Diapositivas tema 1 Archivo
Anuncio

Extracción de Señales - Tema 1
Profesora: Ana Laura Badagián
I.
II.
III.
IV.
V.
Descomposición de una serie de tiempo.
Análisis espectral univariante.
Introducción al análisis de Fourier.
Estimaciones del espectro poblacional.
Introducción al análisis espectral multivariado.
James D. Hamilton, (1994):
Time Series
Analysis, Chapter 6: Spectral Analysis, pp:
152-179. Princeton University Press, New
Jersey
Las razones para desagregar una serie de tiempo
económica en sus componentes inobservables se
explicitan al inicio del capítulo 4 del libro de Espasa y
Cancelo (1993):
“El análisis de la coyuntura de un fenómeno
económico normalmente no se realiza directamente a
través de la evolución de sus datos originales, ya que
éstos contienen muchas oscilaciones de escaso
interés económico que pueden llevar a conclusiones
equivocadas. Por el contrario, dicho análisis se
efectúa a través de señales extraídas de los datos,
que sirven de estimación de lo que un analista puede
considerar como un aspecto esencial del fenómeno
en cuestión.”
Los datos originales de una serie económica
presentan grandes oscilaciones, muchas de las
cuales no son de interés desde el punto de vista
del análisis económico. Así, los aspectos
esenciales de un fenómeno económico no son
directamente observables, con lo cual es
necesario disponer de procedimientos que
permita cuantificarlos a partir de la información
disponible (los datos originales). Al analista
corresponde definir cuál o cuáles componentes o
señales son de interés.
Los componentes inobservables de una serie temporal son
básicamente:
a)
El componente tendencial o tendencia, Tt , que recoge
aquella parte de la evolución de la serie que se encuentra
relacionada con factores de largo plazo (persistentes).
b)
El componente estacional, St , se encuentra asociado a
las oscilaciones cuasicíclicas que se cancelan al interior
del año (12 meses, 4 trimestres, etc.).
c)
El componente cíclico, Ct , que recoge las fluctuaciones
cuya periodicidad es mayor al año, pero inferior al "largo
plazo“.
d)
El componente irregular, It , cuya estructura es aleatoria y
contiene las oscilaciones no sistemáticas que afectan
puntualmente a la serie considerada. Se suele caracterizar
este componente como un proceso estocástico ruido
blanco.
La serie observada surge, entonces, de la
agregación de los cuatro componentes. El formato
de la agregación depende de que el modelo
subyacente
sea
aditivo
o
multiplicativo,
respectivamente. Así, en el caso aditivo:
Yt = Tt + Ct + St + It ,
mientras que en el multiplicativo,
Yt = Tt . Ct . St . It .
El componente inobservable sobre el que el analista
concentra su atención suele denominarse señal de
interés.
Desde el punto de vista metodológico, existe un
incentivo por utilizar procedimientos que tengan
propiedades conocidas y deseables desde el
punto de vista teórico para analizar las
fluctuaciones macroeconómicas. Este aspecto
implica
contar
con
procedimientos
de
descomposición
que
especifiquen
las
características del componente que se desea
estudiar y que sea posible su estimación a partir
del análisis de los datos originales.
Extracción de señales es una expresión tomada del
campo de la ingeniería: los sistemas de audio tienen
un parámetro, el denominado “coeficiente de señalruido”, que define la calidad de los sonidos emitidos).
En este campo, la extracción de señales se realiza a
partir de un sistema que filtra la “señal de interés” (la
música) eliminando el ruido (distorsiones que afectan
al sistema de audio).
El punto de partida de los procedimientos de extracción
de señales es, entonces, que en la práctica la
información que proporciona la observación y medición
de un fenómeno (económico) se encuentra
contaminada. Por ello, es necesario “filtrar” los datos
de modo de recuperar la “señal” que ellos contienen.
Observación: La señal “pura” nunca se observa, por lo
que siempre se está expuesto a cometer errores.
El tema metodológico planteado no es en absoluto trivial
y se traduce básicamente en un problema de filtrado de
los datos originales.
Un filtro es una combinación lineal de las observaciones
(originales) de una variable para distintos momentos del
tiempo, que se realiza con la finalidad de obtener una
estimación de una señal "deseada" por el analista.
Su aplicación siempre distorsiona el proceso original al
que se aplica. Muchas veces dichas distorsiones no son
precisamente
“deseadas”,
pudiendo
conducir
a
interpretaciones equivocadas sobre el comportamiento de
la variable analizada y a estimaciones sesgadas de sus
componentes inobservables. Por esta razón, resulta
importante contar con herramientas que permitan analizar
las propiedades estadísticas de dichas transformaciones.
La dependencia temporal en series económicas puede estudiarse
en el dominio del tiempo o en el dominio de la frecuencia.
En el primer caso, es necesario partir explicitando el proceso
estocástico que genera los datos como la suma de un
componente sistemático y una perturbación aleatoria
impredecible. La parte sistemática suele formularse como una
simple combinación lineal de observaciones y perturbaciones
pasadas, mientras que la parte impredecible se asimila a un
proceso estocástico ruido blanco.
El análisis en el dominio de la frecuencia, o análisis espectral,
interpreta el proceso estocástico de manera que el
comportamiento en el tiempo de la variable es el resultado de la
combinación (adición) de ciclos de distinta amplitud y duración.
El análisis espectral permite estudiar de qué forma las
diferentes periodicidades o frecuencias contribuyen a la
explicación de la variabilidad total de la serie.
Si bien los dos tipos de análisis aportan la misma
información sobre la serie observada desde diferentes
perspectivas, algunos aspectos del comportamiento de la
serie pueden visualizarse más fácilmente en el dominio del
tiempo y otros en el de la frecuencia.
El enfoque tradicional para el tratamiento de las series
económicas ha sido en el dominio del tiempo. No
obstante, la utilización del análisis espectral se revela
como más conveniente cuando el analista enfrenta un
problema que requiere la estimación de uno o varios de
los componentes inobservables.
Por un lado, cada procedimiento de descomposición
implica la aplicación de diferentes filtros o
transformaciones de los datos originales, los cuáles
tienen fuertes consecuencias en cuanto a la
atenuación de algunos ciclos o al realzamiento de
otros, siendo relevante analizar sus efectos, de modo
de no arribar a conclusiones erróneas respecto a la
señal de interés.
El análisis espectral proporciona las herramientas
para conocer cómo son afectadas las series en este
sentido, aportando información relevante acerca de
los efectos de los filtros que se aplican a series de
tiempo macroeconómicas.
Por otro lado, el análisis del comportamiento cíclico
de una serie macroeconómica en el dominio del
tiempo oculta un conjunto de influencias económicas
que provienen de ciclos de diferentes amplitudes y
longitudes, que pueden evidenciarse realizando la
descomposición de las fluctuaciones en diferentes
frecuencias cíclicas.
El nexo entre el dominio del tiempo y el análisis
espectral es la función generatriz de autocovarianzas,
cuyo análisis constituye la base para el estudio de las
propiedades cíclicas de las series de tiempo. La
función de autocovarianzas y/o la función de
autocorrelaciones contienen toda la información
sobre la dependencia temporal de una serie de
tiempo. En el dominio del tiempo la autocovarianza
de orden τ , que se anota γτ , se define como
para todo t entero, donde
es un proceso estocástico
real o más particularmente, la serie de tiempo en
estudio y µy su esperanza matemática.
De manera general, una función generatriz registra
la información sobre cierta secuencia.
Dada la secuencia ,
, posiblemente
compuesta por infinitos términos, la función
generatriz de dicha secuencia se define como:
La
variable
z
no
necesariamente
tiene
interpretación. Puede decirse que ella es portadora
de información sobre la forma en que se genera la
secuencia.
Sea ahora el proceso estocástico real
, cuya
varianza es igual a γ0 y la τ –ésima autocovarianza
igual a γτ .
Se define
como la secuencia de
autocovarianzas. Si dicha secuencia es absolutamente
sumable, la función generatriz de autocovarianzas
está dada por:
donde el argumento de la función, z, es un escalar
complejo.
Bajo tales condiciones, el proceso yt se puede formular a
través de la representación de Cràmer, es decir como la
suma infinita de funciones periódicas -senos y cosenostal que:
Para ω∈[-π,π], donde los coeficientes cω son
Utilizando que
la formulación de
Cramer puede reescribirse de la siguiente forma:
Esta representación de los procesos covarianza
estacionarios provee una forma matemáticamente
rigurosa de expresar la noción de que las series
macroeconómicas contienen componentes asociados con
fluctuaciones de diferentes frecuencias: los movimientos
lentos o de baja frecuencia asociados intuitivamente al
concepto de tendencia, los de frecuencia media que se
vinculan al ciclo, y por último, los movimientos rápidos o
de alta frecuencia relacionados a los factores estacionales
e irregulares.
La pregunta clave es entonces, ¿qué
frecuencias son dominantes y cuáles de
menor importancia para explicar los
movimientos de yt ? Una respuesta sencilla
a dicha cuestión la proporciona la función de
densidad espectral o espectro poblacional.
Usando el Teorema de De Moivre, cualquier número
complejo z puede expresarse como z = cos(ω)-i sen(ω)
= e-iω , donde i =√-1 y ω es el ángulo en radianes que
forma z con el eje real. Si en la función generatriz de
autocovarianzas z es reemplazado por e-iω y se divide
por 2π , la función resultante de ω se denomina función
de densidad espectral o espectro poblacional (o
sencillamente espectro) de yt :
donde -π < ω < π , o puede escribirse como:
Si la secuencia de autocovarianzas es absolutamente
sumable, el
espectro poblacional existe y tiene un
conjunto de propiedades importantes, a saber:
i) Es una función de ω, no negativa, continua y real.
ii) Si las γτ 's representan las autocovarianzas de un
proceso estocástico covarianza estacionario, entonces el
espectro será no negativo para todo valor de ω .
iii) Como cos(ωτ ) = cos(-ωτ ), el espectro es simétrico
alrededor de ω = 0 , de forma que Sy(ω) = Sy(-ω).
iv) Como cos(ωτ + 2π kτ ) = cos(ωτ), para cualquier k y τ
entero, el espectro es una función periódica de ω: S(ω)
=S(ω + 2π k). Así, el conocimiento del valor de S(ω) para
cualquier valor de ω en el intervalo [0,π] implica el
conocimiento de S(ω) para cualquier valor de ω .
De esta forma, el espectro constituye un recurso para
realizar la descomposición de la varianza de una serie por
sus frecuencias. El área debajo del espectro en el intervalo
[-π,π], es igual a la varianza de yt .
Esta propiedad brinda alguna idea sobre la interpretación
de la varianza en el dominio del tiempo, ya que la misma
es la suma del espectro a lo largo de todas las frecuencias
entre -π y π . La varianza de una serie económica se
distribuye desigualmente entre las frecuencias -excepto en
el caso de un proceso ruido blanco-, de forma que el
componente de crecimiento, el componente de ciclo
económico (business cycle) y el componente estacional
contribuyen de manera diferente a la variabilidad de la
serie analizada.
Una formulación más general de lo planteado es:
Así, el espectro de un proceso estocástico contiene la
misma información que la función generatriz de
autocovarianzas, ya que el mismo es simplemente una
combinación lineal de las autocovarianzas. Sin
embargo, la diferencia fundamental es que la función
de densidad espectral arroja luz sobre la importancia
de los componentes cíclicos para diferentes
frecuencias.
Puede definirse una función acotada no decreciente F(ω)
llamada función de distribución espectral que cumple:
donde gy(t ) es la función generatriz de momentos. La
función de distribución espectral determina una medida
F(A), llamada distribución espectral de la serie de tiempo,
donde Sy(ω)=F'(ω) y sobre la banda de frecuencias A se
cumple que
El cociente F(A)/γ0, proporciona información sobre la
contribución de los componentes asociados a las
frecuencias incluidas en A a la varianza del proceso.
Así, al visualizar el gráfico de la función de densidad
espectral de una serie, un pico puede interpretarse
como un indicador de un componente cíclico con un
período o longitud de onda constante e igual a 2π/ω
donde ω es la frecuencia correspondiente.
Algunos casos particulares de un espectro son los
siguientes:
1) Si el proceso generador de los datos es un ruido
blanco el espectro es una recta horizontal. Un ruido
blanco yt=εt , tiene varianza
y autocovarianzas
para
.
Así, la función generatriz de momentos es
el espectro es constante e igual a .
y
El gráfico del espectro de un ruido blanco con varianza 2π
se presenta en la figura 1. Se caracteriza por ser plano en
el nivel
para todas las frecuencias. De aquí viene el
término ruido blanco: así como una luz blanca, consiste en
un número infinito de frecuencias cuyo peso es el mismo.
¿Cuánto es el área debajo de la densidad espectral entre
las frecuencias -π y π?
Cuadro 1: Frecuencias y períodos en series trimestrales y anuales
2π
p=
ω
2) El espectro de una serie trimestral con estacionalidad y
tendencia presenta tres picos marcados en las
frecuencias cero, π/2 y π .
Esto significa en términos de períodos, que los
componentes que se asocian a un período infinito,
anual y dos trimestres son importantes para explicar
la variabilidad total de la serie en cuestión,
respectivamente. Justamente, el período infinito se
asocia a una señal suave o con fluctuaciones lentas
(frecuencia cero), que es característica esencial del
componente de tendencia.
Por otra parte, las series trimestrales estacionales
tienen la particularidad de presentar regularidades o
ciclos que se repiten casi sistemáticamente cada año
y al interior del año cada dos trimestres. Esto es
representado por los picos en las frecuencias π /2 y
π.
Si la serie de tiempo contiene una raíz autorregresiva
unitaria, el pico del espectro será infinito en la frecuencia
cero. Considérese el proceso estacionario AR(1):
con perturbaciones ruido blanco. El espectro del proceso
está dado por:
y es sencillo observar que
Una observación importante es que la frecuencia más alta –
período más bajo- sobre la que se tiene información directa
es π, la que se conoce como la frecuencia de Nyquist. Con
datos trimestrales, no se pueden detectar ciclos con una
mayor frecuencia que dos trimestres, ω = π , problema que
se relaciona con el tema de la agregación en el tiempo o
muestreo.
Este se refiere al proceso por el cual una señal continua se
mide a través de una secuencia de números discretos, por
ejemplo de periodicidad trimestral.
El inconveniente más serio relacionado a esto se denomina
aliasing, e implica que si una serie contiene ciclos con una
frecuencia mayor que la trimestral –por ejemplo, mensual-,
estos serán imputados a ciclos con una frecuencia entre
cero y π.
3) Granger (1966) plantea que la mayoría de las series
macreconómicas anuales presentan una "forma espectral
típica". La misma se exhibe en la figura 3. La característica
más evidente de la forma espectral típica identificada por
Granger es la elevada importancia que adquieren los
componentes asociados a las frecuencias bajas, aún
cuando la tendencia del proceso haya sido previamente
removida.
Este aspecto hace que la función de densidad
espectral univariada no sea por sí sola una
herramienta
“productiva”,
sino
que
debe
complementarse con los espectros multivariados, de
forma de comprender mejor las relaciones entre las
variables económicas.
Previo a la definición de los instrumentos del análisis
espectral multivariado se introducen algunos
conceptos del análisis de Fourier y se plantean
alternativas metodológicas para estimar la función de
densidad espectral.
La idea fundamental del análisis de Fourier es que
cualquier función determinística de la frecuencia ω,
puede ser aproximada por una suma infinita de
funciones trigonométricas, y a esta suma se le
denomina representación de Fourier.
Las funciones trigonométricas cos(ω) y sen(ω) son los
“bloques fundamentales” sobre los que se construye el
análisis de Fourier y la aproximación a toda función
periódica. Ambas son funciones cuyo período es 2π y
por tanto, cualquier combinación lineal de estas
funciones es también periódica de período 2π. Si se
considera una función f(ω) de la forma
donde {at} y {bt} son secuencias arbitrarias de
constantes sujetas a la restricción de que la serie infinita
planteada converja para todo ω, entonces f (ω) será una
función cuyo período es 2π.
Sea ahora
complejos con
una secuencia de números reales o
entonces existe una función definida en los complejos,
f (ω), llamada transformación de Fourier perteneciente al
intervalo [- π,π], tal que:
Una función f(ω) que es de particular interés, es el
espectro Sx(ω), que es la transformación de Fourier del
covariograma y como tal, es una especie de función
generatriz de covarianzas.
Por su parte, la inversa de la transformación de Fourier se
define como:
Por otro lado, si las frecuencias toman T valores igualmente
espaciados en el rango [0,2π], y siendo T el número de
observaciones de xt, entonces el intervalo de muestreo es
2π/T , y usando las frecuencias se tiene que:
el resultado es la transformación de Fourier discreta:
y su inversa:
El espectro poblacional fue expresado en función de la
secuencia
que son los momentos poblacionales de
segundo orden. Sea ahora, un conjunto de T
observaciones
. Se puede calcular hasta T-1
autocovarianzas muestrales a partir de las fórmulas
donde
es la media muestral.
Análogamente al espectro poblacional, se define el
periodograma muestral como
o como
De la misma forma que para el espectro poblacional
El periodograma muestral constituye una forma obvia de
estimar el espectro poblacional. Sin embargo, esta
aproximación presenta serias limitaciones. Sea el proceso
donde la secuencia
es absolutamente sumable
y
es una secuencia de variables aleatorias
independientes y semejantes con
Sea Sy(ω) el espectro poblacional y supóngase que Sy
(ω) > 0 para todo ω . Fuller demuestra que para todo ω≠0
y un tamaño de muestra lo suficientemente grande,
Además, para λ≠ω , la variable
y es aproximadamente independiente de la primera. Dado
que una variable que se distribuye χ2(2) tiene esperanza
igual a 2,
y como Sy(ω) es una magnitud poblacional
De esta forma, si el tamaño de muestra es lo
suficientemente grande, el periodograma muestral
proporciona un estimador aproximadamente insesgado del
espectro poblacional.
Sin embargo, el intervalo de confianza a un 95% para una
variable χ2(2), es (0.05, 7.4), de forma que resulta poco
probable que ^Sy(ω) sea menor que 0.025 y/o mayor que
3.7 veces el verdadero valor de Sy(ω) . La gran amplitud de
dicho intervalo permite establecer que el periodograma
muestral como estimador del espectro poblacional es
insatisfactorio.
Por otro lado, se espera que un estimador mejore a
medida que se utiliza un tamaño de muestra mayor.
Sin embargo, ^Sy(ω) no es consistente, es decir que
no se vuelve “más preciso” a medida que aumenta el
tamaño de la muestra, porque con éste también se
incrementa el número de autocovarianzas a estimar.
Otra desventaja es que tiene una apariencia
“irregular”, aún cuando se refiere a un proceso ruido
blanco, pues el número de frecuencias de Fourier en
un intervalo dado se incrementa de forma
aproximadamente lineal con el tamaño de la muestra
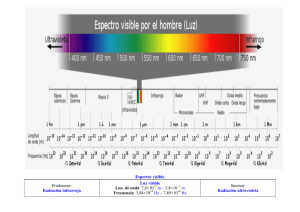
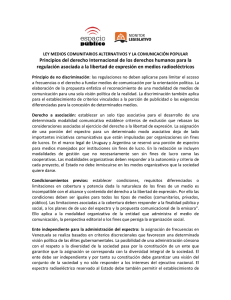
Ejemplo: Serie ci
cit = 0,9cit−1 + εt
εt ≡ N(0,1)
ci0 = 0
€
Periodograma
Muestral de ci
Periodograma de ci (Nro de observaciones = 200)
omega
frec escalada
periodos
0.03142
1
200.00
0.06283
2
100.00
0.09425
3
66.67
0.12566
4
50.00
……………………………………………………………….
3.01593
96
2.08
3.04734
97
2.06
3.07876
98
2.04
3.11018
99
2.02
3.14159
100
2.00
densidad espectral
1.5180
36.339
30.545
2.3750
0.12145
0.0038706
0.010269
0.011944
0.011360
Ejemplo PBI trimestral
Máx: 5 trimestres
A) Estimación paramétrica del espectro
Ya sea en el caso de que el verdadero proceso generador
de los datos sea un proceso ARMA(p,q) o que pueda ser
aproximado por el mismo, entonces los parámetros del
proceso pueden estimarse por máxima verosimilitud y el
espectro teórico puede calcularse a partir de ellos. Este
procedimiento consta de dos etapas básicas. En primer
lugar, se estiman los coeficientes de un proceso ARMA(p,q)
por máxima verosimilitud, donde los valores de p y q se
establecen de forma que el modelo se ajuste lo más
adecuadamente posible al verdadero proceso generador de
los datos
En segundo lugar, se sustituyen los parámetros estimados
φ1, φ2, φp, θ1, θ2, θq y σ2 en la expresión del espectro
donde ω∈[0,π].
Parzen (1969) demuestra que si el modelo ajustado es
autorregresivo puro de orden p
es decir que la varianza del espectro se incrementa con p.
Ello plantea un trade-off entre un mejor ajuste del modelo y
la minimización de la varianza del espectro. Por otro lado, p
no puede ser demasiado pequeño, pues el espectro
estimado puede resultar con un fuerte sesgo.
Berk (1974) muestra que el estimador espectral basado
en la modelización ARMA(p,q) es insesgado,
consistente y asintóticamente normal. Al basarse en un
modelo teórico tiende a ser más suave que el estimado
mediante las técnicas no paramétricas, que se verá a
continuación, y parece mostrar una alta resolución
siendo capaz de seleccionar picos angostos (Priestley,
1981). Aún si el modelo está incorrectamente
especificado, si las autocovarianzas del verdadero
proceso se encuentran cercanas a las de una
especificación ARMA(p,q) este procedimiento debería
proporcionar una útil estimación del espectro
poblacional (Hamilton, 1994).
B) Estimación no paramétrica del espectro
El periodograma muestral tiene una apariencia “irregular”,
pues el número de frecuencias de Fourier en un intervalo
dado se incrementa de forma aproximadamente lineal con
el tamaño de la muestra. Dicho problema se soluciona
mediante la suavización del espectro usando la técnica de
las ventanas espectrales, o en otras palabras,
promediando el periodograma muestral para diferentes
frecuencias.
La estimación no paramétrica del espectro parte del
supuesto de que Sy(ω) se encuentra cerca de Sy(λ)
cuando ω está cerca de λ . Esto sugiere que Sy(ω) podría
ser estimado mediante un promedio ponderado de los
valores de ^Sy(λ) para valores de λ en un entorno de ω,
donde los ponderadores dependen de la distancia entre ω
yλ.
Sea ˆSy(ω) una estimación de Sy(ω) y sea ωj = 2πj/T . La
sugerencia es tomar
donde h representa el parámetro de ancho de banda e
indica cuántas frecuencias {ωj±1, ωj±2,…,ωj±h} son utilizadas
para estimar Sy(ω). Por su parte, los términos
,
denominados ponderadores de kernel indican cuál es el
peso relativo de cada frecuencia, y cumplen que
Existen diferentes tipos de funciones kernel. Una
aproximación que se suele utilizar es
proporcional a
, y como
los ponderadores propuestos son
y el estimador del espectro es
Por ejemplo, si h=2
y el estimador del espectro es
Sˆ y (ω j ) =
2
2 + 1− m ˆ
∑ 3 2 Sy (ω j +m ) =
()
m=−2
1
2
3
2
1
= Sˆ y (ω j−2 ) + Sˆ y (ω j−1 ) + Sˆ y (ω j ) + Sˆ y (ω j +1 ) + Sˆ y (ω j +2 )
9
9
9
9
9
El promedio simple de ^Sy(ω) a lo largo de diferentes
frecuencias puede ser representado de manera
equivalente como sigue (véase, Hamilton, 1994; pág. 166):
con
El periodograma muestral (sin promediar) es un caso
particular del estimador de kernel en el que
.
Los ponderadores
son menores o iguales que uno en
valor absoluto, con lo que el estimador del espectro
planteado subpondera las autocovarianzas
en
relación al periodograma muestral.
Un estimador del espectro bastante popular utiliza la
función kernel de Bartlett modificada, la que está dada
por
El estimador de Bartlett es entonces
Las autocovarianzas de orden mayor a q son tratadas
como si fueran cero o como si Yt fuera un proceso MA(q).
La elección de h, el parámetro de ancho de banda y la
del parámetro q, en general se basa en criterios
subjetivos.
Mientras que el periodograma es asintóticamente
insesgado, aunque con varianza grande, el estimador del
espectro poblacional que se basa en el promedio del
periodograma para diferentes frecuencias tiene menor
varianza, pero introduce algún sesgo.
La severidad del sesgo depende de la rapidez con que
desciende el espectro poblacional y del tamaño del
ancho de banda.
Una forma de elegir h y q podría de esta forma, basarse
en los gráficos del espectro estimado usando diferentes
valores de dichos parámetros y hacer un juicio subjetivo
sobre cuáles son los valores más plausibles.
Ejemplo ci
Ejemplo PBI trimestral
Sea
un proceso estocástico estacionario n-dimensional
con vector de medias
y matriz de autocovarianzas de
orden τ dada por
Resulta fácil demostrar que a diferencia del caso univariado,
Γ(τ ) y Γ(−τ) no tienen por qué ser iguales, pero el elemento
ij-ésimo de Γ(τ ) es igual al elemento ji-ésimo de Γ(-τ ), para
τ = 1, 2,…, de modo que Γ(τ ) = Γ’(-τ ).
Si la secuencia
es absolutamente sumable, la
función matricial generatriz de autocovarianzas, también
denominada función generatriz de covarianzas cruzadas
se define como
donde z es un escalar complejo y
es una matriz de
números complejos de dimensión nxn. Se dice que el
vector de procesos estocásticos
es conjuntamente
covarianza estacionario si
no depende
de t, sino solamente de τ.
De la misma forma que para un proceso univariado, el
espectro multivariado o la función de densidad espectral
cruzada se obtiene sustituyendo en la función generatriz
de autocovarianzas z por e−iω y dividiendo por 2π :
donde ahora Sy(ω) es una matriz de dimensión nxn que
se encuentra conformada por los espectros de cada uno
de los procesos componentes del vector en la diagonal
principal y fuera de ella por los denominados espectros
cruzados.
Así, todos los elementos de la diagonal principal son
reales no negativos, mientras que los restantes
elementos son en general complejos para toda
frecuencia ω.
Por otro lado, al igual que la función matricial generatriz
de covarianzas, el espectro multivariado no es en
general simétrico, sino que el elemento ij-ésimo es el
complejo conjugado del elemento ji-ésimo.
El espectro multivariado, de la misma forma que el
univariado cumple que
es decir que el área debajo del espectro multivariado es
la matriz de varianzas y covarianzas condicionales de yt .
Una generalización de esta propiedad es
El caso bivariado permite apreciar de manera sencilla
estos conceptos. Sea
, donde cada uno de los
componentes del vector son procesos estocásticos
conjuntamente estacionarios, con espectros continuos
para toda frecuencia ω , Sy(ω) y Sx(ω) respectivamente.
La matriz de autocovarianzas del proceso bivariado será:
Γ
El espectro cruzado entre yt y xt se define como:
y la matriz del espectro bivariado es
donde Syy(ω), Sxy(ω) y Sxx(ω) se definen de forma
análoga a Syx(ω).
Por otra parte, usando las relaciones trigonométricas e -iωt
= cos(ωt) - i sen(ωt ), sen(ωt) = -sen(-ωt ) y sen(0) = 0,
resultan las siguientes expresiones:
Los elementos que se encuentran fuera de la diagonal
principal son magnitudes complejas y pueden
reformularse utilizando dos
cantidades reales, el
cospectro, co(ω) y la cuadratura espectral, qu(ω). Por
ejemplo, Syx(ω) puede escribirse como
donde
Estas dos funciones tienen las siguientes propiedades:
El cospectro entre yt y xt para una determinada frecuencia
ω se interpreta como la contribución a la covarianza entre
yt y xt que tienen los ciclos correspondientes a dicha
frecuencia. Resulta fácil observar que el cospectro puede
ser positivo para determinadas frecuencias y negativo para
otras, dado que las autocovarianzas pueden tomar ambos
signos.
La cuadratura espectral desde xt a yt para una cierta
frecuencia ω es una magnitud proporcional a la porción de
la covarianza entre yt y xt causada por los ciclos
correspondientes a la frecuencia ω. Estos ciclos pueden
ser muy importantes para cada una de las variables yt y xt
en forma individual, lo que se refleja en altos valores de
Sy(ω) y Sx(ω) y, sin embargo, no producir una alta
covariación contemporánea entre las variables porque para
un período determinado las dos series se encuentran en
diferentes fases del ciclo.
Las funciones de cospectro y cuadratura espectral se
relacionan con los conceptos de ganancia, fase y
coherencia, que son relevantes en el estudio del ciclo
macroeconómico.
Estos permiten realizar un estudio por frecuencias de la
correlación y el cambio de fase entre los principales
agregados macroeconómicos.
La ganancia se define como
es decir, es el cociente entre el espectro cruzado entre
yt y xt y el espectro de xt . Representa el coeficiente de
la regresión de la serie yt sobre xt para una determinada
frecuencia ω. Así, la función de ganancia mide el
incremento en la amplitud del ciclo correspondiente a
una determinada frecuencia ω de una serie yt dado un
incremento en la amplitud del ciclo correspondiente a la
misma frecuencia en la serie xt .
La función de fase expresada en radianes se define como
Para facilitar su interpretación se suele expresar en
unidades temporales a través de la operación Ph(ω)/ω,
que se anotará ph(ω). Esta función proporciona
información sobre el desfase - liderazgo o rezago- de
una serie respecto a la otra. Si ph(ω) es positiva
(negativa), los ciclos de Y asociados a la frecuencia ω
lideran (rezagan) a los ciclos de X caracterizados por la
misma frecuencia y el valor de dicha función indica por
cuántos períodos es el desfase.
Priestley (1981) y Hamilton (1994) plantean que las
funciones de ganancia y fase se relacionan de la
siguiente forma recomponiendo el espectro cruzado:
Por último, la coherencia entre dos series de tiempo se
define como
donde |.| denota la operación módulo. Es una función real
y cumple que 0 ≤ Coh(ω) ≤ 1. Es una medida del grado en
que dos series yt y xt se encuentran conjuntamente
influidas por ciclos correspondientes a una frecuencia ω.
Indica cómo es el movimiento conjunto de un grupo de
series de tiempo a lo largo del ciclo de negocios y cuán
fuerte es la correlación de las series para diferentes
frecuencias. Un valor próximo a uno (cero) para una
determinada frecuencia ω indica una elevada (escasa)
correspondencia entre las fluctuaciones con período 2π/ω
de las dos series.