos asignados a CITECT, pues para ésta aplicación los tag de CITECT y del PLC serán los mismos.
En la columna ‘Desc’, se debe colocar la descripción de cada variable. El aspecto del archivo en
cuestión se ve en la Figura 4.37. Al igual que en el caso anterior, no se deben modificar el tamaño de las
columnas de la base de datos original.
Para la configuración de las variables como alarmas, es decir, que CITECT las reconozca como tales,
se debe completar el cuadro de diálogo de la Figura 4.38, al cual se accede mediante el fichero ‘Alarms’ del
PROYECT EDITOR de CITECT. Aquí en Alarm tag, se debe indicar el nombre que se le quiere dar a la alarma,
pero conviene que sea el tag de la variable de CITECT que se quiere configurar como alarma.
Figura 4.37. Archivo ‘digalm.dbf’, en Excel.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 4 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA II Y III.
80
‘Alarm Name’ es el nombre del dispositivo físico asociado a la alarma.
‘Var Tag A’ corresponde al tag que CITECT maneja para la variable a configurar.
‘Category’, como aquí es un sólo equipo, las categorías de las alarmas será una sola, si se deja en blanco
corresponde a la categoría por defecto: 0.
Figura 4.38. Cuadro de diálogo para la configuración de alarmas en CITECT.
Para dar formato a la presentación del cuadro de alarmas, en el fichero de alarmas se debe abrir el
cuadro correspondiente a ‘Alarm Categories’, Figura 4.39.
Figura 39. Cuadro para la configuración del formato de alarmas.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 4 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA II Y III.
81
En éste cuadro, los casilleros a ‘Display on Alarm Page’ y ‘Display on Summary Page’ deben indicar
‘True’. Como en la pantalla de alarmas y de resumen el formato será el mismo, éstos se completarán como
sigue:
Alarm Format:
{TAG,12}^t
{Date(),9}^t
{TIME,8}{DESC,30}^t {State,3}
Summary Format: {TAG,12}^t
{Date(),9}^t
{ONTIME,8}{DESC,30}^t
OBS: Como la versión CITECT en la cual se cargará en el nuevo sistema es más avanzada que la versión con
que se probó el proyecto, puede existir un problema con las categorías. Si fuera así simplemente se debe
asignar una categoría a todas las alarmas, por ejemplo 1.
4.5
Modificación de la red de Comunicación entre CITECT y los PLC’s.
La comunicación entre los PLC’s y los sistemas supervisores actuales se realiza a través de interfases
MBPLUS y RS232. Las principales modificaciones propuestas tienen relación con la comunicación entre el
nuevo control supervisor y los PLC. Para la implementación de éste proyecto, se uniformará todas las
comunicaciones a MODBUS RTU. Las Figuras 4.40 y 4.41, muestran la distribución de la red de comunicación
vigente para las Plantas II y III.
Figura 4.40. Red de comunicación MB+, Planta III.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 4 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA II Y III.
82
Figura 4.41. Red de comunicación MB+ Planta II.
En las figuras anteriores se aprecian recuadros rojos, los que señalan las zonas donde será modificada esta
red y los detalles de ellas se ven en los anexos, los que contienen las modificaciones realizadas.
Observación Importante:
Como la comunicación entre el control supervisor y los PLC se va a cambiar completamente a
MODBUS para todos los equipos, se pierde la posibilidad de controlar un equipo desde otro, en la eventualidad
que falle su control supervisor, como se podría efectuar a través de una red MODBUS PLUS. Sin embargo esta
posibilidad hoy día tampoco está implementada.
La Figura 4.42, muestra la configuración física del conector DB-9 a utilizar para conectar los equipos,
mientras la Figura 4.43 muestra el pin-out del cable a utilizar para la conexión MODBUS entre CITECT y los
PLC de las Desales y Polishers.
Figura 42. Aspecto exterior del conector DB-9 a utilizar para la conexión serial.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 4 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA II Y III.
83
Figura 43. Pin-out del terminal a utilizar para la comunicación.
El cable a utilizar para realizar la comunicación serial será del tipo ‘AWM 2919 VW-1’ de 3 pares marca BICC
BRAND-REX. ó equivalente, y los conectores serán DB-9 estándar con carcasa metálica, según
recomendación del fabricante.
4.6
Modificación del Sistema Eléctrico, para la instalación del proyecto.
Como las modificaciones que se implementan en el sistema eléctrico de los equipos correspondientes
a las Plantas II y III son similares, se muestran las modificaciones realizadas en la Desal A y Polisher de Planta
III, las modificaciones para el resto de los equipos de ambas plantas son las mismas. La Figura 4.44 muestra el
plano eléctrico correspondiente a la unidad Desal y la figura 4.45 muestra el correspondiente al Polisher. Los
planos finales con las modificaciones definitivas se encuentran en los anexos.
Figura 4.44. Diagrama eléctrico correspondiente a la Desal A y B de Planta III.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 4 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA II Y III.
84
Figura 4.45. Diagrama eléctrico correspondiente al Polisher de Planta III.
4.7
Modificaciones estructurales para el montaje del nuevo sistema.
Para implementar físicamente el nuevo sistema, se deben realizar modificaciones estructurales en los
diferentes gabinetes que contienen a los distintos PC’s que se encuentran en funcionamiento. En cada equipo,
de cada Planta donde se implementó el proyecto, se realizaron estas modificaciones.
Consisten básicamente, en la realización de un nuevo corte en el gabinete donde estaban alojadas las
antiguas interfases (PANEL MATE o XYCOM), para posteriormente montar los nuevos PC’s. Estos cortes se
deben hacer con herramientas de corte mecánico las cuales producen chispas y por lo tanto se hace necesario
proteger los equipos instalados para evitar que ocurran fallas producto de este trabajo ya que se realizará con
los equipos en funcionamiento. Dichas protecciones y su procedimiento de instalación quedan claramente
descritas en los planes de trabajo correspondientes.
El montaje de los nuevos PC’s SIEMENS HMI y sus mouses, se hacen en placas de acero inoxidables,
pulidas y fijadas por medio de pernos al gabinete correspondiente.
Los trabajos se deben realizar con el siguiente orden:
Ø
Retirar todos los equipos involucrados (interfases HMI actuales) y proteger los comprometidos con el
trabajo, PLC y accesorios que quedan en funcionamiento, dentro y fuera del gabinete.
Ø
Habilitar y probar la interfaz HMI provisoria.
Ø
Realizar el trabajo de corte y perforación necesario.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 4 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA II Y III.
Ø
Instalar el nuevo equipo.
Ø
Retirar las protecciones usadas para los trabajos mecánicos.
Ø
Realizar las modificaciones eléctricas necesarias para el funcionamiento del nuevo sistema.
85
Todos los trabajos anteriores quedan detallados en el plan de trabajo asociado. Además, para la
elaboración de los planes se consultó con el personal de mantenimiento mecánico y general (según fue el
caso) la mejor forma de llevar a cabo esta tarea a fin de evitar posibles errores.
Las siguientes figuras muestran los planos de los equipos en donde se realizaran estas modificaciones.
Los planos con las modificaciones definitivas se encuentran en el anexo.
Figura 4.46. Gabinete Desales Planta II.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 4 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA II Y III.
86
Figura 4.47. Gabinete Polisher Planta II.
Figura 4.48. Gabinete Polisher Planta II.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 4 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA II Y III.
87
Figura 4.49. Gabinete Desales AB Planta III.
Figura 4.50. Gabinete Polisher Planta III.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 4 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA II Y III.
88
Figura 4.51. Gabinete Polisher Planta III.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 5 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA I.
5.1
89
Configuración de la base de datos de la unidad Polisher en CITECT.
Para la configuración de la base de datos del Polisher de Planta I en Citect, se deben seguir los
mismos pasos indicados en la sección 4.1.
5.2
Diseño de las nuevas interfases gráficas en el sistema SCADA y DCS Delta V.
Las interfases gráficas que se utilizan en CITECT del Polisher de Planta I, serán las genéricas que se
utilizarán en los otros equipos, por lo tanto son las mismas que aparecen en la sección 4.2.
Las interfases gráficas que se implementarán en el DCS DeltaV, se muestran a continuación, éstas
fueron diseñadas siguiendo las mismas consideraciones que se utilizaron para los demás equipos de las otras
Plantas, sin embargo se debe mencionar que la función que se va a desarrollar a través de ellas en el DCS
DeltaV de Planta I, es sólo el monitoreo del funcionamiento del Polisher.
Ø
Interfases Gráficas para el Polisher de Planta I, en el DCS DeltaV.
Figura 5.1. Vista general de la unidad.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 5 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA I.
90
Figura 5.2. Vessel X-605A.
Figura 5.3. Vessel X-605B.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 5 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA I.
91
Figura 5.4. Vessel X-605C.
Figura 5.5. Planta de ácido y soda.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 5 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA I.
92
Figura 5.6. Status de equipos.
Figura 5.7. Secuencia de Regeneración.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 5 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA I.
93
Figura 5.8. Puntos de Ajuste (Set Points) de Alarmas de Proceso.
Figura 5.9. Puntos de Ajuste (Set Points)de Alarmas de Regeneración.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
94
CAPÍTULO 5 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA I.
5.3
Descripción de las interfases Gráficas.
Las figuras anteriores muestran las interfases gráficas creadas en DeltaV, para el monitoreo del
funcionamiento del Polisher en Planta I, las cuales son:
Ø
Una interfaz que entrega una visión general de la unidad Polisher de Planta I, en la cual aparece
resumido todo el sistema junto con sus principales componentes. Figura 5.1
Ø
Las Figuras 5.2, 3 y 4, muestran el detalle de cada Vessel que compone el Polisher, junto con todas
las válvulas asociadas a cada uno y el estado en que se encuentran, además cuentan con botones
gráficos que permiten la navegación entre las diferentes interfases.
Ø
La Figura 5.5 muestra la planta de ácido y soda, componentes necesarios para la regeneración.
Ø
El estado de los principales componentes del Polisher se puede ver en la Figura 5.6.
Ø
La interfaz que muestra el avance del proceso de regeneración se presenta en la Figura 5.7.
Ø
Las interfases de alarmas se muestran en las Figuras 5.8 y 5.9. La Figura 5.8 muestra los ajustes de
las alarmas para el proceso y la Figura 5.9 muestra los ajustes de las alarmas para la regeneración.
5.4
Configuración de Hardware y Comunicaciones.
Como la comunicación entre CITECT y el PLC en este caso será igual a los otros equipos de este tipo,
entonces se configura de la misma manera que aparece en la sección 4.1.
La configuración en DeltaV es diferente, se detalla a continuación:
Se propuso que la comunicación entre el PLC del Polisher de Planta I (PLC 105) y el DCS Delta V, se
haga a través de una red MODBUS PLUS, sin repetidor directo desde el PLC, ingresando posteriormente a la
red serial 485 de Planta I a través de uno de los Bridge de comunicación, en donde se encuentran conectados
dispositivos tales como: PLC 102, PQM, etc. Dicha modificación queda ejemplificada en el plano C106
modificado que se encuentra en el anexo.
También se propuso cambios en las direcciones de los dispositivos involucrados, tal como aparecen en
el plano antes mencionado. El propósito de llevar a cabo dichos cambios es estandarizar las direcciones de
dichos equipos en las tres plantas. Por ejemplo PLC 105, dirección 5.
La Figura 5.10, presenta un esquema general de la interconexión del sistema que se propuso para
Planta I.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
95
CAPÍTULO 5 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA I.
Figura 5.10. Instalación proyectada para el PLC de Polisher de Planta I y su conexión con el DCS.
5.4.1
Configuración del Módulo de Comunicación Serial en DeltaV.
La interfaz serial DeltaV provee de comunicación a varios dispositivos seriales, incluyendo los PLC’s,
A través del protocolo MUDBUS RTU o ASCII (en modo maestro o esclavo). La interfaz serial soporta RS232,
RS422/485 half duplex o RS422/485 full duplex.
La Figura 5.11 muestra un esquema de la conexión de la tarjeta con el controlador DeltaV, y la Figura
5.12 muestra el diagrama de conexiones entre la tarjeta y el dispositivo serial.
Figura 5.11 Esquema descriptivo para la conexión serial.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
96
CAPÍTULO 5 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA I.
Figura 5.12 Pin-out para la interconexión entre DeltaV y el dispositivo externo.
La tarjeta serial tiene dos puertos de comunicación, y cada puerto se puede conectar a un dispositivo
serial usando una conexión RS232 (punto a punto) ó se puede conectar a una red de dispositivos seriales
utilizando una conexión RS422/485, hasta 16 dispositivos.
La interfaz intercambia los datos con el dispositivo serial a través de un ‘Dataset’, una colección de
parámetros DeltaV que corresponden a registros en el dispositivo serial. La configuración del ‘Dataset’,
determina el tipo de registros, la dirección de partida y la cantidad de registros que serán leídos o escritos.
Cada tarjeta serial soporta 16 Dataset que pueden ser configurados en un único dispositivo serial o
repartidos entre los dispositivos que conforman la red (si existe). Cada interfaz serial se puede comunicar con
un máximo de 250 registros.
La figura 5.13 muestra el flujo de datos entre DeltaV y un dispositivo serial.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
97
CAPÍTULO 5 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA I.
Figura 5.13 Detalle descriptivo del flujo de datos.
La interfaz serial requiere los datos desde el PLC a través de su puerto serial, el tipo, número y
dirección de partida de los datos a ser requeridos son todos parte de la configuración del Dataset. El Dataset
con los registros y sus respectivos valores quedan disponibles dentro de DeltaV como DST’s.
La configuración de la interfaz serial requiere de los siguientes pasos:
Ø
Conectar la tarjeta serial en el slot apropiado del rack del controlador.
Ø
Configurar la tarjeta en el slot en que se ha conectado.
Ø
Definir las propiedades del puerto.
Ø
Definir el dispositivo y su dirección.
Ø
Definir el dataset.
Las figuras precedentes presentan detallan el procedimiento de configuración de la interfaz serial en DeltaV.
Una vez insertada la tarjeta en el slot del rack del controlador, se debe configurar en DeltaV. Primero se
agrega una nueva tarjeta en el controlador seleccionado, tal como muestra la Figura 5.14. Después se
configura las propiedades de comunicación del puerto. En las Figuras 5.15, 16, 17, 18 se aprecia claramente
esta configuración, los parámetros a ajustar son los típicos para una comunicación RS-232, los mismos fueron
usados en el proyecto. En la Figura 5.19 se aprecia como queda configurada la tarjeta serial en DeltaV
Explorer.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
98
CAPÍTULO 5 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA I.
Para la creación de los Dataset, se debe ir sobre la tarjeta configurada (P01 en Figura 5.19), y sobre
ella con el botón derecho seleccionar Create dataset, aparecerá entonces el cuadro de diálogo de la Figura
5.20.
Para configurar completamente el dataset asignado a la tarjeta se debe completar los campos que
aparecen en las Figuras 5.21 y 22. Los campos se deben completar según la necesidad de lectura de las
variables. Las Figuras 5.23 y 24 muestran el detalle de la creación de los dataset en DeltaV Explorer.
Figura 5.14 Creación de Nueva Trajeta
Figura 5.15 Descripción del nuevo dispositivo.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Figura 5.16 Configuración del protocolo
Angel Oyarzo / 2005
99
CAPÍTULO 5 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA I.
Figura 5.17 Configuración de la comunicación.
Figura 5.18 Configuración de la dirección del dispositivo a leer.
Figura 5.19 Apariencia en DeltaV Explorer.
Figura 5.20 Asignación de R/W para el dataset.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Figura 5.21 Configuración tipo de dato y fuente.
Angel Oyarzo / 2005
CAPÍTULO 5 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA I.
100
Figura 5.22 Configuración del tipo de dato y la cantidad de registros asignados.
Figura 5.23 Dataset configurado, visto en DeltaV Explorer.
Figura 5.24 Detalle del dataset configurado.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 5 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA I.
5.4.2
Ø
101
Configuración de las Variables de Monitoreo y Alarmas.
Monitoreo.
Para asignar una variable leída desde el PLC al display de operador, primero se debe editar la interfaz
en DeltaV Operate en modo de configuración, y desde allí con la herramienta Datalink Stamper se asigna la
variable, tal como se ve en la Figura 5.25.
Figura 5.25 Asignación de variable en DeltaVOperate Configurator.
En el cuadro de diálogo Datalink , no se cambió la configuración de ninguna entrada, con excepción del
campo Source, que es donde se asigna la fuente de la variable a desplegar. Al hacer clic sobre el botón de
búsqueda (marcado con un círculo rojo), aparecerá el cuadro de diálogo de la aplicación Expression Builder
Browser de DeltaV , como se ve en la Figura 5.26.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 5 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA I.
102
Figura 5.26 Expresion Builder.
Como la aplicación proyectada es solamente de monitoreo, el único parámetro modificable aquí es el
Refresh Rate (frecuencia de actualización de la variable, en segundos), que finalmente fue asignado por el
personal de proceso de acuerdo a sus requerimientos.
Se accede a la fuente de la variable a configurar presionando en la etiqueta DeltaV, tal como se ve en
la Figura 5.27, y haciendo clic en el botón Browse DeltaV Control Parameters aparece otro cuadro de diálogo
de donde se selecciona finalmente la variable a leer. Figura 5.27.
Figura 5.27 Fuente de la variable a configurar.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 5 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA I.
103
Figura 5.28 Variable a desplegar.
Ahora, de vuelta en Expresion Builder, aparece la ubicación de la variable a visualizar y, aquí se
modifica el registro final que se quiere ver, en este caso el 100001 del PLC103, del Polisher de Planta I. La
Figura 5.29 muestra, remarcado en rojo, la ubicación de la variable.
Así finalmente, queda configurada la variable a visualizar en la interfaz gráfica de operador.
El procedimiento debe repetirse para cada una de las variables que se desean configurar en las distintas
interfases gráficas de operador.
Ø
Alarmas.
Para la asignación de alarmas en DeltaV primero se debe crear un módulo en la aplicación Control
Studio que contenga un bloque al cual se le asigna la alarma. La Figura 5.29 muestra la creación del bloque y
la Figura 5.30 la asignación de las propiedades de entrada-salida.
Para acceder al cuadro de diálogo de las propiedades de entrada-salida se debe hacer doble clic en
Parameter View (ventana de parámetros del módulo), en donde aparece indicado con la flecha roja en la Figura
5.30.
La propiedad que se le asigna al módulo (en este caso un módulo de entrada discreto) es el Dataset
del cual va a leer el registro, que para el ejemplo es el 10001. Figura 5.30.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 5 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA I.
104
Figura 5.29 DeltaV Explorer, módulos asignados.
Figura 5.30 Control Studio, asignación del registro.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 5 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA I.
105
Figura 5.31 Ajuste de propiedades de alarma.
Figura 5.32 Dispositivo dentro del módulo a configurar.
Figura 5.33 Dispositivo asignado.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
106
CAPÍTULO 5 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA I.
Parameter View
Alarm View
Figura 5.34 Detalle en ControStudio de módulo configurado.
Figura 5.35 Propiedades generales del módulo.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Figura 5.36 Propiedades de ejecución del módulo.
Angel Oyarzo / 2005
107
CAPÍTULO 5 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA I.
Figura 5.37 Propiedades de visualización del módulo.
Figura 5.38 Herramientas de descarga del módulo.
Controlador usado
para las pruebas.
Figura 5.39 Asignación de Controlador.
Figura 5.40 Detalle del proceso de descarga.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Figura 5.41 Descarga exitosa.
Angel Oyarzo / 2005
108
CAPÍTULO 5 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA I.
Figura 5.42 Vista en la pantalla de operador de la activación de la alarma configurada.
Seguidamente, a lo antes descrito, se ajustan las propiedades de la alarma, se accede a ellas
seleccionando un bloque en Control Studio, en Alarm View aparecen las alarmas pre-asignadas al bloque (ver
Figura 5.34), aquí es donde se ajustan las propiedades de la alarma. Al hacer doble clic, aparece el cuadro de
diálogo de la Figura 5.31 en donde se ajustan las propiedades, las Figuras 5.32, 33 y 34, muestran como se
debe configurar la fuente de la alarma, que en este caso está en el bloque AAH6495 seleccionado en la figura
5.30. Recordar que al seleccionar un bloque sus propiedades de alarmas aparecen en Alarm View.
En la Figura 5.34, destacado en azul, se ve configurada la alarma en el bloque, que para este caso es
una alarma discreta. Recordar que todas las alarmas vienen desde el PLC, para esta aplicación DeltaV no las
procesa, sino sólo muestra su estado en las pantallas de operador.
Una vez asignadas las propiedades de alarma al bloque seleccionado, se debe configurar las
propiedades del módulo AAH6495 (no confundir con bloque de aplicación dentro de Control Studio, pues tienen
el mismo nombre). Para realizar esto se debe ir a DeltaV Explorer en Assigned Modules, buscar el módulo a
configurar (Figura 5.29), seleccionarlo y con botón derecho del mouse aplicar Properties entonces aparecerá el
cuadro de diálogo de la Figura 5.35. La configuración de los parámetros de éste aparece detallado en las
Figuras 5.36, 37, 38, 39.
Configurados los parámetros, se debe descargar (grabar) todos los cambios realizados anteriormente
desde el módulo al controlador que correrá la aplicación. Lo anterior se lleva a cabo primeramente asignando el
módulo al controlador, en la Figura 5.38 se debe seleccionar Assign Now, entonces aparecerá el cuadro de la
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
109
CAPÍTULO 5 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA I.
Figura 5.39, aquí aparece la lista de controladores que están configurados en el DCS y se selecciona el
controlador deseado, en este caso sólo aparece uno, pues la ingeniería del proyecto se realizó en el laboratorio
de pruebas y no con el DCS en funcionamiento.
A continuación se debe verificar la integridad del módulo (que todos los cambios realizados son
correctos), presionado Verify Now (Figura 5.39) y finalmente se descarga toda la programación al controlador
presionando Donwload Now, el proceso de descarga se ve en las Figuras 5.40 y 41. La Figura 5.42 muestra
como aparecerá la alarma asignada al módulo en la pantalla de operador.
5.5
Diseño de la Red de Comunicación entre el PLC de Polisher de Planta I y el DCS.
Como se mencionó anteriormente, la comunicación entre el PLC de Polisher y el DCS se propuso
realizarla directamente el PLC del Polisher al DCS, como lo muestra la Figura 5.10.
Primeramente se decide el trayecto desde el PLC hacia sala de control, a través de la planta y se
verifica que la distancia entre ellos esté dentro de la permitida para una comunicación MODBUS PLUS.
Los planos abajo listados y agregados en el anexo, muestran el trayecto a seguir a través de la planta
por la línea MODBUS PLUS (MB+) que parte en el PLC y termina en sala de control.
6129-50-704-D1
6129-50-704-D2
6129-50-704-D3
6129-50-704-D4
Las siguientes figuras muestran el camino que sigue el cable de comunicación (en amarillo) para esta
instalación, desde la salida del gabinete del Polisher hasta Sala de Control. El objetivo de presentar éstas, es
ayudar a comprender mejor la idea del trabajo a realizar. Para el ingreso en sala de control, se debe guiar por
las Figuras 5.50, 51, y 52.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
110
CAPÍTULO 5 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA I.
Figura 5.43 Salida del cable de comunicación desde el PLC.
Figura 5.45. Salida del gabinete, vista frontal.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Figura 5.44. Salida del cable de comunicación del gabinete.
Figura 5.46. Salida del gabinete, desde entrada al edificio.
Angel Oyarzo / 2005
111
CAPÍTULO 5 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA I.
Figura 5.47. Salida del cable del edifcio, vista desde el gabinete
Figura 5.49. Salida del edificio, vista frontal.
Figura 5.51. Entrada a Sala de control, vista frontal.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Figura 5.48. Salida del edifico, vista desde la entrada.
Figura 5.50. Salida desde bandeja principal hacia sala de control.
Figura 5.52. Entrada a Sala de control, vista lateral.
Angel Oyarzo / 2005
112
CAPÍTULO 5 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA I.
En las figuras anteriores, la canalización está marcada con amarillo y no se aprecia el recorrido del
cable por medio de la planta. Lo anterior queda claramente establecido en los planos antes señalados. De
todas formas la bandeja seleccionada para transportar el cable a través de la planta es la “T50L10” y sus
prolongaciones, tal como se ve en los planos correspondientes.
El cable de comunicación seleccionado es del tipo “Belden 9841”, recomendado por el fabricante, y en
todo su trayecto está canalizado a través de conduit flexible metálico, tipo anaconda, de ½” de diámetro.
La canalización y el cable son continuos desde el PLC hasta la sala de control. El conduit está
asegurado al gabinete del polisher a través de los bushing correspondientes, tal como se ve en la Figura 5.44.
De la misma forma se hizo en la entrada de sala de control, por la parte interior (gabinetes).
Se menciona que el cable quedó a la espera de la instalación del sistema DeltaV dentro de sala de
control.
Como el cable es continuo desde el PLC hasta Sala de Control, fué necesario conectar dos terminales
MB+, del tipo AS-MBKT-185. Cada terminal va en cada extremo del cable, uno está conectado al terminal MB+
del PLC y el otro al terminal MB+ del Bridge (convertidor MB+ -- MODBUS RTU, suministrado por otro
proyecto).
Para ensamblar los terminales correspondientes se deben seguir las indicaciones de las figuras
siguientes.
Figura 5.53. Conectores MB+ a utilizar en PLC 105 y Bridge.
Figura 5.54. Detalle de la preparación del cable MB+ para su conexión.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
113
CAPÍTULO 5 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA I.
Figura 5.55. Detalle del terminal de conexión MB+.
Figura 5.56. Conexión de cables en terminales .
Figura 5.57. Conexión de terminales de línea.
Una vez conectados ambos terminales, se conectarán al terminal MB+ del PLC uno, y el otro al
Bridge utilizado para este propósito que se ubicará en sala de control, tal como muestra la Figura 5.10.
La comunicación entre el PLC y el sistema CITECT, será serial Modbus RTU, por lo cual se deberán
utilizar conectores DB-9 en ambos equipos, para conectar el PLC al CITECT, tal como se hizo en la sección
4.5.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 5 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA I.
114
En la figura 5.58 aparece enmarcado con rojo la parte de la red a modificar. En el plano modificado,
incorporado en el anexo, se propone un cambio a la configuración de las direcciones en la red 485 de Planta I,
tal como se aprecia allí. La idea es poder insertar el Polisher dentro de esta red sin crear conflictos con los
demás dispositivos. También se muestra la conexión entre el PLC y CITECT.
Figura 5.58. Red de comunicación MB+ Planta I.
5.6
Modificación del Sistema Eléctrico para la instalación de la nueva red de control y del Sistema
Scada.
La modificación del sistema eléctrico en el gabinete del Polisher de Planta I, es más compleja que en el
caso de las otras Plantas. Aquí se debieron retirar equipos antiguos, lo que implica desconexiones parciales de
la instalación eléctrica existente. Los planos a continuación listados e incorporados en el anexo, muestran las
modificaciones eléctricas realizadas.
T-37517A-1-6
T-37517A-2-6
T-37517A-3-6
T-37517A-4-6
T-37517A-5-6
T-37517A-6-6
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
115
CAPÍTULO 5 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA I.
Para este caso no se presentan figuras, pues no todos los planos están en formato digital.
5.7
Modificaciones estructurales.
Para el caso de las modificaciones estructurales, de igual manera que en el punto anterior, los planos
siguientes e incorporados en el anexo muestran las modificaciones estructurales propuestas:
T-37518C-1-2
T-37518C-2-2
Con el fin de aclarar más los trabajos a realizar en este punto, las siguientes Figuras muestran los
dispositivos a retirar desde el Polisher y un aspecto general de como quedaría.
Figura 5.59. Dispositivos a retirar del gabinete.
Figura 5.60. Aspecto final del gabinete Polisher.
Figura 5.61. Dispositivos a retirar, vistos desde el interior del gabinete.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
116
CAPÍTULO 5 – IMPLEMENTACIÓN DEL SISTEMA DE CONTROL SUPERVISOR SCADA CITECT EN PLANTA I.
Figura 5.62. Otros dispositivos a retirar desde el gabinete, en la realización de las modificaciones eléctricas.
Para la realización de los trabajos de modificación estructural en esta unidad, se siguieron las mismas
indicaciones y sugerencias hechas con anterioridad para los trabajos estructurales de los demás equipos
ubicados en las otras plantas.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
117
CAPÍTULO 6 CONCLUSIONES.
6.1
CONCLUSIONES.
El presente trabajo está basado en la realización de la Ingeniería de Detalles de la Instrucción de
Modificación
Técnica
denominada
“ACTUALIZACIÓN
DEL
SISTEMA
SCADA
EN
POLISHER
Y
DESALINIZADORAS DE PLANTAS I II Y III”. 1ra Parte: Trabajos Eléctricos, Mecánicos, Comunicación e
Interfases Gráficas HMI”. Realizada en el complejo industrial Methanex Chile, como parte del proyecto de
actualización del sistema SCADA en Polishers y Desales. Dicha ingeniería entrega una de las propuestas
técnicas para la implementación y ejecución de los trabajos a realizar en las distintas unidades.
Este proyecto se desarrollará en forma gradual debido a la complejidad que conlleva reemplazar los
sistemas antiguos por los nuevos, además del tiempo que toma por unidad este reemplazo. Se estima que a
mediados o fines del 2006 ya estén operando todas las unidades actualizadas.
Durante el desarrollo de la ingeniería de detalles, se comprobaron una serie de alternativas técnicas,
incrementando el acervo tecnológico, la experiencia y conocimientos necesarios a tener en consideración al
momento de desarrollar un trabajo como éste, en donde estuvieron involucrados equipos industriales, sistemas
de control y supervisión.
La tendencia actual en el control de procesos industriales está orientada esencialmente al
mantenimiento predictivo y no al correctivo. Mediante el mantenimiento predictivo se puede determinar el
origen de una falla en el sistema, lo que significa para una empresa ahorro de dinero, ya que es mucho menos
perjudicial para los equipos involucrados, una parada programada a una no deseada.
Con la ejecución de este proyecto, el cuál se implementará en forma gradual por la imposibilidad de
detener todas las unidades involucradas, se logrará actualizar todo el sistema de monitoreo y supervisión local
de las unidades Polishers y Desales de todo el complejo industrial. Lo anterior permitirá una interfaz con el
operador mucho más amistosa ya que todas las interfases gráficas fueron creadas asimilando lo que está
actualmente en funcionamiento en las pantallas de operador de sala de control. Adicionalmente, como la
política actual de la compañía es que todos los operadores conozcan todos los procesos, ayudará a aquellos
operadores que no conocen estas unidades a interactuar con ellas de manera más intuitiva y comprender mejor
su funcionamiento.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
118
CAPÍTULO 6 CONCLUSIONES.
Los equipos que se instalarán, son de última generación y cumplen con todos los estándares de planta,
por lo que se garantiza que una nueva actualización del sistema no será necesaria en el corto ni mediano
plazo. Además como está proyectado migrar todo el DCS actual al nuevo DCS DeltaV, la plena compatibilidad
de estos equipos, permite proyectar un futuro control de las unidades desde el DCS DeltaV sin tener que
realizar trabajos de adaptación significativos.
Dentro del desarrollo de la ingeniería se evaluaron distintas opciones de equipamiento para realizar
este proyecto, sin embargo se optó por modificar lo menos posible el sistema y elegir equipos que tengan una
representación conocida. Lo anterior se hizo así para tener una disponibilidad de partes, piezas y soporte
técnico garantizado por todo el tiempo de duración del proyecto y no quedar sin respaldo como ocurrió con los
equipos antiguos.
En el caso de la elección del sistema supervisor para el desarrollo de la presente ingeniería y
entregarlo como propuesta de implementación, se optó por CITECT por ser un software de altas prestaciones,
como se pudo ver en el presente trabajo. Pero una de las razones principales fue que ya está instalado en
planta por lo tanto el personal de mantenimiento ya tiene la capacitación y experiencia en la operación de
CITECT, y con esto se cumple con la política de la compañía en cuanto a estandarizar todos los equipos
instalados en el complejo. Sin embargo, si bien el sistema CITECT es usado en otras aplicaciones y con él se
desarrolló el estudio técnico de la presente memoria se debe aclarar que existen otras alternativas de sistema
SCADAS las cuales a diferencia de este tienen la ventaja de tener soporte y representante en Chile.
Para la elección de la forma de comunicación entre los distintos PLC y CITECT se optó por cambiar de
la antigua MODBUS PLUS a MODBUS RTU. La razón, la red MODBUS PLUS instalada sólo comunicaba los
paneles con el PLC y no se aprovechaba la posibilidad de comunicación en red que provee ésta además el
barrido de las variables desde el PLC hacia los paneles no resultó ser más rápido de lo que soporta MODBUS
RTU para esta aplicación, entonces no había razón para mantener la configuración original. Sin mencionar
también que el costo de mantener la configuración original no tiene relación con el costo de implementar
MODBUS RTU, puesto que en la primera se debe adquirir hardware adicional de un elevado costo.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005
CAPÍTULO 6 CONCLUSIONES.
119
Aún en planta quedan equipos con tecnología de primera generación, incluso de relés, que no cuentan
con paneles de supervisón local ni menos comunicación, además de estar vulnerables a falla y nodisponibilidad inmediata de repuestos. Este trabajo entrega la base técnica para realizar las actualizaciones en
el sistema de control supervisor de estos equipos y como comunicarlos con el nuevo sistema de control, lo cual
no está lejano en el tiempo.
Es importante destacar el hecho de que un equipo cuente con un sistema de supervisión local como el
proyectado aquí. Pues, permite saber tempranamente donde se originan las fallas y solucionar el problema que
las ocasiona,
disminuyendo el tiempo de detención y el costo que esto significa. Además de la fácil
comprensión del funcionamiento de éste por parte del operador puesto que las interfases gráficas entregan una
visión completa del funcionamiento de la unidad.
Finalmente, es destacable el hecho de que la metodología, estándares de trabajo, normativas y
equipos industriales utilizados a través del desarrollo de este proyecto es aplicable en cualquier industria con
estándar internacional lo que me permitirá trabajar en el desarrollo de proyectos, mantenimiento y planificación
de sistemas de control industrial en cualquier parte del mundo.
ACTUALIZACIÓN INTERFAZ DE OPERACIÓN DEL SISTEMA SCADA
EN PURIFICADORAS Y DESALINIZADORAS.
Angel Oyarzo / 2005