5. DISEÑO DE UNIDADES 5.1 FLUJO El control de flujo es
Anuncio

5.
5.1
DISEÑO DE UNIDADES
FLUJO
El control de flujo es importante desde el punto de vista
industrial, para mantener en régimen de operación diferentes equipos (Sistemas de refrigeración, operaciones de separación) y para efectos contables, en los cuales importa
el suministro de ciertos fluidos (gasoductos).
Dinámicamente es un proceso especial, en que la resjjuesta
a cambios en la posición del elemento final de control
(válvula, bomba), es rápida y prácticamente depende de
las demoras en los instrumentos.
(1) Otra caraterística
la constituyen las oscilaciones permanentes debidas a turbulencia, que genera cambios ciclicos en las tomas de presión con lo cual el sistema está sometido a ruidos de alrededor de 1 cps (1).
Esta situación exige la utilización de modos de control
integral proporcional, ajustados en condiciones desfavorables, para disminuir el valor de la ganancia y minimizar
las oscilaciones del instrumento sensor.
17
Un sistema de control de fliij') r^ara el laboratorio de
control debe servir para:
1.
Reconocer la característica de operación Je instrumen-
tos sensores, transmisores, elementos finales y nodo de
control.
2.
Desarrollar capacidad para ajustar un sistema de con-
trol de flujo.
Incluye estudiar aspectos como la influen-
cia de la ganancia y el tiempo integral sobre el .sistema
de control,
3.
Reconocer las características de instalación de los sen-
sores y demás instrumentos.
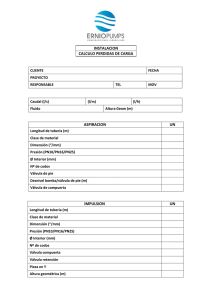
Un ciclo de control de flujo típico, es el mostrado en la
Figura 1.
—
18
1. Elemento
2.
Trcnsmiaor
3.
Controlador
4
Eiemento
Si Elementos
t><I
Sensor
Pinol
Auxiliares
.Flujo
04
'l.-
Y.
PJ^
DISEÑO:
J , A . Gomaz
L.
DIBUJO;
8. M. Hernóndaz B.
ESCALA:
Sin
FECHA:
Septiembre
FACULTAD NACIONAL DE MINAS
LABORATORIO DE CONTROL
AUTOMÁTICO
ELEMENTOS
EN UN
DE
CONTROL
escala
L982
FIGURA
CICLO
v^i. I>
Para cumplir con los objetivos antes mencionados nara el
sisteraa de control de flujo, este debe incluir facilidades para
-
Estudiar la característica de flujo de la válvula de
^
control usada, lo que implica facilidad para determinar flujo a través de la válvula vs. posición del vastago de la misma.
-
Simular caunbios de carga, esto es, TX)der introducir
perturbaciones al sistema, abriendo o cerrando un canal adicional de flujo.
Calibrar el elemento sensor usado utilizando para el
'i
efecto un Instrumento indicador de flujo instantáneo.
Registrar el flujo para totalizarlo.
'
-
.
•
•
•
•
.
•
'
:
.
Controlar mediante modos P
'
'
•
:
.
•*- I
(Proporcional -^ Integral).
Tales condiciones se pueden lograr con un sistema como el
mostrado en la Figura 2.
19
o
</)
<
O
m
Ol
3
3
C
O
k.
S
c
m
o
>
>
o
E
k.
*—
•> o
c c
3
o
•
o
o
•
•
•o
c
o
•
E
o.
o
o
03
•
oc
.Q
3
O
u
«)
F
IO
^
o
«i
IO
<S1
O
o
:k Q:
tu I o
-J o O
8
•o
<
1-
z
<
t í
o
o
c
" 3
Ol
<
•0
c
-o
u
o
c
•
E
ÍE
O)
n
o
tr
o
Ui
CU
o
o:
hz
o
o
ü
H<
Z
O
1-
<
a:
O
Ul
Q
<
H; r>
<
<
=)
O
ffi
UJ
H-
n
<
lll
ii.
<
fLl ü
z
3
o
z
•
«1
OB
a
2
X
o
o
u
•
<
-«
Z
<^
c
«0
j^
d
<
8
E
•o
O
1
»g
c
•
-»
z»
m
a
<
o
co
•
xa
R
•
^*
a.
•
co
<
X
o
UJ
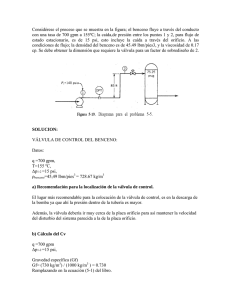
Para facilitar la instalación, la medición y loarar un
circuito cerrado para economizar agua, la cual es el
fluido de trabajo seleccionado por su disponi':ilidad,
facilidad de manejo y seguridad, se escogió la disposición mostrada en la Figura 3, la cual también involucra economía de espacio.
•
:>•
30
FACULTAD NACIONAL DE MINAS
DiSEfio;
J. A. Gómez
DIBUJO:
G. M Hernández B.
ESCALA
L,
LABORATORIO DE CONTROL
AUTOMÁTICO
SISTEMA DE CONTROL DE FLUJO
I : 25
DISPOSICIÓN
f'ECHA
Septiembre
1.982
FIGURA
5.1.2
Cálculo y Selección de instrumentos y equipos.
Para realizar estos cálculos se buscó como punto de partida el cálculo del elemento sensor de flujo (primario) y
a partir de el y con base a la distribución mostrada en la
Figura 3, se calcularon y seleccionaron los demás componentes.
5.1.2.1
Elemento primario:
Entre los elementos primarios usados para control de flujo,
se encuentran disponibles en el mercado para líquidos: Rotámetros, orificios, venturis, medidores de turbina, medidores magnéticos, medidores sónicos, medidores tipo vórtice de líquido y medidores de bola oscilante, para bajas
presiones de trabajo.
De ellos el más económico (por menor costo de inversión) y
el más flexible, es el medidor de orificio, que aunque dinaunicamente presenta comportaraiento no lineal, se ha constituido en el medio más usado industrialmente para la medición de flujos. Por tal razón se seleccionó como elemento
primario para ser usado en el laboratorio.
Por razones de exactitud, se recomienda su uso para flujos
líquidos en tuberías hasta de mínimo 2 pulgadas de diámetro
nominal.
21
Dadas las pequeñas dimensiones de la instalación, es preciso seleccionar un caudal pequeño, con el pronósito de
disminuir los costos de bombeo.
En la literatura (2) se encuentra que la mínima velocidad
razonable para transporte de líquidos no viscosos, en instalaciones industriales es de 3 pies/segundo.
Se asume
que es posible usar un fiO% de tal velocidad, con lo cual
se disminuyen las pérdidas por fricción en el sistema.
Lo anterior es posible, dado que la corta logitud de tubería no implica costos muy elevados de inversión, que
conlleva el uso de diámetros mayores en la tubería.
El tipo de transmisor usado en este caso, es la llamada
celda de presión diferencial y un rango típico de las
disponibles comercialmente, es de 20 a 250 pulgadas de
agua de presión diferencial.
Por lo tanto, asumiendo un
valor de 100 pulgadas de agua para la presión diferencial
en el orificio, con tomas de garganta, se asegura la disponibilidad del transmisor a emplear.
La ecuación de diseño para un orificio es:
üo
=
—.
^°
. 2 qc (Pa - Pb)
\il - B ^
y
22
"
^
'
(2)
donde:
Uo
= Velocidad a través del orificio pies/segds.
Co
= Coeficiente de descarga del orificio (0,61 para
Nrco
B
=
>
10000)
Relación entre diámetro orificio (Do) a diámetro de
la tubería (DT)
Pa =
Pb
=
Do/DT
Presión aguas arriba del orificio (1 diámetro de tu2
bería) Ibs/ple
= Presión aguas abajo del orificio (0,4 DT)
Ibs
, 2
pie
P
» Densidad del líquido (Ibu/ple^)
Para calcular B a partir del flujo másico (Ib/s)
B2 ,
^ "^
0,61 TT D^ \ ¡ 2gc (pa - Pb)j>
Válida para Nre»
m
«
>
(3)
10000 y donde
Flujo másico (Ib/s)
Nr« = Número de Reynolds a través del orificio
Se asumió tubería de 2" Sch 40, cuyo diámetro interno es
2
2,067 pulgadas y su área al flujo es 0,0233 pie
(3)
m
- 2m4 _ 2 l e e _ ^ 0^^233 ple^ x 62,4
Ibm
pie
23
=3,49
Ibm
<¿^—
Asumiendo Pa - Pb = 100" H_0
2
2 ^
4 X 3,4 9 Ibm/s
0,61 X 3,14 X
520.4 -i^ípie
B
=
= 520,4 —•'•--— , se calculó B
pie2
X
f 2,067 pulgs \ ^Aí 2 Xv 32
12 - J^^"^-P^g
^
2
\
I
f
e
f
s
12 pulgs
pie
'/2
62,4 Ibm/pie^/ = 0,17
•) • ••
0,41
Do = DT X 0.41 = 2,067 pulgs x 0.41 = 0.85 pulgs = 2,15 cms =
0,07 pies
Uo =
m
3,49 Ibm/s
Área orificio xJ)
TT x (0,07)^ x 62,4 Ibra
2
ple^
Uo = 14,5 pies/s
Nreo = 0,07 pies x 14,5
pies
s
x 62,4
Ibm ,
pie
= 100.000
6,72 x 10~^ Ibm
pie - s
Lo cual justifica el uso de 0,61 en la ecuación para B.
24
Las tomas de presión deberán estar ubicadas 5,25 cms aguas
arriba del orificio y 2,1 cms aguas abajo (5,25 x 0,4)
De acuerdo con la literatura las pérdidas de presión pueden estimarse como un 80% de la presión diferencial a través del orificio
=
Pérdida en el orificio = 3,63 psi x 0,8 = 2,9 psi
donde 3,63 psi son equivalentes a 100" de agua.
En la Pigura 4 se muestra la forma del orificio calculado.
•í>-
•
25
•
^
•
,
.
.
-
I 1/4"
Hueco poro
vantllaclon
d« _2."
32
FACULTAD NACIONAL DE MINAS
DISEÑO;
J.A.
Go'maz L.
DIBUJO:
G. M.
Hernández B.
ESCALA:
FECHA:
I:
2
Septiembre
LABORATORIO DE CONTROL
AUTOMÁTICO
O R IFICIO
1.982
FIGURA
4
, ,K
5.1.2,2
Tuberías
Con el propósito de mantener bajo los costos de Inversión,
se decidió colocar tubería de 2" únicamente en el tramo
recto en el que se instalará el orificio, el cual se asegurará por el sistema de flanges.
Para el resto del sis-
tema se seleccionó un diámetro de tubería capaz de manejar
10 pies/segundo/ límite superior de velocidad, recomendable (1).
Con m
=3.49
Ibm
y asumiendo una tubería de 3/4" Sch
8
2
40 con área al flujo 0,00371 pie
en la tubería
se obtiene una velocidad
^ ' ^ ^ ^^/°
0,00371 ple^ X 62.4 Ibm/ple^
.
15 ple/8
demasiado alta.
I área al flujo
Se asume entonces, una tubería de 1" Sch/'con
2
0,006 pie , para la cual la velocidad es:
ü^
-
^'^' '-"^''^
-
9,3 pie/s
0,006 ple^ X 62,4 Ibm/ple^
Se toma entonces una tubería de 1" Sch 40 para el sistema.
26
I
5.1.2.3
Selección de Bomba
El fluido de trabajo es agua a 22°C.
La velocidad másica es 3,5 Ibm/s
Cálculo de pérdidas en tuberías y accesorios.
De acuerdo a los consignado en la Figura 3, se puede construir la Tabla 1, en la cual se anotan, las longitudes de
tubería y los accesorios necesarios para el montaje, y causantes del gasto de energía en el proceso sin incluir la
válvula de control.
V l
%.^ Vs. ^ A%-A o ^ < 6 0 %a^ . V «KS>
\«juw'.T,^
~ ^
*t í .
27
t.
, r i m A
*
ii
río
^
'
TABLA 1.
Unidad
Pérdidas de energía en el sistema de flujo
Descripción
Cantidad
m
Tubería 1" Sch 40
12,2
m
Tubería 2" Sch 40
1,8
u
Codos 9O'l"
u
Tees 1"
3
u
Universal 1"
3
u
Reducción 2" - 1"
2
u
Válvula compuerta 1"
5
u
Orificio
1
M
Tubería 1 1/4" Sch 40
1,4
u
Universal 1 1/4"
1
28
11
Cabeza de descarga:
Cabeza estática:
(Cd)
l,9mx9,8
m
loo
=
y
2
lo,b2
m
s
Cabeza de velocidad:
Cabeza de presión:
(3,048
m )
s
= 4,64
m
Se toma la descarga a la atmósfera y
la entrada a la misraa condición, no es necesario calcular
ceunbio en la cabeza de presión.
Las cabezas estática y de velocidad en la entrada al sistema pueden ser consideradas nulas.
Pérdidas
En tuberías de 1" Sch 40 diámetro interno:
Estimación del factor de fannlng ( -r
1,049
Nr^ = 12
X 10 X 62,4
1,049"
)
pies X Eies
^
pie"
6,72 X 10-4
Ibm
pie - s
f = 0,0085
^^
(figura 5 - 1 0
29
(2) )
= 8117
2 f V^ L
2 X 0,0085 X (3,05)
x 12,2
Pérdidas
1,049
72,41
X
0,0254
m'
s
En tuberías de 1 1/4" Sch 40 diámetro interno:
1,38"
Estimación del factor de fanning.
Velocidad =3,5
Ibm
1
0,0104
62,4
Ibm
• -\
"
5,39 pies
1,6
. .8
Nre
1,38
12
pie"
m
s
X
5,4 X 62,4
pies X pies
Ibm
pie
6,72 X 10-4
16 m
pie - s
f = 0,0095 (Figura 5 - 1 0
(2) )
Pérdidas = 2 x 0,0095 x (1,6)^ x 1,4 = ,
..
1,94
1,38 X 0,0254
En tubería de 2" Sch 40 diámetro interno:
30
2
ra
y/
2
s
2,067"
2,067
Nr
=
pies X £ies ^ _ ^ ^
X 2,4 X 62,4
12
s
6,22 X 10-4
. ^ = 3838
pie
Ibra
pie - s
f = 0,014 (Figura 5 - 10)
Pérdidas =
(2)
2 x 0,014 x (0,73)
x 1,8
_ « .
2,067 X 0,0254
2
2
s
Pérdidas
En accesorios, expansión y contracción
Según Tabla 1 Cap 13 Peter (tln)(a)
Según Tabla 1 (1)
Por expansión de 1 a 2"
pérdidas « (3,04 - 0,73)
2
, ,-
—I —. —
=
¿, b /
m
2
2
y
Por contracción
Pérdidas =
0,05 x (0,73)
» 0,013 ra
2
8
Por accesorios
Pérdidas = 2 x 0,0085 x (3,048)^
138,20
m
2
Según
(1)
31
Til
'J
x 60 •f 3 X 60 -^ 5 X 7
En la Tabla 2, se resumen los resultados, para la energía
total requerida a la bomba por unidad de masa de agua que
cruza el sistema.
TABLA 2.
Energía requerida por kilogramo
Energía consumida (m2/s2)
Causa
Cabeza estática
18,62
Cabeza velocidad
4,64
74,75
Ttiberías
Accesorios
Cambios sección
140,88
Orificio
24,9
Total
263,78
Cabeza requerida por el slste/na en metros de agua =
263,78
-^———
9,8
_
=
,^ p „
2 6,^ m, /
"
~^
32
Asumiendo el flujo de diseño, como flujo máximo de operación del sistema, es prudente escoger un 25% sobre pérdidas dinámicas totales en el sistema, (1) como las pérdidas a través de la válvula de control.
Pérdida de cabeza a través de la válvula de control:
Pérdidas dinámicas = 263,78 - 18,62 = 245,16
Pérdida en válvula =
2
8
-,.c ic
oi TO ™2
245,16 = 81,72 m
^2
245,16
0,75
Pérdida de cabeza =
81,72
m
i_
o -J-J
9,8
Debido a la dificultad para hallar, información técnica
sobre bombas en unidades SI, es necesario establecer que
se requiere una bomba de 24,9 GPM contra una cabeza total
de 35,23 m de agua (26,9 -f 8,33).
Para la selección de la bomba se usó el Pump Selector for
Industry de Worthlgton Pump, Inc.
Se escogió una bomba centrífuga tipo D820
1 1/2 X 1 X 6; 3530 RPM; diámetro Rotor:
Potencia:
5,6"
2 HP.
Lo anterior Implica el cambio a 1 1/2" Sch 40 de la tubería de succión a la bomba.
33
Con tal bomba seleccionada se puede construir la Tabla 3,
en la cual se muestran para el flujo normal máximo (25 GPM),
flujo normal (18 GPM) y flujo normal mínimo (15 GPM), la
cabeza sistema, la cabeza do la bomba y la cabeza disponible para la válvula de control.
TARLA 3.
Flujo
(F)
Pérdidas a través de la válvula de control
Pérdidas del Sistema
(S)
Cabeza Bomba
(P)
Pérd.val.
(P-^
Control
%
LLJ.
GPM
m
CA
m
CA
m
CA
P-M
M
25
27
37,8
10,8
28%
18
11
39,6
28,6
7 2% ,
15
8
40,2
32,2
80%
La Tabla 4 muestra la caída de presión a través del orificio,
para cada uno de los flujos de interés.
Ji
34
/^
.^^
TABLA 4.
Caída de presión a través del orificio
Flujo
GPM
4¿*f- Orificio en pulgadas agua
25
100
18
47
15
37
5.1.2.4
Selección de la válvula de control
Flujo normal máximo (FNM)
=
Caída de presión a FNM
15,4 psi
=
25 GPM
Adoptando la costumbre de permitir que el FNM, sea el 70% de
la capacidad total de la válvula, (4) se calcula el Cv (coeficiente de descarga), asl
^- ^^^
0,7
Cv
«
35,7 GPM
\ri5'4 PSl
-
9.09
35,7 GPM
GPM
(psi) i/2
Con el propósito de compensar la variación cuadrática de la
señal de flujo y mejorar las condiciones de control y dadas
las condiciones de alta caída de presión a bajos flujos y
baja a altos flujos (ver Tabla 3) (5), resulta conveniente
35
seleccionar una válvula de igual porcentaje.
De entre las disponibles en el mercado, se escogió el modelo (V 1400 3/4" de Foxbono).
5.1.2.5
Selección del transmisor
Se toma un transmisor tipo celda diferencial con rango
de 20 a 250" pulgadas de agua de presión diferencial y
rango de salida de 20 a 100 Kpa (3 a 15 psi) v suministro
de aire a 133 Kpa (20 psi).
Se escogió el Foxboro modelo 13A
5.1.2.6
Selección del sensor indicador
Se usará un manómetro de mercurio fabricado en vidrio de
1/4" y colocado sobre una lámina de madera como se indica
en la Figura 5.
36
1—
tn
o
o
ü
o:
DC
Z5
LU
Z
O
ü
O
O
_J
UJ
<
te
UJ
O
Ul
zo o p
o <
o
o o
<
QC
3
QC
1<
Q
O
o
o
o:
<
lO
2
O
UJ
tk
O
Z
O
ffi
<
<
< _J
u.
<
te
bJ
•
J
I<
yJ^ii^tCííiUiíiyiiCCifíhuCft'Uf'J^
•O
M
c
o
«
E
r'^r'-/r,>J.
'o
X•
:É
c(
<
"^^8
-9
Ul
M
O
^06
•uta oos
J
<
O
IO
M
1Z
O
CB
u.
E
6
s6
o
2
w
E
o^
•
.•
•o.
•BM
co
<
s
1
^
c
O
ÓSfi
M
CO
d
i?
3
-1
«
o
trt
UJ
<
o
<
u
X
u.
UJ
Para calibrar el sensor, se utilizará un cronómetro y
una escala graduada, colocada en el recipiente de almacenamiento, el cual se escogió como un tanque asbestocemento de 250 litros, de los disponibles en el mercado.
5.1.2.7
Selección de controlador
El modo de control más usado en sistemas de flujo es el
PI, por lo tanto se escogerá un controlador neumático,
con acción proporcional y de reposición o integral.
Las condiciones de entrada de señales, asi como las de
salida, son estandard, entre 20 y 100 Kpa, y entre los
de diferente marca disponibles en el mercado se seleccionó por econoraía robustez de construcción un 43A de
Foxboro.
Para efecto de registro de la señal, se requiere un registrador neuraático de señales, y por economía se puede
seleccionar un aparato de registro múltiple (3 ó 4 plumas) , que preste servicio a toda la planta.
Se seleccionó el modelo 45 de Fisher & Porter.
37
5.2 ''JIVEL
El principal objeto en control de procesos, para la utilización del control de nivel, es mantener un suministro constante de fluido a los equipos aguas abajo del recipiente.
Es importante también en reactores auímicos para mantener
concentraciones y velocidades de reacción, asi como en torres de destilación, para mantener el balance de materiales,
siendo en tal caso usado en el tambor de reflujo.
(1)
Dinámicamente es un proceso lento que puede tener características no lineales, de integración pura o como elemento
de primer orden.
(6)
Combinaciones de recipientes, facilitan la representación
en laboratorio de, sistemas con o sin interacción y de sisteraas de segundo orden o aún mayor.
Un sistema de control de nivel en el laboratorio debe servir para:
Reconocer las características de instrumentos sensores,
transmisores y modos de control, incluyendo el de dos
posiciones (on - off)
Desarrollar habilidad para control de sistemas lentos,
ensayando para ello el efecto de los diferentes modos
de control y la acción inversa en controladores y elementos finales.
38
Comprobar el comportamiento de sistemas de primer orden.
Comprobar el comportamiento de sistemas interactuantes.
Comprobar el comportamiento de sistemas de elementos en
cascada sin interacción.
Observar las discrepancias entre sisteraas linealizados
y su contraparte real.
Para poder lograr los objetivos de la unidad de nivel, esta debe disponer de facilidades para:
Simular sistema de primer orden, puede ser un tanque con
descarga por gravedad.
Simular sistemas de orden mayor, lo cual puede obtenerse colocando dos tanques por lo menos en cascada con interacción,
3. Medir flujos instantáneamente, tanto a la salida como
en la descarga.
4.
Permitir la simulación de perturbaciones, mediante la
apertura o cierre de canales adicionales.
5.
Registrar las variaciones de nivel.
6.
Transmitir y controlar mediante acción directa e inver-
sa y con modos PID.
7.
Controlar mediante modo dos posiciones (on - off) el
nivel.
39
Las f a c i l i d a d e s a n o t a d a s so puedon ol^teror m e d i a r t o un
s i s t e n a cono e l mc;.stradü ir. I.i rjq'iira
''.
Con e l '>rnpósito de l(jigr¿ir iconomía de e s p a c i o
de o p e r a c i ó n " (jconomlü íi<^ i'fua,
(•'acuidad
i^o o s c o g i ó l a d i s t J o s i c i ó n
mostrada en l a F i n u r a 7.
5.2.1
Cálculo y selección dn nr^uT^.n:-. o^ instrun-.^nto^
"^e anume c o r o f'lujo do n . e r a c v ó n normiil "^.'i I'g/r^ de agua.
Seleccionando una t u l ) e r í a de 1" She40 se o b t i e n o una v e -
•icjy
l o c i d a d de apróximadamíinto 3 ¡ue.T/s (7) v e l o c i d a d nínima
recomendada para f l u j o de l í r i u i d o s
5,r?.l.l
C)
S e l e c c i ó n dol r o t á m t ' t r o de e n t r a d a :
Asumiendo e l f l u j o de o p e r a c i ó n normal
como la mitad riel
rango do v a r i a c i ó n , es p r u d e n t e ef^coger un r o t . í n c t r o do f P
l i t r o . s do c a p a c i d a d .
De ont-ro l o s dis[)onible.s er. e l morcado 5e nelof^ciOif'. np r^-t á n e t r o F i s h o r & P o r t e r s e r i e lOAlOD") linsta c^ l i t r JÍÍ/ni ñuto.
j . 2.1.2
.^elección de boml^a
La cah^za r o q u e r i d a ] or o l sistema a f l>.i io :.ormcí'i
div<>r ;o : c o p ' T o b a n t e s so muo."tra on l a
40
'
ara IOÍ:
UJ
o
LU Z
O
O
. O
< LU
2
O
©" ^^^
-I
o
o:
O
U
<D
•-
<
cc
^ O g
UJ
< flc o
2 P I-
O
<
'^ < 3
UJ
^ S
B S
If -•
•-
tn
tn
«I
«>
0»
tf
8
•f
o
M
•I
o
3
OZ
•^
k
o
F
o
o.
•O
o
IO
1
o
o
fO
o
^
•>
«
O
"O
o
u
"O
c
s
o
_
O
o
xa
o
F
m
w
o
ao
tz
co
w
O
•o
o
o
c
o
o
o
*.
tz
o
o
•
•o
o
>
" o
>
tti
6
o
>
c
•»
•k .
o
o.
3
w
k.
•
•-
c
—
-«ífO
u>
l<~
oo
o
u
E
<o
tn
<
tn
u.
X
o
Ok
—
o
o
o
UI
FACULTAD NACIONAL DE MINAS
DISEÑO:
J . A . Gómez
oibujo:
6. M. Hernondez B.
ESCALA:
I:
L.
LABORATORIO DE CONTROL
AUTOMÁTICO
SISTEMA DE CONTROL DE NIVEL
25
DISPOSICIÓN
FECHA
Septiembre
1982
FIGURA
TABLA 5. Caída de presión en sistema de nivel
ítem
Descripción
Car
dad
AP
5 m
0,07
1
(p¡s i )
1
Tubería 1 1/4 Sch 40
2
Rotámetro entrada
1
0,5
3
Tubería 1" Sch 40
6 m
0,36
4
Válvula de globo
1
0,63
5
Válvula compuerta
4
0,058
6
Codos 90°
7
0,88
7
Teí
3
0,39
Total cabeza dinámica
»i
.
]p s i ( 1 , 9 5
2,87
Cabeza estática = 2,6 m H O
Total cabeza dinámica + estática = 4,5 m H_0
50% para la válvula de control = 4,5 H»0 •
Cabeza total = 9 m H«0
Flujo equivalente : 8 GPM
De entre las bombas disponibles en el mercado se selecciona una IHM de 1/2 HP.
Succión:
1 1/4"
1
Descarga:
5.2.1.3
1" 0 rotor = 4 "
Selección de la válvula de control
El coeficiente de descarga requerido es:
Cv =
8 GPM
0.5
--_
\ 6,38'
j - ,
< T T - i -
T
= 6,33, asumiendo la válvula lineal
y trabajando al 50% de su capacidad al flujo normal (8 GPM).
41
H2O
Se selecciona una válvula Kieloy & Miller lineal serie
1400 de 3/4"
Asumiendo un factor de recuperación de presión de 0,8 generalmente bueno para el tipo de válvula seleccionada, se usa
la siguiente ecuación, para ol cálculo de ^ P disponible:
AP disponible = F" (pa - Pv)
(7)
•
F = Factor de recuperación
Pa = Presión de vapor del agua a temperatura ambiente.
APd = (0,8)^ (24 psi - 0,5 psi) = 15,0^
Dado C7ue el
TJ.SÍ
AP en el sistema para la válvula es de 6,4 psi,
esta no presentará cavitación ni flasheo.
5.2.1.4
Determinación de elevación y capacidad de los tanques
En condiciones de equilibrio (flujo estacionario), el flujo
por gravedad desde los tanques, debe igualar al flujo desde
la bomba hacia los tanques, esto debe ser de 8 GPM.
Asumiendo una tubería de 1 1/4" Sch 4 0
íTi = 1,38"
Área al flujo = 0,0104 pies
Flujo: 8*GPM = 0,017
2
pie
8
42
(3)
B. Conexión p o r o tuber i'a 0 = 1 lA^"
C. Conoxio'n p a r a t u b e r í a
0 = 3/4"
D. Con«Ki<ín p o r a tuben'o 0 = l "
E. Fondo d e l tanque
NOTAS:
1. Todoe lae u n i o n e e
d o e de h i e r r o
2 . Oimeneionee
roeca-
golvonlzodo.
en m m .
ELEVACIÓN
PLANTA
FACULTAD NACIONAL DE MINAS
DISEÑO:
J . A . Gómez
DIBUJO:
G. M. Hernondez
ESCALA:
FECHA:
I:
L.
LABORATORIO DE CONTROL
B.
10
Septiembre
AUTOMÁTICO
TANQUE
DE
NIVEL
1982
Fl 6 URA
O
300-2
B.
Conoultan p a r o t u b e n ' a 0 = 1 1 / 4 "
C.
C o n e x i ó n pora t u b e r í a 0 = 3 / 4 *
Q
Conexlo'n para
E.
Fondo
del
tubería 0 = I "
tanque
o
o
NOTAS:
1. T o d o e
loe u n i o n e e
roeco-
d o e d e t i i e r r o golvonTzodo.
2. Todoe loe dimenelones en
ffl m.
ELEVACIÓN
o
K>
PLANTA
\
FACULTAD NACIONAL DE MINAS
DISEÑO
J. A. Gómez
DIBUJO
G. M. Hernández B.
ESCALA;
10
FECHA;
Septiembre
L.
LABORATORIO DE CONTROL
AUTOMÁTICO
TANQUE
DE
NIVEL
1.982
FIGURA
e-A
300-3
3
0,017 n i e / s
'
;
0.0104 p i e
Velocidad =
Nr
=
D\l/^
M
^
_ i co ^<^
1 ' " . 2 i ^ _ = 0 , 5 0 _m.
s
j,
0,135 m X 0.5
m
x 1000 Kq/m^
s
0,9
gm
-a_
cms
„ ir.-2
X 10
22ises
cp
^
•
n.OOl Kq/g
0.01 m/cm
-1^-
= 19444
f = 0,0062 (McCabe Fig. 5-5) (3)
2
hfs,j, - 4 f _ C _ — V — := 4 X 0.0062 x 2,5 m
„ ,„ ^.2
0,035 m
_
¿
« 0,22
2
s7"
m^
2
8
^^^A " (3 X 0,9 + 10) X 0,125 ra" _ , co „2
i,Da j n —
8^
^^s
Total
2
ra
2
= 1,81
^2
2
8
=
0,125
ra^
2
s
• 1
^ ^ = '^f T o t a l
g
+
V2
2 g
A Z = 0 , 2 ra
43
(McCabe Tabla 5,1)
(3)
-"^-^ =r
• ••'
Considerando como aceptable una constante de tiempo en el
tanque de 8 minutos (por facilidad de obervación)
Volumen = 8 GPM x 8 min ^ ^^ galones (121 litros)
.
(1)
2
Dejando un margen de 15 cms en el tanoue, sus dimensiones
son:
Altura real del tanque = 80 cm
Diámetro del tanque
= 50 cm
El material de los tanques es acrílico transparente con el
propósito de elirainar la necesidad de elementos indicadores
de nivel.
Para facilitar la utilización de un transmisor tino celda
diferencial estandard, en el sisteraa de nivel, y aderaás los
mecanismos de supresión de rango es conveniente elevar los
tancfues a una altura de 70'* (1,8 m aprox.)
La Figura 8 muestra el diagrama esquemático del tanque.
5.2.1.5
Selección rotámetro de salida
Este rotámetro debe tener las mismas características del
de entrada, esto es, sirve el modelo 10A3000 hasta 60 litros/mln de Fisher & Porter.
44
5.2.1.f¡
.^^elección de tan^u
d... roC'elección
Este t.\ni:uG drbr t m n r ca acidad paro alm: cenar tros vece."
el volÜT'.en de los tanc;uf- cle^/ador,, en o¡>eraci'1n erjto er.
120 litro-, y además garantizar .^umir.i trr; T 1
vórtices.
nom a .in
Se selecciona un taii' uo de a3>iesto cem.r-nto de
250 litros de capacidad.
5.2.1.7
Selección de son.sores
transmisores / controla-
dor registrador.
De entre los sensores disi'oni^les j ara i^.ivel . ol más conveniente para la aplicación roftuerida
os decir .^ara reali-
zar control regulante, es el de ti'^o celda diferencial.
Por lo tanto se elige la celda Foxboro modelo 13 con un
rango de 20 - 250" de agua a la entrada, y de 3 - 15 psi a
la salida.
Este instrumento sirve tamhit^n para transmitir
la .señal y por lo tanto se comporta como senr-or-transmisor.
rl controlador será un Foxl-mro 4 3 .^P por su versatilidad,
robustez y economía.
El registrador será un Fi.sher multipunto tara! ien utilizado
en los sistemas de flu^o y temperatura on el Laboratorio.
45
5.3
TP^IPFRATURA
La temperatura es auizá, la variable más controlada en
procesos.
Prácticamente es el parámetro determinante en
situaciones en que presión y flujo carecen de importancia
(procesos con sólidos, reacciones en raedio líquido en cochada).
Desde el punto de vista dinámico los procosos de temperatura son en general lentos, ya ciue sus cambios están regidos por la capacitancia del medio para el cual se mide
la temperatura y de los parámetros de transferencia de
calor.
Por otro lado los equipos de intercambio usados
en transferencia de calor constituyen un caso típico de
sistemas con parámetros distribuidos.
Un efecto importante, por su frecuente ocurrencia y su
capacidad desestabllizadora, lo constituye el denominado
Retraso de Transporte, este es particularmente importante en sistemas de control de temperatura.
-,
Un sistema de control de temperatura en el laboratorio,
debe permitir
1.
Reconocer las características de sensores y transmi-
sores de temperatura.
2.
'
Neumáticos y electrónicos.
Estudiar el efecto de diversos modos de control apli-
cados a temperatura.
46
3.
Identificar la presencia de Retraso de Transporte y
analizar su influencia en un sistema de control.
4.
Admitir la presencia de perturbaciones.
Con el propósito de lograr los objetivos anotados antes
el sistema de temperatura debe contar con las siguientes
facilidades:
,:
1.
Sistema de calentamiento de agua.
2.
Sistema de agua fría.
3.
Mezclador de fluidos a diversas temperaturas.
•
: ;
' ^
4.
Sensores electrónicos y neumáticos. ^
5.
Elemento final de control eléctrico y neuraático.
6.
Controlador eléctrico y neumático.
7.
Sistema para simulación de Retraso de Transporte.
.
.
El sisteraa seleccionado para tal fin se muestra en la Figura 9.
47
UJ
o
o
<
QC OC
ot
h- =»
O <
u oc
<
ir
UJ
Ul 9:
-O
tn
m
oS
8
-g
E
-o
X
o>
o
o
0
O
o
o
o
í-
«
o
O
O
o
cvl
«3
tr
c
o
1-
1
O
O
IO
u
o
x>
b
O
o
a
O»
m
<
)
—
O
o
tn
<
o
cn
o
UJ
o
TnI
co
•
<
X
m ^
5.3.1
1 II .1 ^H|. I KB
Cálculo de unidades
5.3.1.1
Bases de diseño
El objetivo del sistema mostrado en la Figura 9 es doble,
a saber, representar un sistema con Retraso de Transporte
y un sistema de control de temperatura con retrasos siraples.
t
El primer objetivo se logra, al usar un método de transferencia de calor, por contacto directo entre dos corrientes
de agua a diferente temperatura, con lo cual el proceso de
transporte es rauy rápido y el retraso de señal, es causado
estrictamente por la demora de transporte entre el punto
de mezcla y el de medición de temperatura,
^
El segundo se logra, mediante el ciclo TT-1 - TRC - 1 y
TCV - 1, situado alrededor del tanque agitado 2 (ver Figura 9) y en donde la variable controlada es la temperatura
de salida, la variable manipulada es el flujo de agua caliente y las perturbaciones, el flujo de agua fría, la temperatura arabiente y la temperatura del agua caliente.
5.3.1.2
Sisteraa de Retraso de Transporte
Corao fuente de agua caliente, resulta conveniente el uso
de un calentador de agua doraéstica, con 60 galones de capacidad, debido a su disponibilidad, confiabilidad, y facili-
48
dad de instalación.
La citada capacidad es la más grande disponible comercialraente y suministra por lo tanto 3,78 litros/minuto, de agua
a 70°C (8) por lote de agua calentada.
Seleccionando como temperatura deseada 4 0°C, la cantidad
(M ) de agua fría (20°C) necesaria para la mezcla viene daF
do por;
T-
(M_
F
+
3.5) 20 = 3,5 (50)
M_
=
5,25 lltros/mln
r
Para temperatura deseada 30°C
M„
=8,2 litros/rain
Para temperatura deseada 45*C
Mp
=
/
3,5 litros/rain
Dado que la velocidad de registro más rápida disponible comercialmente (9) es de 1 pulgada de avance/minuto, se considera que es necesario al menos un retardo capaz de registrarse en 1/6 de pulgada por lo tanto equivalente a 10 segundos,
cuando la temperatura deseada sea de 35°C (mezcla total 11.7
litros/rain)
49
Esto supone un tramo de tubería con un volumen de 11,7
litros
X
=
1,95 litros
Si se selecciona una tubería de 3/4" BI'7G No. 12, se requiere un tramo de 14 metros, entre el punto de mezcla
y el de medición de temperatura.
Si la temperatura deseada es de 45°C, el retraso de transporte involucrado será de
—1'95
'
=
16 segundos
El cual se registraría en 7 mm de papel en el registrador.
Para economizar espacio, resulta conveniente disponer,
la tubería en espiral, usando tubería flexible de diámetro interior equivalente.
Para permitir comparación, se dispondrá un tramo recto
de 1,5 m, delraismodiámetro, con retraso de transporte
de 1/10 respecto al asociado al tramo largo.
Un rotámetro, permitirá conocer en cualquier instante,
el flujo involucrado.
50
H
«
f
»-
JJ
J
1750
2000
PLANTA
II—iSh-{X}-
9
-00-
ELEVACIÓN
ELEVACIÓN
C-C
h
o
í
-X•iXi-
O
T
200-1
A
A-A
o
300-1
FACULTAD NACIONAL DE MINAS
-XJ-
" • " ^ — P 101- I
inri
J. A. Gonnez L.
DIBUJO:
G- M.
ESCALA:
I :
Hernández B.
AUTOMÁTICO
DE CONTROL
DE TEPERATURA (DISPOSICIÓN)
FECHA:
B-B
LABORATORIO DE CONTROL
SISTEMA
20
li
-DrenajA
ELEVACIÓN
DiSEfio:
Septiembre
1.982
FIGURA
10
5.3.1.2.1
S e l e c c i ó n de i n s t r u m e n t o s y ecmipos
C á l c u l o d e ca'oeza o n t r e l o s n u n t o s 1 v ? ( F i g u r a 10)
T u b e r í a r e c t a d e 1/2"
Nr
= D\i¿— ^
M
d.cd 4 0;
^f.&r^ mm
O 622/12 x 3,35 x 61,84
_4
0 , 6 5 X 6 , 7 ? X 10
Ib/pie^
lh
pie - s
= 24583,33
f = 0,007
AH
"
=
4 f
(10)
L
V^
y, co 2 , 2
4,58 m / s
=
D
2
AP = 4 , 5 8 X 9 9 0 , 2 5 K q / i J
En m d e a g u a a 4 5 ' C
=
=
4535,34
4 , 5 3 ra / s
Kgm
.p^.
2 2
s m
= o 46
9,8 m / s ^
-
Accesorios
7 tees de 1/2"
5 codos de 1/2"
Ahf
(3,35)
(5 ^ Q^75 -H 7) = 1.87 p i e s = 0 , 5 7 m
2 X 32,17
(10)
51
2 válvulas de corapuerta
2
^^'?.^^
2 X 32,17
(2 X 0,17)
=
0,018 m
(10)
14 metros de tubería de 3/4 nvJG 12 dispuesta en hélice,
con diámetro de hélice 40 cm.
V = 4,58 pies/s
Nr® =
0,532/12 X 4,58 x 61.84
^
18685
6,72 X l O ' ^
fc = 0,08
(18685)-°'^^
-H
0,01/
0^532
12
(10)
1,31
0,00862
h f s =• 4 x 0 , 0 0 8 6 2 X
14
^
^
,
,Q2
JLÍJZ—
0,0135
2
= 34,54
^.
,
m"^
2
8
h f s = 3 4 , 5 4 X 1,1
=
37,99
ra^
2
8
En m e t r o s d e a g u a = 3 , 8 7 m
52
Rotámetro
Como rotámetro conviene seleccionar un Fishor
Porter
modelo 10A270n de 3/4" No. de tubo F P 3/4 - 27 - G 10
Flotador No. 3/4 GNSVT-56, con capacidad de 19,1 litro/
min, para el cual la caída de presión es de 0,29 m de
agua (11).
La caída de presión a 12 litros/rain, entre el punto de
descarga (2) al tanque 2 y el punto de raezcla (1) es
entonces de 5,2 m de agua (densidad 900,25 Kg/ra )
Como se descarga a presión atmosférica la presión en
el punto 1 debe ser
51,03 X 990,25
^ 35^3 . ^35^33 ^^^ ^^^^^
1000
cálculo de cabeza entre los puntos 1 y 4 (Figura 10)
Entre el punto 1 y el punto 4 (Figura 10)
Tubería recta 1/2" Sch 40 :
2,4 m
Velocidad =2,37 ples/s
Nr^
=
0>622/12 X 2,37 x 61,84 _ 3^130^ 7
6,72
x lO"'*
f = 0,007
53
- -V
Ahfs =
I'
— ^ - J . — x (0,72) "
4 x 0,007 X
= i oo m"^
r,
0,016
r,
s
= 0,112 m de agua a 20°C
2 codos, 3 tees, 2 válvulas de compuerta
2
hfs = (2,37)
2 x 32,17
j2 ^ f^^-j^ -I- 3 -I- 2 X O 17)
= 0,13 m
Total pérdidas por tubería y accesorio 1 y 4 = 0,242 ra
Más caída en válvula de control = 0,242 m
Total pérdidas entre 1 y 4 = 0,484 m de agua a 20° (098,23
Kg/m^)
Equivalentes a 4,73 Kpa.
Bomba
La presión de descarga de la bomba debe ser 135,83 -»4,73 = 140,56 Kpa (abs) por lo tanto se requiere que suministre una cabeza de 55 Kpa con un flujo de 8,5 litros/
minuto o en unidades inglesas (aún son comerciales) 18 pies
de agua a 2,24 C.P.M.
'
En estas condiciones la bomba adecuada es una tipo regenerativa (turbina) IIIM modelo R-1/2 de 1750 RPM y 1/3 HP (12)
Válvula de control
Para la válvula de control, hay disponible 0,35 psi
S4
, t
•X '
(0,242 X 9 , 8 X 0,99823 x J - ^
ion
Cv =
•? 42
•^
0,7
\|o,35
)
= 5,4, de característica
lineal
Se selecciona una válvula de aguja Foxboro V4A tipo M
Entre el r^unto 1 y el punto 3
Flujo:
(Figura 10)
3,5 litros/rain agua a 7n°c
tubería 3/8" Hch 40
V,
V = 1,54 pies/s
N^
(0,47 m/s)
= ",493/12 X 1,54 X 61,84 ^ 14555,43
•4
0,4 X 6,72 X 10
= 0,0072
(10)
^ - ^ —
hfs = 4 X 0,0072 X
0,0125
-
X (n,47)^
,
0,72 m*^
rt
Accesorios
2 tees, 1 codo y 1 válvula compuerta
2
^^^ = ^^^^^.^"— (0,75 -I- 2 -I- 0,17) = 0,033 m
2 X 32,17
hfs = 0,073 + 0,033 = 0,106 m
Equivalente a un Ap entre 1 y 3 de 1,04 Kpa
Presión es el punto 3:
135,83 -»- 1,04 = 136,87 Kpa
55
(13)
Equivalentes a una presión manométrica estandard de 5,53
psi, a la descarga del calculador, presión aue puede ser
suministrada por la línea del acueducto.
Sensor
transmisor de temperatura
Con el propósito de ilustrar al estudiante sobre los diversos sensores de temperatura se selecciona un conjunto
de sensor clase IA con transmisor neumático marca Foxboro.
Este instrumento es totalmente compensado, tiene un rango de -300 F a -f 600"'F
Alcance mínimo de 40*F (22*0
Alcance máximo de 600"F
(13)
Ya que la temperatura deseada será de 35''C, se puede ajustar en el aparato un alcance de 24 a 46°C.
-
El instrumento envía una señal de 20 - 100 Kpa y requiere 120 Kpa en aire libre de aceite.
Controlador
Se empleará un controlador neumático tipo 43 A de Foxboro, con modo proporcional, integral y derivativo.
Indicador de temperatura
56
Se empleará un termómetro bimetálico de carátula con rango de 0-100°C
5.3.1.3
Sistema de control de temperatura con retraso
Simple.
Este sisteraa usará agua caliente proveniente del calentador
I (Figura 9) vraediantemezcla en el tanque 2 (Figura 9) con
agua fría, se logrará un nivel de temperatura a la salida,
el cual constituirá la variable controlada.
En la Figura
II se muestra esquemáticamente el sistema aislado.
5.3.1.3.1.
Cálculo de instrumentos y equipo
Un balance de energía alrededor del tanque 2 (Figura 11),
conduce a la siguiente ecuación
(A) V p Cp
dTs
^ f-c p
Cp Te + F f P
CpT - F s ^ CpTs - Qr
. d e
En donde:
> •
-.
V = Volumen r e t e n i d o en 2
J> = Densidad
[pie j
[ib/ple^]
Cp « Capacidad c a l o r í f i c a
F BTU 1
[ib'F J
Ts « Temperatura de salida ["F1
© » Tiempo
Fc » Flujo agua c a l i e n t e
[pie / h r j
57
;
•
TR
- 7 ^
Aguo
Caliente
Agua
Fría
Ft
Tf
r r
z
300-1
iJL*.
• ' - * -
OISEAO:
a A. Gómez L.
DIBUJO:
6. M. Hernondez B
ESCALA:
FACULTAD NACIONAL DE MINAS
LABORATORIO DE CONTROL
AUTOMÁTICO
SISTEMA CON RETRASO
sin escolo
SIMPLE
PARA CONTROL DE TEMPERATURA
FECHA:
Septiembre
1.982
FIGURA
II
Te = Temperatura agua caliente
I
-
rFj
-1
-1
pie /hrj
T
= Temperatura agua fría \ ^ F \
Fs = Flujo de descarga [pie /hrj
Ts = Temperatura de salida |*FJ
Qr = Pérdidas por radiación
BTU
hr pie'
y Qr = hr (ts - To)
(15)
To = Temperatura ambiente ['FJ
Para evaluar hr
hr -
0>61 X 0,173 (6,18^
-
4,47^)
158 - 77
0,73
BTU
hr pie'
—1
•F I
-•..-• '.
y.
Dado que la temperatura máxima disponible son 7 0 "C, se
pueden considerar constantes O y Cp.
Con el propósito de determinar la dinámica del proceso
entre Ts (variable controlada) y Fc (variable manipulada),
se asumen pequeñas variaciones en Fc alrededor del valor
normal (3,5 lltros/mln) y constancia en el valor de F^
Ty:
y Te y To (su efecto en el valor de Ts, es conside-
rcüole, de hecho son las perturbaciones que exigen compen-
58
,
sación, sin embargo haciendo uso del principio de superposición, su efecto puede ser calculado por separado y
sumados para determinar el comportamiento total del sistema)
F^
= 8 , 5 litros/min
Tx
= 20*C
p
= 6 2 , 4 Ib/pie"
Cp
=
1
BTU
16
Te
= 70*C :
To
= 20«c
.y
•
,
"F
• : -J •
;' .
y
".'. '
JJ*
I.
-
',
•
'
•
.-' '^'
-
'
.
•'.'••-
La ecuación (A) se escribe en términos de incrementos (14),
quedando como:
V
dTs
Fc (T^ - Ts) - Ts (Pe + F^
- K^)
(B)
d6
donde K. = 0,77 x 4,3 J
- --3
62,4
ís = Valor raedio de Ts
35•C
Fc = Valor raedio de Fc
Qr
Este parámetro refleja el efecto de las pérdidas por ra-
59
2
diación, considerando un área expuesta de 4,3 pie
su valor puede despreciarse.
^
Reordenando
y por
(B) :
A
^ fC + F
Z
d
En donde
\pc • F^
V
F c •^
T,
1
••
'
= Constante de tiempo
(T)
FJ
-
Ts
= Ganancia de estado estacionario
Fc + F.J:
• '" •
•
-
Fe
'
-
•
'
.
.
'
•
-
•
Dimensiones del recipiente 2
Asumiendo corao buena T « 0,05 hr, por facilidad de operación y registro, el volumen es:
'
;,
•
''A'
IT
'
•
L
• •' •
"•':•*
- • "•
•
1: -
•
•
••.••'
-:.•>•
V = (7,4 + 18,) x 0,05 = 1,25 pie^
que pueden ser dispuestosen un recipiente de 400 mm
de diámetro por 300 ram de altura.
Para facilitar el funcionamiento del sistema de retraso de transporte, la altura se lleva a 600 mm.
60
La descraga del tanque 2, se realizará por una tubería
de 3/4, la cual a 12 litros/min (1,81 pies/s) con una
válvula de compuerta abierta 60%, requiere una cabeza
de 30 cms de agua.
(16)
Válvula de control
Flujo:
3,5 litros/min
M = 0,4 X 6,72 X lO"^
Agua a 70'C.
Ib
(3)
pie - s
p = 62,4 Ib/pie^
Tubería:
Long. 3,93 pies (1,2 m) diámetro 1/2" Sch 40
Velocidad:
Nre =
0,86 ples/s
(16)
0,622/12 x 0,86 x 62,4 ^ 10349 15
0,4 X 6,72 X 10"^
f
= 0,08
^^Tub
(3)
' -* "^ ^^'008 X
3,93 X 12
^
(Q ggj2
X 62,4
0,622
= 1,79/144
Accesorios:
2 X 32
= 0,012 psi
3 tees, 2 codos, 2 válvulas de globo
longitudes equivalentes (pies) = (3 x P.) -H (2 x 10)
+ (2 X 900)
= 1844 pies
(16)
61
3,93
Presión a la salida del calentador:
30 psi
Caída de presión en línea -^ accesorios = 5,6 psi
Caída de presión para válvula control = 24,4 i)si
Flujo:
3,5/3,785 = 0,9247 galones/min
= 0,31
c^ - j L ^
0,6
:
1/24,4
Se selecciona válvula modelo V4A tipo G de aguja marca
Foxboro.
Motor neumático.
(13)
Transmisor de temperatura
j
Se selecciona un termopar como sensor primario, tipo j .
(17)
•
:
^
:
Controlador indicador
Se selecciona un controlador electrónico Electromax
III de Leeds & Northrup modelo 6435 tipo ajuste de
corriente (C.A.T.).
Salida de 4-20 mA.
(18)
Convertidor electroneumático.
Para hacer compatible la señal eléctrica con la naturaleza neumática tanto del motor de la válvula como
62
del registrador se selecciona un convertidor Leeds &
Northrup modelo 10970.
Entrada 4 - 20 mA
L
63
(18).
5.4
PRESIÓN
El control de presión es necesario, cuando la presión es
el parámetro principal para la realización del nroceso,
por ejemplo en reactores químicos, procesos de destilación, operaciones de secado (en que la presión puede ser
de vacío).
Típicamente está asociada a fluidos compresibles o sistemas de proceso que involucren fase gaseosa.
Un sistema que permita en el laboratorio, el manejo de fluidos compresibles, resulta importante en la familiarización
del estudiante con el manejo de instrumentos y equipos en
aplicaciones gaseosas.
Dinámicamente, son sistemas rápidos, que a bajas oresiones y caídas de presión, se comportan como flujo incompresible con buena aproximación (3), para altas presiones y/o
caídas de presión, se diferencian netamente y deben entonces tenerse en cuenta efectos sónico, variabilidad en viscosidad, densidad, efectos térmicos.
Bajo condiciones ordinarias de presión y temperatura, la
más importante limitación ocurre cuando la presión aguas
abajo de una restricción (válvula, orificio) (P_) es menor que el 50% de la presión aguas arriba P-
64
. •«!'"=TI V.--.-
; ,1
P^
<
0,53 Pj^
(19)
En tal situación se establece flujo sónico en la restricción V la presión aauas abajo (P-) deja de tenor influencia sobre la intensidad del flujo^
El sistema de control de presión en el laboratorio, debe
permitir:
•• •
1.
' ' •
"
- - • - ; / • " • : - ::,jy,p
Identificar la dinámica de elementos sencillos con
flujo compresible.
2.
< ; .
Reconocer las earaeterlsticas de selección, instala-
ción y operación de instrumentos aplicados al flujo compresible. ..;
.
3.
• •.• í -
' • ••'
-.
:..'_ /
.'-'^.'d''
..•
..
:".•••/
• • • • • • .
.
,./-
'
. . .
..
.:..•:
^••'
•
- I
.•>
.
.. •
Reconocer y analizar el uso de elementos de control
de dos posiciones (on - off).
5.
•
' ;.
Aplicar modos de control PID y analizar su efecto en
el control de presión.
4.
-
'"
. *^
Introducir y aplicar, la técnica de síntesis y monta-
je de sistemas de control secuencial (estático).
fi
Para cumplir con estos objetivos, se diseñó ol sistema
mostrado en la Figura 12.
Tal sistema incluye para simular el control usado en calderas pirotubulares y para realizar control proporcionante de presión.
5.4.1
Cálculo de unidades
5.4.1.1
Bases de diseño
Se dispone de un compresor de 8 Scfm a 100 psi de descarga.
Para el sistema de control de presión proporcionante, se
descargará a la atmósfera, se usarán instrumentos comerciales.
Al tanque de presión 301-2, deberá llegar una línea de
conducción de aire, a través de una válvula solenoide,
para ser empleado en el sistema de control secuencial.
Se dispondrá de indicadores de flujo de aire para facilitar la identificación de dinámica.
Se diseñará con una constante de tiempo teórica de mínimo
5 segundos.
66
8 ^«^
V-l
Volvula
Autorreguladora
V-2,V-3, V-6, V-7, V-8 Volvulos de agujo
V-4
V-2
Válvula
V-9 Válvula
101
^-^l
Solenoide
de compuerta l"
Bomba
201 Tablero
301-1 Tanque Pulmón
V-8^PfV>
301-2 Tonque Presión
302-1 Tanque
Nivel
302-2 Tanque Almacén
P L A NT A
1/4" sen 40
301-2
2.
^
T
V-6
30!
V-3
HXl
0- 1/2"
A-A
V-2
-Ah
ÍX}-
302-2
ELEVACIÓN
V-4
0--\/?.'
-iXh
V-8
ELEVACIÓN
B-B
FACULTAD NACIONAL DE MINAS
DISEÑO
j . A. Gómez
DIBUJO
6. M. Hernández B
ESCALA:
I :
L.
20
LABORATORIO DE CONTROL
AUTOMÁTICO
SISTEMA
DE
FECHA
PARA CONTROL
PRESIÓN
S e p t i e m b r e 1.982
F IGUR A
12
En el sistema de simulación de la caldera se recirculará
el agua.
Se usará un sistema de control de estado sólido.
5.4.1.2
Sistema de control de presión proporcionante.
Selección de flujo normal.
Suponiendo flujo isotérmico, a través de la línea de descarga, lo cual puede asumirse dadas la presión y la velocidad bajas necesarias, se empleó la ecuación
^'^ - ^ ^
2 RoT
(^-' - ^ ^ ' ^ - . ^ i - ln
q„
Pa
Pb
2 .
^ T
AL_
2 ge r„
PJ
y se procedió a realizar un procedimiento de ensayo y error
Lli y G, para cumplir con las bases de
para hallar Pa ,
diseño.
En la ecuación
M
(c)
= Peso raolecular
Ro = 1545
Ib
pie
Ibmol
T
"R
= 533 °R
Pb = 1771,2 Ib
/ple^ (abs)
67
ge = 32
Ib pie
Ib m s
^H = -i- X 0^622 p,^^
4
12
AL = longitud equivalente de tubería.
Este valor se modi-
ficó mediante el uso de válvulas de aguja.
Del trabajo anterior se obtuvo el siguiente conjunto de
valores para los parámetros;
Tubería 1/4" Sch 40
;
,
d ']
'
', '
'
2 válvulas de aguja
3
. • "• '• ^
•
• ' V-
' •'
1 rotámetro Rango O - 40000 cm /rain aire a 0*y atm.
' V
pa = 21,3 psia
;, . v
-;'
pb = 12,3 psia
•••-
•
-
-•
f.
Intensidad de flujo normal máximo:
*>, m
37000 cm /min
Capacitancia =
,
'"
Resistencia (a flujo normal máximo) = 16,3 psia
scfm
Constante de tiempo = 10 s
^
-^
6 X 16,3
. '.'
:''^
X 14,7 = 0,15 pie^ (= 4,20 litros)
(1)
Fl sistema permite auraentar la constante de tiemi^o; facilitando el registro de la señal se seleccionó entonces una
68
'
constante de tiempo de 2 min, ])ara lo cual el volumen
del tancue 303-2 (Figura 3 2) resulta
^ ""
X 14,7 = 1,8 pie-' (= 51 litros)
l'^',3
Se disponen entonces en un recipiente cilindrico c*e 0,3 m
de diámetro y n, ?! m de alto.
Válvula do control.
A flujo máximo, la caída de presión, deberá r,er asumida
esencialmente por la válvula de control.
Cv =
79,2
1360
\i-^^^^
= "'^302
K 5 X 21,
(7)
Esto perm.ite seleccionar una válvula de aguja tipo V4A modelo F, de Foxboro, motor neumático de 3-3 5 psi para ^tar-intizar una presión de suministro de 26 psia, se diseñó
el tanque 301-1, el cual será alimentado por el compresor
mediante válvula autoreguladora.
(ver Figura 12).
Como rotámetros se seleccionan 2 unidades del nodelo
lOMOlS de Fisher & Porter de 3/8", Sch No. FP-3/8 - 166-5/35 para aire.
69
Fl sistema dir^eñado presenta realimentaciór unitaria y
no recíuiere transmisor.
Como controlador se selecciona un Fisher & Porter, neumático, miniaturizado de tres modos serie 45 modelo 51 Pe,
con facilidad para montar sistemas en cascada.
(punto
de ajuste remoto).
5.4.1.3
Sistema de control secuencial (dos posiciones)
Este sistema constituido por los elementos no incluidos
en el numeral anterior, y mostrados en la Figura 12, permite simular el comportamiento de una caldera pirotubular, mediante el tanque 302-1 para el nivel, el tantiue
301-2 para presión y flujo de vapor y una serie de pilotos, que indican sucesivamente inyección de aire, ignición de electrodos, inyección de combustible y com.bustión; un elemento foto sensible simulará fallas en la
combustión.
La capacidad del tanque (efectiva es de 90 litros) que
se llenarán en un (1) minuto, esto requiere bombear 23
galones por minuto de agua a 25*C.
Con una válvula de corapuerta en la descarga, semiabierta,
la cabeza requerida es de 12 m de agua.
(16)
Se seleccionó una bomba centrífuga de 1/2 líP marca IIIM,
70
rotor con diámetro 4,5", succión 1 1/4" y descarga 1"
El tanque 302-2 (Figura 12), tiene una capacidad de
175 litros, para asegurar funcionamiento normal a la
bomba.
Como presóstato se selecciona un A^ülCROFT modelo C/505
.
20 psi.
'
J
. ..r
y
.
,
• •.
Como nivelostatos, se seleccionan dos unidade.T LS-1900,
de marca GEMS (Transamérica de Laval).
La Figura 13 muestra el circuito electror.ecánico básico para el simulador de caldera, este circuito implemen
tado en estado sólido será el construido.
71
Nivel
Mínimo
Nivel
Máximo
PI
cn
Aire
Ul
nkf
Q3
Combustible
H I
U2
H^
T2
TA
I 2S
Fotocelda
Combustión
s- I
f
Solenoide
Rl
H h
NI
Electrodos
... —
SI
TC
60S
I
Presión
Mínimo
I
Presión
Máxima
H h
<z>
TI
FACULTAD NACIONAL DE MINAS
DISEÑO
J A. Go'mez
DíBudCi
G. M. Hernández B
ESCAiA
Sin
Fttf
L
escala
v.ptiembre
LABORATORIO DE CONTROL
AUTOMÁTICO
SISTEMA DE CONTROL SECUENCIAL
1.982
FIGURA
13