tecnología iv - iesparearques.net
Anuncio

1
LA CONTROLADORA PICAXE EN TECNOLOGÍA
ÍNCICE
Fabricación de circuitos impresos por transferencia térmica
3
Introducción a los microcontroladores
6
Construcción de un entrenador PICAXE08
8
Construcción de un entrenador PICAXE18
16
Comandos básicos
22
Amplificador de salidas ULN2003
29
Placa de control de motores
31
Experimentando con una LDR
34
Experimentando con una NTC
42
Construcción microrrobot controlado por PICAXE
44
Barrera de infrarrojos
66
Construcción móvil controlado por PICAXE
70
Cruce de semáforos controlado por PICAXE
73
La casa soñada
78
Barrera electromecánica
89
2
LA CONTROLADORA PICAXE EN TECNOLOGÍA
Fabricación de circuitos impresos por
transferencia térmica:
Este método consiste en imprimir el diseño del circuito con una impresora
láser (o hacer una fotocopia) y posteriormente transferir mediante calor el
tóner del papel a la cara del cobre de la placa virgen. Como el tóner es
resistente al ácido, todo lo que haya quedado cubierto por esta sustancia
estará preservado de la solución corrosiva.
Los pasos que hay que seguir para obtener un circuito impreso por este
método son los siguientes:
1. Diseño del circuito impreso
Se hace a partir del esquema del circuito usando un programa
informático o bien por el método tradicional (a mano). Nosotros hemos
optado por la primera opción y hemos usado el programa PCBwizard
para la obtención del esquema del circuito impreso.
2. Impresión láser del fotolito.
Se imprime con una impresora láser a escala 1:1, tal y como se vería
desde la cara de los componentes (modo espejo). Si no disponemos de
impresora láser podemos utilizar otra cualquiera y posteriormente
fotocopiar el resultado. Es fundamental usar un papel de calidad lo más
satinado posible. También se obtienen excelentes resultados con papel
fotográfico EPSON PHOTO PAPER SO41141.
Antes de realizar un proyecto es conveniente realizar una probeta con
un pequeño trozo de placa virgen para verificar que el papel que vamos
a usar es el adecuado.
3. Preparación de la placa virgen
Lo primero que hay que hacer es cortar un trozo del tamaño exacto y
quitar con una lima las rebabas. Después hay eliminar totalmente la
suciedad y el óxido puliendo la cara metálica con lana de acero para
cobre o lija al agua del Nº 600, hasta que la superficie metálica quede
brillante. Por último, es necesario desengrasar la superficie del cobre
usando acetona o cualquier disolvente de similares propiedades. El
método de limpieza más eficaz es dar dos pasadas usando dos papeles
de cocina. La primera pasada elimina la mayor parte de la suciedad y la
segunda, con un papel nuevo deja la superficie impecable. Una vez
terminado el proceso de limpieza, es fundamental no tocar con los
dedos la cara del cobre de la placa y no dejar pasar mucho tiempo entre
la limpieza de la placa y el ataque de la misma, pues podría volver a
formarse una capa de óxido.
4. Planchado
Ésta es la parte más delicada. Usaremos una plancha normal a su
máxima temperatura (sin vapor), un trozo de papel de cocina y una
tabla o similar para apoyar. Lo primero que tenemos que hacer es
colocar el fotolito sobre el cobre, de manera que el tóner toque la cara
del cobre de nuestra placa. Se puede asegurar el papel sobre la placa
con pequeños trozos de cinta adhesiva pues es fundamental que no se
3
LA CONTROLADORA PICAXE EN TECNOLOGÍA
mueva durante este proceso. Posteriormente, colocaremos la placa con
el papel dentro de un trozo de papel de cocina doblado para evitar el
contacto directo con la plancha y procederemos a “planchar” sobre el
papel que cubre la placa. Se debe tener el cuidado de presionar el
centro y los bordes por igual utilizando la parte central de la plancha
suavemente, sin apretar mucho, durante cuatro o cinco minutos, para
que el tóner se funda y adhiera al cobre. El cambio de color del papel
que cubre la placa es síntoma de que se ha aplicado la cantidad de calor
adecuada. Una vez llegado a este punto, para evitar que el papel
encoja, es necesario sumergir inmediatamente la placa en agua
jabonosa, y dejar reposar durante unos 20 minutos.
5. Despegado del papel
Después de unos 20 minutos procederemos a retirar el papel que cubre
la placa. Si el proceso ha salido bien, el papel ha de desprenderse con
mucha facilidad, sin hacer ninguna fuerza y ha de salir “limpio” (sin
restos de tóner). Si notamos que está aun pegado al cobre debemos de
volver a sumergirla y esperar más tiempo.
6. Lavado
Una vez retirado el papel es necesario limpiar la placa para retirar los
restos de celulosa y ceras que puedan interferir en el proceso de ataque
químico. Para ello, frotaremos con una esponja suave impregnada con
jabón líquido y agua abundante durante aproximadamente un minuto.
7. Corrección de errores
Si hubiese algún defecto en alguna pista, podemos corregirlo con un
rotulador adecuado (Edding 3000), sobre la placa seca. Para mejorar la
calidad de estos “parches” se pueden dar varias capas de rotulador.
8. Inmersión en solución corrosiva
A continuación se numeran los atacadores más usuales:
a) Atacador lento comercial: su composición es cloruro férrico y se
vende en forma de perlas, en envases de distinto tamaño, para diluir
en agua. El tiempo necesario para atacar una placa es muy alto y
depende de la temperatura a la que se encuentre el líquido corrosivo.
En el caso de una temperatura ambiente muy baja puede superar las
6 horas. Se recomienda calentar la mezcla al baño maría hasta
temperatura de unos 35 grados. No se deben superar los 40 grados.
b) Atacador lento casero: es una mezcla de una parte de agua fuerte
(salfumant) y dos de agua oxigenada de 10 volúmenes. Es bastante
lento y no deja de ser peligroso.
c) Atacador rápido comercial: se suele vender en dos recipientes, una
botella de ácido clorhídrico al 16% (muy diluido pero peligroso) y un
recipiente de perborato sódico (oxidante sólido en polvo). El contenido
de estos dos recipientes se mezcla en un recipiente de plástico. Se
puede utilizar esta mezcla para varias ocasiones.
d) Atacador rápido casero: este sistema es más casero y económico.
Se compone de agua fuerte y agua oxigenada de 110 volúmenes
(muy importante que sea de 110 volúmenes, ya que el agua
4
LA CONTROLADORA PICAXE EN TECNOLOGÍA
oxigenada de botiquín es de 10 volúmenes). Estos líquidos se
mezclan con agua en la proporción 2:1:2 (agua: agua oxigenada:
agua fuerte).
Esta proporción depende del la experiencia de cada persona, con
proporciones más altas de agua se puede reducir la velocidad de
atacado (un atacado muy rápido produce gran cantidad de vapores
tóxicos y calor).
El proceso del atacado no tiene misterio. Utilizaremos pinzas de plástico
para manejar la placa y guantes de látex para evitar quemaduras y no
dejar nuestras huellas en el cobre. Si no disponemos de una bandeja de
plástico podemos emplear un táper que ya no servirá para otra cosa.
Para la realización de placas por transferencia térmica, los mejores
resultados se obtienen con atacadores rápidos.
9. Lavado y eliminación del tóner: Una vez concluido el atacado,
procederemos a sumergir la placa en agua para detener la reacción y
lavaremos con abundante agua y jabón para eliminar los restos de ácido
y sales corrosivas. El atacado finaliza cuando todo el cobre que no está
enmascarado desaparece. Si vemos que hay alguna zona en la que no
se va el cobre, pese a que el ácido está empezando a comerse parte de
las pistas, lo mejor es dar por concluido el atacado y retirar
manualmente el cobre que nos molesta. Si el ácido se ha comido parte
de alguna pista, la repararemos con estaño. Después de reparar los
posibles fallos, habrá que verificar con un multímetro que existe
continuidad en las pistas y no hay cortocircuitos.
10. Taladrado, soldadura y acabado: Finalmente sólo queda la parte de
taladrado y protección de la placa. Para hacer los agujeros, se necesita
una broca de 0,7mm para la mayoría de los componentes típicos, y una
de 1mm o incluso mayor para los componentes con patillas más anchas.
Justo antes de comenzar a soldar es conveniente limpiar las pistas con
lana de acero para cobre para retirar el oxido que haya podido formarse.
Para terminar de realizar la placa se puede aplicar una capa protectora
anti óxido. El FLUX SK10 es una resina que al secarse deja una capa
protectora soldable. El PLASTIK 70 es un barniz sintético, por lo que es
recomendable aplicarlo en un lugar aireado. También recomiendo que
para este producto se aplique la capa después de soldar, ya que es
difícil soldar con la capa aislante.
Y con esto ya tendremos nuestro circuito impreso casero con aspecto
profesional
5
LA CONTROLADORA PICAXE EN TECNOLOGÍA
INTRODUCCIÓN A LOS
MICROCONTROLADORES
Controlador y microntrolador
Recibe el nombre de controlador el dispositivo que se emplea para el
gobierno de uno o varios procesos. Por ejemplo, el controlador que regula
el funcionamiento de un horno dispone de un sensor que mide
constantemente su temperatura interna y, cuando traspasa los límites
prefijados, genera las señales adecuadas que accionan los actuadores
que intentan llevar el valor de la temperatura dentro del rango estipulado.
Aunque el concepto de controlador ha permanecido invariable a través del
tiempo, su implementación física ha variado frecuentemente. Hace tres
décadas, los controladores se construían exclusivamente con
componentes
discretos,
posteriormente
se
emplearon
los
microprocesadores, que se rodeaban con chips de memoria y E/S sobre
una placa de circuito impreso. En la actualidad, todos los elementos del
controlador se han podido incluir en un chip, el cual recibe el nombre de
microcontrolador. Realmente consiste en un sencillo pero completo
ordenador contenido en el corazón de un circuito integrado.
Microntroladores
Como se ha visto anteriormente, un microcontrolador es un circuito
integrado programable que contiene todos los componentes necesarios
para controlar el funcionamiento de una tarea determinada, como el
control de un microondas, un teclado de un ordenador, una impresora, un
sistema de alarma, etc. Para esto, el microcontrolador precisa de muy
pocos componentes asociados. La utilización de microcontroladores en
un circuito, reduce notablemente el tamaño y el número de componentes
y, en consecuencia, disminuye el número de averías, el volumen, el peso
y el precio de los equipos, entre otras ventajas.
El microcontrolador nace cuando las técnicas de integración han
progresado lo suficiente para permitir su fabricación; pero también
porque, muy a menudo, tanto en las aplicaciones domésticas como
industriales, se tiene la necesidad de sistemas “inteligentes” o, al menos
programables.
El microcontrolador uno de los inventos más notables del siglo XX. En el
mercado hay gran cantidad de ellos, con multitud de posibilidades y
características.
Microcontroladores PIC
En los últimos años han tenido gran auge los microcontroladores PIC
(Peripheral Interface Controller) son una familia de microcontroladores
que ha tenido gran aceptación y desarrollo en los últimos años, gracias a
que sus excelentes características, bajo coste, reducido consumo,
pequeño tamaño, gran calidad, fiabilidad y abundancia de información, lo
convierten en muy fácil, cómodo y rápido de utilizar.
6
LA CONTROLADORA PICAXE EN TECNOLOGÍA
Microcontroladores PICAXE
Para programar un microcontrolador, es preciso tener conocimientos de
programación en lenguaje C y disponer de un circuito programador para
cargar los programas en el chip, lo cual puede ser un problema para
estudiantes o aficionados a la electrónica, debido a la complejidad del
lenguaje C y a que hay que extraer el microcontrolador del circuito
impreso e insertarlo en un programador cada vez que queramos
reprogramarlo.
El sistema "PICAXE" es un sistema de microcontrolador fácil de
programar que utiliza un lenguaje BASIC muy simple y fácil de aprender
por cualquier persona. El sistema PICAXE explota las características
únicas de la nueva generación de microcontroladores de bajo costo
provistos de memoria FLASH. Estos microcontroladores pueden ser
programados una y otra vez sin la necesidad de un programador PIC.
La ventaja del sistema PICAXE radica en su sencillez. No necesita de
ningún programador, borrador o complejo sistema electrónico. El
microcontrolador es programado (con un simple programa en BASIC o un
diagrama de flujo) mediante un cable conectado al puerto serie del
ordenador. Para montar un circuito basado en un microcontrolador
PICAXE se necesitan muy pocos componentes, el montaje es muy
sencillo y se puede realizar sobre un circuito impreso o sobre una placa
de prototipos (protoboard). Existe varios modelos de microcontroladores
PICAXE (desde 8 hasta 40 pines).
Las características principales del sistema PICAXE son las siguientes:
Bajo costo y fácil construcción
Rápida operación de descarga desde el puerto serie
Software "Editor de Programación" gratuito y de fácil uso
Lenguaje BASIC simple y fácil de aprender
Editor de diagramas de flujo y simulador incluidos
Puede ser programado también mediante el software "Crocodile
Technology"
Extenso número de manuales gratuitos y foro de apoyo en línea
Posibilidad de control remoto mediante infrarrojos
Compatible con servomotores de radiocontrol.
7
LA CONTROLADORA PICAXE EN TECNOLOGÍA
CONSTRUCCIÓN DE UN ENTRENADOR
PICAXE 08 SOBRE CIRCUITO IMPRESO
Características del Picaxe08
El microcontrolador Picaxe08 es el más pequeño de la familia y aunque
tiene poca memoria para almacenar líneas de programa, su simplicidad
permite incluso realizar un entrenador en una placa de prototipos. Las
características de este circuito son las siguientes:
Nº de pines
8
!
Memoria (líneas de Pines
Salidas
programa)
activos
40
5
1-4
Entradas
Memoria
Datos
Interrupciones
1-4
128
-
NOTA:
El pin 3 es de sólo entrada y el pin 0 de sólo salida.
Se puede alimentar el circuito con una tensión comprendida entre 3 y 6 v.
El pin 0 se utiliza para la descarga del programa y como salida. Por este
motivo, es necesario colocar un conmutador o un jumper para seleccionar
la función del pin.
Este circuito puede suministrar unos 25 mA por salida, por lo que sólo se
deben conectar directamente pequeñas cargas (led, altavoz etc...). Para
conectar cargas que consuman corrientes superiores a 25 mA será
necesario intercalar un transistor o circuito similar.
8
LA CONTROLADORA PICAXE EN TECNOLOGÍA
Circuito básico:
1
2
3
Cable de programación:
Esquema mejorado:
Este
esquema
representa el circuito
básico, al que se le han
añadido cuatro LED
para indicar el estado
de las salidas, un
microaltavoz conectado
a la salida 0 y un LED
indicador
de
funcionamiento.
9
LA CONTROLADORA PICAXE EN TECNOLOGÍA
Relación de componentes
Fotolito a escala 1:1
10
LA CONTROLADORA PICAXE EN TECNOLOGÍA
Resultado:
11
LA CONTROLADORA PICAXE EN TECNOLOGÍA
Prueba de la placa:
Para comprobar el correcto funcionamiento del circuito seguimos los siguientes
pasos:
Conectamos la alimentación (5v)
Conectamos el cable de programación a la placa y al ordenador.
Ponemos el interruptor en posición de carga.
Abrimos el editor de programas e indicamos el tipo de chip que estamos
usando (Picaxe 08).
Escribimos uno de los programas de prueba y pulsamos el botón “cargar”.
Cambiamos la posición del conmutador de carga.
1.
Prueba de las salidas:
Este programa prueba las salidas. Es necesario colocar el jumper que habilita los
LED en la posición correcta.
'**********************
'*
prueba led
*
'**********************
prueba: 'nombre del programa
high 0 'enciende LED en pin 0
wait 1 'retardo 1 segundo
high 1 'enciende LED en pin 1
wait 1 'retardo 1 segundo
high 2 'enciende LED en pin 2
wait 1 'retardo 1 segundo
high 4 'enciende LED en pin 4
wait 1 'retardo 1 segundo
2.
Prueba del microaltavoz
Este programa prueba el altavoz conectado a la salida 0. Es necesario colocar el
jumper que habilita el altavoz en la posición correcta.
'**********************
'* prueba sonido *
'**********************
prueba:
'nombre del programa
sound 0, (100,20)
pause 100
sound 0, (110,30)
pause 100
sound 0, (115,40)
pause 100
sound 0, (120,50)
'sonido en la salida 0 de tono 100 y duración 20
'retardo de 100 milisegundos
'sonido en la salida 0 de tono 110 y duración 30
'retardo de 100 milisegundos
'sonido en la salida 0 de tono 115 y duración 50
'retardo de 100 milisegundos
'sonido en la salida 0 de tono 120 y duración 50
goto prueba
'vuelve al principio del programa
3.
Verificación de las entradas
Realizaremos el siguiente programa para verificar el funcionamiento de las entradas
de la placa. En el ejemplo se ha hecho para la entrada 1, pero habrá que repetirlo
para el resto (2, 3 y 4).
12
LA CONTROLADORA PICAXE EN TECNOLOGÍA
Una vez cargado el programa, se conecta un trozo de cable al positivo de la
alimentación y una resistencia de 10k entre la entrada a probar y masa. Para probar
la entrada en cuestión hay que tocar con el extremo del cable al borne de dicha
entrada. Al hacer esto debe cambiar el sonido.
'**************************
'* prueba entrada 1 *
'**************************
prueba:
'nombre del programa
sound 0, (7, 10)
pause 300
'sonido inicial de espera
'retardo 300 milisegundos
if input1 is on then sonido
'Si la entrada 1 está anivel
'alto, se ejecuta la subrutina "sonido"
'vuelve al inicio del programa
goto prueba
sonido:
'subrutina sonido
sound 0, (120, 10)
pause 30
sound 0, (120, 10)
pause 30
sound 0, (120, 10)
pause 30
sound 0, (120, 10)
pause 30
sound 0, (120, 10)
pause 30
'sonido agudo en 0 de duración 10 milisegundos
'retardo 30 milisegundos
'sonido agudo en 0 de duración 10 milisegundos
'retardo 30 milisegundos
'sonido agudo en 0 de duración 10 milisegundos
'retardo 30 milisegundos
'sonido agudo en 0 de duración 10 milisegundos
'retardo 30 milisegundos
'sonido agudo en 0 de duración 10 milisegundos
'retardo 30 milisegundos
goto prueba
'vuelve al inicio del programa
Más programas sencillos:
'**********************
'* led movimiento *
'**********************
b0 = 70
'define la variable b0 y le asigna el valor 70
led:
'nobre del programa
high 0
pause b0
low 0
'enciende LED en pin 0
'retardo b0 milisegundos
'apaga LED en pin 0
high 1
pause b0
low 1
'enciende LED en pin 1
'retardo b0 milisegundos
'apaga LED en pin 0
high 2
pause b0
low 2
'enciende LED en pin 2
'retardo b0 milisegundos
'apaga LED en pin 0
high 4
pause b0
low 4
'enciende LED en pin 4
'retardo b0 milisegundos
'apaga LED en pin 0
goto led
'vuelve al inicio
13
LA CONTROLADORA PICAXE EN TECNOLOGÍA
'*************************
'* led movimiento 2 *
'*************************
b0 = 70
b1 = 100
led:
high 0
pause b0
'enciende LED en pin 0
'retardo b0 milisegundos
high 1
pause b0
'enciende LED en pin 1
'retardo b0 milisegundos
high 2
pause b0
'enciende LED en pin 2
'retardo b0 milisegundos
high 4
pause b0
'enciende LED en pin 4
'retardo b0 milisegundos
low 0
pause b1
'apaga LED en pin 0
'retardo b1 milisegundos
low 1
pause b1
'apaga LED en pin 0
'retardo b1 milisegundos
low 2
pause b1
'apaga LED en pin 0
'retardo b1 milisegundos
low 4
pause b1
'apaga LED en pin 0
'retardo b1 milisegundos
goto led
'vuelve al inicio
14
LA CONTROLADORA PICAXE EN TECNOLOGÍA
'**************************
'* led movimiento 3 *
'**************************
b0 = 70
b1 = 100
'asigna el valor 70 a la variable b0
'asigna el valor 100 a la variable b1
led:
'nombre del programa
high 0
pause b0
high 1
pause b0
high 2
pause b0
high 4
pause b0
'enciende LED en pin 0
'retardo b0 milisegundos
'enciende LED en pin 1
'retardo b0 milisegundos
'enciende LED en pin 2
'retardo b0 milisegundos
'enciende LED en pin 4
'retardo b0 milisegundos
low 0
pause b1
low 1
pause b1
low 2
pause b1
low 4
pause b1
'apaga LED en pin 0
'retardo b1 milisegundos
'apaga LED en pin 0
'retardo b1 milisegundos
'apaga LED en pin 0
'retardo b1 milisegundos
'apaga LED en pin 0
'retardo b1 milisegundos
high 4
pause b0
high 2
pause b0
high 1
pause b0
high 0
pause b0
'enciende LED en pin 0
'retardo b0 milisegundos
'enciende LED en pin 1
'retardo b0 milisegundos
'enciende LED en pin 2
'retardo b0 milisegundos
'enciende LED en pin 4
'retardo b0 milisegundos
low 4
pause b1
low 2
pause b1
low 1
pause b1
low 0
pause b1
'apaga LED en pin 0
'retardo b1 milisegundos
'apaga LED en pin 0
'retardo b1 milisegundos
'apaga LED en pin 0
'retardo b1 milisegundos
'apaga LED en pin 0
'retardo b1 milisegundos
goto led
'vuelve al inicio
15
LA CONTROLADORA PICAXE EN TECNOLOGÍA
CONSTRUCCIÓN DE UN ENTRENADOR PICAXE 18
Características del Picaxe18
El microcontrolador Picaxe18 posee 4 entradas y 8 salidas y tiene una
memoria con capacidad hasta para 600 líneas de programa en la versión
18X. Los modelos 18A y 18X admiten interrupciones y poseen puerto de
infrarrojos. El tipo 18X tiene puerto i2c y salida PWM para el control de la
velocidad de motores. Las características de este circuito son las
siguientes:
Modelo Nº de Memoria
pines
(líneas
de
programa)
A/D
Entradas
Salidas Memoria
Datos
Interrupciones
18
18
40
3
5
8
128
no
18A
18
80
3
5
8
256
si
18X
18
600
3
5
9
256+i2c
si
18
17
16
15
14
13
12
11
10
7
8
9
PICAXE 18
1
2
!
3
4
5
6
19.Entrada 2 (analógica o digital)
20.Salida serie
21.Entrada serie
22.Reset
23.Masa
24.Salida 0
25.Salida 1
26.Salida 2
27.Salida 3
28.Salida 4
29.Salida 5
30.Salida 6
31.Salida 7
32.Alimentación +
33.Entrada 6 (digital)
34.Entrad 7 (digital)
35.Entrada 0 (analógica o digital)
36.Entrada 1 (analógica o digital)
NOTA:
No es preciso resonador externo, pues el chip posee uno interno.
Este circuito puede suministrar unos 25 mA por salida, por lo que sólo se
deben conectar directamente pequeñas cargas (led, altavoz etc...). Para
conectar cargas que consuman corrientes superiores a 25 mA será
necesario intercalar un transistor o circuito similar.
16
LA CONTROLADORA PICAXE EN TECNOLOGÍA
Circuito básico:
Circuito mejorado:
Cable de programación
17
LA CONTROLADORA PICAXE EN TECNOLOGÍA
Relación de componentes:
Ref
D1
D2.....D
9
R1......R
9
R10…..
R15
R16
R17
Descripción
Led verde 3mm Ø
Led rojo 3mm Ø
Resistor 220Ω ¼ w
Resistor 10KΩ ¼ w
Resistor 22KΩ ¼ w
Clemas dobles CI
I2, I3
Condensador 100 μF, 16v
Microcontrolador Picaxe
18, 18A, o 18x
Pulsador araña pequeño
Conmutador CI pequeño o
tiras de 3 pines con
jumpers
3 clemas circuito impreso
triples
3 clemas circuito impreso
dobles
1 microaltavoz
varios
4 separadores latón 10mm
C1, C2
IC1
I1
4 tornillos M3 5mm
8 arandelas M3
1 Conector audio estéreo
3,5 mm hebra
1 zócalo de 18 pines
Fotolito:
18
LA CONTROLADORA PICAXE EN TECNOLOGÍA
Distribución de entradas y salidas:
Resultado:
19
LA CONTROLADORA PICAXE EN TECNOLOGÍA
Verificación del entrenador:
VERIFICACIÓN DEL ALTAVOZ
Para verificar el funcionamiento del altavoz utilizamos el comando sound que genera un
sonido en la salida indicada.
„**********************************************************************************************************
‟*****************************************PRUEBA ALTAVOZ******************************************
„**********************************************************************************************************
Altavoz:
sound 7,(100,300)
pause 200
goto altavoz
„Pone un sonido de tono 100 y 300 ms de duración en la salida 0
„Espera 200 ms
„Vuelve al inicio del programa
VERIFICACIÓN DE LAS SALIDAS
Para comprobar que las salidas funcionan correctamente, realizaremos un programa que
ilumine secuencialmente los led indicadores.
„**********************************************************************************************************
‟*****************************************PRUEBA SALIDAS******************************************
„**********************************************************************************************************
Salidas:
high 0
pause 1000
high 1
pause 1000
high 2
pause 1000
high 3
pause 1000
high 4
pause 1000
high 5
pause 1000
high 6
pause 1000
high 7
„Pone la salida “0” a nivel alto. Se debe iluminar el primer LED
„Espera 1000 ms
„Pone la salida “1” a nivel alto. Se debe iluminar el segundo LED
„Espera 1000 ms
„Pone la salida “2” a nivel alto. Se debe iluminar el tercer LED
„Espera 1000 ms
„Pone la salida “3” a nivel alto. Se debe iluminar el cuarto LED
„Espera 1000 ms
„Pone la salida “4” a nivel alto. Se debe iluminar el quinto LED
„Espera 1000 ms
„Pone la salida “5” a nivel alto. Se debe iluminar el sexto LED
„Espera 1000 ms
„Pone la salida “6” a nivel alto. Se debe iluminar el séptimo LED
„Espera 1000 ms
„Pone la salida “3” a nivel alto. Se debe iluminar el último LED
Se deben ir encendiendo secuencialmente todos los LED, uno cada segundo. Al finalizar el
programa todos los LED han de quedar encendidos.
VERIFICACIÓN DEL RESET
Verificaremos el buen funcionamiento del pulsador RESET accionándolo mientras se ejecuta
un programa anterior. Si funciona bien, deberá reiniciarse el programa.
20
LA CONTROLADORA PICAXE EN TECNOLOGÍA
VERIFICACIÓN DE LAS ENTRADAS
Para comprobar el correcto funcionamiento de las entradas debemos conectar un trozo de
cable al borne (+) del bloque de entradas. Posteriormente grabamos el siguiente programa:
„**********************************************************************************************************
‟*******************************************PRUEBA ENTRADAS**************************************
„**********************************************************************************************************
Entradas:
If input2 is on then indica
goto entradas
„Si la entrada “2” está a nivel alto salta la subrutina “indica”
„Vuelve al inicio del programa
„Nombre de la subrutina
Let pins=%00000001
„Pone simultáneamente todas las salidas a los niveles „indicados
„en el número binario 00000001. Los ceros indican nivel bajo y
„los unos nivel alto. El primer dígito de la combinación
„corresponde a la salida 7
„Espera 100 ms
„Pone las salidas a 00000010
„Espera 100 ms
„Pone las salidas a 00000100
„Espera 100 ms
„Pone las salidas a 00001000
„Espera 100 ms
„Pone las salidas a 00010000
„Espera 100 ms
„Pone las salidas a 00100000
„Espera 100 ms
„Pone las salidas a 01000000
„Espera 100 ms
„Pone las salidas a 10000000
„Espera 100 ms
„Pone las salidas a 00000000
Indica:
pause 100
Let pins=%00000010
pause 100
Let pins=%00000100
pause 100
Let pins=%00001000
pause 100
Let pins=%00010000
pause 100
Let pins=%00100000
pause 100
Let pins=%01000000
pause 100
Let pins=%10000000
pause 100
Let pins=%00000000
Una vez grabado el programa, cuando toquemos con el extremo del cable el borne de la
entrada 2 se deberán encender los LED siguiendo la secuencia programada. Si queremos
repetir el test, deberemos resetear la placa y volver a poner la entrada 2 a nivel alto. Para
comprobar las demás entradas, cambiaremos el 2 de la primera línea del programa por el
número de la entrada a testear, grabaremos el nuevo programa y repetiremos todos los
pasos para las entradas restantes.
21
LA CONTROLADORA PICAXE EN TECNOLOGÍA
COMANDOS BÁSICOS
DEBUG Var
Visualiza la información contenida en la variable Var en la ventana del depurador durante la
ejecución.
Var: variable con un valor previamente cargado
Ejemplo:
inicio:
debug b1
let b1 = b1+1
pause 500
salto inicio
visualiza el valor de b1
incrementa el valor de b1 en una unidad
espera de 0,5 segundos
salta a inicio (bucle)
VARIABLES
El sistema PICAXE da soporte a las siguientes variables:
Words: W0, W1, W2, W3, W4, W5, W6
Bytes: DIRS, PINS (solo PICAXE-08), INFRA, KEYVALUE
B0, B1, B2, B3, B4, B5, B6, B7, B8, B9, B10, B11, B12, B13
Bits: PIN0, PIN1, PIN2, PIN3, PIN4, PIN5, PIN6, PIN7 (conjuntamente igual PINS)
BIT0, BIT1, BIT2, BIT3, BIT4, BIT4, BIT5, BIT6, BIT7 (conjuntamente igual B0)
BIT8, BIT9, BIT10, BIT11, BIT12, BIT13, BIT14, BIT15 (conjuntamente igual B1)
In/Out añade los pseudo nombres:
INPUT0, INPUT1, etc. puede usarse en lugar de PIN0, PIN1, tec.
OUTPUT0, OUTPUT1, etc. puede usarse en lugar de 0, 1, 2, etc.
END
Detiene la ejecución del proceso y entra en modo de bajo consume. Todos los pins de I/O
permanecen en el estado en que se encuentran. END trabaja ejecutando una instrucción SLEEP
continua dentro de un bucle. Un END, STOP ó GOTO deben ser colocados al final de un programa
para evitar pasar del límite de la misma u comience nuevamente.
Ejemplo:
inicio:
let b2 = 15
pause 2000
gosub flash
let b2 = 5
pause 2000
gosub flash
end
„set b2 con valor 15
„espera de 2 segundos
„salta al procedimiento flash
„set b2 con valor 5
„espera de 2 segundos
„salta al procedimiento flash
for b0 = 1 to b2
high 1
pause 500
low 1
pause 500
next b0
return
„define el bucle con el valor b2
„salida 1 a nivel alto
„espera de 0,5 segundos
„salida 1 a nivel bajo
„espera de 0,5 segundos
„fin de bucle
„retorno a linea siguiente de la llamada
flash:
22
LA CONTROLADORA PICAXE EN TECNOLOGÍA
FOR … NEXT
FOR contador = start TO end {STEP {-} inc} {body}
El bucle FOR … NEXT permite a los programas ejecutar un número de declaraciones {body} un
número de veces, usando una variable como contador. Debido a su complejidad y versatilidad, es
mejor describirla paso a paso. El valor de start se asigna a la variable índice: count, que puede ser
una variable de cualquier tipo. Se ejecuta las instrucciones de body. Body es opcional y puede ser
omitido (quizás por un bucle de demora). El valor de inc es sumado a (ó restado si se especifica “-“)
count. Si no se define un valor steep, se incrementa count en una unidad. Si count no pasó end ó
desbordó el tipo de variable, la ejecución vuelve al paso 2. Si el bucle necesita contar más de 255
(count > 255), se debe usar una variable de tamaño Word.
Ejemplo:
bucle:
for b0 = 1 to 20
high 1
pause 500
low 1
pause 500
next b0
pause 2000
goto bucle
„define el bucle con repetición de 1 a 20
„salida 1 a nivel alto
„espera de 0,5 segundos
„salida 1 a nivel bajo
„espera de 0,5 segundos
„fin de bucle
„espera de 2 segundos
„salta a bucle para comienzo de nuevo
GOSUB etiqueta
Salta a la subrutina indicada en etiqueta, guardando su dirección de regreso en la pila (snack). A
diferencia del GOTO, cuando se llega a un RETURN, la ejecución sigue con la declaración siguiente
al último GOSUB ejecutado.
Se puede usar un número ilimitado de subrutinas en un programa y pueden estar anidadas. En otras
palabras, las subrutinas pueden llamar a otra subrutina. Cada anidamiento no debe ser mayor de
cuatro niveles.
Ejemplo:
inicio:
let b2 = 15
pause 2000
gosub flash
let b2 = 5
pause 2000
gosub flash
end
„set b2 con valor 15
„espera de 2 segundos
„salta al procedimiento flash
„set b2 con valor 5
„espera de 2 segundos
„salta al procedimiento flash
for b0 = 1 to b2
high 1
pause 500
low 1
pause 500
next b0
return
„define el bucle con el valor b2
„salida 1 a nivel alto
„espera de 0,5 segundos
„salida 1 a nivel bajo
„espera de 0,5 segundos
„fin de bucle
„retorno a linea siguiente de la llamada
flash:
23
LA CONTROLADORA PICAXE EN TECNOLOGÍA
GOTO etiqueta
La ejecución del programa continúa en la declaración de la etiqueta.
Ejemplo:
inicio:
high 1
„salida 1 a nivel alto
pause 5000
„espera de 5 segundos
low 1
„salida 1 a nivel bajo
pause 5000
„espera de 5 segundos
goto inicio
„salta a inicio
HIGH pin
Pone a nivel alto el pin especificado y lo convierte automáticamente en salida. Pin puede ser una
constante, 0 – 7, ó una variable que contenga un número de 0 – 7 (p. ej. B0) ó un número de pin (p.
ej. PORTA.0)
Ejemplo:
bucle:
high 1
pause 5000
low 1
pause 5000
goto bucle
„pone salida 1 a nivel alto
„espera de 5 segundos
„pone la salida 1 a nivel bajo
„espera de 5 segundos
„salta a comienzo de bucle repetitivo
if…then
if…and…then
if…or…then
IF variable ?? valor {AND/OR variable ?? valor …} THEN etiqueta
Estructura de comparación condicional con salto a una dirección determinada (etiqueta) en caso de
que se cumpla.
??: condicional =, <>, >=, <=, >, <
Variable: valor de la comparación
Valor: variable constante
Etiqueta: dirección del salto en caso de cumplir el condicional
Efectúa una o más comparaciones. Cada término variable puede relacionar un valor con una
constante ú otra variable e incluye uno de los operadores listados anteriormente. IF…THEN evalúa la
comparación en términos de CIERTO o FALSO. Si lo considera cierto, se ejecuta la operación
posterior al THEN. Si lo considera falso, no se ejecuta la operación posterior al THEN. Las
comparaciones que dan 0 se consideran falso. Cualquier otro valor es cierto.
Ejemplo:
inicio:
if pin0 = 1 then flash
„salta a flash si el valor del pin0 es un 1 goto inicio „sino salta a
inicio
high 1
pause 5000
low 1
goto inicio
„pone a valor alto la salida 1
„espera de 5 segundos
„pone a valor bajo la salida 1
„salto a inicio
flash:
24
LA CONTROLADORA PICAXE EN TECNOLOGÍA
INPUT pin
Convierte el Pin especificado en una entrada. Pin debe ser una constante entre 0–7, o una variable
que contenga un número 0-7 (p. ej.: B0) o el nombre de un pin (p. ej.: PORTA.0)
Ejemplo:
inicio:
input 1
reverse 1
reverse 1
output1
configura el pin1 como entrada
configura el pin 1 como salida
configura el pin1 como entrada
configura el pin1 como salida
LOW pin
Coloca el pin especificado en valor bajo y automáticamente lo convierte en salida. Pin puede ser una
variable/constante de 0-7.
Ejemplo:
inicio:
high 1
pause 5000
low 1
pause 5000
goto inicio
pone el pin 1 a nivel alto
espera de 5 segundos
pone el pin 1 a nivel bajo
espera de 5 segundos
salta a inicio del bucle
OUTPUT pin
Convierte el Pin especificado en una salida. Pin debe ser una constante entre 0–7, o una variable
que contenga un número 0-7 (p. ej.: B0) o el nombre de un pin (p. ej.: PORTA.0)
Ejemplo:
inicio:
input 1
reverse 1
reverse 1
output1
configura el pin1 como entrada
configura el pin 1 como salida
configura el pin1 como entrada
configura el pin1 como salida
PAUSE periodo
Detiene el programa por periodo milisegundos. Periodo tiene 16 bits, por lo que los retardos pueden
ser hasta 65635 milisegundos (un poco más de un minuto).
Ejemplo:
inicio:
high 1
pause 5000
low 1
pause 5000
goto inicio
pone el pin 1 a nivel alto
espera de 5 segundos
pone el pin 1 a nivel bajo
espera de 5 segundos
salta a inicio del bucle
25
LA CONTROLADORA PICAXE EN TECNOLOGÍA
READADC canal,variable
El contenido del convertidor A/D (8 bits de resolución) indicado por canal es almacenado en variable.
Canal:variable/constante que especifica el canal (0-3)
Variable: variable donde se almacena el byte leido.
Ejemplo:
inicio:
readadc 1,b1
if b1 > 50 then flash
goto inicio
lee el valor y lo almacena en b1
salta a flash si b1 > 50
sino salta a inicio
high 1
pause 5000
low 1
goto inicio
pone a nivel alto el pin 1
espera de 5 segundos
pone a nivel bajo la salida 1
salto a inicio
flash:
READTEMP pin,variable
READTEMP pin,wordvariable
Lee la temperatura de un DS18B20, sensor digital de temperatura, conectado en pin y almacena su
lectura en variable.
Pin: es el pin de entrada del PICAXE que tiene conectado el sensor.
Variable: donde se almacena el byte leído.
READTEMP: la resolución de la lectura es de enteros de grado, y el sensor funciona de -55 ºC hasta
+125 ºC. El bit 7 indicará si los valores de temperatura son positivos (0) o negativos
(1).READTEMP12: (para programadores avanzados). La temperatura viene expresada con una
resolución de 0,125 ºC y necesita 12 bits para su representación digital. El usuario debe interpretar
los datos a través de cálculo matemático. Ver el dataste del DS18B20 (www.dalsemi.com) para más
información en relación con Data Temperatura.
Ejemplo:
inicio:
readtemp 1,b1
if b1 > 127 then neg
serout, 7, T2400, (#b1)
goto inicio
lee el valor del sensor en pin 1 y lo almacena en b1
chequeo si el valor medido es negativo
transmite el valor al LCD en formato serie
salta a inicio
let b1 = b1 – 128
serout 7,T2400, (“-“)
serout 7,T2400, (#b1)
goto inicio
ajuste del valor negativo en b1
transmite el símbolo negativo
transmite el valor al LCD en formato serie
neg:
RETURN
Vuelve desde una subrutina. Retoma la ejecución en la declaración que sigue al GOSUB que llamó
la subrutina.
Ejemplo:
inicio:
26
LA CONTROLADORA PICAXE EN TECNOLOGÍA
let b2 = 15
pause 2000
gosub flash
let b2 = 5
pause 2000
gosub flash
end
asigna a la variable b2 el valor 15
espera de 2 segundos
llamada a subrutina flash
asigna a la variable b2 el valor 5
espera de 2 segundos
llamada a subrutina flash
for b0 = 1 to b2
high 1
pause 500
low 1
pause 500
next b0
return
define el bucle para el tiempo de b2
pone la salida 1 a nivel alto
espera 0,5 segundos
pone la salida 1 a nivel bajo
espera 0,5 segundos
fin del bucle
vuelve a línea siguiente de llamada
flash:
SERVO pin,pulse
Envía un pulso por el pin indicado para el control de un dispositivo de radio control tipo servo.
Pin: es un pin de salida del PICAXE (0-7).
Pulse: es una variable/constante (75-225) que especifica la posición del servo.
Este comando pone el pin a nivel alto durante un tiempo (x0.01 ms) cada 20ms indicado por pulse.
Generalmente el servo de RC requiere un pulso (0.75 a 2.25ms de duración) cada 20ms. Por
consiguiente el comando servo 1,75 moverá el servo a la posición de 0 grados, con el comando
servo1,225 se posicionará en el extremo opuesto 180 º. Con el comando servo 1,150 colocará el
servo en la posición central. No usar un valor de pulso menor de 75 o mayor de 255, dado que esto
puede causar que el servo funcione incorrectamente. Debido a las tolerancias en la fabricación de
los servos todos los valores son aproximados y requieren un ajuste fino por experimentación.
Ejemplo:
inicio:
servo 4,75
pause 2000
servo 4,150
pause 2000
servo 4,225
pause 2000
goto inicio
mueve el servo a la posición inicial 0 grados
espera 2 segundos
mueve el servo a la posición central
espera 2 segundos
mueve el servo a la posición final 180 grados
espera 2 segundos
salta a inicio y repite ciclo
SOUND pin,(note,duration,note duration)
Genera un tono y/o ruido blanco en el pin especificado. Pin se configura automáticamente como
salida.
Pin: es una variable/constante (0-7) que especifica el pin i/o a utilizar.
Note(s): es una variable o constante (0-255) que especifica la frecuencia del sonido emitido.
Note 0: silencio
Note (1-127): tonos
Note (128-255): ruido blanco
Duration: es una variable/constante (0-255) que determina la duración de la nota, en incrementos de
12 ms.
Los tonos y el ruido blanco están en una escala ascendente (p.e. 1 y 128 son las frecuencias
menores,129 y 266 las mayores). Note 1 es aproximadamente 78,74 Hz y note 127 es
aproximadamente 10000Hz.
SOUND entrega como salida ondas cuadradas con nivel TTL. Gracias a las características del micro
PIC, se puede manejar un altavoz a través de un condensador. El valor del condensador debe ser
27
LA CONTROLADORA PICAXE EN TECNOLOGÍA
determinado en función de las frecuencias a usar y la carga del altavoz. Altavoces piezoeléctricos se
pueden conectar directamente.
Ejemplo:
inicio:
let b0 = b0 + 1 incrementa b0
sound 7,(b0,50)
configura y emite sonido por pin 7
goto inicio
repite programa indefinidamente
WAIT seconds
Pausa de ejecución del código del programa de seconds segundos.
Seconds: es una constante (0-65) que especifica la duración de la pausa en segundos.
Ejemplo:
inicio:
switch on 7
wait 5
switch off 7
wait 5
goto inicio
configura pin 7 como salida a nivel alto
espera 5 segundos
configura pin 7 como salida a nivel bajo
espera 5 segundos
repite programa indefinidamente
28
LA CONTROLADORA PICAXE EN TECNOLOGÍA
AMPLIFICADOR DE SALIDAS ULN2003
Debido a la pequeña potencia que suministran los microcontroladores, sólo podemos hacer
funcionar directamente unos LED y poco más. Por este motivo es necesario amplificar las
salidas en función de las cargas que vayamos a controlar. Un método sencillo y económico
es emplear el integrado ULN2003A, que es un conjunto de Darlington (darlington array)
montados en un chip con el que podemos controlar cargas de hasta medio amperio. El chip
lleva diodos de protección contra las sobretensiones producidas por cargas inductivas. Esto
lo hace ideal para gobernar relés.
1
2
3
4
5
6
7
MASA
Común con la masa de la
alimentación del circuito del que
provienen las señales de entrada
1
2
3
4
5
6
7
SALIDAS
ENTRADAS
1. ESQUEMA DE LA PLACA
ALIMENTACIÓN
CARGAS
(MAX 30V)
Si no queremos fabricar el circuito impreso, podemos montar el circuito en una placa
perforada en tiras. Basta con realizar tres cortes y soldar los cables que unen las pistas del
chip con las pistas de las clemas (debido a que ambas partes tienen distinto paso).
El resultado por la cara del cobre es el siguiente:
29
LA CONTROLADORA PICAXE EN TECNOLOGÍA
2. CARACTERÍSTICAS DEL CHIP ULN2003A
Intensidad por canal =500mA
Tensión máxima de alimentación = 50 v
Protección interna contra sobretensiones producidas por cargas inductivas
Señal mínima de entrada = 2 v
Los pares Darlington pueden colocarse en paralelo para gobernar cargas que consumen intensidades
elevadas, como por ejemplo, pequeños motores.
Precio aproximado = 0.6€
3. CONEXIÓN
Es necesario tener en cuenta que los terminales de salida de este chip conectan las
cargas a masa cuando llega una señal positiva a las entradas adecuadas. Por este
motivo, el terminal de la carga que no está conectado al chip ha de estar unido al borne
positivo del generador. En el esquema de abajo vemos como se conectaría un motor al
canal superior (1, 16). También se puede observar que pueden existir dos
alimentaciones unidas por masa. En este ejemplo, el pulsador es el encargado de dar la
señal de control al pin 1, para que el pin 16 se ponga a 0 voltios y quede conectado el
motor.
4. ESQUEMA INTERNO
Diagrama de un canal
Esquema interno
Esquema externo
30
LA CONTROLADORA PICAXE EN TECNOLOGÍA
PLACA DE CONTROL DE MOTORES
Características de los chips L293B y
L293D
DESCRIPCIÓN
El chip L293 es un driver de 4 canales capaz de proporcionar una corriente
de salida de hasta 1A por canal. Cada canal es controlado por señales de
entrada compatibles TTL y cada pareja de canales dispone de una señal
de habilitación que desconecta las salidas de los mismos.
Dispone de una patilla para la alimentación de las cargas que se están
controlando, de forma que dicha alimentación es independiente de la lógica
de control. Con este circuito integrado se puede controlar el sentido de
giro de hasta dos motores simultáneamente.
CARACTERÍSTICAS DEL CHIP L293D
Intensidad por canal =600mA
Intensidad de pico por canal=1,2 A
Protección contra sobretemperaturas
Protección interna contra sobretensiones producidas por cargas inductivas
Alimentación independiente de las cargas y control
Alta inmunidad al ruido
Tensión de alimentación de las cargas ≤ 36 V
Tensión de alimentación del chip = de 4.5 a 36 V
CARACTERÍSTICAS DEL CHIP L293B
Intensidad por canal = 1A
Intensidad de pico por canal=2 A
Protección contra sobretemperaturas
Sin protección interna contra sobretensiones producidas por cargas inductivas
Alimentación independiente de las cargas y control
Alta inmunidad al ruido
Tensión de alimentación de las cargas ≤ 36 V
Tensión de alimentación del chip = de 4.5 a 36 V
ESQUEMA PARA CONTROLAR DOS MOTORES
31
LA CONTROLADORA PICAXE EN TECNOLOGÍA
FABRICACIÓN DE UN CIRCUITO PARA CONTROLAR DOS
MOTORES
Nos basamos en el esquema visto anteriormente al que hemos añadido
diodos de protección contra sobretensiones producidas por cargas
inductivas. De este modo podemos utilizar el L293B o L293D. En caso de
emplear el modelo D, no será necesario colocar los diodos.
RELACIÓN DE COMPONENTES:
Los elementos necesarios para la fabricación del circuito son los siguientes:
Nº
Descripción
Cantidad
1
L293B o L293D
1
2
Zócalo de 16 pines
1
2
Diodo 1N4148
8
3
Clemas circuito impreso dobles
6
4
Placa circuito impreso
1
FOTOLITO A ESCALA 1:1
DISTRIBUCIÓN DE LOS COMPONENTES
32
LA CONTROLADORA PICAXE EN TECNOLOGÍA
RESULTADO:
ALIMENTACIÓN DEL
CHIP
- +
D
C
A
B
M1
M1
-
+
ALIMENTACIÓN DEL
MOTOR
A
0
1
0
1
B
0
1
1
0
M1
PARO
PARO
IZQUIERDA
DERECHA
C
0
1
0
1
D
0
1
1
0
M2
PARO
PARO
IZQUIERDA
DERECHA
0= nivel bajo (0voltios)
1= nivel alto (>2,3voltios)
33
LA CONTROLADORA PICAXE EN TECNOLOGÍA
EXPERIMENTANDO CON UNA LDR
Introducción
Una LDR es una resistencia dependiente cuyo valor varía en función
de la intensidad de la luz que incide en su superficie activa.
Las LDR están fabricadas a partir de una larga pista material
fotosensible como el sulfuro de cadmio. La resistencia de este
componente puede variar desde unos 10 Ω cuando está expuesta a la
luz solar directa, hasta varios millones en la oscuridad absoluta. Las
aplicaciones de la LDR son múltiples, debiéndose destacar los
interruptores crepusculares, detectores de objetos, medidores de
intensidad luminosa, detectores de humos, etc.
Conexión típica
Resistencia de una LDR en
función de la iluminancia
La resistencia Push Down de 10K, conectada entre la LDR y masa, se
puede eliminar si la placa del microcontrolador la lleva incorporada.
Al igual que en el punto anterior, si nuestra placa posee altavoz,
no será necesario instalarlo.
Montaje
Si queremos utilizar la LDR para medir luz ambiental, no es necesario
utilizar ningún accesorio, pero si queremos medir una luz puntual será
preciso aislar el sensor del ambiente introduciéndolo dentro de un trozo
de tubo opaco. En el caso de emplear la LDR como sensor para un
láser, también habrá que aislar este elemento del ambiente con un
tubo y tapar el extremo con un filtro rojo (se puede usar un trozo de
celofán rojo) para evitar interferencias de la luz ambiental.
34
LA CONTROLADORA PICAXE EN TECNOLOGÍA
Programación
Medida de la intensidad luminosa:
Podemos medir y visualizar el valor de la intensidad luminosa que
recibe la LDR usando los comandos Readadc y Debug:
'*********************************************************
'**********
MEDIDA LUZ *************************
'*********************************************************
'***************CONEXIONES*******************
'LDR AL PIN 1
INICIO:
readadc 1,b0
debug b0
pause 100
goto inicio
'lee la señal analógica de la LDR y carga el „valor en
„variable b0
'transmite el valor b0 a la pantalla del PC
'pausa
'saltar a inicio
Al cargar el programa, aparece inmediatamente en el monitor de
nuestro ordenador una ventana como la que se muestra a la izquierda,
donde se muestra el valor de la variable b0. Exponiendo la LDR a
distintas fuentes de luz se han obtenido los siguientes resultados:
Tipo de luz
Distancia
Medida
5 cm
5 cm
5 cm
5 cm
220
195
200
100
A 5 cm de un tubo fluorescente
Láser de 5 mw a 5 cm
Led blanco 14000 microcandelas
Led rojo 5 mm normal
Interruptor crepuscular:
La señal analógica procedente de la LDR se almacena en la variable
b0 y se compara con un valor de referencia (en este ejemplo 100). Si
b0 es menor que 100 se pone a nivel alto el pin 0 y si es mayor el
programa pone a nivel bajo el pin 0.
'******************************************************
'***** INTERRUPTOR CREPUSCULAR ******
'******************************************************
'***************CONEXIONES**********************
'LDR AL PIN 1
INICIO:
readadc 1,b0
if b0<100 then enciende „si la lectura de la LDR es menor que 100 „salta a
la subrutina ENCIENDE
if b0>100 then apaga
„si la lectura de la LDR es mayor que 100 „salta a
la subrutina APAGA
goto inicio
35
LA CONTROLADORA PICAXE EN TECNOLOGÍA
ENCIENDE:
High 0
goto inicio
APAGA:
Low 0
goto inicio
„pone el pin 0 a nivel alto.
„pone el pin 0 a nivel bajo.
Mediante la señal de salida del pin 0, se puede encender un LED
directamente (esquema 1). Si queremos encender una pequeña
bombilla tenemos intercalar un transistor o un amplificador darlington
ULN2003 (esquema 2). Y si queremos gobernar una bombilla de mucha
potencia habrá que intercalar un relé entre el ULN2003 y la lámpara
(esquema 3).
Esquema 1
Esquema 2
Esquema 3
36
LA CONTROLADORA PICAXE EN TECNOLOGÍA
Barrera láser:
En este caso, la LDR irá dentro de un trozo de tubo opaco que la
proteja de la luz ambiental y sobre su superficie activa incidirá un
láser. Si se interrumpe el rayo láser que incide sobre la LDR, el
programa generará un sonido de alarma.
'*******************************************************
'*************** BARRERA LASER ***************
'*******************************************************
'***************CONEXIONES************************
'LDR AL PIN 1
'ALTAVOZ AL PIN 0
INICIO:
readadc 1,b0
if b0<180 then ALARMA „si la lectura de la LDR es menor que 180 „salta a
la subrutina ALARMA
if b0>180 then PARA
„si la lectura de la LDR es mayor que 180 „salta a
la subrutina PARA
goto inicio
ALARMA:
Sound 0, (120, 10)
goto inicio
PARA:
Low 0
goto inicio
„genera un sonido agudo en el pin 0
„pone el pin 0 a nivel bajo.
Regulador de luz:
El siguiente programa aplicado al esquema 2 de la página anterior,
funciona como un regulador proporcional que incrementa la
intensidad luminosa al reducirse la iluminación ambiental.
'**********************************************************
'************ REGULADOR ***************************
'**********************************************************
'
'*************** CONEXIONES ***********************
'LDR AL PIN 1
„SALIDA: PIN 0
ldr:
readadc 1, b1
if b1>200 then apagaluz
if b1>187 then enciendeluz12
if b1>175 then enciendeluz11
if b1>162 then enciendeluz10
if b1>150 then enciendeluz9
if b1>137 then enciendeluz8
if b1>125 then enciendeluz7
if b1>112 then enciendeluz6
if b1>100 then enciendeluz5
37
LA CONTROLADORA PICAXE EN TECNOLOGÍA
if b1>87
if b1>75
if b1>50
if b1<50
then enciendeluz4
then enciendeluz3
then enciendeluz2
then enciendeluz1
GOTO LDR
enciendeluz1:
high 0
goto ldr
enciendeluz2:
high 0
pause 9
low 0
pause 1
goto ldr
enciendeluz3:
high 0
pause 8
low 0
pause 2
goto ldr
enciendeluz4:
high 0
pause 7
low 0
pause 3
goto ldr
enciendeluz5:
high 0
pause 6
low 0
pause 4
goto ldr
enciendeluz6:
high 0
pause 5
low 0
pause 5
goto ldr
enciendeluz7:
high 0
pause 4
low 0
pause 6
38
LA CONTROLADORA PICAXE EN TECNOLOGÍA
goto ldr
enciendeluz8:
high 0
pause 3
low 0
pause 7
goto ldr
enciendeluz9:
high 0
pause 2
low 0
pause 8
goto ldr
enciendeluz10:
high 0
pause 1
low 0
pause 9
goto ldr
enciendeluz11:
high 0
pause 1
low 0
pause 11
goto ldr
enciendeluz12:
high 0
pause 1
low 0
pause 12
goto ldr
apagaluz:
low 0
goto ldr
39
LA CONTROLADORA PICAXE EN TECNOLOGÍA
Medidor de luz:
Este programa sirve para medir la intensidad luminosa y representar el
valor obtenido mediante ocho LED conectados a las ocho salidas de un
PICAXE18. Los LEDS se irán encendiendo en función de la intensidad
luminosa que incide sobre la LDR.
'**********************************************
'************MEDIDOR DE LUZ*************
'**********************************************
„CONEXIONES:
'LDR A LA ENTRADA 0
MEDIDOR:
readadc 0, b0
if b0>250 then todoslosled
if b0>175 then sieteled
if b0>125 then seisled
if b0>100 then cincoled
if b0>75 then cuatroled
if b0>50 then tresled
if b0>25 then dosled
if b0>10 then unled
if b0<10 then ceroled
goto medidor
TODOSLOSLED:
let pins= %11111111
goto medidor
SIETELED:
let pins= %01111111
goto medidor
40
LA CONTROLADORA PICAXE EN TECNOLOGÍA
SEISLED:
let pins= %00111111
goto medidor
CINCOLED:
let pins= %00011111
goto medidor
CUATROLED:
let pins= %00001111
goto medidor
TRESLED:
let pins= %00000111
goto medidor
DOSLED:
let pins= %00000011
goto medidor
UNLED:
let pins= %00000001
goto medidor
CEROLED:
let pins= %00000000
goto medidor
41
LA CONTROLADORA PICAXE EN TECNOLOGÍA
EXPERIMENTANDO CON UNA NTC
Introducción
Las NTC y PTC son resistencias cuyo valor varía con la temperatura. Si al
aumentar la temperatura aumenta la resistencia se denomina PTC, y si al
contrario, un aumento de temperatura origina una disminución de la
resistencia se denomina NTC. Se usan para termostatos, termómetros,
sistemas de protección contra sobretemperaturas, etc.
Conexión típica
Resistencia de una NTC en función
de la temperatura
La resistencia Push Down de 10K, conectada entre la LDR y masa, se puede
eliminar si la placa del microcontrolador la lleva incorporada.
Programación
Medida de la temperatura:
Podemos medir y visualizar el valor de la temperatura a la que se halla
la NTC usando los comandos Readadc y Debug:
Símbolo
'*********************************************************
'**********
MEDIDA DE Tª ***********************
'*********************************************************
'***************CONEXIONES*******************
'NTC AL PIN 1
42
LA CONTROLADORA PICAXE EN TECNOLOGÍA
INICIO:
readadc 1,b0 'lee la señal analógica de la LDR y carga el „valor en
„variable b0
debug b0
'transmite el valor b0 a la pantalla del PC
pause 100
'pausa
goto inicio
'saltar a inicio
Al cargar el programa, aparece inmediatamente en el monitor de
nuestro ordenador una ventana como la que se muestra a la
izquierda, donde se muestra el valor de la variable b0. Si
modificamos la temperatura de la NTC veremos como varía la
lectura que nos da el ordenador:
Temperatura *
0º
9º
22º
36º
60º
82º
Medida
100
105
115
123
149
171
*Para una NTC de 1500Ω a 25ºC (marrón, verde, rojo)
Alarma de temperatura:
La señal analógica procedente de la NTC se almacena en la
variable b0 y se compara con un valor de referencia (en este
ejemplo 140). Si b0 supera el valor 140 el programa genera un
sonido de alarma:
'******************************************************
'******* ALARMA TEMPERATURA
********
'******************************************************
'***************CONEXIONES**********************
'NTC AL PIN 1
INICIO:
readadc 1,b0
if b0<140 then alarma
„si la lectura de la NTC es superior a 140
„salta a la subrutina ALARMA
goto inicio
ALARMA:
sound 1 (120,10)
pause 100
goto inicio
43
LA CONTROLADORA PICAXE EN TECNOLOGÍA
CONSTRUCCIÓN MICRORROBOT
CONTROLADO POR PICAXE
CARACTERÍSTICAS
Se trata de un microrrobot capaz de moverse aleatoriamente
esquivando obstáculos, seguir líneas oscuras dibujadas sobre fondo
blanco y moverse hacia un foco de luz o alejarse del mismo.
ESTRUCTURA
La estructura del microrrobot va a ser una placa de aluminio de de 2
mm de espesor. Se ha elegido este material debido a su ligereza, la
facilidad de mecanizado y por ser un material fácil de conseguir.
Con respecto a la forma, ésta puede ser cualquiera, siempre y cuando
se puedan acoplar las tres ruedas (dos motrices y una loca) formando
un triángulo equilátero. El tamaño será algo mayor del mínimo
necesario para no tener problemas en el caso de realizar alguna
modificación sobre lo inicialmente previsto.
Como forma, teniendo en cuenta el tamaño y posición de los distintos
elementos que irán acoplados a la base, se ha elegido una foto de un
trilobites para darle un aspecto atractivo.
El diseño de esta base se ha realizado con un programa de CAD y se
han incluido más taladros de los necesarios para no tener problemas
a la hora de incluir nuevos elementos.
Sobre esta base irán colocados dos motores con sus ruedas, la rueda
trasera loca, la batería, los sensores, el regulador de tensión y los
soportes que nos permitirán colocar una segunda plataforma que
servirá de soporte para la circuitería.
La plataforma superior será de metacrilato de 3 mm de espesor, se
fijará a la base mediante 5 separadores de latón y alojará los
circuitos, el interruptor general, algunos indicadores luminosos y los
orificios necesarios para el paso de los cables.
Por último, para proteger las partes más sensibles, se colocará una
tercera lámina de metacrilato, montada sobre separadores.
44
LA CONTROLADORA PICAXE EN TECNOLOGÍA
ENERGÍA
Como fuente energética se ha elegido una batería de níquel-metal hidruro
de 6 elementos, con una capacidad de 650 mAh a 7,4 voltios. Del cable de
este elemento se ha sacado una derivación para dejar libre el terminal de
salida y no tener que desconectar el dispositivo para proceder a su
recarga.
Como los motores y la circuitería funcionan a 5 voltios, es preciso colocar
después del interruptor general un regulador de tensión 7805 para obtener
una tensión de 5 voltios estabilizada. Además, este circuito integrado tiene
protección contra sobrecargas y cortocircuitos, por lo que
evitará
problemas y averías al resto del sistema. Este elemento irá atornillado a la
base de aluminio de modo que ésta haga la función de disipador. Si no
conectamos eléctricamente nada a la base, no será preciso colocar una
lámina aislante entre el regulador y la base.
A continuación se muestra el circuito de alimentación y un resumen de las
características del regulador de tensión 7805:
t
CARACTERÍSTICAS BÁSICAS
TERMINALES
Corriente de salida superior a 1 A
Protección contra sobrecalentamiento
Protección contra cortocircuitos
CONEXIÓN
SALIDA
5V
7805
C2
0.1µF
C1 es necesario si el regulador se encuentra muy alejado de
la fuente de alimentación.
C2 sirve para mejorar la estabilidad
Vs a
Ma
sa
lida
Ve
ntr a
C1
0.33µF
da
ENTRADA
(de 7 a 35V)
45
LA CONTROLADORA PICAXE EN TECNOLOGÍA
MOTORES
Existen en el mercado muchos tipos de pequeños motores
eléctricos con reductora que podrían servir para nuestro robot. A
la hora de seleccionar uno tenemos que tener en cuenta lo
siguiente:
Que gire a una velocidad moderada o lenta.
Que el consumo, el tamaño y el peso sean pequeños.
Que no produzca muchas interferencias.
Que sea económico.
Teniendo en cuenta lo dicho anteriormente, se ha optado por una
pareja de servomotores de radiocontrol que aunque no pueden
girar de forma continua, pueden ser modificados para funcionar
como cualquier otro motor. La ventaja de estos motores es su
elevada calidad, precio moderado (unos 10 €), buen par, poco
peso (35 g) y velocidad adecuada para nuestro diseño.
Los pasos a seguir para modificar un servomotor Futaba 3003
son los siguientes:
1.
Retiramos la cruceta del eje, los cuatro tornillos de la base
y desmontamos el servomotor.
2.
Desoldamos el motor y separamos el controlador (circuito
impreso). Esta parte ya no nos hará falta.
3.
Extraemos el eje secundario y con cuidado, limamos el
tope que impide el giro completo.
4.
Soldamos los cables rojo y negro al motor, teniendo en
cuenta las referencias de color (punto rojo para el cable rojo) lo
colocamos en su sitio y volvemos a montar todas las piezas.
Como rueda, se ha empleado un disco de metacrilato de 40 mm
de diámetro y 3mm de espesor pegado a la cruceta. Para que el
robot no patine, se ha practicado una ranura al disco y se ha
encajado un anillo tórico.
46
LA CONTROLADORA PICAXE EN TECNOLOGÍA
Como estos motores absorben una intensidad relativamente alta,
no se pueden conectar directamente al microcontrolador, que sólo
puede suministrar unos 25 mA. Por este motivo, habrá que
intercalar entre el microcontrolador y los motores un elemento
que se encargue de suministrar a los motores la intensidad y
polaridad adecuada en función de las señales que recibe del
microcontrolador. Este elemento es el circuito integrado L293D
que permite gobernar dos motores mediante cuatro entradas de
control AB para el motor 1 y CD para el motor 2. Estas entradas
las conectaremos a cuatro salidas del microcontrolador.
Para evitar las interferencias que pueden
producir las escobillas de los motores
eléctricos, es necesario colocar un
condensador de 0,1 µF en paralelo con los
bornes del motor para que actúe a modo
de filtro.
La fijación de los motores a la base se
puede
hacer mediante escuadras,
adhesivo o bridas. En este caso hemos
fabricado un par de escuadras de aluminio
y las hemos fijado a la base y al motor
mediante tornillos M3.
El aspecto de la primera capa del robot se
puede ver a la izquierda.
47
LA CONTROLADORA PICAXE EN TECNOLOGÍA
CEREBRO
El cerebro de la máquina es un microcontrolador Picaxe 18x. Se ha
elegido este circuito por disponer de suficientes entradas y salidas y
por admitir programas de hasta 600 líneas aproximadamente.
Características del Picaxe18
El microcontrolador Picaxe18 posee 4 entradas y 8 salidas y tiene una
memoria con capacidad de hasta 600 líneas de programa en la versión
18X. Los modelos 18A y 18X admiten interrupciones y poseen puerto
de infrarrojos. El tipo 18X tiene puerto i2c y salida PWM para el control
de la velocidad de motores. Las características de este circuito
integrado son las siguientes:
Modelo Nº de Memoria
pines
(líneas
de
programa)
A/D
Entradas
Salidas Memoria
Datos
Interrupciones
18
18
40
3
5
8
128
no
18A
18
80
3
5
8
256
si
18X
18
600
3
5
9
256+i2c
si
Distribución de terminales
18
17
16
15
14
13
12
11
10
7
8
9
PICAXE 18
1
2
3
4
5
6
1. Entrada 2 (analógica o digital)
2. Salida serie
3. Entrada serie
4. Reset
5. Masa
6. Salida 0
7. Salida 1
8. Salida 2
9. Salida 3
10.Salida 4
11.Salida 5
12.Salida 6
13.Salida 7
14.Alimentación +
15.Entrada 6 (digital)
16.Entrad 7 (digital)
17.Entrada 0 (analógica o digital)
18.Entrada 1 (analógica o digital)
48
LA CONTROLADORA PICAXE EN TECNOLOGÍA
Placa de control:
El esquema de abajo corresponde a la controladora del robot basada
en el microcontrolador picaxe18. Además de los elementos
imprescindibles, se ha incluido en el circuito: led, indicadores de
salida, un microaltavoz para facilitar la programación y resistencias
Push down que ponen las entradas a nivel bajo en ausencia de señal.
SENSORES
Para adquirir información de su entorno, el robot utilizará tres tipos de
sensores:
Microrruptores finales de carrera.
Sirven para detectar obstáculos por contacto. Para ampliar su radio de
acción se han soldado unas antenas de unos 15 cm de alambre de
acero. En el esquema de abajo se muestra el modo de conectar este
dispositivo. La resistencia de 10 K es una resistencia “push down” que
sirve para poner la salida a nivel bajo cuando el contacto está abierto. Si
colocamos esta resistencia en la placa del microcontrolador, no es
necesario ponerla a la salida del final de carrera. Las “antenas” de los
microrruptores irán cruzadas para que no quede ningún ángulo muerto
en la zona central.
49
LA CONTROLADORA PICAXE EN TECNOLOGÍA
Dispositivo óptico emisor/receptor CNY70
Constan de un emisor de infrarrojos y un fototransistor y
detectan objetos de distinto color (por reflexión de infrarrojos) a
pequeñas distancias, generalmente inferiores a un centímetro.
Si se coloca delante de este sensor un objeto de color claro, la
radiación infrarroja emitida por el fotodiodo, se reflejará e incidirá
sobre el fototransistor haciendo que éste conduzca.
Aunque estos sensores producen una señal analógica,
proporcional a la radiación infrarroja que incide sobre el
fototransistor, en este caso los utilizaremos como sensores
digitales. El microcontrolador Picaxe, considera que una entrada
digital está a nivel alto cuando su tensión supera los 2,5 voltios.
Estos sensores los emplearemos para que el robot pueda seguir
una línea negra pintada sobre fondo blanco. Para ello,
colocaremos tres sensores alineados y separados unos 10 mm.
De este modo, cuando el sensor central detecte color negro el
robot se moverá hacia delante. Si el sensor izquierdo detecta
negro y los otros no, nos estamos desviando hacia la izquierda y
habrá que actuar en consecuencia y si es el sensor derecho el
único que detecta negro, la desviación es hacia la izquierda.
Como en el caso anterior, es necesario colocar una resistencia
“push down” de 10k para tener nivel bajo a la salida cuando no
conduce el fototransistor.
El esquema de conexionado se muestra a continuación.
Si necesitamos que estos sensores tengan un mayor alcance
podemos cambiar las resistencias limitadoras de 220 Ω por otras
de 100 Ω.
50
LA CONTROLADORA PICAXE EN TECNOLOGÍA
LDR
Mediante estas resistencias podemos obtener una señal analógica
proporcional a la cantidad de luz que incide sobre su superficie
activa. La variación de la resistencia en estos sensores es muy
drástica y suele oscilar entre varios megaohmios cuando no incide
luz sobre su superficie activa a unos 10 ohmios cuando está
expuesta a una elevada iluminación.
Nuestro prototipo dispondrá de dos LDR colocadas en el frontal,
mirando hacia delante y formando un ángulo de unos 120 grados.
La finalidad de estos sensores es producir una señal analógica
proporcional a la iluminación que reciben. El microcontrolador
compara estas señales y actúa sobre los motores para que el robot
se mueva hacia la zona más iluminada o a la zona más oscura,
según programemos.
CONEXIONES
La forma de de conectar los elementos vistos anteriormente es la
siguiente:
Motores
La placa de control de motores se conectará a las cuatro primeras
salidas del microcontrolador (A, B, C y D con las salidas 0,1,2,3) y
los terminales de alimentación se unirán a la salida del regulador
de tensión (5v), respetando la polaridad.
Sensores CNY50
Los sensores CNY70 se alimentan a 5V, por lo que han de
conectarse al circuito de alimentación. Las salidas obtenidas de los
sensores derecho, central e izquierdo irán conectadas a las
entradas 1, 0 y 2.
Antenas (microrruptores)
Irán conectados a la entrada 7 el derecho y a la entrada 6 el
izquierdo. Si tienen tres terminales hay que tener la precaución de
conectar al microcontrolador las patillas correspondientes al
contacto normalmente abierto (NO). El común irá al positivo de la
alimentación (+5v). Además de para detectar obstáculos, las
antenas nos servirán para seleccionar el programa que queramos
ejecutar.
51
LA CONTROLADORA PICAXE EN TECNOLOGÍA
ENTRADAS
MICROCONTROLADOR
Sensores LDR
Estos sensores han de ir conectados a dos de las tres entradas
entradas analógicas/digitales del microcontrolador (0 y 1).
Como sólo disponemos de 5 entradas y tenemos 7 elementos que
conectar, las dos LDR han de compartir entrada con dos CNY70.
Mediante una matriz de cuatro de microrruptores seleccionaremos
el par de sensores que queremos conectar a las dos entradas
analógicas (0 y 19)
1
2
3
4
ON
1
2
3
4
ON
Según la combinación en el selector, conectaremos a las entradas
0 y 1 la LDR o los sensores CNY70 central y derecho atendiendo al
siguiente esquema:
CNY70 central y derecho conectados
a las entradas 0 y 1
LDR izquierda y derecha conectadas
a las entradas 0 y 1
INDICADORES LUMINOSOS
Los indicadores luminosos (LED) se conectarán a las salidas 4 y 5.
Cada indicador está formado por dos LED. Uno se halla en las
antenas superiores o cuernos y el otro en la parte trasera del
prototipo.
ALTAVOZ
Se trata de un microaltavoz piezoeléctrico. Va montado en la placa
de control y conectado a la salida 7
52
LA CONTROLADORA PICAXE EN TECNOLOGÍA
ESQUEMA GENERAL
53
LA CONTROLADORA PICAXE EN TECNOLOGÍA
SOFTWARE
El diseño del software es la parte más apasionante del proyecto. Un
software bien planteado puede mejorar enormemente la calidad del
resultado. El modo de proceder es realizar pequeños programas,
probarlos y una vez tengamos todos los bloques necesarios, agruparlos en
un único programa.
Conexiones:
Para facilitar la programación, tenemos que tener a mano un esquema
con las conexiones que hemos realizado previamente. En este caso las
conexiones realizadas a las entradas y salidas del microcontrolador son
las siguientes:
ENTRADAS:
7
6
7
1
0
2
Microrruptor Izquierdo (Antena derecha)
Microrruptor Derecho (Antena derecha)
Microrruptor Izquierdo (Antena derecha)
CNY70 Derecho/LDR Derecha (Entrada analógica)
CNY70 Central /LDR Izquierda (Entrada analógica)
CNY70 Izquierdo
SALIDAS:
0y1
2y3
4
5
Entradas AB del L293 (Control del motor derecho)
Entradas CD del L293 (Control del motor izquierdo)
Indicadores luminosos (Cuernos)
Luz trasera
Programas para comprobación de los motores.
Para comprobar el correcto funcionamiento de los motores usaremos los
siguientes programas:
Movimiento hacia delante:
Adelante:
high 0
low 1
„pone la salida 0 a nivel alto
„pone la salida 1 a nivel bajo
high 2
low 3
„pone la salida 2 a nivel alto
„pone la salida 3 a nivel bajo
Como las salidas 0 y 1 están conectadas a las entradas A y B del L293,
éstas gobernarán el motor derecho. Las salidas 2 y 3 controlan el motor
izquierdo. Este programa hace girar indefinidamente los dos motores. Si
no giran en el mismo sentido habrá que invertir las conexiones de uno
de ellos. Si ambos motores giran hacia atrás, haremos el siguiente
cambio:
54
LA CONTROLADORA PICAXE EN TECNOLOGÍA
Adelante:
low 0
high 1
„pone la salida 0 a nivel bajo
„pone la salida 1 a nivel alto
low 2
high 3
„pone la salida 2 a nivel bajo
„pone la salida 3 a nivel alto
Giro a la derecha parando un motor:
Giraderecha:
low 0
„pone la salida 0 a nivel bajo
low 1
„pone la salida 1 a nivel bajo
high 2
low 3
„pone la salida 2 a nivel alto
„pone la salida 3 a nivel bajo
Las dos primeras líneas hacen que se detenga el motor derecho y las
dos siguientes hacen que el izquierdo gire hacia delante. De este modo
se consigue que el robot gire a la derecha.
Giro a la izquierda invirtiendo el sentido de marcha de un motor:
Giraizquierda:
low 0
high 1
„pone la salida 0 a nivel bajo
„pone la salida 1 a nivel alto
high 2
low 3
„pone la salida 3 a nivel alto
„pone la salida 2 a nivel bajo
En este caso, el motor derecho, controlado por las dos primeras líneas,
gira hacia delante mientras que el izquierdo gira hacia atrás. De esta
forma se consigue un giro más cerrado que deteniendo uno de los
motores.
Movimiento hacia delante durante un tiempo:
Adelante:
low 0
high 1
„pone la salida 0 a nivel bajo
„pone la salida 1 a nivel alto
low 2
high 3
„pone la salida 2 a nivel bajo
„pone la salida 3 a nivel alto
wait 10
„pausa de segundos
low 0
„pone la salida 0 a nivel bajo
low 1
„pone la salida 1 a nivel bajo
55
LA CONTROLADORA PICAXE EN TECNOLOGÍA
low 2
low 3
„pone la salida 2 a nivel bajo
„pone la salida 3 a nivel bajo
Las primeras cuatro líneas de programa hacen que los dos motores
giren a derechas. La siguiente línea detiene el programa 10 segundos
(los dos motores siguen girando durante este tiempo). Las siguientes
líneas ordenan la detención de los dos motores y el programa concluye.
Bucle:
vaiven:
low 0
high 1
low 2
high 3
„pone la salida 0 a nivel bajo
„pone la salida 1 a nivel alto
„pone la salida 2 a nivel bajo
„pone la salida 3 a nivel alto
wait 10
„pausa de segundos
high 0
low 1
high 2
low 3
„pone la salida 0 a nivel alto
„pone la salida 1 a nivel bajo
„pone la salida 2 a nivel alto
„pone la salida 3 a nivel bajo
wait 5 „pausa de segundos
goto vaiven
Este programa comienza con los dos motores girando a derechas
durante 10 segundos. Transcurrido ese tiempo, los motores invierten su
marcha durante otros 10 segundos y la última línea del programa hace
que volvamos al inicio, de modo que el programa se estará repitiendo
indefinidamente.
Programas básicos de entrenamiento:
Primer programa: cuadrado
Una trayectoria cuadrada se compone de cuatro trayectorias rectas
iguales y cuatro giros de noventa grados. Para poder programar con
precisión, es necesario conocer de antemano la velocidad a la que se
mueve el prototipo. Para ello, basta con cronometrar el tiempo que tarda
en recorrer un metro y el tiempo necesario para completar un giro de
360º con un motor parado. En este caso hemos obtenido los siguientes
datos:
Tipo de movimiento
Línea recta
Giro
Cantidad
1m
360º
Tiempo
15 s
10 s
A partir de estos datos, podemos crear un programa que haga que el
movimiento del robot describa un cuadrado perfecto del tamaño que
56
LA CONTROLADORA PICAXE EN TECNOLOGÍA
queramos. El programa siguiente define una trayectoria cuadrada de 40
cm de lado. Para ello se ha tenido en cuenta, además de los tiempos la
distancia entre ejes que es de 10 cm.
cuadrado:
high 0
low 1
high 2
low 3
Trayectoria recta durante 3 s (20 cm)
wait 3
high 0
low 1
low 2
low 3
Giro durante 2,5 s con un motor parado (
90º y 10 cm)
pause 2500
goto cuadrado
Variación de la velocidad:
Una manera muy interesante de reducir la velocidad de un motor de una
forma precisa, sin perder mucho par y sin tener que modificar la tensión
que llega a los motores, es la modulación por ancho de pulso (PWM).
Esta técnica consiste alimentar a los motores de forma intermitente
mediante un tren de ondas rectangulares similares a los mostrados a
continuación:
V
Vmedia
t
En este caso, los impulsos de tensión duran lo mismo que los tiempos
de reposo por lo que la tensión media es la mitad y por tanto, el motor
girará también a la mitad de la velocidad que tendría si le llegase el cien
por cien de tensión.
Si queremos reducir más aún la velocidad tenemos que reducir la
duración de los impulso y hacer mayor el tiempo de reposo.
La regulación de velocidad PWM requiere que la frecuencia de los
pulsos enviados al motor ronde los 10 Kilohercios y el uso de motores
de buena calidad.
A continuación se muestra un ejemplo de regulación PWM:
57
LA CONTROLADORA PICAXE EN TECNOLOGÍA
pwm1:
high 0
low 1
high 2
low 3
Los dos motores en marcha durante
1 milisegundo
pause 1
low 0
low 1
low 2
low 3
Los dos motores en reposo durante
1 milisegundo
pause 1
goto pwm1
Círculo:
Aplicando una regulación PWM a uno de los motores, podemos hacer
que nuestro prototipo siga una trayectoria circular. El tamaño del círculo
dependerá de la relación entre el tiempo que está parado y girando el
motor que gira de forma discontinua.
circulo3:
high 0
low 1
high 2
low 3
pause 2
Los dos motores giran en el mismo
sentido durante 2 milisegundos
high 0
low 1
low 2
low 3
pause 1
El motor 1 gira y el motor 2 se detiene
durante 1 milisegundo
goto circulo3
En este programa, el motor 2 está 2 milisegundos girando y un
milisegundo en reposo, de modo que su velocidad media se reduce a
unos dos tercios.
Programa LIBRE
Permite que el robot se mueva en línea recta y cuando detecta un
obstáculo con sus antenas ejecuta un movimiento evasivo y continúa su
marcha. Como se trata de un programa algo más complejo, es
conveniente añadir toda la información que creamos oportuno por si
58
LA CONTROLADORA PICAXE EN TECNOLOGÍA
tenemos que modificar el programa o por si aparecen errores. Esta
información se escribe detrás de una comilla „(tecla ?) para que el
programa no la considere como código. Una información importante a
indicar son las conexiones realizadas. El código del programa es el
siguiente:
'**********************************************************************************
'**********************************************************************************
'***********************
LIBRE
**********************************
'**********************************************************************************
'**********************************************************************************
'***********************
'
'
'
'
'
'
'
'
'
'
'
'
'
Nombre del programa principal
Llama a la subrutina saludo
Programa que escanea las
entradas a las que están
conectadas las antenas y según
su estado actúa en
consecuencia llamando a otras
rutinas palante:
CONEXIONES
*****************************
CONEXIONES
ENTRADAS:
BUMPER IZDO
BUMPER DER
ENTRADA 7
ENTRADA 6
SALIDAS:
MOTOR DERECHO
MOTOR IZQUIERDO
CUERNOS
LUZ TRASERA
SALIDAS 0 Y 1
SALIDAS 2 Y 3
SALIDA 4
SALIDA 5
LIBRE:
gosub saludo
estadoantenas:
if input7 is off and input6 is off then palante
if input7 is on then atrasder
if input6 is on then atrasizq
high 0
low 1
Esta rutina hace que los dos
motores giren hacia delante
high 2
low 3
Vuelve a escanear el estado de
las antenas
goto estadoantenas
59
LA CONTROLADORA PICAXE EN TECNOLOGÍA
atrasder:
high 5
low 0
low 1
low 2
low 3
Este programa hace
que el robot se mueva
hacia atrás tres
segundos y después
gire a la derecha unos
180 grados
high 4
pause 100
low 4
pause 100
high 4
pause 100
low 4
Luz trasera encendida
Paran los dos motores
Parpadean los led de los
cuernos
Sonido de aviso de colisión
sound 7, (125,1,150,2,125,1,150,2,125,1,150,2,125,1,150,2,125,1,150,2)
high 1
low 0
high 3
low 2
Los dos motores invierten su
marcha durante 3 segundos
wait 3
low 5
high 0
low 1
Este programa hace
que el robot se mueva
hacia atrás tres
segundos y después
gire a la izquierda
unos 180 grados. Sólo
se diferencia del
programa anterior en
el sentido del último
giro
high 3
low 2
Luz trasera apagada
El motor derecho gira hacia
delante mientras el izquierdo
invierte su marca durante dos
segundos durante 3 segundos
wait 2
goto estadoantenas
atrasizq:
Vuelve al inicio del programa principal
para volver a escanear el estado de las
antenas
high 5
low 0
low 1
low 2
low 3
high 4
pause 100
low 4
pause 100
high 4
pause 100
low 4
sound 7, (125,1,150,2,125,1,150,2,125,1,150,2,125,1,150,2,125,1,150,2)
high 1
low 0
high 3
60
LA CONTROLADORA PICAXE EN TECNOLOGÍA
low 2
wait 3
low 5
high 1
low 0
high 2
low 3
wait 2
goto estadoantenas
Programa SIGUELÍNEAS
Este programa hace que el robot siga una línea negra dibujada sobre un
fondo blanco. Para ello, utiliza tres sensores CNY70 que dan salida 0
cuando tienen delante una superficie oscura.
'*********************************************************************************
'***********************
SIGUELINEAS
****************************
'*********************************************************************************
'
'
'
'
'
'
'
'
'
'
'
'
'
'
CONEXIONES
ENTRADAS:
CNY70 DER / LDR DER
ENTRADA 1
CNY70 CEN / LDR IZQ ENTRADA 0
CNY70 IZQ
ENTRADA 2
SALIDAS:
MOTOR DERECHO
MOTOR IZQUIERDO
CUERNOS
LUZ TRASERA
SALIDAS 0 Y 1
SALIDAS 2 Y 3
SALIDA 4
SALIDA 5
SIGUELINEAS:
high 5
if input2 is off then giraizquierda
if input1 is off then giraderecha
if input0 is off and input2 is on and input1 is on then adelante
if input0 is off and input2 is off and input1 is off then giraderecha
goto siguelineas
giraizquierda:
high 0
low 1
low 2
low 3
goto siguelineas
61
LA CONTROLADORA PICAXE EN TECNOLOGÍA
giraderecha:
high 2
low 3
low 0
low 1
goto siguelineas
adelante:
high 0
low 1
high 2
low 3
goto siguelineas
Programa LDR
Se basa en comparar los valores analógicos que aportan dos sensores
LDR colocados en el frontal del robot.
'**********************************************************************************
'***********************
LDR
***********************************
'**********************************************************************************
'
'
'
'
'
'
'
'
'
'
'
'
'
'
'
'
CONEXIONES
ENTRADAS:
BUMPER IZDO
ENTRADA 7
BUMPER DER
ENTRADA 6
CNY70 DER / LDR DER
ENTRADA 1
CNY70 CEN / LDR IZQ ENTRADA 0
CNY70 IZQ
ENTRADA 2
SALIDAS:
MOTOR DERECHO
MOTOR IZQUIERDO
CUERNOS
LUZ TRASERA
SALIDAS 0 Y 1
SALIDAS 2 Y 3
SALIDA 4
SALIDA 5
LDR:
if input7 is off and input6 is off then SIGUELUZ
if input7 is on then atrasderecha
if input6 is on then atrasizquierda
atrasderecha:
low 0
low 1
low 2
low 3
high 4
pause 100
62
LA CONTROLADORA PICAXE EN TECNOLOGÍA
low 4
pause 100
high 4
pause 100
low 4
sound 7, (125,1,150,2,125,1,150,2,125,1,150,2,125,1,150,2,125,1,150,2)
high 1
low 0
high 3
low 2
wait 2
high 0
low 1
high 3
low 2
WAIT 2
goto LDR
atrasizquierda:
low 0
low 1
low 2
low 3
high 4
pause 100
low 4
pause 100
high 4
pause 100
low 4
sound 7, (125,1,150,2,125,1,150,2,125,1,150,2,125,1,150,2,125,1,150,2)
high 1
low 0
high 3
low 2
wait 2
high 1
low 0
high 2
low 3
WAIT 2
goto LDR
SIGUELUZ:
63
LA CONTROLADORA PICAXE EN TECNOLOGÍA
readadc 0,b0 'ldr izquierda
readadc 1,b1 'ldr derecha
if b0 > b1 then izquierda
if b0 < b1 then derecha
if b0 = b1 then haciadelante
goto LDR
izquierda:
high 0
low 1
low 2
low 3
goto ldr
derecha:
high 2
low 3
low 0
low 1
goto ldr
haciadelante:
high 0
low 1
high 2
low 3
goto ldr
Selector de programas
'**********************************************************************************
'*********************** SELECCION DE PROGRAMA **********************
'**********************************************************************************
SELECCIONPROGRAMA:
'LOS DOS CUERNOS PULSADOS AL INICIO
'EL CUERNO IZQUIERDO PULSADO AL INICIO
'NINGUN CUERNO PULDADO AL INICIO
SIGUELINEAS
LDR
LIBRE
sound 7, (105,10)
pause 100
sound 7, (105,10)
pause 100
sound 7, (105,10)
pause 100
sound 7, (105,10)
pause 100
sound 7, (105,10)
pause 100
sound 7, (105,100)
if input7 is on and input6 is on then SIGUELINEAS
if input7 is on and input6 is off then LDR
if input7 is off and input6 is off then LIBRE
64
LA CONTROLADORA PICAXE EN TECNOLOGÍA
SALUDO:
high 4
high 5
pause 100
low 4
low 5
pause 100
high 4
high 5
pause 100
low 4
low 5
pause 100
high 4
high 5
pause 100
low 4
low 5
pause 100
high 4
high 5
pause 100
low 4
low 5
pause 100
sound 7, (125,1,150,2,125,1,150,2,125,1,150,2,125,1,150,2,125,1,150,2)
PAUSE 100
sound 7, (125,1,150,2,125,1,150,2,125,1,150,2,125,1,150,2,125,1,150,2)
PAUSE 300
sound 7, (125,1,150,2,125,1,150,2,125,1,150,2,125,1,150,2,125,1,150,2)
PAUSE 100
sound 7, (125,1,150,2,125,1,150,2,125,1,150,2,125,1,150,2,125,1,150,2)
return
65
LA CONTROLADORA PICAXE EN TECNOLOGÍA
BARRERA DE INFRARROJOS
Introducción
Una barrera infrarroja es un sistema compuesto por un diodo LED
emisor de infrarrojos y un fototransistor. Cando estos dos elementos
están enfrentados, separados una determinada distancia, el
fototransistor recibe luz infrarroja procedente del LED y conduce. Si se
interpone cualquier objeto opaco entre estos dos elementos, el
fototransistor dejará de conducir y si está conectado a un
microcontrolador, éste actuará según lo previsto en el programa que se
le ha cargado.
Componentes
Descripción
Led IR TSUS540
Fototransistor BPW96
Resistor entre 100Ω y 220 Ω ¼ w
Resistor 10KΩ ¼ w
Placa PICAXE08
Cantidad
Precio
aprox. €
1
1
5
2
1
0.30
0.50
0.02
0.02
0.02
Esquema
La resistencia limitadora del LED ha de tener un valor comprendido
entre 100 y 220 Ω. Con un valor bajo, la distancia la intensidad del haz
infrarrojo será mayor y por tanto, la separación entre emisor y receptor.
La resistencia Push Down de 10K, conectada entre el emisor del
fototransistor y masa, se puede eliminar si la placa del microcontrolador la
lleva incorporada.
Al igual que en el punto anterior, si nuestra placa posee altavoz, no
será necesario instalarlo.
66
LA CONTROLADORA PICAXE EN TECNOLOGÍA
Montaje
Fotodiodo TSUS540 en un
soporte de alambre
Se puede hacer un soporte para el fotodiodo y el transistor con un
trozo de alambre, (como el de un clic) de modo que queden como
en la foto de la izquierda. Las resistencias se sueldan directamente
a los componentes, teniendo la precaución de aislar las soldaduras
posteriormente con tubo termorretráctil. Si utilizamos alambre
acerado, podemos sujetar el emisor y el receptor con pequeños
imanes a una superficie de hierro.
Montaje para ensayo de una barrera de infrarrojos
Colocando los dos elementos juntos y paralelos, con la misma
orientación, el sistema funcionar como un detector de proximidad
reflexivo. Modificando ligeramente el ángulo que forman los dos
elementos, podemos aumentar la distancia de detección. La
distancia a la que se pueden detectar objetos puede llegar hasta
10 cm para objetos grandes, blancos y planos.
Montaje de un detector reflexivo
Montaje para ensayo del detector reflexivo
Por último, para evitar que la luz ambiental interfiera en el
funcionamiento del circuito produciendo falsas detecciones, es
conveniente introducir el fototransistor dentro de un trozo de tubo
opaco. También se puede colocar un filtro que sólo permita el paso
de radiación infrarroja.
Protección del fototransistor
contra los efectos de la luz
ambiental
67
LA CONTROLADORA PICAXE EN TECNOLOGÍA
Modificaciones
Si sustituimos el fotodiodo por un puntero láser podemos hacer que
nuestra barrera tenga un alcance enorme (hasta unos 100 m).
Utilizando espejos para variar la dirección del láser, podemos crear
una barrera perimetral alrededor de un objeto.
Montaje de una barrera láser
La entrada analógica del
Picaxe08, convierte cualquier
tensión comprendida entre 0 y
5v, en un número binario de
ocho bits, por lo que tenemos
256 valores digitales posibles.
Programación
Medida de la intensidad luminosa:
Podemos medir y visualizar el valor de la intensidad luminosa que
recibe el fototransistor usando los comandos Readadc y Debug:
'*********************************************************
'**********
MEDIDA LUZ *************************
'*********************************************************
'***************CONEXIONES*******************
'FOTOTRANSISTOR AL PIN 1
INICIO:
readadc 1,b0
debug b0
pause 100
goto inicio
'lee la señal analógica del fototransistor y carga el „valor
„en variable b0
'transmite el valor b0 a la pantalla del PC
'pausa
'saltar a inicio
Al cargar el programa, aparece inmediatamente en el monitor de
nuestro ordenador una ventana como la que se muestra a la
izquierda, donde se muestra el valor de la variable b0. Exponiendo
el fototransistor a distintas fuentes de luz se han obtenido los
siguientes resultados:
Tipo de luz
A 5 cm de un tubo fluorescente
Laser a 5 cm
Led blanco 14000 microcandelas
Fotodiodo IR TSUS540
Led rojo 5 mm normal
Distancia
Medida
5 cm
5 cm
5 cm
5 cm
5 cm
120
230
190
120
90
68
LA CONTROLADORA PICAXE EN TECNOLOGÍA
Barrera infrarroja digital:
En este caso, la señal procedente del fototransistor es tratada como un
valor digital. El microcontrolador PICAXE08, considera que una entrada
digital está a nivel alto cuando su tensión supera los 1,3 v. El programa
siguiente genera una señal acústica cuando se interrumpe el haz de
infrarrojos que llega al fototransistor:
'******************************************************
'**********
BARRERA IR **********************
'******************************************************
'***************CONEXIONES**********************
'FOTOTRANSISTOR AL PIN 1
INICIO:
if pin1 is off then sonido
„Si la entrada 1 está a nivel bajo (no le llega el haz
de infrarrojos) salta a la subrutina SONIDO.
goto inicio
SONIDO:
sound 0, (115,1,116,1,117,1,118,1,119,1,118,1,117,1,116,1,115,1)
goto inicio
Barrera infrarroja analógica:
Si consideramos la señal procedente del fototransistor como analógica,
podemos ajustar con precisión el umbral a partir del cual se salta a la
subrutina SONIDO. De este modo, se pueden evitar las interferencias
producidas por la luz ambiental.
'******************************************************
'********** BARRERA IR ANALOGICA ***********
'******************************************************
'***************CONEXIONES**********************
'FOTOTRANSISTOR AL PIN 1
INICIO:
readadc 1,b0
if b0<100 then sonido
goto inicio
SONIDO:
sound 0, (120,10)
goto inicio
69
LA CONTROLADORA PICAXE EN TECNOLOGÍA
CONSTRUCCIÓN MÓVIL
CONTROLADO POR PICAXE
CARACTERÍSTICAS
Se trata de un móvil más sencillo que el microrrobot capaz de moverse
aleatoriamente esquivando obstáculos, seguir líneas oscuras dibujadas
sobre fondo blanco y moverse hacia un foco de luz o alejarse del mismo.
El software necesario para controlar este móvil es similar al utilizado en el
microrrobot.
ESTRUCTURA
La estructura de este móvil, que simula un coche de juguete, está formada
fundamentalmente por una base de aluminio de 2 mm de espesor.
Este material es un material fácil de conseguir y nos permite un
mecanizado sencillo. En el momento del diseño debemos tener en cuenta
el resto de componentes que están sujetos a la base de aluminio para
realizar los orificios donde los colocaremos.
En la parte inferior se colocan los dos motorreductores cada uno con su
rueda, una rueda loca en la parte inferior delantera unida a la base a través
de un rodamiento. Y en la parte inferior también colocaremos los sensores
de contactos (microrruptores) y los sensores ópticos (CNY70).
En la parte superior se encuentran la batería, una placa de metracrilato
donde va alojada la placa controladora con el microcontrolador y una placa
para amplificar la intensidad. Además se ha previsto colocar dos antenas
que llevan en su extremo superior incorporado un LED.
70
LA CONTROLADORA PICAXE EN TECNOLOGÍA
Diseño de la base de aluminio (derecha) y de la placa de metacrilato
(izquierda).
ENERGÍA
Como fuente energética se ha elegido una batería de níquel-metal hidruro
de 6 elementos, con una capacidad de 650 mAh a 7,4 voltios. Del cable de
este elemento se ha sacado una derivación para dejar libre el terminal de
salida y no tener que desconectar el dispositivo para proceder a su
recarga.
Como los motores y la circuitería funcionan a 5 voltios, es preciso colocar
después del interruptor general un regulador de tensión 7805 para obtener
una tensión de 5 voltios estabilizada. Además, este circuito integrado tiene
protección contra sobrecargas y cortocircuitos, por lo que
evitará
problemas y averías al resto del sistema. Este elemento irá atornillado a la
base de aluminio de modo que ésta haga la función de disipador. Si no
conectamos eléctricamente nada a la base, no será preciso colocar una
lámina aislante entre el regulador y la base.
A continuación se muestra el circuito de alimentación y un resumen de las
características del regulador de tensión 7805:
t
71
LA CONTROLADORA PICAXE EN TECNOLOGÍA
MOTORES
Existen en el mercado muchos tipos de pequeños motores eléctricos con
reductora que podrían servir para nuestro móvil.
Necesitamos que dispongan de una relación de transmisión grande para
que la velocidad de salida sea pequeña. Se han colocado dos
motorreductores con las siguientes características:
-Relación de transmisión= 207:1
-Funciona entre 1,5 y 6 V.
-Compacto, todo protegido en una caja de plástico.
-Precio aproximado: 2,50 €
Como estos motores absorben una intensidad relativamente alta, no se
pueden conectar directamente al microcontrolador, que sólo puede
suministrar unos 25 mA. Por este motivo, habrá que intercalar entre el
microcontrolador y los motores un elemento que se encargue de
suministrar a los motores la intensidad y polaridad adecuada en función de
las señales que recibe del microcontrolador. Este elemento es el circuito
integrado L293D que permite gobernar dos motores mediante cuatro
entradas de control AB para el motor 1 y CD para el motor 2. Estas
entradas las conectaremos a cuatro salidas del microcontrolador.
Para evitar las interferencias que pueden producir las escobillas de los
motores eléctricos, es necesario colocar un condensador de 0,1 µF en
paralelo con los bornes del motor para que actúe a modo de filtro.
La fijación de los motores a la base se puede hacer mediante escuadras,
adhesivo o bridas. En este caso hemos fabricado un par de escuadras de
aluminio y las hemos fijado a la base y al motor mediante tornillos M3.
El aspecto de la primera capa del robot se puede ver a la izquierda.
La fijación de los motores a la base se puede hacer mediante escuadras,
adhesivo o bridas. En este caso la solución más sencilla ha sido pegar
directamente con adhesivo termofusible los motorreductores con sus
correspondientes ruedas a la base.
72
LA CONTROLADORA PICAXE EN TECNOLOGÍA
CRUCE DE SEMÁFOROS
CONTROLADO POR PICAXE
Como ejemplo de aplicación de la Microcontroladora Picaxe, se propone un
proyecto ideal para alumnos de 4º de la ESO dentro de la asignatura de
Tecnología.
El enunciado sería el siguiente:
“Se realizará una sencilla maqueta con un cruce de dos carreteras de un
único sentido. Dicha maqueta constará de dos semáforos que regularán el
tráfico de las dos vías y cuatro semáforos de peatones. Para ello
dispondremos del aula- taller y de todos los materiales y herramientas allí
existentes.”
Concretamente en este caso hemos utilizados:
Contrachapado
Tubos de PVC
Listón de Pino
Cables
Diodos Led
Resistencias de 220 Ω
Clemas de conexión
Las herramientas empleadas han sido las siguientes:
Sierra de cinta
Pistola de termofusible
Barrena
Destornillador
Martillo
Clavos
73
LA CONTROLADORA PICAXE EN TECNOLOGÍA
Una vez realizada la maqueta se comprobará el estado de las conexiones
y se procederá a programar la microcontroladora con el software de
PICAXE Programming Editor.
ACTIVIDADES
Se proponen los siguientes programas antes de la programación total del
cruce.
ACTIVIDAD 1
Programa “ precaucion” que deberá realizar las siguientes acciones:
Semáforos para vehículos en ámbar intermitentes cada segundo
Los semáforos de peatones permanecerán apagados
ACTIVIDAD 2
Regulación de un semáforo, programa “semaforo”, que deberá realizar
las siguientes acciones:
El semáforo de la carreteras 1 deberá realizar un ciclo de trabajo. En dicho
ciclo, el rojo deberá estar 10 segundos encendido, pasará a verde y
permanecerá otros 10 segundos en este color, para finalmente pasar a
ámbar 5 segundos y volver al rojo nuevamente.
Los semáforos de peatones permanecerán apagados
ACTIVIDAD 3
Regulación del cruce completo, programa “cruce” que deberá realizar
las siguientes acciones:
Para una calle:
El rojo de una de las carreteras deberá estar 13 segundos encendido,
pasará a verde y permanecerá otros 13 segundos en este color, para
finalmente pasar a ámbar 5 segundos y volver al rojo nuevamente.
Lo dos semáforos de peatones deberán estar rojos cuando el semáforo
que controla la carretera esté en verde. Cuando éste pase a ámbar, el
color verde de los peatones se pondrá intermitente cambiando a rojo.
Antes de ponerse en verde el semáforo de circulación esperará 3
segundos por precaución.
En la otra calle el procedimiento será el mismo pero a la inversa.
ACTIVIDAD 4
Colocar dos pulsadores en la entrada de forma que active cada uno de los
programas.
74
LA CONTROLADORA PICAXE EN TECNOLOGÍA
SOLUCIONES
Vamos a colocar las salidas del microcontrolador de la siguiente forma:
SALIDAS
01234567
SALIDA 0
- Verde semáforo calle 1
SALIDA 1
- Ámbar semáforo calle 1
SALIDA 2
- Rojo semáforo calle 1 y rojo de los semáforos de
peatones de la calle 2
SALIDA 3
- Verde semáforo calle 2
SALIDA 4
- Ámbar semáforo calle 2
SALIDA 5
- Rojo semáforo calle 2 y rojo de los semáforos de
peatones de la calle 1
SALIDA 6
- Verde de los semáforos de peatones de la calle 1
SALIDA 7
- Verde de los semáforos de peatones de la calle 2
ACTIVIDAD 1
precaucion:
high 1 wait 1 low 1
high 4 wait 1 low 4
goto precaucion
ACTIVIDAD 2
semaforo:
high 0
wait 10
low 0 low 1
wait 5
low 1
goto semaforo
ACTIVIDAD 3
cruce:
high 0 high 5 high 6
75
LA CONTROLADORA PICAXE EN TECNOLOGÍA
wait 10
low 0 high 1 low 6 wait 1 high 6 wait 1 low 6 wait 1 high 6 wait 1 low 6
wait 1 high 6
low 1 high 2 low 6
wait 3
low 5 high 3 high 7
wait 10
low 3 high 4 low 7 wait 1 high 7 wait 1 low 7 wait 1 high 7 wait 1 low 7
wait 1 high 7
low 4 high 5 low 7
wait 3
low 2
goto cruce
ACTIVIDAD 4
programa:
wait 1
if input1 is on and input2 is on then precaucion
if input1 is on and input2 is off then semaforo
if input1 is off and input2 is off then cruce
precaucion:
high 1 wait 1 low 1
high 4 wait 1 low 4
goto precaucion
semaforo:
high 0 high 5
wait 8
low 0 high 1
wait 2
low 1 high 2
wait 3
low 5 high 3
wait 8
low 3 high 4
wait 2
low 4 high 5
wait 3
low 2
goto semaforo
cruce:
high 0 high 5 high 6
wait 10
low 0 high 1 low 6 wait 1 high 6 wait 1 low 6 wait 1 high 6 wait 1 low 6 wait
1 high 6
low 1 high 2 low 6
wait 3
low 5 high 3 high 7
wait 10
76
LA CONTROLADORA PICAXE EN TECNOLOGÍA
low 3 high 4 low 7 wait 1 high 7 wait 1 low 7 wait 1 high 7 wait 1 low 7 wait
1 high 7
low 4 high 5 low 7
wait 3
low 2
goto cruce
Esquema de conexiones a la placa
77
LA CONTROLADORA PICAXE EN TECNOLOGÍA
La casa soñada
Como ejemplo de aplicación de la Microcontroladora Picaxe, se
propone un proyecto ideal para alumnos de 4º de la ESO dentro de la
asignatura de Tecnología.
El enunciado sería el siguiente:
Construcción de la maqueta de una casa que tendrá las
características siguientes:
La maqueta se realizará en seis partes o módulos, que se
encajaran entre ellos para integrar en una unidad:
1.- Vivienda.
4.- Torreta con depósito de agua
2.- Garaje.
5.- Entradas a la vivienda y al garaje
3.- Piscina y ducha
6.- Jardín.
Cada módulo estará asentado en una base que hará el papel de un
subsuelo por donde irán las instalaciones.
La vivienda será de una planta con vestíbulo, una habitación, un
salón y comedor, cuarto de baño y cocina.
El conjunto estará rodeado por una valla con dos puertas: una para
el garaje y otra para la vivienda.
La estructura será de contrachapado de 2 o 3 mm de grosor para
las paredes y listones de madera de sección cuadrada de 5 mm.
El tejado será desmontable.
La iluminación de la maqueta y los sistemas eléctricos se
controlarán desde una consola exterior.
78
LA CONTROLADORA PICAXE EN TECNOLOGÍAS
1.- Los planos del proyecto:
Utilizando un programa CAD vamos a diseñar la vivienda que
construiremos a lo largo del curso.
Los seis módulos presentan la siguiente distribución en planta:
Siendo:
Módulo 1: La vivienda. En formato A4 hemos distribuido las
distintas habitaciones de la casa.
Módulo 2: El garaje. En formato A5 hemos dibujado el plano del
garaje.
Módulo 3: La piscina. En formato A4.
Módulo 4: La torreta para el depósito. En formato A5.
Módulo 5: El jardín de entrada. En formato A4.
Módulo 6: El jardín adosado. En formato A5
79
LA CONTROLADORA PICAXE EN TECNOLOGÍAS
2.- Vistas generales:
3.- Construcción del subsuelo de los seis módulos de la
parcela:
Con aglomerado de 10 mm de grueso se construyen
tres piezas
rectangulares de dimensiones 297 x 210 mm (módulos A4) y otros
tres de 148 x 210 mm (módulos A5)´Para ello se cortan los siguientes
listones:
80
LA CONTROLADORA PICAXE EN TECNOLOGÍAS
Se cortan tres placas de contrachapado de 3 mm de 297 x 210 mm y
otras tres de 148 x 210 mm. Se colocan, uniéndolas con cola y
reforzándolas con puntas finas.
Los seis módulos se unen con tornillos, tuercas y arandelas.
81
LA CONTROLADORA PICAXE EN TECNOLOGÍAS
4.- Planos de la construcción:
Presentamos los planos de las piezas de la maqueta de la vivienda y
el garaje. Pueden realizarse con un programa de diseño por
ordenador o con instrumentos de dibujo tradicionales.
82
LA CONTROLADORA PICAXE EN TECNOLOGÍAS
5.- Estructura de la maqueta:
83
LA CONTROLADORA PICAXE EN TECNOLOGÍAS
6.- Circuito de alumbrado:
84
LA CONTROLADORA PICAXE EN TECNOLOGÍAS
85
LA CONTROLADORA PICAXE EN TECNOLOGÍAS
ESQUEMA DE CONEXIONES A LA PLACA
Una vez realizada la maqueta se comprobará el estado de las
conexiones y se procederá a programar la microcontroladora con el
software de PICAXE Programming Editor.
86
LA CONTROLADORA PICAXE EN TECNOLOGÍAS
ACTIVIDADES
Se proponen los siguientes programas:
ACTIVIDAD 1
Realizar el programa “SECUENCIA” que
deberá realizar
las
siguientes acciones:
Programa que permita encender y apagar cíclicamente cada zona
de la vivienda y el garaje
„**************************************************************
„*******************
SECUENCIA
**********************
„**************************************************************
„CONEXIONES:
„LDR A LA ENTRADA 0
„DOS LAMPARAS A LA SALIDA 4
SECUENCIA:
High 0
Wait 1
High 1
Wait 1
High 2
Wait 1
High 3
Wait 1
low 0
Wait 1
low 1
Wait 1
Low 2
Wait 1
low 2
Wait 1
Goto secuencia
87
LA CONTROLADORA PICAXE EN TECNOLOGÍAS
ACTIVIDAD 2
Realizar el programa “LDR” que deberá realizar las siguientes
acciones:
“Encender y apagar automáticamente la iluminación exterior de la
vivienda (porche delantero y trasero) en función de la intensidad
lumínica exterior controlada por una resistencia LDR”.
„**************************************************************
„***********************
LDR
**************************
„**************************************************************
„CONEXIONES:
„LDR A LA ENTRADA 0
„DOS LAMPARAS A LA SALIDA 4
LDR:
Readadc 0, b0
If b0<100 then enciende
If b0>100 then apaga
ENCIENDE:
High 4
Goto LDR
APAGA:
low 4
Goto LDR
ACTIVIDAD 3
Realizar el programa “CLIMATIC” que deberá realizar las siguientes
acciones:
“Encender y apagar automáticamente la instalación de calefacción y
aire acondicionado de la vivienda (ventilador) en función de la
intensidad lumínica exterior controlada por una resistencia LDR”.
ACTIVIDAD 4
Colocar un pulsador en la entrada de forma que active cada uno de
los programas.
88
LA CONTROLADORA PICAXE EN TECNOLOGÍAS
BARRERA ELECTROMECÁNICA
Diseño y construcción de una barrera autoportante, con mecanismo
reductor, sistema eléctrico de paro en subida y bajada, señalización
luminosa y con el interior visible en todo momento.
Para empezar el diseño del proyecto, partimos de la función que ha
de realizar el mismo así como definir con la máxima precisión su
funcionamiento. Se van a utilizar materiales de diferentes
características, como maderas, para la caja de construcción, tornillos,
tuercas, arandelas, material eléctrico, mecanismos como rueda
dentada, tornillo sinfín, etc.
Comenzamos cortando y preparando las piezas de madera, su base,
paredes laterales y contrapeso; realizamos orificios para los diferentes
mecanismos con la taladradora, así como unión de las diferentes
partes para su montaje.
Montamos la base de mecanismos, donde van acoplados el soporte
motor, soporte eje del sistema reductor y la regleta de entrada de
conexiones.
Una vez realizado el montaje, colocamos el motor y acoplamos el
sistema reductor, formado por tornillo sinfín de polietileno módulo 0,5
6 x 9 mm, rueda dentada doble de módulo 0,5 50/10 dientes,
montamos el eje del sistema reductor acoplado al motor.
A continuación, preparamos el lateral de la base donde se van a
colocar los interruptores final de carrera y la regleta de luces (diodos
led). Una vez realizado los orificios necesarios para su montaje,
fijamos los dos finales de carrera y la regleta de conexiones en los
laterales de madera, así como también colocamos el interruptor
general.
Posteriormente, pasamos al montaje de paredes laterales unidas
mediante tornillos a la base inferior; después construimos el
89
LA CONTROLADORA PICAXE EN TECNOLOGÍAS
contrapeso de la barrera y lo encolamos y pegamos al listón (barrera)
como se ve en el montaje.
Una vez tenemos los laterales, nos queda montar el eje principal,
formado por varilla roscada M4 x 150 mm. y cortada a una longitud de
120 mm, donde irá acoplada la rueda dentada de módulo 1 60, 58
dientes, la cual será movida por el tornillo sinfín que va montado sobre
el eje del motor de módulo 1 12 x 32 mm.
En el eje principal, se coloca la barrera con su contrapeso, para que
cuando dicho eje sea movido por la rueda dentada acoplada al sinfín
del eje del motor, ésta suba o baje hasta parar al accionar uno de los
finales de carrera.
Por último, ajustamos la palanca pequeña que acciona los
interruptores finales de carrera de forma que quede paralela a la
barrera ya que debe efectuar el mismo movimiento que ésta.
Y una vez terminada la parte mecánica, pasamos a realizar el
esquema eléctrico, que se muestra a continuación.
Esta barrera, va a ser controlada por medio de un microcontrolador
PICAXE 18, preparado para ser programado en Basic, lo cual
simplifica mucho el proceso de programación.
Como elementos de entrada, tenemos los finales de carrera y los
controladores como fotodiodo y fototransistor, los cuales realizan el
cierre y apertura de la barrera, según esquema. (2)
CONEXIONES
Este es el circuito de montaje de la placa que lleva el controlador
Picaxe, donde se van a conectar los elementos de entrada y salida,
así como otros elementos para su funcionamiento.
90
LA CONTROLADORA PICAXE EN TECNOLOGÍAS
Final de carrera superior → Input 2 (“1” en programación)
Final de carrera inferior → Input 0 (“1” en programación)
Sensor Presencia vehículo → Input 6 (“1” en programación)
Control Motor → Output 0 Ver cuadro
Control Motor → Output 1 Ver cuadro
Semáforo Rojo → Output 2 (high ilumina, low no ilumina)
Semáforo Verde → Output 3 (high ilumina, low no ilumina)
PROGRAMACIÓN
inicio:
if input2 is on and input0 is off then bajabarrera
goto inicio
bajabarrera:
low output0
high output1
high output2
low output3
if input2 is off and input0 is on then paro
goto bajabarrera
paro:
low output0
low output1
high output3
low output2
goto inicio
Sube barrera
inicio:
if input0 is on and input6 is on then subebarrera
goto inicio
subebarrera:
high output1
high output0
high output2
low output3
if input2 is on and input0 is off then paro
goto subebarrera
paro:
low output0
low output1
high output3
low output2
goto inicio
'*********Control barrera levadiza********'
'***FCsup -> input 2***
'***FCinf -> input 0***
'***Sensor -> input 6***
'***Control inversión giro motor -> output 0***
'***Control alimentación motor -> output 1***
'***Semáforo Rojo -> output 2***
'***Semáforo Verde -> output 3***
91
LA CONTROLADORA PICAXE EN TECNOLOGÍAS
inicio:
if input0 is on and input2 is off then paso1
goto inicio
'***Motor parado***
'***Puente abajo***
'***Semáforo en verde***
'***consulta si Sensor está activado***
paso1:
low output0
low output1
high output3
low output2
if input6 is on then paso2
goto inicio
'***Motor sube***
'***Semáforo en rojo***
paso2:
high output0
high output1
high output2
low output3
if input0 is off and input2 is on then paso3
goto paso2
'***Motor parado***
'***Semaforo en rojo***
'***Temporización de 5s.***
paso3:
low output0
low output1
wait 5
if input0 is off and input2 is on then paso4
goto paso2
'***Motor baja***
'***Semáforo en rojo***
paso4:
low output0
high output1
high output2
low output3
if input0 is on and input2 is off then inicio
goto paso4
92
LA CONTROLADORA PICAXE EN TECNOLOGÍAS
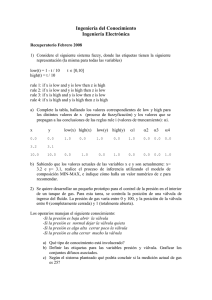
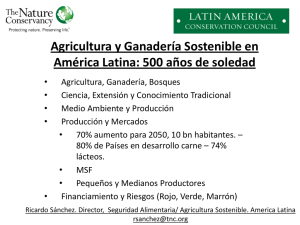



![[Vídeo] No se aceptan propinas](http://s2.studylib.es/store/data/003717999_1-272e1d5e2ba4f5470daef31983d2f170-300x300.png)