Realizado: Versión: Páginas: Grupo
Anuncio

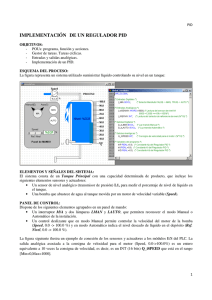
Realizado: Laboratorio Remoto de Automática Versión: Páginas: (LRA-ULE) Grupo SUPPRESS Universidad de León (Supervisión, Automatización) Control y http://lra.unileon.es 1.0 5 Tareas a realizar Programar un algoritmo de control PID digital en el autómata Schneider para el control de nivel en la maqueta industrial. En esta práctica, con el fin de familiarizarse con el uso de funciones especiales que contiene el autómata Schneider, se van a programar dos controles PID: 1. Control PID sobre el convertidor de la bomba: + - PID Actuador Bomba Sistema Transmisor Nivel Las variables a considerar en el mismo son: - Variable controlada: Nivel D02 Actuador: Convertidor Bomba P02 Se consignará inicialmente antes de arrancar el PID la variable “Bomba P02” a 1 y la “Válvula Nivel D0203” al valor necesario para que el tanque se llene a la mitad (50 %) con una consigna del convertidor de 50. Laboratorio Remoto de Automática de la Universidad de León. http://lra.unileon.es -1- 2. Control PID sobre válvula: + - PID Actuador Válvula Sistema Transmisor Nivel Las variables a considerar en el mismo son: - Variable controlada: Nivel D02 Actuador: Válvula Nivel D0203 Se consignará inicialmente antes de arrancar el PID la variable “Bomba P02” a 1 y el “Convertidor Bomba P02” al valor necesario para que el tanque se llene a la mitad (50 %) con una consigna de la válvula de 50. Pasos a seguir: Implementar la función de regulación del autómata Schneider PID con los valores adecuados para que se adapte a los lazos indicados. Llevar el sistema a la estabilidad en lazo abierto de forma que cuando llegue el nivel a la mitad sea el momento de arrancar el PID. Comprobar el comportamiento de los reguladores P, PI, PID realizando cambios de consigna: 50% al 70% 50% al 30% Laboratorio Remoto de Automática de la Universidad de León. http://lra.unileon.es -2- Con los parámetros siguientes: REGULADOR Kp Ti Proporcional (P) 4,5 PIntegral (PI) 4,05 8 PIDerivativo (PID) 5,4 5 Td 1,25 AYUDA PID La función PID utilizada en el Schneider tiene la siguiente sintaxis: PID(TAG,UNIT,PV,OUT,AUTO,PARA) Los parámetros de la función PID son los que aparecen a continuación. Parámetros de Entrada: Parámetro Input_Tag Tipo STRING Input_Unit STRING Input_PV INT Comentario Nombre del PID utilizado por el terminal. Cadena de ocho caracteres. Unidad de medida utilizada por el terminal. Cadena de seis caracteres. Entrada que representa la medida. Formato de la medida [0..10000]. Laboratorio Remoto de Automática de la Universidad de León. http://lra.unileon.es -3- Parámetros de Salida: Parámetro In_Out_Auto Tipo EBOOL Comentario Bit de entrada/salida que indica y gestiona los modos de funcionamiento del PID y del terminal: 0: manual. 1: automático. In_Out_Para ARRAY [n..m] OF INT Parámetro PID_Out Tipo INT n y m son enteros positivos, negativos o nulos. Tabla de entrada/salida de ajuste del PID. Los 16 primeros valores se describen a-continuación; los valores restantes se utilizan para un tratamiento interno. Tabla de 43 enteros. Comentario Salida analógica del PID; si Ti=0, se agrega un offset de 5000 a la salida OUT en modo automático. Salida con formato [0;+10000]. La tabla siguiente muestra los distintos parámetros de la tabla PARA: Parámetro SP OUT_MAN KP Rango PARA[0] PARA[1] PARA[2] TI PARA[3] TD PARA[4] Función Consigna interna en formato 0–10.000. Valor de la salida manual de PID (entre 0 y 10.000). Ganancia proporcional de PID (x100), con signo sin unidad (10.000<KP<+10.000). El signo Kp determina la dirección de la acción de PID (negativo: directa, positivo: inverso). El tiempo de integración de PID (entre 0 y 20.000) aparece en 0,1 segundos. El tiempo diferencial de PID (entre 0 y 10.000) aparece en 0,1 segundos. Laboratorio Remoto de Automática de la Universidad de León. http://lra.unileon.es -4- TS PARA[5] El periodo de muestreo de PID (entre 1 y 32.000) aparece en 0,01 segundos. El periodo de muestreo real será el múltiplo del periodo de la tarea en la que se presente el PID más cercano a TS. OUT_MAX PARA[6] Límite superior de la salida de PID en modalidad automática (entre 0 y 10.000). OUT_MIN PARA[7] Límite inferior de la salida de PID en modalidad automática (entre 0 y 10.000). PV_DEV PARA[8].0 Elección de acción derivada 0 = variable en proceso, 1 = en desviación. NO_BUMP PARA[8].4 Modalidad bumpless o no bumpless. 0 = no bumpless, 1 = bumpless. DEVAL_MMI PARA[8].8 = 1: inhibe la confirmación de PID por parte de la interfase hombre–máquina. = 0: el PID está operativo mediante la interfase hombre–máquina. Este bit posibilita evitar que el terminal no realice conversiones de escala en los PID no operativos y permite seleccionar los PID operativos, especialmente cuando hay más de nueve PID en la aplicación. PV_SUP* PARA[9] Límite superior del rango de escala de medidas en una unidad física (x100) (entre -9.999.999 y +9.999.999). PV_INF* PARA[11] Estos dos enteros son, respectivamente, el de mayor valor y el de PARA[12] menor valor de un entero doble, que es el límite inferior del rango de la escala de medidas en una unidad física (x100) (entre 9.999.999 y + 9.999.999). PV_MMI* PARA[13] Estos dos enteros son, respectivamente, el de mayor valor y el de PARA[14] menor valor de un entero doble, que es la imagen de la medición en una unidad física (x100). SP_MMI* PARA[15] Estos dos enteros son, respectivamente, el de mayor valor y el de PARA[16] menor valor de un entero doble, que es la consigna del operador y la imagen de la consigna en una unidad física (x100). * Valor utilizado por el terminal del operador. Laboratorio Remoto de Automática de la Universidad de León. http://lra.unileon.es -5-