525.9Kb - DSpace@UCLV - "Marta Abreu" de Las Villas
Anuncio

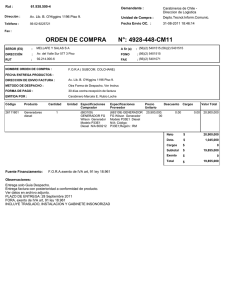
Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Centro de Estudios de Electroenergética TRABAJO DE DIPLOMA Título: “Control de frecuencia, carga y generación en sistemas electroenergéticos con la interconexión de plantas diesel” Autor: Lisbanet Rodríguez Hernández E-mail: Lisbonet@uclv.edu.cu Tutor: Dr. Ing. Leonardo Casas Fernández Dpto. de Electroenergética Facultad de Ingeniería Eléctrica. UCLV E-mail: lcasas@uclv.edu.cu Santa Clara 2006 “Año de la Revolución Energética en Cuba” “Año de la Revolución Energética en Cuba”. Hago constar que el presente trabajo fue realizado en la Universidad Central “Marta Abreu” de las Villas (UCLV) como parte de la culminación de los estudios de la carrera de Ingeniería eléctrica. Autorizo a que el mismo sea utilizado por la UCLV para los fines que se estimen convenientes, tanto de forma parcial como total y que además no pueda ser presentado en eventos, ni publicado, sin la autorización expresa de la UCLV. . Firma del autor Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada. . Firma del tutor Firma del jefe de dpto. donde se defiende el trabajo . Firma del Responsable de información Científico-Técnica PENSAMIENTO AGRADECIMIENTOS Quiero remitir mis más sinceros agradecimientos a: ¾ Mis extraordinarios padres y hermano por su incondicional apoyo, cariño y confianza; ¾ Mi esposa por su gran ayuda y dedicación; ¾ Toda mi familia; ¾ Mi tutor el compañero, Dr. Leonardo Casas Fernández, por su gran atención, experiencia y paciencia en la realización de este trabajo; ¾ Mis compañeros por compartir conmigo todos estos inolvidables años; ¾ Todos los que tuvieron que ver con mi formación como profesional; ¾ Los que me ayudaron en la realización de este trabajo; en fin a todos, muchísimas gracias de todo corazón. TAREA TECNICA Para lograr el objetivo de este trabajo resulta imprescindible ejecutar las siguientes tareas técnicas: • Realizar una amplia revisión bibliográfica y su posterior análisis, que permita fundamentar teóricamente el trabajo y establecer una estrategia para el correcto funcionamiento de las pequeñas plantas diesel dentro del Sistema. • Valorar las estrategias que deben emplearse en la operación conjunta de las pequeñas unidades diesel con las grandes termoeléctricas. ________________ Firma del Autor _______________________ Firma del Tutor RESUMEN En esta investigación, titulada “Control de frecuencia, carga y generación en sistemas electroenergéticos con la interconexión de plantas diesel” se realiza una amplia revisión bibliográfica que permitió fundamentar teóricamente la misma y argumentar la necesidad de la utilización de los generadores acoplados a motores diesel, como una forma de generación distribuida. Con esta alternativa se pretende incrementar la potencia instalada en el sistema electro energético nacional, así como, su utilización en casos de emergencias ya sea por la salida de alguna planta termoeléctrica o en estados de catástrofes naturales. En el desarrollo de este trabajo se exponen claramente las ventajas y desventajas de la utilización de estas plantas, sus formas de operación, así como su fácil manejo a la hora de ser conectadas. Además se hace un estudio acerca del control de frecuencia y generación en un sistema de potencia en cuanto a las acciones para mantenerla en un rango permisible, los riesgos de operar las plantas fuera de este rango y los dispositivos que permiten la posibilidad de la operación correcta de un sistema eléctrico. Índice _________________________________________________________________________ INDICE INTRODUCCION .................................................................................................................1 CAPITULO I Los generadores diesel, variante de generación distribuida.........3 1.1 Introducción. ........................................................................................................... 3 1.2 Planta diesel. .......................................................................................................... 4 1.2.1 Formas de utilización de las plantas diesel........................................ 5 1.2.2 Beneficios de las plantas diesel. ......................................................... 6 1.2.3 Métodos de operación de los diesel: ................................................. 7 CAPITULO II Características del control de frecuencia y carga ..........................9 2.1. Riesgos en la operación con baja frecuencia. .............................................. 9 2.2 Teoría y métodos del control de frecuencia. .................................................. 9 2.3 Acciones y medios para mantener la frecuencia. ....................................... 12 2.4 Consideraciones generales sobre la caracterización de las cargas...... 12 2.5 Liberación de carga por baja frecuencia. ..................................................... 14 2.6 Bases para la selección de esquemas de liberación de carga............... 14 CAPITULO III Control de generación en sistemas eléctricos de potencia...... 16 3.1 Control de generación. ...................................................................................... 16 3.2 El gobernador de velocidad en estado estable. ......................................... 17 3.3 Modelación del gobernador de velocidad. .................................................... 19 3.4 Control general del sistema motor – generador.......................................... 24 3.5 Las Plantas Diesel como reguladores del voltaje y la frecuencia..... 25 CONCLUSIONES:............................................................................................................ 27 RECOMENDACIONES:............................................................................................... 28 BIBLIOGRAFIA: ............................................................................................................... 29 ANEXO 1:........................................................................................................................... 30 Introducción _________________________________________________________________________ INTRODUCCION Desde hace varios años nuestro país viene afrontando problemas con el suministro de energía eléctrica debido al envejecimiento y deterioro de las redes eléctricas y las plantas térmicas. Este quebrantamiento en las centrales se debe, a pesar de los años de explotación de estas. A lo anteriormente mencionado, se le añaden los daños provocados por los huracanes en las líneas de transmisión, subtransmisión y distribución que dejan sin servicio eléctrico a vastas regiones del país durante semanas. La salida de operación de la planta “Antonio Guiteras” en Matanzas, por ser la mayor del país, produjo adicionalmente, serias afectaciones debidas, precisamente, al gran déficit de generación que provoca su ausencia por su gran potencia (300 MW). A raíz de estos problemas se decide por la máxima dirección del país y los especialistas de la Unión Eléctrica, adquirir un grupo apreciable de plantas “pequeñas”, pero de rápida instalación, que utilizan el diesel como combustible para suplir el déficit de generación existente. La introducción de la nueva forma de generar energía eléctrica ha significado un reto para los técnicos y especialistas, ya que constituye una técnica con la que no se cuenta con gran experiencia. Entre los principales aspectos que ha sido necesario enfrentar figuran: • La operación de una planta diesel (máquina pequeña) ante un Sistema Eléctrico de Potencia de mayor capacidad, lo que conlleva el conocimiento de los parámetros, formas de utilización, beneficios y métodos de explotación. • El estudio del control de la frecuencia del nuevo sistema eléctrico, el que conlleva las acciones necesarias para mantenerla dentro del rango establecido. Los pasos y mediciones que se requieren para un efectivo control de las unidades, la liberación de carga por baja frecuencia y los riesgos a los que está expuesta la planta cuando trabaja bajo estas condición 1 Introducción _________________________________________________________________________ • La caracterización de las cargas, así como las bases para la selección de esquemas de liberación de estas. • El control automático de generación (AGC) y la asignación de la potencia a cada unidad. De los temas tratados anteriormente se establecen los siguientes objetivos: • Realizar una amplia revisión bibliográfica y su posterior análisis, que permita fundamentar teóricamente el trabajo y establecer una estrategia para el correcto funcionamiento de las pequeñas plantas diesel dentro del Sistema. • Valorar las estrategias que deben emplearse en la operación conjunta de las pequeñas unidades diesel con las grandes termoeléctricas. El trabajo se estructura de la siguiente forma: Introducción Desarrollo: • Capítulo Ι :” Los generadores diesel, variante de generación distribuida. ” • Capitulo ΙΙ : “Características del control de frecuencia y carga”. • Capitulo ΙΙΙ : “Control de generación en sistemas eléctricos de potencia. “ Conclusiones y Recomendaciones. Bibliografía. 2 Capítulo I _________________________________________________________________________ CAPITULO I “Los generadores diesel, variante de generación distribuida”. 1.1 Introducción. La Generación Distribuida (GD) representa un cambio en el paradigma de la generación de energía eléctrica centralizada. Aunque se pudiera pensar que es un concepto nuevo, la realidad es que tiene su origen, de alguna forma, en los inicios mismos de la generación eléctrica. De hecho, la industria eléctrica se fundamentó en la generación en el sitio del consumo. Después, como parte del crecimiento demográfico y de la demanda de bienes y servicios, evolucionó hacia le esquema de Generación Centralizada, precisamente porque la central eléctrica se encontraba en el centro geométrico del consumo, mientras que los consumidores crecían a su alrededor. Sin embargo, se tenían restricciones tecnológicas de los generadores eléctricos de corriente continua y su transporte máximo por la baja tensión, que era de 30 a 57 kilómetros. Con el tiempo, la generación eléctrica se estructuró como se conoce hoy en día, es decir, con corriente alterna y transformadores, lo que permite llevar la energía eléctrica prácticamente a cualquier punto alejado del centro de generación. Bajo este escenario, se perdió el concepto de Generación Centralizada, ya que las grandes centrales se encuentran en lugares distantes de las zonas de consumo, pero cerca del suministro del combustible y el agua. En los últimos años, factores energéticos (crisis petrolera), ecológicos (cambio climático) y de demanda eléctrica (alta tasa de crecimiento) en nuestro país, plantearon la necesidad de alternativas tecnológicas para asegurar, por un lado, el suministro oportuno y de calidad de la energía eléctrica y, por el otro, el ahorro y el uso eficiente de los recursos naturales. 3 Capítulo I _________________________________________________________________________ Una de estas alternativas tecnológicas es generar la energía eléctrica lo más cerca posible al lugar del consumo, precisamente como se hacía en los albores de la industria eléctrica, incorporando ahora las ventajas de la tecnología moderna y el respaldo eléctrico de la red del sistema eléctrico. A esta modalidad de generación eléctrica se le conoce como Generación Dispersa, o más cotidianamente, Generación Distribuida. Una de las formas de utilización de la generación distribuida es el uso de motores de combustión interna (motores diesel). Nuestro país se encuentra inmerso en un proceso de transformaciones en el sistema electroenergético nacional, en el cual, su principal estrategia es la explotación de estas plantas para solucionar de forma rápida y económica los problemas existentes con la generación en el SEN. En este capítulo se argumentará sobre las formas de utilización, sus ventajas y procedimientos que se utilizan para diseñar la estrategia de aplicación en nuestro país. 1.2 Planta diesel. En términos de un sistema eléctrico, una planta diesel se puede representar como un motor primario diesel y un generador. Idealmente, el motor primario es capaz de suministrar cualquier demanda de potencia para mantener la frecuencia constante, y el generador sincrónico conectado a él, debe mantener el voltaje constante bajo cualquier estado de carga. La figura 1.1: es un esquema de una planta diesel. El motor debe ser capaz de suministrar la energía mecánica que demande el generador y con esto se logra una frecuencia constante, manteniendo constante la velocidad del rotor controlado por el gobernador de velocidad. El generador sincrónico, por su parte puede controlar el voltaje de salida por medio de la corriente de excitación. Así, como una unidad, el sistema de generación con diesel puede establecer el control de su frecuencia y el voltaje de salida. La inercia del motor, la sensibilidad del gobernador y la capacidad de potencia de la máquina afecta su habilidad de respuesta a los cambios de la frecuencia. La habilidad del generador sincrónico de controlar su voltaje se afecta por la 4 Capítulo I _________________________________________________________________________ constante de tiempo del devanado de campo, la disponibilidad de la corriente directa (DC) que suministra potencia a los campos del rotor y la respuesta del mecanismo de control de voltaje. Figura 1.1: Esquema de una palta diesel. Estas plantas existen en capacidades desde alrededor de 1 kW hasta del orden de decenas de MW, con eficiencias próximas al 40%, la temperatura de los gases de escape son del orden de los 400°C; se instalan en plazos muy cortos, tienen un bajo costo de inversión, una vida útil de 25 años, alta eficiencia a baja carga, consumo medio de agua, poco espacio para instalación, flexibilidad de combustibles y su crecimiento puede ser modular. 1.2.1 Formas de utilización de las plantas diesel Las plantas diesel tienen múltiples aplicaciones, entre las que se destacan su uso como plantas de emergencia o de respaldo. Para evaluar la operación de una planta dada existen ciertas definiciones que ayudan a la selección, evaluación y explotación de las mismas. Carga pico: Es la generación máxima para satisfacer los requerimientos de una instalación, se refiere al suministro de la energía eléctrica en períodos de horarios picos, en los cuales la energía demandada por el sistema se incrementa 5 Capítulo I _________________________________________________________________________ considerablemente de forma tal que no pueda ser totalmente servida por las centrales termoeléctricas. Generación aislada o remota. Este término se usa para referirse al modo de operación de la planta en relación con el sistema eléctrico al cual puede asociarse. Cuando opera aislada del sistema para el autoabastecimiento de una entidad, se dice que opera aislada o en isla. Un ejemplo de ello es la utilización de estos equipos en los cayos del litoral norte, así como en la Isla de la Juventud y zonas montañosas donde sea más económico su montaje que llevar el suministro mediante redes eléctricas. Soporte a la red de distribución. A veces en forma eventual o bien periódicamente, la empresa eléctrica requiere reforzar su red eléctrica instalando pequeñas plantas que pueden ubicarse en la subestación de potencia, debido a altas demandas en diversas épocas del año, o por fallas en la red. De esta forma se logra una mayor fiabilidad de la generación de energía en aquellos lugares que por su importancia social o económica requieran de este servicio de forma permanente, como son: hospitales, centros de elaboración de alimentos, frigoríficos y otras entidades. En algunos países estos equipos se utilizan como plantas de emergencia de los generadores eólicos, es decir, cuando la intensidad del viento disminuye, la turbina de aire disminuye la potencia entregada y para compensar esta disminución de potencia, el generador diesel comienza a funcionar supliendo el déficit. Además se instalan para ser utilizadas como, plantas de emergencia, en caso de fallo en el suministro. 1.2.2 Beneficios de las plantas diesel. El auge de estos sistemas se debe a los beneficios inherentes a la aplicación de esta tecnología, tanto para el país como para la red eléctrica. A continuación se listan algunos de los beneficios: 6 Capítulo I _________________________________________________________________________ a) Beneficios para el país: 9 Incremento en la confiabilidad. 9 Aumento en la calidad de la energía. 9 Reducción del número de interrupciones. 9 Uso eficiente de la energía. 9 Disminución de emisiones contaminantes. b) Beneficios para el SEN: 9 Reducción de pérdidas en transmisión y distribución. 9 Abasto en zonas remotas. 9 Libera capacidad del Sistema. 9 Proporciona mayor control de energía reactiva. 9 Mayor regulación de voltaje. 9 Disminución de inversión. 9 Menor saturación. 9 Reducción del índice de fallas. 1.2.3 Métodos de operación de los diesel: Estos equipos pueden ser explotados principalmente de dos formas: a) Operación incorporada a la red. En este método, los grupos son conectados a una barra del sistema entregando una potencia fija a una frecuencia y voltaje constante. Esta frecuencia es controlada por la planta seleccionada por el despacho, para mantener este parámetro dentro del rango permisible. El objetivo de los bloques generadores pequeños es operar en caso de un incremento brusco de la carga o en caso de déficit de energía. Estas acciones se realizan de forma rápida por su gran facilidad de sincronización y su rápida puesta en funcionamiento. Con esta estrategia de operación, los circuitos dejan de ser circuitos donde la potencia fluye en un solo sentido. 7 Capítulo I _________________________________________________________________________ b) Operación en isla: Como ya se mencionó, en este caso la planta se encarga de llevar tanto la frecuencia como el voltaje en las cargas asociadas a la instalación, sin que reciba respaldo del Sistema Eléctrico. La operación con este esquema puede ser con una o varias plantas. 8 Capítulo II _________________________________________________________________________ CAPITULO II “Características del control de frecuencia y carga”. 2.1. Riesgos en la operación con baja frecuencia. El principal problema en la operación con baja frecuencia es la presencia de esfuerzos físicos de vibración en los álabes de las turbinas de baja presión, dado que los efectos de estos esfuerzos son acumulativos, es esencial la restauración de la frecuencia a su valor de operación nominal. El segundo problema se refiere al funcionamiento de los sistemas auxiliares de las plantas, impulsados por motores de inducción. A frecuencias menores de 57Hz, la capacidad de la planta puede ser severamente reducida debido a la disminución de la salida de las bombas de suministro a la caldera y de los ventiladores que proporcionan el aire para la combustión. En el caso de las plantas nucleares los reactores pueden calentarse debido a la disminución en el flujo del refrigerante. Si la frecuencia disminuye demasiado las unidades generadoras pueden salir de operación en el sistema. Además de evitar las consecuencias antes mencionadas, es necesario restablecer la frecuencia lo más pronto posible a su valor normal para que el área afectada pueda volver a conectarse al sistema de potencia. 2.2 Teoría y métodos del control de frecuencia. Una tarea de gran complejidad en la operación de un sistema eléctrico es alcanzar un efectivo control de frecuencia, pues implica dominar los diapasones de potencia necesarios para dicho control, lo que depende de las características de la carga del sistema, así como conocer los parámetros de los sistemas de control de los generadores y sus características. Las dimensiones actuales de los Sistemas Eléctricos de Potencia (SEP) obligan al uso de sistemas automáticos para el control de la frecuencia, entre otras razones para: a) Incrementar la rapidez del control y por tanto disminuir las desviaciones de frecuencia. 9 Capítulo II _________________________________________________________________________ b) Disminuir la carga de trabajo de los operadores y por tanto evitar errores en la operación del sistema. c) Efectuar el control de forma económica. d) Propiciar menos acciones de control y contribuir a disminuir el desgaste y por tanto el mantenimiento de las unidades. La necesidad de mantener la frecuencia del sistema con pocas variaciones alrededor de la frecuencia nominal, propicia un trabajo más eficiente de las cargas que dependen de la misma como es el caso de la carga motora, sobre todo de motores de inducción, que constituye un por ciento importante de la carga de cualquier sistema, incluso influye en la eficiencia de las propias plantas generadoras en las que una buena parte de la carga de la planta son los motores de inducción. Las desviaciones de la frecuencia más allá de 0.5 Hz. produce afectaciones por vibraciones en las turbinas de vapor que hacen imprescindible el acortamiento de los períodos de mantenimiento. Estas afectaciones dependen del valor de la desviación de la frecuencia y del tiempo de duración de la misma. Las variaciones de la frecuencia producen además un funcionamiento poco satisfactorio en la medición del tiempo realizada por los relojes eléctricos que se alimenten del Sistema. En los últimos años se han estado instalando cargas de magnitudes apreciables que producen bruscas oscilaciones de la frecuencia en el Sistema, lo que ha obligado a buscar soluciones prácticas que las reduzcan, por lo que un control de frecuencia eficiente se ha convertido en una de las tareas más complejas en la operación del Sistema, ya que estas acciones deben realizarse con un mínimo gasto de combustible y mínimo desgaste de las unidades que participan en este control por medio de la reducción del número de pasos de control a efectuar. Al conjunto de estas acciones se les denomina Control Automático de la Generación (AGC). Entre las formas o métodos de controlar la frecuencia se destacan dos: • El control de la frecuencia constante en un sistema tiene que realizarse de forma organizada. La regulación primaria de la frecuencia se realiza por 10 Capítulo II _________________________________________________________________________ • los propios gobernadores de velocidad de los motores primarios de los generadores; dicha regulación no restablece la frecuencia al valor nominal (control primario). Para realizar esta función se utilizan los dispositivos de control secundario. El generador que lleva el control de la frecuencia solo suministra la diferencia entre la demanda planificada y la real. La potencia del generador o planta que controla la frecuencia debe ser en el orden del 5 -10% de la capacidad total del sistema para lograr una operación efectiva. Este modo de operación permite operar las unidades generadoras más eficientes a plena carga; en tanto que el generador que controla la frecuencia puede ser una instalación vieja y poco eficiente ya que solo genera una fracción pequeña de la carga total del sistema. Otra de sus ventajas es su sencillez y la facilidad de operación, pero en determinadas instalaciones presenta serias dificultades; tal es el caso de en que en el sistema existan líneas que enlazan dos áreas y cuya capacidad de transmisión puede verse sobrepasada cuando la planta que controla la frecuencia trate de absorber las variaciones de carga que se producen en otra área. Este sistema de control es el que se ha usado de forma tradicional, fundamentalmente en sistemas pequeños. • El control de frecuencia constante por las líneas de enlace prioriza la transferencia de potencia por estas líneas y controla que no se sobrepase un límite previamente establecido. • El control de frecuencia selectivo combina las ventajas del control de frecuencia constante y del control de potencia constante por las líneas de enlace. Consiste en un dispositivo que se incorpora a los gobernadores de velocidad de las máquinas que llevan el control de la frecuencia y que responde a las variaciones de frecuencia a la vez que es sensible a la potencia transferida a través de la línea. 11 Capítulo II _________________________________________________________________________ 2.3 Acciones y medios para mantener la frecuencia. 1. Regulación Primaria de frecuencia (RPF): El control de frecuencia en un primer nivel la realizan los gobernadores de velocidad de los motores primarios de los generadores de acuerdo a su estatismo. Es la acción para mantener el balance carga-demanda que se realiza en los primeros 30 segundos después de dicho balance se ha roto. No restablece la frecuencia inicial. 2. Regulación Secundaria de frecuencia: Es la acción manual o automática sobre los gobernadores de velocidad de una o más máquinas, para compensar la desviación final de la frecuencia resultante de la RPF. 3. Regulación terciaria de frecuencia: Distribuye la generación, desde el Despacho Nacional de Carga (DNC), en función de las características de cada maquina, con criterios técnico económicos definidos con antelación, bajo la premisa de operar con la frecuencia nominal. En países de gran extensión, debido a la interconexión de diferentes sistemas de compañías privadas, entre las cuales existen contratos que obligan a transferir determinados valores fijos de potencia por los enlaces, el proceso de control de la frecuencia debe asegurar que las variaciones de potencia necesarias a efectuar para el control también mantengan constantes los intercambios por esas líneas. Lo antes mencionado obliga a efectuar un control de frecuencia entre diferentes zonas manteniendo constante los intercambios entre ellas, en estos casos el control secundario debe producirse solo en aquella zona en que ocurre la variación de la carga. 2.4 Consideraciones generales sobre la caracterización de las cargas. Un sistema electroenergético alimenta un número apreciable de consumidores, cuyas demandas forman la carga total del mismo. La naturaleza de esta carga es extremadamente variada; dentro de esta compleja variedad existen algunas que por su amplia difusión forman la mayor parte del consumo de la energía generada y cuyas características influyen sensiblemente en la operación del sistema. Los motores de inducción forman el 50% de la demanda total del sistema, en tanto que la carga de iluminación y sus similares representan alrededor del 40% del 12 Capítulo II _________________________________________________________________________ total, del mismo modo que las perdidas oscilan entre un 10-13%. En forma general, la carga del sistema se pude dividir en dos grupos: las asincrónicas y las de iluminación, en dependencia de la zona o área donde se estudie; ya que en una región industrial predominan las cargas asincrónicas, en tanto que en las ciudades son las de iluminación las de mayor proporción. Las luminarias corrientes tienen un consumo que es independiente de la frecuencia, aunque en las descargas gaseosas la potencia disminuye de 0.5-0.8% si la frecuencia aumenta en un 1%. Sin embargo, la alteración de la potencia frente a las variaciones de frecuencia esta en función casi por completo de los componentes asincrónicos. La caracterización de la carga del Sistema para los estudios del control de frecuencia debe comenzar con la comprobación del carácter estacionario de las variaciones de la potencia activa en períodos de poca variación de la carga, que permita utilizar modelos de análisis espectral en el cálculo de las desviaciones aleatorias y al mismo tiempo considerar despreciables los transitorios que se produzcan, o sea que la suma de la potencia activa generada en el sistema se corresponde con la suma potencia de la carga más las pérdidas. De igual forma deben determinarse, además, las variaciones monótonas de la carga en diferentes horarios del día para diferentes períodos del año. Adicionalmente debe determinarse la influencia de las cargas no conformes en el sistema, tales como acerías, sistemas industriales que utilizan grandes convertidores CD a CA etc. La caracterización de la carga debe proyectarse para períodos de varios próximos años. Si se conoce el pronóstico del gráfico diario de cargas, es posible estimar las máximas variaciones de la carga en períodos de 5 minutos para ser cubiertas por las unidades que efectúan el control de la frecuencia. 13 Capítulo II _________________________________________________________________________ 2.5 Liberación de carga por baja frecuencia. Después de un disturbio severo en el Sistema se pueden producir salidas de unidades en cascada y el surgimiento de áreas, formándose zonas eléctricas aisladas. Si una de estas áreas aisladas tiene deficiencia de generación, experimentará una disminución de la frecuencia cuyo valor se verá principalmente influenciado por las características sensitivas de las cargas con respecto a la frecuencia En muchas situaciones, la desviación de la frecuencia puede alcanzar niveles que podrían llevar, incluso, al disparo las protecciones de baja frecuencia de los generadores, lo que agrava aún más la situación. Para prevenir situaciones como la descrita, se emplean esquemas de liberación de carga para reducirla un nivel que pueda satisfacerse de manera segura con la generación disponible. 2.6 Bases para la selección de esquemas de liberación de carga. Las consideraciones que se toman para seleccionar el esquema de liberación de carga incluyen el déficit de generación máxima para la cual requiere protección, la frecuencia mínima permisible, las áreas que podrán ser separadas del sistema, y el rango para las constantes de inercia M y la constante de amortiguamiento de carga D. Un esquema típico de liberación de carga en tres pasos es: 1. El 10% de carga liberada es cuando la frecuencia cae hasta 59.2 Hz. 2. El 15% de carga adicional cuando la frecuencia cae hasta 58.8 Hz. 3. El 20% de carga adicional se libera cuando la frecuencia alcanza 58.0Hz. El tiempo típico de operación está en el rango de 0.1 a 0.2 segundos. Un esquema basado solo en la disminución de frecuencia es generalmente aceptable para deficiencias de generaciones mayores a 25%. Para déficit de generación superior, un esquema que tome en cuenta tanto la disminución de frecuencia como la razón de cambio de la misma provee una mayor selectividad para prevenir la salida de carga innecesaria. En la figura 2.1 se muestra la lógica de un esquema que emplea un relé de tendencia de frecuencia. 14 Capítulo II _________________________________________________________________________ Figura 2.1: Lógica de disparo para un relé de tendencia de frecuencia. 15 Capítulo III _________________________________________________________________________ CAPITULO III “Control de generación en sistemas eléctricos de potencia”. 3.1 Control de generación. Un sistema eléctrico de potencia se compone de tres partes principales: las centrales generadoras, el sistema de líneas de transmisión y las redes de distribución. Las líneas de transmisión conectan a las centrales generadoras con las redes de distribución. Una red de distribución conecta las cargas de una zona determinada con las líneas de transmisión. Las centrales generadoras suministran potencia eléctrica a las cargas conectadas al sistema de potencia. Si existe un equilibrio entre la potencia suministrada por las centrales generadoras y la potencia demandada por las cargas, las unidades generadoras operan a una velocidad constante (aceleración nula) y con esto el sistema opera a un valor de frecuencia también constante. En un sistema ocurren diferentes tipos de disturbios, entre los que figuran los cambios en las cargas, lo que hace que la potencia que demanda la carga esté cambiando de forma aleatoria: otro tipo de disturbio es la salida imprevista de unidades generadoras; lo que provoca desbalances entre la generación y la demanda. Un desequilibrio de este tipo se refleja en un cambio de energía cinética en las unidades generadoras, que se manifiestan como una aceleración en sus rotores. Al cambiar la velocidad en las unidades generadoras cambia también la frecuencia de operación del sistema, por lo que se hace necesaria la implementación de algún tipo de control en la generación que compense tales desequilibrios de potencia y que permita mantener la frecuencia de operación del sistema dentro del rango establecido. Todas las unidades que suministran potencia a la red eléctrica deben generarla a la misma frecuencia, respetando una misma secuencia de de fases para poder sincronizarse y constituir los grandes sistemas. 16 Capítulo III _________________________________________________________________________ 3.2 El gobernador de velocidad en estado estable. El motor primario de un generador carece de por sí de un sistema de control de potencia, por lo que es necesario incorporarle un dispositivo que realice esta función: el gobernador de velocidad, el que es sensible a los cambios de velocidad, producto a los cambios en la potencia del sistema motor generador. El verdadero control de carga se lleva a cabo por la acción de la válvula de regulación de entrada de energía (vapor, agua). Esta válvula, sin embargo, a su vez, está controlada por el regulador de velocidad. Con el objetivo de analizar el control de frecuencia se hace imprescindible interpretar adecuadamente la operación del gobernador de velocidad tanto en el estado estable como en el dinámico. El esquema básico de un gobernador de velocidad se muestra en la Figura 3.1. En él se pueden observar sus elementos fundamentales asociados al esquema simple del regulador centrífugo de Watt. Las operaciones básicas del gobernador centrífugo clásico de Watt son las siguientes: Si la velocidad del generador se incrementa los contrapesos del regulador de Watt se separan y el punto B desciende. Si se considera, como en realidad ocurre, que el punto A es fijo en esta primera acción, el punto C desciende arrastrado por B. Igualmente, inicialmente el punto E también es fijo, por lo que D de la válvula piloto también desciende. El movimiento de D hacia abajo permite que el aceite a presión penetre en la válvula piloto y desplace el pistón del cilindro hacia arriba para limitar la entrada de vapor a la turbina. Esta acción, reduce la potencia mecánica, lo que hace que la velocidad del sistema-turbina generador disminuya. Sin embargo, debido a la inercia en el sistema turbina-generador, el proceso de desaceleración no es instantáneo y puede tomar un tiempo relativamente alto, y se corre el peligro de realizar una sobre corrección, o sea cerrar demasiado la entrada de vapor. Este proceso puede desencadenar la inestabilidad del sistema. 17 Capítulo III _________________________________________________________________________ Figura: 3.1 Gobernador de velocidad servo asistido. Para evitar que esto ocurra, tan pronto como el punto E suba, el punto D debe subir también, para cerrar la válvula piloto. La acción del operador sobre PC permite regular la válvula de entrada de combustible. Por ejemplo, para aumentar la generación (el incremento debe compensarse con una disminución de potencia similar en otra máquina), el operador traslada el punto A hacia abajo, lo que realiza por medio de un pequeño motor asociado al tornillo sinfín. Como en esta acción la carga no varió, la frecuencia se mantiene constante y por tanto B permanece fijo por lo que C sube y D baja y con ello permite incrementar la entrada de vapor a la turbina. 18 Capítulo III _________________________________________________________________________ En operación estable (carga y frecuencia constante) ambos conductos de la válvula piloto deben permanecer cerrados, de lo contrario habría movimiento en el punto E y por tanto no se alcanzaría el estado estable. 3.3 Modelación del gobernador de velocidad. El modelo lineal del gobernador de velocidad en un punto dado, se realiza considerando las posiciones que se muestran en la Figura 3.1 Las relaciones entre los incrementos ∆PC , ∆ω, ∆x A , …, ∆x E ,se establecen teniendo en cuenta que A, B y C están en línea recta, o sea D está fijado pr las posiciones de A y B. Para pequeñas variaciones de se tiene que: ∆xC = k B ∆x B − k A ∆x A (3.1) k ∆ω − k 2 ∆PC = 1 El factor geométrico kB se incorpora a mecanismo de los contrapesos ( ∂ x B El factor geométrico ( ∂x A kA / ∂ω k1 junto con la sensibilidad del ). se incorpora a la constante k 2 , junto con el factor escala / ∂PC ). Dado que los puntos C, D, y E se localizan sobre la misma línea recta, la posición del punto D depende de las posiciones de C y E. Al linealizar, se obtiene la siguiente relación: ∆x D = k 3 ∆xC + k 4 ∆x E donde k3 y (3.2) k 4 son positivas. 19 Capítulo III _________________________________________________________________________ En el diagrama del gobernador interesa la relación entre entrada ∆x D y la salida ∆x E . Resulta más simple considerar que no hay conexión entre los puntos D y E. Si se presiona ligeramente el punto D se abrirán los conductos de circulación del aceite a presión y el pistón principal se eleva. De igual forma para simplificar se supone que la velocidad del aceite es proporcional a ∆x E depende de ∆x D ∆x D . Por lo tanto y d∆x E = − k 5 ∆x D dt donde la constante positiva k5 (3.3) depende de la presión del aceite y de la geometría del servomotor. El proceso transitorio comienza en t =0 con el sistema en el punto de operación. − En ese caso ∆x E (0 ) = 0 . Al aplicar la Transformada de Laplace, se tiene que: ∆xˆ E = − El circunflejo ( k5 ∆xˆ D s (3.4) x̂ ) indica la transformada de Laplace del incremento. Al combinar las ecuaciones (3.1), (3.2) y (3.4) se obtiene el diagrama de la Figura 3.2. Mediante la simplificación y por medio de las relaciones del diagrama de bloques se llega a: 20 Capítulo III _________________________________________________________________________ Figura: 3.2 Diagrama de bloque del gobernador de velocidad. ∆xˆ E = k 3 ( − k5 − k 2 ∆ PˆC + k1∆ω̂ s + k 4 k5 k 2k3k5 = s + k4k5 ⎛ ˆ k ⎜⎜ ∆ PC − 1 ∆ ω̂ k2 ⎝ ) ⎞ ⎟⎟ ⎠ (3.5) KG ⎛ ˆ 1 ⎞ P ∆ − ∆ ω̂ ⎟ ⎜ C = 1 + TG s ⎝ R ⎠ donde KG = k 2 k3 k4 , TG = 1 k4 k5 y R = k2 k1 . La función transferencial de la ecuación (3.5) tiene una forma de constante de tiempo TG con ganancia K G , y una constante de regulación R . Un valor típico de TG es de 0.1 segundo. 21 Capítulo III _________________________________________________________________________ Un modelo más simplificado de la turbina que relaciona los cambios en la salida de la potencia mecánica ( ∆PM ) con los cambios de la posición de la válvula de vapor ( ∆xE ) se muestra en la Figura 3.3. La constante de tiempo TT esta en el rango de 0.2-2.0 seg. Figura: 3.3 Diagrama de bloque del sistema generador turbina. Este diagrama de bloques se puede integrar y aparece como se muestra en la Figura 3.4. Figura: 3.4 Diagrama de bloque del sistema gobernador-turbina. 22 Capítulo III _________________________________________________________________________ Las características estáticas de velocidad contra potencia del sistema gobernadorturbina se muestran en la Figura 3.5, donde R (Hz/MW) es el estatismo del sistema e indica la variación de la frecuencia en función de la variación de la carga PM . Como se puede deducir, esta relación se define mediante ∆PM = ∆PC − 1 ∆ω R (3.6) Figura 3.5: Curvas estáticas de velocidad contra potencia. 23 Capítulo III _________________________________________________________________________ 3.4 Control general del sistema motor – generador. Las dos variables más importantes en el proceso de control de la generación, la entrada de vapor a la turbina y la corriente de excitación del generador, de forma general se analizan de forma independiente y sus lazos de regulación se consideran que no interfieren entre sí. El modelo de la máquina sincrónica es bien conocido por lo que su estudio se omite en este informe, sin embargo, resulta de interés un análisis integral de ambos, no solo por lo que representa para el sistema motor-generador, sino por su influencia sobre la demanda al incidir directamente sobre las cargas en los procesos transitorios. La figura 3.6 muestra un esquema general de los componentes que conforman el control de un sistema motor-generador a planta. Nótese que PC y Vref son entradas primarias al sistema, PC se establece para minimizar los costos de combustible. Las oscilaciones que aparecen en el Sistema Eléctrico se producen debido a las variaciones de las cargas, salidas de generadores o contingencias en líneas de transmisión y transformadores. Estas perturbaciones pueden aparecer en los sistemas como oscilaciones electromagnéticas con duración de unos cuantos milisegundos (dinámica rápida) y las oscilaciones electromecánicas (dinámica lenta), con duración de algunos segundos. La presencia de las oscilaciones ha sido considerada como un problema importante en la operación de los sistemas eléctricos de potencia, para asegurar la confiabilidad del suministro. Durante los procesos transitorios la interrelación entre los efectos de la frecuencia y el voltaje se hacen más fuerte, por lo que resulta de gran utilidad contar con un dispositivo que refleje esta situación en los lazos de regulación del sistema motorgenerador. Este dispositivo es el Sistema Estabilizador de Potencia (PSS). El objetivo del PSS es proporcionar una señal que ayude a operar en forma robusta a la máquina, a pesar de los posibles cambios en el voltaje o la carga, por cambios en la estructura de la red y perturbaciones severas. Es un elemento que provee una entrada adicional al regulador de voltaje para mejorar el 24 Capítulo III _________________________________________________________________________ comportamiento del sistema, reduciendo las oscilaciones y eliminando los efectos del amortiguamiento negativo causado por el regulador de voltaje. Algunas de las señales de retroalimentación utilizadas generalmente para el PSS son la velocidad, la frecuencia y la potencia eléctrica. En este esquema la señal que utiliza es la velocidad. Figura 4.9: Orden físico de los elementos de control de una planta. 3.5 Las Plantas Diesel como reguladores del voltaje y la frecuencia. El desarrollo de la tecnología alrededor de las plantas diesel, tanto en la parte del motor como en la del generador, ha posibilitado que estas plantas se hayan adueñado de un escenario que hace apenas 10 o 15 años no tenían. Como plantas de emergencia se han consolidado de forma acelerada dadas las exigencias actuales de continuidad de servicio que se ha hecho indispensables en instalaciones industriales y del sector terciario. Una de las características que más ha favorecido su inclusión dentro de los sistemas eléctricos de potencia ha sido el constante incremento de su potencia. Hoy es común encontrar grupos de una potencia de más de 30 MW (en la actualidad se está construyendo entre la MAN y la Hitachi un grupo de 57 MW). Esta realidad ha hecho que se considere esta opción de generación con más fuerza, sobre todo en sistemas eléctricos pequeños, aspecto este que hace 25 Capítulo III _________________________________________________________________________ sólo unos años era impensable, o sea, las plantas diesel cada día aumentan más su presencia en el sector de la generación de los sistemas eléctricos. Cuando las plantas diesel se destinan para dar servicio a un sistema aislado, sus mecanismos de control son capaces de mantener de una forma muy precisa los parámetros de voltaje y frecuencia, dentro de los valores nominales, ya que tanto uno como el otro disponen de la más moderna tecnología con microelectrónica de punta que los hace extremadamente seguros, eficientes y confiables. Esta realidad hace que su servicio sea altamente valorado. Esta forma de operación puede extenderse hasta la implementación de baterías o conjuntos de grupos que una vez sincronizados entre sí, de forma automática se distribuyen la carga, ajustan la frecuencia y el voltaje, producen arranques y paradas automáticas de grupos en función de la demanda, etc. Sin embargo, en la actualidad la tendencia más frecuente entre los diseñadores de estos grupos, cuando se incorporan a grandes sistemas eléctricos, es la de compartir sólo la generación sin participar en el control de los parámetros de operación de los sistemas, o sea, aportan una potencia fija (activa y reactiva) independientemente de los valores que tomen el voltaje y la frecuencia, lo que en términos de operación de sistemas se identifica como operación como nodos PQ. La experiencia de explotación de las baterías incorporadas a las redes de subtransmisión indica que muy frecuentemente los voltajes en sus nodos se han elevado por encima de los valores máximos permisibles y su entrega de potencia reactiva se ha mantenido constante. 26 Conclusiones _________________________________________________________________________ CONCLUSIONES: • En la actualidad las plantas diesel han ido ganando un lugar cada vez más firme como generadores de energía eléctrica no solo como plantas de emergencia sino como apoyo a la generación en los sistemas eléctricos de potencia, sobre todo en sistemas pequeños. • Los modernos sistemas de control de la generación de las plantas diesel han posibilitado que las mismas mantengan los principales parámetros de operación dentro de los valores establecidos con una elevada calidad. • Las plantas instaladas en el SEN sólo son adecuadas para participar en la entrega de potencia activa y reactiva, pero no para formar parte del sistema de control de los parámetros del SEN (voltaje y frecuencia). Actúan como nodos PQ. • En la operación de los grupos instalados en baterías se ha podido comprobar la gran ayuda que representarían los mismos para participar en el control del voltaje, o sea, que pudieran operarse como nodos PV. • En una formación con potencias mayores su contribución al control de la frecuencia representaría una ayuda apreciable al control de la carga y generación del SEN. 27 Recomendaciones _________________________________________________________________________ RECOMENDACIONES: A partir de los resultados obtenidos en esta investigación y de las conclusiones expuestas se proponen las siguientes recomendaciones: • Hacer un estudio más profundo y detallado respecto a la operación de estas pequeñas plantas en conjunto con las demás centrales térmicas del SEN y continuar buscando la forma de incorporarlas al sistema de control de la frecuencia y el voltaje. 28 Bibliografía _________________________________________________________________________ BIBLIOGRAFIA: 1. A.J. Word, B. F. Wollenberg, “Power Generation, Operation, and Control”, John Wiley & Sons, 1996. 2. Arthur R. Bergen, V. Vittal, “Power System Analysis”, Second Edition. Department of Electrical Engineering and Computer Sciences. Iowa State University, Ames. United States, 2000. 3. G. Arroyo, F. Abortes, “Análisis de redes en la Operación de Sistemas Eléctricos Longitudinales. Parte II. Aplicaciones”, CFE Centro Nacional de Control de Energía. 4. Leonardo Casas Fernández, “Sistemas Electroenergéticos”, Parte II, Universidad Central de las Villas, Villa Clara, Cuba ,1978. 5. M. C. Esperón, “Control Jerárquico de la Frecuencia en Sistemas Eléctricos Interconectados”. Tesis de Maestría, CINVESTAV, México, Octubre, 2004. 6. N. Cohn, “Control of Generation and Power Flow on Interconnected Systems”, Wiley, New York, 1996. 7. P. kundur, “Power System Stability and Control”, McGraw-Hill, 1994. 8. Unión Nacional Eléctrica (UNE), Informe de Diapasones Definitivo 1: ”Algunas consideraciones generales para el informe definitivo del calculo de diapasones de potencia necesarios para el control de frecuencia en el año 2008”, Cuba, 2006. 29 Bibliografía _________________________________________________________________________ ANEXO 1: Rectificador del sistema de excitación (Modelo AC5A). Existen varios modelos del sistema de excitación de un generador sincrónico. A continuación se representa la figura A1 una versión simplificada de un modelo de la firma Hyundai, este regulador es alimentado por una fuente que actúa como un imán permanente, el regulador no se ve afectado por los disturbios del sistema. Este modelo de regulador puede ser usado como un pequeño sistema de excitación. Figura A1: Representación simplificada del rectificador del sistema de excitación, (modelo AC5A). Los valores de las constantes de tiempo que comúnmente se utilizan en este tipo de regulador son los que se muestran a continuación: Unidad de referencia: (Modelo de la excitación: IEEE Std. 421.5: tipo AC5A: adaptado por UNITROL 1000). Constante de tiempo filtrada a la entrada del regulador (TR) [seg.] = 0.02 Constante de tiempo amplificada del regulador (TA) [seg] = 0.2 Ganancia del circuito estabilizado del regulador (KF) = 0.12 30 Bibliografía _________________________________________________________________________ Constante de tiempo del circuito estabilizado del regulador (TF1) [seg.] = 1.2 Constante de tiempo del circuito estabilizado del regulador (TF2 ) [seg.] = 0.582 Constante de tiempo del circuito estabilizado del regulador (TF3) [seg.] = 0.29 Ganancia del regulador (KA) [p.u.] = 1000 Ganancia de la excitación (KE) = 1.0 Constante de tiempo de la excitación (TE) [seg.] = 0.582 Saturación de la excitación (SEMAX) [p.u.] = 0.86 Saturación de la excitación (SE.75) [p.u.] =0.5 Valor máximo de VR (VRMAX) [p.u.] = 14.14 Valor mínimo de VR (VRMIN) [p.u.] =-12.02 Razón de voltaje de excitación (EFDFL) [p.u.] = 5.60 Constante de tiempo del regulador (TA1) [seg.] = NA Constante de tiempo del regulador (TA2) [seg.] = NA Constante de tiempo de retardo de la señal interna (TB) [seg.] = NA Factor de carga rectificado (KC) [p.u.] =0.00 Constante de tiempo de la señal de entrada de la carga (TC) [seg.] = NA Valor máximo de VI (VIMAX) [p.u.] = NA Valor mínimo de VI (VIMIN) [p.u.] = NA. 31